„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
MINISTERSTWO EDUKACJI
NARODOWEJ
Stanisław Popis
Analizowanie działania urządzeń i systemów
mechatronicznych 725[03].Z1.02
Poradnik dla ucznia
Wydawca
Instytut Technologii Eksploatacji – Państwowy Instytut Badawczy
Radom 2007

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
1
Recenzenci:
mgr inż. Henryk Krystkowiak
mgr inż. Jerzy Kozłowicz
Opracowanie redakcyjne:
mgr inż. Stanisław Popis
Konsultacja:
mgr inż. Ryszard Dolata
Poradnik stanowi obudowę dydaktyczną programu jednostki modułowej 725[03].Z1.02
Analizowanie działania urządzeń i systemów mechatronicznych,
zawartego w programie
nauczania dla zawodu monter mechatronik.
Wydawca
Instytut Technologii Eksploatacji – Państwowy Instytut Badawczy, Radom 2007

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
2
SPIS TREŚCI
1.
Wprowadzenie
3
2.
Wymagania wstępne
4
3.
Cele kształcenia
5
4.
Materiał nauczania
6
4.1. Struktura i sposób działania urządzeń i systemów mechatronicznych
6
4.1.1. Materiał nauczania
6
4.1.2. Pytania sprawdzające
11
4.1.3. Ćwiczenia
12
4.1.4. Sprawdzian postępów
13
4.2. Urządzenia mechatroniczne powszechnego użytku
14
4.2.1. Materiał nauczania
14
4.2.2. Pytania sprawdzające
23
4.2.3. Ćwiczenia
24
4.2.4. Sprawdzian postępów
24
4.3. Maszyny manipulacyjne i roboty
25
4.3.1. Materiał nauczania
25
4.3.2. Pytania sprawdzające
54
4.3.3. Ćwiczenia
54
4.3.4. Sprawdzian postępów
56
4.4. Obrabiarki sterowane numerycznie
57
4.4.1. Materiał nauczania
57
4.4.2. Pytania sprawdzające
62
4.4.3. Ćwiczenia
62
4.4.4. Sprawdzian postępów
63
4.5. Specjalistyczne urządzenia mechatroniczne
64
4.5.1. Materiał nauczania
64
4.5.2. Pytania sprawdzające
70
4.5.3. Ćwiczenia
70
4.5.4. Sprawdzian postępów
71
5.
Sprawdzian osiągnięć
72
6.
Literatura
77
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
3
1. WPROWADZENIE
Poradnik będzie Ci pomocny w opanowaniu wiadomości oraz ukształtowaniu umiejętności
niezbędnych do analizowania działania urządzeń i systemów mechatronicznych.
W poradniku zamieszczono:
−
wymagania wstępne – wykaz wiadomości i umiejętności, jakie powinieneś mieć już
opanowane, abyś bez problemów mógł korzystać z poradnika,
−
cele kształcenia – wykaz wiadomości i umiejętności, jakie zdobędziesz i ukształtujesz po
zrealizowaniu zajęć,
−
materiał nauczania – wiadomości niezbędne do analizowania działania układów systemów
mechatronicznych, opisu funkcji urządzeń i układów mechatronicznych, wyjaśnienia budowy
i sposobu działania wybranych urządzeń mechatronicznych powszechnego użytku, rozpoznawania
układów manipulacyjnych i robotów oraz określania ich przeznaczenia, rozpoznawania zespołów
funkcjonalnych obrabiarek sterowanych numerycznie,
−
pytania sprawdzające, które pomogą sprawdzić, czy opanowałeś zakres materiału nauczania,
−
ćwiczenia, które umożliwią identyfikowanie zespołów funkcjonalnych urządzeń i systemów
mechatronicznych,
−
sprawdzian postępów – umożliwiający osobistą refleksję nad osiągniętym efektami,
−
sprawdzian osiągnięć – przykładowy zestaw zadań umożliwiający ocenę osiągniętego przez
Ciebie poziomu wiadomości oraz umiejętności.
Bardzo uważnie zapoznaj się z wiadomościami zawartymi w materiale nauczania mając
świadomość, że podane są one w formie skróconej. Nauczyciel wskaże Ci literaturę i inne
materiały, które pozwolą na rozszerzenie i lepsze opanowanie wiadomości.
Realizując ćwiczenia zaproponowane w Poradniku dla ucznia oraz przez nauczyciela
będziesz miał sposobność do weryfikacji wiedzy, jaką nabyłeś i zastosowania jej w praktyce.
Po wykonaniu ćwiczeń określ poziom swoich postępów rozwiązując sprawdzian postępów.
Sprawdzian osiągnięć, któremu będziesz poddany, pozwoli na określenie stopnia opanowania
przez Ciebie wiadomości i umiejętności określonych w jednostce modułowej „Analizowanie
działania urządzeń i systemów mechatronicznych”.
Schemat układu jednostki modułowych
725[03].Z1
Budowa urz
ądzeń i systemów mechatronicznych
725[03].Z1.01
Analizowanie dzia
łania układów i systemów sterowania
w urz
ądzeniach i systemach mechatronicznych

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
4
2. WYMAGANIA WSTĘPNE
Przystępując do realizacji programu jednostki modułowej powinieneś umieć:
−
stosować podstawowe jednostki miar układu SI,
−
wyjaśnić zasadę obróbki skrawaniem: toczenia i frezowania,
−
rozpoznawać strukturę urządzeń i systemów mechatronicznych,
−
analizować działanie układów elektrycznych,
−
analizować działanie układów pneumatycznych i elektropneumatycznych,
−
analizować działanie układów hydraulicznych i elektrohydraulicznych,
−
obsługiwać komputer na poziomie podstawowym,
−
korzystać z różnych źródeł informacji,
−
poszukiwać informacji w Internecie,
−
posługiwać się normami, katalogami,
−
uczestniczyć aktywnie w dyskusji,
−
przygotowywać i realizować prezentacje,
−
stosować rόżne metody i środki porozumiewania się w zakresie zagadnień technicznych (symbole,
rysunki, zdjęcia, itp),
–
stosować ogόlne zasady bezpieczeństwa i higieny pracy w czasie eksploatacji maszyn i urządzeń,
–
charakteryzować zagrożenia dla środowiska wynikające z eksploatacji maszyn i urządzeń
technicznych,
– charakteryzować zagrożenia pożarowe wynikające z eksploatacji maszyn i urządzeń
technicznych.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
5
3. CELE KSZTAŁCENIA
W wyniku realizacji programu jednostki modułowej powinieneś umieć:
– określić przeznaczenie urządzenia lub systemu mechatronicznego,
– scharakteryzować moduły, podzespoły i elementy występujące w urządzeniach i systemach
mechatronicznych,
– określić współdziałanie modułów w wybranym urządzeniu lub systemie mechatronicznym,
– posłużyć się dokumentacją techniczną podczas określania struktury urządzenia lub systemu
mechatronicznego,
– wyjaśnić zasadę działania wybranych urządzeń mechatronicznych powszechnego użytku
(komputera, kamery wideo, sprzętu AGD),
– rozpoznać układy manipulacyjne i określić ich przeznaczenie,
– wyjaśnić budowę manipulatora i robota,
– rozpoznać zespoły funkcjonalne obrabiarki sterowanej numerycznie,
– wyjaśnić zasadę działania wybranych urządzeń specjalistycznych,
– rozpoznać strukturę i wyjaśnić zasadę działania wybranego systemu mechatronicznego,
– skorzystać z różnych źródeł informacji dotyczących budowy i przeznaczenia urządzeń
i systemów mechatronicznych,
– zastosować zasady bezpieczeństwa i higieny pracy oraz ochrony przeciwpożarowej
i ochrony środowiska na stanowisku pracy.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
6
4.
MATERIAŁ NAUCZANIA
4.1. Struktura i sposób działania urządzeń i systemów
mechatronicznych
4.1.1. Materiał nauczania
Urządzenia mechatroniczne są zintegrowanymi zespołami elementów składowych
i podzespołów spełniających różne funkcje, działających na różnych zasadach fizycznych
i wykorzystujących różne zjawiska. Ich głównym zadaniem jest realizowanie czynności
mechanicznych: przemieszczania obiektów, wywierania nacisku (siły), realizowania procesu
obróbki). Mają możliwość reagowania na bodźce zewnętrzne docierające do urządzenia poprzez
system czujników. Pomiędzy czujnikami a elementami wykonawczymi znajdują się układy
przetwarzania i analizy sygnałów, jak również element decyzyjny wyposażony w odpowiedni
program działania urządzenia.
Urządzenie mechatroniczne łączą w sobie konstrukcje mechaniczne, czujniki różnorodnych
wielkości
fizycznych (parametrów istotnych dla realizowanego zadania), systemy
przekazywania przetwarzania i interpretacji sygnałów i informacji, układy napędowe.
Charakteryzuje je synergia, czyli możliwość uzyskiwania lepszych efektów pracy niż suma
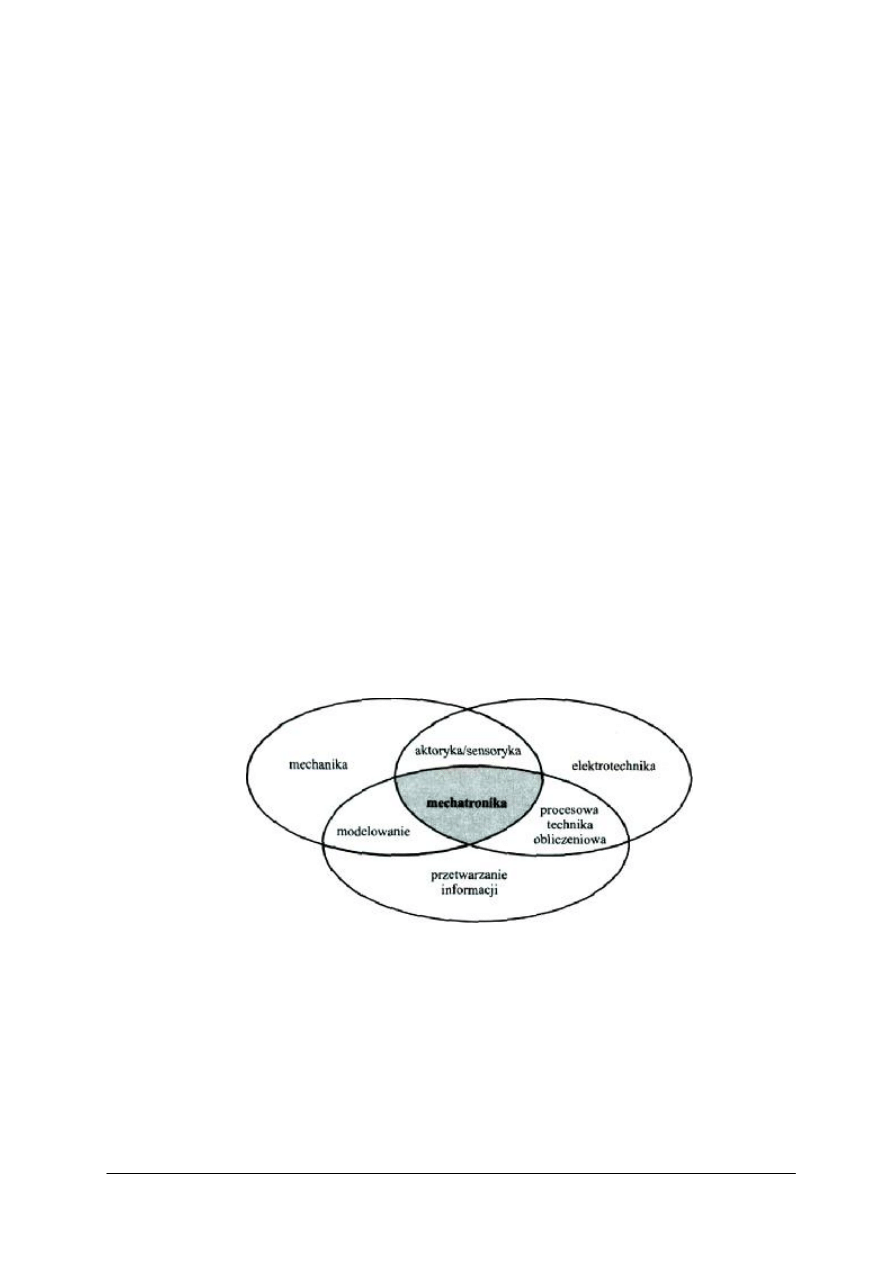
możliwości elementów składowych. Mechatronika jest dziedziną interdyscyplinarną integrującą
mechanikę, budowę maszyn, automatykę, elektrotechnikę, elektronikę i informatykę (rys.1).
Istotną cechą urządzeń mechatronicznych jest zdolność do wiernego przetwarzania
i przekazywania,
informacji
(w
formie
sygnałów
mechanicznych,
elektrycznych,
pneumatycznych, optycznych i innych) przy jednoczesnym wysokim stopniu automatyzacji tych
urządzeń. Systemy mechatroniczne wyposażone są w czujniki zbierające sygnały ze swojego
otoczenia, programowalne układy przetwarzania i interpretacji tych sygnałów oraz zespoły
komunikacyjne i urządzenia wykonawcze oddziałujące odpowiednio na otoczenie.
Rys. 1
.
Części składowe mechatroniki
[4, s.132]
Urządzenia mechatroniczne charakteryzują się:
−
multifunkcjonalnością – łatwością realizacji różnych zadań przez jedno urządzenie,
np. przez zmianę oprogramowania,
−
inteligencją – oznaczającą możliwość podejmowania decyzji i komunikacji z otoczeniem,
−
elastycznością – łatwością modyfikacji konstrukcji na etapie projektowania, produkcji oraz
eksploatacji urządzenia, np. przez zastosowanie konstrukcji modułowej,
−
możliwością niewidocznego dla operatora sposobu działania, co wymaga zastosowania
interfejsu użytkownika dla komunikowania się z operatorem.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
7
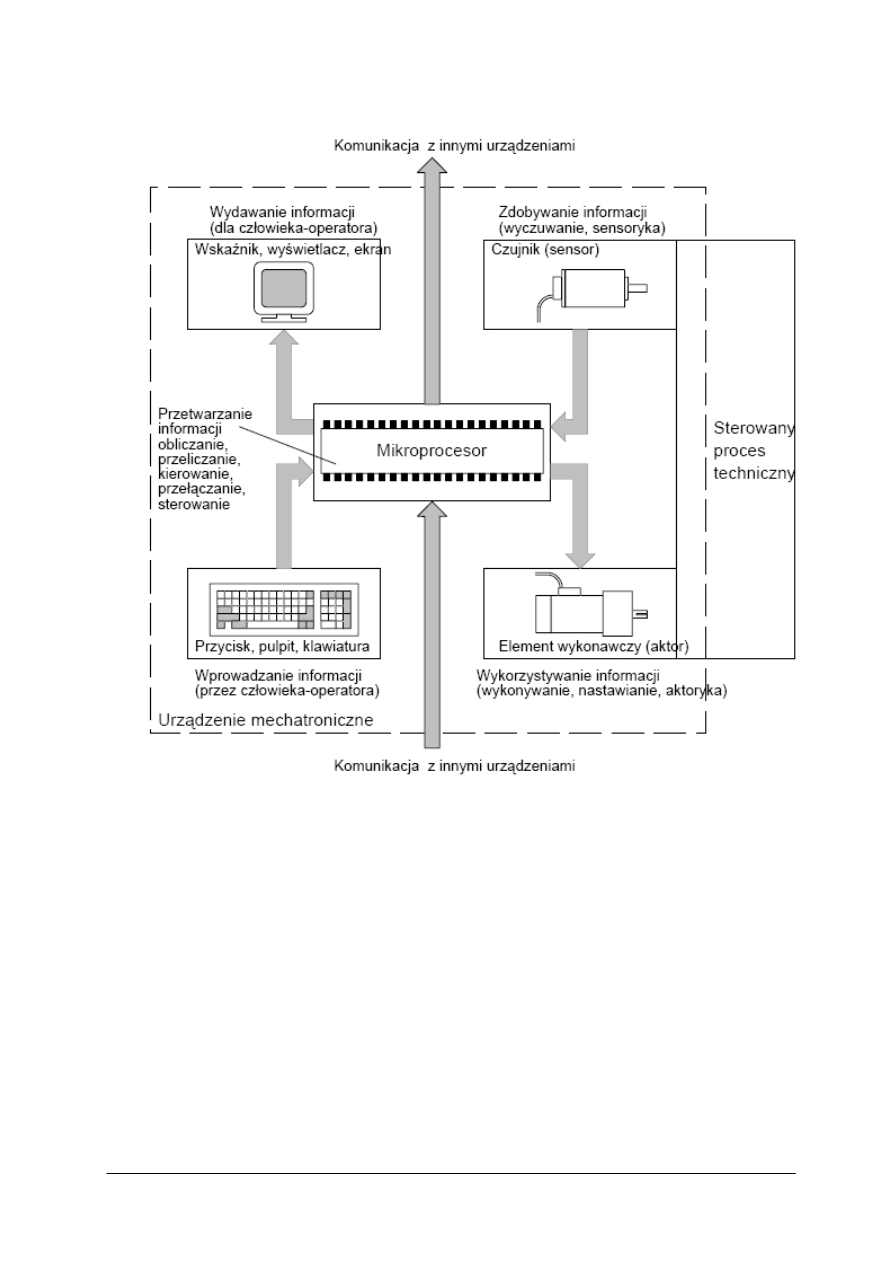
Rys. 2. Struktura urządzenia mechatronicznego [3, s.28]
Urządzenie mechatroniczne (rys. 2) składa się z trzech niezbędnych, podstawowych grup
elementów:
−
elementów wykonawczych (aktorów), za których pomocą urządzenie aktywnie oddziałuje na
otoczenie, czyli bezpośrednio ingeruje (nastawia) w sterowany proces techniczny; są to
głównie elementy mechaniczne,
−
czujników (sensorów), za których pomocą urządzenie zdobywa niezbędne informacje
o procesie; elementy te w swojej pracy wykorzystują technikę pomiarów,
−
przetworników informacji (procesorów), za których pomocą urządzenie odpowiednio
przetwarza (oblicza, kieruje, przełącza) informacje; są to elementy techniki komputerowej.
W urządzeniu mechatronicznym znajdziemy elementy; mechaniki, elektroniki, techniki
sterowania, technologii komputerowej, informatyki i wielu innych dziedzin.
Elementy wykonawcze i sterujące mogą być mechaniczne, elektryczne, pneumatyczne lub
hydrauliczne.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
8
Mechaniczne urządzenia sterujące mogą realizować dokładne przemieszczenia wykonywane
z dużymi prędkościami. Sterowanie jest dokładne, działa bez opóźnień, lecz często koszt jego
wykonania jest znaczny.
Przykładem sterowania mechanicznego jest układ rozrządu silnika spalinowego, który służy
do otwierania i zamykania zaworów. Elektrycznymi elementami wykonawczymi są: silniki
prądu przemiennego, silniki prądu stałego, silniki krokowe oraz urządzenia wykonawcze
zbudowane na bazie elektromagnesów. Do hydraulicznych i pneumatycznych elementów
wykonawczych należą siłowniki oraz silniki. Hydrauliczne elementy robocze charakteryzują się
zdolnością do bardzo szybkiej reakcji oraz posiadają małe wymiary gabarytowe na jednostkę
mocy, jednak koszt ich wykonania jest duży i powiększony jeszcze o koszt wykonania układu
zasilania. Pneumatyczne elementy wykonawcze są tańsze od hydraulicznych lecz również
wymagają osobnego źródła zasilania (sprężone powietrze), a ponadto siły i momenty
uzyskiwane na nich są stosunkowo małe. Silniki elektryczne, ze względu na dużą różnorodność
konstrukcji i cech eksploatacyjnych, są powszechnie stosowane, lecz wadą większości z nich jest
duża bezwładność wirnika utrudniająca precyzyjne zatrzymanie i powodująca trudny rozruch
(przy większych mocach). Tak więc w urządzeniach mechatronicznych możemy spotkać
wszystkie rodzaje napędów.
Nieco inna sytuacja jest w układach sterujących. W zasadzie można spotkać również i w tej
dziedzinie zarówno sterowanie mechaniczne, elektryczne, pneumatyczne i hydrauliczne jednak
zdecydowanie dominuje tu sterowanie elektryczne i elektroniczne.
Sterowanie elektryczne jest najbardziej popularne z następujących powodów:
−
możliwość przekazywania sygnałów na duże odległości,
−
łatwość obróbki sygnału,
−
możliwość zastosowania sterowania elektronicznego,
−
możliwość współpracy układu sterującego z różnymi rodzajami sensorów,
−
łatwość współpracy układu z systemami komputerowymi możliwość tworzenia złożonych
systemów sterujących.
Cechą charakterystyczną urządzenia mechatronicznego jest rozbudowane przekazywanie
informacji do systemu, z systemu lub wewnątrz systemu. Stanowi podstawę do symulowania
inteligencji, czemu towarzyszy rozszerzenie „mądrości” systemu.
Sensory
Czujniki – wykorzystywane w maszynach – odpowiadają zmysłom człowieka.
Są elementami, które dostarczają informacji o stanie samej maszyny i jej otoczenia.
Na podstawie tej informacji mikroprocesor określa działania maszyny. Czujniki w urządzeniach
mechatronicznych mierzą wielkości sterowane, sterujące, zakłócające itp.
Najważniejsze wielkości mechaniczne mierzone w układach mechatronicznych to:
−
położenie (pozycja),
−
przemieszczenie,
−
sztywność,
−
podatność,
−
prędkość,
−
masa,
−
gęstość,
−
przyspieszenie,
−
natężenie przepływu,
−
siła,
−
moment,
−
kształt,
−
chropowatość,
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
9
−
naprężenie,
−
ciśnienie,
−
lepkość,
−
odkształcenie,
−
inne (akustyczne/ponaddźwiękowe).
Z punktu widzenia mechatronizacji napędów mechanicznych szczególną rolę odgrywają
sensory pozycji (położenia, drogi, przemieszczenia), mniejszą – sensory prędkości i sensory
obecności. Sensory pozycji elementu wykonującego ruch obrotowy nazywane są czujnikami
obrotu, czujnikami kąta, resolwerami czy enkoderami. Mierzą one drogi, długości, kąty
i położenia. Sensorami prędkości są zwykle prądnice tachometryczne. Mierzą one prędkość
kątową i liczbę obrotów. Wielkości te mogą być łatwo uzyskiwane podczas obróbki sygnału
sensorów położenia kątowego. Dlatego sensory te odgrywają rolę podstawową. Sensory
obecności nazywane są zwykle wyłącznikami zbliżeniowymi czy magnetycznymi, a niekiedy
sensorami binarnymi, ponieważ służą tylko do wykrywania i rozróżniania stanu systemu
w sensie odpowiedzi tak/nie, jest/nie ma, obecny/nieobecny itp.
Aktory
Aktor (ang. actuator, niem. Aktor, franc. actionneur) jest elektronicznie sterowanym
członem wykonawczym. Jest on łącznikiem między urządzeniem przetwarzającym informacje
(mikroprocesorem) i procesem, którego parametry trzeba zmienić (nastawić). Za pomocą
aktorów można nastawiać w określony sposób strumienie energii, przepływy masy. Wielkością
wyjściową aktorów jest zwykle energia lub moc mechaniczna (człony z niemechaniczną
energią/mocą wyjściową, np. półprzewodniki mocy, mogą być również zaliczane do aktorów).
Aktory przetwarzają analogowe lub cyfrowe sygnały urządzeń sterowniczych w mechaniczne
wielkości wejściowe (drogę, siłę, kąt, moment obrotowy). Poziom mocy wielkości wyjściowych
przekracza sygnał wejściowy. Potrzebne do tego wzmocnienie mocy jest osiągane na drodze
elektrycznej, hydraulicznej lub pneumatycznej.
W zależności od energii pomocniczej można stosować różne zasady nastawiania i budować
różne aktory. Można je podzielić na: elektromechaniczne, hydrauliczne i pneumatyczne oraz
niekonwencjonalne (rys. 3).
aktory
elektromechaniczne
aktory płynowe
aktory
o koncepcjach alternatywnych
silnik prądu stałego
silnik prądu przemiennego
silnik krokowy
elektromagnes
silnik liniowy
aktor hydrauliczny
aktor pneumatyczny
koncepcje piezoelektryczne
koncepcje magnetostrykcyjne
aktor elektrochemiczny
aktor termobimetaliczny
aktor z metalem z „pamięcią”
Rys. 3. Rodzaje aktorów. [3, s.56]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
10
Tabela 1. Porównanie własności elementów wykonawczych.
Rodzaj elementu (napędu)
Własność
elektryczny
pneumatyczny
hydrauliczny
Rodzaj wykonywanego
ruchu
Obrotowy, rzadko liniowy
Liniowy oraz obrotowy
Liniowy oraz obrotowy
Zakres prędkości ruchu
Prędkość obrotowa 600 – –
3000 min
– 1
,
Prędkość liniowa do 10 m/s
Prędkość obrotowa do
105000 min
– 1
, prędkość
liniowa 0,5 – 1,5 m/s,
w wykonaniach
specjalnych do 30 m/s
Prędkość obrotowa do
3000 min
– 1
, prędkość
liniowa do 1,5 m/s,
możliwość uzyskiwania
bardzo małych prędkości
Zakres przesunięć
liniowych
Bez ograniczeń
Do 1 m, siłowniki
beztłoczyskowe do 5 m
Do 1,5 m, siłowniki
teleskopowe do 15 m
Sterowanie prędkością
Skomplikowane sterowania
metodami elektrycznymi
lub elektronicznymi
Proste nastawianie
za pomocą elementów
dławiących przepływ
powietrza
Szerokie możliwości
sterowania prędkością
za pomocą elementów
dławiących lub zmiany
wydajności pomp
Bezpieczeństwo pracy w
atmosferach wybuchowych
Wymagane zabezpieczenie
przeciwiskrowe
Całkowicie bezpieczne
Nie stosuje się specjalnych
zabezpieczeń, stosowanie
cieczy niepalnych lub
trudnopalnych
Pewność eksploatacji,
łatwość obsługi
Duża usterkowość,
wymagane wysokie
kwalifikacje personelu
Duża niezawodność
i trwałość, średni poziom
kwalifikacji personelu
Duża trwałość i pewność
działania, prosta obsługa,
średni poziom kwalifikacji
personelu
Praca w warunkach
zawilgocenia
Konieczne wykonanie
specjalnych obudów
Odporne na wilgoć
Bardzo odporne na
zawilgocenei środowiska
pracy
Wprowadzane zagrożenia
Możliwość porażenia
prądem elektrycznym
Nieszkodliwe, niekiedy
możliwy wypływ
sprężonego powietrza
Możliwy wypływ cieczy
roboczej, zanieczyszczenie
środowiska
Mechatroniczny system nastawczy
Wymaganie, które powinien spełniać aktor, to duża dokładność nastawiania
(pozycjonowania) przy dobrej dynamice nastawiania (wykonywania szybkich i dokładnie
pozycjonujących ruchów nastawczych). Czynnikami, które ograniczają jakość regulacji prawie
wszystkich typów aktorów, są:
−
tarcie i straty w przekładniach mechanicznych i prowadnicach,
−
efekty histerezy i nasycenia w określonych materiałach,
−
nieliniowe statyczne charakterystyki,
−
zmiana zachowania się procesu wskutek zmienności punktu pracy parametrów obiektu
regulowanego lub czynników zewnętrznych, takich jak: zużycie, starzenie,
−
temperatura, wahania energii pomocniczej.
Czynniki te można wyeliminować lub skompensować przez zastosowanie nowoczesnej
mikroelektroniki. Pożądane przy tym powiązanie napędu nastawczego, komputera
oprogramowania nazywane jest dalej mechatronicznym systemem nastawczym.
Nowoczesne aktory ułatwiają nadzór i diagnozę, zarówno siebie samego jak i całego
urządzenia mechatronicznego. Jest to zintegrowana jednostka funkcjonalna, charakteryzująca się
tym, że strumień siły jest, tak jak dotychczas, przejmowany przez elementy mechaniczne,
przepływ zaś informacji następuje na drodze elektronicznej.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
11
Napęd mechatroniczny
Napęd mechatroniczny składa się zwykle z silnika elektrycznego, reduktora o dużym
przełożeniu (>> 10:1), elektroniki cyfrowej, elektroniki mocy oraz z oprogramowania
komputerowego. To ostatnie obejmuje pliki do opisu dynamicznego zachowania się regulatora,
elektroniki mocy i mechaniki reduktora. Synchronizacja ruchów w różnych zespołach maszyny,
zapewniana dotychczas przez sztywne mechaniczne połączenie wałów napędowych tych
zespołów, może zostać zastąpiona synchronizacją elektroniczną. Korzyści z tego wynikające
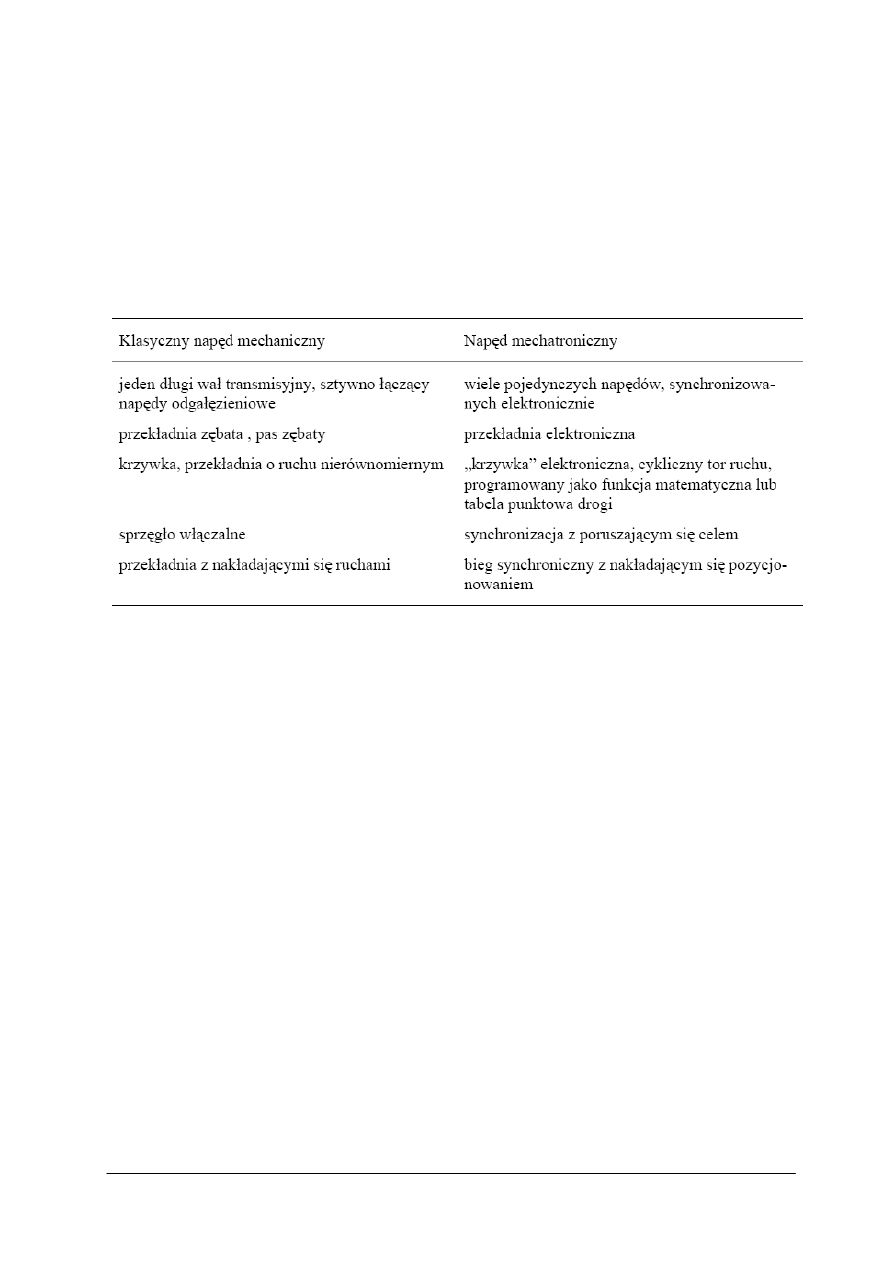
przedstawia tab. 2.
Tabela 2. Porównanie własności napędów mechanicznych i mechatronicznych [3, s. 78]
Modułowość budowy
Systemy mechatroniczne stają się coraz bardziej złożone. Rozwiązaniem problemów
wiążących się z budową i eksploatacją złożonych systemów mechatronicznych jest modułowość
(budowa modułowa). Chodzi tu o podejście oparte na modułach mechatronicznych. Moduły
obudowane i spełniające jasno określone funkcje, są integrowane w podsystemy i systemy.
Modułowość ułatwia konstruowanie, symulację czy testowanie, jak też utrzymywanie stanu
technicznego urządzenia i systemu mechatronicznego.
4.1.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Czym charakteryzują się urządzenia mechatroniczne ?
2. Jaka jest struktura funkcjonalna urządzeń mechatronicznych?
3. Dlaczego w urządzeniach mechatronicznych najczęściej stosowane jest sterowanie
elektryczne?
4. Jaki jest cel stosowania sensorów w urządzeniach mechatronicznych?
5. Jaka jest zasada pracy aktorów w urzadzeniach mechatronicznych?
6. Co to jest mechatroniczny system nastawczy?
7. Na czym polega modułowość budowy urządzeń mechatronicznych?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
12
4.1.3. Ćwiczenia
Ćwiczenie 1
Element napędowy urządzenia mechatronicznego powinien spełniać następujące warunki:
−
praca w warunkach zawilgocenia,
−
możliwość wykonywania bardzo powolnych ruchów liniowych,
−
trwałość, prosta obsługi,
−
możliwość łatwej zmiany prędkości ruchu.
Dobierz odpowiedni rodzaj elementu napędowego.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z informacjami zawartymi w rozdziale 4.1. Poradnika dla ucznia,
2) określić rodzaj elementu napędowego,
3) zapisać w karcie sprawozdania z ćwiczenia uzasadnienie doboru napędu,
4) przedstawić wyniki pracy w formie prezentacji.
Wyposażenie stanowiska pracy:
−
literatura zgodna z rozdziałem 6 Poradnika dla ucznia,
−
arkusz papieru formatu A4,
−
przybory do pisania,
−
materiały do pracy metodą przewodniego tekstu.
Ćwiczenie 2
Scharakteryzuj strukturę wybranego urządzenia mechatronicznego.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z informacjami zawartymi w rozdziale 4.1. Poradnika dla ucznia,
2) przeprowadzić dyskusje z kolegami,
3) narysować w karcie sprawozdania z ćwiczenia schemat struktury urządzenia
mechatronicznego oraz opisać funkcje poszczególnych składników jego struktury,
4) przedstawić wyniki pracy w formie prezentacji.
Wyposażenie stanowiska pracy:
−
literatura zgodna z rozdziałem 6 Poradnika dla ucznia,
−
arkusz papieru formatu A4,
−
przybory do pisania,
−
materiał do pracy metodą przewodniego tekstu.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
13
4.1.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) wyjaśnić na czym polega interdyscyplinarność mechatroniki?
2) scharakteryzować cechy urządzeń i systemów mechatronicznych?
3) scharakteryzować napędy stosowane w urządzeniach
mechatronicznych?
4) wyjaśnić rolę elementów wykonawczych w urządzeniach
mechatronicznych?
5) scharakteryzować własności sterowania elektrycznego w
urzadzeniach mechatronicznych?
6) wyjaśnić przeznaczenie sensorów stosowanych w urządzeniach
mechatronicznych
7) wyjaśnić zasadę działania aktorów w urządzeniach i systemach
mechatronicznych?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
14
4.2. Urządzenia mechatroniczne powszechnego użytku
4.2.1. Materiał nauczania
Z urządzeniami mechatronicznymi mamy do czynienia bardzo często. Codziennie przecież
korzystamy z komputera i drukarki, cyfrowego aparatu fotograficznego i kamery wideo, pralki,
suszarki i wielu innych urządzeń. Do podstawowych urządzeń mechatronicznych można
zaliczyć: drukarki laserowe lub atramentowe, kserokopiarki nowej generacji, odtwarzacze CD
i wiele mikromaszyn; sterowane cyfrowo maszyny do szycia i maszyny dziewiarskie,
elektronicznie sterowany silnik spalinowy, systemy przeciwblokujące, przeciwpoślizgowe
i poduszki powietrzne w technice samochodowej, obrabiarki sterowane numerycznie, roboty
i manipulatory itp.
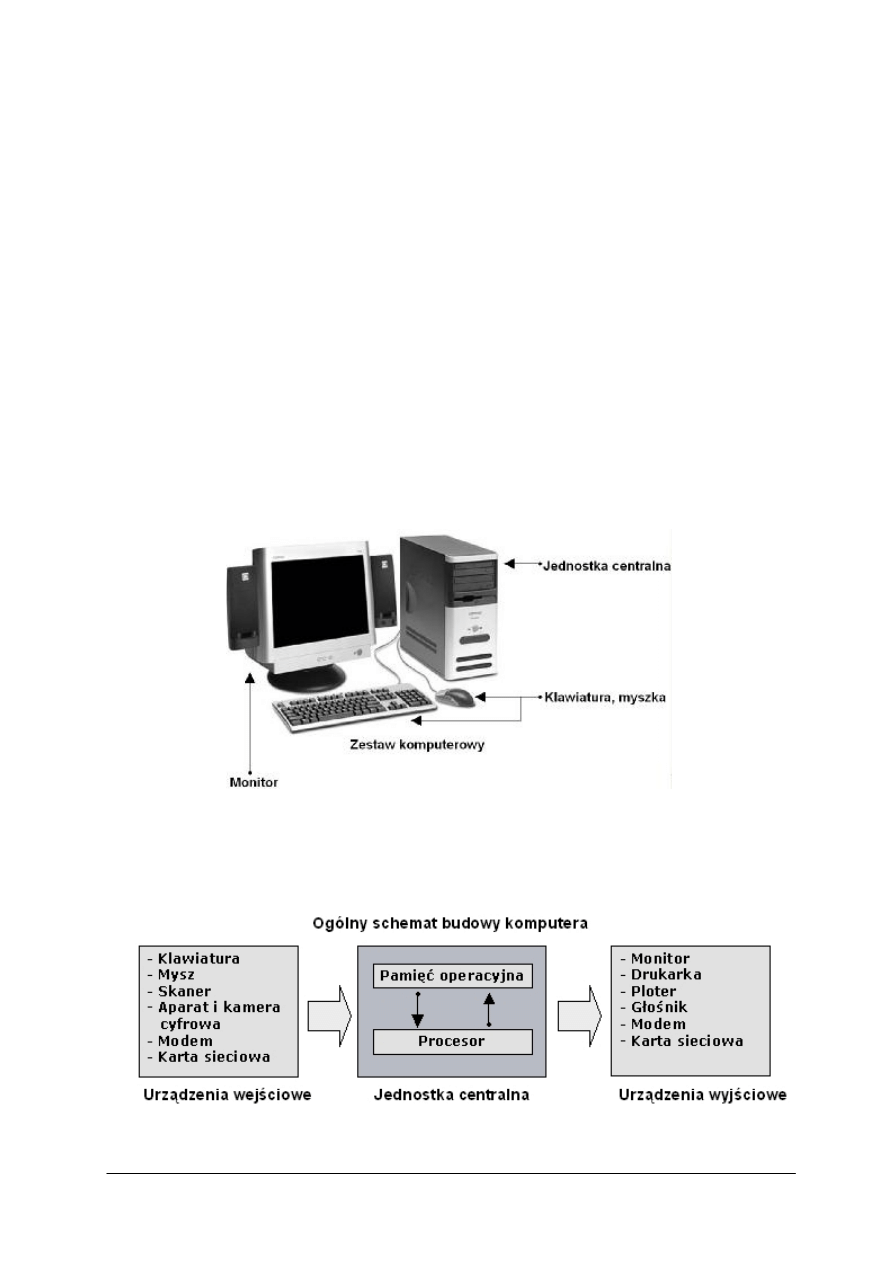
Komputer to zespół urządzeń wewnętrznych oraz zewnętrznych złożony w tzw. zestaw
komputerowy (rys. 5), gdzie rodzaje zastosowanych urządzeń określają przeznaczenie oraz
zdolności operacyjne komputera.
Staje się coraz bardziej niezbędnym urządzeniem
wspomagającym wykonywanie wielu czynności i prac. Umożliwia on generowanie
i przetwarzanie obrazu (tekstu i grafiki), dźwięku, sterowanie różnorodnymi urządzeniami
i systemami w domu oraz zakładach pracy, jest bardzo pomocny przy komunikowaniu się osób
oraz urządzeń.
Rys. 4. Widok zestawu komputerowego [12, s. 2]
Informacje do komputera wprowadzane są poprzez tzw. urządzenia wejściowe, wyniki
swoich działań komputer przekazuje za pomocą tzw. urządzeń wyjściowych. Struktura typowego
zestawu komputerowego przedstawiona jest na rys.5.
Rys. 5. Struktura zestawu komputerowego [12, s. 9]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
15
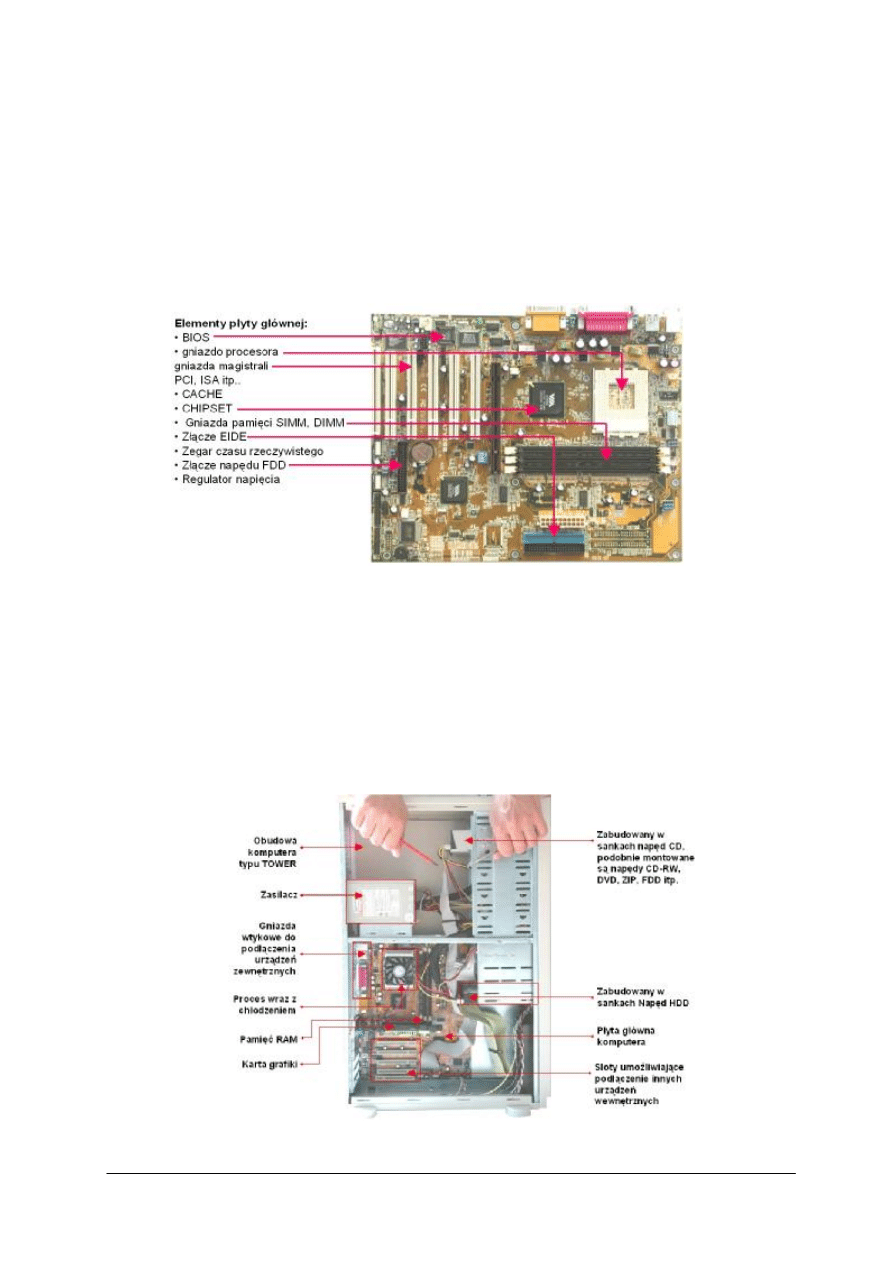
Najważniejsze elementy komputera zlokalizowane są w obudowie jednostki centralnej
(rys. 6). Znajdują się tutaj:
1) płyta główna z obwodami drukowanymi, na której montowana jest znaczna część
komponentów niezbędnych do poprawnego funkcjonowania systemu komputerowego,
2) dysk twardy,
3) napęd dyskietki,
4) napęd CD – ROM lub DVD,
5) zasilacz komputera,
6) gniazda wtykowe (np. USB) do podłączania urządzeń zewnętrznych.
Rys. 6.Rozmieszczenie wybranych elementów komputera w obudowie jednostki centralnej [12, s. 18]
Na płycie głównej znajdują się najważniejsze układy elektroniczne komputera (rys.7):
1) procesor – główny element komputera, jest odpowiedzialny za przetwarzanie informacji,
2) magistrala systemowa – ścieżka obwodu drukowanego łącząca wszystkie komponenty
komputera i umożliwiająca ich komunikowanie się pomiędzy sobą,
3)
pamięć ROM – służąca do przechowywania głównego programu obsługi komputera,
4) pamięć RAM (pamięć operacyjna) – służąca do odczytu i zapisu informacji
wykorzystywanych i przetwarzanych przez komputer,
5) karty rozszerzeń – np. karta graficzna, karta dźwiękowa, karta sieciowa, karta telewizyjna.
Rys. 7. Rozmieszczenie elementów na płycie głównej [12, s. 10]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
16
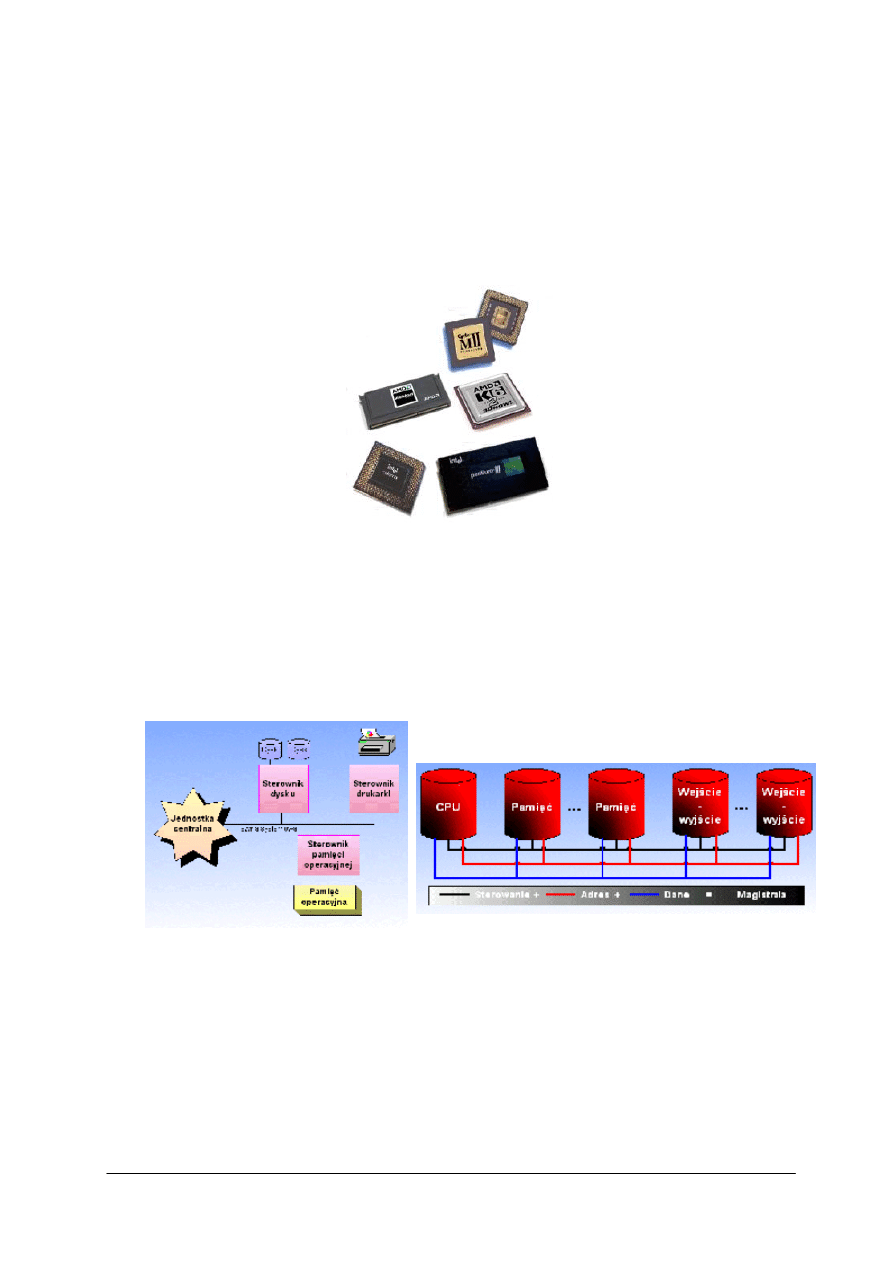
Procesor (rys. 8) jest centralną częścią systemu komputerowego i jego zadaniami są:
1) pobieranie rozkazów – w celu odczytania poleceń z pamięci,
2) interpretowanie rozkazów – polecenia należy zdekodować, aby wiedzieć jakie operacje
należy wykonać,
3) pobieranie danych – z pamięci lub modułu wejścia – wyjścia,
4) przetwarzanie danych – przeprowadzanie na danych operacji arytmetycznych lub
logicznych,
5) zapisywanie danych – w pamięci lub module wejścia – wyjścia.
Rys. 8. Procesory komputerów. [12, s.19]
Magistrala systemowa łączy najważniejsze podzespoły komputera tj. procesor, pamięć,
układy wejścia – wyjścia, jest wspólnym nośnikiem transmisji. Korzysta z niej pewna liczba
urządzeń, które się poprzez nią komunikują. Dostęp do magistrali jest sekwencyjny – w danej
chwili może korzystać z niej tylko jedno urządzenie – gdyby w tym samym czasie nadawało
kilka urządzeń, ich sygnały zakłócałyby się wzajemnie, co prowadziłoby do przekłamań
w transmisji danych.(rys. 9).
Rys. 9. Sposób wykorzystania magistrali systemowej [2]
Każde urządzenie (dysk twardy, karta grafiki, drukarka) posiada swój sterownik. Sterownik
ma za zadanie zapewnić uporządkowany, synchroniczny dostęp do wspólnej pamięci.
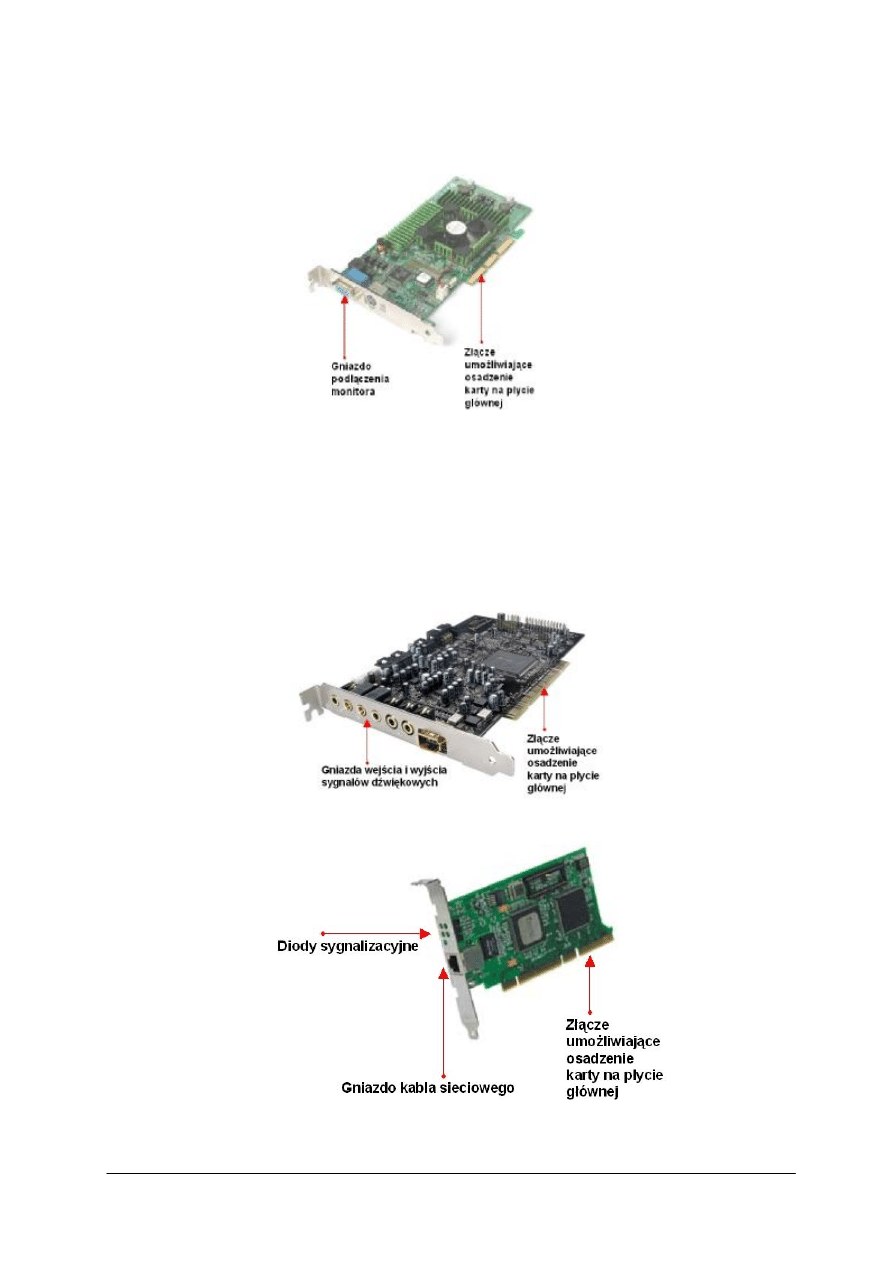
Karta graficzna, jeden z najważniejszych komponentów zestawu komputerowego. Może być
zintegrowana z płytą główną komputera, lub jest to osobna karta rozszerzeń. Najważniejszymi
parametrami karty graficznej są:
−
szybkość pracy,
−
ilość pamięci,
−
rozdzielczość,
−
ilość kolorów wyświetlanego obrazu.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
17
Główne zadanie karty graficznej to przetwarzanie obrazu cyfrowego generowanego przez
układy komputera na sygnał „zrozumiały” dla monitora (może to być sygnał: analogowy lub
cyfrowy)(rys. 11).
Rys. 10. Karta graficzna
[12, s. 21
Karta dźwiękowa, zwana też kartą muzyczną, jest to karta rozszerzeń umożliwiająca pracę
z dźwiękiem na komputerze klasy PC. Dzięki niej można zarówno odtwarzać dźwięk, jak
i tworzyć pliki dźwiękowe. Do karty dźwiękowej podłącza się takie urządzenia jak głośniki,
wzmacniacz czy mikrofon bądź urządzenie MIDI (np. syntezator). Główne zadanie karty
dźwiękowej to przetwarzanie sygnałów cyfrowych na analogowe (przy odtwarzaniu dźwięków)
lub odwrotnie (przy nagrywaniu dźwięków) (rys. 11).
Rys. 11. Karta dźwiękowa [12, s. 22]
Rys. 12. Karta sieciowa [12, s. 23]

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
18
Karta sieciowa – karta rozszerzeń niezbędna do podłączenia komputera do sieci LAN.
Do karty sieciowej można podłączyć kabel koncentryczny lub kabel typu skrętka łączący
komputer z siecią. Często karty mają możliwość podłączenia dwóch różnych typów kabla.
Najnowsze karty sieciowe obsługują już nie tylko sieci kablowe ale także sieci radiowe (rys.12).
Dysk twardy – zespół tarcz wykonanych z materiału o dużej sztywności pokrytych warstwą
magnetyczną służący do gromadzenia i przechowywania wszystkich danych, programów
i wyników pracy komputera.(rys. 13).
Rys. 13. Widok dysku twardego [12, s. 24]
Napęd CD – ROM stosowany jest do zapisu oraz odczytywania informacji na dysku CD
(rys. 14). Stosowane są również napędy DVD do zapisu i odczytywania informacji na dysku
DVD. Na dysku DVD można zmieścić wielokrotnie więcej informacji niż na dysku CD.
Rys. 14.Widok napędu CD – ROM [12, s. 25]
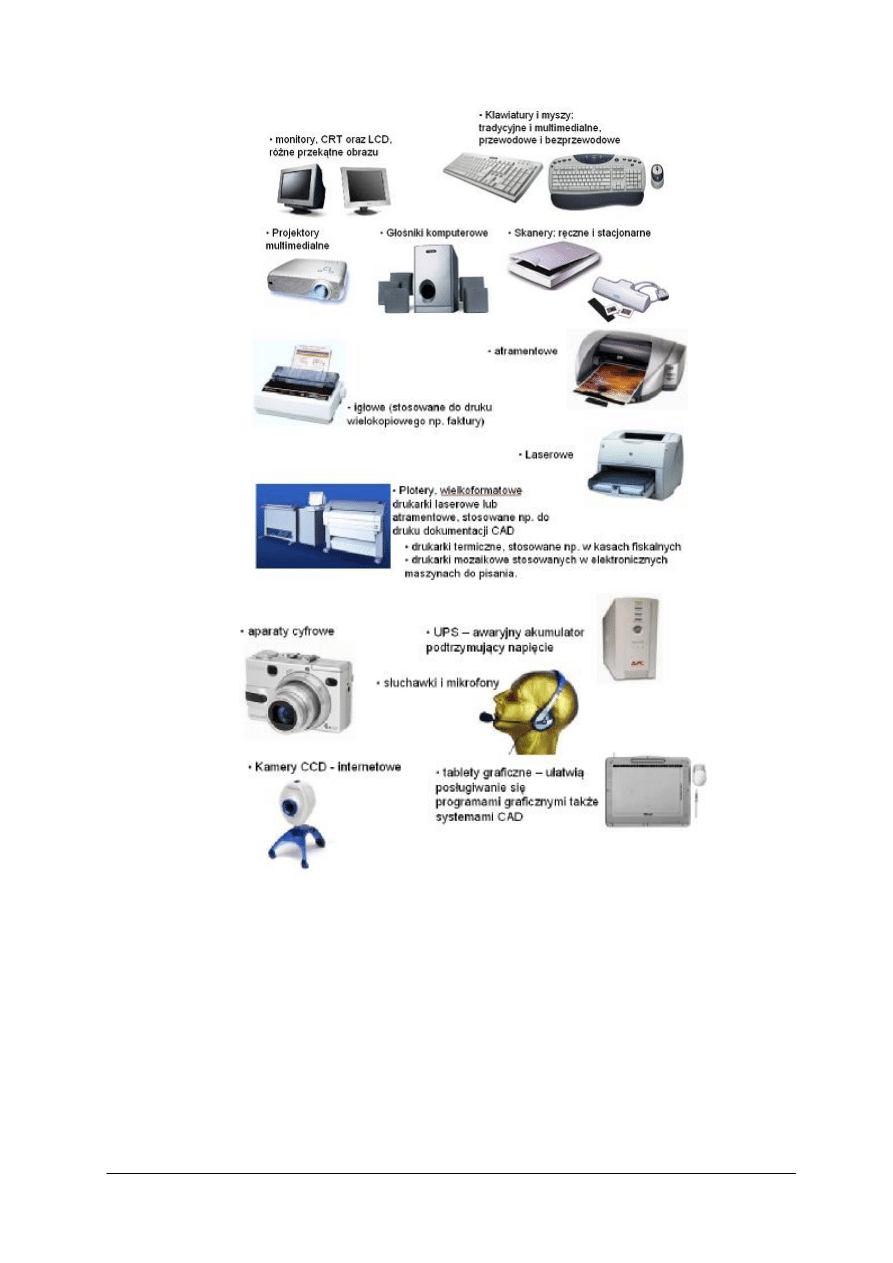
Liczba urządzeń zewnętrznych które mogą współpracować z komputerem jest bardzo duża
(rys. 15).
Mogą to być:
−
zewnętrzne napędy nośników danych,
−
trackaball (odwrócona myszka),
−
czytniki kodów kreskowych,
−
kasy fiskalne,urządzenia z dziedziny sterowania systemami,
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
19
Rys. 15. Przykłady urządzeń współpracujących z komputerem [12
,
s. 28, 29, 30]
Pralki inteligentne
Współczesna pralka powinna charakteryzować się niskim zużyciem wody i energii
oraz dobrą jakością prania (usunąć zabrudzenia, nie niszczyć tkanin). Mechatronika umożliwia
konstruowanie i budowanie takich pralek.
Inteligentne czujniki i sterownik nadzorują każdy
moment przebiegu prania. Na podstawie zebranych informacji, określane są ustawienia
programów, czas trwania prania, zużycie wody i energii. Optymalne kombinacje parametrów
gwarantują maksymalną efektywność prania.(rys. 16. rys. 17).

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
20
Rys. 16. Widok panelu sterowania pralki [24]
Rys. 17. Widok współczesnej pralki [24].
Typowe funkcje, które realizuje współczesna pralka to:
1.
Sprawdzanie czystości wody w czasie prania – specjalny czujnik kontroluje czystość wody
po wykonaniu płukania; jeżeli woda jest odpowiednio czysta to oznacza, że płukanie można
zakończyć. Dzięki takiemu rozwiązaniu, płukanie przebiega w optymalny sposób,
gdyż zużywa się tylko tyle wody i czasu ile jest niezbędne. Wysoka efektywność prania
jest zachowana przy mniejszym zużyciu wody, energii elektrycznej i czasu.
2.
Sprawdzanie ilości piany – podczas trwania programu specjalny czujnik uniemożliwia
tworzenie się zbyt dużej ilości piany zmniejszającej efekty prania. Gdy piany jest zbyt dużo,
usuwany jest nadmiar detergentu, dzięki temu tkaniny są czyste, bez pozostałości środków
piorących.
3. Sprawdzanie ciężar, załadowanych tkanin – specjalny czujnik mierzy ciężar tkanin
załadowanych do bębna. Na podstawie pomiaru dobierana jest odpowiednia ilość środka
piorącego.
4.
Dobranie optymalnej ilości wody do ciężaru załadowanych tkanin – ponieważ każdy rodzaj
tkaniny pochłania różną ilość wody z różną szybkością, więc ilość potrzebnej wody wciąż
się zmienia.
5.
Czas rozpoczęcia lub zakończenia prania – m
ożliwość zaprogramowania startu programu
prania lub jego zakończenia.
6.
Zabezpieczenie przed przelaniem się wody.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
21
Automatyczny kocioł retortowy centralnego ogrzewania
Nowoczesne kotły grzewcze powinny spełniać, między innymi, następujące warunki:
−
zapewnić żądaną temperaturę medium w instalacji centralnego ogrzewania,
−
spełniać wymagania dotyczące emisji zanieczyszczeń do atmosfery,
−
automatyczna praca,
−
zagwarantowanie stałej (lub programowalnej) temperatury w pomieszczeniach,
−
zużywać jak najmniejszą ilość opału.
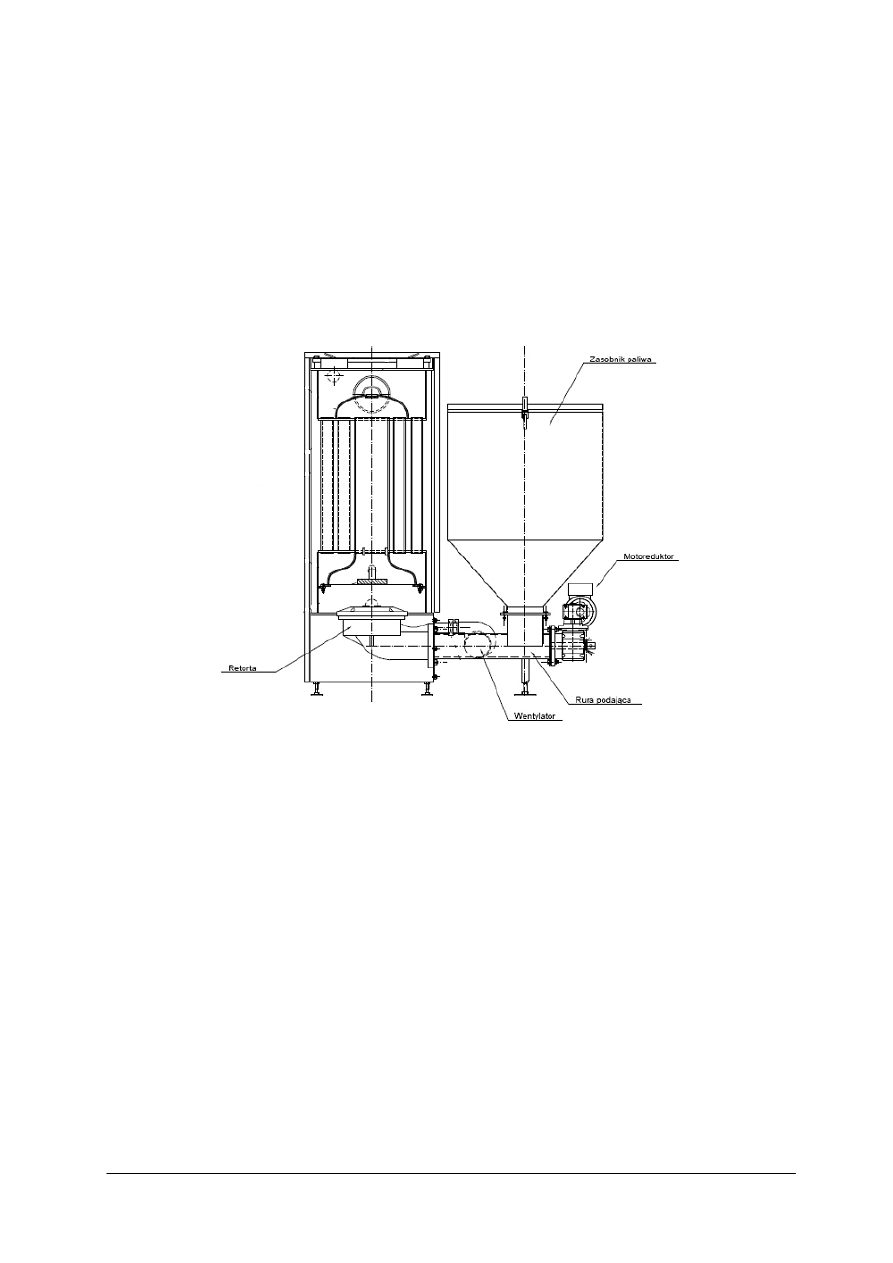
Kotły wyposażone są w palenisko retortowe, do którego podawane jest paliwo z zasobnika
za pomocą podajnika ślimakowego. Powietrze do spalania doprowadzane jest przez wentylator
do układu dysz w retorcie paleniska. Praca kotłów sterowana jest za pomocą oprogramowanego
sterownika elektronicznego włączającego w sposób sekwencyjny podajnik i wentylator (rys. 18).
Rys. 18. Schemat konstrukcyjny kotła retortowego. [16]
Ilość dostarczanego węgla zależna jest od zapotrzebowania ciepła. Moc cieplna kotła
regulowana jest czasem pracy podajnika oraz zadaną temperaturą wody – ręcznie ustawiany
przez termostat. Śrubowy podajnik węgla pracuje w cyklu przerywanym. Parametry regulacji
można dostosować do aktualnych warunków pogodowych i zapotrzebowania na ciepło
w ogrzewanych pomieszczeniach. Kocioł został wyposażony w system ochrony przed skutkami
awarii zasilania oraz różnego rodzaju zakłóceń. Typowymi stanami alarmowymi są:
−
uszkodzenie czujnika temperatury wody wylotowej,
−
uszkodzenie czujnika temperatury podajnika węgla,
−
wygaśnięcie paleniska,
−
przekroczenie temperatury 95 ºC.
Widok kotła retortowego pokazany jest na rys. 19, a widok panelu programowania kotła
retortowego pokazany jest na rys. 20.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
22
Rys. 19. Widok kotła retortowego [16]
Rys. 20. Widok panelu programowania kotła retortowego [16]
Aparat cyfrowy
Aparat cyfrowy (rys.21) to urządzenie optoelektroniczne służące do rejestracji obrazów
statycznych oraz ich gromadzenia w pamięci cyfrowej aparatu.
W aparatach cyfrowych można wyróżnić kilka zasadniczych elementów:
−
obiektyw,
−
matryca (niewymienny element półprzewodnikowy CCD lub CMOS),
−
wyświetlacz LCD,
−
wizjer,lampa błyskowa,
W aparacie cyfrowym na płaszczyźnie ogniskowej umieszczony jest przetwornik obrazu.
Jest to specjalny światłoczuły układ scalony. Obecnie stosowane są dwa rodzaje takich
przetworników: CCD (ang. Charge – Coupled Device) i CMOS (ang. Complementary Metal
Oxide Semiconductor). Oba spełniają taką samą rolę, ale częściej stosowane są przetworniki
CCD. W czasie wykonywania zdjęcia aparatem cyfrowym, przetwornik próbkuje światło
docierające przez obiektyw i przetwarza je na sygnały elektryczne, które są następnie
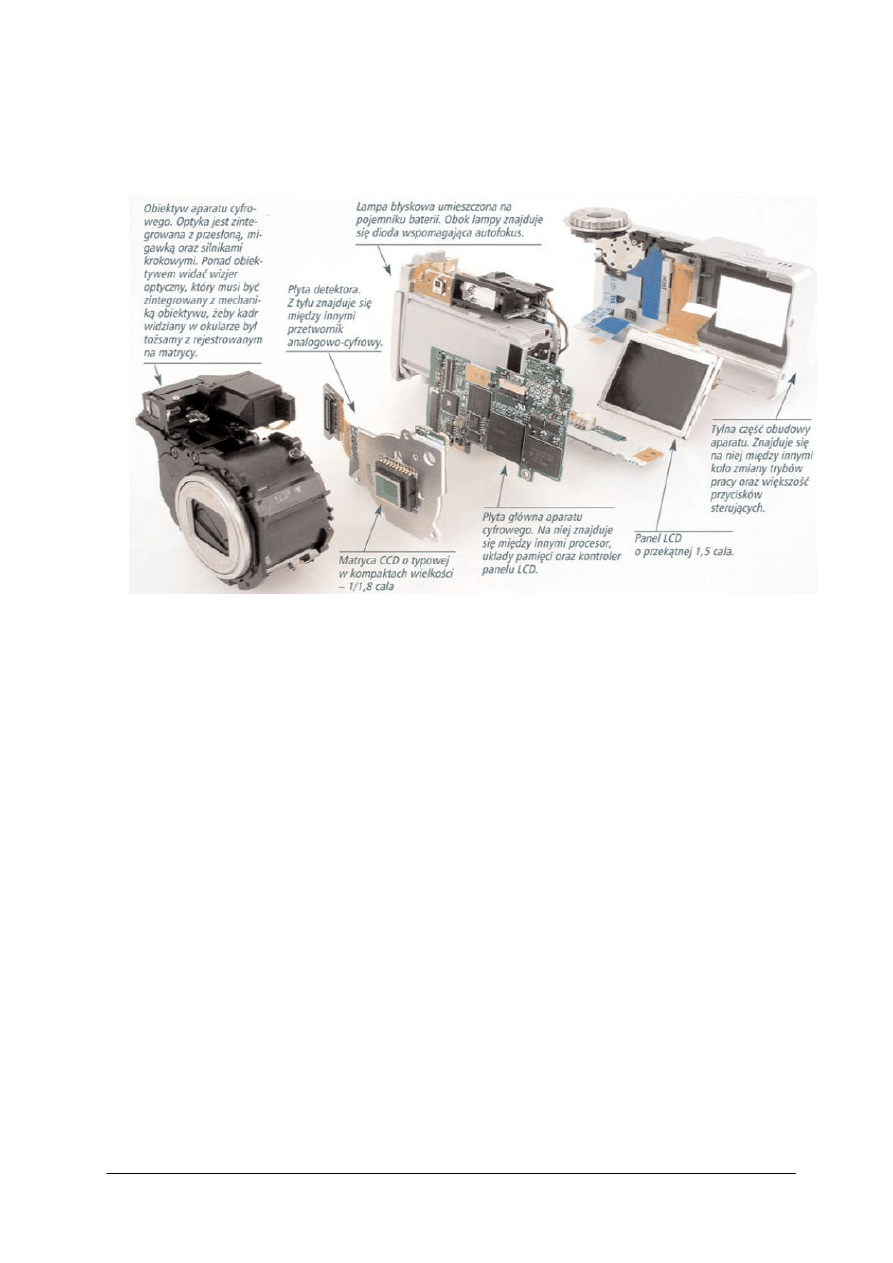
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
23
wzmacniane i przesyłane do przetwornika analogowo – cyfrowego (A/C), który nadaje im postać
cyfr. Na końcu komputer zaistalowany w aparacie przetwarza zgromadzone w ten sposób dane
cyfrowe, które potem są zapisywane w pamięci jako nowy obraz
Rys. 21. Budowa aparatu cyfrowego [ 25]
Nowoczesny silnik spalinowy
Przykładem systemu mechatronicznego w którym wyraźnie widać integrację różnorodnych
dziedzin inżynierii i technologii może być silnik współczesnego samochodu.
Zastosowano tu:
−
elektroniczny system sterujący wtryskiem paliwa (elektronika, elektrotechnika, systemy
informatyczne),
−
system sterowania otwarciem i zamknięciem zaworów (mechaniczno – hydrauliczny),
−
układ kontroli zawartości tlenu w spalinach (inżynieria chemiczna),
−
katalizator spalin (inżynieria chemiczna oraz ochrona środowiska),
−
układ recyrkulacji spalin (inżynieria chemiczna oraz ochrona środowiska).
Parametry pracy silnika są na bieżąco podawane przez sensory do głównego modułu
sterującego pracą silnika. Część sygnałów dostarczana jest na deskę rozdzielczą samochodu
w postaci informacji optycznej, jest to więc forma monitoringu i wizualizacji
4.2.2. Pytania sprawdzające
Odpowiadając na pytania sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jaką rolę w komputerze pełni płyta główna?
2. Do czego służą urządzenia wejściowe komputera?
3. Jaka jest różnica pomiędzy pamięciami RAM, a ROM?
4. Na czym polega opcja sprawdzania czystości wody w nowoczesnej pralce automatycznej?
5. Jaki jest cel stosowania w aparacie cyfrowym matrycy CCD?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
24
4.2.3. Ćwiczenia
Ćwiczenie 1
Scharakteryzuj wszystkie elementy struktury funkcjonalnej zestawu komputerowego
znajdującego się w pracowni, w której odbywasz zajęcia z zakresu analizowania urządzeń
i systemów mechatronicznych.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z informacjami zawartymi w rozdziale 4.2. Poradnika dla ucznia,
2) zidentyfikować elementy struktury funkcjonalnej komputera,
3) zapisać w karcie sprawozdania z ćwiczenia krótką charakterystykę poszczególnych
elementów ,
4) przedstawić wyniki pracy w formie prezentacji.
Wyposażenie stanowiska pracy:
−
literatura zgodna z rozdziałem 6 Poradnika dla ucznia,
−
zestaw komputerowy,
−
arkusz papieru formatu A4,
−
materiały do pracy metodą przewodniego tekstu.
Ćwiczenie 2
Scharakteryzuj urządzenia współpracujące z komputerem.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z informacjami zawartymi w rozdziale 4.2. Poradnika dla ucznia,
2) zapisać w karcie sprawozdania z ćwiczenia rodzaje i przeznaczenie urządzeń
współpracujących z komputerem,
3) przedstawić wyniki pracy w formie prezentacji.
Wyposażenie stanowiska pracy:
−
literatura zgodna z rozdziałem 6 Poradnika dla ucznia,
−
arkusz papieru formatu A4,
−
przybory do pisania.
4.2.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
wyjaśnić sposób działania komputera?
2)
scharakteryzować strukturę funkcjonalną komputera?
3)
uzasadnić, że nowoczesna pralka automatyczna jest urządzeniem
mechatronicznym?
4)
wyjaśnić procesy zachodzące w aparacie cyfrowym podczas
wykonywania zdjęcia?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
25
4.3. Maszyny manipulacyjne i roboty
4.3.1. Materiał nauczania
Wprowadzenie do zagadnień robotyzacji procesόw
Współczesne formy i metody realizacji procesόw produkcyjnych i usługowych posiadają
nastepujące cechy:
1) wyeliminowanie (lub ograniczenie) udziału człowieka przy wykonywanu prac nudnych,
monotonnych, powtarzających się,
2) zwiększanie poziomu bezpieczeństwa podczas wykonywania pracy,
3) dążenie do zapewnienia wysokiej i stałej jakości wytwarzanych produktόw oraz
świadczonych usług,
4) maksymalne wykorzystanie czasu pracy drogich i skomplikowanych maszyn i urządzeń,
5) możliwość szybkiego przystosowania linii produkcyjnych (stanowisk produkcyjnych)
do produkcji innego asortymentu produktόw,
6) obniżenie kosztόw realizacji procesόw produkcyjnych oraz usług.
Istotne znaczenie ma w tych przypadkach zastąpienie pracy człowieka podczas
wykonywania czynności manipulacyjnych przez pracę maszyn – tzw. maszyn manipulacyjnych.
Czynności manipulacyjne polegają na uchwyceniu określonego obiektu (przedmiotu),
zmienianiu jego położenia, transportowaniu, pozycjonowaniu lub orientowaniu względem
przyjętej bazy, przygotowaniu obiektu do wykonywania na nim lub za jego pomocą operacji
technologicznych.
Z pewnym uproszczeniem można stwierdzić, iż wykonywanie czynności manipulacyjnych
przez człowieka wymaga wydatkowania energii (funkcje energetyczne) oraz zaangażowania
pracy umysłowej (funkcje intelektualne). Maszyny manipulacyjne są to urządzenia (maszyny)
lokomocyjne przeznaczone do częściowego lub całkowitego zastępowania funkcji
energetycznych oraz intelektualnych człowieka. Wśród maszyn manipulacyjnych wyróżnia się
dwie ich podstawowe kategorie mające znaczące zastosowanie – manipulatory oraz roboty.
Manipulator przemysłowy jest to ręcznie sterowane urządzenie przeznaczone
do wspomagania, częściowego zastępowania człowieka przy wykonywaniu czynności
manipulacyjnych w przemysłowym procesie produkcyjnym.
Robotem
(przemysłowym)
jest
urządzenie
wielofunkcyjne
przeznaczone
do przemieszczania w przestrzeni materiałόw, części, narzędzi lub specjalnych przyrządόw
mający programowane ruchy w celu wykonania rόżnorodnych zadań. Cechą odrόżniającą roboty
od manipulatorόw jest ich uniwersalność polegająca na możliwości zastosowania tego samego
urządzenia technicznego do realizacji rόżnych funkcji w procesie produkcji. Wymaga
to zapewnienia większych możliwości ruchowych oraz realizacji mniej lub bardziej złożonych
automatycznych czynności związanych z procesem sterowania ruchem.
Charakterystycznymi właściwościami robotόw są:
−
programowalność,
−
możliwość wykonywania ruchόw po rόżnych torach.
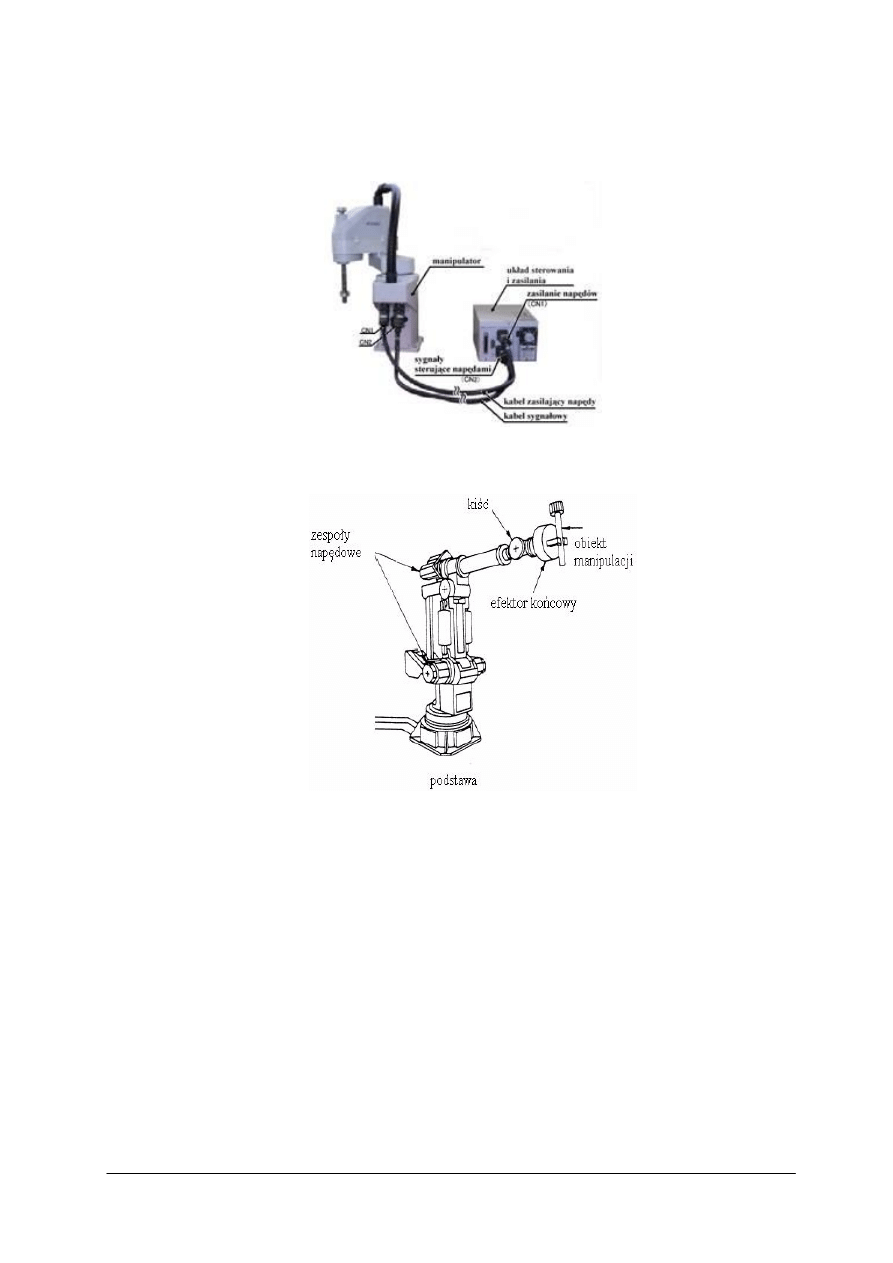
Struktura funkcjonalna układόw manipulacyjnych i robotόw
Wspόłczesne roboty przemysłowe nie są budowane zgodnie z jednym schematem
konstrukcyjnym. Jednakże w skład każdego robota przemysłowego wchodzą następujące układy:
(rys. 22),
−
układ zasilania,
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
26
−
układ sterowania,
−
układ ruchu (jednostka kinematyczna).
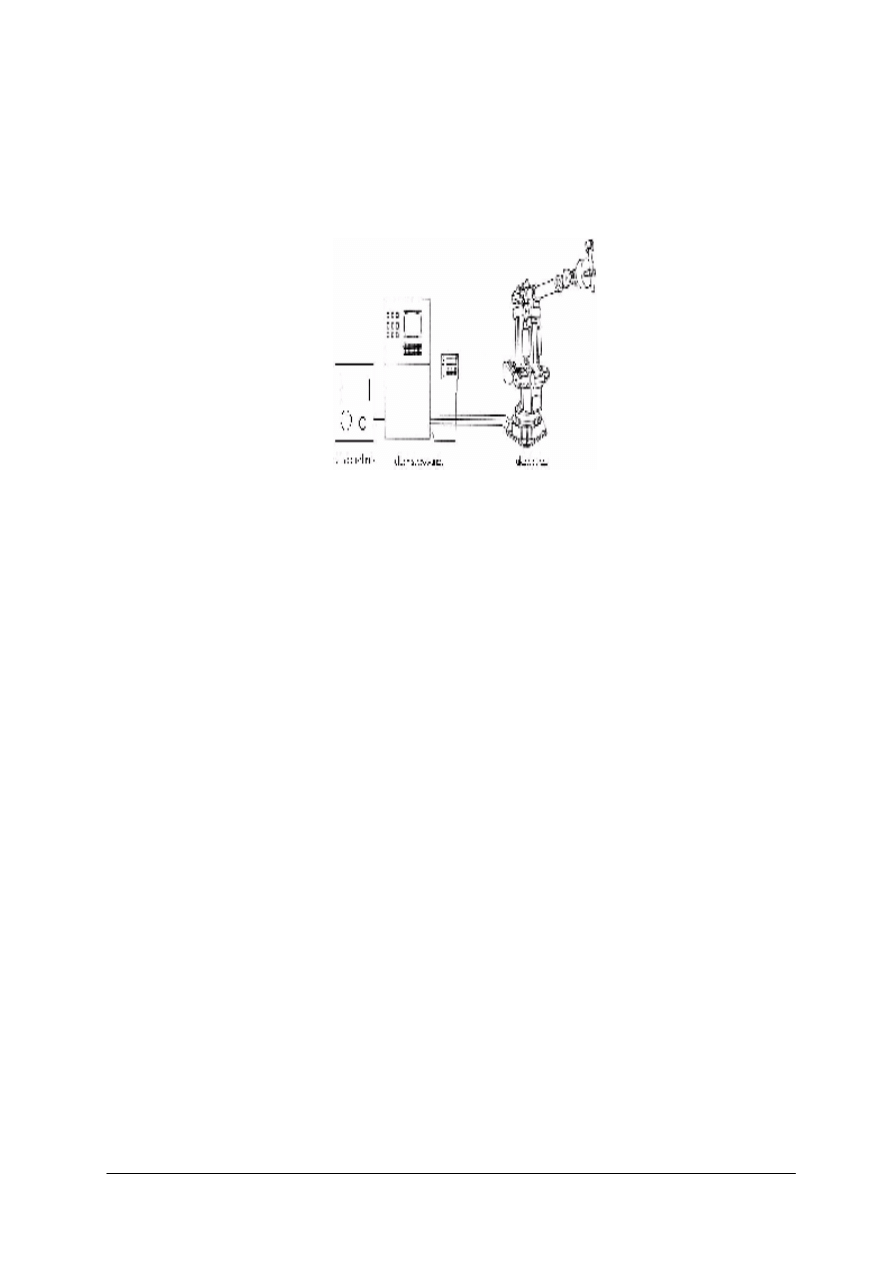
W przypadku manipulatorόw wszystkie układy zazwyczaj zabudowane są w jednym
korpusie, natomiast dla robotόw stanowią one odrębne urządzenia połączone ze sobą w sposόb
umożliwiający przepływ pomiędzy nimi energii oraz sygnałόw (rys. 23).
Rys. 22. Struktura funkcjonalna robota [8, s. 17]
Zadaniem układu zasilania jest dostarczenie do poszczegόlnych elementόw robota energii
niezbędnej do poprawnego ich działania. Może to być energia elektryczna, hydrauliczna
lub pneumatyczna. W zależności od rodzaju energii zasilającej robot, w skład układu zasilania
mogą wchodzić:
–
urządzenia zasilania silnikόw prądu stałego oraz przemiennego, falowniki oraz niezbędne
układy przekaźnikowe (w przypadku zasilania energią elektryczną),
–
stacja olejowa oraz niezbędny osprzęt hydrauliczny (w przypadku zasilania energią
hydrauliczną),
–
stacja przygotowania powietrza, jeśli sprężone powietrze nie jest pobierane z sieci
(w przypadku zasilania energią pneumatyczną).
Spotykane jest mieszane zasilanie robotόw, np. energią elektryczną i pneumatyczną lub
energią elektryczną i hydrauliczną.
Zadaniem układu sterowania jest generowanie sygnałόw sterujących poszczegόlnymi
napędami robota i urządzeń wspόłpracujących z robotem. Sygnały te generowane są w oparciu
o informacje dotyczące aktualnego stanu układu ruchu i urządzeń wspόłpracujących
i przetwarzane zgodnie z programem działania robota. Układ sterowania robotόw jest zwykle
wykonywany jako szafa sterownicza zawierająca:
−
głόwny pulpit sterowniczy z urządzeniami do uruchamiania robota lub ręcznego sterowania,
−
przenośny sterownik ręczny połączony z szafą długim kablem, służący do programowania
robota i doprowadzania układu ruchu robota do kolejnych położeń wynikających
z realizowanej trajektorii ruchu (ręczny programator, panel sterowania),
−
jednostkę sterująco – ogiczną (komputer), zawierającą pamięć operacyjną programόw pracy
robota i wspόłpracującą z układami WE/WY.
Układami WE/WY(wejść – wyjść) dla jednostki sterująco–logicznej robota są:
−
serwonapędy uładu ruchu,
−
układy pomiarowe przemieszczeń,
−
czujniki położeń chwytakόw i narzędzi,
−
czujniki stanu pracy urządzeń wspόłpracujących z robotem.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
27
Rys. 23. Widok robota [23]
Rys. 24. Budowa układu ruchu robota przemysłowego [8, s. 17]
Zadaniem układu ruchu (rys. 24) jest fizyczna realizacja zaprogramowanej trajektorii ruchu
robota, czyli przemieszczanie obiektu, ktόrym robot manipuluje po określonym torze.
Układ ruchu składa się z układu kinematycznego (zbioru członόw mechanicznych
połączonych ruchowo), napędów wprawiających w ruch odpowiednie człony układu
kinematycznego oraz sensorόw umożliwiających pomiary pozycji poszczegόlnych członόw.
Układ ruchu maszyn manipulacyjnych (manipulatorόw i robotόw) wzorowany jest na
budowie ciała ludzkiego.
Zarόwno w maszynie manipulacyjnej, jak i u człowieka można wyrόżnić analogiczne człony
składowe bardzo zbliżone do siebie pod względem funkcjonalnym: tzn. podstawa (korpus),
dołączone do niego ramię (ramiona), kiść oraz mechanizm chwytowy. Układ kinematyczny,
stanowiący układ nośny maszyny manipulacyjnej, odpowiada szkieletowi człowieka, natomiast
mięśniom odpowiadają napędy poszczegόlnych członόw mechanicznych układu ruchu.
Rola, jaką spełniają podstawowe zespoły funkcjonalne układu ruchu, jest następująca:
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
28
−
podstawa – płyta lub inna konstrukcja stanowiąca pierwszy człon układu kinematycznego
robota albo konstrukcja, z którą jest połączony nieruchomo pierwszy człon układu
kinematycznego,
−
ramię – zespół połączonych członów i napędzanych przegubów, który ustawia położenie
kiści,
−
kiść – zespół połączonych członów i napędzanych przegubów między ramieniem,
a elementem roboczym, który podtrzymuje, ustawia i orientuje element roboczy,
−
efektor – urządzenie przeznaczone do chwycenia i utrzymania obiektu manipulacji
albo do bezpośredniego wykonania operacji technologicznej realizowanej przez robot.
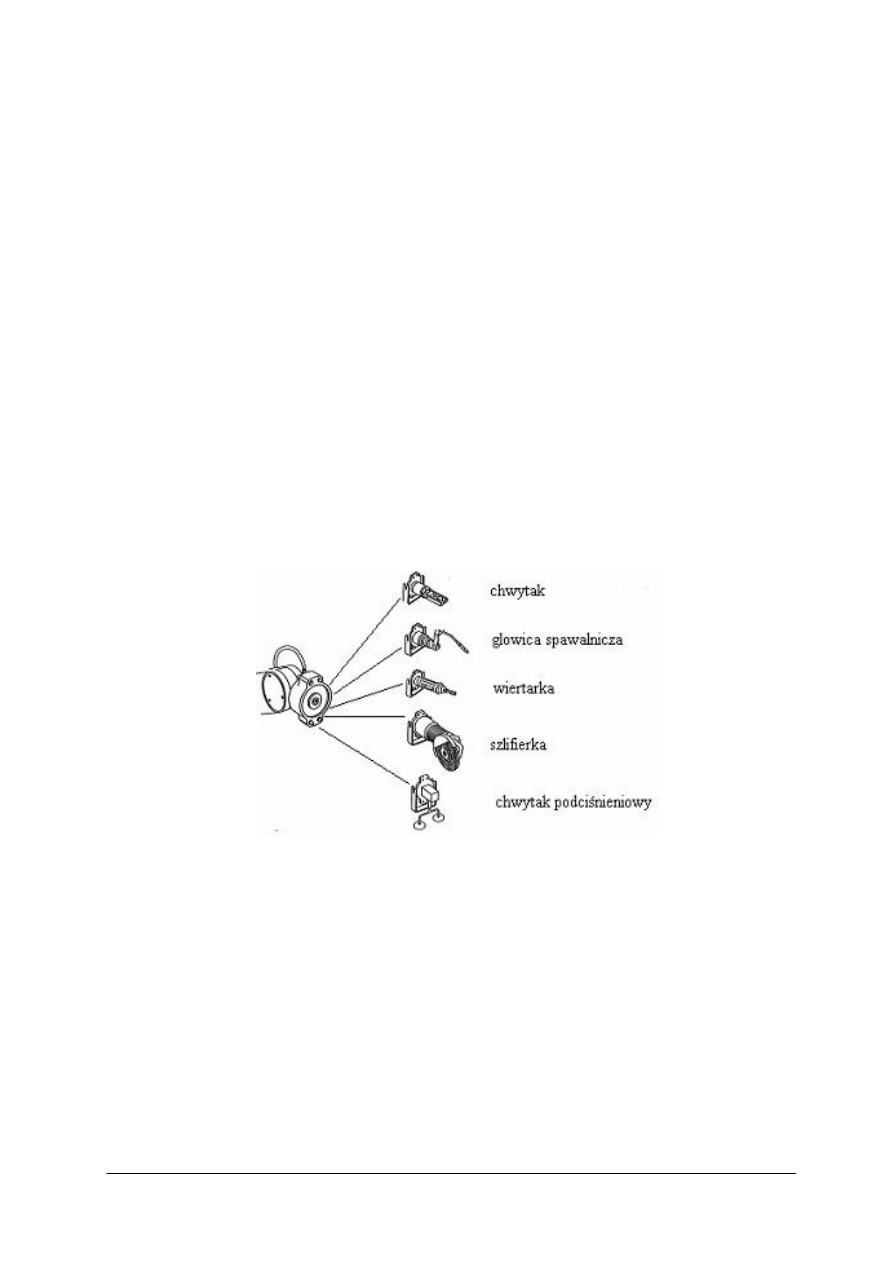
Szczegόlne miejsce wśrόd wymienionych powyżej zespołόw układu ruchu stanowią
efektory (chwytaki). Wynika to z autonomicznych w stosunku do samego robota zadań
związanych bezpośrednio z samym przemiotem manipulacji oraz realizowanym procesem
(chwycenie, odpowiednia orientacja przedmiotu lub narzędzia, wykonanie procesu
technologicznego).
Efektory
traktowane
muszą
być
jako
urządzenia
specjalne
dokonstruowywane do robota (rys. 25).
We wspόłczesnych rozwiązaniach konstrukcyjnych robotόw układ ruchu jest z reguły
wydzielony i stanowi odrębną jednostkę strukturalną robota. Układ sterowania oraz układ
zasilania znajdują się w pewnym oddaleniu od układu ruchu. Wynika to z konieczności
zapewnienia tym układom warunkόw bezpiecznego i pewnego działania poprzez
wyeliminowanie lub ograniczenie szkodliwego wpływu zakłόceń mechanicznych (np. drgań),
cieplnych, elektrycznych, itp., ktόrych źrόdłem mogą być urządzenia procesu produkcyjnego
(urządzenia wspόłpracujące), jak rόwnież sam układ ruchu robota.
Rys. 25. Przykłady efektorów
Struktura jednostek kinematycznych układόw manipulacyjnych i robotόw
Układy ruchu (jednostki kinematyczne) robotόw są zbiorem członόw mechanicznych
połączonych ruchowo. Człony te połączone są szeregowo tworząc tzw. łańcuch kinematyczny.
Struktura kinematyczna robota przemysłowego dotyczy więc rozmieszczenia elementόw
składowych robota wraz z przedstawieniem możliwości relacji między tymi elementami dla
danego układu. Jednostkę kinematyczną manipulatora tworzy mechanizm kinematyczny wraz
z dołączonymi napędami. Mechanizm maszyny manipulacyjnej określają dwa parametry
kinematyczne:
−
ruchliwość
–
liczba
stopni
swobody
łańcucha kinematycznego mechanizmu
z unieruchomionym członem – podstawą;
−
manewrowość – liczba stopni swobody łańcucha kinematycznego mechanizmu
z unieruchomionymi: członem – podstawą i członem – ostatnim w łańcuchu
kinematycznym.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
29
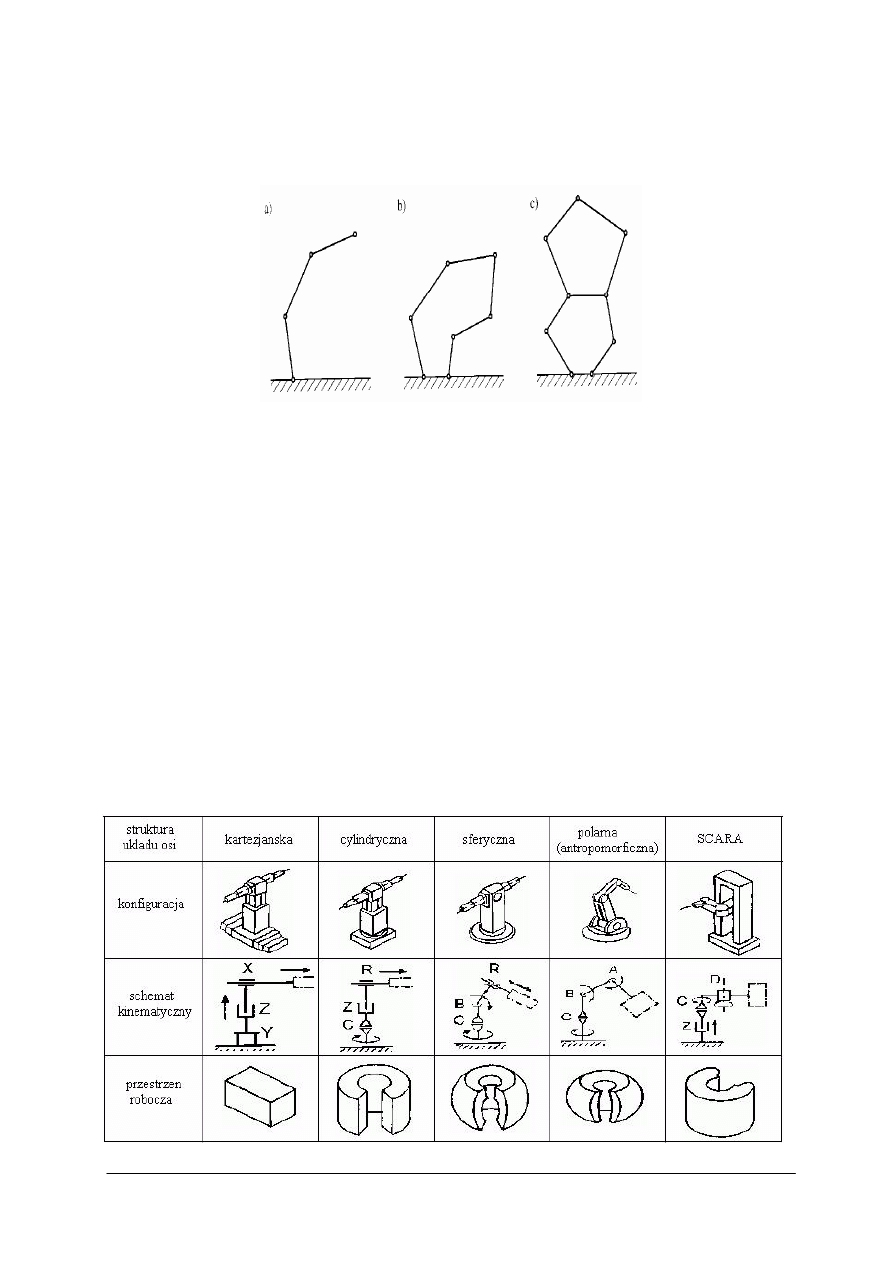
Manipulatory i roboty przemysłowe najczęściej posiadają otwarty łańcuch kinematyczny.
Łańcuchy te składają się z kilku ogniw czynnych umożliwiających przestrzenne przemieszczanie
i orientacje końcówki roboczej, czyli efektora.(rys. 26).
Rys. 26. Przykłady łańcuchów kinematycznych.
a)otwarty prosty, b) zamknięty prosty, c) złożony [8, s. 18]
W celu racjonalnego i bezpiecznego użytkowania jednostek kinematycznych maszyn
manipulacyjnych definiuje (określa) się następujące przestrzenie:
−
głόwna przestrzeń robocza – przestrzeń, w obrębie ktόrej przemieszcza się konstrukcyjne
zakończenie ostatniego, wolnego, ale nierozdzielnie związanego z mechanizmem jednostki
kinematycznej członu (z reguły sprzęgu chwytaka),
−
pomocnicza przestrzeń robocza – przestrzeń w obrębie której przemieszczają się dodatkowe
człony mechanizmu jednostki kinematycznej maszyny manipulacyjnej, np. chwytaki,
narzędzia,
−
przestrzeń kolizyjna – przestrzeń w obrębie ktόrej zawierają się wszystkie elementy
konstrukcyjne i przemieszczają się wszystkie człony mechanizmu jednostki kinematycznej,
−
przestrzeń strefy zagrożenia (strefa zagrożenia) – przestrzeń zabroniona przepisami
lub
normami bhp dla obsługi w czasie pracy jednostki kinematycznej.
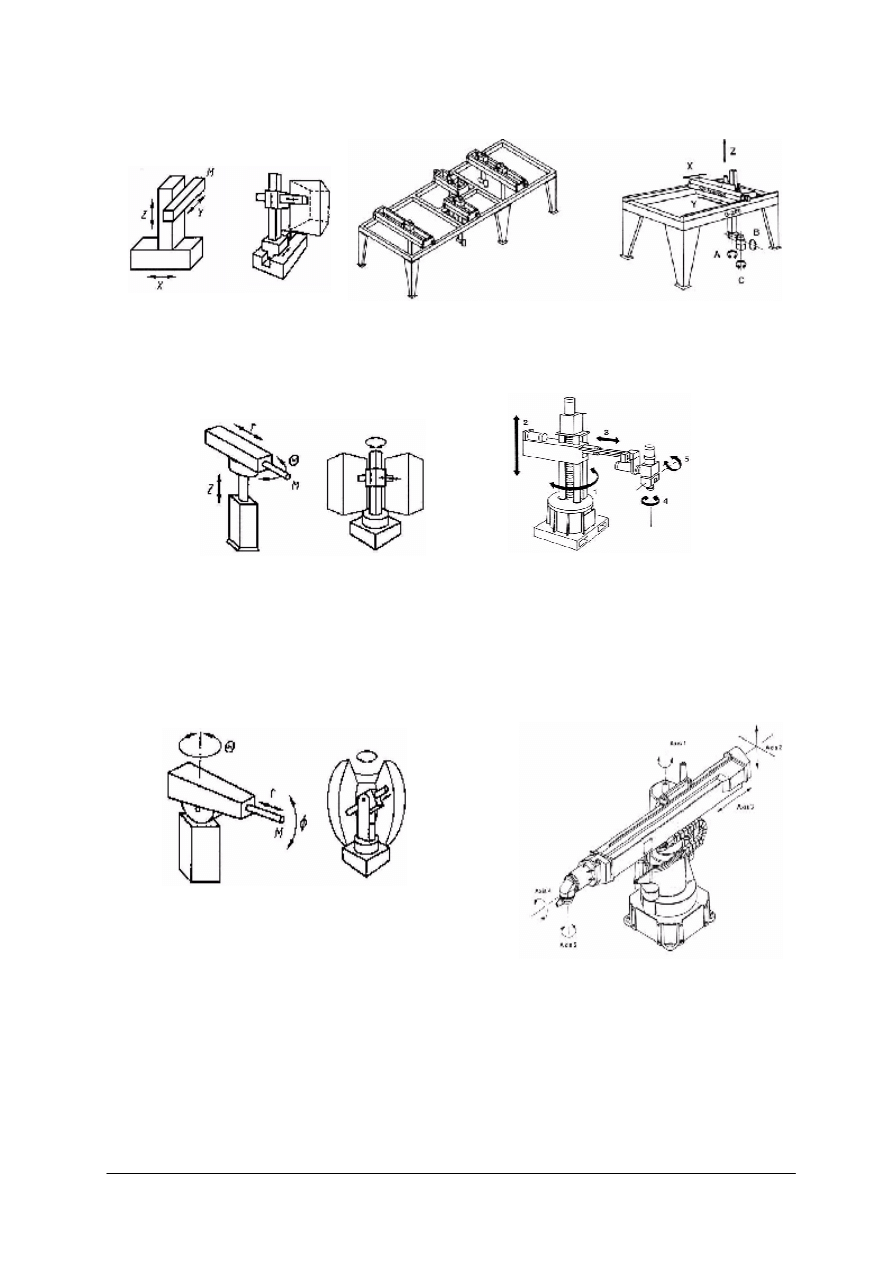
Jednostki kinematyczne wspόłczesnych maszyn manipulacyjnych zwykle budowane
są w oparciu o pięć podanych w tabeli 3 struktur kinematycznych.
Tabela 3. Konfiguracja, oznaczenia, schematy i przestrzenie robocze robotόw o rόżnych strukturach
kinematycznych układu ruchu
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
30
a) b)
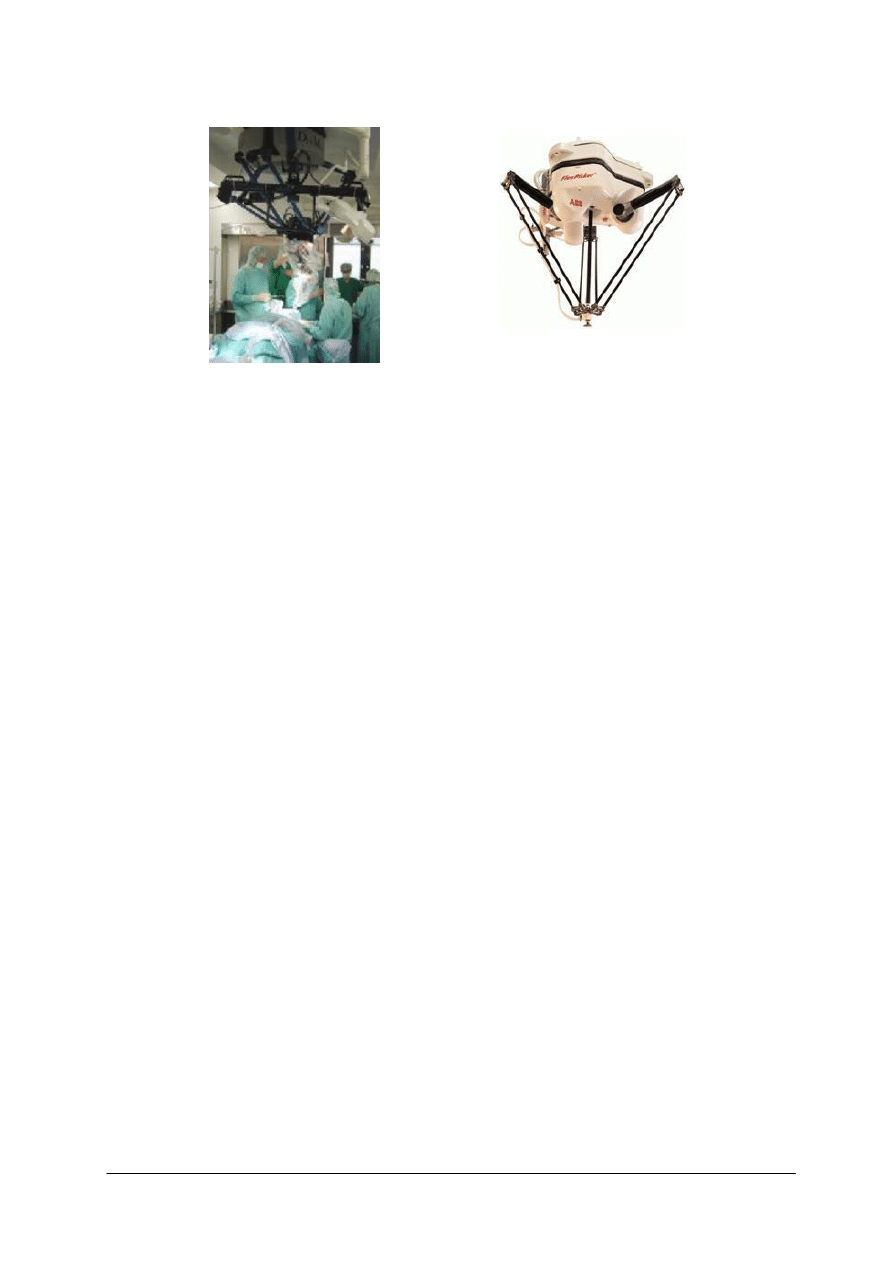
Rys. 27. Robot równoległy o zamkniętym łańcuchu kinematycznym [23]
a) przykład zastosowania b) widok
Istnieją również roboty równoległe o zamkniętym łańcuchu kinematycznym. Zasada
działania tego typu robotów opiera się na idei odpowiednio zaprojektowanych ramion robota.
Użycie tych ramion pozwala ustawić pozycję i orientację ruchomej platformy. Takie roboty
posiadają 3 ramiona. Ruchoma platforma jest wyposażona w efektor który posiada dodatkowy
stopień swobody umożliwiający np. obrót (rys. 27). Przykładem zastosowania tych robotów jest
przenoszenie i odpowiednie ustawienie ciężkiego mikroskopu używanego do przeprowadzania
skomplikowanych operacji chirurgicznych.
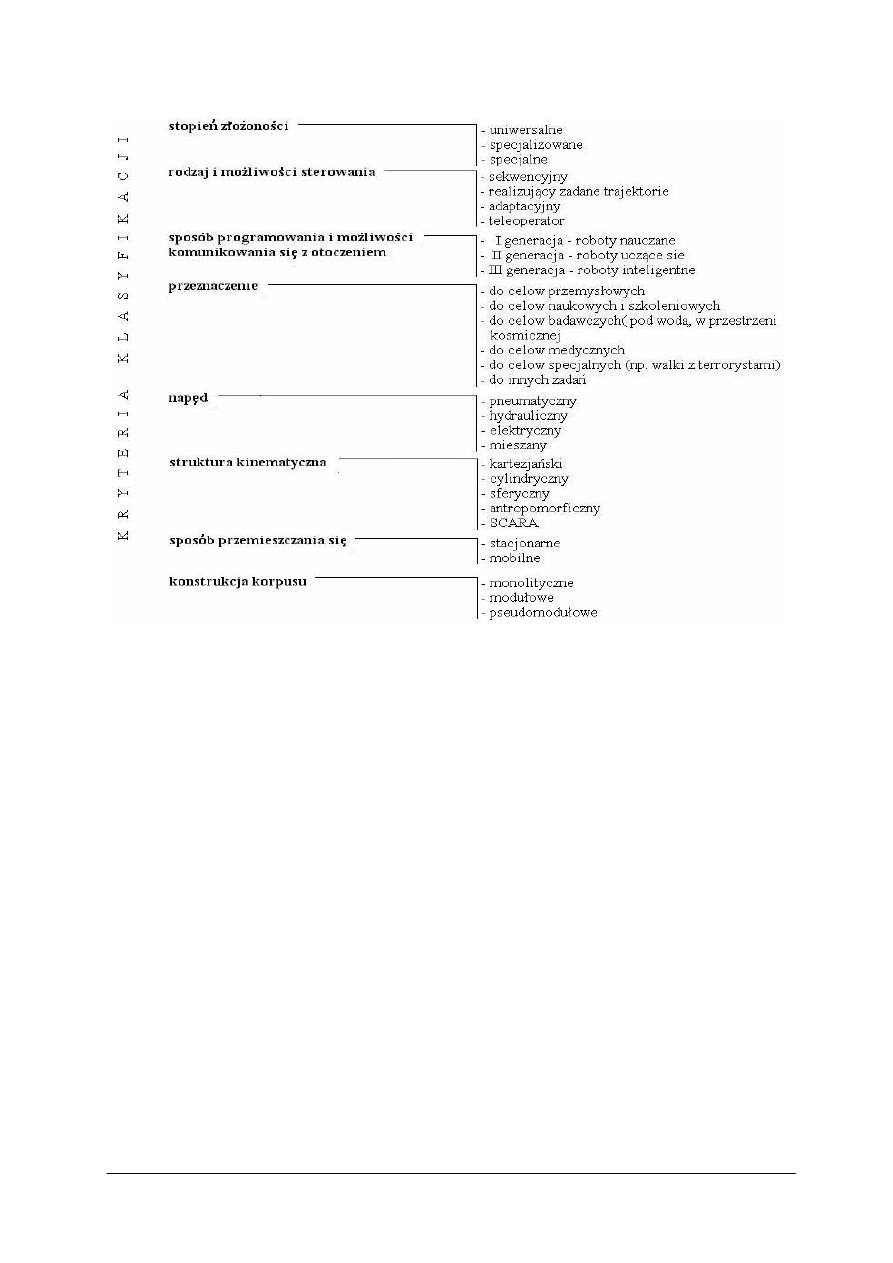
Klasyfikacja układόw manipulacyjnych i robotόw
Robotyka jest nauką interdyscyplinarą, nie w pełni sformalizowaną i stąd wynikają trudności
w jej jednoznacznym definiowaniu. Spotykane są rόżne podejścia do klasyfikacji maszyn
manipulacyjnych. Poniżej zaprezentowano jedną z możliwych klasyfikacji (rys. 28) będącą
kompilacją poglądόw rόżnych autorόw.
Maszyny manipulacyjne uniwersalne są przeznaczone do wykonywania rόżnego rodzaju
operacji technologicznych i czynności manipulacyjnych, wspόłpracują z rόżnymi rodzajami
wyposażenia.
Maszyny manipulacyjne specjalizowane są przeznaczone do wykonywania operacji
technologicznych lub czynności manipulacyjnych jednego rodzaju, współpracują z jednym
rodzajem wyposażenia.
Maszyny
manipulacyjne specjalne są przeznaczone do wykonywania operacji
technologicznych lub czynności manipulacyjnych przy wykorzystaniu jednej odmiany
wyposażenia.
Maszyna manipulacyjna sekwencyjna jest wyposażona w sekwencyjny układ sterowania
(wykonujący kolejno zaprogramowane ruchy i czynności).
Maszyna manipulacyjna realizująca zadane trajektorie realizuje ustaloną procedurę
sterowanych ruchόw według instrukcji programowych specyfikujących żądane pozycje
oraz żądaną prędkość ruchu.
Maszyna manipulacyjna adaptacyjna jest wyposażona w sensoryczny, adaptacyjny lub uczący
się układ sterowania. Ma możliwość zmiany swoich własności dzięki wykorzystaniu informacji
sensorycznych lub nagromadzonych doświadczeń, planowaniu zadań lub przez nauczanie
i trening.
Teleoperator jest maszyną manipulacyjną ze sterowaniem zdalnym realizowanym przez
operatora lub komputer. Przenosi na odległość funkcje motoryczne i sensoryczne operatora.
Nie ma połączeń mechanicznych z operatorem.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
31
Rys. 28. Klasyfikacja maszyn manipulacyjnych
Maszyny manipulacyjne (roboty) I generacji wyposażone są w pamięć, do ktόrej można
wprowadzić rozkazy (program pracy) – wprowadzony program maszyna realizuje samodzielnie.
Maszyny manipulacyjne I generacji nie są wyposażone w układy pozwalające zbierać informacje
o środowisku zewnętrznym. Wspόłczesne roboty należą do I generacji.
Maszyny manipulacyjne (roboty) II generacji mają możliwość kontaktowania się
z otoczeniem w celu optymalnego działania. Są zdolne rozpoznać obiekt spośrόd innych
bez względu na jego położenie i kształt, dopuszczalna jest zmiana położenia robota względem
poszukiwanego przedmiotu.
Maszyny manipulacyjne (roboty) III generacji posiadać będą pewien „poziom intelektualny”
umożliwiający im aktualizowanie programu działania w zmieniających się warunkach.
Wyposażone będą w układy sensoryczne wzroku, słuchu, czucia pozwalające im rozpoznawanie
obiektόw w przestrzeni zapamiętanej przez robot i umożliwiać będą samodzielną realizację
zadania robota.
Maszyny manipulacyjne kartezjańskie (rys. 29), (niektόre ich modele zwane są bramowymi)
mają przestrzeń roboczą w kształcie prostopadłościanu nieraz o bardzo dużych wymiarach.
Typowym zastosowaniem robotόw kartezjańskich jest :
– przemieszczanie materiałόw pomiędzy maszynami na duże odległości,
– przemieszczanie (oraz wyszukiwanie) obiektόw w zautomatyzowanych magazynach.
Przestrzeń robocza robotόw cylindrycznych (rys. 30) ma kształt wydrążonego cylindra,
może posiadać dużą objętość. Mniejsze roboty cylindryczne stosowane są do szybkiego
precyzyjnego montażu, natomiast duże roboty wykorzystywane do przenoszenia, podawania
i odbierania obiektόw, załadunku i rozładunku maszyn technologicznych.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
32
a) b) c) d)
Rys. 29. Roboty kartezjańskie: a) schemat struktury kinematycznej, b) kształt przestrzeni roboczej,
c) przykład umieszczenia kilku robotόw kartezjańskich na jednej bramie, d) przykład konstrukcji robota
kartezjańskiego [20]
a) b) c)
Rys. 30. Roboty cylindrycze: a) schemat struktury kinematycznej, b) kształt przestrzeni roboczej, c) przykład
konstrukcji robota cylindrycznego [20]
Maszyny manipulacyjne sferyczne (rys. 31) charakteryzują się dużą przestrzenią roboczą
przy stosunkowo niewielkiej jednostce mechanicznej. Ruchy robota nie są płynne, co jest
powodem obniżenia ich szybkości i dokładności.
a) b) c)
Rys. 31. Roboty sferycze: a) schemat struktury kinematycznej, b) kształt przestrzeni roboczej,
c) przykład konstrukcji robota sferycznego [20]
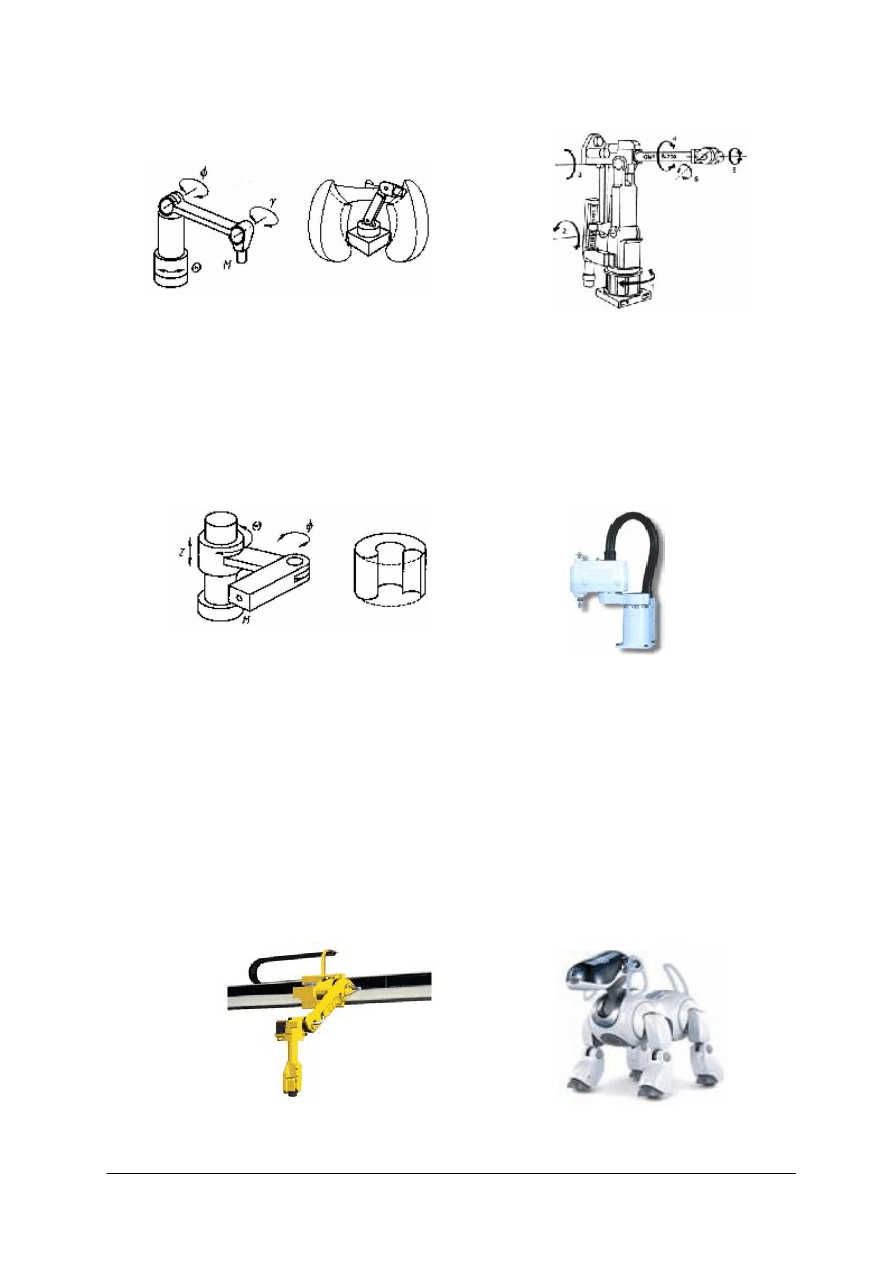
Maszyny manipulacyjne antropomorficzne (rys. 33) charakteryzują się dużą przestrzenią
roboczą w porόwnaniu z wielkością ich jednostki mechanicznej, bardzo dobrą gibkością kiści
umożliwiającą jej orientację prawie w każdym położeniu. Powtarzalność i dokładność
pozycjonowania są dobre, lecz nie nadające się do montażu precyzyjnego. Typowymi
zastosowaniami robotόw antropomorficznych są: spawanie, malowanie, gratowanie, podawanie,
przemieszczanie i odbieranie materiału.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
33
a) b) c)
Rys. 32. Roboty antropomorficzne: a) schemat struktury kinematycznej, b) kształt przestrzeni roboczej, c) przykład
konstrukcji robota antropomorficznego [20]
Roboty SCARA (Selective Compliance Assembly Arm) mają największą szybkość
i powtarzalność ze wszystkich konfiguracji robotόw. Roboty stosowane są do precyzyjnego,
bardzo szybkiego, lekkiego montażu. Typowymi zastosowaniami robotów SCARA
są: wkładanie elementόw w płytki obwodόw drukowanych, montaż małych urządzeń
elektromechanicznych, montowanie napędόw dyskόw w komputerach (rys. 33).
a) b) c)
Rys. 33. Roboty SCARA: a) schemat struktury kinematycznej, b) kształt przestrzeni roboczej,
c) przykład konstrukcji robota SCARA [20]
Roboty monolityczne mają układy ruchu o niezmiennej konstrukcji (o stałej strukturze
kinematycznej. Robot monolityczny można uzupełnić chwytakiem bądź narzędziami. Roboty
modułowe składają się z oddzielnych zespołόw ruchu, tzw. modułόw. Moduły te zestawiane
są zgodnie z zapotrzebowaniem odbiorcy.
Roboty pseudomodułowe charakteryzują się w pewnej części stałą strukturą kinematyczną,
ale dopuszczalna jest zmiana zgodnie z zapotrzebowaniem odbiorcy niektόrych zespołόw ruchu.
Roboty stacjonarne mocowane są bezpośrednio do podłoża lub do płyt wspornikowych.
Roboty mobilne są wyposażone w mechanizmy przemieszczania całego robota względem
podłoża. Mogą to być roboty suwnicowe, bramowe lub samodzielnie wykonujące ruch
autonomiczny dzięki procesom adaptacyjnym i uczenia się (rys. 34).
a) b
Rys. 34. Roboty mobilne, a) mocowany do suwnicy[17], b) samokroczący [15]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
34
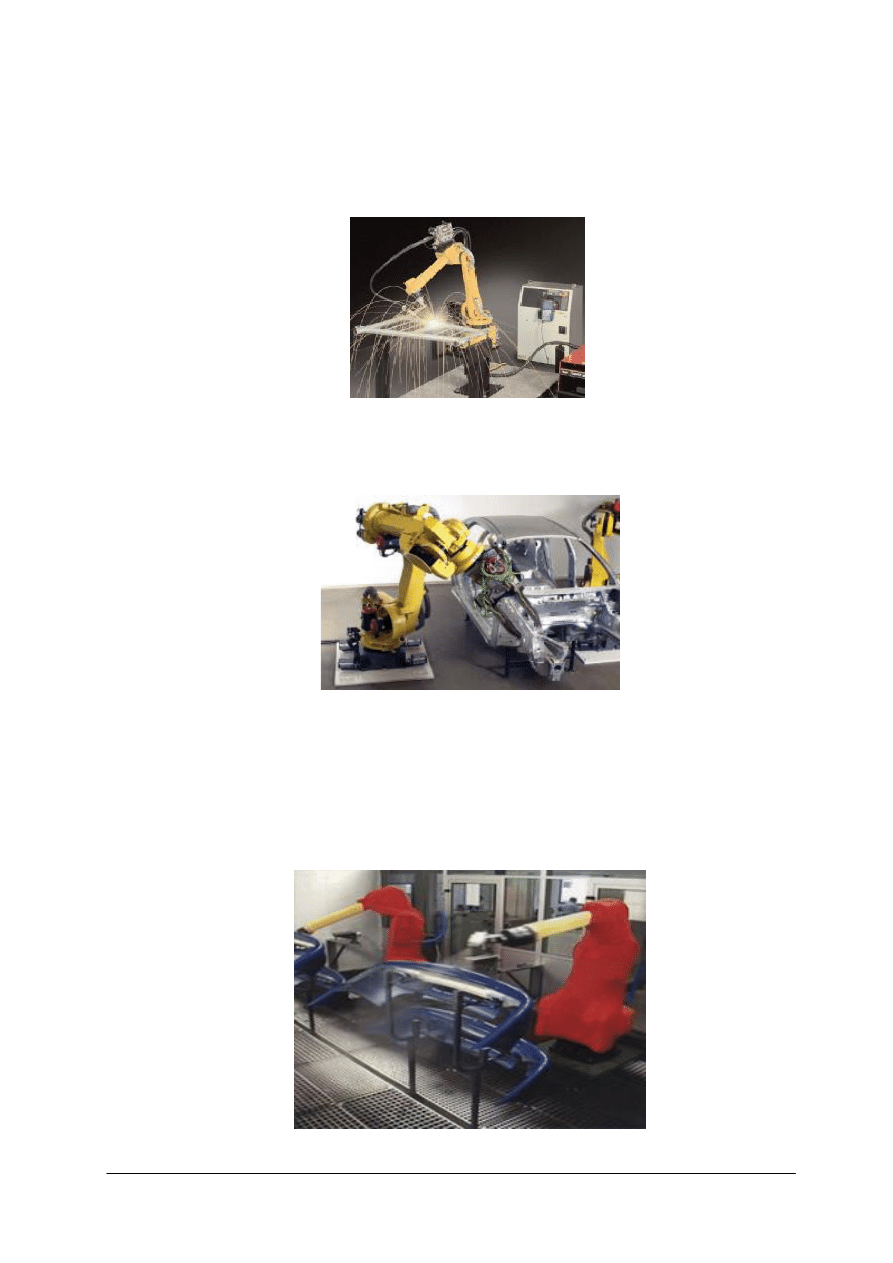
Obszary stosowania robotów
Roboty spawalnicze – jest to jedno z najpowszechniejszych zastosowań robotów
w przemyśle. Pod pojęciem robotów spawalniczych należy rozumieć szereg różnych robotów
stosowanych do spawania, zgrzewania, lutowania, stosowanych najczęściej w przemyśle
samochodowym i elektronicznym.
Rys. 35. Robot spawalniczy [23]
Ważnym obszarem wykorzystania robotów w przemyśle motoryzacyjnym jest proces
technologiczny zgrzewania karoserii samochodów zilustrowany na rys. 36.
Rys. 36. Zrobotyzowana linia zgrzewania karoserii samochodowych [1]
Roboty malarskie (rys. 37)
Innym zastosowaniem robotów w przemyśle jest natryskowe malowanie wyrobów.
Powtarzalność i szybkość pracy robotów pozwala uzyskać prawie doskonałe pokrycie
malowanego materiału. Dodatkowym powodem stosowania robotów przy malowaniu
natryskowym jest eliminacja szkodliwości stosowanych substancji dla człowieka. Roboty
są zabezpieczone przed skutkami działania nieprzyjaznego środowiska.
Rys. 37. Robot malarski [23]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
35
Roboty montażowe
Z analizy rozwoju robotyki wynika, iż w przyszłości największym obszarem zastosowań
robotów będą prace montażowe. Prace te ze względu na dokładność i powtarzalność czynności
są idealne do robotyzacji i dlatego też większość obecnie produkowanych urządzeń
jest montowana automatycznie lub półautomatycznie.
Należy wspomnieć, iż procesowi montażu mogą podlegać różnego rodzaju operacje
technologiczne, od mało skomplikowanych (np. zakręcanie nakrętki na śrubie) do bardzo
skomplikowanych (operacje montażu układów elektronicznych).
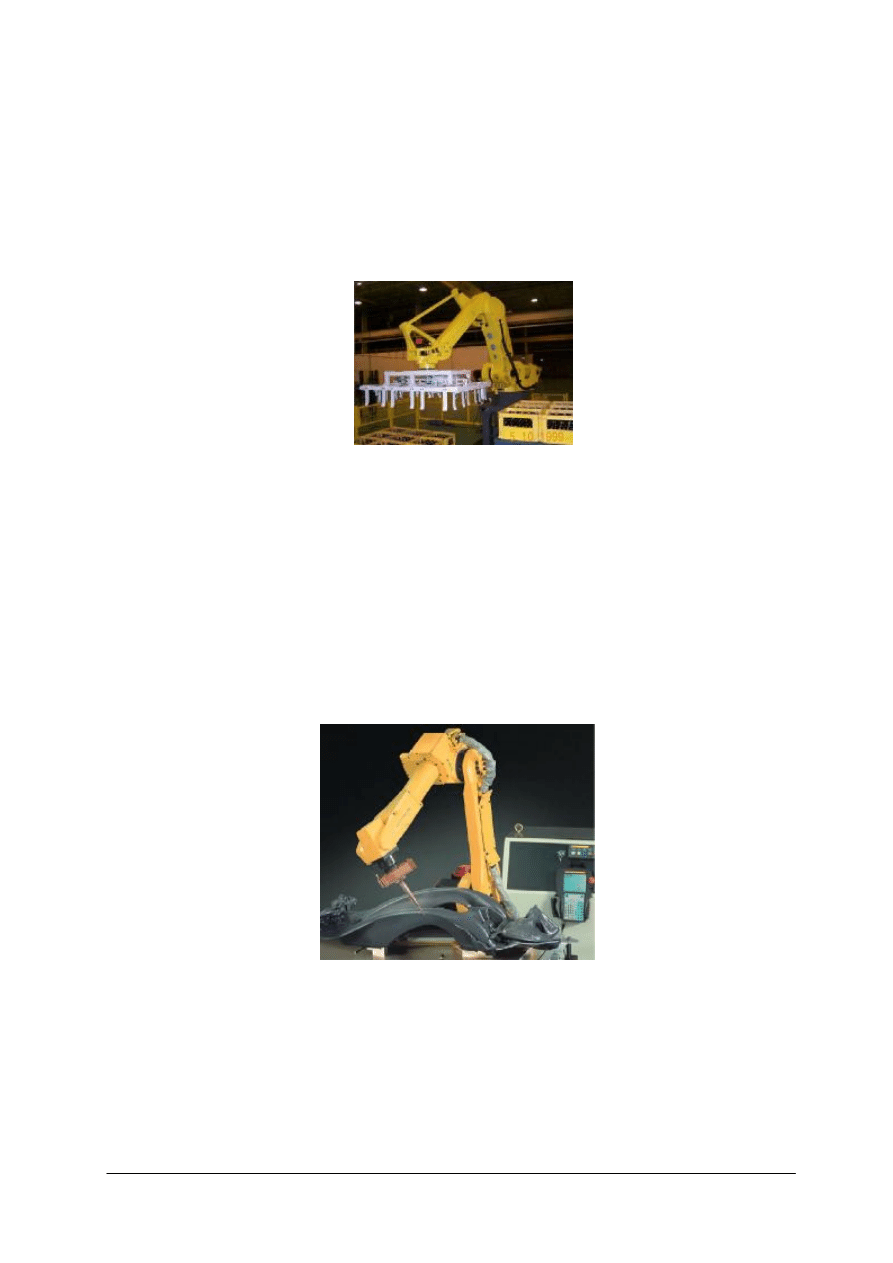
Rys. 38. Robot paletyzujący [17]
Roboty paletyzujące.(rys. 38)
Częstym zadaniem robotów jest paletyzowanie wyrobów. Duży wysięg ramienia robota,
odpowiednio duża prędkość przemieszczania i udźwig są pożądanymi cechami dla procesu
paletyzowania.
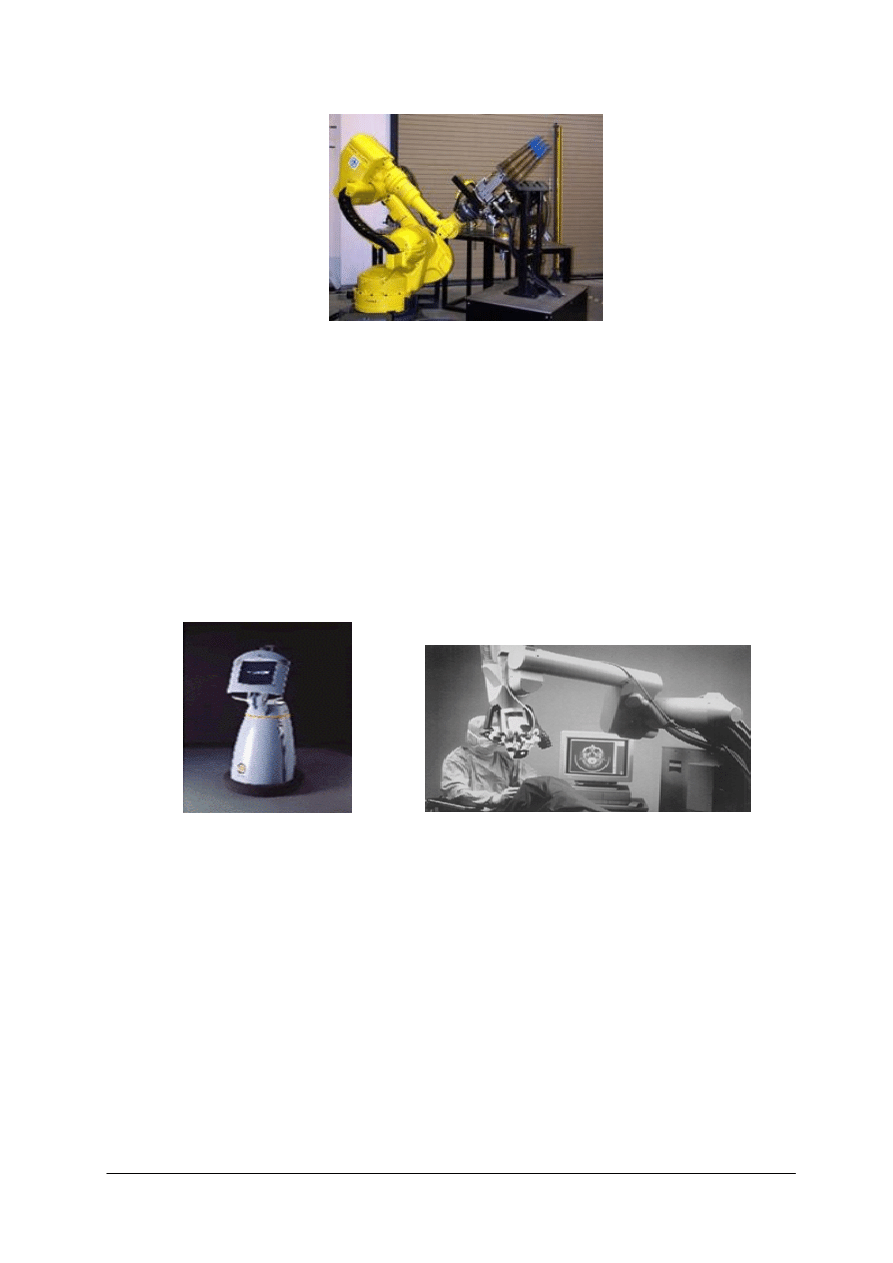
Roboty stosowane do obróbki materiałów
Roboty są wykorzystywane do operacji obróbki materiałów, np. obróbka skrawaniem.
Ciekawym przykładem może być zastosowanie robotów do cięcia przy pomocy wody
pod wysokim ciśnieniem. Taki sposób wykorzystania robotów umożliwia bardzo precyzyjną
obróbkę nawet bardzo skomplikowanych operacji technologicznych. Na rys. 39. przedstawiony
jest robot do obróbki krawędzi produkowanych elementów.
Rys. 39. Robot do obróbki [23]
Roboty do utylizacji i zabezpieczania odpadów
Ważnym
zastosowaniem robotów jest utylizacja i zabezpieczanie odpadów przemysłowych
i militarnych. Przykładem takiego zastosowania może być np. rozbrajanie amunicji (rys. 40).
Roboty mogą być także wykorzystywane do zabezpieczania i utylizacji substancji
radioaktywnych.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
36
Rys. 40. Robot do rozbrajania amunicji.[23]
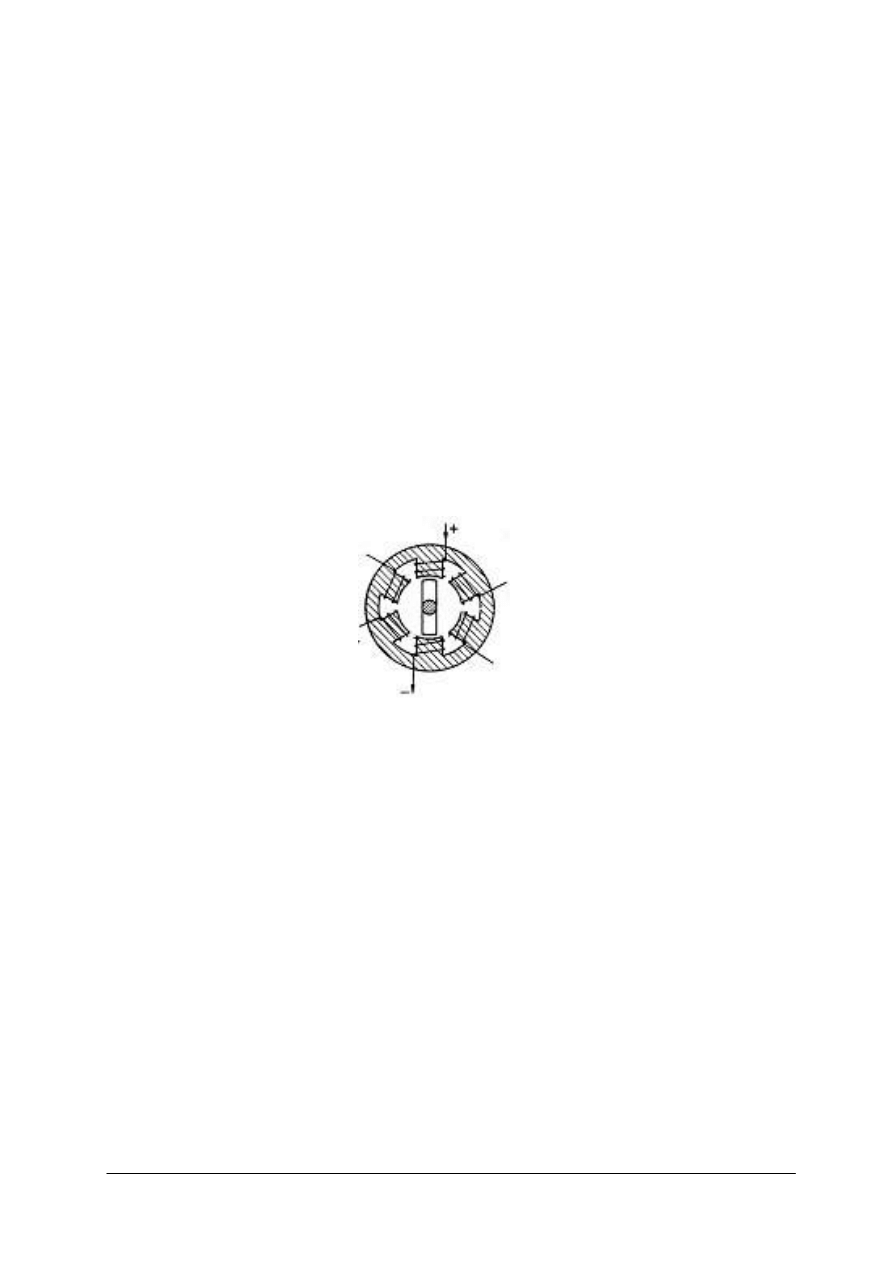
Roboty usługowe
Usługi są kolejnym obszarem gdzie mogą być z powodzeniem stosowane roboty. Obecnie
trwają pracę nad robotami mającymi zastąpić ludzi w wielu dziedzinach, jak na razie są to raczej
ciekawostki niż roboty użytkowe. Głównym problemem przy budowie takiego robota jest
stworzenie oprogramowania, które zapewniałoby poprawną interakcję z otoczeniem. Przez
usługi dla ludzi rozumie się działanie robotów na rzecz zapewniania bezpieczeństwa ludzi oraz
dostarczanie rozrywki, natomiast usługi użyteczne dla sprzętu rozumiane są tu jako
serwisowanie, dokonywanie napraw oraz czyszczenie. Innym przeznaczeniem tego typu robotów
jest pełnienie dodatkowych autonomicznych funkcji takich jak inspekcja, transportowanie oraz
pozyskiwanie danych. Pierwszym przykładem zilustrowanym na rys. 41 a jest robot, który
pomaga w utrzymaniu niezależności ludzi starszych, którzy mają problemy z samodzielnym
poruszaniem się po pomieszczeniach.
a) b)
Rys. .41. Roboty usługowe.[23] a) pomagający ludziom w przemieszczaniu się, b) robot medyczny
Przedstawiony na rys. 41 b robot medyczny posiada manipulator o 6 stopniach swobody
oraz układ sterowania współpracujący ze stacją graficzną do wykonywania wizualizacji
i programowania. Może on między innymi przenosić mikroskop chirurgiczny, a jego ruchy mogą
być wcześniej zaprogramowane lub sterowane ręcznie za pomocą odpowiedniego urządzenia
lub głosu.
Innym przykładem robota usługowego jest robot wykonujący operacje tankowania paliwa.
rys.43 a. Kierowca wprowadza kartę, kod PIN oraz szczegóły dotyczące zamówienia. Robot
lokalizuje samochód, odchyla klapę oraz odkręca korek wlewu i wprowadza głowicę tankującą.
Robot na podstawie zamówienia tankuje zadaną ilość paliwa o odpowiedniej liczbie oktanów.
Kolejnym przykładem jest robot "Skywash" przedstawiony na rys.42 b, którego zadaniem
jest czyszczenie samolotów. Robot ten łączy w sobie wszystkie cechy zawansowanych
systemów wykorzystywanych w robotyce: przygotowanie oraz zaprogramowanie ruchów przy
pomocy trójwymiarowych modeli samolotu, lokalizacja obiektów poprzez sensory, kontrola
ruchów robota poprzez zainstalowane czujniki siły.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
37
a) b)
Rys. 42. Roboty usługowe [23] a) do tankowania samochodów, b) do mycia samolotów.
Struktura kinematyczna robotów i maszyn manipulacyjnych
Jednostkę kinematyczną manipulatora (robota) tworzy mechanizm kinematyczny wraz
z dołączonymi
napędami.
Mechanizmem
kinematycznym
jest
połączenie
dwóch
współpracujących ze sobą ruchomych elementów. Elementy te mogą wykonywać ruch względny
obrotowy (para kinematyczna obrotowa) lub ruch liniowy (para kinematyczna postępowa).
Elementy tworzące parę kinematyczną z dołączonym napędem pozwalają na realizację ruchów
względnych elementów pary kinematycznej, tworzą zespół ruchu.
W każdym zespole ruchu oprócz napędu (silnika, siłownika) występuje również układ
pomiarowy parametrów ruchu (położenia, prędkości i przyspieszenia, przemieszczenia).
Zadaniem napędów jest wprawianie w ruch poszczególnych zespołów układu
kinematycznego i efektora końcowego zgodnie z potrzebami wynikającymi z programu pracy
maszyny manipulacyjnej. Dla każdej pary kinematycznej stosuje się odrębny napęd. Układy
napędowe maszyn manipulacyjnych są z reguły zasilane energią przetworzoną w odrębnym
układzie zasilania (energia elektryczna, hydrauliczna, pneumatyczna). Z reguły do napędu
robotów stosowany jest napęd elektryczny. W przypadkach, gdy potrzebna jest bardzo duża moc
napędu lub w środowiskach zagrożonych eksplozją wykorzystywany jest napęd hydrauliczny.
Napędy pneumatyczne stosowane są sporadycznie, tylko w bardzo prostych robotach.
Napędy maszyn manipulacyjnych posiadają specyficzne właściwości odrόżniające
je od napędόw innych maszyn technologicznych. Kilka z nich podano poniżej.
1. Maszyny manipulacyjne posiadają kilka stopni swobody, każdemu z tych stopni
przyporządkowany jest odrębny zespόł napędowy; w celu zrealizowania przez maszynę
konkretnego ruchu konieczne jest jednoczesne działanie kilku napędόw.
2. Zakres obciążeń poszczegόlnych napędόw zmienia się w szerokim przedziale. Najczęściej
obciążenia mają charakter dynamiczny, co ma decydujący wpływ na dobór rodzaju napędu.
3. Wymagana jest duża dokładność pozycjonowania elementu roboczego (efektora), szybkie
ruszanie oraz hamowanie. Odtwarzanie żądanej trajektorii lub żądanej pozycji powinno być
zrealizowane bardzo dokładnie. Biorąc pod uwagę to, że maszyna manipulacyjna zawiera
kilka par kinematycznych, od napędu wymagana jest wysoka dokładność.
4. Wymagana jest możliwość pracy maszyny manipulacyjnej przy znacznych obciążeniach
dynamicznych i w nieustalonych warunkach eksploatacji.
5. Napędy pracują długotrwale w stanie bezruchu elementu roboczego.
Ważnymi elementami składowymi zespołów ruchu są przekładnie ruchu, których zadaniem
jest dostosowywanie parametrów i rodzaju ruchu do potrzeb danego członu jednostki
kinematycznej (zmiana prędkości ruchu elementu wykonawczego lub zamiana ruchu
obrotowego na ruch liniowy, ewentualnie ruchu liniowego na obrotowy).
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
38
Napędy elektryczne robotόw przemysłowych
Stosowane są:
1. napędy prądu stałego z wysokomomentowymi komutatorowymi silnikami prądu stałego,
oraz bezszczotkowymi silnikami prądu stałego,
2. napędy prądu przemiennego z silnikami indukcyjnymi i synchronicznymi,
3. napędy z silnikami skokowymi (krokowymi), (rys.43).
Najczęściej stosowane są napędy prądu przemiennego, a zwłaszcza indukcyjne silniki prądu
przemiennego. Wchodzą one w skład tzw. układόw napędowych AC – CNC, ktόre oprόcz
silnika zawierają rόwnież zespoły zasilająco–sterujące przystosowane do wspόłpracy
z mikroprocesowymi układami sterowania. Dzięki temu spełniają wymagania stawiane napędom
robotόw przemysłowych, takie jak:
1. bezstopniowa zmiana prędkości obrotowej,
2. unieruchomienie ramienia robota momentem silnika,
3. pozycjonowanie kątowe dyskretne, ciągły obrόt powiązany z innymi sterowanymi
numerycznie ruchami.
Elektryczne silniki krokowe są urządzeniami umożliwiającymi bezpośrednie przetwarzanie
cyfrowych sygnałόw sterujących na przesunięcie liniowe lub kątowe. Mogą one pracować
w otwartym układzie sterowania zapewniając przy tym dużą dokładność pozycjonowania.
Eliminują przez to potrzebę stosowania pomiarowych przetwornikόw przemieszczeń.
Rys. 43. Silnik krokowy reluktancyjny [8, s. 43]
Napędy elektrohydrauliczne
Budowane są z reguły jako serwonapędy. W skład napędu hydraulicznego robota
przemysłowego wchodzą (rys. 44):
1. zespόł zasilania hydraulicznego,
2. zespόł urządzeń sterujących przepływem cieczy roboczej (układ serwozaworόw –
wzmacniaczy elektrohydraulicznych – zapewniający zadawanie stanόw elementόw
wykonawczych napędu zgodnie z założonym programem),
3. zespόł elementόw wykonawczych napędu (siłowniki, silniki hydrauliczne).
W napędach hydraulicznych zespołόw ruchu maszyn manipulacyjnych stosuje się układy
ze zmienną wydajnością (ze zmiennym wydatkiem) oraz ciśnieniem. Układ ten, w przypadku
gdy napędy robota są nieruchome (tzn. gdy chłonność układu jest zerowa), pozwala
zminimalizować straty energetyczne układu spowodowane przelewaniem przez zawory
przelewowe nadmiaru cieczy roboczej do zbiornika.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
39
Rys. 44. Schemat hydraulicznego napędu robota [5, s.56]
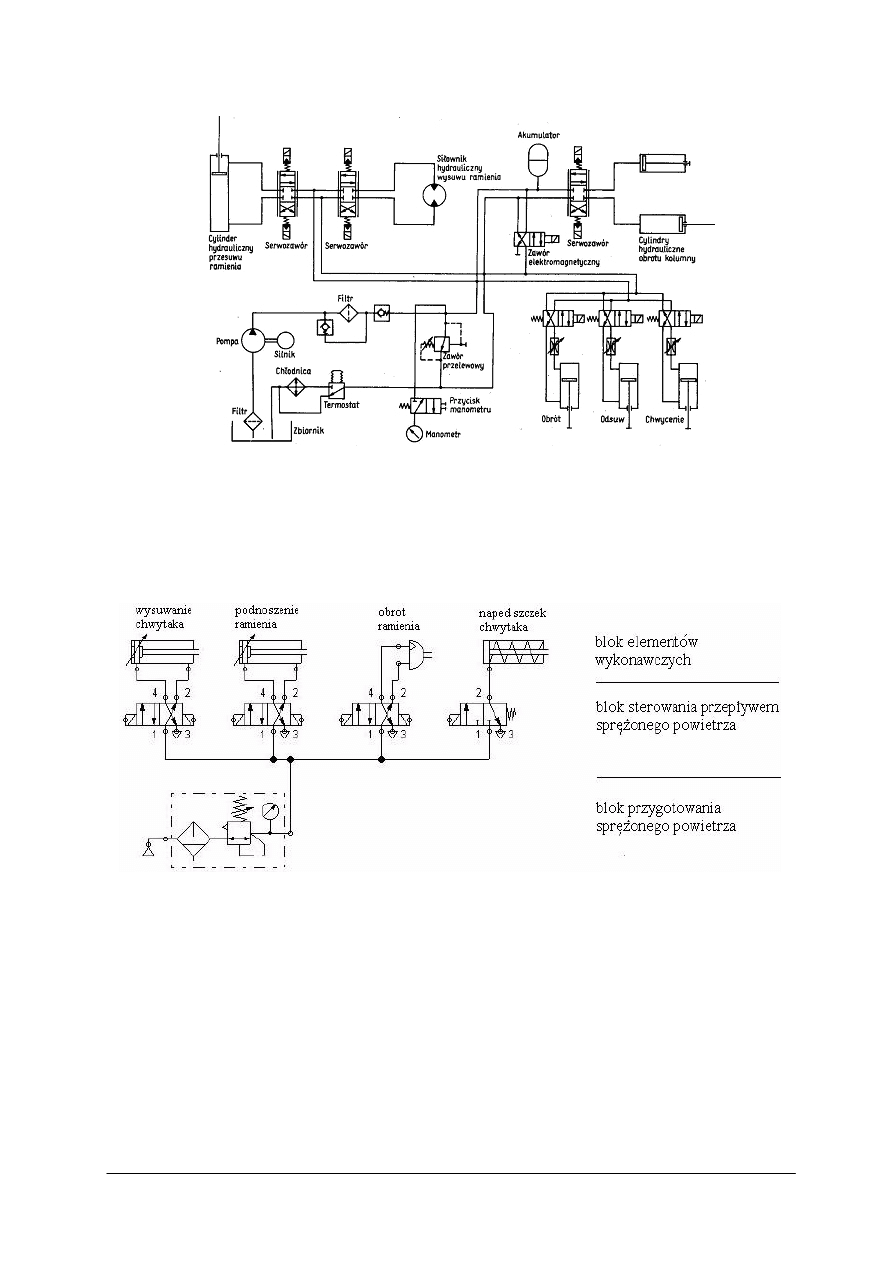
Napędy pneumatyczne
Składają się z (rys. 45):
−
bloku przygotowania czynnika roboczego (sprężonego powietrza),
−
bloku sterowania przepływem sprężonego powietrza,
−
bloku elementόw wykonawczych.
Rys. 45. Struktura napędu pneumatycznego robota
Przekładnie ruchu
Stosowane są w przypadkach:
−
dopasowania rodzaju ruchu realizowanego przez element napędowy do rodzaju ruchu
realizowanego przez człon napędzany,
−
dopasowania zakresu i prędkości ruchu realizowanego przez element napędowy do zakresu
i prędkości ruchu realizowanego przez człon napędzany.
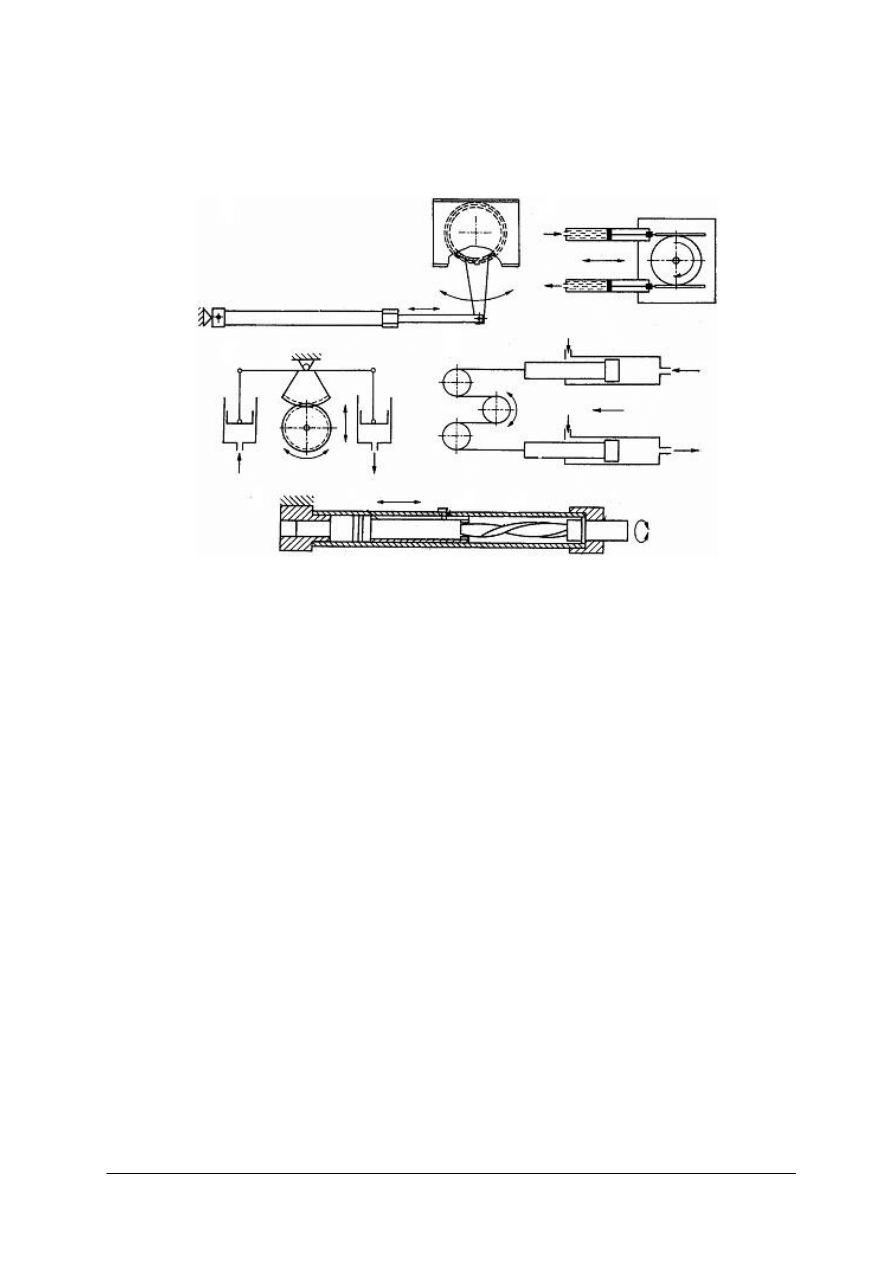
Ze względu na rodzaj ruchόw wejściowych oraz wyjściowych w zespołach napędowych
robotόw wykorzystywane są przekładnie umożliwiające zamianę następujących rodzajów ruchu:
a) przemieszczenie liniowe na obrόt (rys. 46),
b) obrόt na obrόt,
c) obrόt na przemieszczenie liniowe.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
40
Przekładnie przemieszczenie liniowe – obrόt są stosowane w przypadku zastosowania
siłownikόw liniowych do napędu obrotowych zespołόw ruchu. Przekładnie te mogą stanowić
wspόlną konstrukcję z siłownikami liniowymi tworząc siłowniki o ruchu wahadłowym, bądź
stanowić odrębne elementy konstrukcji układu napędowego zespołu ruchu.
Rys. .46. Przekładnie ruch liniowy – obrót [10, s. 140]
Najczęściej elementami napędzającymi w robotach są silniki wysokoobrotowe. Obroty
zespołόw ruchu są o wiele mniejsze, dlatego zachodzi konieczność stosowania przekładni
redukcyjnych o bardzo dużych przełożeniach (od 1: 50 do 1:500).
Powszechnie stosowane są przekładnie:
1. zębate walcowe oraz walcowo – kątowe,
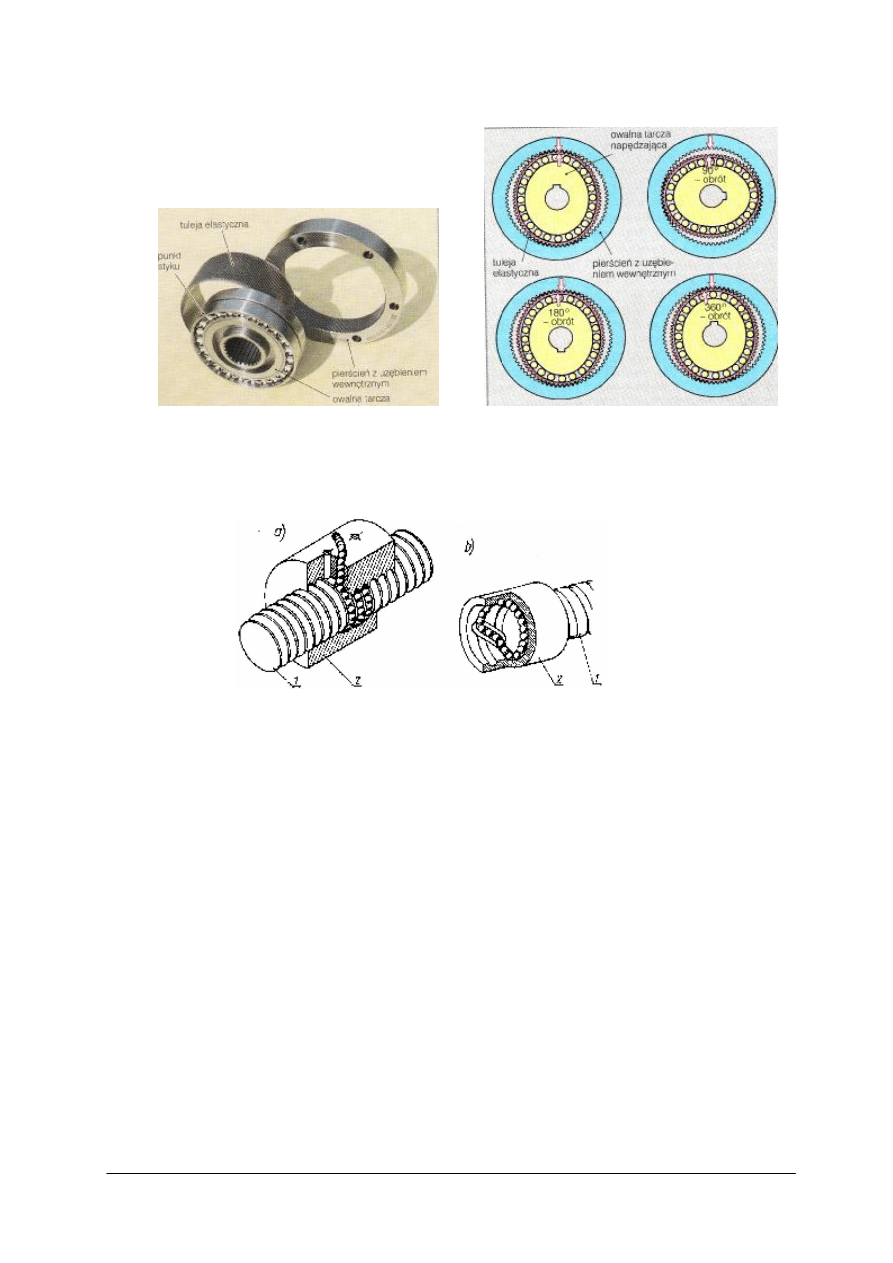
2. planetarne oraz przekładnie umożliwiające uzyskiwanie znacznych przełożeń (w jednym
stopniu 1:300) – falowe (rys. 47),
3. kształtowo–toczne.
Przekładnia falowa składa się z owalnej tarczy (generator fali) połączonej z wałkiem
napędzającym, która poprzez łożyskowanie kulkowe dociska elastyczną cienkościenną tuleję
z zewnętrznym uzębieniem do sztywnego, nieruchomego pierścienia z uzębieniem
wewnętrznym. Dzięki owalnemu kształtowi tarczy napędzającej zazębienia sztywnego
pierścienia i elastycznej tulei stykają się tylko w dwóch przeciwległych punktach. Liczba zębów
elastycznej tulei jest np. o dwa zęby mniejsza od liczby zębów sztywnego pierścienia. Jeżeli
liczba zewnętrznych zębów elastycznej tulei wynosi np. 200, a wewnętrznego uzębienia
pierścienia 202, to odtaczanie się tulei po obwodzie pierścienia przy jednym obrocie owalnej
tarczy napędzającej powoduje obrócenie się tulei o 2 zęby, a więc o 1/100 obrotu. Przełożenie
redukujące wynosi 1:100. Przekładnie falowe mają prostą i zwartą budowę, są lekkie,
charakteryzują się dużą sprawnością (więcej niż 80%), nie mają luzów, wymagają stosunkowo
niewielkiej przestrzeni do zabudowy.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
41
a) b)
Rys. 47. Przekładnia falowa. a) części składowe, b) zasada działania [13, s. 277]
Jako przekładnie obrόt – przemieszczenie liniowe stosowane są przekładnie śrubowe,
zwłaszcza przekładnie śrubowo – toczne (rys. 48).
Rys. 48. Budowa przekładni śrubowo – tocznej: a) z zewnętrznym obiegiem kulek, b) z wewnętrznym obiegiem
kulek [10, s. 142]
Przekładnie stosowane w zespołach ruchu jednostek kinematycznych maszyn
manipulacyjnych powinny spełniać następujące wymagania:
−
wysoka dokładność przenoszenia ruchu,
−
bezluzowość,
−
małe momenty bezwładności wirujących mas,
−
duża sztywność skrętna.
Układy pomiarowe położenia i przemieszczenia zespołόw ruchu maszyn manipulacyjnych
Informacje generowane przez te układy umożliwiają regulację położenia organu
wykonawczego serwonapędu.
W strukturze funkcjonalnej układu pomiarowego położenia i przemieszczenia występują:
−
czujnik pomiarowy przekształcający parametr ruchu (przemieszczenie, prędkość) na inną
wielkość fizyczną,
−
układ zasilająco–przekształcający (przetwornik) – układ umożliwiający uzyskanie
elektrycznego sygnału pomiarowego.
Ze względu na specyfikę pracy jednostek kinematycznych maszyn manipulacyjnych
układom pomiarowym w nich stosowanym stawia się następujące wymagania:
−
duży zakres pomiarowy (osiągający kilka metrόw w przypadku robotόw bramowych),
−
wysoka dokładność pomiaru wynosząca dla przemieszczenia liniowego od 10
– 4
do 10
– 5
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
42
(co oznacza dokładność pomiaru 0,1 do 0,01 [mm] na długości 1[m] ), a dla przemieszczenia
kątowego 10
– 3
(tzn.1/1000 obrotu),
−
przystosowanie do pracy w warunkach trudnych, w środowiskach o dużym zapyleniu,
wysokiej temperaturze, zagrożenia wybuchem i pożarem, wibracji, dynamiczne zmiany
prędkości i przyspieszenia,
−
sygnał wyjściowy elektryczny, dogodny do dalszego przetwarzania.
Zadaniem układόw pomiarowych stosowanych w zespołach ruchu jest pomiar
przemieszczenia liniowego i kątowego (rόwnież prędkości i przyspieszeń). Najczęściej
stosowane są:
1. potencjometry pomiarowe obrotowe – układy pomiarόw absolutnych w napędach ruchu
lokalnego, np. w napędach ruchu obrotowego chwytakόw, gdy zakres obrotu nie przekracza
360
0
; negatywną właściwością potencjometrόw jest ich niska trwałość spowodowana
wycieraniem się stykόw,
2. selsyny przelicznikowe (resolwery) – selsyny są jednym z bardziej rozpowszechnionych
układόw pomiarowych ze względu na bardzo wysoką dokładność pomiaru (5 minut
kątowych, tzn. 1/1000 obrotu), dużą trwałość i niezawodność wynikającą z braku części
zużywających się (bezstykowe przekazywanie napięcia indukowanego w wirniku), prosty
układ przetwarzania sygnałόw pomiarowych, niską cenę,
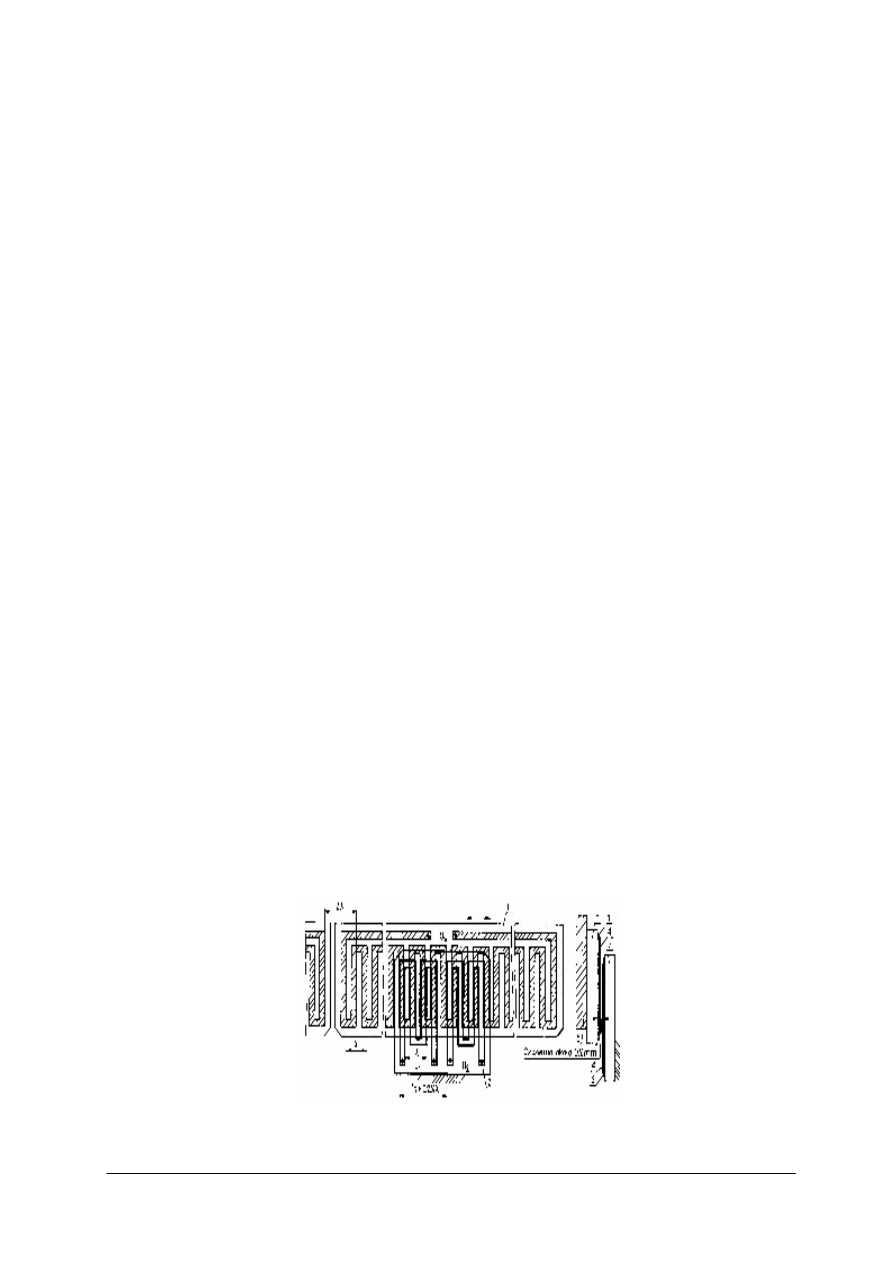
3. induktosyny liniowe i obrotowe – induktosyny są indukcyjnymi czujnikami
do bezpośredniego pomiaru przemieszczeń liniowych (induktosyn liniowy) (rys. 49)
lub kątowych (induktosyn obrotowy); dokładność induktosynόw liniowych wynosić może
± 2,5 [μm], a induktosynόw obrotowych ± 3
′
,
4. fotoelektryczne przetworniki impulsowe – mogą być wykorzystywane do pomiaru
przemieszczenia kątowego (przetwornik obrotowo–impulsowy) oraz przemieszczenia
linowego (liniał kreskowy – zakres pomiarowy do 3 m).
Zalety fotoelektrycznych przetwornikόw impulsowych:
−
wysoka niezawodność działania, odporność na zakłόcenia,
−
prosty montaż i ochrona przed zanieczyszczeniami,
−
wysoka rozdzielczość (do 1/5000 obrotu, zwykle 1/1000),
−
wysokie dopuszczalne parametry ruchu (prędkość, przyspieszenie),
−
niski koszt.
Resolwer przypomina silnik elektryczny. (rys. 50). Ma on twornik i uzwojenia pola.
Pojedyńcze uzwojenie twornika jest zasilane napięciem prądu przemiennego. Dwa uzwojenia
pola są przesunięte wzajemnie o 90°. Dwa wyjścia będą generować fale sinusoidalne
i cosinusoidalne, których poziom napięcia zmienia się zależnie od pozycji wirnika resolwera.
Obwód elektryczny (konwerter resolwera) porównuje te dwie fale i przekształca napięcia pola
w sygnał analogowy, proporcjonalny do kąta wirnika. Dokładność resolwerów wynosi zwykle
od 2 do 20 minut kątowych.
Rys. 49. Induktosyn liniowy [10, s. 159]
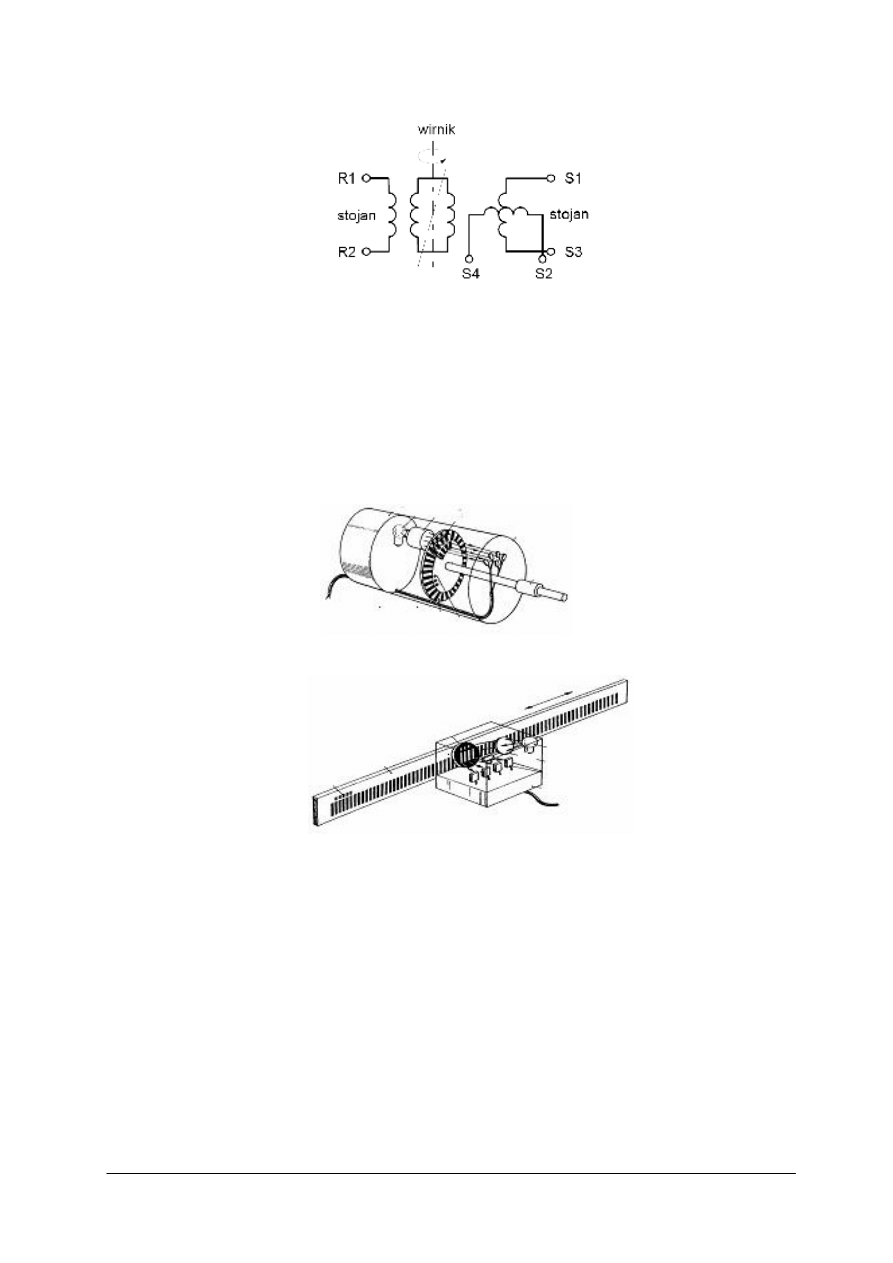
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
43
Rys. 50. Schemat ideowy resolwera [3,s. 44]
Fotoelektryczne przetworniki impulsowe
Fotoelektryczne przetworniki kodowe budowane są jako przetworniki do pomiaru
przemieszczenia kątowego (rys. 51) oraz przemieszczenia liniowego (rys. 52). Stosowane są
tam, gdzie konieczne jest użycie układu pomiarowego absolutnego o wysokiej dokładności.
Najważniejszą cechą liniałów i tarcz kodowych jest trwałe zapamiętywanie zmierzonego
położenia. Wyłączanie sterowania lub chwilowy zanik napięcia zasilającego nie powoduje utraty
informacji. Zastosowanie przetworników kodowych nie wymaga najazdu na punkt bazowy
(referencyjny) po każdorazowym uruchomieniu robota.
Rys. 51. Zasada działania fotoelektrycznego przetwornika obrotowo – impulsowego [5, s. 86]
Rys. 52. Zasada działania fotoelektrycznego liniowego przetwornika impulsowego [8, s. 50]
Urządzenia chwytające i narzędzia układόw manipulacyjnych i robotόw
Maszyny manipulacyjne, niezależnie od ich przeznaczenia, wyposażone są w odpowiednie
końcόwki manipulacyjne zwane efektorami końcowymi. W przypadku maszyn manipulacyjnych
przeznaczonych do zadań transportowych efektorami są chwytaki. Transportowanie obiektu
składa się z trzech faz:
−
pobranie (uchwycenie) obiektu z miejsca składowania,
−
trzymanie obiektu podczas jego przemieszczania,
−
uwolnienie obiektu w miejscu przeznaczenia.
Każda z tych faz wiązać się może z realizacją wielu operacji rozpoznania obiektu
manipulacji, określenia jego pozycji i zorientowania oraz przemieszczenie członόw
mechanizmu chwytaka powodujące uchwycenie obiektu.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
44
Poprawne uchwycenia obiektu manipulacji zależne jest od:
−
sposobu unieruchomienia obiektu w chwytaku,
−
parametrόw obiektu manipulacji,
−
wzajemnego początkowego ustawienia chwytaka i obiektu,
−
warunkόw dynamicznych procesu manipulacji.
Sposόb unieruchomienia powinien zagwarantować niezmienność położenia obiektu
względem chwytaka w czasie trwania procesu manipulacji. Parametry obiektu manipulacji
(np. kształt i gabaryty, masa, rodzaj materiału, odporność na naprężenia zewnętrzne, gładkość
powierzchni) mają wpływ na konstrukcję chwytaka – siłę zacisku, sposόb przemieszczania
szczęk, zastosowanie odpowiednich czujnikόw. Przy niedokładnym wzajemnym początkowym
ustawieniu chwytaka i obiektu mogą wystąpić podczas chwytania niepożądane obciążenia, ktόre
mogą być przejmowane przez obiekt, jednostkę kinematyczną maszyny manipulacyjnej oraz
urządzenia wspόłpracujące i stanowić zagrożenie dla poprawnej pracy robota. Warunki
dynamiczne procesu manipulacji (rodzaj wykonywanych ruchόw oraz przyspieszenia) powodują
znaczne zmiany wartości oraz kierunku i zwrotu sił wypadkowych działających na obiekt.
Poprawne uchwycenie polega na unieruchomieniu obiektu w najbardziej niekorzystnych
warunkach dynamicznych.
Trzymanie obiektu w czasie procesu manipulacji może wiązać się z:
−
kontrolą obecności obiektu w chwytaku,
−
kontrolą poprawności osadzenia obiektu w chwytaku,
−
regulacją siły chwytu.
Uwolnienie obiektu w miejscu przeznaczenia może wiązać się z:
−
koniecznością rozpoznania miejsca, w ktόrym obiekt manipulacji ma być umieszczony,
−
koniecznością pomiaru i ewentualnie sterowania sił i momentόw powstających na skutek
zetknięcia się przemieszczanego obiektu z podłożem.
Wyrόżnić można dwa podstawowe sposoby oddziaływania chwytaka na obiekt manipulacji:
−
przez wytworzenie pola sił działających na obiekt – chwytanie siłowe,
−
przez wytworzenie połączeń pomiędzy elementami chwytaka i obiektem pozbawiającymi
obiekt chwytany wszystkich stopni swobody – chwytanie kształtowe.
W przypadku chwytania siłowego siły oddziałujące na obiekt manipulacji mogą być typu:
−
naprężającego (ściskające lub rozciągające),
−
przyciągającego (adhezyjnego).
Chwytaki realizujące chwytanie kształtowe oraz siłowe naprężające nazywane
są chwytakami mechanicznymi, natomiast chwytakami realizującymi chwytanie adhezyjne
są chwytaki podciśnieniowe oraz magnetyczne.W chwytakach mechanicznych stosowany może
być napęd pneumatyczny, hydrauliczny lub elektryczny. Wspόłcześnie duże znaczenie ma napęd
elektryczny.
Elementami wykonawczymi chwytakόw mogą być rόwnież elastyczne końcόwki chwytne.
Elastyczne końcόwki chwytne wykonywane są ze specjalnie profilowanego elastomeru
lub gumy i zmieniają swόj kształt pod wpływem ciśnienia sprężonego powietrza (lub cieczy
roboczej) podawanego do ich wnętrza. Chwytaki z elastycznymi końcόwkami chwytnymi
(rys. 53) są często stosowane z uwagi na ich zalety, takie jak:
1. możliwość chwytania przedmiotόw kruchych, o delikatnych ściankach, skomplikowanych
kształtach,
2. możliwość budowania chwytakόw z wieloma końcόwkami chwytnymi, dzięki czemu są one
bardziej uniwersalne,
3. możliwość nastawiania wartości siły chwytu dzięki nastawieniu odpowiedniej wartości
ciśnienia sprężonego powietrza lub cieczy roboczej,
4. niski koszt wykonania, prosty montaż, prosta wymiana zużytych elementόw.
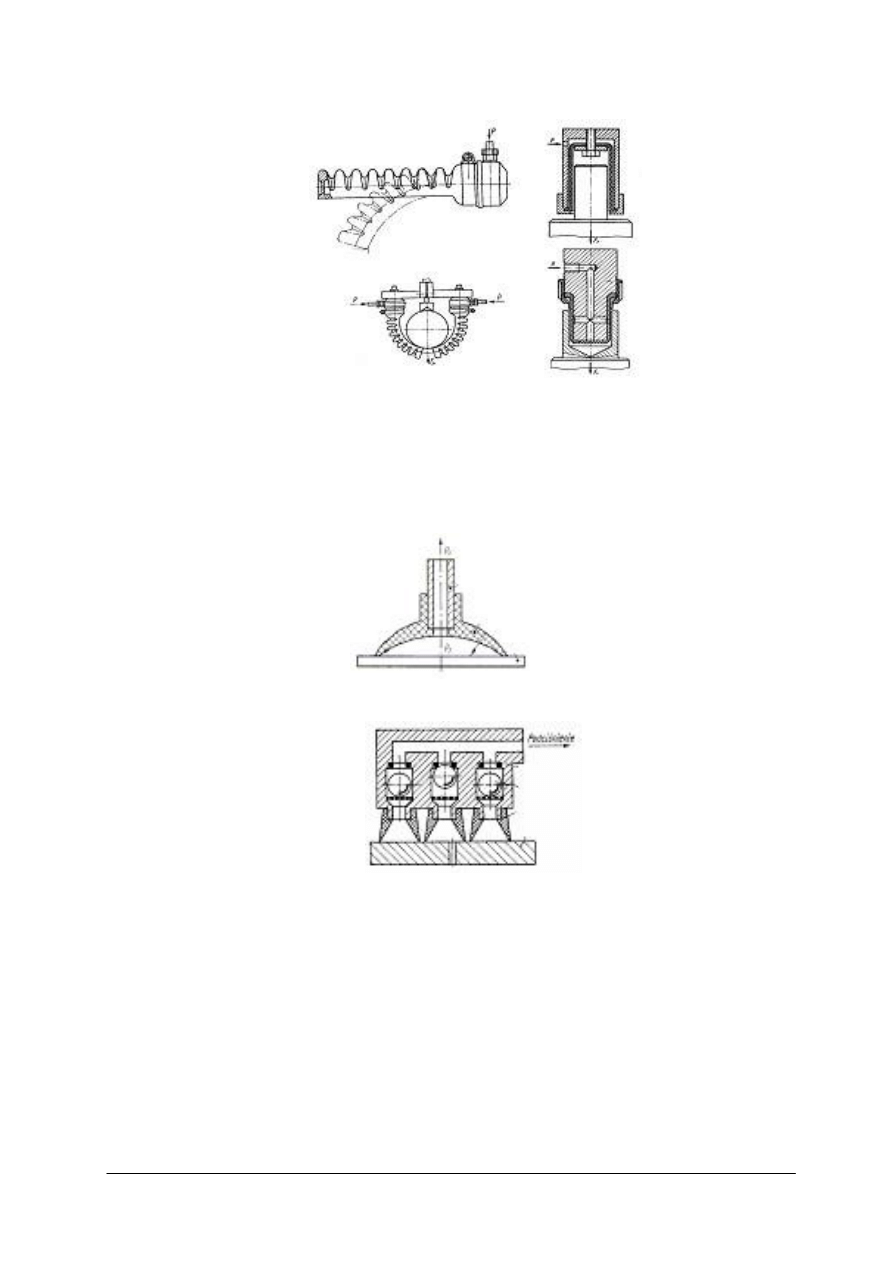
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
45
Rys. 53. Zasada budowy i działania chwytakόw z elastycznymi końcόwkami [10, s. 85, 86]
Chwytaki podciśnieniowe (próżniowe)
Chwytaki podciśnieniowe (prόżniowe) (rys. 54, rys. 55) wykorzystują zasadę powstania siły
dzięki istnieniu podciśnienia w przestrzeni ograniczonej powierzchnią obiektu manipulacji
i czaszą elestycznej przyssawki. Podciśnienie w komorze przyssawki wytwarzane jest
przez strumienice gazowe (iniektory) lub przez tłokowe lub wirnikowe pompy prόżniowe.
Rys. 54. Zasada budowy chwytaka prόżniowego [10, s. 87]
Rys. 55. Trόjprzssawkowy chwytak podciśnieniowy z zaworami doszczelniającymi [10, s. 90]
W celu zwiększenia pewności chwycenia stosuje się kilka (co najmniej trzy) przyssawki
zamocowane w jednym korpusie posiadające wspόlny kolektor podciśnieniowy z zaworami
kulowymi gwarantującymi doszczelnienie kolektora podciśnieniowego. Ze względu na prostotę
konstrukcji, mały ciężar, niski koszt chwytaki podciśnieniowe są powszechnie stosowane.
W chwytakach magnetycznch (rys. 56, rys. 57) pole sił działających na obiekt manipulacji
wytwarzany jest w dwojaki sposόb: przez magesy trwałe lub przez elektromagnesy.
Ograniczenia stosowania chwytakόw magnetycznych są następujące:
–
możliwość chwytania wyłącznie obiektόw ferromagnetycznych,
–
gwałtowne przemieszczanie się obiektu manipulacji podczas zbliżania się chwytaka (zmiana
położenia początkowego obiektu),
–
występowanie magnetyzmu szczątkowego powodujące przyciąganie drobin metalowych
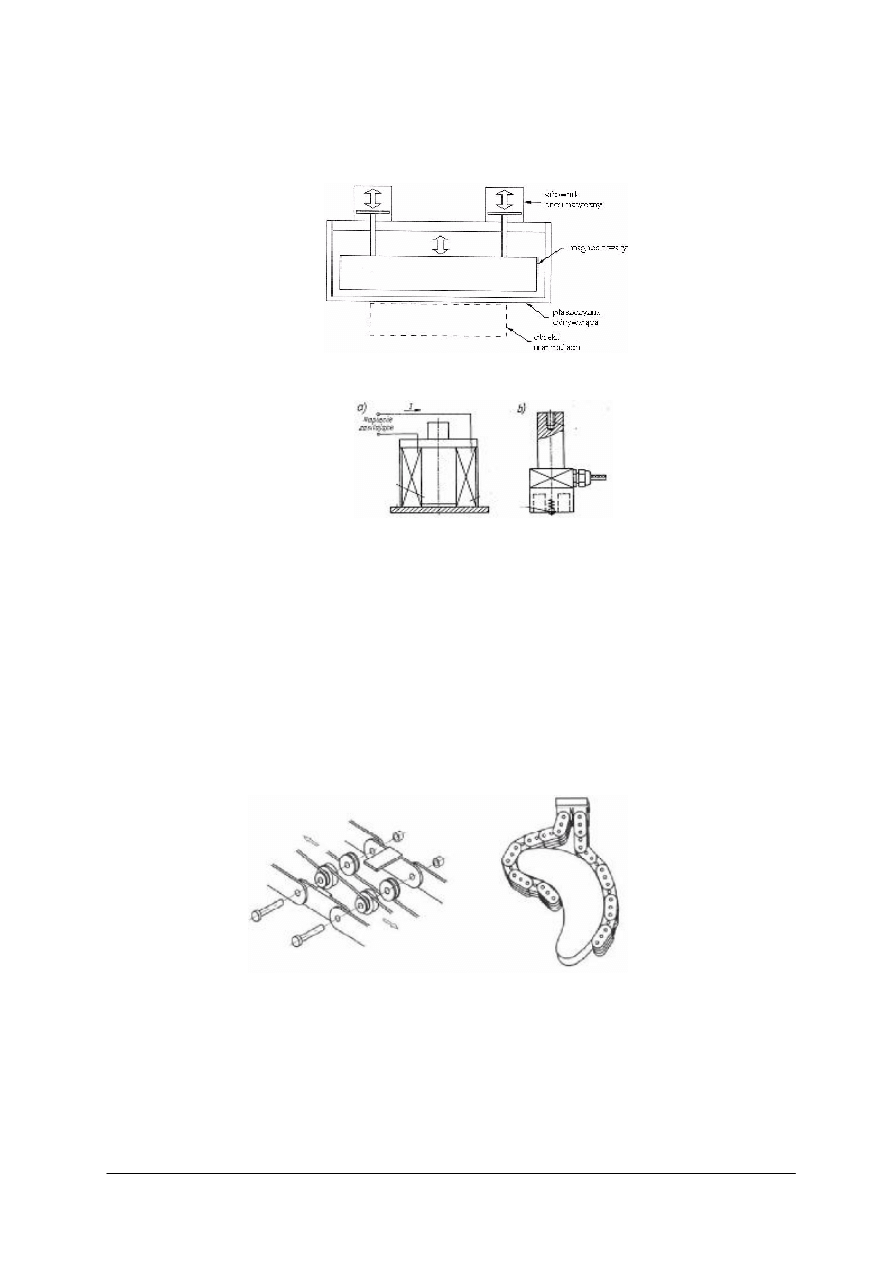
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
46
oraz trudności w uwalnianiu obiektu,
–
zmniejszanie się siły chwytu z powodu zabrudzenia powierzchni uchwytu,
–
wydzielanie się dużej ilości ciepła w uzwojeniach elektromagnesu.
Rys. 56. Zasada działania chwytaka z magnesem trwałym. [20]
Rys. 57. Chwytak elektromagnetyczny.[8, s. 30]
Chwytaki kształtowe
Uchwycenie obiektu manipulacji przez chwytak kształtowy następuje poprzez wytworzenie
połączeń pomiędzy elementami chwytaka, a obiektem i pozbawienia obiektu możliwości
wykonania ruchu względem elementόw chwytających. Najprostszym i typowym przykładem
konstrukcji chwytaka kształtowego (rys. 58) jest wyposażenie chwytaka mechanicznego
w końcόwki chwytne o kształcie odpowiadającym kształtowi powierzchni chwytanego obiektu.
Chwytaki kształtowe znajdują zastosowanie przy manipulowaniu:
−
obiektami kruchymi, wiotkimi, o powierzchni pokrytej powłokami wykluczającymi
wywieranie jakiegokolwiek nacisku,
−
obiektami o dużej masie, kiedy niezbędne jest wytworzenie bardzo dużych sił chwytu,
−
obiektami o bardzo złożonym kształcie.
Rys. 58. Przykład chwytaka kształtowego [8, s. 28]
Układy sensoryczne stosowane w układach manipulacyjnych i robotach
Maszyna manipulacyjna pracuje w pewnym środowisku (otoczeniu innych urządzeń
oraz zdarzeń). Wyrόżnić można dwie struktury powiązań maszyny manipulacyjnej
ze środowiskiem:
−
otwartą – środowiskowo–niezależną,
−
zamkniętą – środowiskowo–zależną.
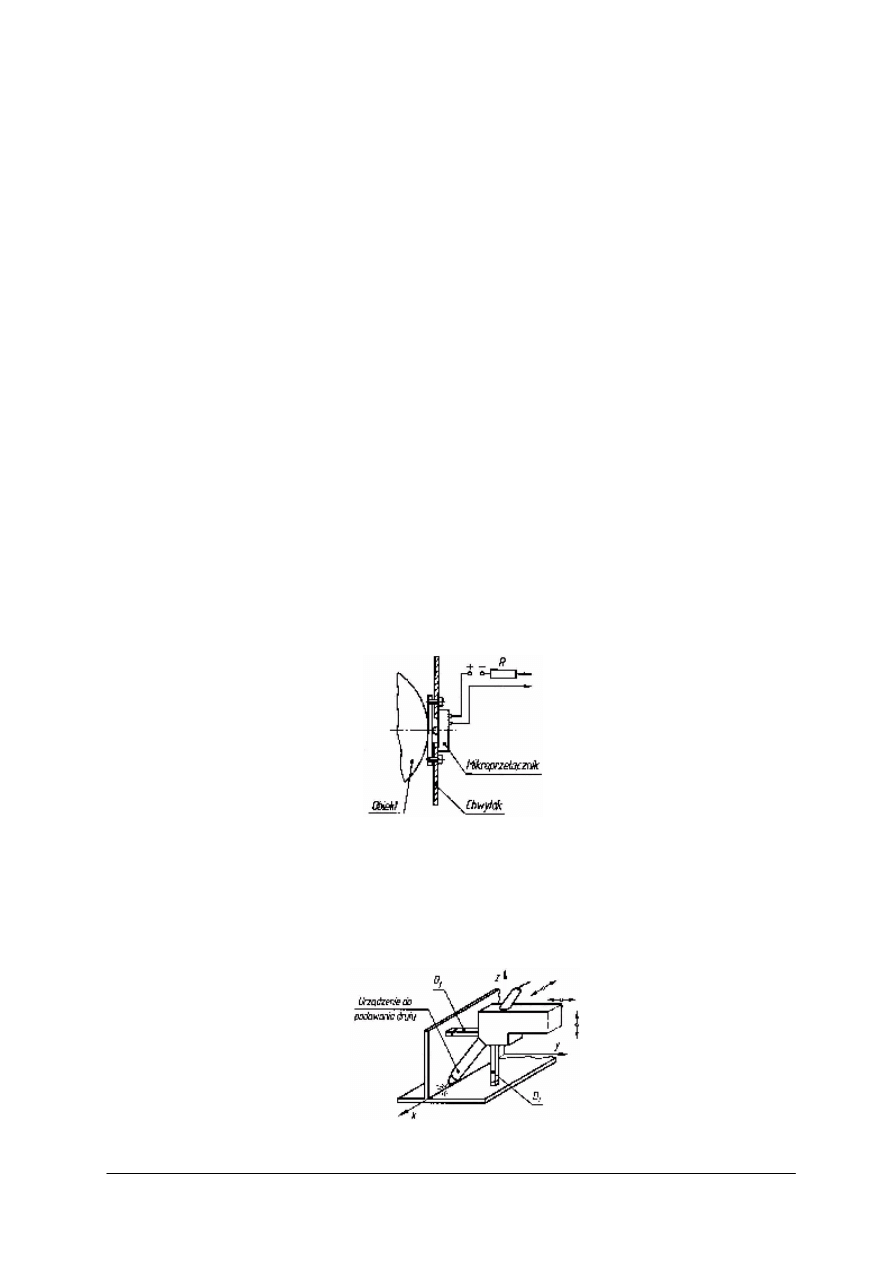
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
47
W przypadku powiązań otwartych, środowisko jest odpowiednio przygotowane, zapewnione
są niezmienialne jednakowe dla każdego cyklu warunki pracy. W przypadku powiązań
zamkniętych maszyna manipulacyjna poprzez urządzenia i układy sensoryczne rozpoznaje
środowisko i wypracowuje sygnały umożliwiające podejmowanie decyzji o realizacji zadań
adekwatnie do stanu środowiska. Urządzenia sensoryczne rozmieszczone mogą być na jednostce
kinematycznej robota, chwytaku lub w określonych miejscach stanowiska produkcyjnego
oraz maszynach i urządzeniach technologicznych. Układ sensoryczny ma wygenerowć
informacje, na podstawie ktόrych układ sterowania wypracowuje decyzje sterownicze nie tylko
dla samej jednostki kinematycznej i efektora, ale rόwnież dla wszystkich elementόw i urządzeń
tworzących stanowisko produkcyjne. Znaczące zastosowanie mają następujące urządzenia
i układy sensoryczne:
−
taktylne – zastępujące zmysł dotyku,
−
wizyjne – zastępujące zmysł wzroku.
Typowe zadania układόw i urządzeń taktylnych dotyczą:
−
pomiarόw i sterowania parametrami chwytania lub obrόbki,
−
rozpoznawania położenia i zorientowania obiektu manipulacji, rozpoznania umiejscowienia
obiektu manipulacji,
−
zabezpieczenia efektorόw przed kolizją.
Dla realizacji zadań układόw i urządzeń taktylnych najczęściej stosuje się:
−
czujniki stykowe,
−
czujniki zbliżeniowe,
−
przetworniki siły i naprężeń,
−
przetworniki typu „sztuczna skόra”.
W czujniki stykowe (sensory mikroprzełącznikowe) wyposażane są chwytaki robotόw
dzięki czemu możliwe jest zabezpieczenie chwytakόw przed kolizją, wykrywanie obecności
obiektόw w chwytaku lub w miejscu składowania, wyszukiwanie wolnych miejsc na stanowisku
składowania (rys. 59).
Rys. 59. Sensor mikroprzełącznikowy [8, s. 56]
Czujniki zbliżeniowe służą do wykrywania przeszkόd znajdujących się na torze ruchu
członόw jednostki kinematycznej oraz chwytaka lub na określaniu odległości od tych przeszkόd.
Najczęściej stosowane są czujniki:
−
indukcyjne (rys. 60),
−
ultradźwiękowe (rys. 61),
−
optyczne(rys. 62–64).
Rys. 60. Przykład zastosowania czujnikόw indukcyjnych do śledzenia styku spawanych blach [8, s. 63]
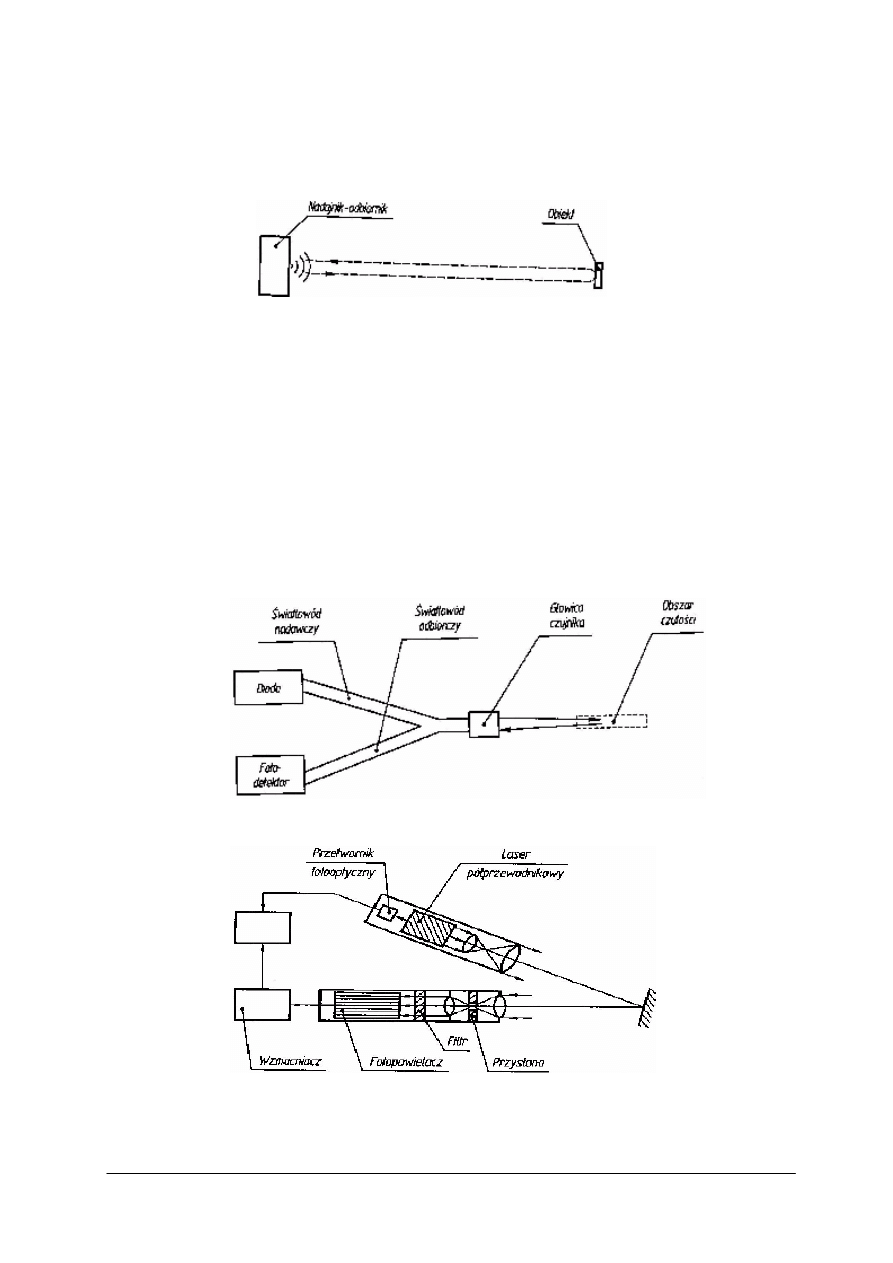
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
48
Ze względu na niewielkie gabaryty czujniki zbliżeniowe montowane są najczęściej
w chwytaku. Czujniki indukcyjne zbliżeniowe służą do detekcji obiektόw metalowych.
Czujniki ultradźwiękowe, w zależności od zakresu pomiarowgo, umożliwiają wykrycie
obecności przedmiotu (czujniki zbliżeniowe) lub dokonanie pomiaru odległości (dalmierze).
Rys. 61. Zasada pomiaru odległości dalmierzem ultradźwiękowym [8, s. 53]
Do podstawowych zalet stosowania dalmierzy ultradźwiękowych należą:
−
niezależność wyniku pomiaru od oświetlenia,
−
niska cena,
−
duży zakres pomiarowy (do klikunastu metrόw),
−
zdolność detekcji obiektόw silnie pochłaniających lub odbijających światło.
Spośrόd czujnikόw optycznych najczęściej stosowane są czujniki laserowe (do pomiaru
odległości), fotometryczne oraz światłowodowe. W czujnikach fotometrycznych źrόdło
promieniowania i detektor sprzężone są optycznie. Promienie ze źrόdła promieniowania, ktόrym
jest najczęściej dioda elektroluminescencyjna, po odbiciu od powierzchni obiektu trafiają do
fotodetektora. W układzie istnieje wspόlny obszar źrόdła promieniowania i detektora zwany
obszarem czułości. Obiekt znajdujący się w tym obszarze jest rozpoznawany przez czujnik.
Rys. 62. Zasada działania czujnika światłowodowego [8, s. 56]
Rys. 63. Zasada działania sensora laserowego [8, s. 55]
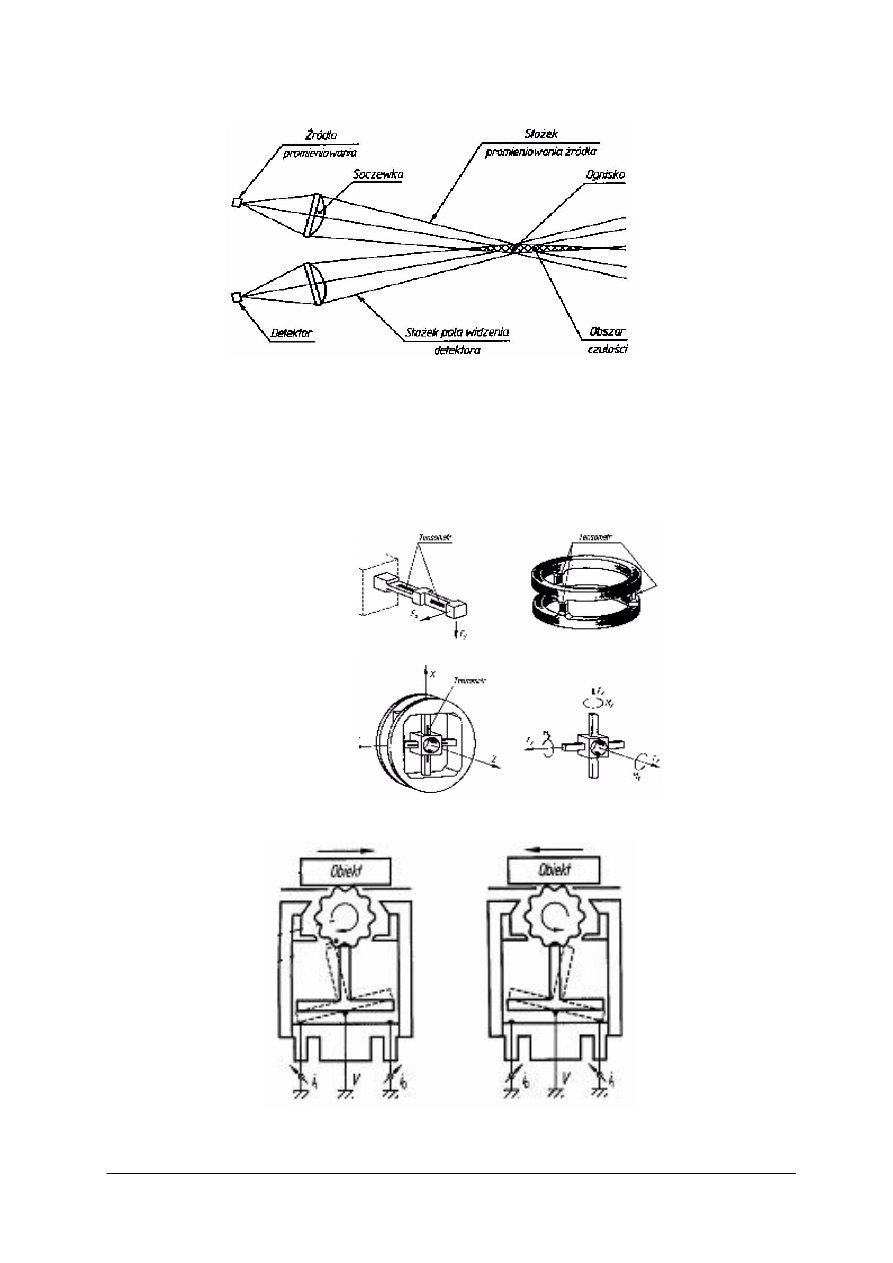
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
49
Rys. 64. Zasada działania sensora fotometrycznego [8, s. 56]
Przetworniki siły i naprężeń
Do generowania informacji o wartości siły oddziaływania chwytaka na obiekt
oraz o wartości naprężeń powstających w określonych miejscach jednostki kinematycznej
i chwytaka stosuje się przede wszystkim czujniki tensometryczno-rezystancyjne (rys. 65)
i magnetoelektryczne.
Rys. 65. Schematy budowy ternsometrycznych czujnikόw sił
i momentów [8, s. 52]
Rys. 66. Zasada działania czujnika poślizgu [8, s. 58]
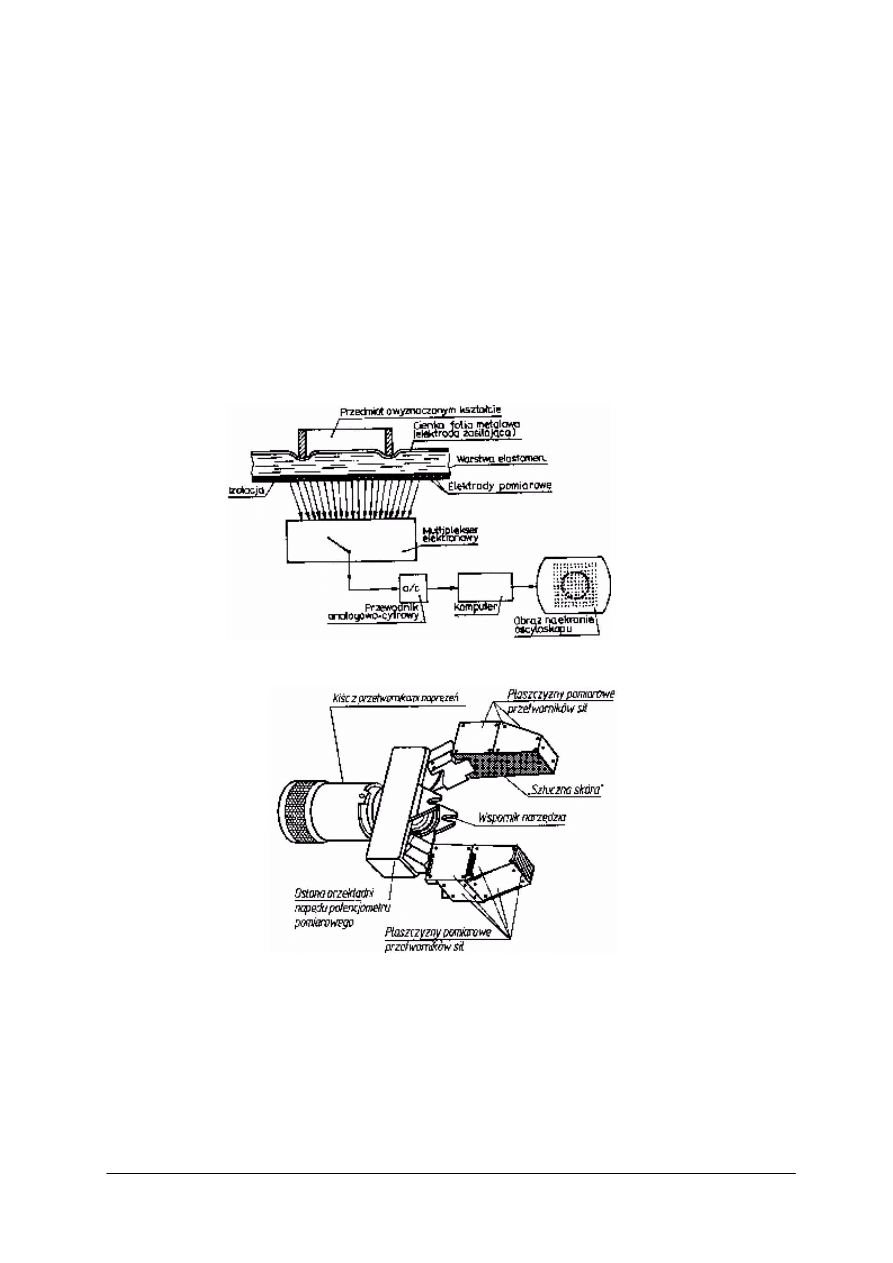
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
50
Duże znaczenie dla pewności chwycenia obiektu manipulacji przez chwytak
ma odpowiednia wartość siły chwytu. Czujnikami pomocnymi w ustaleniu właściwej wartości
siły chwytu są czujniki poślizgu (rys. 66). Właściwie chwycony obiekt nie może przemieszczać
się względem chwytaka, a do kontroli, czy to przemieszczenie występuje, służą czujniki
poślizgu.
Przetwornik dotykowy typu „ sztuczna skóra”
Najczęściej stosowane są „sztuczne skόry” wykonane z wykorzystaniem przewodzących
prąd elastomerόw (rys. 67). Efekt elastomeryczno – rezystancyjny polega na zmianie rezystancji
przejścia między dwiema elektrodami przyłożonymi do elastomeru w zależności od zewnętrznej
siły nacisku na elektrody. Zwiększenie siły nacisku powoduje zmniejszenie rezystancji przejścia
i zwiększenie prądu płynącego przez elektrody. Poszczegόlne elektrody są prόbkowane z dużą
częstotliwością przez multiplekser elektroniczny wprowadzający zakodowane binarne wartości
ich napięcia do pamięci komputera.
Rys. 67. Zasada działania sensora typu „sztuczna skóra” [5, s. 150]
Rys. 68. Przykład rozmieszczenia sensorów na chwytaku.[8, s. 58]
Przykład rozmieszczenia sensorów na chwytaku przedstawiono na rys.68.
Układy wizyjne
Dzięki układom wizyjnym stosowanym w budowie robotόw przemysłowych można:
−
wykryć obecność obiektu o określonym kształcie,
−
określić orientację obiektu w otoczeniu,
−
klasyfikować obiekty (np. określić, że jest to wałek, podkładka, itp).
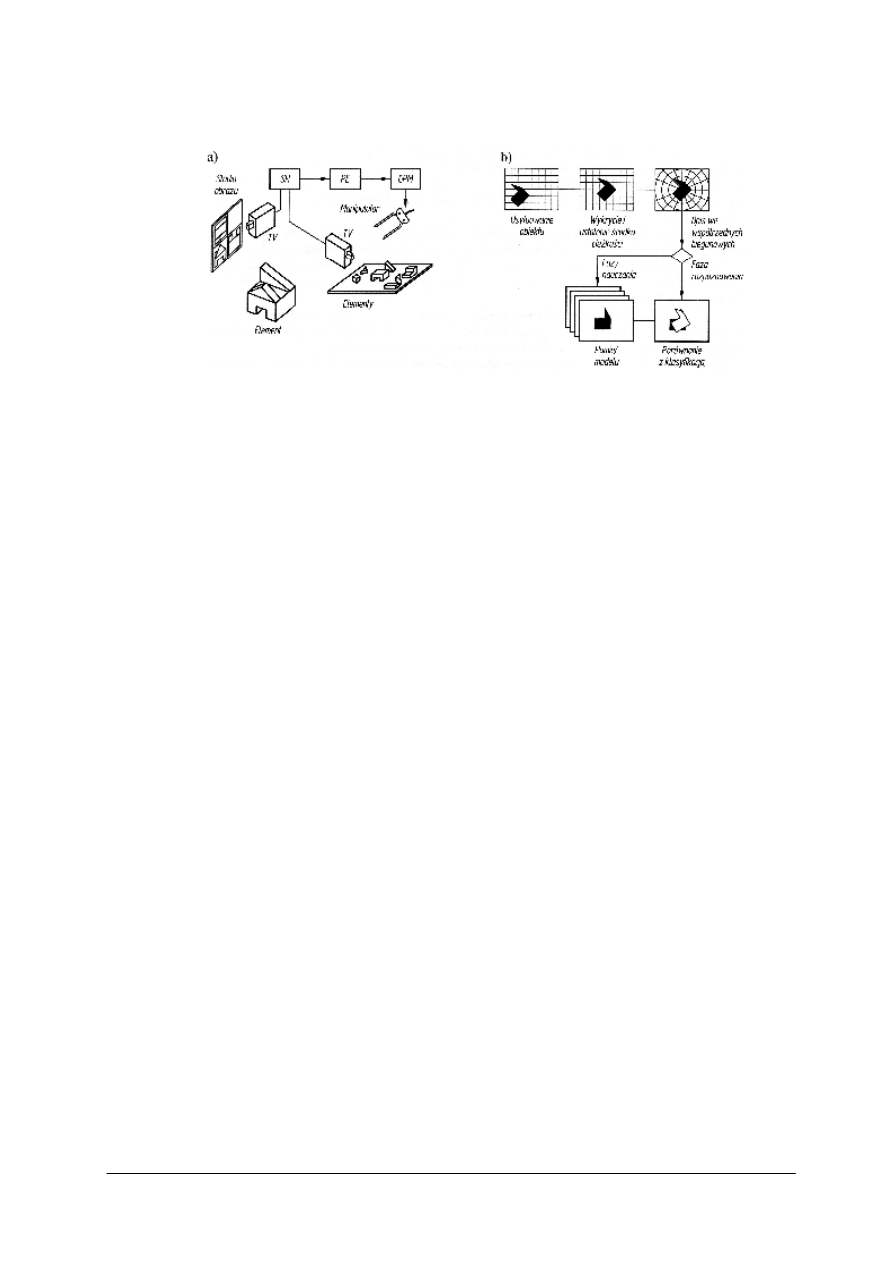
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
51
Zadaniem układu przedstawionego na rys. 69 jest montaż elementόw zgodnie z pokazanym
rysunkiem obiektu (studio obrazu).
Rys. 69. Sposób działania układu wizyjnego maszyny manipulacyjnej: a) schemat działania,
b) proces uczenia [8, s. 59]
Robot jest wyposażony w dwie kamery, z których jedna rejestruje obiekt, a druga obserwuje
wyłożone do montażu obiekty. Sygnały z kamer są przesyłane do układu rozpoznawania SR,
a stamtąd przez program przetwarzający PE do bloku GMP, gdzie jest generowany program
dla manipulatora. Obraz widziany przez kamerę jest przesyłany do komputera, gdzie określane
są kontury i następuje umieszczenie obrazu obiektu w układzie wspόłrzędnych biegunowych
(tak, aby środek ciężkości pokrył się ze środkiem układu wspόłrzędnych). Następnie ustalane
są wspόłrzędne charakterystycznych punktόw obiektu i przekazanie modelu obiektu do pamięci.
Tu następuje porόwnanie przekazanego modelu z modelami przechowywanymi w pamięci.
Programowanie robotów (rys. 70)
Stosowanymi metodami programowania obrotów są:
1. programowanie przez obwiedzenie toru ruchu (metoda Play – back),
2. programowanie przez uczenie, programowanie współrzędnych punktów toru ruchu
(metoda teach – in),
3. interaktywne programowanie graficzne.
Programowanie play – back
W przypadku zadań manipulacyjnych określanych głównie przez doświadczenie
wykonującego, np. w przypadku malowania natryskowego, racjonalnym wyborem metody
programowania jest ręczne bezpośrednie przemieszczenie narzędzia zamocowanego na robocie
po przewidzianym torze ruchu (obwiedzenie toru ruchu).
Układ sterowania zapamiętuje przy tym, co ok. 20 ms współrzędne kolejnych pumktów toru
dla wszystkich osi robota. Po przejściu w tryb normalnej pracy robot odtworzy zaprogramowany
tor ruchu. Zapamiętane w trakcie programowania wartości współrzędnych wykorzystane są
przy tym jako wartości zadane układów tregulacji położenia poszczególnych osi ruchu. Nazywa
się to programowaniem play – back. Metoda programowania jest mniej dokładna niż
programowanie metodą Teach – in, ponieważ kinematyka robota podczas ręcznego prowadzenia
narzędzia jest inaczej obciążona, niż przy automatycznym odtwarzaniu. Podczas ręcznego
prowadzenia ramię jest np. ciągnione, a podczas automatycznego odtwarzania – przez własny
napęd wysuwane.
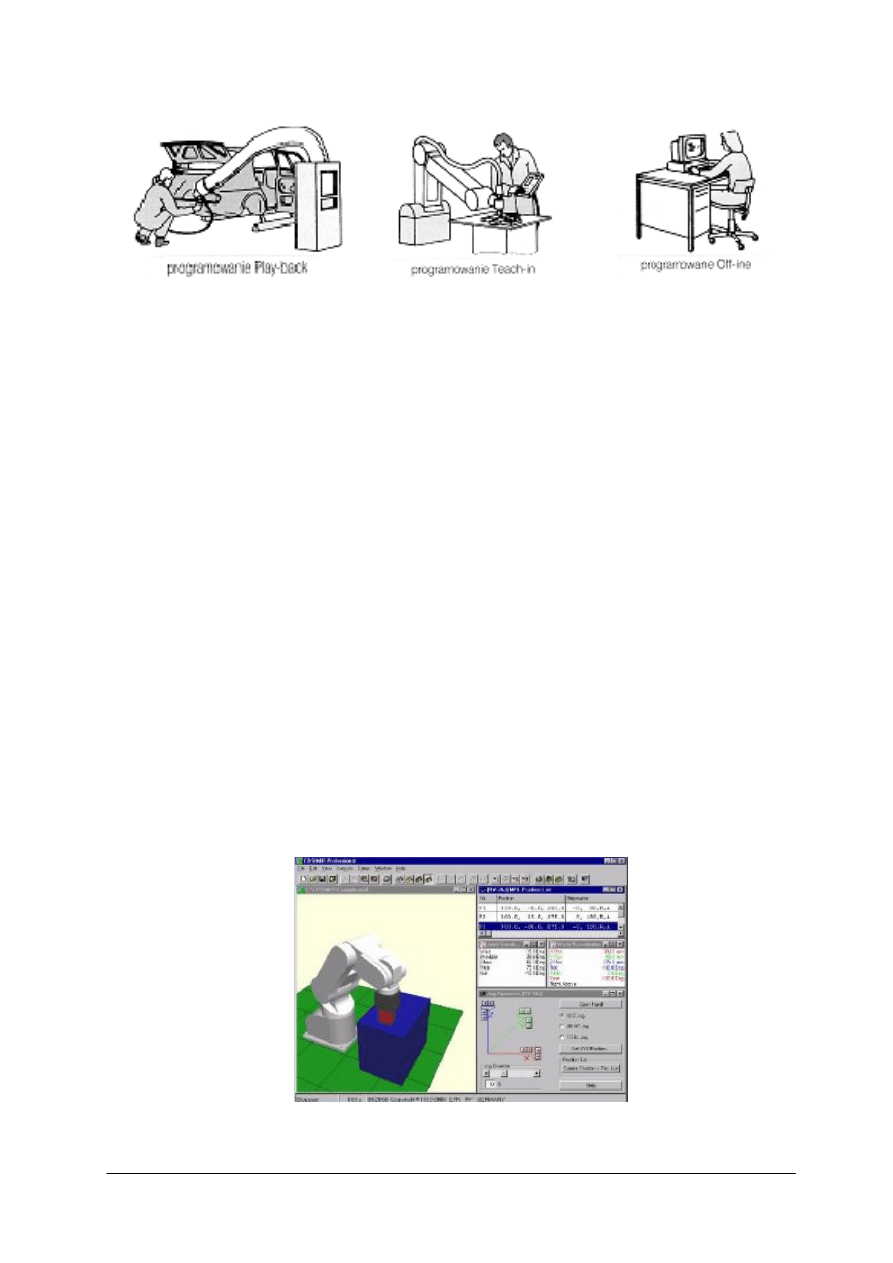
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
52
Rys. 70. Metody programowania [13, s. 279]
Następną wadą programowania typu Play – back jest, że (operator musi razem z robotem,
poruszać się w jego przestrzeni roboczej. Ta czynność ze względu na ciasnotę miejsc dostępu ,
np. przy lakierowaniu wnęk karoserii samochodu jest i niezwykle trudna i niebezpieczna
dla operatora.
Programowanie Teach – in
Podczas programowania Teach – in osie ruchu robota przemieszczane są przez operatora
za pomocą przycisków pulpitu lub drążka sterującego joy – stick do żądanego punktu toru ruchu
i lub miejsca obróbki. Możliwe jest przy tym także zaprogramowanie położenia narzędzia (jego
orientacji). Po osiągnięciu żądanego położenia i orientacji narzędzia, ich współrzędne
są zapisywane pod kolejnym numerem adresu danej procedury programu ruchu; co pozwala
na zaprogramowanie następnego położenia i orientacji narzędzia. Podczas pracy automatycznej
wszystkie zapamiętane położenia kinematyki robota będą odtworzone kolejno zgodnie z ich
wzrastającym numerem. Nauczanie położenia i orientacji odbywa się przez ręczne sterowanie
punkt po punkcie. Pozostałe rozkazy zostają zaprogramowane z pulpitu sterowania robota
lub przy pomocy komputera.
Interaktywne programowanie graficzne
W tym przypadku na stanowisku programowania zostają wytworzone – oprócz instrukcji
przebiegu programu i wszystkich instrukcji ruchu – również dane określające współrzędne
położenia i orientacji narzędzia. Programowanie odbywa się na wygodnym dla operatora
stanowisku typu CAD, z kolorową symulacją stanowiska roboczego z poruszającym się robotem
(rys. 72). Całe zadanie robota jest wirtualnie realizowane na ekranie monitora – następnie
automatycznie tworzony jest program sterowania robotem. Do sterowania ruchem robota
wirtualnego używa się takich samych instrukcji – rozkazów jak dla rzeczywistego robota
Rys. 71. Symulacja stanowiska zrobotyzowanego w programie komputerowym.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
53
Bezpieczeństwo pracy systemόw robotycznych
Wprawdzie roboty powinny wykonywać swoje zadania na stanowiskach zrobotyzowanych
bez udziału człowieka, to jednak ingerencja człowieka jest potrzebna (lub nawet konieczna):
−
w czasie programowania (uczenia) robota,
−
podczas napraw i konserwacji,
−
podczas automatycznej pracy robota, gdy w jego zasięgu znajdzie się człowiek.
W dwόch pierwszych przypadkach obecność człowieka jest niezbędna i dlatego osoby
wykonujące te czynności powinny przestrzegać określonych zasad, np. zmniejszyć prędkość
ruchu poszczegόlnych osi, zapewnić możliwość natychmiastowego wyłączenia robota
lub odcięcia zasilania itp. W trzecim przypadku najlepszym środkiem jest uniemożliwienie
pojawienia się człowieka w strefie pracy robota. Należy mieć świadomość, że zagrożenie
ze strony robota wynika nie tylko z fizycznego kontaktu z częściami ruchomymi robota,
ale rόwnież trzeba mieć na względzie przedmioty, ktόre mogą wypaść z chwytaka. Dążenie do
zagwarantowania bezpiecznej pracy stanowisk zrobotyzowanych realizowane powinno być na
drodze sprzętowej oraz programowej. W programach sterowania powinny być zawarte
algorytmy zabezpieczające przed kolizją oraz gwarantujące pewny chwyt chwytaka. Dodatkowo
stanowisko powinno być zabezpieczone barierami mechanicznymi oraz systemami
sensorycznymi.
Systemy ochronne na stanowiskach zrobotyzowanych, w zależności od zasięgu,
ich oddziaływania, można podzielić na trzy poziomy:
−
poziom 1 – ochrona operatorόw i osόb postronnych wkraczających w obszar stanowiska
podczas automatycznej pracy robota,
−
poziom 2 – wykrywanie obecności człowieka w obszarze stanowiska zrobotyzowanego 2a –
poza zasięgiem ruchόw robota, 2b – wewnątrz strefy ruchόw robota; ochrona operatorόw
i osόb wspόłpracujących z robotem podczas pracy automatycznej w przypadku awarii lub
odłączenia poziomu 1 lub niecelowości jego stosowania,
−
poziom 3 – wykrywanie obecności człowieka podczas bezpośredniego kontaktu z robotem
lub w niewielkiej odległości od ramienia robota – ochrona operatorόw lub konserwatorόw
podczas programowania, testowania i konserwacji robotόw.
Systemy ochronne poziomu pierwszego są powszechnie stosowane, natomiast systemy
poziomu 2 i 3 są w fazie opracowywania i wdrażania.
Zabezpieczenia sprzętowe poziomu 1 polegają na:
1) ograniczeniu prędkości ruchu robotόw podczas ich uczenia max do 0,3 [m/sek],
2) oznaczeniu zasięgu strefy pracy robotόw na podłożu żόłtymi liniami,
3) stosowanie ogrodzeń stanowisk (można zabezpieczyć człowieka przed wkroczeniem
w strefę pracy robota oraz ochronić przed urazem ze strony przedmiotόw upuszczonych
przez chwytak w czasie procesu manipulacji),
4) stosowanie systemόw sensorycznych, najlepiej razem z osłoną stałą,
5) podzielenie nadzorowanej powierzchni na strefy i ostrzeganie o ich przekroczeniu.
Układy sensoryczne umożliwiające wykrywanie obecności człowieka w strefie pracy robota.
1. Maty podłogowe – są budowane z dwóch płyt umieszczonych jedna na drugiej, które
pod wpływem obciążenia stykają się i zamykają obwód elektryczny.
2. Kurtyny świetlne – działają na zasadzie odbioru światła wysyłanego przez nadajnik,
np. przez diody. Strefa czułości ma kształt prostopadłościanu. Instalowane są również
dźwiękowe i świetlne sygnały ostrzegające osoby zbliżające się do układu zrobotyzowanego
lub obecne w strefie zagrożenia.
3. Skanery laserowe – należą do najnowszej generacji bezdotykowych urządzeń ochronnych.
Promień lasera „omiata” kontrolowaną strefę. Mierzony jest poziom promienia odbitego.
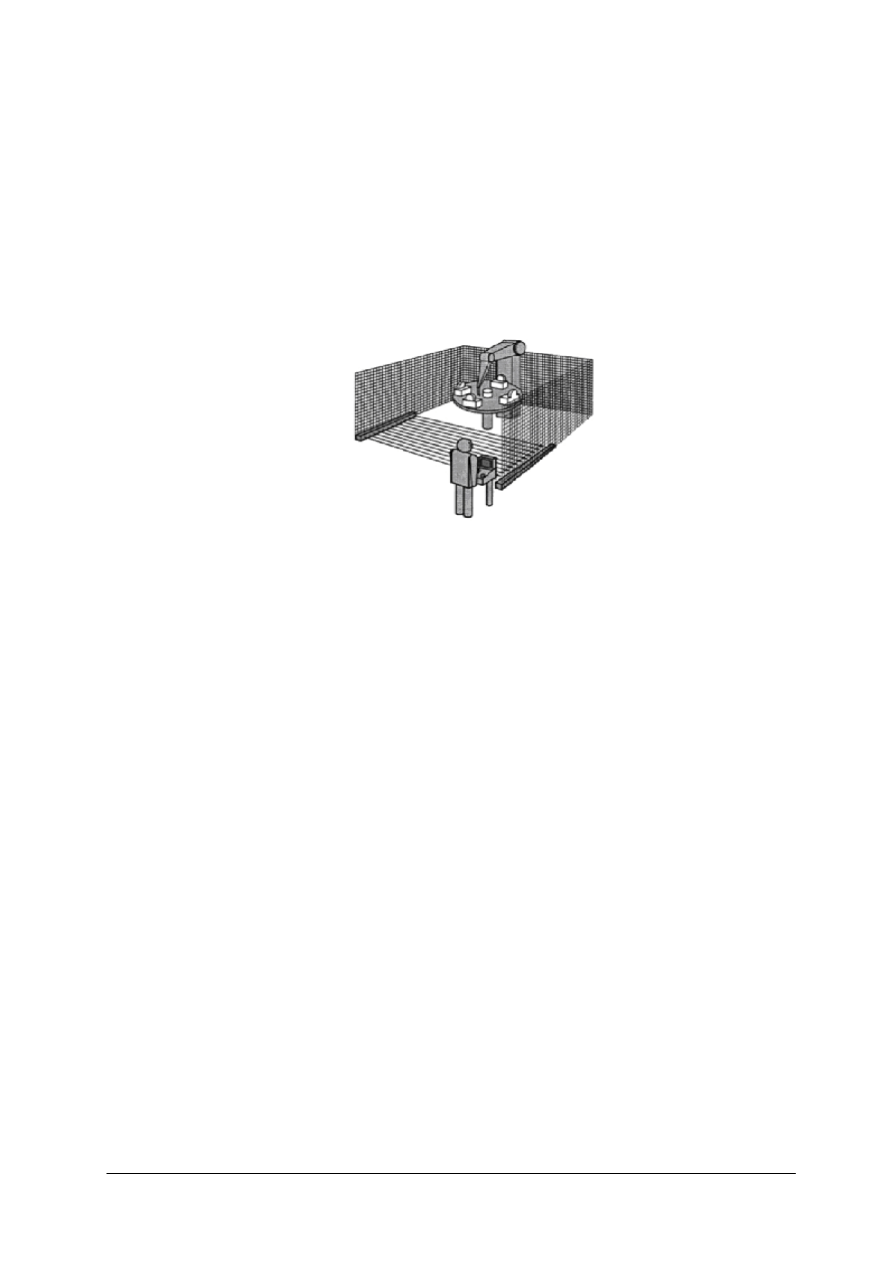
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
54
Skanery laserowe umożliwiają nie tylko wykrycie naruszenia strefy, ale i określenie miejsca
jej naruszenia.
4. Czujniki ultradźwiękowe – nadajniki i odbiorniki ultradźwiękόw umieszczone są na
ramieniu robota. Miarą odległości od przeszkody jest czas, jaki upłynie pomiędzy impulsem
wysłanym, a odbitym od przeszkody.
5. Analizatory obrazόw telewizyjnych – obraz wytwarzany przez kamerę telewizyjną
umieszczoną nad stanowiskiem jest poddawany analizie – rozpoznawane są kontury robota,
ludzi i innych elementόw stanowiska. W przypadku pojawienia się człowieka na stanowisku
system ustala jego położenie względem robota i przewiduje, czy może wystąpić kolizja.
Przykład zastosowania kurtyny świetlnej do ochron stanowisk zrobotyzowanych podano
na rys. 72.
Rys. 72. Przykłady zastosowania kurtyny świetlnej do ochrony stanowiska zrobotyzowanego [27]
4.3.2.
Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Na czym polegają czynności manipulacyjne wykonywane na obiektach podczas realizacji
procesόw produkcyjnych?
2. Jakie są cechy odrόżniające roboty przemysłowe od innych maszyn manipulacyjnych?
3. Jakie są zadania poszczegόlnych układόw funkcjonalnych robota?
4. Jakie są rodzaje energii zasilania robota?
5. Jakie są podobnieństwa w budowie człowieka i wspόłczesnych robotόw?
6. Jakie parametry umożliwiają scharakteryzowanie układόw kinematycznych robotόw?
7. Czym napędy maszyn manipulacyjnych i robotόw odrόżniają się od napędόw innych
maszyn technologicznych?
8. Jaki jest cel stosowania przekładni ruchu w zespołach ruchu robotόw?
9. Jakie są warunki poprawnego chwycenia obiektu przez chwytak robota?
10. Jaki jest cel stosowania układόw sensorycznych w robotach?
4.3.3. Ćwiczenia
Ćwiczenie 1
Sformułuj argumenty uzasadniające tezę: „Stosowanie układόw manipulacyjnych i robotόw
w realizacji procesόw produkcyjnych daje wiele korzyści”.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z informacjami zawartymi w rozdziale 4.3. Poradnika dla ucznia,
2) zapoznać się z fragmentami literatury wskazanymi przez nauczyciela,
3) zapisać argumenty w sprawozdaniu z wykonania ćwiczenia,
4) zaprezentować kolegom wyniki pracy.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
55
Wyposażenie stanowiska pracy:
−
literatura podana w rozdziale 6 Poradnika dla ucznia,
−
arkusz papieru formatu A4,
−
przybory do pisania,
−
materiały do pracy metodą przewodniego tekstu.
Ćwiczenie 2
W oparciu o kartę katalogową robota (model robota lub robot rzeczywisty) scharakteryzuj
jego strukturę funkcjonalną:
–
zidentyfikuj i opisz układy funkcjonalne robota,
–
określ rodzaj energii zasilania,
– rozpoznaj ile ramion posiada jednostka kinematyczna robota.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z informacjami zawartymi w rozdziale 4.3. Poradnika dla ucznia,
2) zapoznać się z fragmentami literatury wskazanymi przez nauczyciela,
3) przeanalizować kartę katalogową robota (zapoznać się z konstrukcją modelu robota
lub robota rzeczywistego),
4) przedstawić wyniki pracy w formie prezentacji.
Wyposażenie stanowiska pracy:
−
literatura podana w rozdziale 6 Poradnika dla ucznia,
−
karta katalogowa robota (model robota lub robot rzeczywisty),
−
arkusz papieru formatu A4,
−
materiały do pracy metodą przewodniego tekstu.
Ćwiczenie 3
W oparciu o dokumentację techniczno–ruchową robota zakwalifikuj go do odpowiedniej
grupy, zgodnie z klasyfikacją zamieszczoną na rys. 28, s. 31 Poradnika dla ucznia.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z informacjami zawartymi w rozdziale 4.3. Poradnika dla ucznia,
2) zapoznać się z fragmentami literatury wskazanymi przez nauczyciela,
3) przeanalizować dokumentację techniczno–ruchową,
4) zapisać w sprawozdaniu z ćwiczenia właściwości robota wiążące się z poszczegόlnymi
kryteriami klasyfikacji robotów.
Wyposażenie stanowiska pracy:
−
literatura podana w rozdziale 6 Poradnika dla ucznia,
−
dokumentacja techniczno – ruchowa robota,
−
materiały do pracy metodą przewodniego tekstu.
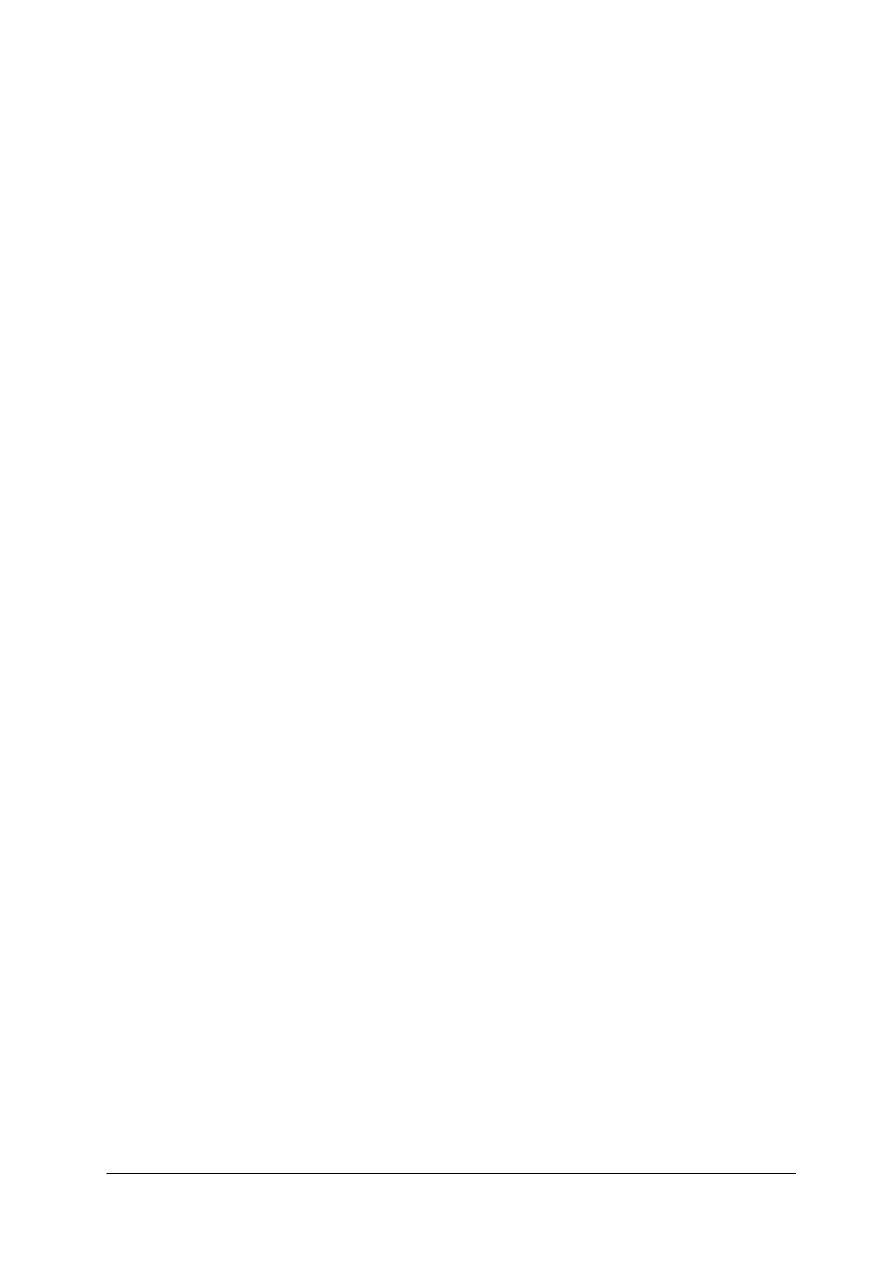
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
56
4.3.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) wskazać cele stosowania robotόw przemysłowych?
2) wyjaśnić strukturę funkcjonalną maszyn manipulacyjnych i robotόw?
3) rozrόżnić struktury jednostek kinematycznych robotόw?
4) wyjaśnić strukturę i przeznaczenie układόw ruchu robotόw?
5) opisać budowę i zadania urządzeń chwytających?
6) scharakteryzować metody programowania robotόw?
7) scharakteryzować strukturę układόw sensorycznych robotόw?
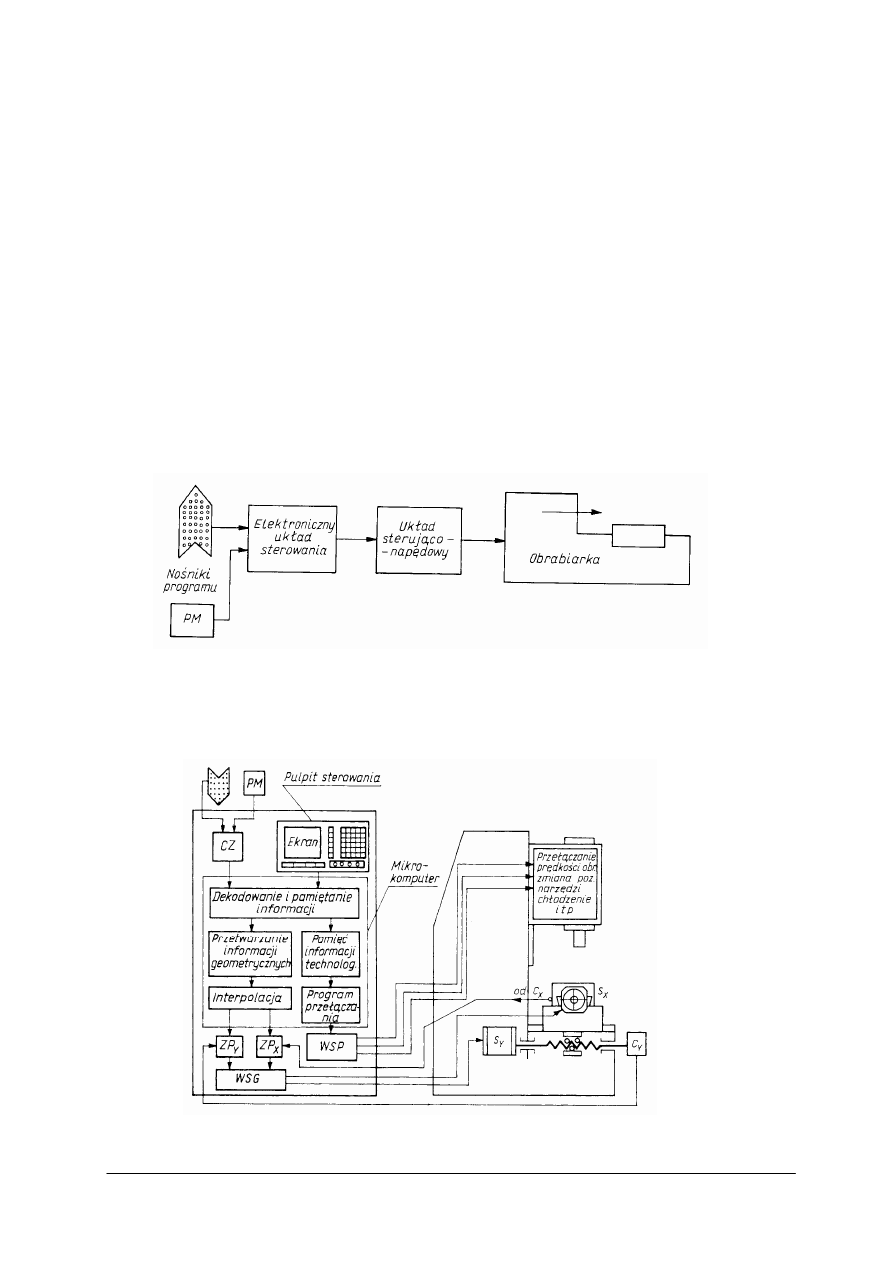
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
57
4.4. Obrabiarki sterowane numerycznie
4.4.1. Materiał nauczania
Sterowaniem numerycznym obrabiarek jest system sterowania, w którym wszystkie
informacje dotyczące kształtu obrabianego przedmiotu, warunków obróbki jak też czynności
pomocniczych podane są w postaci zakodowanych symboli cyfrowych i literowych. Informacje
te mogą być przygotowane w postaci zapisu na nośniku informacji lub wprowadzane
bezpośrednio przez operatora do pamięci układu sterowania obrabiarki za pomocą komputera.
Dzięki temu istnieje możliwość łatwego i szybkiego przystosowywania obrabiarki
do wykonywania różnych zadań obróbkowych.
W układzie sterowania obrabiarki (rys. 73) wyróżnia się:
−
elektroniczny układ sterowania,
−
układ (układy) sterująco–napędowe.
Zadaniem elektronicznego układu sterowania jest przetworzenie informacji wprowadzonych
za pomocą nośnika informacji lub przez operatora na sygnały sterujące przesyłane
do odpowiednich układów sterująco–napędowych.
Rys. 73. Schemat blokowy układu sterowania obrabiarki [11, s. 187]
Zadaniem układów sterująco–napędowych jest nadawanie tym zespołom położeń zgodnych
z sygnałami sterującymi wynikającymi z programu działania obrabiarki.Przepływ sygnałów i ich
przetwarzanie w obrabiarkach sterowanych numerycznie (CNC) przedstawiono na rys. 74.
Rys. 74. Schemat przepływu sygnałów i przetwarzania informacji w obrabiarce CNC [11, s. 188]
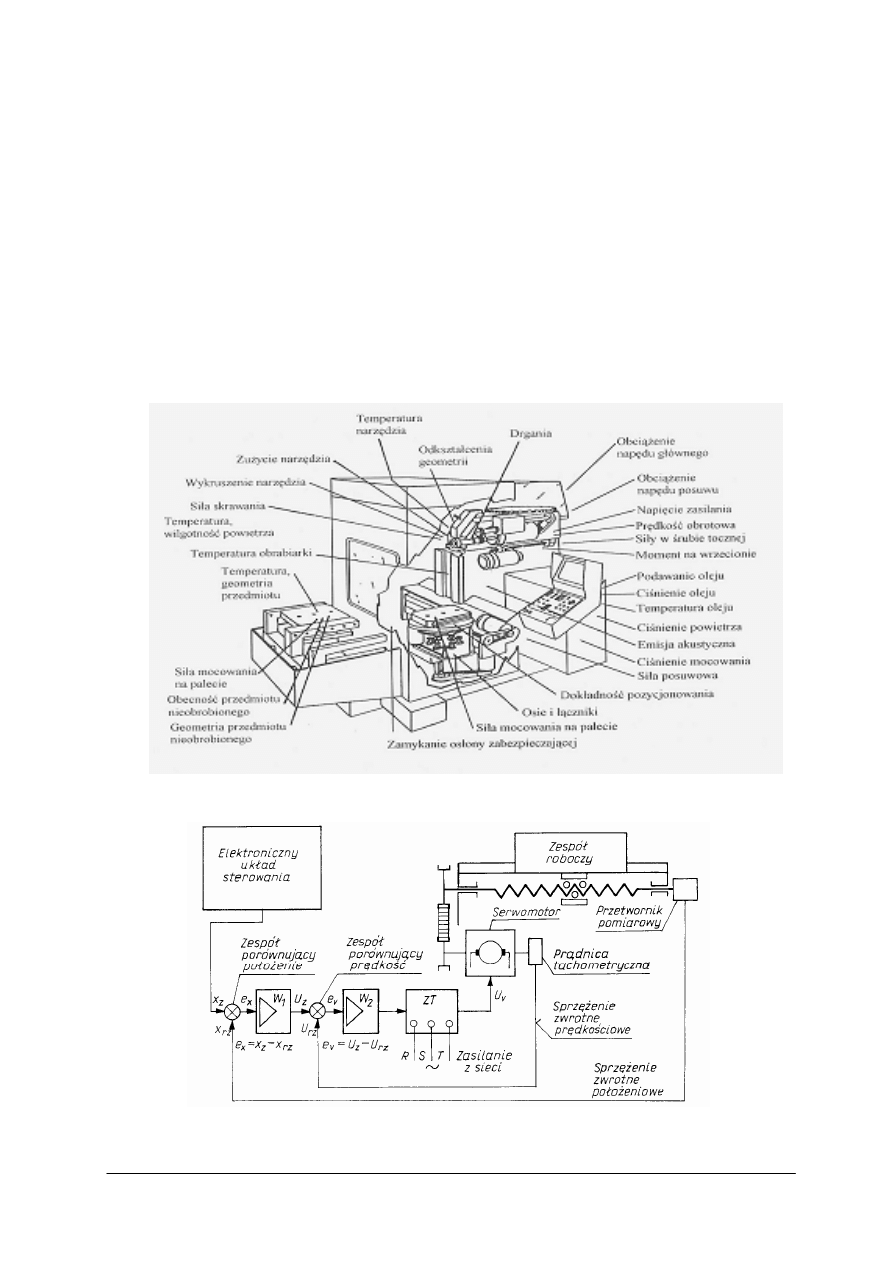
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
58
W nowoczesnych obrabiarkach sterowanych numerycznie dokonuje się kontroli wielu
parametrów związanych z narzędziem, przebiegiem procesu obróbki oraz stanu obrabiarki
i zebrane w ten sposób informacje wykorzystywane są do zagwarantowania optymalnego
przebiegu procesu (rys. 75). Automatyzacja zespołów konstrukcyjnych obrabiarek i całych
maszyn wymaga skutecznej kontroli i nadzorowania prawidłowości działania poszczególnych
elementów i podzespołów obrabiarki poprawy dokładności obróbki, uniknięcia awarii.
Współczesne układy sterowania CNC są bardzo niezawodne, szybkie i precyzyjne.
Zespoły napędowe obrabiarek CNC wykonywane są jako serwonapędy (rys. 76). Składają
się z następujących części:
−
serwomotoru (silnika prądu stałego lub przemiennego, silnika krokowego lub silnika
hydraulicznego),
−
przekładni (bezluzowa przekładnia zębata, przekładnia cięgnowa z pasem uzębionym,
przekładnia śrubowo – toczna),
−
układu pomiarowego położenia oraz prędkości obrotowej.
Rys. 75. Typowe wielkości wymagające śledzenia w obrabiarkach sterowanych numerycznie [26, s. 576]
Rys. 76
.
Struktura serwonapędu obrabiarki CNC [11, s. 189]
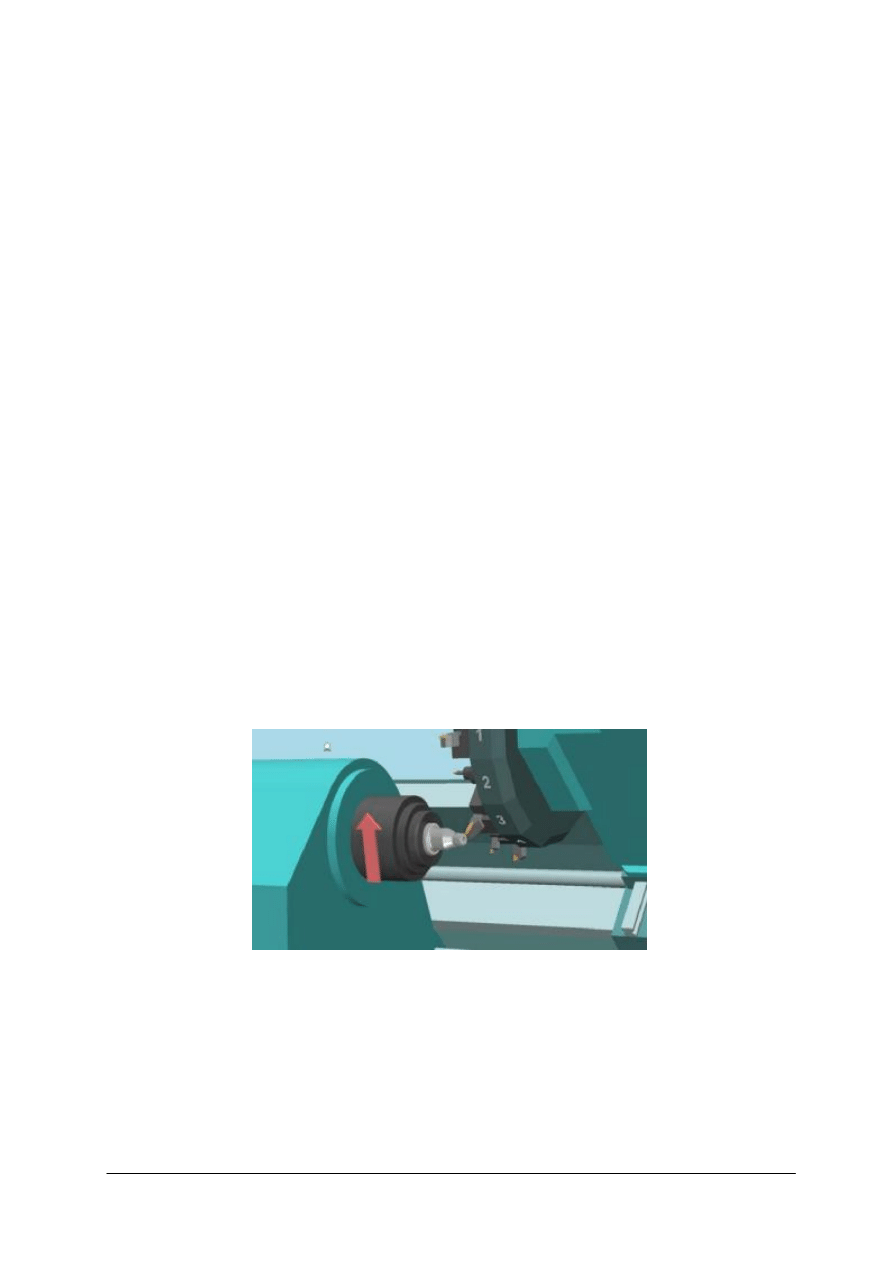
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
59
Wraz z rozwojem układów sterowania numerycznego istnieje konieczność dostarczania
coraz większej liczby informacji o prawidłowości działania obrabiarki i poprawności
realizowanego procesu. Uzyskuje się to dzięki diagnostyce i nadzorowaniu pojedynczych
obrabiarek i całych systemów obróbkowych. Diagnostyka obrabiarek CNC obejmuje układy
sterowania mechanizmami maszyn, urządzenia pomocnicze, oprogramowania i wreszcie
narzędzia i proces obróbki. Kontroli podlegają następujące grupy parametrów:
−
określające gotowość obrabiarki do pracy, takie jak: wyłącznik sygnalizujący zamknięcie
osłony zabezpieczającej, sensor sygnalizujący obecność przedmiotu obrabianego lub sensor
sygnalizujący zadziałanie urządzeń mocujących,
−
nadzorujące stan maszyny: dokładność pozycjonowania, temperaturę czy odkształcenia
geometrii, geometrię i położenie przedmiotu obrabianego, drgania,
−
nadzorujące prawidłowość procesu: siły skrawania, siły posuwowe, moment na wrzecionie,
−
nadzorujące stan narzędzi (zużycie i wykruszenie),
−
łożyska wrzecion, łożyska wałków, przekładnie zębate i pasowe, napędy posuwów i obrotów
oraz wielkości kinematyczne, geometryczne i inne mechanizmy.
Przyczyną wielu nieprawidłowości w procesie obróbki mogą być błędy w programach
technologicznych. Błędy programowania powinny być wykryte i usunięte przed rozpoczęciem
obróbki. Dobre efekty diagnostyczne zapewnia symulacja ruchów zespołów oparta
o zamodelowanie uchwytów, przedmiotu, narzędzi i wzajemnych ruchów, wynikających
z programu technologicznego. Można więc w ten sposób nie tylko diagnozować błędy
programów, ale również kolizje.
Kolizjom związanym z nieprawidłowościami narzędzi i przedmiotów można zapobiegać
przez automatyczną symulację w układzie sterowania CNC torów narzędzi w przestrzeni
roboczej obrabiarki, z uwzględnieniem ich aktualnych wymiarów i wymiarów przedmiotów.
Układ do diagnozowania kolizji korzysta oprócz programu CAD i danych technologicznych,
z odpowiednich sygnałów pomiarowych: pomiarów przedmiotu dokonywanych każdorazowo
po jego zamocowaniu i pomiarów narzędzia wprowadzonego do obróbki. Możliwość
wystąpienia kolizji jest sygnalizowana na ekranie monitora, układ zaś nadzorowania zapobiega
jej wystąpieniu (rys.77).
Rys. 77. Obraz symulacji procesu toczenia [21]
Diagnozowanie gotowości systemu do rozpoczęcia pracy stanowi podstawę uruchomienia
cyklu pracy i obejmuje sprawdzenia:
−
czy poszczególne zespoły zajmują prawidłowe położenia;
−
czy spełnione są warunki zadziałania poszczególnych składników;
−
czy prawidłowo zadziałały podstawowe mechanizmy, np. mocowania przedmiotu
i narzędzia, blokowania i odblokowania poszczególnych mechanizmów i inne;
−
czy jest narzędzie i przedmiot.
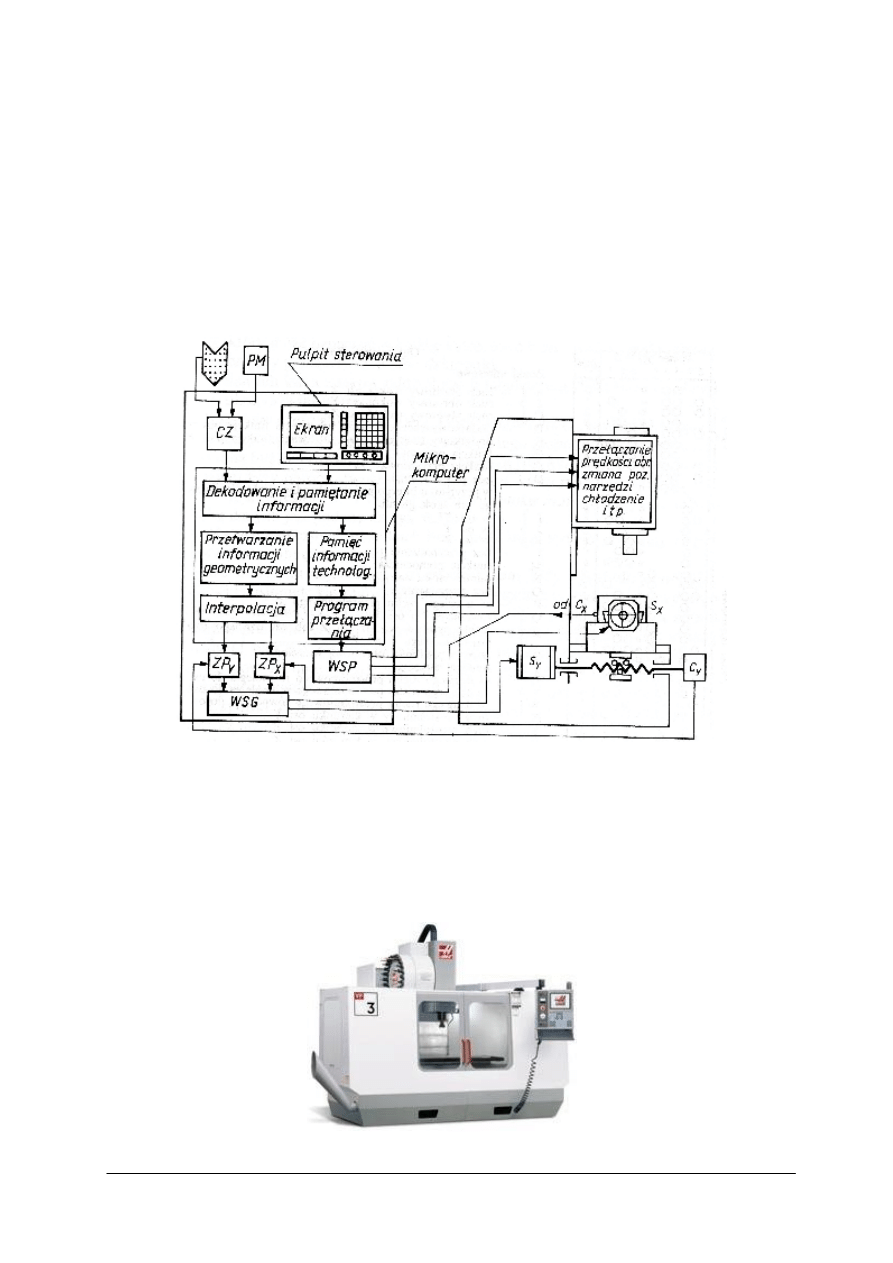
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
60
Układy CNC podejmują zaprogramowane działania, gdy spełnione są określone warunki.
Niespełnienie któregoś z nich jest sygnalizowane przez układ sterowania co najmniej
na monitorze, co stanowi podstawę postępowania operatora zmierzającego do usunięcia
niesprawności. Przy bardzo dobrze zorganizowanej diagnostyce na monitorze pojawi się
dokładny opis niesprawności, jej lokalizacja i objaśnienie sposobu usuwania. Wyświetlona
informacja może też mieć postać syntetyczną, wymagającą interpretacji operatora.
Schemat przepływu i przetwarzania informacji w układzie sterowania obrabiarki CNC
przedstawiono na rys. 78, gdzie: ZP
x
– zespół porównujący osi x, ZP
y
– zespół porównujący
osi y, WSG – wzmacniacz sygnału napędu głównego, WSP – wzmacniacz sygnału napędu
pomocniczego, s – silniki napędów, c – czujniki.
Rys. 78. Schemat przepływu i przetwarzania informacji w układzie sterowania obrabiarki CNC [11, s. 179]
Sterowanie pracą obrabiarki obejmuje następujące czynności:
−
przemieszczenie suportu wzdłużnego i poprzecznego,
−
ustawienie prędkości posuwów roboczych i ruchów ustawczych,
−
ustawienie prędkości obrotowej wrzeciona,
−
wybór narzędzi (wybór położenia głowicy rewolwerowej),
−
zatrzymanie obrabiarki po zakończeniu procesu obróbki.
Rys. 79. Widok frezarki CNC [19]

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
61
Rys. 80. Widok tokarki CNC [19]
Na rys. 79 i 80 przedstawiono widoki frezarki i tokarki CNC.
Struktura programu sterowania
Program sterowania składa się z pewnej liczby bloków danych oraz informacji
pomocniczych, takich jak nazwa programu, komentarz. Bloki danych są zbiorem rozkazów
skierowanych do komputera, nakazujących wykonanie przez obrabiarkę sekwencji ściśle
określonych przesunięć względnych narzędzia i obrabianego przedmiotu, a także wielu innych
ruchów oraz czynności pomocniczych maszyny wymaganych przez technologa lub operatora
obrabiarki.
Wszystkie znaki tekstu programu powinny być zapisane w kodzie ISO (PN – 7/M 55250).
W systemie PRONUM 630 T występują następujące funkcje standardowe:
−
funkcja przygotowawcza G,
−
funkcja prędkości posuwu F,
−
funkcja prędkości obrotowej S,
−
funkcja narzędzia T,
−
funkcja pomocnicza M,
−
funkcja adresu pamięci D.
Funkcje przygotowawcze określają wszystkie istotne cechy programowanego ruchu zespołu
roboczego obrabiarki. Za ich pośrednictwem można wybrać:
−
pożądany kształt toru,
−
sposób wykonania ruchu po torze,
−
metodę wymiarowania przesunięć,
−
rodzaj korekcji toru.
Cykle stałe obróbki określają sekwencje ruchów szybkich i roboczych oraz
skoordynowanych z nimi czynności maszyny niezbędnych do przeprowadzenia złożonych
operacji technologicznych, takich jak:
−
toczenie zgrubne i wykańczające,
−
gwintowanie,
−
wiercenia.
W ramach programowania funkcji pomocniczych stosowane są następujące funkcje:
−
funkcja prędkości obrotowej,
−
funkcja identyfikacji i wyboru narzędzia.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
62
4.4.2. Pytania sprawdzające
Opowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Na czym polega sterowanie numeryczne obrabiarek?
2. Jaka jest struktura układu sterowania numerycznego obrabiarek?
3. Czym charakteryzują się zespoły napędowe obrabiarek sterowanych numerycznie?
4. Jaki jest cel kontroli określonych grup parametrów obrabiarki sterowanej numerycznie oraz
realizowanego procesu?
5. Dlaczego przed uruchomieniem programu sterowniczego obrabiarki CNC należy
przeprowadzić jego symulację?
6. Jaka jest struktura programu sterowniczego obrabiarki CNC?
4.4.3. Ćwiczenia
Ćwiczenie 1
Sformułuj argumenty uzasadniające tezę: „Stosowanie obrabiarek sterowanych numerycznie
w realizacji procesów produkcyjnych daje wiele korzyści”.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z informacjami zawartymi w rozdziale 4.4. Poradnika dla ucznia,
2) zapoznać się z fragmentami literatury wskazanymi przez nauczyciela,
3) zapisać argumenty w sprawozdaniu z wykonania ćwiczenia,
4) zaprezentować wyniki pracy.
Wyposażenie stanowiska pracy:
−
literatura podana w rozdziale 6 Poradnika dla ucznia,
−
arkusz papieru formatu A4,
−
materiały do pracy metodą tekstu przewodniego.
Ćwiczenie 2
W oparciu o dokumentację techniczno–ruchową obrabiarki sterowanej numerycznie
scharakteryzuj jej strukturę funkcjonalną:
−
zidentyfikuj i opisz układy funkcjonalne obrabiarki,
−
określ rodzaj energii zasilania.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z informacjami zawartymi w rozdziale 4.4. Poradnika dla ucznia,
2) zapoznać się z fragmentami literatury wskazanymi przez nauczyciela,
3) przeanalizować dokumentację techniczno – ruchową obrabiarki sterowanej numerycznie,
4) zapisać w sprawozdaniu z ćwiczenia odpowiedzi na polecenia zawarte w treści ćwiczenia.
Wyposażenie stanowiska pracy:
−
literatura podana w rozdziale 6 Poradnika dla ucznia,
−
dokumentacja techniczno–ruchowa obrabiarki sterowanej numerycznie,
−
arkusz papieru formatu A4,
−
materiały do pracy metodą przewodniego tekstu.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
63
4.4.4.
Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) wyjaśnić na czym polega sterowanie numeryczne obrabiarek?
2) scharakteryzować strukturę układu sterowania obrabiarki CNC?
3) wyjaśnić budowę układu napędowego obrabiarki CNC?
4) scharakteryzować zakres diagnozowania systemów obrabiarki CNC
oraz realizowanego procesu?
5) wyjaśnić cel przeprowadzania symulacji programu sterowniczego
obrabiarki CNC ?
6) scharakteryzować strukturę programu sterowniczego obrabiarki?
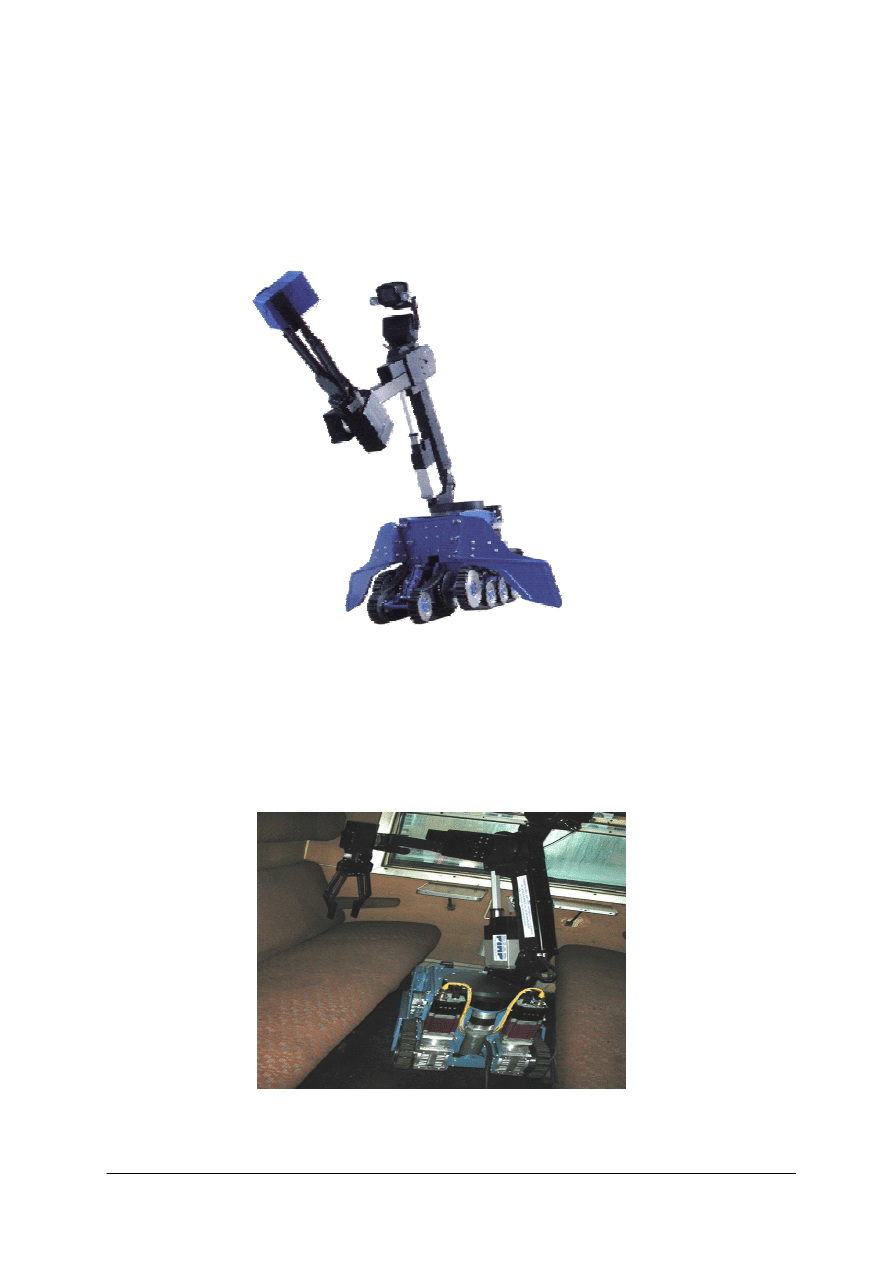
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
64
4.5. Specjalistyczne urządzenia mechatroniczne
4.5.1. Materiał nauczania
Robot neutralizująco-wspomagający EXPERT
Expert jest nowoczesnym kompaktowym robotem neutralizująco–wspomagającym
przeznaczonym do rozpoznawania i neutralizacji ładunków niebezpiecznych.
Rys. 81. Widok robota EXPERT [22]
Zestaw robota składa się z: gąsienicowej platformy mobilnej, zamontowanego na niej
manipulatora z chwytakiem oraz stanowiska operatora (rys. 81). Expert może pracować
w ciasnych pomieszczeniach (samoloty, autobusy, pociągi).(rys. 82. rys. 83)
.
Urządzenie
jest napędzane silnikami zasilanymi z akumulatorów umieszczonych wewnątrz platformy
mobilnej lub przez kabel z sieci 220V. Czas pracy przy zasilaniu z akumulatorów wynosi
od dwóch do pięciu godzin (zależnie od rodzaju wykonywanych czynności).
Rys. 82. Wykorzystanie robota EXPERT w wagonie kolejowym [22]
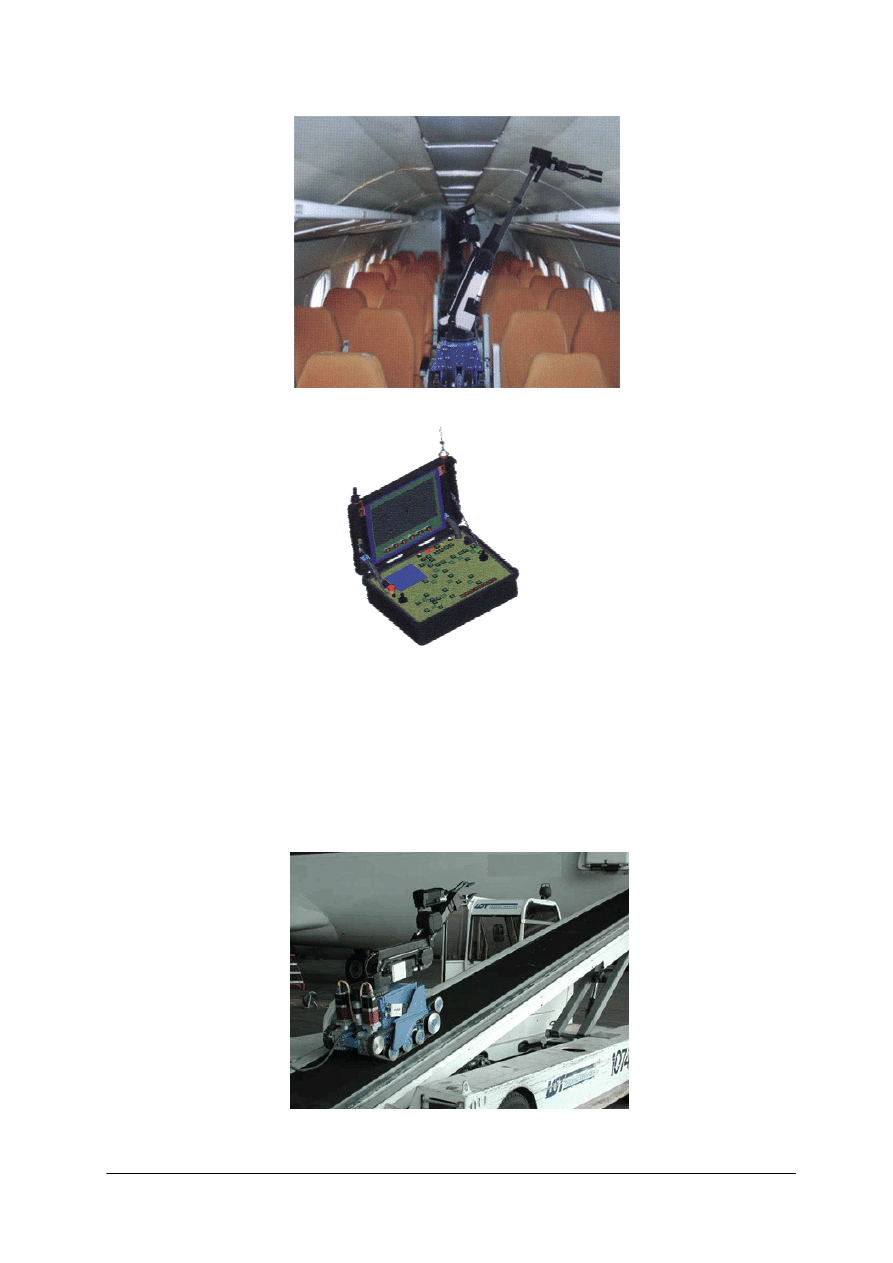
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
65
Rys. 83. Wykorzystanie robota EXPERT w samolocie [22]
Rys. 84. Panel operatora [22]
Robot jest zdalnie sterowany ze stanowiska drogą radiową lub przez kabel (rys.84).
Platforma mobilna umożliwia pokonywanie krawężników i niewielkich nierówności terenu.
(rys. 85). Specjalnie zaprojektowana konstrukcja zapewnia stabilność robota przy pracy
i przy pokonywaniu przeszkód. Platforma mobilna ma elastyczne zawieszenie dopasowujące
kształt gąsienicy do podłoża i zapewniające równomierny rozkład nacisków. Rozkładane
stabilizatory boczne pozwalają na bezpieczną pracę urządzenia nawet przy maksymalnym
wysięgu i obciążeniu manipulatora.
Rys. 85. Wjazd robota EXPERT po pochyłości [22]
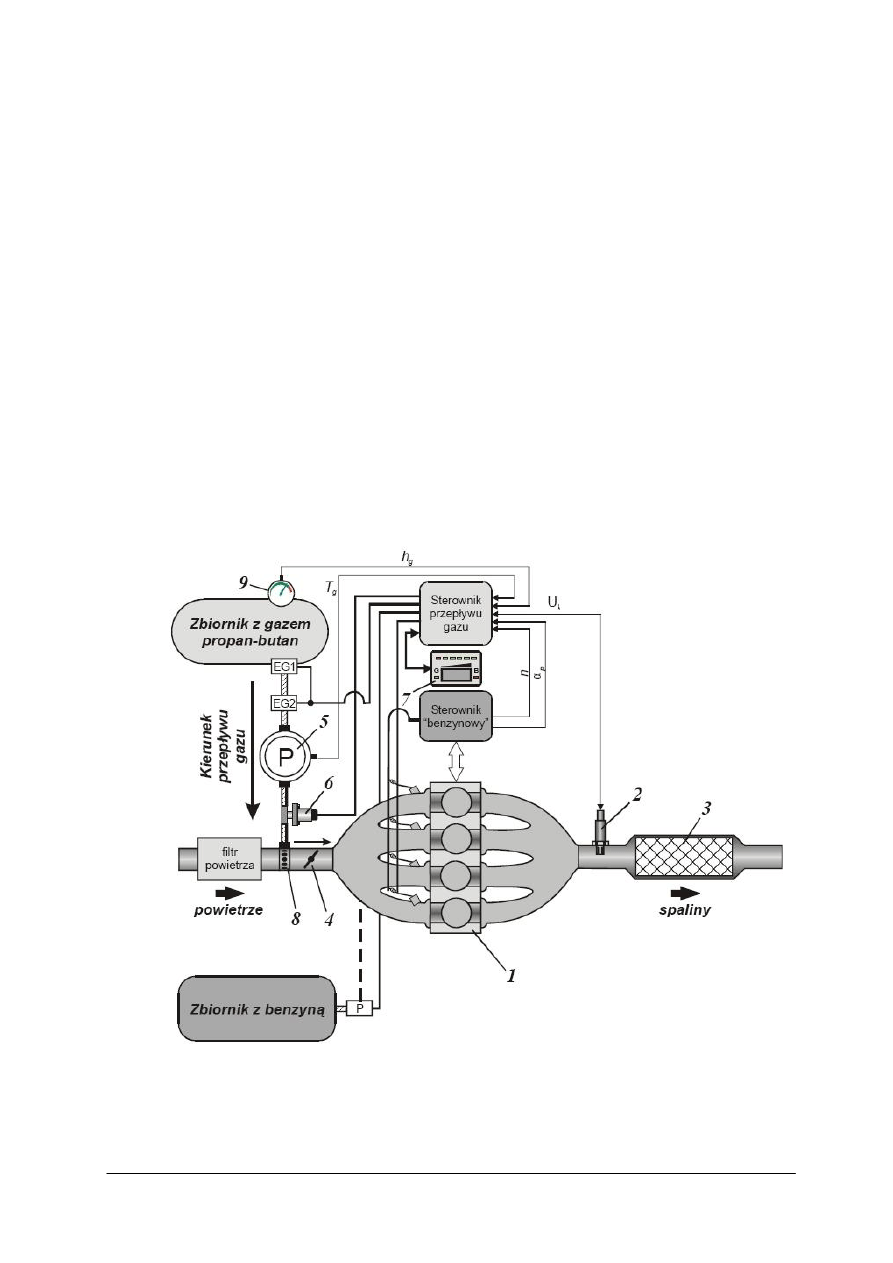
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
66
Manipulator o sześciu stopniach swobody, zaopatrzony w chwytak, jest osadzony w tylnej
części platformy mobilnej. Składa się z obrotowej kolumny oraz dwóch niezależnych ramion
(dolne i górne wysuwane) oraz niezależnej osi nadgarstka zaopatrzonej w elektryczne gniazdo
uniwersalne. W osi nadgarstka znajduje się uniwersalny interfejs mechaniczny służący
do szybkiej i łatwej wymiany elementów wyposażenia. System napędowy manipulatora został
zabezpieczony sprzęgłami przeciążeniowymi, które minimalizują skutek odrzutu podczas
wystrzału bądź wybuchu ładunku umieszczonego w chwytaku lub w jego pobliżu. Na ekranie
monitora jest prezentowana graficzna interpretacja aktualnej konfiguracji ramion manipulatora.
Robot został wyposażony w funkcje, które przeciwdziałają samozniszczeniu elementów
manipulatora w wyniku błędnego sterowania przez operatora.
Siła zacisku szczęk chwytaka
jest przedstawiana graficznie na stanowisku operatorskim.
System sterowania przepływem gazu LPG
System przeznaczony jest do sterowania składem mieszanki paliwowo–powietrznej
zasilającej silnik samochodowy o zapłonie iskrowym, w pojazdach przystosowanych
do zasilania gazem propan – butan. Centralka zainstalowana w przedziale pasażerskim
samochodu umożliwia przełączanie rodzaju zasilania silnika z benzyny na gaz i odwrotnie
(rys. 86). Pełni ona również funkcję informacyjną, umożliwiając ocenę ilości gazu w zbiorniku
oraz aktualnego rodzaju paliwa, którym zasilany jest silnik. System steruje składem mieszanki
gazowej zasilającej silnik w sposób automatyczny. Kierowca pojazdu może jedynie zmienić
rodzaj zasilania: z benzynowego na gazowe i odwrotnie.
Rys. 86. Schemat połączeń systemu sterowania przepływem gazu LPG: 1 – silnik benzynowy, 2 – czujnik tlenu
w spalinach (sonda lambda), 3 – katalizator, 4 – przepustnica, 5 – reduktor – parownik, 6 – zawór gazowy,
7 – centralka, 8 – mieszalnik, 9 – czujnik poziomu gazu [7]
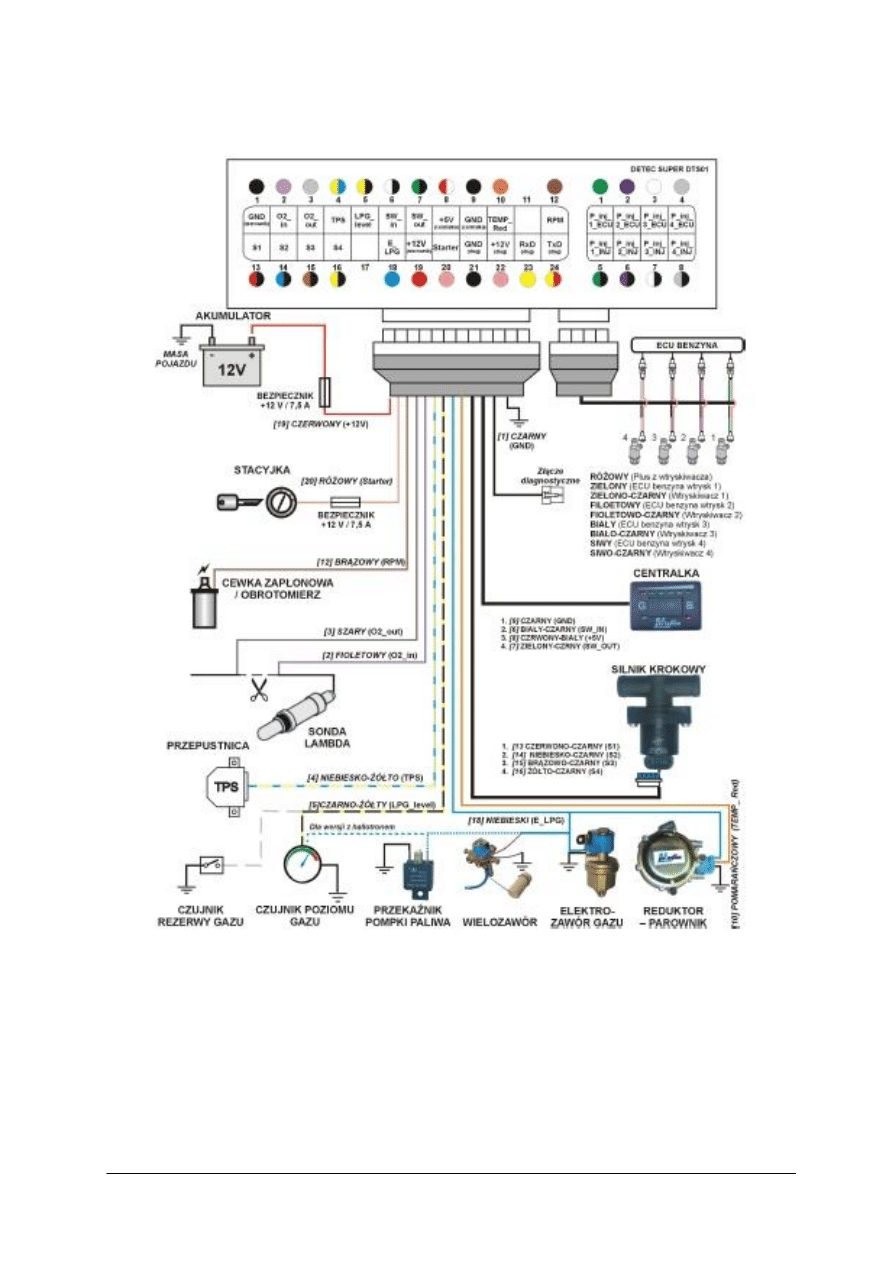
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
67
Schemat elektryczny systemu sterowania przepływem gazu przedstawiono na rys. 87.
Rys. 87. Schemat elektryczny systemu sterowania przepływem gazu [7]
Inteligentny dom
System zarządzania budynkiem znajduje zastosowanie w budynkach biurowych,
przemysłowych i instytucji. Istotą działania tego systemu jest integracja, kontrola,
monitorowanie, optymalizacja i raportowanie takich elementów jak:
1. Sterowanie ogrzewaniem – np. reakcja systemu na temperaturę w danym pomieszczeniu,
polegająca na ogrzaniu lub schłodzeniu powietrza tylko i wyłącznie w tym pomieszczeniu.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
68
2. Symulacja obecności – polegająca na zapalaniu/gaszeniu światła w wybranych
pomieszczeniach oraz, np. na odtwarzaniu muzyki, uruchomieniu telewizora, uchylaniu
okien, podnoszeniu lub opuszczaniu rolet.
3. System alarmowy i monitoringu – reakcja systemu na próby włamania, jak np. stłuczenie
szyby w oknie, przekroczenie wyznaczonej linii. Przykładem takiej reakcji może być
automatyczne poinformowanie policji o zaistniałych okolicznościach, uruchomienie syren
alarmowych. System może rejestrować wydarzenia zachodzące na terenie budynku, co może
się przydać np. policji.
4. System przeciwpożarowy – sieć czujników dymu i temperatury oraz spryskiwacze.
Zadaniem tego podsystemu jest ochrona budynku i jego użytkowników na wypadek pożaru.
5. System personalizacji.
Integracja wszystkich instalacji sprawia, że zdarzenia zachodzące w jednej z nich, mogą
być
wykorzystywane do sterowania innymi instalacjami (co zapobiega dublowaniu tych urządzeń
i w znacznym stopniu wpływa na obniżenie kosztów wszystkich instalacji).
Budynki wyposażone w tego typu systemy, zyskały miano „inteligentnych”.
Do podstawowych funkcji systemu, zalicza się
sterowanie:
−
obwodami oświetleniowymi, w tym sterowanie złożonymi scenami świetlnymi,
−
roletami i karniszami elektrycznymi,
−
bramami wjazdowymi i garażowymi,
−
ogrzewaniem,
−
zraszaniem trawników,
−
elementami bezpieczeństwa budynku, jak klapy dymowe, elektrozawory wody i gazu, itd.,
−
innymi obwodami elektrycznymi, jak np., gniazdkami, pompami, elektrozaczepami
i zworami elektromagnetycznymi, siłownikami, urządzeniami grzewczymi, itd.
Inteligentny dom, to wygoda i komfort użytkowania. Brak ograniczeń związanych
z fizycznym przypisaniem wyłączników do określonych obwodów, daje możliwość
zainstalowania takiej liczby wyłączników, aby "pod ręką" zawsze znajdował się ten najbardziej
potrzebny (dowolna liczba wyłączników w dowolnych miejscach – sterujących dowolnymi
obwodami). Przypisanie wielu funkcji jednemu wyłącznikowi, daje możliwość grupowania
najczęściej wykonywanych funkcji, np.: jeden wyłącznik w salonie zapala wybrane punkty
świetlne, wg ustawionego dla nich natężenia oświetlenia, zamyka rolety w tym pomieszczeniu,
wyłącza oświetlenie w innych pomieszczeniach. Wyłącznik przy drzwiach wyjściowych, gdy
wychodzą mieszkańcy – powoduje zamknięcie wszystkich rolet, wyłączenie całego oświetlenia,
wyłączenie obwodów elektrycznych (np. gniazdek których używamy do prasowania), zamyka
zawór gazu i zawór wody. Tego typu funkcje sprawiają, że w każdej chwili jest gwarancja,
iż wszystko co należy wyłączyć – rzeczywiście zostało wyłączone. Możliwość pełnej
automatyzacji zadań ma największy wpływ, nie tylko na wygodę użytkowników, ale i na
oszczędności, ponieważ system jest w stanie wykonać wszystkie czynności o wiele dokładniej
niż ludzie, niczego nie przeoczy i o niczym nie zapomni, a na dodatek wykona to wszystko
w sposób optymalny. Jednocześnie przejmie na siebie wiele codziennych, nieraz uciążliwych
czynności, których często nie wykonuje się z prostych przyczyn: zapomnienia, braku czasu,
nieobecności, czy też zwykłego, nie przykładania do nich odpowiedniej wagi, np.: automatyczne
załączanie światła (gdy jest ciemno), w pomieszczeniach i miejscach do których wchodzimy
i wyłączanie ich po naszym wyjściu. Podstawowym celem systemu, jest wyeliminowanie
sterowników poszczególnych urządzeń
i ich zastąpienie, a tym samym integracja wszystkich
elementów instalacji domowych.
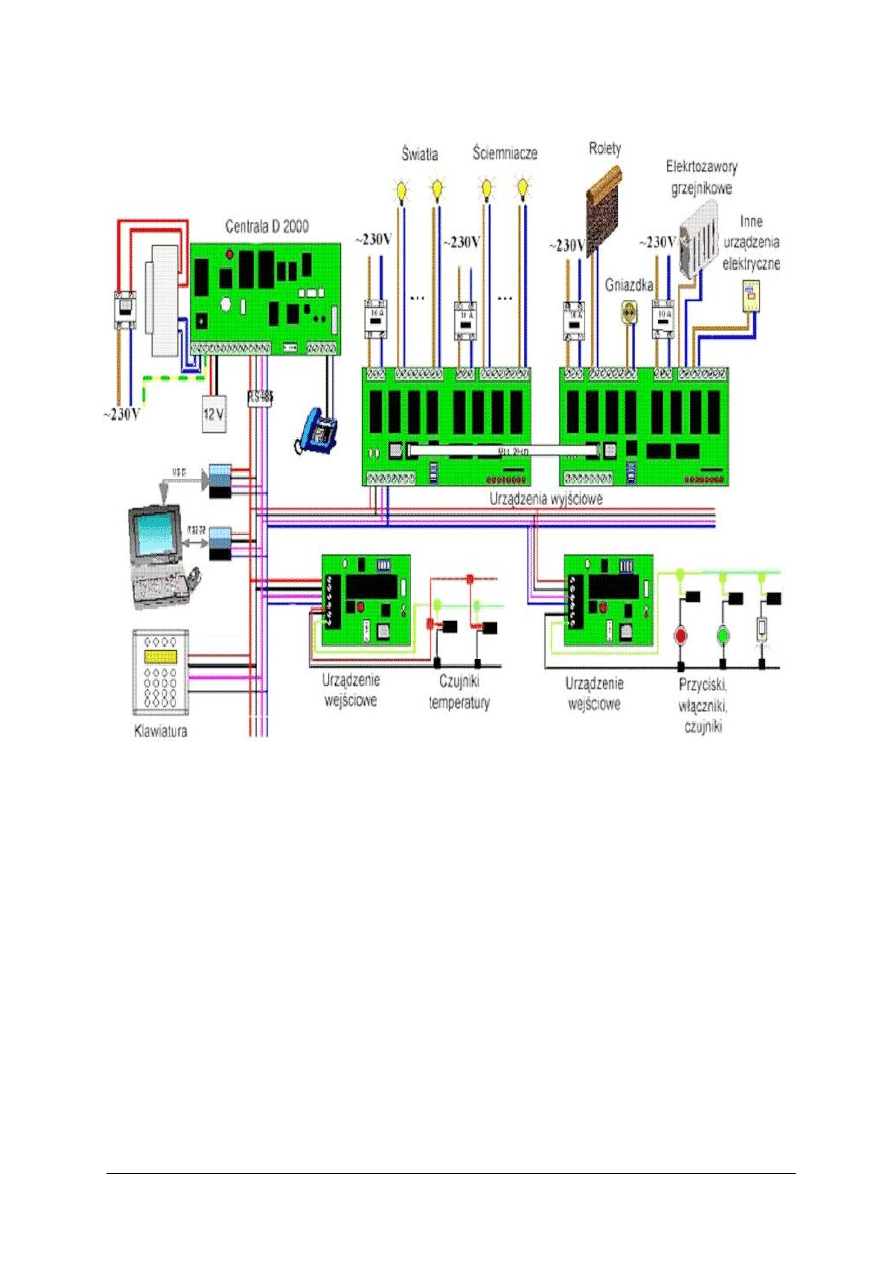
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
69
Schemat ideowy systemu inteligentnego domu przedstawiono na rys.88.
Rys. 88. Schemat ideowy systemu inteligentnego domu [6]
Łożysko toczne z sensorem
Łożysko toczne jest organem, w którym powstają względne ruchy innych elementów
lub przez które przechodzą siły obciążające. Jako organ precyzyjny jest idealnym miejscem
do zdobycia informacji, takich jak liczba obrotów, kierunek obrotów, pozycja absolutna,
obciążenie itd. Łożysko toczne z sensorem jest kombinacją mechaniki i sensoryki. Koncepcja
takiego łożyska, polega na integracji dwóch funkcji w jednym nośniku: funkcji łożyska tocznego
i generowania sygnału elektrycznego (rys. 90). Łożysko sensorowe ma takie same wymiary jak
standardowe jednorzędowe łożysko kulkowe. Jego zastosowanie obniża koszty funkcji
pomiarowych i nadzorczych i przez to rozszerza możliwości stosowania łożysk.
Opracowanie łożyska sensorowego polegało na takiej integracji sensora i łożyska
standardowego, aby pozostała absolutna wymienialność łożysk. Uzyskano to przez sensor efektu
Halla. Sensor ten współpracuje z pierścieniem magnetycznym (namagnesowane są bieguny NS),
naciągniętym na wewnętrzny pierścień łożyska. Element Halla wbudowany jest w uszczelnienie
nieruchomego pierścienia zewnętrznego. W ten sposób wytwarzane jest przemienne napięcie,
którego częstotliwość zależy od liczby obrotów wewnętrznego pierścienia łożyska. W ten sposób
powstało łożysko, które dodatkowo spełnia funkcję inkrementalnego czujnika impulsów.
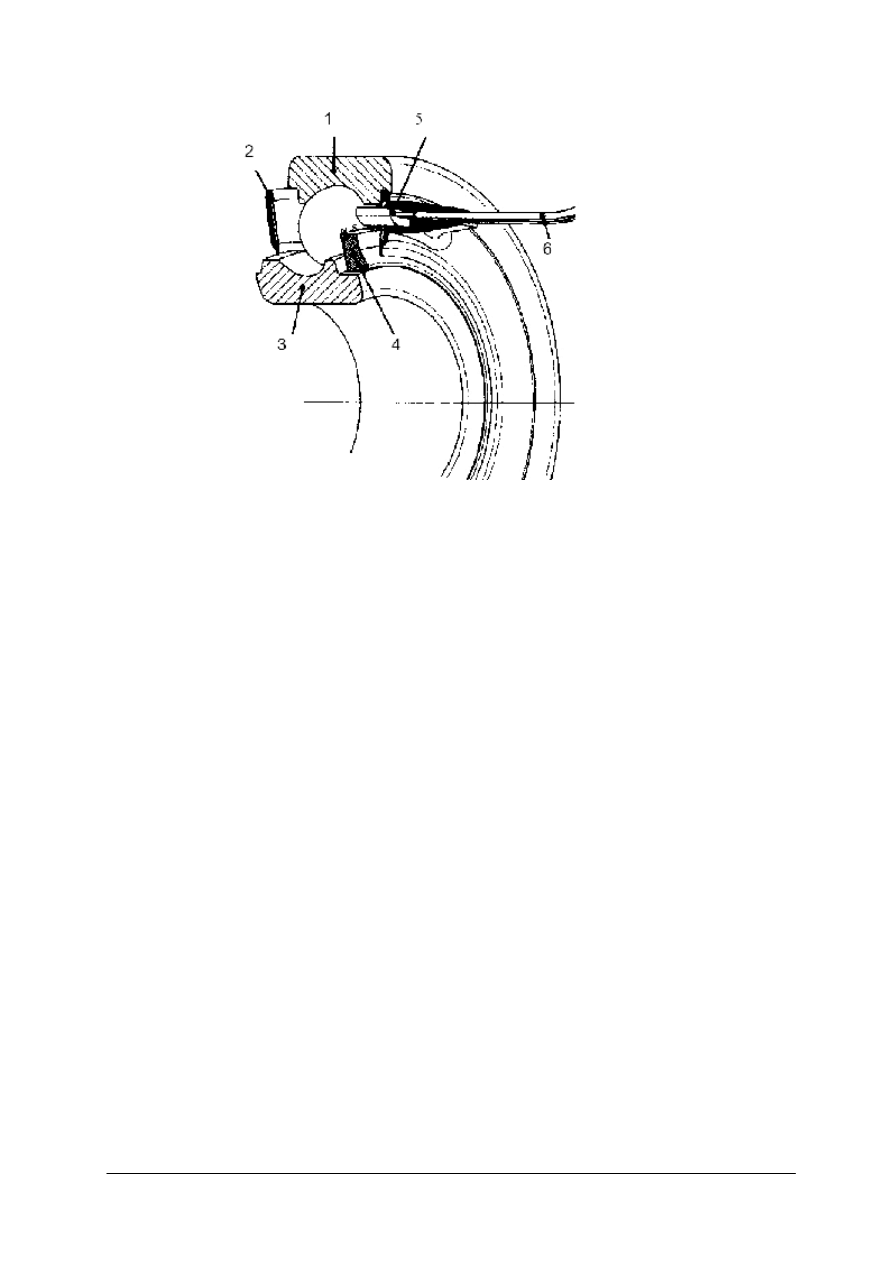
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
70
Rys. 89. Budowa łożyska – sensora: 1 – nieruchomy pierścień zewnętrzny, 2 – uszczelnienie, 3 – wewnętrzny
pierścień łożyska, 4 – wielobiegunowy pierścień magnetyczny, 5 – sensor efektu Halla,
6 – kabel przyłączeniowy.[3, s.48]
4.5.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jakie są korzyści wynikające ze stosowania robotów neutralizująco–wspomagających
EXPERT?
2. Które elementy systemu sterowania przepływem gazu zaliczyć można do grupy sensorów?
3. Jakie cechy systemu „inteligentny dom” uzasadniają twierdzenie, iż jest to system
mechatroniczny?
4. Jaką rolę w urządzeniach mechatronicznych spełnia łożysko z sensorem?
4.5.3. Ćwiczenia
Ćwiczenie 1
Uzasadnij, że system sterowania przepływem gazu LPG jest systemem mechatronicznym.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z informacjami zawartymi w rozdziale 4.5. Poradnika dla ucznia
2) zapoznać się z fragmentami literatury wskazanymi przez nauczyciela,
3) zapisać uzasadnienie w sprawozdaniu z ćwiczenia oraz przedstawić je w formie prezentacji.
Wyposażenie stanowiska pracy:
−
literatura podana w rozdziale 6 Poradnika dla ucznia,
−
arkusz papieru formatu A4,
−
dokumentacja techniczno–ruchowa systemu sterowania przepływem gazu LPG,
−
materiały do pracy metodą przewodniego tekstu.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
71
Ćwiczenie 2
W oparciu o dokumentację techniczną systemu „inteligentny dom” scharakteryzuj
jego strukturę funkcjonalną i uzasadnij, że jest zgodna ze strukturą systemu mechatronicznego.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z informacjami zawartymi w rozdziale 4.5. Poradnika dla ucznia,
2) zapoznać się z fragmentami literatury wskazanymi przez nauczyciela,
3) przeanalizować dokumentację techniczną systemu ”inteligentny dom”,
4) przedstawić w postaci graficznej strukturę funkcjonalną systemu „inteligentny dom”,
5) porównać strukturę funkcjonalną systemu „inteligentny dom” ze strukturą sytemu
mechatronicznego,
6) zapisać wnioski w karcie sprawozdania z wykonania ćwiczenia.
Wyposażenie stanowiska pracy:
−
literatura podana w rozdziale 6 Poradnika dla ucznia,
−
dokumentacja techniczna karty katalogowe systemu „inteligentny dom”,
−
arkusz papieru formatu A4,
−
przybory do pisania.
4.5.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) wskazać cele stosowania robota neutralizująco–wspomagającego
EXPERT?
2) scharakteryzować strukturę funkcjonalną robota neutralizująco–
wspomagającego EXPERT ?
3) wyjaśnić na czym polega synergia układów występujących
w systemie „inteligentny dom”?
4) scharakteryzować
możliwości
wykorzystania
w
systemach
mechatronicznych łożyska z sensorem?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
72
5. SPRAWDZIAN OSIĄGNIĘĆ
INSTRUKCJA DLA UCZNIA
1. Uważnie przeczytaj instrukcję.
2. Podpisz imieniem i nazwiskiem kartę odpowiedzi.
3. Zapoznaj się z zestawem zadań testowych.
4. Test zawiera 20 zadań. Do każdego zadania dołączone są 4 odpowiedzi. Tylko jedna jest
prawidłowa.
5. Udzielaj odpowiedzi na załączonej karcie odpowiedzi, stawiając w odpowiedniej rubryce
znak X. W przypadku pomyłki należy błędną odpowiedź zaznaczyć kółkiem, a następnie
ponownie zakreślić odpowiedź prawidłową.
6. Pracuj samodzielnie, bo tylko wtedy będziesz miał satysfakcję z wykonanego zadania.
7. Jeśli udzielenie odpowiedzi będzie Ci sprawiało trudność, wtedy odłóż rozwiązanie zadania
na później i wróć do niego, gdy zostanie Ci wolny czas.
8. Na rozwiązanie testu masz 45 minut.
Powodzenia!

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
73
ZESTAW ZADAŃ TESTOWYCH
1. Multifunkcjonalność urządzeń mechatronicznych polega na
a)
łatwości realizacji różnych zadań przez jedno urządzenie.
b)
możliwości podejmowania decyzji i komunikacji z otoczeniem.
c)
łatwości modyfikacji konstrukcji na etapie projektowania oraz produkcji
oraz eksploatacji urządzenia.
d)
możliwości niewidocznego dla operatora sposobu działania.
2. Synergia jest to
a)
reagowanie na bodźce zewnętrzne dochodzące od czujników.
b)
przetwarzanie i analiza sygnałów.
c)
możliwość uzyskiwania lepszych efektów pracy, niż suma możliwości elementów
składowych.
d)
realizacja działań zgodnie z założonym planem.
3. W urządzeniach mechatronicznych sterowanie jest realizowane najczęściej jako
a)
elektryczne i elektroniczne.
b)
hydrauliczne.
c)
pneumatyczne.
d)
mechaniczne.
4. Aktor w układach mechatronicznych jest to
a)
urządzenie do przechowywania informacji niezbędnych do działania układu.
b)
elektronicznie sterowany człon wykonawczy.
c)
urządzenie do przetwarzania informacji w układzie mechatronicznym.
d)
czujnik położenia.
5. Do kategorii sensorów zaliczyć można
a)
siłownik.
b)
silnik.
c)
bezpiecznik.
d)
czujnik indukcyjny.
6. Urządzeniem mechatronicznym nie jest
a)
drukarka laserowa.
b)
odtwarzacz CD.
c)
przekładnia łańcuchowa.
d)
robot przemysłowy.
7. Urządzeniem wyjściowym komputera jest:
a)
klawiatura.
b)
procesor.
c)
skaner.
d)
drukarka.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
74
8. Zadaniem efektora końcowego robota jest
a)
chwycenie i utrzymanie obiektu manipulacji.
b)
orientowanie i ustawianie elementu roboczego we właściwej pozycji.
c)
ustawianie położenia kiści robota.
d)
zabezpieczenie ramienia robota przed kolizją.
9. Przeznaczeniem czujnika typu „sztuczna skόra” jest
a)
określanie wilgotności środowiska pracy robota.
b)
wyczuwanie obecności przedmiotu oraz jego kształtu.
c)
zabezpieczenie obiektu manipulacji przed wypadnięciem z chwytaka.
d)
pomiar temperatury przedmiotόw chwytanych przez chwytak.
10. Programowanie robotόw polega na
a)
planowaniu czynności i parametrόw, jakie kolejno powinien zrealizować robot
w procesie manipulacji, wprowadzeniu ich do pamięci układu sterującego, testowaniu
oraz uruchamianiu,
b)
określaniu parametrόw położenia efektora końcowego w celu realizacji procesu
manipulacji obiektem,
c)
kontrolowaniu stanu wspόłpracujących urządzeń technologicznych w celu
ich synchronizacji z procesem manipulacji realizowanym przez robot,
d)
sprawdzaniu parametrόw procesu manipulacji w celu zapewnienia bezawaryjnej pracy
robota.
11. Cechą odrόżniającą roboty od manipulatorόw jest
a)
szybkość działania.
b)
duża dokładność pozycjonowania efektora.
c)
mały udźwig.
d)
uniwersalność.
12. Zadaniem układu sterowania obrabiarki sterowanej numerycznie jest
a)
przetwarzanie wprowadzonych informacji na sygnały sterujące przesyłane
do odpowiednich układów sterujących obrabiarki.
b)
kontrola poprawności działania podzespołów obrabiarki w celu uniknięcia awarii.
c)
generowanie informacji o stanie narzędzi skrawających obrabiarki.
d)
zabezpieczenie narzędzi skrawających obrabiarki przed nadmiernym zużyciem.
13. Parametrem określającym gotowość do pracy obrabiarki sterowanej numerycznie jest
a)
dokładność pozycjonowania.
b)
luzy w łożyskach.
c)
drgania obrabiarki.
d)
zamknięcie osłony zabezpieczającej.
14. System ochronny stanowiska zrobotyzowanego należący do grupy 1 umożliwia
a)
wykrywanie obecności człowieka w obszarze stanowiska zrobotyzowanego poza
zasięgiem ruchόw robota.
b)
wykrywanie obecności człowieka w obszarze stanowiska zrobotyzowanego wewnątrz
strefy ruchόw robota.
c)
wykrywanie obecności człowieka na granicy stanowiska zrobotyzowanego.
d)
wykrywanie obecności człowieka podczas bezpośredniego kontaktu z robotem.
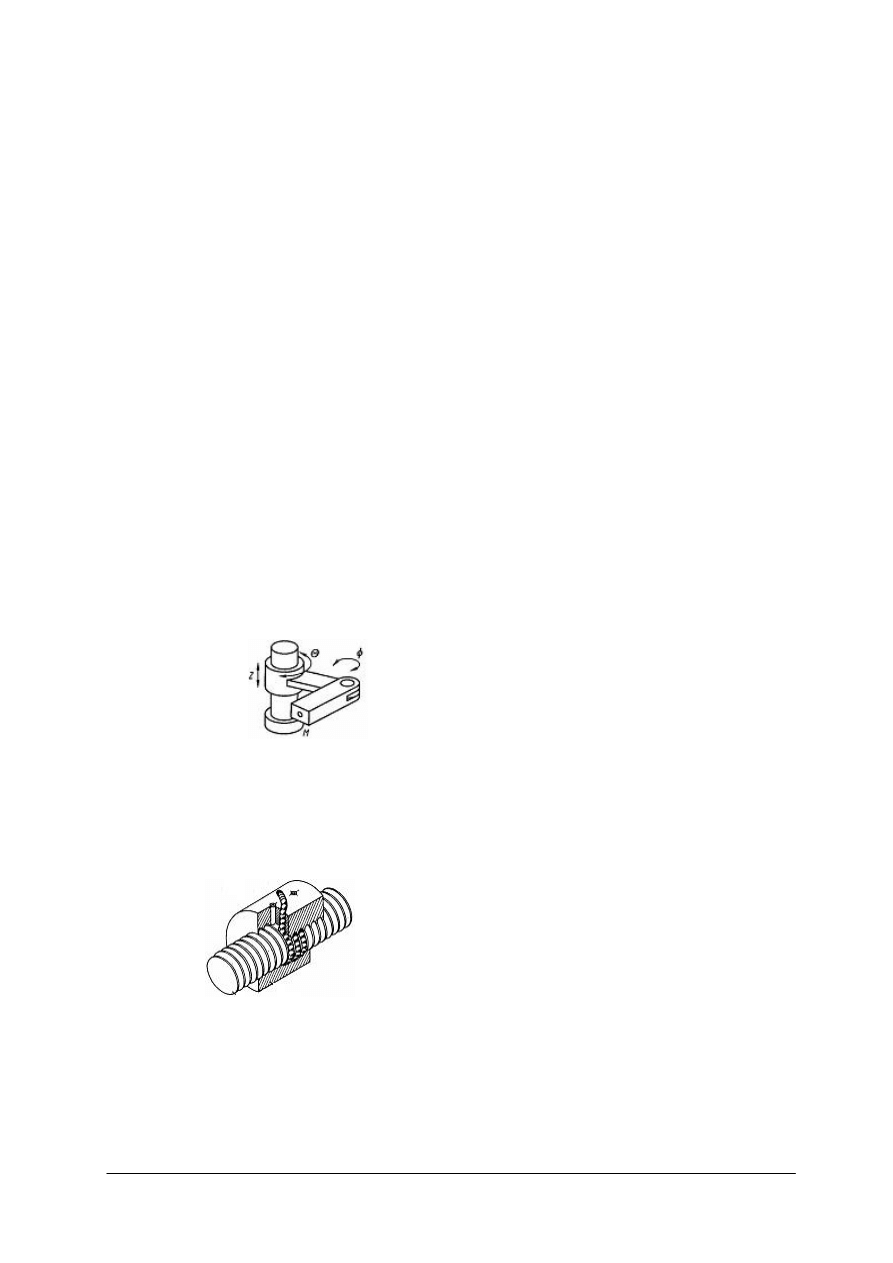
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
75
15. W łożysku mechatronicznym zastosowany jest sensor
a)
pojemnościowy.
b)
optyczny.
c)
sensor Halla.
d)
sensor ultradźwiękowy.
16. W „domu inteligentnym” system symulacji obecności realizuje
a)
utrzymanie stałej temperatury w wybranych pomieszczeniach.
b)
zapalanie/gaszenie oświetlenia w określonych pomieszczeniach o kreślonej godzinie.
c)
uruchomienie alarmu w przypadku np. stłuczenia szyby.
d)
włączenie spryskiwaczy w momencie wyczucia dymu.
17. Do kategorii sensorów w systemie „inteligentny dom” zaliczyć można
a)
ściemniacz oświetlenia.
b)
elektrozawór grzejnikowy.
c)
czujnik temperatury.
d)
napęd rolet.
18. W systemie sterowania przepływem gazu LPG elementem wykonawczym jest
a)
czujnik poziomu gazu.
b)
sonda lambda.
c)
czujnik rezerwy gazu.
d)
elektrozawór gazu.
19. Przedstawiony poniżej robot posiada strukturę kinematyczną
a)
SCARA.
b)
kartezjańską.
c)
cylindryczną.
d)
biegunową.
20. Na rysunku zamieszczonym poniżej przedstawiona jest przekładnia
a)
śrubowa.
b)
kulkowa.
c)
śrubowo–toczna.
d)
planetarna.
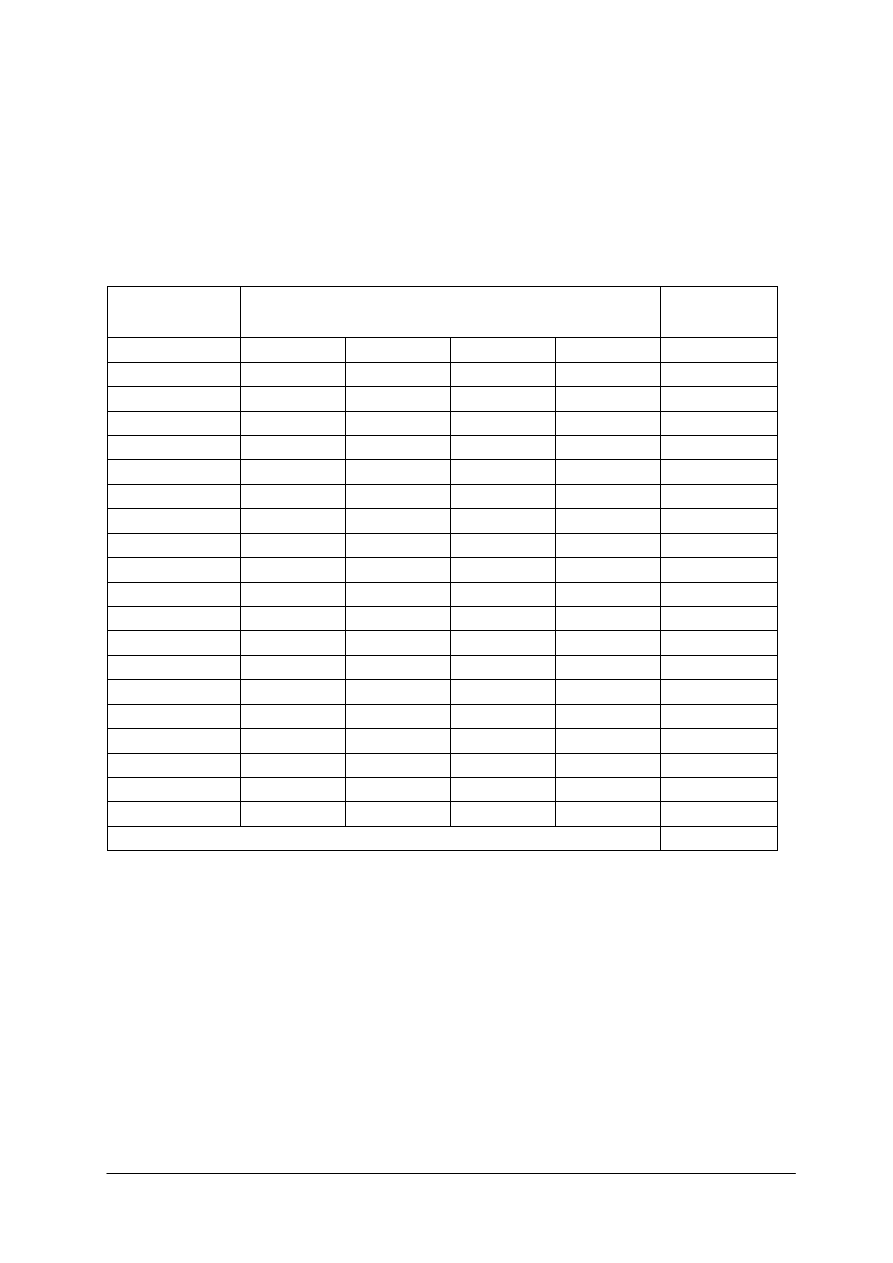
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
76
KARTA ODPOWIEDZI
Imię i nazwisko ...............................................................................
Analizowanie działania urządzeń i systemów mechatronicznych
Zakreśl poprawną odpowiedź.
Nr
zadania
Odpowiedzi
Punkty
1
a
b
c
d
2
a
b
c
d
3
a
b
c
d
4
a
b
c
d
5
a
b
c
d
6
a
b
c
d
7
a
b
c
d
8
a
b
c
d
9
a
b
c
d
10
a
b
c
d
11
a
b
c
d
12
a
b
c
d
13
a
b
c
d
14
a
b
c
d
15
a
b
c
d
16
a
b
c
d
17
a
b
c
d
18
a
b
c
d
19
a
b
c
d
20
a
b
c
d
Razem:
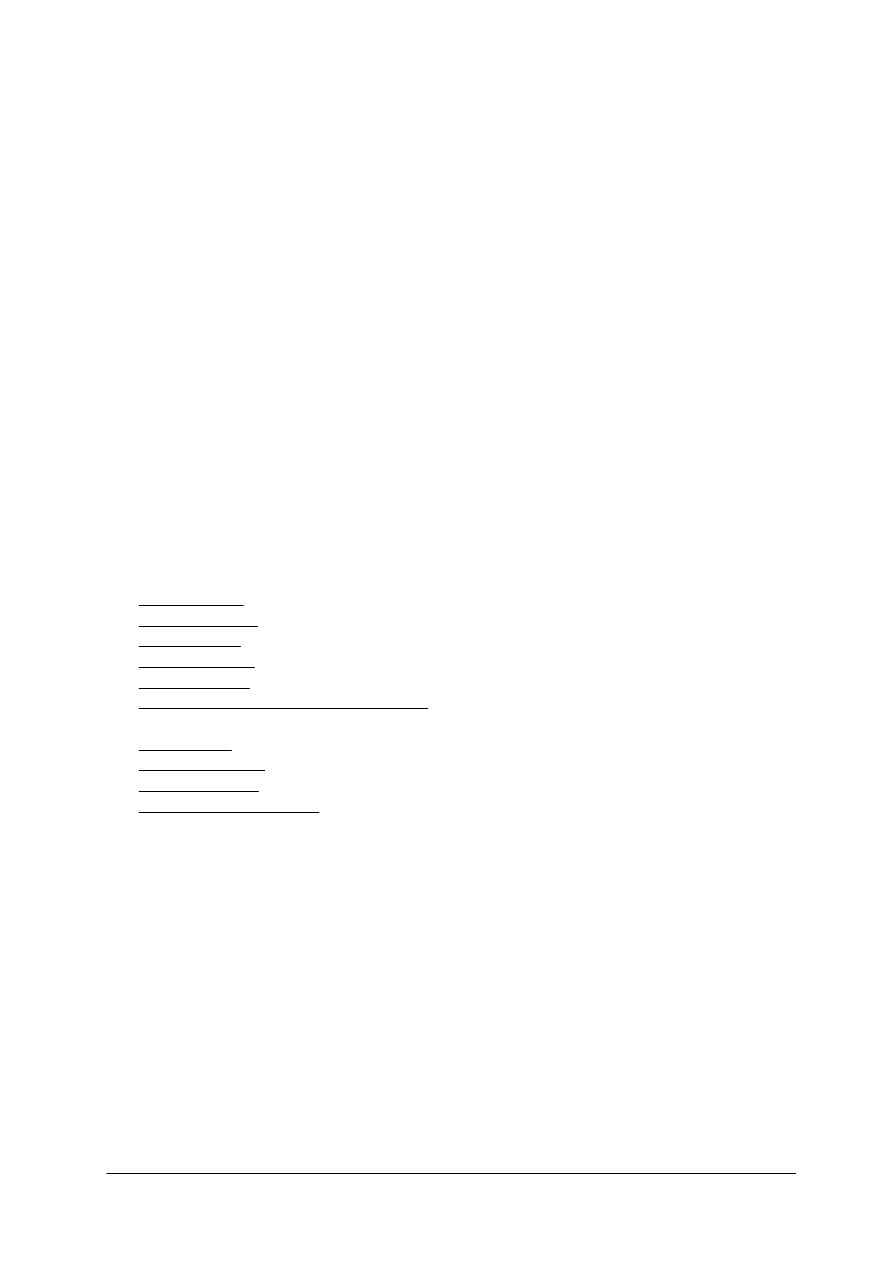
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
77
6. LITERATURA
1. Biuletyn automatyki nr 3/2004; Astor
2. Dąbrowski W., Nowak S.,Michalak G.: Informatyka 1,Akademickie podręczniki
multimedialne.Ośrodek Kształcenia na Odległość, Politechnika Warszawska, Warszawa
2002
3. Gawrysiak M., Mechatronika i projektowanie mechatroniczne., Wydawnictwo Politechniki
Białostockiej, Białystok, 1997
4. Heimann B., Mechatronika. PWN, Warszawa, 2001
5. Honczarenko J. Roboty przemysłowe – elementy i zastosowanie. WNT, Warszawa 1996
6. Instrukcja instalacyjna systemu D 2000, firmy ADK Group
7. Instrukcja montażu systemu sterowania przepływem gazu LPG „DETEC Super”
DTS01D.T. Gas System Spółka Jawna
8. Kornowicz-Sot A. : Automatyka i robotyka – robotyka. WSiP, Warszawa 1999
9. Morecki A. , Knapczyk J. : Podstawy robotyki. WNT, Warszawa 1994
10. Olszewski M. [red.] : Manipulatory i roboty przemysłowe. WNT , Warszawa 1985
11. Paderewski K., Obrabiarki. WSiP,Warszawa 1993
12. Skibicki D.: Wykład: Budowa i działanie komputera. 2003
13. Schmid D., Baumann A., Kaufmann H., Paetzold H., Zippel B.: Mechatronika. REA,
Warszawa 2002
14. Szydelski Z.: Napęd i sterowanie hydrauliczne Wydawnictwa Komunikacji i Łączności,
Warszawa 1993
15. www.asimo.pl
16. www.buderus.pl: Dokumentacja techniczno–ruchowa automatycznego kotła retortowego
17. www.fanuc.pl Karty katalogowe robotów
18. www.gorenje.pl: Pralki automatyczne i suszarki bielizny. 2004
19. www.haas.com
20. www.mechatronika.wm.pb.bialystok.pl; Gawrysiak M.: Wykłady Robotyka. 2004
21. www.mts – cnc.com.pl
22. www.piap.pl
23. www.robotyka.pl: teoria robotyki
24. www.siemens.pl: Katalog pralek, 2006
25. www.sound.eti.pg.gda.pl
26. Żółtowski B., Cempel C. (red): – Inżynieria diagnostyki maszyn : Polskie Towarzystwo
Diagnostyki Technicznej, Instytut Technologii Eksploatacji PIB Radom – Warszawa,
Bydgoszcz, Radom 2004
Katalogi firmowe:
Urządzenia optoeletroniczne – katalog firmy SICK (wersja elektroniczna)
Wyszukiwarka
Podobne podstrony:
Ocenianie stanu technicznego urządzeń i systemów (23 54)
Analizowanie działania układów hydraulicznych (23 58)
Analizowanie działania układów mikroprocesorowych (23 58)
05 Analiza działania podstawowych maszyn i urządzeń
Analizowanie działania oraz stosowanie podstawowych maszyn i urządzeń elektrycznych
Projektowanie układów elektrycznych urządzeń i systemów mechatronicznych (23 58)
05 Analiza działania podstawowych maszyn i urządzeń
Analizowanie działania maszyn i urządzeń elektrycznych
M JÓŹWIK Analiza przedsiębiorstwa jako systemu działańll
Analiza przedsiębiorstwa jako systemu działań Karim Zemirli gr A
ver 10 rozkad urzadzenia i systemy wytw cnc
Analiza?lowości działania państwowych funduszy?lowych oraz agencji
Diagnozowanie urządzeń i systemów mechatronicznych u
Analizowanie działania układów pneumatycznych u
,Urzadzenia i systemy multimedialne, pytania i odpowiedzi
więcej podobnych podstron