Pomiary grawimetryczne.
(przyśpieszenia siły ciężkości)
Jednostki: 1 cm· sek
-2
= 1 gal (gal)
10
-3
cm· sek
-2
= 1 mgal (miligal)
10
-6
cm· sek
-2
= 1
gal (mikrogal)
Średnia wartość przyspieszenia ziemskiego
g
981 gal
Rodzaje pomiarów grawimetrycznych
1. Bezwzględne
- wahadło fizyczne
- balistyczne
2. Względne
- wahadłowe
- grawimetr strunowy
- grawimetr statyczny
1.Pomiary bezwzględne
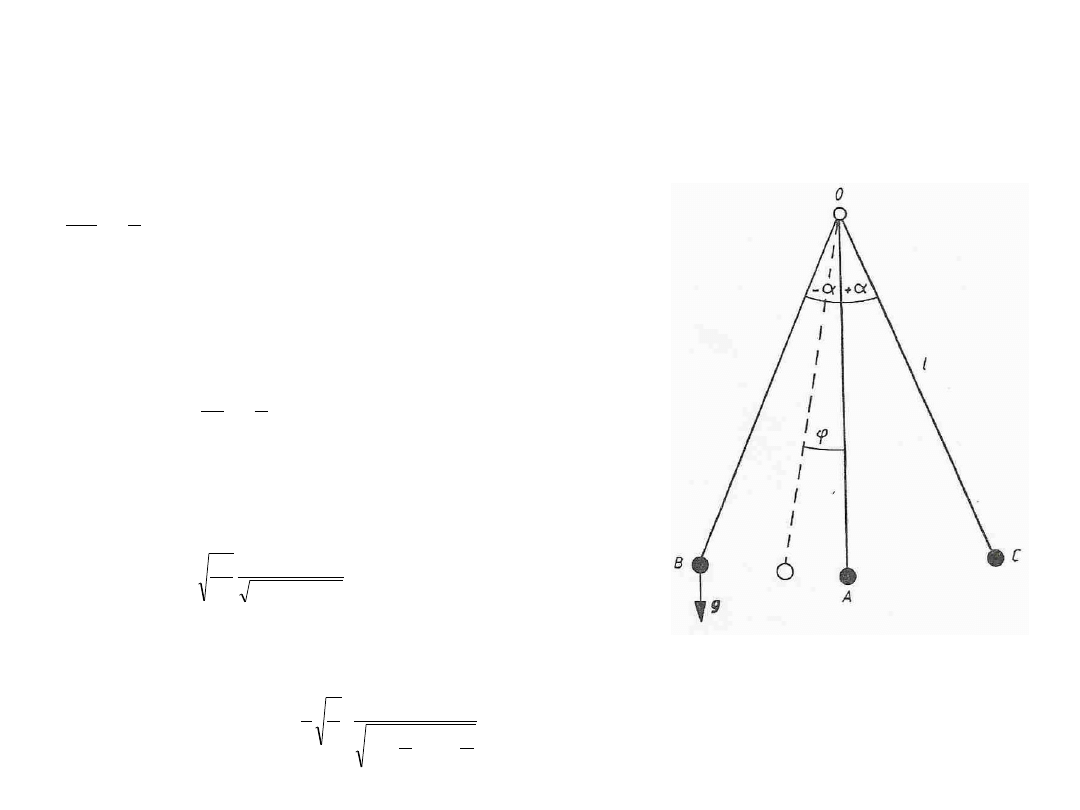
a) pomiary bezwzględne z wykorzystaniem wahadła fizycznego
Ruch wahadła matematycznego ujęty jest równaniem różniczkowym
sin
2
2
l
g
dt
d
(2.1)
Przy czym kąt
jest wychyleniem z położenia
równowagi. W położeniu granicznym, gdzie
=
, a
t=0 oraz d
/dt=0, z równania (2.1) wynika, że
cos
cos
2
l
g
dt
d
(2.2)
Przy czym zgodnie z oznaczeniami na rys.,
jest amplitudą drgań wahadła. Dalej
uzyskuje się:
cos
cos
2
d
g
l
dt
(2.3)
Poprzez scałkowanie w granicach od -
do+
znajduje się okres wahadła matematycznego
0
2
2
0
2
sin
2
sin
2
1
d
g
l
dt
T
T
(2.4)
W nowoczesnych aparatach amplituda nie przekracza kilkunastu minut i dlatego
...
2
sin
64
9
2
sin
2
1
1
4
2
g
l
T
(2.5)
Z błędem nie większym niż10
-10
T
można przyjąć, że półokres wahań
2
16
1
1
g
l
T
Wielkość zdefiniowana wzorem Christana Huyghensa (1629-1695):
g
l
T
0
Odpowiada okresowi wahań dla
= 0. Stąd przyspieszenie siły ciężkości
2
0
2
T
l
g
(2.6)
Okres zredukowany wahadła do „zerowej amplitudy” otrzymuje się w myśl wzoru
2
0
16
1
1
T
T
(2.7)

Wykorzystywane do pomiarów grawimetrycznych wahadło fizyczne ma w przybliżeniu
taki sam okres wahań, jak wahadło matematyczne o długości
Ma
J
a
l
0
(2.8)
zwanej długością zredukowana wahadła fizycznego. Wielkość a oznacza odległość
środka obrotu wahań od środka ciężkości wahadła fizycznego, a J
0
– moment
bezwładności masy M wahadła względem osi przechodzącej przez jego środek
ciężkości
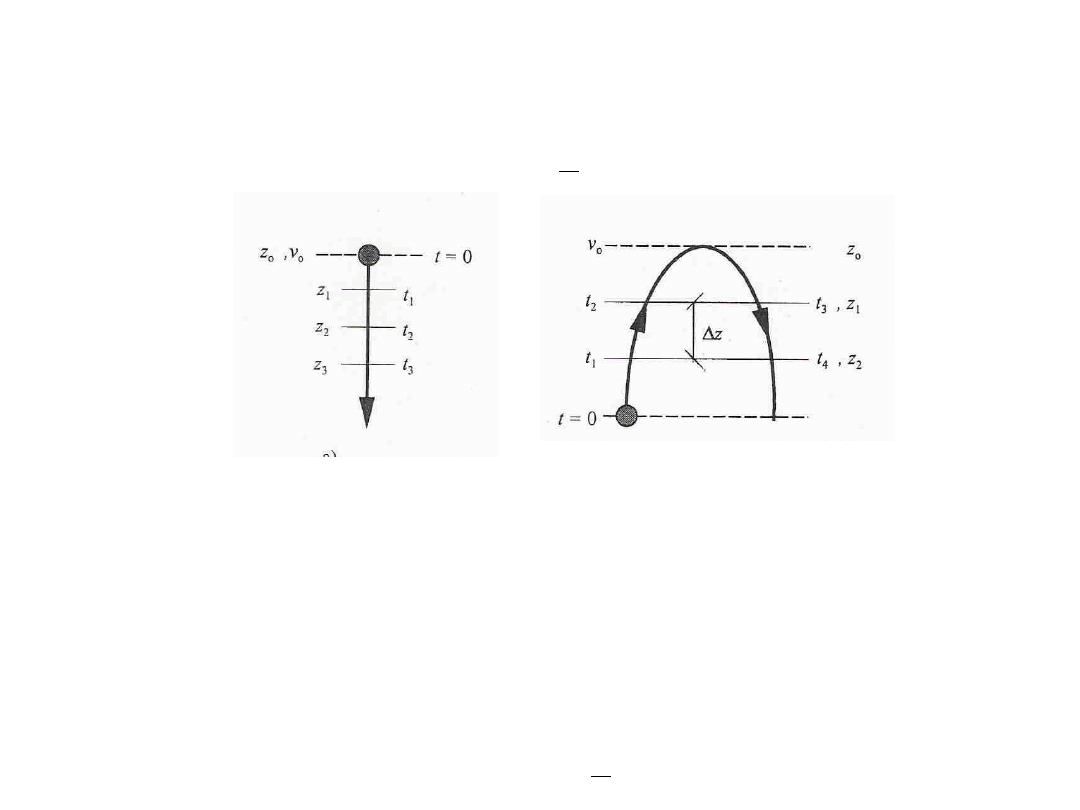
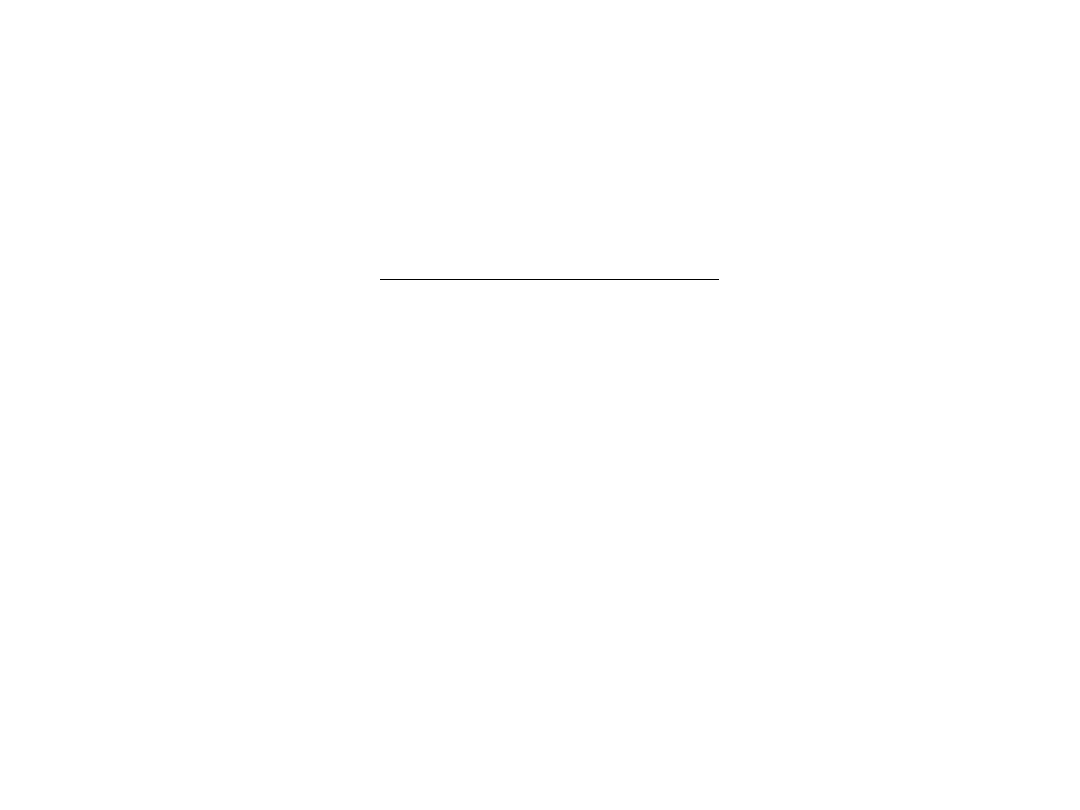
Metoda swobodnego spadku ciał
Równanie swobodnego spadku ciał można zapisać w znanej z fizyki postaci
2
0
0
2
t
g
t
v
z
z
Równanie to ma swoje źródło w równaniu różniczkowym drugiego rzędu względem czasu
o postaci , wynikającego z równości . Ponieważ g = const., to w wyniku
pierwszego scałkowania otrzymalibyśmy .
A zatem z
0
i v
0
reprezentują stałe całkowania (położenie początkowe z
0
i prędkość
początkowa v
0
w momencie t=0). Dostatecznie precyzyjne pomierzenie tych parametrów
początkowych jest niewykonalne. Z tego powodu drogę i interwały czasu mierzy się
pomiędzy co najmniej trzema punktami na torze spadającego ciała. Można w takim
przypadku napisać dwa równania: jedno dla z
2
– z
1
i drugie dla z
3
– z
1
, lub ogólnie dla
większej liczby interwałów pomiarowych:
g
z
mg
z
m
gt
v
z
0
2
1
1
1
1
2
t
t
g
t
t
v
z
z
i
i
i
Z układu takich równań można albo wyeliminować v
1
, albo potraktować dodatkowo z
1
i v
1
jako niewiadome, gdy rozporządzamy nadliczbowymi obserwacjami z
i
. Przy takim
podejściu należałoby uwzględnić zależność pomiędzy wielkościami obserwowanymi z i t.
W najprostszym przypadku trzech punktów obserwacji wzdłuż drogi spadku
otrzymalibyśmy następujący związek:
2
3
1
2
1
3
1
3
1
2
1
2
1
3
2
t
t
t
t
t
t
t
t
z
z
t
t
z
z
g
1. – komora próżniowa, 2 – ruchomy pryzmat, 3 – laser, 4 – urządzenie kompensujące
drgania, 5 – licznik lub oscyloskop, 6 – silnik napędzający urządzenie wyrzucające
pryzmat
Dokładność
współczesnych
bezwzględnych
pomiarów
stacjonarnych przyspieszenia siły
ciężkości szacuje się w granicach
jednego
mikrogala.
Pomiary
aparatami przenośnymi są mniej
dokładne. Można ich błędy szacować
na około ±0,002÷0,005 mgala.
Grawimetry statyczne
Do pomiarów względnych przyśpieszenia siły ciężkości stosuje się powszechnie grawimetry
statyczne.
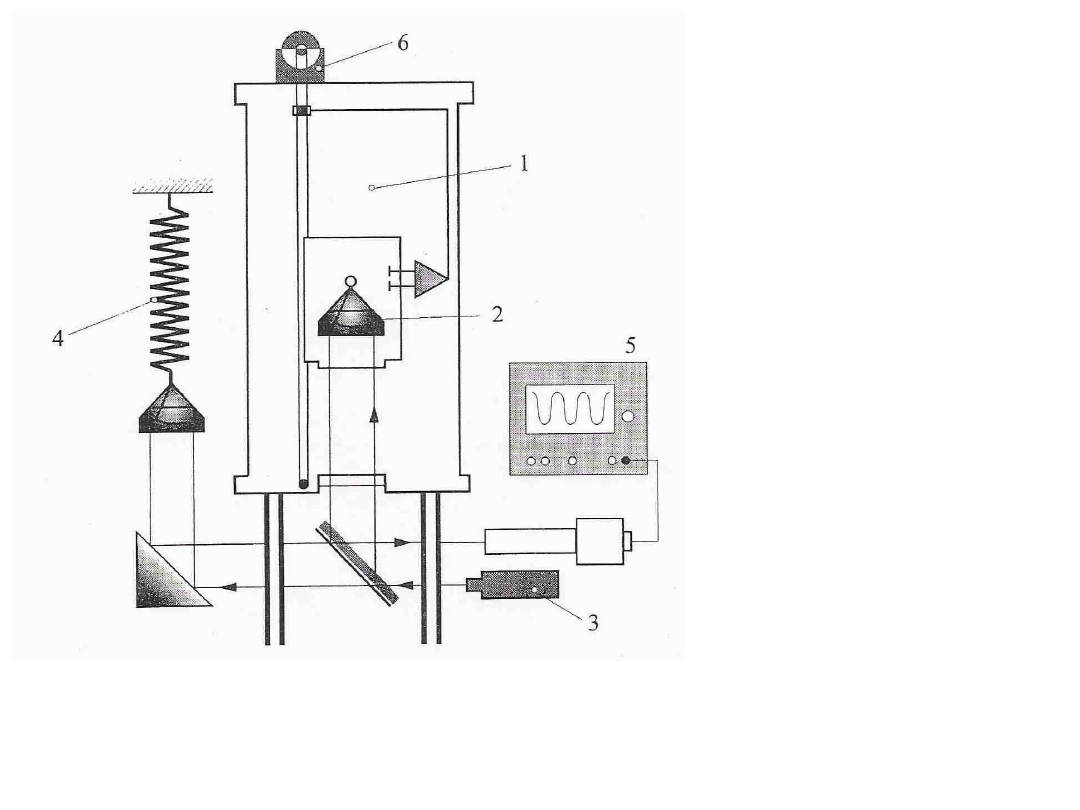
Model grawimetru statycznego
Najprostszy model grawimetru statycznego
stanowić może pionowa sprężyna obciążona
stałą masą. Zmiany przyśpieszenia siły
ciężkości powodują zmienność siły
przykładanej do tej sprężyny i tym samym
zmiany jej długości. W pewnym zakresie
zmiany te będą miały charakter liniowy.
Równanie równowagi statycznej naszego
modelu ma następującą postać:
0
l
l
k
mg
przy czym k jest pewna stałą wartością charakterystyczną dla danej sprężyny, l – to
długość sprężyny obciążonej, zaś l
0
– nie obciążonej. Poprzez różniczkowanie tego
równania można dojść do związku liniowego pomiędzy małą zmianą przyspieszenia
g i
zmianą długości sprężyny
l.
l
m
k
g
l
l
l
g
g
0
albo
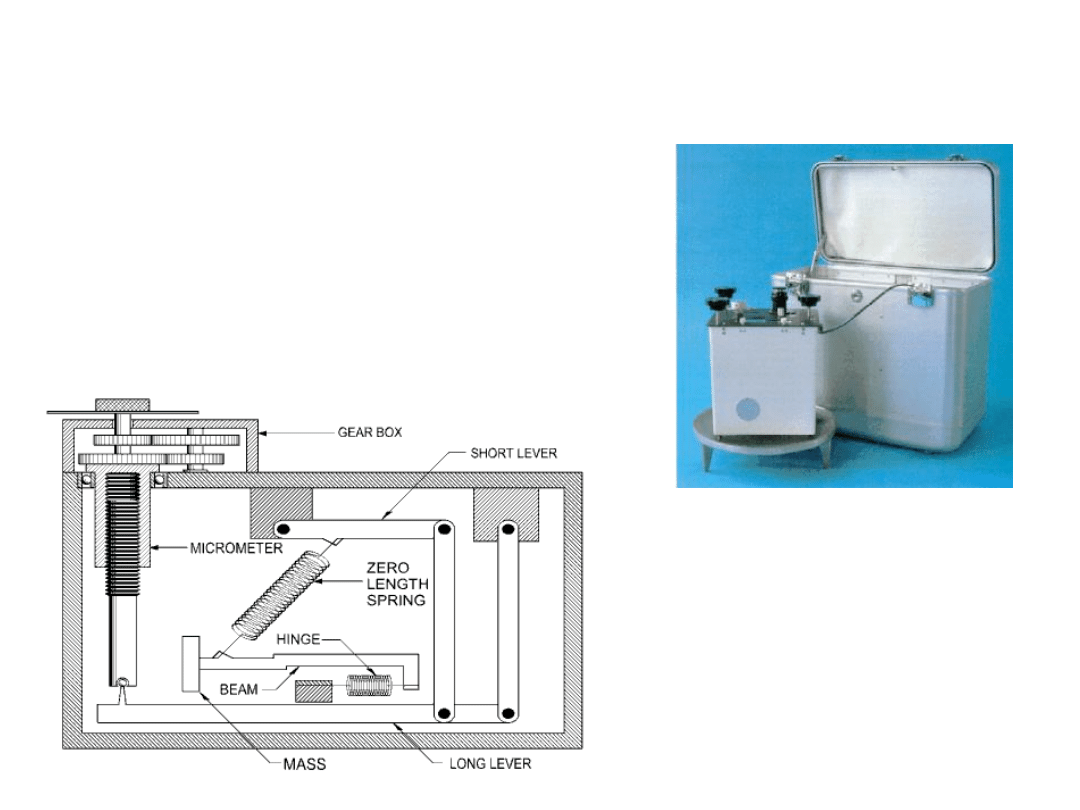
We współczesnych grawimetrach statycznych znalazł zastosowanie inny, bardziej
złożony system pomiarowy
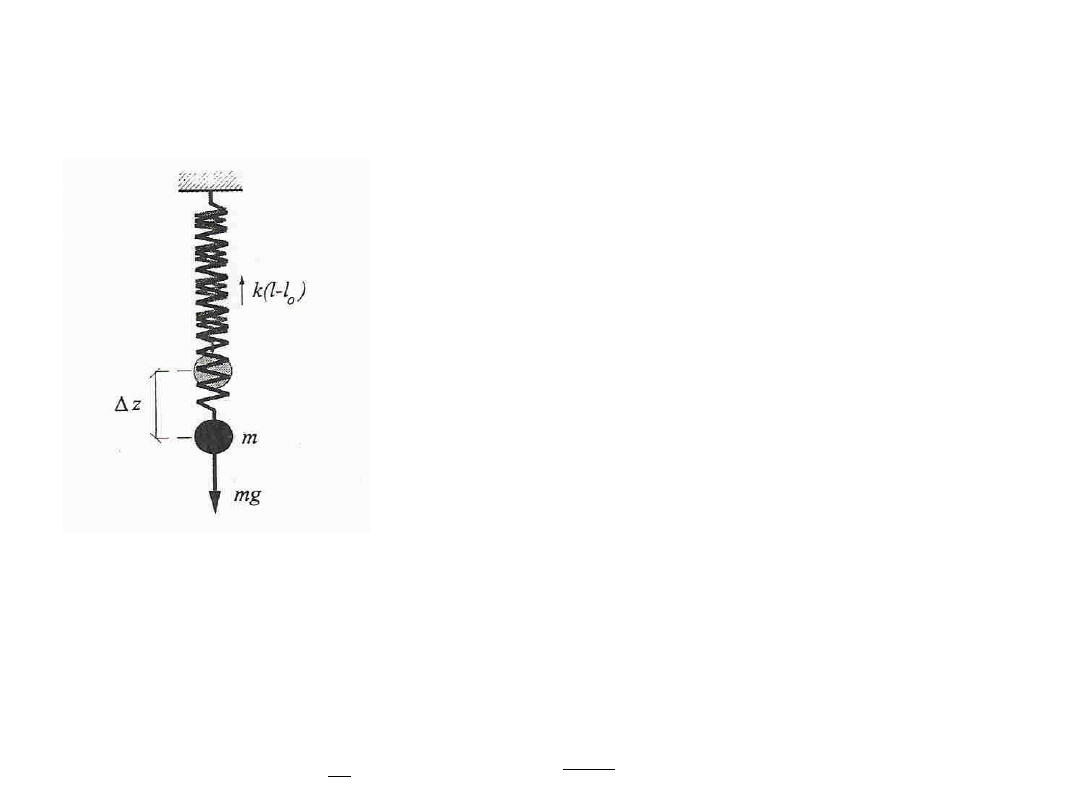
Schemat systemu mierzącego grawimetru
Rysunek przedstawia schemat tego systemu.
Pozioma ‘dźwignia’ o długości a, obciążona
masą m, może się obracać wokół osi O ( z
reguły os tę stanowi pozioma ‘nić torsyjna’).
Na skutek zmiany przyśpieszenia siły
ciężkości dźwignia wykonuje pewien obrót
wokół osi O. Za pomocą sprężyny pomiarowej
można doprowadzić dźwignię do wyjściowego
położenia poziomego. Następuje to w
większości konstrukcji poprzez pochylenie
systemu mierzącego grawimetru.
Śruba mikrometryczna, połączona ze sprężyną pomiarową, umożliwia pomiar przemieszenia
dźwigni, będącego funkcją kata obrotu dźwigni (nachylenie systemu mierzącego). Taka
metoda pomiaru (odczytywania grawimetru), polegająca na doprowadzeniu systemu
mierzącego do pozycji wyjściowej (poziomej) poprzez nachylanie, nosi nazwę odczytu przez
zerowanie (metoda zerowania). Na ogół w pewnym zakresie zmian przyspieszenia istnieje
prawie liniowa zależność pomiędzy katem obrotu dźwigni i zmianą przyspieszenia.
Równanie równowagi statycznej systemu przedstawionego na rysunku ma postać:
cos
mga
Związek ten wyraża równość momentu siły mg o ramieniu a i momentu skręcającego nici
torsyjnej, przy czym
jest stałym współczynnikiem skręcenia nici torsyjnej,
-
wyjściowym katem skręcenia nici, zaś
to kąt wychylenia dźwigni. Na podstawie tego
równania uzyskuje się związek pomiędzy
g i
, który jest liniowy dla
bliskich zera.
g
a
ma
g
Równania te mają w mniejszym bądź większym stopniu zastosowanie do wszystkich
typów grawimetrów statycznych.
Sprężyny metalowe, zazwyczaj inwarowe, wymagają dobrej izolacji termicznej grawimetru
(±0,001ºC), cechują się małym współczynnikiem termoelastycznym (0÷±0,05x10
-6
/1 ºC),
małą tzw. elastycznością wtórną, natomiast znaczną liniową rozszerzalnością termiczną.
Sprężyny kwarcowe mają duży współczynnik termoelastyczny, zaś bardzo małą liniową
rozszerzalność termiczną, są niemagnetyczne, mają własności higroskopijne, są lekkie mało
podatne na zjawisko histerezy oraz odkształcenia elastyczne na skutek zmian ciśnienia.
W efekcie takich własności grawimetry ze sprężynami metalowymi wymagają, oprócz
termostatów, także szczelnych obudów, chroniących systemy pomiarowe przed zmianami
ciśnienia, a także osłon antymagnetycznych. W związku z tym bywają stosunkowo ciężkie.
Jednakże za ich pomocą osiąga się wysokie dokładności pomiaru, z reguły lepsze niż ±0,02
mgala. Ponadto grawimetry metalowe mają bardzo małe dryfty.
Schemat różnych systemów mierzących grawimetrów

Grawimetry kwarcowe są bardzo lekkie i niewielkiego rozmiaru,a więc wygodne w
użyciu. Niestety charakteryzują się znacznymi wielkościami dryftu, co czyni pomiary
bardziej uciążliwymi. Muszą być bardzo dobrze zabezpieczone przed wpływami
wilgotności. Mniej wrażliwe na wpływy zmian temperatury mogą nie być wyposażone w
termostaty utrzymujące z dużą dokładnością temperaturę wewnętrzną. Są z reguły
wyposażone w bimetaliczne kompensatory temperatury. Zapewniają nieco niższe
dokładności pomiarów niż grawimetry ze sprężynami metalowymi (około ±0,05mgala).
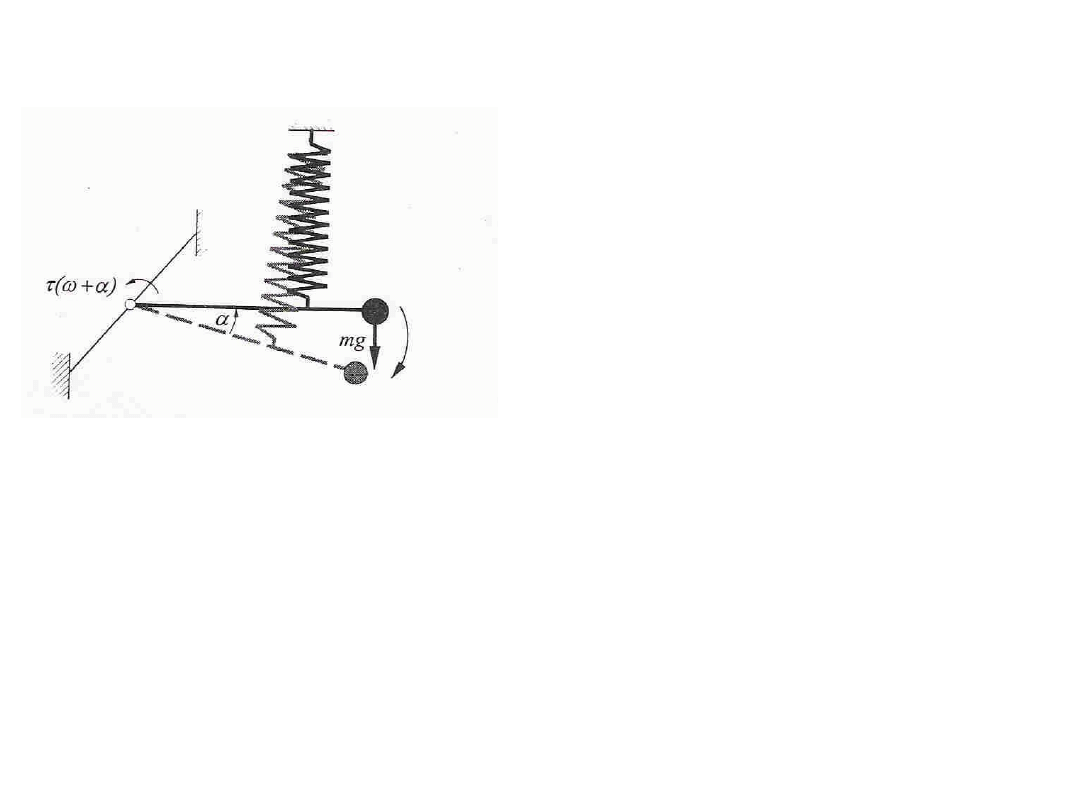
Zasady astatyzacji. Przez astatyzację systemu mierzącego grawimetru rozumie się pewien
mechaniczny zabieg powodujący zwiększenie czułości tego systemu. Reakcja systemu
mierzącego, z poziomą dźwignią o długości a, na zmiany przyśpieszenia jest określona w
równaniu równowagi iloczynem mga z jednej strony, zaś parametrami sprężyny
i
z
drugiej strony.Z wzajemnej relacji tych wielkości wynika określona wielkość reakcji
urządzenia na zmiany przyśpieszenia, czyli czułość grawimetru. Jeśli do układu będącego
w równowadze, zostanie wprowadzony dodatkowy element, np.. w postaci dodatkowego
momentu obrotowego (dodatniego bądź ujemnego), reakcja urządzenia na zmiany
przyspieszenia okaże się zmieniona. W procesie astatyzacji chodzi o takie zakłócenie
pierwotnego stanu równowagi, aby uzyskać możliwie największą czułość urządzenia, nie
doprowadzając go jednakże do stanu równowagi chwiejnej ani obojętnej. I tak na
przykład systemy mierzące z pionową lub ukośna sprężyną i poziomą dźwignią astatyzuje
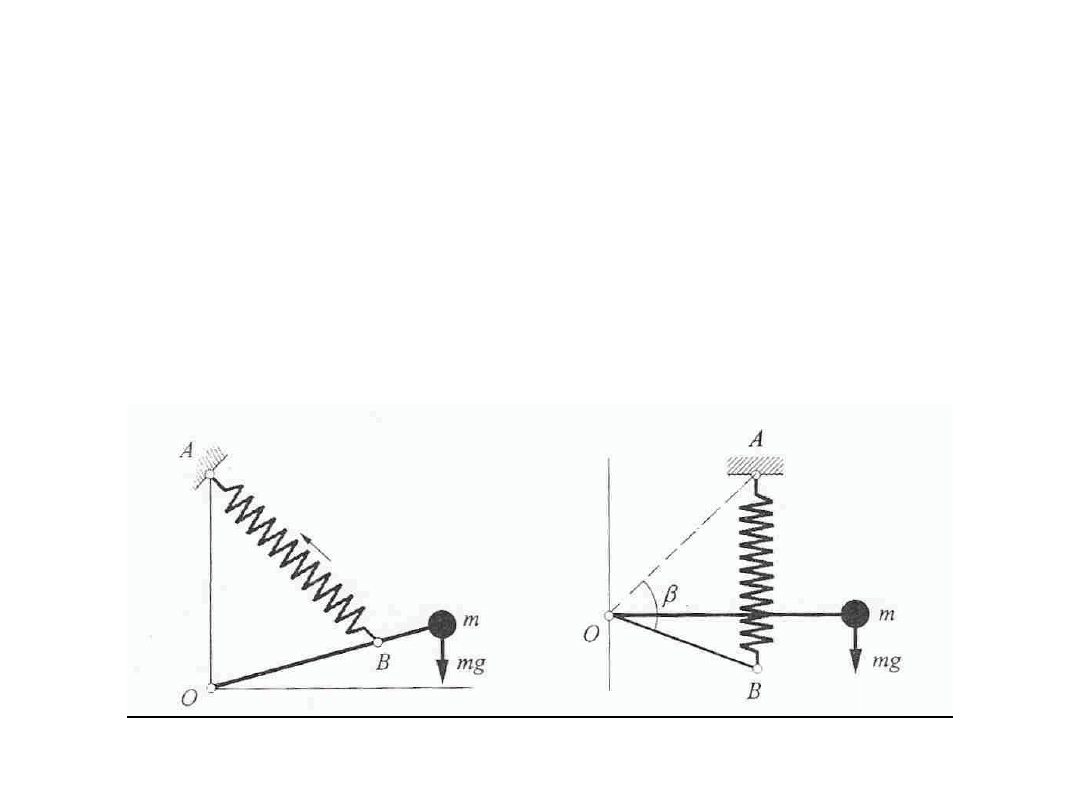
się poprzez odpowiedni dobór parametrów geometrycznych systemu mierzącego.
W przypadku systemu przedstawionego schematycznie na rysunku równanie równowagi
przy poziomej dźwigni ma postać:
0
0
sin
n
l
l
k
mga
Wyrażenie nsin
0
to ramię siły k(l-l
0
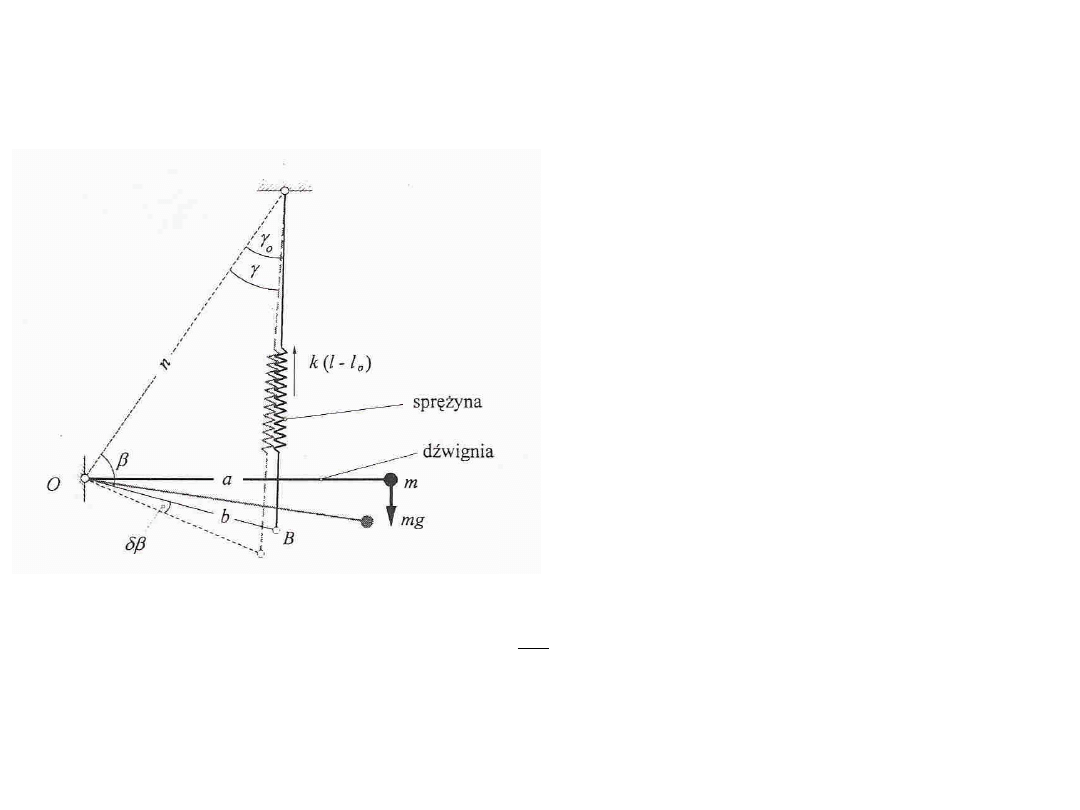
). Po
wychyleniu dźwigni o kąt
równanie to
zmieni się na
sin
cos
0
n
l
l
k
mga
Zmieniając sin
0
i sin
przez odpowiednie funkcje
i
+
, można łatwo dojść do
następującej relacji
tan
g
dg
d
z której wynika, że największą czułość grawimetru (
max
) osiągniemy, gdy
=90º. Zatem
w konstrukcjach, działających na zasadzie zilustrowanej schematem przedstawionym na
rysunku. Astatyzację można uzyskać poprzez taki dobór punktów zaczepienia sprężyny i
dźwigni, aby kat
był zbliżony do kąta prostego.
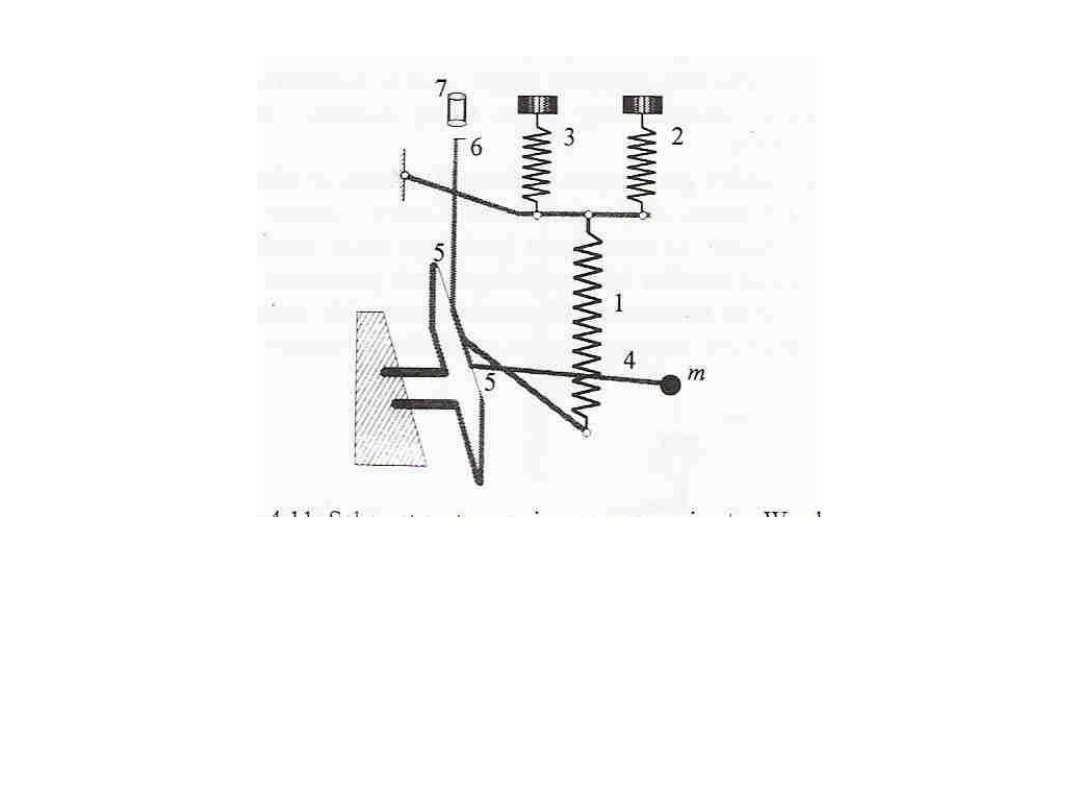
Schemat systemu mierzącego grawimetru Wordena
1. sprężyna pomiarowa (główna), 2 –sprężyna i śruba odczytu,3-sprężyna i śruba zmian
zakresu pomiarowego, 4-dźwignia pozioma obciążona masą, 5-nić torsyjna, 6-wskaźnik
położenia dźwigni, 7-lunetka odczytowa
Relative Spring Gravimeters
Advantages
• Simple To Operate
• Small/Lightweight
• Inexpensive
Problems
• Drifts
• Tares
• Calibration

Cechowanie grawimetrów
Najpowszechniej stosuje się dwie metody cechowania grawimetrów statycznych:
1.) za pomocą baz grawimetrycznych
2.) metoda nachylania
Dryft grawimetrów
działanie grawimetrów statycznych, polegające na odkształceniu elementów
sprężystych, można objaśnić na podstawach teorii elastyczności i reologii. Zjawisko
dryftu systemów mierzących grawimetrów jest efektem nakładania się dwóch efektów:
odstępstwa w zachowaniu się materiału,z którego sporządzono system mierzący, od
zasad teorii Hooka i pewnych zjawisk reologicznych, takich jak pełzanie i płynięcie
materiału.
Wpływ zmiany temperatury na rozszerzalność liniową
t
l
l
1
0
Wpływ mian temperatury na zmianę współczynnika elastyczności sprężyny
(właściwe zjawiska termoelastyczne)
t
1
0
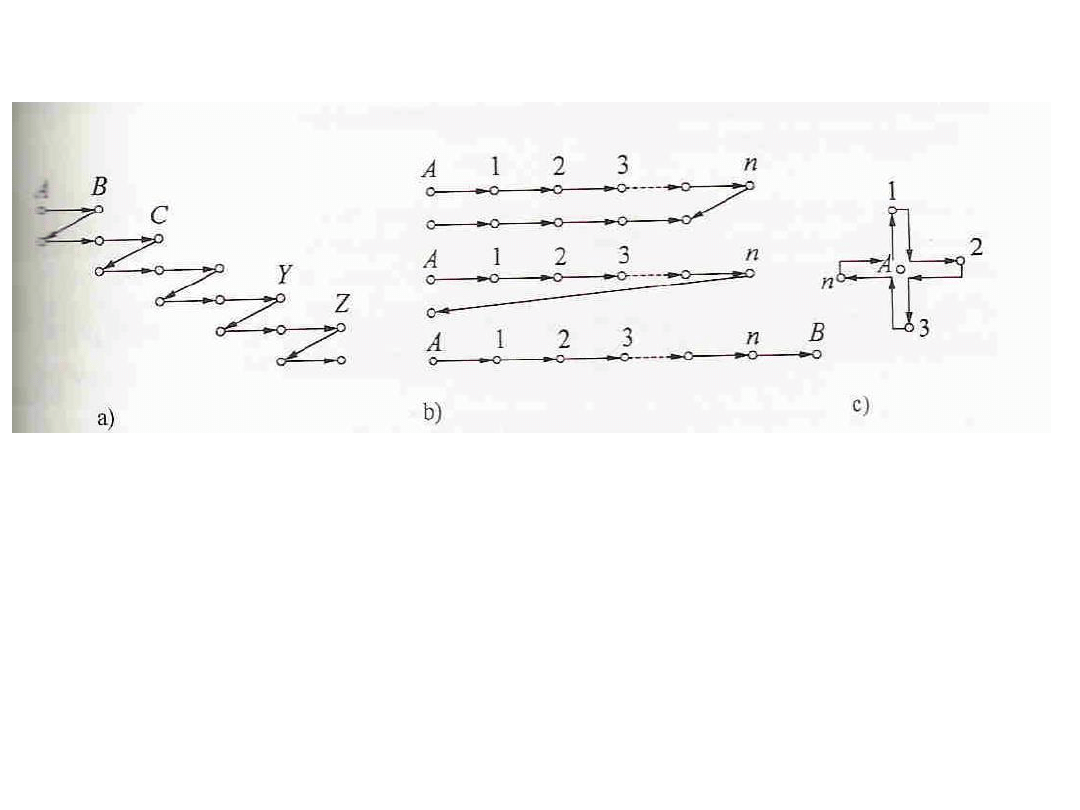
Różne sposoby pomiaru grawimetrami
sposób łańcuchowy
sposób profilowy
sposób gwiazdowy

Poprawki do pomierzonych wartości przyspieszenia siły ciężkości
1. Poprawka ze względu na zmiany przyspieszenia siły ciężkości spowodowana
przyciąganiem Księżyca i Słońca.
Poprawka spowodowana jest zjawiskiem pływów skorupy ziemskiej. Zjawisko pływów i
jego wpływ na pomiary geodezyjne zostaną omówione w dalszej części wykładów.
mgal
z
z
h
k
g
s
k
p
3
1
2
cos
0379
,
0
3
1
2
cos
0825
,
0
2
3
1
gdzie: Δg
p
– poprawka pływowa do pomierzonej wartości przyspieszenia siły ciężkości
k, h – liczby Love’a
z
k
– topocentryczna odległość zenitalna Księżyca
z
s
– topocentryczna odległość zenitalna Słońca
19
,
1
15
,
1
2
3
1
h
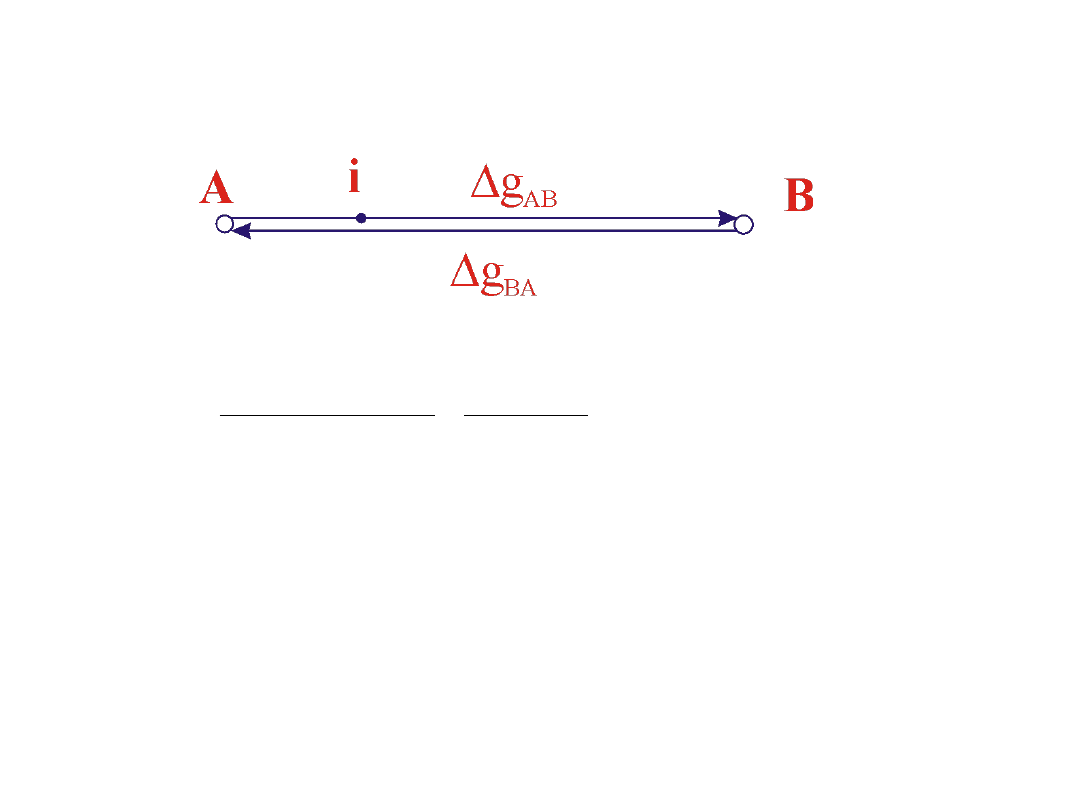
2. Poprawka ze względu na dryft grawimetru
Pomiar grawimetryczny wykonany „tam” i „z powrotem”
BA
AB
g
g
g
Chód:
P
AB
t
AB
P
B
P
A
t
A
t
B
t
t
g
T
T
T
T
g
n
gdzie:
P
BA
P
B
P
A
t
AB
t
A
t
B
t
T
T
t
T
T
A
i
pom
i
popr
i
T
T
h
g
g
Powyższe dwie poprawki do pomierzonych wartości przyspieszenia są najbardziej istotne.
Przy pomiarach o dokładności rzędu 1μgal wprowadzamy szereg innych poprawek między
innymi spowodowanych zmianami ciśnienia atmosferycznego, zmianami poziomu wody
gruntowej, wilgotności gruntu itp..
Wyszukiwarka
Podobne podstrony:
Geodezja wyższa Rozdział IVa
Geodezja wyzsza Rozdzial IIIa i Nieznany
Geodezja wyzsza Rozdzial Va id Nieznany
Geodezja wyższa Rozdział II 2(1)
Geodezja wyższa Rozdział IVa
Geodezja wyzsza Rozdzial IIIa i Nieznany
Spr7, Gepdezja nst KPSW - Bydgoszcz, Semestr 5, GW, gw, GW, wyższa, geodezja wyższa, cw8
Elipsoida geoida, geodezja inżynierjna, inżynieryjna kolo, FiT, geodezja wyzsza
ćw 3 blacha, gik, semestr 3, Geodezja wyższa, ćwiczenia Tomasz Blachowicz
ćw 2 blacha, gik, semestr 3, Geodezja wyższa, ćwiczenia Tomasz Blachowicz
GEODEZJA WYzSZA-kolokwium, geo wyższa
sciaga wyzsza sem2, Geodezja Wyższa(1)
spr nr 7-1, Studia, geodezja wyższa
stabilizacja, gik, semestr 4, Wyższa, Geodezja Wyższa, osnowa wysokosciowa
Geodezja wyższa i astronomia wykłady
więcej podobnych podstron