1
UKŁADY SEKWENCYJNE
1. Przerzutniki asynchroniczne i synchroniczne
2. Klasyfikacja układów sekwencyjnych
Układy sekwencyjne:
a) – układy procesowo zależne
- układy czasowo zależne
b) – układy Moore’a
- układy Mealy’ego
c) – układy asynchroniczne
- układy synchroniczne
d) – układy o programach liniowych
- układy o programach rozgałęzionych
e) - układy o działaniu cyklicznym
- układy acykliczne
f) – układy deterministyczne
- układy probabilistyczne
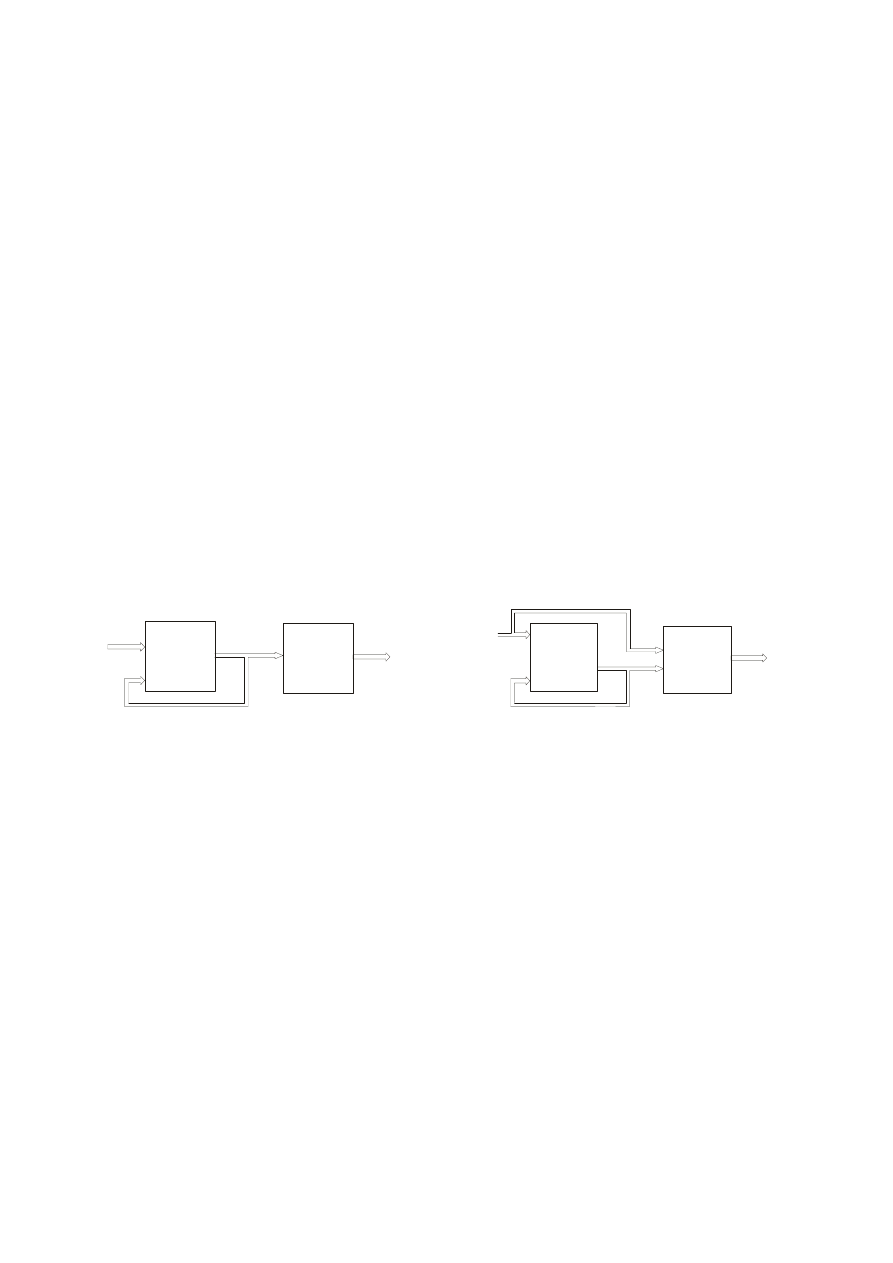
Schemat układu Moore’a
Schemat układu Mealy’ego
Funkcja przejść
Funkcja przejść
)
,
(
1
t
t
t
X
Q
Q
)
,
(
1
t
t
t
X
Q
Q
Funkcja wyjść
Funkcja wyjść
)
(
1
t
t
Q
Y
)
,
(
2
t
t
t
Q
X
Y
X
t
Q
t+1
Q
t
Y
t
X
t
Q
t+1
Q
t

2
3.
Synteza układów sekwencyjnych z elementów logicznych i
przerzutników
Ze względu na charakter zależności pomiędzy kolejnymi stanami sygnałów
oddziałujących na obiekt, można wyróżnić trzy typy procesów:
- w których określony jest czas trwania kolejnych faz procesu, a więc i czas trwania
kolejnych stanów sygnałów oddziałujących na obiekt,
- w których, czas trwania kolejnych faz procesu nie jest określony - rozpoczęcie
realizacji danej fazy uzależnione jest od zakończenia fazy poprzedniej,
- w których występują obydwa wymienione przypadki.
Układ przeznaczony do sterowania procesem pierwszego typu nazywa się układem
czasowo–zależnym. Układ taki nie ma sygnałów wejściowych, informujących o stanie
sterowania procesu. Układ czasowo-zależny realizować może tylko program liniowy. Układ
przeznaczony do sterowania procesem drugiego typu nazywa się procesowo-zależnym. Układ
sterowania procesami trzeciego typu jest rozwiązaniem pośrednim między układem czasowo
– zależnym a procesowo-zależnym.
Ogólnie w procesie syntezy układów sekwencyjnych można wyróżnić etapy:
- formalizacja założeń, czyli sformułowanie założeń w postaci umożliwiającej
tworzenie modelu matematycznego układu (w etapie tym wyodrębnia się stany
wewnętrzne, często w ilości większej niż jest to niezbędne, oraz przypisuje im stany
wyjść - przyjmuje się zatem model układu Moore’a. Najczęściej wyjściową formą
zapisu działania automatu jest pierwotna tablica przejść i wyjść, graf lub sieć działań,
- minimalizacja liczebności zbioru stanów wewnętrznych (w etapie tym podejmuje się
również decyzję o ewentualnej zmianie układu Moore'a na układ Mealy'ego, co
prowadzi do dalszego, zmniejszenia liczby stanów wewnętrznych),
- kodowanie, czyli przypisanie poszczególnym stanom wewnętrznym stanów sygnałów
pamięciowych,
- wyznaczanie funkcji wyjść,
- wyznaczanie funkcji przejść,
- sporządzenie schematów blokowych i montażowych,
- realizacja układu.
Przykład 1
W wielogniazdowym automacie montażowo-pakującym (rys. 1) wyroby po
zmontowaniu gromadzone są w magazynie 1 i ładowane w kilku gniazdach do pojemników 3.
Do poszczególnych gniazd co pewien czas dostarczany jest pusty pojemnik 3, który pozostaje
w gnieździe przez okres wtedy tylko wystarczający do pełnego załadowania, kiedy ładowanie
rozpocznie się natychmiast po dostarczeniu pojemnika do gniazda. W okresach kiedy w
magazynie nie ma wystarczającej do pełnego załadowania kolejnego pojemnika ilości wy-
robów z magazynu do pojemnika nie powinno być uruchamiane. Z automatu wydalane są
wtedy puste pojemniki. Sortowanie pojemników na puste i pełne odbywa się poza automatem.
Urządzenie przekładające 2 włączane jest przez sygnał y=1. Urządzenie to powinno
być włączone na czas trwania sygnału x
1
=1, informującego o obecności pojemnika w
gnieździe, lecz tylko wtedy jeżeli w momencie pojawienia się stanu x
1
=1sygnał x
2
=1. Sygnał
x
2
=1 informuje o tym, że w magazynie znajduje cię wystarczająca do pełnego załadowania
kolejnego pojemnika ilość wyrobów.
Należy zaprojektować układ sterujący urządzeniem przekładającym 2. Zadaniem tego
układu jest zabezpieczenie przed możliwością częściowego zapełniania pojemników.
3
y
x
1
x
2
1
2
3
Rys. 1. Schemat do przykładu 1
Rozwiązanie
Projektowany układ ma jeden sygnał wyjściowy y (sterujący pracą urządzenia
przekładającego) oraz dwa sygnały wejściowe: x
1
i x
2
. Nie może to być układ kombinacyjny,
ponieważ dla x
1
=x
2
=1 zarówno może być y=0 (jeżeli stan x
1
=1 rozpoczął się gdy x
2
=0) jak i
y=1 (jeżeli stan x
1
=1 rozpoczął się gdy było x
2
=1). Jest to więc układ sekwencyjny. Ponieważ
zmiany stanu wyjść powinny zachodzić w momentach zmian stanów wejść, należy przyjąć, że
jest to układ asynchroniczny.
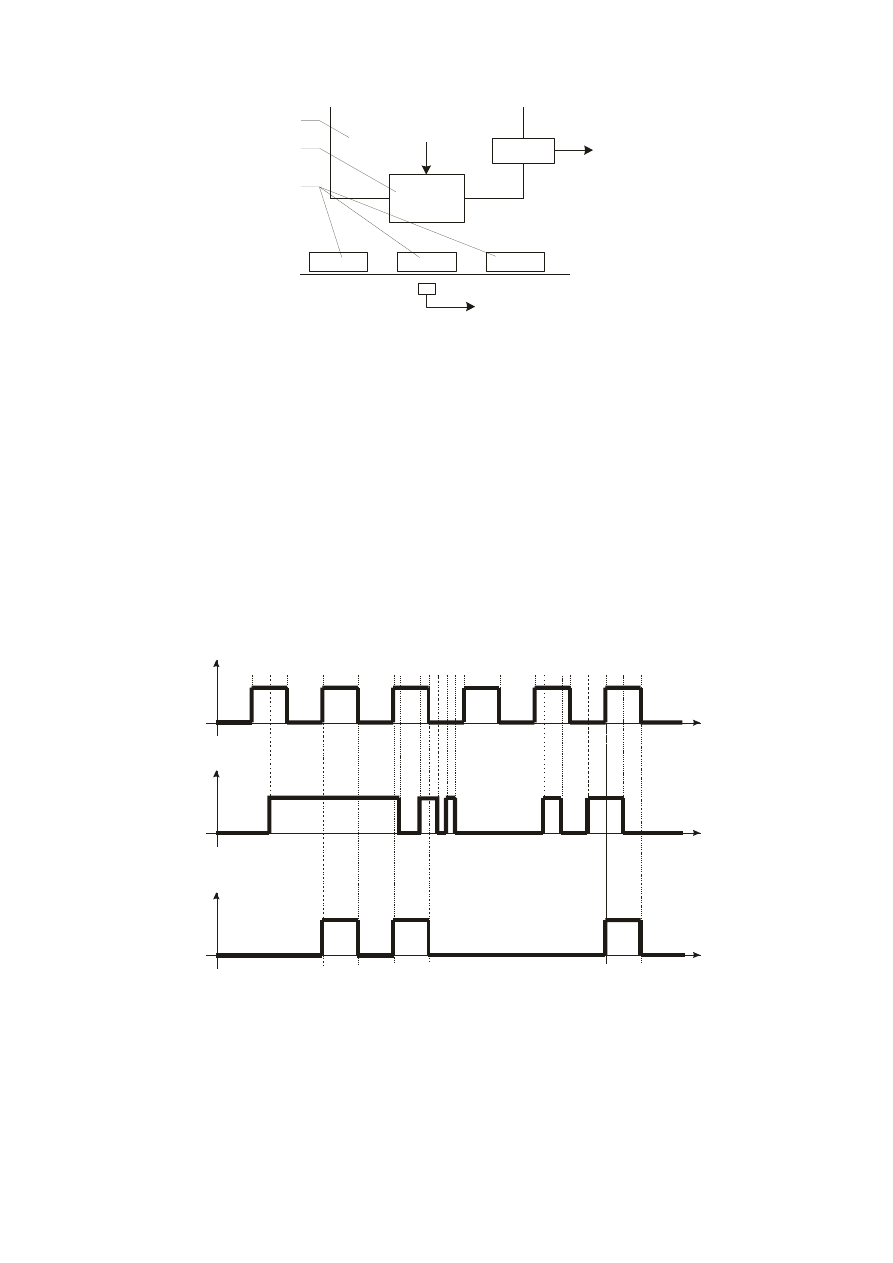
Dla układów o niewielkiej liczbie sygnałów wejściowych tablicę przejść i wyjść
tworzy się na podstawie przebiegów czasowych sygnałów. Ponieważ w trakcie pracy układu
wystąpić mogą różne sekwencje sygnałów wejściowych (nie ma określonego cyklu przebiegu
sygnałów – jest to więc układ o rozgałęzionym programie pracy), należy utworzyć
przykładowy przebieg czasowy sygnałów, starając się uwzględnić w nim wszystkie mogące
wystąpić podczas pracy sekwencje zmian. Przykład takiego przebiegu czasowego pokazano
na rys.
t
t
t
x
1
x
2
y
0
2
1
3
4
4
3
5 4 0
3
3
0 1
0 1 2 1 0 3 4 5
0
a)
4
t
t
t
x
1
x
2
y
0
2
1
3
4
4
3
5 4 0
3
3
0 1
0 1 2 1 0 3 4 5
0
0
1
2
3
4
5
Q
t+1
d)
e)
x
1
x
2
Q
t
00
01
11
10
y
0
1
2
Q
t+1
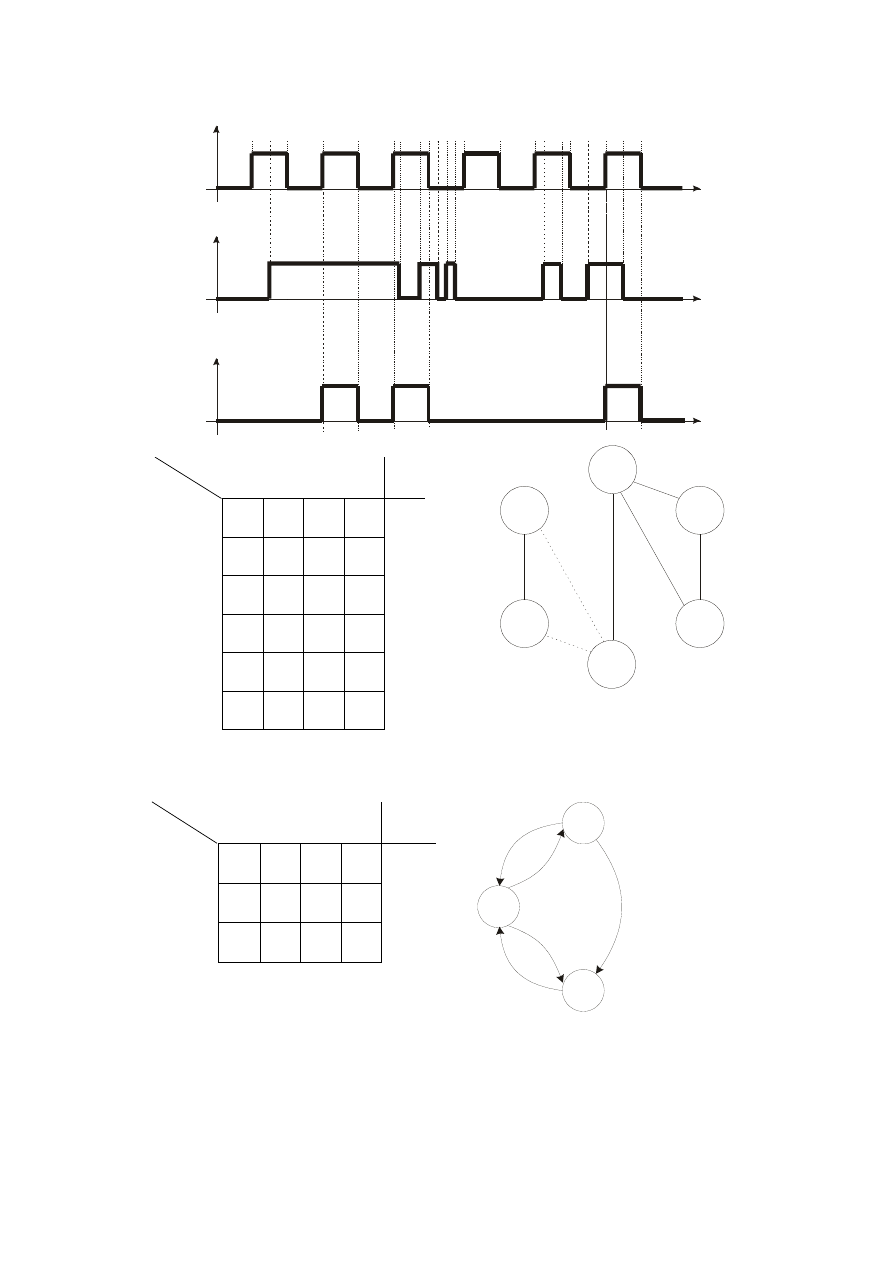
Rys. 2. Rysunek do przykładu 1: a) przebiegi czasowe sygnałów; b) pierwotna tablica przejść
i wyjść, c) wykres skracania, d) uproszczona (skrócona) tablica przejść i wyjść, e) wykres
przejść
x
1
x
2
Q
t
00
01
11
10
y
0
1
2
3
4
5
a)
b)
c)
1
2
0
5
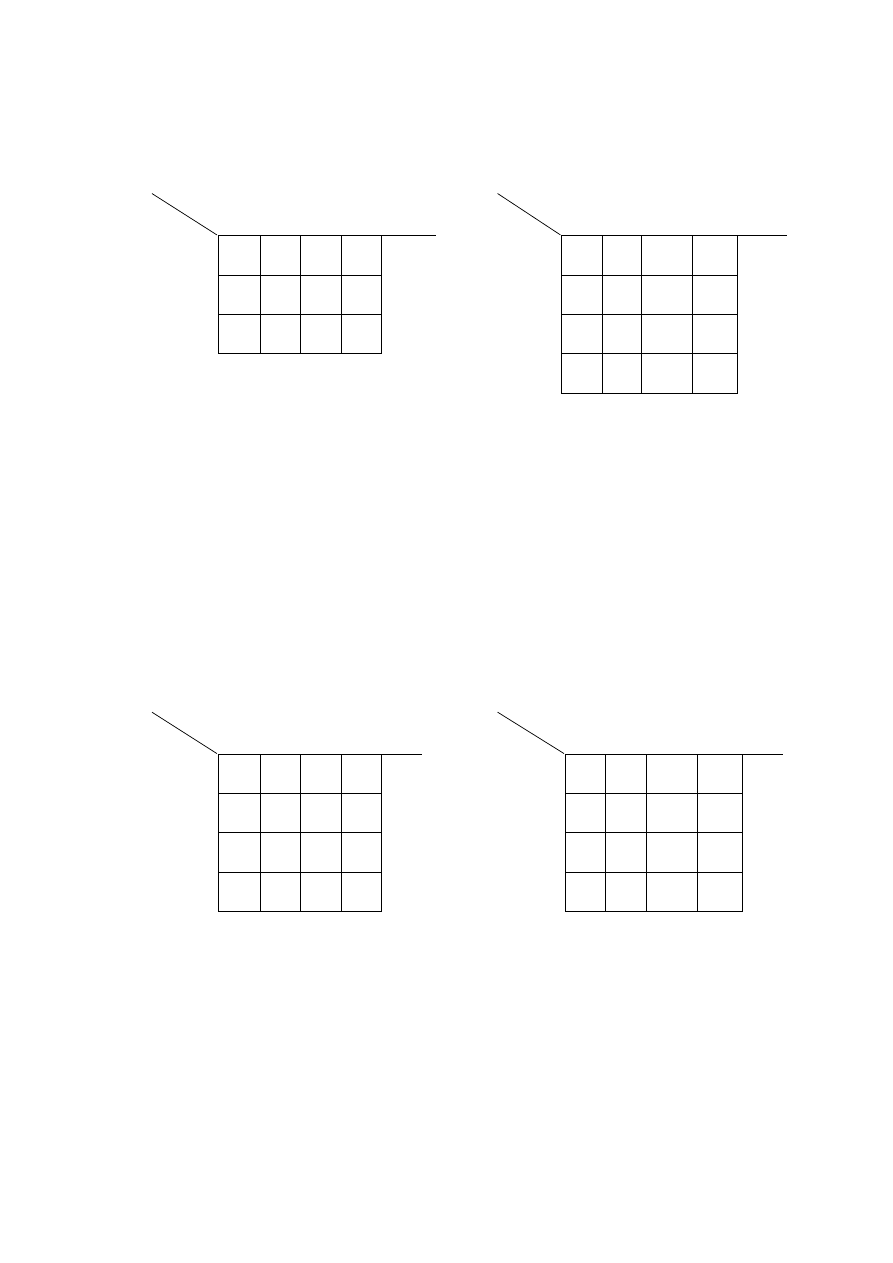
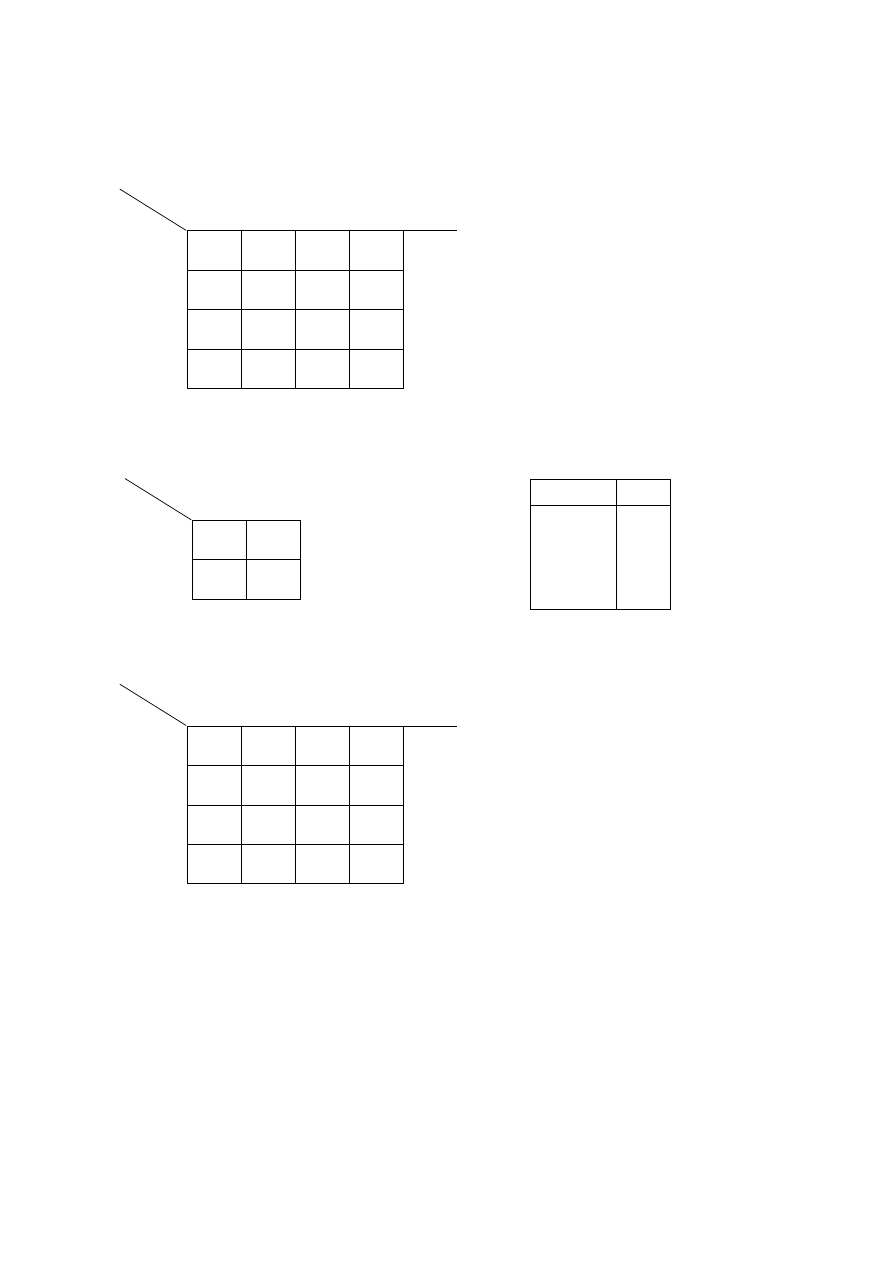
Wariant z przejściem cyklicznym
Tablica nie zakodowana
Tablica zakodowana
x
1
x
2
Q
t
00
01
11
10
y
0
1
2
Q
t+1
x
1
x
2
Q
1
Q
2
00
01
11
10
y
00
01
11
10
,
1
1
t
Q
1
2
t
Q
Funkcje przejść:
Fukcja wyjść:
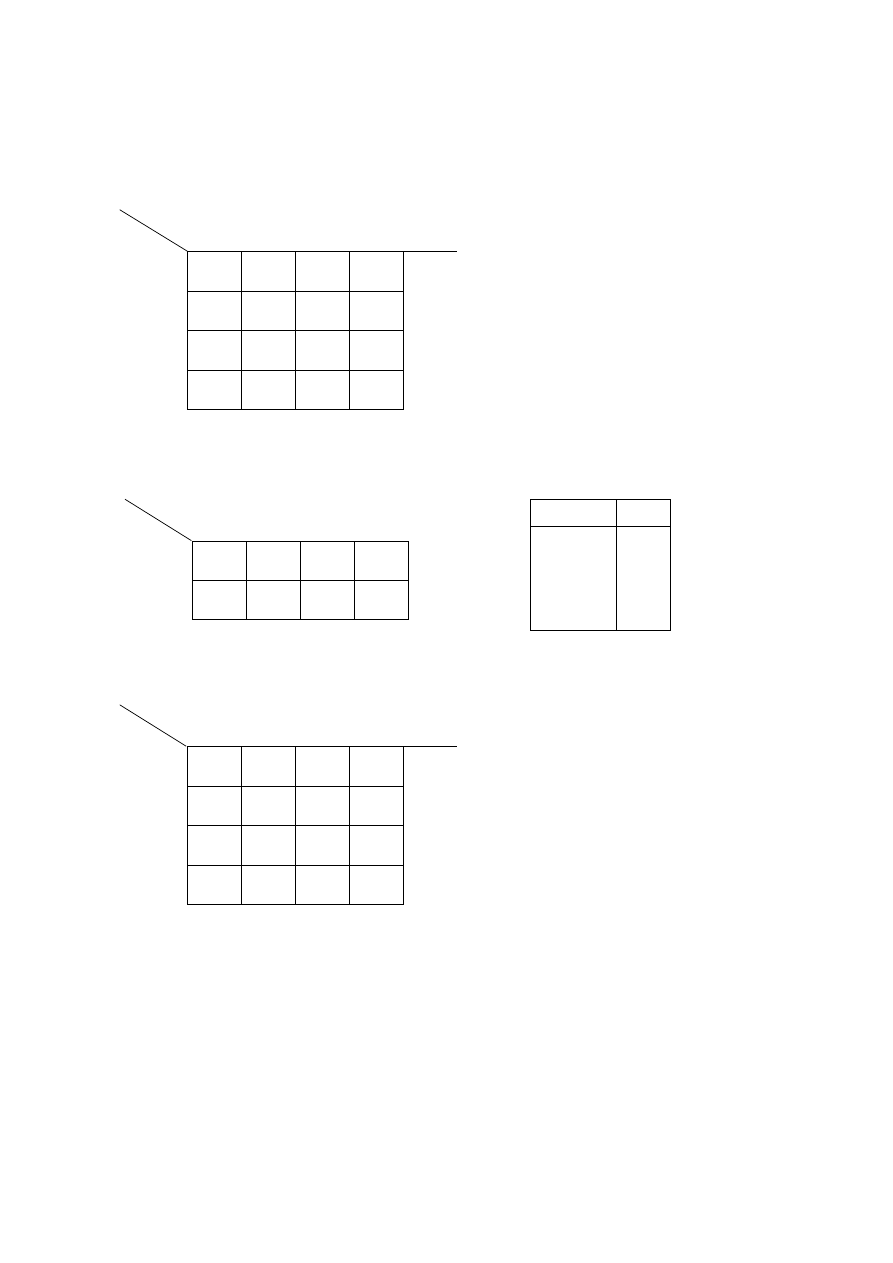
Wariant z dodatkowym stanem wewnętrznym
Tablica nie zakodowana
Tablica zakodowana
x
1
x
2
Q
t
00
01
11
10
y
0
1
2
3
Q
t+1
x
1
x
2
Q
1
Q
2
00
01
11
10
y
00
01
11
10
,
1
1
t
Q
1
2
t
Q
Funkcje przejść:
Fukcja wyjść:
6
Projektowanie układu z wydzielonym blokiem przerzutników wz
(wariant z dodatkowym stanem wewnętrznym)
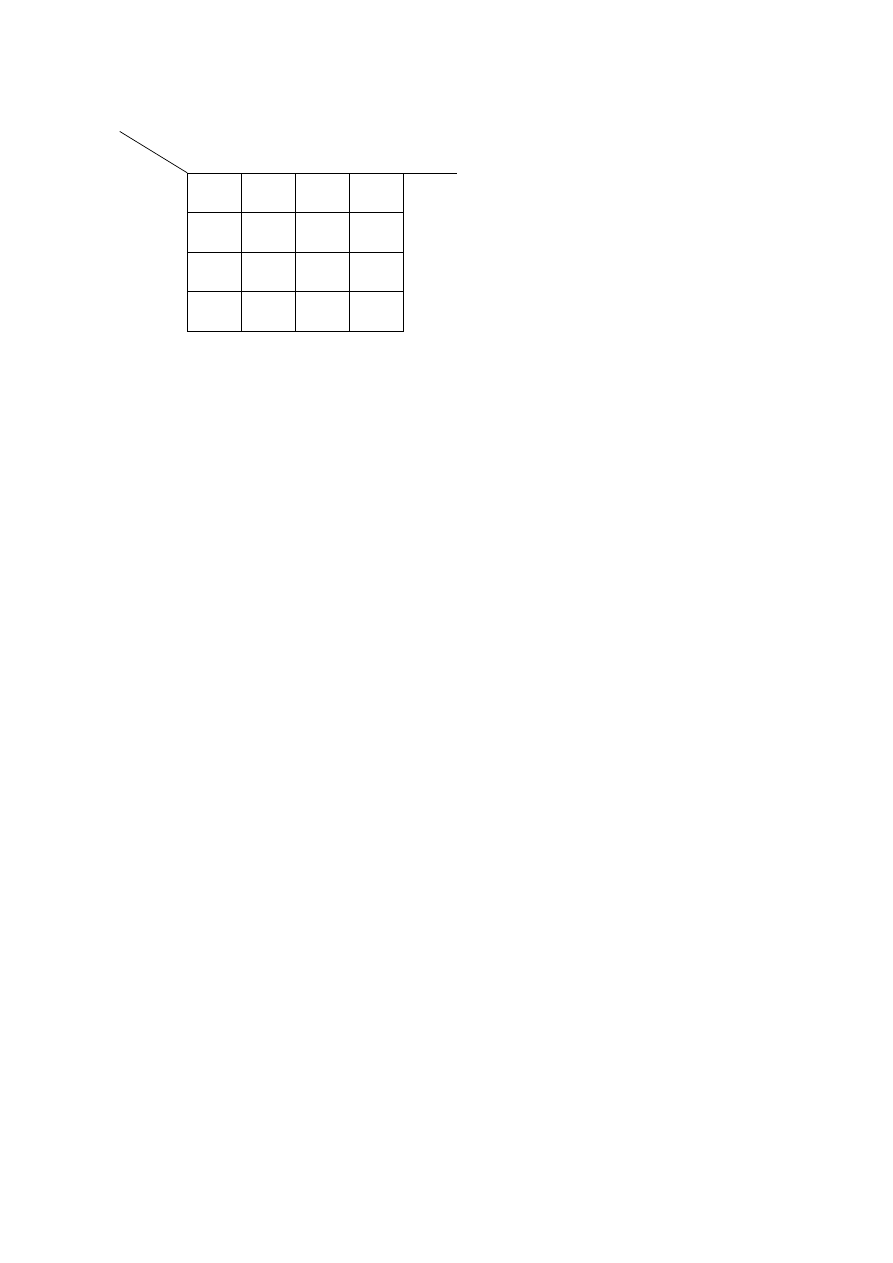
Tablica przejść i wyjść
x
1
x
2
Q
1
Q
2
00
01
11
10
y
00
01
11
10
,
1
1
t
Q
1
2
t
Q
Tablica przejść przerzutnika wz
Macierz przejść przerzutnika wz
wz
Q
t
00
01
11
10
0
0
0
-
1
1
1
0
-
1
Q
t+1
Q
t
Q
t+1
wz
0
0
0
1
1
1
1
0
0-
10
-0
01
Tablica wzbudzeń przerzutnika Q
1
Tablica wzbudzeń przerzutnika Q
2
x
1
x
2
Q
1
Q
2
00
01
11
10
00
01
11
10
w
1
z
1
x
1
x
2
Q
1
Q
2
00
01
11
10
00
01
11
10
w
2
z
2
Funkcje wzbudzeń:
w
1
=
w
2
=
z
1
=
z
2
=
Funkcja wyjść:
y =
7
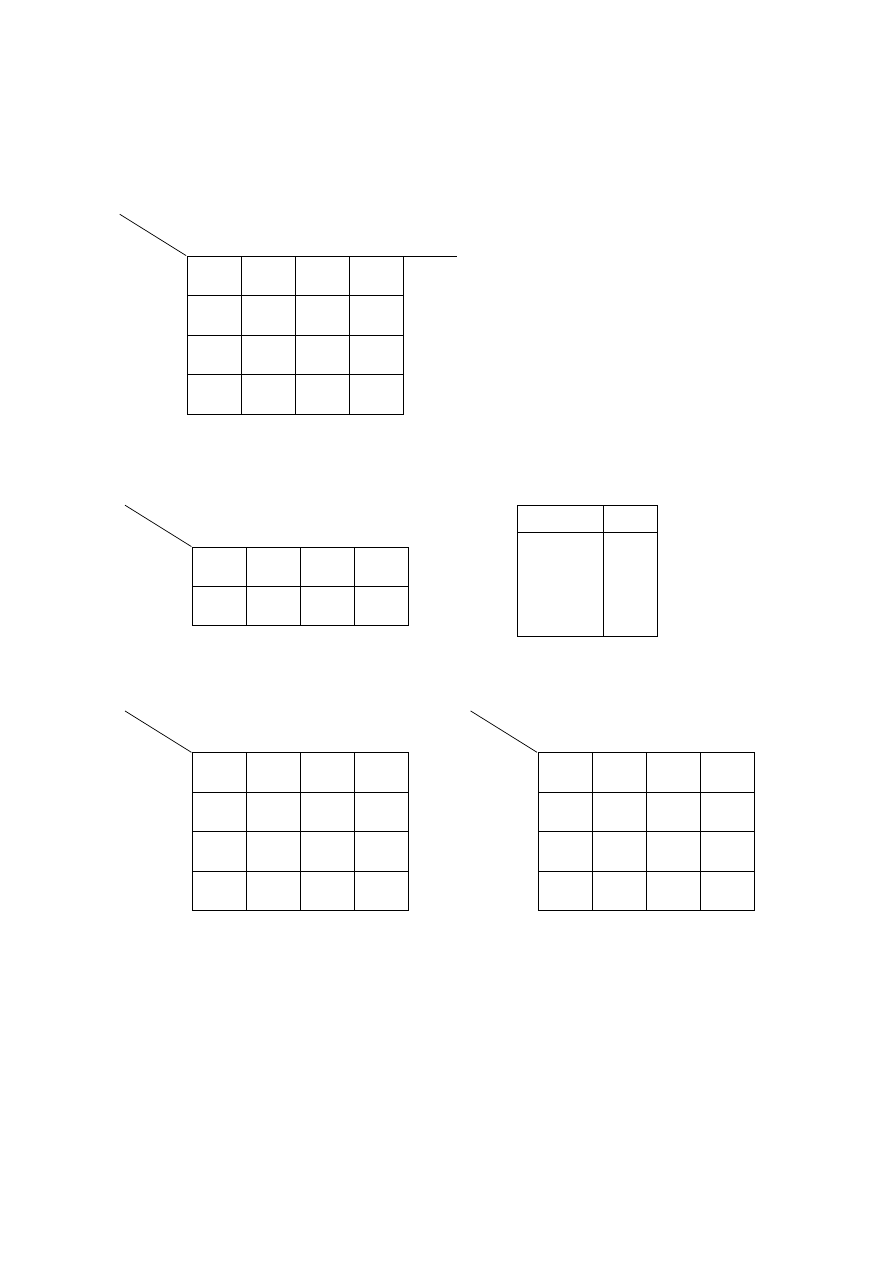
Uniwersalna tablica przejść i wyjść
x
1
x
2
Q
1
Q
2
00
01
11
10
y
w
F1 (F1, F-)
z
F0 (F0, F-)
00
01
11
10
,
1
1
t
Q
1
2
t
Q
Schemat układu
8
Układ synchroniczny z blokiem przerzutników JK
(oryginalna wersja układu)
x
1
x
2
Q
1
Q
2
00
01
11
10
y
J
F1 (F0, F1, F-)
K
F0 (F1, F0, F-)
00
01
11
10
,
1
Q
2
Q
Tablica przejść przerzutnika JK
Macierz przejść przerzutnika JK
JK
Q
t
00
01
11
10
0
0
0
1
1
1
1
0
0
1
Q
t+1
Q
t
Q
t+1
JK
0
0
0
1
1
1
1
0
0-
1-
-0
-1
Tablica wzbudzeń przerzutnika Q
1
x
1
x
2
Q
1
Q
2
00
01
11
10
y
00
01
11
10
J
1
K
1
Funkcje wzbudzeń:
J
1
=
J
2
=
K
1
=
K
2
=
Fukcja wyjść:
y =
9
Układ synchroniczny z blokiem przerzutników D
(oryginalna wersja układu)
x
1
x
2
Q
1
Q
2
00
01
11
10
y
00
01
11
10
,
1
Q
2
Q
Tablica przejść przerzutnika D
Macierz przejść przerzutnika D
D
Q
t
0
1
0
0
1
1
0
1
Q
t+1
Q
t
Q
t+1
D
0
0
0
1
1
1
1
0
0
1
1
0
Tablica wzbudzeń przerzutnika Q
1
x
1
x
2
Q
1
Q
2
00
01
11
10
y
00
01
11
10
1
D
Funkcje wzbudzeń:
D
1
=
D
2
=
Funkcja wyjść:
y =
Układ Mealy’ego asynchroniczny
10
0
1
2
3
4
5
Q
t+1
Tablica przejść uproszczona (skrócona)
Tablica wyjść
x
1
x
2
Q
t
00
01
11
10
y
0
0
3
-
1
0
1
0
-
2
1
0
2
-
3
2
1
0
3
0
3
4
-
0
4
-
3
4
5
1
5
0
-
4
5
1
x
1
x
2
Q
t
00
01
11
10
0
1
Q’
x
1
x
2
Q
t
00
01
11
10
0
1
y
a)
b)
Wyszukiwarka
Podobne podstrony:
E7Cyfrowe uklady sekwencyjne id Nieznany
na5 pieszak 03 02 10 1 id 43624 Nieznany
Politechnika Białostocka 03 Układy sterowania umożliwiające zmianę parametrów ruchu tłoka
15 Język Instruction List Układy sekwencyjne Działania na liczbach materiały wykładowe
Podstawy Automatyki Lab 10 CW3 Układy sekwencyjne elektroniczne
Zadania 4, układy sekwencyjno-czasowe
2 Instrukcja do laboratorium układy sekwencyjne
IMIC uklady nieinercjalne id 21 Nieznany
IO8Cyfrowe uklady sekwencyjne
Zadania 2, układy sekwencyjne
Cw 24 Uklady cyfrowe id 122415 Nieznany
Ćwiczenia, Instrukcja do ćwiczenia 4, Układy sekwencyjne - przerzutniki asynchroniczne i synchronicz
203 uklady sekwencyjne 2, Politechnika Wrocławska - Materiały, logika ukladow cyfrowych, sprawozdani
układy sekwencyjne, sem 4, Elektronika I i II, Elektronika II
7 uklady nieinercjalne id 4498 Nieznany (2)
Prez uklady rownan id 389687 Nieznany
więcej podobnych podstron