
2.Analiza kinematyczna mechanizmu:
Dla tego mechanizmu założyłem przyspieszenie członu napędzającego:
a
=20mm/ s
2
W związku z tym prędkość będzie się zmieniać w funkcji czasu zgodnie ze wzorem:
v
=a⋅t=20⋅t mm /s
Przemieszczenie członu napędzającego wyniesie:
x
=
a
⋅t
2
2
=
20
⋅t
2
2
=10⋅t
2
mm
Podczas analizy mechanizmu metodą grafo-analityczną badam parametry członów oraz
punktów charakterystycznych mechanizmu w chwili
t
=5s
.
Dla tej chwili:
a
=20mm/ s
2
v
=100mm / s
x
=250mm
,gdzie x jest odległością punktu A od początku przyjętego układu współrzędnych, natomiast
początkowa prędkość członu napędzającego jest równa zero.
Plan prędkości w mechanizmie:
V
A
– znany kierunek, znana wartość
V
B2B1
-znany kierunek, nieznana wartość
V
B
– znany kierunek, szukana wartość
V
C
=V
B
V
D
=V
C
=V
B
Plan prędkości został wykreślony przy użyciu pakietu oprogramowania AutoCad2002
LT
Na podstawie następującego równania wektorowego:
V
B
=
V
B2B1
V
B1
Dzięki temu nie było nawet konieczne wprowadzanie podziałki.

Plan przyspieszeń przedstawia się analogicznie do planu prędkości ponieważ nie
występuje tu żaden ruch obrotowy.
Plan przyspieszeń w mechanizmie:
a
A
– znany kierunek, znana wartość
a
B2B1
-znany kierunek, nieznana wartość
a
B
– znany kierunek, szukana wartość
a
C
=a
B
a
D
=a
C
=a
B
Plan został zrealizowany na podstawie następującego równania:
a
B
=
a
B2B1
a
B1
Wyznaczone przez program AutoCad wartości odpowiednich prędkości i przyspieszeń
mogą być obarczone błędem zaokrągleń przyjętych przez program, jednak błąd ten jest małego
rzędu.
Wyznaczenie przyspieszeń i prędkości metodą analityczną.
Metoda analityczna pozwala na wyznaczenie prędkości w dowolnej chwili czasu, a nie
tylko w danym położeniu mechanizmu.
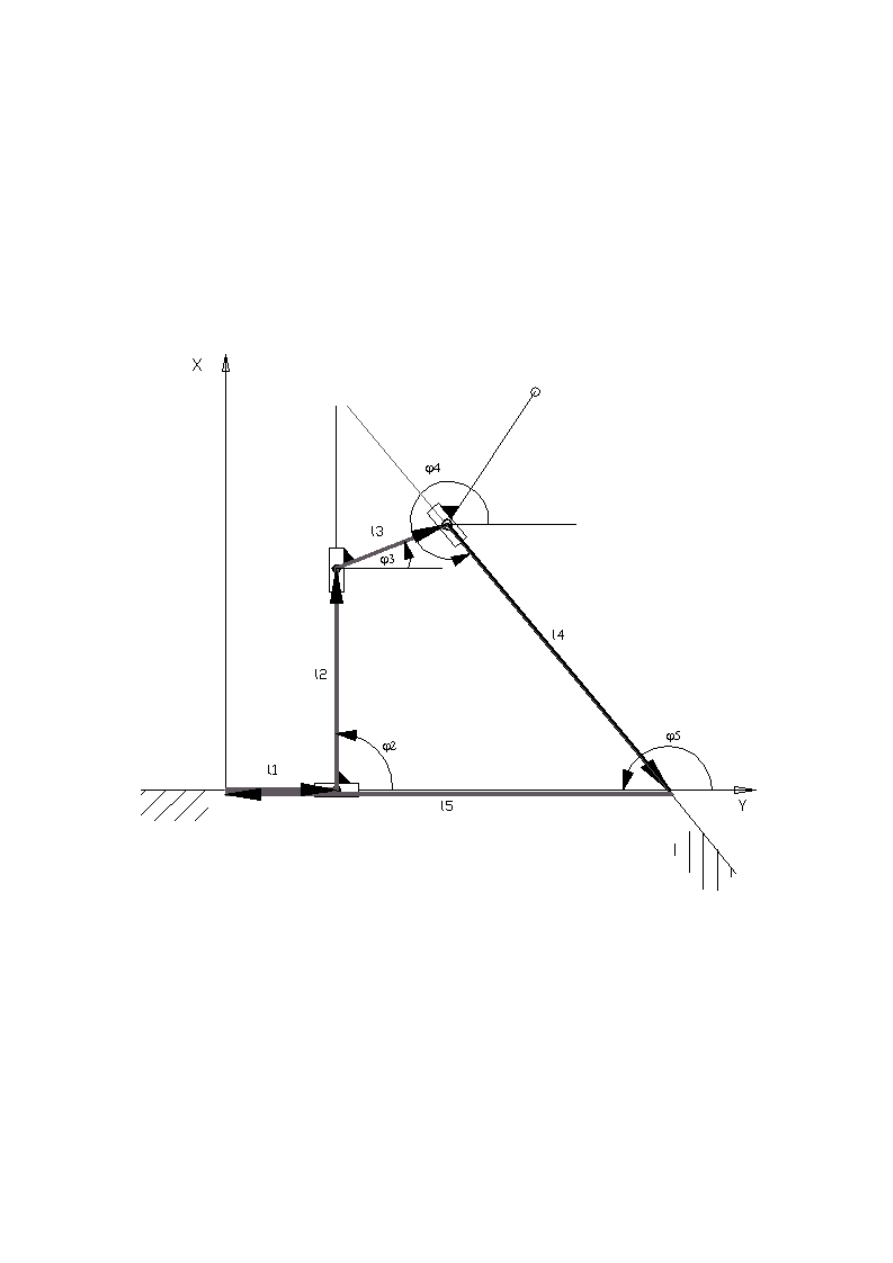
Wrysowując w mechanizm zamknięty wielobok wektorowy otrzymuję równania rzutów
poszczególnych wektorów na osie przyjętego układu współrzędnych.
Długości poszczególnych wektorów
l
1
t=10⋅t
2
l
2
t=?
l
3
t=269,2 mm=const
l
4
t =?
l
5
t=1008,4 mm=const
wartości kątów:
1
=0
o
2
=90
o
3
=22
o
4
=310
o
Dwa równania rzutów wektorów na osie pozwolą na wyznaczenie niewiadomych
l
2
oraz
l
4
ponieważ jest to układ dwóch równań z dwiema niewiadomymi.
l
1
l
2
l
3
l
4
l
5
=0
⇒
Rzut na oś odciętych OX:
l
1
l
3
⋅cos
3
l
4
⋅cos
4
– l
5
=0
⇒
Rzut na oś odciętych OY:
l
2
l
3
⋅sin
3
l
4
⋅sin
4
=0
Z pierwszego równania mogę bezpośrednio wyznaczyć długość wektora
l
4
:
l
4
=
l
5
– l
1
t – l
3
⋅cos
3
cos
4
Teraz na podstawie równania drugiego wyznaczam długość
l
2
:
l
2
=−l
3
⋅sin
3
– l
4
⋅sin
4
V
B
=
dl
4
dt
=−
dl
1
dt
⋅
1
cos
4
V
B2B1
=
dl
1
dt
⋅
sin
4
cos
4
a
B
=
d
2
l
4
dt
2
=−
d
2
l
1
dt
2
⋅
1
cos
4
a
B2B1
=
d
2
l
2
dt
2
=
d
2
l
1
dt
2
⋅
sin
4
cos
4
Po wstawieniu odpowiednich wartości dla chwili czasu t=5s otrzymuję następujące wyniki:
V
B
=−155,57 mm/ s
V
B2B1
=−119,17 mm/s
a
B
=−31,11 mm/ s
2
a
B2B1
=−23,83 mm/s
2
Wyniki niewiele różnią się od tych ktore otrzymałem w metodzie analityczno
wykreślnej.
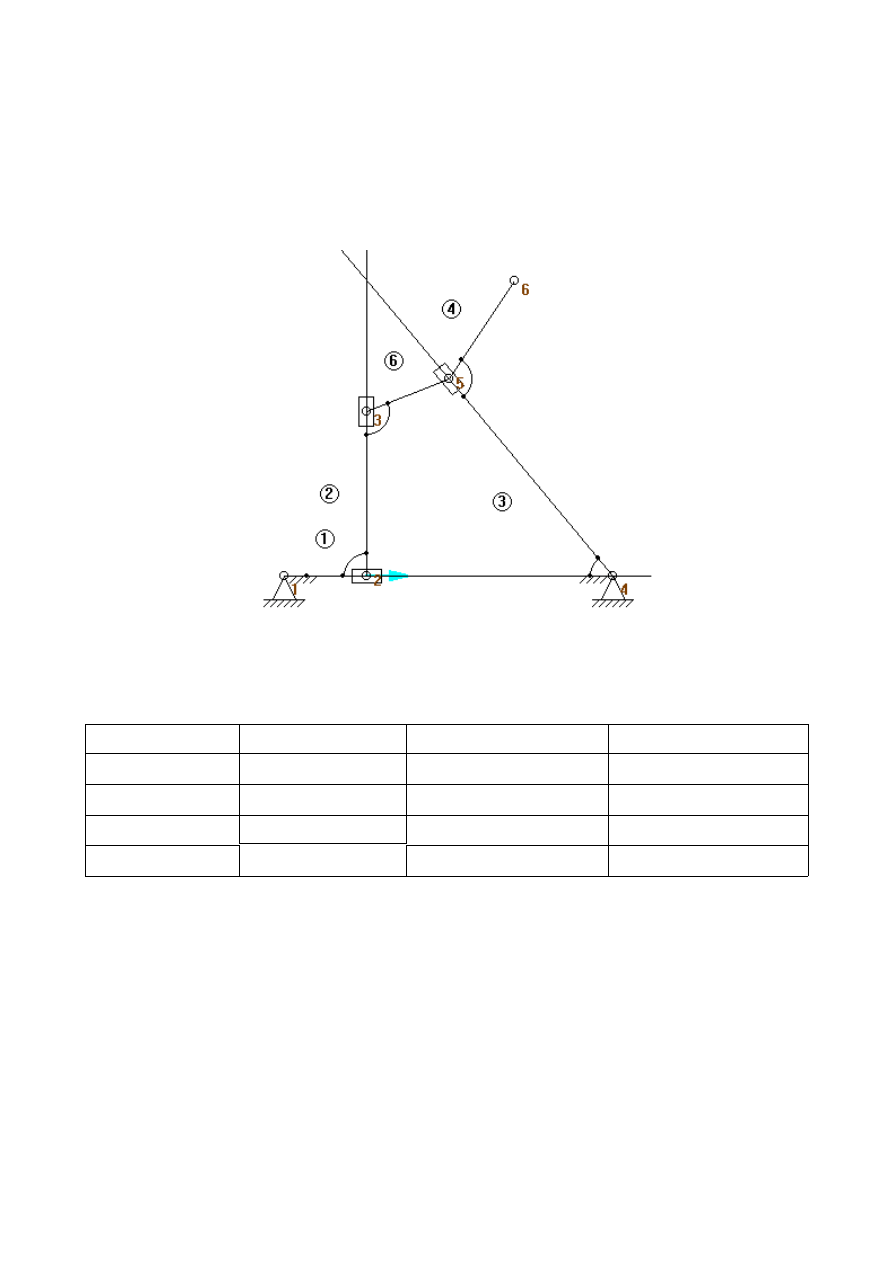
Dodatkowo wykonana symulacja w programie SAM 4.2 potwierdza poprawność
wyników
Model mechanizmu w programie SAM 4.2
Podsumowanie wyników:
SAM 4.2
m. analityczno wykreślna
m. analityczna
V
B
156mm/s
155,57 mm
/ s
155,57 mm
/ s
V
B2B1
120mm/s
119,18 mm
/ s
119,17 mm
/ s
a
B
a
B2B1
-
-
31,11 mm
/ s
2
23,84 mm
/ s
2
31,11 mm
/ s
2
23,83 mm
/s
2
Wyszukiwarka
Podobne podstrony:
6B tmm2 kinemat
Wykł 1B wstępny i kinematyka
Wyklad 06 kinematyka MS
Wyklad 05 kinematyka MS
3 Rodzaje jednorodnych transformacji stosowanych w kinematy
04 Analiza kinematyczna manipulatorów robotów metodą macierz
Mechanika Techniczna I Skrypt 2 4 Kinematyka
03 Kinematyka
fizyka 2 KINEMATYKA PUNKTU MATERIALNEGO
kinematyka manipulatora
haccp 6b, - dietetyka, HACCP -, systemy zarzadzania jakoscia, haccp 1
Praca klasowa figury 6b, Matematyka, kl 6
kinematyka
zestaw 3 kinematyka
więcej podobnych podstron