
Metody numeryczne w nauce i technice.
MATLAB
Laboratorium
Laboratorium z metod numerycznych – Informatyka Stosowana I .
Plan zajęć:
Wprowadzenie – informacje wstępne:
1. Wstęp do programowania w środowisku Matlab.
2. Macierze, wektory, układy równań liniowych.
3. Interpolacja i aproksymacja.
4. Przybliżone rozwiązywanie równań nieliniowych.
5. Całkowanie i różniczkowanie numeryczne.
6. Rozwiązywanie równań różniczkowych zwyczajnych.
7. Kolokwium zaliczeniowe.
1.0 Wprowadzenie do metod numerycznych.
Metody numeryczne
są działem matematyki, zajmującej się opracowywaniem metod
przybliżonego rozwiązywania zagadnień matematycznych, których rozwiązanie sposobami
analitycznymi (ścisłymi) jest trudne, albo wręcz niemożliwe.
1.1 Oszacowanie dokładności obliczeń i analiza błędów.
Błędy opisu matematycznego analizowanego zjawiska
Błędy początkowe
(błędy danych wejściowych)
Błędy obcięcia
(skończona liczba działań)
Błędy zaokrągleń
(niedokładna reprezentacja liczb rzeczywistych)
Zadania źle uwarunkowane
– niewielka względna zmiana danych powoduje duże względne
zmiany jego rozwiązania.
Algorytm jest
numerycznie poprawny
, jeżeli dla dokładnych danych wejściowych daje
rozwiązania będące rozwiązaniami zadania dla niewiele zaburzonych tych danych.
(nie dotyczy deterministycznych układów chaotycznych☺)
1.2 Podstawowe komendy Matlaba
%
- komentarz, objaśnienia
clc
- czyści okno poleceń Command Window
clf
- czyści okno graficzne Figure
clear x
- usuwa zmienną x z pamięci
clear all
- usuwa wszystkie zmienne z pamięci
who,whos
- wyświetla zdefiniowane zmienne
lenght(x)
- zwraca długość wektora
size(M)
- zwraca rozmiar macierzy, ilość wierszy i kolumn
t=t1:Dt:t2
- definiuje wektor o poczatku t1, krok Dt, końcu t2.
M’
- transpozycja macierzy M
A*B
- iloczyn macierzy A i B
sum(x)
- suma elementów wektora x
prod(x)
- iloczyn elementów wektora x
det(A)
- wyznacznik macierzy kwadratowej A
Przepisał: Blick © Materiały dostarczył: qWest © Pomagał: L3Vy ©
PWSZ Tarnów 2007
2
Laboratorium z metod numerycznych – Informatyka Stosowana I .
lu
- rozkład macierzy na macierze trójkątne
[L,U]-lu(A)
- L*U=A
[L,U,P]=lu(A)
- L*U=PA
-
L
– macierz trójkątna dolna
-
U
– macierz trójkątna górna
-
P
– macierz permutacji
eye(n)
- macierz jednostkowa o wymiarze (n x n)
inv(A)
- macierz odwrotna
eig(A)
-
wektor
wartości własnych macierzy kwadratowej A
[V,D]=eig(A)
-
D
- diagonalna macierz wartości własnych A
-
V
– macierz, której kolumny odpowiadają wektorom własnym
spełniającym A*V=V*D
ones(m,n)
- macierz jedynek (m x n)
zeros(m,n)
- macierz zer (m x n)
2.0 Macierze, wektory, układy równań liniowych.
M-plik funkcyjny –
nazwa funkcji.m
Kod:
fun1.m
----------------------------
function y=fun1(x)
% opis fukcji
y=4*sin(3*x).*exp(-x/2);
============================
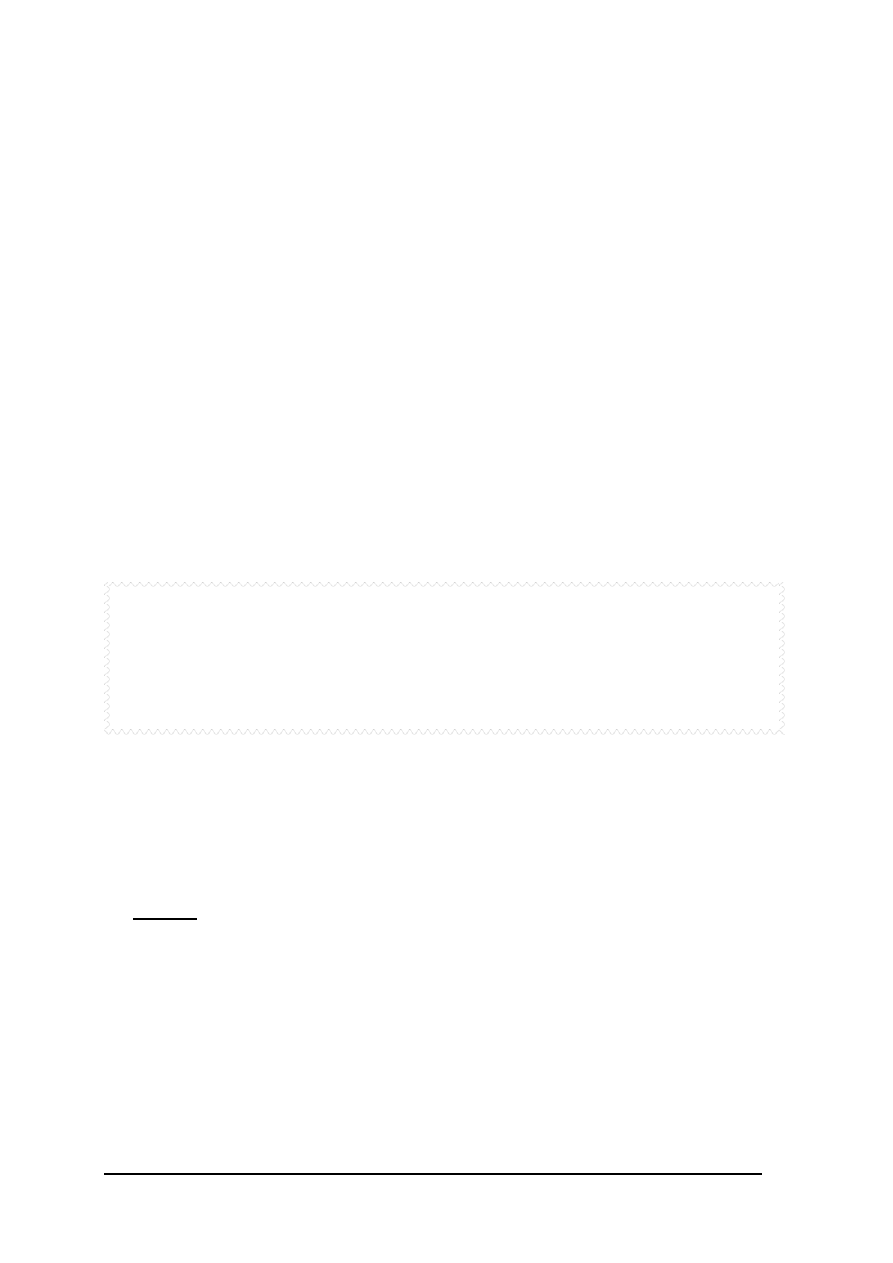
p2.m
----------------------------
clear all
t=1:0.2:10;
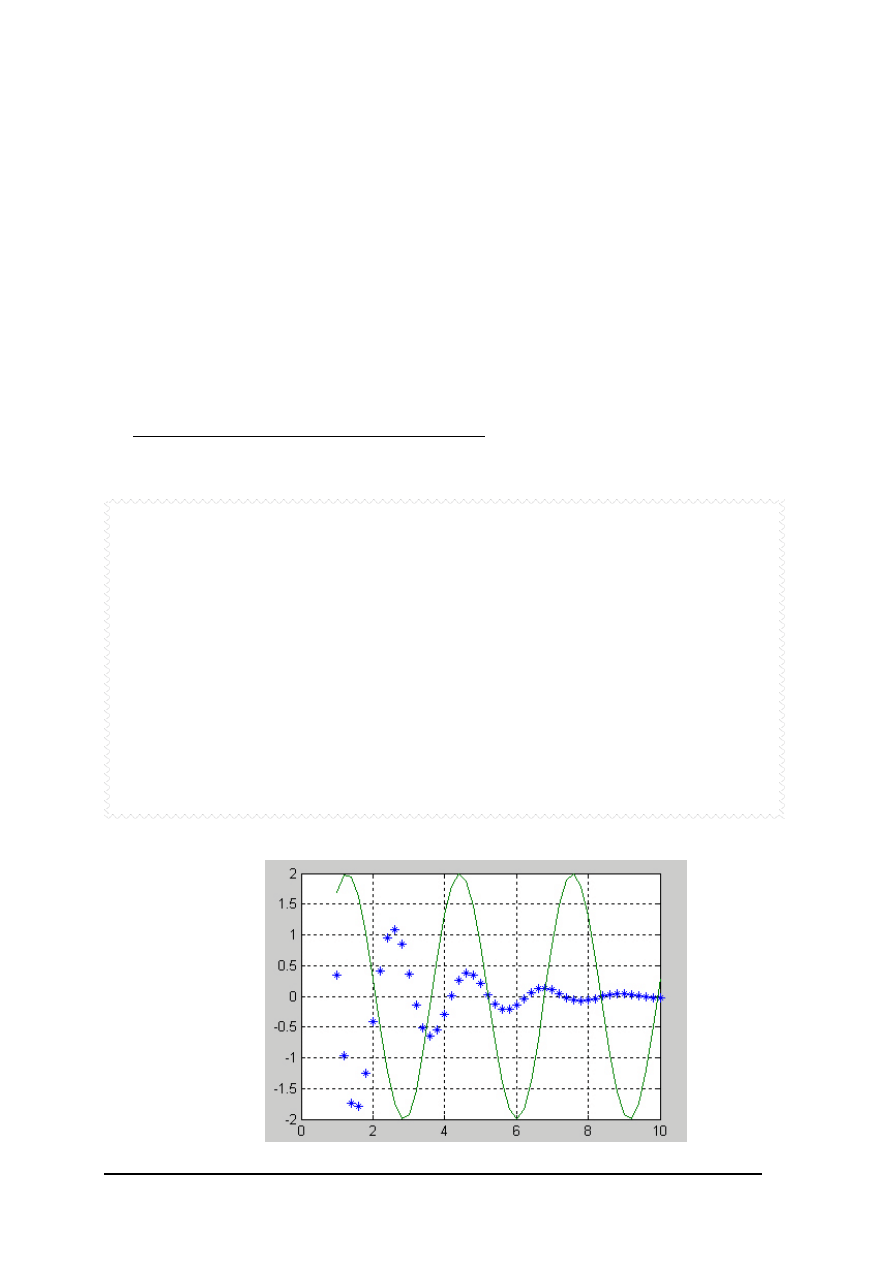
y=2*sin(2*t-1);
b=fun1(t);
plot(t,b,’xr’,t,y), grid on
pause(3)
grid off
Wynik przedstawia się następująco:
Przepisał: Blick © Materiały dostarczył: qWest © Pomagał: L3Vy ©
PWSZ Tarnów 2007
3
Laboratorium z metod numerycznych – Informatyka Stosowana I .
2.1 Macierze i wektory
M1=[1
2
3
W1=[1
2
3]
4 5 6]
M1=
W1=
1 2 3
1 2 3
4 5 6
W2=[1
2
3]’
M2=[1 2 3;4 5 6;7 8 9]
W2=
1
M2=
2
1 2 3
3
4 5 6
7 8 9
W3=1:2:8
W3=
1 3 5 7
2.2 Rozwiązywanie układów równań liniowych
Układ równań liczbowych
a
11
*x
1
+a
12
*x
2
+…+a
1k
*x
k
+…+a
1n
*x
n
=b
1
a
21
*x
1
+a
22
*x
2
+…+a
2k
*x
k
+…+a
2n
*x
n
=b
2
a
k1
*x
1
+a
k2
*x
2
+…+a
kk
*x
k
+…+a
kx
+x
n
=b
k
a
n1
*x
1
+a
n2
*x
2
+…+a
nk
*x
k
+…+a
xn
*x
n
=b
n
Przykład liczbowy
( )
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
=
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
=
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
=
=
≠
=
−
=
−
+
+
−
=
−
+
−
+
−
=
+
+
−
)
(
)
(
*
0
)
det(
*
15
4
2
4
11
4
2
9
7
2
21
2
6
6
7
3
3
2
1
1
3
x
2
x
1
x
x
x
x
z
y
x
x
B
A
x
B
x
A
A
x
z
y
x
x
z
y
x
y
x
z
y
x
Zapis w Matlabie
Przepisał: Blick © Materiały dostarczył: qWest © Pomagał: L3Vy ©
PWSZ Tarnów 2007
4
Laboratorium z metod numerycznych – Informatyka Stosowana I .
2.3
Rozkład LU
Kod:
% Równanie
A * x = B
(1)
% Rozkład LU
P * A = L * U
% Równanie (1) obustronnie mnożymy przez P
P * A *x = P * B
%
Stosujemy rozkład LU
L * U *x = P * B
% Wprowadzamy nową zmienną
U * x = y
% Otrzymujemy równanie o macierzy trójkątnej
L * y = P * B
Przykład m2.m
Kod:
A=[1 2 3;2 3 4;3 4 6];
B=[7;8;9];
[L,U,P]=lu(A);
n=length(B);
PB=P *B;
% dla macierzy L
y(1)=PB(1)/L(1,1);
for k=2:n
y(k)=(PB(k)-L(k,1:k-1)*y(1:k-1))’)/L(k,k);
end
% dla macierzy U
x(n)=y(n)/U(n,n);
for k=1:n-1
x(n-k)=(y(n-k)-U(n-k,n-k+1:n)*x(n-k+1:n))’)/U(n-k,n-k);
end
x’
2.4 Rozwiązania w Matlabie
Macierz kwadratowa → A * x = B
det(A) ≠ 0
Kod:
x=A
-1 *
B
x=inv(A) * B
Przepisał: Blick © Materiały dostarczył: qWest © Pomagał: L3Vy ©
PWSZ Tarnów 2007
5
Laboratorium z metod numerycznych – Informatyka Stosowana I .
Inne przypadki: układy nadokreślone i niedookreślone
x=A\B
%Matrix left division \ of Galois arrays
x=pinv(A)B
%Moore-Penrose pseudoodwrotna macierz
Przykład 1
Rozwiąż równanie
Lx –B
T
=2* Ex
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
−
−
=
6
5
0
9
2
1
4
7
5
A
[
]
30
20
10
−
=
B
L – jest macierzą trójkątna dolna po permutacji macierzy A
E – jest macierzą jednostkową o wymiarach macierzy A
Kod:
A=[5 -7 4; =3 2 9; 0 5 6];
B=[-10 20 30];
[L,U,P]=lu(A);
E=eye(size(A));
X=(L-2*E)\B’
Otrzymujemy wynik:
x=
10.0000
-20.0000
-27.2000
2.5
Zadania
1.
4x+3y+6=14+3x-2y-8;
6y+15+3z=-4x+3;
2x-25+2y=3x+3y-3x;
Oblicz y oraz s = x
2
+y
2
+z
2
2.
Przepisał: Blick © Materiały dostarczył: qWest © Pomagał: L3Vy ©
PWSZ Tarnów 2007
6
Laboratorium z metod numerycznych – Informatyka Stosowana I .
7
⎤
⎢
⎢
⎢
⎣
⎡
−
−
=
9
2
3
4
7
5
A
⎥⎦
6
5
9
⎥
⎥
[
]
30
20
10
−
=
B
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
=
3
2
1
x
x
x
x
U – jest macierzą trójkątna górna macierzy A
E – jest macierzą jednostkową o wymiarach macierzy A
D – jest wyznacznikiem macierzy A
Rozwiąż równanie
Ux-5B
T
=d* Ex
Rozwiązania
1.
Kod:
A=[1 3 8;4 6 0;5 -1 -3];
B=[8;-15;25];
x=A\B;
y=x(2)
s=x’*x
Wynik:
y= -6.7000
s= 103.9400
2.
Kod:
A=[5 -7 4;-3 2 9;0 5 6];
B=[-10 20 30];
[L,U]=lu(A);
d=det(A);
E=eye(size(A));
x=(U-d*E)\(5*B’)
Wynik:
x=
-0.1397
0.2740
0.4109
2.6 Układ nadmiarowy – ilośc równań większa od ilości niewiadomych.
Przepisał: Blick © Materiały dostarczył: qWest © Pomagał: L3Vy ©
PWSZ Tarnów 2007
Laboratorium z metod numerycznych – Informatyka Stosowana I .
Dla pomiarów [t
1
,y
1
]
t
1
0.1 0.3 0.5 0.9 1.2 1.6 2.2 2.8
y
1
2.5 2.3 2.7 2.9 2.5 2.0 1.4 1.2
Wyznaczyc współczynniki C
1
równania y=f(t)
2
-3t
3
-t
2
1
e
*
C
e
*
C
C
y(t)
+
+
=
Kod:
t=[0.1 0.3 0.5 0.9 1.2 1.6 2.2 2.8]’
y=[2.5 2.3 2.7 2.9 2.5 2.0 1.4 1.2]’
plot(t,y.’o’)
% y=C1+C2*exp(-t)+C3*exp(-3*t.^2)
A=[ones(size(t)) exp(-t) exp(-3*t.^2)]
C=A\y
pause
%dalej
–
“enter”
w oknie polecen matlaba
clf
tt=[0:0.01:3]’;
AA=[ones(size(tt)) exp(-tt) exp(-3*tt.^2)];
yy=AA*C;
plot(tt,yy,t,y,’o’),grid on, hold on
2.7 Układ niedookreślony – ilość równań mniejsza niż ilość niewiadomych
% R*x=B
m5.m
% R=[R1 R2],
R=[6
8
7
3
5
% x=[x1’ x2’]’
3 5 4 1 3
% R1*x1+R*x2=B
2 5 3 7 2]
% x1*x1=B-R2*x2
[n,m]=size(R)
R1=R(:,1:n)
R2=R(:,n+:m)
B=[2 1 4]’
x2=[1 1]’
x1=R1\)B-R2*x2)
x=[x1’
x2’]’
blad=B-R*x
3.0 Interpolacja i aproksymacja.
Interpolacja
Zadanie znalezienie funkcji F(x) przechodzącej przez zadane punkty (x,y) nazywamy
I N T E R P O L A C J Ą
(po łacinie inter – między, polus – węzeł)
Punkty (x,y) nazywamy węzłami interpolacji.
Istnieje funkcja:
Przepisał: Blick © Materiały dostarczył: qWest © Pomagał: L3Vy ©
PWSZ Tarnów 2007
8
Laboratorium z metod numerycznych – Informatyka Stosowana I .
]
[
),
(
0 n
x
x
x
x
f
y
∈
=
Należy wyznaczyć funkcję F(x), taką aby:
y
x
F
=
)
(
3.1 Metoda Funkcji bazowych
F(x) jest liniową kombinacją n=1 funkcji bazowych
∑
=
=
n
i
i
i
n
x
a
x
F
x
x
x
0
1
0
)
(
)
(
),
(
)
(
),
(
ϕ
ϕ
ϕ
ϕ
K
Wprowadzając macierz bazową
φ
[
]
)
(
)
(
)
(
)
(
1
0
x
x
x
x
n
ϕ
ϕ
ϕ
φ
K
=
i macierz współczynników A
[
]
T
n
a
a
a
A
K
1
0
=
A
x
x
F
∗
=
)
(
)
(
φ
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
=
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
∗
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
=
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
n
n
n
n
n
n
n
n
n
y
y
y
a
a
a
x
x
x
x
x
x
x
x
x
x
F
x
F
x
F
M
M
K
L
L
K
K
M
1
0
1
0
1
0
1
1
1
1
0
0
1
1
0
0
1
0
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
Y
x
x
F
Y
A
∗
∗
=
=
∗
−1
)
(
)
(
φ
φ
φ
Jeżeli funkcje bazowe są wielomianami to
interpolacja wielomianowa
np. interpolacja
wielomianami
Langrange`a
,
jednomianami
n
n
x
x
=
)
(
ϕ
3.2 Wielomiany
2
7
3
6
4
)
(
)
(
2
4
5
0
+
+
−
+
=
∈
=
∑
−
−
−
x
x
x
x
x
p
N
i
x
p
x
p
n
i
i
n
i
n
Przepisał: Blick © Materiały dostarczył: qWest © Pomagał: L3Vy ©
PWSZ Tarnów 2007
9
Laboratorium z metod numerycznych – Informatyka Stosowana I .
Funkcje MATLABA
p= [4 6 0 -3 7 2]
% zapis wielomianu o współczynnikach p
y=polyval(p,x)
% oblicza wartość wielomianu dla x
p=polyfit(x,y,n)
% znajduje współczynniki wielomianu n-tego stopnia
aproksymującego dane (x
i
y
i
)
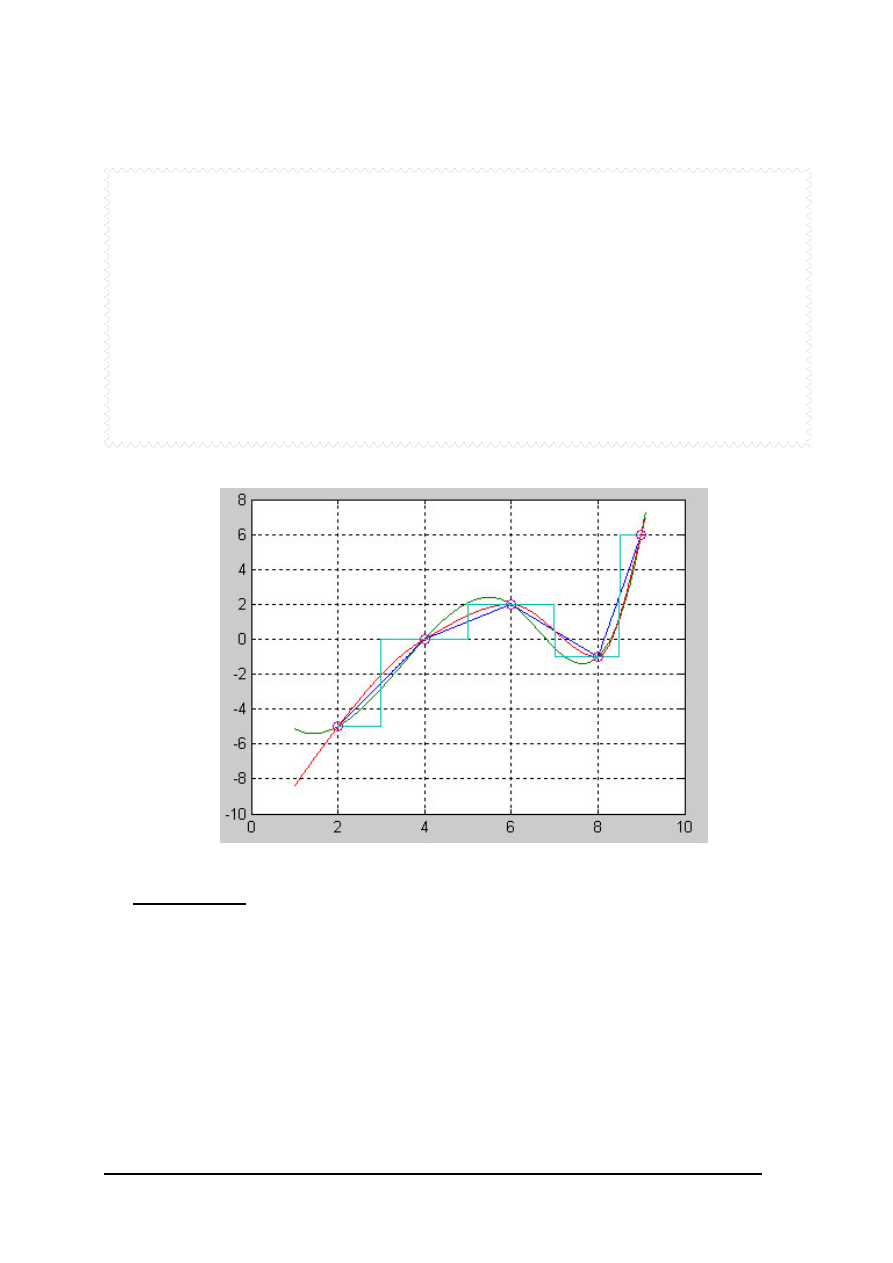
Kod:
xi=[ 2 4 6 8 9];
yi=[-5 0 2 -1 7];
plot(xi,yi,’o’),grid on,pause(2)
n=length(xi);
p=polyfit(xi,yi,n-1);
x=1:0.01:9.2;
y=polyval(p,x);
plot(xi,yi,’o’,x,y),grid on, pause(2)
pp=polyfit(xi,yi,8);
yy=polyval(pp,x);
plot(x1,yi,’o’,x,y,x,yy,’r’),grid on
axis([1 10 -10 12])
%dopasowanie osi wykresu
Interpolacyjne funkcje MATLABA
Matlab posiada rozbudowane funkcje interpolacyjne dedykowane do odpowiednich danych:
• Funkcje dla danych jednowymiarowych
interp1
• Funkcje dla danych dwuwymiarowych
inrerp2
• Funkcje dla danych wielowymiarowych
interp3, intern
Kod:
y=interp1(xi,yi,x,
’metoda’
)
%wykonuje interpolację w punktach określonych wektorami x dla zadanych węzłów (x
i
y
i
).
Elementy wektora
xi
muszą tworzyć ciąg rosnący.
metoda –
wybór metody interpolacji
linear
–
interpolacja funkcją łamaną
spline
–
interpolacja funkcjami sklejanymi
cubic
–
interpolacja wielomianami 3-go stopnia
nearest
– interpolacja wartościa najbliższych punktów
Przepisał: Blick © Materiały dostarczył: qWest © Pomagał: L3Vy ©
PWSZ Tarnów 2007
10
Laboratorium z metod numerycznych – Informatyka Stosowana I .
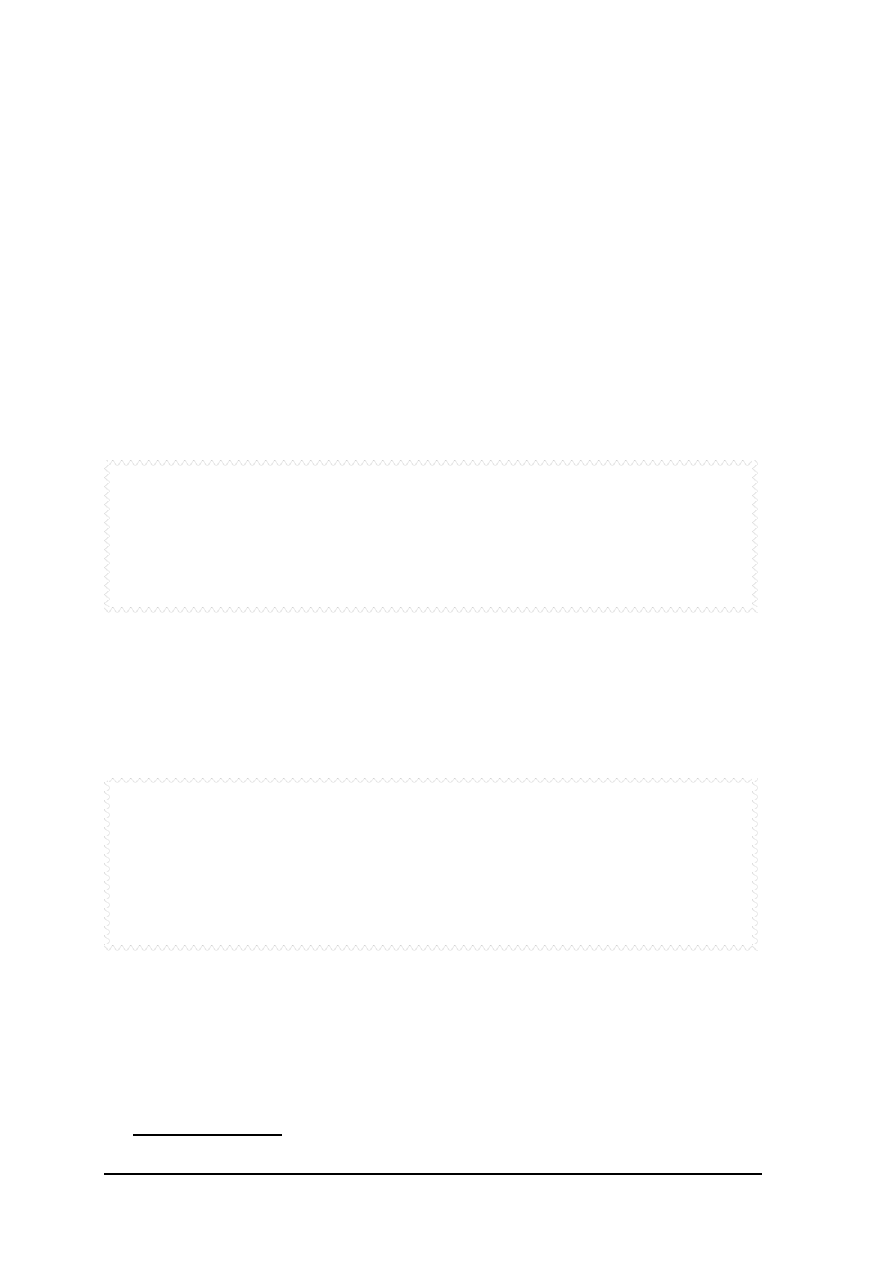
Kod:
xi=[ 2 4 6 8 9];
yi=[-5 0 2 -1 6];
plot(xi,yi,’o’),grid on, pause(2)
x=1:0.01:9.1;
y1=interp1(xi,yi,x,’linear’);
plot(x,y1,xi,yi,’o’),grid on, pause(2)
y2=interp1(xi,yi,’o’,’spline’);
plot(x,y2,xi,yi,’o’),grid on, pause(2)
y3=interp1(xi,yi,x,’cubic’);
plot(x,y3,xi,yi,’o’),grid on, pause(2)
y4=interp1(xi,yi,x,’nearest’);
plot(x,y4,xi,yi,’o’),grid on, pause(2)
plot(x,y1,x,y2,x,y3,x,y4,xi,yi,’o’)
Wynik:
3.3
Aproksymacja
Aproksymacja
Zadaniem znalezienie funkcji F(x) z żądaniem, aby jak najbardziej zbliżała się do funkcji f(x) w
pewnym określonym przedziale (a,b) nazywamy
A P R O K S Y M A C J Ą.
Kryterium Aproksymacj metodą najmniejszych kwadratów jest minimalizacja całki:
∫
−
=
b
a
dx
x
F
x
f
Q
2
))
(
)
(
(
Dla przypadku funkcji dyskretnej, minimalizacja sumy:
Przepisał: Blick © Materiały dostarczył: qWest © Pomagał: L3Vy ©
PWSZ Tarnów 2007
11
Laboratorium z metod numerycznych – Informatyka Stosowana I .
[
]
∑
=
−
=
a
i
i
i
x
F
y
Q
1
2
)
(
Wyznaczanie współczynników prostej regresji
(
)
(
)
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
⎟
⎠
⎞
⎜
⎝
⎛ −
⎟
⎠
⎞
⎜
⎝
⎛ −
∗
⎟
⎠
⎞
⎜
⎝
⎛ −
=
∗
−
∗
−
∗
=
=
∗
−
∗
+
⎟
⎠
⎞
⎜
⎝
⎛
−
=
∗
−
∗
⎟⎟
⎟
⎠
⎞
⎜⎜
⎜
⎝
⎛
∗
−
+
∗
−
=
−
=
=
⎟
⎠
⎞
⎜
⎝
⎛
−
∗
+
=
−
+
∗
=
∂
∂
=
∗
−
+
∗
=
∂
∂
−
+
∗
=
−
=
∆
=
−
=
∆
+
∗
=
=
n
i
i
n
i
i
i
n
i
n
i
i
i
n
i
i
i
n
i
i
n
i
i
i
n
i
i
n
i
n
i
i
i
n
i
i
n
i
i
n
i
i
i
n
i
i
n
i
i
n
i
n
i
n
i
i
i
i
i
i
n
i
i
i
n
i
n
i
i
i
i
n
i
i
i
i
i
x
x
y
y
x
x
a
x
x
x
x
y
y
x
a
y
x
x
y
x
x
x
a
y
x
x
x
a
y
x
a
x
a
y
b
x
n
a
y
n
b
y
b
n
x
a
y
b
x
a
b
b
a
Q
x
y
b
x
a
a
b
a
Q
y
b
x
a
y
y
y
b
a
Q
y
y
y
b
x
a
y
n
i
y
x
1
2
__
1
__
__
1
1
__
2
1
__
1
1
1
__
1
1
__
2
1
1
1
__
__
2
__
__
1
1
1
1
1
1
1
2
2
1
2
0
0
1
1
0
2
2
)
,
(
0
2
)
,
(
)
(
)
(
)
,
(
..
1
)
(
∑
=1
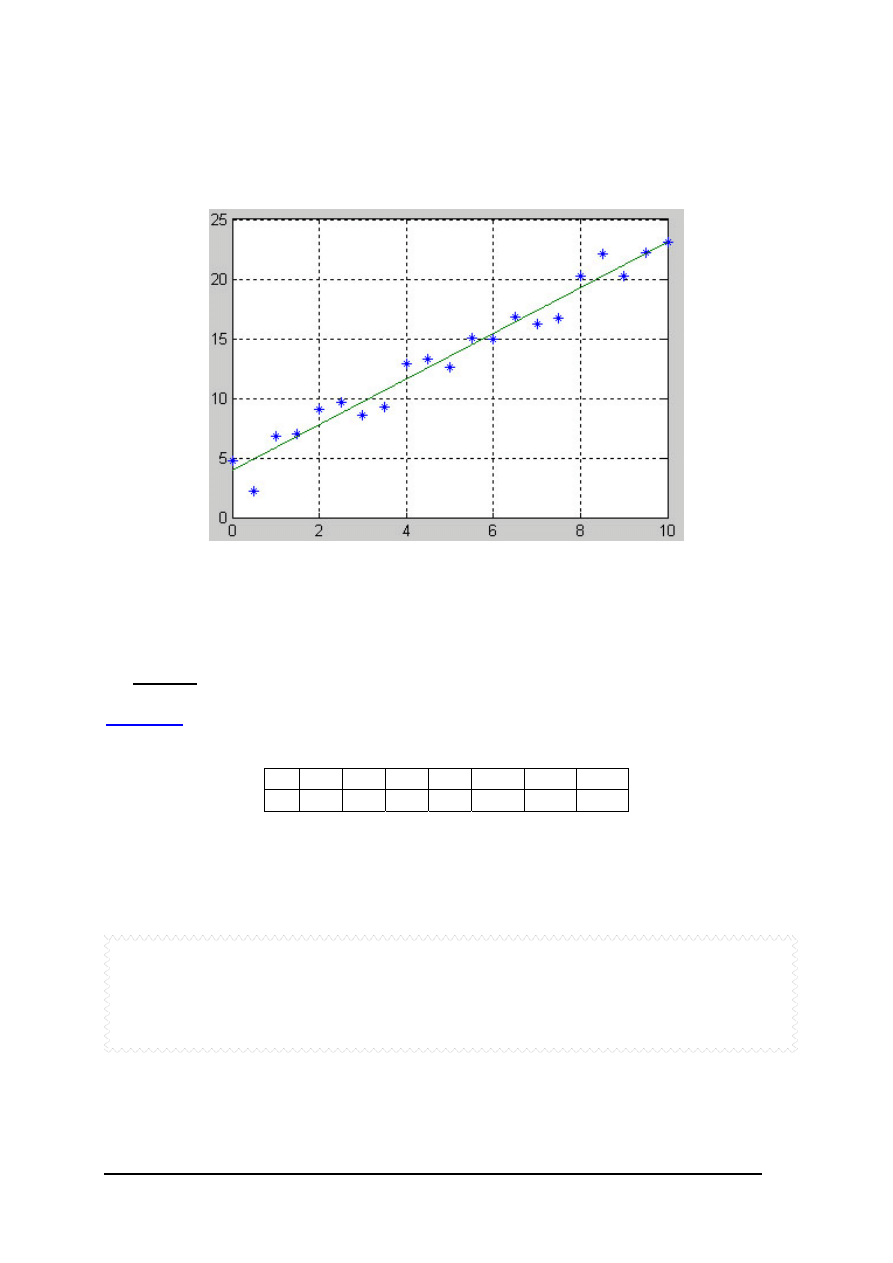
Kod:
xi=0:0.5:10;
n=length(xi);
y1=2*xi+3;
y2=3*(
rand
(1,n)-rand(1,n));
yi=y1+y2;
plot(xi,yi,’*’),pause(2)
xs=
sum
(xi)/n;
% wartość średnia x
ys=sum(yi)/n;
% wartość średnia y
a=(xi*yi’-n*xs*ys)/(xi*xi’-n*xs^2);
b=ys-a*xs;
x=0:0.01:10;
y=a*x+b;
plot(xi,yi,’*’,x,y),grid on
parametry_prostej=[a b]’
Przepisał: Blick © Materiały dostarczył: qWest © Pomagał: L3Vy ©
PWSZ Tarnów 2007
12
Laboratorium z metod numerycznych – Informatyka Stosowana I .
Wynik:
parametry_prostej =
1.9143
3.9445
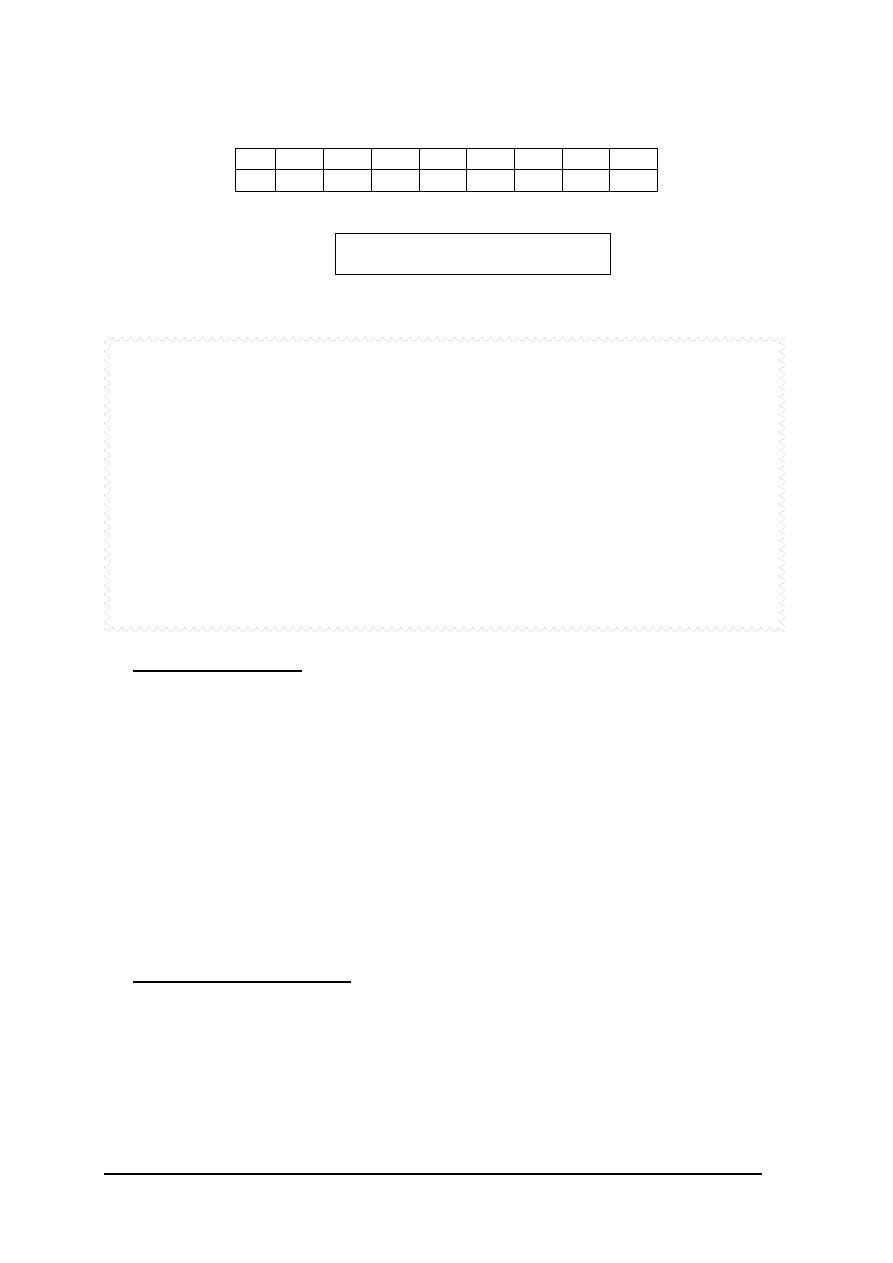
3.4 Zadania
Zadanie 1
Dokonano następujących pomiarów:
x
-5
-3
0 2 5 6 8
y 10 40 80 90 130 145 160
1. Wyznacz prostą regresji.
2. Oblicz y(1) i y(7).
Kod:
x=[ -5 -3 0 2 5 6 8];
y=[10 40 80 90 130 145 160];
c=polyfit(x,y,1)
y1_7=polyval(c,[1,7])
Wynik:
y= 11.2889x + 70.0444
y(1)= 81.3333
y(7)=149.0667
Przepisał: Blick © Materiały dostarczył: qWest © Pomagał: L3Vy ©
PWSZ Tarnów 2007
13
Laboratorium z metod numerycznych – Informatyka Stosowana I .
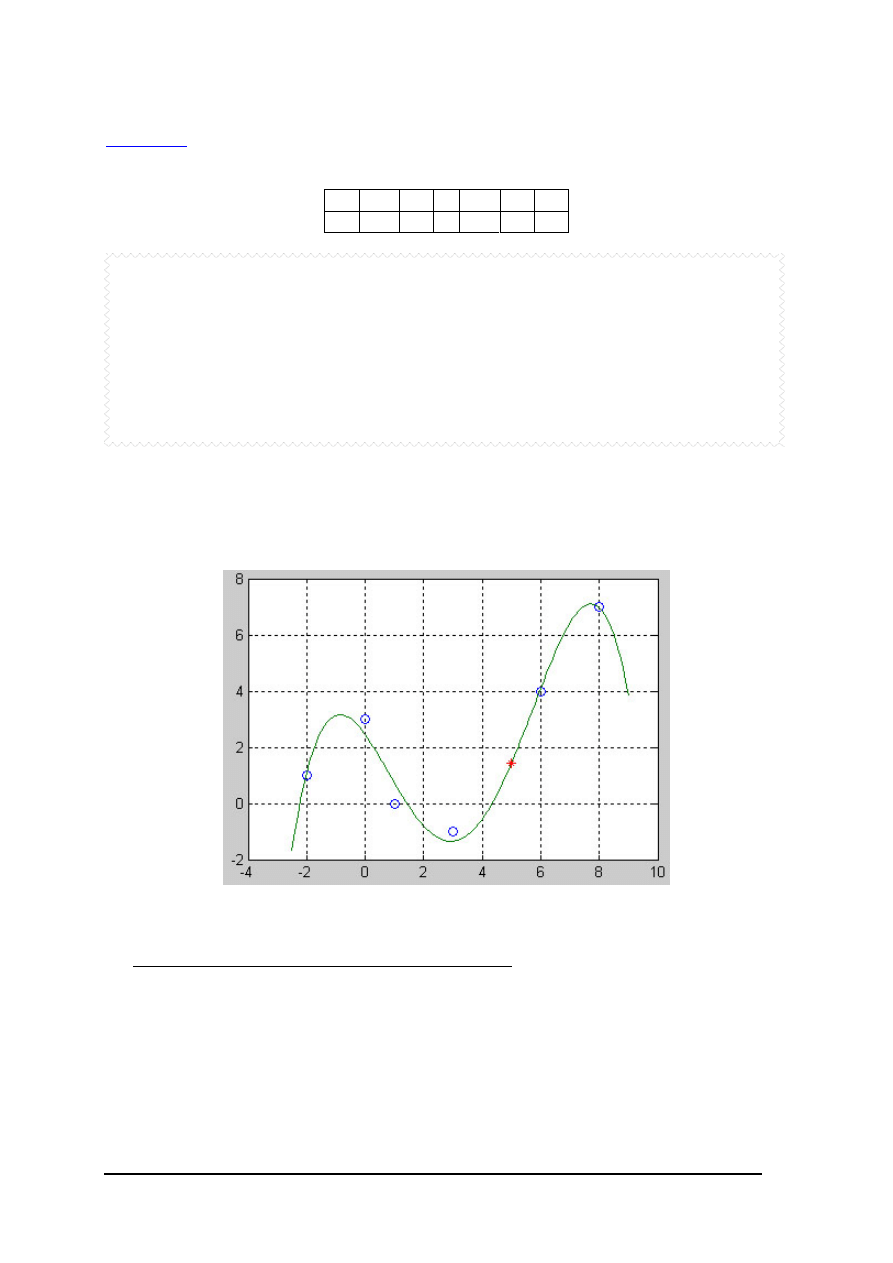
Zadanie 2.
Wyznacz współczynniki wielomianu 4 stopnia aporoksymującego punkty pomiarowe(x,y), a
następnie oblicz wartość y(5).
x -2 0 1
3 6 8
y 1 3 0
-1 4 7
Kod:
x=[-2 0 1 3 6 8];
y=[1 3 0 -1 4 7];
c=polyfit(x,y,4)
%wyznaczanie współczynników
y5=polyval(x,5)
%obliczanie y(5)
xx=-2.5:0.1:9;
yy=polyval(c,xx);
plot(x,y,’o’,xx,yy,5,y5,’*r’),grid on
Wynik:
c=
-0.0187 0.2.447 -0.5070 -1.4437 2.4623
y5= 1.4386
4.0 Przybliżone rozwiązywanie równań nieliniowych.
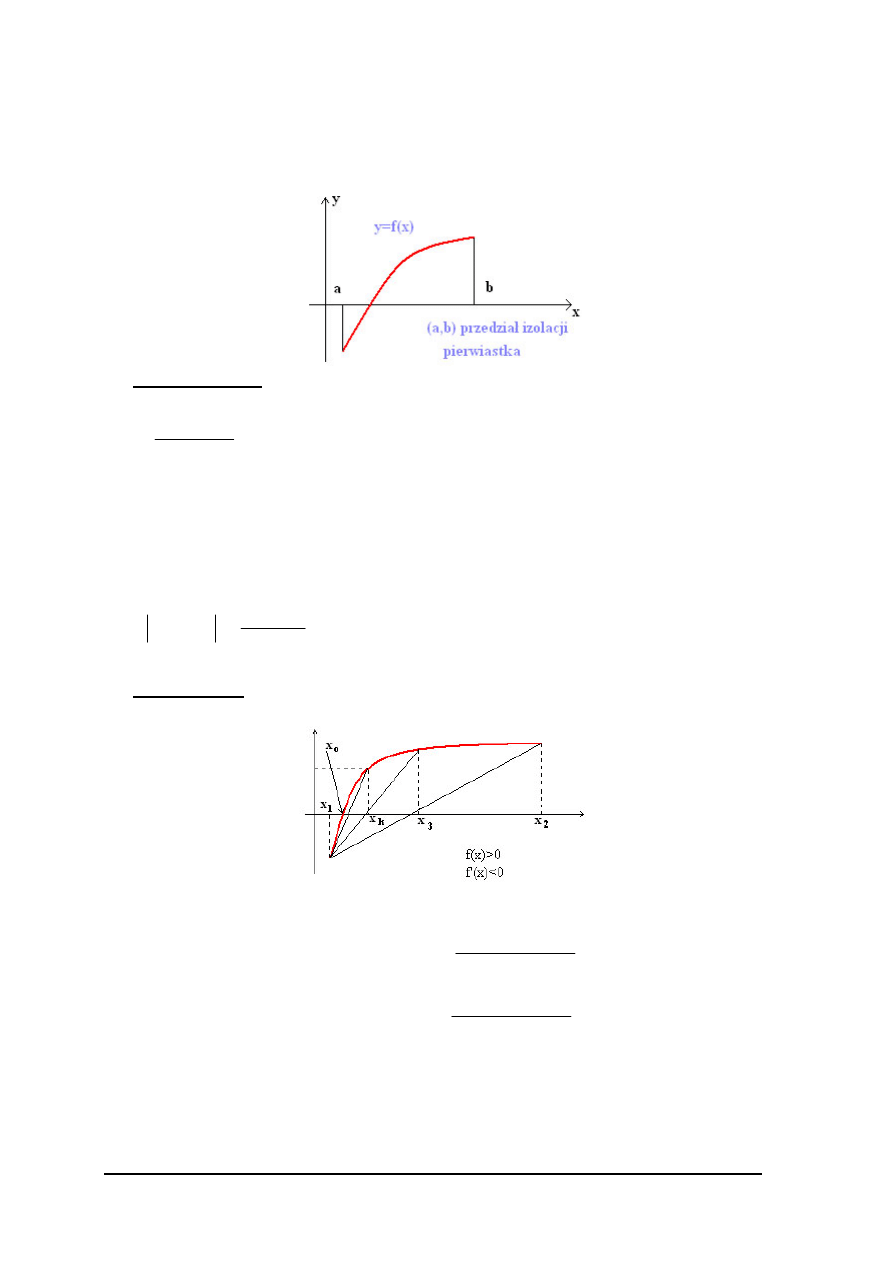
Twierdzenie Bolzano-Cauchy`ego
Jeżeli f(x) jest ciągła w przedziale [a,b] i f(a)•f(b)<0 to w przedziale (a,b) znajduje się co
najmniej jeden pierwiastek równania f(x)=0
Twierdzenie
Przepisał: Blick © Materiały dostarczył: qWest © Pomagał: L3Vy ©
PWSZ Tarnów 2007
14
Laboratorium z metod numerycznych – Informatyka Stosowana I .
Jeżeli w przedziale [a,b] spełnione są założenia tw. Bolzano-Cauchy`ego i dodatkowo
sgn(f’(x))=const
dla
x
∈
[a,b],
to przedział ten jest przedziałem izolacji pierwiastka
równania
f(x)=0
4.1
Metoda bisekcji:
0
)
(
)
(
3
2
3
2
1
1
2
1
<
∗
>
−
=
∨
−
=
+
=
−
−
x
f
x
f
k
k
j
k
j
x
x
x
k
k
k
Błąd metody:
k
k
x
x
x
x
2
1
2
0
−
<
−
=
δ
4.2
Metoda cięciw
)
(
)
(
)
(
)
(
)
(
)
(
1
1
1
1
1
1
1
1
x
f
x
f
x
x
x
f
x
x
x
f
x
f
x
x
x
f
x
x
k
k
k
k
k
k
k
−
−
−
=
−
−
−
=
+
+
Przepisał: Blick © Materiały dostarczył: qWest © Pomagał: L3Vy ©
PWSZ Tarnów 2007
15
Laboratorium z metod numerycznych – Informatyka Stosowana I .
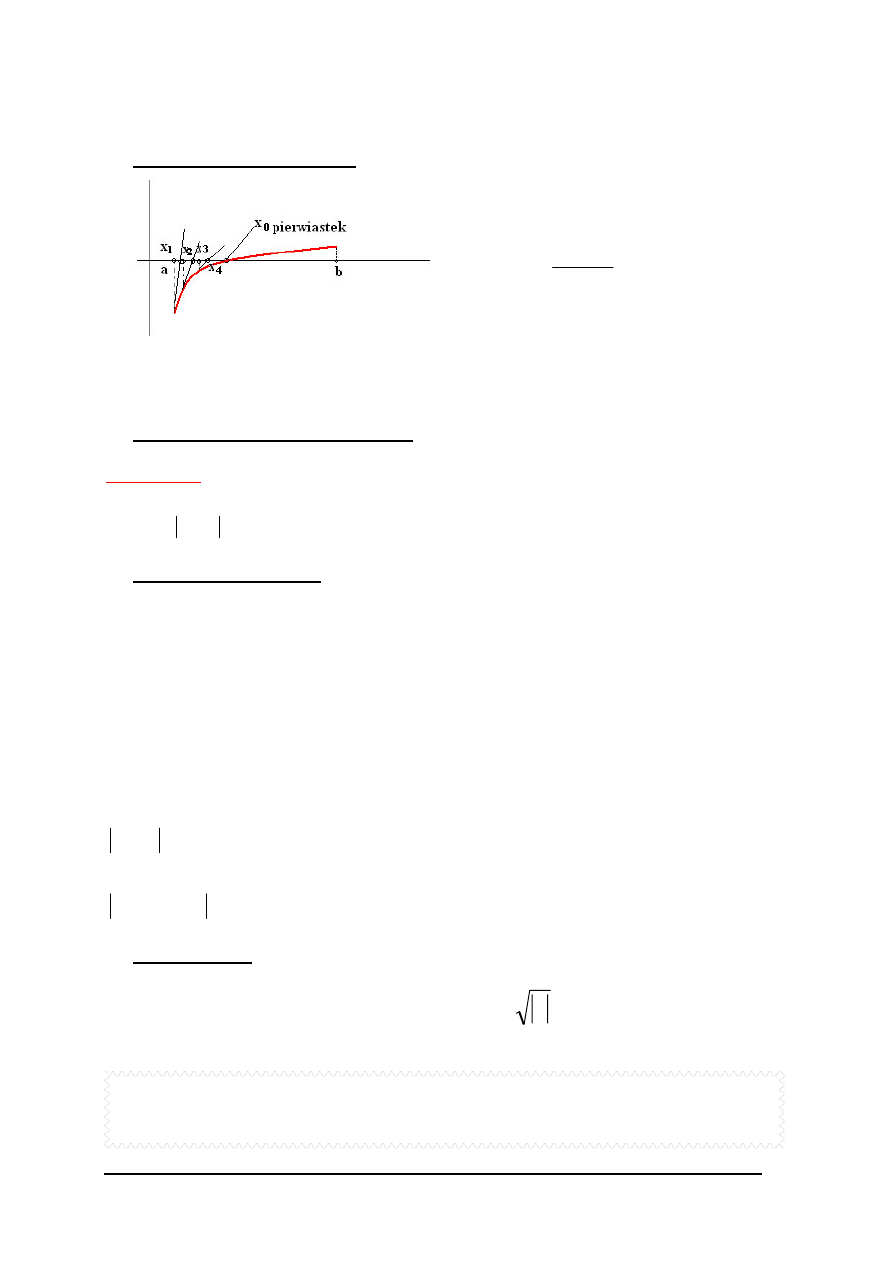
4.3
Metoda stycznych (Newtona)
b
x
x
f
x
f
a
x
x
f
x
f
k
k
k
k
=
→
<
∗
=
→
<
−
1
1
0
)
(
"
)
(
'
0
)
(
"
)
(
'
k
x
f
x
f
x
x
k
k
k
k
≥
−
=
+1
1
)
(
'
)
(
4.4
Metoda iteracji dla równania x=F(x)
Twierdzenie
Jeżeli w przedziale [a,b] izolacji pierwiastka równania x=F(x) pochodna funkcji F’(x) spelnia
warunek
1
)
(
'
<
≤ M
x
F
to proces iteracji jest zbieżny, przy czym x
0
∈
[a,b].
4.5 Wyprowadzanie metody
)
(
)
(
)
(
)
(
)
(
0
)
(
0
)
(
1
k
k
x
F
x
x
F
x
x
x
f
a
x
F
x
x
x
f
a
x
f
a
x
f
=
=
+
∗
=
=
+
∗
=
∗
=
+
Warunki zapewniające zbieżność
a
x
f
a
x
f
a
x
F
x
F
→
<
+
∗
+
∗
=
<
1
1
)
(
1
)
(
)
(
1
)
(
'
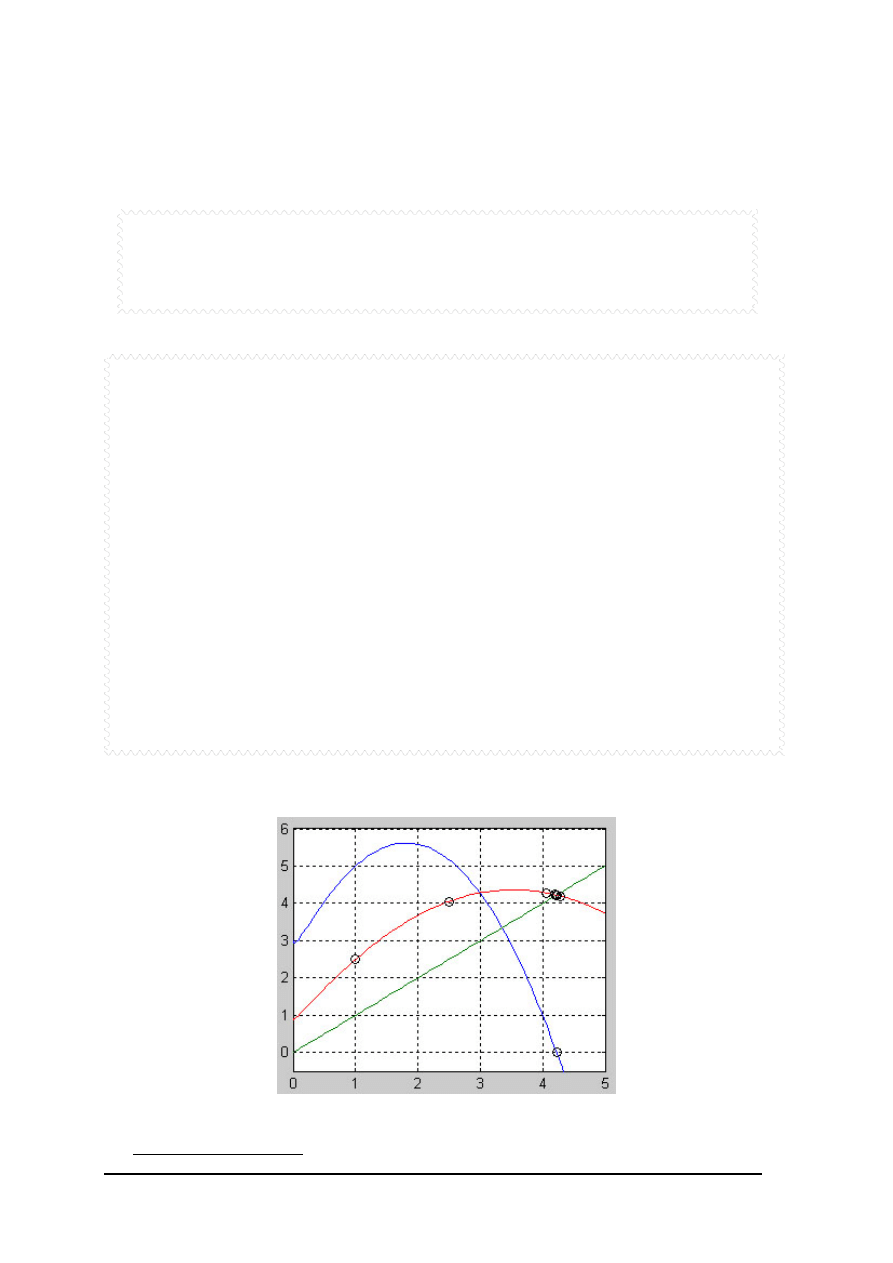
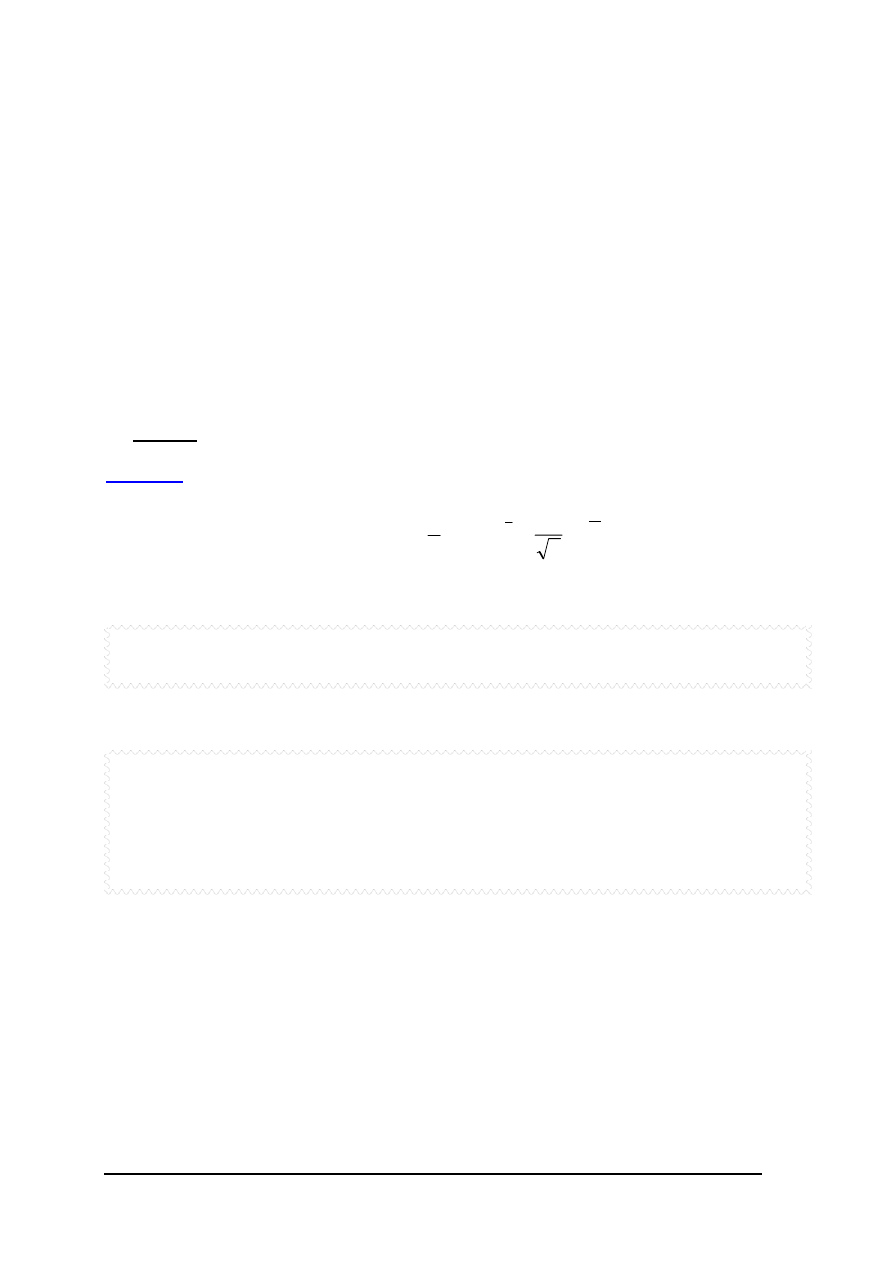
4.6 Metoda iteracji
x
x
x
y
−
+
+
−
=
3
4
2
Kod:
Plik funkcyjny f7.m: [f(x)]
function y=f7(x)
y=-x.^2+4*x+3-sqrt(abs(x));
Przepisał: Blick © Materiały dostarczył: qWest © Pomagał: L3Vy ©
PWSZ Tarnów 2007
16
Laboratorium z metod numerycznych – Informatyka Stosowana I .
Plik fukncyjny f8.m: [F(x)]
function y=f8(x)
global a
Y=a*f7(x)+x;
Plik skryptowy:
clear all,clc,clf
global a
a=0.3;
fplot('[f7(x),x,f8(x)]',[0 5 -0.5 6])
grid on
hold on
x(1)=1;
b=1;
k=1;
while b>0.001
x(k+1)=f8(x(k));
b=abs(f7(x(k+1)));
k=k+1;
if k>10, break, end
end
n=length(x);
zo=x(n)
plot(zo,0,'ok',x,f8(x),'ok')
Wynik:
4.7
Polecenia MATLABA
Przepisał: Blick © Materiały dostarczył: qWest © Pomagał: L3Vy ©
PWSZ Tarnów 2007
17
Laboratorium z metod numerycznych – Informatyka Stosowana I .
xo = fzero(‘
plik_funkcyjny’
,
x
0
)
% oblicza miejsce zerowe funkcji podanej w m-
pliku_funkcjnym
%
x
0
punkt startowy
r=roots(p)
% oblicza pierwiastki wielomianu o współczynnikach zadanych wektorem p
fplot(‘
plik_funkcyjny’
,limits)
% wykreśla funkcję podana w m-
pliku_funkcyjnym
w przedziale określonym przez
limits
limits
jest wektorem określającym oś x
– [ x
min
x
max
],
lub osie x i y –
[x
min
x
max
y
min
y
max
].
4.8
Zadania
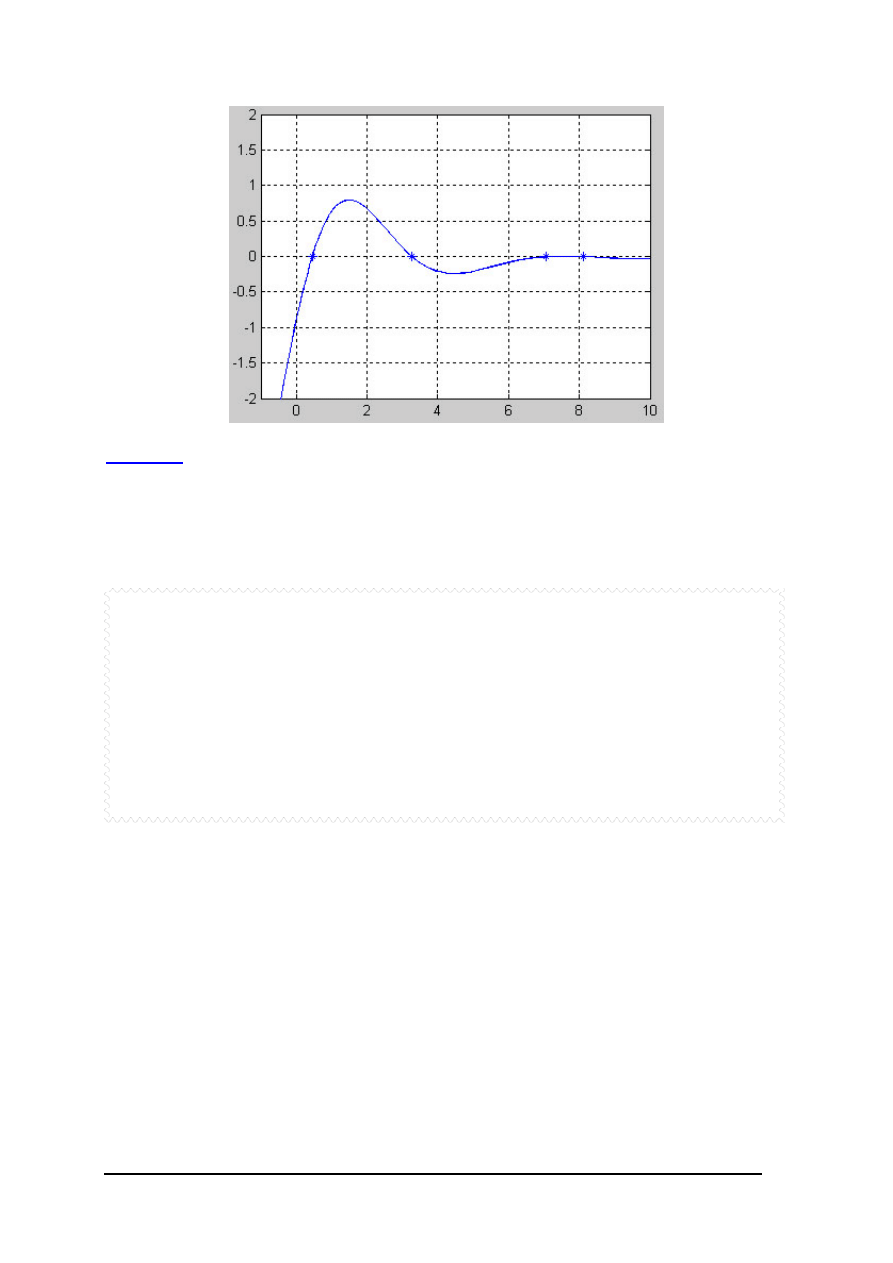
Zadanie 1
Wyznacz miejsca zerowe funkcji f(x)=0 w przedziale [0,9]
10
2
7
2
.
0
2
3
cos
2
)
(
x
x
e
e
x
x
f
∗
+
∗
⎟
⎠
⎞
⎜
⎝
⎛
−
∗
=
π
Kod:
Plik funkcyjny:
function t=fun2(x)
y=2*cos(pi*x/3-2).*exp(-x/2)-0.2/sqrt(7).*exp(-x/10);
Plik skryptowy:
fplot(‘fun2’,[-1 10 -2 2]), hold on
p1=fzero(‘fun2’,2);
p2=fzero(‘fun2’,6);
p3=fzero(‘fun2’,8);
p=[p1 p2 p3]’
plot(p,zeros(size(p)),’ok’), grid on
Wynik:
Przepisał: Blick © Materiały dostarczył: qWest © Pomagał: L3Vy ©
PWSZ Tarnów 2007
18
Laboratorium z metod numerycznych – Informatyka Stosowana I .
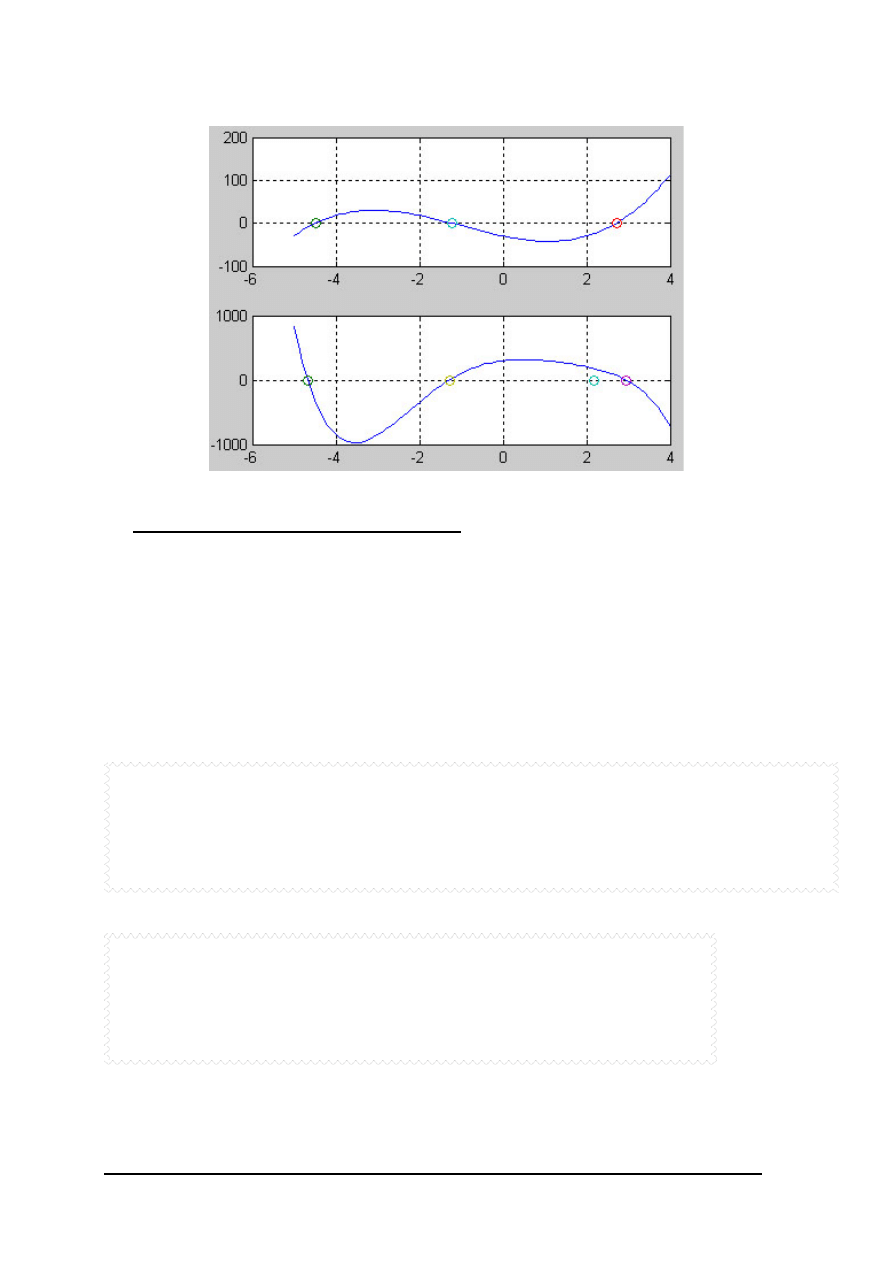
Zadanie 2
Znaleźć pierwiastki wielomianów:
a) p1(x)=2x
3
+6x
2
-20x-30
b) p2(x)=-1.5x
5
+2x
4
+20x
3
-100x
2
+80x+300
Kod:
p1=[2 6 -20 -30];
p2=[-1.5 2 20 -100 80 300];
r1=roots(p1)
r2=roots(p2)
x=-5:0.1:4;
y1=polyval(p1,x);
y2=polyval(p2,x);
subplot(2,1,1),plot(x,y1,r1,0,'o'), grid
subplot(2,1,2),plot(x,y2,r2,0,'o'), grid
Wynik:
Przepisał: Blick © Materiały dostarczył: qWest © Pomagał: L3Vy ©
PWSZ Tarnów 2007
19
Laboratorium z metod numerycznych – Informatyka Stosowana I .
5.0 Całkowanie i różniczkowanie numeryczne.
Dy=diff(y) %zwraca wektor różnic sąsiednich elementów wektora y
1
1
]
[
],
[
1
1
2
1
3
2
1
=
=
−
=
∆
∆
∆
∆
=
=
+
−
n
k
dla
y
y
y
y
y
y
Dy
y
y
y
y
y
k
k
k
n
n
K
K
K
Kod
x=0:0.1:7;
y=sin(x);
n=length(x)
yprim=diff(y)./fidd(x);
%pochodna
pot(x,y,x(1:n-1),yprim), grid
Kod f1.m
fumction y=f1(x)
y=2*x+5*cos(3*x).*exp(-x/2);
Kod
Przepisał: Blick © Materiały dostarczył: qWest © Pomagał: L3Vy ©
PWSZ Tarnów 2007
20
Laboratorium z metod numerycznych – Informatyka Stosowana I .
x=0:0.1:7;
y=f1(x);
n=length(x)
yprim=diff(y)./diff(x);
%pochodna
plot(x,y,x(1:n-1),yprim),grid
legend(‘funkcja’,’pochodna’);
5.1 Polecenia Matlaba
Dla wielomianów
P=[1 4 7 0 3 1 6]
P1=polyder(P)
Dla funkcji wymiernej
L=[-2 0 4 0 20 0]
M=[ 1 0 4 …]
[L1,M1]=polyder(L,M)
5.2 Przykłady
Wykreślić funkcję i jej pochodną dla x z przedziały -4 do 4
8
2
1
)
(
2
5
3
+
+
−
=
x
x
x
x
W
Rozwiązanie
h=0.05;
x=-4:h:4;
L=[1 0 -1];M=[1 0 2 0 8];
[L1,M1]=polder(L,M)
y=polyvel(L,x)./polyval(M,x);
yprim=polyval(L1,x)./polyval(M1,x);
plot(x,y,x,yprim,’-‘),grid
title(‘Funkcja wymierna i jej pochodna’)
legend(‘funkcja’,’pochodna’)
5.3
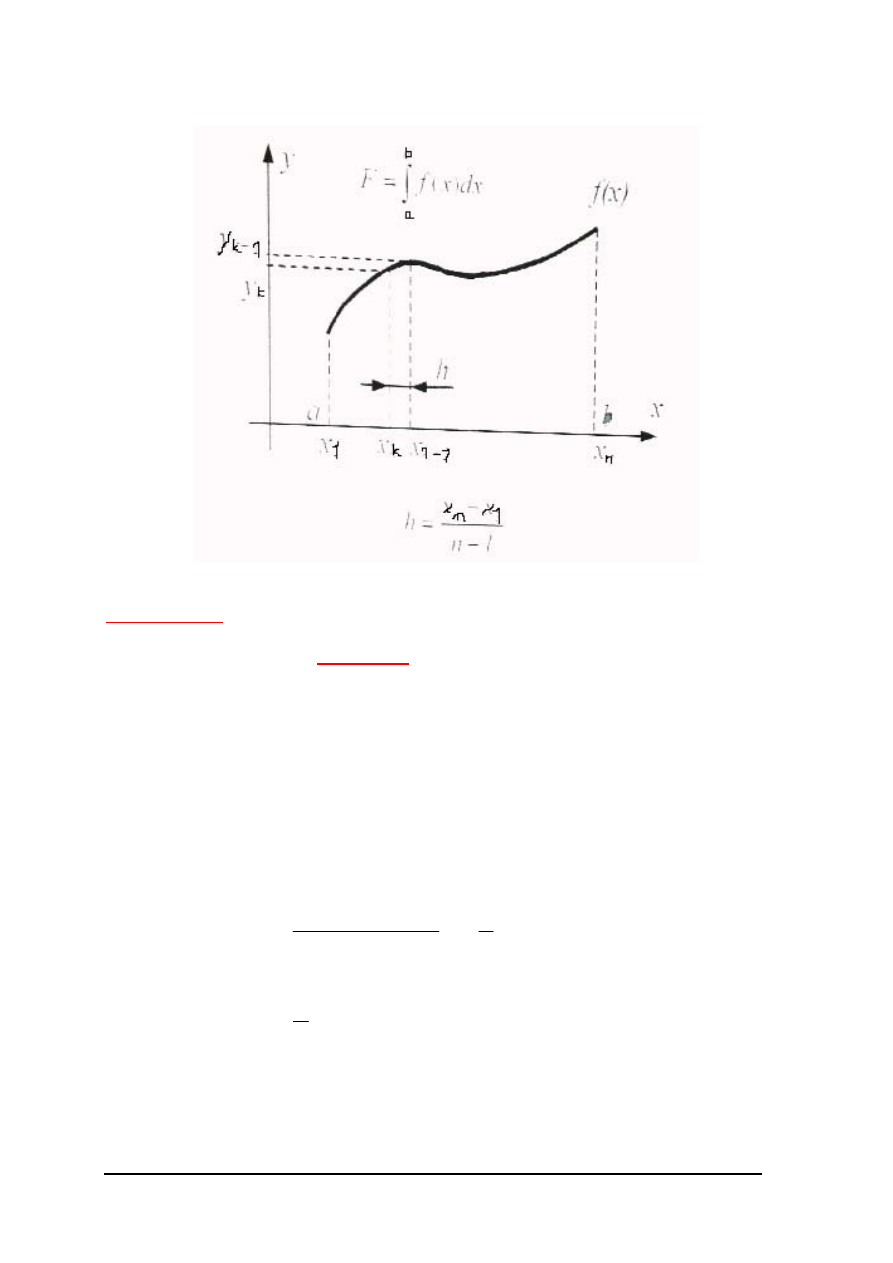
Całkowanie numeryczne
Przepisał: Blick © Materiały dostarczył: qWest © Pomagał: L3Vy ©
PWSZ Tarnów 2007
21
Laboratorium z metod numerycznych – Informatyka Stosowana I .
Wzory do numerycznego całkowania funkcji jednej zmiennej nazywane są
kwadraturami.
Funkcji wielu zmiennych –
kubaturami
Kwadratury interpolacyjne i aproksymacyjne:
Kwadratury Newtona-Cotesa
Kwadratury Gaussa
Kwadratury Lobatto
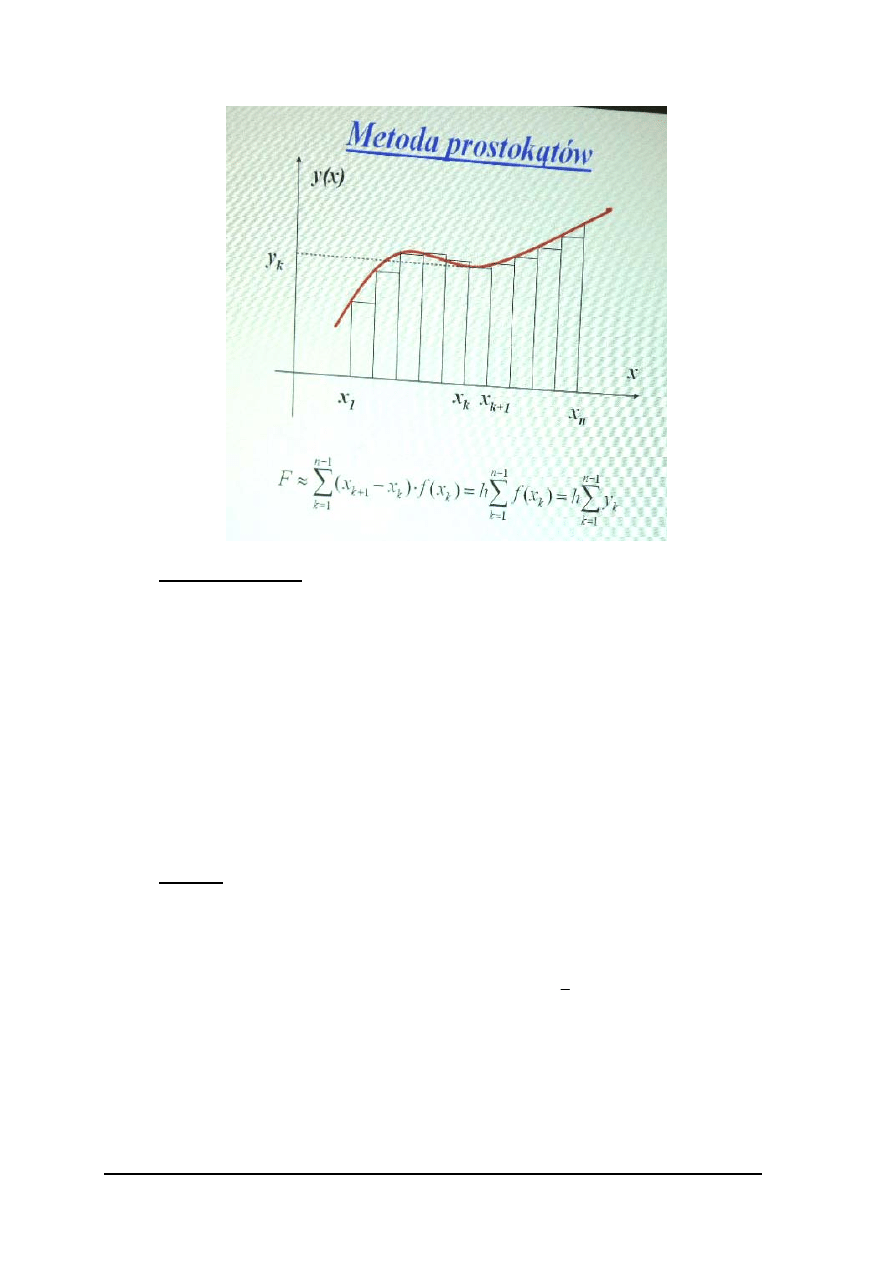
Metoda prostokątów
∑
∑
−
=
−
=
=
≈
1
1
1
1
)
(
n
k
n
k
k
k
y
h
x
f
h
F
Metoda trapezów
∑
∑
−
=
−
=
+
⎟
⎠
⎞
⎜
⎝
⎛
+
+
=
+
≈
1
1
1
2
1
1
2
2
2
)
(
)
(
n
k
n
k
n
k
k
k
y
y
y
h
h
x
f
x
f
F
Metoda parabol
)
)
(
)
(
4
)
(
(
3
2
/
1
1
2
2
1
2
∑
=
+
−
+
+
≈
n
k
k
k
k
x
f
x
f
x
f
h
F
Metoda Prostokątów
Przepisał: Blick © Materiały dostarczył: qWest © Pomagał: L3Vy ©
PWSZ Tarnów 2007
22
Laboratorium z metod numerycznych – Informatyka Stosowana I .
5.4
Polecenia Matlaba
∫
=
h
a
dx
x
f
F
)
(
F=quad(‘funk
% Simpson`s
cja’,a,b)
F=quad8(funkcja’a,b)
%Newton-Cotes(dawna)
felp quad
Quadv, quadl, dblquad, triplequad
5.5
Zadania
Oblicz całkę oznaczoną z funkcji f(x) w granicach a=1 b=10 metodą prostokątów,
trapezów I wbudowaną Matlaka
2
*
)
3
cos(
5
2
)
(
x
e
x
x
x
f
+
=
Przepisał: Blick © Materiały dostarczył: qWest © Pomagał: L3Vy ©
PWSZ Tarnów 2007
23
Laboratorium z metod numerycznych – Informatyka Stosowana I .
Rozwiązanie
h=0.01;
x=1:h:10;
n=length(x)
fplot(‘f1’,[1 10]), grid
y=f1(x);
a=x(1);
b=x(n);
F(1)=h*sum(y(1:n-1));
%prostokątów
F(2)=h*(y(1)+2*sum(y(2:n-1))+y(n))/2;
%trapezów
F(3)=quad(‘f1’,a,b);
%Simpson`s
Wynik=F’
Oblicz całkę metodą prostokątów, trapezów i wbudowaną w Matlaba oraz wyznacz błąd
obliczeń numerycznych
∫
=
π
0
)
sin( dx
x
F
Rozwiązanie
h=0.1;
x=0:h:pi;
n=length(x)
fplot(‘sin’,[0 3*pi]), grid
y=sin(x);
a=x(1);
b=x(n);
format short
F1=h*sum(y:n-1));
%prostokątów
F2=h*(y(1)+2*sum(y(2:n-1))+y(n))/2;
%trapezów
F3=quad(‘sin’,a,b);
%Simpson`s
Wynik=[F1,F2,F3]’
Blad=2-Wynik
Wynik obliczeń
Wyniki=
∫
=
=
π
0
2
)
sin( dx
x
F
1,9954
1,9975
1,9991
Przepisał: Blick © Materiały dostarczył: qWest © Pomagał: L3Vy ©
PWSZ Tarnów 2007
24
Laboratorium z metod numerycznych – Informatyka Stosowana I .
Błąd=
0,0046
metoda prostokątów
0,0025
metoda trapezów
0,0009
metoda Matlab
Oblicz pole figury leżącej w II-cwiartce układu współrzędnych ograniczonej wielomianem
W(x)=-x
4
+3x+4 oraz osiami OX i OY. Podaj pierwiastki wielomianu W(x), naszkicuj
wykres W(x) dla x z przedziału [-1.5 2]
Rozwiązanie
f2-inline(‘-x.^4+3*x+4’,’x’)
fplot(f2,[-1.5 2]), grid on
p2=[-1 0 0 3 4]
r2=roots(p2)
F2=quad(f2,r2(4),0)
z1=fzero(f2,-1);
z2=fzero(f2,2);
z=[z1;z2];
6.0 Równania różniczkowe zwyczajne (ordinary Differentia Equation ODE)
Równanie n-tego rzędu
(
)
)
1
(
)
2
(
)
1
(
)
(
,...
,
,
,
)
(
−
=
n
n
x
x
x
x
t
f
t
x
Równanie pierwszego rzędu
)
,
(
'
)
(
)
1
(
x
t
f
x
t
x
=
=
• Zagadnienia brzegowe (Boundary Valne Problem BVP)
• Równania różniczkowe cząstkowe (Partial Differentia Equation PDE)
6.1 Metody numeryczne
Numeryczne rozwiązywanie układów równań różniczkowych polega na poszukiwaniu
rozwiązania, startując z punktu, w którym jest ono znane (warunek początkowy). Jeśli znamy
rozwiązanie w punktach t
1
do t
k
to dla kolejnego t
k+1
wyznaczamy y(t
k+1
) stosując odpowiednią
aproksymację.
Prosta metoda Eulera
)
,
(
)
(
)
,
(
1
1
y
x
f
dx
x
dy
y
x
f
x
y
k
k
k
k
=
=
∆
∆
+
+
Przepisał: Blick © Materiały dostarczył: qWest © Pomagał: L3Vy ©
PWSZ Tarnów 2007
25
Laboratorium z metod numerycznych – Informatyka Stosowana I .
x
y
x
F
y
y
y
y
const
h
x
x
x
x
y
x
y
y
y
y
k
k
k
k
k
k
k
k
k
k
∆
+
=
=
=
=
∆
=
−
=
∆
=
−
=
∆
+
+
+
+
+
*
)
,
(
)
(
1
0
1
1
1
0
0
1
1
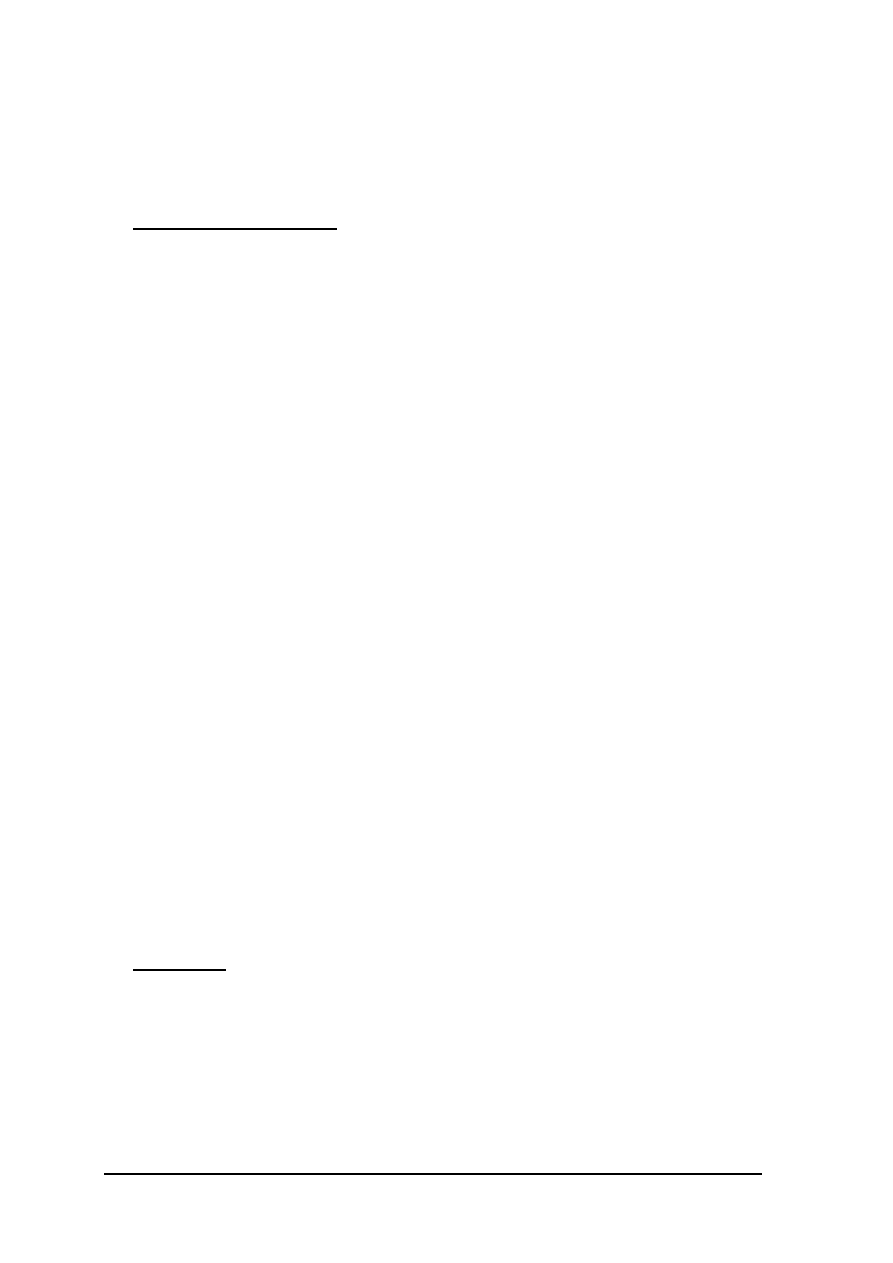
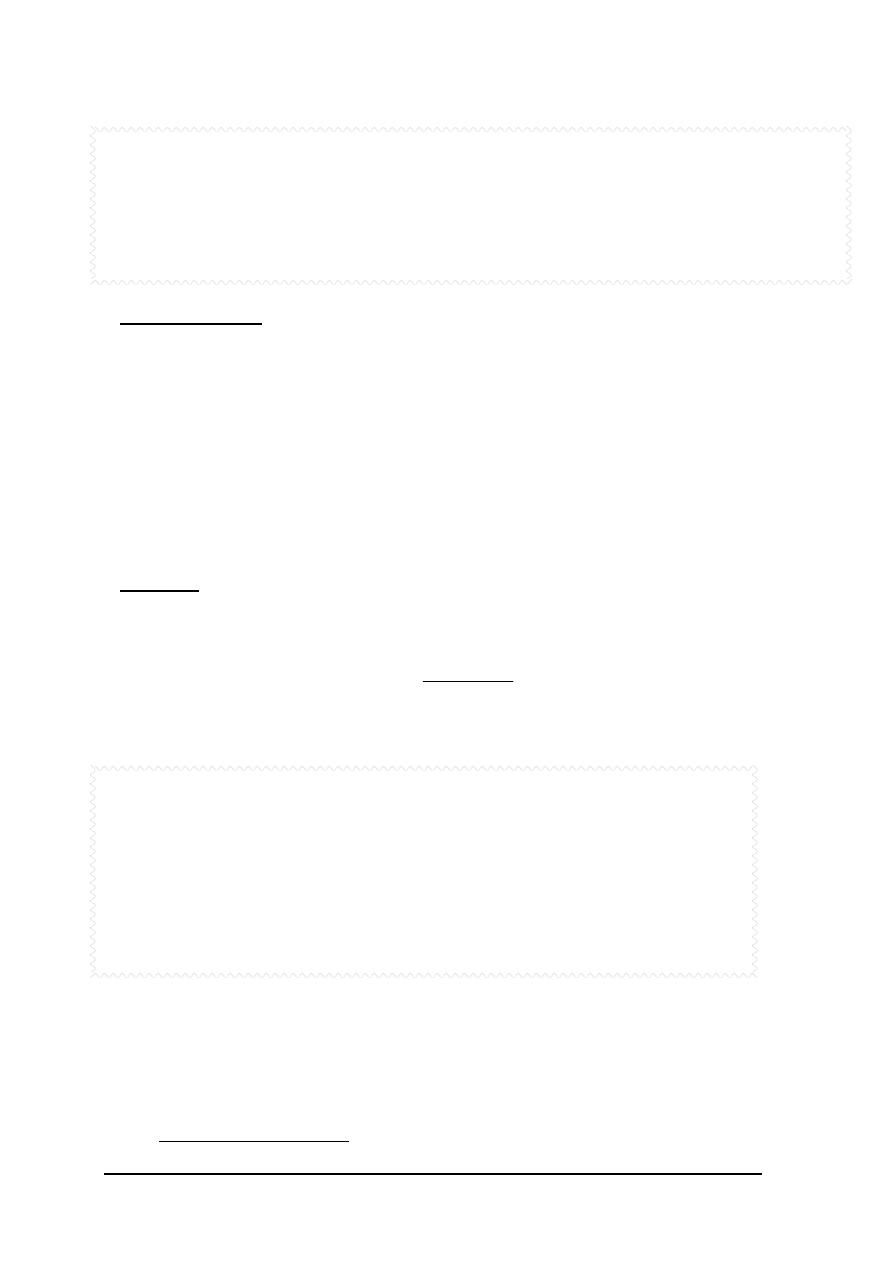
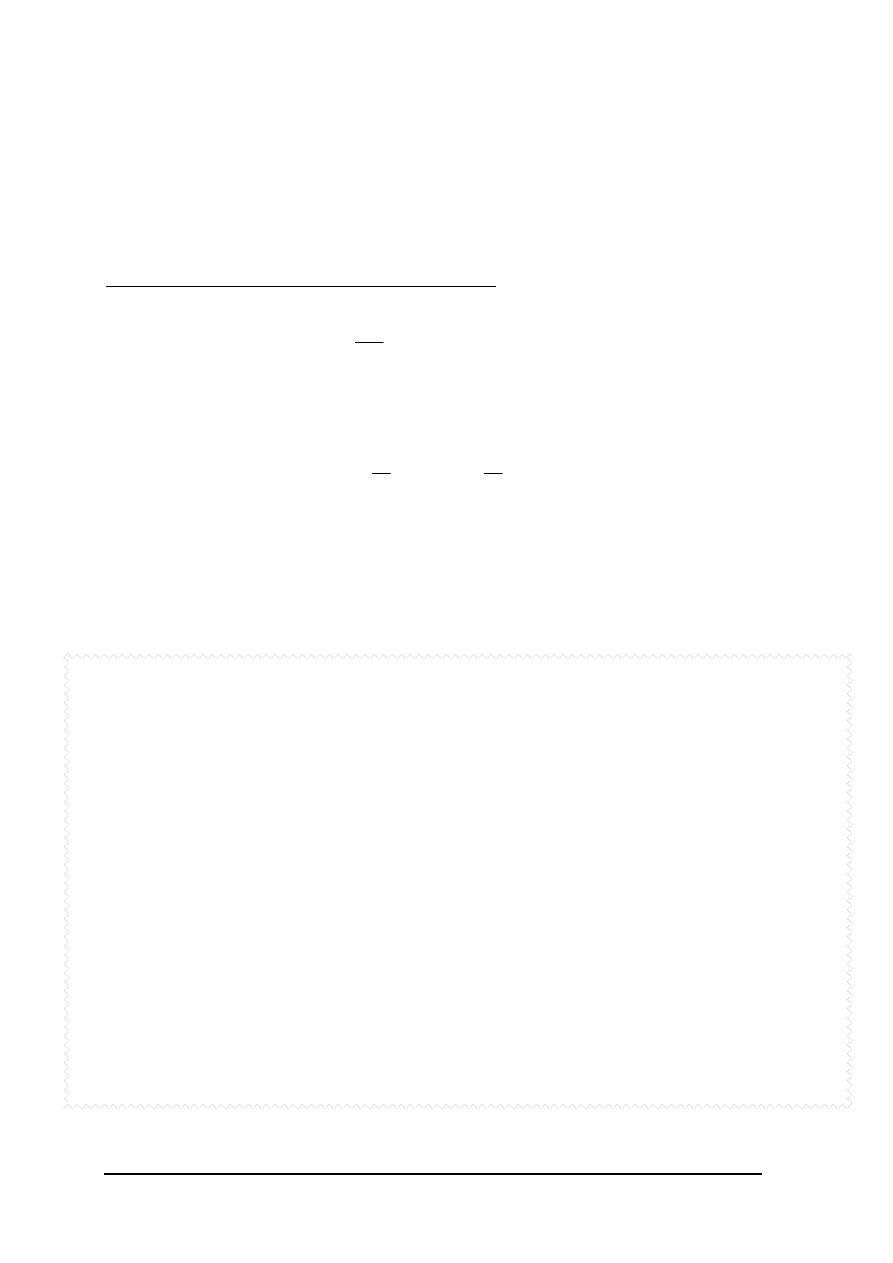
6.2 Rozwiązać numerycznie równanie w przedziale 0,3
b
y
a
dx
dy
+
−
=
*
Rozwiązanie analityczne
ax
e
a
b
y
a
b
x
y
−
−
+
=
*
)
(
)
(
0
Dane:
a=2, b=6, y(0)=y
0
=-1
Kod:
clear all, clf
f=inline(‘-2*y+6’,’x’,’y’);
x(1)=0;
% xo
y(1)=-1;
% yo
xk=3;
dx=0.01;
%krok
n=floor((xk-x(1))/dx);
%zaokraglenie
for k=1:n
y(k+1)=y(k)+f(x(k),y(k))*dx;
x(k+1)=x(k)+dx;
end
x1=min(x);x(2)=max(x);y1=min(y);y2=max(y);m=0.2;
yd=3+exp(-2*x)*(-3+y(1));
% rozw. dokładne
b=(y-yd)/(y2-y1)*100;
% blad w procentach
b1=min(b);b3=max(b);
subplot(2,1,1)
plot(x,y,x,yd),grid on, title(‘rozwiazania’)
axis([x1 x2 y1-m y2+m])
subplot(2,1,2)
plot(x,b),grid on,title(‘blad wzgledny w %’)
axis([x1 x2 b1-m b2+m])
Przepisał: Blick © Materiały dostarczył: qWest © Pomagał: L3Vy ©
PWSZ Tarnów 2007
26
Laboratorium z metod numerycznych – Informatyka Stosowana I .
Wynik:
6.3
Funkcje ODE w Matlabie
[T,Y] = odexx(‘F’, przedzial, y0)
xx – liczba okreslajaca metode
powyższa instrukcja całkuje układ równań różniczkowych postacy y
n
=F(t,y)
w przedzale od
t_pocz
do
t-koniec
przedzial
= [
t_pocz t_koniec
]
z warunkami początkowymi podanymi w wektorze y0
‘F’ jest nazwą ODE pliku funkcyjnego.
Function
F(t,y) musi zawracać kolumnowy wektor.
[T Y] Każdy wiersz w macierzy rozwiązania Y odpowiada argumentowi t zwracanemu w
kolumnowym wektorze T.
Układy równań dobrze uwarunkowanych
ode45 - Runie-Kutta rzędu (4,5)
ode23 - Runie-Kutta rzędu (2,3)
ode113 – Adams-Bashforth-Moulton
Układy równań źle uwarunkowanych (sztywnych)
ode15s - Gear`s
ode23s - Rosenbrock
ode23t - trapez
ode23tb
Przepisał: Blick © Materiały dostarczył: qWest © Pomagał: L3Vy ©
PWSZ Tarnów 2007
27

Laboratorium z metod numerycznych – Informatyka Stosowana I .
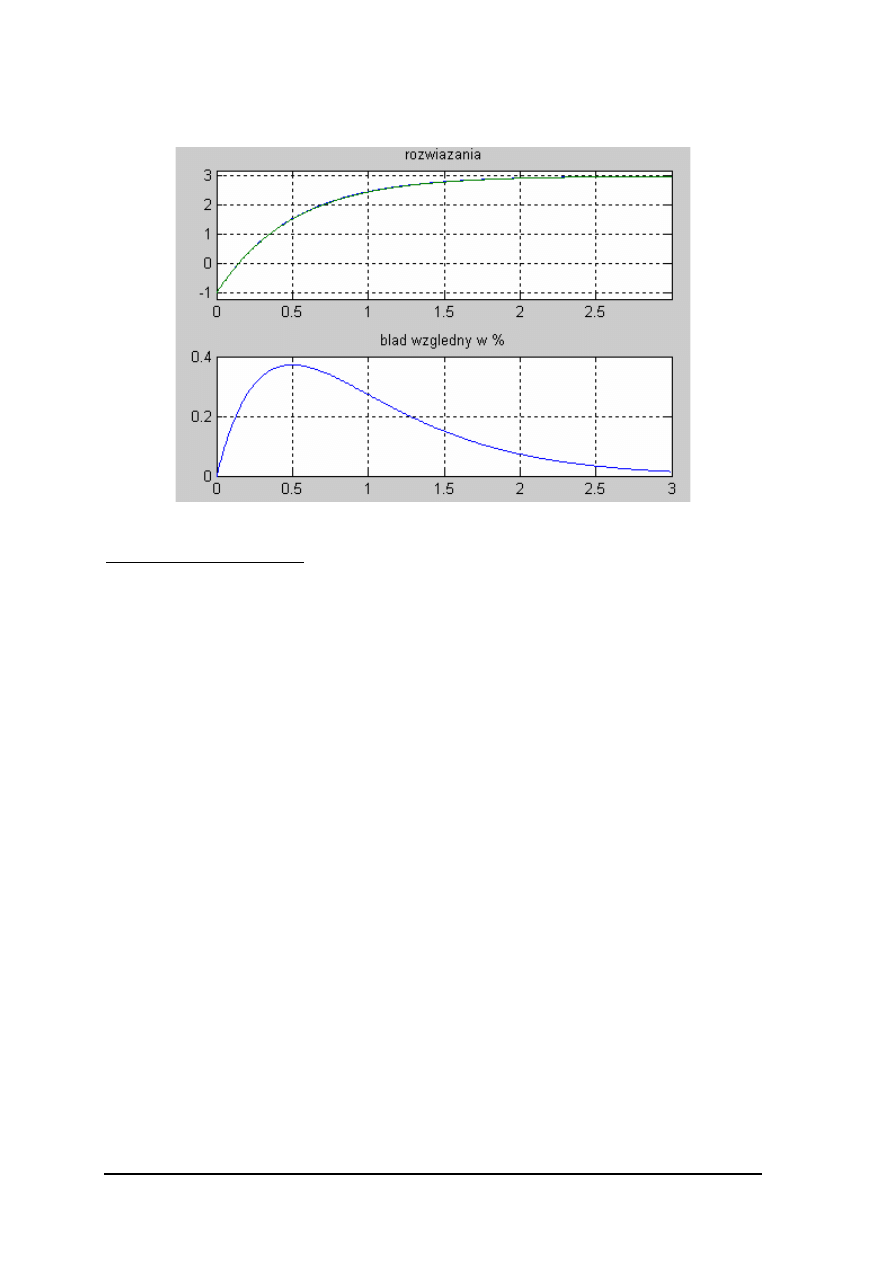
Przykład:
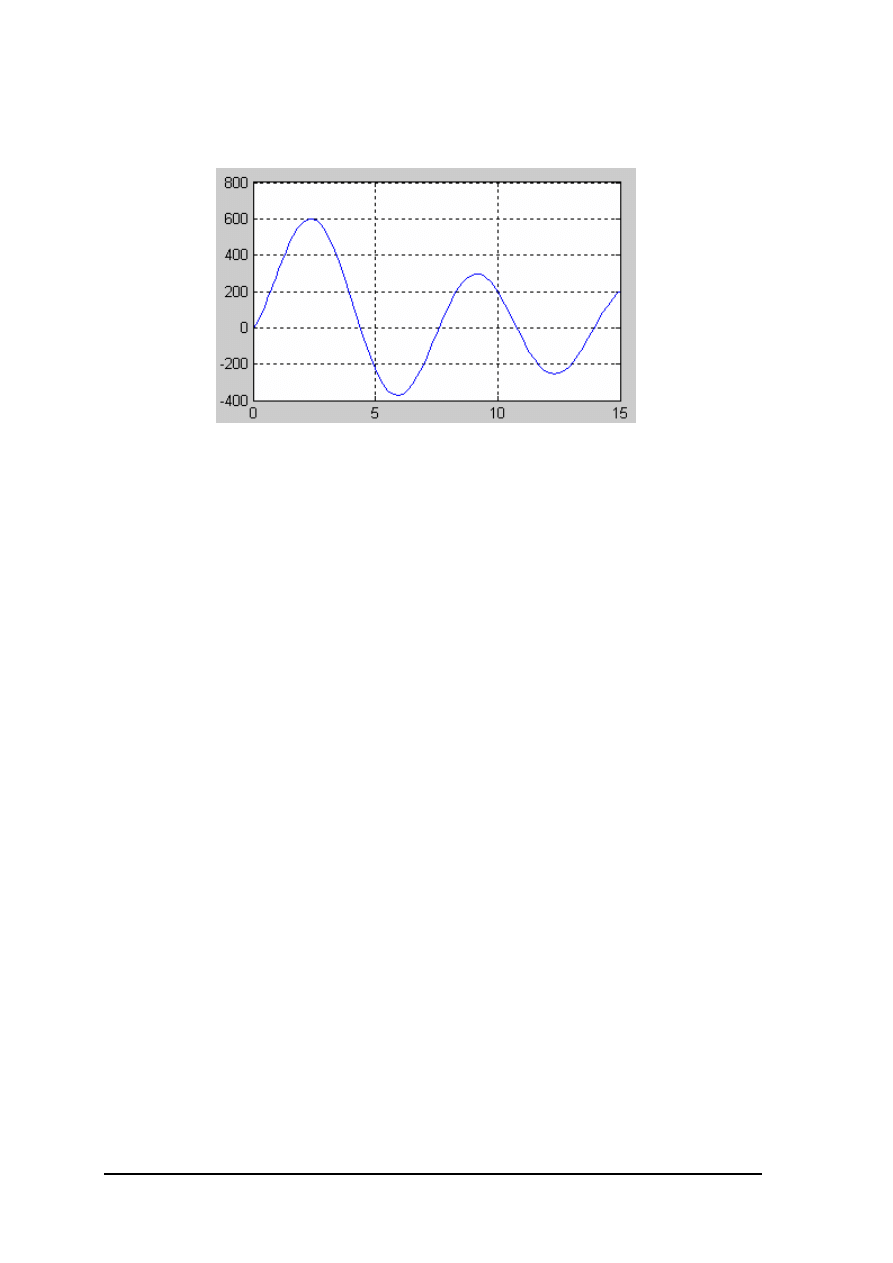
Rozwiązać numerycznie układ równań różniczkowych
0
)
0
(
5
.
0
1
)
0
(
2
2
2
1
1
1
2
=
−
−
=
=
=
y
y
y
dt
dy
y
y
dt
dy
w przedziale t [0,15], przy zadanych warunkach początkowych. Wykreślić przebiegi czasowe i
trajektorię. Podać wartość y
1
i y
2
dla t=1 i t=5
⎥
⎦
⎤
⎢
⎣
⎡
=
⎥
⎦
⎤
⎢
⎣
⎡
=
⎥
⎦
⎤
⎢
⎣
⎡
−
−
=
0
1
)
0
(
*
5
,
0
1
2
0
2
1
y
y
y
y
y
dt
dy
Pliki funkcyjny równanie różniczkowego row1.m
Kod:
function dy=row1(t,y)
dy=zeros(2,1);
dy(1)=2*y(2);
dy(2)=-y(1)-0.5*y(2);
Plik skryptowy rr1.m
Kod:
[t,y]=ode45(‘row1’,[0 14],[1;0]);
subplot(2,1,1)
plot(t,y(:,1),t,y(:,2)),grid on
title(‘przebiegi czasowe’)
subplot(2,1,2)
plot(y(:,1),y(:,2),grid on
title(‘trajektoria’)
y_p=interp1(t,y,[1,5],’linear’)
Wynik:
Przepisał: Blick © Materiały dostarczył: qWest © Pomagał: L3Vy ©
PWSZ Tarnów 2007
28
Laboratorium z metod numerycznych – Informatyka Stosowana I .
y_p =
0.2550 -0.1284
6.4 Równanie różniczkowe n-tego rzędu
0.2760 -0.5477
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
=
−
−
1
1
,
,
,
,
n
n
n
n
dt
y
d
dt
dy
y
t
f
dt
y
d
L
podstawiamy
1
1
2
1
−
−
=
=
=
n
n
n
dt
y
d
y
dt
dy
y
y
y
L
otrzymujemy uk
ład równań pierwszego rzędu
⎪
⎪
⎪
⎪
⎩
⎪⎪
⎪
⎪
⎨
⎧
=
2
1
y
dy
=
=
)
,
,
,
,
(
2
1
3
2
n
n
n
y
y
y
t
f
dt
y
d
y
dt
dy
dt
K
M
Przykład:
Rozwiąż równanie w przedziale 0 … 10
Przepisał: Blick © Materiały dostarczył: qWest © Pomagał: L3Vy ©
PWSZ Tarnów 2007
29
Laboratorium z metod numerycznych – Informatyka Stosowana I .
)
cos(
*
*
'
0
)
0
(
0
)
0
(
'
,
1
)
0
(
)
cos(
*
*
4
1
3
1
3
3
2
2
1
0
1
1
2
1
4
)
1
(
30
t
e
y
y
y
y
dt
d
y
y
dt
d
dt
y
y
y
y
y
y
y
y
y
t
e
y
y
n
n
+
+
−
=
=
=
=
=
=
=
−
=
=
−
−
−
6
y
y
+
y
y
d
=
.5
Równanie Van der Pola
al m
(1)^2)*y(2)];
0
'
*
)
1
(
2
=
+
−
+
y
y
y
y
n
µ
Kod:
function dy=row_vdp(t,y)
glob
dy=[y(2);-y(1)+m*(1-y
d:
r all
;
Ko
clea
global m
m=2;
[t,y]=ode45(‘row_vdp’,[0 20],[2:0]
plot(t,y(:,1)),grid on
e zadanie:
równanie różniczkowe
Kod:
function dx=de(t,x)
dx=[x(2);((2/t^2-1)*x(1))-x(2)/t];
Przykładow
Rozwiąż
Kod:
[t,x]=ode45(‘de’,[0.01 15],[1 0]);
plot(t,x(:,1));grid on
x_5=interp1(t,x(:,1),5,’linear’)
Przepisał: Blick © Materiały dostarczył: qWest © Pomagał: L3Vy ©
PWSZ Tarnów 2007
Laboratorium z metod numerycznych – Informatyka Stosowana I .
Przepisał: Blick © Materiały dostarczył: qWest © Pomagał: L3Vy ©
PWSZ Tarnów 2007
31
Wynik:
Document Outline
- Wprowadzenie do metod
- Macierze,wektory i uklady rownan
- Rozwiazywanie ukladow rownan
- Rozklad LU
- Interpolacja i aproksymacja
- Metoda funkcji bazowych
- Wielomiany
- Aproksymacja
- Przyblizone rozwiazywanie rownan nieliniowych
- Metoda bisekcji
- Metoda newtona, iteracji
- Polecenia Matlaba
- Calkowanie i rozniczkowanie numeryczne
- Polecenia matlaba dotyczace calek
- Calkowanie numeryczne
- Rownania rozniczkowe
- Funkcje ODE w matlabie
- Rownania rozniczkowe n-tego rzedu
- Rownanie Van der Pola
Wyszukiwarka
Podobne podstrony:
Projekt numeryczny, IŚ Tokarzewski 27.06.2016, III semestr, Informatyka (Matlab), Projekty, Matlab -
2. Matlab, aaa, studia 22.10.2014, Materiały od Piotra cukrownika, metody numeryczne w technice, lab
Matlab co tam, aaa, studia 22.10.2014, Materiały od Piotra cukrownika, metody numeryczne w technice,
Wstep do Matlaba, Matematyka, Metody numeryczne
Metody numeryczne, III sprwako matlab, LABORATORIUM Z
MATLAB - Wprowadzenie do Matlaba, Studia, Sprawozdania, Metody numeryczne
1. Matlab. Zapoznanie z programem, Elektrotechnika - notatki, sprawozdania, Metody numeryczne w tech
model rywalizacji, IŚ Tokarzewski 27.06.2016, III semestr, Informatyka (Matlab), Projekty, Matlab -
2. Matlab. Algebra liniowa, Elektrotechnika - notatki, sprawozdania, Metody numeryczne w technice
Matlab Metody numeryczne
Metody numeryczne w6
metoda siecznych, Elektrotechnika, SEM3, Metody numeryczne, egzamin metody numeryczn
MN energetyka zadania od wykładowcy 09-05-14, STARE, Metody Numeryczne, Część wykładowa Sem IV
METODA BAIRSTOWA, Politechnika, Lab. Metody numeryczne
więcej podobnych podstron