Lecture
5
THE RANK
DETERMINANTS AND THE INVERSE MATRIX

1. THE RANK OF A MATRIX
Definition
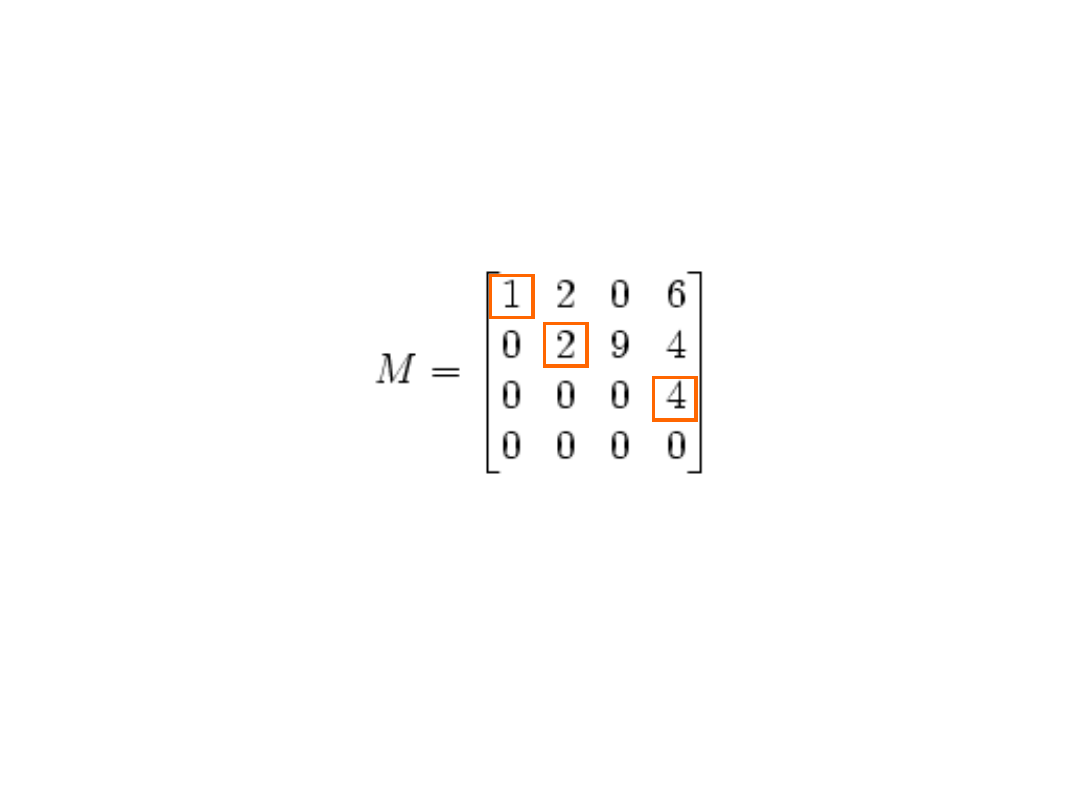
The leading coefficient of a row in a matrix is the first nonzero
entry in that row. So, for example,
The numbers 1, 2, 4 are the leading coefficints.
Definition
A matrix is in row echelon form if is satisfies the following
requirements:
1. All nonzero rows are above any rows of all zeroes.
2. The leading coefficient of a row is always to the right of the
leading coefficient of the row above it.
3. All entries below a leading coefficient, if any, are zeroes.
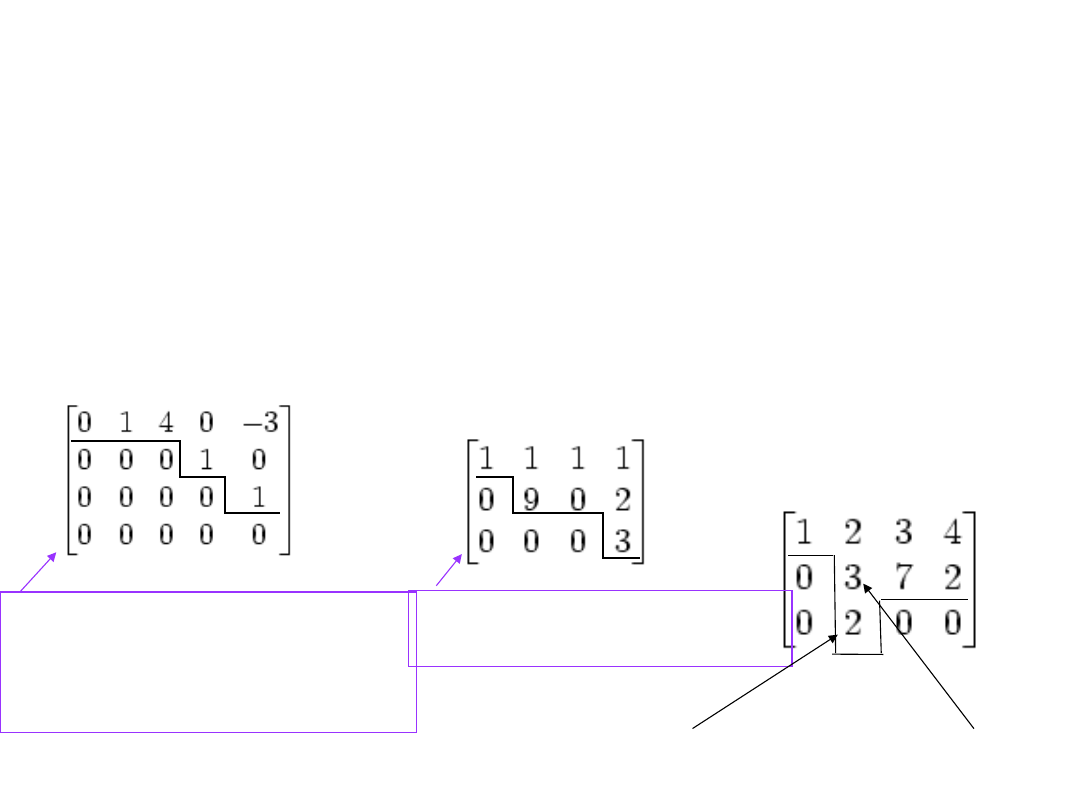
This matrix is in row echelon
form.
It has three leading
elements
As is this one. It also has
three leading elemnts
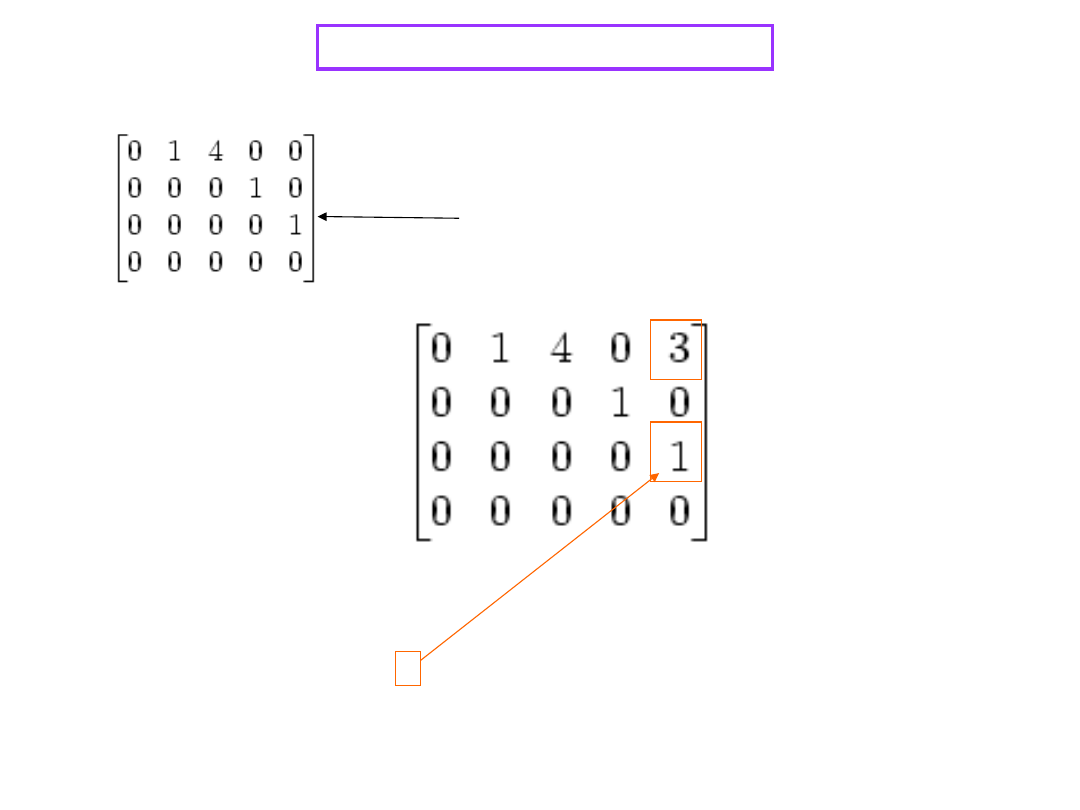
However, this matrix is not in row echelon form,
as it has nonzero entries below the leading
coefficient of the second row.
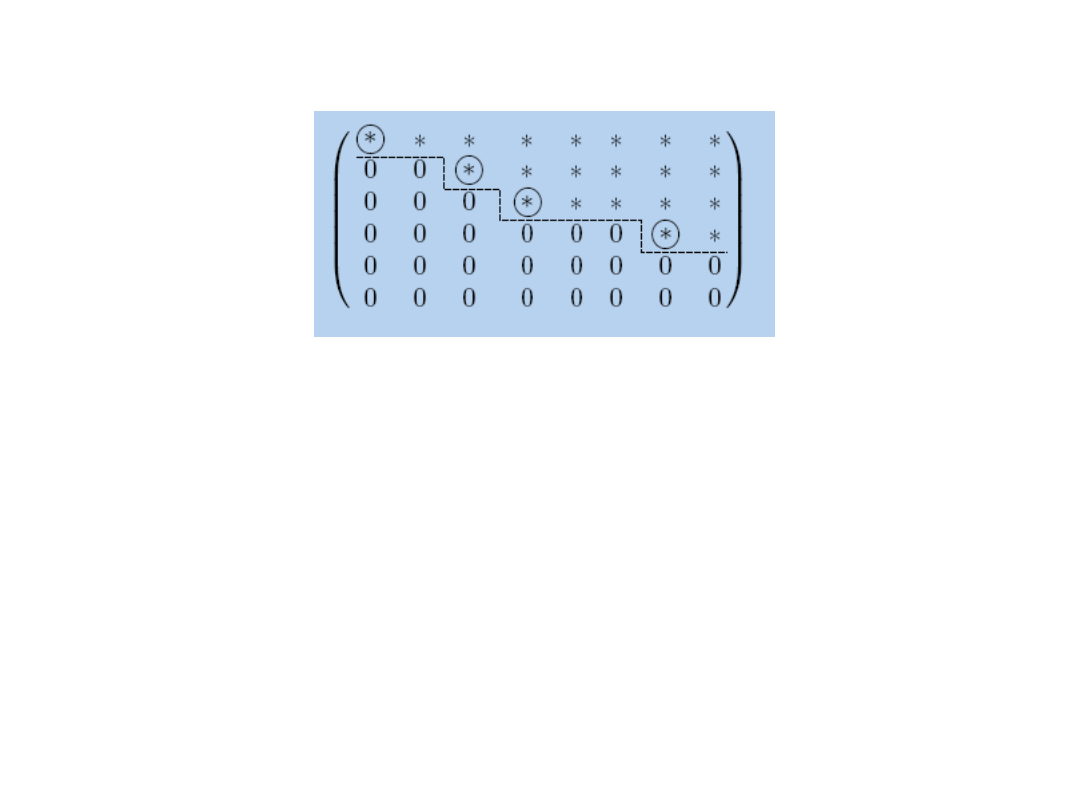
Typical structure in row echelon form
This matrix is in reduced row echelon form:
It has three leading elements
However, the obove matrix is not in reduced row
echelon form, as the 1 in the third row is not
the only nonzero entry in its column:
REDUCED ROW ECHELON FORM
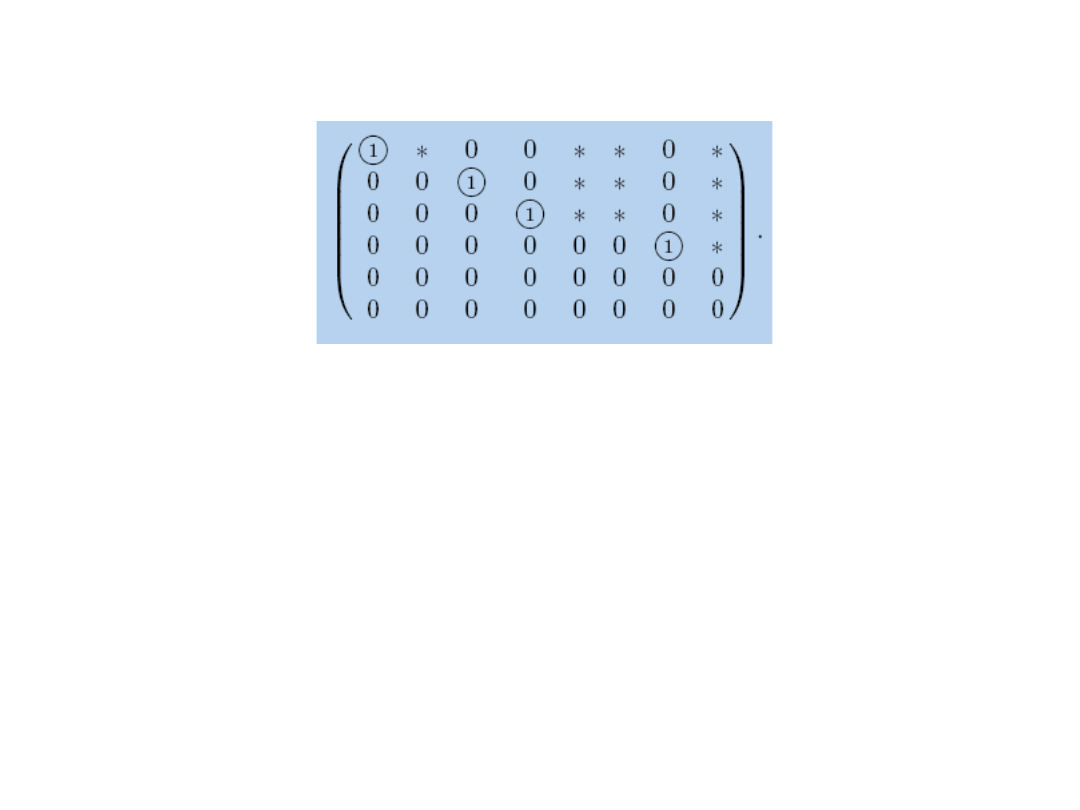
Typical structure in reduced row echelon form
A matrix is in reduced row echelon form (also known as row
canonical form) if it satisfies the following requirements:
1. All nonzero rows are above any rows of all zeroes.
2. The leading coefficient of a row is always to the right of the leading
coefficient of the row above it.
3. All entries below a leading coefficient, if any, are zeroes.
4. All leading coefficients are 1.
5. All leading coefficients are the only nonzero entries in a given column
(equivalently: all leading coefficients have zeros both above and
below them).
Every matrix can be transformed by elementary row operations into
an infinite number of echelon forms (they can all be multiples of each
other).
However, all matrices and their row echelon forms correspond to exactly
one matrix in
reduced row echelon form.
The
first three requirements
above are precisely those that determine a
matrix in row echelon form
RANK OF A MATRIX
Suppose that A
m x n
is reduced by row operations to an echelon form E.
The rank of A is defined to be the number;
rank(A) = number of leading elements
= number of nonzero rows in E
= number of basic columns in A.
Definition
The basic columns of A are defined to be those columns in A that contain
the positions of the leading elements.,
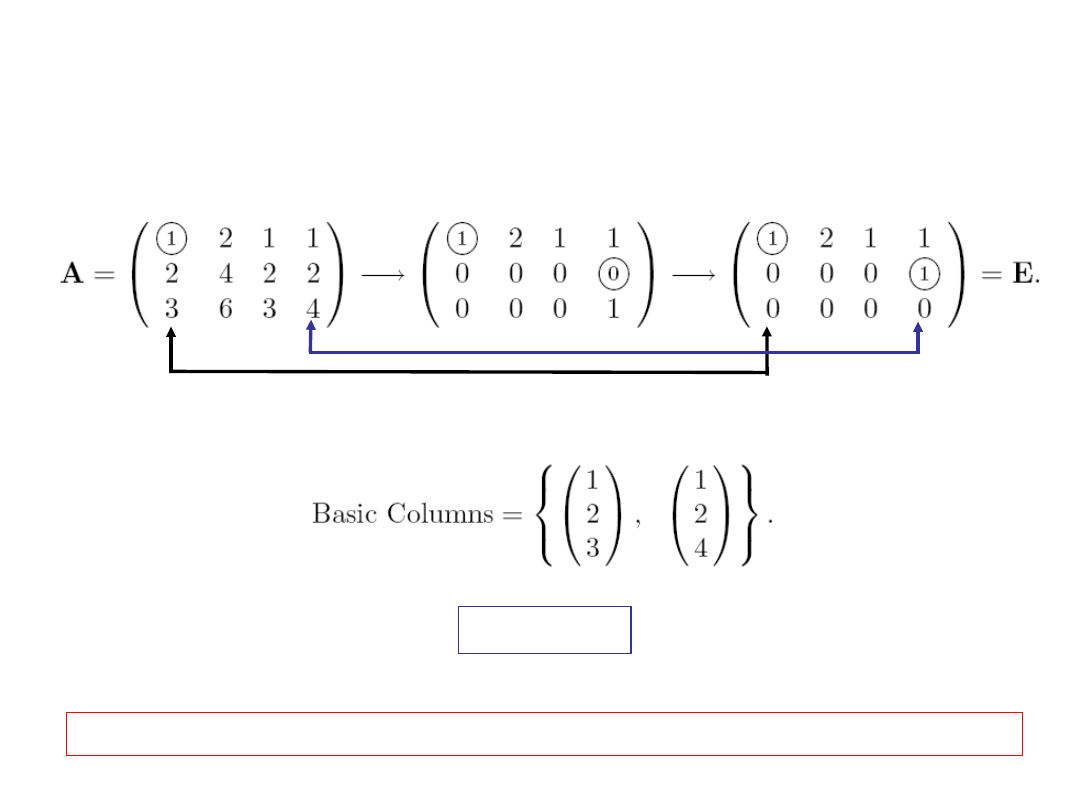
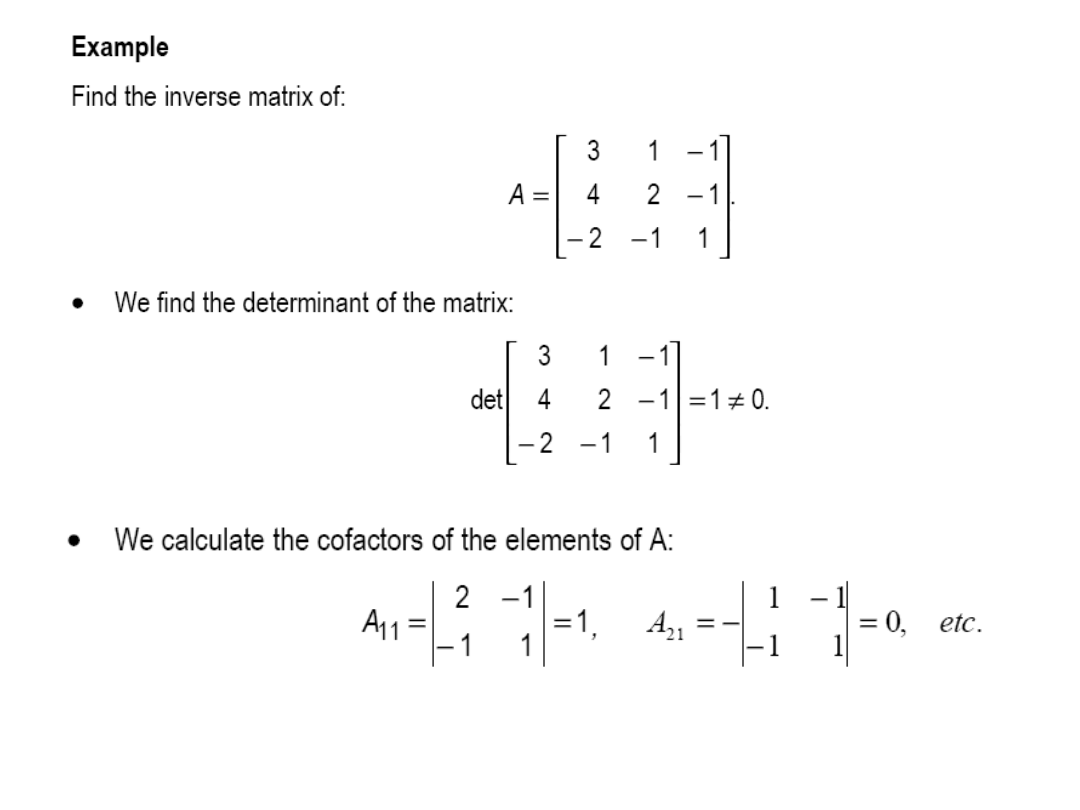
Example
We reduce the marix to row echelon form:
There are two leading lements, so rank(A) = 2, and
Note that the basic columns are extarcted from A not from E.
rank A =2
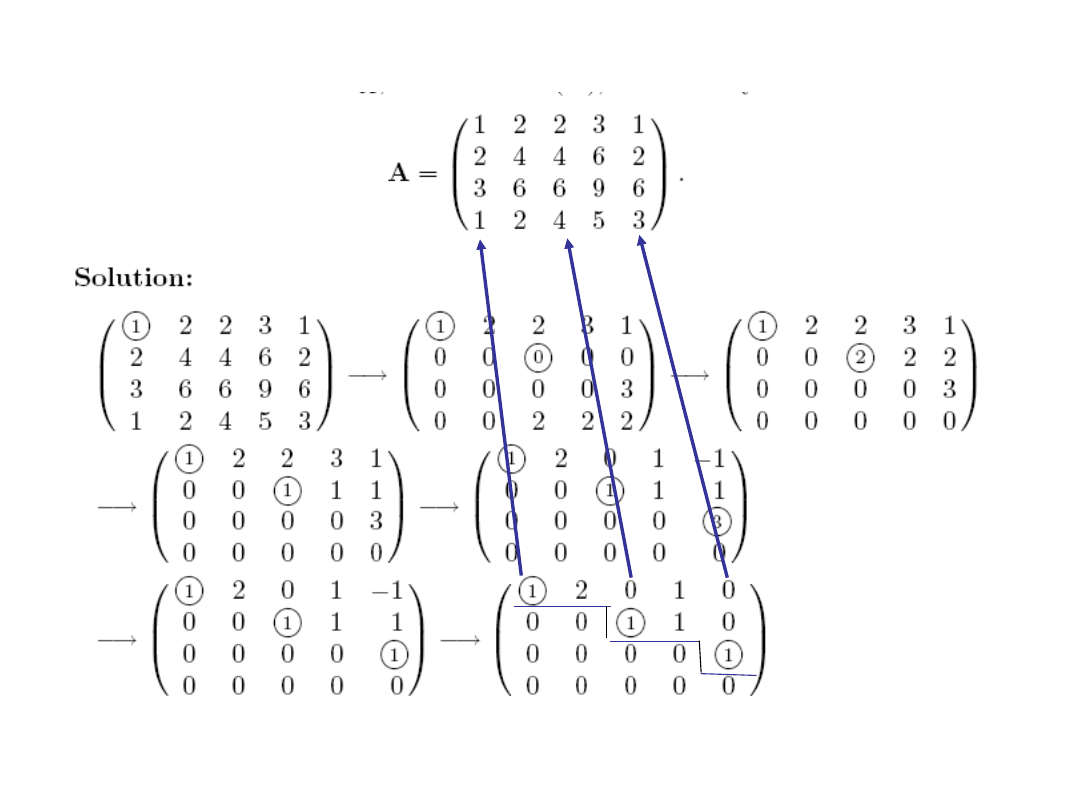
Find the rank and the basic columns of
The rank(A)=3, the basic columns are (1,2,3,1)
T
, (2,4,6,4)
T
, (1,2,6,3)
T
.
.
Example

DETERMINANT
THE ORIGIN OF THE DETERMINANT
B
dy
cx
A
by
ax
d
/
B
dy
cx
c
/
A
by
ax
1
2
R
R
aB
ady
acx
cA
bcy
acx
cA
aB
y
)
bc
ad
(
cA
bcy
acx
bc
ad
cA
aB
y
bc
ad
Bb
Ad
x
DETERMINANT
Definition
The determinant of a 2 by 2 matrix
A
is equal to
bc
ad
d
c
b
a
Det
A
Det
Notation
Det A, det A,
d
c
b
a
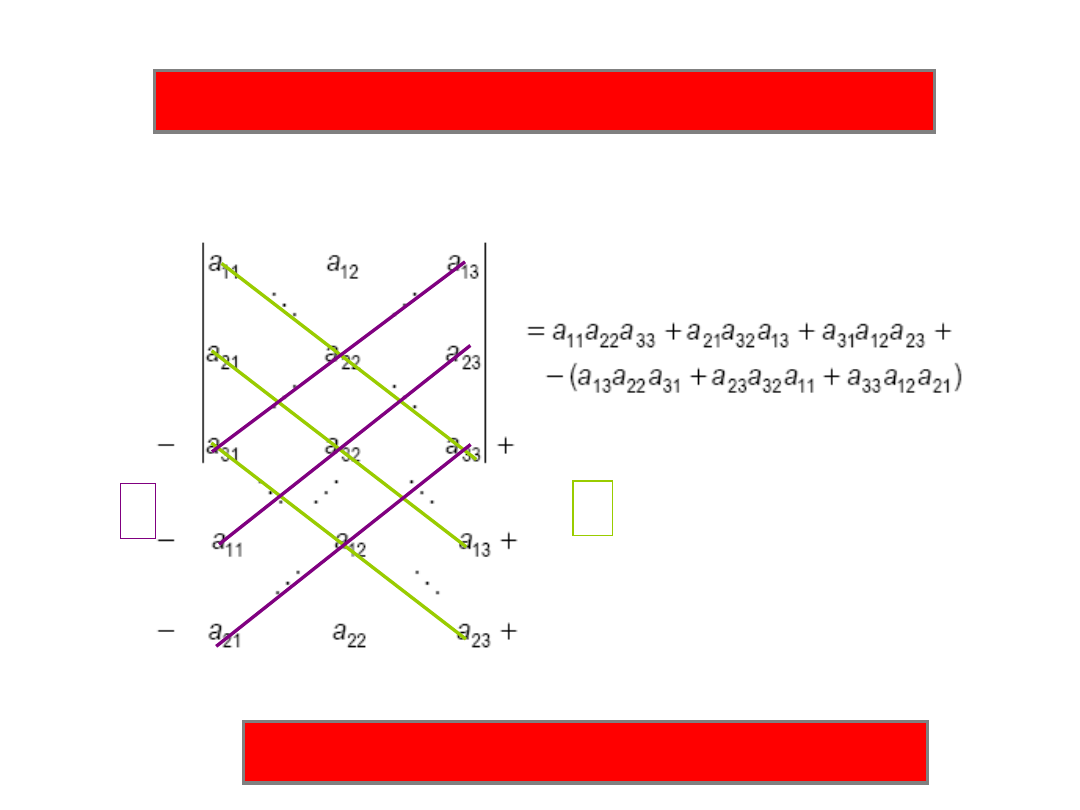
The Sarrus Method for 33 matrices
+
-
it works ONLY for 33 matrices
DEFINITION OF DETERMINANT - expansion along the first row
1
1
1
1
1
1
1
1
1
2
21
21
1
1
1
12
11
n
n
n
n
n
n
nn
n
n
n
n
a
a
a
a
a
a
a
a
a
a
a
a
a
,
,
,
,
,
,
A =
1
1
1
1
1
1
1
1
2
21
21
1
1
1
12
11
n
n
n
n
nn
n
n
n
n
a
a
a
a
a
a
a
a
a
a
a
a
,
,
,
,
,
•
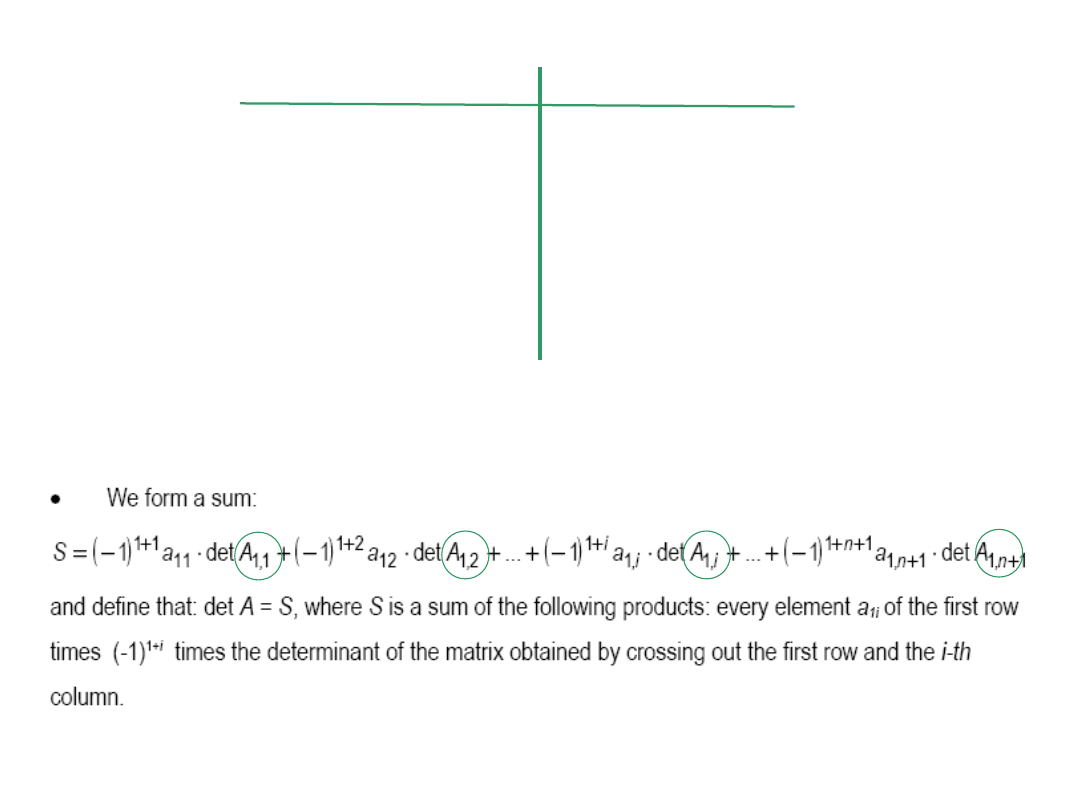
We cross out the first row and the i-th column. In
this way we obtain a matrix n by n and name it
A
1,i
1.
2.
3.
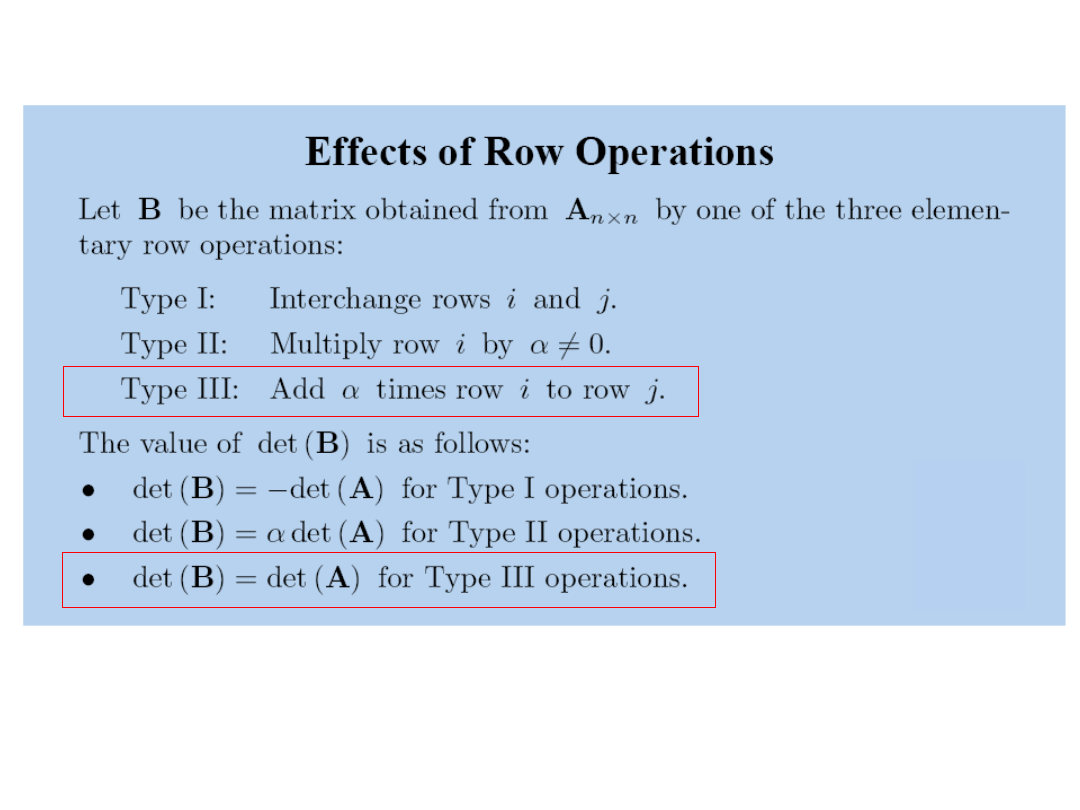
Type I Elementary Row Operation
The determinant of a matrix in which every element of a row (column) is zero
is also zero.
The determinant of a matrix with two identical rows (columns) is zero
Some properties of determinants
The determinant of a square matrix is equal to the determinant of its transpose
Det A = Det A
T
Property 2.
4.
5
.
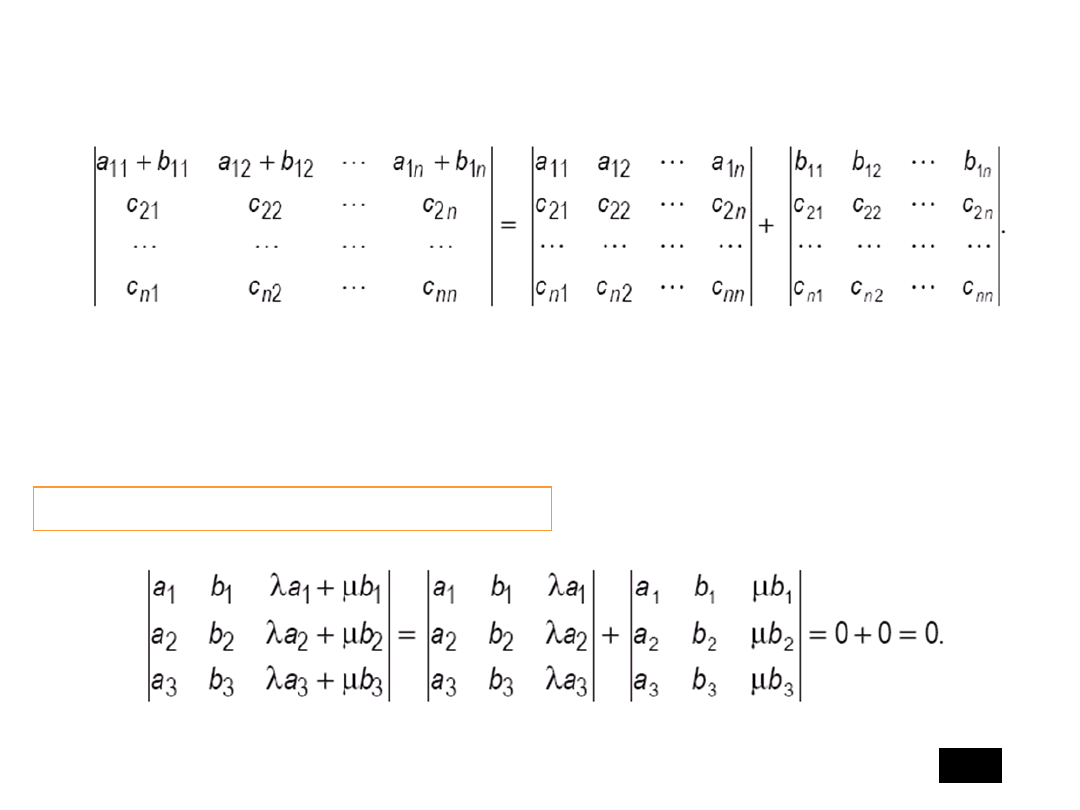
The determinant of a matrix in which one of the rows (columns) is a
linear combinationof the others is equal to zero.
The determinant of a matrix which has the elements of one row (column)
equal to the sum of two determinants is equal to the sum of two determinants
of matrices with the elemnets of appropriate rows replaced by the components
of the sum.
Type III Elementary Row Operation
OTHER METHODS OF CALCULATING THE DETERMINANT
1. We can reduce the matrix using type III Elementary Row Operations,
and then calculate the determinant.
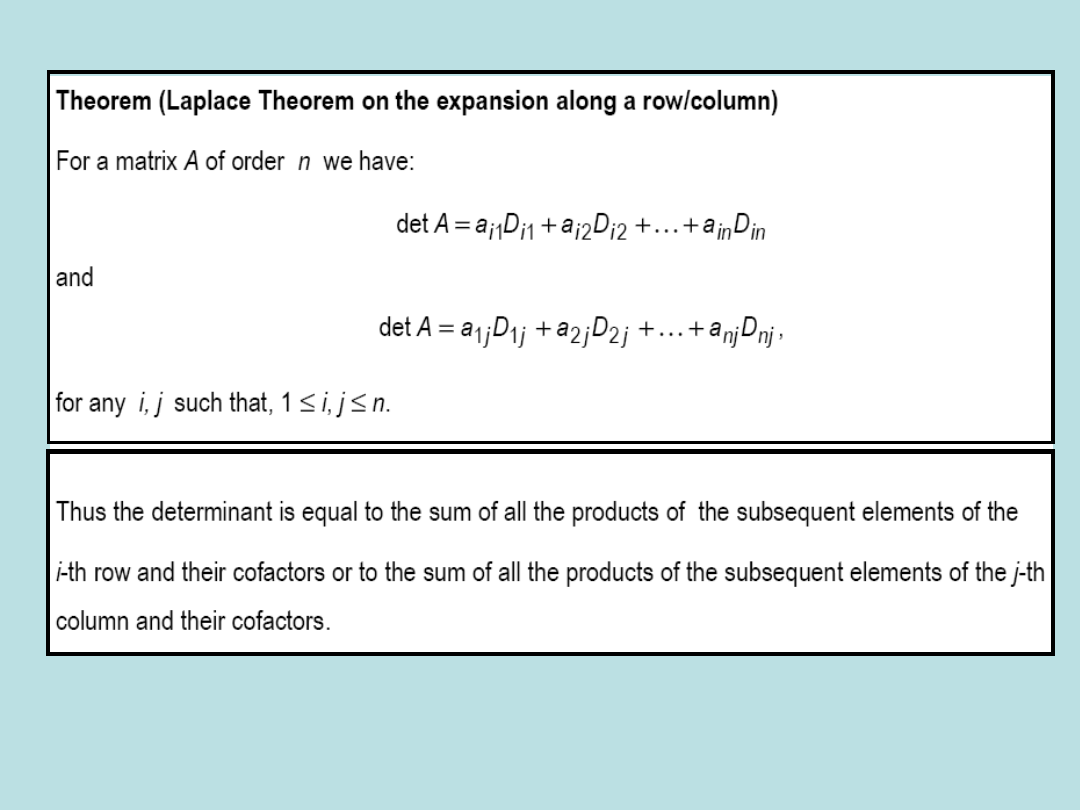
2. We can expand the determinant along another row or column.
To explain the second method we need more definitions...

Some definitions
Definition
A kk minor determinant of A is the determinant of a k k square submatrix of A
1
2
3
3
9
5
1
3
4
4
0
2
7
2
3
1
e.g. a minor of A is
20
21
1
1
3
7
1
det
Definition
A submatrix of A is formed by removing whole columns or rows from
the original matrix.
1
2
0
2
5
4
3
2
1
A
The cofactor :
1
1
0
3
1
1
2
2
22
det
)
(
D
Especially important are the (n - 1) × (n - 1) minors of an n × n
ij
, and are derived by removing the i-
th row and the j-th column.
Definition
The cofactor
D
ij
of A is defined as
(−1)
i + j
times the minor
M
ij
of
A
.
D
ij
= (−1)
i + j
M
ij
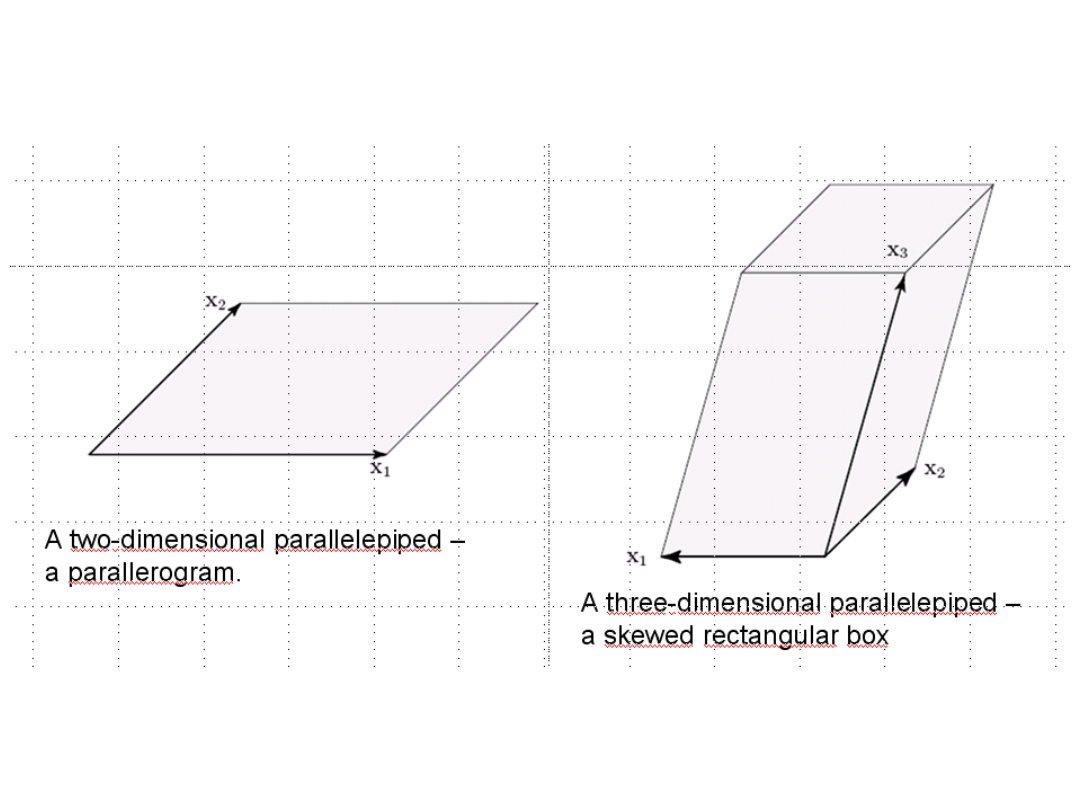
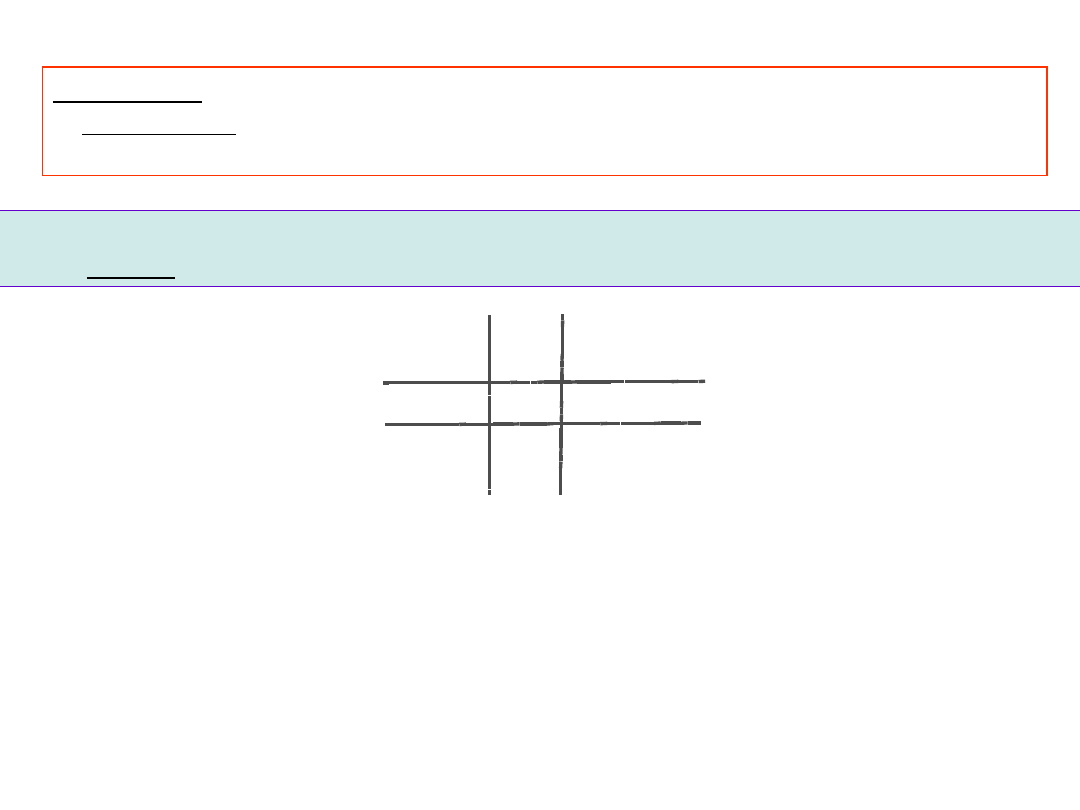
GEOMETRICAL INTERPRETATION
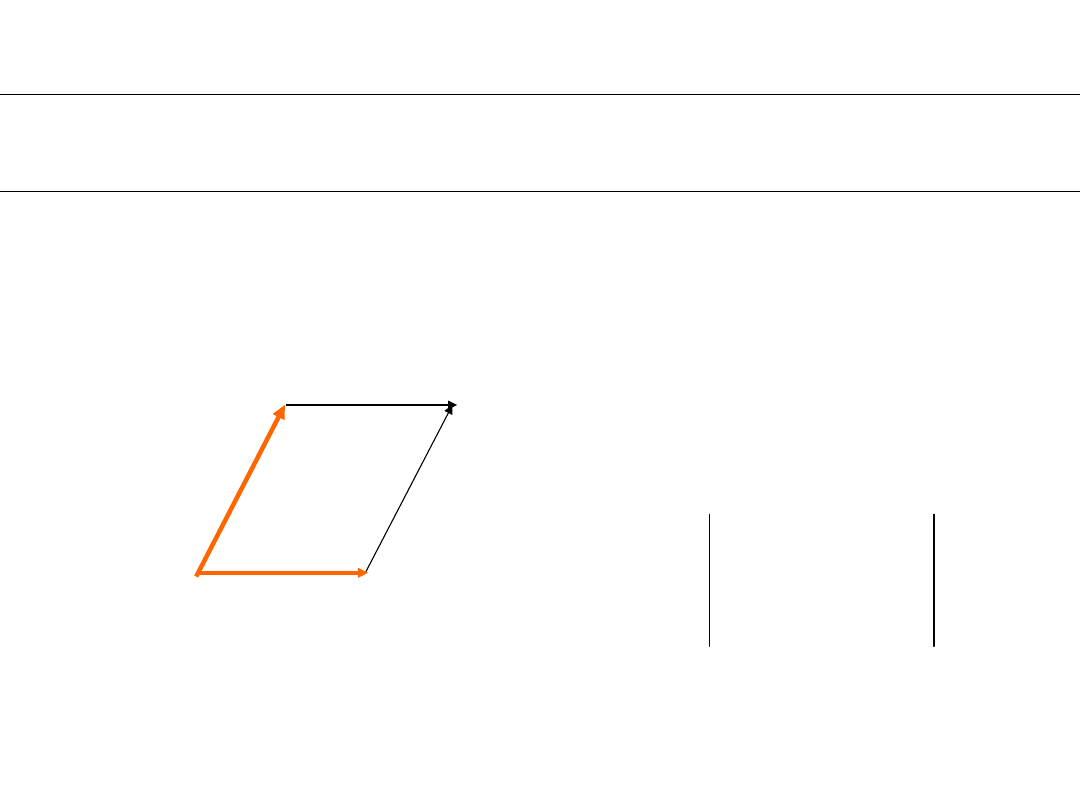
Example
The area (2-dim volume) of a parallelogram described by vectors [2,0]
and [1,2] is
4
2
0
1
2
det
AREA
Vector [2,0]
vector[1,2]
The volume V of a parallelepiped generated by the columns of a matrix A is
V= [det (A A
T
)]
1/2
.
In particular, if A is square, then V = | det A | .
THEOREM (ON THE DETERMINANT OF A PRODUCT OF TWO MATRICES).
Let A and B be square matrices of the same order, then:
det ( A B) = det A det B.

THE INVERSE OF A MATRIX

DEFINITION
A matrix A is called non-singular iff
Det A 0
If an inverse exists then we can 'cancel' matrix terms:
A·B = A·C
A
-1
·/
A·B = A·C
A
-1
·A ·B = A
-
1
·A·C
(A
-1
·A) ·B =(A
-1
·A)
·C
I·B = I·C
B =C
We multiply from the
R-HS
INVERSE OF MATRIX
Definition
The inverse matrix of a square matrix
A
is a matrix denoted by
A
-1
,
such that:
A
-1
A = A A
-1
= 1
B · A = C · A
B · A = C · A
/
·
A
-1
B · A · A
-1
= C · A · A
-1
B ·(A
-1
·A) = C ·(A
-1
·A)
B · I = C · I
B = C
Or
We multiply from the L-HS
THEOREM
1) An invertible matrix
A
( one for which an inverse matrix
exists) is nonsingular, that is
Det
A
0.
2) The inverse matrix
A
-1
of a non-singular matrix is non-singular
(A
-1
)
-1
= A
3) The determinant of the inverse matrix
A
-1
is equal to the
reciprocal of the determinant of matrix
A
:
DetA
1
A
Det
1
Det (AB) = DetA DetB
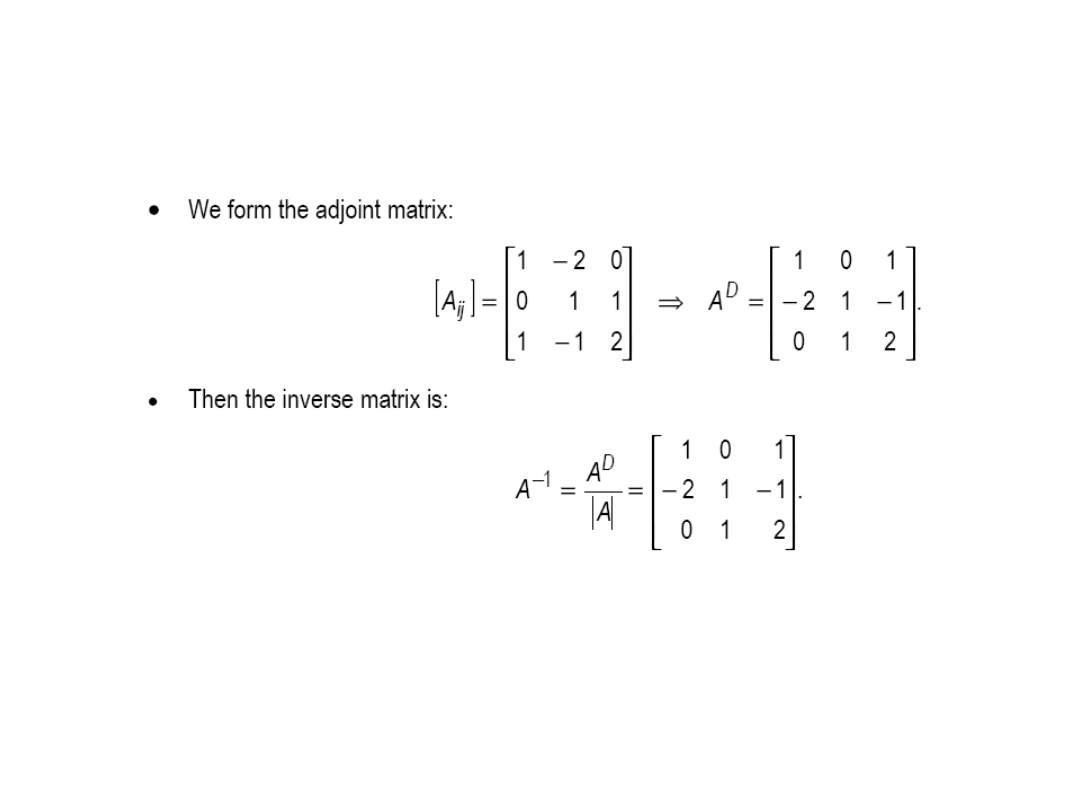
Theorem
The inverse matrix can be found from the
formula
.
A
A
A
D
1
Definition
If you replace each element of a square matrix A with its own
cofactor and transpose the result, then you have made the adjoint
matrix (new term adjugate) of A.
T
ij
D
D
A
To prove the formula
.
A
A
A
D
1
We will first prove the following cofactors property, for 3x3 matrices,
The method of the proof is universal.
Cofactors property
Theorem : When we multiply the elements of a row of a square matrix with the
corresponding cofactors of another row, then the sum of these product is 0.
Proof:
Take
Let
A, B, C, D, E, F, G, H, I
be the cofactors of
a, b, c, d, e, f, g, h, i
.
We multiply the elements of a row, say the second, with the corresponding
cofactors of another row, say the the first.
We have to prove that
dA + eB + fC = 0
.
Take now the matrix
Since the matrix has two equal rows, its determinant is
0
. So
Det(Q) = 0
.
Furthermore, the cofactors of corresponding elements of the first row of
P
and
Q
are the same. These cofactors are
A, B
and
C
.
Hence the calculation of
Det(Q)
emanating from the first row gives
dA+eB+fC
.
Since we know that
det(Q) = 0, dA+eB+fC =
0
.
Q.E.D.
i
h
g
f
e
d
c
b
a
P
i
h
g
f
e
d
f
e
d
Q
Now we shall prove the formula
for a 3 x 3 matrix,
the method of the proof for is universal.
.
P
P
P
D
1
The diagonal elements of this matrix are
Det P
iI
hH
gG
iF
hE
gD
iC
hB
gA
fI
eH
dG
fF
eE
dD
Cf
eB
dA
cI
bH
aG
cF
bE
aD
cC
Bb
aA
I
F
C
H
E
B
G
D
A
i
h
g
f
e
d
c
b
a
First we calculate the product P times (adjoint P)
P P
D
=
iI
hH
gG
0
0
0
fF
eE
dD
0
0
0
cC
Bb
aA
Because of the cofactors property,
I
P
Det
1
0
0
0
1
0
0
0
1
P
Det
P
Det
0
0
0
P
Det
0
0
0
P
Det
In the same way ,
P
D
P = Det P I
So
I
P
DetP
P
and
I
DetP
P
P
D
D
thu
s
P
Det
p
P
D
1
QED
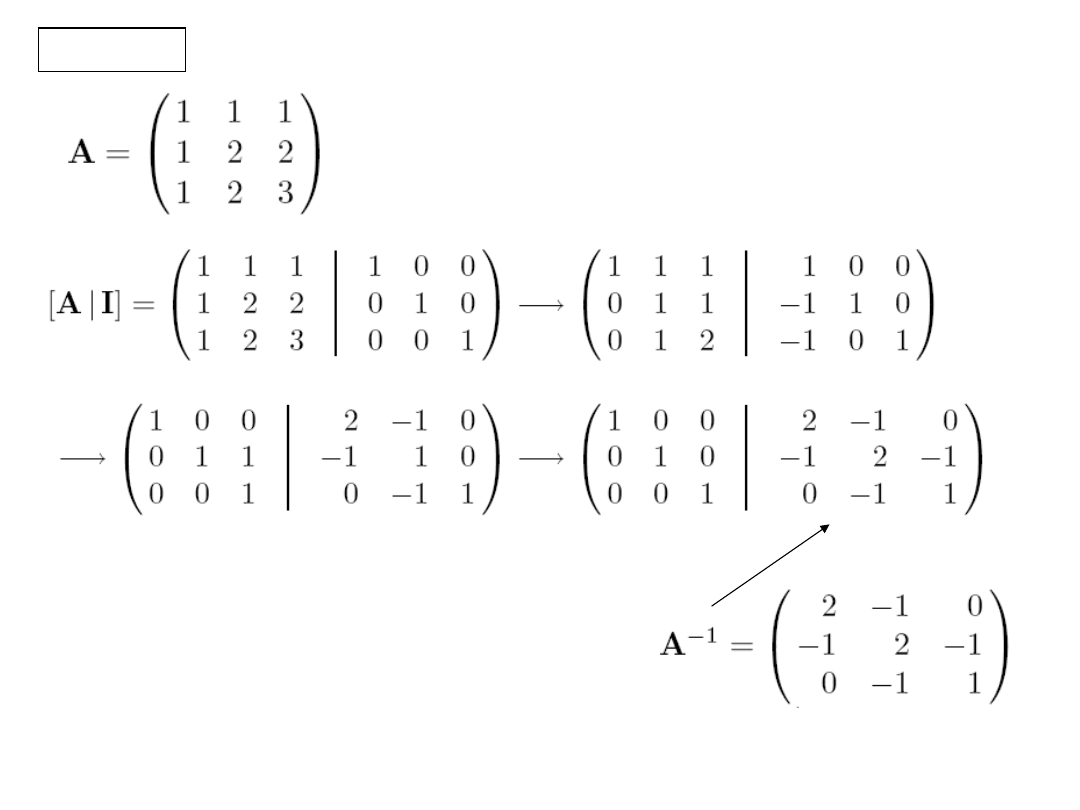
Use elementary row operations on the augmented matrix [
A | I
],
as in the Gaussian Elimination Method, to reduce
A
to the unit matrix
I
, then
transform the unit matrix to
A
-1
that is
[
A | I
] is reduced to [
I | A
-1
].
Justification
1
1
A
I
A
x
I
I
x
A
Another method to find the inverse
matrix
EXAMPLE
Let A and B be two nonsingular matrices then,
1
T
T
1
1
1
1
A
A
.
3
)
inversion
for
law
order
reverse
the
(
A
B
AB
.
2
r
nonsingula
also
is
AB
product
The
.
1
If
0
A
Det
then the inverse matrix A
-1
exists.
.
A
Det
A
A
D
1
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
Wyszukiwarka
Podobne podstrony:
Determinanty dochodu narodowego
Determinanty dn
determinanty demoralizacji nieletnich
Determinanty, Ekonomia, ekonomia
Procesy grupowe, Kulturoznawstwo UAM, Psychologiczne determinanty komunikacji kulturowej
determinacja i róznicowanie płci
kryminologia determinanty, Studia PO i PR
Determinanty Dochodu Narodowego, Materiały do nauki
Determinanty wychowania X
chaos deterministyczny i fraktale biofizyka
determinizm technologiczny[1], MARKETING INTERNETOWY
testy z mikro sciaga, Cena relatywan czynników produkcji determinuje pochylenie:
Determinizm
Determinanty dochodu narodowego
determinizm
CZYNNIKI DETERMINUJĄCE POZIOM SPORTOWY TENISIE, Tenis ziemny
więcej podobnych podstron