70) Zasada działanie zasilaczy impulsowych:
- Zasada pracy stabilizatorów napięcia
stałego jest taka sama: szeregowo ze źródłem
niestabilizowanego napięcia stałego jest
włączony liniowy element regulacyjny
(tranzystor szeregowy) sterowany poprzez pętlę
sprzężenia zwrotnego tak, aby napięcie
wyjściowe (lub prąd wyjściowy) miało stałą
wartość. Wartość napięcia wyjściowego
stabilizatora jest zawsze mniejsza od wartości
napięcia niestabilizowanego doprowadzanego
do jego wejścia, a na elemencie regulacyjnym
zawsze wydziela się pewna moc (dokładniej,
moc ta jest równa średniej wartości I
wy
(U
we
–
U
wy
)). Drugorzędną odmianą stabilizatorów
napięcia stałego są stabilizatory równolegle
(ang. Shunt regulators), w których element
regulacyjny jest włączony między wyjście a
masę, a nie szeregowo z obciążeniem. Układ
stabilizatora równoległego jest podobny do
układu stabilizatora z diodą Zenera.
Stabilizatory impulsowe mają niezwykłe
właściwości, decydujące o ich dużej
popularności. Ponieważ element regulacyjny
pracuje dwustanowo — jest albo wyłączony
albo nasycony — traci się w nim bardzo mało
mocy. Dlatego stabilizatory impulsowe
charakteryzują się dużą sprawnością nawet
wtedy, gdy różnica napięć między wejściem a
wyjściem ma dużą wartość.
71)
Dławikowe przetwornice
obniżające, podwyższające i odwracające
biegunowość napięcia:
a) Przetwornica dławikowa obniżająca
napiecie:
b) Przetwornica dławikowa podwyższająca
napięcie:
c) Przetwornica dławikowa odwracająca
biegunowość napięcia:
72) Przetwornice transformatorowe:
a)
b) – przeciwsobna
74) Przetwornik cyfrowo-analogowe:
schemat blokowy, zasada działania:
Przyrząd elektroniczny przetwarzający sygnał
cyfrowy (zazwyczaj liczbę binarną ) w postaci
danych cyfrowych) na sygnał analogowy w
postaci prądu elektrycznego lub napięcia o
wartości proporcjonalnej do tej liczby. Jest
wiele sposobów konstrukcji przetworników
C/A. Obecnie najczęściej stosowanymi
przetwornikami są przetworniki połączone
równolegle, w których wszystkie bity sygnału są
doprowadzane jednocześnie. Są również
przetworniki połączone szeregowo, w których
sygnał wyjściowy jest wytwarzany dopiero po
sekwencyjnym przyjęciu wszystkich bitów
wejściowych, co sprawia że są wolniejsze od
przetworników połączonych równolegle.
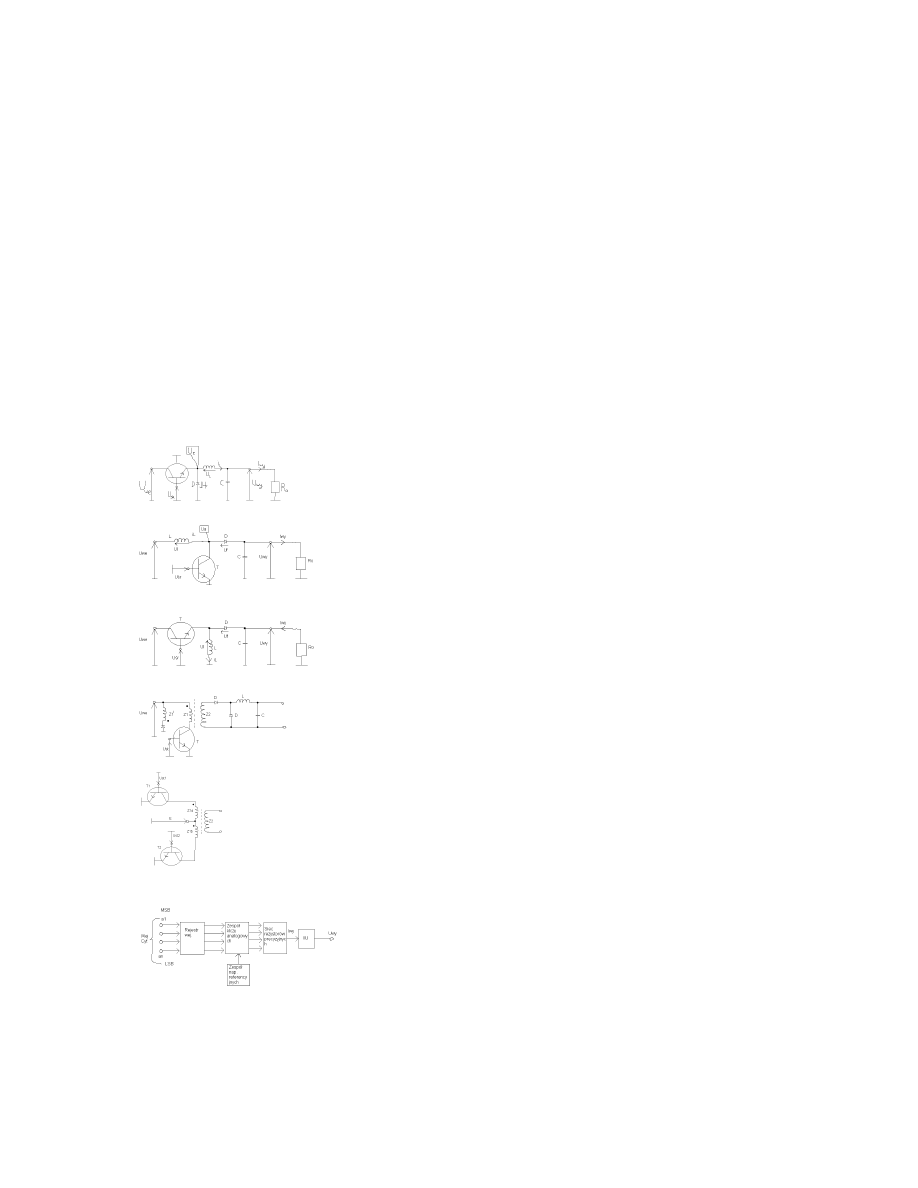
75) Przetworniki c/a z sieciami rezystorów
wagowych:
76) Przetwornik c/a z sieciami rezystorów R-
2R:
Jeżeli: a1=a2=a3=……an=0 =>Uwy=0
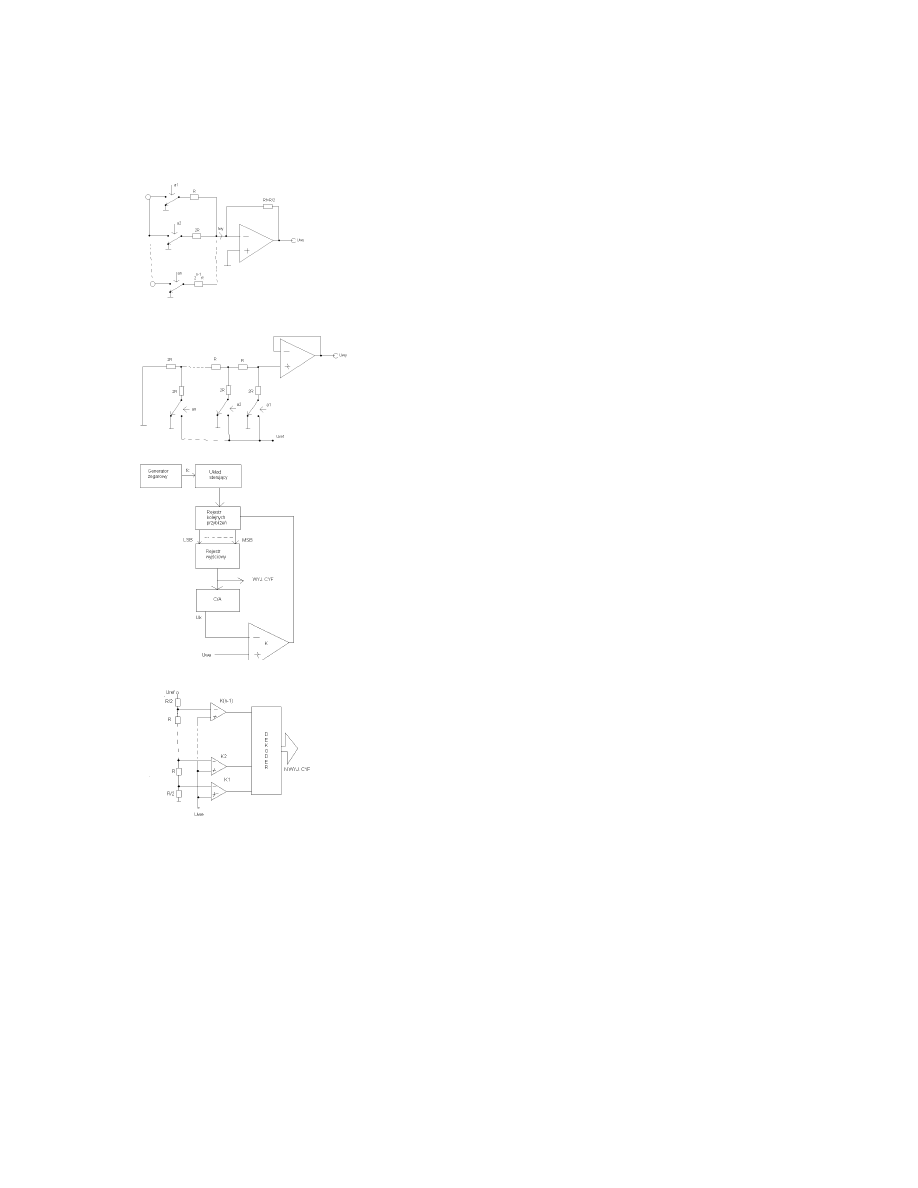
77) Schemat a/c z kompensacja wagową:
78) Przetwornik a/c z bezpośrednim
porównaniem „Flash”:
79) Błędy przetworników c/a i a/c:
- błędy wzmocnienia są określone po
skompensowaniu błędów zera. Wprzypadku
przetworników a/c jest różnica pomiędzy
nominalą, maksymalną warością sygnału wej. A
środkową wartością w ostatnim kroku
kwantowania. Błąd wzmocnienia dla
przetwornika c/a jest określony jako różnica
pomiędzy nominlanym i aktualnym położeniam
które odpowiadaja pełnemu zakresowi.
- błędy nieliniowości róniczkowej – jest to
różnica powmiędzy aktualną szerokością kroku
kwantowania lubwysokością kroku
kwantowania i teoretyczną wartością kroku
LSB.
- błędy nieliniowości całkowej są odchyleniami
wartości aktualnej charakterystyce
przetwarzania od linii prostej związanej z
przetwarzaniem idealnym. Istnieje kilka
sposobów wyznaczania linii odniesienia – w
podstwawowym rozw. Linia ta łączy punkt
zerwoy i pełej skali po skompensowaniu błdu
zera i wzmocnienia. W przypadku przetwornika
a/c powinny być mierzone w każdym kroku
kwantowania.
80) Przetworniki typu delta i delta-sigma:
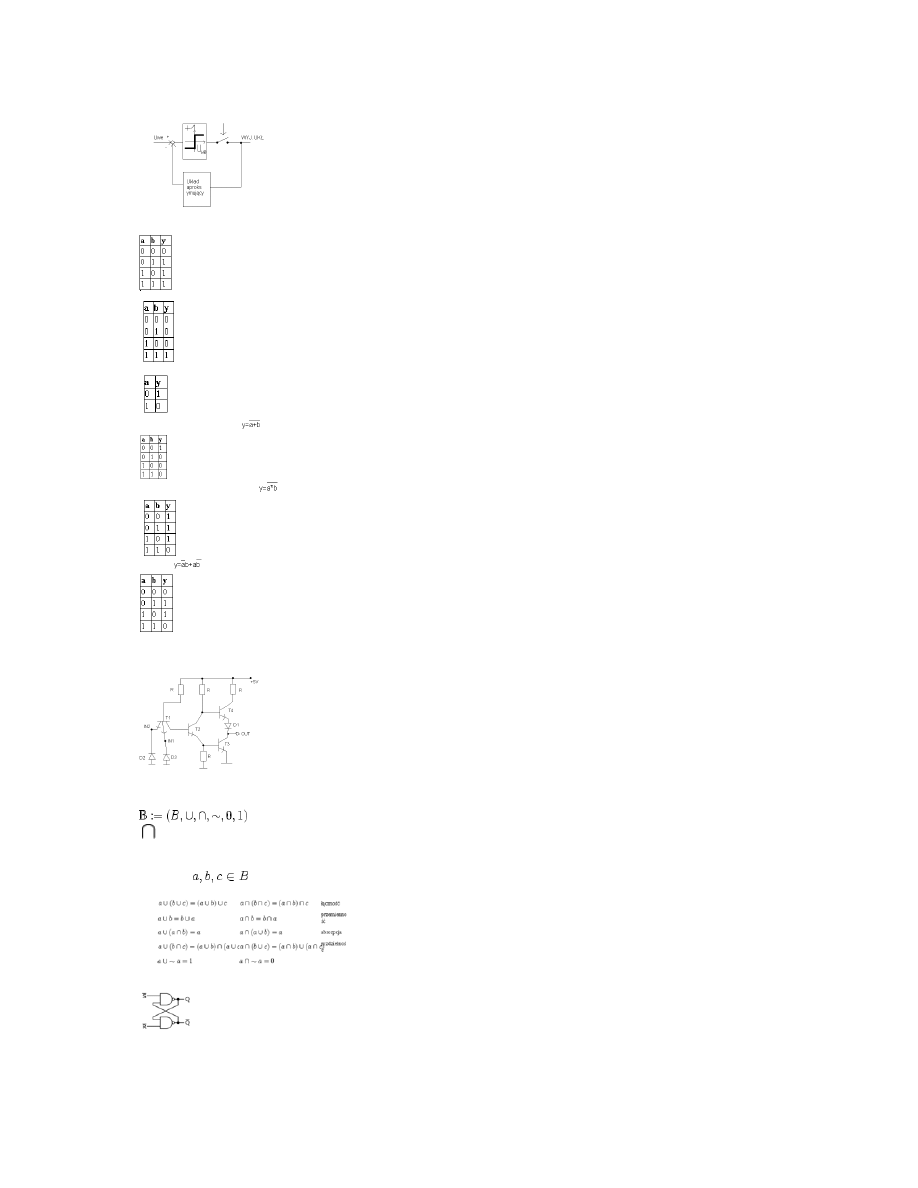
81) Podstawowe funktory logiczne:
a) Suma logiczna (OR) y=a+b
b) Iloczyn logiczny ( AND ) y=a*b
c) Negacja (NOT) y = a
d) Nie suma logiczna (NOR)
e) Nie iloczyn logiczny ( NAND )
f) ExOR
82)Układy kombinacyjne:
a) Schemat wew. Dwuwejściowej bramki
NAND
83) Algebra Boole’a:
To struktura algebraiczna
w której "U" i
"
" są działaniami dwuargumentowymi, "~"
jest operacją jednoargumentową, a "0" i "1" są
wyróżnionymi różnymi elementami zbioru B
oraz taka, że następujące warunki są spełnione
dla wszystkich
:
84) Przerzutnik RS:
a) zbudowany z bramek NAND
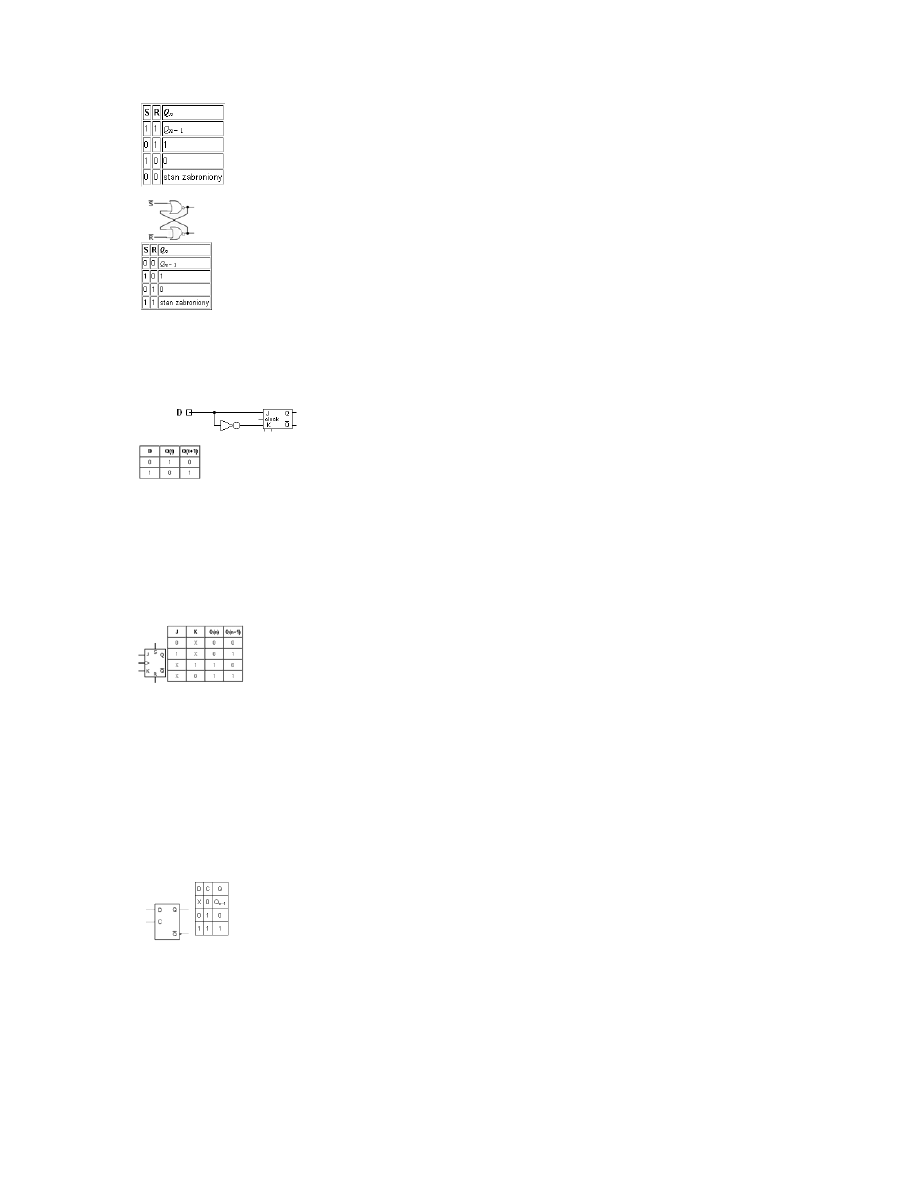
b) zbudownay z bramek NOR:
85) Przerzutniki JK i D:
a) Przerzutnik typu D (delay) (ang. Flip-flop) -
jeden z podstawowych rodzajów przerzutników
synchronicznych, nazywany układem
opóźniającym. Jest on modyfikacją przerzutnika
typu JK. Modyfikacja ta polega na połączeniu
wejścia J z zanegowanym wejściem K. Zmiana
danych następuje tylko w momencie rosnącego
zbocza
zegara.
b) JK - jeden z podstawowych rodzajów
przerzutników synchronicznych bistabilnych, na
jego podstawie można zbudować wiele innych
rodzajów przerzutników np. typu D czy JK-MS.
Przerzutnik ma wejścia informacyjne (J i K),
zegarowe (C), wyjście proste (Q) i jego negację
(nie Q), może też mieć wejście kasujące
(restartu) (R) i ustawiające (S). Przerzutnik jest
przerzutnikiem synchronicznym, co oznacza, że
zmienia stan przy zmianie stanu wejścia
zegarowego z niskiego na wysoki (0 na 1)-
wyzwalanie zboczem narastającym lub przy
zmianie stanu wejścia zegarowego z wysokiego
na niski (1 na 0)- wyzwalanie zboczem
opadającym .
86) Przerzutnik D typu "latch":
- Przerzutnik typu Latch (zatrzask) jest wersją
przerzutnika D wyzwalanego nie zboczem, lecz
poziomem. W czasie trwania na wejściu
zegarowym stanu wysokiego, wyjście Q
powtarza stany logiczne wejścia D. W
momencie zmiany na wejściu zegarowym stanu
wysokiego na niski następuje "zatrzaśnięcie"
(zapamiętanie) stanu wejścia D sprzed tej
zmiany. Typowym zastosowaniem przerzutnika
typu Latch jest zapamiętanie chwilowego stanu
szyny danych w celu np. zobrazowania na
wyświetlaczu. Dowolny przerzutnik tego typu
charakteryzuje się mniejszą odpornością na
zakłócenia od dowolnego przerzutnika
wyzwalanego zboczem.
87) Rejestry:
a) Przesuwające:
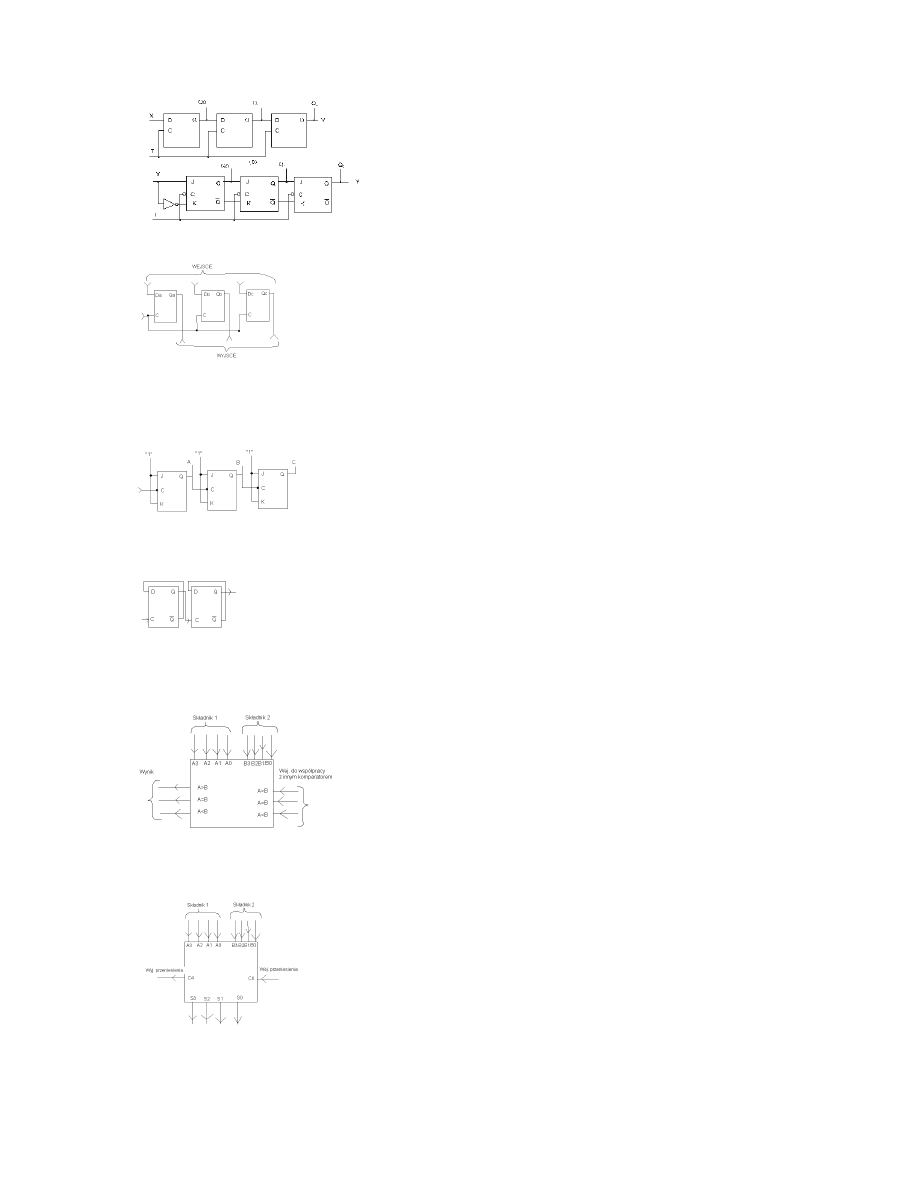
b) Równoległy:
88)Liczniki:
a) Licznik asynchroniczny dwójkowy:
b) Licznik dwójkowy z przerzutników D:
89) Układy arytmetyczne:
a) układ porównywania dwóch liczb:
b) Sumator równoległy:
90) Układy komutacyjne: a) Multiplekser: jest
układem komutacyjnym (przełączającym),
posiadającym k wejść informacyjnych (zwanych
też wejściami danych), n wejść adresowych
(sterujących) (zazwyczaj k=2
n
) i jedno wyjście
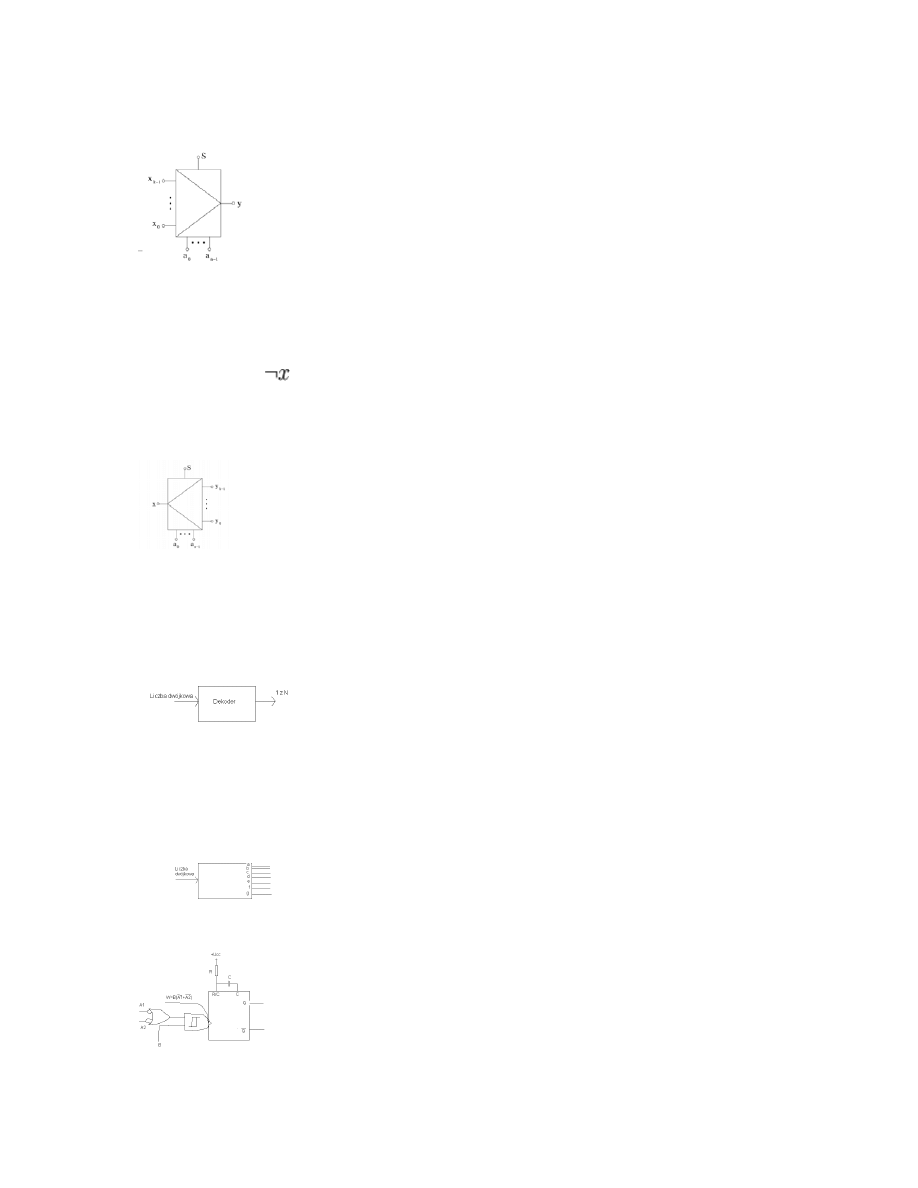
y. Posiada też wejście sterujące działaniem
układu oznaczane S (ang. strobe) lub e (ang.
enable).
Demultiplekser jest układem posiadającym
jedno wejście x, n wejść adresowych, oraz k
wyjść (zazwyczaj k=2
n
). Jego działanie polega
na połączeniu wejścia x do jednego z wyjść y
i
.
Numer wyjścia jest określany przez podanie
jego numeru na linie adresowe a
0
... a
n-1
. Na
pozostałych wyjściach panuje stan zera
logicznego. W praktyce spotykane są jedynie
demultipleksery w wyjściach zanegowanych,
czyli na wybranym wyjściu jest stan
a na
wszystkich pozostałych 1 logiczna. Jeśli na
wejście strobujące (blokujące) S (ang. strobe)
podane zostanie logiczne zero, to wyjścia y
i
przyjmują określony stan logiczny (zwykle
zero), niezależny ani od stanu wejścia x, ani
wejść adresowych.
DEKODER należy do klasy układów
kombinacyjnych. Jest to układ posiadający n
wejść oraz k wyjść (k=2
n
). Jego działanie
polega na zamianie naturalnego kodu binarnego
(o długości n), lub każdego innego kodu, na kod
"1 z k" (o długości k). Działa odwrotnie do
enkodera, tzn. zamienia kod binarny na jego
reprezentacji w postaci wybranego tylko
jednego wyjścia. W zależności od ilości wyjść
nazywa się go dekoderem
1zN.
Transkoder: Układ cyfrowy służący do zamiany
dowolnego kodu cyfrowego (poza kodem 1zN)
na inny, dowolny kod cyfrowy (również z
wyjątkiem kodu 1zN). Przykładem takiego
układu może być układ zamieniający naturalny
kod binarny na kod wyświetlacza
siedmiosegmentowego (niektórzy mylnie
nazywają ten układ 'dekoderem').
91) Układy casowe:
Przerzutnik monostabilny:
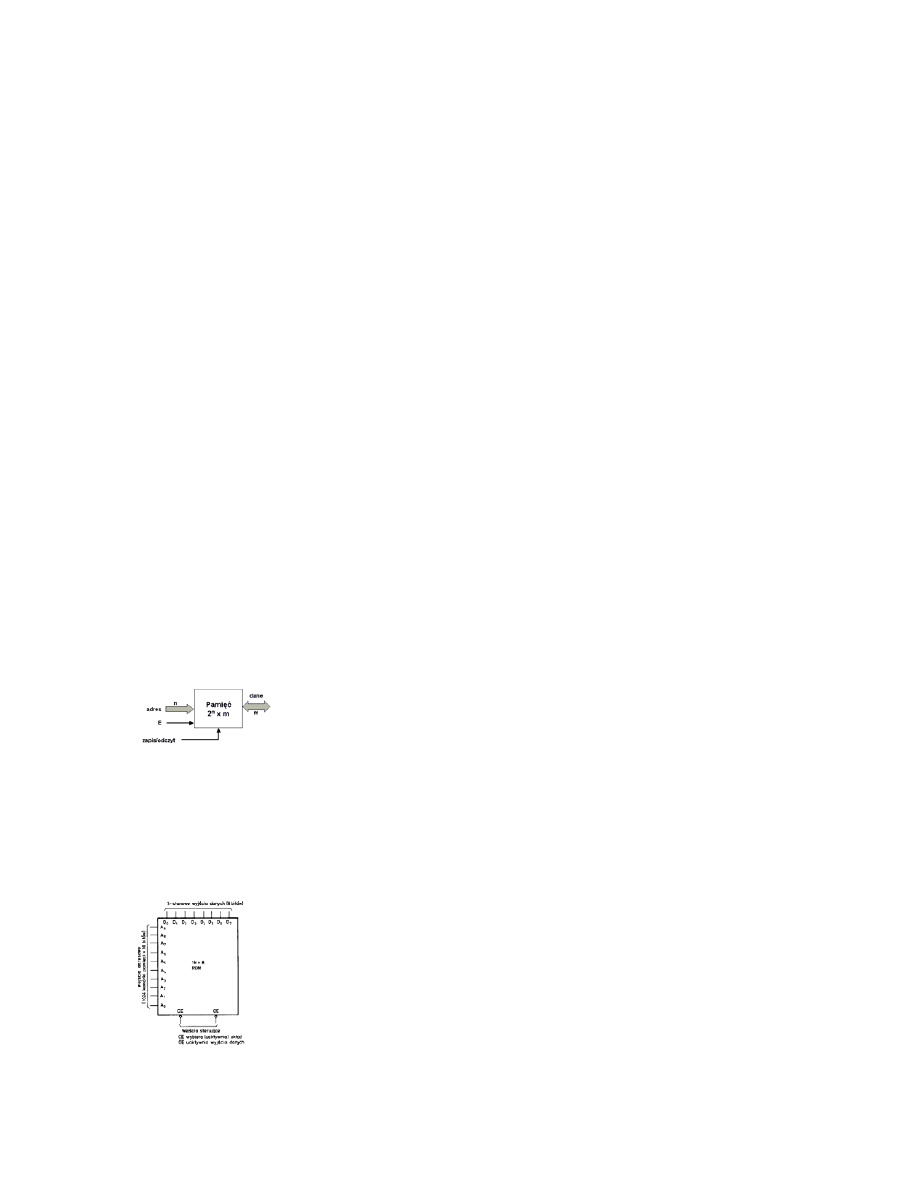
92) Pamięci cyfrowe:
Pamięć cyfrowa – układ elektroniczno-
mechaniczny przeznaczony do przechowywania
informacji w postaci słów binarnych.
Podstawowym zastosowaniem pamięci są
komputery (pamięć komputerowa), choć
wykorzystywane są w praktycznie wszystkich
bardziej zaawansowanych urządzeniach, od
automatycznych pralek, radioodbiorników,
cyfrowych aparatów fotograficznych, przez
samochody i roboty aż po sondy kosmiczne,
systemy naprowadzania rakiet i kontynentalne
systemy obrony powietrznej. W zależności od
konstrukcji i zastosowania można je podzielić
na pamięci dostępie swobodnym – np. pamięć
RAM, ROM czy dysk twardy lub
sekwencyjnym – np. taśma magnetyczna. Inną
metodą jest podział na pamięci ulotne –
przechowujące informację tylko kiedy są
zasilane oraz nieulotne, przechowujące dane
również po wyłączeniu zasilania. W zależności
od technologii w której są wykonane mogą to
być pamięci półprzewodnikowe (np. RAM,
EEPROM), magnetyczne (dysk twardy, taśma
magnetyczna), optyczne (dysk CDROM, taśma
filmowa) i inne. Każda technologia posiada
swoje wady i zalety, w szczególności
podstawowe parametry typu czas dostępu,
strumień danych, pojemność maksymalna, cena
za jednostkę pojemności itp.
RAM - Układy pamięci RAM zbudowane są z
elektronicznych elementów, które mogą
zapamiętać swój stan. Dla każdego bitu
informacji potrzebny jest jeden taki układ. W
zależności od tego czy pamięć RAM jest tak
zwaną statyczną pamięcią (SRAM-Static
RAM), czy dynamiczną (DRAM-Dynamic
RAM) zbudowana jest z innych komponentów i
soje działanie opiera na innych zasadach.
Pamięć SRAM jako element pamiętający
wykorzystuje przerzutnik, natomiast DRAM
bazuje najczęściej na tzw. pojemnościach
pasożytniczych (kondensator). DRAM
charakteryzuje się niskim poborem mocy,
jednak związana z tym skłonność do
samorzutnego rozładowania się komórek
sprawia, że konieczne staje się odświeżanie
zawartości impulsami pojawiającymi się w
określonych odstępach czasu. W przypadku
SRAM, nie występuje konieczność odświeżania
komórek lecz okupione jest to ogólnym
zwiększeniem poboru mocy. Pamięci SRAM, ze
względu na krótki czas dostępu są często
stosowane jako pamięć podręczna. Wykonane w
technologii CMOS pamięci SRAM mają
mniejszy pobór mocy, są jednak stosunkowo
drogie w
produkcji.
ROM -
W pamięciach nieulotnych typu ROM
umieszczone są informacje stałe. ROM jest
najbardziej niezawodnym nośnikiem informacji
o dużej gęstości zapisu. Zapis informacji
dokonuje się w procesie produkcji lub podczas
ich programowania. W pamięci ROM zapisuje
się ustawienia BIOSu. Pamięci typu ROM
przeznaczone są głównie do umieszczania w
nich startowej sekwencji instrukcji,
kompletnych programów obsługi sterowników i
urządzeń mikroprocesorowych, także
ustalonych i rzadko zmienianych danych
stałych.
Wyszukiwarka
Podobne podstrony:
Grishkova kompetenciya 16 id 19 Nieznany
IMG 16 id 211127 Nieznany
Cwiczenie 16 id 99163 Nieznany
IMG 16 id 211079 Nieznany
ex22ke 16 id 166201 Nieznany
Egzamin 16 id 151516 Nieznany
msr 16 id 309963 Nieznany
Matematyka 16 id 283104 Nieznany
B 16 id 74814 Nieznany (2)
IMG 16 id 211041 Nieznany
IMG 16 id 211156 Nieznany
choczaj t 16 id 114263 Nieznany
7 16 id 44735 Nieznany
4 16 id 36977 Nieznany (2)
Lab 16 id 257444 Nieznany
Bud wyk 16 id 93928 Nieznany
IMG 16 id 211102 Nieznany
więcej podobnych podstron