1
Laboratorium „Sterowania mikromaszyn”, „MEMS i mikronapędy”
Badanie silnika skokowego reluktacyjnego
Celem ćwiczenia jest zapoznanie się z budową silnika skokowego reluktancyjnego, sposobem sterowania oraz
wyznaczeniem jego charakterystyk dynamicznych. Silnik skokowy rekuktancyjny z uwagi na swą budowę
najczęściej zasilany jest unipolarnie. Najprostszym sposobem jego sterowania jest sterowanie napięciowe. W
takim przypadku napięcie zasilające jest podawane na poszczególne pasma bez żadnych ograniczeń. Daje to
dobre rezultaty w zakresie stosunkowo małych częstotliwości pracy. Wraz ze wzrostem częstotliwości
taktowania prądy w poszczególnych nie osiągają już wartości ustalonych. Tym samym prowadzi to ograniczenia
wartości wytwarzanego momentu a w konsekwencji do zatrzymania silnika. Jedną z metod zapobiegania temu
problemowi jest stosowanie tzw. forsowanie wzbudzenia. Polega ono na zwiększeniu wartości napięcia
zasilającego przy jednoczesnym dołączeniu dodatkowej rezystancji R
d
ograniczającej wartość prądu do wartości
znamionowej. Układ sterowania silnika zbudowano w oparciu o układ mikroprocesora 8-bitowego. Umożliwia
ona płyną zmianę częstotliwości podawanych impulsów, zmianę kierunku wirowania oraz komutowanie
uzwojeń w sekwencji 1/4, 1/2 i 3/8.
Program ćwiczenia
1. Zapoznanie się z budową, sposobem konfiguracji uzwojeń i danymi katalogowymi silnika.
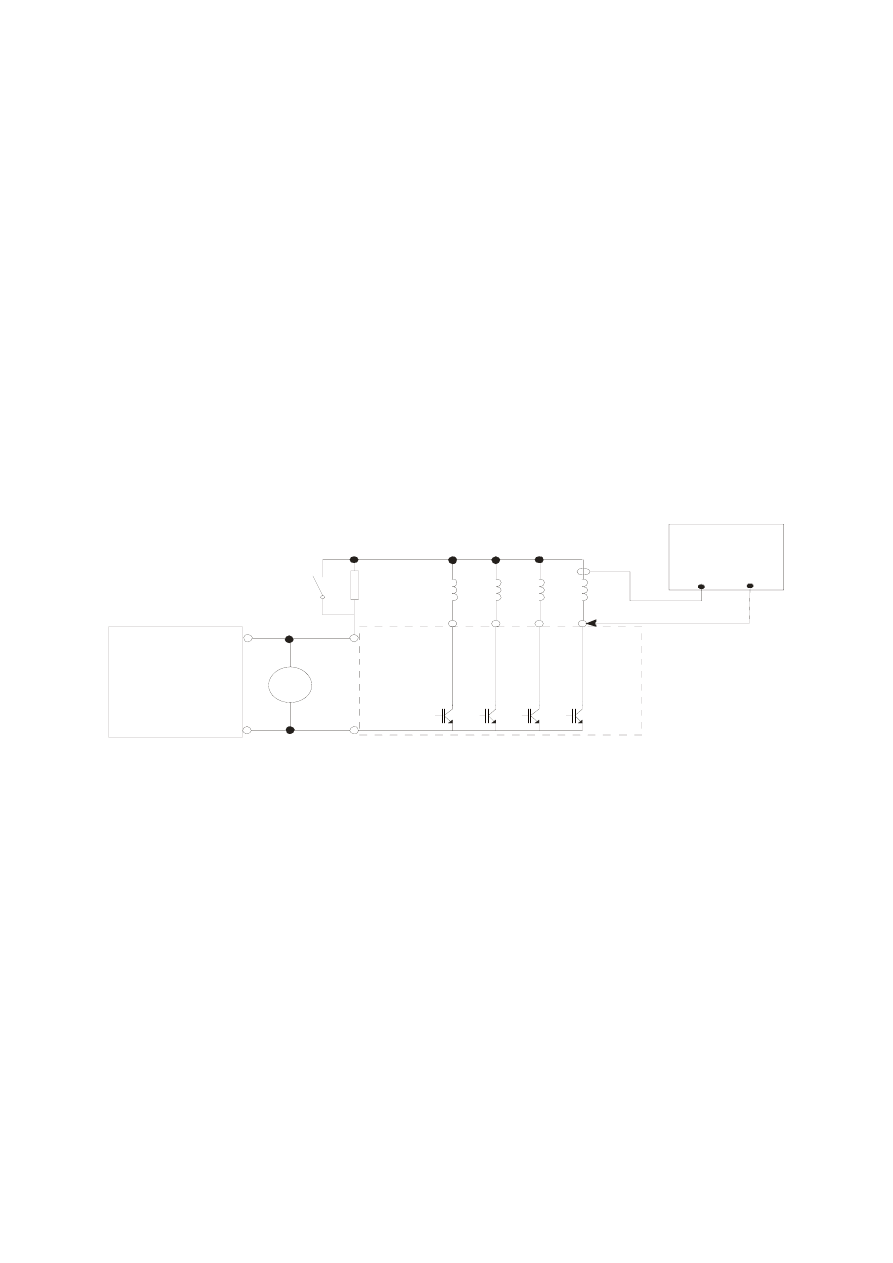
2. Połączenie układu pomiarowego zgodnie ze schematem pomiarowym pokazanym na rysunku 1.
W
Rd
Zasilacz
V
+
+
-
-
T1
T2 T3 T4
Ph1 Ph2 Ph3 Ph4
Mikroprocesorowy sterownik
silnika skokowego
Oscyloskop
cyfrowy
Rys. 1 Schemat pomiarowy do badania silnika skokowego reluktancyjnego
3. Wyznaczanie zależności częstotliwości granicznej f
g
=f(T
L
) oraz rozruchowej f
l
= f(T
L
) w warunkach
znamionowych (U
dc
=U
N
=12V) dla pracy silnika przy:
• Komutacji symetrycznej 1/4,
• Komutacji symetrycznej 1/2,
• Komutacji niesymetrycznej 3/8.
4. Wyznaczanie zależności częstotliwości granicznej f
g
=f(T
L
) oraz rozruchowej f
l
= f(T
L
) w warunkach
forsowania wzbudzenia (U
dc
>U
N
=15V oraz R
ad
≈1Ω) dla pracy silnika przy:
• Komutacji symetrycznej 1/4,
• Komutacji symetrycznej 1/2,
• Komutacji niesymetrycznej 3/8.

2
5. Wyznaczanie zależności częstotliwości nawrotu f
n
=f(T
L
) w warunkach znamionowych (U
dc
=U
N
=12V)
dla pracy silnika przy:
• Komutacji symetrycznej 1/4,
• Komutacji symetrycznej 1/2,
• Komutacji niesymetrycznej 3/8.
6. Obserwacja przebiegów czasowych prądu i napięcia.
7. Opracowanie wyników.
Obliczanie momentu obciążenia:
mgr
r
F
T
L
=
×
=
gdzie:
r= 0.1m,
m – masa obciążników [kg],
g – przyspieszenie ziemskie [m/s
2
].
Parametry znamionowe czteropasmowego silnika skokowego EDS20:
napięcie znamionowe U
N
=15V, prąd znamionowy I
Nph
=3.7A, pobór mocy P
inN
120 W, skok znamionowy
α
N
=3
°, moment znamionowy T
N
=4 Nm, maksymalny moment synchronizujący T
Ns
=10 Nm, moment
rozruchowy T
l
=71 Nm, moment bezwładności wirnika J=53300* 10
-7
kgm
2
, rezystancja pasma R
ph
=3.95
Ω,
impedancja pasma Z
ph
=30.5
Ω, częstotliwość graniczna f
g
=75 Hz.
Wyszukiwarka
Podobne podstrony:
cwiczenie iii mikromaszyny 2008
Kinezyterapia cwiczenia# 04 2008 Chod o kulach
Kinezyterapia ćwiczenia# 04 2008 Chod o kulach i PNF
cwiczenia 5 4.04.2008, Prawoznawstwo, Materialy e-learning, mgr M. Zalewska
cwiczenia 8 9.05.2008, Prawoznawstwo, Materialy e-learning, mgr M. Zalewska
cwiczenia 2 7.03.2008, Prawoznawstwo, Materialy e-learning, mgr M. Zalewska
Prawo cywilne - ćwiczenia 1.12.2008, Prawo cywilne(16)
Prawo administracyjne - K. Wlaźlak ćwiczenia 10 2008-2009, Prawo administracyjne(30)
ćwiczenie mikrometr nr2 Mi SP
cwiczenia 8 4.01.2008, cwiczenia - dr skladowski
Cwiczenia 2 Oswiecim 2008
siedliska, Zaliczenie ćwiczeń z siedliskoznawstwa 2010, Zaliczenie ćwiczeń z siedliskoznawstwa 2008/
Kinezyterapia cwiczenia# 04 2008 Chod o kulach
cwiczenia 2 6 03 2008 doc
Chemia (ćwiczenia) 5 01 2008
więcej podobnych podstron