Rozdziaª 1
Schematy blokowe ukªadów automatyki
Autorzy:
1.1 Algebra schematów blokowych
1.1.1 Zasady przeksztaªcania schematów blokowych
W celu uproszczenia wypadkowej transmitancji operatorowej regulatora, obiektu regulacji
lub caªego ukªadu regulacji w przypadku, gdy skªada si¦ on z kilku elementów ró»nie
poª¡czonych, nale»y wyprowadzi¢ zale»no±ci na transmitancj¦ wypadkow¡. Ka»dy ukªad
regulacji, niezale»nie od tego czy jest bardziej lub niej zªo»ony, mo»na rozªo»y¢ na cz¦±ci
skªadaj¡ce si¦ z elementów poª¡czonych szeregowo, równolegle, w ukªadzie ze sprz¦»eniem
zwrotnym i równolegle z oddzielnymi wej±ciami lub wyj±ciami.
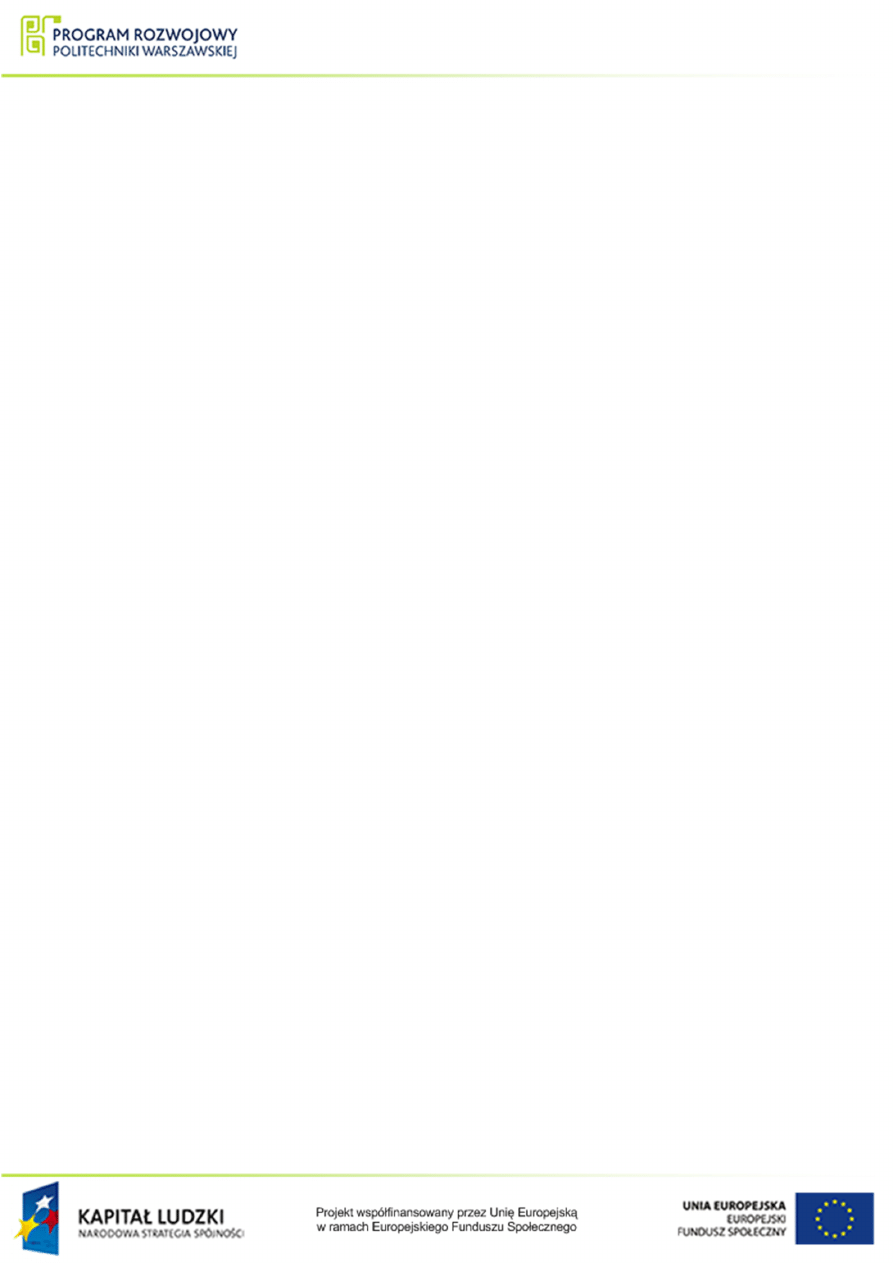
Zasady przeksztaªcania schematów blokowych w celu ich uproszczenia i okre±lenia trans-
mitancji ukªadu nazywane s¡ algebr¡ schematów blokowych. W tablicy
,
przedstawiono zestawienie zasadniczych przykªadów takich przeksztaªce«. Ich znajomo±¢
wystarcza do okre±lenia transmitancji dowolnie zªo»onego ukªadu.
Transmitancj¦ wypadkow¡ du»ej liczby elementów ró»nie poª¡czonych znajduje si¦, w
prostszych przypadkach, drog¡ rozªo»enia ukªadu na cz¦±ci proste. Jednak»e ta metoda
wymaga du»ej przejrzysto±ci schematu blokowego, co przy bardziej zªo»onych ukªadach
regulacji mo»e powodowa¢ pewne trudno±ci. Dlatego w takich przypadkach najlepiej jest
post¦powa¢ nast¦puj¡co:
1. Dla ka»dego punktu w¦zªowego , do którego dochodzi kilka sygnaªów zestawia
si¦, zgodnie z zasad¡ superpozycji, równanie i z otrzymanego w ten sposób ukªadu
równa« wyznacza si¦ szukan¡ transmitancj¦.
2. W ka»dym punkcie w¦zªowym wszystkie sygnaªy odchodz¡ce s¡ wzajemnie sobie
równe i jednocze±nie ka»dy z tych sygnaªów odchodz¡cych równa si¦ sumie wszyst-
kich sygnaªów przychodz¡cych.
1
Rysunek 1.1 Tablica podstawowych przeksztaªce« schematów blokowych, cze±¢ a.
2
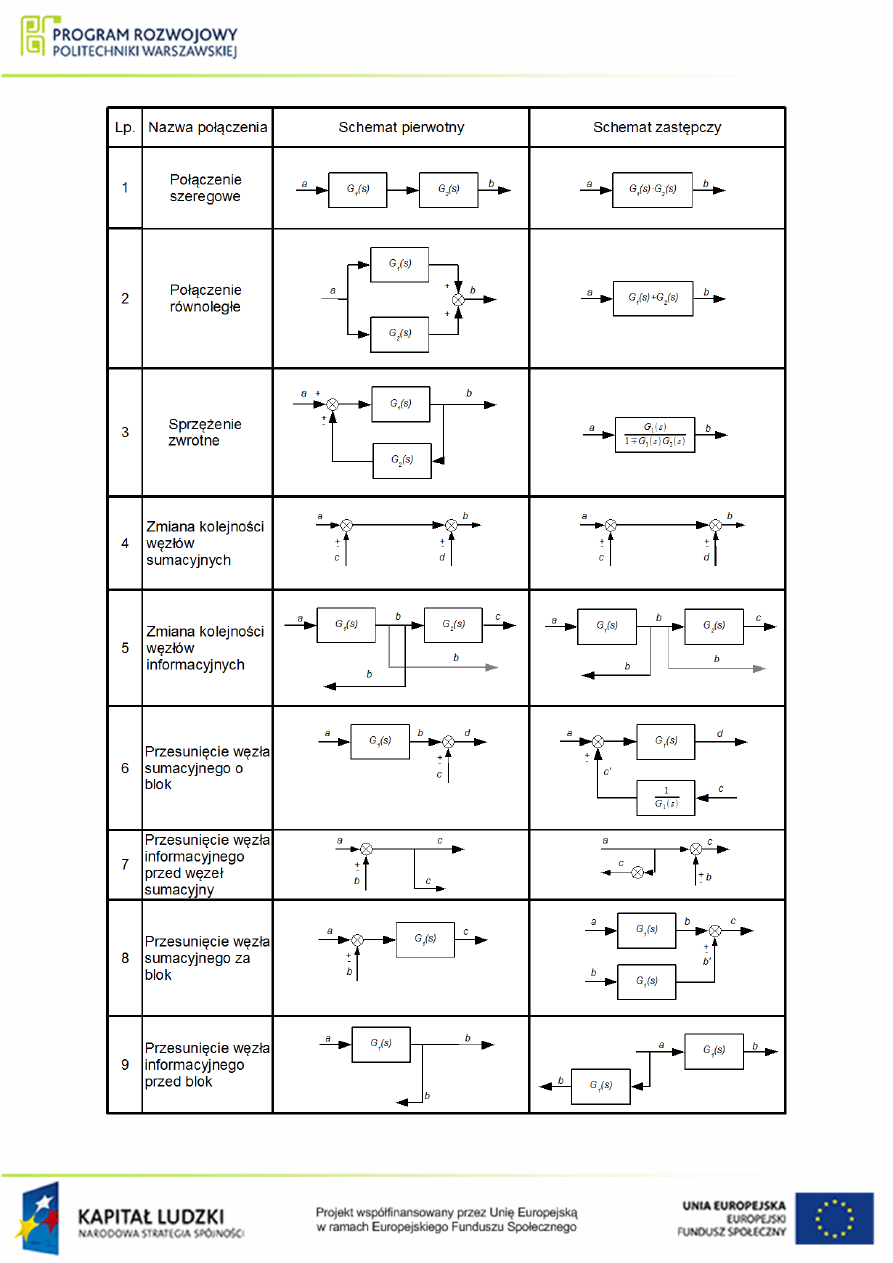
Rysunek 1.2 Tablica podstawowych przeksztaªce« schematów blokowych, cze±¢ b.
W przypadkach zªo»onych, gdy transmitancj¦ ukªadu wyra»a si¦ jako funkcj¦ transmi-
tancji jego elementów wprowadza si¦ uproszczone oznaczenie transmitancji, np. zamiast
G
x
(s)
piszemy po prostu G
x
.
1.1.2 Przykªady zada«
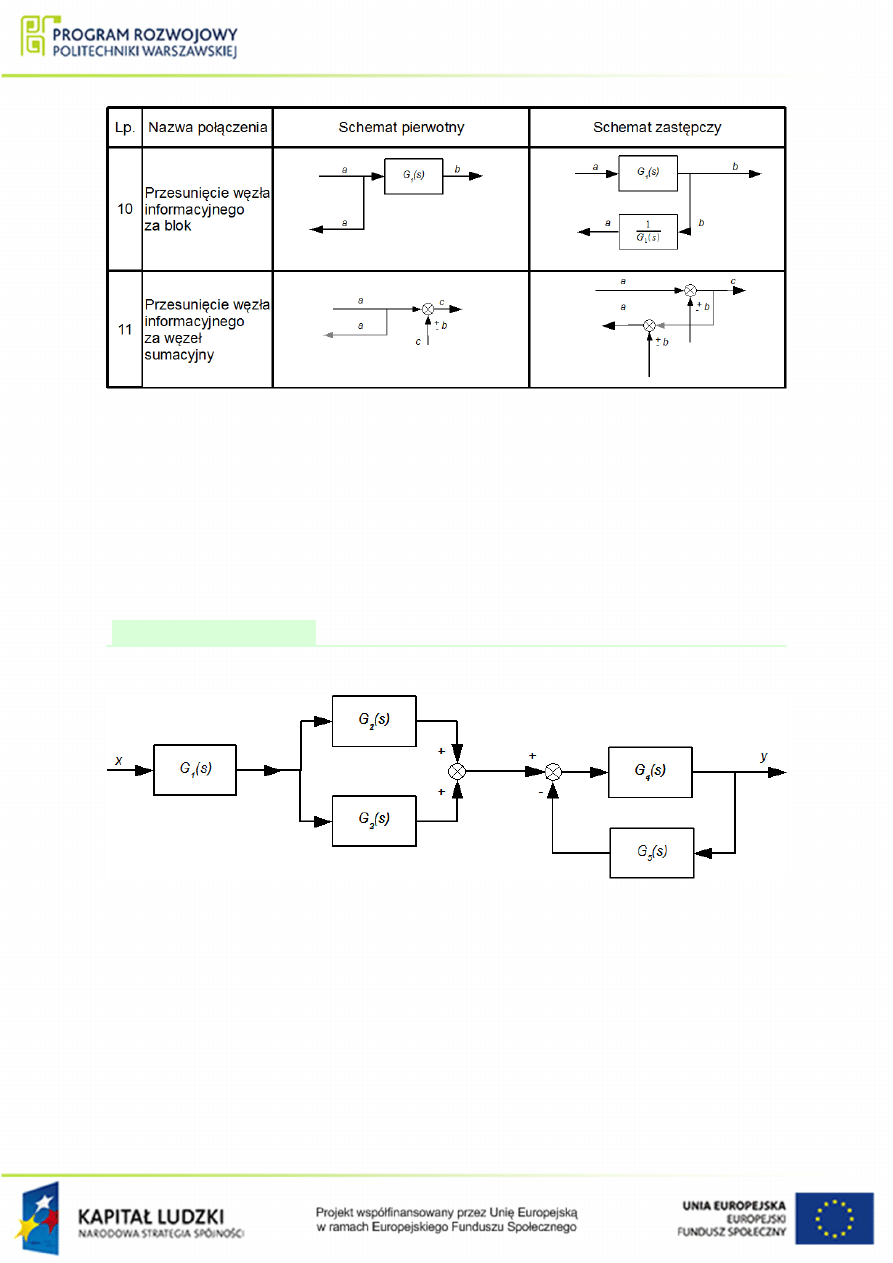
Przykªad 1.1
Wyznaczy¢ transmitancj¦ zast¦pcz¡ ukªadu przedstawionego na rys.
.
Rysunek 1.3 Ukªad poª¡cze« elementów do przykªadu
Rozwi¡zanie:
atwo zauwa»y¢, korzystaj¡c z tablicy
, »e w prosty sposób mo»na wyznaczy¢ dwie
transmitancje zast¦pcze Z
1
, Z
2
transmitancji G
2
, G
3
(poz. 2. poª¡czenie równolegªe) oraz
G
4
, G
5
(poz. 3. sprz¦»enie zwrotne) (rys
):
3
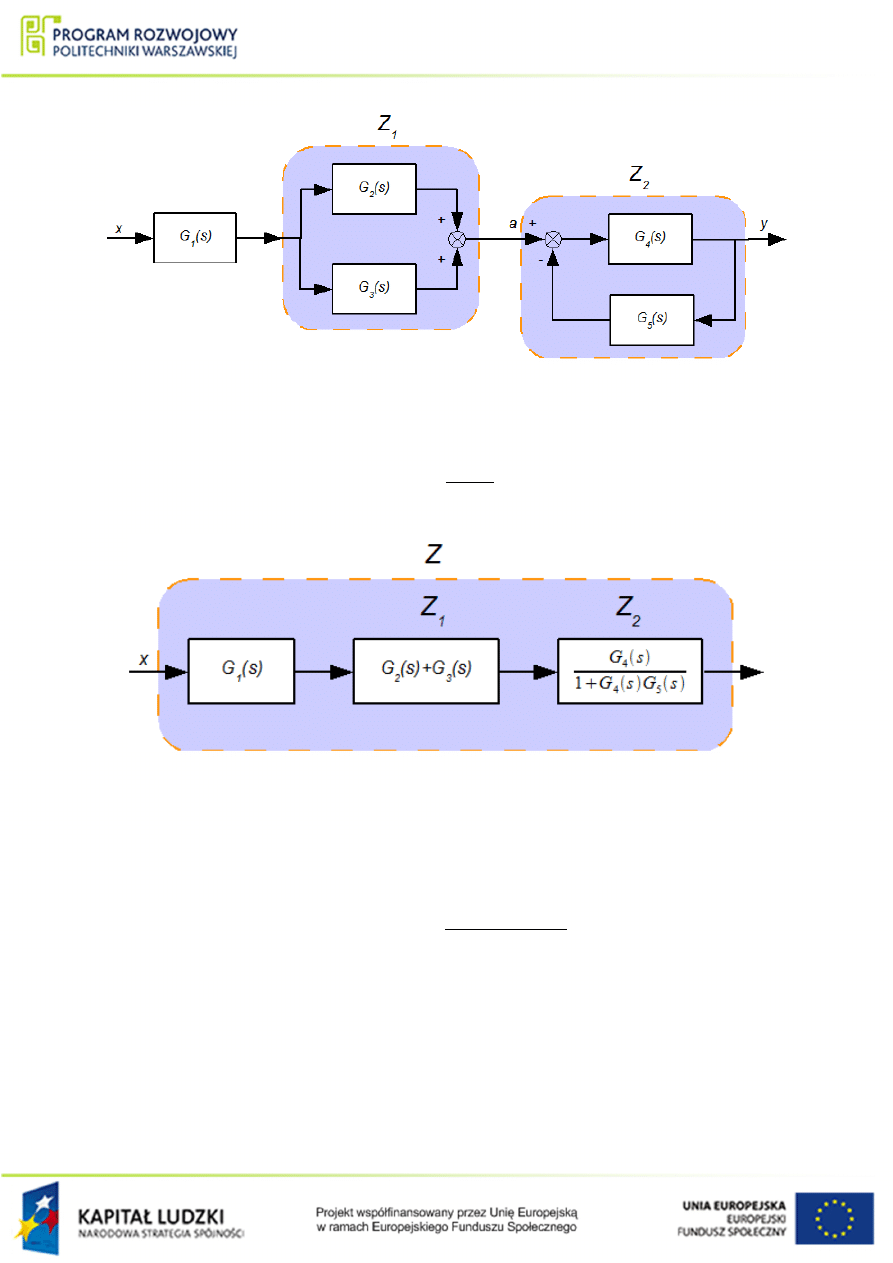
Rysunek 1.4 Wyznaczanie transmitancji zast¦pczych dla elementów o
transmitancjach G
2
, G
3
oraz G
4
, G
5
.
Przy czym Z
1
= G
2
+ G
3
, natomiast Z
2
=
G
4
1+G
4
G
5
. Wyj±ciowy ukªad mo»na wi¦c przed-
stawi¢ nast¦puj¡co:
Rysunek 1.5 Zmodykowany ukªad poª¡cze« dla przykªadu
Nast¦pnie wyznaczana jest transmitancja zast¦pcza caªego ukªadu wyj±ciowego Z(z ta-
blicy
. poz. 1, poª¡czenie szeregowe, rys.
), która wynosi¢ b¦dzie:
Z = G
1
Z
1
Z
2
=
G
1
G
4
(G
2
+ G
3
)
1 + G
4
G
5
(1.1)
4
Przykªad 1.2
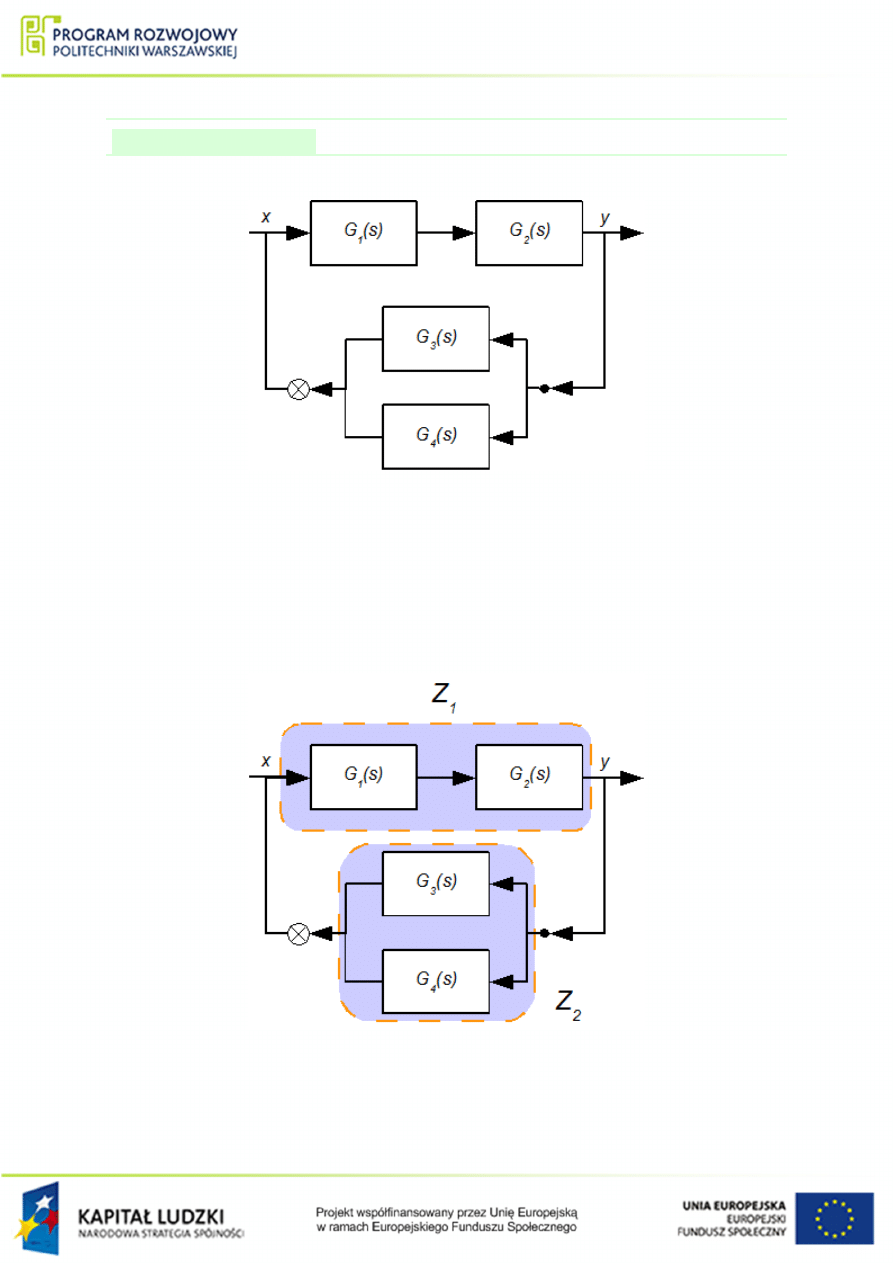
Wyznaczy¢ transmitancj¦ zast¦pcz¡ ukªadu przedstawionego na rys.
.
Rysunek 1.6 Ukªad poª¡cze« elementów do przykªadu
.
Rozwi¡zanie:
Podobnie jak w poprzednim przykªadzie (przykªad
) wyznaczamy dwie transmitancje
zast¦pcze Z
1
, Z
2
transmitancji G
1
, G
2
(poz. 1. poª¡czenie szeregowe) oraz G
3
, G
4
(poz. 3.
poª¡czenie równolegªe) (rys.
):
Rysunek 1.7 Wyznaczanie transmitancji zast¦pczych dla elementów o
transmitancjach G
1
, G
2
oraz G
3
, G
4
.
Przy czym Z
1
= G
2
G
3
, natomiast Z
2
= G
3
+G
4
. Wyj±ciowy ukªad mo»na wi¦c przedstawi¢
5
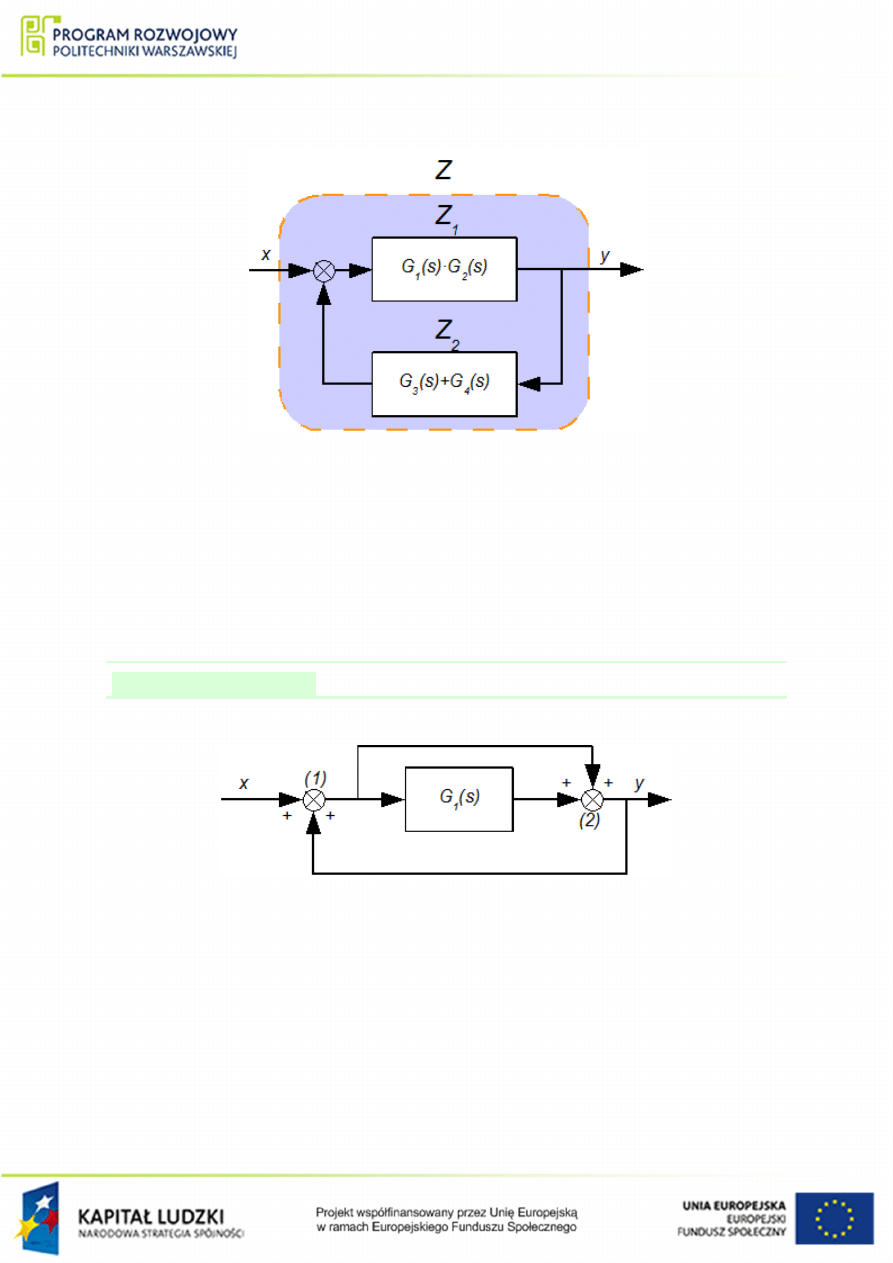
nast¦puj¡co:
Rysunek 1.8 Zmodykowany ukªad poª¡cze« dla przykªadu
.
Nast¦pnie wyznaczana jest transmitancja zast¦pcza caªego ukªadu wyj±ciowego Z(z ta-
blicy
. poz. 3, sprz¦»enie zwrotne, rys.
), która wynosi¢ b¦dzie:
(1.2)
Przykªad 1.3
Wyznaczy¢ transmitancj¦ zast¦pcz¡ ukªadu przedstawionego na rys.
.
Rysunek 1.9 Ukªad poª¡cze« elementów do przykªadu
.
Rozwi¡zanie:
W pierwszej kolejno±ci nale»y przenie±¢ w¦zeª sumacyjny (1) za czªon o transmitancji
G
1
(zgodnie z tablic¡
. poz. 8, przesuni¦cie w¦zªa sumacyjnego za blok), otrzymuj¡c
schemat jak na rys.
:
6
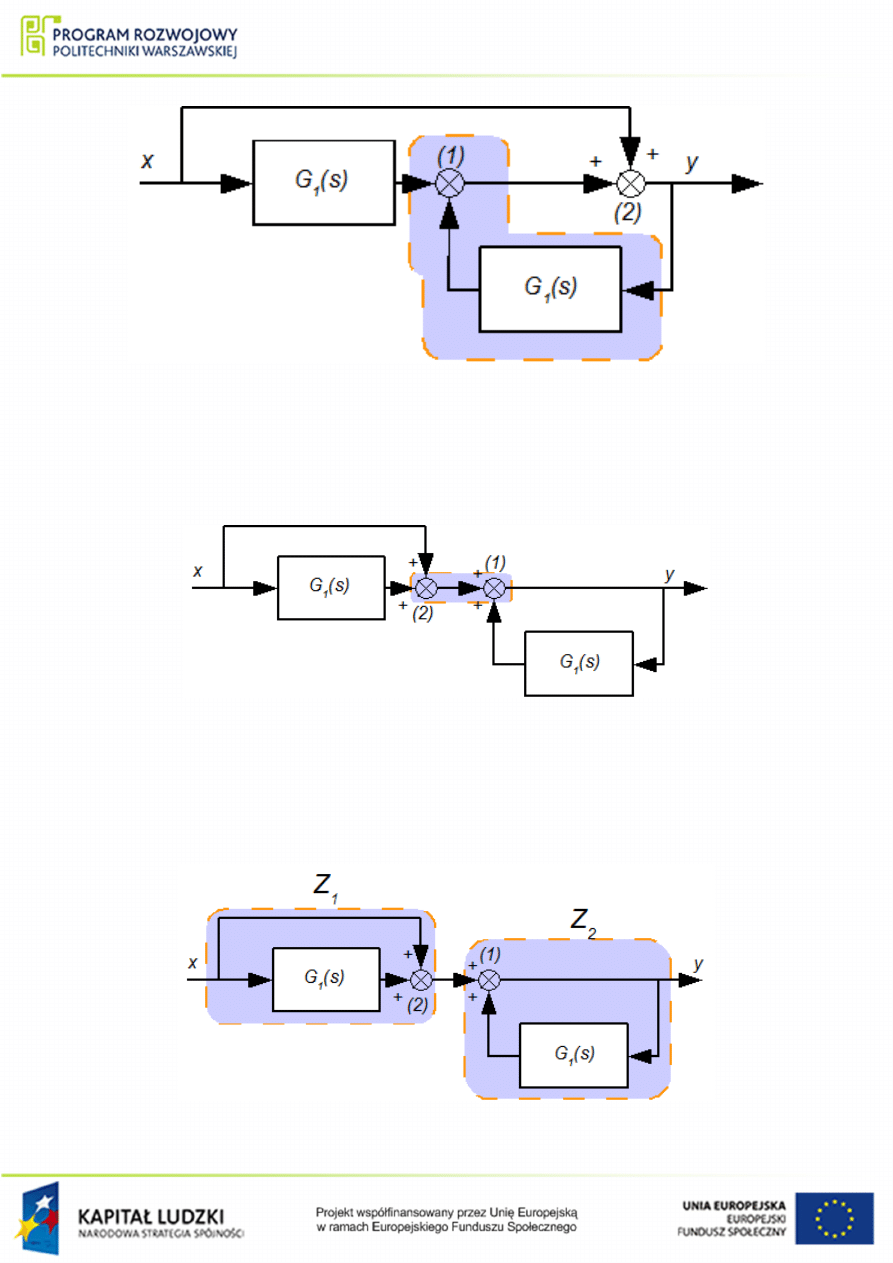
Rysunek 1.10 Zmodykowany ukªad poª¡cze« dla przykªadu
.
Nast¦pnie nale»y przestawi¢ kolejno±¢ w¦zªów sumacyjnych (1) oraz (2) (zgodnie z tablic¡
. poz. 4, zmiana kolejno±ci w¦zªów sumacyjnych), otrzymuj¡c schemat jak na rys.
:
Rysunek 1.11 Zmodykowany ukªad poª¡cze« dla przykªadu
.
Dzi¦ki zamianie w¦zªów sumacyjnych mo»na upro±ci¢ uzyskany schemat do dwóch trans-
mitancji zast¦pczych Z
1,
Z
2
, a nast¦pnie wyznaczy¢ transmitancj¦ zast¦pcz¡ ukªadu (rys.
)
Rysunek 1.12 Zmodykowany ukªad poª¡cze« dla przykªadu
.
7
Transmitancja zast¦pcza b¦dzie miaªa posta¢:
Z = Z
1
Z
2
= (G
1
+ 1)
1
(1 − G
1
)
=
1 + G
1
1 − G
1
(1.3)
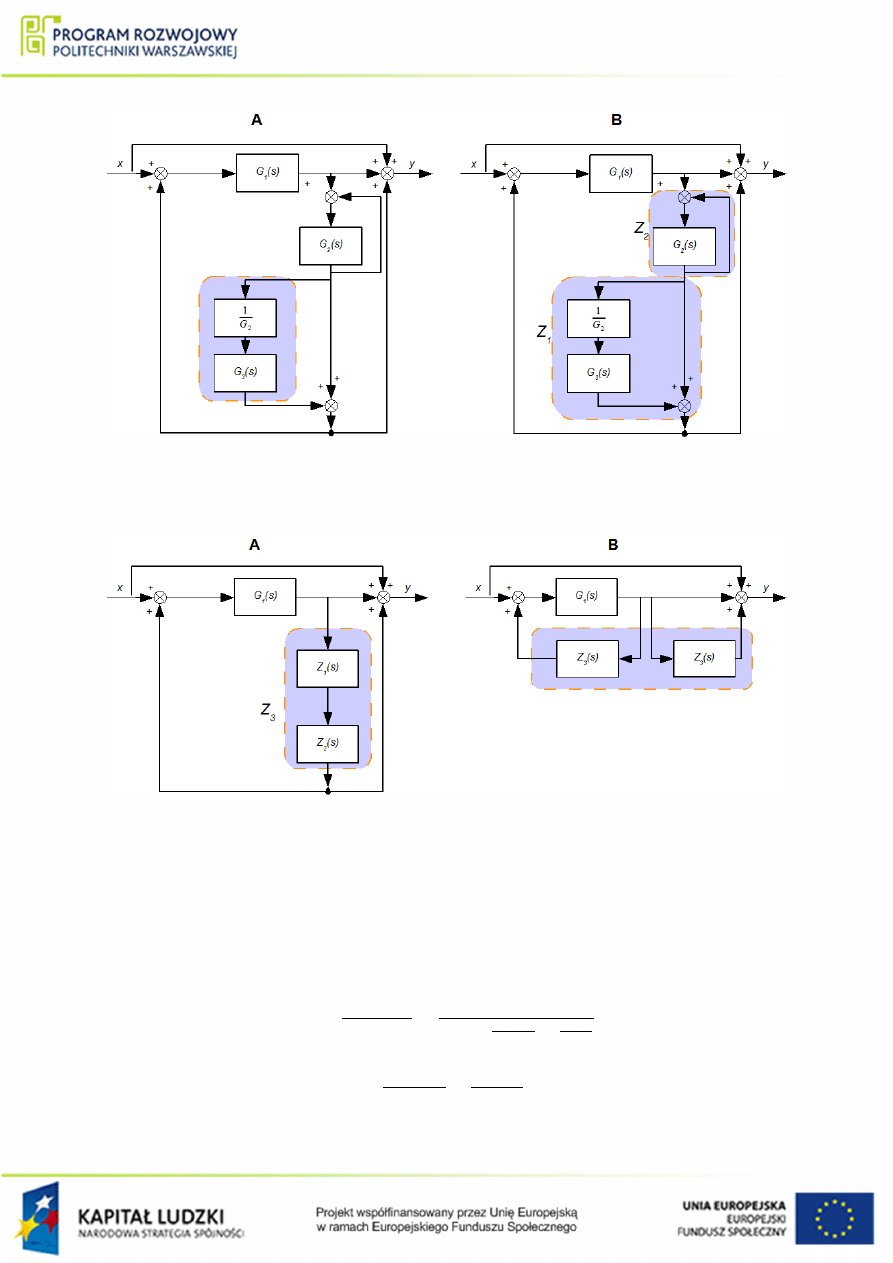
Przykªad 1.4
Wyznaczy¢ transmitancj¦ zast¦pcz¡ ukªadu przedstawionego na rys.
.
Rysunek 1.13 Ukªad poª¡cze« elementów do przykªadu
W zadaniu tym, na pocz¡tek nale»y przesun¡¢ w¦zeª informacyjny przy transmitancji G
3
za blok o transmitancji G
2
(zgodnie z tablic¡
poz. 10, przesuni¦cie w¦zªa informacyj-
nego za blok) rys.
A. Nast¦pnie wyznaczane s¡ dwie transmitancje zast¦pcze Z
1,
Z
2
dla elementów zaznaczonych na rys.
B. Wynosz¡ one odpowiednio (sprz¦»enie zwrotne
oraz poª¡czenie szeregowe patrz j.w.):
Z
1
=
1
G
2
G
3
+ 1 =
G
3
G
2
+ 1
(1.4)
Z
2
=
G
2
1 + G
2
(1.5)
Uzyskano w ten sposób ukªad poª¡cze« jak na rys.
A, transmitancja zast¦pcza Z
3
wynosi:
Z
3
= Z
1
Z
2
=
G
3
G
2
+ 1
G
2
1 + G
2
=
G
3
G
2
G
2
2
+ G
2
+
G
2
1 + G
2
(1.6)
8
Rysunek 1.14 Zmodykowany ukªad poª¡cze« elementów do przykªadu
Rysunek 1.15 Zmodykowany ukªad poª¡cze« elementów do przykªadu
. Krok
drugi.
Nast¦pnie dzielimy w¦zeª informacyjny transmitancji Z
3
na dwie cz¦±ci (rys.
B).
W kolejnym kroku przesuwamy w¦zeª sumacyjny oraz wyznaczamy dwie transmitancje
zast¦pcze Z
4
, Z
5
(rys.
A), które wynosz¡ odpowiednio:
Z
4
=
G
1
1 + G
1
Z
3
=
G
1
1 + G
1
G
3
G
2
G
2
2
+G
2
+
G
2
1+G
2
(1.7)
Z
5
=
G
3
G
2
G
2
2
+ G
2
+
G
2
1 + G
2
+ 1
(1.8)
9
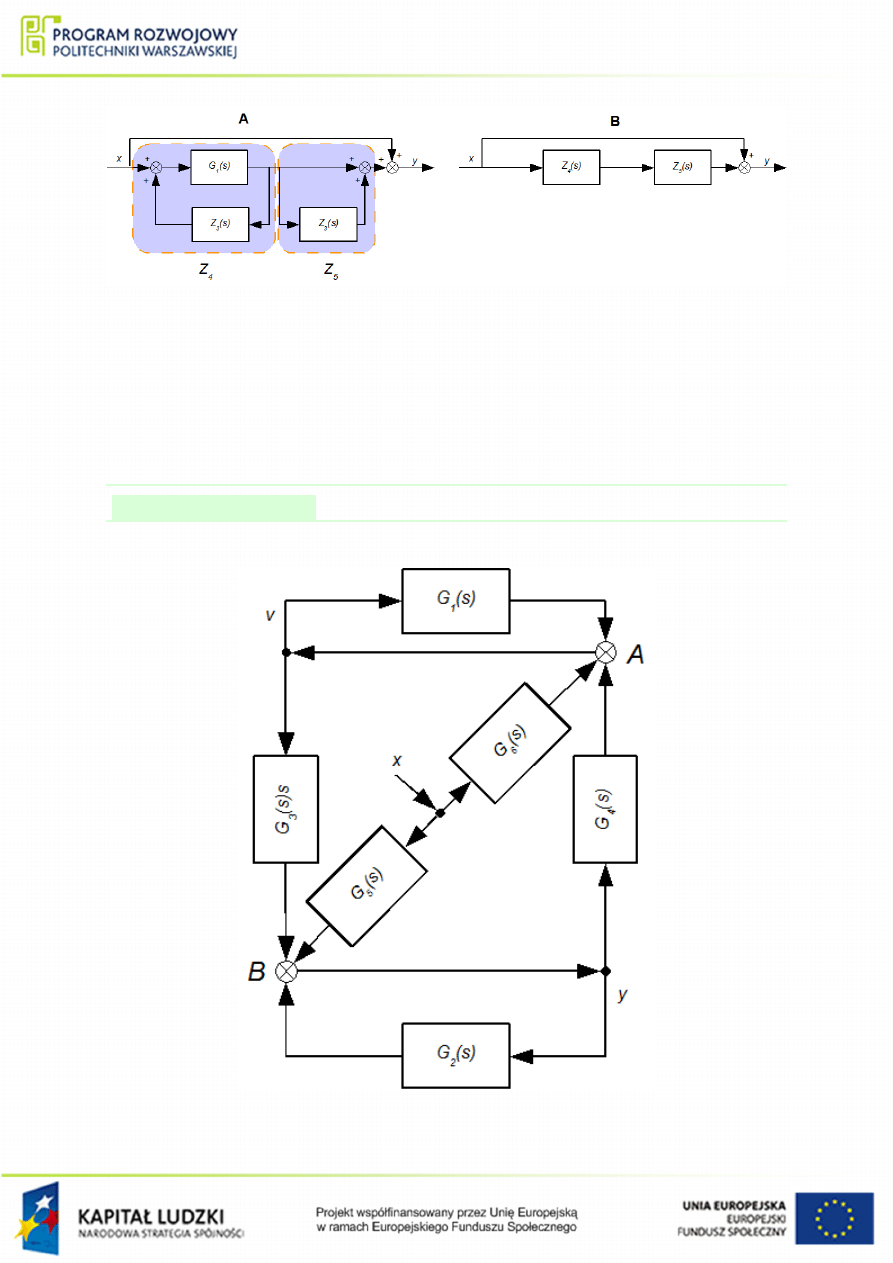
Rysunek 1.16 Zmodykowany ukªad poª¡cze« elementów do przykªadu
. Krok
trzeci.
Ostatecznie transmitancja zast¦pcza Z caªego ukªadu wynosi (rys.
B):
Z = (Z
4
Z
5
) + 1
(1.9)
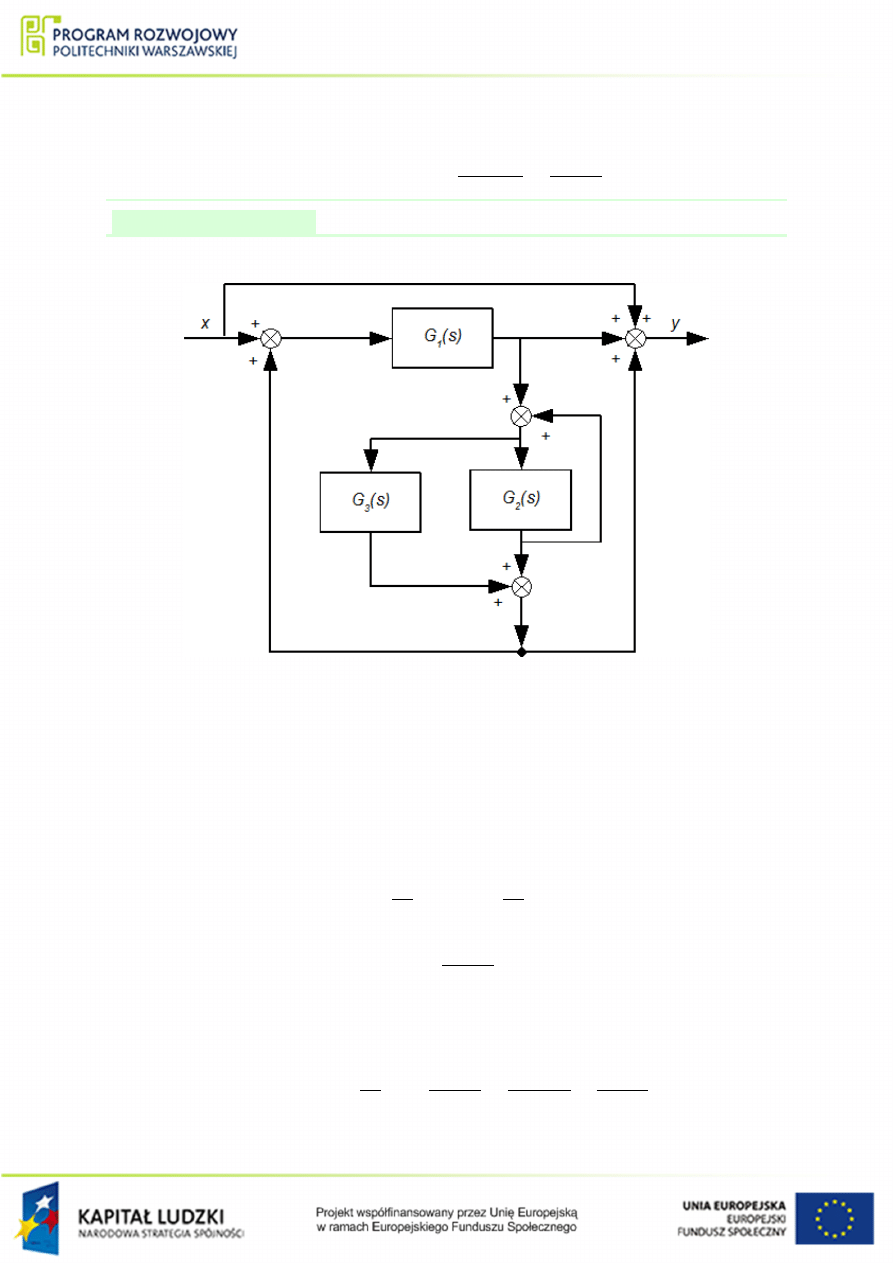
Przykªad 1.5
Wyznaczy¢ transmitancj¦ zast¦pcz¡ ukªadu przedstawionego na rys.
.
Rysunek 1.17 Ukªad poª¡cze« elementów do przykªadu
.
10
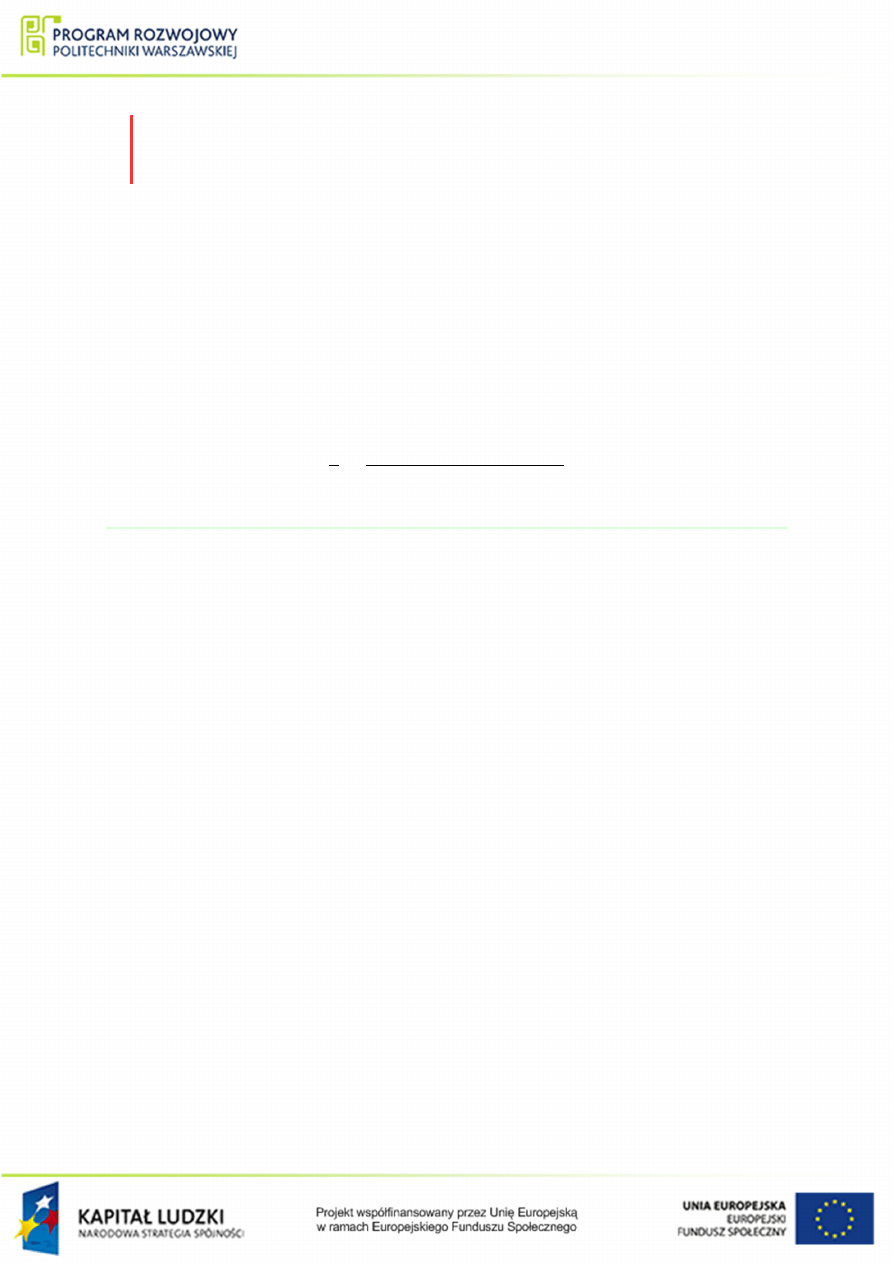
Wskazówka: W podanym przykªadzie pro±ciej jest wyznaczy¢ równania dla w¦zªów
sumacyjnych A i B i analitycznie wyznaczy¢ poszukiwan¡ transmitancj¦ zast¦pcz¡.
W odniesieniu do w¦zªa sumacyjnego A sªuszne jest równanie:
v = vG
1
+ xG
6
+ yG
4
(1.10)
a w odniesieniu do w¦zªa sumacyjnego B równanie:
y = yG
2
+ xG
5
+ vG
3
(1.11)
Ruguj¡c z powy»szych równa« zmienn¡ v otrzymuje si¦:
y
x
=
G
6
(1 − G
2
) + G
4
G
5
(1 − G
1
) (1 − G
2
) − G
3
G
4
(1.12)
Co jest szukan¡ transmitancj¡ zast¦pcz¡.
11
1.1.3 Zadania do samodzielnego rozwi¡zania
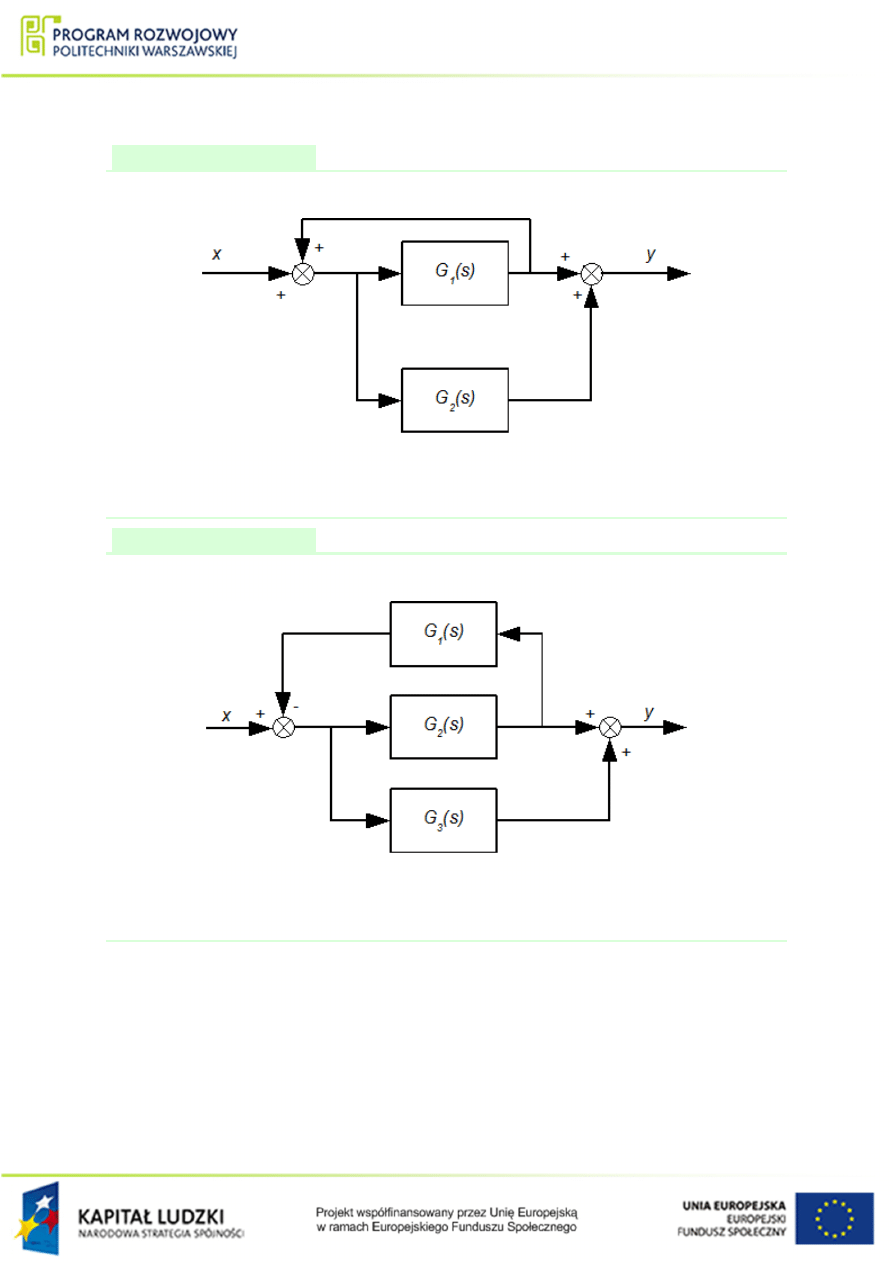
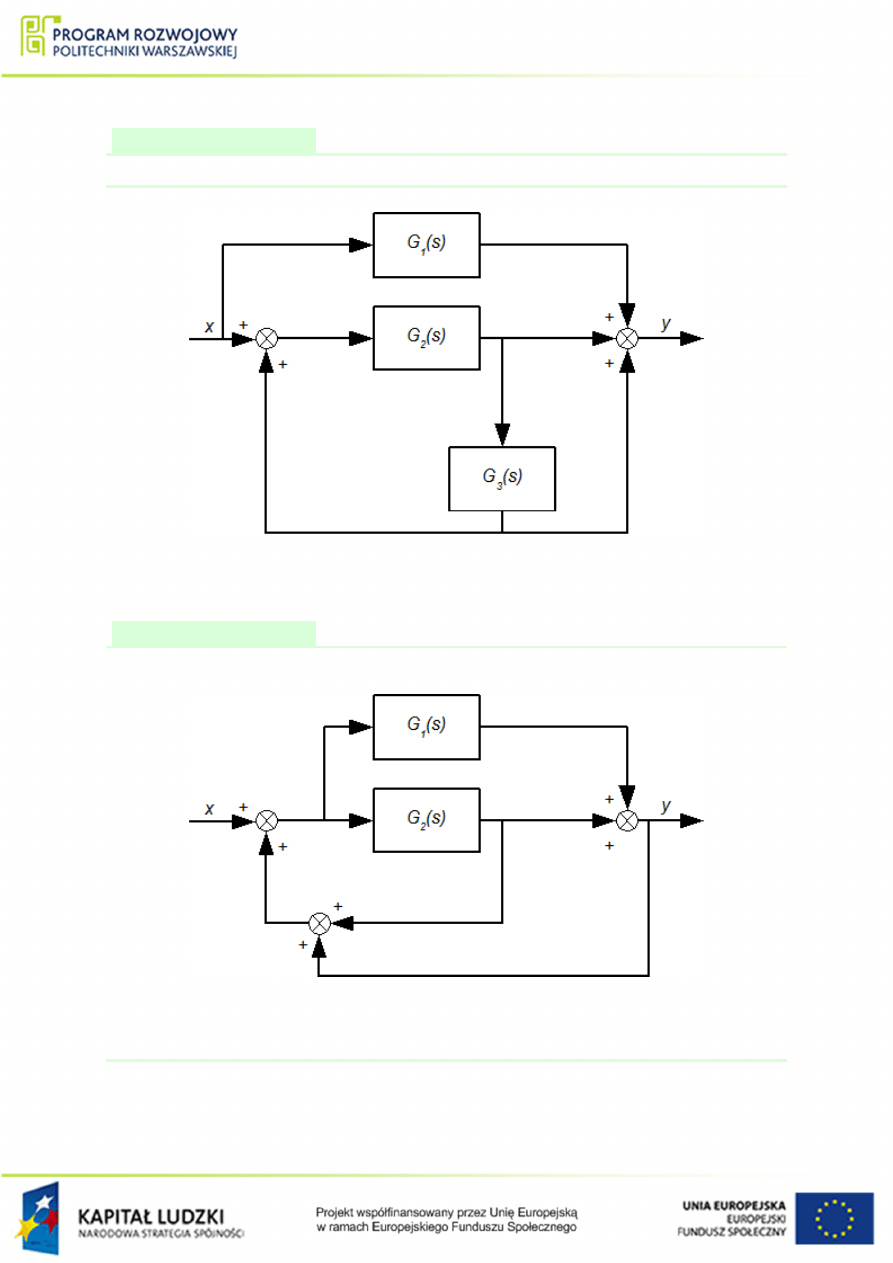
Przykªad 1.6
Wyznaczy¢ transmitancj¦ zast¦pcz¡ ukªadu przedstawionego na rys.
Rysunek 1.18 Ukªad poª¡cze« elementów do przykªadu
Przykªad 1.7
Wyznaczy¢ transmitancj¦ zast¦pcz¡ ukªadu przedstawionego na rys.
.
Rysunek 1.19 Schemat poª¡cze« elementów do przykªadu
.
12
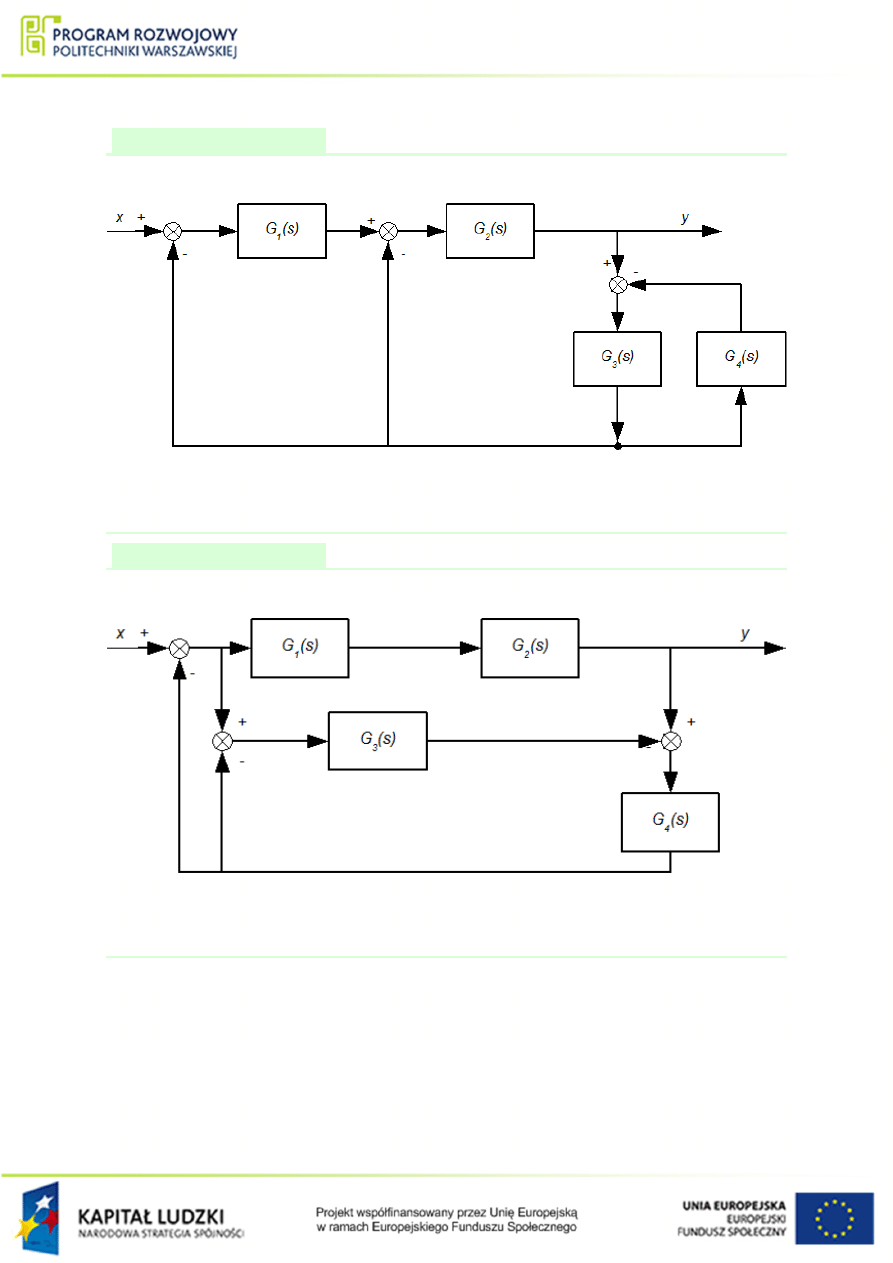
Przykªad 1.8
Wyznaczy¢ transmitancj¦ zast¦pcz¡ ukªadu przedstawionego na rys.
Rysunek 1.20 Schemat poª¡cze« elementów do przykªadu
.
Przykªad 1.9
Wyznaczy¢ transmitancj¦ zast¦pcz¡ ukªadu przedstawionego na rys.
Rysunek 1.21 Schemat poª¡cze« elementów do przykªadu
13
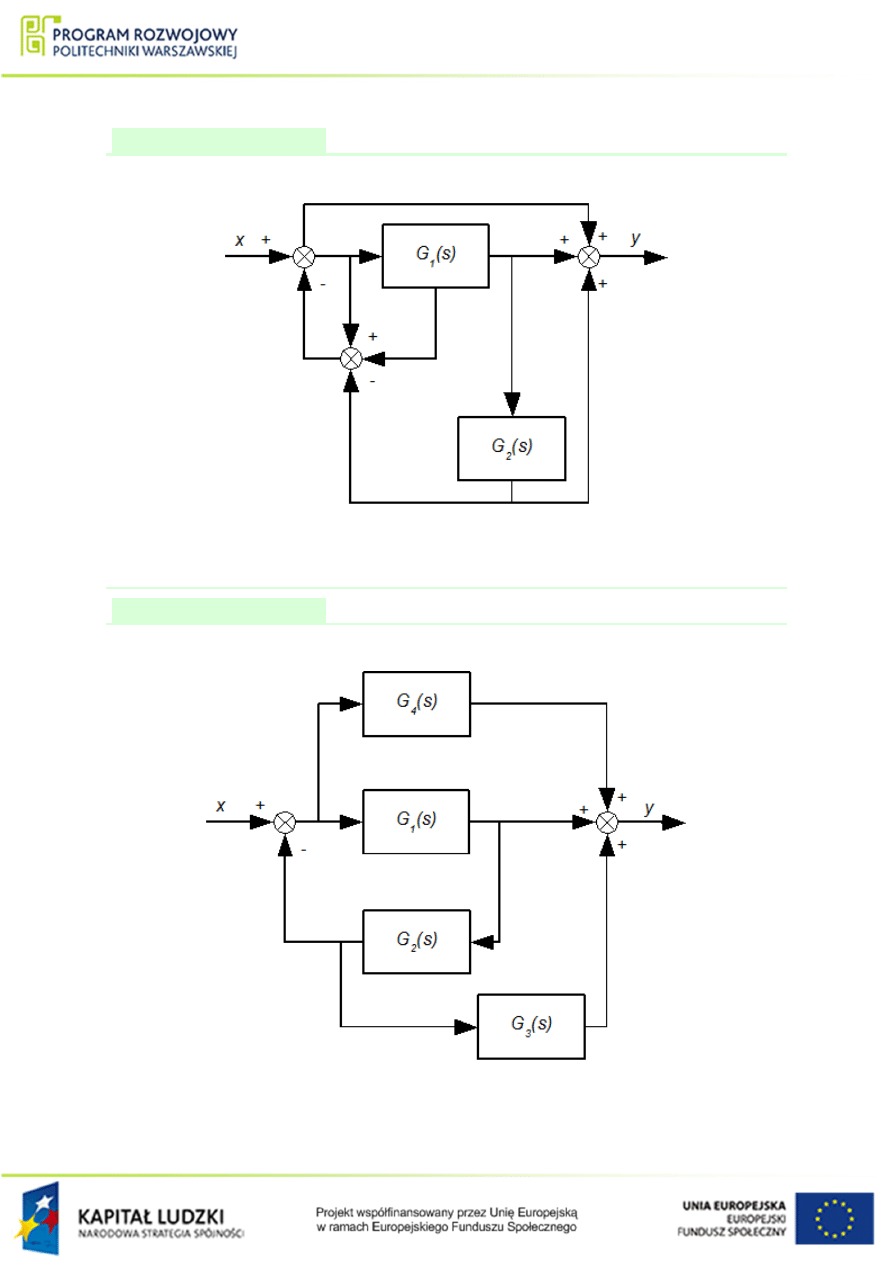
Przykªad 1.10
Wyznaczy¢ transmitancj¦ zast¦pcz¡ ukªadu przedstawionego na rys.
Rysunek 1.22 Schemat poª¡cze« elementów do przykªadu
Przykªad 1.11
Wyznaczy¢ transmitancj¦ zast¦pcz¡ ukªadu przedstawionego na rys.
Rysunek 1.23 Schemat poª¡cze« elementów do przykªadu
14
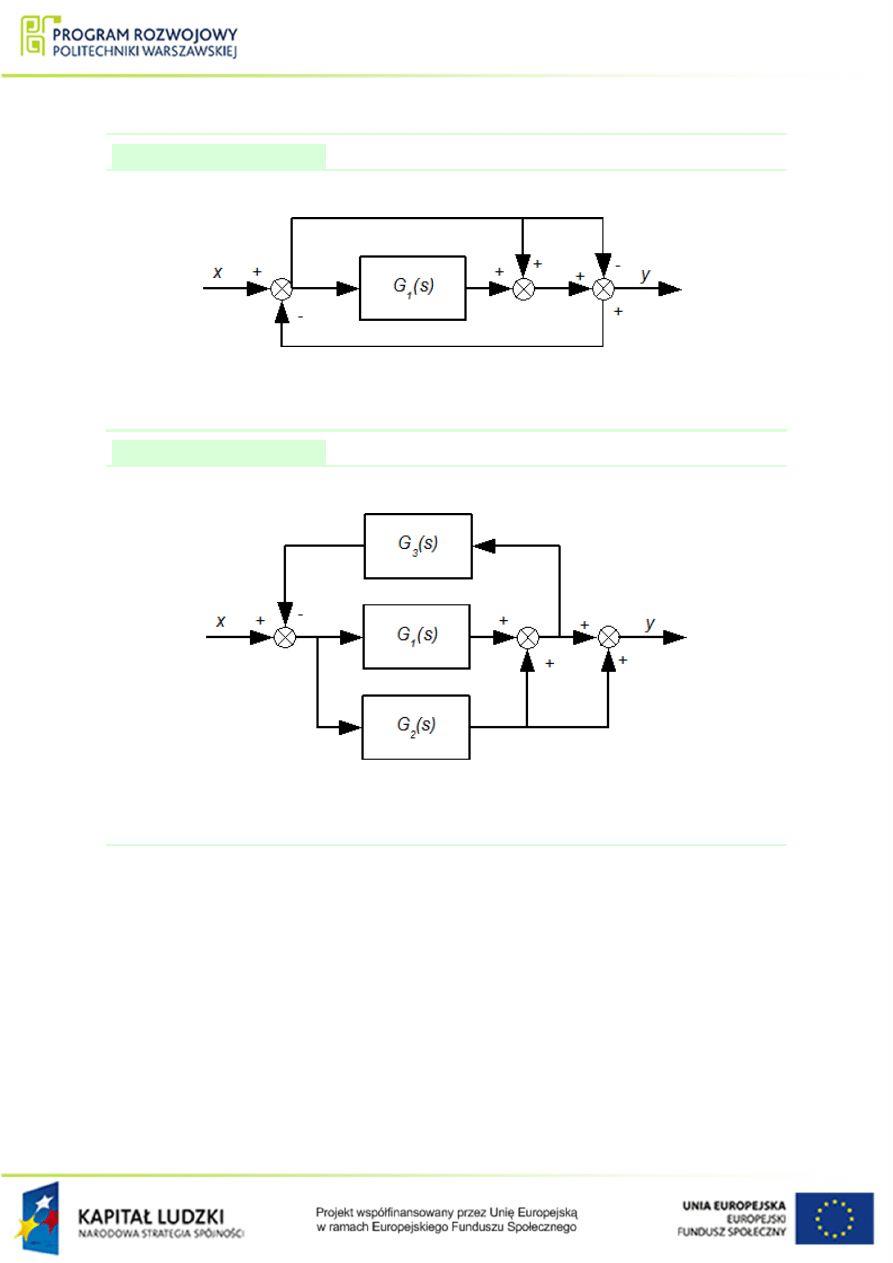
Przykªad 1.12
Wyznaczy¢ transmitancj¦ zast¦pcz¡ ukªadu przedstawionego na rys.
Rysunek 1.24 Schemat poª¡cze« elementów do przykªadu
Przykªad 1.13
Wyznaczy¢ transmitancj¦ zast¦pcz¡ ukªadu przedstawionego na rys.
Rysunek 1.25 Schemat poª¡cze« elementów do przykªadu
15
Przykªad 1.14
Wyznaczy¢ transmitancj¦ zast¦pcz¡ ukªadu przedstawionego na rys.
Rysunek 1.26 Schemat poª¡cze« elementów do przykªadu
Przykªad 1.15
Wyznaczy¢ transmitancj¦ zast¦pcz¡ ukªadu przedstawionego na rys.
Rysunek 1.27 Schemat poª¡cze« elementów do przykªadu
16
1.2 Schematy blokowe ukªadów automatyki
Analizuj¡c ukªady automatyki pro±ciej jest wykorzystywa¢ schematy blokowe ni» schematy
technologiczne. Utworzenie schematu blokowego, skªadaj¡cego si¦ z szeregu transmitancji
operatorowych wymaga opisania poszczególnych zespoªów technologicznych odpowiednimi
równaniami, a nast¦pnie wyznaczenia na tej podstawie transmitancji operatorowych. Wy-
znaczone transmitancje ukªadane s¡ nast¦pnie w schemat blokowy, na podstawie, którego
mo»na wyznaczy¢ transmitancj¦ zast¦pcz¡ caªego ukªadu.
1.2.1 Przykªady zada«
Przykªad 1.16
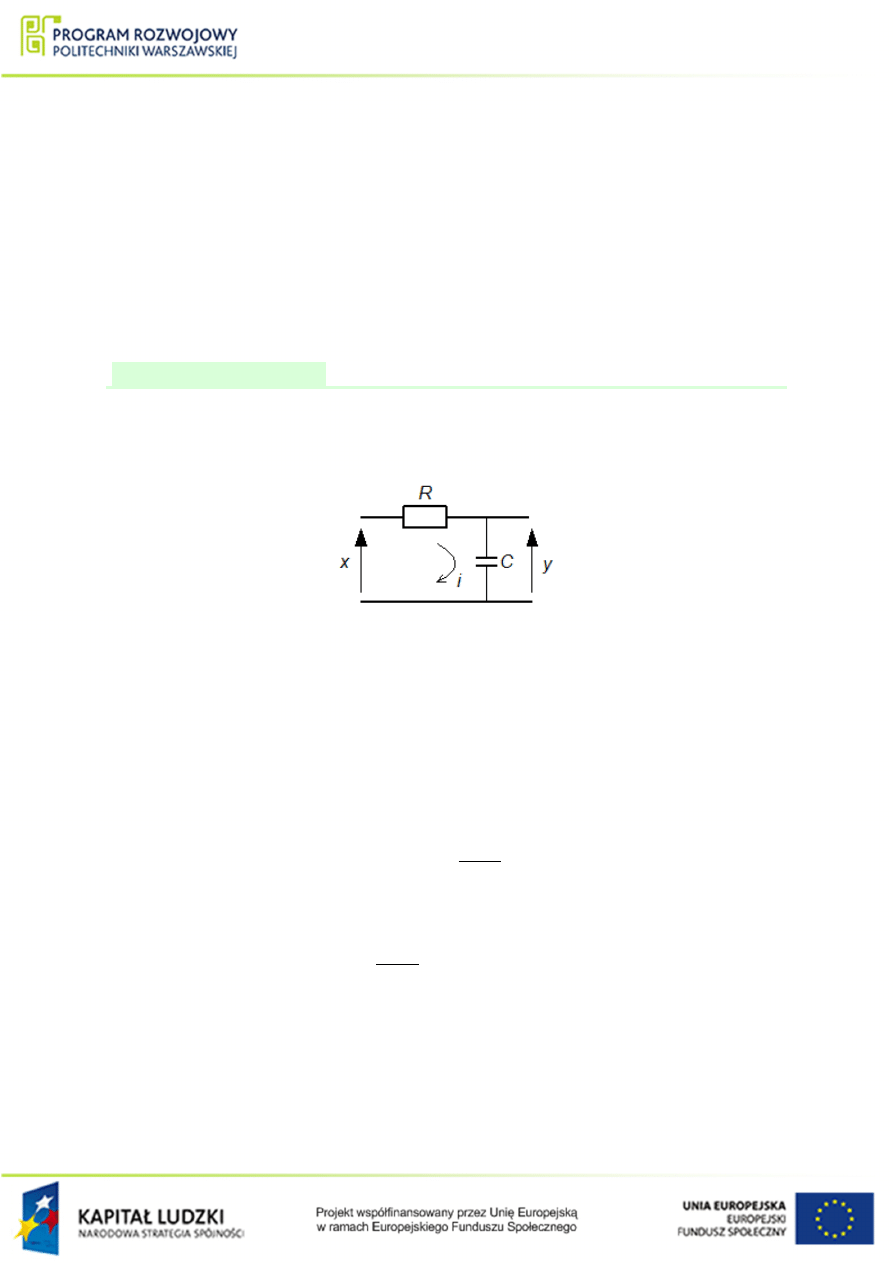
Narysowa¢ schemat blokowy oraz wyznaczy¢ transmitancj¦ ukªadu elektrycznego przed-
stawionego na rys.
. Wymuszeniem jest napi¦cie x, natomiast wyj±ciem obiektu na-
pi¦cie oznaczone jako y.
Rysunek 1.28 Schemat prostego ukªadu elektrycznego do przykªadu
Napi¦cie x mo»na okre±li¢ jako:
x (t) = Ri (t) + y (t)
(1.13)
przy czym:
i (t) = C
dy (t)
dt
(1.14)
Z zale»no±ci (
), (
) mo»na wyznaczy¢ równanie ró»niczkowe ukªadu:
T
dy (t)
dt
+ y (t) = x (t)
(1.15)
gdzie:
T = RC
(1.16)
Dziaªaj¡c na równanie (
) transformat¡ Laplace'a otrzymujemy:
T sy (s) + y (s) = x (s) ⇒ y (s) (Ts + 1) = x (s)
(1.17)
17
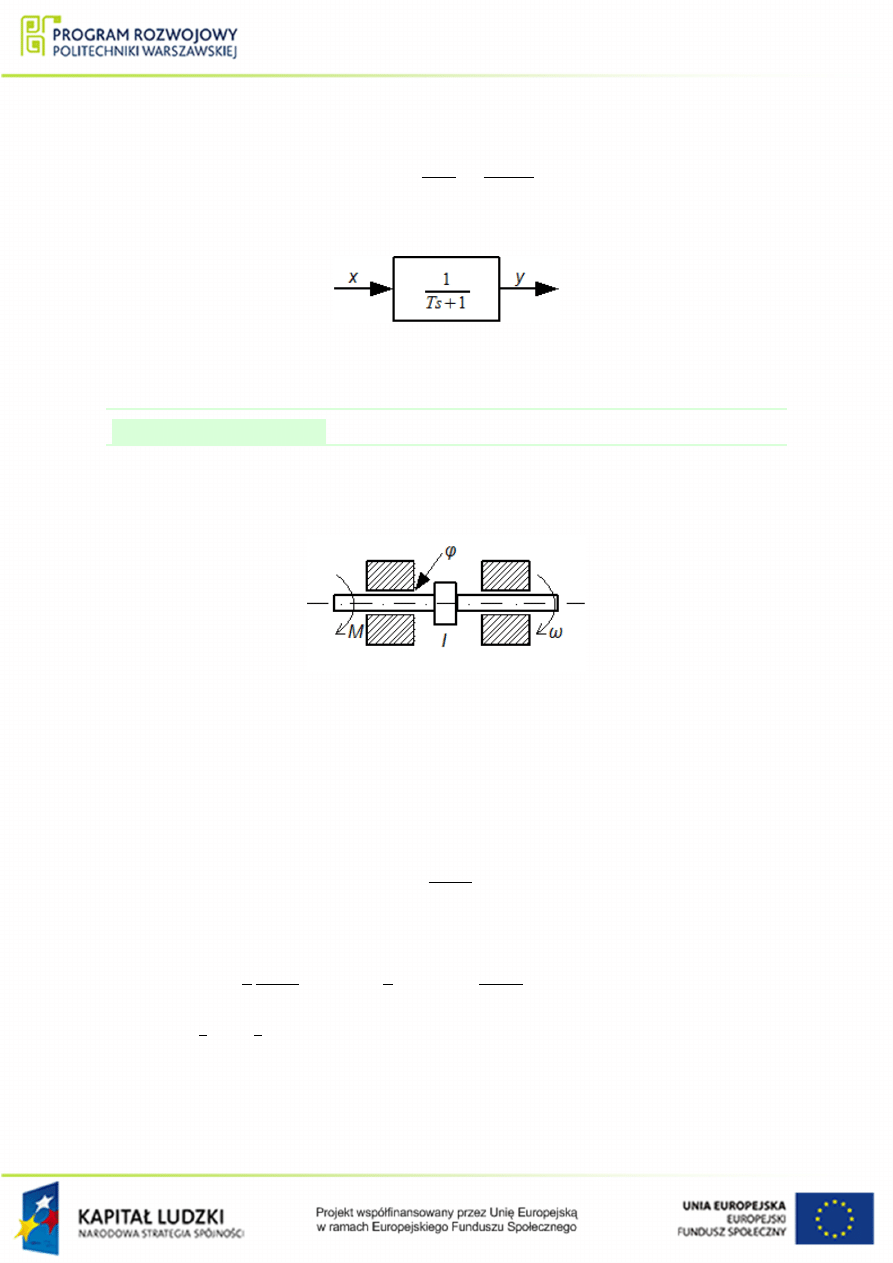
Transmitancja ukªadu wynosi wi¦c:
G (s) =
y (s)
x (s)
=
1
Ts + 1
(1.18)
A jego schemat blokowy mo»na przedstawi¢ nast¦puj¡co:
Rysunek 1.29 Schemat blokowy ukªadu z rys.
.
Przykªad 1.17
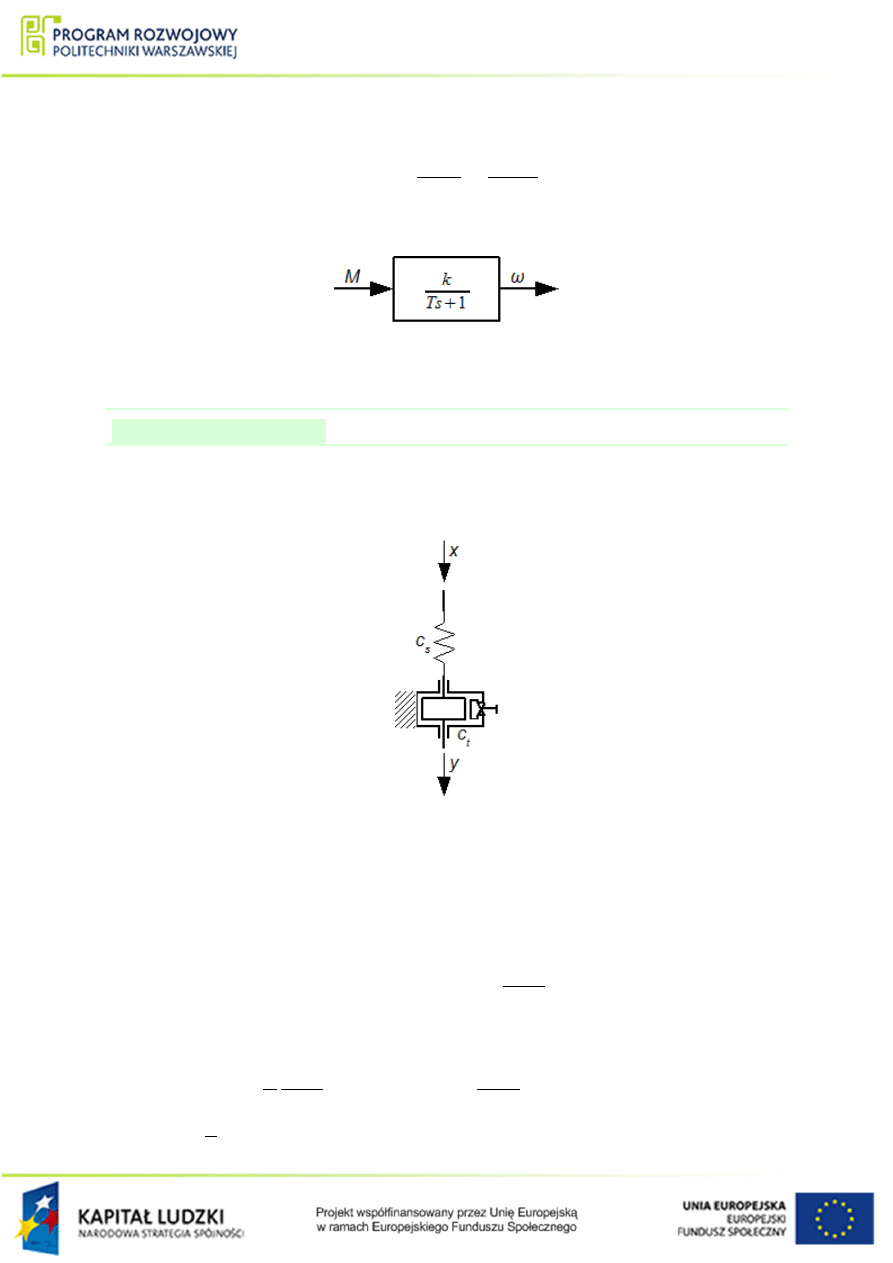
Narysowa¢ schemat blokowy oraz wyznaczy¢ transmitancj¦ ukªadu mechanicznego przed-
stawionego na rys.
. Wymuszeniem jest moment obrotowy M przyªo»ony do waªu
wyj±ciem pr¦dko±¢ k¡towa ω.
Rysunek 1.30 Schemat prostego ukªadu mechanicznego do przykªadu
.
Gdzie: M - moment obrotowy, φ - wspóªczynnik tarcia lepkiego, I- moment bezwªadno±ci,
ω
- pr¦dko±¢ k¡towa.
Z II zasady dynamiki Newtona dla ruchu obrotowego mo»na napisa¢, »e:
M (t) = I
dω (t)
dt
+ φω (t)
(1.19)
A nast¦pnie, »e:
I
φ
dω (t)
dt
+ ω (t) =
1
φ
M (t) ⇒ T
dω (t)
dt
+ ω (t) = kM (t)
(1.20)
Gdzie :T =
I
φ
, k =
1
φ
.
Dziaªaj¡c na równanie (
) transformat¡ Laplace'a otrzymujemy:
T sω (s) + ω (s) = kM (s) ⇒ ω (s) (Ts + 1) = kM (s)
(1.21)
18
Transmitancja ukªadu wynosi wi¦c:
G (s) =
ω (s)
M (s)
=
k
Ts + 1
(1.22)
A jego schemat blokowy mo»na przedstawi¢ nast¦puj¡co:
Rysunek 1.31 Schemat blokowy ukªadu z rys.
.
Przykªad 1.18
Narysowa¢ schemat blokowy oraz wyznaczy¢ transmitancj¦ ukªadu mechanicznego przed-
stawionego na rys.
. Wymuszeniem jest przesuni¦cie x natomiast wyj±ciem przesu-
ni¦cie y.
Rysunek 1.32 Schemat prostego ukªadu mechanicznego do przykªadu
.
Gdzie: c
s
- staªa spr¦»ysto±ci spr¦»yny, c
t
- staªa tªumienia tªumika pneumatycznego.
Równanie siª przedstawionego ukªadu wygl¡da nast¦puj¡co:
(x (t) − y (t)) c
s
= c
t
dy (t)
dt
(1.23)
Z równania (
) mamy:
c
t
c
s
dy (t)
dt
+ y (t) = x (t) ⇒ T
dy (t)
dt
+ y (t) = x (t)
(1.24)
Gdzie: T =
c
t
c
s
.
19
Dziaªaj¡c na równanie (
) transformat¡ Laplace'a otrzymujemy:
Tsy (s) + y (s) = x (s) ⇒ y (s) (Ts + 1) = x (s)
(1.25)
Transmitancja ukªadu wynosi wi¦c:
G (s) =
y (s)
x (s)
=
1
Ts + 1
(1.26)
A jego schemat blokowy mo»na przedstawi¢ nast¦puj¡co:
Rysunek 1.33 Schemat blokowy ukªadu z rys.
Przykªad 1.19
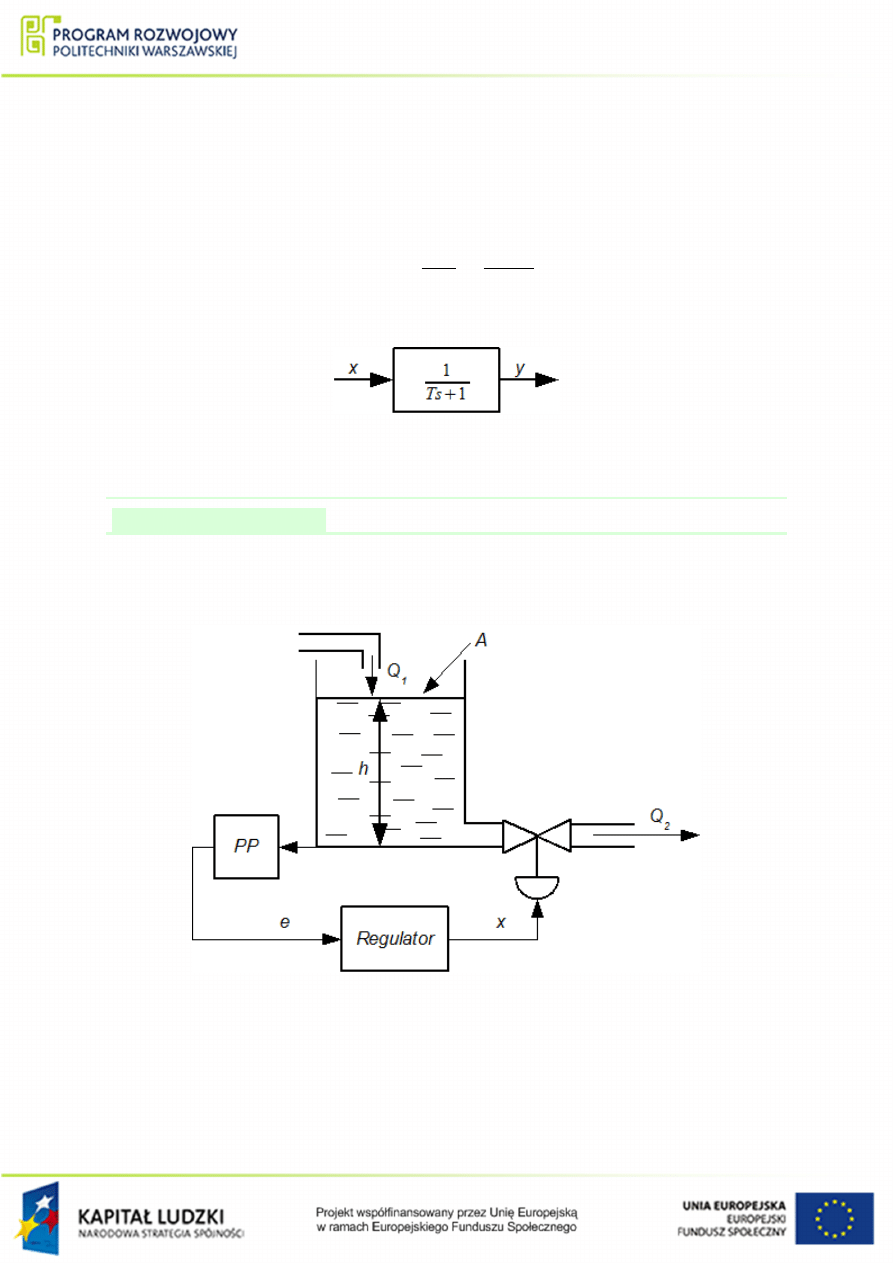
Przykªad ten zostaª zaczerpni¦ty z [?] . Narysowa¢ schemat blokowy oraz wyznaczy¢
transmitancj¦ ukªadu przedstawionego na rys.
. Wymuszeniem jest nat¦»enie prze-
pªywu cieczy Q
1
a wyj±ciem poziom cieczy w zbiorniku h.
Rysunek 1.34 Schemat ukªadu regulacji automatycznej dla przykªadu
.
Charakterystyka przetwornika pomiarowego (element oznaczony jako PP , na rys.
)
wygl¡da nast¦puj¡co:
20
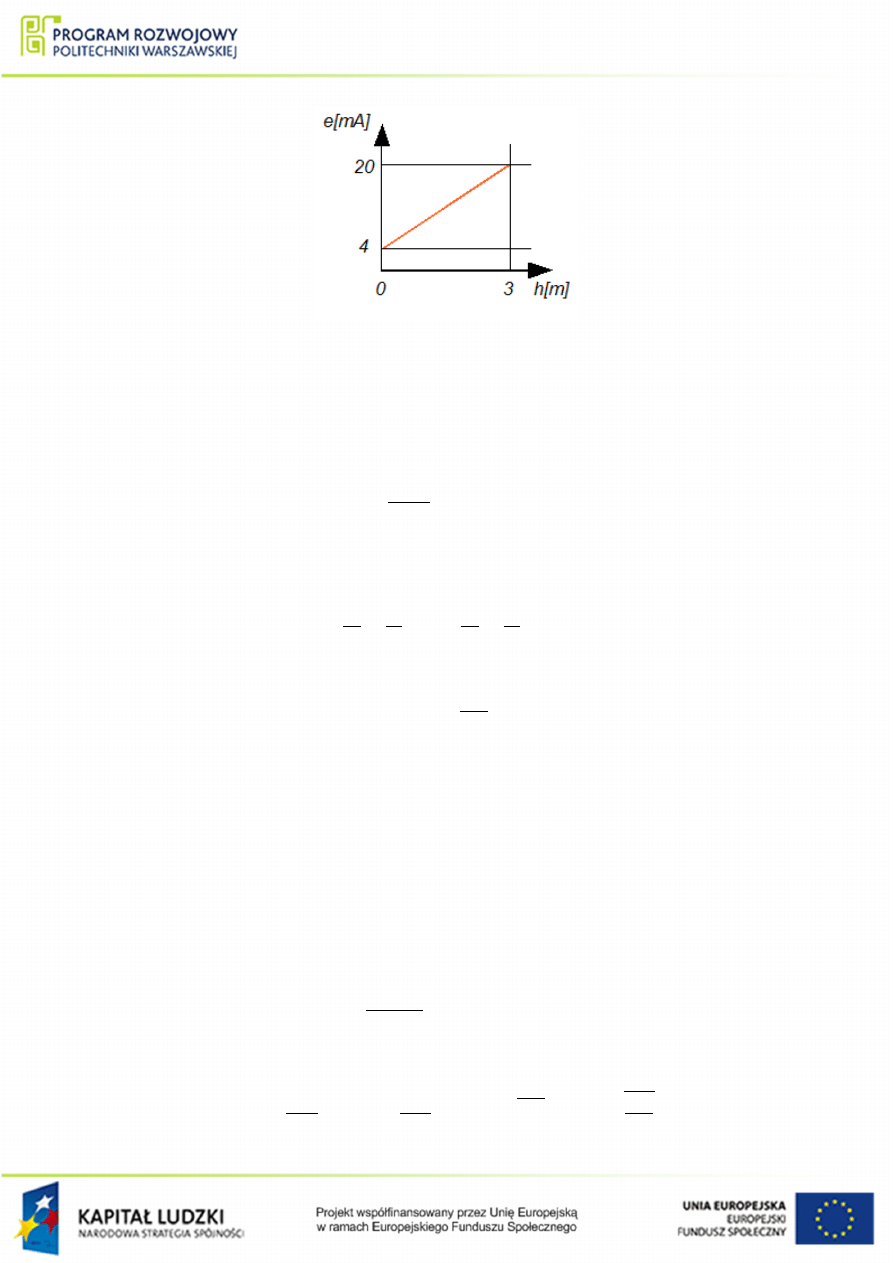
Rysunek 1.35 Charakterystyka przetwornika pomiarowego dla przykªadu
.
W pierwszej kolejno±ci wyznaczona zostanie transmitancja obiektu regulacji. W stanach
nieustalonych zmiany poziomu cieczy w zbiorniku mo»na opisa¢ za pomoc¡ zale»no±ci:
A
dh (t)
dt
= Q
1
− Q
2
(1.27)
Nat¦»enie przepªywu Q
2
mo»na obliczy¢ z równania Bernoulli'ego dla poziomu lustra
cieczy (1) oraz wypªywu ze zbiornika (2) mo»na zapisa¢ nast¦puj¡co:
v
2
1
2g
+
p
1
γ
+ h =
v
2
2
2g
+
p
2
γ
+ 0
(1.28)
Przyjmuj¡c v
1
= 0
oraz p
1
= p
2
otrzymuje si¦:
v
2
=
q
2gh
(1.29)
Na podstawie równania ci¡gªo±ci przepªywu tzn.:
Q
2
= f v
2
(1.30)
gdzie f - pole przekroju kanaªu zaworu.
Nast¦pnie nale»y zlinearyzowa¢ przedstawione równanie w wybranym punkcie pracy, ozna-
czonym h
n
, Q
1n
, f
n
. W otoczeniu wybranego punktu pracy przyrosty zmiennych h oraz Q
2
zast¦puje si¦ ich liniowymi aproksymacjami. Dla odró»nienia zapisu wszystkie przyrosty
oznaczane s¡ wi¦c poprzez dodanie symbolu ∆:
A
d∆h (t)
dt
= ∆Q
1
− ∆Q
2
(1.31)
Przyrost ∆Q
2
zast¡piony zostaje ró»niczk¡ zupeªn¡:
∆Q
2
=
∂Q
2
∂f
!
n
∆f +
∂Q
2
∂h
!
n
∆h =
q
2gh∆f + f
n
s
g
2h
n
∆h
(1.32)
21
Zale»no±¢ (
) mo»na wi¦c zapisa¢ jako:
T
d∆h (t)
dt
+ ∆h (t) = k
1
∆Q
1
(t) − k
2
∆f (t)
(1.33)
Gdzie:T =
A
f
n
√
g
2hn
, k
1
=
1
f
n
√
g
2hn
, k
2
=
2h
n
f
n
Znak ∆ mo»e by¢ pomini¦ty, przy jednoczesnym uwzgl¦dnieniu »e w zale»no±ci (
)
wyst¦puj¡ przyrosty poszczególnych warto±ci.
T
dh (t)
dt
+ h (t) = k
1
Q
1
(t) − k
2
f (t)
(1.34)
Dziaªaj¡c na zale»no±¢ (
) transformat¡ Laplace'a otrzymujemy:
T sh (s) + h (s) = k
1
Q
1
(s) − k
2
f (s) ⇒ h (s) (T s + 1) = k
1
Q
1
(s) − k
2
f (s)
(1.35)
Oznaczaj¡c
v (s) = k
1
Q
1
(s) − k
2
f (s)
(1.36)
Mo»na wyznaczy¢ transmitancj¦ obiektu regulacji:
G
OB
(s) =
h (s)
v (s)
=
1
T s + 1
(1.37)
Przetwornik pomiarowy mo»na opisa¢ jako obiekt bezinercyjny ze wzmocnieniem. Wzmoc-
nienie przetwornika mo»na odczyta¢ z jego charakterystyki (rys.
).
k
PP
=
wy
max
− wy
min
we
max
− we
min
=
16
mA
3
m
= 5.33
mA
m
(1.38)
Jako regulator przyjmijmy regulator typu PI o transmitancji:
G
R
(s) = k
p
1 +
1
T
i
s
(1.39)
Wyj±ciem z regulatora jest sygnaª pr¡dowy o zakresie 4 20 mA, który podawany jest na
ustawnik pozycyjny, który mo»na zamodelowa¢ jako element bezinercyjny o wzmocnieniu
k
f
Wynikowe pole przekroju otwarcia zaworu wynosi¢ wi¦c b¦dzie:
f = k
f
x
(1.40)
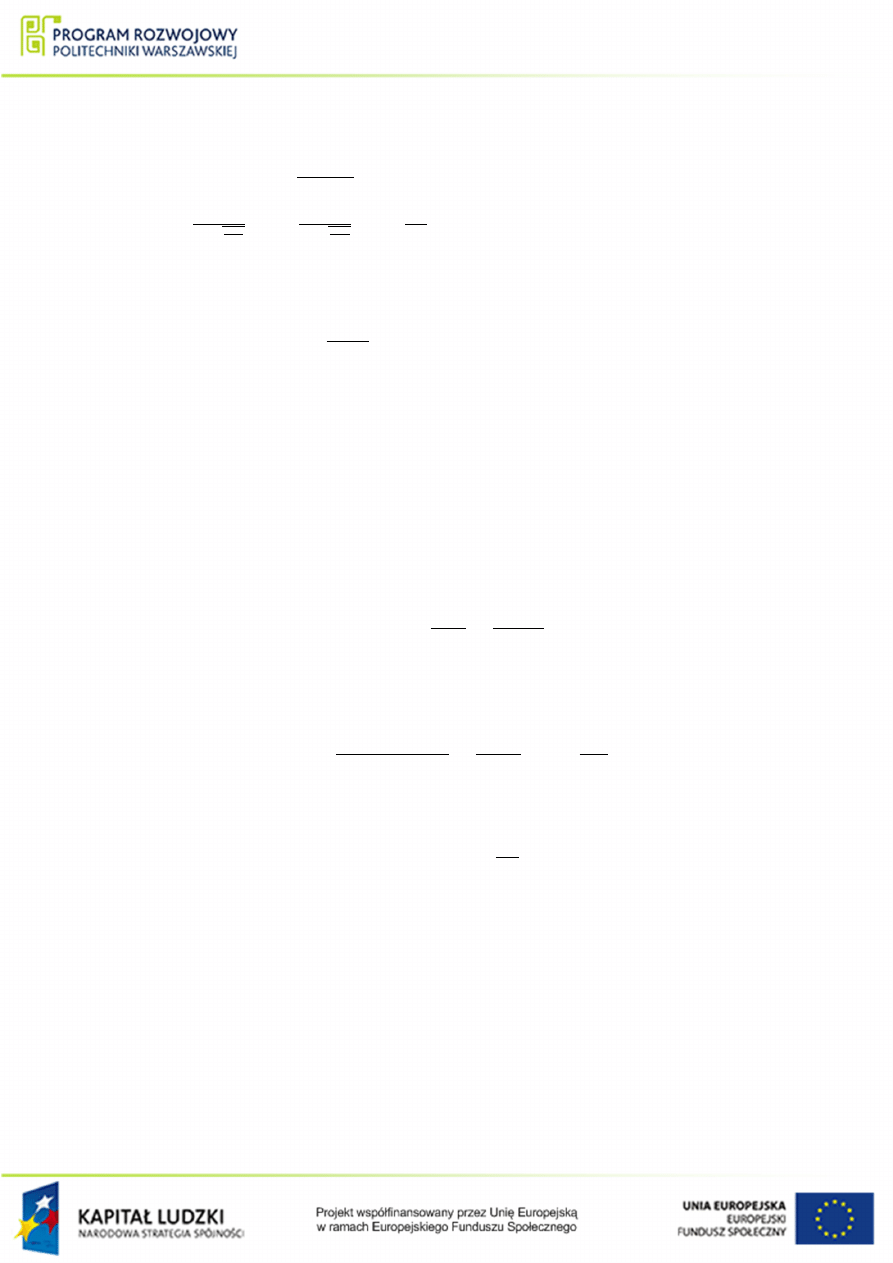
Wykorzystuj¡c zale»no±ci (
) (
) (
) (
) (
) mo»na narysowa¢ schemat
blokowy ukªadu regulacji automatycznej, przedstawionego na rys.
22
Rysunek 1.36 [Tu wpisz Podpis rysunku. Uwaga: (1) Jedynie dla rysunków
osadzonych w rozdziaªach. W pozostaªych dokumentach element ten mo»na usun¡¢
zostanie on zignorowany.]
gdzie: 1 graczna reprezentacja zale»no±ci (
), 2 graczna reprezentacja zale»no±ci
) , 3 graczna reprezentacja zale»no±ci (
), 4 graczna reprezentacja zale»no±ci
), 5 - graczna reprezentacja zale»no±ci (
).
Transmitancja zast¦pcza ukªadu wynosi zatem:
G (s) =
h (s)
Q
1
(s)
= k
1
1
T s+1
1 +
1
T s+1
k
PP
k
f
k
2
k
p
T
i
s+1
T
i
s
=
k
1
T
i
s
(T s + 1) T
i
s + k
PP
k
f
k
2
k
p
(T
i
s + 1)
(1.41)
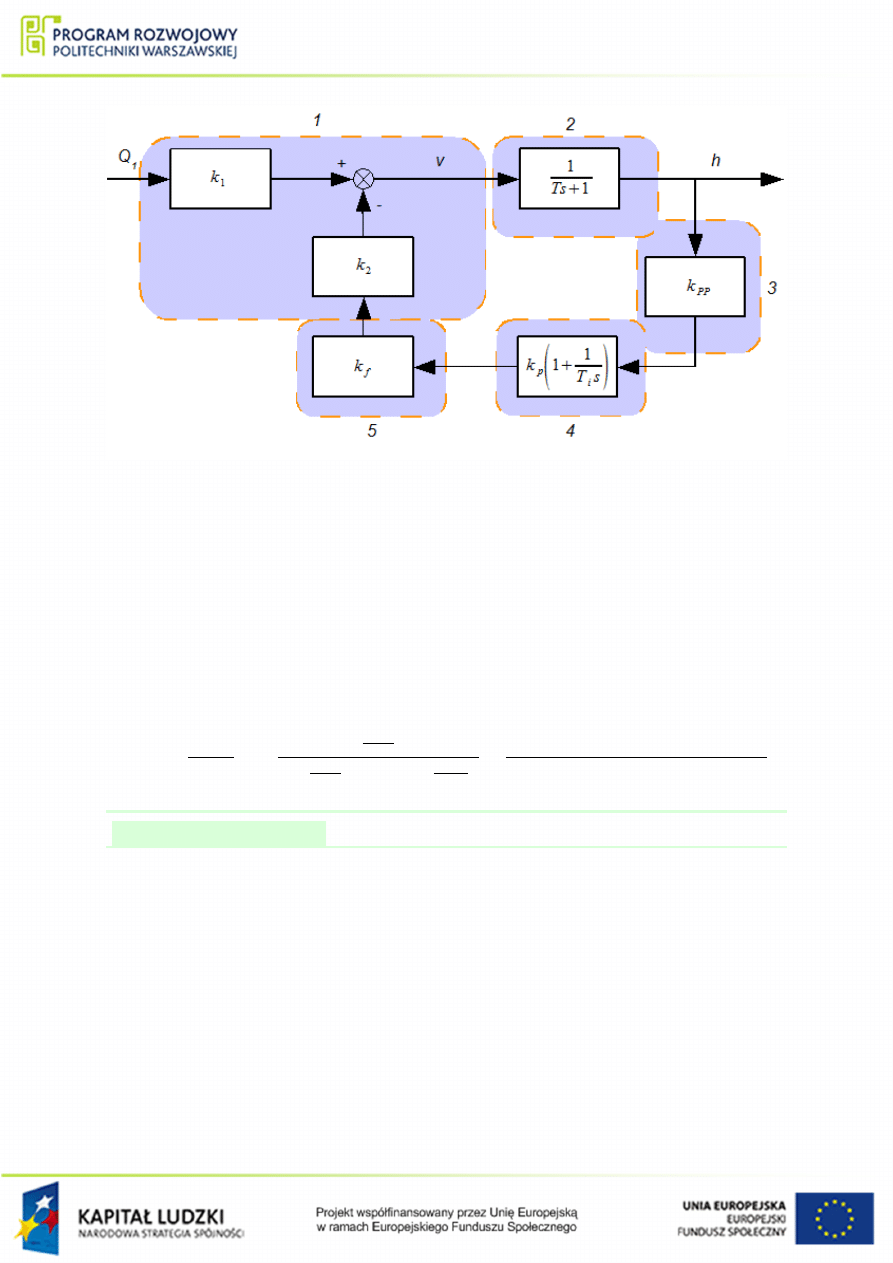
Przykªad 1.20
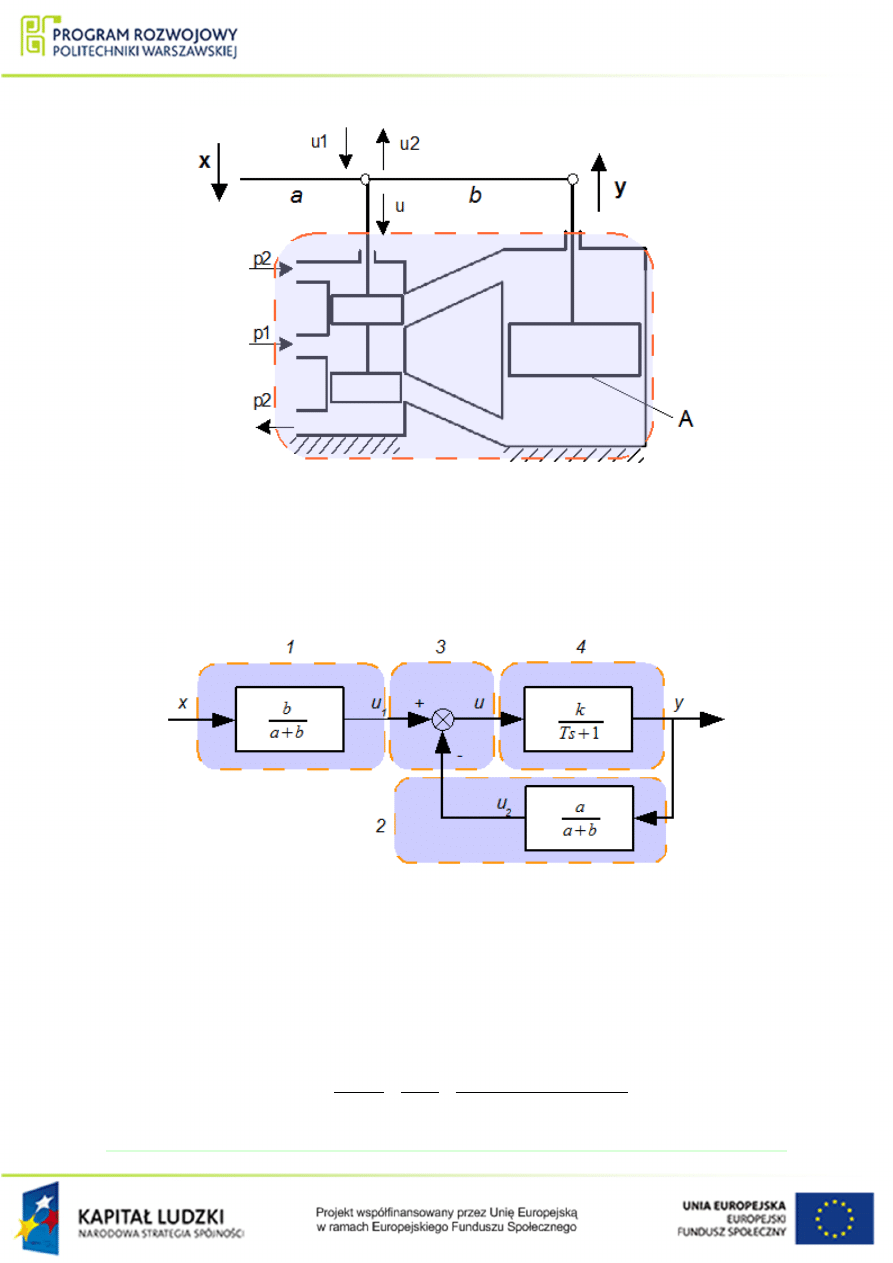
Narysowa¢ schemat blokowy oraz wyznaczy¢ transmitancj¦ ukªadu mechanicznego przed-
stawionego na rys.
. Wymuszeniem jest przesuni¦cie x, natomiast wyj±ciem przesu-
ni¦cie y. Ci±nienia p
1
, p
2
s¡ staªe.
23
Rysunek 1.37 Schemat ukªadu mechanicznego do przykªadu
.
Zauwa»my »e przesuni¦cie u mo»na zapisa¢ jako sum¦ przesuni¦¢ u
1
oraz u
2
:
u = u
1
− u
2
(1.42)
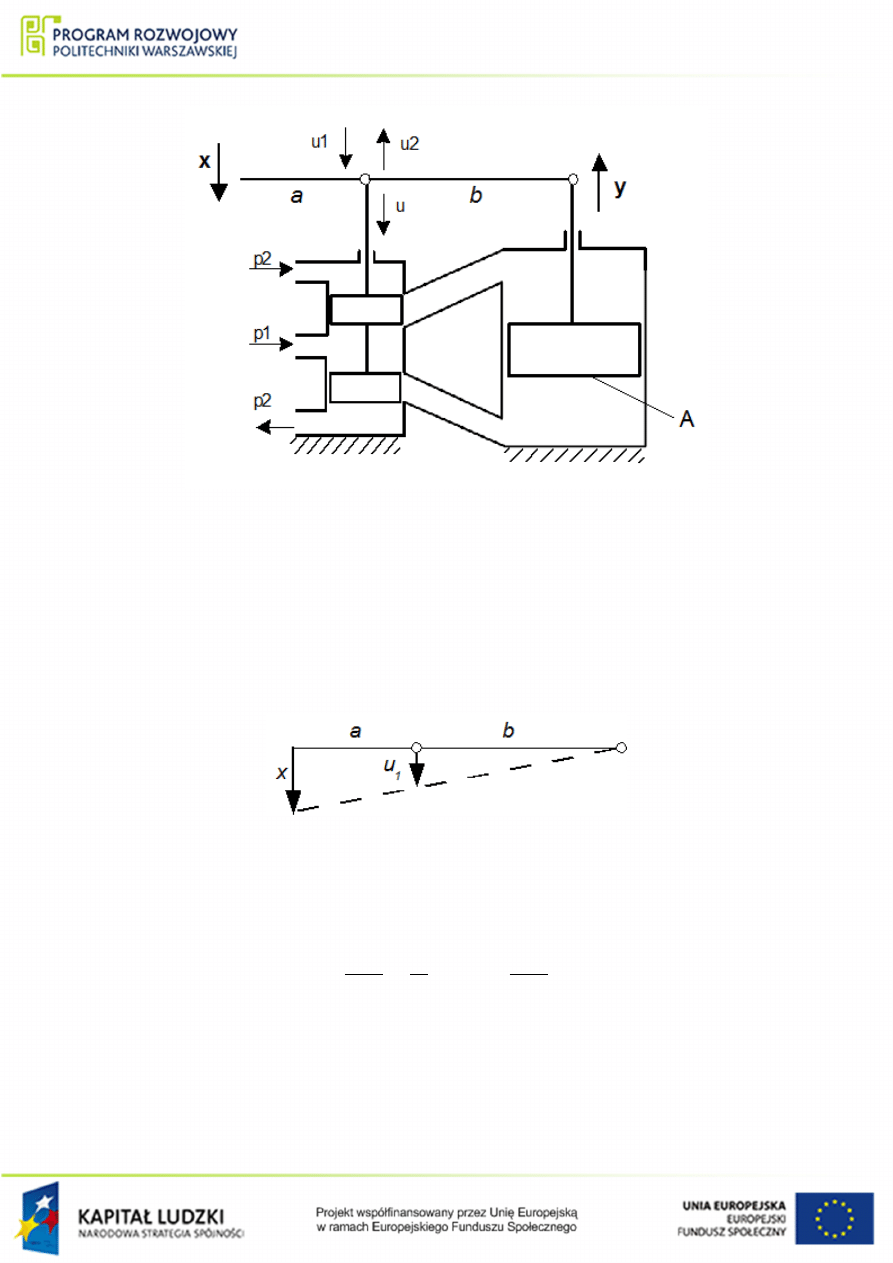
Przesuni¦cie u
1
mo»na wyznaczy¢, unieruchamiaj¡c punkt d¹wigni dla przesuni¦cia y:
Rysunek 1.38 Sposób wyznaczenia przesuni¦cia u
1
:
atwo mo»na zauwa»y¢ (rys.
), »e:
x
a + b
=
u
1
b
⇒ u
1
= x
b
a + b
(1.43)
Podobnie, u
2
mo»na wyznaczy¢, unieruchamiaj¡c punkt d¹wigni dla przesuni¦cia x:
24
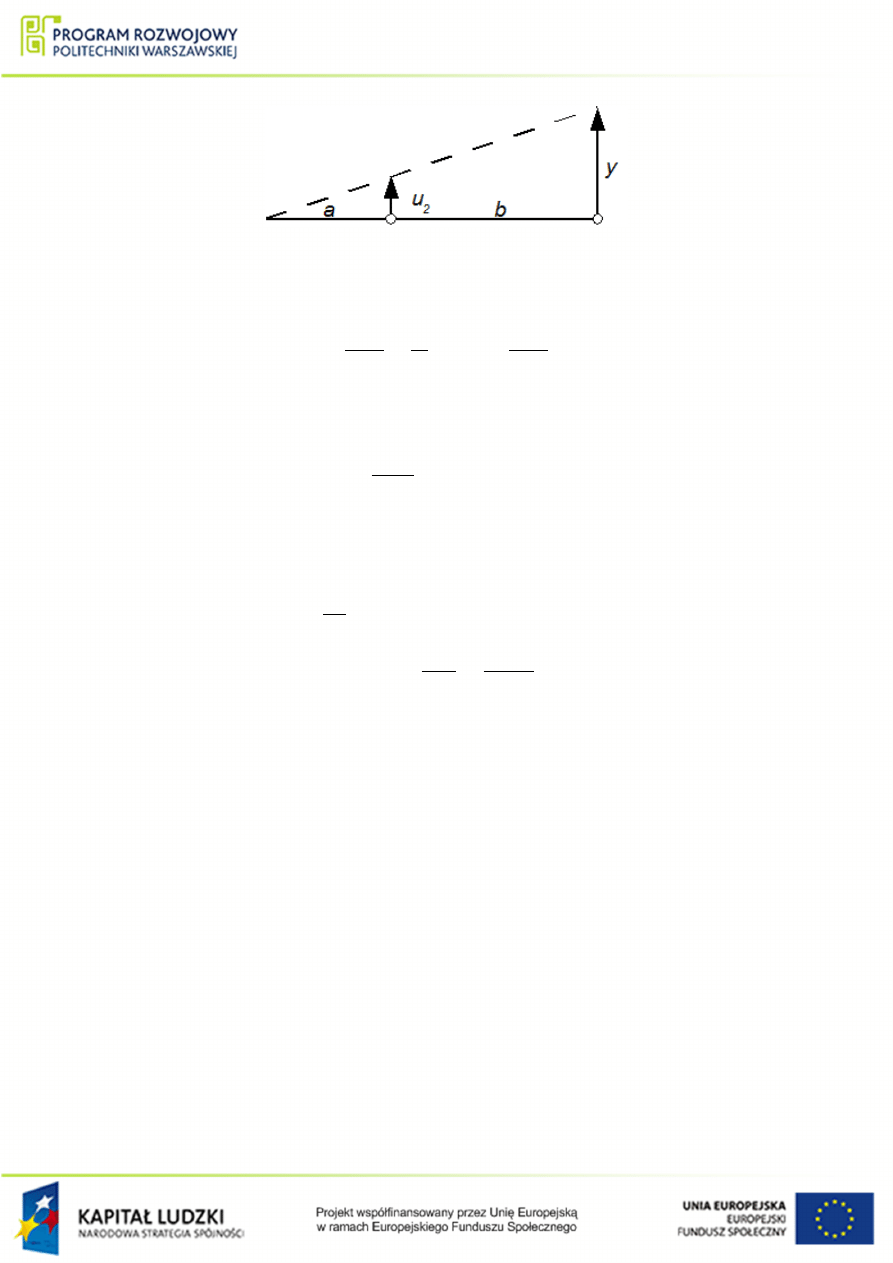
Rysunek 1.39 Sposób wyznaczenia przesuni¦cia u
2
:
y
a + b
=
u
2
a
⇒ u
2
= y
a
a + b
(1.44)
Nast¦pnie, zauwa»my, »e dla staªych ci±nie« p
1
, p
2
, element zaznaczony na rys.
mo»na
opisa¢ nast¦puj¡ca zale»no±ci¡:
T
dy (t)
dt
+ y (t) = ku (t)
(1.45)
Dziaªaj¡c na zale»no±¢ (
) transformat¡ Laplace'a otrzymujemy:
T sy (s) + y (s) = ku (s) ⇒ y (s) (Ts + 1) = ku (s)
(1.46)
St¡d transmitancja G (s) =
y(s)
u(s)
wynosi:
G (s) =
y (s)
u (s)
=
k
Ts + 1
(1.47)
Gdzie dla staªych ci±nie« p
1
, p
2
, T, k˜ (p
1
, p
2,
A)
25
Rysunek 1.40 Wyznaczanie transmitancji zast¦pczej ukªadu elementów dla
przykªadu
.
Schemat blokowy ukªadu elementów z rys.
mo»na wi¦c przedstawi¢ nast¦puj¡co:
Rysunek 1.41 Schemat blokowy elementów z rys.
.
gdzie: 1 graczna reprezentacja zale»no±ci (
), 2 graczna reprezentacja zale»no±ci
) , 3 graczna reprezentacja zale»no±ci (
), 4 graczna reprezentacja zale»no±ci
).
Transmitancja zast¦pcza ukªadu przedstawionego na rys.
wynosi:
G
z
(s) =
k
Ts + 1
·
b
a + b
·
(Ts + 1) (a + b) + u · a
(Ts + 1) (a + b)
(1.48)
Oznaczenia j.w.
26
1.2.2 Zadania do samodzielnego rozwi¡zania
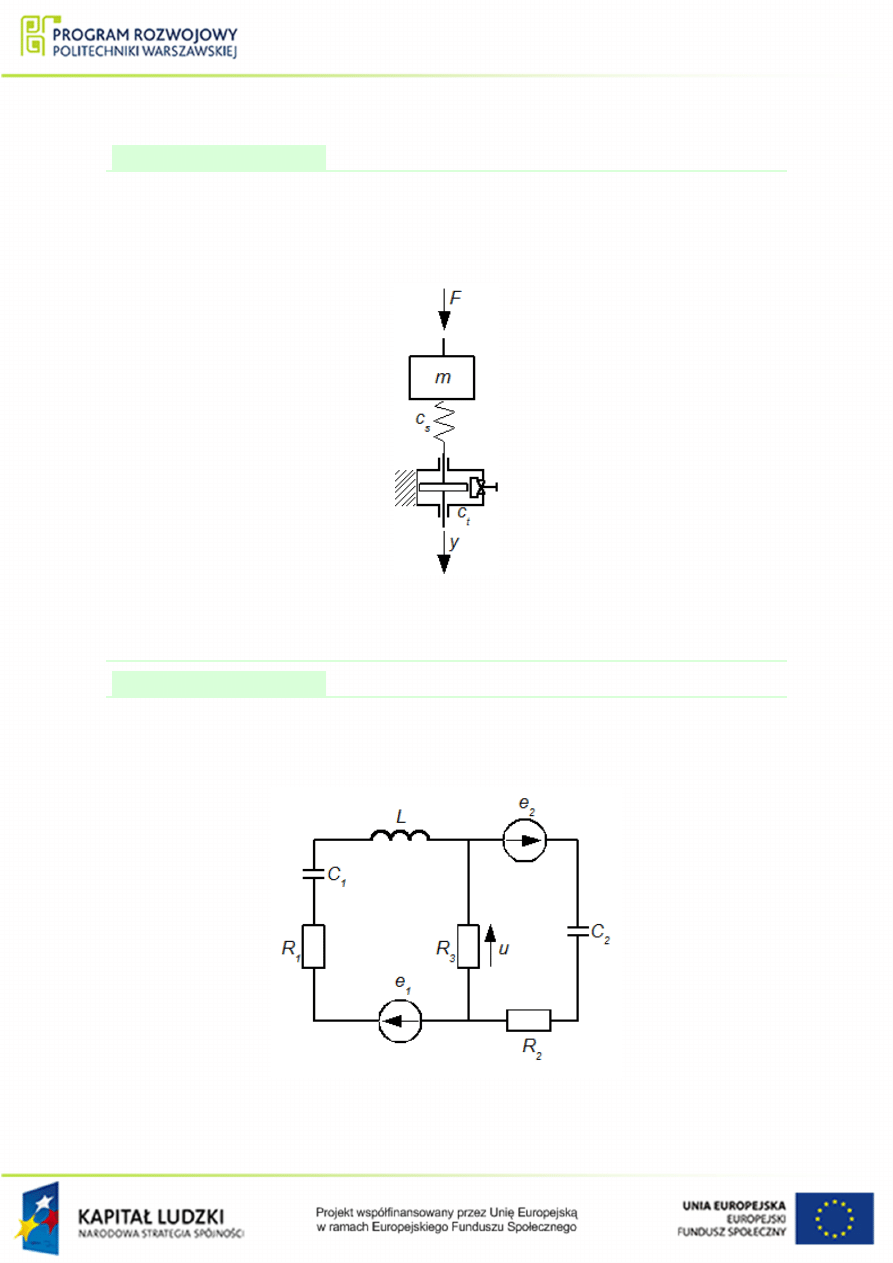
Przykªad 1.21
Narysowa¢ schemat blokowy oraz wyznaczy¢ transmitancj¦ ukªadu mechanicznego przed-
stawionego na rys.
. Wymuszeniem jest siªa F, natomiast wyj±ciem przesuni¦cie y.
Mas¦ elementów oznaczono jako m, staª¡ spr¦»ysto±ci spr¦»yny jako c
s
, natomiast wspóª-
czynnik tªumienia jako c
t
.
Rysunek 1.42 Schemat mechaniczny do przykªadu
.
Przykªad 1.22
Narysowa¢ schemat blokowy ukªadu elektrycznego przedstawionego na rys.
. Wymu-
szeniami s¡ napi¦cia ¹ródªowe e
1
oraz e
2
, natomiast wyj±ciem napi¦cie u na rezystancji
R
3
.
Rysunek 1.43 Schemat elektryczny do przykªadu
.
27
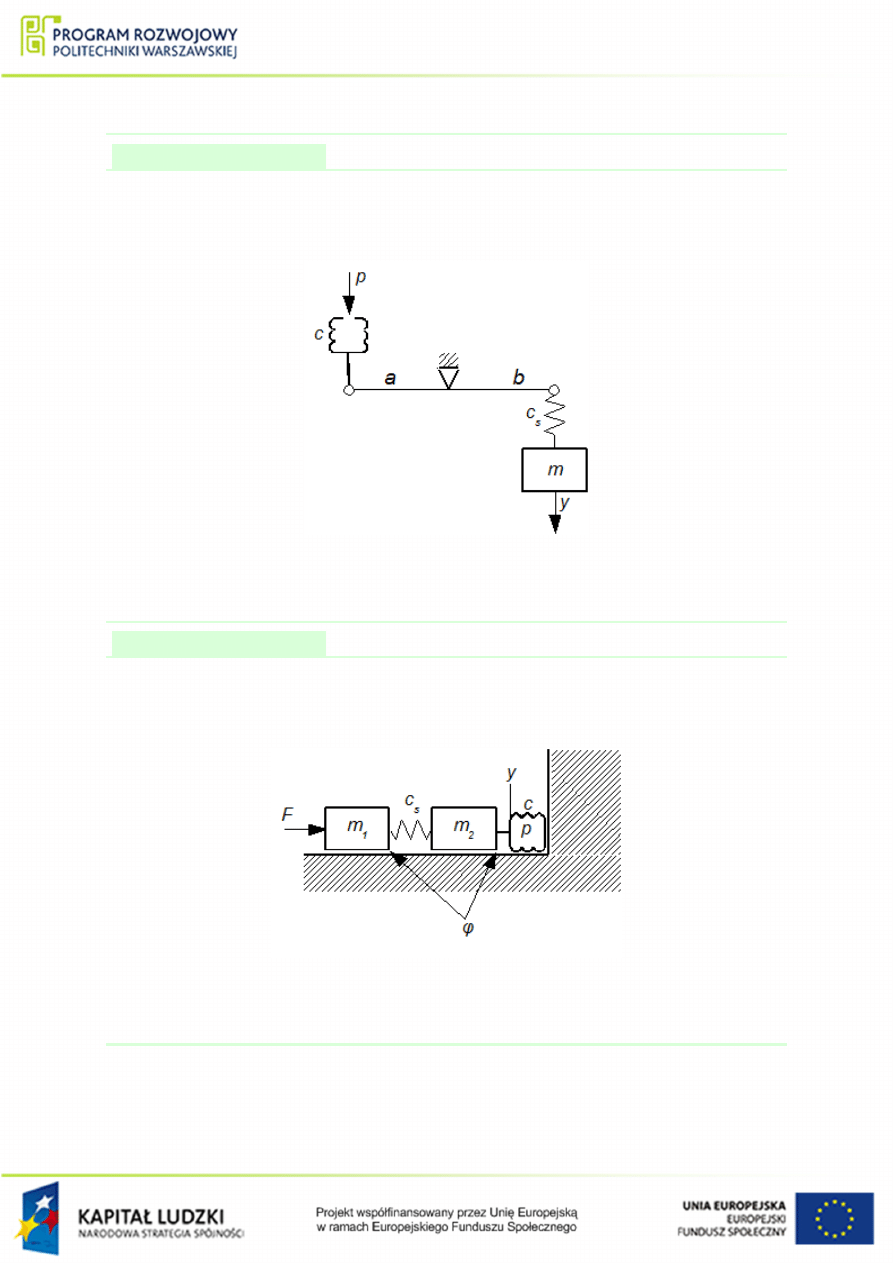
Przykªad 1.23
Narysowa¢ schemat blokowy oraz wyznaczy¢ transmitancj¦ ukªadu mechanicznego przed-
stawionego na rys.
. Wymuszeniem jest ci±nienie p, natomiast wyj±ciem przesuni¦cie
y.
Rysunek 1.44 Schemat mechaniczny do przykªadu
.
Przykªad 1.24
Narysowa¢ schemat blokowy oraz wyznaczy¢ transmitancj¦ ukªadu mechanicznego przed-
stawionego na rys.
. Wymuszeniem jest siªa F, natomiast wyj±ciem przesuni¦cie
y.
Rysunek 1.45 Schemat mechaniczny do przykªadu
.
28
Przykªad 1.25
Narysowa¢ schemat blokowy oraz wyznaczy¢ transmitancj¦ ukªadu przedstawionego na
. Wymuszeniem jest nat¦»enie przepªywu Q
1
, natomiast wyj±ciem poziom cieczy
h
2
.
Rysunek 1.46 Schemat ukªadu elementów do przykªadu
.
Przykªad 1.26
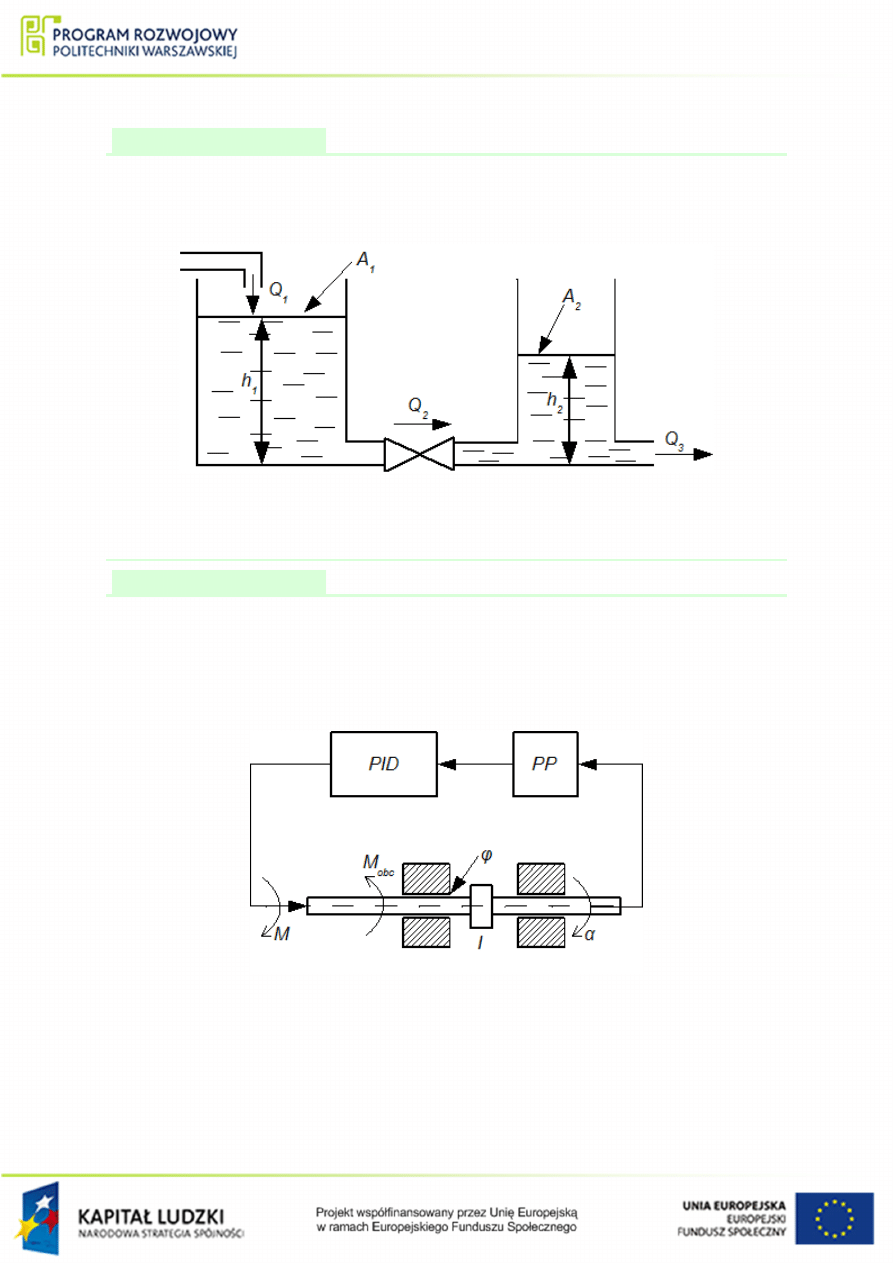
Narysowa¢ schemat blokowy oraz wyznaczy¢ transmitancj¦ ukªadu regulacji przedsta-
wionego na rys.
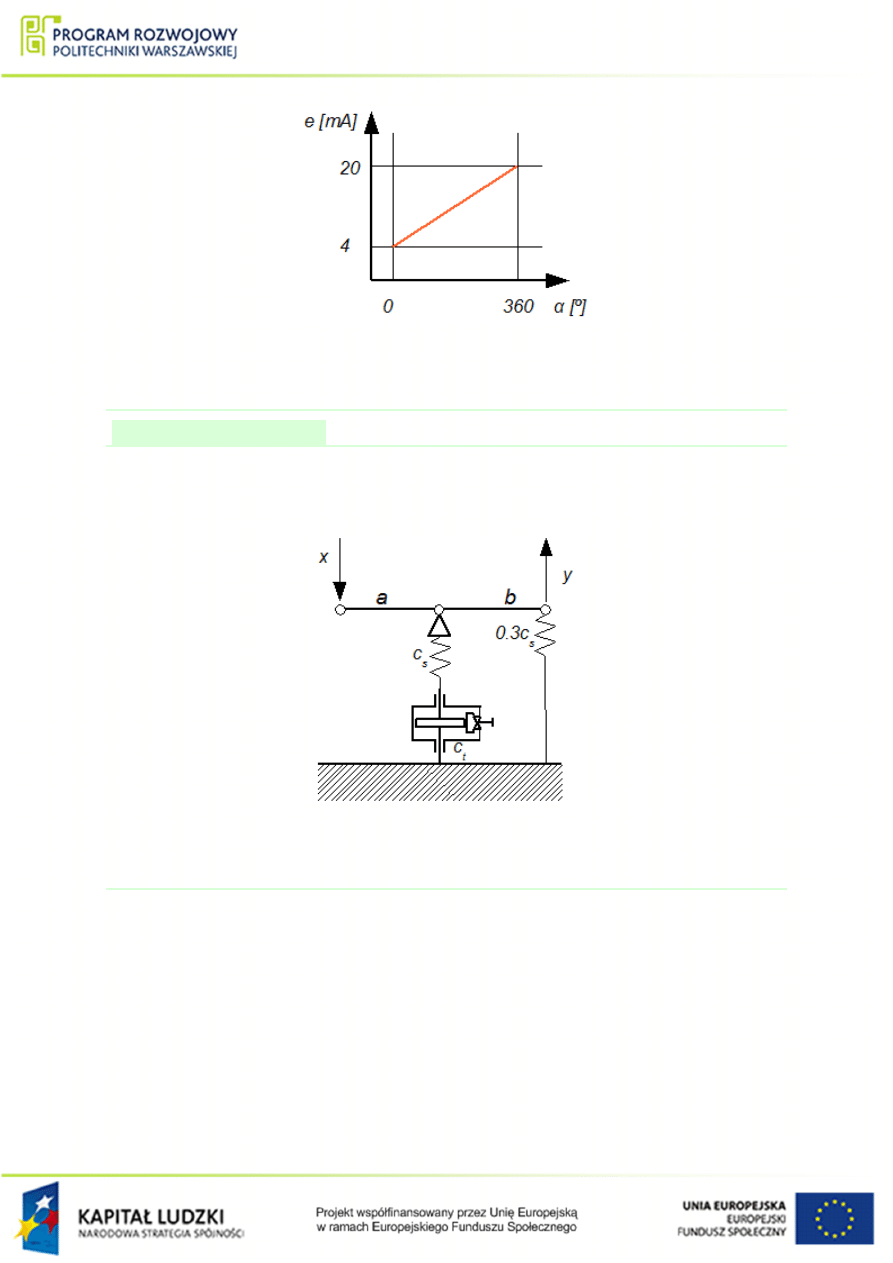
. Wyj±ciem ukªadu jest k¡t obrotu waªu α. Regulator PID dziaªa
(poprzez pomini¦ty element wykonawczy) na waª momentem obrotowym M. Na ukªad
dziaªaj¡ zakªócenia pod postaci¡ momentu obci¡»enia M
obc
. Charakterystyka przetwor-
nika pomiarowego (PP) zostaªa przedstawiona na rys.
.
Rysunek 1.47 Schemat ukªadu regulacji do przykªadu
.
29
Rysunek 1.48 Charakterystyka przetwornika pomiarowego do przykªadu
.
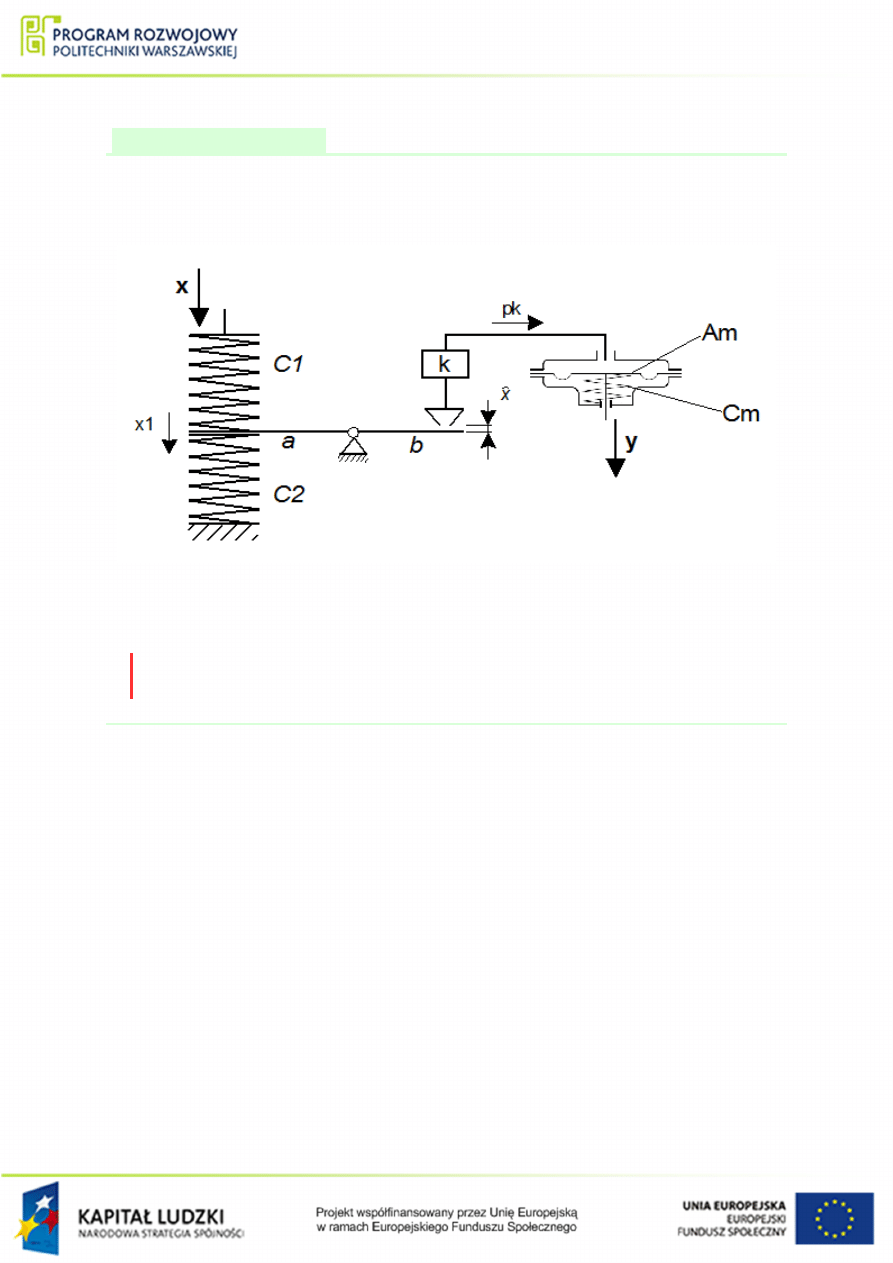
Przykªad 1.27
Narysowa¢ achemat blokowy, oraz wyznaczy¢ transmitancj¦ zast¦pcza ukªadu elementów
przedstawionych na rys.
. Wymuszeniem jest przesuni¦cie x, natomiast wyj±ciem
przesuni¦cie y.
Rysunek 1.49 Schemat ukªadu do przykªadu
.
30
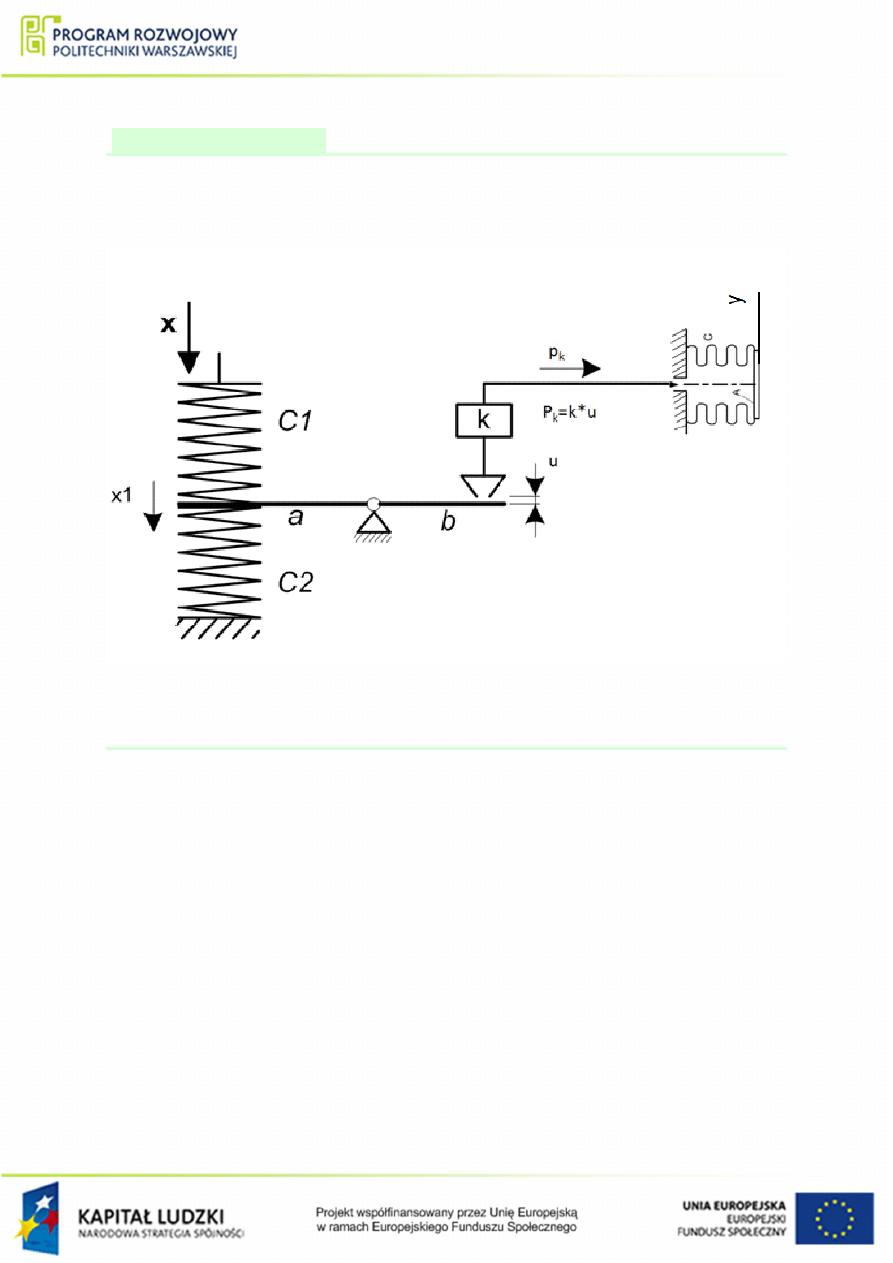
Przykªad 1.28
Narysowa¢ achemat blokowy, oraz wyznaczy¢ transmitancj¦ zast¦pcza ukªadu elemen-
tów przedstawionych na rys.
. Wymuszeniem jest przesuni¦cie x, natomiast wyj±ciem
przesuni¦cie y.
Rysunek 1.50 Schemat ukªadu do przykªadu
.
Wskazówka: Ci±nienie p
k
= k
ˆ
x
31
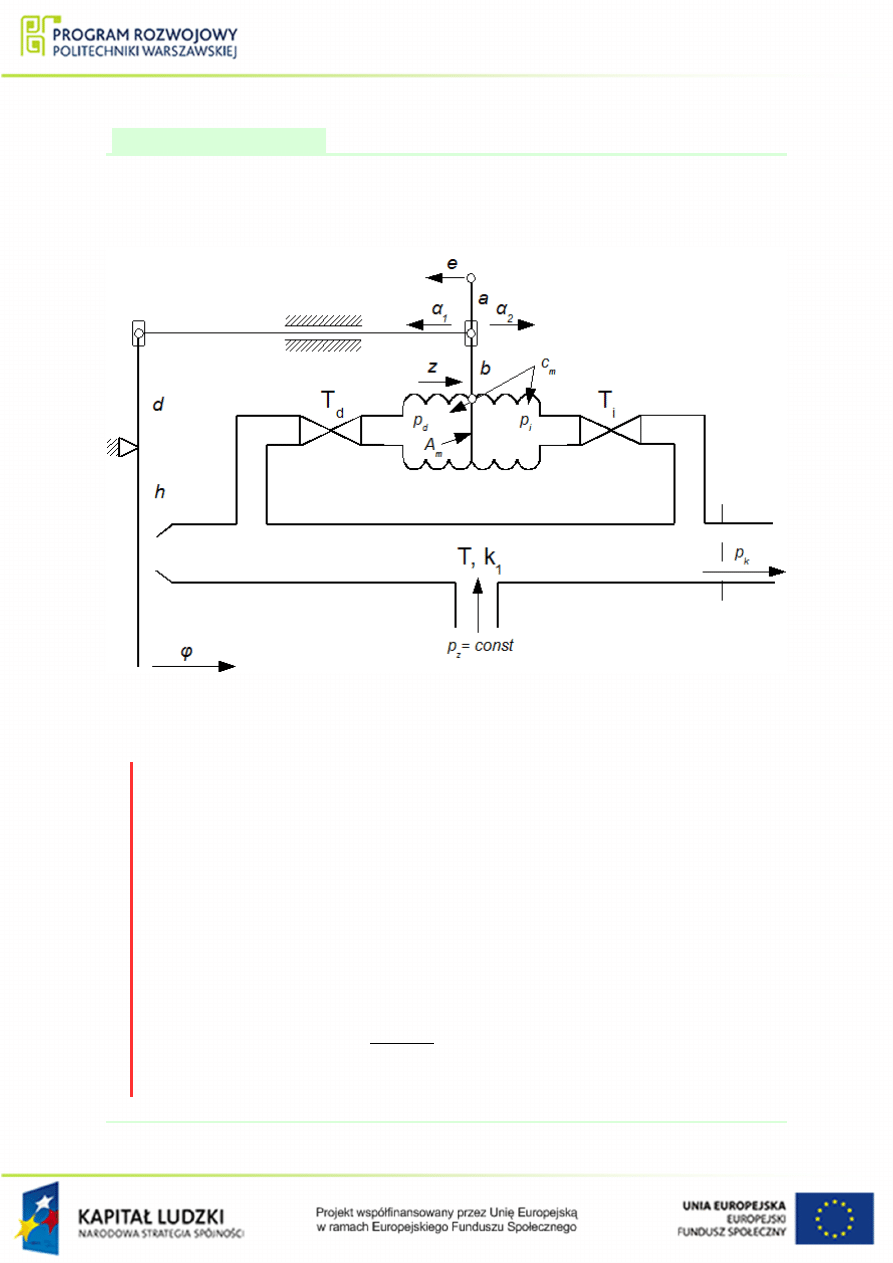
Przykªad 1.29
Narysowa¢ schemat blokowy oraz wyznaczy¢ transmitancj¦ pneumatycznego regulatora
PID, przedstawionego na rys.
. Wymuszeniem jest odchyªka regulacji e, wyj±ciem
ci±nienie p
k
.
Rysunek 1.51 Schemat pneumatycznego regulatora PID, do przykªadu
.
Wskazówka: W przedstawionym regulatorze wyró»ni¢ mo»na nast¦puj¡ce podze-
spoªy:
•
kaskada steruj¡ca o staªej czasowej T i wspóªczynniku wzmocnienia k
1
•
dwie kaskady elastyczne zamkni¦te o staªych czasowych T
d
oraz T
i
•
ukªad d¹wigni o ramionach a, b, d, h
Równianie kaskady steruj¡cej ma posta¢:
T
d∆p
k
(t)
dt
+ ∆p
k
(t) = k
1
φ (t)
(1.49)
32
Przykªad 1.30
Narysowa¢ achemat blokowy, oraz wyznaczy¢ transmitancj¦ zast¦pcza ukªadu elementów
przedstawionych na rys.
. Wymuszeniem jest przesuni¦cie x, natomiast wyj±ciem
przesuni¦cie y.
Rysunek 1.52 Schemat ukªadu do przykªadu
.
33
Document Outline
Wyszukiwarka
Podobne podstrony:
Przekształcenia schematów blokowych
Przekształcenia schematów blokowych
Przekształcanie schematów blokowych
Przekształcanie schematów blokowych
5 Algorytmy i schematy blokowe
3 Projektowanie układów automatyki (schematy blokowe, charakterystyki)
10 schematy blokowe i grafy (jako zobrazowanie modeli matematycznych)
Schemat blokowy For 1
Schemat blokowy Do While 2
SCHEMAT BLOKOWY
SCHEMAT BLOKOWY RADARU
Algebra schematów blokowych c d
Schemat blokowy If 1
Schemat blokowy For 3
SCHEMATY BLOKOWE ODBIORNIKÓW
06-10, schematy-blokowe
Schemat blokowy While 3
więcej podobnych podstron