Teoria sygnałów i systemów
Egzamin – część teoretyczna
03 lutego 2015 r.
1. (EW1, waga 1.5) Proszę podać rodzaje reprezentacji modeli systemów w dziedzinie
czasu i częstotliwości. Proszę podać, w jaki sposób można przekształcić postać mo-
delu z dziedziny czasu do częstotliwości. Proszę podać przykład modelu systemu
zapisanego w dziedzinie czasu, oraz reprezentację tego samego modelu w dziedzinie
częstotliwości.
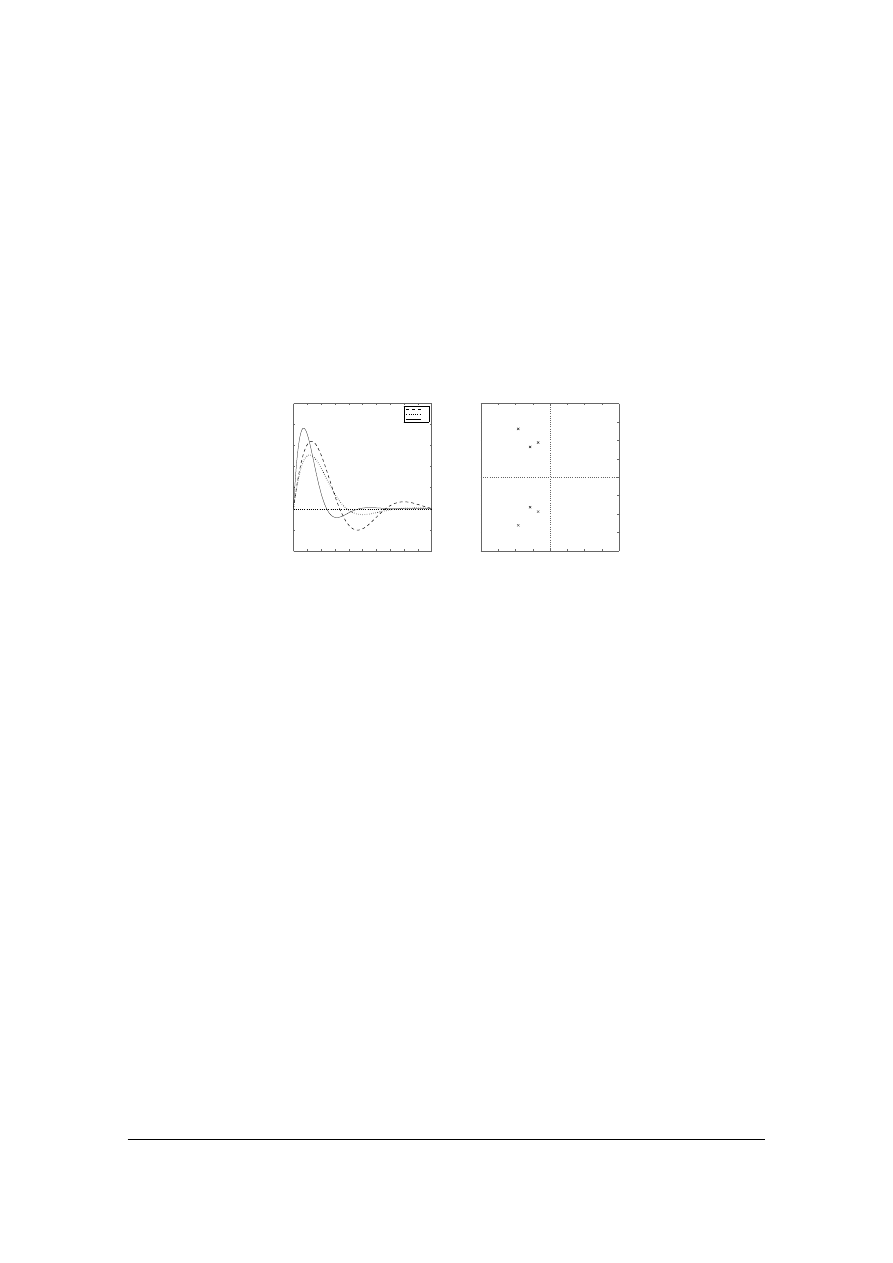
2. (EW1, waga 1.0) Na rysunkach pokazano położenie biegunów trzech systemów dru-
giego rzędu oraz odpowiadające im odpowiedzi impulsowe. Proszę powiązać pary
biegunów 1, 2 i 3 z właściwą odpowiedzią impulsową A, B lub C.
0
1
2
3
4
5
6
7
8
9
10
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Impulse Response
Time (seconds)
Amplitude
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
Pole−Zero Map
Real Axis (seconds
−1
)
Imaginary Axis (seconds
−1
)
G1
G2
G3
3. (EW1, waga 1.0) Co oznacza, że system jest liniowy? W jaki sposób możemy badać
liniowość systemu?
4. (EW2, waga 1.5) Co to jest korelacja sygnałów? Do czego jest ona stosowana?
5. (EW2, waga 1.0) Podać definicję sygnału energii oraz sygnału mocy. Podać przy-
kładowy sygnał energii i mocy (tj. narysować przebieg oraz napisać równanie w
dziedzinie czasu).
6. (EW2, waga 1.0) Jaki jest związek pomiędzy dystrybucją Diraca a skokiem jednost-
kowym? Zapisać odpowiednie równanie.
7. (EW3, waga 1.5) Wymienić rodzaje modulacji sygnałów ciągłych oraz podać ich
wzory ogólne.
8. (EW3, waga 1.0) Naszkicować charakterystyki częstotliwościowe dla idealnego filtra
środkowoprzepustowego. Podać jego podstawowe gabaryty.
9. (EW3, waga 1.0) Podać związek pomiędzy odpowiedzią jednostkową a odpowiedzią
skokową układu.
10. (EW4, waga 1.0) Jakie są kolejne etapy algorytmu filtracji Kalmana? Jaki jest ich
wpływ na jakość filtracji?
11. (EW4, waga 1.0) Wymienić założenia odnośnie błędów przetwarzania oraz pomia-
rowych stosowane przy konstrukcji filtra Kalmana. Dlaczego macierze kowariancji
błędów przetwarzania Q i pomiarowych R są diagonalne?
Zadanie 9. zostało po egzaminie anulowane.
Wyszukiwarka
Podobne podstrony:
2015 02 03 Gużyński# W Polsce źle r
1Wc 1Ca Wykład 27 02 i 5 03 2015 ETAPY EKSPERYMENTUid 19211 pptx
0656PWsrT Rysunek 02 03
2015 02 10 tabela0 1
Egzamin 2015 poziom podstawowy
egzamin z metodyki 3 02 2009r 4rok
anatomia egzamin 2015
02 03
GIge zal 06 02 03 Przekroj geo inz
Ksiega Prawdy 2015 02
Neuropsychologia kliniczna PRZYBORSKA W5A afazje cd 02 03 15 do pdf odblokowany
DGP 2014 02 03 rachunkowosc i a Nieznany
higiena 02.03.2007, HIGIENA - WYKłADY NA PWSZ
02 03 2012 wiedza o państwie i prawie
Lecture 01 02 03 Computer Unix
ExampleExam US N(02 03)
3. Mikrobiologia 02.03.2012r. - OUN
więcej podobnych podstron