Wiktor Luzarowski
Piotr Majkusiak
Marcin Kupiec
gr 24
Roboty przemysłowe
Laboratorium 5
Sprawozdanie
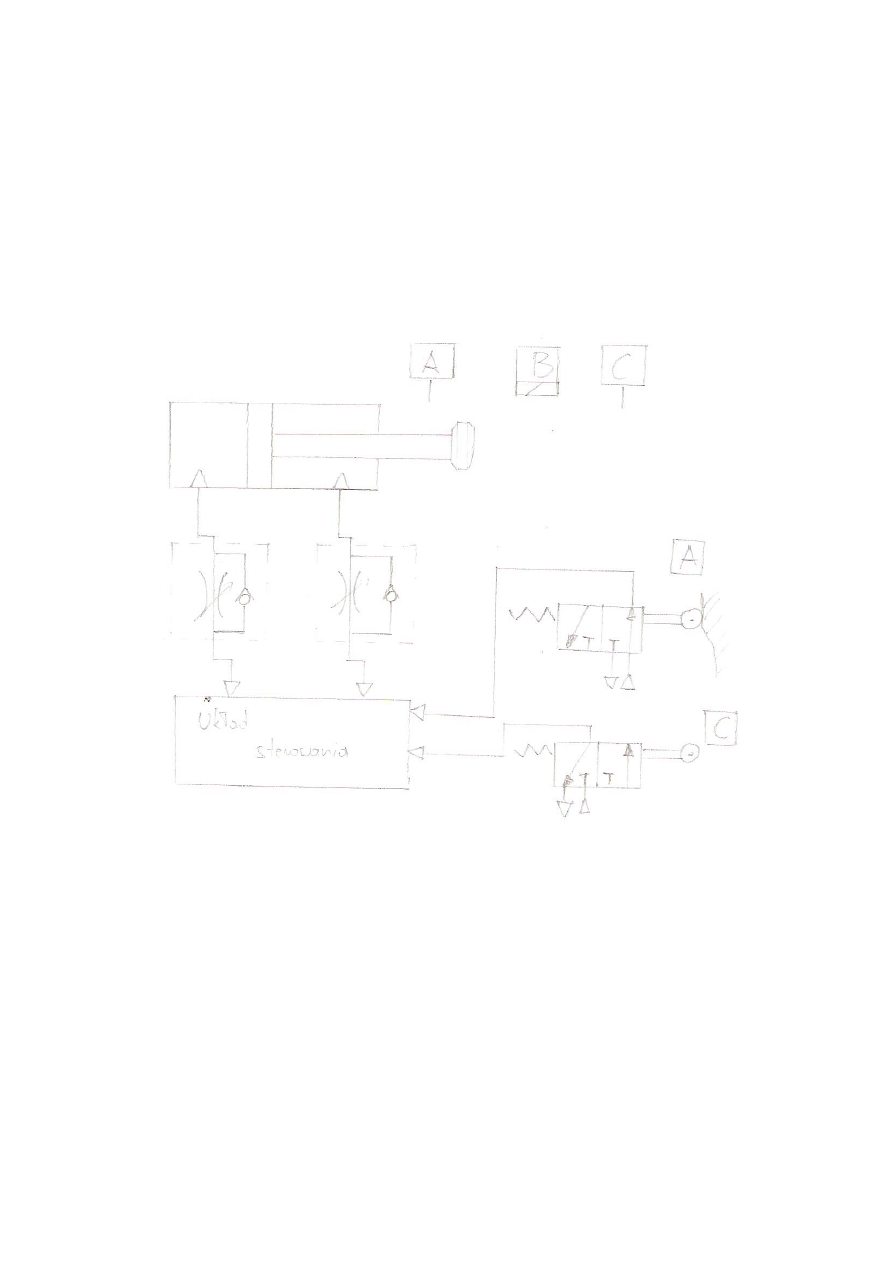
1. Opis stanowiska pomiarowego
Układ pomiarowy:
Czujnik położenia z diodą laserową OMRON Z4M
Wzmacniacz pomiarowy OMRON W100
Rejestrator cyfrowy TEAC GX-1
Komputer pomiarowy z oprogramowaniem: GX-1 Navigator, GxView
2. Opis przeprowadzonego pomiaru
Siłownik wykonywał ruch w cyklu: A->B->A->C->B->C->A. Dla dwóch wartości dławienia
mierzyliśmy położenia punktów A,B,C. Rejestrator miał ustawioną częstotliwość próbkowania na
500 Hz, a częstotliwość odcięcia filtru dolnoprzepustowego na 200Hz. Zakres wynosił -10V do
+10V. Pomiary zostały eksportowane do komputera i zapisane w postaci pliku tekstowego.
3. Algorytm wyznaczania powtarzalności pozycjonowania
W celu wyznaczenia powtarzalności opracowaliśmy algorytm, który wyznaczał współrzędne
charakterystycznych punktów. Z powodu dużej ilości zakłóceń sygnał poddaliśmy wstępnemu
wygładzeniu przy użyciu metody średniej kroczącej. Następnie wyznaczyliśmy pochodną sygnału
i szukaliśmy wszystkich ekstremów lokalnych z których utworzyliśmy wektor. Na podstawie
danych z tego wektora szukaliśmy obszarów, w których występują drgania sygnałów
i uśrednialiśmy wartość sygnału w tych obszarów. Taką średnią uznawaliśmy za wartość sygnału
w odpowiednim punkcie charakterystycznym.
Za początek obszaru drgań uznawaliśmy ekstremum odległe o odpowiednią wartość od
poprzedniego, a za koniec drgań odpowiednio odległe od następnego ekstremum w tablicy.
Algorytm ten sprawdza się także w przypadku pików w których nie występują żadne zakłócenia.
Po wyznaczeniu punktów charekterystycznych dla 20 kolejnych okresów obliczyliśmy
powtarzalność pozycjonowania każdego punktu. Ten sam punkt przy dojściu z różnych pozycji
traktowaliśmy jako dwa osobne, w związku z czym dla każdej serii pomiarów otrzymaliśmy 6
wartości powtarzalności pozycjonowania.
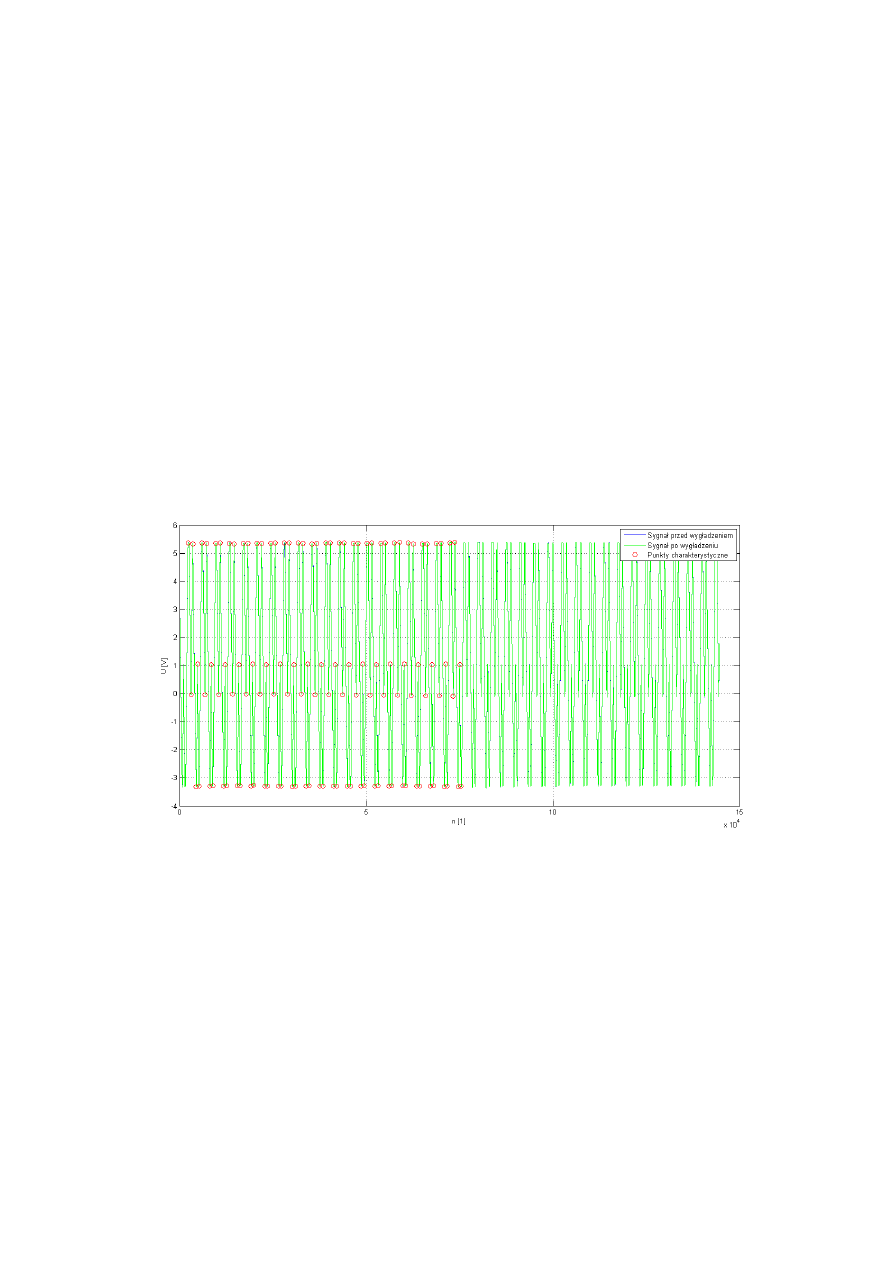
4. Opis zarejestrowanych przebiegów
Dla pierwszej serii pomiarów
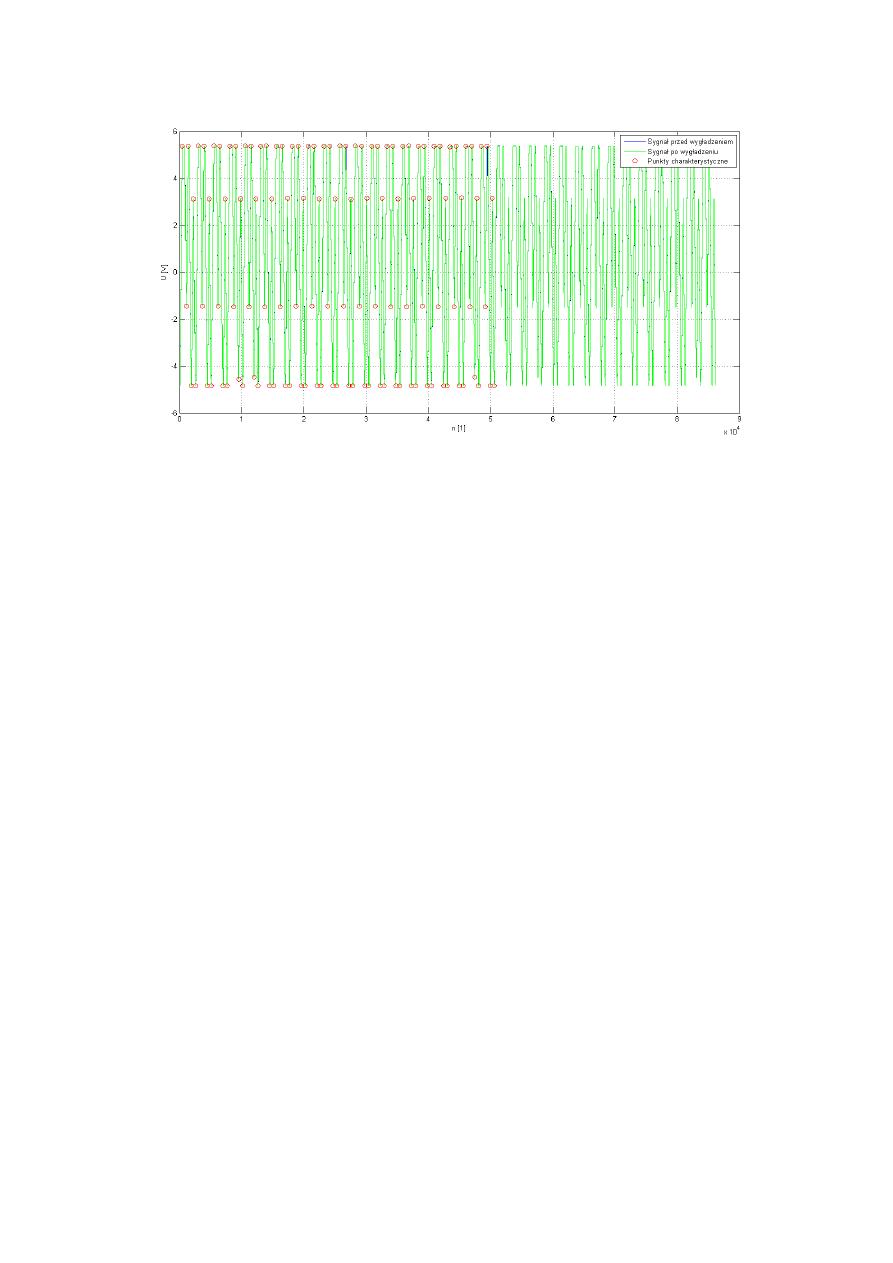
Dla drugiej serii pomiarów
W obu przypadkach wystąpiło zjawisko drgań w charakterystycznych punktach, oraz zmiana znaku
pochodnej sygnału w trakcie ruchu między punktami świadcząca o występowaniu ekstremum
lokalnego. Wymusiło to rozszerzenie algorytmu o wygładzanie sygnału metodą średniej kroczącej.
Dodatkowo w kilku miejscach można zaobserwować znaczną rozbieżność punktu C przy dojściu z
punktu A.
5. Prezentacja wyników wynaczania powtarzalności
Przy wykorzystaniu implementacji opisanego wcześniej algorytmu w Matlabie otrzymaliśmy
następujące wyniki (a – I seria pomiarów, b – druga seria):
Powtarzalność pozycjonowania punktu A przy ruchu z punktu C
a) 0.3272 mm
b) 0.2526 mm
Powtarzalność pozycjonowania punktu A przy ruchu z punktu B
a) 0.4447 mm
b) 0.1643 mm
Powtarzalność pozycjonowania punktu B przy ruchu z punktu A
a) 0.5561 mm
b) 0.2213 mm
Powtarzalność pozycjonowania punktu B przy ruchu z punktu C
a) 0.1646 mm
b) 0.3754 mm
Powtarzalność pozycjonowania punktu C przy ruchu z punktu A
a) 0.2577 mm
b) 3.4480 mm
Powtarzalność pozycjonowania punktu C przy ruchu z punktu B
a) 0.2373 mm
b) 0.0624 mm

6. Wnioski
•
Kolejność ruchu ma istotne znaczenie dla powtarzalności pozycjonowania układu. Znacząco
różne wartości otrzymujemy np dla puntu B gdy siłownik przemieszcza się do niego
z punktu A niż gdy przemieszcza się z punktu C.
•
Dla większej prędkości siłownika otrzymaliśmy powtarzalność niezgodną
z przewidywaniami – w niektórych punktach jest ona lepsza niż przy ruchu z mniejszą
prękością.
•
W przypadku drugiej serii pomiarów dla punktu C przy ruchu z punktu A otrzymalismy
powtarzalność pozycjonowania powyżej 3 mm. Tak duża wartość może wynikać ze
znacznej rozbieżności pozycji kilku punktów C widocznej na wykresie.
Wyszukiwarka
Podobne podstrony:
MSIB Instrukcja do wiczenia LAB Nieznany
Przemiany termodynamiczne lab n Nieznany
Mechanika Plynow Lab, Sitka Pro Nieznany
PO lab 5 id 364195 Nieznany
lab [5] id 258102 Nieznany
Lab 6 PMI Hartownosc Sprawozdan Nieznany
CCNA4 lab 3 3 2 pl id 109125 Nieznany
Lab 05 Obliczenia w C id 257534 Nieznany
LAB 4 Lab2 WprowadzenieMATLAB 2 Nieznany
lab [1] id 258099 Nieznany
chemia fizyczna lab id 112228 Nieznany
CCNA4 lab 1 1 4a pl id 109119 Nieznany
Lab 03 Analiza obwodu elektrycz Nieznany
Lab nr 3 id 258529 Nieznany
CCNA4 lab 1 1 4b pl id 109120 Nieznany
CCNA4 lab 4 3 7 pl id 109128 Nieznany
Ansys LAB 6 Tutorial Excel prog Nieznany (2)
Lab KN cw 5 id 258468 Nieznany
Badania symulacyjne i lab siln Nieznany (2)
więcej podobnych podstron