
Spis treści
Wstęp 9
Część I. Statyka
Wprowadzenie 12
Elementy rachunku wektorowego 13
1. Układy płaskie w przypadku więzów idealnych 16
1.1. Twierdzenie o trzech siłach 16
1.2. Płaski układ sił zbieżnych 25
1.3. Redukcja dowolnego płaskiego układu sił 29
1.4. Równowaga układu sił równoległych 33
1.5. Układy poddane obciążeniom rozłożonym w sposób ciągły 37
1.6. Dowolny płaski układ sił 43
1.7. Kratownice 55
2. Równowaga płaskiego układu sił z uwzględnieniem
sił tarcia 60
3. Przestrzenny układ sił 81
3.1. Wprowadzenie 81
3.2. Redukcja dowolnego przestrzennego układu sił 83
3.3. Układ sił zbieżnych pozostających w równowadze 87
3.4. Dowolny przestrzenny układ sił pozostających w równowadze 91
3.5. Środek sił równoległych i środki ciężkości linii, powierzchni
i brył 99
4. Równowaga wiotkich lin ciężkich — zastosowania
techniczne 113

Część II. Kinematyka
5. Kinematyka punktu 120
Wprowadzenie 120
5.1. Kinematyka punktu we współrzędnych krzywoliniowych 121
5.2. Kinematyka punktu w układzie kartezjańskim 124
5.3. Kinematyka punktu w układzie naturalnym 137
5.4. Kinematyka punktu we współrzędnych krzywoliniowych — układy
biegunowy, cylindryczny, sferyczny, toroidalny 144
6. Ruch obrotowy bryły wokół stałej osi 154
7. Ruch płaski 160
7.1. Wprowadzenie 160
7.2. Przykłady obliczania prędkości punktów ciała w ruchu
płaskim 163
7.3. Przyspieszenie punktów ciała w ruchu płaskim 174
8. Ruch kulisty bryły 211
8.1. Wprowadzenie 211
8.2. Wyznaczanie prędkości kątowych i przyspieszenia kątowego
za pomocą kątów Eulera 213
8.3. Przykłady obliczania prędkości i przyspieszeń punktów ciała
w ruchu kulistym 215
9. Ruch złożony punktu 226
9.1. Wprowadzenie 226
9.2. Przykłady obliczania prędkości bezwzględnych i przyspieszeń
bezwzględnych w ruchu złożonym punktu 228
Część III. Dynamika
10. Dynamika punktu 240
Wprowadzenie 240
10.1. Zadania proste 243
10.2. Zadania odwrotne — całkowanie równań różniczkowych
ruchu 256
10.3. Ruch krzywoliniowy 285
10.4. Drgania o jednym stopniu swobody — drgania własne 293
10.5. Drgania wymuszone 311
10.6. Praca i moc, potencjał pola sił 326
10.7. Zasada równowartości energii kinetycznej i pracy oraz
zasada zachowania energii mechanicznej 333
Spis treści

Spis treści
11. Zadania specjalne dynamiki punktu 350
11.1. Dynamika punktu w ruchu względnym 350
11.2. Ruch punktu w polu środkowym 360
11.3. Wybrane zadania z dynamiki punktu o zmiennej
masie 372
12. Geometria mas 385
12.1. Pojęcia podstawowe 385
12.2. Przykłady znajdowania momentów bezwładności
i momentów dewiacji 389
13. Dynamika układu punktów materialnych 400
13.1. Równania ruchu układu punktów materialnych 400
13.2. Zasada ruchu środka masy 407
13.3. Kręt i zasada krętu dla układu punktów
materialnych 420
14. Ruch obrotowy bryły dookoła stałej osi 427
14.1. Metoda kinetostatyki 427
14.2. Reakcje dynamiczne w ruchu obrotowym bryły dookoła
stałej osi 437
14.3. Równania różniczkowe w ruchu obrotowym dookoła
stałej osi 446
15. Ruch płaski ciała sztywnego 460
16. Przybliżona teoria giroskopu 478
17. Elementy mechaniki analitycznej 486
17.1. Zasada prac przygotowanych 486
17.2. Zasada d'Alamberta i równania Lagrange'a I rodzaju 503
17.3. Równania Lagrange'a II rodzaju 510
18. Wyznaczanie położenia równowagi 538
19. Zderzenia 552
Literatura 575
Wstęp
Podręcznik jest przeznaczony dla studentów studiów magister
skich i zawodowych kierunków: mechanika i budowa maszyn,
automatyka i robotyka, inżynieria materiałowa i transport. Za
pewne będzie też przydatny na innych kierunkach studiów,
takich jak budownictwo, wychowanie techniczne, inżynieria
środowiska.
Należytemu zrozumieniu i opanowaniu mechaniki ogólnej
dobrze służą przykłady zastosowań praktycznych.
Książka składa się z trzech części: statyki, kinematyki
i dynamiki. Znajduje się w niej wiele różnorodnych przykła
dów z mechaniki dobranych w ten sposób, aby Czytelnik mógł
samodzielnie rozwiązywać zadania należące do danego działu
mechaniki. Rozdziały zaczynają się krótkim wstępem zawie
rającym podstawowe pojęcia i twierdzenia, po czym następują
przykłady z rozwiązaniami. Na końcu każdego rozdziału znaj
dują się zadania, do rozwiązania których Autor gorąco zachęca
Czytelników.
Zadania i przykłady oznaczone gwiazdką studenci stu
diów zawodowych mogą pominąć.


Zadania, z którymi spotykamy się w statyce, można podzielić
na dwie grupy. Do grupy pierwszej zaliczamy zadania zwią
zane z równowagą układu sił, do drugiej — z redukcją ukła
du sił.
W obydwu przypadkach przy rozwiązywaniu zadań mo
żemy posługiwać się zarówno metodami analitycznymi, jak
i graficznymi. My będziemy stosować metody anali
tyczne.
Metody graficzne są nieocenione przy rozwiązywa
niu płaskich układów prętowych (kratownic), jednak z rozwo
jem metod komputerowych straciły one na znaczeniu. Omó
wimy stosowanie metod analitycznych związanych z rozpa
trywaniem równowagi układu sił. Przed przystąpieniem do
rozwiązania zadania należy:
• zobaczyć, czy mamy do czynienia z układem prostym
(jedno ciało sztywne), czy złożonym (kilka ciał powią
zanych ze sobą). W tym ostatnim przypadku należy
rozbić myślowo układ złożony na układy proste, pa
miętając o tym, że siły oddziaływania jednego ciała na
drugie występują zawsze dwójkami zerowymi;
• zaznaczyć wszystkie siły czynne działające na dane
ciało;
• ustalić więzy (ograniczenia nałożone na ruch) bezpo
średnio działające na dane ciało, a następnie oswobo
dzić ciało od więzów, zastępując odrzucone myślowo
więzy siłami reakcji;
• zakwalifikować otrzymany układ sił czynnych i bier
nych działających na dane ciało do odpowiedniej grupy
(układ płaski, przestrzenny, zbieżny, równoległy, do
wolny);
Elementy rachunku wektorowego
• określić liczbę niezależnych równań równowagi, które
możemy ułożyć dla danego układu;
• rozstrzygnąć, czy mamy do czynienia z układem sta
tycznie wyznaczalnym, czy liczba niewiadomych reak
cji nie przekracza liczby równań równowagi;
• wybrać układ współrzędnych tak, aby otrzymać możli
wie najprostszy układ równań i ułożyć równania rów
nowagi;
• rozwiązać układ równań ze względu na poszukiwane
wielkości, sprawdzić ich miary, przeprowadzić dyskusję
błędów.
W wielu zadaniach nie można z góry przewidzieć kie
runku reakcji. W tym przypadku należy reakcję o nieznanym
kierunku rozłożyć na składowe wzdłuż osi układu współrzęd
nych. Jeżeli z obliczeń otrzymamy składową ujemną, będzie
to oznaczać, że zwrot danej reakcji należy zmienić na prze
ciwny.
Elementy rachunku wektorowego
Spotykane w naukach fizycznych wielkości są wielkościami
wektorowymi lub skalarnymi. Wielkości skalarne określa się
przez podanie ich wartości. Przykładami takich wielkości są:
masa, praca, moc, energia, czas, potencjał itp. Wielkości wek
torowe
określa się przez podanie wartości, kierunku i zwrotu.
Przykładami wektorów są: siła, moment siły, prędkość, przy
spieszenie, pęd, kręt itp.
Wektory reprezentujące wielkości fizyczne oprócz poda
nych trzech cech powinny mieć określone w danej przestrzeni
położenie. Z tego względu definiuje się trzy typy wek
torów.
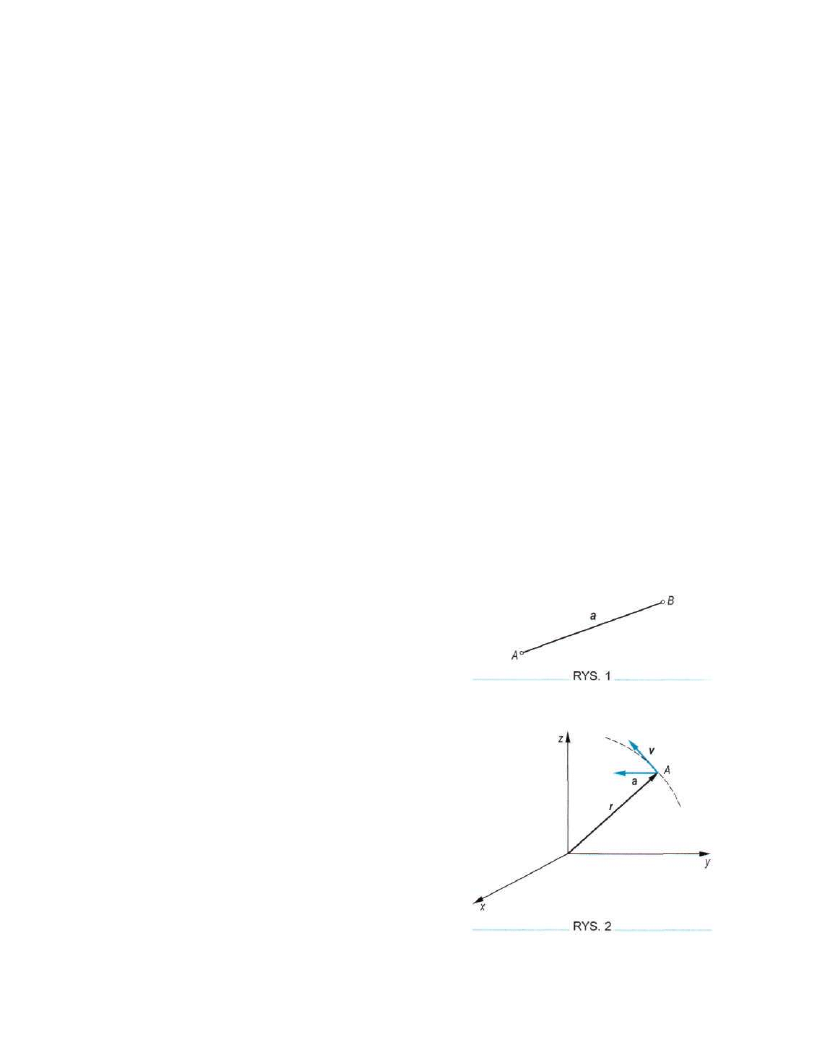
Wektor zaczepiony w dowolnej przestrzeni jest to upo
rządkowana para punktów (A, B). Geometryczny obraz ta
kiego wektora jest przedstawiony na rys. 1. Wektor ozna
czono literą a; można go również oznaczać AB lub (A, B).
Przykładami wektora zaczepionego mogą być:
• wektor wodzący ruchu punktu, jego prędkość lub przy
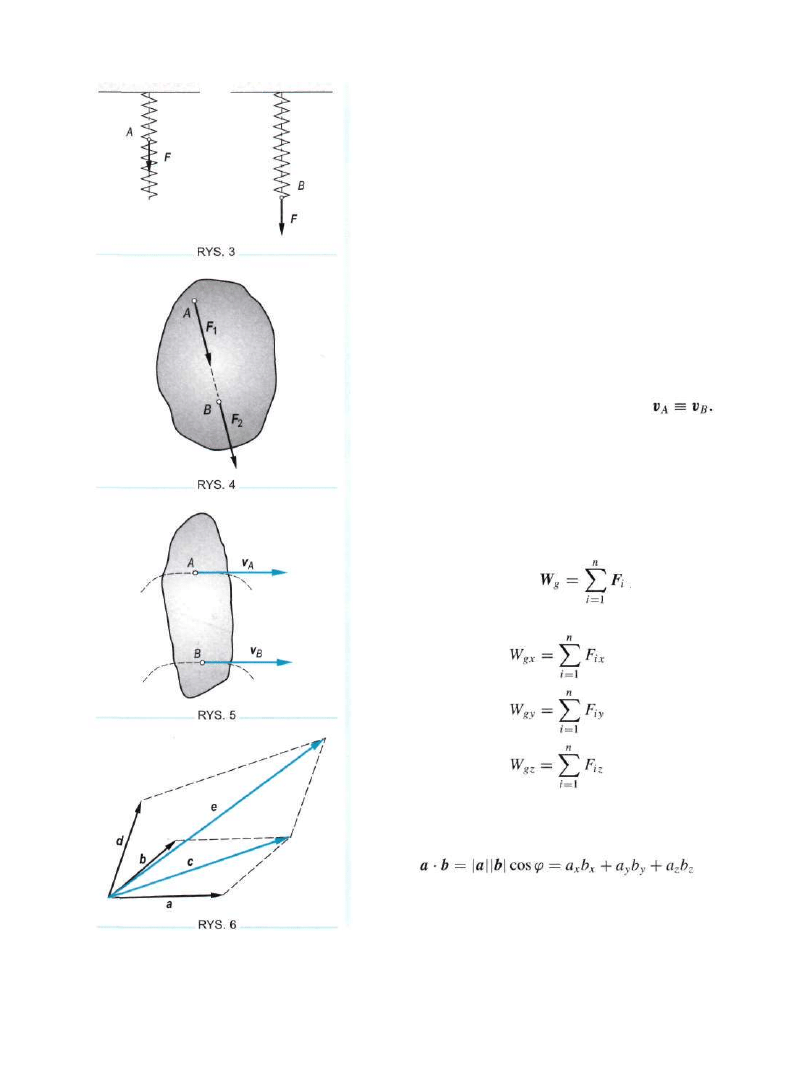
spieszenie (rys. 2)
r = r(t)
v = v(t)
a = a(t)
Wprowadzenie
• siła przyłożona do ciała odkształcalnego (rys. 3). Siła
przyłożona do sprężyny w punkcie A spowoduje inny
skutek (odkształcenie) niż siła zaczepiona w punkcie B.\
Wektor przesuwny lub ślizgający się. Istotnymi cechami
takiego wektora są: wartość liczbowa, zwrot i linia działania
(nieistotny jest jego punkt przyłożenia) — rys. 4
|Fi| = | F
2
|
Skutek działania na ciało idealnie sztywne siły Fi zaczepionej
w punkcie A jest taki sam, jak siły F
2
zaczepionej w punk
cie B Fi = F
2
.
Wektor swobodny. Istotnymi cechami takiego wektora
są: wartość liczbowa, zwrot i kierunek. Przykładami takicl
wektorów mogą być: moment pary sił, prędkość i przyspie
szenie punktów bryły w ruchu postępowym (rys. 5). Wektory
prędkości punktów A i B są nierozróżnialne
Działania na wektorach
Dodawanie wektorów.
Suma dwóch wektorów a + b jei
wektorem leżącym na przekątnej równoległoboku rozpiętego
na wektorach a i b. Dodawanie wektorów jest przemienni
a+b = b+a
oraz obowiązuje zasada superpozycji a+b+d =
= e = (a + b)+d = c + d (rys. 6). Jeżeli znamy wspoł-
rzędne n wektorów Fi(F
ix
, Fj
y
, F
iz
)
zaczepionych w tym sa
mym punkcie, to ich suma jest wektorem, któ-
rego współrzędne są równe
Iloczyn skalarny
dwóch wektorów jest skalarem (liczbi
(rys. 7) '
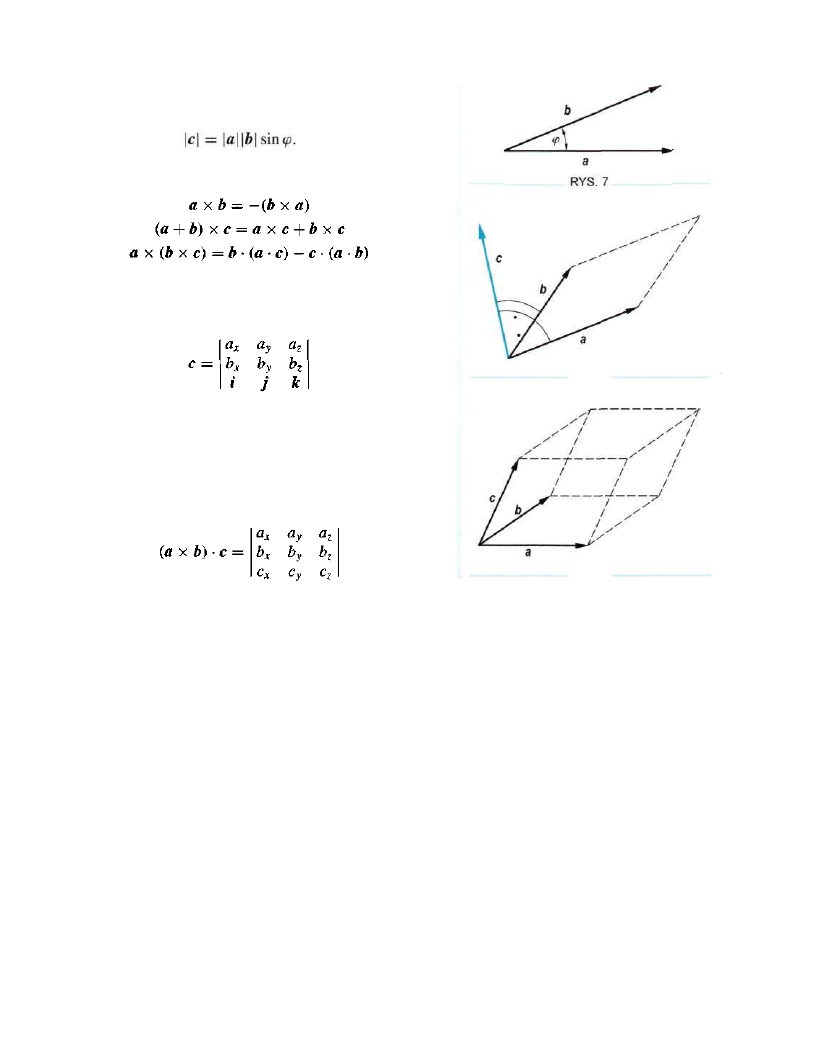
Iloczyn wektorowy
dwóch wektorów jest wektorei
(rys. 8) '
Elementy rachunku wektorowego
15
c
= a x b
Wektor c jest prostopadły do wektorów a i b, jego wartość
gdzie: i, j,k są wersorami (leżącymi odpowiednio na osiach
x, y, z).
Iloczyn mieszany
trzech wektorów (a x b) c jest liczbą. Jej
wartość jest równa objętości równoleglościanu rozpiętego na
tych wektorach (rys. 9). Jeżeli znamy współrzędne wektorów
a, b, c,
to
RYS. 8
RYS. 9
Jeżeli znamy współrzędne dwóch wektorów a(a
x
,a
y
,a
z
)
i b(b
x
,b
y
,b
z
),
to współrzędne wektora c = a x b wyliczamy
z wyznacznika
liczbowa jest równa
Układ wektorów a, b, c tworzy trójkę prawoskrętną. Za
chodzą związki
1
Układy płaskie w przypadku
więzów idealnych
1.1
Twierdzenie o trzech siłach
Jednym z najprostszych układów płaskich jest układ trzech sił.
Przypomnijmy t w i e r d z e n i e o t r z e c h siłach: warun
kiem koniecznym i wystarczającym na to, aby układ trzech sił
nierównoległych, leżących w jednej płaszczyźnie pozostawał
w równowadze jest, aby linie działania tych sił przecinały się
w jednym punkcie, a same siły tworzyły trójkąt zamknięty.
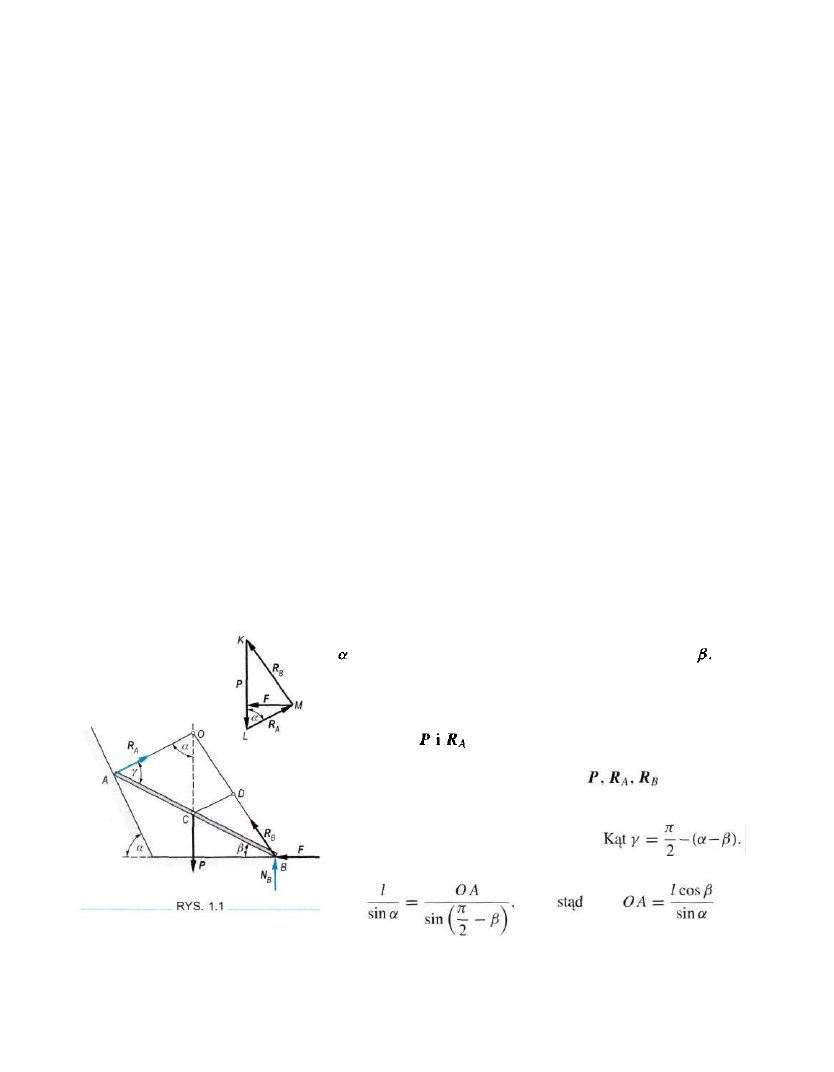
PRZYKŁAD 1.1 Wyznaczyć siłę F utrzymującą jednorodną belkę AB = 21
o ciężarze P w położeniu równowagi. Belka opiera się
o dwie gładkie płaszczyzny: poziomą i nachyloną pod kątem
ROZWIĄZANIE
Na belkę działają trzy siły [P, R
A
, R
B
]
pozostające w równo
wadze. Siły przecinają się w punkcie O. Zatem kieru
nek reakcji RB (która składa się z siły F i reakcji płaszczyzny
N
B
)
przechodzi przez punkt O. Siły tworzą trój
kąt KLM. Poprowadzimy odcinek CD równoległy do odcinka
AO.
Widzimy, że trójkąty OCD i KLM są podobne. Łatwo
możemy wyznaczyć boki trójkąta O AC.
Z twierdzenia sinusów otrzymujemy
(rys. 1.1). Belka tworzy z płaszczyzną poziomą kąt
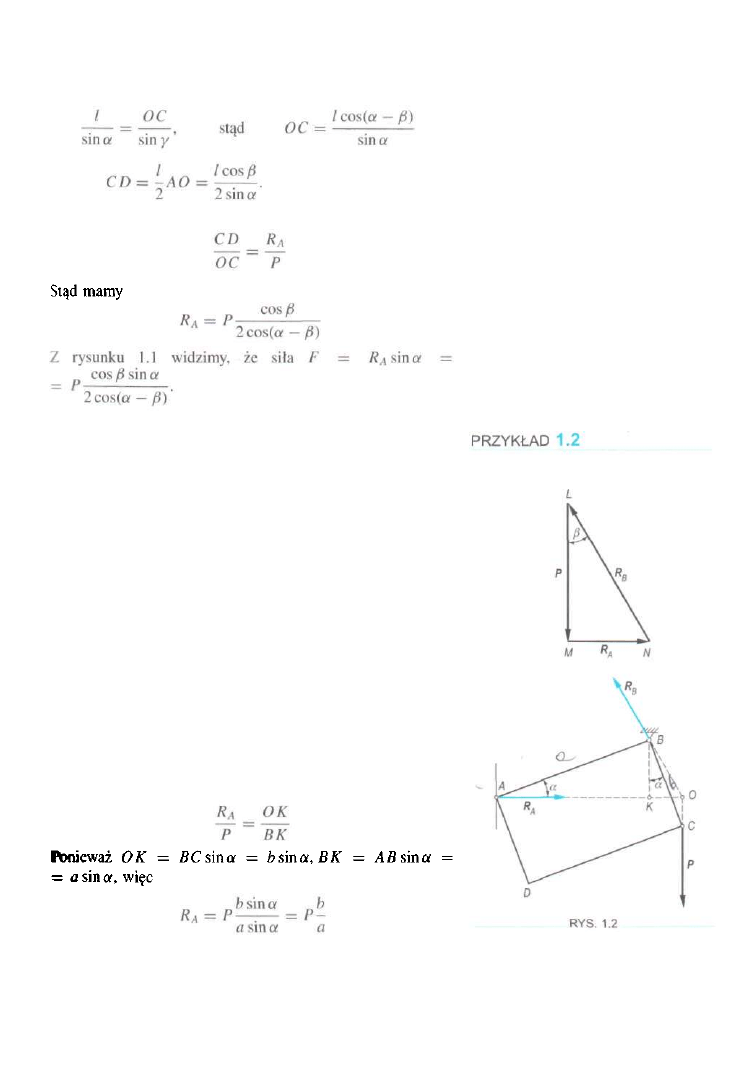
Prostokątna płytka ABCD o bokach AB = a i BC — b jest
umocowana za pomocą przegubu w punkcie B i opiera się
o gładką ścianę w punkcie A. Płytka obciążona jest w punk
cie C siłą P (rys. 1.2). Zaniedbując ciężar płytki, wyznaczyć
reakcję ściany R
A
i przegubu R
B
.
ROZWIĄZANIE
Na podstawie warunków zadania na ciało działają trzy siły,
z których jedna jest znana. Kierunek reakcji ściany jest rów
nież znany, jest on prostopadły do ściany. Siły P i R
A
przecinają
się w punkcie O (rys. 1.2). Na podstawie twierdzenia
o trzech siłach przez ten punkt musi przejść również linia
działania trzeciej siły RB, o której wiadomo, że jest zacze
piona w punkcie B. Kierunek reakcji RB pokrywa się więc
z kierunkiem OB. Układ sił [R
A
, R
B
, P]
będzie w równowa
dze, jeżeli dodatkowo siły te będą tworzyć trójkąt zamknięty.
Oznaczmy wierzchołki tego trójkąta: L, M, N. Z rysunku wi
dzimy, że trójkąt LMN jest podobny do trójkąta BKO. Stąd
wynika, że
i podobnie
Odcinek
Z podobieństwa trójkątów OCD i KLM dostajemy
ze związków w trójkącie LMN dostajemy zaś
Jak widać wartości reakcji nie zależą od kąta a.
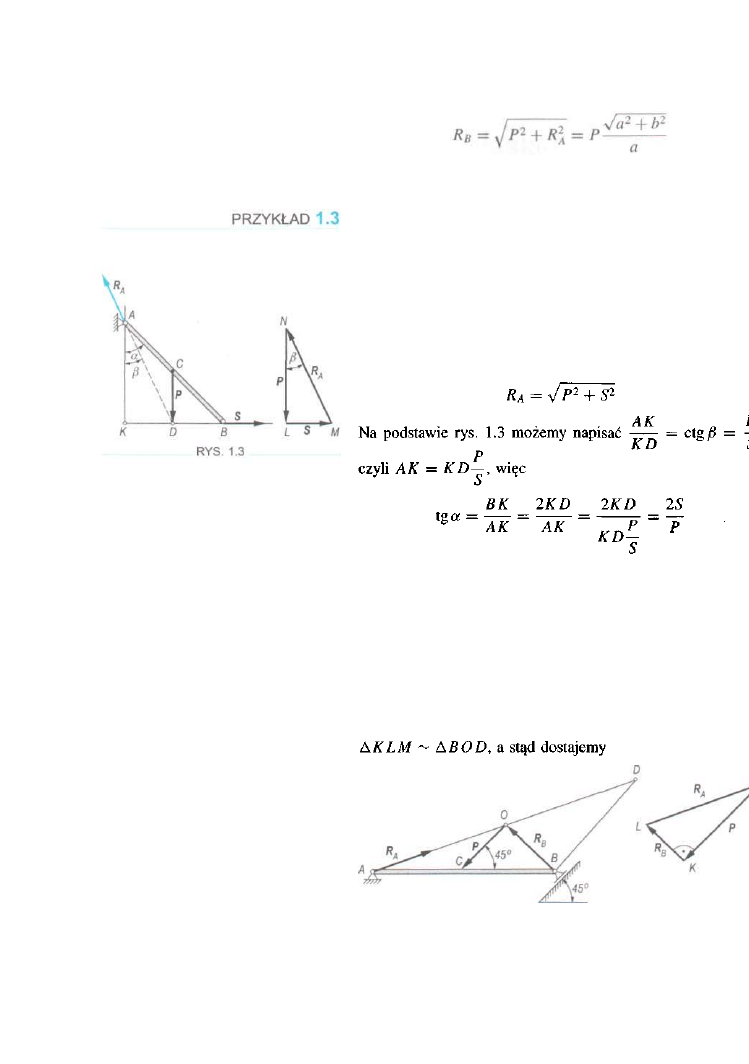
Jednorodny pręt AB o długości 21 i ciężarze P jest zamoc
wany za pomocą przegubu płaskiego A i utrzymywany w p
łożeniu jak na rys. 1.3 poziomą siłą S. Wyznaczyć reakc
przegubu A oraz kąt a w położeniu równowagi.
ROZWIĄZANIE
Z twierdzenia o trzech siłach wyznaczamy linię działania r
akcji R
A
.
Z trójkąta LMN obliczamy
Belka AB o długości 2/ jest obciążona w środku siłą P, dzia
łającą pod kątem fi — 45° w stosunku do poziomu. Wyzna
czyć reakcje przegubu A i podpory przesuwnej B. Ciężar belki
zaniedbać.
ROZWIĄZANIE
Wszystkie trzy siły przecinają się w punkcie O. Poprowadźr
odcinek BD równoległy do OC. Z rysunku 1.4 widzimy,
1.1. Twierdzenie o trzech siłach 19
Ponieważ
zatem
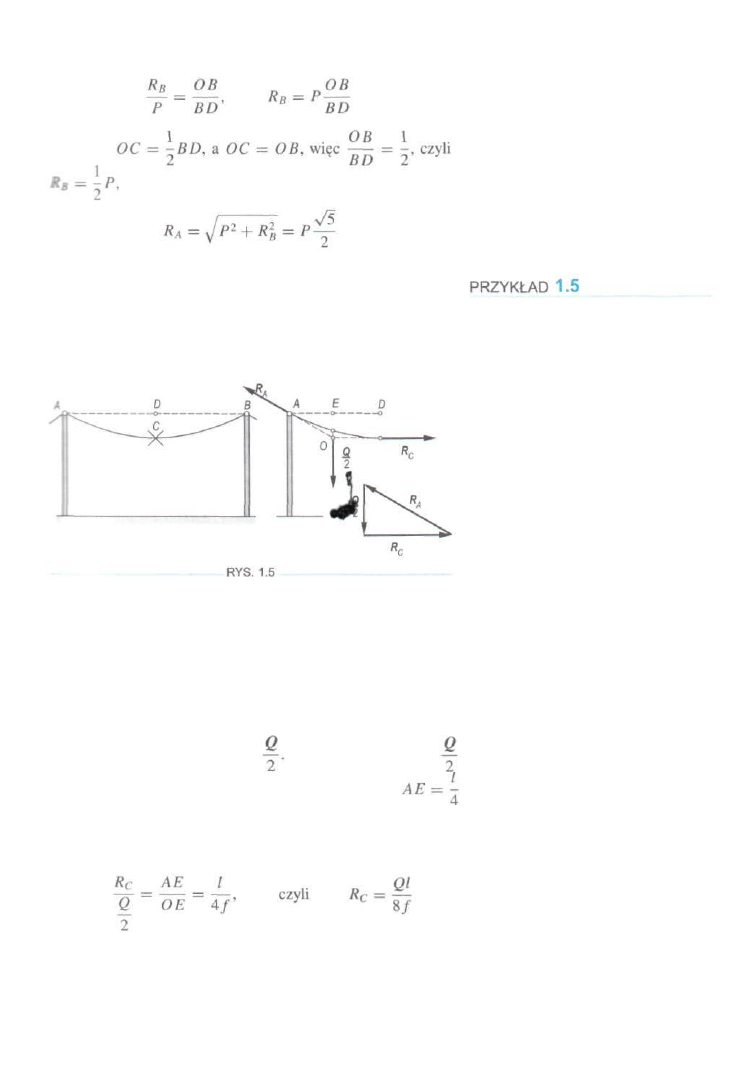
Przewód elektryczny o ciężarze Q jest umocowany na jednym
poziomie do dwóch słupów, pozostających w odległości
AB =1.
Strzałka zwisu przewodu CD — f. Wyznaczyć siłę
rozciągającą przewód w punkcie C oraz reakcje R
A
i R
B
(rys. 1.5).
ROZWIĄZANIE
Przetnijmy myślowo przewód w punkcie C i odrzućmy jego
prawą część. Oddziaływanie tej części na część lewą za
stępujemy silą Re, której kierunek jest poziomy. Na lewą
część przewodu działa jeszcze dodatkowo silą RĄ O niezna
nym kierunku i siła pionowa Przyjmujemy, że siła
działa wzdłuż linii odległej od punktu A o odcinek
(rys. 1.5). Linie działania wszystkich trzech sił powinny przeciąć
się w punkcie O. Zamknięty trójkąt sił jest podobny do
trójkąta AOE. Stąd możemy napisać związek
1. Układy płaskie w przypadku więzów idealnych
Jeżeli strzałka zwisu / jest bardzo mała, to siła Rc osiąga
bardzo duże wartości. Wartość reakcji
Ze względu na symetrię całego układu RA = RB
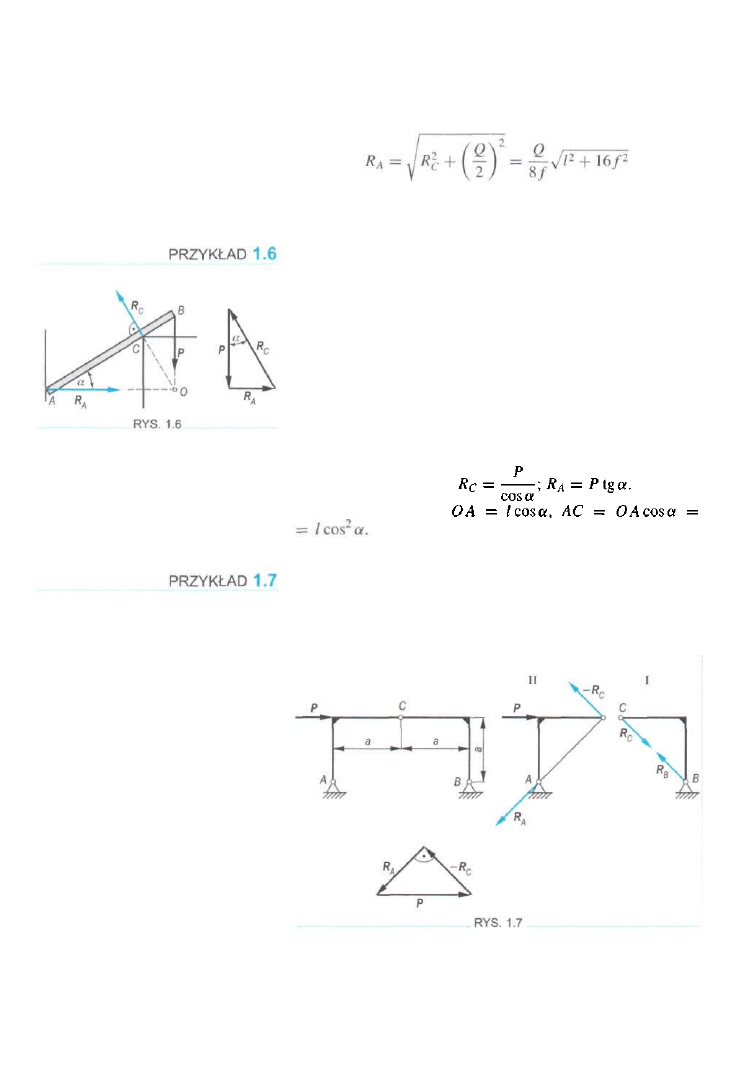
Nieważka belka AB o długości / opiera się jednym koń
cem A o gładką pionową ścianę, drugim o występ C. Ko
niec belki obciążono pionową siłą P. Nachylenie belki w sto
sunku do poziomu równe jest a. Wyznaczyć długość odcinka
AC
oraz wartości reakcji RA i Rc w położeniu równowagi
(rys. 1.6).
ROZWIĄZANIE
Kierunki reakcji RA i Rc w tym przypadku są znane. Przy
zadanym kącie a odległość AC musi być więc tak dobrana,
aby linie działania wszystkich sił przecięły się w punkcie O.
Z trójkąta sił dostajemy
Z rysunku mamy
Wyznaczyć reakcje przegubów A i B ramy, pokazanej na
rys. 1.7, obciążonej poziomą siłą P. Ciężar ramy zaniedbu
jemy. Rama składa się z dwóch symetrycznych części złączo
nych płaskim przegubem C.
ROZWIĄZANIE
W zadaniu tym mamy wyznaczyć cztery niewiadome: war
tości reakcji przegubów A i B oraz ich kierunki. Zadanie
to różni się w sposób zasadniczy od dotychczas rozwiązy
wanych, gdyż mamy do czynienia już nie z jednym ciałem
sztywnym, lecz z układem dwóch ciał połączonych w tym
przypadku płaskim przegubem C. W tego rodzaju zagadnie
niach należy układ rozbić na dwa układy proste. Weźmy pod
uwagę układ I. Jest on w równowadze i działają na niego
dwie siły: jedna przyłożona w punkcie B i druga w punk
cie C. Dwie siły są w równowadze wtedy i tylko wtedy, gdy
tworzą dwójkę zerową. Zatem R
B
i Rc muszą działać wzdłuż
prostej, wyznaczonej przez punkty B i C. Układ I oddziałuje
na układ II siłą — Rc. Przechodząc do układu II, możemy
już wyznaczyć kierunek reakcji RA i z trójkąta sił obliczyć
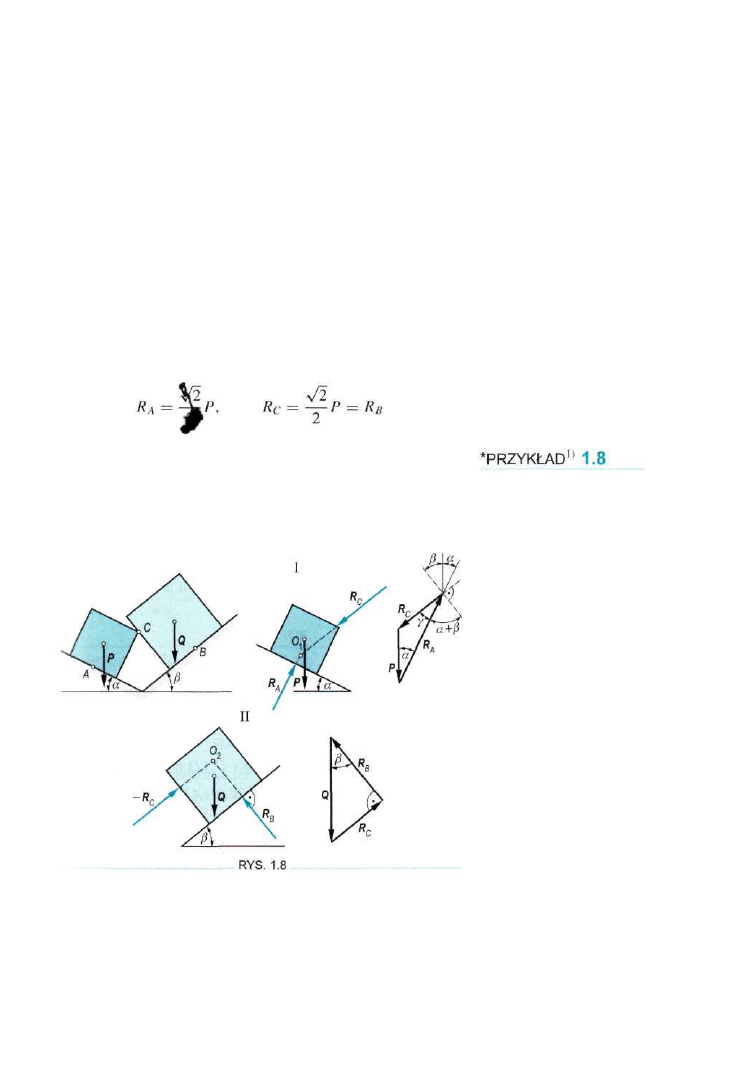
Dwa sześciany o ciężarach P i Q spoczywają na gładkich
równiach nachylonych w stosunku do poziomu pod kątami
a i /3 (rys. 1.8). Znaleźć zależność między siłami P i Q
w położeniu równowagi, naciski sześcianów na równie oraz
siłę oddziaływania jednego sześcianu na drugi.
'Przykłady oznaczone gwiazdką studenci studiów zawodowych
mogą pominąć.
1. Układy płaskie w przypadku więzów idealnych
ROZWIĄZANIE
W tym przypadku mamy również do czynienia z układem
złożonym. Na układ I działają trzy siły i jego równowaga bę
dzie możliwa, jeżeli ich linie działania przetną się w punkcie
0\.
Podobnie dla układu II linie działania R
B
, Q, Rc
muszą
się przeciąć w punkcie O
2
.
Zbudujemy dwa zamknięte trój
kąty sił. Po zastosowaniu twierdzenia sinusów z pierwszego
trójkąta dostaniemy
Z drugiego trójkąta otrzymujemy R
c
= Q
sin . Jeżeli
porównamy stronami otrzymane związki, otrzymamy zależ-
ność między siłami P i Q
Podobnie możemy obliczyć
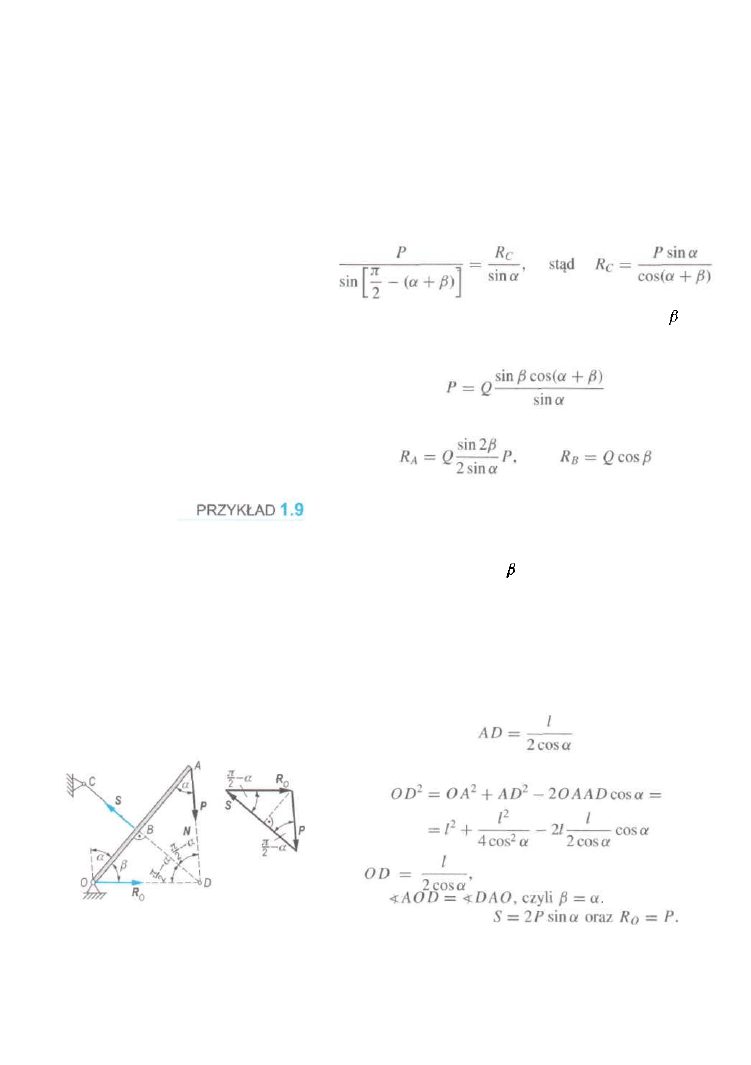
Belka O A jest umocowana przegubem O i przywiązana za
pomocą linki BC do ściany. Belkę obciążono w punkcie A
ciężarem P. Zaniedbując ciężar belki, wyznaczyć wartość re
akcji przegubu O oraz kąt , który tworzy ona z osią belki.
Wyznaczyć również silę w lince BC, jeżeli jest ona prostopa
dła do osi belki; przyjąć OB = AB.
ROZWIĄZANIE
Kierunek reakcji Ro powinien przechodzić przez punkt D
(rys. 1.9). Oznaczając długość belki przez / możemy napisać
związek
Ze wzoru Carnota dla trójkąta O AD mamy
czyli
a zatem trójkąt ODA jest równora
mienny i
Z trójkąta sił mamy:
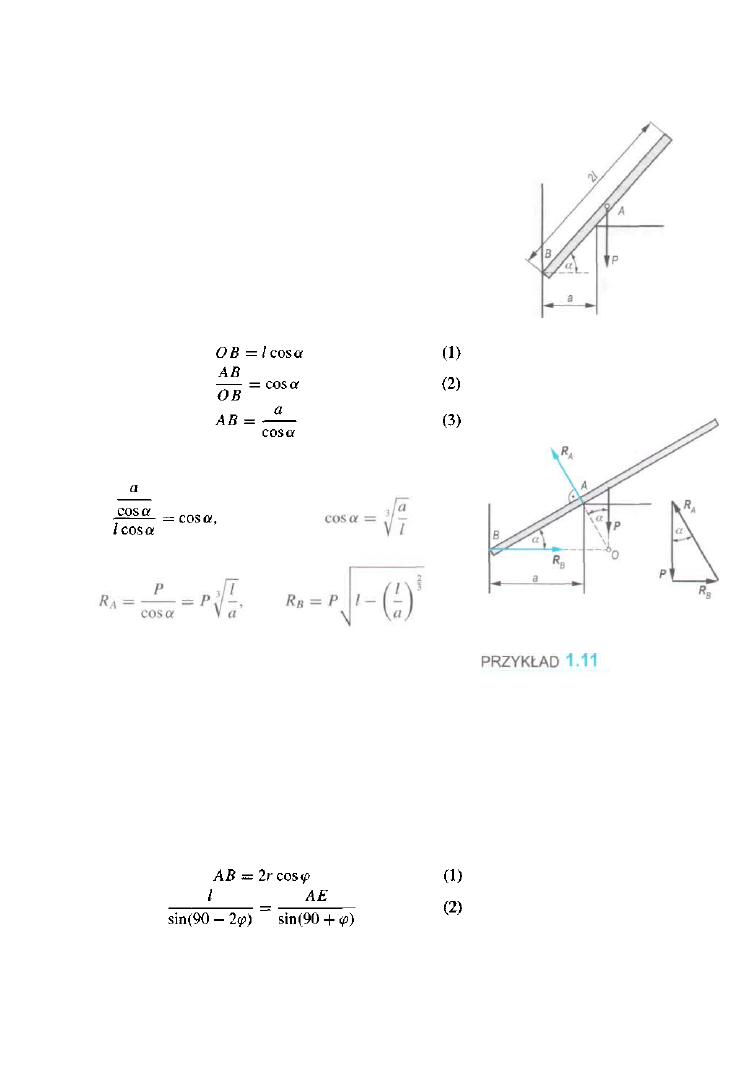
Jednorodny pręt o długości 2/ i ciężarze P opiera się końcen
B
o gładką pionową ścianę. W punkcie A opiera się o występ
znajdujący się w odległości a od ściany. Wyznaczyć reakcj(
w punktach A i B oraz wartość kąta a w położeniu równowag
irys. 1.10).
ROZWIĄZANIE
PRZYKŁAD 1.10
RYS. 1.10
RYS. 1.11
W tym przypadku znamy kierunki działania wszystkich trzech
sił RA, RB, P. Kierunki działania tych sił powinny przecinać
się w jednym punkcie, zatem położenie pręta jak na rys. 1.10
nie może być położeniem równowagi. Narysujmy pręt w po
łożeniu równowagi (rys. 1.11). Na podstawie tego rysunku
możemy napisać trzy związki
Po podstawieniu zależności (1) i (3) do związku (2) otrzy
mamy
Z trójkąta sił dostajemy
Jednorodny gładki pręt AD o długości 2/ i ciężarze P znaj
duje się w półsferycznej czaszy o promieniu r. Wyznaczyć
kąt ę oraz znaleźć reakcje R
A
i R
B
w położeniu równowagi
irys. 1.12).
ROZWIĄZANIE
W zadaniu tym, podobnie jak w poprzednim, znamy kierunki
działania sił R
A
, R
B
, P.
Kierunki te powinny przeciąć się
w jednym punkcie. Na rysunku 1.12 oznaczono ten punkt
przez E. Na podstawie rysunku możemy napisać następujące
zależności geometryczne
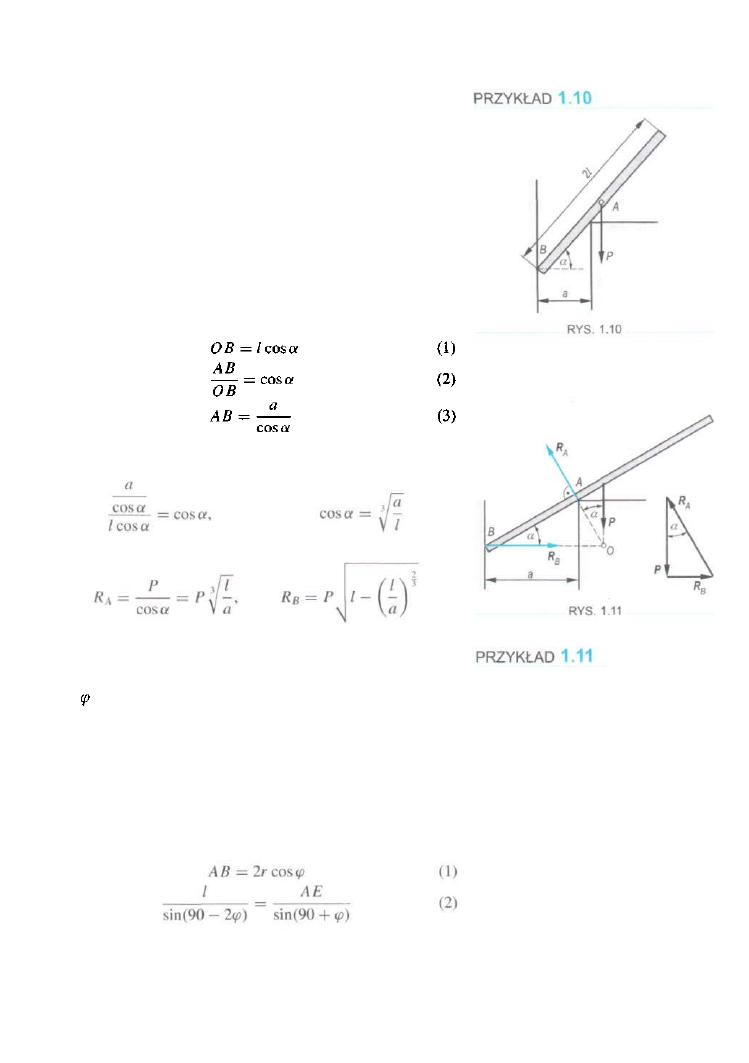
Jednorodny pręt o długości 2/ i ciężarze P opiera się końcem
B
o gładką pionową ścianę. W punkcie A opiera się o występ,
znajdujący się w odległości a od ściany. Wyznaczyć reakcje
w punktach A i B oraz wartość kąta a w położeniu równowagi
irys. 1.10).
ROZWIĄZANIE
W tym przypadku znamy kierunki działania wszystkich trzech
sił RĄ, R
B
, P.
Kierunki działania tych sił powinny przecinać
się w jednym punkcie, zatem położenie pręta jak na rys. 1.10
nie może być położeniem równowagi. Narysujmy pręt w po
łożeniu równowagi (rys. 1.11). Na podstawie tego rysunku
możemy napisać trzy związki
Po podstawieniu zależności (1) i (3) do związku (2) otrzy
mamy
stąd
Z trójkąta sił dostajemy
Jednorodny gładki pręt AD o długości 2/ i ciężarze P znaj
duje się w półsferycznej czaszy o promieniu r. Wyznaczyć
kąt oraz znaleźć reakcje RA i RB w położeniu równowagi
( rys. 1.12).
ROZWIĄZANIE
W zadaniu tym, podobnie jak w poprzednim, znamy kierunki
działania sił R
A
, R
B
, P.
Kierunki te powinny przeciąć się
w jednym punkcie. Na rysunku 1.12 oznaczono ten punkt
przez E. Na podstawie rysunku możemy napisać następujące
zależności geometryczne
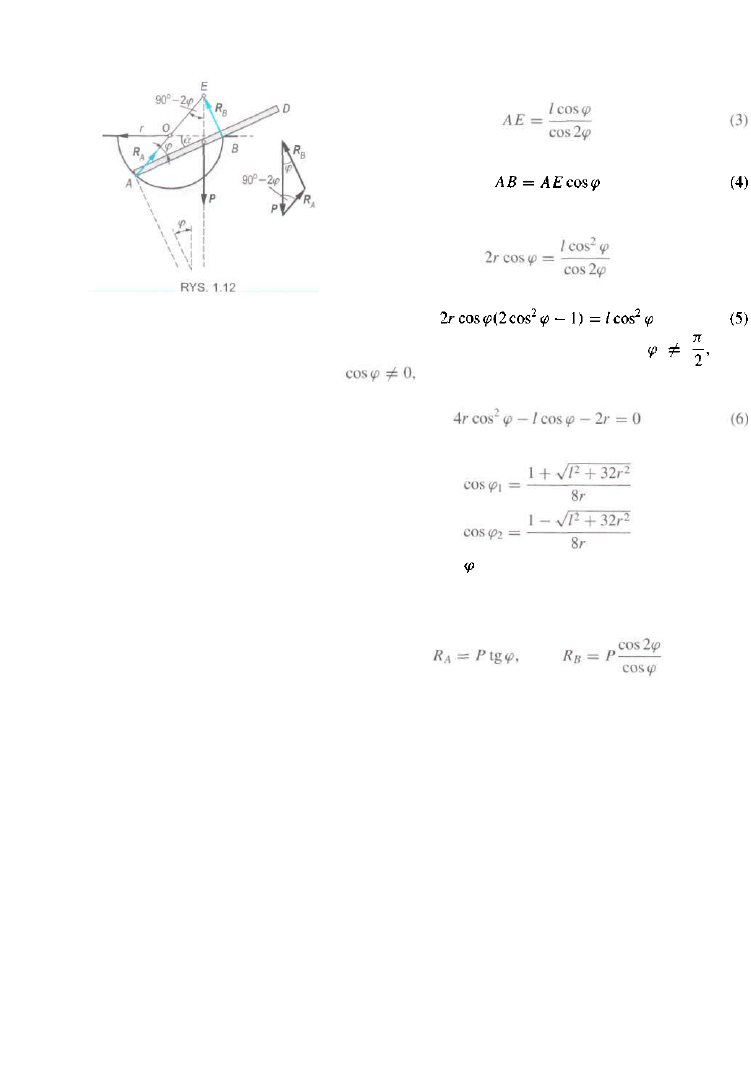
równość (2) wynika z twierdzenia sinusów, stąd mamy
Z rysunku widać, że
Po podstawieniu wzorów (3) i (1) do równania (4) otrzy
mamy
a po przekształceniu
Ponieważ ze względów fizycznych kąt
więc
a zatem możemy na podstawie zależności (5) na
pisać równanie
stąd
Ponieważ kąt jest kątem ostrym, drugi pierwiastek rów
nania (6) nie może być brany pod uwagę.
Korzystając z twierdzenia sinusów, z trójkąta sił wyzna
czamy poszukiwane reakcje
Na zakończenie podamy kilka uwag m e t o d y c z n y c h :
1. Jeżeli mamy do czynienia z układami prostymi, to
podanymi metodami możemy rozwiązywać zadania, w któ
rych znamy kierunki działania dwóch sił oraz wartość
jednej z nich. Na podstawie twierdzenia o trzech si
łach wyznaczamy kierunek działania trzeciej siły (rysu
nek zasadniczy). Wykreślamy na boku zamknięty trójkąt
sił, w którym znamy tylko jeden bok. Na rysunku zasad
niczym wyszukujemy trójkąt podobny, którego boki (lub
wzajemne stosunki boków) dadzą się wyznaczyć. Korzy
stając z podobieństwa tych dwóch trójkątów, wyznaczamy
1.2. Płaski układ sił zbieżnych
25
poszukiwane wartości sił. Tak postępowano w
przykładach 1.1 -- 1.5. Czasami wyszukanie na rysunku
zasadniczym trójkąta podobnego jest kłopotliwe (lub
trudno wyznaczyć wzajemne stosunki jego boków),
wtedy możemy wyznaczyć kąty między poszczególnymi siłami,
a następnie stosując twierdzenie sinusów, obliczyć wartości sił
(przykład 1.9).
2. Jeżeli mamy do czynienia z układem złożonym, należy
go rozbić na układy proste (w miejscu, gdzie ciała sztywne
łączone za pomocą więzów), a następnie rozrysować te
układy i z każdym z nich postąpić tak, jak to podano w p. 1.
Wygodniej jest zacząć od układu łatwiejszego (porównaj przykład
1.7 i 1.8).
3. Jeżeli mamy do czynienia z określeniem położenia równowagi
to wówczas kierunki działania wszystkich trzech sił
a znane. Należy więc w pierwszej kolejności ustawić ciało,
którego równowagę rozpatrujemy, w takim położeniu, by
równowaga mogła zachodzić, tzn. kierunki działania sił przecięły
jednym punkcie (wykonać rysunek zasadniczy), a następnie
postępować tak, jak to podano w p. 1. Ten sposób
zilustrowano w przykładach 1.6, 1.10 i 1.11.
Dla
1.2
Płaski układ sił zbieżnych
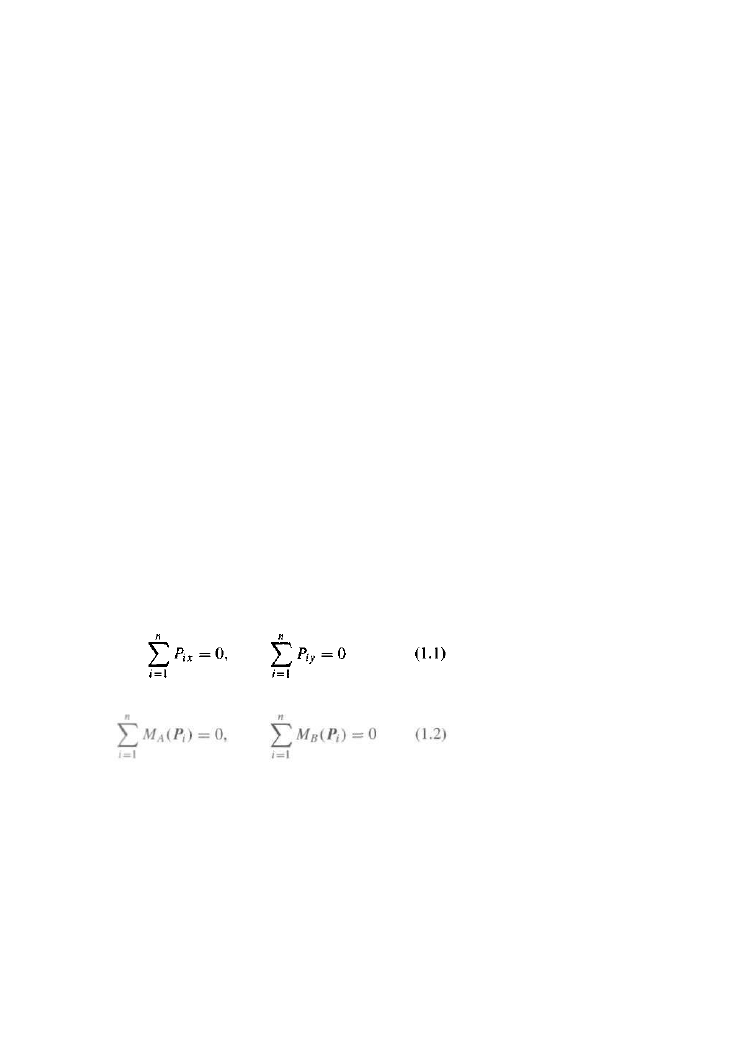
dowolnej liczby sił zbieżnych na płaszczyźnie mamy dwa
niezalezne równania równowagi
Lub
Punkty A i B są wybrane dowolnie, lecz nie mogą leżeć
na jednej prostej z punktem 0, w którym przecinają się linie
działania wszystkich sił. Do równań tych wchodzą znane siły
czynne oraz nieznane reakcje. Aby zadanie mogło być statycz-
nie wyznaczalne, liczba niewiadomych nie może przekraczać
dwóch.
Gdy siła P i punkt A leżą na płaszczyźnie, wówczas mo
tt charakteryzujemy wielkością liczbową M
A
(P)
= ±Ph,
gdzie h jest ramieniem siły (odległością punktu A od linii
działania siły P). Znak „+" przyjmujemy, gdy siła wywo
łuje obrót w kierunku przeciwnym do ruchu wskazówek ze
gara.
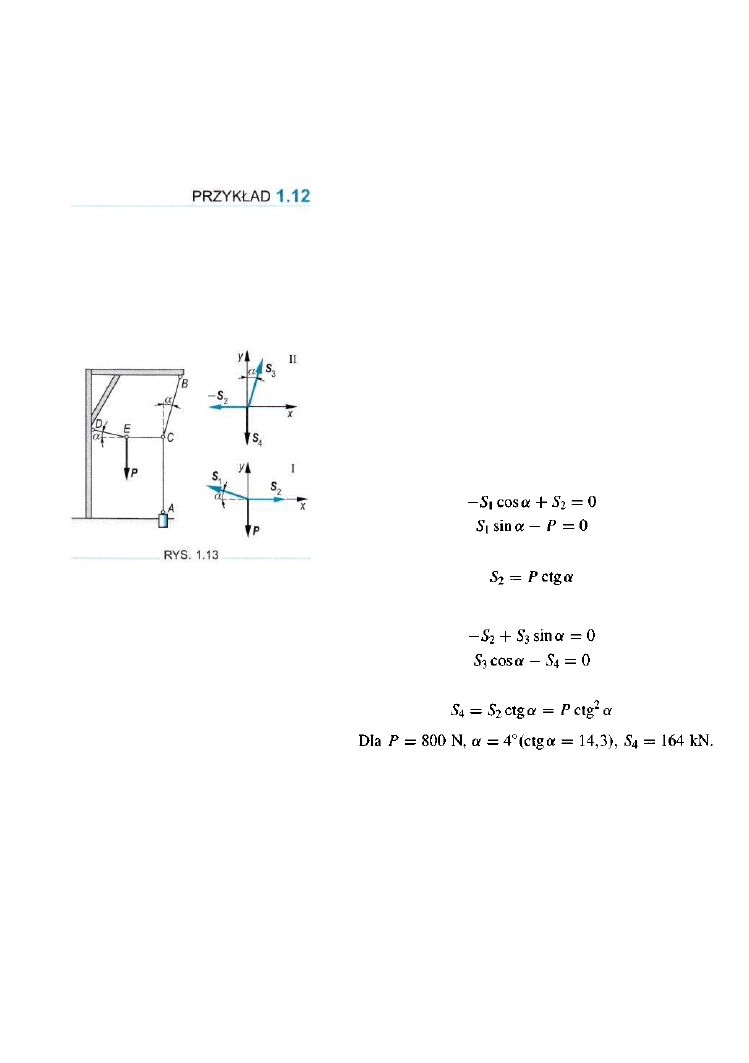
Aby wyciągnąć z ziemi pal, robotnik przywiązał do niego linę
w punkcie A. Po zamocowaniu drugiego końca liny B przy
wiązał do niej drugą linę w punkcie C, zaczepioną w punkcie
D,
po czym uchwycił rękami linę CD w punkcie E i zawisł
w powietrzu; część AC liny zajęła wtedy położenie pionowe,
a część CE — poziome.
Części CB i DE utworzyły jednakowe kąty a, jedna
z pionem, druga z poziomem (rys. 1.13). Wyznaczyć siłę w li
nie AC, jeżeli ciężar robotnika jest równy P.
ROZWIĄZANIE
Przecinając linki dostaniemy jeden układ sił zbieżnych
w punkcie E, drugi w punkcie C. Korzystając z warunków
równowagi (1.1), dostaniemy dla układu I następujące równa
nia
stąd
Podobnie dla układu II otrzymamy
stąd
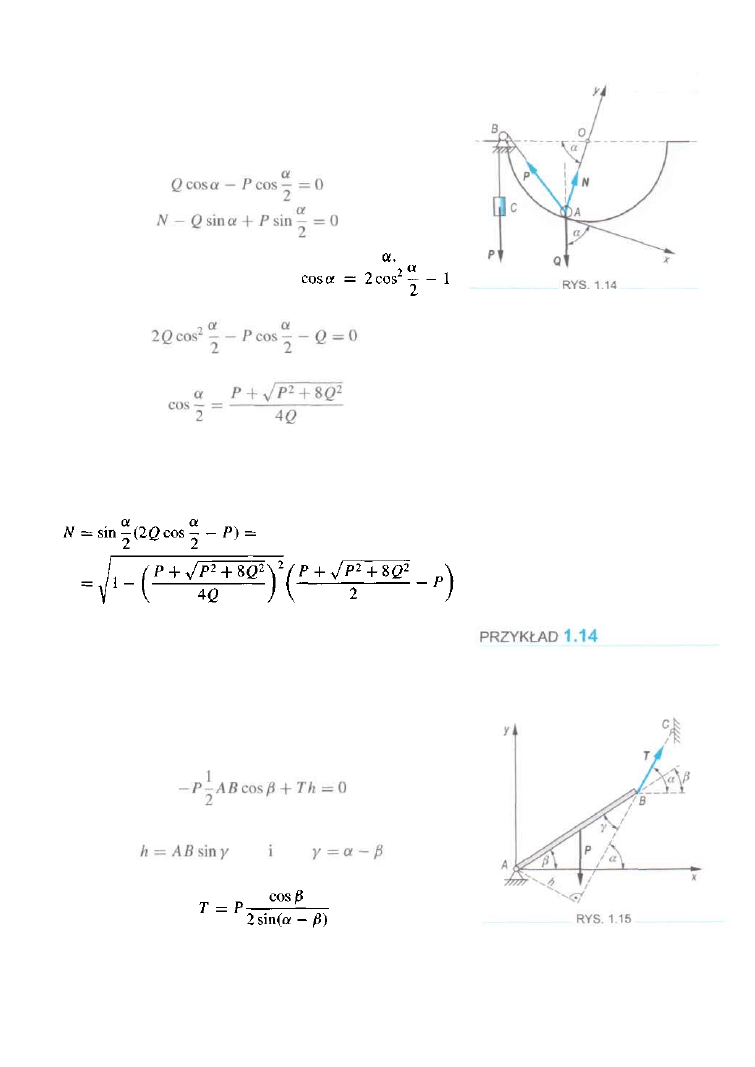
Na pionowej półkuli jest umieszczona kulka A, która może się
poruszać tylko po okręgu. Kulka jest utrzymywana w równo
wadze za pomocą nici ABC. Na końcu nici uwieszono ciężar
P.
Ciężar kulki równy jest Q. Znaleźć kąt a, jaki tworzy
odcinek O A z odcinkiem OB w położeniu równowagi, oraz
nacisk kulki na powierzchnię półkuli. Średnicę bloku B za
niedbać.
więc
Z rysunku mamy
Jednorodny pręt AB o ciężarze P końcem A jest zamocowany
na przegubie płaskim, koniec B zaś jest zawieszony na lince
BC
(rys. 1.15). Znając kąty a i 8 znaleźć siłę T w lince BC.
ROZWIĄZANIE
Warunek równowagi pręta w postaci (1.2) względem punktu
.4 ma postać
Ponieważ kąt a jest kątem mniejszym niż n, przyjęliśmy
tylko dodatni pierwiastek równania kwadratowego.
Z drugiego równania równowagi można wyznaczyć na
cisk na półkulę
stąd
Z pierwszego równania można obliczyć kąt Po za
ROZWIĄZANIE
Przyjmujemy osi układu: x — styczna do półokręgu w punk
cie A,y — normalna (rys. 1.14). Warunki równowagi kulki
A przyjmą postać
mienieniu cos a zgodnie ze wzorem
dostaiemy równanie
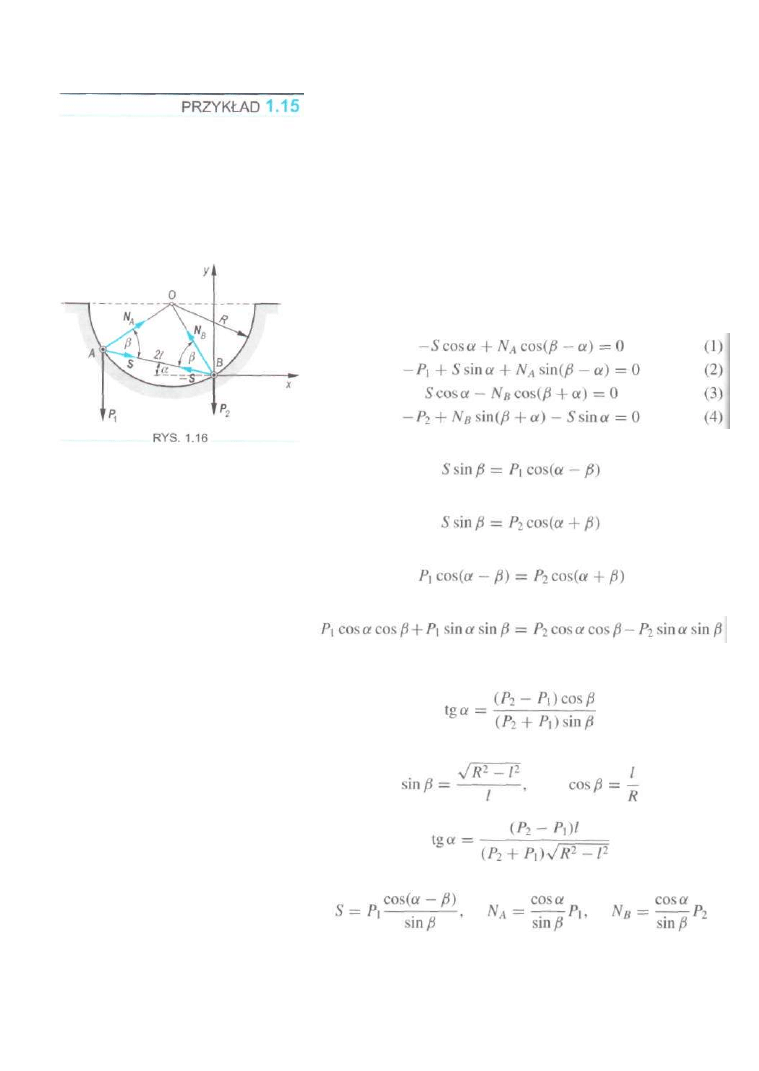
Dwie kulki Ai B o ciężarach P\ i P
2
znajdują się w położeniu
równowagi wewnątrz gładkiej, sferycznej czaszy o promieniu
R.
Kulki są połączone nieważkim prętem o długości AB = 21.
Znaleźć naciski NA i NB kulek na czaszę, siłę S w pręcie
AB
oraz kąt a, jaki tworzy pręt AB z poziomem w położeniu
równowagi (rys. 1.16).
ROZWIĄZANIE
Przecinając myślowo pręt AB, rozdzielamy układ na dwa
układy proste. Siły działające na punkty A i B zaznaczono na
rys. 1.16. Korzystając z warunków równowagi dla punktów A
i fi w postaci (1.1), dostajemy następujące cztery równania
Z równań (1) i (2) otrzymamy
a z równań (3) i (4)
Stad mamy związek
Po rozpisaniu otrzymamy
Po podzieleniu ostatniej równości przez cos a cos /3 i zgrupo
waniu odpowiednich wyrażeń dostajemy
Na podstawie rys. 1.16 możemy napisać
zatem
Z równań
(1)--(4)
mamy
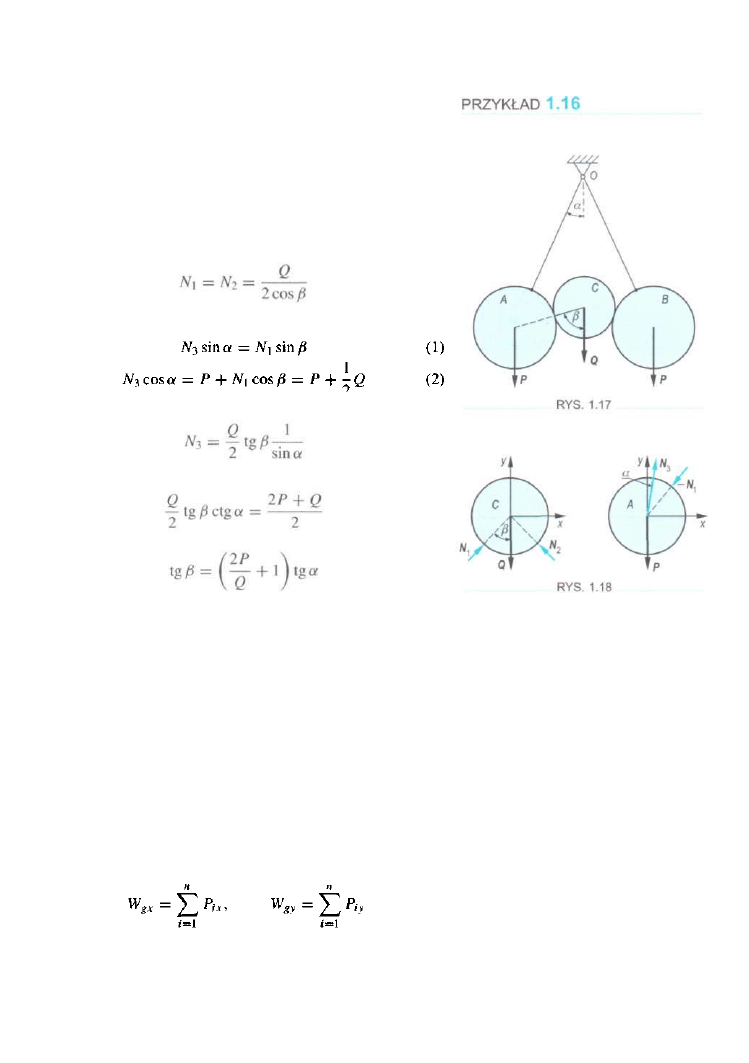
Dwa jednorodne walce A i B, każdy o ciężarze P zawieszono
w punkcie O na nieważkich niciach. Między walcami A i B
położono walec C o ciężarze Q. Znaleźć zależność między
kątami a i 6 w położeniu równowagi (rys. 1.17).
ROZWIĄZANIE
Na walce A i C działają siły przedstawione na rys. 1.18.
Z warunków równowagi walca C mamy
a z warunków równowagi walca A otrzymujemy dwa równania
Wyliczamy
Z drugiego równania dostajemy więc
Zatem
1.3
Redukcja dowolnego płaskiego układu sił
Zredukować dany układ n sił działających na dane ciało
sztywne do wybranego bieguna O oznacza zastąpić układ n
sił układem możliwie najprostszym, przyłożonym w punkcie
O,
równoważnym danemu układowi n sił. Układ równoważny
rozumiemy jako układ wywołujący ten sam skutek.
Z mechaniki wiadomo, że dowolny płaski układ sił re
dukuje się do wektora głównego W
g
oraz momentu głów
nego M
g
.
Współrzędne wektora głównego obliczamy ze wzorów
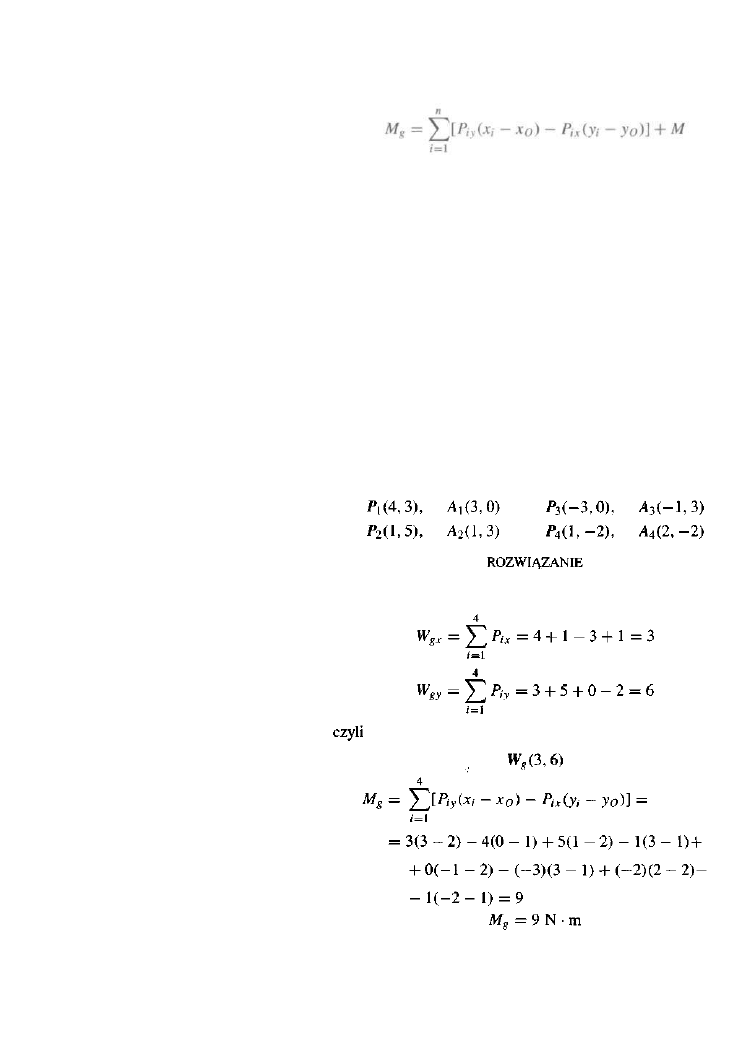
Na podstawie podanych wzorów mamy
PRZYKŁAD 1.17 Zadany układ czterech sił P, zaczepionych w punktach A,
zredukować do bieguna 0(2, 1). Współrzędne sił podano w N,
a współrzędne punktów przyłożenia w m
a moment główny z zależności
gdzie: Pj
x
, Pi
y
— współrzędne i-tej siły układu redukowa
nego, Xi, yi — współrzędne przyłożenia tej siły, xo,yo —
współrzędne wybranego bieguna redukcji O, M — moment
skupiony działający na dane ciało.
Jak widzimy z tych wzorów, wektor główny nie zależy
od wyboru bieguna redukcji O, będziemy go nazywać nie
zmiennikiem redukcji.
Moment główny jest funkcją (liniową)
xo, yo,
czyli ze zmianą bieguna jego wartość się zmienia.
Punkt zaczepienia momentu skupionego M jest nieistotny, bo
moment jako wynik działania pary sił jest wektorem swobod
nym; parę sił możemy dowolnie przemieszczać po płaszczyź
nie.
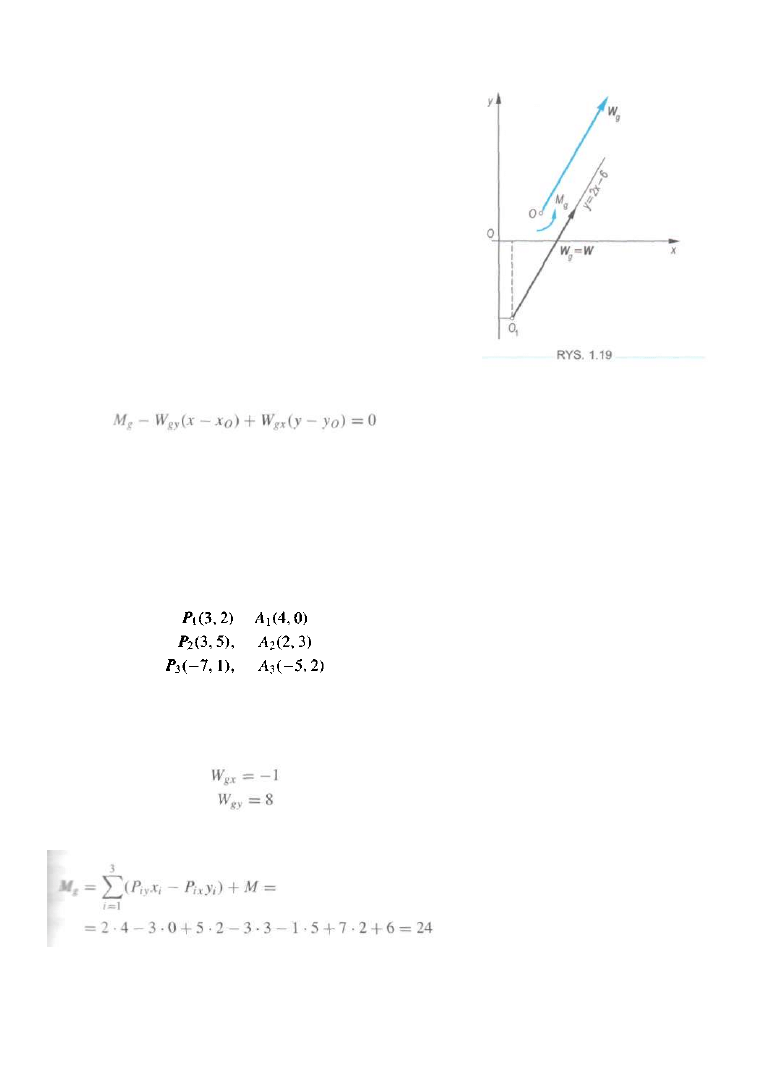
W celu lepszego zrozumienia rozwiązania przedstawiono
je na rys. 1.19. Układ czterech sił został tu zastąpiony wekto-
rem głównym o współrzędnych 3 i 6 oraz momentem głów-
nym o wartości 9. Okazuje się, że gdy wektor główny i mo-
ment główny są różne od zera, wówczas można układ zreduko-
wać do wypadkowej. Wiadomo, że wypadkowa jest to jedna
siła równoważna danemu układowi sił. Wypadkowa W bę-
dzie równa wektorowi głównemu, lecz jej punkt zaczepienia
musi leżeć na odpowiedniej prostej. Wyznaczymy równanie
tej prostej. Zredukujemy jeszcze raz cały układ sił do bie-
guna O
1
o współrzędnych (x, y). Oczywiście możemy do tego
bieguna zredukować równoważny układ W
g
, M
g
.
Otrzymamy
W
g1
= W
g
oraz M
g1
= M
g
- W
gy
{x - x
0
) + W
gx
(y - y
0
).
Jeżeli współrzędne (x, y) dobierzemy tak, że M
g1
=
0, to
wektor główny będzie wypadkową. Stąd otrzymamy równanie
prostej, wzdłuż której działa wypadkowa
Dla naszego przykładu mamy 9 — 6(x - 2) + 3(y - 1) = 0 .
Wypadkowa układu sił leży na prostej y = 2x — 6.
Zredukować dany układ do początku układu współrzędnych,
a nastepnie do wypadkowej; moment M — 6 jest przyłożony
w punkcie A
4
(2.2).
PRZYKŁAD 1.18
ROZWIĄZANIE
współrzędne wektora głównego wynoszą
a moment główny jest równy
Równanie linii działania wypadkowej wyznaczamy na
podstawie równania
lub w postaci kierunkowej y = -8x + 24.
Na podstawie wykonanej redukcji możemy wyznaczyć
warunki równowagi dowolnego płaskiego układu sił. Układ
taki pozostanie w równowadze, jeżeli zarówno wektor główny,
jak i moment główny będą równe zeru. Stąd dostajemy trzy
niezależne warunki równowagi
Podane równania równowagi możemy zapisać w innej równo
ważnej postaci
z zastrzeżeniem, że punkty A, B, C nie leżą na jednej prostej,
lub w postaci
gdzie ostatni warunek oznacza sumę rzutów sił na dowolną
prostą /, która nie jest prostopadła do prostej wyznaczonej
przez punkty A i B.
Dla układu sił równoległych jako przypadku szczegól
nego możemy obrać układ współrzędnych tak, aby siły były
równoległe do osi y. Wówczas otrzymamy dwa niezależne
warunki równowagi w postaci
PRZYKŁAD 1.20
RYS. 1.21
i na podstawie
kąta wewnętrznego trójkąta mam;
poprzedniego związku
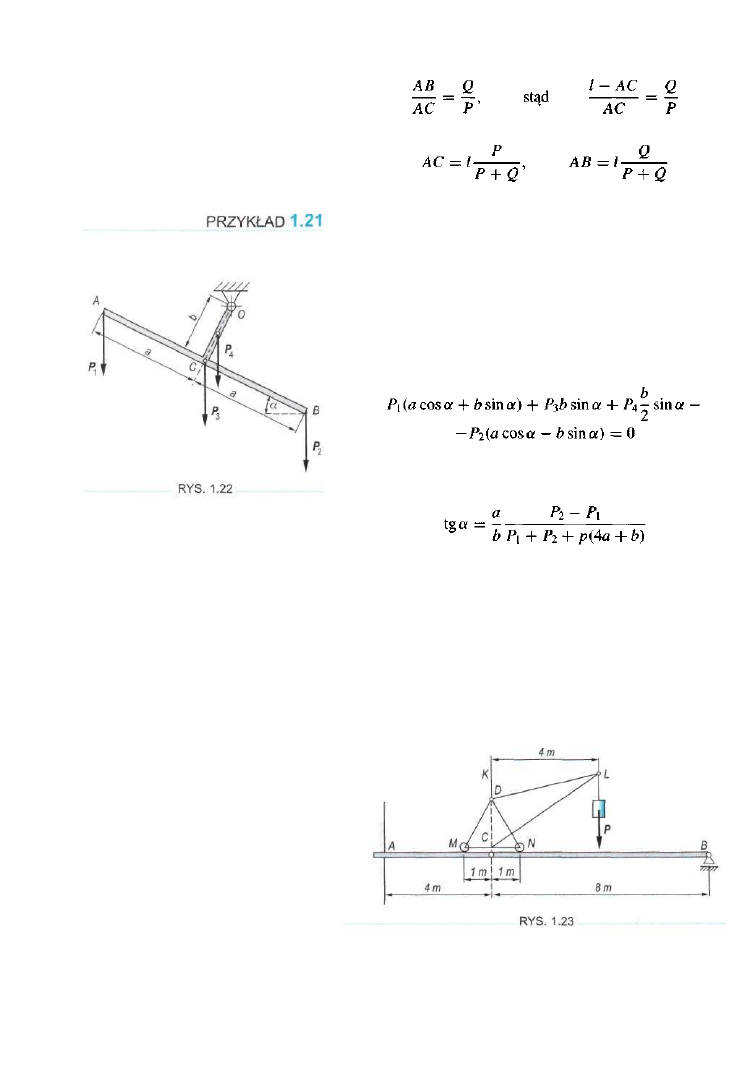
Blok A jest w równowadze pod działaniem reakcji R
A
oraz sił w lince działających wzdłuż AC i AB. Ponieważ sił)
w
lince są te same, więc prosta AK (linia działania R
A
)
jest
dwusieczną kąta CAB. Na podstawie własności dwusiecznj
Ponieważ
Na układ działają trzy siły P, Q oraz reakcja R
A
.
Zatem
reakcja R
A
jest pionowa i równa P+Q. Z warunku momentów
względem A dostajemy
Dwie kulki o ciężarach P i Q złączono nieważkim prętem
3C.
W punktach B i C przymocowano sznur BAC o długości
równej /, który przerzucono przez blok A. Znaleźć AB i AC
w
położeniu równowagi (rys. 1.21).
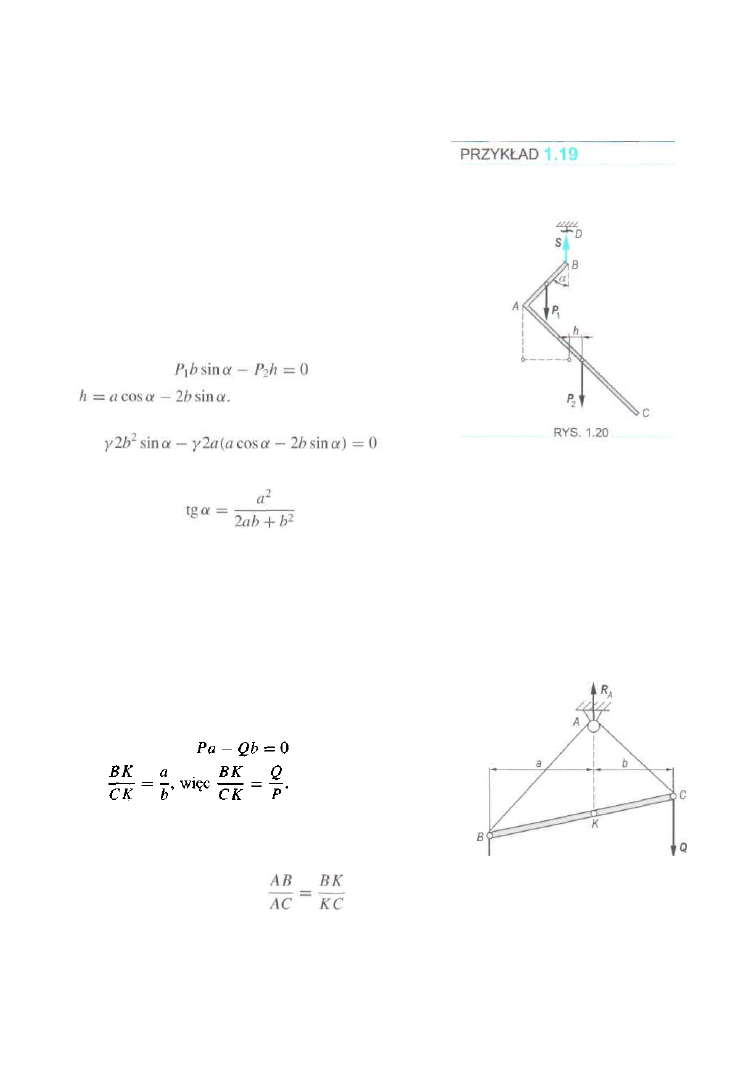
Po podzieleniu stronami przez 2y cos a otrzymamy
gdzie h — a
cos a — 2b sin a.
to wstawieniu do równania dostajemy
Na pręt działają siły P1, P2 i napięcie nici S, przy czym Pi =
= y2b, P
2
— y2a,
gdzie y — ciężar przypadający na jed
nostkę długości pręta.
Z warunku równowagi momentów względem punktu B
d
ostajemy
Jednorodny pręt zgięty w punkcie A pod kątem prostym jest
zawieszony na nici BD. Dane: AB — 2b, AC = 2a, a > b
rys. 1.20).
Znaleźć kąt a w położeniu równowagi.
1.4
Równowaga układu sił równoległych
ROZWIĄZANIE
Pozioma belka przegubowa ACB ma koniec A zamocowań;
w ścianie, a koniec B oparty na przesuwnej podporze; w punk-
cie C znajduje się przegub. Belka jest obciążona dźwigiem
podnoszącym ciężar P = 1 kN. Przy wysunięciu ramienia
dźwigu na odległość KL = 4 m, środek ciężkości dźwigi
leży na pionowej CD. Ciężar dźwigu wynosi Q = 5 kN
Pomijając ciężar belki, wyznaczyć reakcje jej podpór. Rami
dźwigu leży w jednej płaszczyźnie z belką (rys. 1.23).
Po podstawieniu P3, = 4pa, PĄ = 2pb i podzieleniu stronami
przez cos a wyznaczamy
Dwa pręty AB i OC, których ciężar jednostki długości wynosi
2p są połączone prostopadle w punkcie C. W punktach A
i B zawieszono ciężarki P1 i P2 (P2 > P1). Wyznaczyć kąt
a
w położeniu równowagi (rys. 1.22).
ROZWIĄZANIE
Z warunku momentów względem punktu O otrzymamy rówj
nanie
zatem
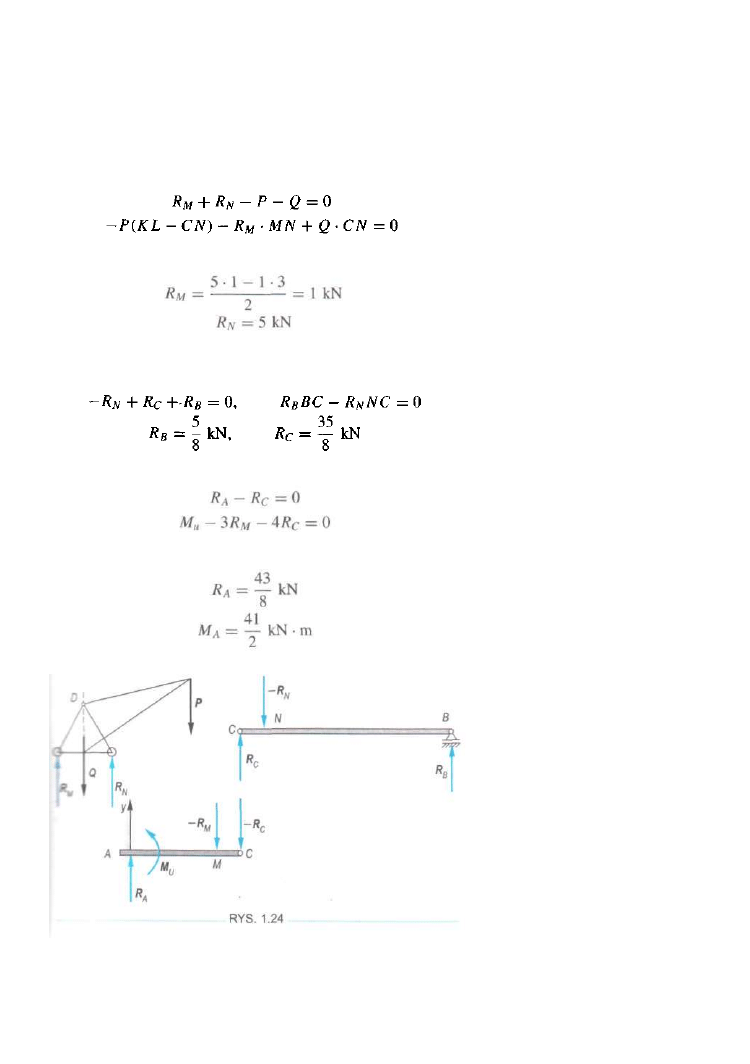
ROZWIĄZANIE
W tym przypadku rozbijamy układ złożony na trzy układy
proste (rys. 1.24). W pierwszej kolejności rozpatrzymy rów
nowagę dźwigu. Dostajemy dwa równania równowagi w po
staci
Stąd mamy
Belka BC będzie w równowadze, jeżeli reakcja Rc bę
dzie pionowa. Stąd dostajemy
Warunki równowagi belki AC mają postać
Siad
stąd
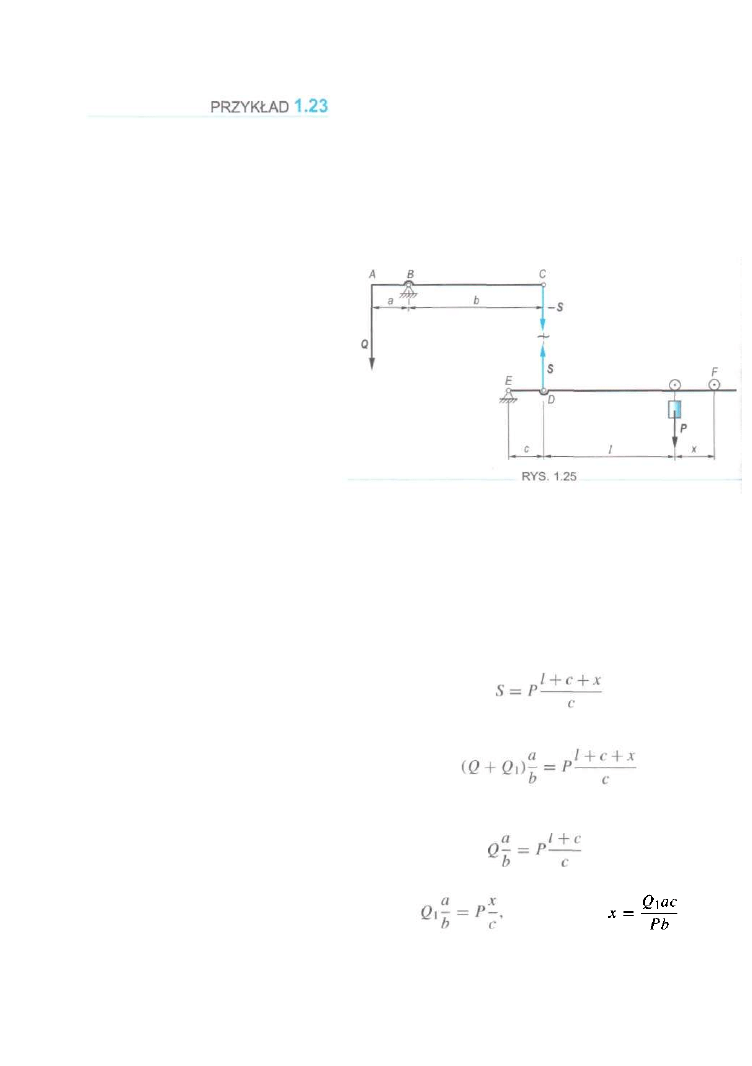
W celu zmierzenia dużych sił Q zbudowano układ dwóch
różnoramiennych dźwigni ABC i EDF, połączonych ze sobą
łącznikiem CD. W punktach B i E znajdują się nieruchome
podpory. Po dźwigni EDF może przesuwać się ciężar P. Siła
Q
przyłożona w punkcie A jest równoważona przez ten ciężar,
umieszczony w odległości / od punktu D. O jaką odległość x
należy przesunąć ciężar P, jeżeli do siły Q dodamy siłę Q1,
(rys. 1.25)?
ROZWIĄZANIE
Rozdzielmy myślowo pręt CD. Otrzymamy w ten sposób dwa
układy proste. Dla pierwszego układu z warunku równowag
w postaci sumy momentów względem punktu B uzyskujemy
a
siłę w pręcie CD równą S = (Q + Q\)-. Podobnie z wa-
b
runku momentów względem punktu E dla układu drugiego
dostajemy
Z porównania tych związków otrzymamy
Z warunków zadania wynika, że siła Q była zrównov
żona siłą P przyłożoną w odległości / od punktu D. Wted
dostajemy zależność . Po uwzględnieniu ostat-
niego związku możemy napisać
Wyszukiwarka
Podobne podstrony:
J Nizioł Metodyka rozw zadań z mechaniki
Niziol Metodyka rozwiazywania zadan z mechaniki
Niziol Metodyka rozwiazywania zadan z mechaniki
logika rozw zadan v2
Metodyka rozwiązywania zadań, Transport Politechnika, Semestr 1, Fizyka
81 zadań z mechaniki 2
8 METODY PRZYBLIŻONE ZADAŃ OPTYMALIZACJI DYSKRETNEJ
METODY REALIZACJI ZADAŃ RUCHOWYCH
5 Metody badań własności mechanicznych materiałów inżynierskich Twardość Udarność
Lista zadań Mechanika Ogólna
I Lista zadan Mechanika Plynow
Metody rozwiazywania zadań tekstowych
cpp egzamin 9022008 rozw zadan , Temat J
Metody rozwiązywania zadań tekstowych, matematyka w kształceniu zintegrowanym
11 Metody rozwiązywania zadań optymalizacji
Metody rozwiązywania zadań tekstowych, edukacja matematyczna z metodyką
Fizyka lista zadań 1, Mechanika i Budowa Maszyn PWR MiBM, Semestr I, Fizyka
więcej podobnych podstron