
Przekształcanie schematów
blokowych
Schematy blokowe
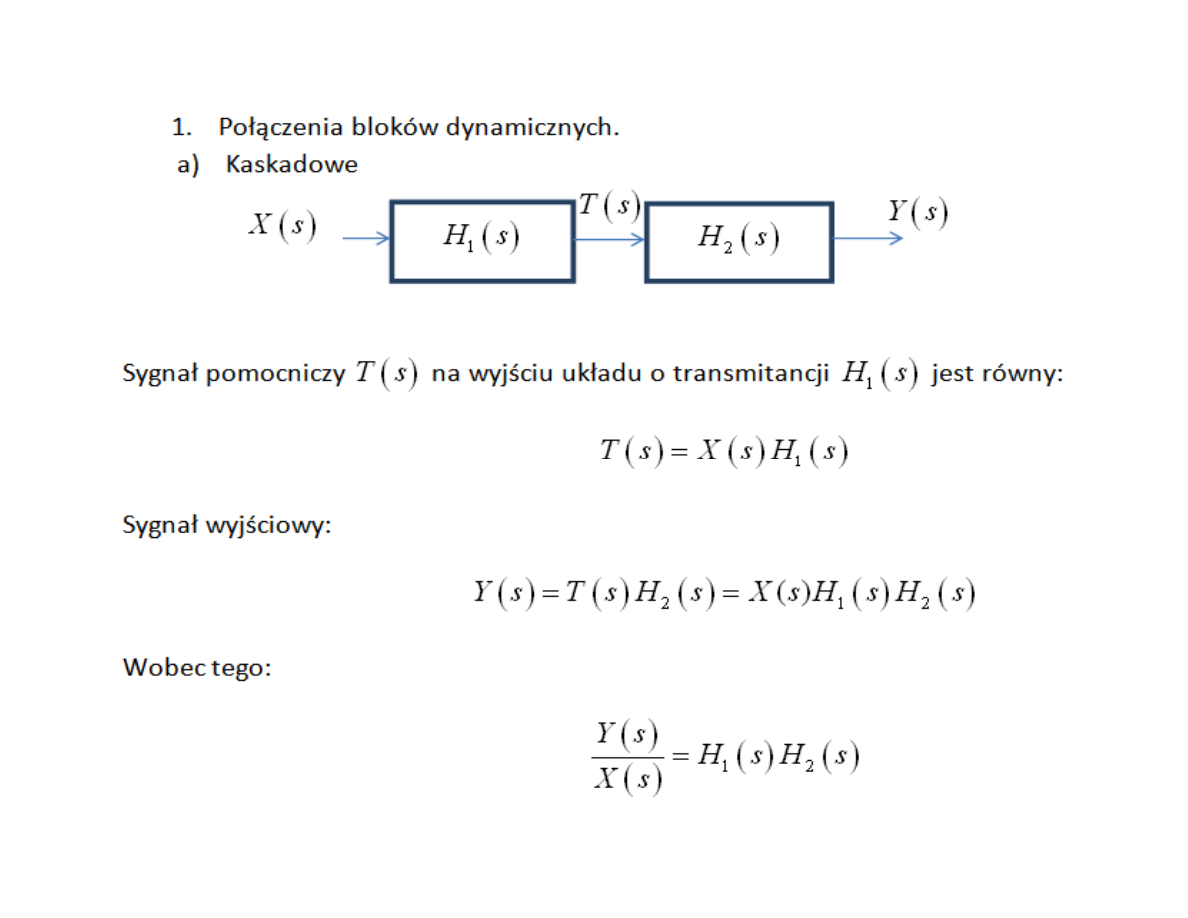
• Układy automatyki mogą być zbudowane z wielu
bloków dynamicznych o określonych transmitancjach,
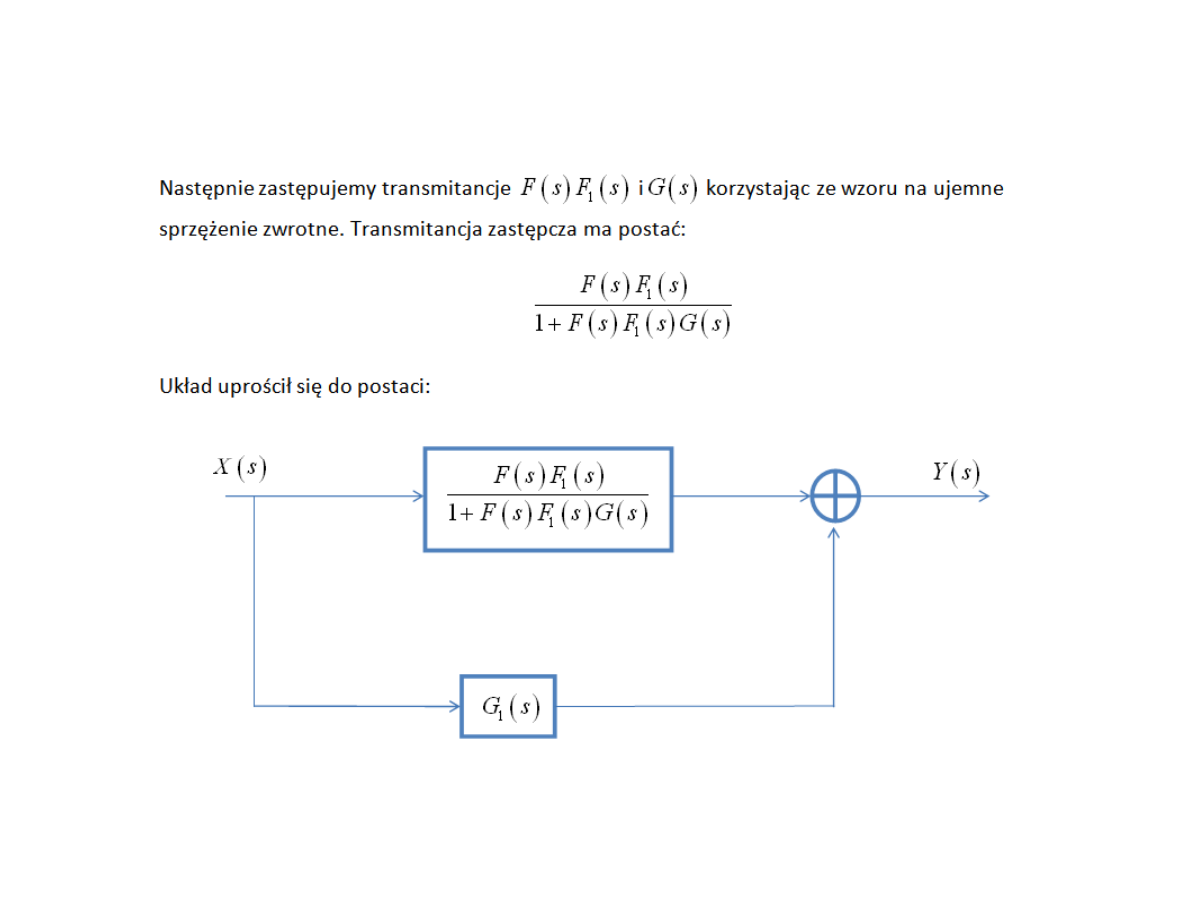
połączonych ze sobą układami sumującymi
(sumatorami), węzłami informacyjnymi. Bardzo często
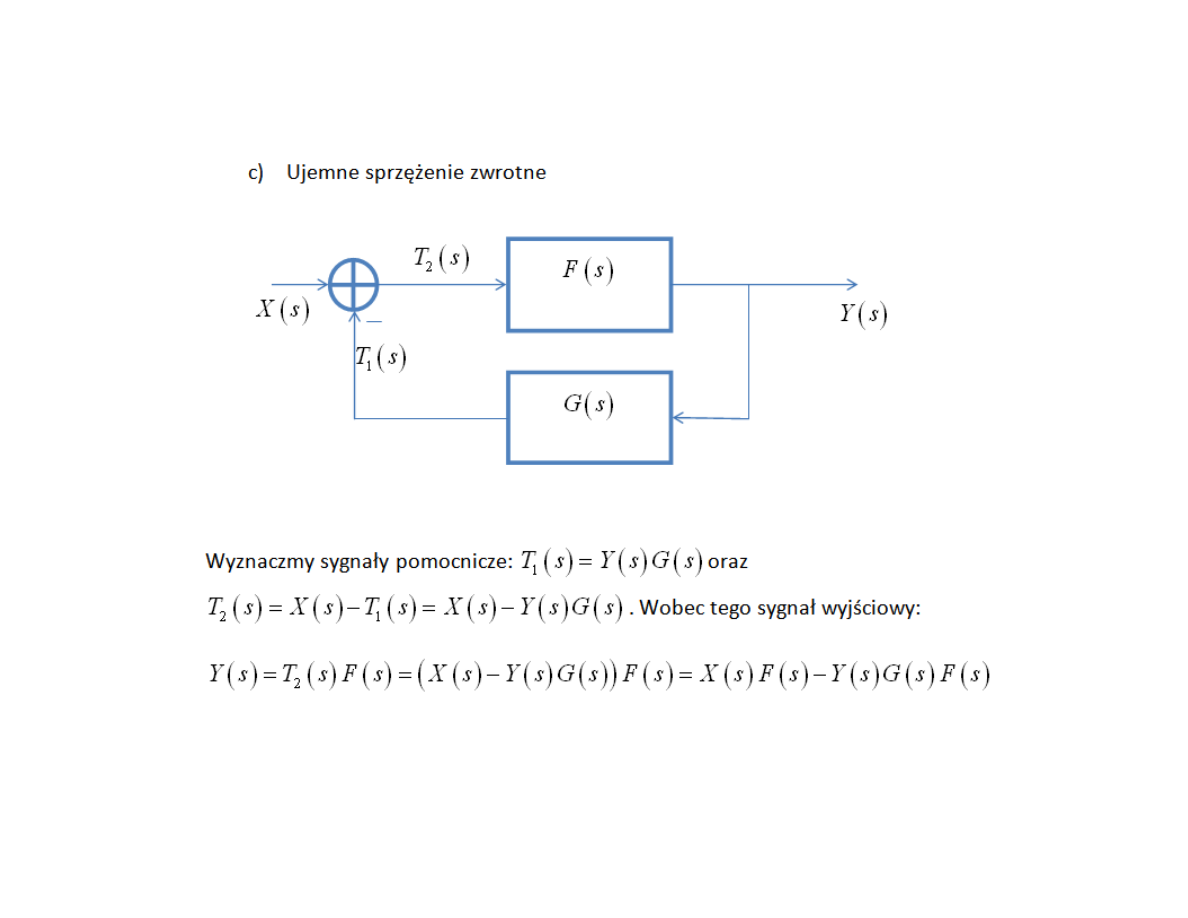
w układach automatyki stosuje się sprzężenie zwrotne.
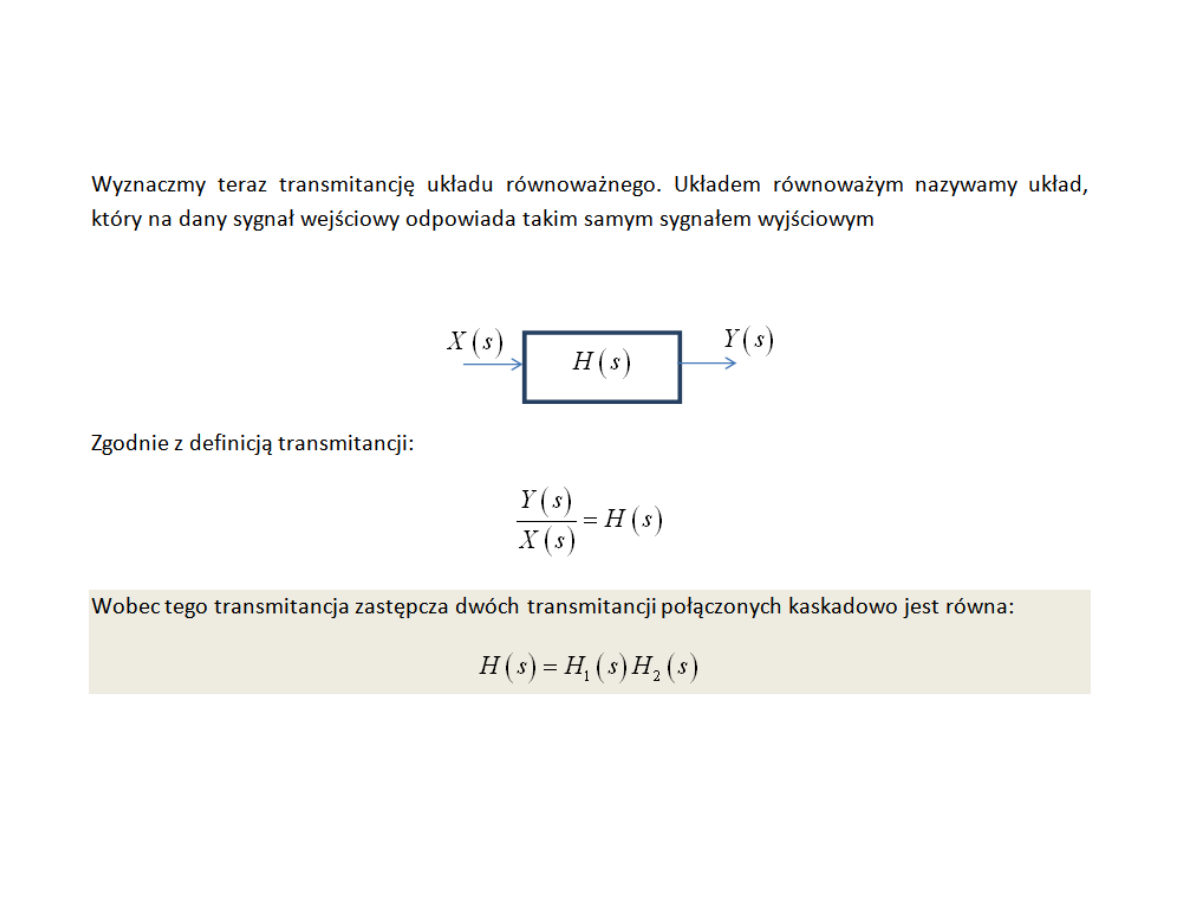
Za pomocą opisanych w rozdziale metod, da się nawet
Za pomocą opisanych w rozdziale metod, da się nawet
bardzo skomplikowany układ uprościć i przedstawić za
pomocą jednego bloku o pewnej transmitancji.
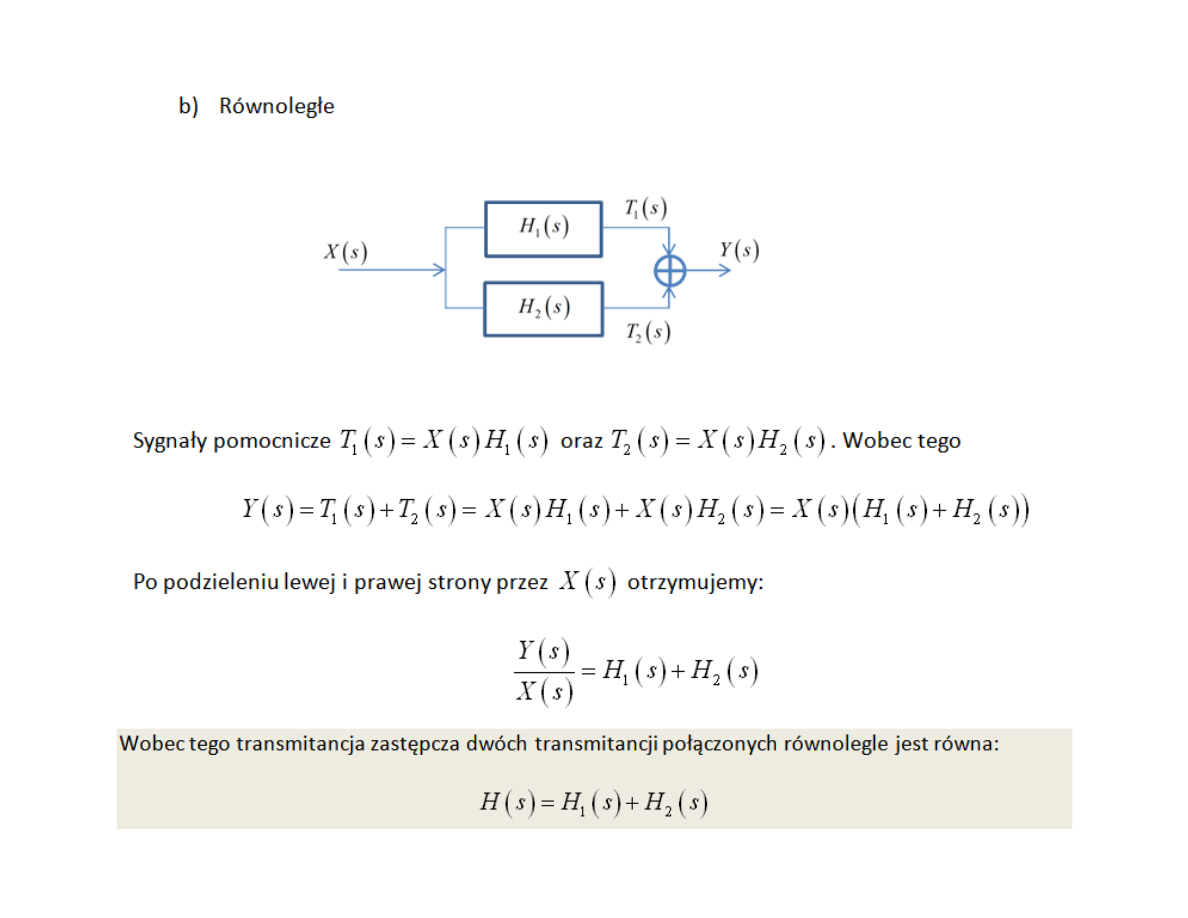
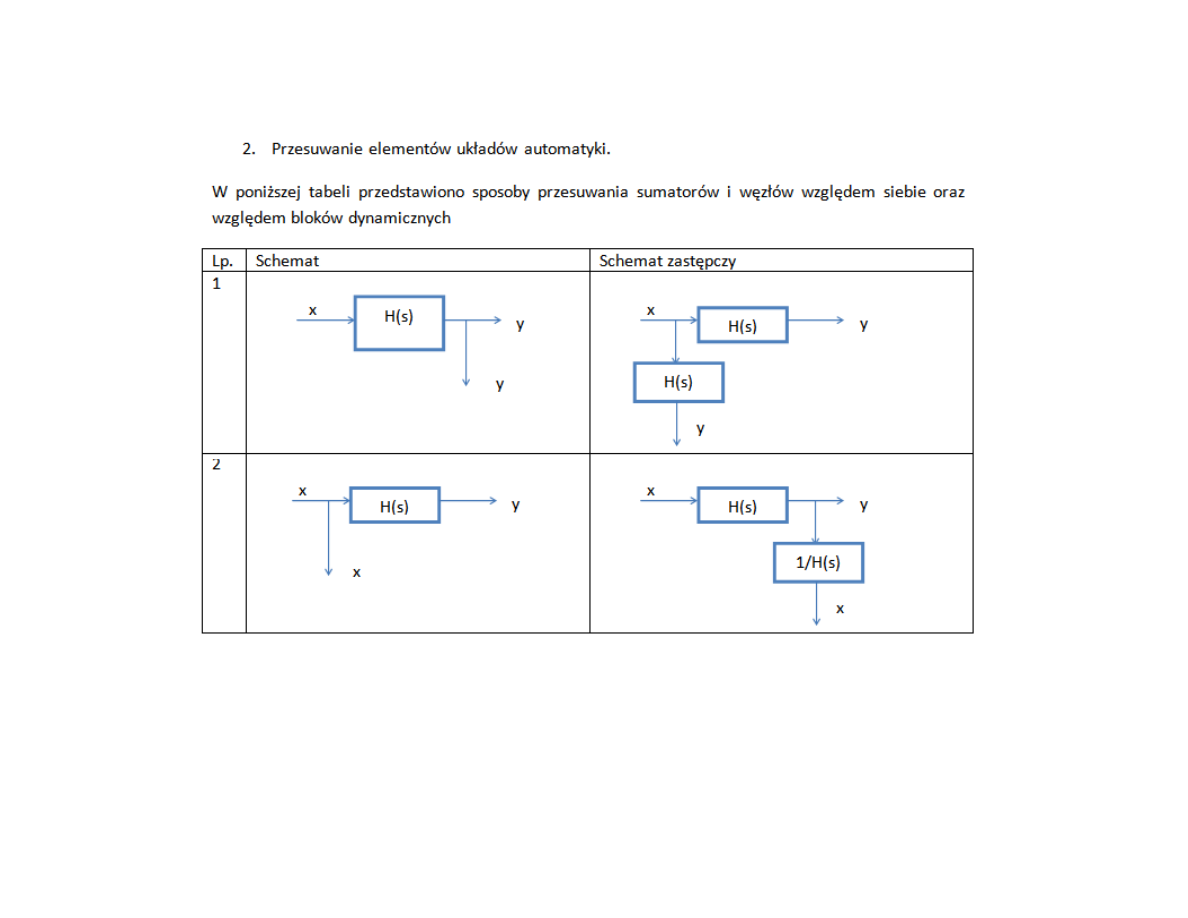
• Układ sumujący (sumator) będziemy oznaczać
symbolem , zaś węzeł informacyjny będzie oznaczany
po prostu jako połączenie dwóch lub więcej linii
sygnałowych.

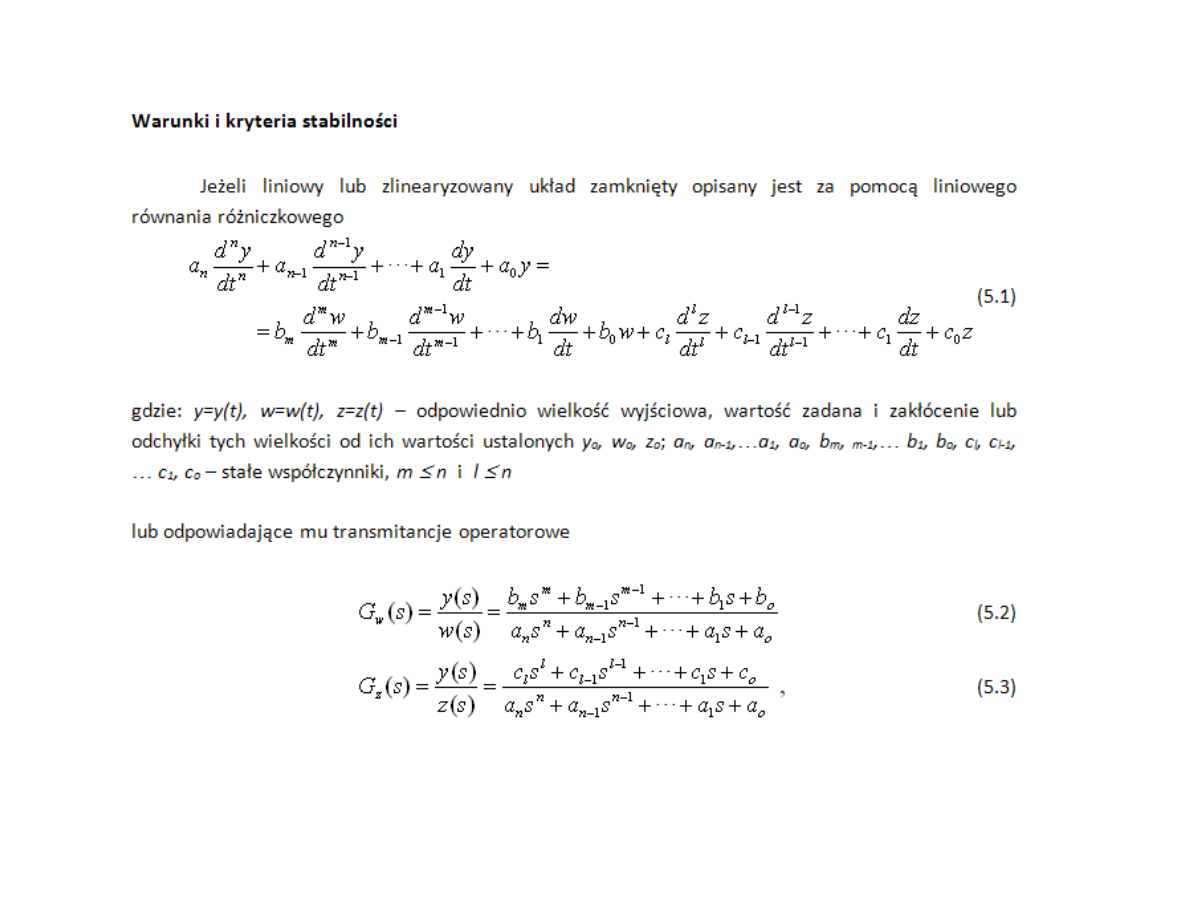
Kryteria stabilności
Stabilność
• Stabilność jest cechą układu, polegającą na przywracaniu go
do stanu równowagi stałej po ustaniu działania zakłócenia,
które wytrąciło układ z tego stanu. Stabilność można ocenić,
badając ruch swobodny układu, tzn. jego zachowanie pod
wpływem warunków początkowych.
wpływem warunków początkowych.

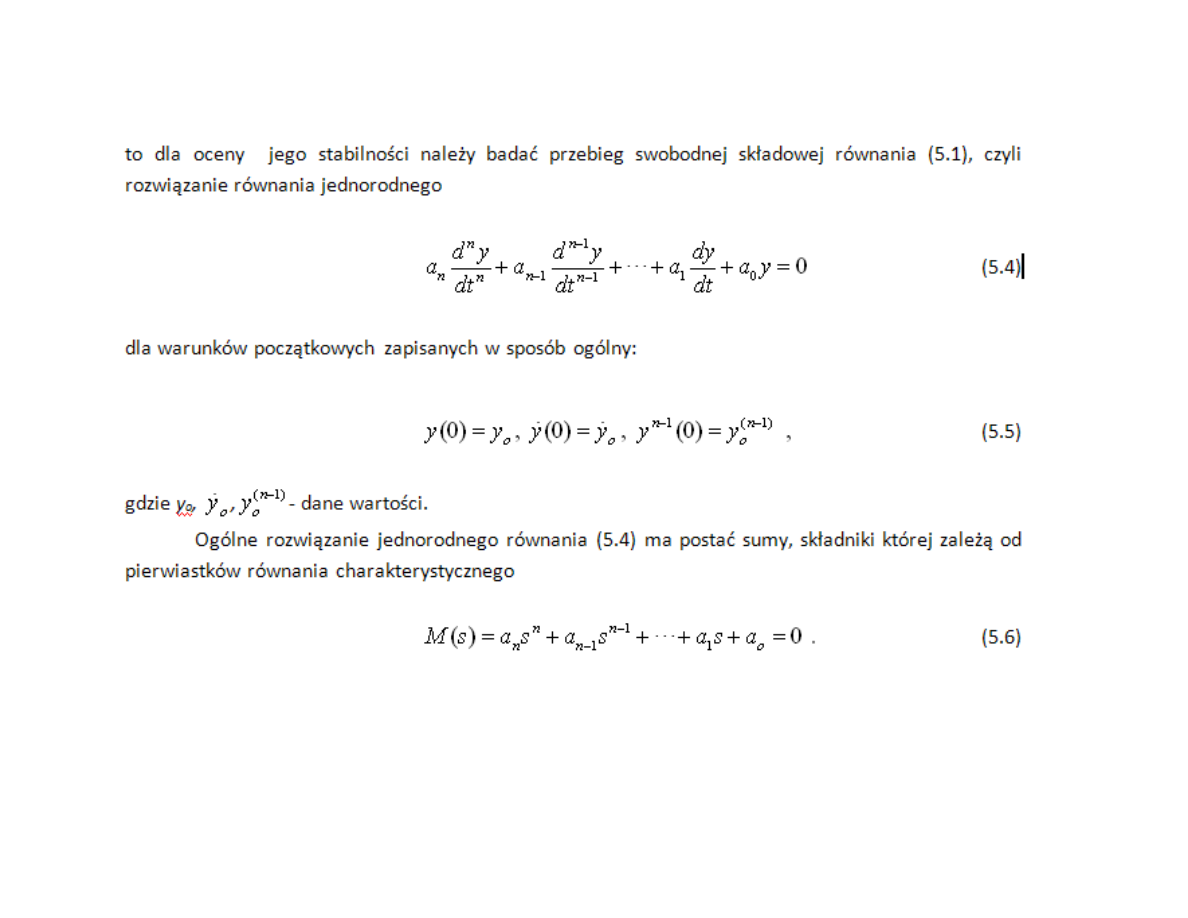
• Układ liniowy nazywamy stabilnym asymptotycznie, jeżeli
składowa przejściowa odpowiedzi y(t) zanika do zera przy i
niezerowych warunkach początkowych.
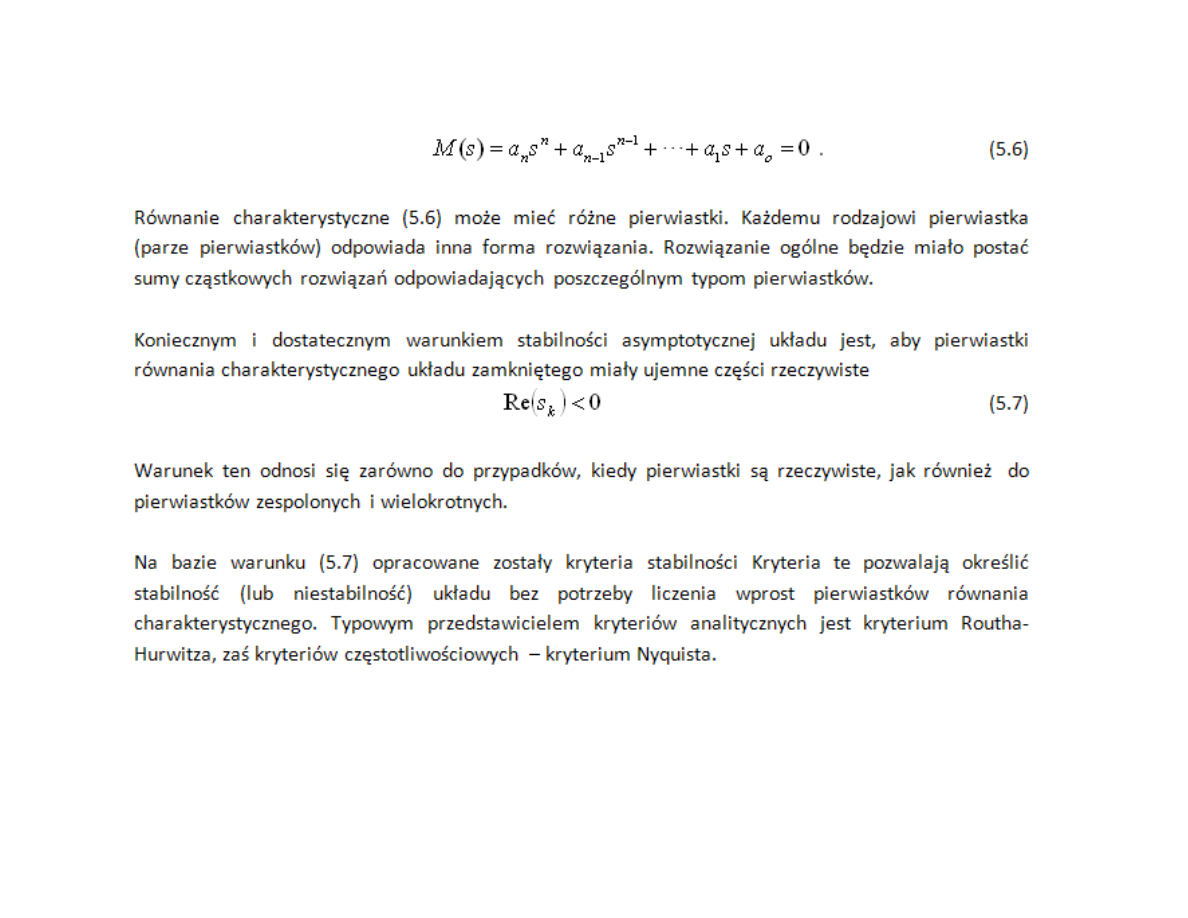
• Bywa, że składowa przejściowa dążyć będzie do skończonej
wartości ustalonej dla czasu t dążącego do nieskończoności
lub oscyluje z amplitudą dążącą do skończonej wartości. Taki
układ nazywamy stabilnym w sensie zwykłym.
• Może
się
zdarzyć,
że
składowa
przejściowa
wielkości
• Może
się
zdarzyć,
że
składowa
przejściowa
wielkości
wyjściowej
narasta w sposób nieograniczony lub zaczyna
oscylować z narastającą do nieskończoności amplitudą. Taki
układ nazywamy niestabilnym.
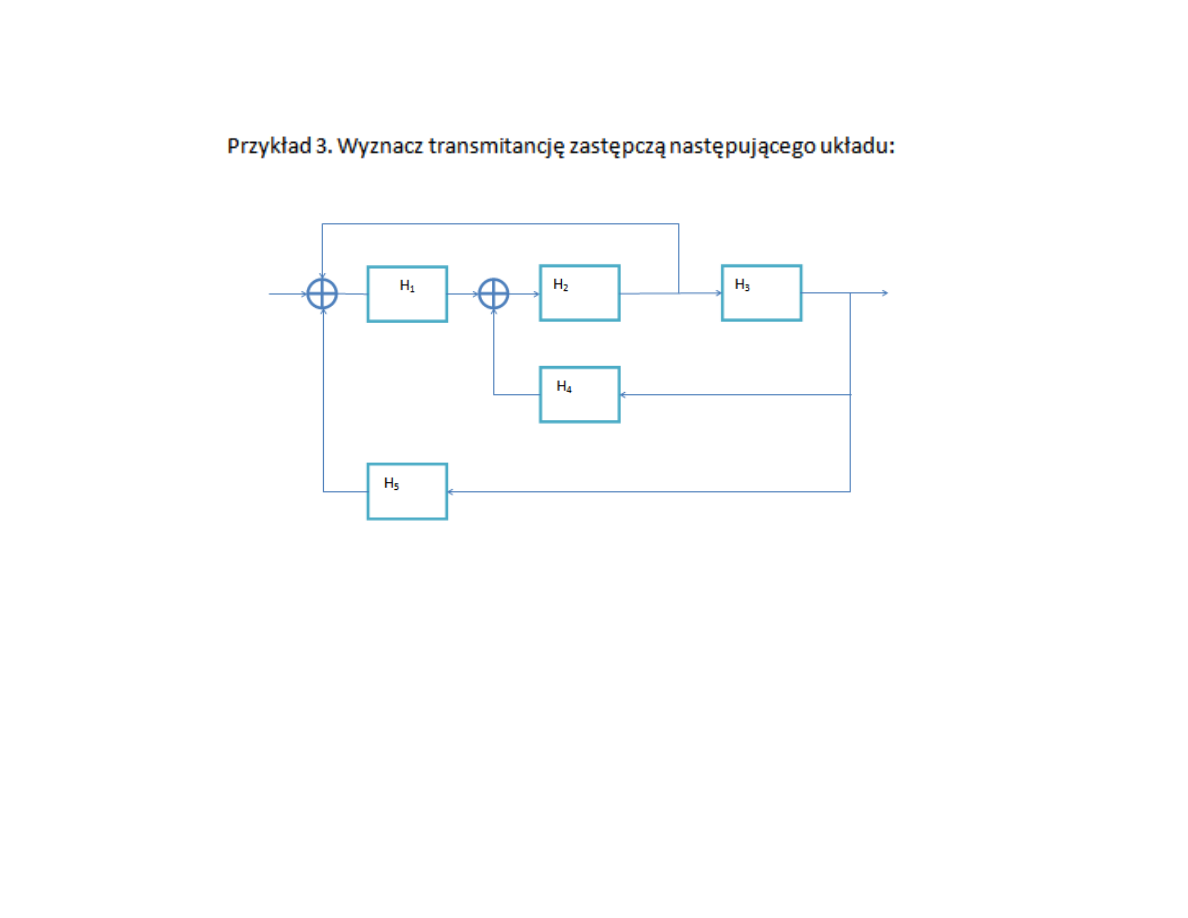
Przykład
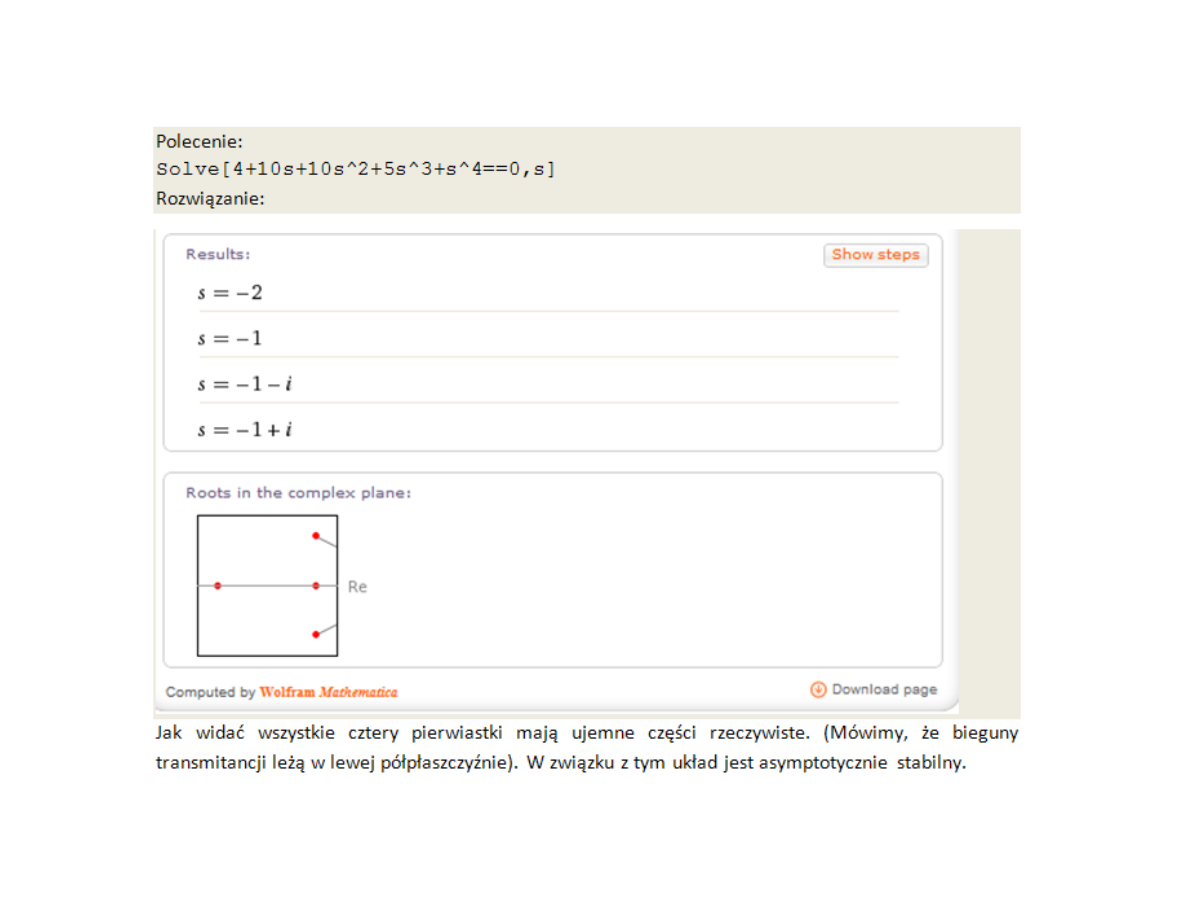
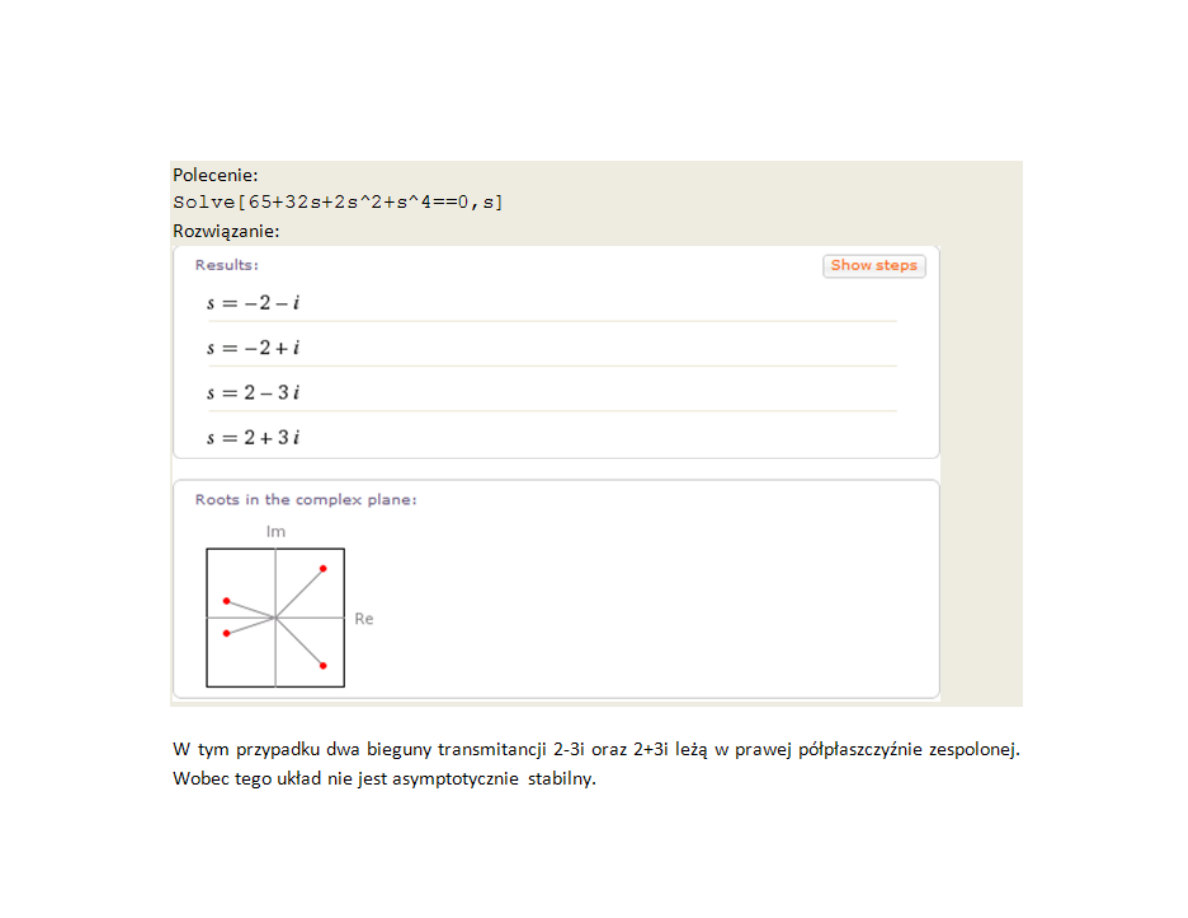
Przykład 2
Dobór nastaw regulatorów
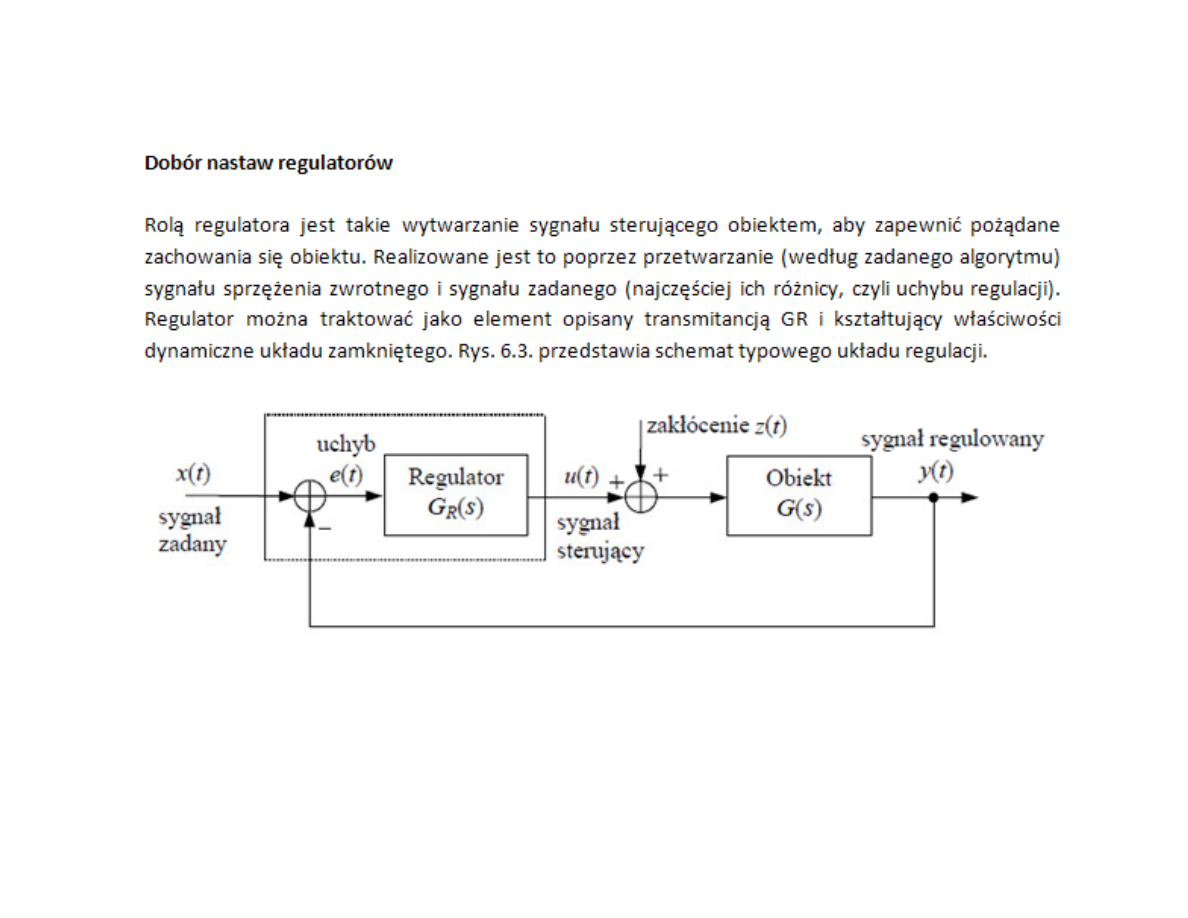
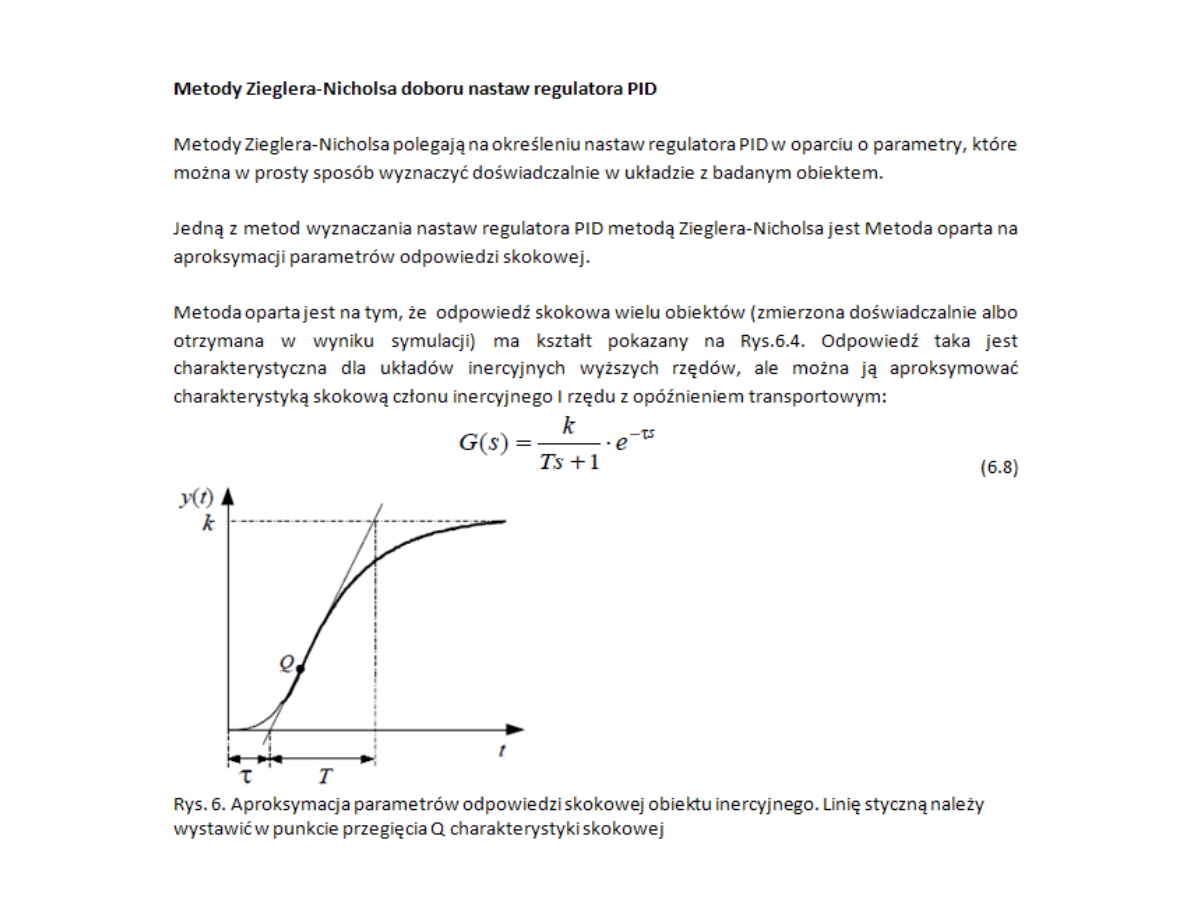
Mając przebieg odpowiedzi skokowej rzeczywistego obiektu można wyznaczyć
graficznie
stałą
czasową
T
i
opóźnienie
τ
transmitancji
zastępczej.
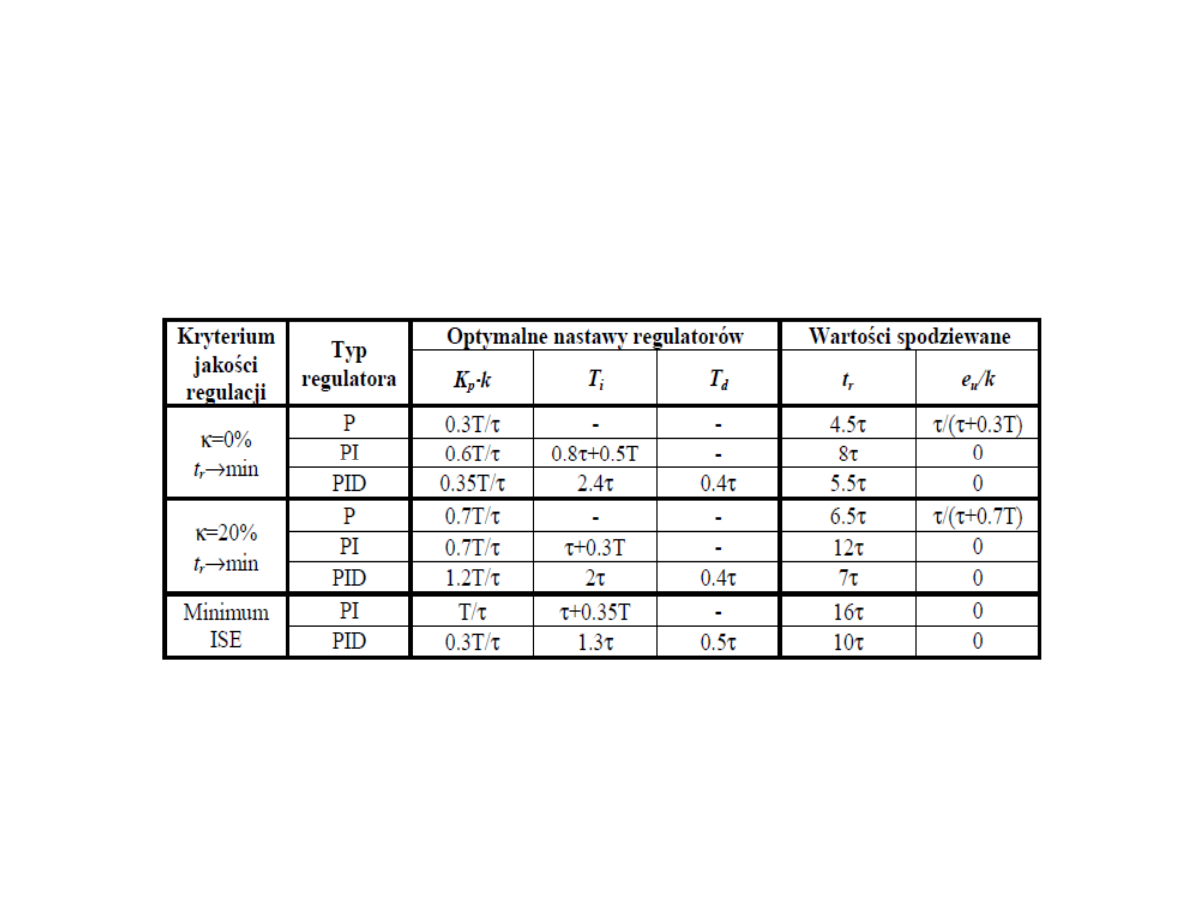
Nastawy regulatora spełniające określone kryterium oblicza się zgodnie z wzorami
zamieszczonymi w Tabeli 1.
Wyszukiwarka
Podobne podstrony:
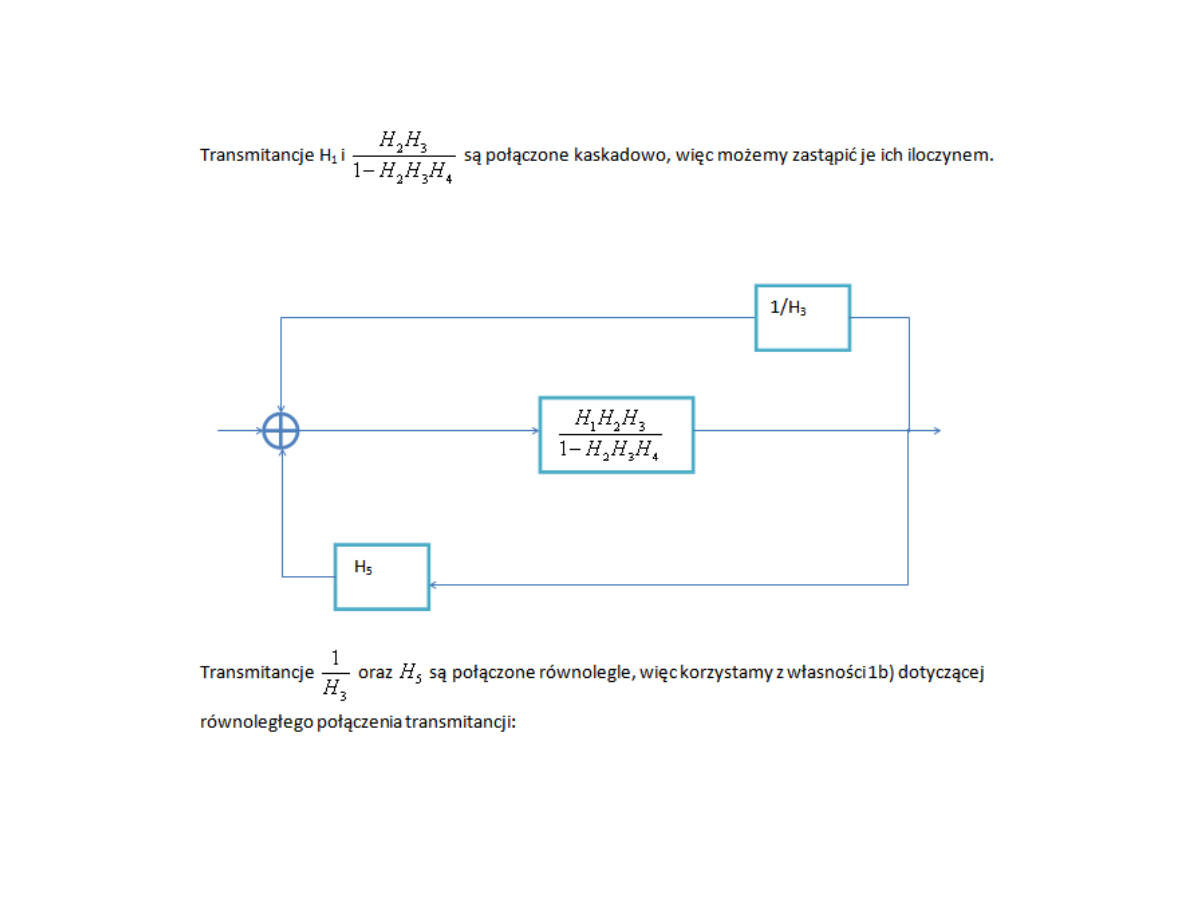
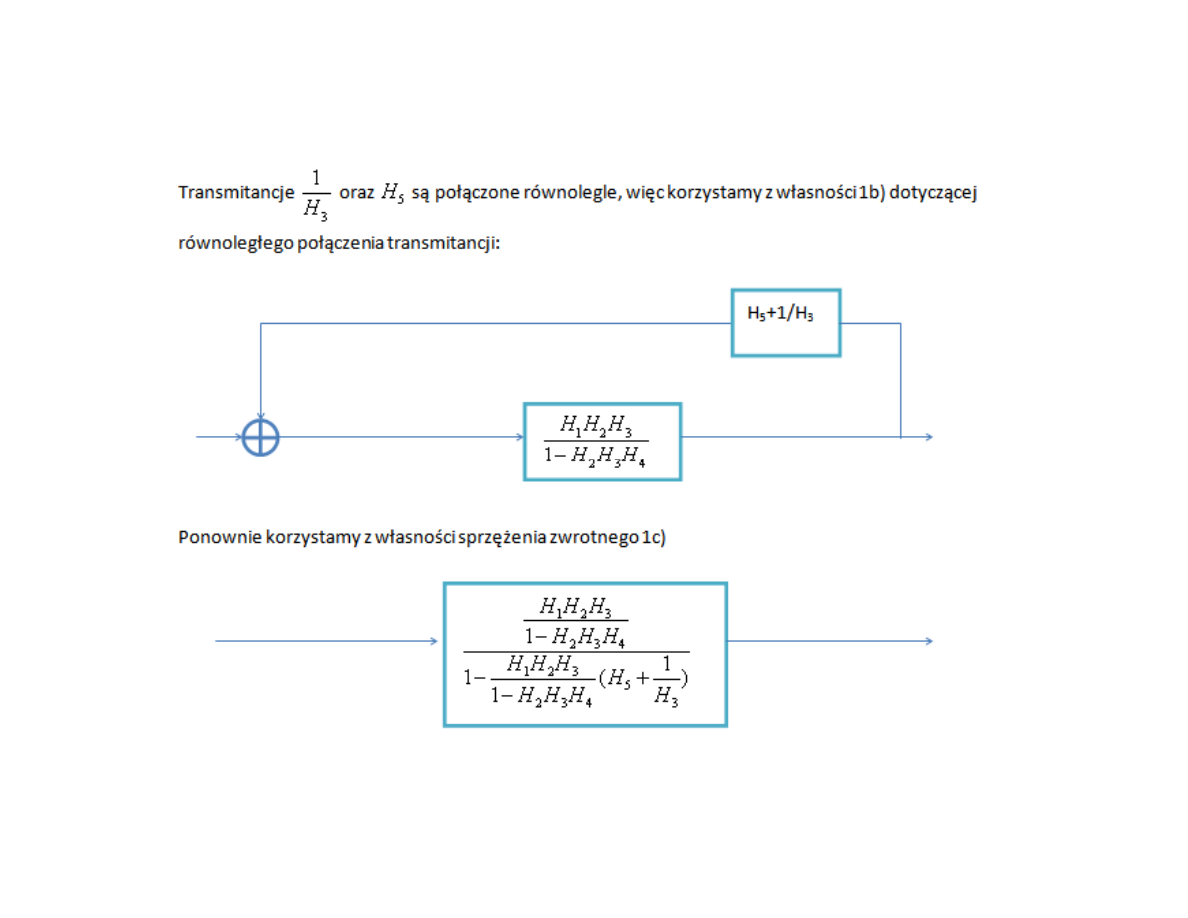
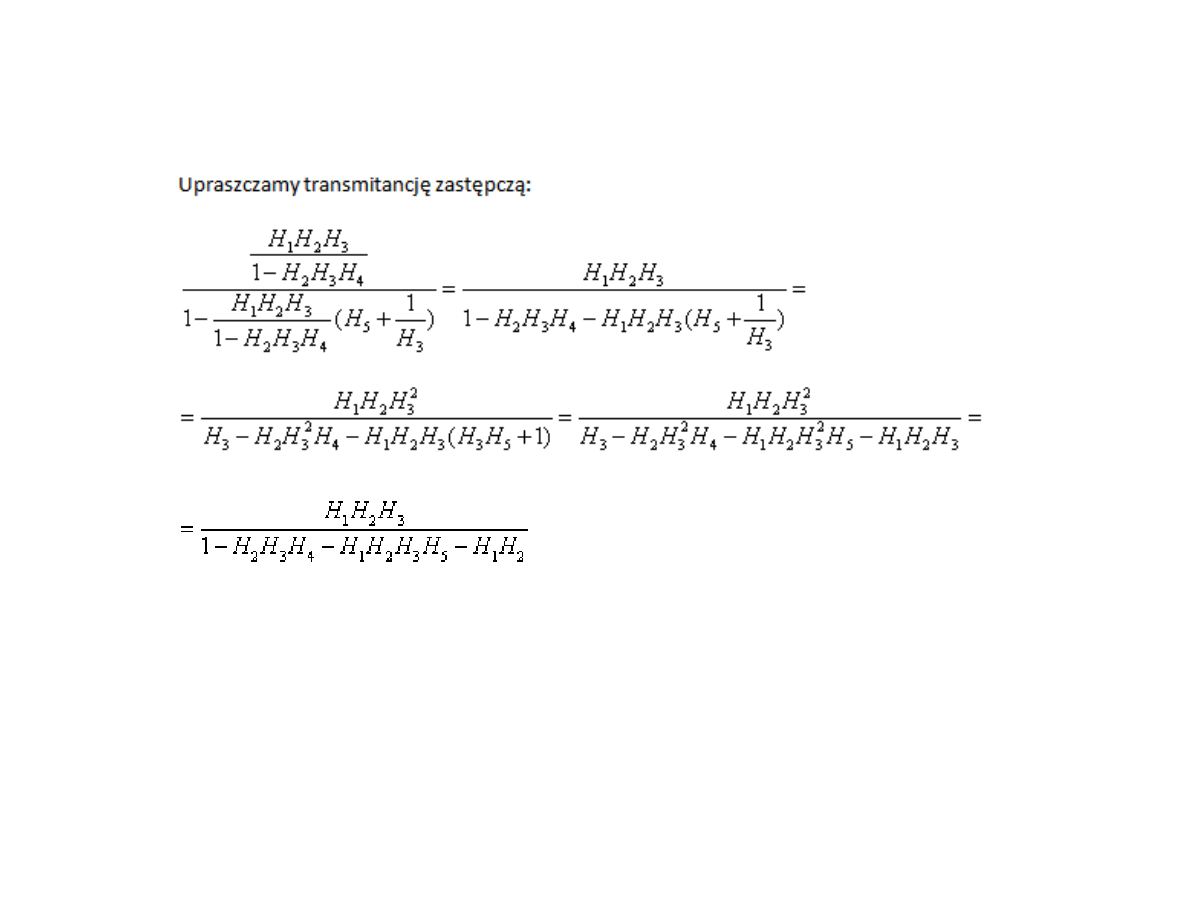
Przekształcenia schematów blokowych
Przekształcenia schematów blokowych
przekształcanie schematów blokowych 1
Przekształcanie schematów blokowych
5 Algorytmy i schematy blokowe
3 Projektowanie układów automatyki (schematy blokowe, charakterystyki)
10 schematy blokowe i grafy (jako zobrazowanie modeli matematycznych)
Schemat blokowy For 1
Schemat blokowy Do While 2
SCHEMAT BLOKOWY
SCHEMAT BLOKOWY RADARU
Algebra schematów blokowych c d
Schemat blokowy If 1
Schemat blokowy For 3
SCHEMATY BLOKOWE ODBIORNIKÓW
06-10, schematy-blokowe
Schemat blokowy While 3
więcej podobnych podstron