4. Przekształcenia schematów blokowych
42
4. PRZEKSZTAŁCENIA SCHEMATÓW BLOKOWYCH
Każdy z wyżej wymienionych modeli matematycznych można przedstawić jako blok,
czyli „czarną skrzynkę” z jednym wejściem i jednym wyjściem. W przypadku złożonych
systemów zestawy tych bloków tworzą skomplikowane struktury, dlatego do ich
uproszczenia stosuje się odpowiednie przekształcenia.
W praktyce stosuje się następujące połączenia bloków:
a) Połączenie szeregowe
∏
=
=
n
i
i
s
G
s
G
1
)
(
)
(
b) Połączenie równoległe
∑
=
=
n
i
i
s
G
s
G
1
)
(
)
(
c) Połączenie ze sprzężeniem zwrotnym
)
(
)
(
1
)
(
)
(
0
0
s
H
s
G
s
G
s
G
±
=
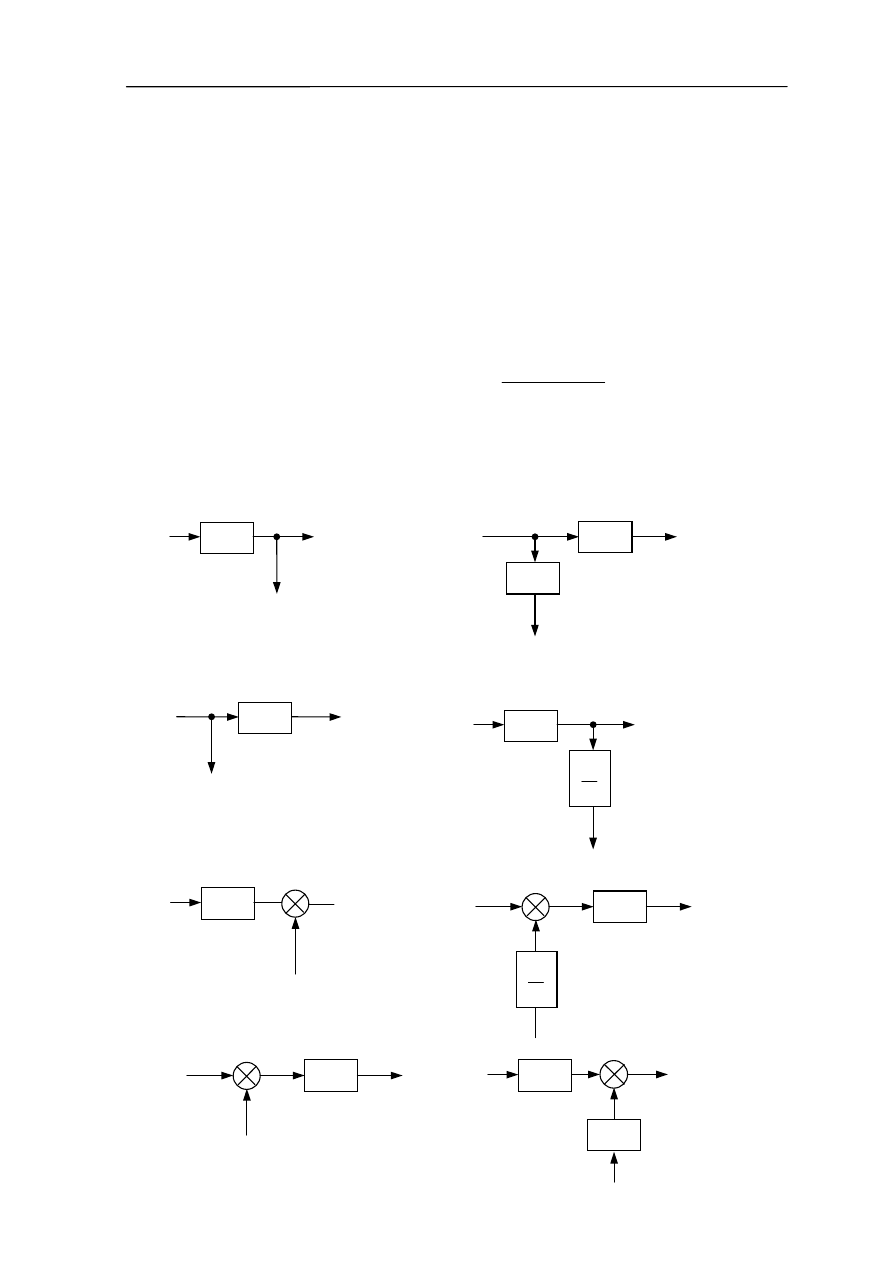
Na rysunku 4.1. przedstawiono podstawowe przekształcenia:
a) przesunięcie węzłów zaczepowych przed blok
b) przesunięcie węzłów zaczepowych za blok
c) przesunięcie węzłów sumujących przed blok
d) przesunięcie węzłów sumujących za blok
G
x
y
y
G
x
y
y
G
G
x
y
x
G
x
y
x
G
1
G
x
1
y
x
2
-
G
y
x
2
x
1
-
G
y
G
1
x
2
x
1
-
G
x
1
y
x
2
G
-
4. Przekształcenia schematów blokowych
43
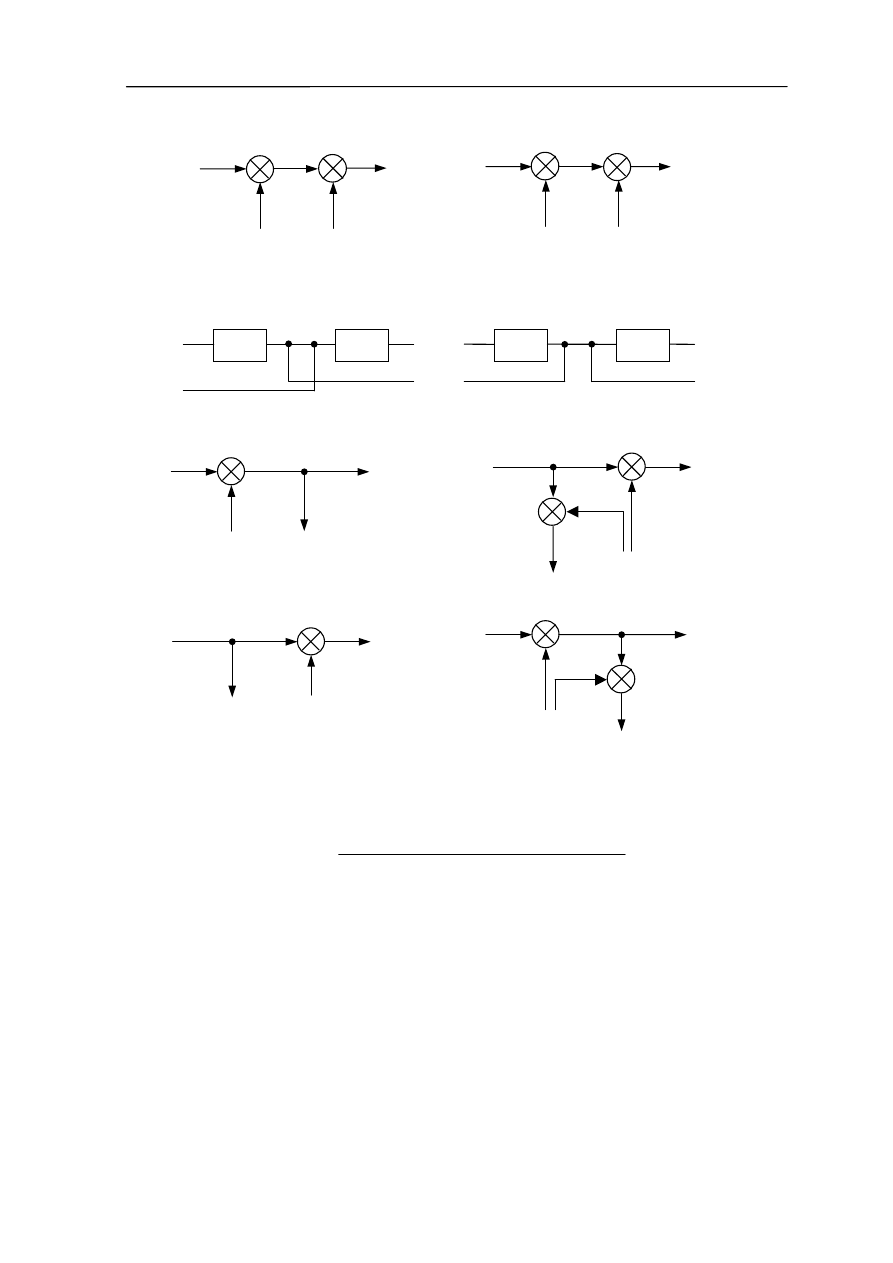
e) zmiana położenia węzłów sumujących
f) zmiana położenia węzłów zaczepowych
g) przesunięcie węzła zaczepowego przed węzeł sumujący
h) przesunięcie węzła sumującego przed węzeł zaczepowy
Rys. 4.1
W układzie gdzie łatwo wyznaczyć tor główny można stosować mnemotechniczną
metodę oczkową. Jeżeli mamy n torów sprzężeń zwrotnych to
( )
∑
+
=
n
oczek
h
zamknietyc
cji
Transmitan
otwartego
toru
cja
Transmitan
s
G
1
1
Oczka należy brać takie aby był ten sam kierunek przepływu sygnałów.
Ustalenie znaku w mianowniku: obchodząc oczko będziemy mieli parzystą ilość węzłów
sumacyjnych (odwzorowujących znak) z ujemnym sprzężeniem zwrotnym to iloczyn
transmitancji dla danego oczka ma znak „ - ”, a przy nieparzystej ilości węzłów ma znak
„+”.
y=x
1
-x
2
+x
3
y
x
2
x
1
-
x
3
+
x
1
-x
2
y=x
1
+x
3
-x
2
y
x
2
x
1
-
x
3
+
x
1
+x
3
G
1
x
1
y
1
G
2
y
1
y
1
y
2
G
1
x
1
y
1
G
2
y
1
y
1
y
2
y
x
2
x
1
-
y
y
x
2
x
1
-
y
-
y
x
2
x
1
-
x
1
y
+
x
2
x
1
-
x
1
4. Przekształcenia schematów blokowych
44
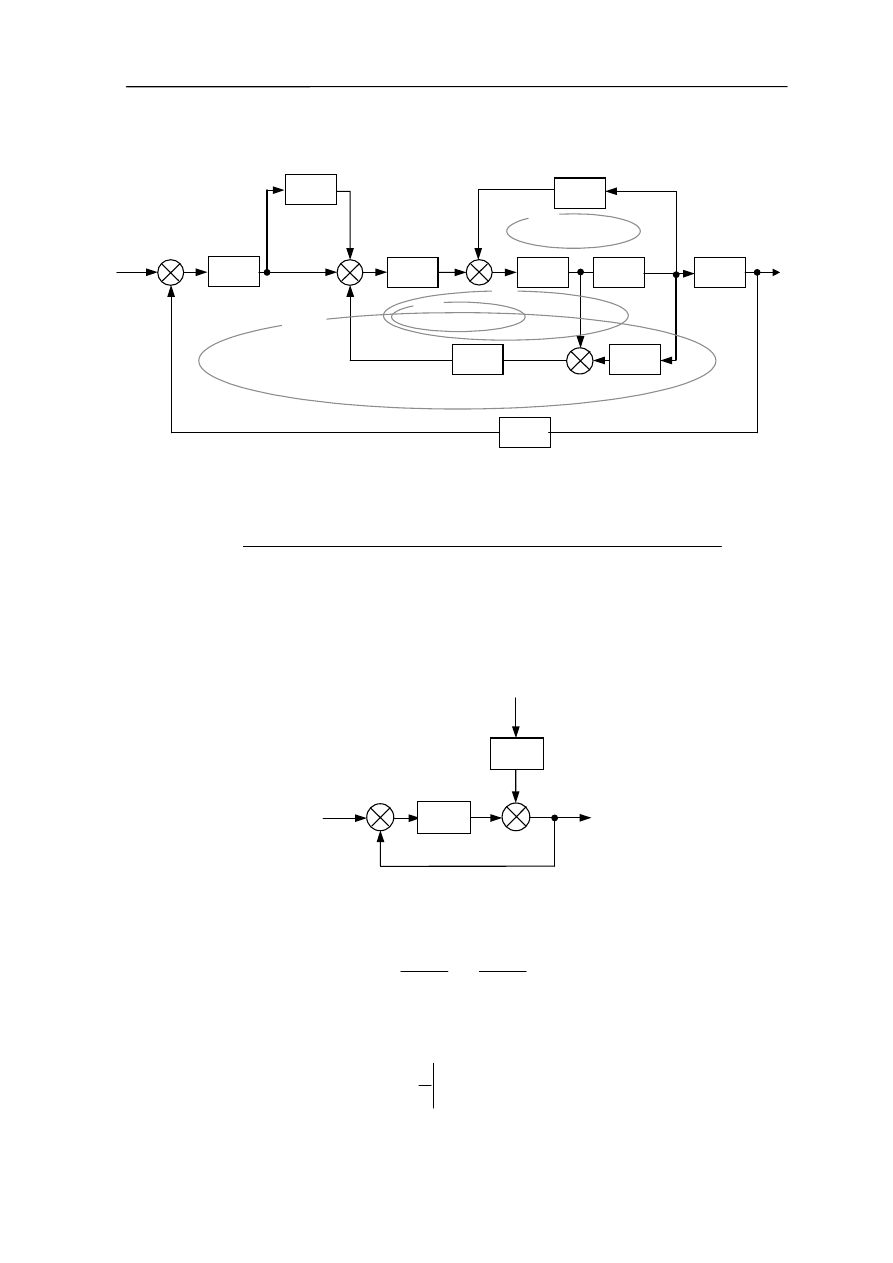
Przykład 4.1
Wyznaczyć transmitancję wypadkową układu z rysunku 4.2.
Rys. 4.2
( )
(
)
(
)
!
!
!
!
"
!
!
!
!
#
$
!
! "
!
! #
$
!
"
!#
$
!
"
!#
$
4
0
6
5
4
3
2
1
3
3
2
5
4
3
2
2
4
3
1
1
5
4
6
5
4
3
2
1
1
1
1
oczko
oczko
oczko
oczko
H
G
G
G
G
G
G
H
H
G
G
G
H
G
G
H
G
G
G
G
G
G
G
G
s
G
+
+
+
+
+
+
=
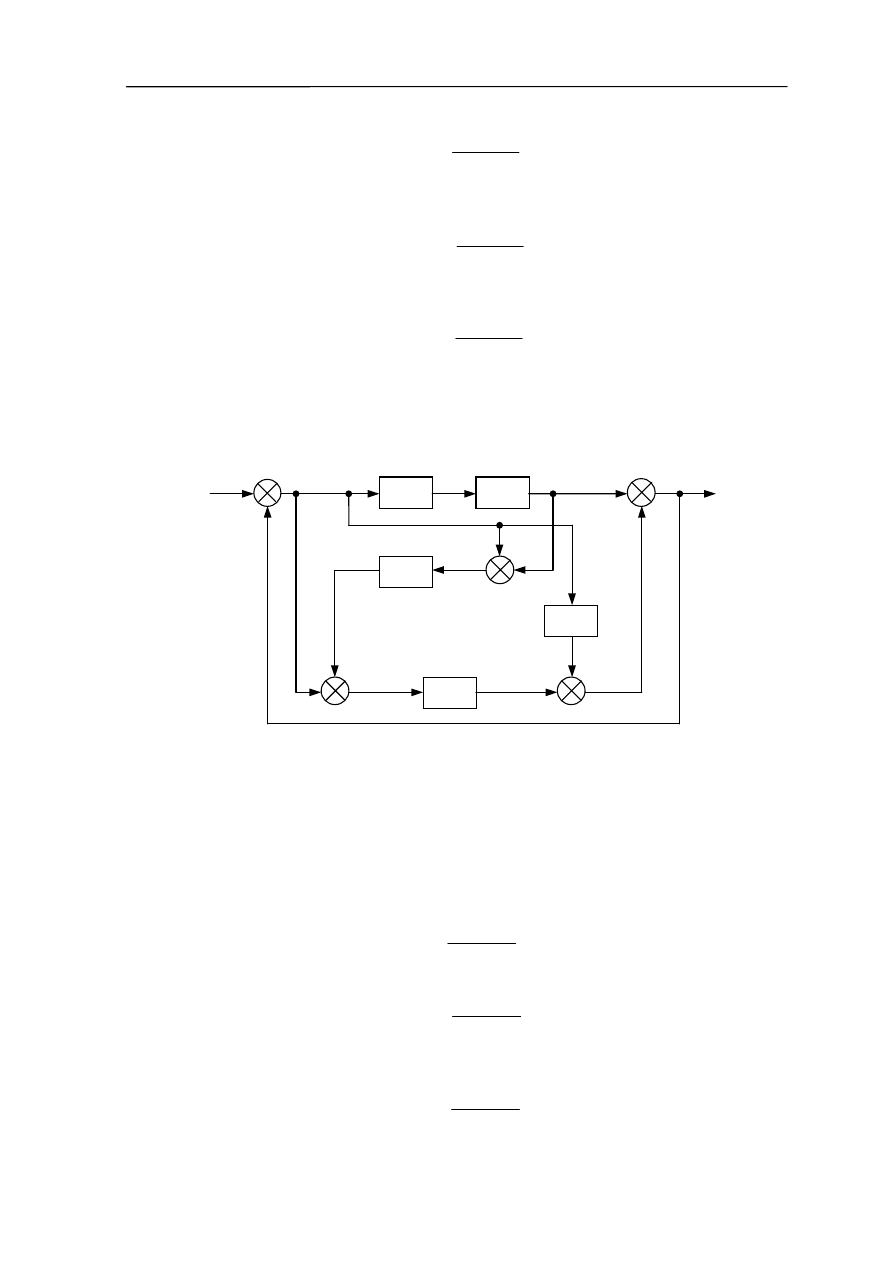
Przykład 4.2
Wyznaczyć transmitancję: układu otwartego, układu otwartego w funkcji wymuszenia
f=f(y), układu zamkniętego, układu zamkniętego w funkcji wymuszenia f=f(y) oraz układu
zamkniętego przyjmując uchyb regulacji za sygnał wyjściowy.
Rys. 4.3
f
G
G
x
G
G
y
o
z
o
o
+
+
+
=
1
1
Transmitancje:
a) układu otwartego
o
f
G
y
=
=
0
ε
G
1
(s)
G
3
(s)
G
4
(s)
G
5
(s)
G
6
(s)
X(s)
G
2
(s)
H
1
(s)
H
2
(s)
H
3
(s)
H
0
(s)
Y(s)
1
2
3
4
-
-
-
+
G
z
y
x
f
ε
G
o
-
+
4. Przekształcenia schematów blokowych
45
b) układu zamkniętego
o
o
f
G
G
x
y
+
=
=
1
0
c) uchybowa
o
f
G
x
+
=
=
1
1
0
ε
d) zakłóceniowa
o
z
x
G
G
f
y
+
=
=
1
0
e) układu otwartego dla zakłócenia f.
y
f
=G
z
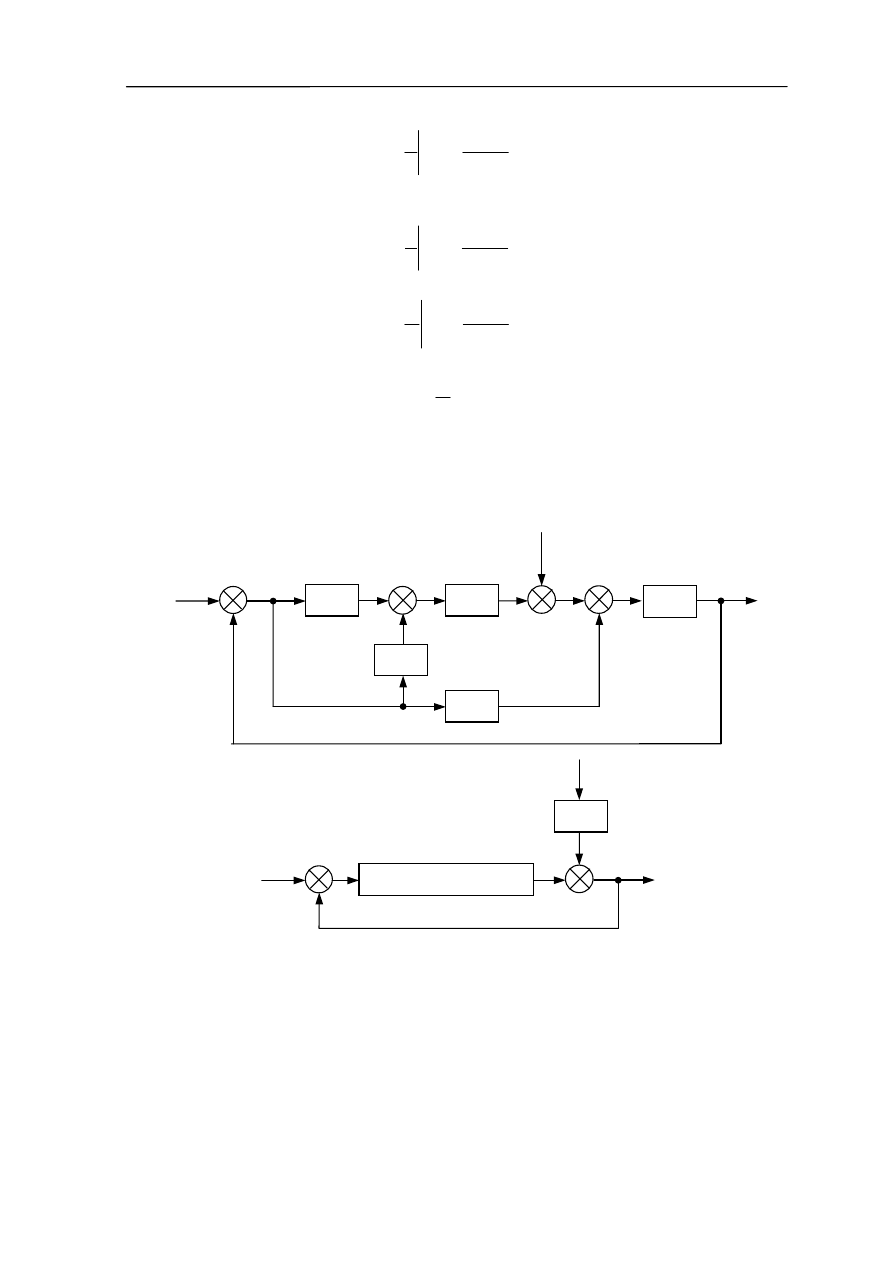
Przykład 4.3.
Wyznaczyć transmitancję układu otwartego, układu otwartego w funkcji wymuszenia
f=f(y), układu zamkniętego, układu zamkniętego w funkcji wymuszenia f=f(y) oraz układu
zamkniętego przyjmując uchyb regulacji za sygnał wyjściowy.
Rys. 4.4
Transmitancje mają postać:
a) układu otwartego
( ) (
)
[
]
5
3
4
2
1
G
G
G
G
G
s
G
O
+
+
=
b) układu otwartego w funkcji wymuszenia f=f(y)
( )
5
G
s
G
Of
=
G
1
G
5
G
3
G
4
G
2
y
x
ε
1
f
ε
2
ε
-
+
+
+
[(G
1
+G
2
)G
4
+G
3
]G
5
G
5
y
x
f
ε
-
+
4. Przekształcenia schematów blokowych
46
c) układu zamkniętego
( )
( )
( )
s
G
s
G
s
G
O
O
z
+
=
1
d) układu zamkniętego w funkcji wymuszenia f=f(y)
( )
( )
s
G
G
s
G
O
f
z
+
=
1
5
e) układu zamkniętego przyjmując uchyb regulacji za sygnał wyjściowy (transmitancja
uchybowa)
( )
( )
s
G
s
G
O
z
+
=
1
1
ε
Przykład 4.4
Wyznaczyć transmitancję: układu otwartego, układu otwartego w funkcji wymuszenia
f=f(y), układu zamkniętego, układu zamkniętego w funkcji wymuszenia f=f(y) oraz układu
zamkniętego przyjmując uchyb regulacji za sygnał wyjściowy.
Rys. 4.5
Transmitancje mają postać:
a) układu otwartego
( )
[
]
5
4
3
2
1
2
1
1
G
G
G
G
G
G
G
s
G
O
+
+
+
=
b) układu otwartego w funkcji wymuszenia f=f(y)
( )
4
3
G
G
s
G
Of
=
c) układu zamkniętego
( )
( )
( )
s
G
s
G
s
G
O
O
+
=
1
d) układu zamkniętego w funkcji wymuszenia f=f(y)
( )
( )
s
G
G
G
s
G
O
f
+
=
1
4
3
e) układu zamkniętego przyjmując uchyb regulacji za sygnał wyjściowy (transmitancja
uchybowa)
( )
( )
s
G
s
G
O
+
=
1
1
ε
G
1
G
5
G
3
G
4
G
2
y
x
ε
f
-
+
+
+
Wyszukiwarka
Podobne podstrony:
Przekształcenia schematów blokowych
przekształcanie schematów blokowych 1
Przekształcanie schematów blokowych
Przekształcanie schematów blokowych
5 Algorytmy i schematy blokowe
3 Projektowanie układów automatyki (schematy blokowe, charakterystyki)
10 schematy blokowe i grafy (jako zobrazowanie modeli matematycznych)
Schemat blokowy For 1
Schemat blokowy Do While 2
SCHEMAT BLOKOWY
SCHEMAT BLOKOWY RADARU
Algebra schematów blokowych c d
Schemat blokowy If 1
Schemat blokowy For 3
SCHEMATY BLOKOWE ODBIORNIKÓW
06-10, schematy-blokowe
Schemat blokowy While 3
więcej podobnych podstron