
Chaos deterministyczny
Marek Domański
Materiały pomocnicze do wykładu
Teoria Systemów
Politechnika Poznańska
© Marek Domański
Materiały są przeznaczone wyłącznie do użytku podczas zajęć
z przedmiotu Teoria Systemów prowadzonych przez
prof. Marka Domańskiego na studiach
na kierunku Elektronika i Telekomunikacja.
Uwaga:
Niektóre ilustracje pochodzą z podręczników zalecanych jako pomocnicze do przedmiotu.
Kopiowanie, rozpowszechnianie i używanie w innych celach jest
stanowczo zabronione.
W szczególności, nieuprawnione rozpowszechnianie
drogą elektroniczną np. w Internecie jest nielegalne
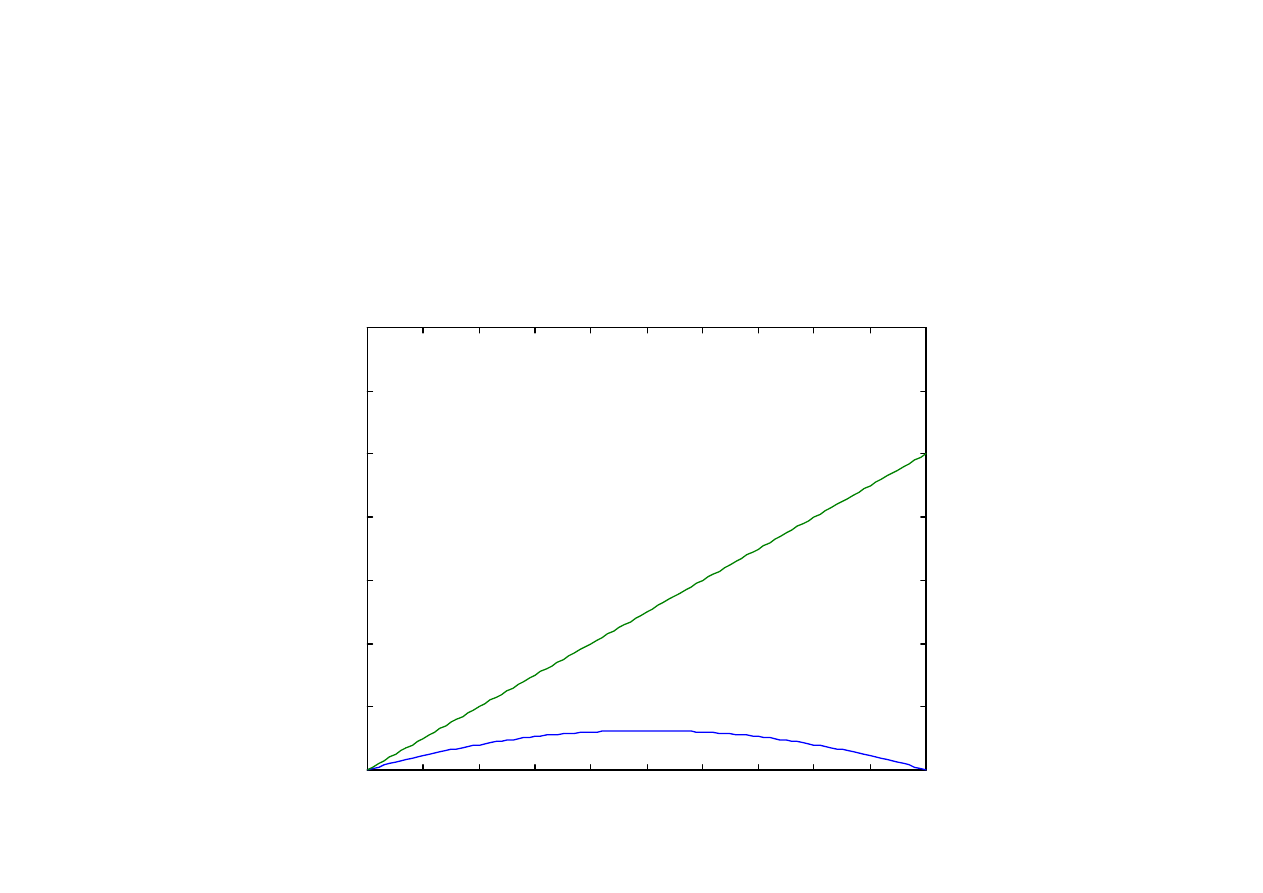
Odwzorowanie logistyczne
x(n+1) = r·x(n)[1 – x(n)]
Przypadek 0 < r < 1
Wykres odwzorowania dla r = 0,5
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0
0.2
0.4
0.6
0.8
1
1.2
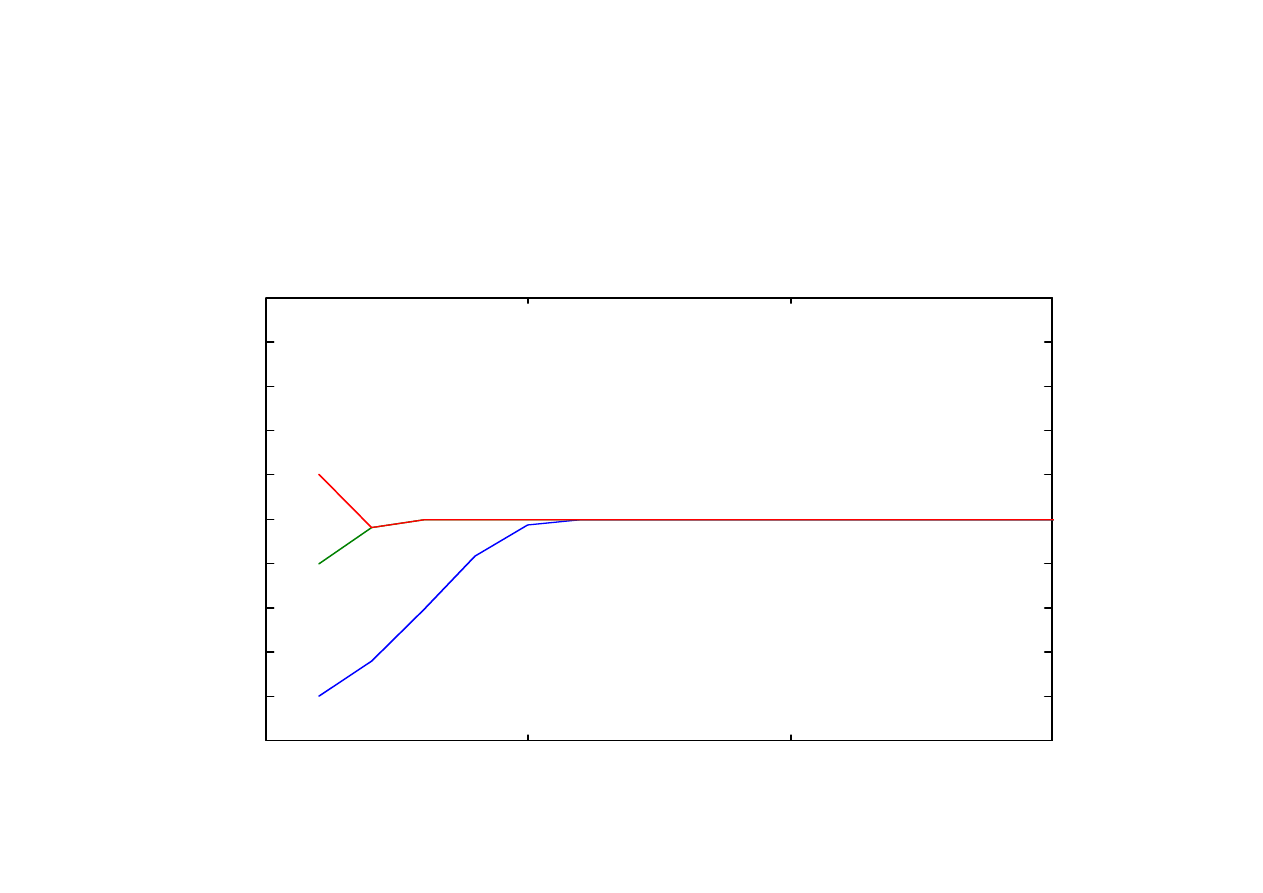
Wartości zmiennej stanu
dla warunków początkowych
x(1) = 0,300, x(1) = 0,700, x(1) = 0,950
Parametr r = 0,5
0
2
4
6
8
1 0
1 2
0
0 . 1
0 . 2
0 . 3
0 . 4
0 . 5
0 . 6
0 . 7
0 . 8
0 . 9
1
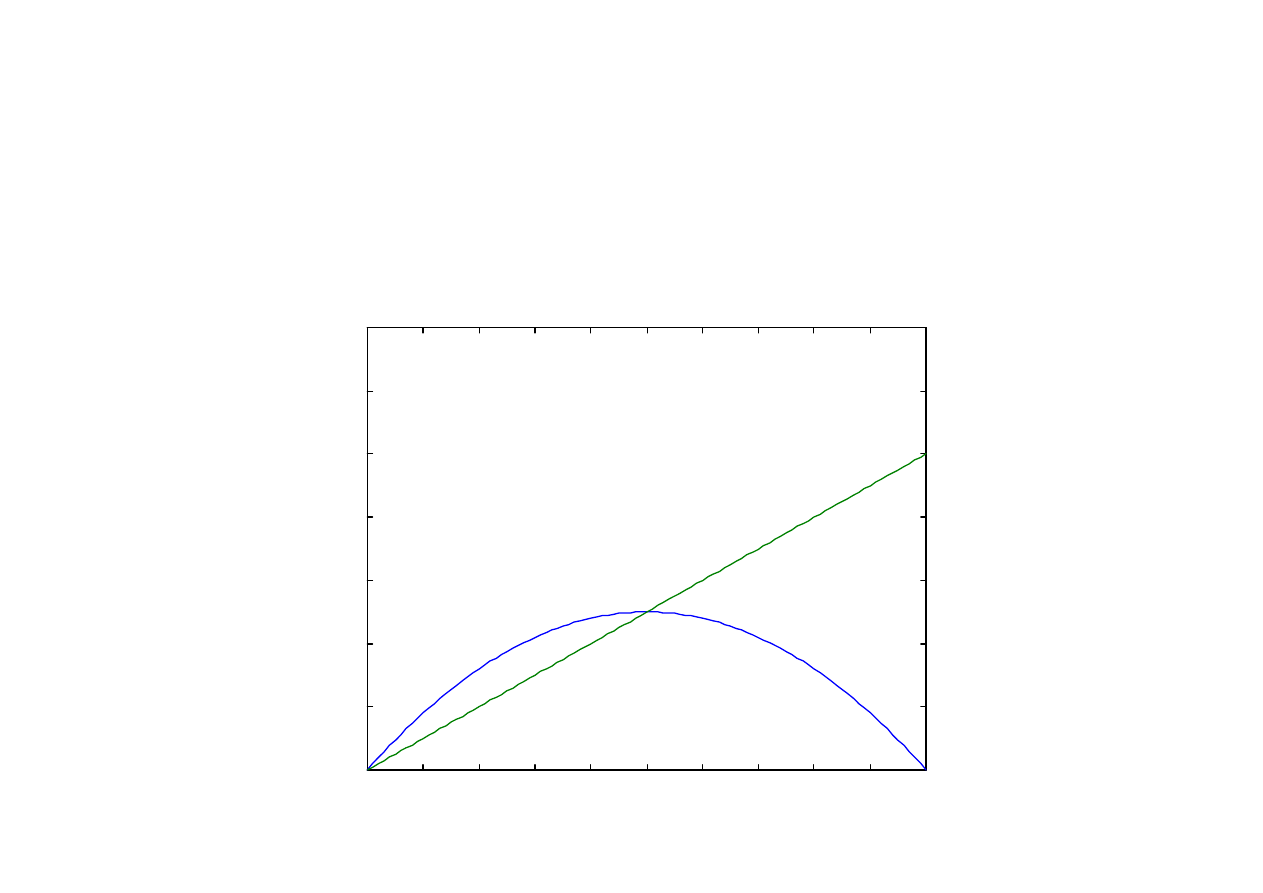
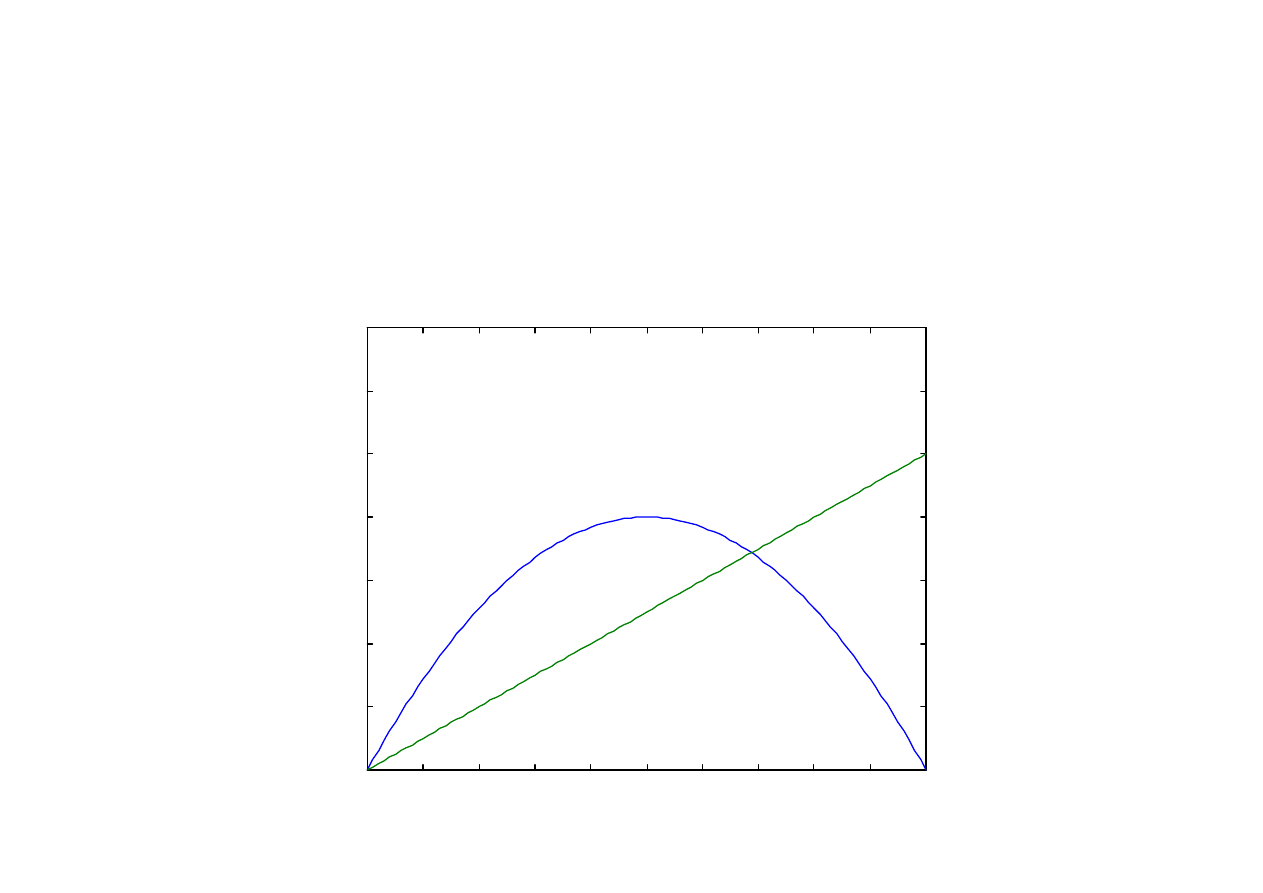
Odwzorowanie logistyczne
x(n+1) = x(n)[1 – x(n)]
Przypadek 1< r < 3
Wykres odwzorowania dla r = 2,0
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0
0.2
0.4
0.6
0.8
1
1.2
Wartości zmiennej stanu
dla warunków początkowych
x(1) = 0,1; x(1) = 0,4; x(1) = 0,6
Parametr r = 0,5
0
5
1 0
1 5
0
0 . 1
0 . 2
0 . 3
0 . 4
0 . 5
0 . 6
0 . 7
0 . 8
0 . 9
1
Odwzorowanie logistyczne
x(n+1) = r·x(n)[1 – x(n)]
Przypadek r > 3
Wykres odwzorowania dla r = 3,2
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0
0.2
0.4
0.6
0.8
1
1.2
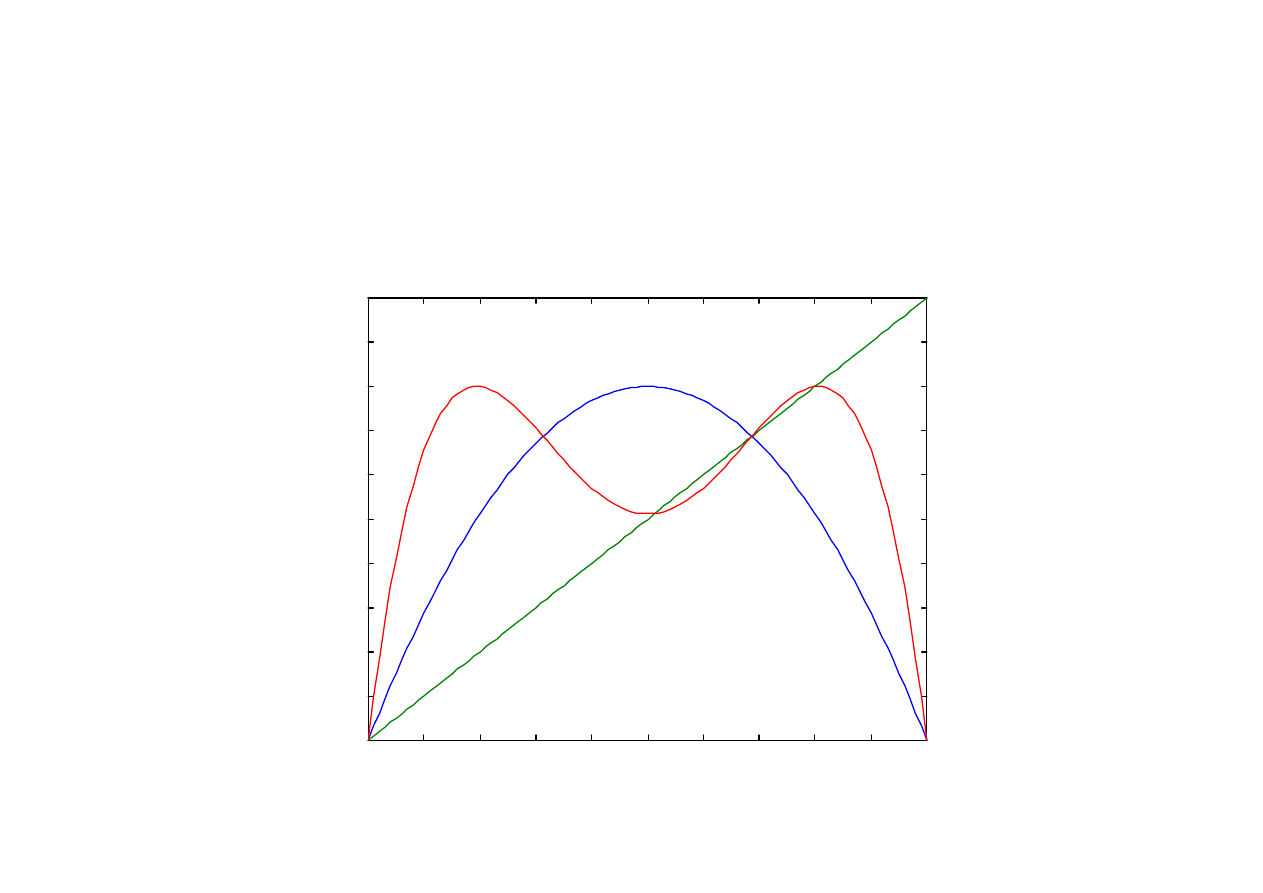
Odwzorowanie F
2
dla odwzorowania logistycznego
x(n+1) = F[x(n)] dla r = 3,2
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
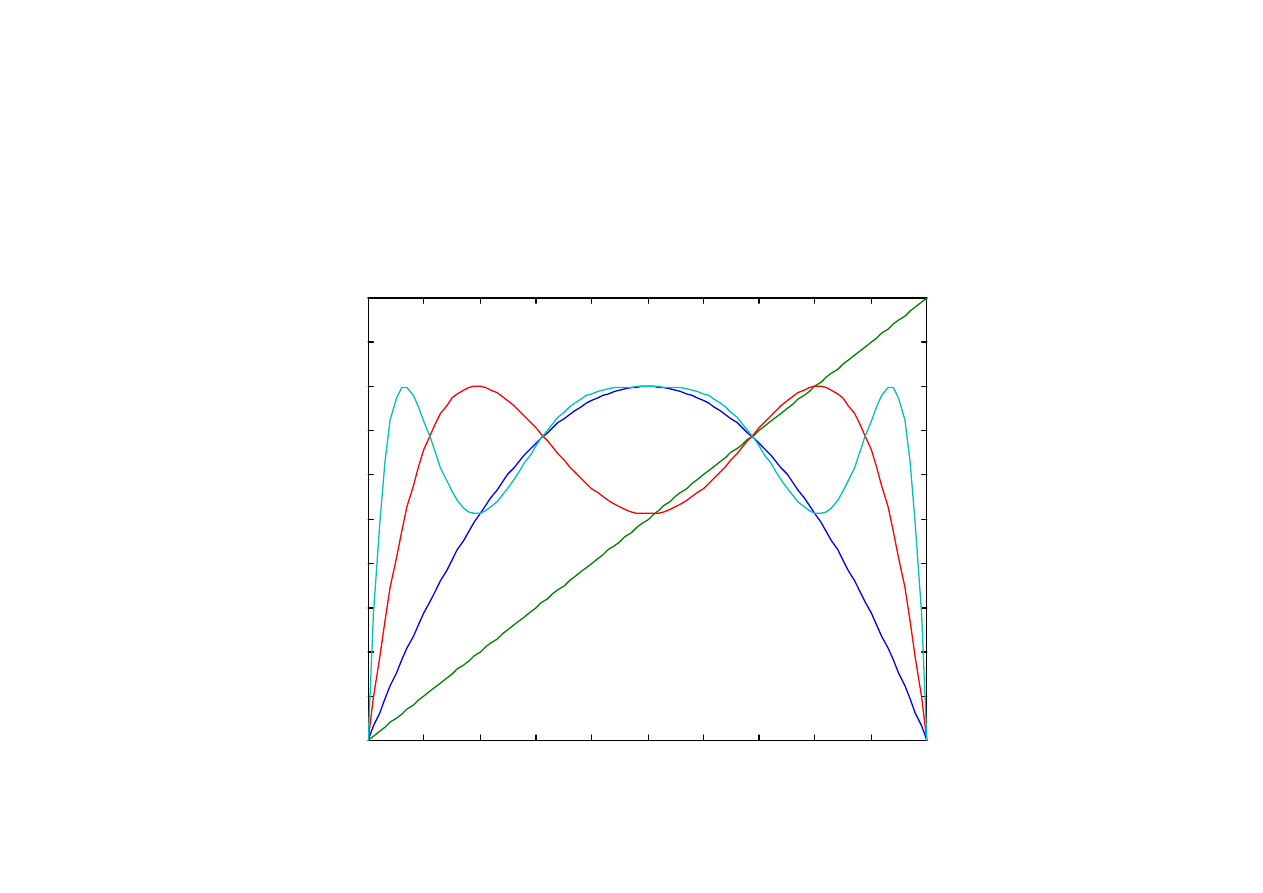
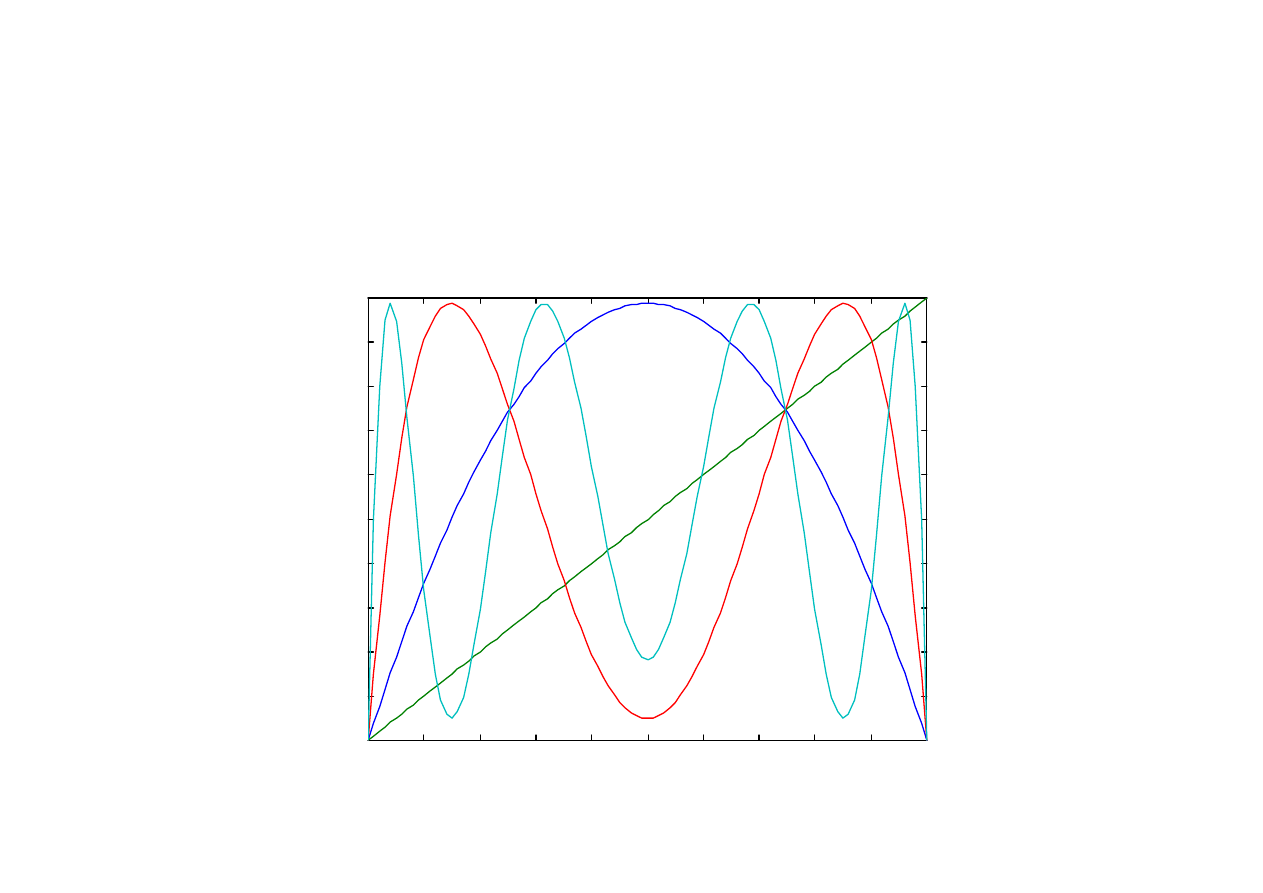
Odwzorowanie F
4
dla odwzorowania logistycznego
x(n+1) = F[x(n)] dla r = 3,2
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
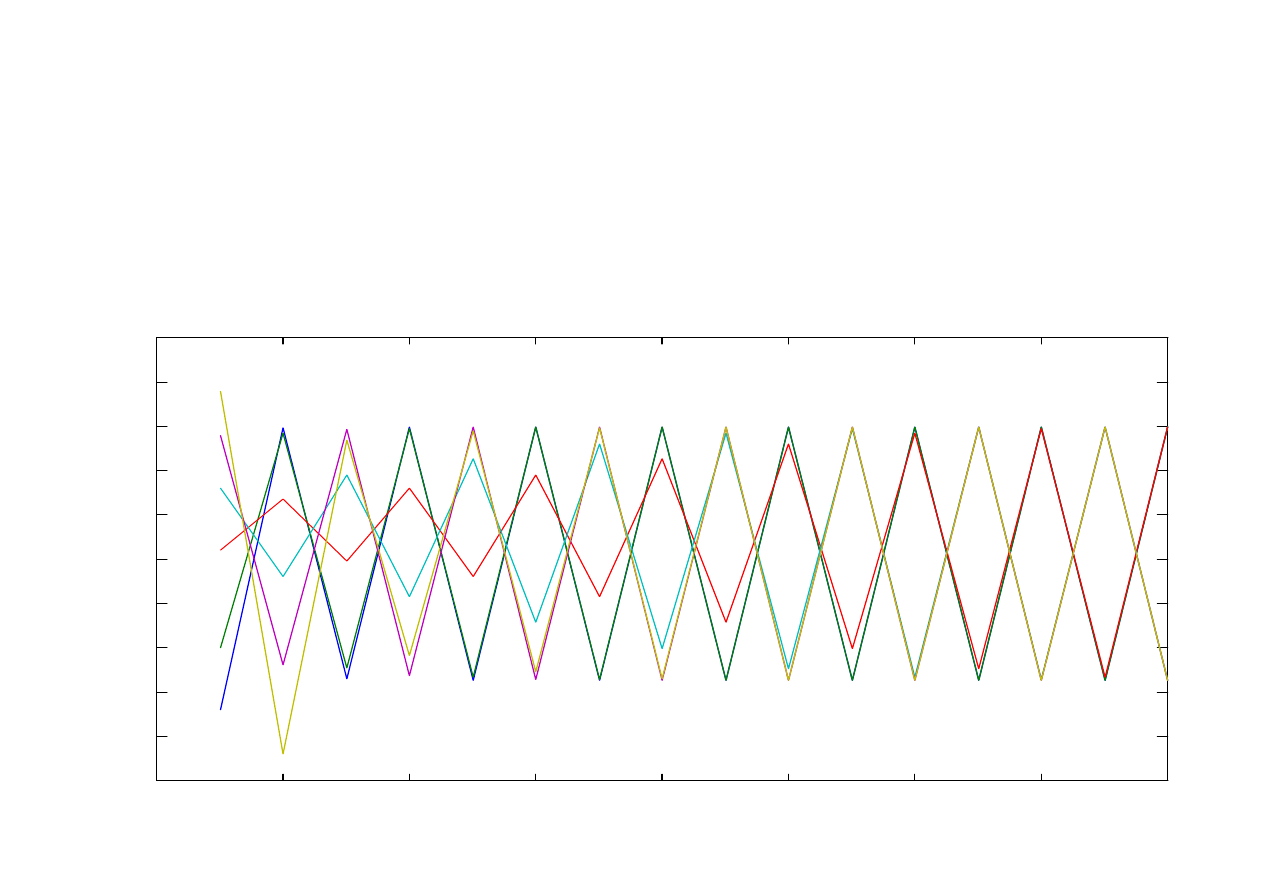
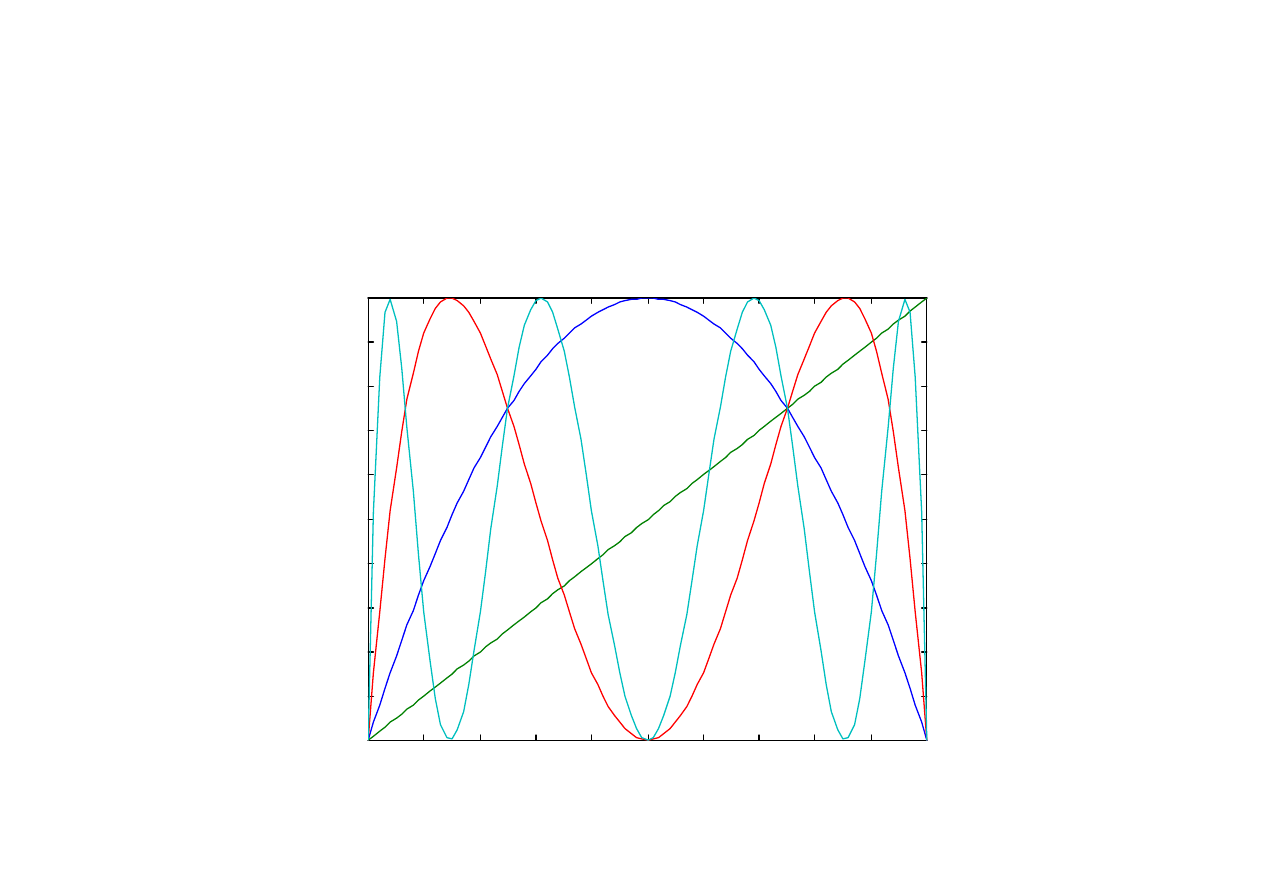
Zmienna stanu jako funkcja czasu
dla warunków początkowych
x(1) = 0,48; x(1) = 0,55; x(1) = 0,66 ;
x(1) = 0,73 ; x(1) = 0,79 ; x(1) = 0,84
Parametr r = 3,2
0
2
4
6
8
1 0
1 2
1 4
1 6
0 . 4
0 . 4 5
0 . 5
0 . 5 5
0 . 6
0 . 6 5
0 . 7
0 . 7 5
0 . 8
0 . 8 5
0 . 9
Odwzorowanie F
4
dla odwzorowania logistycznego
x(n+1) = F[x(n)] dla r = 3,95
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
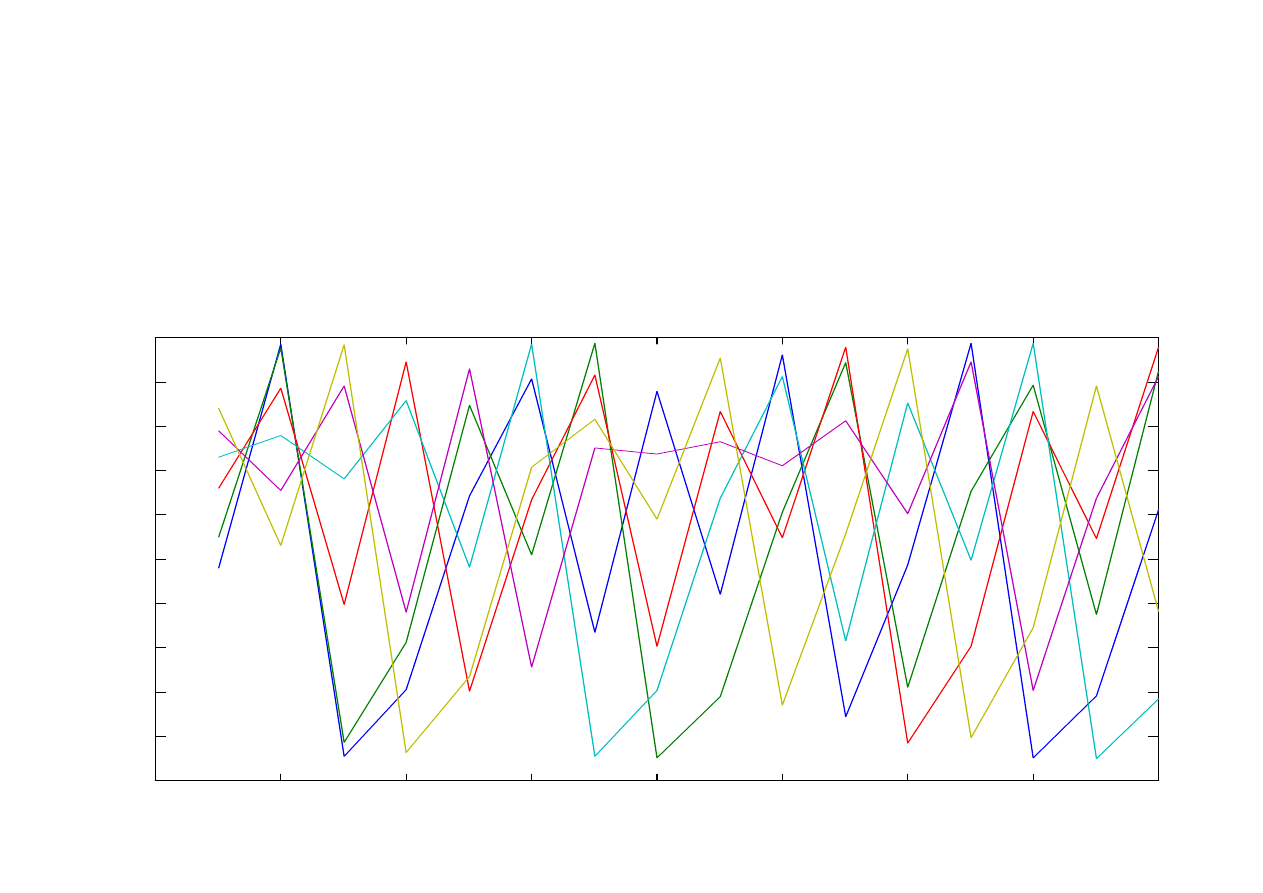
Zmienna stanu jako funkcja czasu
dla warunków początkowych
x(1) = 0,48; x(1) = 0,55; x(1) = 0,66 ;
x(1) = 0,73 ; x(1) = 0,79 ; x(1) = 0,84
Parametr r = 3,95
0
2
4
6
8
1 0
1 2
1 4
1 6
0
0 . 1
0 . 2
0 . 3
0 . 4
0 . 5
0 . 6
0 . 7
0 . 8
0 . 9
1
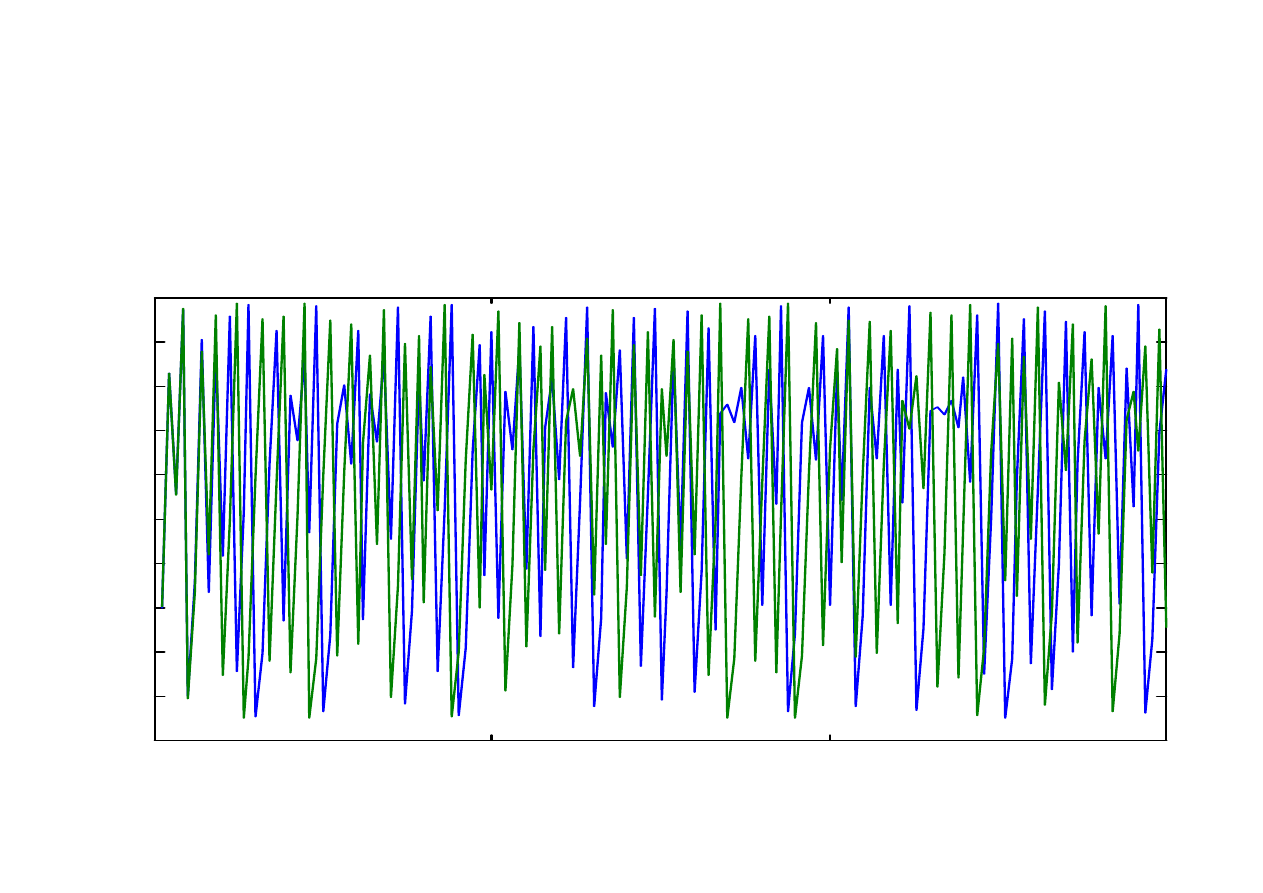
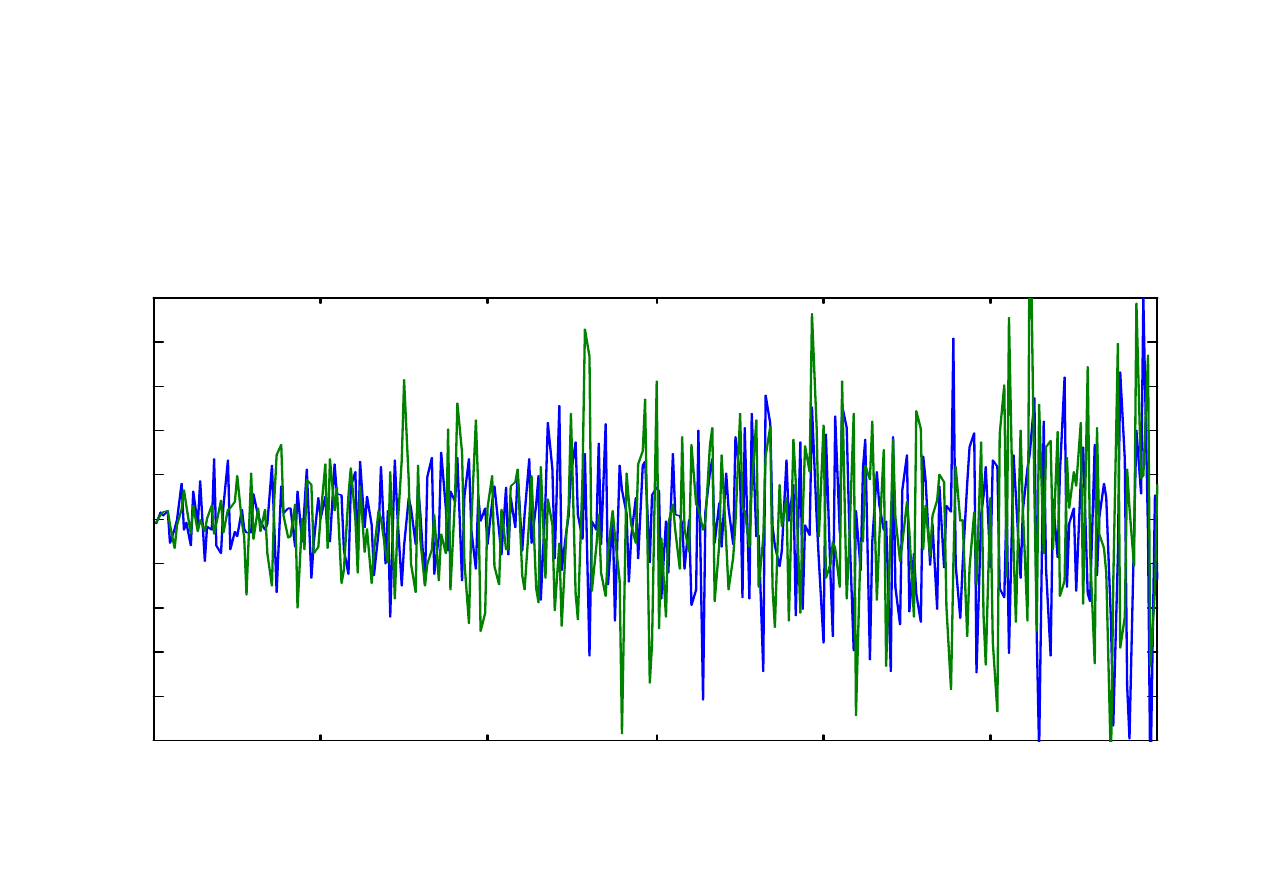
Drgania generowane dla warunków początkowych
x(1) = 0,300 (niebieska linia)
oraz x(1) = 0,301 (zielona linia)
Parametr r = 3,95
0
5 0
1 0 0
1 5 0
0
0 . 1
0 . 2
0 . 3
0 . 4
0 . 5
0 . 6
0 . 7
0 . 8
0 . 9
1
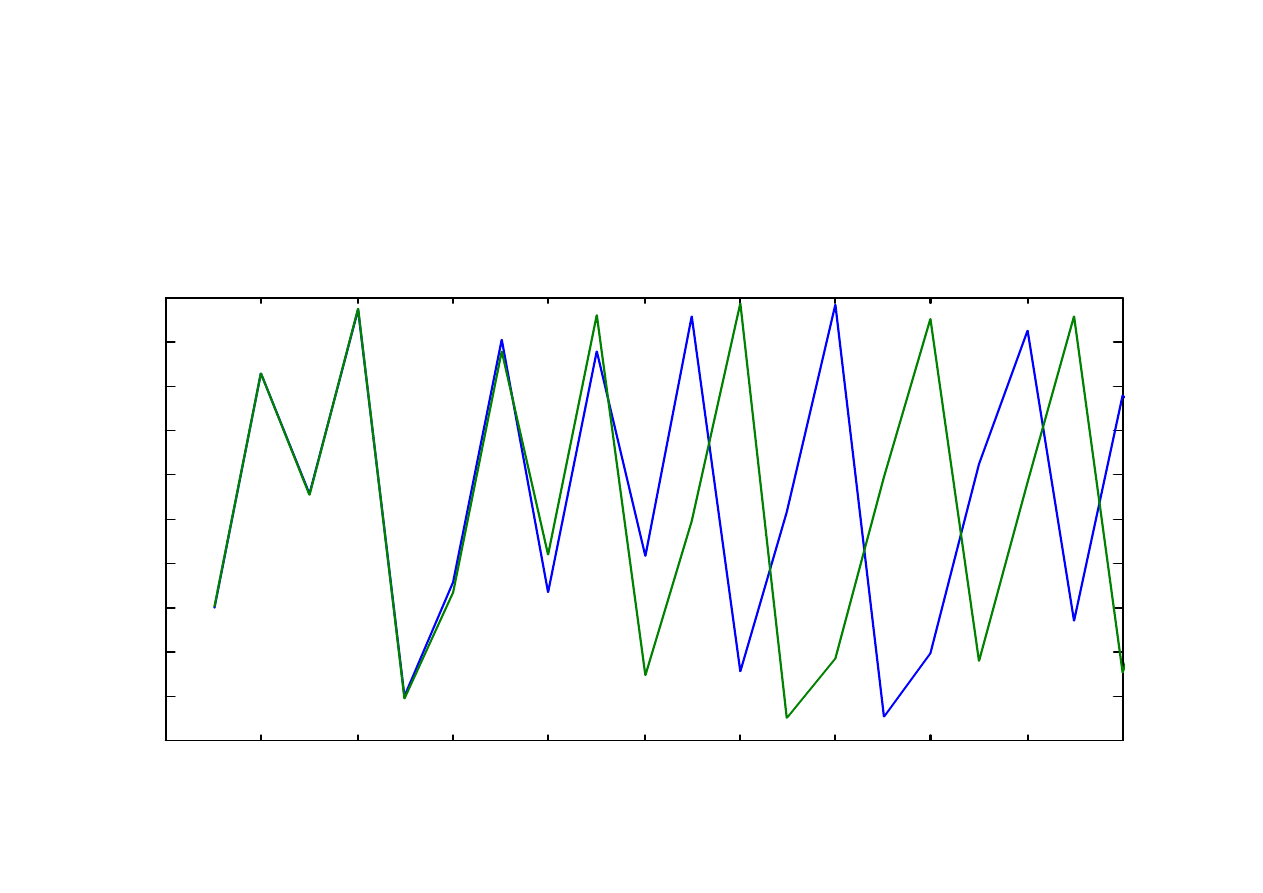
Drgania generowane dla warunków początkowych
x(1) = 0,300 (niebieska linia)
oraz x(1) = 0,301 (zielona linia);
Parametr r = 3,95; Przedział czasu <1,20>
0
2
4
6
8
1 0
1 2
1 4
1 6
1 8
2 0
0
0 . 1
0 . 2
0 . 3
0 . 4
0 . 5
0 . 6
0 . 7
0 . 8
0 . 9
1
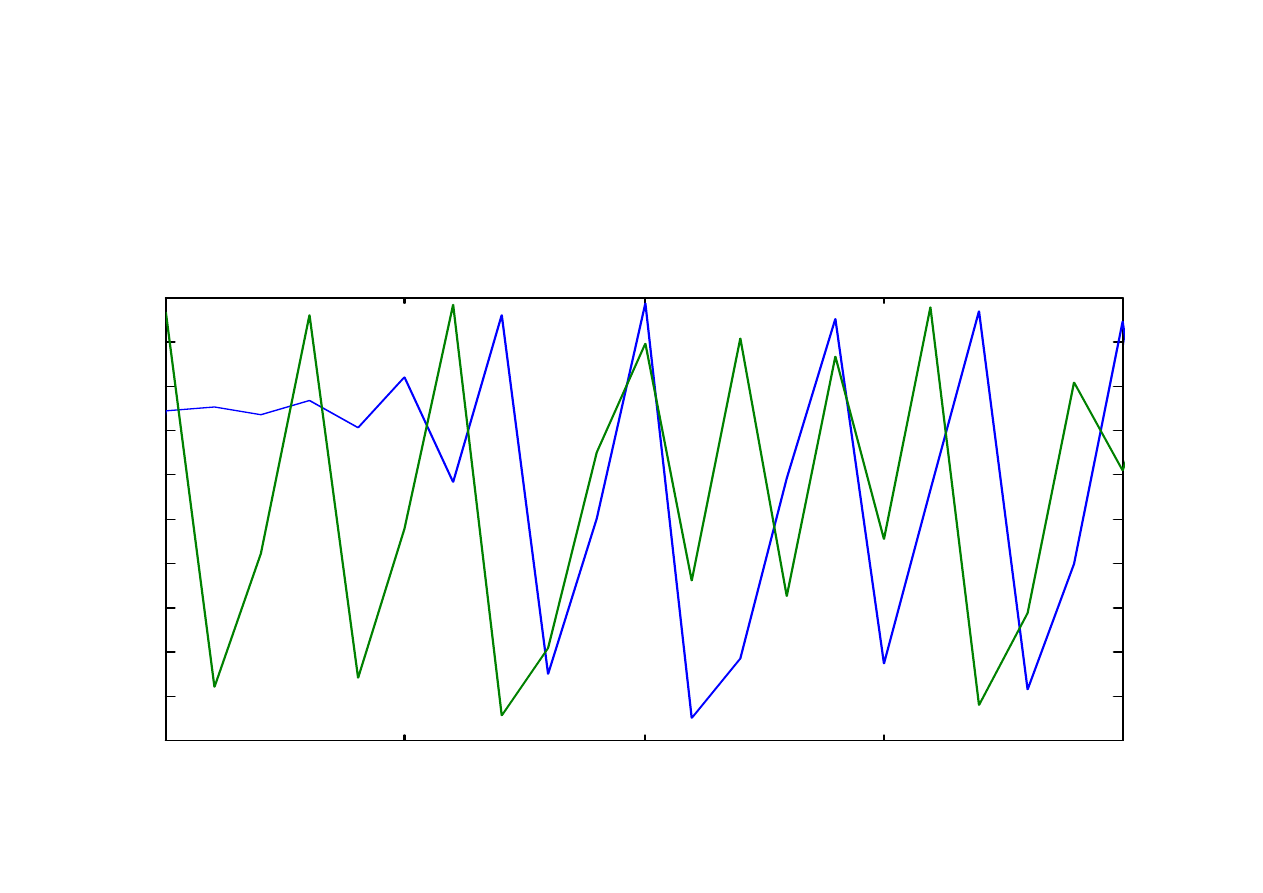
Drgania generowane dla warunków początkowych
x(1) = 0,300 (niebieska linia)
oraz x(1) = 0,301 (zielona linia);
Parametr r = 3,95; Przedział czasu <115,135>
1 1 5
1 2 0
1 25
1 30
1 3 5
0
0 .1
0 .2
0 .3
0 .4
0 .5
0 .6
0 .7
0 .8
0 .9
1
1 1 5
1 2 0
1 2 5
1 3 0
1 3 5
0
0 . 1
0 . 2
0 . 3
0 . 4
0 . 5
0 . 6
0 . 7
0 . 8
0 . 9
1
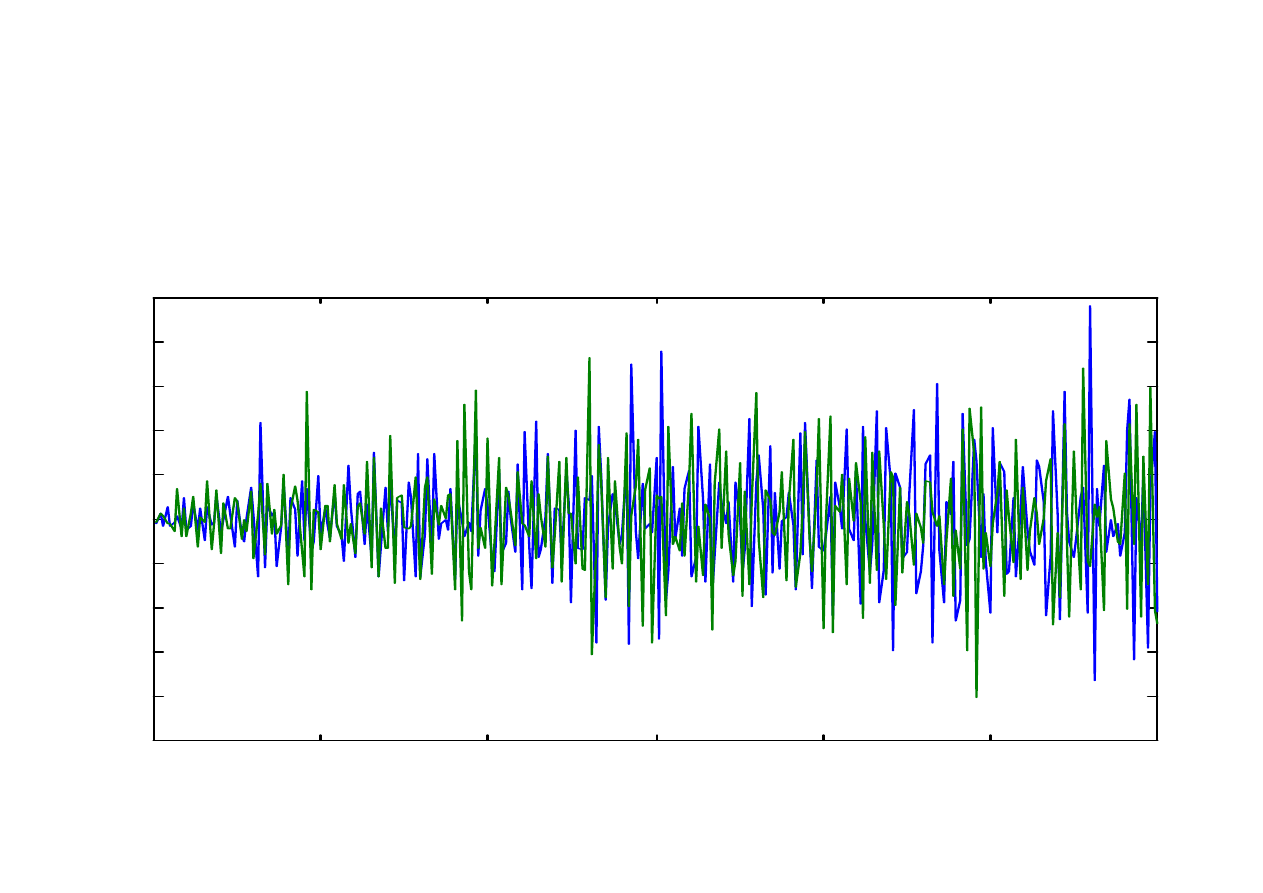
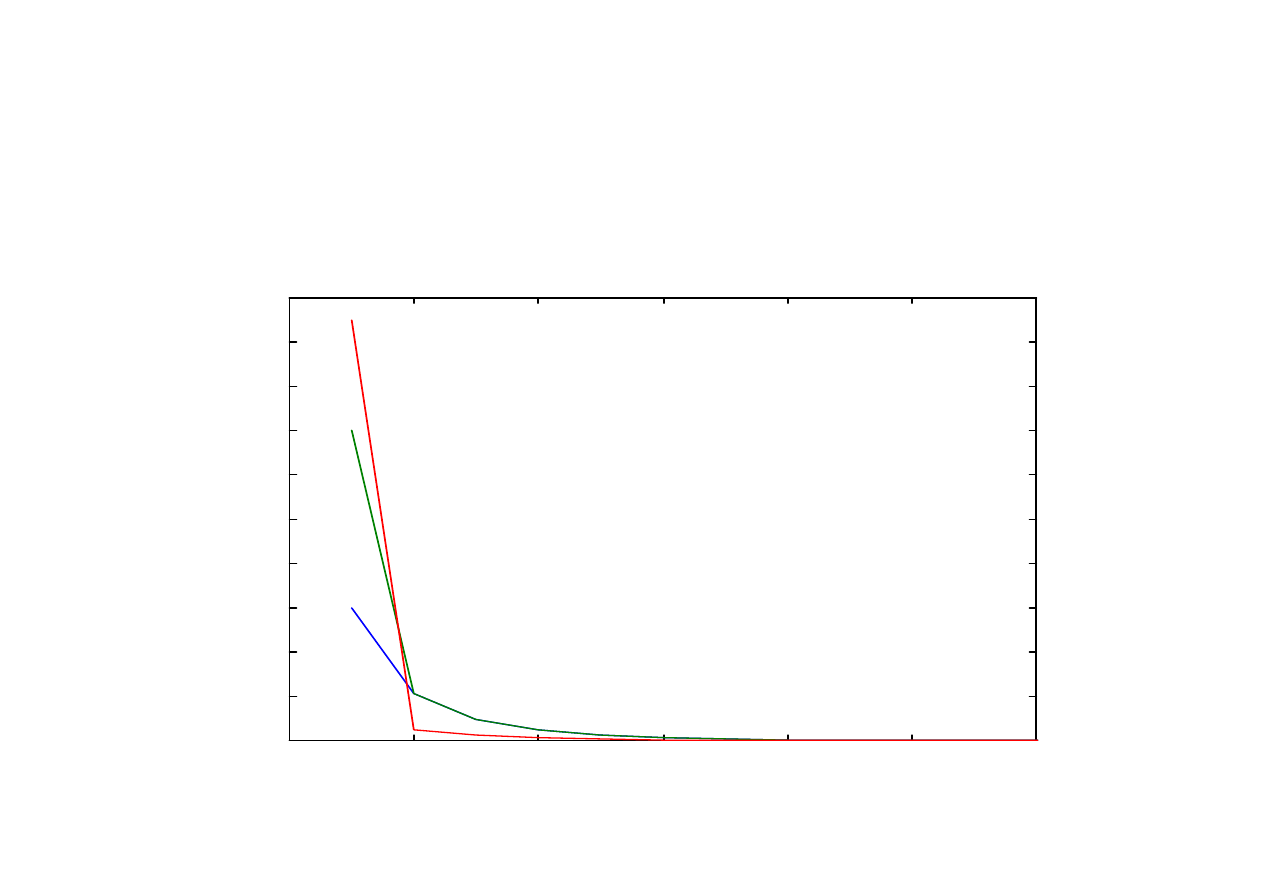
Autokowariancja drgań generowanych dla
warunków początkowych x(1) = 0,300 (niebieska
linia) oraz dla x(1)=0,301 (zielona linia);
Parametr r = 3,95
0
5 0
1 0 0
1 5 0
2 0 0
2 5 0
3 0 0
- 5
- 4
- 3
- 2
- 1
0
1
2
3
4
5
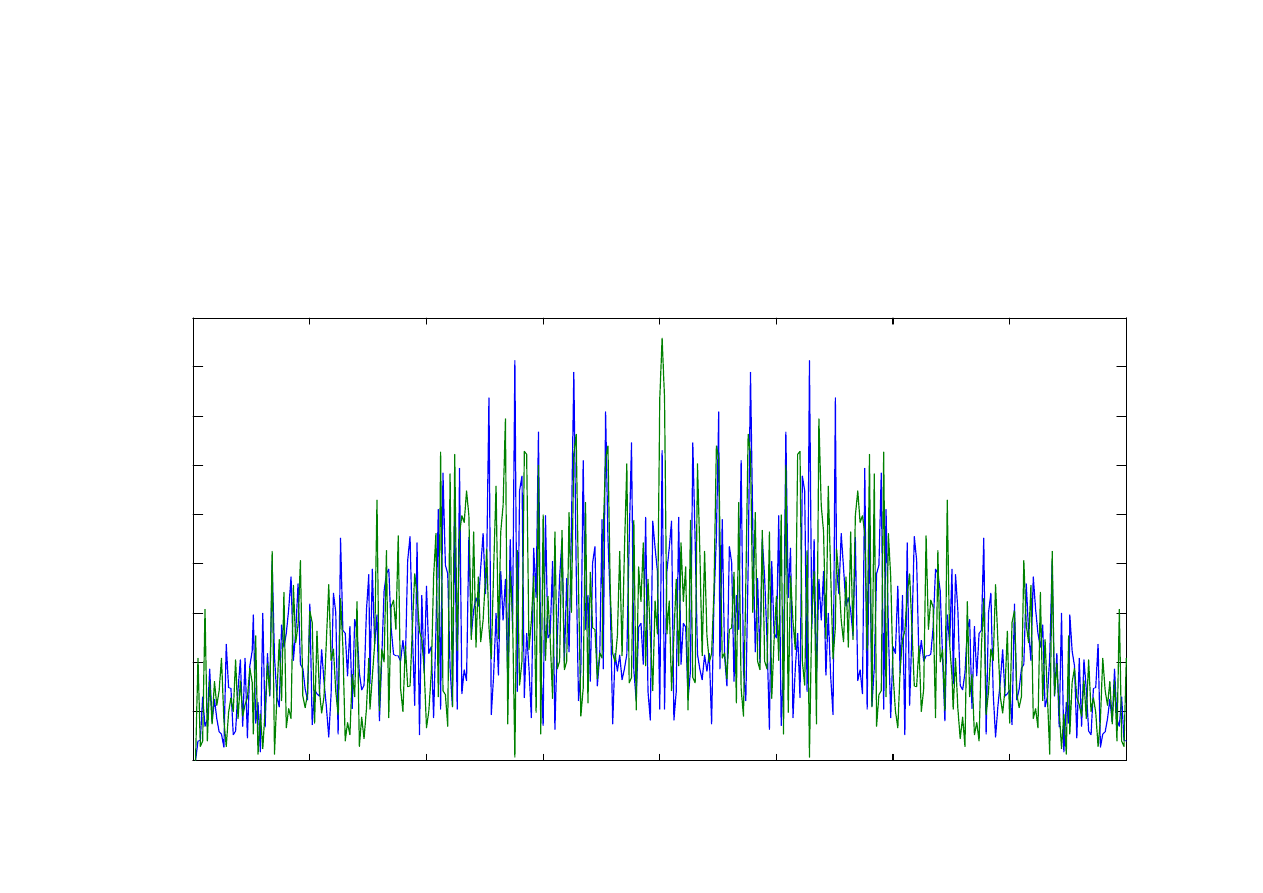
Widmo (DFT) drgań generowanych dla warunków
początkowych x(1) = 0,300 (niebieska linia) oraz dla
x(1)=0,301 (zielona linia); Parametr r = 3,95
Widmo wyznaczono dla sygnałów bez składowej stałej.
0
5 0
1 0 0
1 5 0
2 0 0
2 5 0
3 0 0
3 5 0
4 0 0
0
2
4
6
8
1 0
1 2
1 4
1 6
1 8
Odwzorowanie F
4
dla odwzorowania logistycznego
x(n+1) = F[x(n)] dla r = 4,00
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Autokowariancja drgań generowanych dla
warunków początkowych x(1) = 0,300 (niebieska
linia) oraz dla x(1)=0,301 (zielona linia);
Parametr r = 4,00
0
5 0
1 0 0
1 5 0
2 0 0
2 5 0
3 0 0
- 5
- 4
- 3
- 2
- 1
0
1
2
3
4
5
Wyszukiwarka
Podobne podstrony:
chaos deterministyczny i fraktale biofizyka
Chaos Deterministyczny p3
Rajeev S G Advanced Mechanics From Eulers Determinism to Arnolds Chaos (OUP, 2013)(ISBN 978019967085
Determinanty dochodu narodowego
Determinanty dn
L 5 Determinants
Positron emission tomography slides
Chaos+Poincare
Hine P Knack and Back Chaos
p19 109
p19 057
determinanty demoralizacji nieletnich
P19 005
p19 046
p19 095
więcej podobnych podstron