
Akademia Górniczo-Hutnicza w Krakowie
Wydział EAIiE
Katedra Elektroniki
LABORATORIUM SPINTRONIKI I
Inżynieria materiałowa i konstrukcja
urządzeń
Temat ćwiczenia:
Wyznaczanie parametrów magneto-elektrycznych
elementów spintronicznych typu TMR
2010 r.
Nr
ćwiczenia
5
IMiKU – Katedra Elektroniki AGH – Laboratorium Spintroniki I
2
I. Cel ćwiczenia
Celem ćwiczenia jest zapoznanie się z budową, zasadą działania i metodami wyznaczania
parametrów
magneto-elektrycznymi
elementów
spintronicznych
typu
tunelowa
magnetorezystancja (TMR).
II. Wprowadzenie
Elementy spintroniczne cechuje przewodnictwo, które może być sterowane zarówno
polem elektrycznym jak i magnetycznym. Ponadto elementy spintroniczne mogą wykazywać
nieulotny (zachowany po odłączeniu zasilania) stabilny stan wysoko lub nisko-rezystancyjny,
który związany jest z ich magnetyzmem. Duwzaciskowe elementy spintroniczne, o potencjale
komercyjnym, wykorzystują w swojej budowie cienkowarstwowe (grubości nanometrowe)
struktury materiałów wykazujące efekty gigantycznej (GMR) i tunelowej (TMR)
magnetorezystancji. Magnetyczne złącze tunelowe (MTJ), wykazujące efekt TMR, jest
dwuzaciskowym
elementem, który posiada niespotykane
w innych elementach
spintronicznych właściwości, do których należą: modyfikowalna w szerokim zakresie (od
omów do megaomów) rezystancja i bardzo duży współczynnik tunelowej magnetorezystancji
(do 1000 %). Dzięki tym właściwościom magnetyczne złącze tunelowe stało się kluczowym
elementem magnetorezystancjnych pamięci MRAM (Magnetic Random Access Memory)
przełączalnych polem magnetycznym.
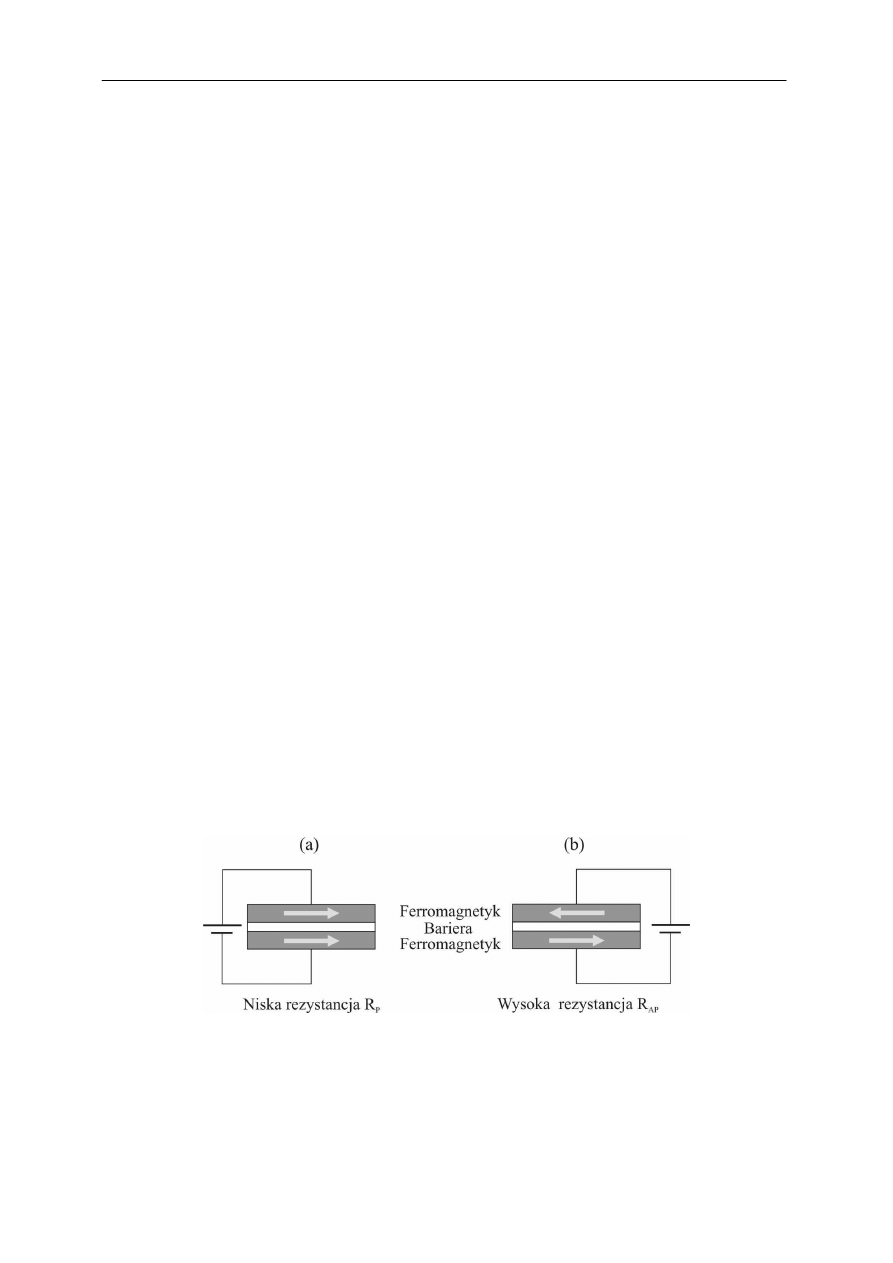
Element TMR w podstawowej formie składa się z dwóch ferromagnetycznych
elektrod przedzielonych dielektrykiem (bariera) (Rys. 1). Działanie elementu opiera się na
wykorzystaniu zjawiska tunelowania elektronów przez barierę potencjałów, które jest zależne
od parametrów bariery, wzajemnego kierunku namagnesowania elektrod (tunelowanie
spinowo zależne) oraz przyłożonego napięcia. W efekcie spinowo zależnego tunelowania
elektronów złącze wykazuje dwa stany rezystancyjne, wysoki i niski. Niski stan rezystancyjny
(R
P
) występuje, gdy kierunki namagnesowania elektrod złącza są równoległe (Rys. 1a)
natomiast wysoki stan rezystancyjny (R
AP
) występuje, gdy kierunki namagnesowania elektrod
złącza są antyrównoległe (Rys. 1b).
Rys. 1. Budowa i konfiguracje magnetyczne, w których występuje stan nisko i wysoko-
rezystancyjny elementu TMR. Strzałki oznaczają kierunki namagnesowania elektrod
ferromagnetycznych.
IMiKU – Katedra Elektroniki AGH – Laboratorium Spintroniki I
3
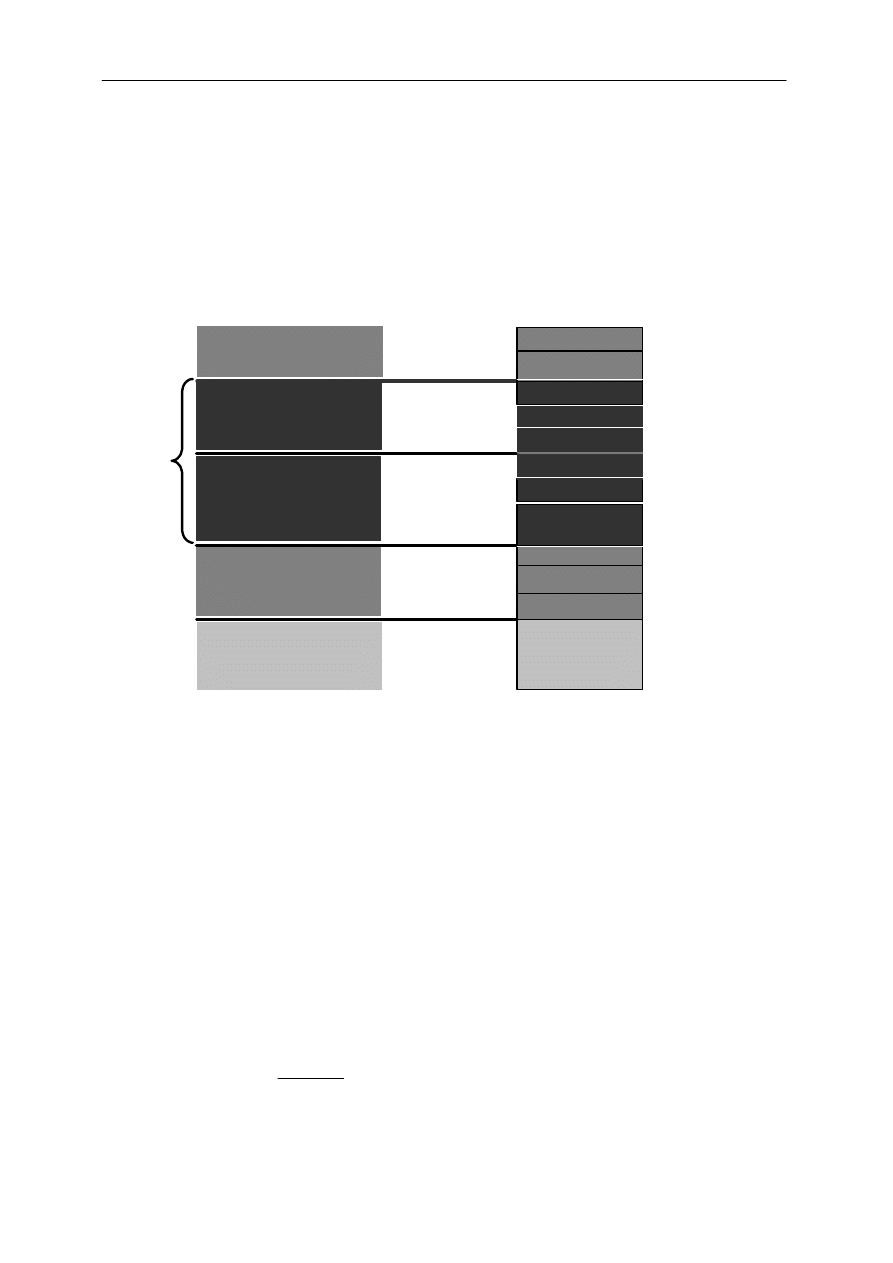
Struktura warstwowa aplikacyjnych elementów TMR składa się z kilkunastu warstw
różnych materiałów (Rys. 2a, b), o grubościach od ułamka nanometra do kilkudziesięciu
nanometrów, które można podzielić na warstwy: buforowe, aktywne i zabezpieczające.
Warstwy aktywne składają się z warstw odpowiedzialnych za efekt TMR (FM/bariera
dielektryczna/FM). W układzie tym dolną warstwę FM zamocowuje się magnetycznie (cz.
uniemożliwia się jej zmianę kierunku namagnesowania poprzez oddziaływanie wymienne
typu „exchange bias”) na styku warstw FM/antyferromagnetyk, pozostawiając natomiast
górną warstwę FM (elektroda górna) swobodną magnetycznie. Element o takiej budowie nosi
nazwę zawór spinowy.
Rys. 2. Struktura warstwowa elementu TMR typu zawór spinowy z podziałem na części
funkcjonalne (a), przykładowa struktura warstwowa elementu TMR (grubości w nm) (b).
A. Pomiary charakterystyk rezystancja od pola magnetycznego
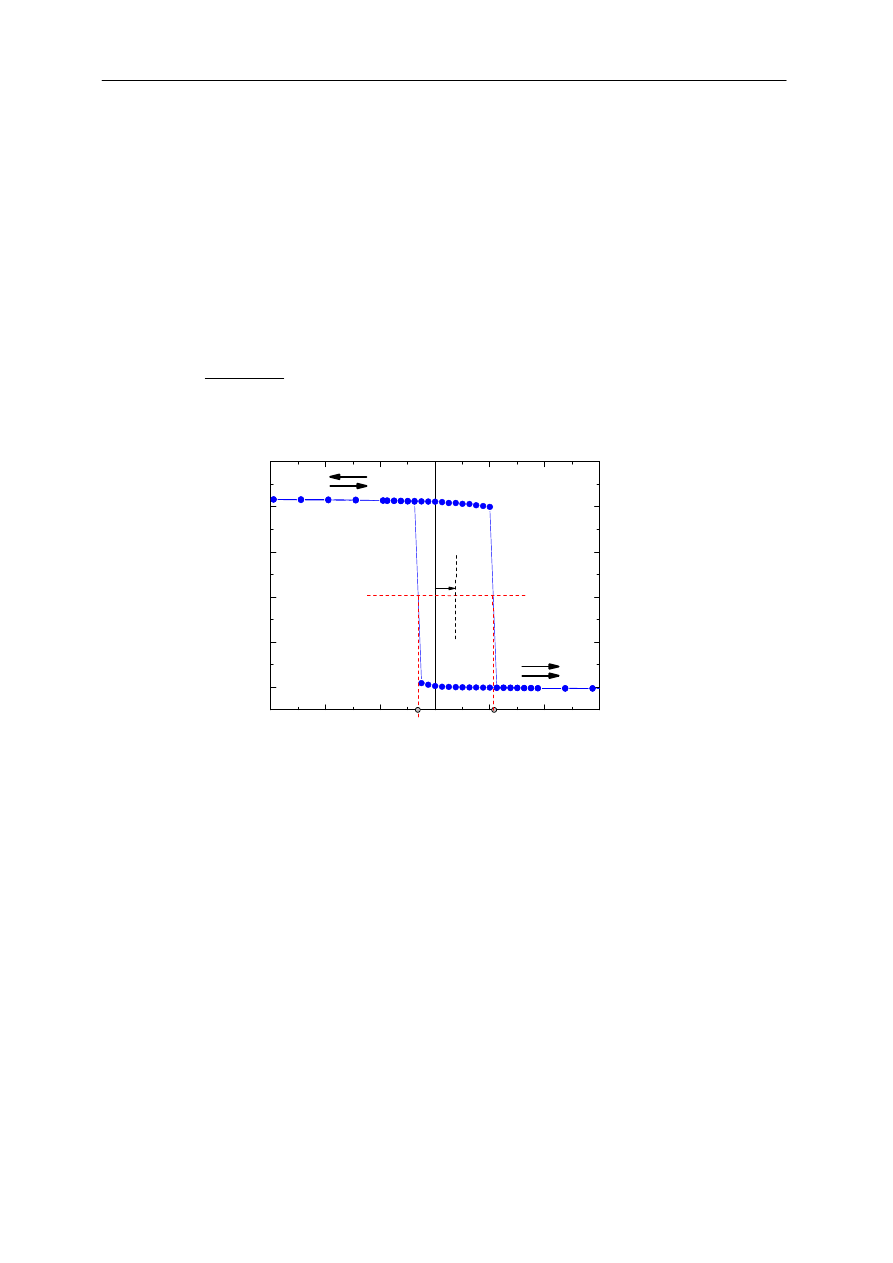
W badaniu właściwości statycznych elementów spintronicznych, pomiar charakterystyki
rezystancja od pola magnetycznego (R-H) jest jednym z podstawowych. Rysunek 3
przedstawia przykładową charakterystykę R-H elementu TMR typu zawór spinowy. Z
charakterystyki tej wyznacza się tunelową magnetorezystancję, pola przełączeń warstwy
swobodnej oraz pole przesunięcia charakterystyki względem zera pola.
Tunelowa magnetorezystancja
Tunelową magnetorezystancję definiuje się jako:
%
100
⋅
−
=
P
P
AP
R
R
R
TMR
(1)
gdzie R
AP,
R
P
rezystancja wysoka i niska elementu.
FM/ B/ FM
Podło
ż
e
Buforowe
“Exchange
Bias”
Zabezpieczaj
ą
ce
Warstwy
aktywne
Si/SiO
Ta 5
Ru 18
Ta 3
PtMn 20
CoFe 2
Ru 0.9
CoFeB 3
MgO 1.2
CoFeB 3
Ru 5
Ta 5
Swobodna
Zamocowana
(a)
(b)
IMiKU – Katedra Elektroniki AGH – Laboratorium Spintroniki I
4
Pola przełączeń warstwy swobodnej
Pole H
P1
jest to pole, dla którego rezystancja elementu R= (R
AP
+R
P
)/2 przy przejściu z stanu
wysokiej do niskiej rezystancji.
Pole H
P2
jest to pole, dla którego rezystancja elementu R= (R
AP
+R
P
)/2 przy przejściu z stanu
niskiej do wysokiej rezystancji.
Pole przesunięcia charakterystyki R-H
Pole przesunięcia definiuje równanie:
2
2
1
P
P
S
H
H
H
+
=
(2)
Rys. 3. Charakterystyka R-H elementu TMR. H
P1
i H
P2
– pola przełączenia warstwy
swobodnej, H
S
– pole przesunięcia. Strzałki oznaczają kierunki namagnesowania warstwy
swobodnej (górna) i zamocowanej (dolna).
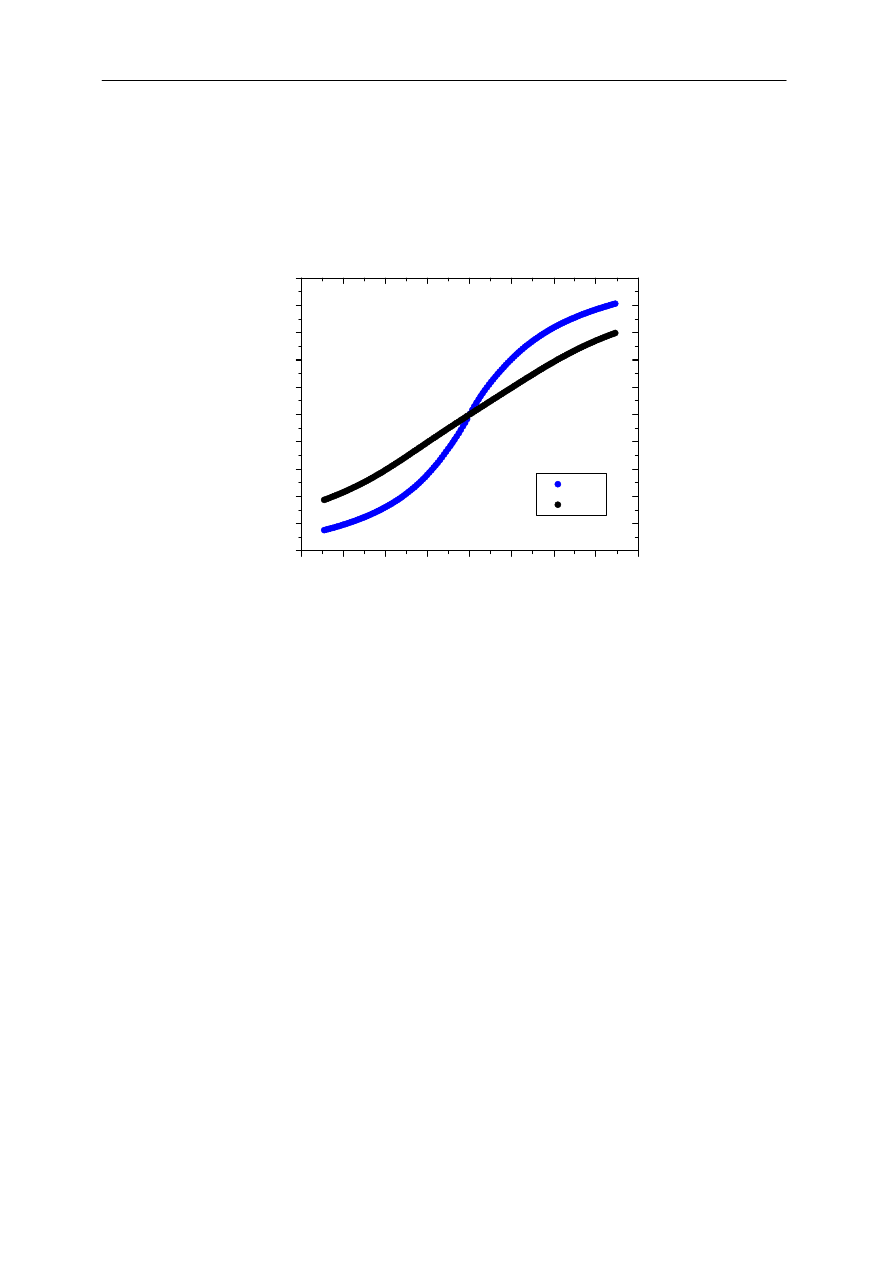
B. Pomiary charakterystyk napięciowo-prądowych
W badaniu właściwości statycznych elementów spintronicznych pomiar charakterystyk I-V
lub V-I jest kolejny z podstawowych pomiarów. Rysunek 4 przedstawia przykładową
charakterystykę V-I elementu TMR typu zawór spinowy.
Z charakterystyki napięcie-prąd
(V-I) lub prąd-napięcie (I-V) w stanie wysokiej (R
AP
) i niskiej (R
P
) rezystancji wyznacza się
napięcia V
1/2
i napięcie przebicia oraz określa się charakter zmienności TMR, R
AP
i R
P
od
napięcia lub prądu.
Napięcie V
1/2
Jest to napięcie, dla którego TMR maleje do połowy wartości, jaką wykazuje przy najniższym
napięciu pomiarowym.
-120
-80
-40
0
40
80
120
80
100
120
140
160
180
R
AP
H
S
H
P1
R
e
z
y
s
ta
n
c
ja
(
O
h
m
)
Pole (Oe)
H
P2
R
P
IMiKU – Katedra Elektroniki AGH – Laboratorium Spintroniki I
5
Napięcie przebicia
Jest to napięcie, przy którym następuje przebicie bariery dielektrycznej, czego objawem jest
bardzo duży spadek rezystancji i tunelowej magnetorezystancji elementu.
Rys. 4. Charakterystyka V-I elementu TMR w stanie wysokie (AP) i niskiej rezystancji (P).
C. System pomiarowy
Pomiar charakterystyki R-H polega na wyznaczeniu zmienności rezystancji elementu w
zadanym zakresie zmienności pola magnetycznego. Zakres zmienności pola dobiera się tak,
aby uzyskać na charakterystyce R-H stan wysokiej i niskiej rezystancji.
Pomiar charakterystyki I-V lub V-I wykonuje się (najczęściej) w polu magnetycznym, które
wprowadza element w stan wysokiej i niskiej rezystancji. Zakres zmienności napięcia lub
prądu dobiera się tak, aby nie przekroczyć napięci przebicia elementu.
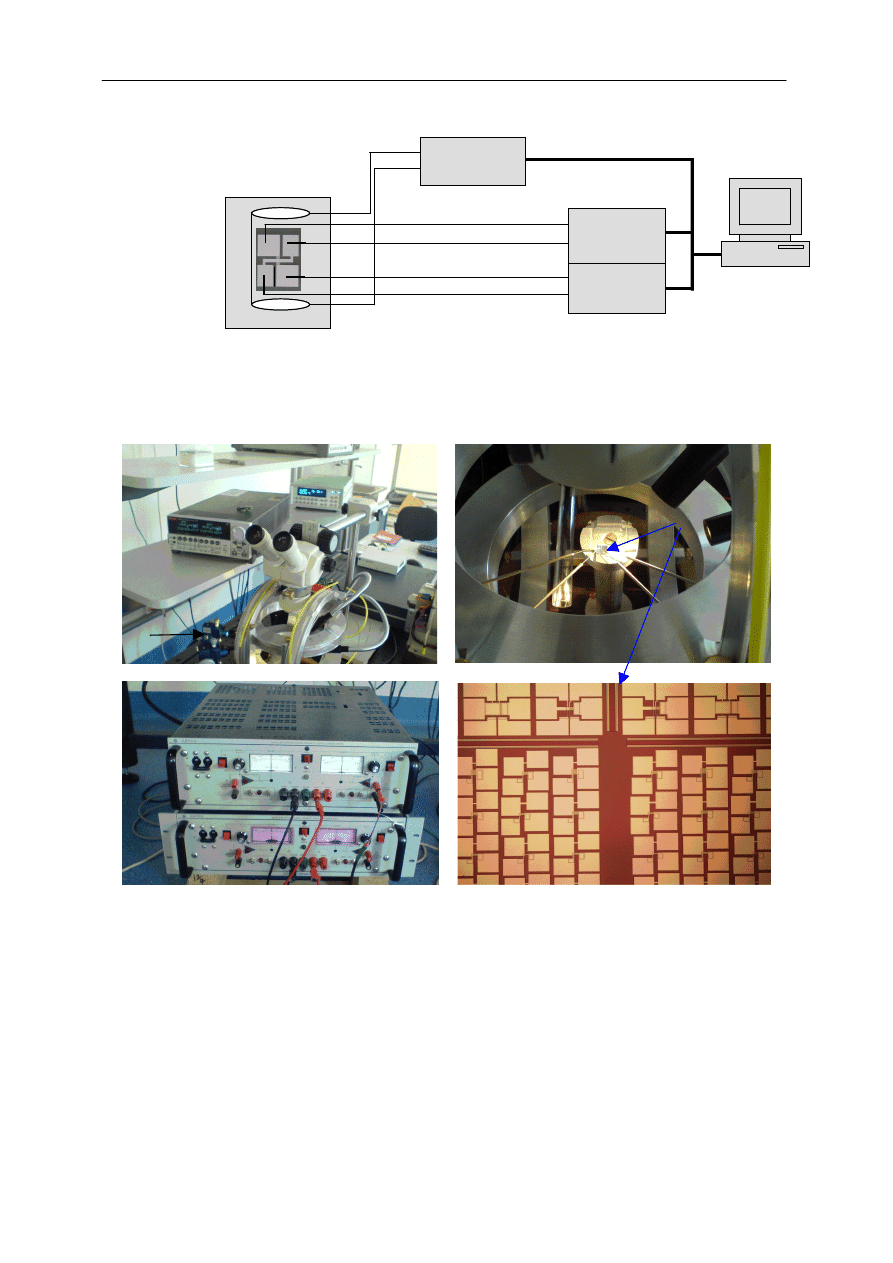
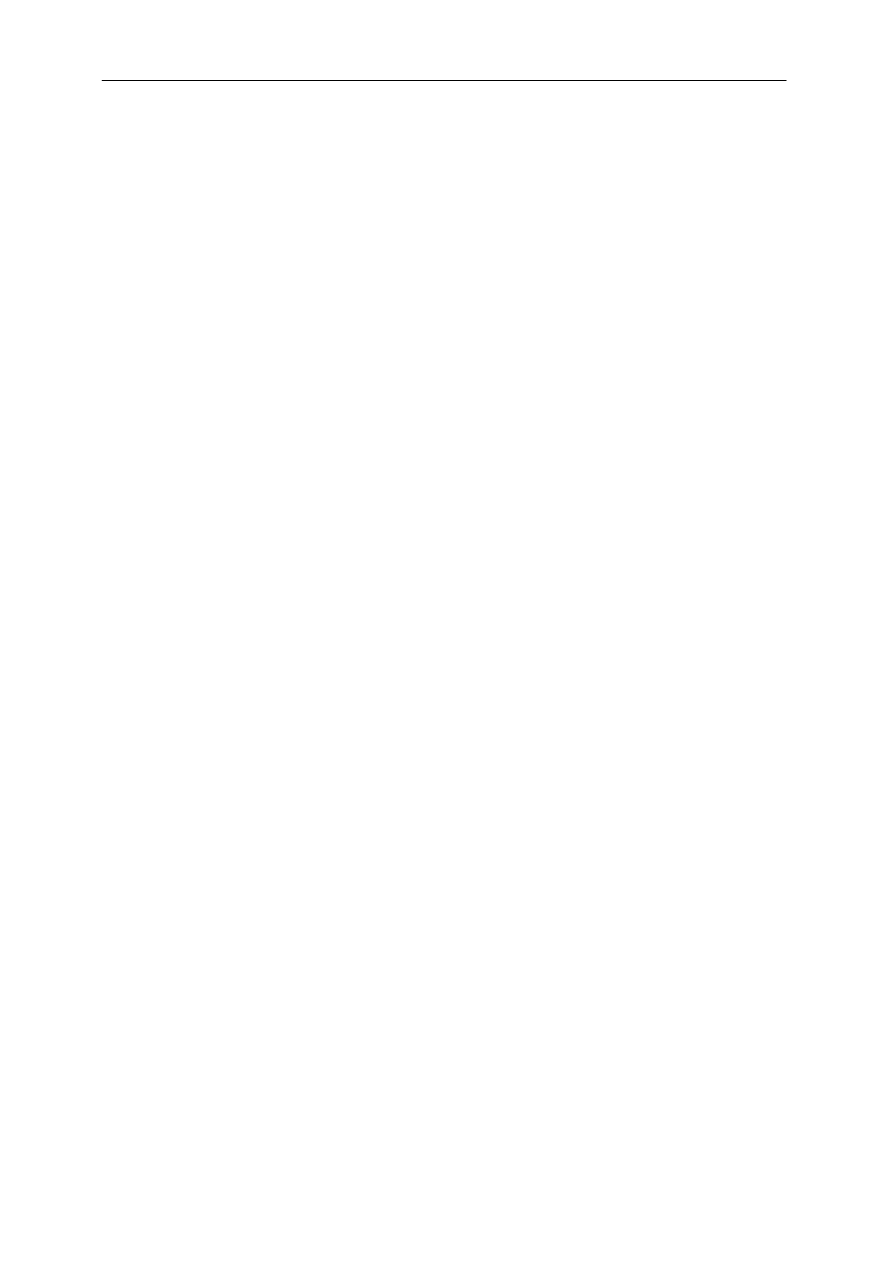
Pomiary wymienionych charakterystyk wykonuje się systemem, którego widok przedstawia
rys 5, a schemat blokowy rys. 6. Podstawowymi elementami systemu są: źródło-miernik
prądu/napięcia, źródło pola magnetycznego, zasilacz prądowy. Ponieważ elementy do badań
laboratoryjnych dostarczane są najczęściej w formie „waferów” lub ich części (Rys. 6)
konieczne jest ich umieszczenie na specjalnym stoliku i użycie głowic pomiarowych.
-8
-6
-4
-2
0
2
4
6
8
-1.0
-0.8
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
0.8
1.0
AP
P
V
o
lt
a
g
e
(
V
)
Current (mA)
IMiKU – Katedra Elektroniki AGH – Laboratorium Spintroniki I
6
Głowice
pomiarowe
Igłowe
G
P
IB
B
u
s
I/U
Miernik
Ź
ródło
Pr
ą
du
I/U
Ź
ródło
Ź
ródło pola
magnetycznego
Głowice
pomiarowe
Igłowe
G
P
IB
B
u
s
I/U
Miernik
Ź
ródło
Pr
ą
du
I/U
Ź
ródło
Ź
ródło pola
magnetycznego
G
P
IB
B
u
s
I/U
Miernik
Ź
ródło
Pr
ą
du
I/U
Ź
ródło
Ź
ródło pola
magnetycznego
Rys. 5. Schemat blokowy systemu pomiarowego.
Rys. 6. Widoki elementów systemu pomiarowego. 1 – źródło-miernik prądu i napięcia, 2 –
miernik pola magnetycznego, 3 – źródło pola magnetycznego (cewki), 4 – głowice
pomiarowe, 5 – część „wafla” z elementami do pomiarów czterozaciskowych,
6 – zasilacze prądowe.
1
2
3
4
6
5
IMiKU – Katedra Elektroniki AGH – Laboratorium Spintroniki I
7
III. Wykonanie ćwiczenia
Przygotowanie do pomiarów
1. Zapoznanie z elementami składowymi systemu pomiarowego.
2. Zapoznanie z metodą podłączania głowic pomiarowych do elementów na waflu (wafer).
3. Zapoznanie z programem do sterowania i rejestracji danych pomiarowych.
1. Pomiary charakterystyk rezystancja-pole magnetyczne
•
Wybrać złącza do pomiarów na waflu dostarczonym przez prowadzącego.
•
Podłączyć głowice pomiarowe do wybranego złącza.
•
Wykonać wstępny pomiar charakterystyki R-H w celu dobrania zakresu pola i jego
kroku.
•
Wykonać pomiary charakterystyk R-H złącz o różnych rozmiarach dla napięć
zasilania podanych przez prowadzącego.
2. Pomiary charakterystyk I-V i napięcia przebicia
Dla uprzednio podłączonych elementów wykonać pomiary:
•
charakterystyk I-V lub do 900 mV w konfiguracji wysokiej i niskiej rezystancji
•
charakterystyk I-V do poziomu napięcia powodującego przebicie złącza.
IMiKU – Katedra Elektroniki AGH – Laboratorium Spintroniki I
8
IV. Opracowanie wyników
Sprawozdanie z wykonania ćwiczenia powinno zaczynać się tabelką
Inżynieria Materiałowa i Konstrukcja Urządzeń
Tytuł:
Imię Nazwisko:
Numer zespołu:
Data wykonania ćwiczenia:
Wydział, rok, grupa:
Uwagi:
Ocena:
1. Pomiary charakterystyk R-H
a) Opisać budowę (strukturę warstwową) mierzonych złącza.
b) Przedstawić na wykresie charakterystyki R-H dla różnych napięć zasilania złącz.
c) Wyznaczyć:
•
Tunelową magnetorezystancję zgodnie z równaniem (1),
•
Pola przełączeń (H
P1,2
) warstwy swobodnej oraz pole przesunięcia (H
S
)
charakterystyki R-H względem zera pola, równanie (2).
2. Pomiary charakterystyk I-V i napięcia przebicia
a) Przedstawić na wykresie zależność I-V dla stanu niskiej i wysokiej rezystancji.
b) Przedstawić na wykresie zależność R-V dla stanu niskiej i wysokiej rezystancji oraz
omówić charakter zmian tych rezystancji.
c) Przedstawić na wykresie zależność
∆
R-V, gdzie
∆
R=(R
AP
-R
P
).
d) Przedstawić na wykresie zależność TMR-V i wyznaczyć napięcie V
1/2
.
e) Przedstawić na wykresie zależność G-V dla stanu niskiej (G
AP
) i wysokiej (G
P
)
konduktancji.
f) Przedstawić na wykresie zależność
∆
G-V, gdzie
∆
G=(G
P
-G
AP
) i omówić jej charakter
zmian.
g) Wyznaczyć z dynamiczne konduktancje dI/dV w stanie wysokiej i niskiej rezystancji-,
poprzez numeryczne różniczkowanie charakterystyki (I-V)- oraz przedstawić jej na
wykresie.
Literatura:
M. Ziese, M. J. Thornton,
Spin electronics, Springer, Berlin (2001).
A. Fert,
Geneza, rozwój i przyszłość spintroniki, Postępy fizyki, Tom 59, Zeszyt 6, (2008).
Opracował Piotr Wiśniowski
Wyszukiwarka
Podobne podstrony:
instrukcje cw z chemii
Instrukcja cw 4 wysalanie
Instrukcja Ćw 5
Instrukcja Ćw 4
Instrukcja cw 3 Metody biotechnologii
Instrukcja ćw 2, technologia żywności, chłodnictwo
instrukcja cw 1, II rok, II semestr, Chemia wody i powietrza
FIZYKA - instrukcja, cw 9, WYŻSZA SZKOŁA INŻYNIERII DENTYSTYCZNEJ
INSTRUKCJE, Ćw nr 12. Bilans cieplny, Instrukcja wykonawcza
Instrukcja cw 3 PI id 216486 Nieznany
INSTRUKCJE, Ćw nr 5. I-U, Ćwiczenie 7
instrukcja cw 1 trawienie
Instrukcja cw 2 Metody biotechnologii
instrukcja cw 20 id 216489 Nieznany
Instrukcja cw 3
instrukcja 4 cw 6
8 Zalacznik do polecenia pisemnego 2, Politechnika Lubelska, Elektrotechnika mgr EE, Semestr 2, Pomi
FIZYKA - instrukcja, cw 10, WYŻSZA SZKOŁA INŻYNIERII DENTYSTYCZNEJ
INSTRUKCJE, Ćw nr 11. Przewodnictwo cieplne, WSB
więcej podobnych podstron