
Sieci wymiany danych
Z
Elektronika
Instrukcja
do
laboratorium
Ćw. 4
dr inż. Leszek Jarzębowicz
Katedra Inżynierii Elektrycznej
Transportu
Gdańsk, 2012
Pomiar i sterowanie
w sieci przemysłowej
2
Elektronika
1. WPROWADZENIE
W przemysłowych układach sterowania procesami od kilkunastu lat można zauważyć
tendencję do decentralizacji. Dawniej w systemie wyróżniano jedno urządzenie wykonujące
obliczenia związane z algorytmem sterowania, wyposażone w odpowiednie interfejsy wej-
ścia/wyjścia, do których przyłączone były wszystkie elementy pomiarowe oraz elementy wy-
konawcze. Obecnie algorytm sterowania jest często rozproszony, jego fragmenty rozdzielone
są na wiele modułów. Komunikacja pomiędzy modułami odbywa się za pośrednictwem
przemysłowych sieci wymiany danych, takich jak np. CAN, RS-485, Ethernet.
Funkcje wykonywania obliczeń, pomiaru sygnałów oraz sterowania elementami wyko-
nawczymi są rozdzielne pomiędzy połączone w sieć moduły. Spotyka się rozwiązania tzw.
„inteligentnych czujników”, które oprócz elementu przetwarzającego wielkość mierzoną na
sygnał elektryczny zawierają przetwornik analogowo-cyfrowy oraz mikrokontroler i port ko-
munikacyjny. Taka konfiguracja pozwala na przetworzenie wyniku w samym czujniku i prze-
słanie go za pomocą sieci wymiany danych od razu do wielu modułów. Jest to korzystne z
punktu widzenia współdzielenia informacji w systemie oraz ze względu na dokładność po-
miaru (brak długich linii doprowadzających sygnał analogowy do przetwornika). Analogiczne
rozwiązania występują wśród elementów wykonawczych – tzw. „inteligentne aktuatory”.
2. WYBRANE STANDARDY WYMIANY DANYCH
Standard RS-232 został wprowadzony w 1962 r [1]. Służy on do komunikacji pomiędzy
dwoma urządzeniami. Maksymalna odległość pomiędzy urządzeniami to ok. 15 m, maksy-
malna szybkość transmisji podawana jest najczęściej jako 115200 b/s (bitów na sekundę).
Transmisja może się odbywać w wielu trybach. Omówiony zostanie tylko najprostszy i
zarazem najbardziej popularny – tryb transmisji asynchronicznej z wykorzystaniem linii TxD
(nadawanie) i RxD (odbiór). Transmisja odbywa się w trybie bitowo-szeregowym – w kie-
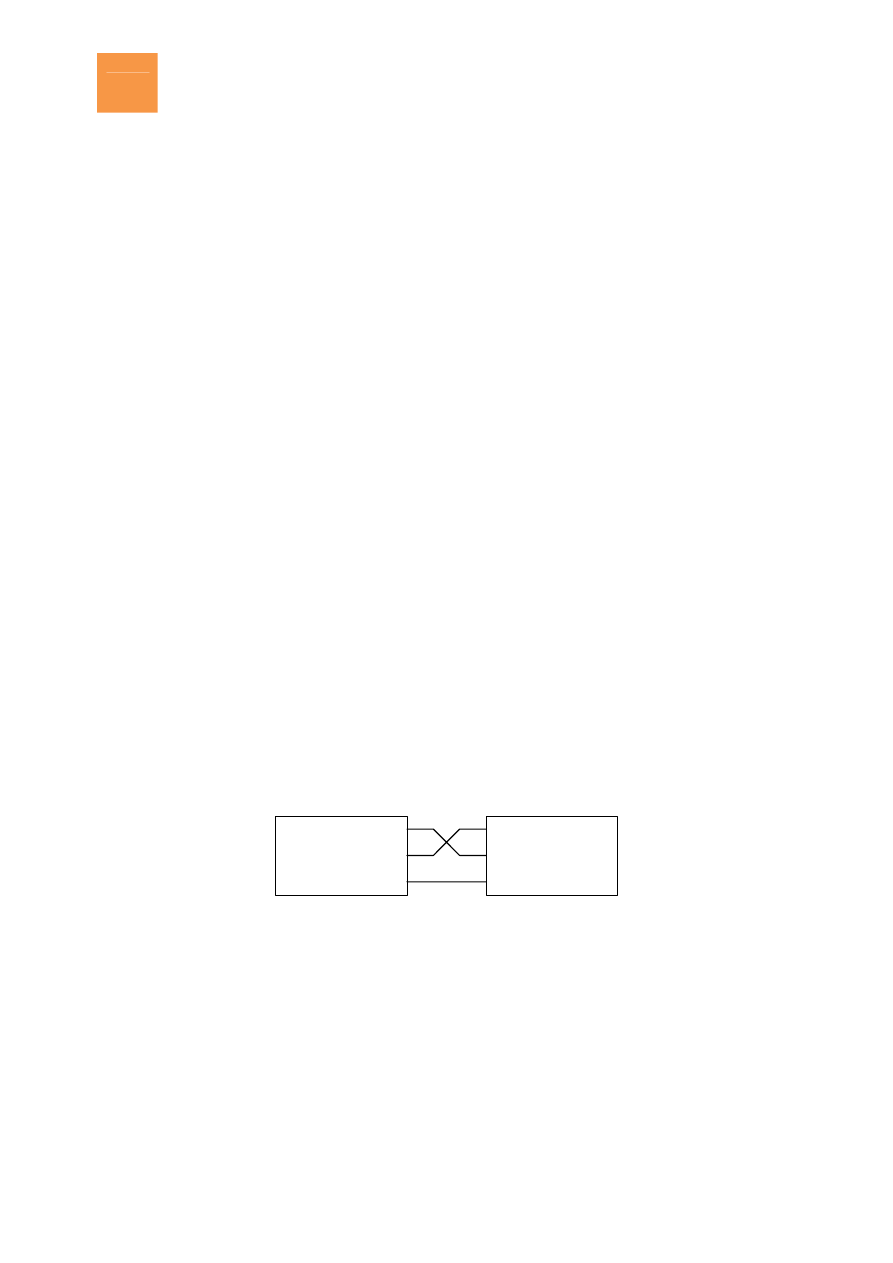
runku od nadajnika TxD do odbiornika RxD. Sposób połączenia urządzeń umożliwiający
transmisję dwukierunkową przedstawiono na rys. 1.
Urządzenie 1
Urządzenie 2
GND
GND
RxD
TxD
TxD
RxD
Rys. 1. Najprostszy sposób połączenia urządzeń w standardzie RS-232
Jako jedynka logiczna traktowany jest poziom napięcia (pomiędzy RxD i GND) w za-
kresie od -15 V do -3 V. Jako zero logiczne interpretowany jest poziom napięcia w zakresie
od 3 do 15 V. Poziomy napięć wystawianych przez nadajnik (TxD) wynoszą zazwyczaj
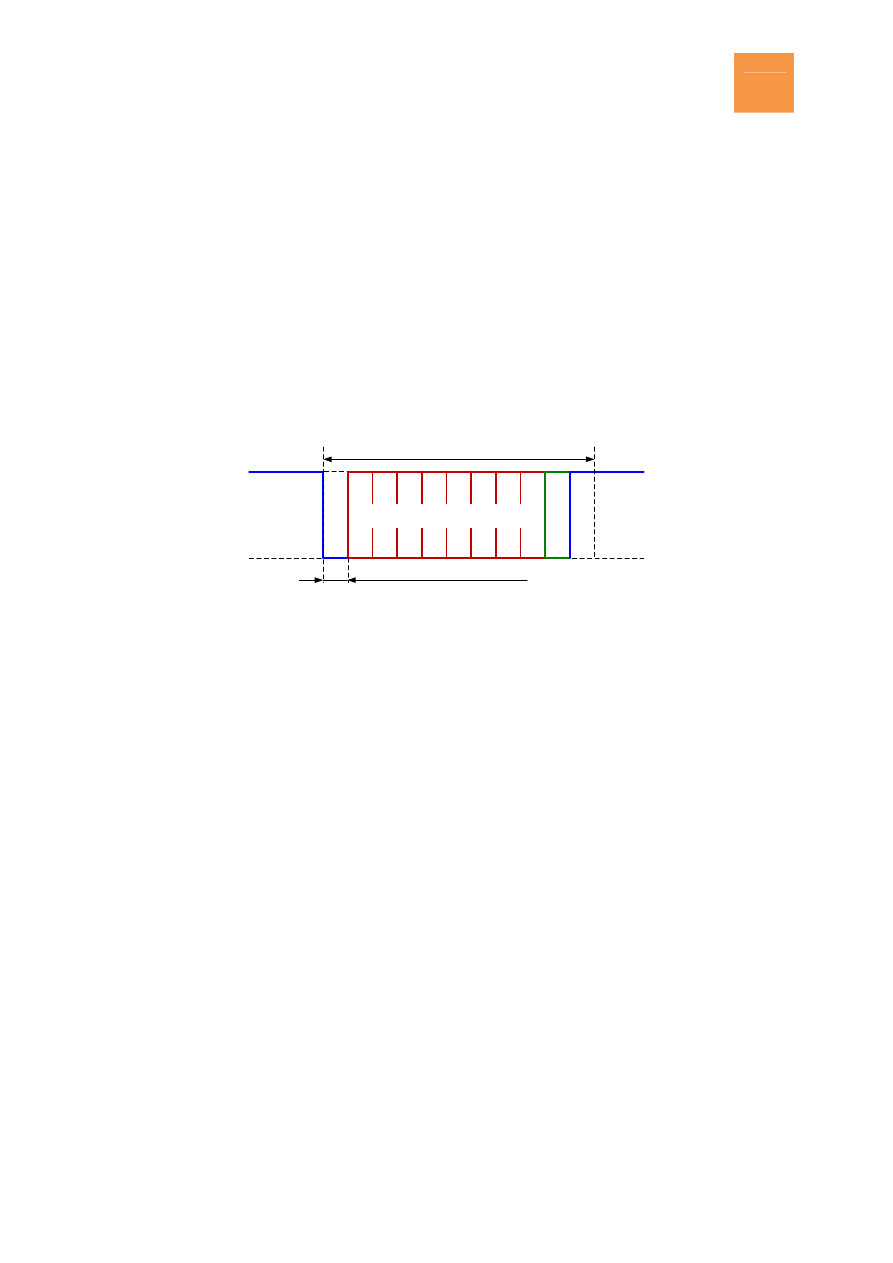
±12 V lub ±10 V. Informacja binarna przesyłana szeregowo od linii TxD do RxD formowana
jest w ramki (rys. 2).
Ramka jest najmniejszą porcją przesyłanej informacji. Oprócz informacji właściwej
(liczby, znaku) zawiera ona także bity dodatkowe dla celów synchronizacji i kontroli transmi-
sji. Niezajęta linia transmisyjna jest w stanie logicznego „1”. Transmisję ramki rozpoczyna bit
startu o wartości „0”. Bit startu zmienia stan linii, co informuje odbiornik o rozpoczęciu
Pomiar i sterowanie w sieci przemysłowej
3
nadawania ramki, a także pozwala zsynchronizować odbiornik z nadajnikiem. W dalszej czę-
ści ramki wysyłane są bity danych w liczbie 8 (lub rzadziej 7). Wartości bitów danych zależą
od przesyłanej informacji. Po bitach danych może wystąpić (zależnie od przyjętego trybu
komunikacji) bit kontrolny. Kontrola polega na zliczeniu bitów danych o wartości „1” i od-
bywa się w dwóch wariantach – poprzez bit parzystości lub poprzez bit nieparzystości (zależ-
nie od przyjętego trybu). Bit parzystości ustawiany jest na „1”, gdy liczba bitów danych o
wartości „1” jest nieparzysta, zaś na „0”, gdy liczba jedynek jest parzysta. W przypadku bitu
nieparzystości konwencja jest odwrotna. Ramkę kończy jeden bit stopu (rzadziej 2 lub 1,5).
Stan odpowiadający bitowi stopu („1”) nie różni się od stanu niezajętej linii. Bit stopu ma na
celu wymuszenie krótkiej przerwy na przetworzenie danych w przypadku chęci natychmia-
stowego nadania kolejnej ramki, a ponadto daje możliwość dodatkowej weryfikacji formatu
danych i ewentualnego wykrycia zakłócenia podczas transmisji informacji.
logiczne „1"
logiczne „0"
bit
st
art
u
bi
t stop
u
(o
pcj
o
na
ln
ie
d
w
a)
bit parzysto
ści
/
niepar
zysto
ści
bity danych (7 lub 8)
czas transmisji ramki danych
czas transmisji jednego bitu danych
Rys. 2. Struktura ramki danych w standardzie RS-232
Z uwagi na dopuszczalne różnice w budowie ramki (liczba bitów danych, sposób kon-
troli, liczba bitów stopu), a także różne stosowane prędkości transmisji (inaczej – czasy trwa-
nia pojedynczych bitów), oba komunikujące się urządzenia muszą mieć ustawione identyczne
parametry transmisji. W przeciwnym razie odebrana informacja może zostać błędnie zinter-
pretowana.
Pomimo iż standard RS-232 powstał wiele dziesięcioleci temu, jest on nadal popularny,
nawet w nowoczesnych urządzeniach.
Standard RS-485 jest rozwinięciem RS-232 (jednym z wielu) wprowadzonym w
1983 r [1]. Budowa ramki pozostała bez zmian. Podstawowymi różnicami w relacji do pier-
wowzoru są:
• transmisja różnicowa (nie względem masy),
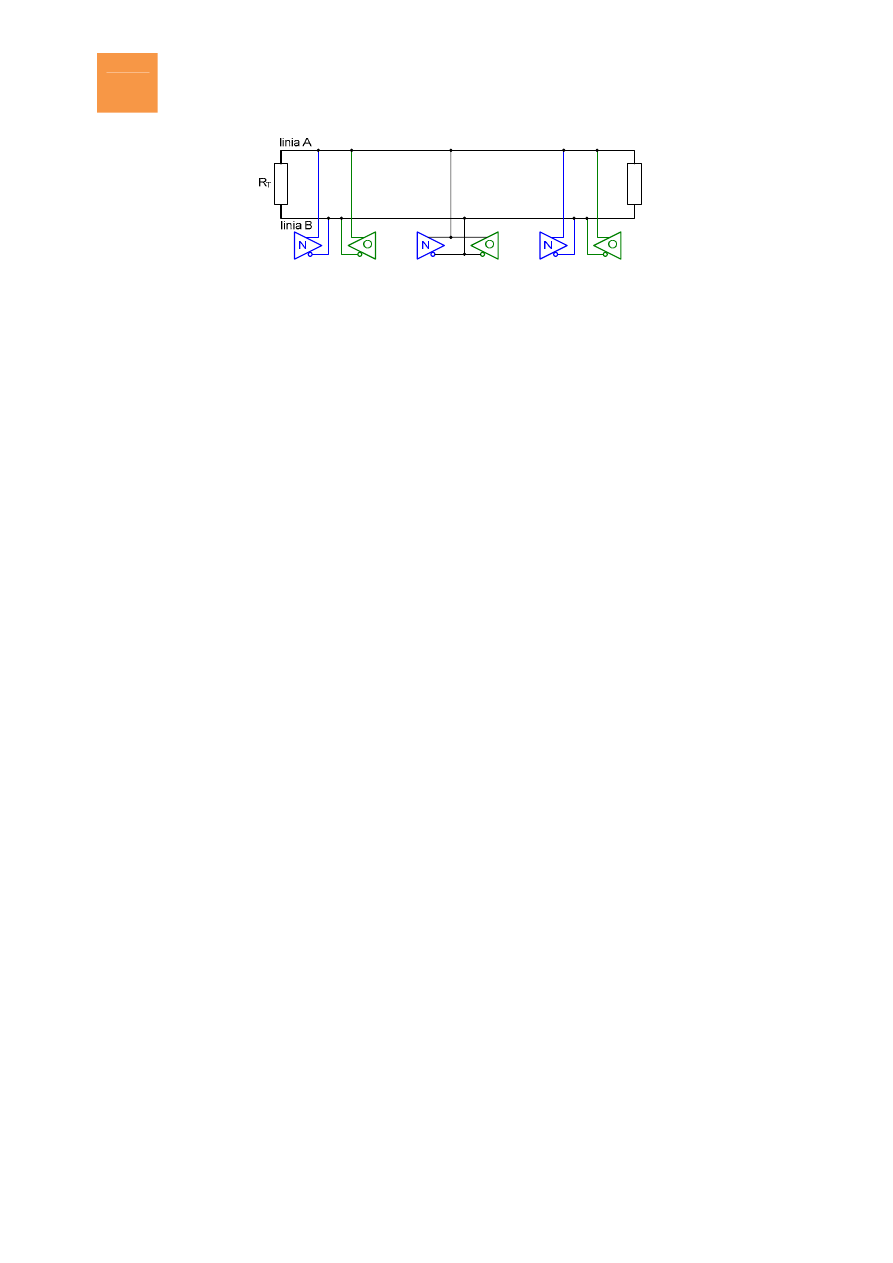
• możliwość bezpośredniego przyłączenia do magistrali 32 nadajników i 32 odbior-
ników (rys. 3),
• zwiększona długość linii transmisyjnej do 1 km, zwiększona szybkość transmisji
do 10 Mb/s.
4
Elektronika
Rys. 3. Sposób przyłączenia urządzeń do magistrali RS-485
Nadajniki muszą mieć wyjścia trójstanowe, ponieważ w danym przedziale czasu może
nadawać tylko jeden z nich. Trzeci stan wyjścia nadajnika układu – stan wysokiej impedancji,
to odzwierciedla sytuację, gdy nadajnik nie bierze udziału w transmisji sygnałów. Zazwyczaj
w sieci wyróżnia się jedno urządzenie nadrzędne (ang. Master), które zarządza przepływem
informacji. Urządzenie nadrzędne może dokonywać wyboru aktualnie aktywnego nadajnika
przy użyciu osobnej linii CS (ang. Cable Select). Innym rozwiązaniem, nie wiążącym się z
koniecznością prowadzenia odrębnych linii CS od urządzenia Master do każdego z nadajni-
ków, jest przyjęcie odpowiednich reguł współdzielenia magistrali. Na przykład – każde pole-
cenie wysłane przez urządzenie Master zawiera identyfikator urządzenia podrzędnego, a
urządzenia podrzędne mogą wysyłać informację na magistralę tylko po odebraniu skierowa-
nego do nich żądania.
3. STANOWISKO LABORATORYJNE
Stanowisko laboratoryjne jest modelem fragmentu rozproszonego układu przemysłowe-
go, działającego w oparciu o sieć wymiany danych, w którym realizowany jest laserowy po-
miar odległości.
Struktura układu
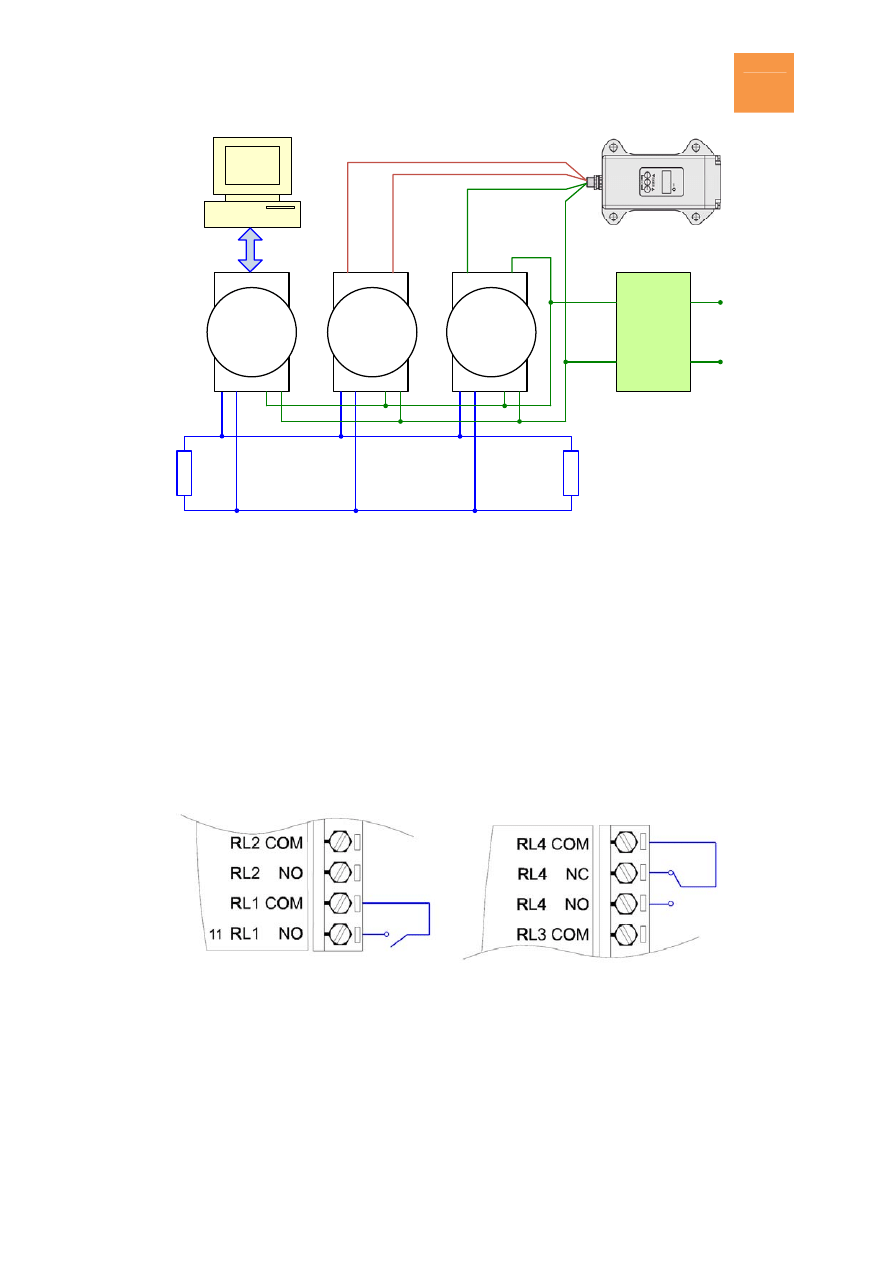
Strukturę połączeń stanowiska laboratoryjnego przedstawiono na rys. 4.
Jako sieć wymiany danych w układzie wykorzystano magistralę RS-485. Na końcach
magistrali zastosowano rezystory terminujące R
T
(tzw. terminatory), eliminujące niepożądane
zjawiska odbicia fali sygnału w linii. Do magistrali przyłączone są trzy moduły przemysłowe
ADAM serii 4000. Każdy z modułów spełnia inną funkcję (opisaną w dalszej części).
Dla umożliwienia wysyłania komend na magistralę RS-485 z poziomu komputera PC
zastosowano moduł ADAM-4520. Moduł ten pełni funkcję konwertera sygnałów dla standar-
dów RS-232/RS-485. Komputer PC (typowy) nie jest wyposażony w porty pracujące w stan-
dardzie RS-485. Dla umożliwienia dostępu do magistrali RS-485 konieczne jest więc zasto-
sowanie konwertera.
ADAM-4016 jest modułem wejść/wyjść analogowych oraz cyfrowych. Jest on wyposa-
żony w następujące interfejsy pomiarowo-sterujące:
• wejście analogowe napięciowe (zakres ustawiany od ±15 mV do ±500 mV),
• wejście analogowe prądowe (zakres 0-20 mA),
• wyjście napięciowe dedykowane dla przetworników tensometrycznych,
• czterokanałowe wyjście cyfrowe.
Pomiar i sterowanie w sieci przemysłowej
5
R
T
R
T
ADAM-4520
(konwerter
RS-232/
RS485)
ADAM-4016
(przetworniki
A/D i D/A)
ADAM-4060
(wyjścia
przekaźni-
kowe)
Zasilacz
napięcia
stałego
24 V
DC
230 V
AC
RS-232
Dalmierz laserowy
Magistrala RS-485
Rys. 4. Struktura połączeń stanowiska laboratoryjnego
Zależnie od ustawień zmierzone wartości mogą być przekazywane na magistralę RS-485 w
postaciach:
• wartości wyrażonych w jednostkach fizycznych – tzw. inżynierskich (mV lub
mA),
• wartości procentowych wyrażonych względem zakresu pomiarowego,
• komplementarnych par liczb heksadecymalnych.
ADAM-4060 jest modułem wyjść przekaźnikowych. Zawiera łącznie cztery przekaźni-
ki, po dwa z typów A i C (p. rys. 5).
a)
b)
Rys. 5. Struktura wyjść przekaźnikowych modułu ADAM-4060:
a) wyjście typu A (załączające), b) wyjście typu C (przełączające)
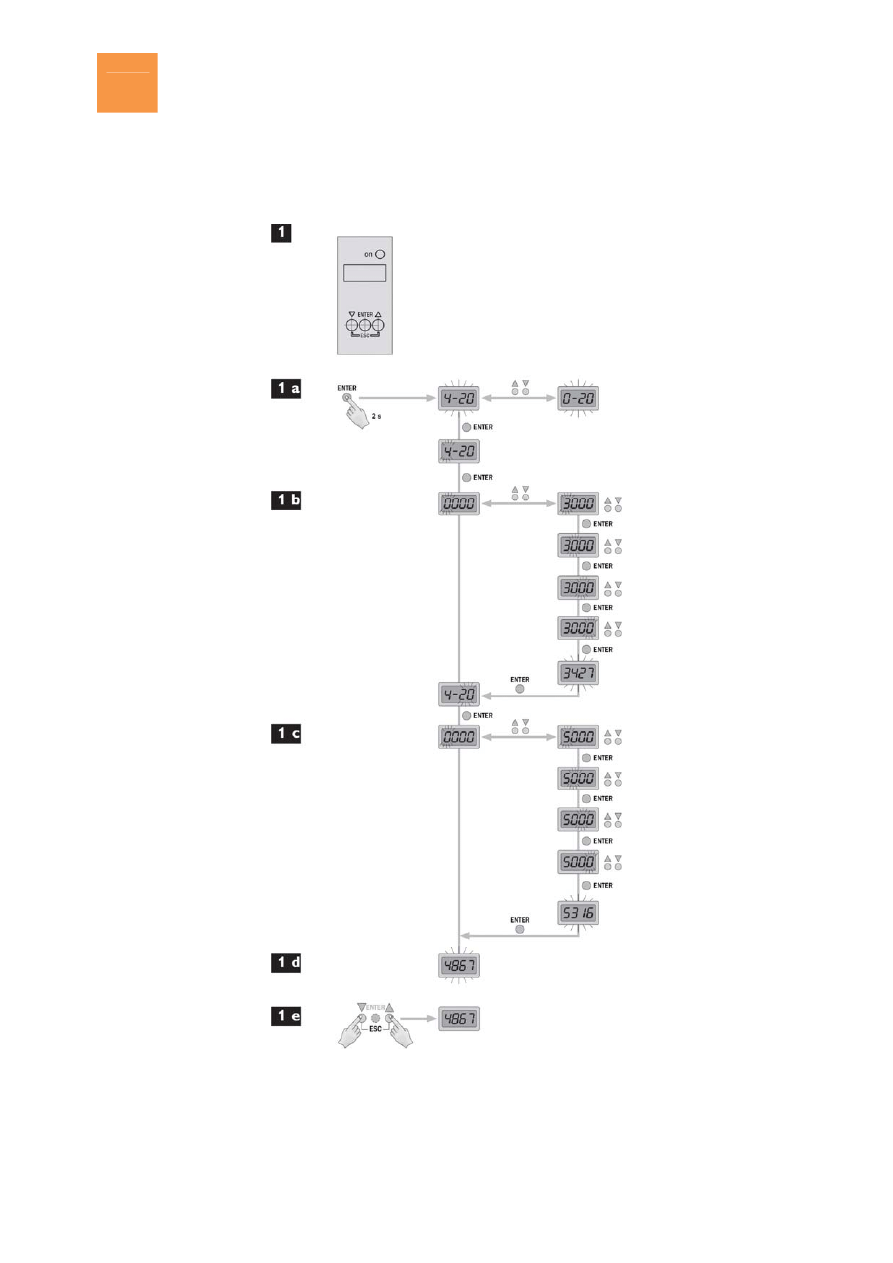
Elementem pomiarowym jest dalmierz laserowy DT500-411. Jest to przetwornik wy-
znaczający odległość na podstawie pomiaru czasu od wysłania wiązki lasera do wykrycia fali
odbitej od przeszkody. Zasięg dalmierza zależy od refleksyjności (koloru) powierzchni obiek-
tu, na który pada wiązka lasera. Maksymalna mierzalna odległość zawiera się w przedziale od
6
Elektronika
18 m (dla powierzchni czarnej) do 30 m (dla powierzchni białej). Rozdzielczość pomiaru wy-
nosi 1 mm. Długość fali świetlnej jest w zakresie widzialnym dla oka ludzkiego (kolor czer-
wony). Układ wyposażony jest w specjalizowany procesor służący do przetwarzania danych
pomiarowych. Dalmierz przystosowany jest do pracy w trudnych warunkach środowisko-
wych. Może być zasilany napięciem stałym z zakresu 10 – 30 V.
Wykorzystywany typ dalmierza jest wyposażony w wyjście analogowe typu prądowego
(istnieją także odmiany z interfejsem cyfrowym, który można przyłączyć bezpośrednio do
magistrali). Zmierzona odległość reprezentowana jest przez określoną wartość prądu na wyj-
ściu. Sygnał prądowy jest znacznie bardziej odporny na zakłócenia niż sygnał napięciowy.
Zakres zmian sygnału prądowego może być wybrany spośród dwóch ustawień: 0 – 20 mA lub
4 – 20 mA. Wybór drugiego z zakresów, przy odpowiednim oprogramowaniu układu prze-
twarzającego wynik pomiaru, pozwala na wykrycie przerwania przewodu sygnałowego. Jeśli
przewód zostanie przerwany, prąd przestanie płynąć. Zmierzona wartość 0 mA leży poza za-
kresem prądów wyjściowych dalmierza, więc świadczy jednoznacznie o uszkodzeniu. Sygnał
wyjściowy dalmierza przyłączono do wejścia prądowego modułu ADAM-4016.
Dalmierz wyposażony jest w prosty panel operatorski, znajdujący się na płycie czoło-
wej, zawierający wyświetlacz oraz trzy przyciski. Umożliwia on odczyt zmierzonej odległości
oraz konfigurację (ustawienia) urządzenia. Konfiguracji podlega zakres wartości prądu wyj-
ściowego oraz zakres mierzonych odległości (reprezentowanych przez sygnał analogowy).
Sposób konfiguracji dalmierza za pomocą panelu przedstawiono w załączniku 1. Kartę kata-
logową dalmierza zawiera załącznik 2.
Napięcie zasilające dla modułów ADAM oraz dalmierza pochodzi z zasilacza napięcia
stałego (24 V). Moduły ADAM przyłączone są bezpośrednio do zasilacza. W obwód zasilają-
cy dalmierza włączono przekaźnik znajdujący się w module ADAM-4060. Pozwala to na
zdalne włączanie i wyłączanie zasilania dalmierza z poziomu komputera nadrzędnego.
Do programowej obsługi modułów ADAM służy komputer PC. Komendy wydawane z
komputera są formatu ciągów znaków ASCII. Ten sam format mają odpowiedzi modułów. W
standardzie RS-485 w danej chwili na magistralę może nadawać tylko jeden moduł. Aby
uniknąć konfliktów w nadawaniu przyjęto konwencję, iż transmisja może być inicjowana
tylko poprzez komputer nadrzędny. Moduły są uprawnione tylko do udzielania odpowiedzi,
gdy komenda wydana z komputera zawiera unikalny adres danego modułu. Do wysyłania
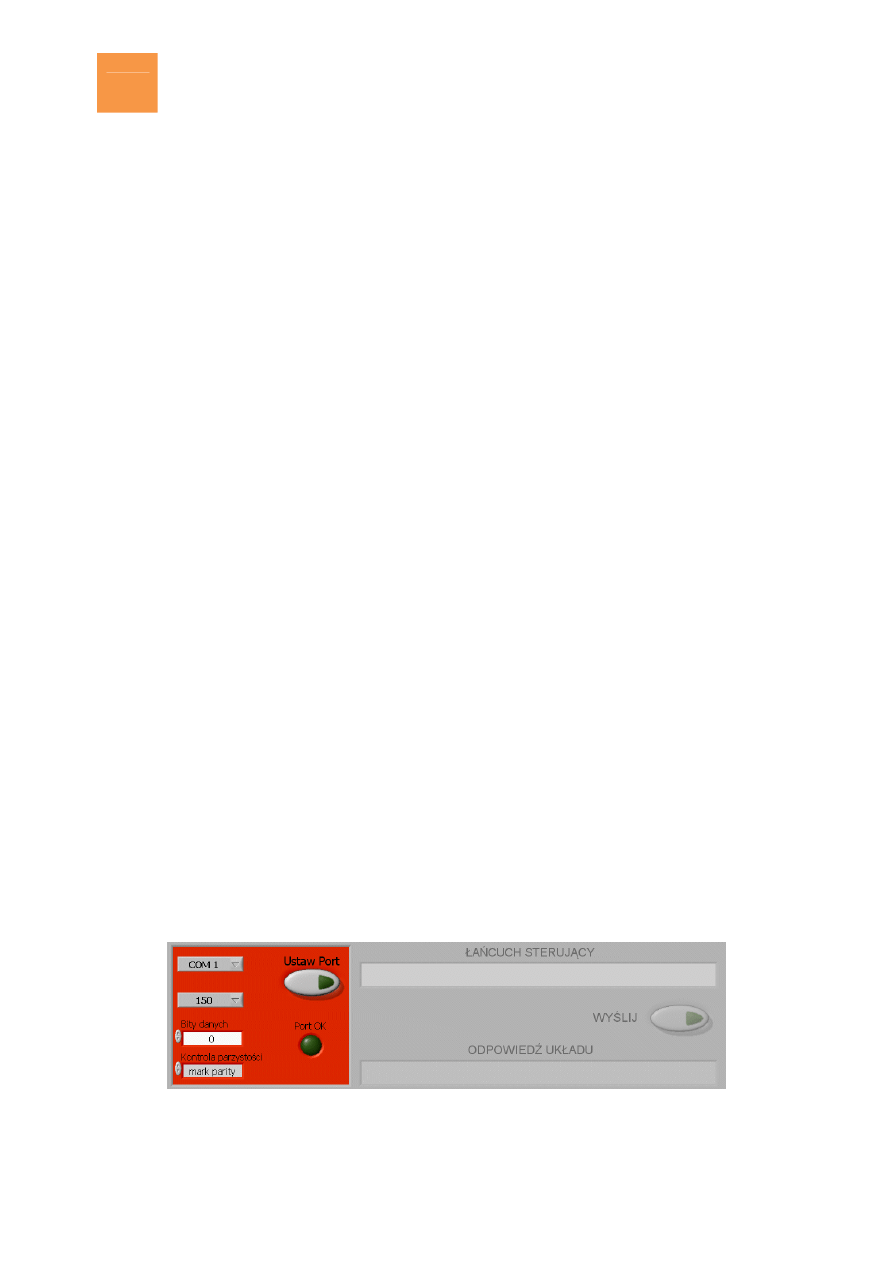
oraz odbierania komend wykorzystywany jest prosty program, którego okno przedstawiono
na rys. 6.
Rys. 6. Okno programu komputera PC

Pomiar i sterowanie w sieci przemysłowej
7
Przed rozpoczęciem wydawania komend program należy skonfigurować do pracy z
magistralą RS-485 poprzez odpowiednie ustawienie szybkości transmisji (9600 b/s), liczby
bitów danych (8) oraz kontroli parzystości (bez kontroli). Błędne ustawienia spowodują, że
wydawane rozkazy nie zostaną poprawnie zinterpretowane przez moduły ADAM.
Każdy moduł ma przypisany unikalny (w danej sieci) adres. Wszystkie rozkazy zaczy-
nają się od adresu modułu (w opisie rozkazów „AA”), do którego adresowane jest polecenie.
Moduły posiadają zbiór realizowalnych komend (ciągi kodów ASCII), zapisanych w pamięci
nieulotnej. Wszystkie litery komend należy pisać dużymi literami. Liczby powinny być zapi-
sane w systemie szesnastkowym. Komenda powinna kończyć się znakiem powrotu karetki
(znak ten dodawany jest automatycznie przez program). Komunikacja z modułami powinna
odbywać się w następujący sposób:
• wysłanie komendy na magistralę RS–485,
• oczekiwanie na odpowiedź od modułu,
• wysłanie kolejnej komendy po otrzymaniu odpowiedzi.
Listy komend dla modułów ADAM-4016 i ADAM-4060 wyszczególniono w załączni-
kach – odpowiednio 3 i 4. W załączniku 5 zawarto opis przykładowych komend. Szczegóło-
wy opis wszystkich komend wyszczególnionych w załącznikach 3 i 4 będzie dostępny pod-
czas ćwiczenia w formie wydruku. Opis ten zawarty jest w [1], dostępnym w Internecie (np.
http://support.elmark.com.pl/advantech/ia/CDROMS/ADAM-4k6k-V2.36/Manual/ADAM-4000/
).
4. PRZEBIEG ĆWICZENIA
Adresy wykorzystywanych modułów ADAM mieszczą się w zakresie E0
h
– EF
h
. Ko-
mendy wydawane podczas ćwiczenia należy formułować uważnie. Nie należy zmieniać pa-
rametrów transmisji oraz adresów modułów.
W trakcie ćwiczenia należy:
a) zapoznać się ze stanowiskiem, w szczególności ze strukturą połączeń w układzie,
b) skonfigurować program komputera PC służący do wydawania komend,
c) przy pomocy oscyloskopu obejrzeć strukturę ramek związanych z przykładowymi
komendami wydawanymi z poziomu komputera PC; przedyskutować format ramek;
zapisać do pliku lub naszkicować wybraną ramkę,
d) ustalić adresy modułów ADAM-4016 oraz ADAM-4060 w sieci,
e) sprawdzić stany wyjść przekaźnikowych modułu ADAM-4060,
f) wysterować odpowiednie wyjście przekaźnikowe modułu ADAM-4060 tak, aby załą-
czyć zasilanie dalmierza,
g) skonfigurować dalmierz przy użyciu panelu (wg wskazań prowadzącego),
h) odczytać dane konfiguracyjne modułu ADAM-4016,
i) zmienić konfigurację modułu ADAM-4016, aby umożliwić odczyt wyniku pomiaru
odległości z dalmierza,
j) zdjąć charakterystykę wartości prądu wyjściowego dalmierza w funkcji odległości
ekranu odbiciowego (dla zakresu nieco szerszego niż ustawiony w dalmierzu –
patrz podpunkt g),

8
Elektronika
k) zbadać działanie pozostałych możliwości modułów ADAM (wg wskazań prowadzą-
cego).
5. SPRAWOZDANIE
W sprawozdaniu należy:
• omówić przebieg ćwiczenia,
• omówić strukturę zapisanej ramki informacji w standardzie RS232,
• umieścić i szczegółowo omówić komendy (ich składnię) wydawane modułom oraz
odpowiedzi na nie,
• wykreślić charakterystykę wartości prądu wyjściowego dalmierza w funkcji odległości
ekranu odbiciowego,
• sformułować ogólne wnioski dotyczące badanego układu.
6. PYTANIA
1. Co oznacza termin „inteligentny czujnik”?
2. Omówić strukturę ramki w standardzie RS232.
3. Na czym polega kontrola parzystości/nieparzystości?
4. Do czego wykorzystywany jest podczas ćwiczenia moduł ADAM-4016 (moduł
wejść/wyjść analogowych oraz cyfrowych)?
5. Do czego wykorzystywany jest podczas ćwiczenia moduł ADAM-4060 (moduł wyjść
przekaźnikowych)?
6. W jaki sposób wydaje się komendy modułom ADAM?
7. W jaki sposób unika się konfliktu polegającego na jednoczesnym nadawaniu na magi-
stralę przez wiele modułów ADAM?
8. Do czego służy panel na płycie czołowej dalmierza?
9. Przedstawić strukturę połączeń stanowiska laboratoryjnego.
10. Omówić sposób zasilenia poszczególnych komponentów stanowiska.
11. Na jakiej podstawie poszczególne moduły rozstrzygają, czy wysłany na magistralę
rozkaz jest adresowany do nich?
12. Czy format odpowiedzi na rozkaz o jednakowej składni (np. $AA2) wydany różnym
modułom może się różnić?
7. ZAGADNIENIA
1. Omówić, z czego wynikają ograniczenia na maksymalną liczbę modułów ADAM
4000 pracujących z jedną magistralą RS-485.
2. Omówić skutki jednoczesnego nadawania na magistralę więcej niż jednego modułu.
LITERATURA
[1] Advantech:
ADAM 4000 Series. Data acquisition modules. User’s Manual. Taiwan,
Advantech 2002.
[2]
Fryśkowski B., Grzejszczyk E.: Systemy transmisji danych. Warszawa: WKŁ, 2010.
Pomiar i sterowanie w sieci przemysłowej
9
[3]
SICK: SENSICK DT-500. Distance Sensor with laser light. Operating Instructions.
Źródła rysunków z okładki: www.connectorsupplier.com, www.advantech.com
10
Elektronika
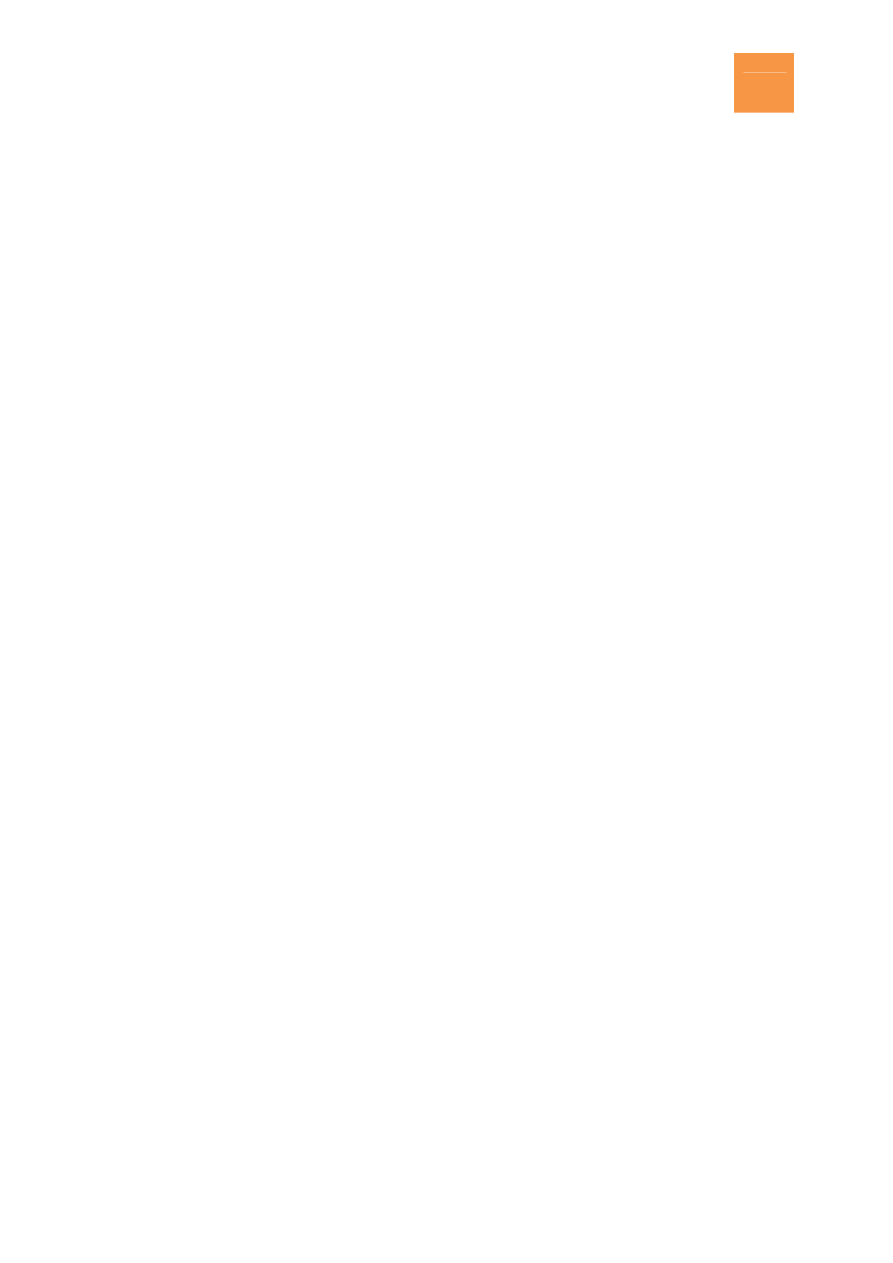
ZAŁĄCZNIK 1
Zmiana ustawień dalmierza DT500 z poziomu panelu na płycie czołowej
1a – zmiana zakresu wyjścia prądowego (0 – 20 mA lub 4 – 20 mA),
1b – zmiana wartości odległości (w metrach) odpowiadającej prądowi 0 (4) mA,
1c – zmiana wartości odległości (w metrach) odpowiadającej prądowi 20 mA,
1d – przejście do trybu wyświetlania wartości mierzonej,
1e – przywrócenie ustawień fabrycznych (4 – 20 mA; 0,2 – 0,8 m)
Pomiar i sterowanie w sieci przemysłowej
11
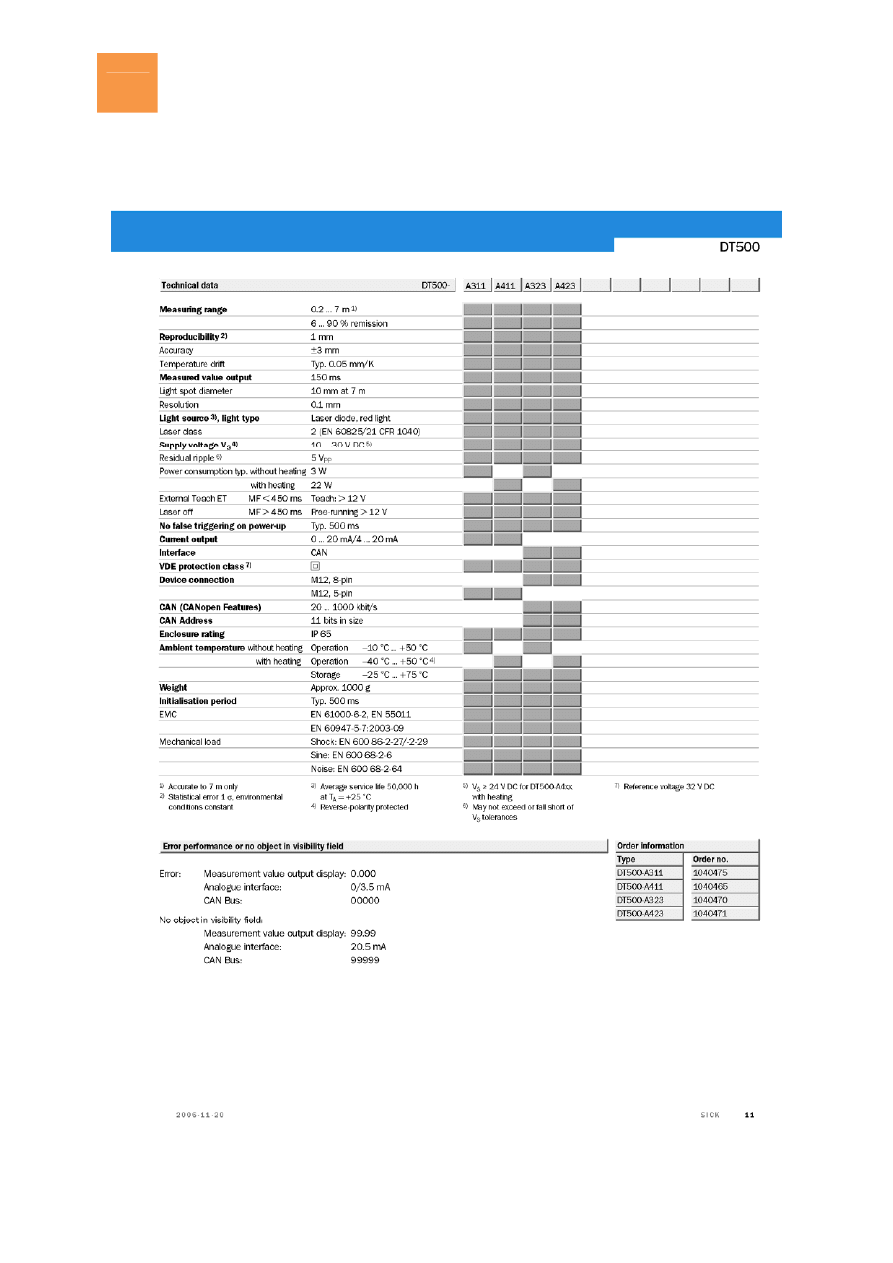
ZAŁĄCZNIK 2
Karta katalogowa dalmierza DT500 (strona 1/2)
12
Elektronika
ZAŁĄCZNIK 2
Karta katalogowa dalmierza DT500 (strona 2/2)
Pomiar i sterowanie w sieci przemysłowej
13
ZAŁĄCZNIK 3
Lista rozkazów modułu ADAM-4016
Składnia
Nazwa rozkazu
Opis rozkazu
%AANNTTCCFF Konfiguracja
Ustawia adres, zakres napięcia wejściowego, szybkość
transmisji, tryb kontroli transmisji, format danych, czas
integracji
#AA Odczyt
z
wejść analogowych
Zwraca zmierzoną wartość wejściową w ustawionym
formacie
$AA0
Kalibracja wzmocnienia
Kalibruje wzmocnienie wejścia analogowego
$AA1 Kalibracja
przesunięcia Kalibruje
przesunięcie wejścia analogowego
$AA2 Status
urządzenia Zwraca
informację o bieżącej konfiguracji modułu
#** Pomiar
synchroniczny
Wyzwala jednoczesny pomiar wielkości z wszystkich
wejść analogowych modułu
$AA4
Odczyt wyników pomiaru
synchronicznego
Zwraca wynik jednoczesnego pomiaru wielkości z
wszystkich wejść analogowych modułu
$AAF
Odczyt wersji oprogramowa-
nia wewnętrznego (firmware)
Zwraca numer wersji oprogramowania wewnętrznego
modułu
$AAM
Odczyt nazwy modułu Zwraca
nazwę modułu
@AADI
Odczyt z wyjść cyfrowych
oraz alarmu
Zwraca stany czterech wyjść cyfrowych oraz statusu
alarmu
@AADO(data) Zapis
do
wyjść cyfrowych
Ustawia stany czterech wyjść cyfrowych
@AAEAT Włączenie sygnalizacji alarmu Uaktywnia sygnalizację alarmu
@AAHI(data)
Ustawienie górnej wartości
dla alarmu
Ustawia górną wartość progową dla alarmu
@AALO(data)
Ustawienie dolnej wartości dla
alarmu
Ustawia dolną wartość progową dla alarmu
@AADA
Wyłączenie sygnalizacji alar-
mu
Dezaktywuje sygnalizację alarmu
@AACA
Wyczyszczenie bitu zatrza-
skowego alarmu
Czyści wartość bitu zatrzaskowego alarmu
@AARH
Odczyt górnej wartości dla
alarmu
Zwraca górną wartość progową dla alarmu
@AARL
Odczyt dolnej wartości dla
alarmu
Zwraca dolną wartość progową dla alarmu
$AA6
Odczyt wartość napięcia wyj-
ściowego
Zwraca ostatnią wartość napięcia wyjściowego ustawio-
ną za pomocą komendy $AA7 lub wartość startową
$AA7
Ustawia bieżącą wartość na-
pięcia wyjściowego
Ustawia wartość napięcia wyjściowego
$AAS
Ustawia startową wartość
napięcia wyjściowego
Ustawia domyślną wartość napięcia wyjściowego
$AAE
Strojenie napięcia wyjścio-
wego
Koryguje napięcie wyjściowe o określoną liczbę jedno-
stek (wyjście dla mostka tensometrycznego)
$AAA
Kalibracja zera napięcia wyj-
ściowego
Kalibruje przesunięcie wyjścia analogowego(wyjście
przewidziane dla mostka tensometrycznego)
$AAB
Kalibracja wzmocnienia na-
pięcia wyjściowego
Kalibruje wzmocnienie wyjścia analogowego(wyjście
przewidziane dla mostka tensometrycznego)
14
Elektronika
ZAŁĄCZNIK 4
Lista rozkazów modułu ADAM-4060
Składnia
Nazwa rozkazu
Opis rozkazu
%AANNTTCCFF Konfiguracja
Ustawia adres, szybkość transmisji, tryb kontroli
transmisji
$AA6 Odczyt
z
wyjść cyfrowych
Zwraca bieżące stany wyjść cyfrowych
#AABB(data) Zapis
do
wyjść cyfrowych
Ustawia stany wyjść cyfrowych
#** Pomiar
synchroniczny
Wyzwala jednoczesny pomiar wielkości z wszystkich
wejść analogowych modułu
$AA4
Odczyt wyników pomiaru
synchronicznego
Zwraca wynik jednoczesnego pomiaru wielkości z
wszystkich wejść analogowych modułu
$AA2 Status
urządzenia Zwraca
informację o bieżącej konfiguracji modułu
$AA5 Status
zerowania
Zwraca informację, czy moduł został wyzerowany od
ostatniego posłużenia się komendą $AA5
$AAF
Odczyt wersji oprogramowa-
nia wewnętrznego (firmware)
Zwraca numer wersji oprogramowania wewnętrznego
modułu
$AAM
Odczyt nazwy modułu Zwraca
nazwę modułu

Pomiar i sterowanie w sieci przemysłowej
15
ZAŁĄCZNIK 5
Przykładowe opisy komend i odpowiedzi dla modułów ADAM
$AAM (ADAM-4016 & ADAM-4060)
Nazwa
Odczyt nazwy modułu
Opis Komenda
żąda od modułu o wskazanym adresie (AA) informacji i jego nazwie
Składnia $AAM
(cr)
$ jest znakiem sterującym rozróżniającym typ rozkazu.
AA (zakres 00÷FF) oznacza dwuznakowy adres modułu zapisany w formacie szesnastkowym.
M
oznacza
komendę odczytu nazwy modułu.
(cr) jest znakiem końca rozkazu – znak powrotu karety (OD
h
)
Odpowiedź !AA(Nazwa
modułu)(cr) jeśli komenda jest poprawna.
Jeśli moduł wykryje błąd składni lub komunikacji lub gdy nie ma modułu o podanym adresie,
odpowiedź nie zostanie udzielona.
! jest znakiem sterującym potwierdzającym poprawny odbiór rozkazu.
AA (z zakresu 00÷FF) oznacza dwuznakowy adres modułu zapisany w formacie szesnastko-
wym. (Nazwa modułu) jest nazwą modułu o podanym adresie.
(cr) jest znakiem końca rozkazu – znak powrotu karety (OD
h
)
$AA2 (ADAM-4016)
Nazwa Status
urządzenia
Opis Komenda
żąda od modułu o wskazanym adresie (AA) informacji i jego konfiguracji.
Składnia $AA2(cr)
$ jest znakiem sterującym rozróżniającym typ rozkazu.
AA (zakres 00÷FF) oznacza dwuznakowy adres modułu zapisany w formacie szesnastkowym.
2
oznacza
komendę odczytu danych konfiguracyjnych.
(cr) jest znakiem końca rozkazu – znak powrotu karety (OD
h
).
Odpowiedź !AATTCCFF(cr)
jeśli komenda jest poprawna.
?AA(cr)
jeśli komenda jest niepoprawna.
Jeśli moduł wykryje błąd składni lub komunikacji lub gdy nie ma modułu o podanym adresie,
odpowiedź nie zostanie udzielona.
! jest znakiem sterującym potwierdzającym poprawny odbiór rozkazu.
? jest znakiem sterującym oznaczającym niepoprawny odbiór rozkazu.
AA (z zakresu 00÷FF) oznacza dwuznakowy adres modułu zapisany w formacie szesnastko-
wym.
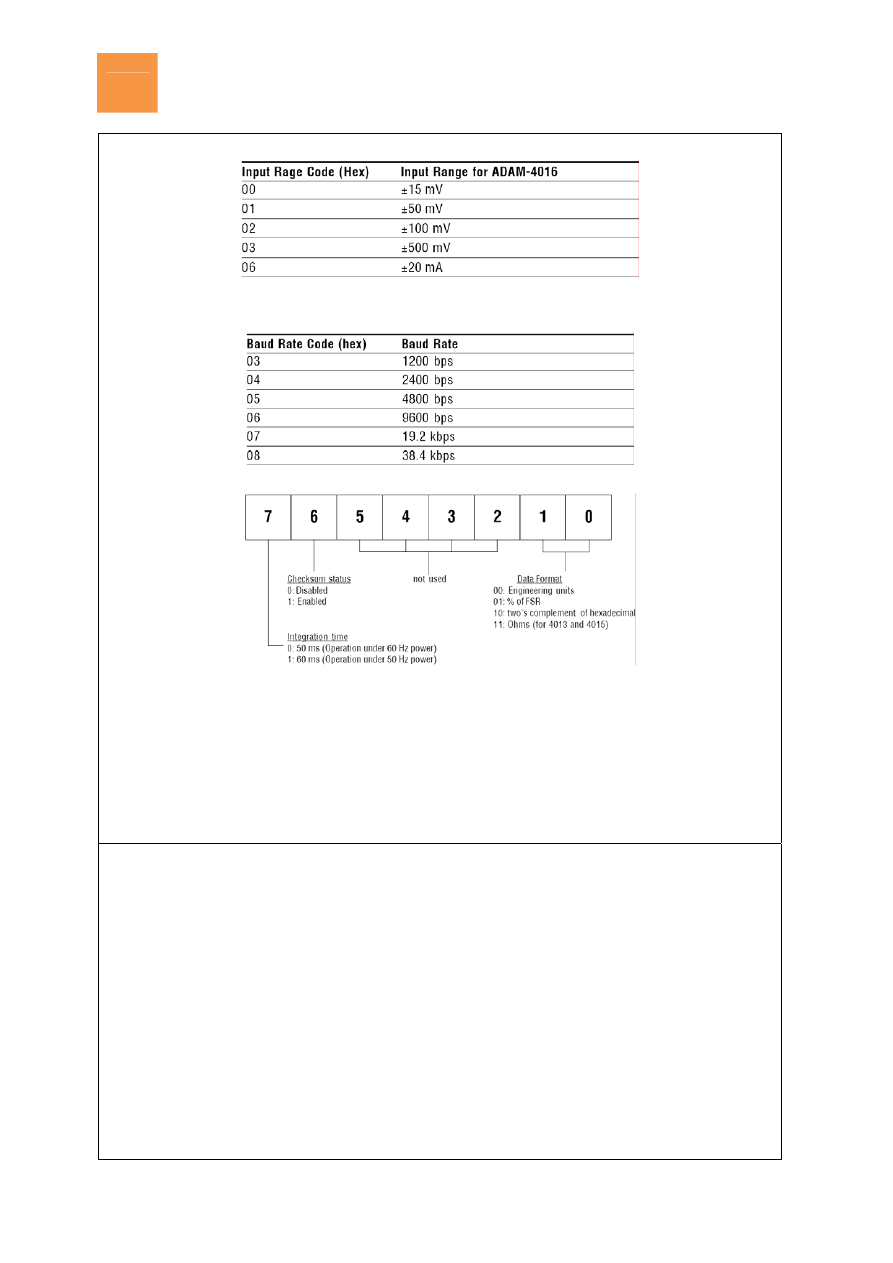
TT jest kodem zawierającym informację o zakresie pomiarowym (p. Tabl. Z5-1).
CC jest kodem zawierającym informację o szybkości transmisji (p. Tabl. Z5-2).
FF zawiera informację o formacie danych, kontroli transmisji i czasie integracji (p. Rys. Z5-
1).
(cr) jest znakiem końca rozkazu – znak powrotu karety (OD
h
).
16
Elektronika
Tabl. Z5-1 Kody zakresu wejściowego dla modułu ADAM-4016
Tabl. Z5-2 Kody prędkości transmisji dla modułu ADAM-4016
Rys. Z5-1. Struktura bitowa pola FF dla modułu ADAM-4016
Przykład komenda:
$452(cr)
odpowiedź: !45030600(cr)
Komenda
żąda od modułu o adresie 45
h
informacji i jego konfiguracji.
Moduł o adresie 45
h
odpowiada: zakres pomiarowy
±500 mV; szybkość transmisji 9600 bps,
czas integracji 50 ms; format danych inżynierski; suma kontrolna nieaktywna.
$AA2 (ADAM-4060)
Nazwa Status
urządzenia
Opis Komenda
żąda od modułu o wskazanym adresie (AA) informacji i jego konfiguracji.
Składnia $AA2(cr)
$ jest znakiem sterującym rozróżniającym typ rozkazu.
AA (zakres 00÷FF) oznacza dwuznakowy adres modułu zapisany w formacie szesnastkowym.
2
oznacza
komendę odczytu danych konfiguracyjnych.
(cr) jest znakiem końca rozkazu – znak powrotu karety (OD
h
).
Odpowiedź !AATTCCFF(cr)
jeśli komenda jest poprawna.
?AA(cr)
jeśli komenda jest niepoprawna.
Jeśli moduł wykryje błąd składni lub komunikacji lub gdy nie ma modułu o podanym adresie,
odpowiedź nie zostanie udzielona.
Pomiar i sterowanie w sieci przemysłowej
17
! jest znakiem sterującym potwierdzającym poprawny odbiór rozkazu.
? jest znakiem sterującym oznaczającym niepoprawny odbiór rozkazu.
AA (z zakresu 00÷FF) oznacza dwuznakowy adres modułu zapisany w formacie szesnastko-
wym.
TT ma zawsze wartość 40.
CC jest kodem zawierającym informację o szybkości transmisji (p. Tabl. Z5-3).
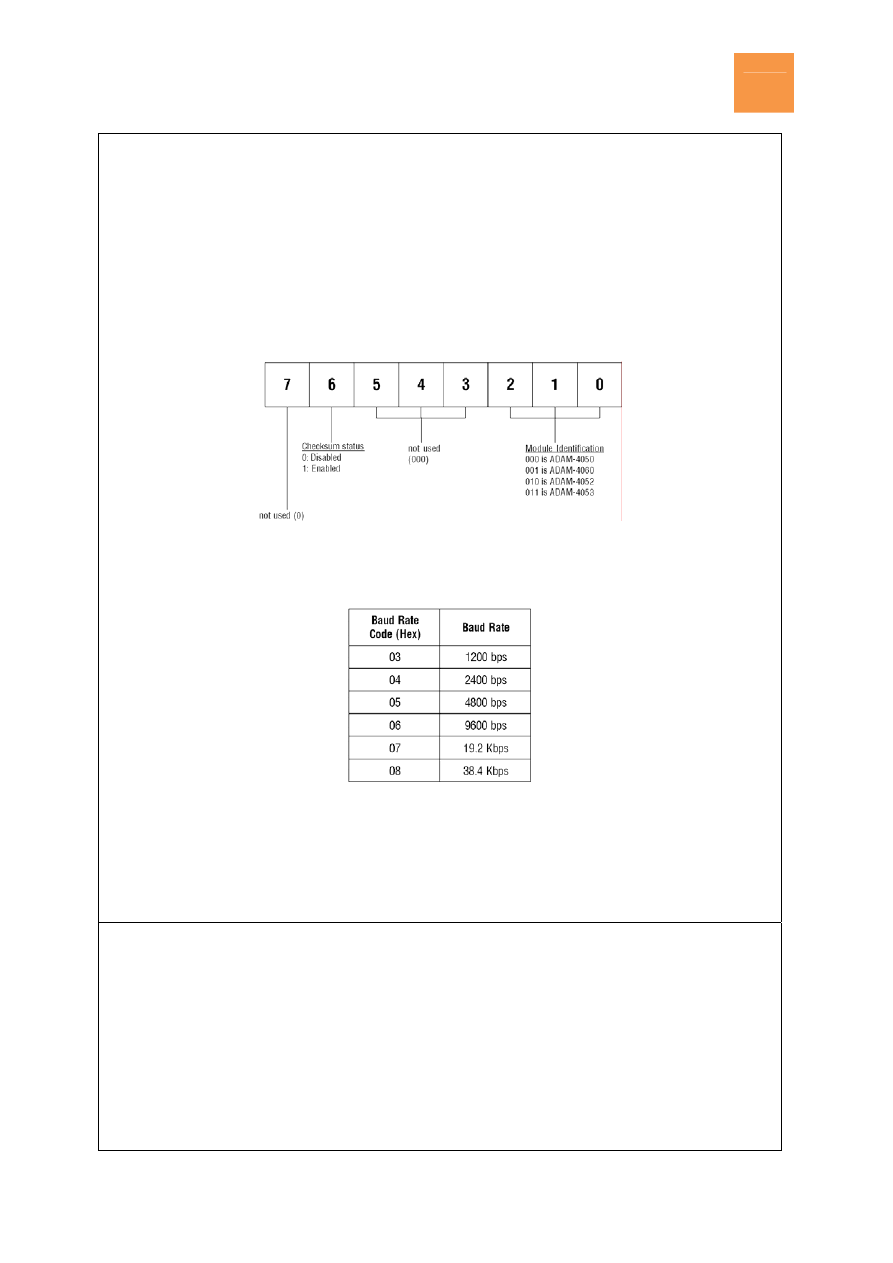
FF zawiera informację o kontroli transmisji i typie modułu (p. Rys. Z5-2).
(cr) jest znakiem końca rozkazu – znak powrotu karety (OD
h
).
Rys. Z5-1. Struktura bitowa pola dla modułu ADAM-4016
Tabl. Z5-3 Kody prędkości transmisji dla modułu ADAM-4060
Przykład
komenda: $452 (cr)
odpowiedź: !45400601 (cr)
Komenda
żąda od modułu o adresie 45
h
informacji i jego konfiguracji.
Moduł o adresie 45
h
odpowiada: szybkość transmisji 9600 bps, typ modułu ADAM-4060.
%AANNTTCCFF (ADAM-4016)
Nazwa Konfiguracja
Opis
Ustawia adres, zakres pomiarowy, szybkość transmisji, format danych, status sumy kontrolnej
i czas integracji.
Składnia %AANNTTCCFF(cr)
% jest znakiem sterującym rozróżniającym typ rozkazu.
AA (zakres 00÷FF) oznacza dwuznakowy adres modułu zapisany w formacie szesnastkowym.
NN(zakres 00÷FF) oznacza nowy dwuznakowy adres modułu zapisany w formacie szesnast-
kowym (w przypadku braku zmiany adresu należy powtórzyć wartość pola AA).

18
Elektronika
TT jest kodem ustawiającymzakres pomiarowy (p. Tabl. Z5-1); .
CC jest kodem ustawiającym szybkość transmisji (p. Tabl. Z5-2).
FF ustawia format danych, kontrolę transmisji i czas integracji (p. Rys. Z5-1).
Odpowiedź !AA(cr)
jeśli komenda jest poprawna.
?
AA(cr)
jeśli wprowadzono niepoprawny parametr lub gdy zacisk INIT* nie został zwarty do
masy podczas próby zmiany szybkości transmisji albo ustawienia sumy kontrolnej.
Jeśli moduł wykryje błąd składni lub komunikacji lub gdy nie ma modułu o podanym adresie,
odpowiedź nie zostanie udzielona.
! jest znakiem sterującym potwierdzającym poprawny odbiór rozkazu.
? jest znakiem sterującym oznaczającym niepoprawny odbiór rozkazu.
AA (z zakresu 00÷FF) oznacza dwuznakowy adres modułu zapisany w formacie szesnastko-
wym.
(cr) jest znakiem końca rozkazu – znak powrotu karety (OD
h
).
Przykład komenda:
%2324030600(cr)
odpowiedź: !24(cr)
Komenda
konfiguruje
moduł ADAM4016 o adresie 23
h
w następujący sposób: nowy adres
24h; zakres wejściowy
±500 mV, czas integracji 50 ms; dane w formacie inżynierskim, brak
sprawdzania sumy kontrolnej.
Odpowiedź oznacza, ze komenda konfiguracyjna została przyjęta. Należy odczekać 7 s, aby
nowe parametry zostały zaprogramowane.
Pomiar i sterowanie w sieci przemysłowej
19
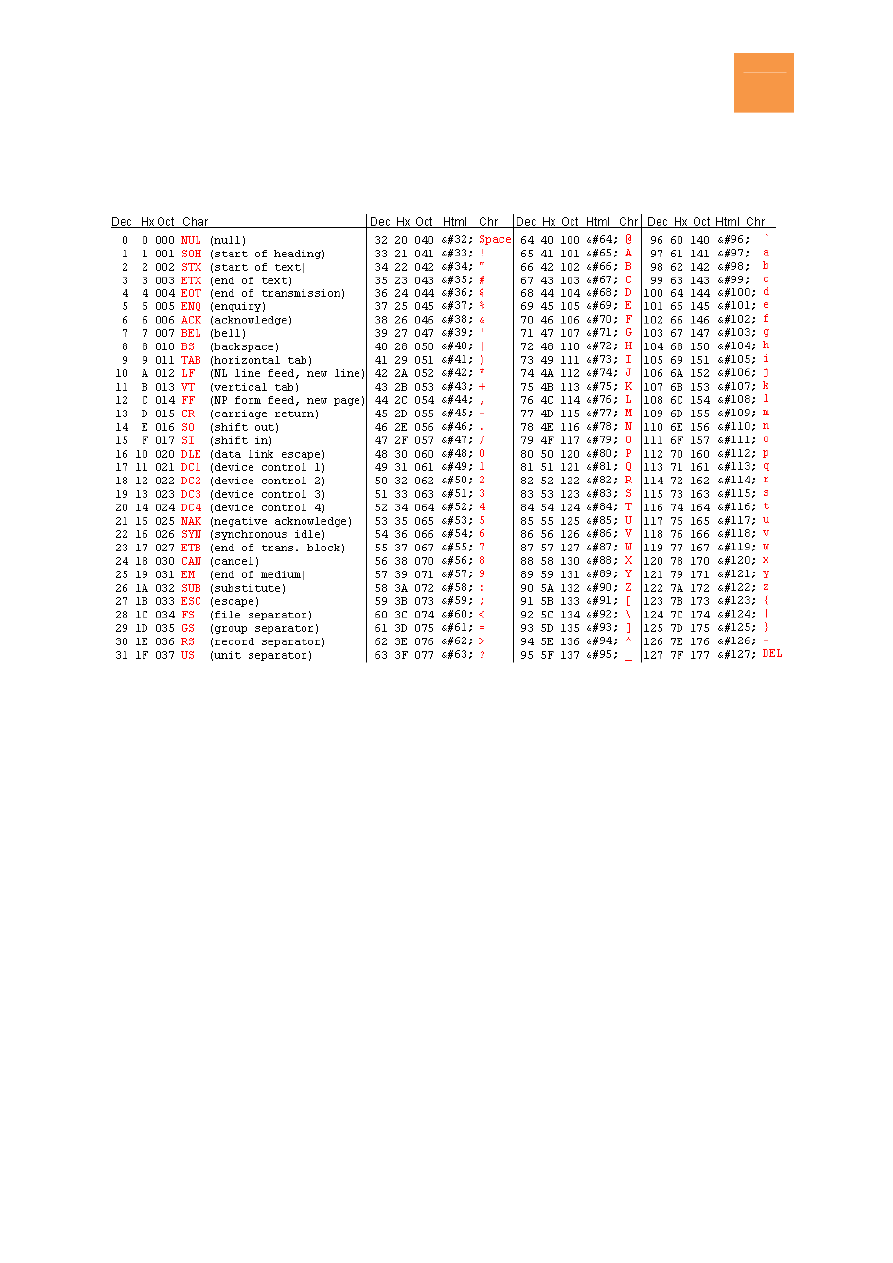
ZAŁĄCZNIK 6
Kody ASCII
(źródło: www.lookuptables.com)
Wyszukiwarka
Podobne podstrony:
MM CW4L nowe
MM CW5L nowe
MM CW7L nowe
integracja-mm, chomikowane nowe, cybernetyka
informacja-mm, chomikowane nowe, cybernetyka
homeostaza-mm, chomikowane nowe, cybernetyka
MM CW6L nowe
hnpn-mm, chomikowane nowe, cybernetyka
ems-mm, chomikowane nowe, cybernetyka
MM CW5L nowe
MM CW6L nowe
MM CW5L nowe
zajcia 3 nowe
style nowe
Rozrˇd Šwiczenia nowe
pytania nowe komplet
więcej podobnych podstron