Zeszyty Problemowe – Maszyny Elektryczne Nr 72/2005
149
Janusz Hetmańczyk, Krzysztof Krykowski
Politechnika Śląska, Gliwice
BADANIA SYMULACYJNE I LABORATORYJNE SILNIKA
PM BLDC WYKORZYSTUJĄCEGO CZUJNIK POŁOŻENIA
WIRNIKA W OBWODZIE REGULACJI PRĘDKOŚCI
SIMULATION AND LABORATORY TESTS OF A PM BLDC MOTOR
WITH ROTOR POSITION SENSOR IN VELOCITY CONTROL CIRCUIT
Abstract: In the paper the control system for permanent magnet brushless DC motor is considered. The
simulation research results as well as the results of the experiment result carried out using the control system
are presented. There were the following conditions of the experiment: speed measurement was performed with
the position sensor, the frequency of position sensor signals were proportional to motor velocity. Due to the
measurement delay time variability and dependence on the rotational speed of the motor, adaptation regulator
was used as a part of the control system. The algorithm of the adaptation regulator stetting parameters selec-
tion is referred in [3].As a results of simulation and experiment test, the authors shown waveforms of speed
and torque of PM BLDC motor.
The laboratory test was performed on laboratory stand for evaluation of
drives with PM BLDC motor properties. The laboratory stand was designed for rapid prototyping of BLDC
motor control systems. The DS 1104 controller board was used as the main controller of BLDC motor.
1. Wprowadzenie
Układy napędowe z silnikami PM BLDC sta-
nowią dużą grupę urządzeń małej i średniej
mocy. Charakterystyki mechaniczne silników z
magnesami trwałymi są takie same jak charak-
terystyki mechaniczne silników obcowzbud-
nych komutatorowych prądu stałego. Równo-
cześnie silniki bezszczotkowe posiadają szereg
zalet z których najważniejsze to:
•
prostsza konstrukcja i brak komutatora;
•
wyższa sprawność spowodowana niższymi
stratami (od 15 do 25%);
•
dobre właściwości dynamiczne, często nie
wykorzystywane.
Niekorzystną ich cechą jest wyższa cena w po-
równaniu do innych silników w tym zakresie
mocy. Silnik bezszczotkowy prądu stałego jest
zasilany ze źródła napięcia stałego (najczęściej
akumulator) poprzez komutator elektroniczny
pełniącego rolę falownika. Przekształcanie to
odbywa się cykliczne poprzez przełączanie za-
cisków odbiornika do różnych biegunów źródła
napięcia stałego. Ponieważ w silniku bezsz-
czotkowym uzwojenie jest nieruchome a wiruje
magneśnica wytwarzająca pole magnetyczne,
dlatego do układu sterowania silnika musi być
dostarczona informacja o położeniu wirnika
względem uzwojenia twornika. Do identyfikacji
położenia wirnika wykorzystuję się zestaw
trzech czujników dyskretnych nazywanych w
dalszych rozważaniach czujnikami położenia
wirnika (w skrócie CPW). Jako czujniki poło-
żenia wirnika najczęściej stosuje się czujniki
hallotronowe.[1]
CPW
Układ logiczny wypracowywujący
funkcję załączania tranzystorów
U
DC
T
1
T
3
T
5
T
4
T
6
T
2
1
L
2
L
3
L
θ
R
w
2
i
1
i
3
i
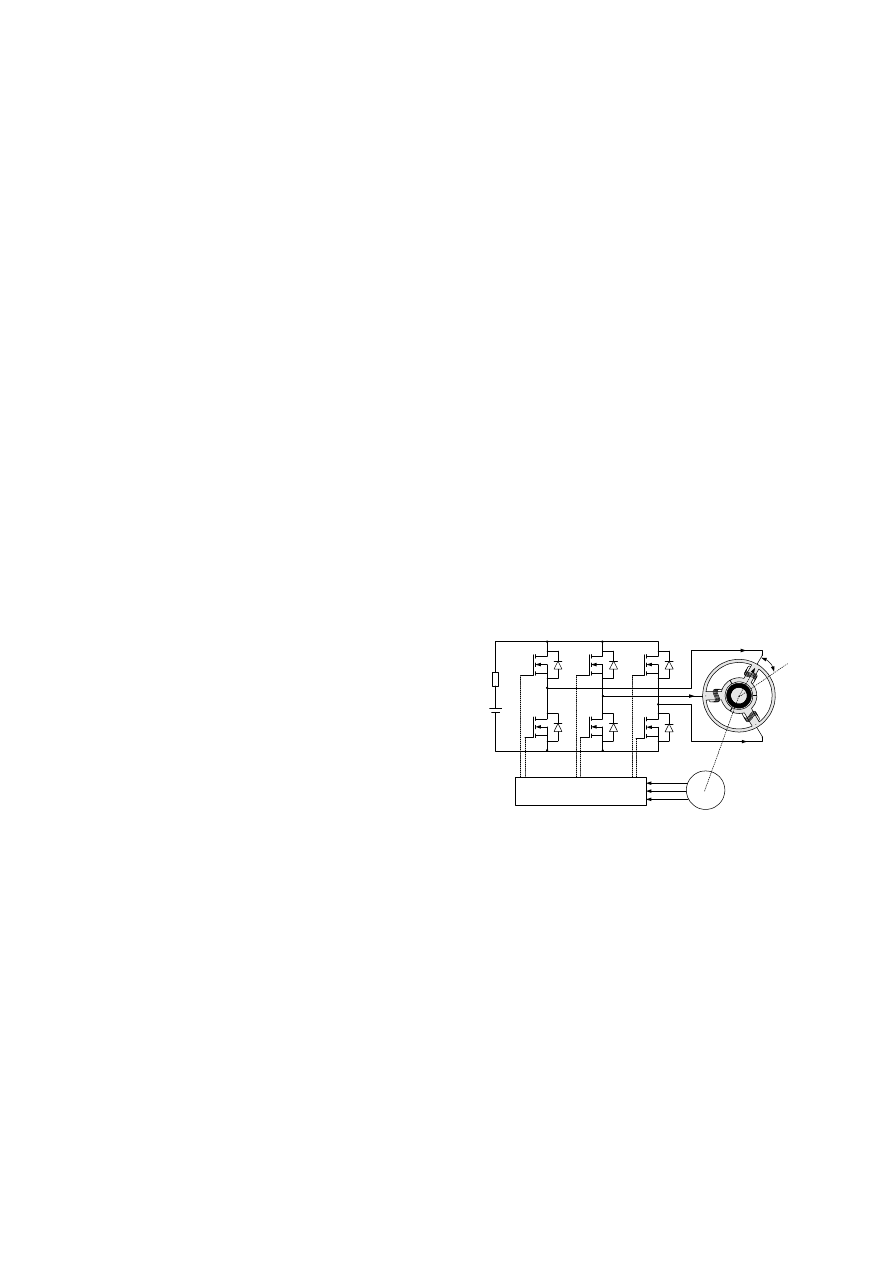
Rys.1. Schemat układu zasilania bezszczotko-
wego silnika prądu stałego
Częstotliwości sygnału wyjściowego z czujnika
Halla jest proporcjonalna do aktualnej prędko-
ści silnika. Sygnał ten można wykorzystać w
pętli sprzężenia zwrotnego prędkości. Wyko-
rzystanie tej metody pomiaru prędkości po-
zwala na korzystanie z silników nie wyposażo-
nych w prądnice tachometryczne w układach z
regulatorem prędkości.
W artykule przedstawiono wyniki badań sy-
mulacyjnych i eksperymentalnych dla układu z
pomiarem impulsowym. Algorytm doboru na-
staw regulatora adaptacyjnego prędkości został
przedstawiony w artykule [3].
Zeszyty Problemowe – Maszyny Elektryczne Nr 72/2005
150
+
R
R
sT
K
1
1
p
p
s
K
τ
+
1
2
1
1
s
T
T
s
T
K
m
S
m
f
+
+
)
(s
ω
Z
ω
ω
ω
τ
s
K
+
1
0
τ
ω
s
e
K
−
a)
b)
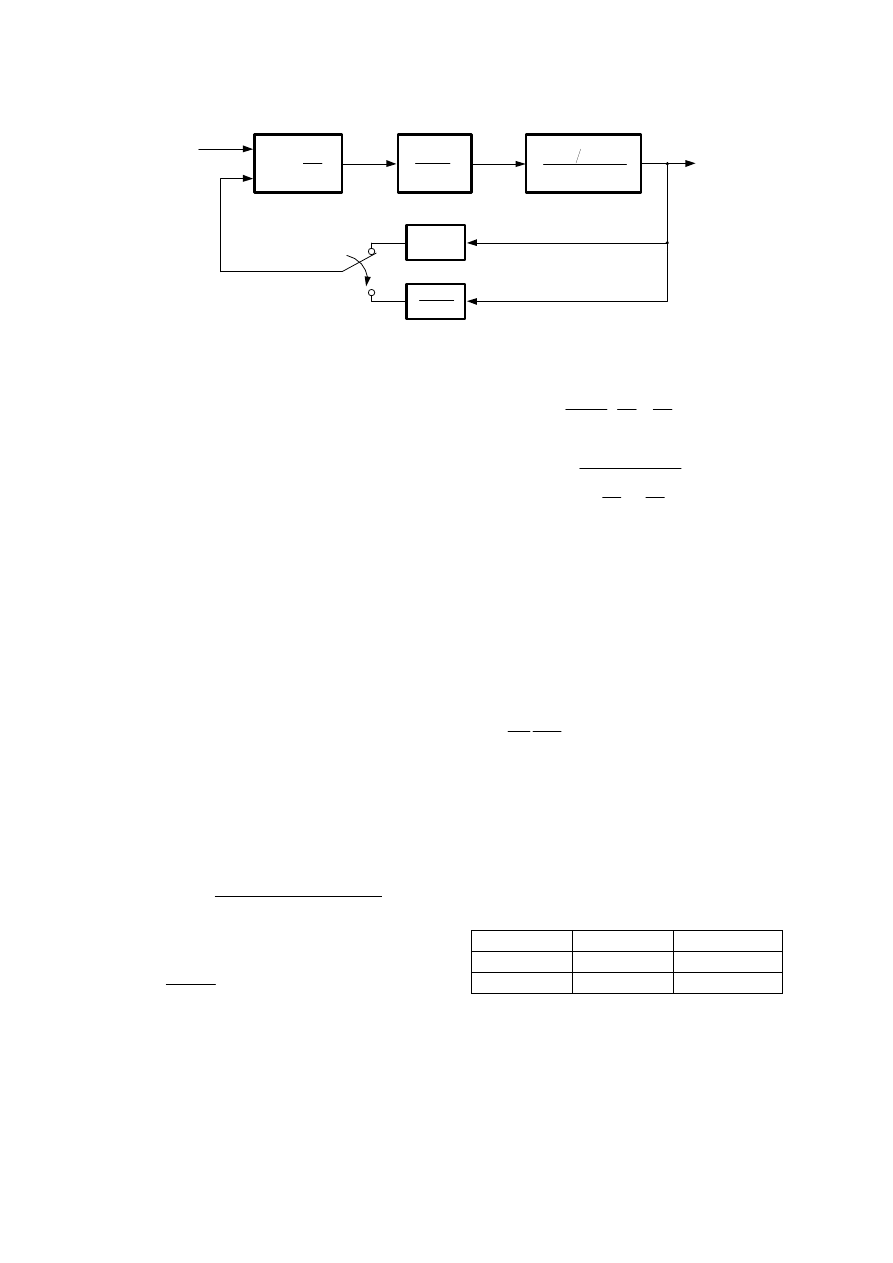
Rys. 2. Schemat blokowy układ regulacji silnika PM BLDC
2. Obiekt badań
Obiektem badań jest układ regulacji silnika
bezszczotkowego prądu stałego typu RTM ct-
85-1 produkcji ELKAR – Warszawa, o para-
metrach znamionowych U
n
= 24 V, I
n
= 18,5 A,
ω
n
= 314 rad/s, R
t
= 0,13Ω, L
t
= 0,25 mH, o
stałej elektromechanicznej T
m
=3,4 ms i liczbie
par biegunów równej p = 3. Silnik był zasilany
z baterii akumulatorów poprzez przekształtnik
(komutator elektroniczny) z tranzystorami
MOSFET typu IRF 2807. Częstotliwość przełą-
czeń zaworów wynosiła 5 kHz.
Na rysunku 2 przedstawiono schemat blokowy
układu regulacji prędkości silnika PM BLDC,
w których wyszczególniono dwa rodzaje ukła-
dów pomiarowych prędkości. Przypadek a) od-
powiada pomiarowi z wykorzystaniem tacho-
prądnicy, natomiast przypadek b) symbolizuje
pomiar prędkości z wykorzystaniem przetwor-
nika impulsowego.
Transmitancja operatorowa otwartego układu
regulacji prędkości, kiedy do pomiaru wykorzy-
sta się prądniczkę tachometryczną o małej stałej
czasowej
τ
ω
i wzmocnieniu K
ω
po przekształ-
ceniach ma postać:
)
1
)(
1
)(
1
(
)
(
0
S
m
z
o
sT
sT
s
K
s
G
+
+
+
=
τ
ω
(1)
gdzie:
τ
z =
τ
p +
τ
ω
- zastępcza mała stała czasowa
f
P
K
K
K
K
ω
ω
=
0
- wzmocnienie w otwartej pętli
sprzężenia zwrotnego
Zgodnie z zasadami obowiązującymi przy do-
borze regulatora dla obiektu o transmitancji (1)
według kryterium optimum modułu gdy
(
T
m
, T
S
) >>
τ
z
dla regulatora typu PI nastawy
wyznaczono z wzorów [3,4]:
82
,
0
2
1
0
=
+
=
m
S
S
m
R
T
T
T
T
K
K
ω
(2)
ms
T
T
T
T
T
T
T
S
m
S
m
S
m
R
7
,
3
1
2
=
+
+
+
=
(3)
W przypadku wykorzystania do pomiaru pręd-
kości przetwornika impulsowego zastosowano
kryterium zalecane dla obiektów z czasem
martwym. Szczegółowy opis doboru został za-
mieszczony w artykule [3]. Wzmocnienie re-
gulatora adaptacyjnego jest zależne od prędko-
ści silnika, czyli:
ω
ω
⋅
=
A
R
K
K
(4)
gdzie:
ω
π
0
6
,
0
K
T
p
K
m
A
=
- współczynnik
wzmocnienia
regulatora dla znamionowej
prędkości obrotowej.
Zakładając, że prędkość silnika będzie zmie-
niała się w granicach od 1 rad/s do prędkości
znamionowej
ω
n
, to graniczne wartości wzmoc-
nienia regulatora adaptacyjnego będą wynosić:
Tab. 1. Nastawy
regulatora
adaptacyjnego
prędkości
ττττ
0
[s]
ω
ω
ω
ω [rad/s]
K
Rω
ω
ω
ω
τ
0min
=3,3 10
-3
ω
n
=314
K
R
ω
n
= 0,48
τ
0max
=1
ω
min
= 1
K
R
ω
min
= 0.001
Stała regulatora adaptacyjnego jest równa elek-
tromechanicznej stałej czasowej T
R
ω
= T
m
.
3. Badania symulacyjne
Symulacja komputerowa jest nowoczesną me-
todą badawczą pozwalającą w istotny sposób
skrócić czas i obniżyć koszty prac badawczych
Zeszyty Problemowe – Maszyny Elektryczne Nr 72/2005
151
przy analizie i projektowaniu napędów prze-
kształtnikowych. Punktem wyjścia do badań
symulacyjnych jest przygotowanie modelu ma-
tematycznego a następnie modelu komputero-
wego w wybranym programie symulacyjnym.
3.1 Model komputerowy silnika PM BLDC
Model komputerowy bezszczotkowego silnika
prądu stałego został zbudowany na podstawie
równań matematycznych opisujących działanie
tego silnika. W modelu tym przyjęto następu-
jące założenia upraszczające:
• obwód magnetyczny nienasycony i jedno-
znaczny,
• obwody elektryczne symetryczne,
• indukcja magnetyczna w szczelinie pod ma-
gnesami ma wartość stałą, zaś w strefie po-
między magnesami jest równa zero,
• moment reluktancyjny równy zero,
• magnesy trwałe obejmują 0,7 obwodu wir-
nika,
• kąt pracy zaworów wynosi 120°el.
Obwód główny k-tej fazy (gałęzi) silnika (rys.1)
jest opisany zależnością:
k
k
Sk
k
Sk
k
e
dt
di
L
i
R
u
+
+
=
(5)
W powyższej zależności przez
e
k
oznaczono
składową fazowej SEM pochodzącą od ma-
gnesu trwałego, zaś przez
R
Sk
oraz
L
Sk
ozna-
czono zastępcze fazowe: rezystancję i indukcyj-
ność stojana. Zastępcza fazowa indukcyjność
zależy od indukcyjności głównej stojana
L
Sm
oraz od indukcyjności rozproszenia
L
S
σ
zgodnie
z relacją:
σ
S
Sm
Sk
L
L
L
+
=
2
3
(6)
zaś fazowa SEM rotacji pochodząca od ma-
gnesu trwałego wynosi:
)
(
k
fk
k
K
e
θ
ω
⋅
=
(7)
W silnikach PM BLDC dąży się do tego, by fa-
zowa SEM miała kształt trapezu o górnej pod-
stawie równej 120°el. Moment elektromagne-
tyczny wytworzony w wyniku współdziałania
k-tego uzwojenia fazowego i strumienia ma-
gnesu trwałego jest opisany zależnością:
)
(
k
fk
k
k
k
k
K
i
i
e
M
θ
ω
⋅
=
=
(8)
Całkowity moment elektromagnetyczny jest
natomiast sumą składowych momentów elek-
tromagnetycznych i wynosi:
∑
=
=
m
k
ek
e
M
M
1
(9)
W przypadku silnika o jednej parze biegunów,
współczynnik wzbudzenia K
fk
występujący w
zależnościach (7) oraz (8), jest równy strumie-
niowi skojarzonemu z k-tym uzwojeniem sto-
jana.
O właściwościach dynamicznych silnika decy-
duje moment dynamiczny określony zależno-
ścią:
dt
d
J
M
M
M
m
e
d
ω
=
−
=
(10)
taką samą jak w przypadku innych rodzajów
silników elektrycznych.
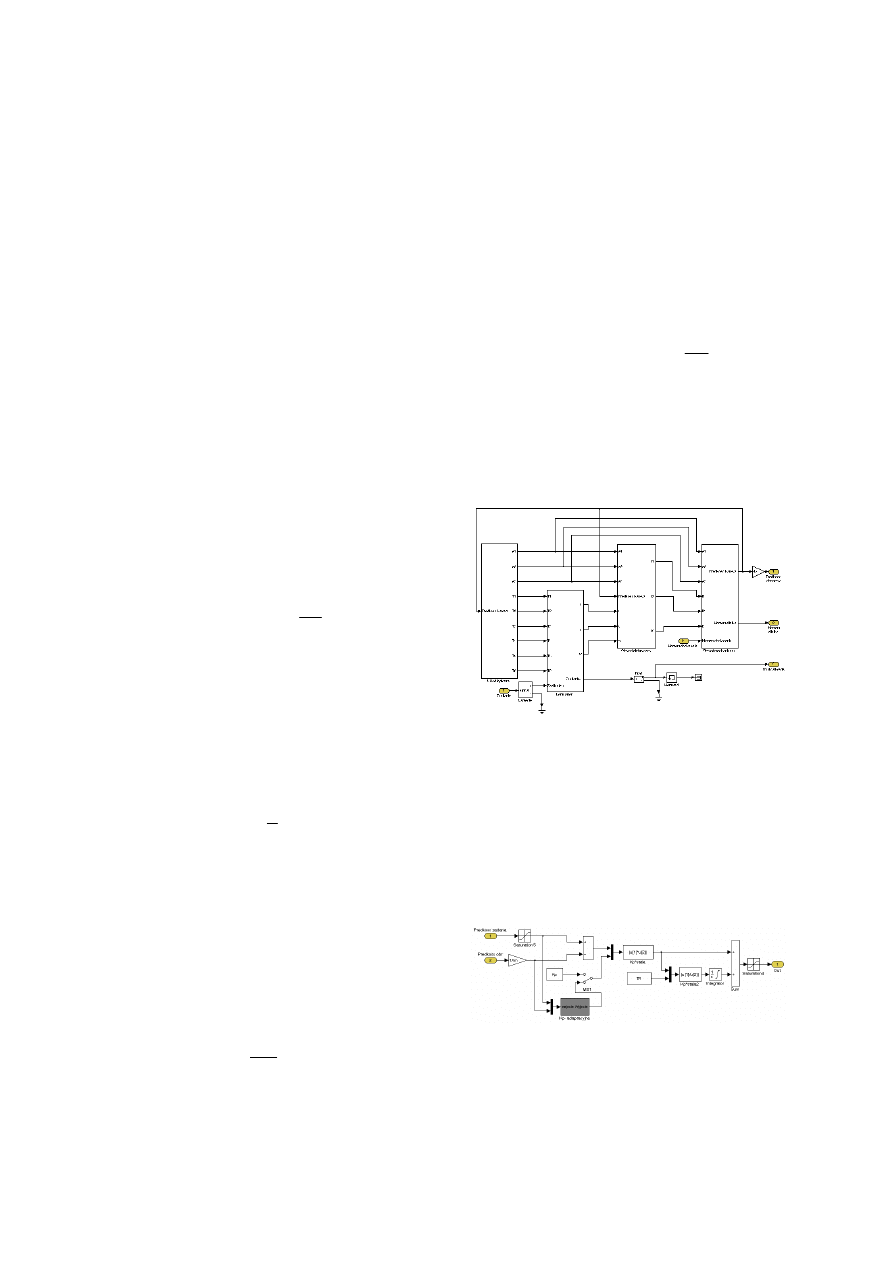
Na rysunku 3 przedstawiono model obwodowy
silnika PM BLDC z wyszczególnionym komu-
tatorem elektronicznym, obwodem elektrycz-
nym i mechanicznym oraz układem logicznym.
Rys. 3. Model obwodowy bezszczotkowego sil-
nika prądu stałego w Simulinku
Natomiast na rys. 4 przedstawiono układ
regulatora adaptacyjnego, którego wartość
sygnału wyjściowego jest funkcją prędkości
zadanej i aktualnej. W układzie tym możliwe
jest również badanie klasycznej konstrukcji
regulatora.
Rys. 4. Model regulatora adaptacyjnego
3.2 Wyniki symulacji
Zarówno dla badań symulacyjnych jak i labo-
ratoryjnych jako kryterium określające właści-
wości badanego układu regulacji silnika przy-
Zeszyty Problemowe – Maszyny Elektryczne Nr 72/2005
152
jęto porównanie charakterystycznych przebie-
gów prędkości i momentu silnika. W tym celu,
układ sterowania silnika PM BLDC poddano
działaniu skokowo zmieniających się wielkości
sterującej
ω
Z
jak i wielkości zakłócającej M
o
pracę napędu.
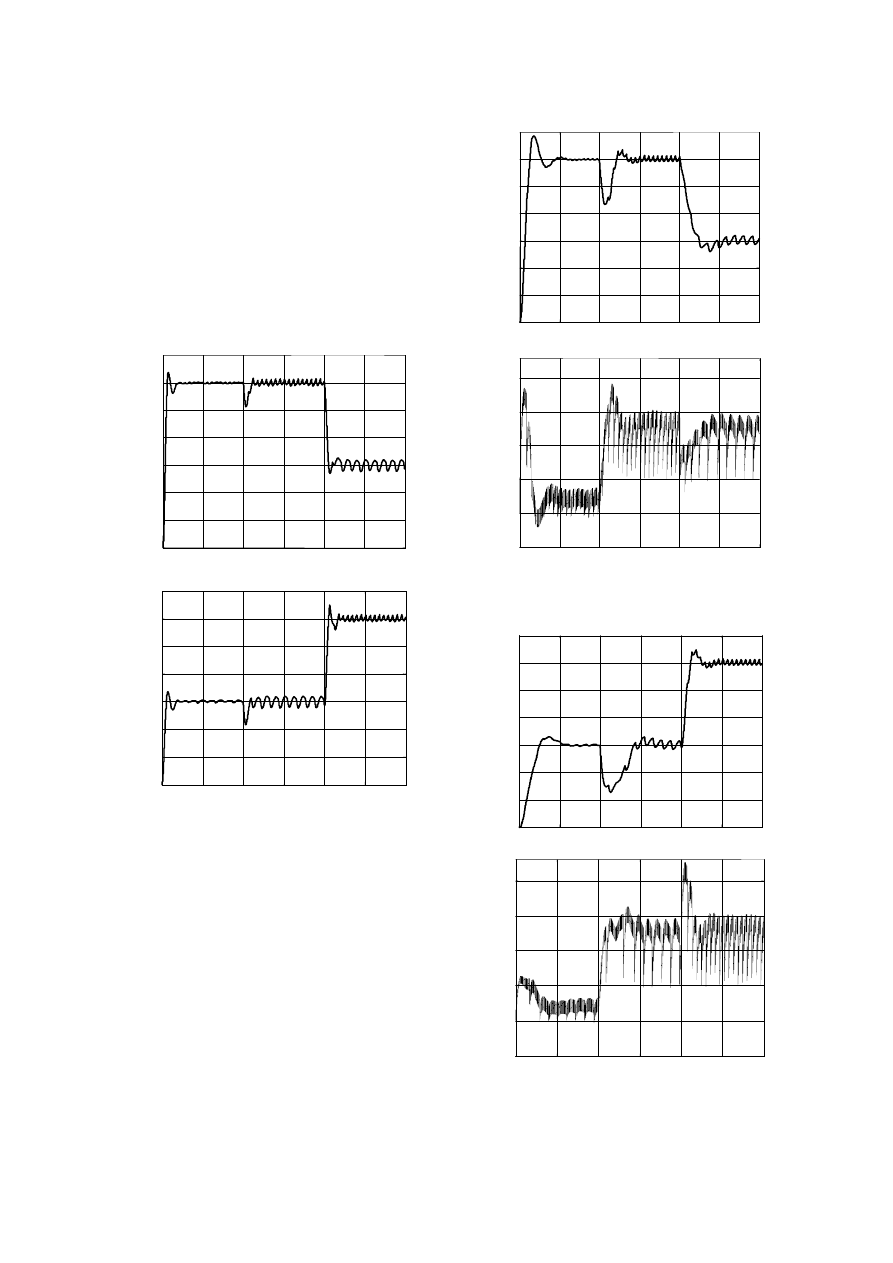
Na poniższych rysunkach przedstawiono prze-
biegi prędkości i momentu silnika bezszczot-
kowego prądu stałego w układzie, w którym
wykorzystano ciągły pomiar prędkości.
0
0.05
0.1
0.15
0.2
0.25
0.3
0
0.1
0.2
0.3
0.4
0.5
0.6
t
0
0.05
0.1
0.15
0.2
0.25
0.3
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
t
Rys.5. Przebieg prędkości i momentu silnika dla
układu z ciągłym pomiarem prędkości
Jak widać na przebiegach (rys. 5a i b) w ukła-
dzie wykorzystującym tachogenerator odpo-
wiedź układu na zakłócenie jest zawsze taka
sama niezależnie od prędkości obrotowej.
W przypadku układu regulacji wykorzystują-
cego impulsowy pomiar prędkości dynamika
odpowiedzi zależy od prędkości silnika. Wi-
doczne jest to na przebiegach prędkości
(rys. 6a i 7a) gdzie odbudowywanie prędkości
po wystąpieniu zakłócenia (0.1s) następuje z
0
0.05
0.1
0.15
0.2
0.25
0.3
0
0.1
0.2
0.3
0.4
0.5
0.6
t
0
0.05
0.1
0.15
0.2
0.25
0.3
-0.5
0
0.5
1
1.5
2
t
Rys.6. Przebieg prędkości a) i momentu b) sil-
nika z impulsowym pomiarem prędkości
0
0.05
0.1
0.15
0.2
0.25
0.3
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
t
0
0.05
0.1
0.15
0.2
0.25
0.3
-0.5
0
0.5
1
1.5
2
t
Rys.7. Przebieg prędkości a) i momentu b) sil-
nika z impulsowym pomiarem prędkości
a)
n
b)
M
a)
n
b)
M
a)
n
b)
M
Zeszyty Problemowe – Maszyny Elektryczne Nr 72/2005
153
Silnik
BLDC
Hamownica HC 4,6
DS 1104
dSpace
M
Nm
n
rpm
KPCI 3104
Keithley
P
C
I
B
U
S
Rys. 8. Struktura stanowiska badawczego do badań napędów z silnikami BLDC
różnymi czasami po wystąpieniu zakłócenia.
Podobna sytuacja występuje po zmianie
wielkości zadanej (0.2s). Odpowiedź układu po
skokowej zmianie prędkości zadanej (z wyższej
na niższą) trwa dłużej, w porównaniu z
przypadkiem gdy zmiana zadanej prędkości
następuje w kierunku wyższych prędkości.
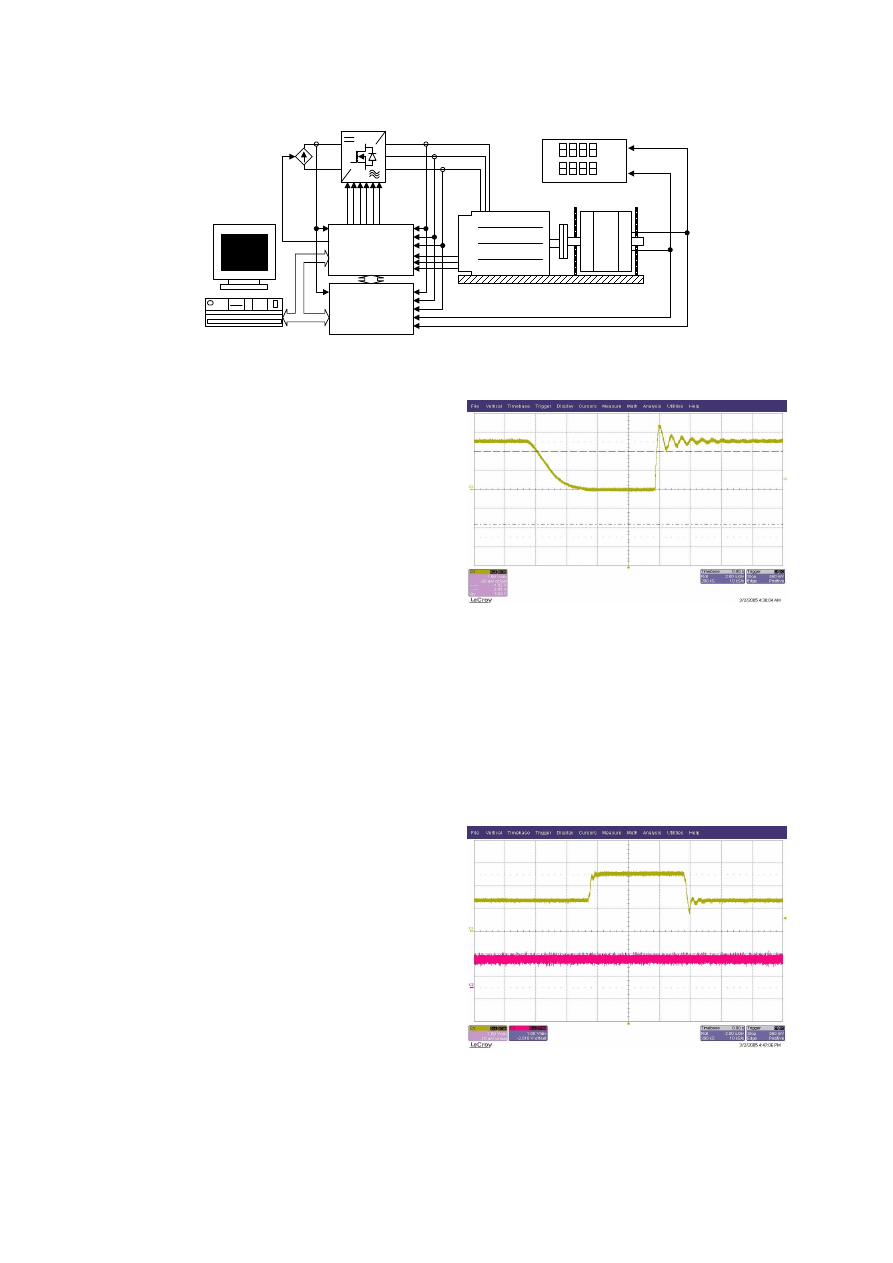
4. Badania laboratoryjne
Struktura stanowiska laboratoryjnego do badań
napędów z bezszczotkowymi silnikami została
przedstawiona na rysunku 1. Stanowisko zo-
stało dokładnie omówione [2]. Układ sterowa-
nia silnika z rys.1 pełni karta z procesorem sy-
gnałowym, która zastąpiła dedykowany układ
sterowania silnika BLDC. Zastosowanie ta-
kiego układu sterowania pozwala w sposób do-
wolny i wielokrotny modyfikować układ stero-
wania silnika. Obciążeniem dla badanego sil-
nika jest hamownica. Zadawanie momentu ob-
ciążenia co do wartości i rodzaju również reali-
zowane
przez
układ
sterowania
(karta
DS 1104).Uzyskane dane pomiarowe oraz
wszystkie informacje określające własności ba-
danego napędu są rejestrowane jest poprzez
kartę pomiarową. Nadrzędną jednostką stano-
wiska jest komputer, który umożliwia komuni-
kowania się z układem sterowania jak i pomia-
rowym.
4.1 Wyniki eksperymentu
Na poniższych rysunkach przedstawiono prze-
biegi prędkości oraz momentu silnika zareje-
strowane w układzie pomiarowym (rys. 8). Do
pomiaru prędkości wykorzystano jeden z sy-
gnałów z czujnika położenia wirnika. Na ry-
sunku (rys. 9) przedstawiono przebieg prędko-
ści silnika (bieg jałowy) zarejestrowany dla
skokowej zmiany prędkości zadanej z 0,6
ω
n
do
zera i odwrotnie.
Rys. 9. Przebieg prędkości silnika dla skokowej
zmiany prędkości zadanej (bieg jałowy)
Na pozostałych dwóch rysunkach przedsta-
wiono przebiegi zarejestrowane dla stanu ob-
ciążenia. Dla skokowej zmiany wielkości zada-
nej (rys. 10) widoczna jest różnica w działaniu
regulatora adaptacyjnego. Dla małych prędko-
ści działanie regulatora jest gorsze (wartość
wzmocnienia proporcjonalnego jest funkcją
prędkości) niż dla dużych prędkości obroto-
wych.
Rys. 10. Przebieg prędkości i momentu silnika
dla skokowej zmiany prędkości zadanej
Natomiast na rysunku 11 przedstawiono prze-
bieg prędkości i momentu rozwijanego przez
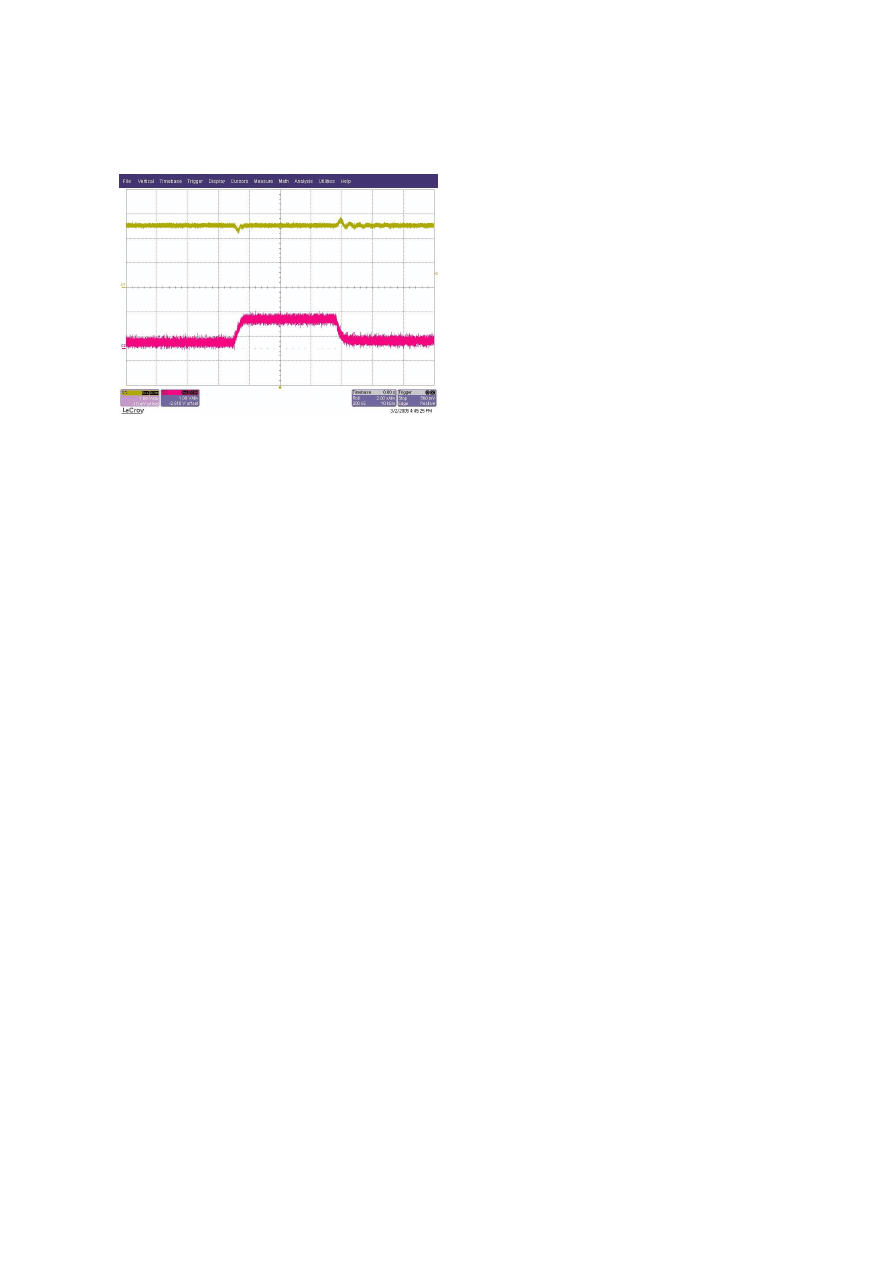
Zeszyty Problemowe – Maszyny Elektryczne Nr 72/2005
154
silnik gdy w układzie wystąpiła skokowa
zmiana momentu obciążenia.
Rys. 10. Przebieg prędkości i momentu silnika
dla skokowej zmiany momentu obciążenia
6. Podsumowanie. Wnioski końcowe
Z przeprowadzonych badań symulacyjnych
i eksperymentalnych wynika, że jest możliwe
zastosowania czujnika(ów) położenia wirnika w
układach regulacji prędkości. Wymaga to jed-
nak zastosowania regulatora adaptacyjnego,
którego sygnał wyjściowy uzależniony jest od
prędkości obrotowej.
Wadą takiej metody pomiaru prędkości jest
wzrost tętnień napięcia wyjściowego przetwor-
nika częstotliwość – napięcie (PCN) dla małych
prędkości obrotowych. Możliwa jest również
sytuacja, w której dla bardzo małych prędkości
obrotowych układ regulatora adaptacyjnego nie
będzie działał, ze względu na bardzo małe
wzmocnienie.
Dla prędkości większych od 0,2 prędkości
znamionowej działanie układu regulacji jest za-
dawalające.
7. Literatura
[1]. Hetmańczyk J., Domoracki A., Krykowski K.:
3,6 kW DC brushless motor control system - the in-
fluence of position sensors fault on motion proper-
ties. Electrical Drives and Power Electronics -
EDEP, The High Tatras, Słowacja 2003.
[2]. Hetmańczyk J., Domoracki A., Krykowski K.:
Nowoczesne stanowisko laboratoryjne do badań na-
pędów z bezszczotkowymi silnikami prądu stałego.
Zeszyty problemowe - BOBREM Komel - Maszyny
elektryczne Nr 66, Katowice 2003.
[3]. Krykowski K., Hetmańczyk J.: Wykorzystanie
czujników położenia wirnika w obwodzie regulacji
prędkości silnika PM BLDC. XIV Seminarium
Techniczne BOBRME - Komel 2005.
[4]. Pułaczewski J.
:
Dobór nastaw regulatorów
przemysłowych. WNT, Warszawa 1966.
[5]. Tunia K., Kaźmierkowski M.:
Automatyka na-
pędu przekształtnikowego.
PWN. Warszawa 1987.
Autorzy
Politechnika Śląska w Gliwicach,
Wydział Elektryczny, Katedra Energoelektro-
niki, Napędu Elektrycznego i Robotyki,
ul. B. Krzywoustego 2, 44-100 Gliwice.
mgr inż. Janusz Hetmańczyk
tel.: (32) 237-18-31
e-mail: janusz.hetmanczyk@polsl.pl
dr hab. inż. Krzysztof Krykowski, prof. Pol. Śl.
tel.: (32) 237-10-43, fax.: (32) 237-13-04;
e-mail: krzysztof.krykowski@polsl.pl
Wyszukiwarka
Podobne podstrony:
BADANIA SYMULACYJNE STEROWANIA Nieznany
lab 4, Demodulacja CFSK, kanał jednodrogowy. Badania symulacyjne, AKADEMIA MORSKA W GDYNI
BADANIE UKLADU REGULACJI CIAGLE Nieznany (2)
Badania operacyjne wyklad 2 id Nieznany
badania operacyjne 3 id 76767 Nieznany (2)
24 Badanie czwornikow id 30562 Nieznany
01 badanie sieci 3fid 3055 Nieznany (2)
4 Badanie kinetyki reakcji zmy Nieznany (2)
Badanie podstawowych ukladow cy Nieznany (2)
badania operacyjne poss intro i Nieznany (2)
Badania rynku w procesie ubiega Nieznany (2)
badania spoleczne id 76697 Nieznany
Badania w zakresie obrobki skra Nieznany
Badania Marketingowe id 76354 Nieznany
03 Badanie obwodow pradu staleg Nieznany (2)
Badania operacyjne, zadanie id Nieznany (2)
więcej podobnych podstron