INSTYTUT KONSTRUKCJI MASZYN
Katedra Maszyn Roboczych i Transportu Bliskiego
LABORATORIUM
NAP
Ę
D I STEROWANIE
HYDRAULICZNE I PNEUMATYCZNE
Temat: Wyznaczanie sprawno
ś
ci pompy wyporowej
Grupa: ........................ Zespół: .........................
Lp
Nazwisko i Imię
Ocena
Data
Parametry pracy pomp wyporowych
Głównymi jednostkami napędu hydrostatycznego są pompy i silniki hydrauliczne. Wspólną
ich funkcją jest zmiana rodzaju energii. Pompy zamieniają energię mechaniczną w energię hydrau-
liczną magazynowaną pod postacią ciśnienia przepływającego czynnika roboczego (cieczy hydrau-
licznej), silniki natomiast zamieniają energię hydrauliczną w energię mechaniczną. Bardzo istotne
jest przy tym, by zamiana energii odbywała się przy minimalnych jej stratach. W układach napędo-
wych i sterujących maszyn i urządzeń, ze względu na relatywnie wysoką sprawność energetyczną,
zastosowanie znajdują głównie pompy i silniki wyporowe.
Pompy wyporowe charakteryzują się tym, że przestrzeń ssawna oddzielona jest w nich szczel-
nie od przestrzeni tłocznej przez odpowiednio ukształtowany element, którego ruch wypiera ciecz z
jednej przestrzeni do drugiej, wymuszając odpowiednio ruch cieczy. Zasada działania silników wy-
porowych jest odwróceniem działania pomp wyporowych, stąd wiele pomp wyporowych jest jed-
nostkami odwracalnymi, czyli może pracować jako silniki wyporowe.
W zależności od kształtu i rozmieszczenia elementów wyporowych wyróżnia się następujące
rodzaje jednostek:
- pompy i silniki zębate o zazębieniu zewnętrznym i wewnętrznym,
- pompy i silniki wielotłoczkowe osiowe lub promieniowe,
- pompy i silniki łopatkowe,
- silniki o ruchu postępowym (cylindry hydrauliczne),
oraz inne o mniejszym zakresie zastosowań jak np.: pompy i silniki gerotorowe, pompy membra-
nowe, itp. Największe zastosowanie w hydraulicznych układach napędowych maszyn, mają pompy i
silniki wielotłokowe osiowe, pompy i silniki zębate oraz cylindry hydrauliczne.
Parametrem charakterystycznym pomp i silników wyporowych jest objętość skokowa q (teo-
retyczna objętość przypadająca na jeden obrót wału maszyny) lub objętość jednostkowa
ϕ
V
(objętość
przypadająca na jeden radian obrotu wału maszyny). Poprzez ten parametr wyznacza się wydajność
teoretyczną lub chłonność teoretyczną (idealną, geometryczną) pomp i silników Q
t
:
n
q
Q
t
⋅
=
lub
ω
⋅
=
t
t
V
Q
(1)
gdzie:
ω
.
n
- odpowiednio, prędkość obrotowa i prędkość kątowa,
przy czym objętość skokowa i objętość jednostkowa związane są zależnością:
π
ϕ
2
q
V
=
.
Objętość skokowa nazywana jest także w literaturze fachowej geometryczną objętością robo-
czą, czy też wydajnością jednostkową lub właściwą w przypadku pomp i chłonnością jednostkową
lub właściwą w przypadku silników. Objętość skokowa określona jest na podstawie parametrów
geometrycznych elementu wypierającego.
Wyróżnia się pompy o stałej wydajności i pompy o zmiennej wydajności oraz silniki o stałej
chłonności i o zmiennej chłonności. W przypadku pomp i silników o zmiennej objętości (chłonno-
ś
ci), zależność na wydajność teoretyczną lub chłonność teoretyczną (1), przyjmuje postać:
n
q
Q
t
⋅
⋅
=
ε
lub
ω
ε
ϕ
⋅
⋅
=
V
Q
t
(1')
gdzie:
ε
- jest parametrem nastawy (regulacji) określającym stosunek danej (bieżącej) wartości na-
stawy, do maksymalnej nastawy przewidywanej dla danej konstrukcji. Wartość parametru
nastawy może się zatem zmieniać od 0 do 1.
Moc teoretyczną pompy lub silnika N
t
określa związek w postaci:
p
Q
N
t
t
∆
⋅
=
(2)
przy czym uwzględnienie parametru nastawy prowadzi do zależności:
p
n
q
N
t
∆
⋅
⋅
⋅
=
ε
lub
p
V
N
p
t
∆
⋅
⋅
⋅
=
ω
ε
ϕ
(2')
Moment teoretyczny (idealny) M
t
pompy lub silnika dla
ε
= 1 bez uwzględnienia strat, wyznacza się
z równania mocy dla stanu ustalonego:
p
Q
M
t
t
∆
⋅
=
⋅
ω
zatem:
p
V
p
Q
M
t
t
∆
⋅
=
∆
⋅
=
ϕ
ω
(3)
Wynika stąd, że moment teoretyczny zależny jest jedynie od objętości jednostkowej (skokowej)
i różnicy ciśnień na wejściu i wyjściu pompy lub silnika hydraulicznego. Dla jednostek o zmiennej
wydajności (chłonności) moment teoretyczny wyraża się zależnością:
p
V
M
t
∆
⋅
⋅
=
ϕ
ε
lub
p
q
M
t
∆
⋅
⋅
=
π
ε
2
(3')
Przedstawione zależności (1), (2), (3) dotyczą jednostek idealnych, nie uwzględniają bowiem
strat występujących w rzeczywistych pompach i silnikach. Straty te dzieli się zwykle na straty obję-
tościowe i straty hydrauliczno-mechaniczne.
Straty objętościowe wpływające na wydajność teoretyczną pomp i chłonność silników są
związane przede wszystkim z przeciekami czynnika z komór wyporowych. Straty te określa się za
pomocą sprawności objętościowej (volumetrycznej).
Straty hydrauliczno-mechaniczne są związane z oporami przepływu oleju we wszystkich kana-
łach wewnętrznych jednostki oraz ze stratami tarcia na powierzchniach elementów będących w ru-
chu względnym, w czasie pracy jednostki. Straty te wyrażające się momentem strat są ujmowane
łącznie
i określane za pomocą sprawności hydrauliczno -mechanicznej.
Zadanie pomp wyporowych polega na zasilaniu układu hydraulicznego cieczą roboczą pod
odpowiednim ciśnieniem. Stanowią one zatem źródło natężenia przepływu (wydatku) w układzie
hydraulicznym, toteż nazywane są niekiedy generatorami wydatku.
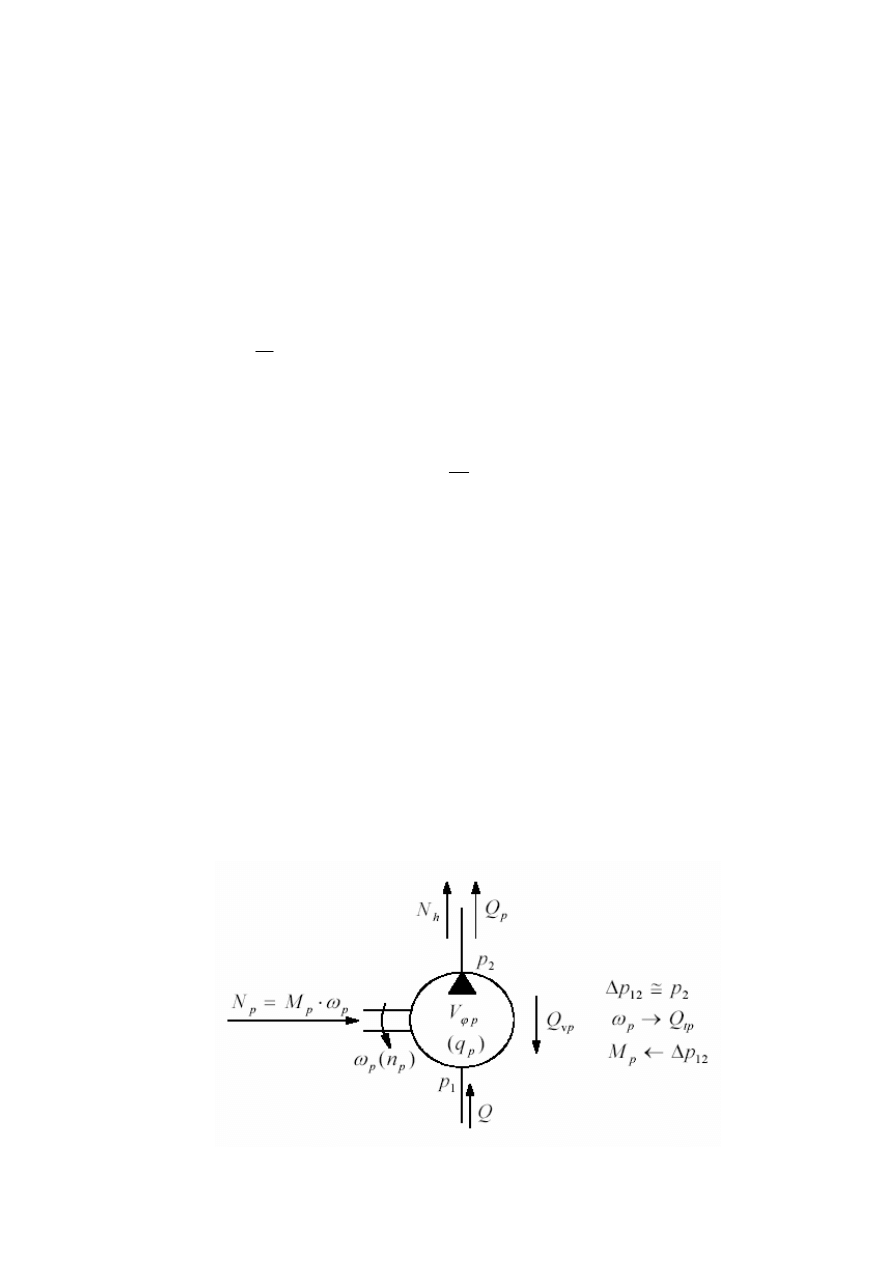
Podstawowymi parametrami pracy pompy są: wydajność pompy Q
p
przy ustalonej prędkości
obrotowej n
p
oraz ciśnienie na wyjściu pompy (ciśnienie tłoczenia) p
2
.
Rys. 1. Symbol graficzny pompy wyporowej wraz z oznaczeniem parametrów pracy

Sprawność objętościowa
Teoretycznie wydajność pompy nie zależy od ciśnienia tłoczenia a wynika jedynie z geome-
trycznych wymiarów elementów pompy. Wskutek istnienia technologicznych luzów pomiędzy ru-
chomymi elementami pompy oraz wskutek warunków na ssaniu (tj. niecałkowitego napełnienia
komory ssawnej), wydajność rzeczywista Q
p
jest mniejsza od teoretycznej Q
tp
o wartość strat obję-
tościowych Q
vp
. Znając straty objętościowe można wyznaczyć sprawność objętościową pompy defi-
niowaną jako stosunek wydajności rzeczywistej Q
p
do wydajności teoretycznej Q
tp
, czyli:
p
p
vp
tp
vp
tp
tp
p
vp
n
q
Q
Q
Q
Q
Q
Q
⋅
−
=
−
=
=
1
η
(4)
Ze związku (2.4) wynika, że wydajność rzeczywistą pompy można określić na podstawie znajomo-
ś
ci wydajności teoretycznej i sprawności objętościowej:
vp
p
p
vp
p
p
vp
tp
p
V
n
q
Q
Q
η
ω
η
η
ϕ
⋅
⋅
=
⋅
⋅
=
⋅
=
(4')
Ponieważ Q
vp
, a zatem
vp
η
zależy od różnicy ciśnień
12
p
∆
, straty objętościowe można wyznaczyć z
zależności:
p
C
Q
vp
vp
∆
⋅
=
(5)
gdzie:
C
vp
- współczynnik przecieku pompy określony dla danego typu pompy i danej lepkości cie-
czy roboczej.
Uwzględniając powyższą zależność w wyrażeniu (4) widać, że wydajność rzeczywista pompy jest
funkcją ciśnienia. Należy podkreślić, że zależność (5) jest konsekwencją założenia, że wielkość
przecieków w pompie sprowadzić można do przepływu cieczy przez szczeliny. Uwzględniając pa-
rametry geometryczne szczeliny (przepływ laminarny), straty objętościowe (przecieki) można okre-
ś
lić również z zależności:
µ
µ
ϕ
µ
12
12
3
12
p
V
C
p
l
b
c
Q
p
v
vp
∆
⋅
⋅
=
∆
⋅
⋅
⋅
=
(5')
gdzie:
µ
v
C
- stała związana z określoną konstrukcją pompy,
c
b
l ,
,
- odpowiednio długość, szerokość i grubość szczeliny,
µ
- współczynnik lepkości dynamicznej.
Stąd straty objętościowe są proporcjonalne do różnicy ciśnień i do trzeciej potęgi grubości
szczeliny, a więc do luzów między współpracującymi elementami oddzielającymi przestrzenie o
różnych ciśnieniach. Na wydajność pompy mają również wpływ straty wywołane nie całkowitym
napełnieniem komór roboczych pomp w czasie ssania (spowodowane np. zapowietrzeniem lub zbyt
dużymi oporami przepływu cieczy), a także straty związane ze ściśliwością cieczy i odkształceniem
elementów konstrukcyjnych pompy. Straty te przy prawidłowo zaprojektowanych jednostkach są
małe i mogą być często pominięte przy obliczeniach. Stąd też korzystając z zależności (4) i (5) moż-
na zapisać:
dla
const
n
p
=
const
p
vp
12
1
∆
−
=
η
dla
const
p
=
∆
12
p
vp
n
const
−
=
1
η
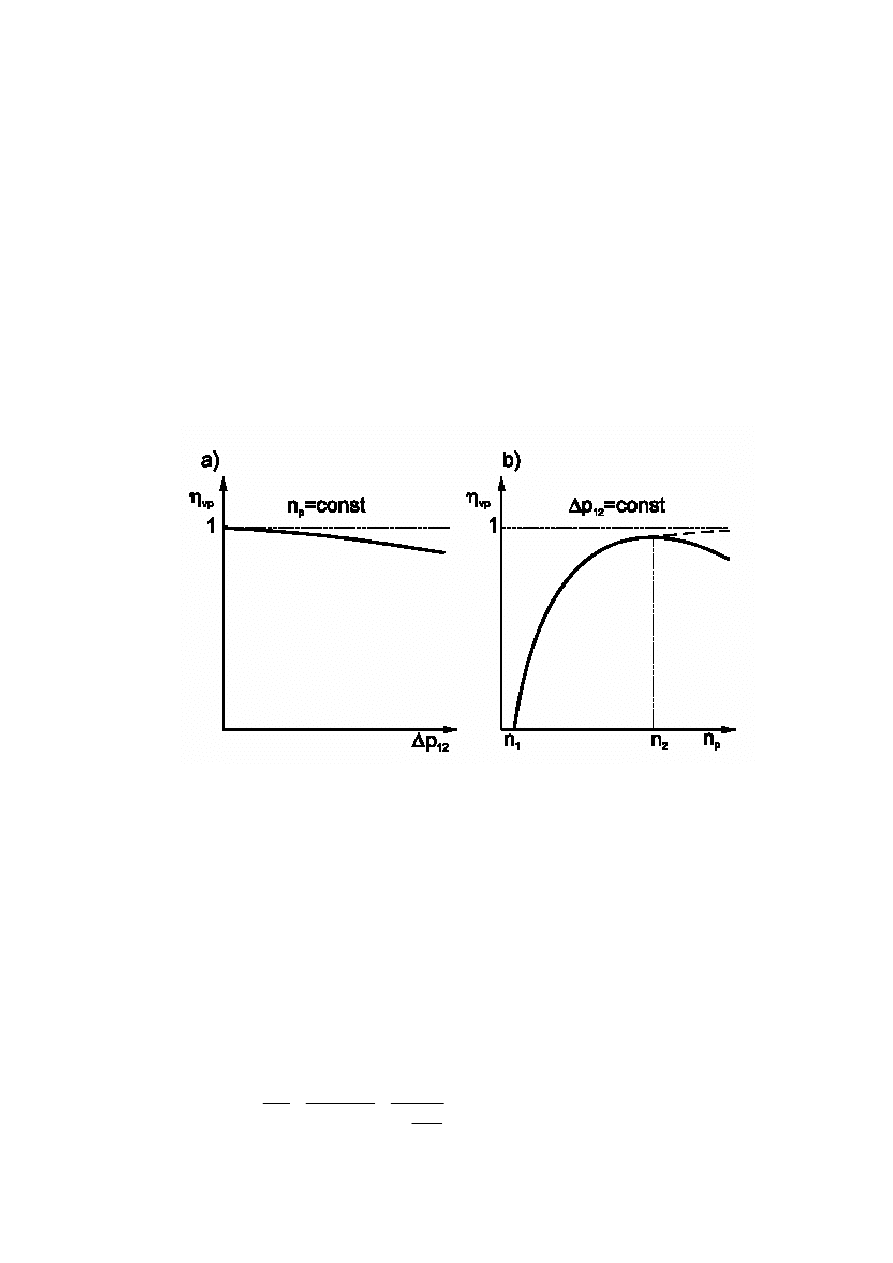
zatem charakter zmian sprawności objętościowej pompy w funkcji ciśnienia i prędkości obrotowej
można przedstawić jak na wykresach rys. 2 a,b.
Z przedstawionych wykresów wynika, że sprawność objętościowa maleje liniowo ze wzro-
stem ciśnienia. Rzeczywisty przebieg
)
( p
f
vp
∆
=
η
będzie nieco różnił się od przebiegu przedstawio-
nego na rys. 2a, ze względu na wpływ wcześniej wspomnianych innych strat objętościowych. Łatwo
zauważyć, że wykres przedstawiony na rys. 2a jest także, w innej skali, obrazem zmian wydajności
rzeczywistej Q
p
w funkcji obciążenia, czyli
)
( p
f
Q
p
∆
=
. Na rys. 2b przedstawiono przebieg zależno-
ś
ci objętościowej sprawności pompy przy zmianie prędkości obrotowej dla ustalonej wartości ci-
ś
nienia. W zakresie bardzo małych prędkości tj. n < n
1
sprawność
0
=
vp
η
. Jest to spowodowane
tym, że przy małych prędkościach wydajność pompy jest tak bardzo mała, iż nie pokrywa we-
wnętrznych strat objętościowych. W miarę zwiększania prędkości obrotowej od n
1
, sprawność obję-
tościowa gwałtownie rośnie i osiąga swoje maksimum przy wartości n
2
, a następnie maleje wskutek
niecałkowitego wypełnienia komór roboczych pompy w czasie ssania.
Rys. 2. Teoretyczny przebieg obj
ę
to
ś
ciowej sprawno
ś
ci pompy wyporowej:
a)
)
(
12
p
f
vp
∆
=
η
b)
)
(
p
vp
n
f
=
η
Oprócz opisanych strat objętościowych w pompach wyporowych występują straty hydrauliczno-
mechaniczne. Obejmują one straty związane z oporami przepływu czynnika w kanałach wewnętrz-
nych pompy (straty hydrauliczne) oraz straty wywołane oporami tarcia (straty mechaniczne). Straty
te wyrażone są sumarycznym momentem strat i określane za pomocą sprawności hydrauliczno-
mechanicznej.
Sprawność hydrauliczno-mechaniczna pompy
Sprawność hydrauliczno-mechaniczna pompy
hmp
η
jest to stosunek momentu teoretycznego
pompy
tp
M
do momentu rzeczywistego pompy
p
M
, czyli:
tp
str
str
tp
tp
p
tp
hmp
M
M
M
M
M
M
M
+
=
−
=
=
1
1
η
(6)
przy czym:
M
tp
- moment teoretyczny (idealny) jest to moment, jaki byłby potrzebny do napędu pompy gdyby
nie istniały w pompie żadne opory tarcia ani opory przepływu cieczy w pompie, zgodne z za-
leżnością (3):
π
ϕ
2
12
12
p
q
p
V
M
p
p
tp
∆
⋅
=
∆
⋅
=
(7)
M
p
- moment rzeczywisty jest to moment obrotowy, jaki trzeba doprowadzić do wału pompy, aby
otrzymać jej pracę, czyli:
str
tp
p
M
M
M
+
=
(8)
M
str
- moment strat hydrauliczno-mechanicznych jest sumą momentu strat tarcia lepkiego
µ
M
zależ-
nego od prędkości i lepkości, momentu strat tarcia mechanicznego (kulombowskiego)
f
M
,
które zależne jest od obciążenia, momentu strat hydraulicznych
h
M
(proporcjonalnego do kwa-
dratu prędkości) i momentu strat stałych
0
M
niezależnego od parametrów ruchowych, czyli:
0
M
M
M
M
M
h
f
str
+
+
+
=
µ
(9)
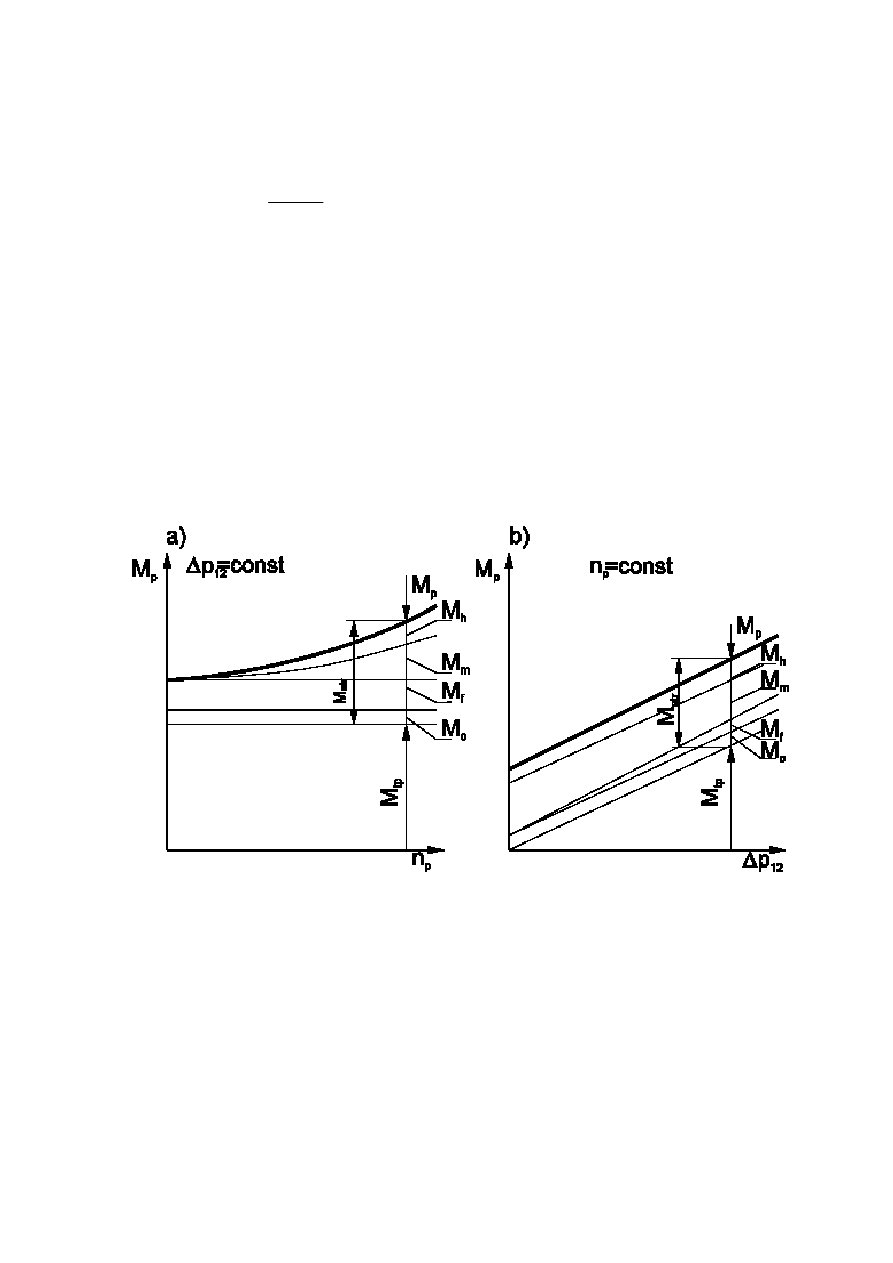
Rys. 3. Przebieg momentu rzeczywistego pompy
p
M
w zale
ż
no
ś
ci od:
a) pr
ę
dko
ś
ci obrotowej wałka pompy
p
n
, b) ró
ż
nicy ci
ś
nie
ń
12
p
∆
(obci
ąż
enia)
Teoretyczny przebieg momentu rzeczywistego
p
M
dla pompy wyporowej przedstawiono na
rys. 3. W nowoczesnych jednostkach wyporowych dominujące znaczenie posiadają: moment strat
tarcia lepkiego
µ
M
(zależny od prędkości i lepkości) oraz moment strat tarcia suchego
f
M
(zależny
od obciążenia). Dla zobrazowania charakteru zmian sprawności hydrauliczno -mechanicznej w
funkcji prędkości oraz w funkcji ciśnienia przyjąć można zgodnie z wyżej przedstawionym podzia-
łem momentów strat następujące związki:
2
)
(
n
C
n
B
A
n
f
M
str
⋅
+
⋅
+
=
=
E
p
D
p
f
M
str
+
∆
⋅
=
∆
=
)
(
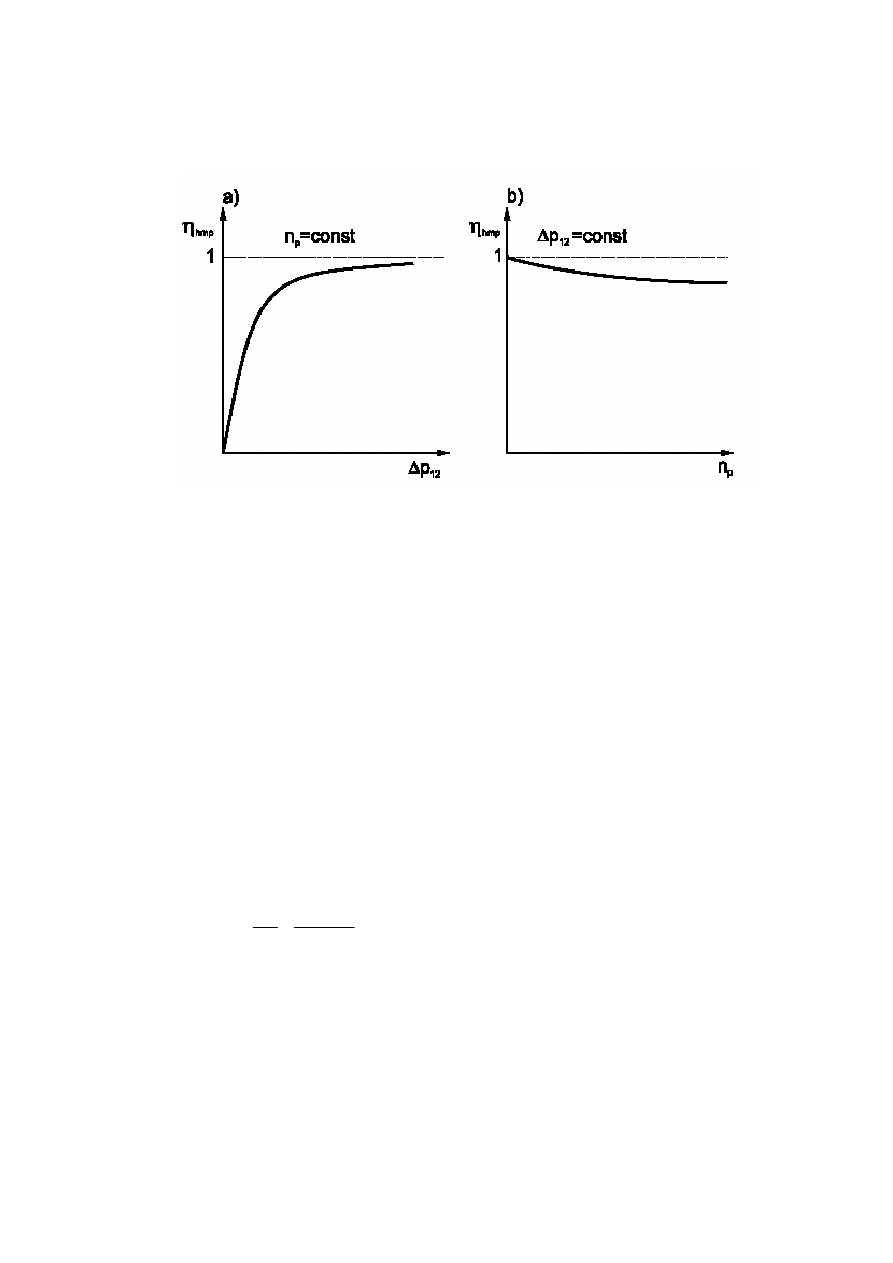
Związki te przy wykorzystaniu zależności (6) pozwalają przedstawić teoretyczny przebieg sprawno-
ś
ci hydrauliczno-mechanicznej pompy wyporowej w postaci jak na rys. 4.
Rys. 4. Teoretyczny przebieg sprawno
ś
ci hydrauliczno-mechanicznej pompy wyporowej
hmp
η
;
a) w funkcji ci
ś
nienia
12
p
∆
,
b) w funkcji pr
ę
dko
ś
ci obrotowej
p
n
Moc oddawana przez pompę, czyli moc efektywna, którą można wykorzystać w układzie na-
pędowym jest równa iloczynowi wydajności rzeczywistej pompy Q
p
i różnicy ciśnień na pom-
pie
12
p
∆
tak więc:
12
12
12
p
n
q
p
Q
p
Q
N
vp
p
p
vp
tp
p
h
∆
⋅
⋅
⋅
=
∆
⋅
⋅
=
∆
⋅
=
η
η
(10)
Natomiast moc pobierana przez pompę, czyli moc, którą należy doprowadzić do silnika na-
pędowego, nazywa się mocą napędową pompy, która wynosi:
p
p
p
p
p
M
M
n
N
⋅
=
⋅
⋅
=
ω
π
2
(11)
Stosunek mocy oddanej przez pompę, czyli mocy efektywnej (hydraulicznej) N
h
uzyskiwanej
z pompy, do mocy doprowadzonej do pompy N
p
określa sprawność ogólna (całkowita) pompy
p
η
stąd:
p
p
p
p
h
p
M
p
Q
N
N
n
ω
⋅
∆
⋅
=
=
12
(12)
Można wykazać, że sprawność ogólna pompy
p
η
jest iloczynem jej sprawności objętościo-
wej
vp
η
i hydrauliczno-mechanicznej
hmp
η
:
hmp
vp
p
η
η
η
⋅
=
(13)
Charakterystyczne parametry pompy można przedstawić w postaci wykresów, które pozwala-
ją na dobór właściwej pompy. Istnieje wiele rodzajów tych wykresów, przy czym uwzględniają one
takie wielkości charakteryzujące pracę pompy, jak: ciśnienie
p
∆
, wydajność Q
p
, sprawności
vp
p
η
η
,
,
moc na wale pompy N
p
, prędkość obrotowa pompy n
p
, a dla pomp o zmiennej wydajności również
wielkość regulowaną np. kąt pochylenia tarczy
δ
. Najczęściej w katalogach pomp spotyka się wy-
kresy zależności:
)
( p
f
Q
p
∆
=
,
)
( p
f
p
∆
=
η
,
)
( p
f
vp
∆
=
η
oraz
)
( p
f
N
p
∆
=
dla
const
n
=
, oraz
)
(
n
f
N
p
=
i
)
(
n
f
M
p
=
dla
const
p
=
∆
.
Dogodną formę, przedstawienia parametrów eksploatacyjnych pomp uzyskuje się stosując
charakterystyki uniwersalne, które przedstawiają wykres wydajności pomp Q
p
w funkcji ciśnienia,
z naniesionymi krzywymi prędkości obrotowej i mocy pobieranej oraz sprawności. Pozwalają one
na szybki dobór odpowiednich pomp dla projektowanego układu.
Lepko
ść
oleju
Ponieważ jednym z najistotniejszych parametrów mających wpływ na charakterystyki
sprawności pompy jest lepkość, na opracowanych wykresach sprawności w funkcji ciśnienia należy
podać wartość współczynnika lepkości cieczy roboczej, przy jakim przeprowadzona była próba.
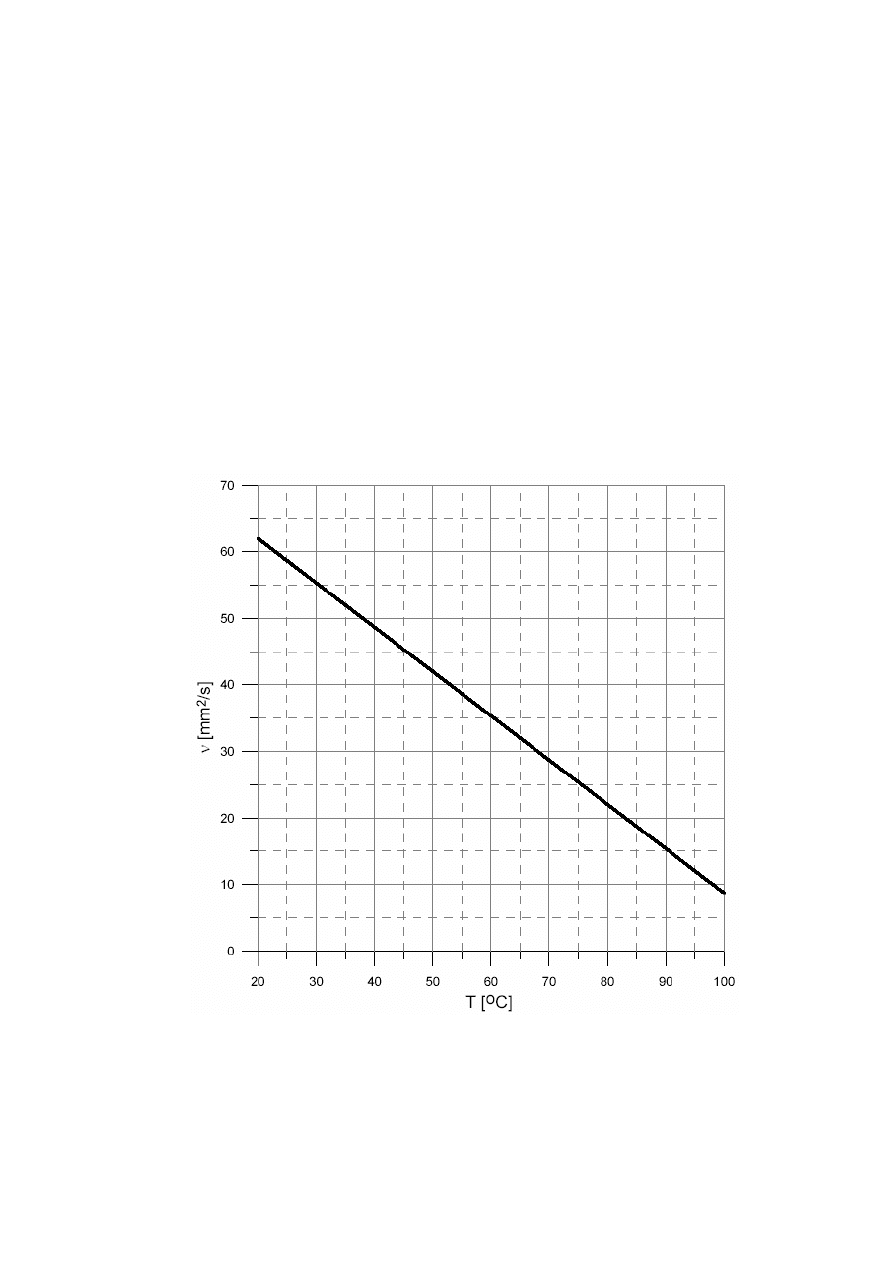
W stanowisku zastosowano olej biodegradalny typu HEES firmy Caterpillar, dla którego przybliżo-
na charakterystyka współczynnika lepkości kinematycznej w funkcji temperatury zamieszczona jest
na rys. 5.
Rys. 5. Charakterystyka współczynnika lepko
ś
ci kinematycznej oleju HEES firmy Caterpillar
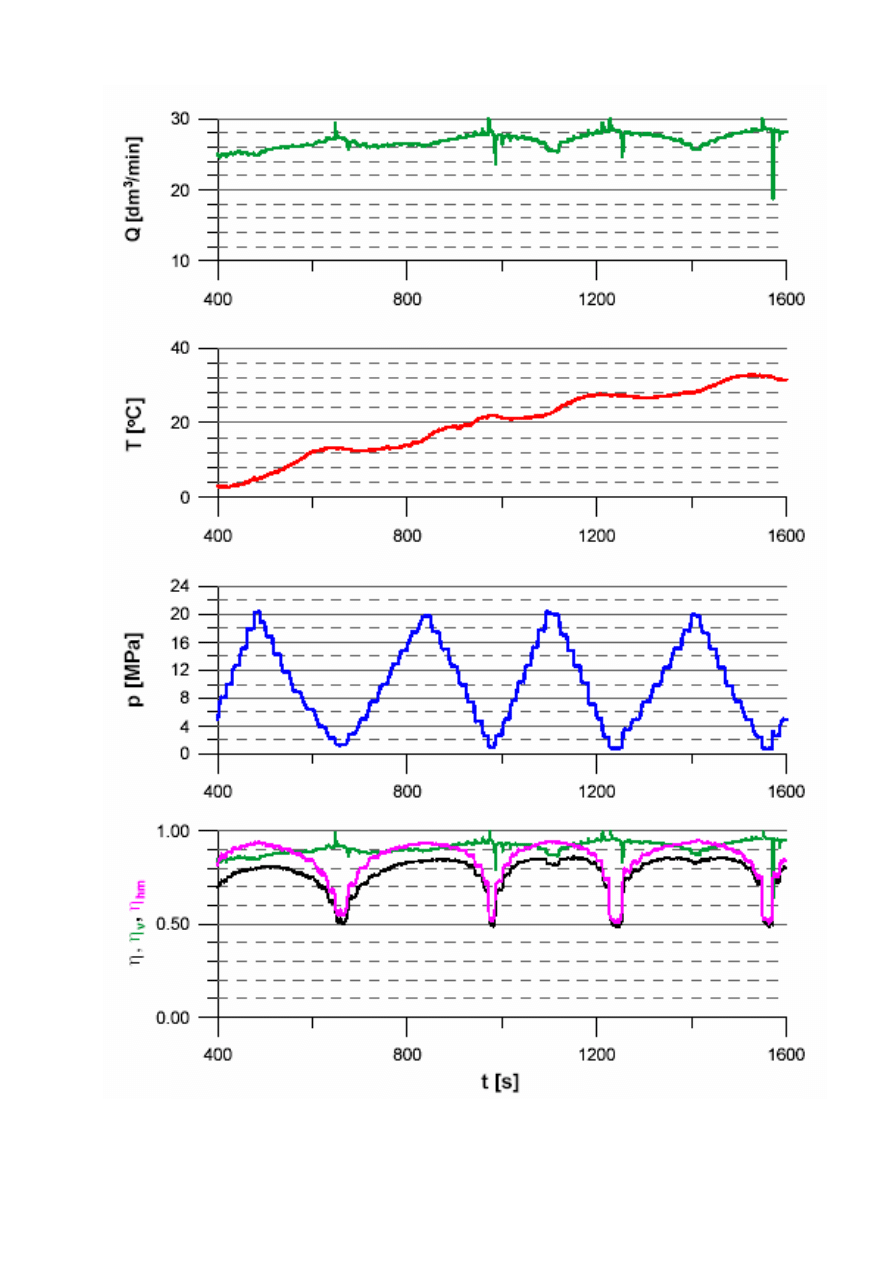
Rys. 8. Przykładowe przebiegi parametrów przy wyznaczeniu sprawno
ś
ci pompy
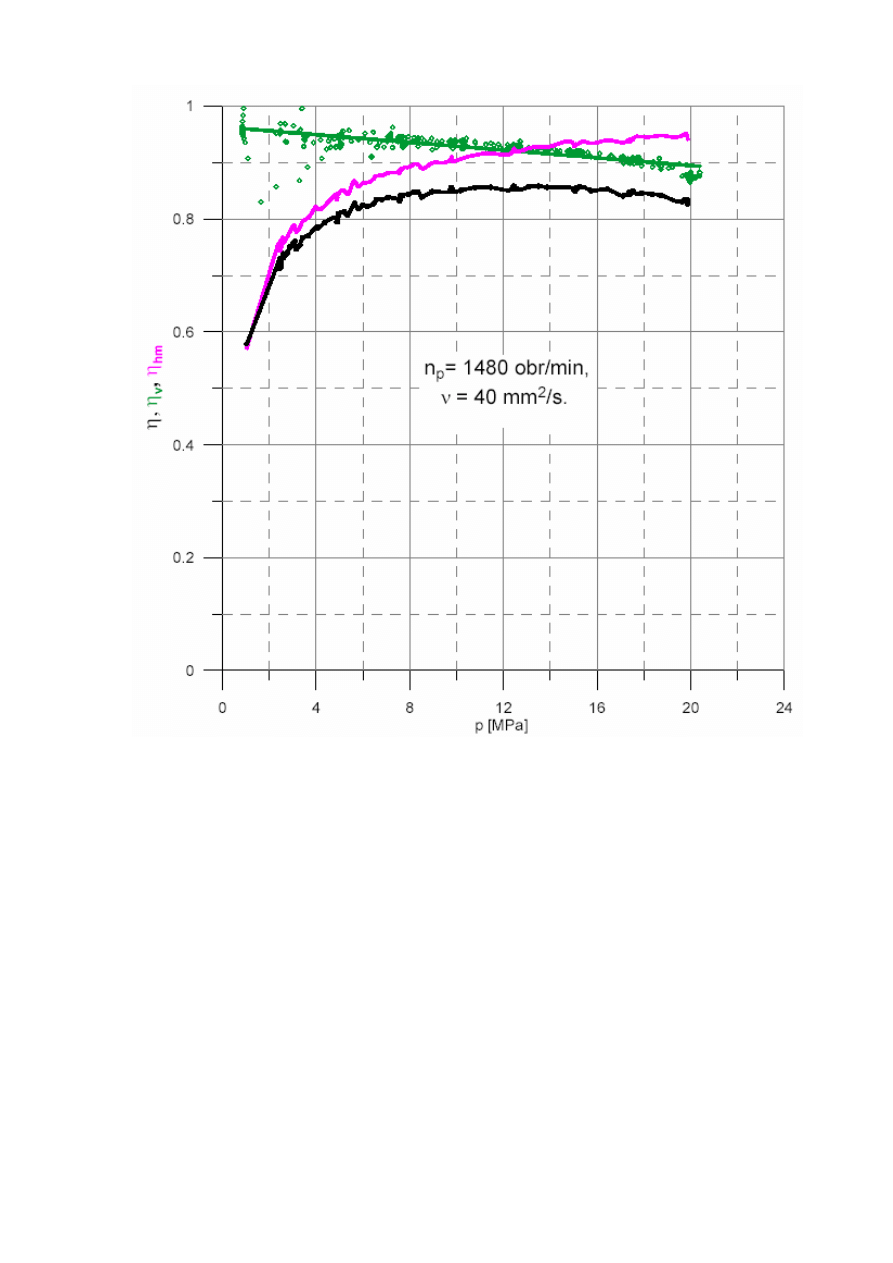
Rys. 7. Przykładowe charakterystyki wyznaczonej sprawno
ś
ci pompy w funkcji ci
ś
nienia
Wymagania do sprawozdania:
1.
sprawozdanie studenci wykonują dwójkami,
2.
sprawozdanie powinno zawierać:
−
krótki opis wykonywanego ćwiczenia,
−
schemat ideowy stanowiska badawczego wraz z czujnikami pomiarowymi,
−
wykaz (tabela) mierzonych parametrów oraz procedurę obliczania sprawności obj.,
hydr.mech. i ogólnej,
−
przebiegi parametrów mierzonych i obliczonych,
−
charakterystyki sprawności w funkcji ciśnienia z podanie parametrów, przy jakich zostały
wyznaczone ( prędkość obrotowa, współczynnik lepkości, temperatura, typ oleju),
−
wnioski,
3.
nie należy do sprawozdania dołączać kserowanych i skanowanych materiałów,
4.
nie będą przyjmowane sprawozdania będące wielokrotnym wydrukiem tego samego pliku,
5.
oszczędzać papier – optymalnie dobierać wielkość rysunków, stronę tytułową ograniczyć do kil-
ku centymetrów nagłówka itp.
Wyszukiwarka
Podobne podstrony:
2.1. Opracowanie. Wyznaczanie sprawnosci pompy wyporowej
2 2 Prezentacja Wyznaczanie sprawnosci pompy wyporowej
07 AZE Wyznaczanie sprawności pompy ciepła w funkcji właściwości czynnika roboczego
plutecki,pompy i układy pompowe, Pompy wyporowe
SprawozdanieH Wyznaczanie sprawności transformatora trójfazowego
Wyznaczenie sprawności zespołu napędowego pod obciążeniem
Wyznaczenie sprawności energetycznej maszyn mielących sprawko
Wyznaczanie sprawności świetlnej żarówki za pomocą fotometru Lummera-Brodhuna, 309, Ćwiczenie III -
4 1 Opracowanie Badanie sprawnosci silownika
3.1. Opracowanie. Wyznaczanie charakterystyki zaworu przelewowego
opracowanie 2, WYZNACZANIE POTRZEB I NIEDOBOR˙W WODNYCH RO˙LIN UPRAWNYCH
Sprawozdanie z Badania Pompy Wyporowej, Uczelnia, Hydraulika i Pneumatyka
Sprawniejsze pompy ciepła, Energia odnawialna, pompa ciepła
wyznaczanie sprawnosci czajnika elektrycznego i grzalki elektrycznej, OTŻ, AGROFIZYKA
Wyznaczanie sprawności świetlnej żarówki za pomocą fotometru Lummera-Brodhuna, 309z, 309
309. Wyznaczanie sprawności świetlnej żarówki za pomocą fotometru, studia, studia Politechnika Pozna
Sprawozdanie09 Wyznaczanie sprawności świetlnej żarówki za pomocą fotometru Lummera Brodhuna
więcej podobnych podstron