Sieci wymiany danych
Z
Elektronika
Instrukcja
do
laboratorium
Ćw. 6
dr inż. Mirosław Mizan
dr inż. Leszek Jarzębowicz
Katedra Inżynierii Elektrycznej
Transportu
Gdańsk, 2010
Przetworniki elektroniczne do
pomiaru wielkości mechanicznych:
enkodery, dalmierze laserowe,
optyczne czujniki zbliżeniowe

2
Elektronika
CEL ĆWICZENIA
• zapoznanie się z budową i zasadą działania enkodera przyrostowego i absolutnego,
• zapoznanie się z budową i zasadą działania dalmierza laserowego,
• zapoznanie się z budową i zasadą działania optycznego czujnika zbliżeniowego.
1. WSTĘP
Współczesne układy pomiaru wielkości mechanicznych powszechnie wykorzystują
przetworniki elektroniczne, zamieniające mierzoną wielkość mechaniczną – prędkość linio-
wą, odległość, położenie – na wielkość elektryczną, z reguły w postaci analogowego sygnału
napięciowego lub prądowego, albo sygnału binarnego: szeregowego (ciąg impulsów) lub
równoległego.
Enkodery
Precyzyjne enkodery są zazwyczaj przetwornikami optoelektronicznymi, choć sama
nazwa „enkoder” obejmuje również inne rodzaje przetworników (np. magnetyczne). Enkode-
ry dzielą się na przyrostowe oraz absolutne. Drugie służą do pomiaru absolutnego kąta poło-
żenia, pierwsze umożliwiają określenie zmiany kąta położenia względem pewnego położenia
odniesienia.
Enkodery przyrostowe
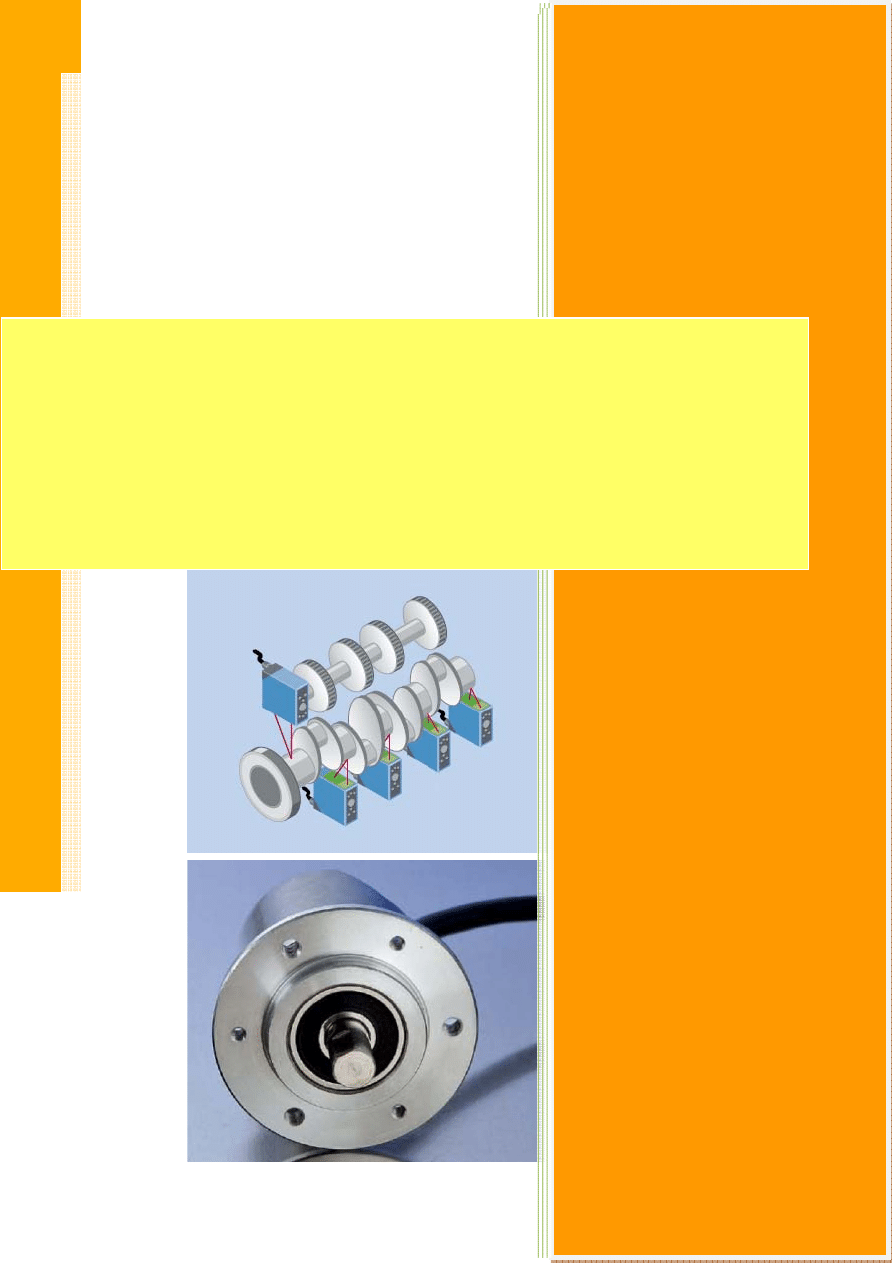
Podstawowymi elementami optoelektronicznych enkoderów przyrostowych są: tarcza
oraz elementy optoelektroniczne. Tarcza, osadzona na wale enkodera, wykonana jest w pre-
cyzyjnych enkoderach najczęściej ze szkła. Na tarczy naniesione są nieprzezroczyste paski,
tworzące ścieżki. Po przeciwległych stronach tarczy, na wysokości ścieżek, umieszczone są
elementy optoelektroniczne – z jednej strony fotonadajniki (diody LED), z drugiej fotood-
biorniki (fototranzystory lub fotodiody). Często jeden fotonadajnik współpracuje z kilkoma
fotoodbiornikami. Tarcza, obracając się, przesłania lub odsłania fotonadajnik względem po-
szczególnych fotoodbiorników, kształtując ich sygnały wyjściowe (patrz rys. 1). Szerokość
pasków przezroczystych na podstawowej ścieżce równa jest szerokości odległości między
nimi, więc przy stałej prędkości kątowej sygnał wyjściowe fotoodbiorników mają kształt pro-
stokątny o współczynniku wypełnienia równym 0,5.
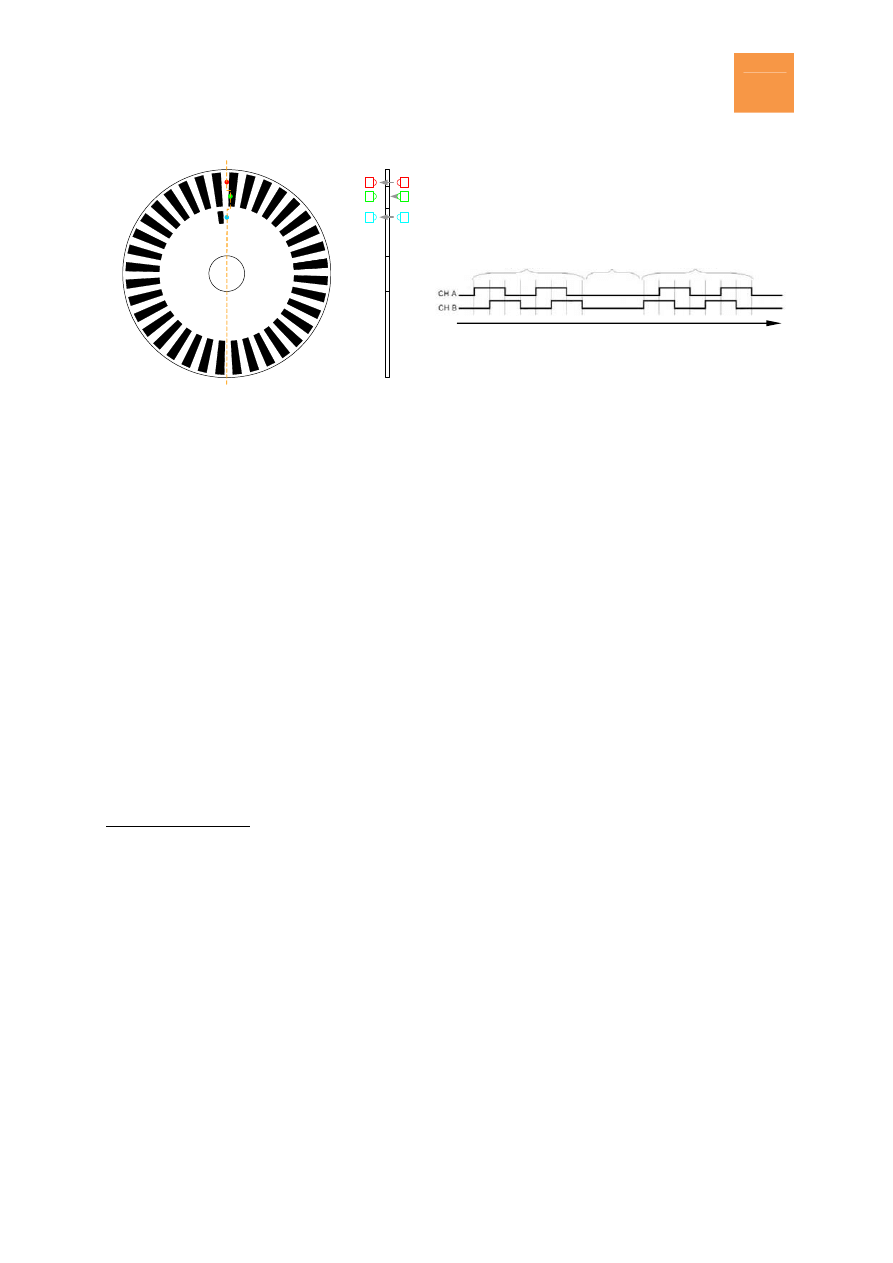
Sygnał z pojedynczego fotoodbiornika nie pozwala na określenie kierunku obrotu tar-
czy. Z uwagi na to, wykorzystuje się drugi fotoodbiornik, również umieszczony na wysokości
ścieżki podstawowej, przesunięty od pierwszego o taką odległość kątową, aby ich sygnały
wyjściowe przy jednostajnym obrocie tarczy były przesunięte względem siebie o ćwierć okre-
su. Kolejność występowania zboczy obu sygnałów pozwala na określenie kierunku wirowania
tarczy (rys. 2).
Do określania przyrostu położenia kątowego można wykorzystać liczbę zliczonych
impulsów, lub też liczbę zliczonych zboczy – narastających i opadających. Mówi się wów-
czas o zwielokrotnianiu rozdzielczości enkodera (zboczy jest 2 razy więcej, a przy wykorzy-
staniu sygnałów z obydwu fotoodbiorników – 4 razy więcej niż impulsów). Ponieważ omó-
wione sygnały pozwalają określić jedynie przyrost położenia, nie zaś położenie absolutne, w
enkoderach często stosuje się trzeci fotoodbiornik współpracujący z osobną ścieżką. Na
ścieżce tej umieszcza się pojedynczy znacznik, zatem sygnał z trzeciego kanału ma postać
tylko jednego impulsu na obrót. Sygnału tego (oznaczanego jako: C, Z lub NM) używa się do
określania tzw. pozycji bazowej. Położenie względne zmierzone od położenia bazowego po-
zwala na określenie położenia bezwzględnego.
Przetworniki
elektroniczne do pomiaru wielkości mechanicznych:
enkodery, dalmierze laserowe, optyczne czujniki zbliżeniow
e
3
A
B
C (NM)
Rys. 1. Schematyczna budowa enkodera
przyrostowego
Rys. 2. Przebiegi wyjściowe kanałów A i B
enkodera przyrostowego
W celu ochrony sygnału wyjściowego przed zakłóceniami, enkodery często wyposaża
się w wyjścia typu różnicowego. Ponadto, sygnał wyjściowy enkodera poddawany jest filtra-
cji analogowo-cyfrowej. Człon analogowy filtru odseparowuje zakłócenia o małej amplitu-
dzie (szum), zaś filtr cyfrowy przepuszcza tylko impulsy o pewnym minimalnym czasie trwa-
nia określonym jako wielokrotność okresu zegara taktującego. Wprowadza to pewne opóź-
nienie oraz ograniczenie prędkości obrotowej enkodera. Rozdzielczości osiągane przez precy-
zyjne enkodery sięgają kilkudziesięciu tysięcy inkrementów na obrót.
Sygnały z enkodera przyrostowego mogą być wykorzystane do obliczenia prędkości
obrotowej – zmiana położenia czyli liczba zliczonych impulsów w pewnym określonym cza-
sie jest wprost proporcjonalna do prędkości obrotu tarczy. Metoda ta jest przydatna dla
znacznych prędkości obrotowych; przy prędkościach bardzo niskich, aby uzyskać zadowala-
jącą rozdzielczość pomiaru należałoby stosować bardzo długi czas zliczania. Alternatywą
może być wówczas pomiar czasu między dwoma sąsiednimi impulsami – jest on odwrotnie
proporcjonalny do prędkości.
Wiele wykorzystywanych w przemyśle procesorów sygnałowych posiada specjalne
moduły enkoderowe, upraszczające podłączenie oraz obsługę programową enkodera.
Enkodery absulutne
Enkodery absolutne pozwalają na bezpośrednie określenie absolutnej pozycji kątowej.
Informacja o niej zapisana jest na tarczy enkodera, zwanej w tym przypadku tarczą kodową.
Na tarczy tej wyróżnia się wiele ścieżek (w liczbie zależnej od rozdzielczości enkodera), na
których zapisana jest cyfrowo informacja o poszczególnych bitach informacji położeniowej.
Fizyczny sposób zapisu informacji jest analogiczny jak w enkoderach przyrostowych (paski).
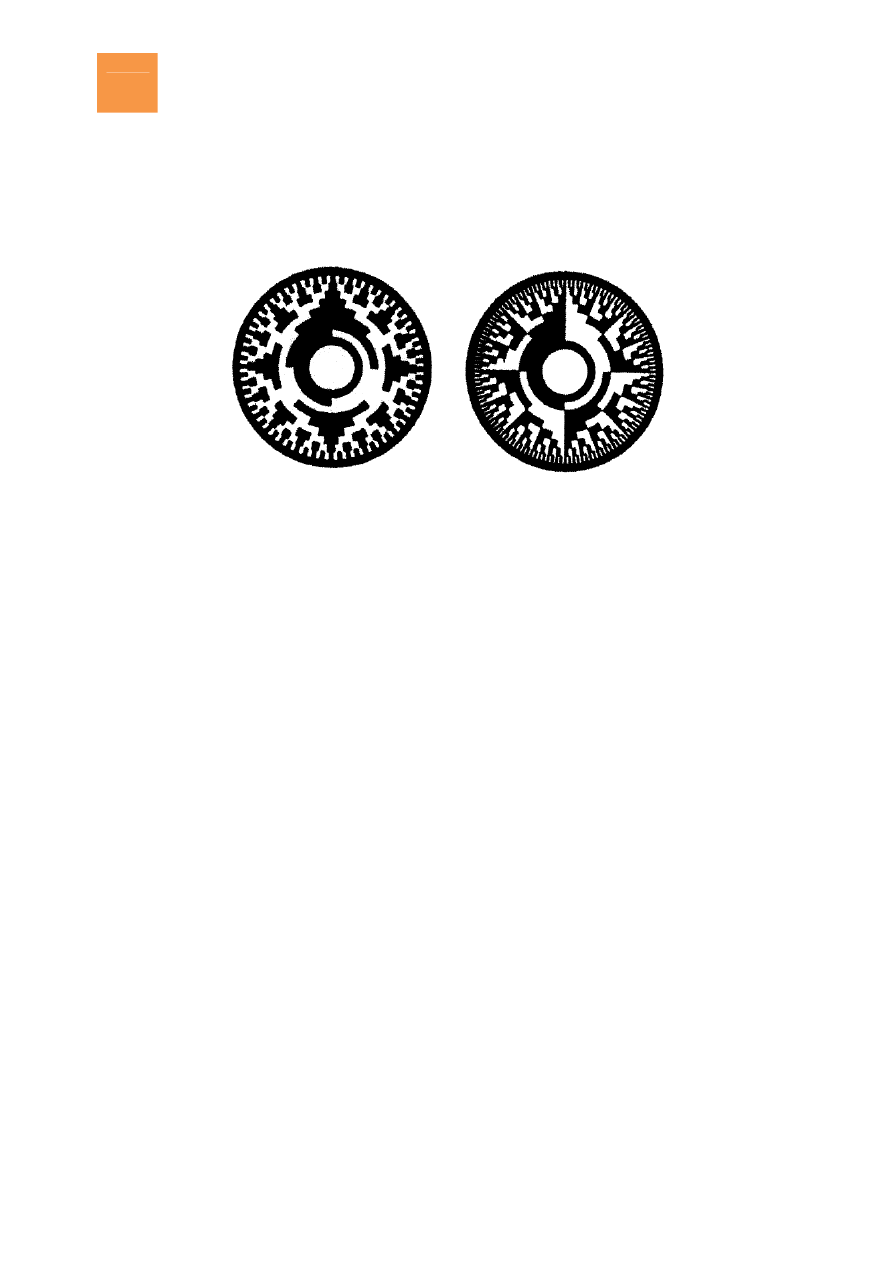
Informacja o położeniu kątowym może być zapisana na tarczy w kodzie binarnym naturalnym
lub w kodzie Gray’a – patrz rys. 3.
To drugie rozwiązanie jest obecnie częściej stosowane. W przypadku kodu binarnego
naturalnego, podczas zmiany wartości zapisanej liczby o 1 w większości przypadków nastę-
puje jednoczesna zmiana kilku bitów kodu. Z powodu niedokładności wykonania tarczy ko-
dowej, różnych czasów propagacji sygnałów i innych zjawisk może to prowadzić do błędnego
odczytu pozycji w momencie zmiany inkrementu. Kod Gray’a charakteryzuje się tym, że przy
zmianie zakodowanej liczby o 1 zmienia się tylko jeden bit kodu. W związku z tym, błąd
spowodowany wspomnianymi czynnikami, w przypadku tarczy z informacją zapisaną w ko-
dzie Gray’a, może odpowiadać co najwyżej pojedynczemu inkrementowi.
t
A wyprzedza B
(jeden kierunek
obrotów)
B wyprzedza A
(drugi kierunek
obrotów)
Wirnik
zatrzy-
many
4
Elektronika
Enkodery absolutne, z uwagi na trudności w wykonaniu tarczy kodowej, osiągają
mniejsze rozdzielczości niż enkodery przyrostowe. Wiele enkoderów absolutnych posiada
wewnętrzne układy elektroniczne konwertujące sygnały z fotoodbiorników na sygnał szere-
gowy (ang. Serial Encoder Interface – SEI).
a) b)
Rys. 3. Tarcze enkodera absolutnego z informacją zapisaną:
a) w kodzie Gray’a; b) w kodzie binarnym naturalnym
Dalmierz laserowy
Do precyzyjnych pomiarów odległości i przemieszczeń obiektów stosuje się obecnie
powszechnie dalmierze laserowe. Istnieją dwie podstawowe grupy tych urządzeń, różniące się
zakresem pomiaru i zasadą działania:
• dalmierze o zasięgu od ok. 1 m do kilkuset metrów (przy zastosowaniu specjalnych ekra-
nów refleksyjnych na obiekcie obserwowanym lub w wersjach militarnych – nawet do
kilkunastu kilometrów) – działają na zasadzie identycznej jak radar, ale długość fali emi-
towanego promieniowanie leży w zakresie światła widzialnego lub (częściej) podczerwie-
ni; emitowana silnie skupiona wiązka promieniowania lasera, po odbiciu od obiektu wraca
(częściowo) do detektora. Czas od wysłania wiązki do wykrycia fali odbitej, mierzony
przy pomocy wbudowanych specjalizowanych procesorów sygnałowych, pozwala okre-
ślić odległość od obiektu. Dalmierze tego typu są stosowane dość powszechnie w technice
wojskowej (wykrywanie i określanie współrzędnych celu), przy sterowaniu i kontroli ru-
chu dużych obiektów (statków w portach, pociągów na stacjach rozrządowych itp.), w
geodezji, w budownictwie, w sporcie i rekreacji (łowiectwo, strzelectwo, golf). Maksy-
malne częstotliwości próbkowania mieszczą się najczęściej w przedziale od 0,5 Hz do kil-
kudziesięciu Hz.
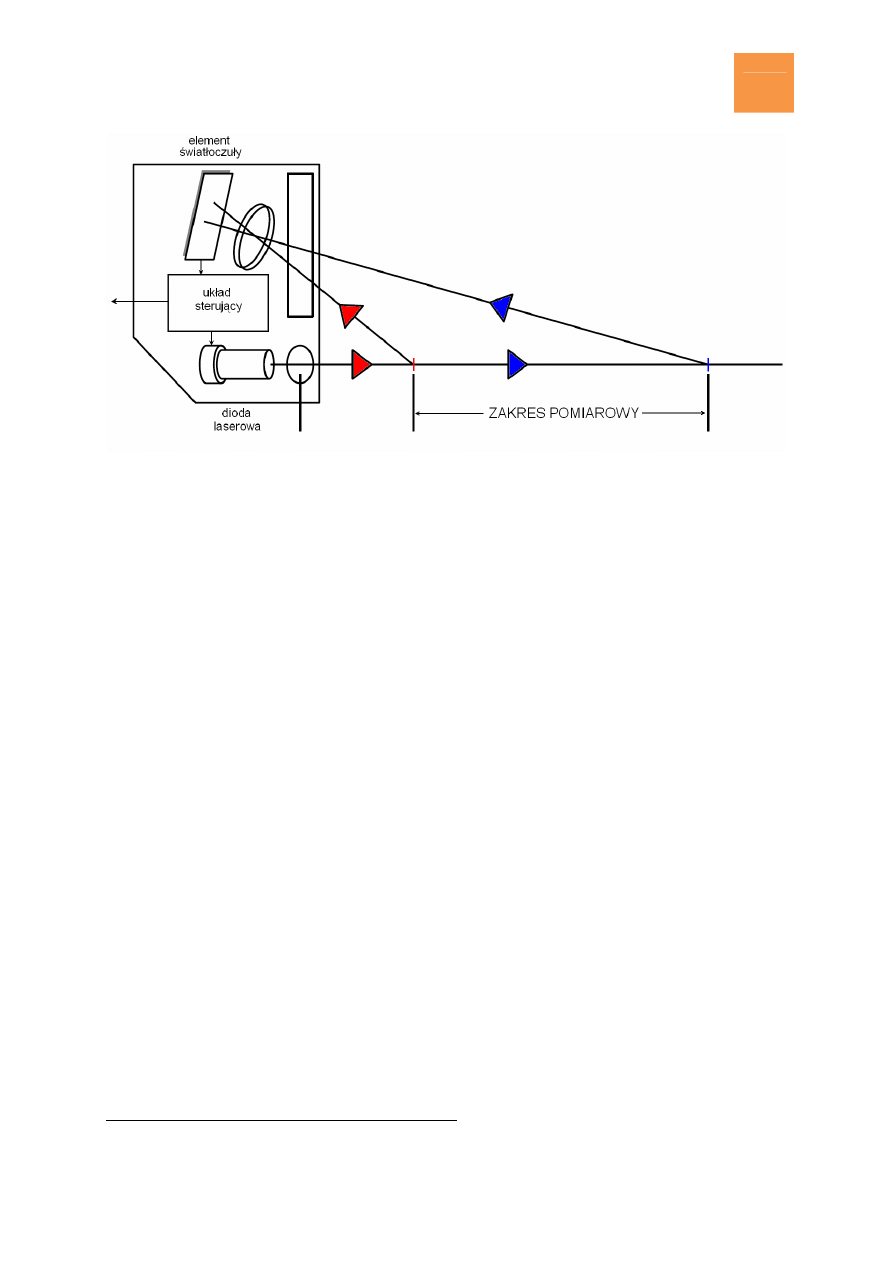
• dalmierze o zasięgu do 1 m – są to z reguły czujniki działające na zasadzie triangulacyj-
nej. Specjalna dioda laserowa emituje skupioną wiązkę promieniowania światła widzial-
nego, dającą bardzo małą plamkę na powierzchni mierzonego obiektu. Odbite od tej
plamki światło jest zobrazowane poprzez układy optyczne na elemencie światłoczułym
wewnątrz czujnika (linijka CCD). Jeśli obiekt zmienia odległość od czujnika, następuje
przesunięcie punktu odwzorowania plamki świetlnej na linijce CCD, co jest rozpoznawa-
ne i przetwarzane przez wewnętrzny układ elektroniczny czujnika. Zasada działania czuj-
nika jest przedstawiona schematycznie na rys. 4. Dalmierze tego typu zapewniają z reguły
rozdzielczość na poziomie 1/10000 (ok. 14-bitową), max. błąd na poziomie 1‰. Są sto-
sowane do precyzyjnych pomiarów odległości, w przemyśle i robotyce. Częstotliwości
próbkowania dochodzą do kilkunastu kHz.
Przetworniki
elektroniczne do pomiaru wielkości mechanicznych:
enkodery, dalmierze laserowe, optyczne czujniki zbliżeniow
e
5
Rys. 4. Budowa i zasada działania dalmierza laserowego o krótkim zasięgu
Optyczne czujniki zbliżeniowe
Zadaniem czujników zbliżeniowych jest wykrycie obiektu w odległości mniejszej niż
ustalona dla danego czujnika wartość graniczna. W praktyce stosowane są czujniki zbliże-
niowe pojemnościowe, indukcyjne, ultradźwiękowe i optyczne odbiciowe. W czujnikach po-
jemnościowych i indukcyjnych wykorzystuje się zmianę pojemności lub indukcyjności ukła-
du o odpowiedniej strukturze przy zbliżeniu do niego ciała o innej niż powietrze przenikalno-
ści elektrycznej lub magnetycznej, co w określonym obwodzie może wywołać odpowiedni
sygnał napięciowy lub prądowy.
W czujnikach ultradźwiękowych i optycznych wykorzystuje się zjawisko odbicia fali
emitowanej przez nadajnik od obiektu znajdującego się w pobliżu czujnika i detekcji fali od-
bitej przez odbiornik. Czujniki ultradźwiękowe emitują promieniowanie w zakresie od kilku-
dziesięciu do kilkuset kiloherców, zaś czujniki optyczne – promieniowanie elektromagne-
tyczne o częstotliwości w zakresie światła widzialnego lub (częściej) podczerwieni. Energia
sygnału odebranego (odbitego) jest tym większa, im bliżej od czujnika znajduje się wykrywa-
ny obiekt. Z reguły czujniki zbliżeniowe mają wbudowane układy dyskryminatorów, które na
wyjściu dostarczają sygnał dwustanowy (logiczny), informujący o przekroczeniu przez obiekt
odległości progowej (granicznej). Niekiedy w czujnikach tego typu sygnał wyjściowy ma
charakter analogowy, co w zasadzie pozwala wykorzystać go do pomiaru odległości od
obiektu – podobnie jak w dalmierzach laserowych; należy jednak wziąć pod uwagę fakt, że
zależność jest silnie nieliniowa, a ponadto na wartość sygnału wyjściowego może wpływać
szereg czynników innych niż odległość (np. kąt nachylenia powierzchni wykrywanego obiek-
tu, jej kolor, zdolność do odbijania lub pochłaniania światła, zanieczyszczenia). Czujniki
optyczne odbiciowe maja najczęściej nadajnik i odbiornik zintegrowane w jednej obudowie.
2. PRZEBIEG ĆWICZENIA
W ramach realizacji ćwiczenia należy wykonać badania układów wskazanych przez
prowadzącego.
Układ laboratoryjny z enkoderem przyrostowym
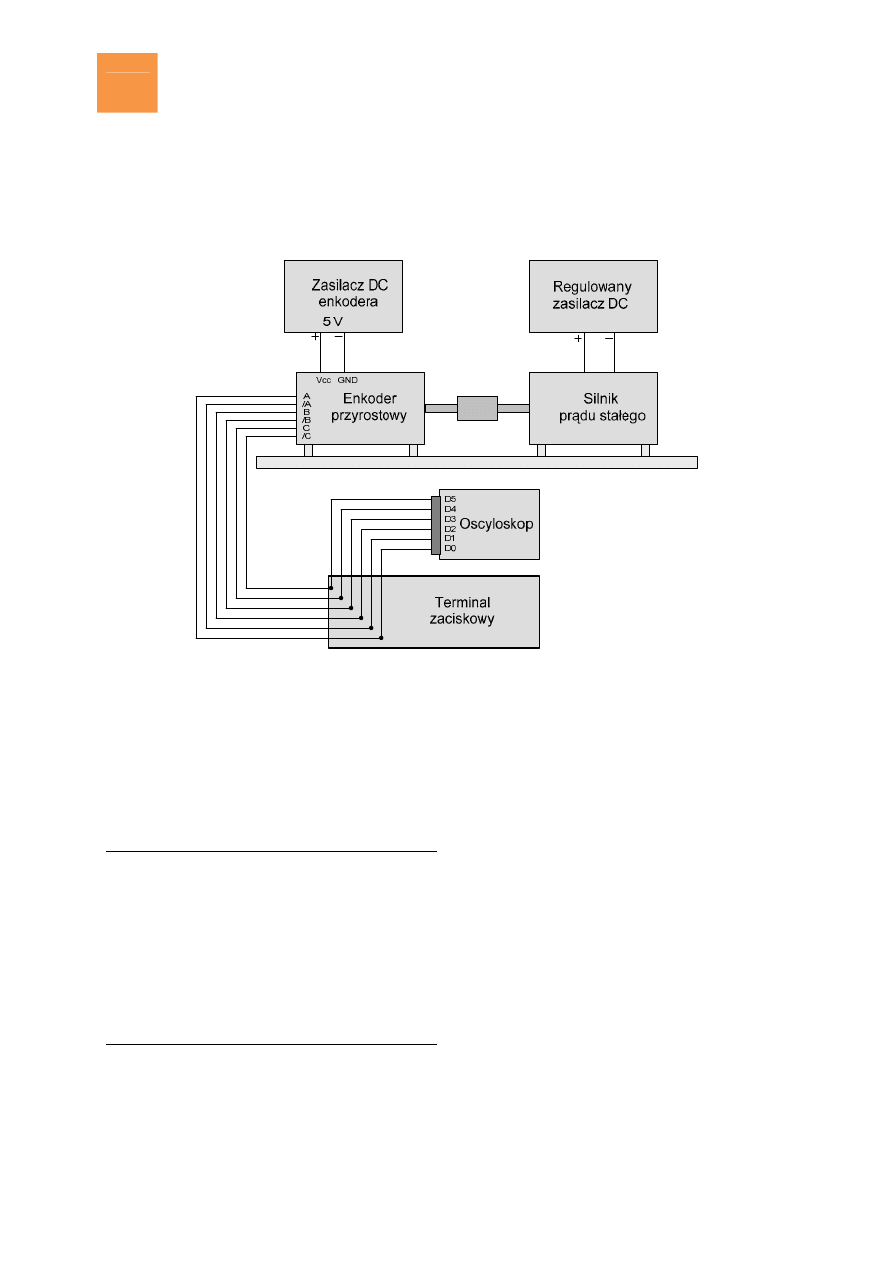
W skład układu wchodzą (rys. 5):
6
Elektronika
- enkoder (Megatron MOB 500/5/82/N) o rozdzielczości 500 impulsów na obrót i
wyjściu różnicowym (sygnały: A, /A B, /B, C, /C),
- silnik prądu stałego (zasilany z regulowanego zasilacza) napędzający enkoder,
- terminal zaciskowy,
- oscyloskop.
Rys. 5. Schemat blokowy układu z enkoderem przyrostowym
W ramach ćwiczenia należy zarejestrować przy pomocy oscyloskopu i przeanalizować
przebiegi sygnałów wyjściowych enkodera dla obydwu kierunków obrotu i dla różnych pręd-
kości. Zmianę prędkości uzyskujemy poprzez zmianę wartości napięcia zasilającego silnik,
zaś zmianę kierunku obrotów – przez zmianę polaryzacji tego napięcia (przełączenie przewo-
dów „+” i „–”).
Układ laboratoryjny z enkoderem absolutnym
Układ składa się z 12-bitowego enkodera absolutnego (WObit M600) z wyjściem sze-
regowym SEI oraz komputera PC. Enkoder przyłączony jest do łącza szeregowego RS232
komputera. Wykorzystane zostało oprogramowanie demonstracyjne dostarczone przez produ-
centa pozwalające na odczyt położenia kątowego oraz zmianę parametrów pracy enkodera. W
ramach ćwiczenia przewiduje się sprawdzenie działania enkodera i oprogramowania w zakre-
sie dokładności i zakresu określenia pozycji bezwzględnej wału, wpływu prędkości obrotowej
na dokładność określenia położenia, programowalności parametrów układu.
Układ laboratoryjny z dalmierzem laserowym
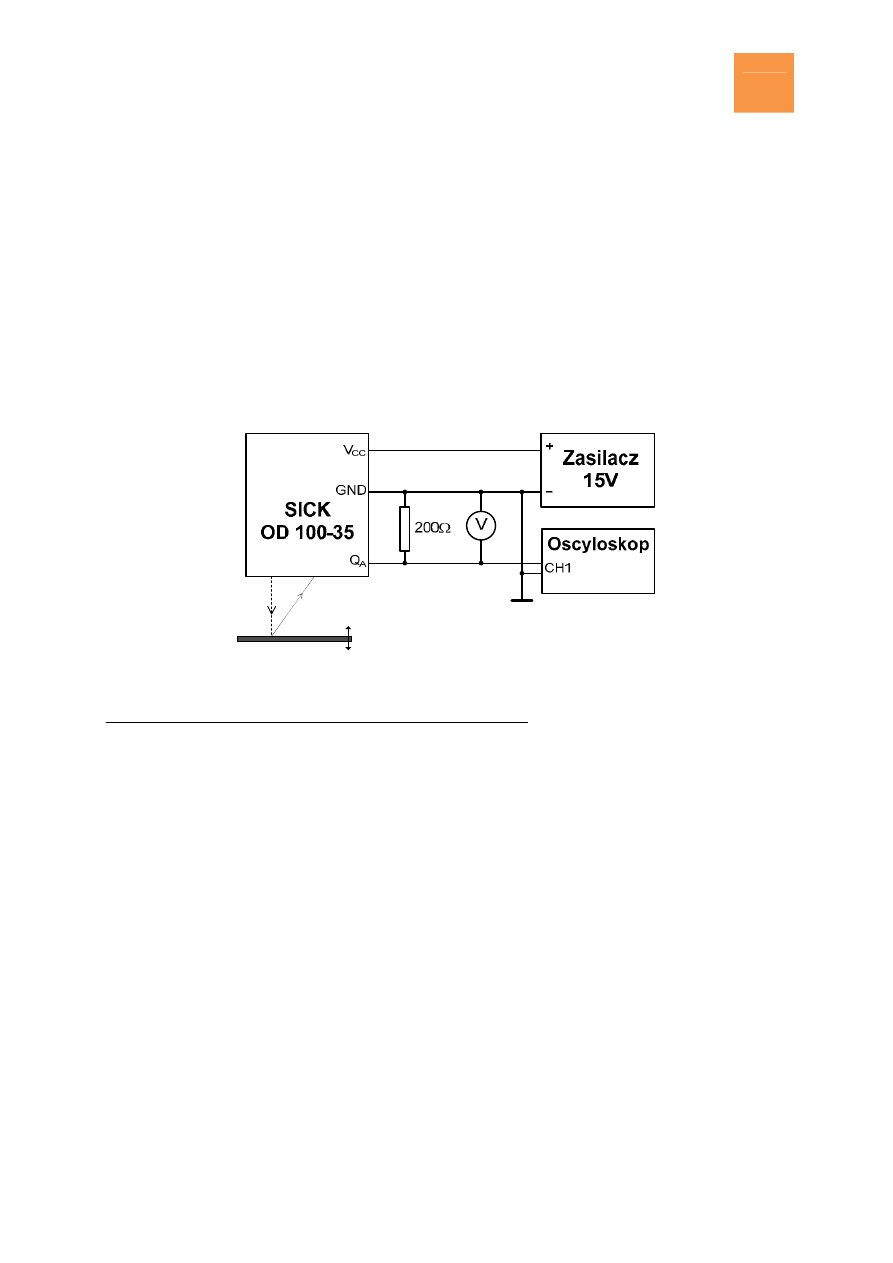
Badany w ćwiczeniu przetwornik to dalmierz laserowy SICK OD 100-35, działający
na zasadzie triangulacji optycznej. Podstawowe parametry przetwornika:
• zakres pomiarowy: 100 mm ± 35 mm,
• sygnał wyjściowy prądowy 4–20 mA,
Przetworniki
elektroniczne do pomiaru wielkości mechanicznych:
enkodery, dalmierze laserowe, optyczne czujniki zbliżeniow
e
7
• dokładność typowo ±2% zakresu pomiarowego (zależnie od powierzchni odbija-
jącej);
• rozdzielczość ok. 50 µm (dla częstotliwości próbkowania ok. 40 S/s);
• napięcie zasilania V
CC
= 12÷24 V;
• prąd pobierany (typowo) I
CC
= 75 mA (dla V
CC
= 24 V);
• pasmo przenoszenia do 720 Hz;
• zakres temperatur pracy -10 °C do +40 °C.
Schemat blokowy układu pomiarowego pokazano na rys. 6. W ćwiczeniu należy dokonać
pomiaru odległości płaskiej płytki od dalmierza laserowego – zbliżając i oddalając płytkę
zaobserwować na oscyloskopie zmiany sygnału wyjściowego czujnika. Posługując się linijką
z podziałką określić zakres pomiarowy przetwornika. Sprawdzić wrażliwość czujnika na
zmiany kąta padania strumienia pomiarowego na powierzchnię płytki oraz na rodzaj (kolor)
powierzchni płytki.
Rys. 6. Schemat blokowy układu do badania dalmierza laserowego
Układ laboratoryjny z czujnikiem optycznym odbiciowym
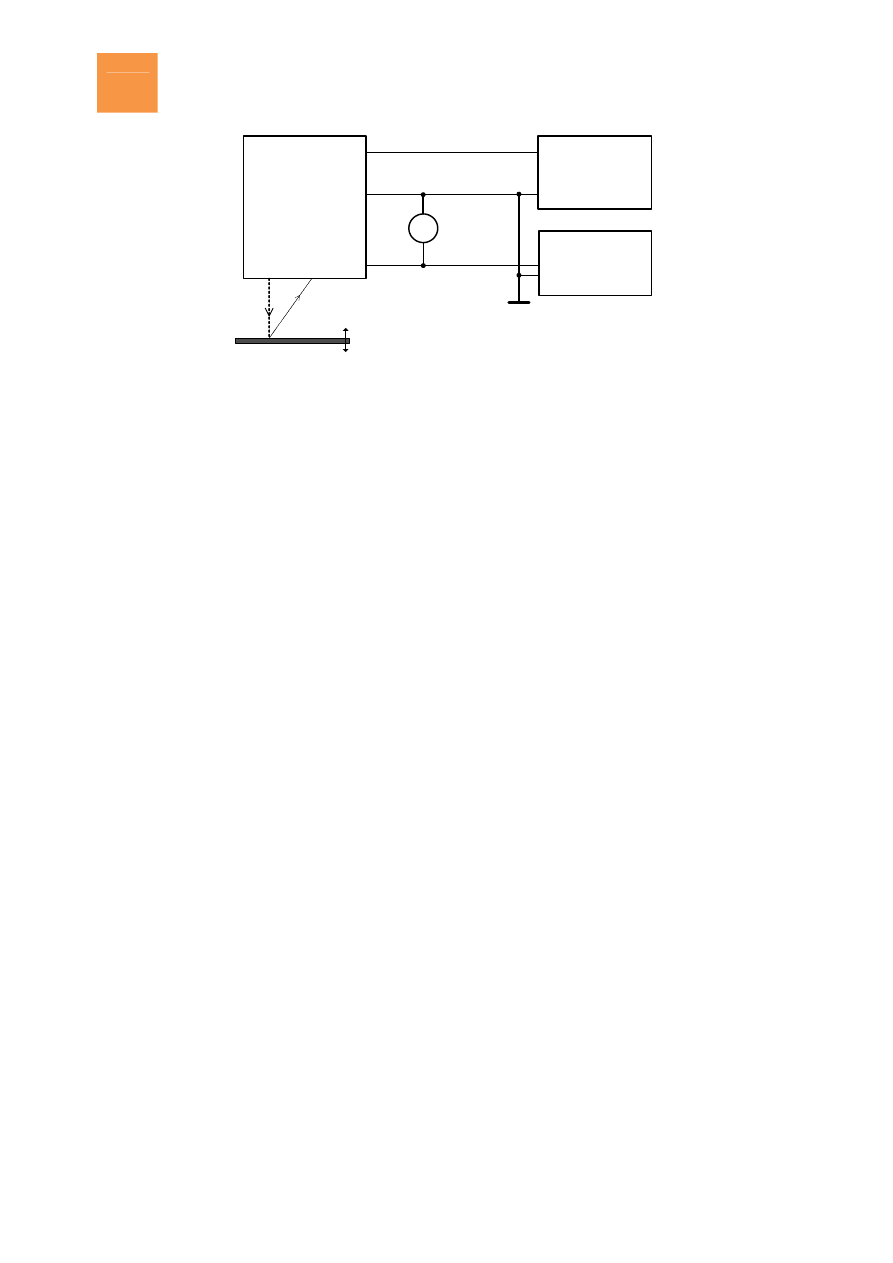
Badany w ćwiczeniu czujnik to układ SHARP GP2Y020AYK, działający na zasadzie detekcji
mocy promieniowania odbitego od obiektu. Podstawowe parametry przetwornika:
• zakres pomiarowy: 200 mm – 1500 mm;
• zakres sygnału wyjściowego (sygnał napięciowy) 0,4V (dla l=1500mm) – 2,7V
(dla l=200mm), charakterystyka nieliniowa;
• napięcie zasilania V
CC
= 5 V;
• zakres temperatur pracy -10 °C do +60 °C.
Schemat blokowy układu pomiarowego przedstawiono na rys. 7 – w stosunku do układu do
badania dalmierza laserowego brak rezystora 200
Ω, gdyż czujnik dostarcza sygnał napięcio-
wy, inne jest również napięcie zasilania. W ćwiczeniu należy dokonać pomiaru odległości
płaskiej płytki od dalmierza laserowego – zbliżając i oddalając płytkę zaobserwować na oscy-
loskopie zmiany sygnału wyjściowego czujnika. Posługując się linijką z podziałką wyznaczyć
charakterystykę czujnika tzn. funkcję: U
wy
= f(l) oraz sprawdzić zakres pomiarowy przetwor-
nika. Sprawdzić wrażliwość czujnika na zmiany kąta padania strumienia pomiarowego na
powierzchnię płytki.
8
Elektronika
SHARP
GP2Y020AYK
Zasilacz
5 V
V
+
-
Oscyloskop
CH1
GND
V
O
V
CC
Rys. 7. Schemat blokowy układu do badania czujnika zbliżeniowego
NA ZAJECIA NALEŻY PRZYNIEŚĆ NOŚNIK DANYCH
KORZYSTAJĄCY Z INTERFEJSU USB
3. SPRAWOZDANIE
W sprawozdaniu należy:
• omówić przebieg ćwiczenia,
• zamieścić oscylogramy sygnałów wyjściowych enkodera przyrostowego dla różnych
prędkości i dla obydwu kierunków obrotów – porównać przebiegi, scharakteryzować
różnice w sekwencji impulsów, dla wybranego oscylogramu wykonać obliczenie
prędkości obrotowej wału enkodera (podać prędkość w obr/min),
• omówić działanie enkodera absolutnego, opisać zaobserwowane zjawiska,
• narysować charakterystyki badanego dalmierza laserowego i optycznego czujnika
zbliżeniowego – zależności napięcia wyjściowego od mierzonej odległości; zwrócić
uwagę na zakres pomiaru. Podać zależności sygnału wyjściowego dalmierzy od kąta
ustawienia powierzchni odbiciowej i od rodzaju i koloru powierzchni – sformułować
wnioski.
4. PYTANIA
1. Omówić zasadę działania enkodera przyrostowego, narysować przykładowe przebiegi
sygnałów wyjściowych przy obydwu kierunkach obrotów.
2. Określić warunki, jakie musi spełniać układ sterowania, aby można było użyć enkode-
ra przyrostowego do wyznaczania bezwzględnego położenia kątowego wału maszyny.
3. Jakie znaczenie praktyczne ma rozdzielczość enkodera w pomiarze położenia i pręd-
kości?
4. Wyjaśnić, dlaczego w enkoderach absolutnych stosuje się z reguły tzw. kod Gray’a, a
nie np. zwykły kod binarny?
5. Opisać zasadę działania dalmierza laserowego triangulacyjnego.
6. Dlaczego do pomiaru dużych odległości stosuje się dalmierze laserowe odbiciowe, a
nie triangulacyjne?

Przetworniki
elektroniczne do pomiaru wielkości mechanicznych:
enkodery, dalmierze laserowe, optyczne czujniki zbliżeniow
e
9
5. ZAGADNIENIA
1. Zaproponować schemat układu, generującego binarny sygnał kierunku obrotów na
podstawie typowych sygnałów wyjściowych enkodera przyrostowego.
2. W jaki sposób przy pomocy dalmierza laserowego można mierzyć prędkość porusza-
jących się obiektów. Jakie występują ograniczenia przy tego typu pomiarach.
Wyszukiwarka
Podobne podstrony:
MM CW6L nowe
MM CW5L nowe
MM CW4L nowe
MM CW7L nowe
integracja-mm, chomikowane nowe, cybernetyka
informacja-mm, chomikowane nowe, cybernetyka
homeostaza-mm, chomikowane nowe, cybernetyka
hnpn-mm, chomikowane nowe, cybernetyka
ems-mm, chomikowane nowe, cybernetyka
MM CW5L nowe
MM CW4L nowe
MM CW5L nowe
zajcia 3 nowe
style nowe
Rozrˇd Šwiczenia nowe
pytania nowe komplet
więcej podobnych podstron