Przemienniki cz stotliwo ci i silniki trójfazowe
Moment obrotowy
M
rozwijany przez silnik asynchroniczny jest proporcjonalny do
pr du
w
I
i strumienia
φ
:
w
I
M
×
φ
~
, gdzie
w
I
jest pr dem wirnika, a
φ
jest strumieniem
magnetycznym w szczelinie powietrznej silnika.
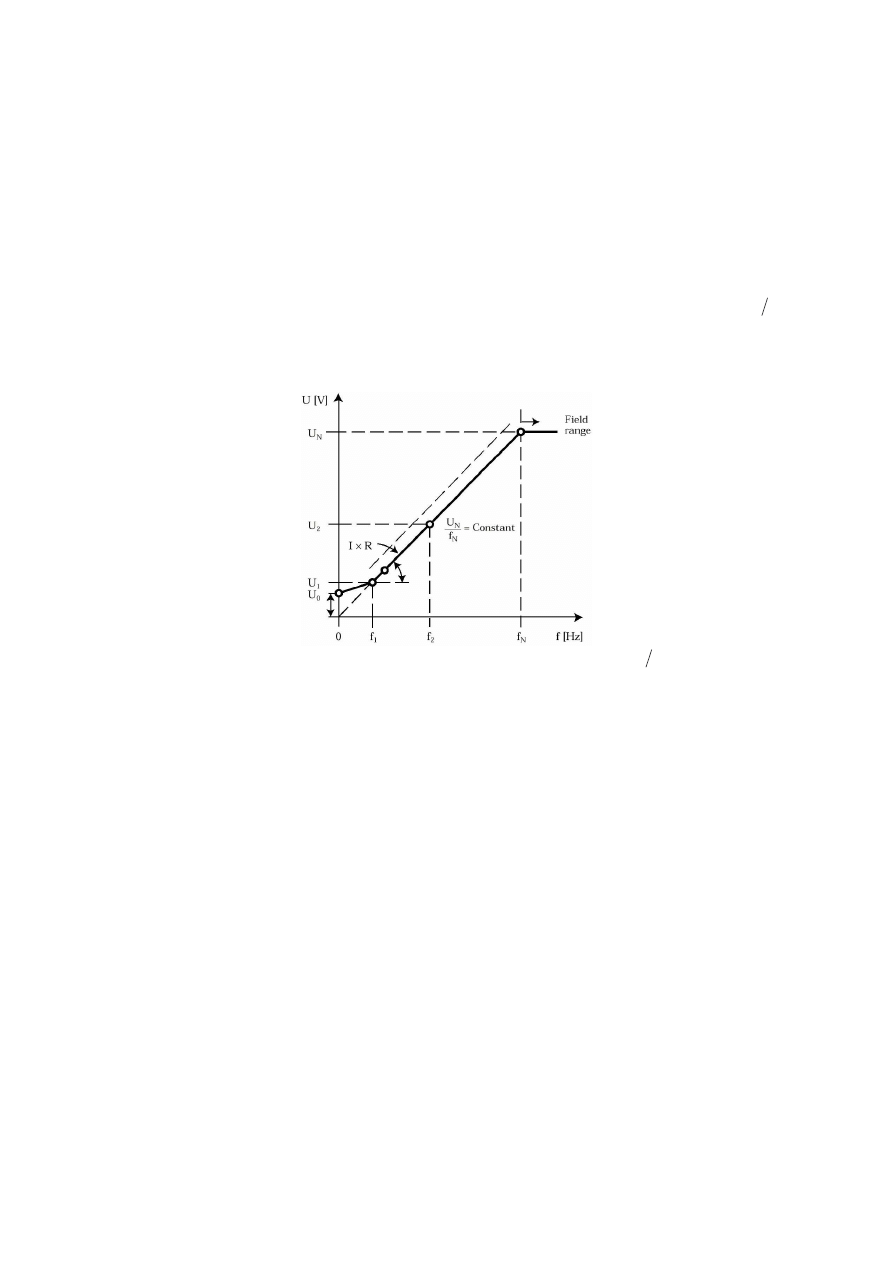
Do optymalizacji momentu obrotowego silnika, strumie magnetyczny (
f
V
~
φ
)
w szczelinie powietrznej silnika musi by utrzymany na stałym poziomie. To znaczy, e
je li zmieniamy warto cz stotliwo ci, warto napi cia musi by zmieniona
proporcjonalnie, rys. 1.
Rys. 1. Sterowanie napi ciem w funkcji cz stotliwo ci - charakterystyka
const
f
U
=
.
Dla ci kich rozruchów np. w podno nikach rubowych, konieczna jest
optymalizacja momentu rozruchowego i wymuszenie dodatkowego napi cia
pocz tkowego
0
U
. W le dobranych warunkach zasilania silnik po prostu nie ruszy.
Kiedy silnik jest obci ony i pracuje w zakresie małych pr dko ci -
Hz
f 10
−
, wyst puje
du y spadek napi cia na rezystancji uzwoje stojana. W szczególno ci dotyczy to
małych silników. W konsekwencji ten spadek napi cia prowadzi do wyra nego
osłabienia strumienia
φ
w szczelinie powietrznej.
Aby utrzyma stały strumie silnika spadek napi cia na rezystancji uzwoje
silnika musi by kompensowany, a najprostszymi metodami realizuj cymi ten cel s :
• zwi kszenie napi cia wyj ciowego przemiennika cz stotliwo ci w zakresie małych
pr dko ci silnika przez wykorzystanie otwartej p tli sterowania.
• regulacja napi cia wyj ciowego przemiennika cz stotliwo ci poprzez wykorzystanie
oddziaływania na warto składowej czynnej pr du wyj ciowego przemiennika.
Ta kompensacja nazywana jest: kompensacj
R
I
×
, podbiciem napi cia (ang. boost),
zwi kszeniem momentu (ang. torque raising). Taki sposób oddziaływania na warto
napi cia wyj ciowego przemiennika cz stotliwo ci ma pewne ograniczenia wynikaj ce
z wyst puj cych zakłóce . Uniemo liwiaj one wła ciwe przeprowadzenie pomiarów
warto ci skutecznej napi cia wyj ciowego przemiennika, szczególnie przy szybkich
zmianach obci enia, np. w nap dach z wahadłowym obci eniem silnika rezystancja

uzwojenia fazowego waha si w granicach 25% mi dzy silnikiem ciepłym a zimnym.
Warto napi cia kompensacji powinna wtedy przyjmowa ró ne warto ci. Niewła ciwa
warto tego napi cia przy silniku nie obci onym mo e prowadzi do jego
przemagnesowania, a gdy silnik jest obci ony do zmniejszenia głównego strumienia. W
przypadku przemagnesowania silnika, nast pi przepływ składowej biernej pr du o
nadmiernej warto ci, co prowadzi do przegrzewania silnika. W przypadku doci enia
silnika przemagnesowanego b dzie rozwijał on mały moment z powodu osłabionego
strumienia głównego, co mo e spowodowa jego zatrzymanie.
Warunki pracy silnika
Kompensacja
W niektórych przypadkach trudno jest wła ciwie dostroi przemiennik
cz stotliwo ci do silnika, niektóre z funkcji kompensacyjnych takie jak napi cie startu
0
U
, start, kompensacja po lizgu, s trudne do zrozumienia.
Jakkolwiek, obecnie bardziej zaawansowane technicznie przemienniki
cz stotliwo ci automatycznie kontroluj te parametry kompensacyjne na podstawie
cz stotliwo ci, napi cia i pr du silnika. Zwykle nastawy kompensacyjne mog by tak e
zmieniane r cznie.
Zale ne i niezale ne od obci enia silnika parametry kompensacji
Parametry kompensacyjne umo liwiaj zapewnienie optymalnego magnesowania
i tym samym maksymalnego momentu, zarówno przy starcie silnika jak i od małych do
maksymalnie dopuszczalnych pr dko ci silnika. Napi cie przemiennika otrzymuje
odpowiednie napi cie dodatkowe, które efektywnie kompensuje wpływ spadku napi cia
na rezystancji uzwoje przy niskich cz stotliwo ciach. Zale ne od obci enia parametry
wpływaj ce na warto napi cia dodatkowego napi cia kompensacji - start
i kompensacja po lizgu, zale od dokładno ci pomiaru pr du obci enia - składowej
czynnej tego pr du. Parametr -napicie startu, nie zale y od obci enia i zapewnia
optymaln warto momentu w zakresie małych pr dko ci silnika.
Silniki, które s znacznie mniejsze od wymaganych dla danego przemiennika
cz stotliwo ci potrzebuj r cznego ustawienia napi cia startu dla zapewnienia
wła ciwego magnesowania w zakresie małych pr dko ci silnika – niskich cz stotliwo ci
pracy przemiennika.
Je li kilka silników jest doł czonych do jednego przemiennika cz stotliwo ci -
praca równoległa, funkcje kompensacji napi cia zale ne od obci enia powinny by
wył czone. W przypadku stosowania przemienników cz stotliwo ci najnowszych
generacji kompensacja napi cia, w typowych zastosowaniach, jest realizowana
automatycznie przez przemiennik cz stotliwo ci.
Kompensacja po lizgu
Po lizg w silnikach asynchronicznych jest zale ny od obci enia i wynosi około 5%
pr dko ci nominalnej silnika. St d, dla dwubiegunowego silnika po lizg b dzie wynosi
150 obr./min. Przy sterowaniu silnika przemiennikiem cz stotliwo ci po lizg mo e
wynosi ok. 50% w zakresie małych obrotów np. 300 obr./min. (tj. 10% warto ci
nominalnej).Je li przemiennik cz stotliwo ci steruje prac silnika w zakresie 5%
warto ci nominalnej pr dko ci obrotowej przy pełnym obci eniu, to silnik mo e nie
ruszy . Po lizg nie jest zjawiskiem korzystnym, lecz mo e by w pełni skompensowany
przez przemiennik cz stotliwo ci poprzez efektywny pomiar składowej czynnej pr du na
wyj ciach fazowych - fazowych pr dów silnika.
Kompensacja po lizgu jest realizowana przez odpowiednie zwi kszenie cz stotliwo ci
napi cia wyj ciowego przemiennika cz stotliwo ci. Ta metoda jest nazywana czynn
kompensacj po lizgu (ang. active slip compensation).
Charakterystyki momentu silnika
Ograniczenie pr dowe
Je li przemiennik cz stotliwo ci byłby zdolny do przesłania pr dów wielokrotnie
wi kszych od pr dów znamionowych silnika, charakterystyki momentu mogłyby
przebiega jak przedstawione na rysunku 2.
Rys. 2. Charakterystyki momentu silnika zasilanego z przemiennika cz stotliwo ci mog by
zawarte w zakresach zaznaczonych prostok tami.
Tak du e pr dy, które mogłyby uszkodzi silnik lub elementy energoelektroniczne
przemiennika cz stotliwo ci, nie s wymagane dla zapewnienia normalnej pracy silnika.
W konsekwencji przemiennik ogranicza pr d silnika przez zmniejszanie napi cia
i cz stotliwo ci wyj ciowej. Poziom ograniczenia pr dowego jest regulowany
i gwarantuje, e silnik nie b dzie pobierał zbyt du ego pr du przez dłu szy czas, co
mogłoby doprowadzi do jego uszkodzenia. Poniewa przemiennik cz stotliwo ci
steruje pr dko ci silnika niezale nie od obci enia mo liwe jest zadanie ró nych
warto ci poziomu ogranicze pr dowych (pr dów granicznych) dla ró nych przedziałów
pr dko ci obrotowych silnika.
Charakterystyki momentu silnika zawieraj si w obszarze pr dów znamionowych
przemiennika cz stotliwo ci. Jednak e przewag przemiennika cz stotliwo ci jest
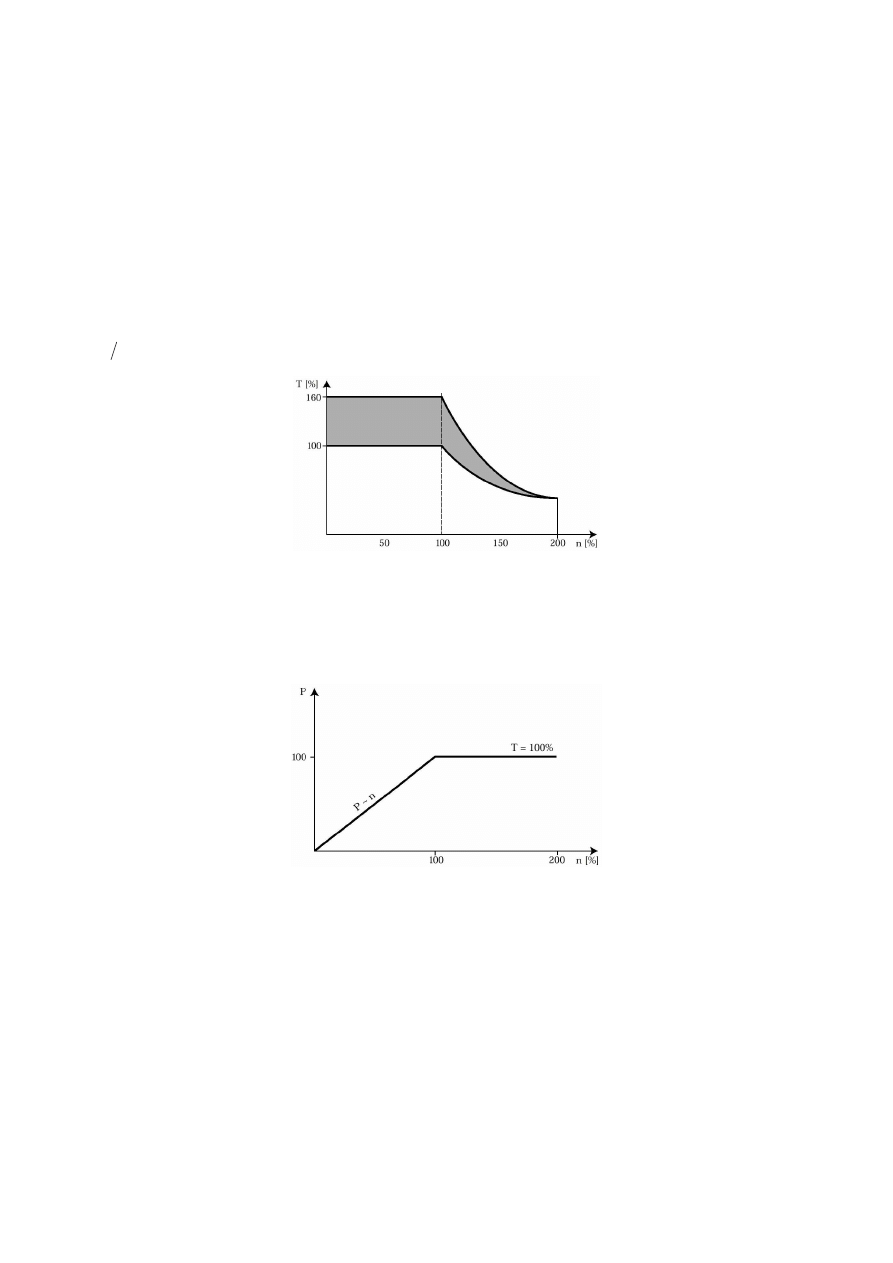
mo liwo zwi kszenia momentu silnika ponad jego moment znamionowy,
np. uzyskanie 160% warto ci momentu znamionowego przez dłu szy lub krótszy okres
czasu. Jest tak e mo liwe dla przemiennika cz stotliwo ci sterowanie prac silnika przy
pr dko ciach wi kszych od jego pr dko ci synchronicznej. Silnik mo e pracowa przy
pr dko ciach nadsynchronicznych w zakresie ok. 200% nominalnych obrotów.
Przemiennik nie jest w stanie dostarczy wy szego napi cia ni napi cie sieci,
z której jest zasilany, co prowadzi do zmniejszania si stosunku napi cia zasilania
silnika do cz stotliwo ci przy przekraczaniu pr dko ci znamionowych. Wówczas pole
magnetyczne słabnie i moment wytwarzany na wale silnika zmniejsza si w stosunku
n
1
.
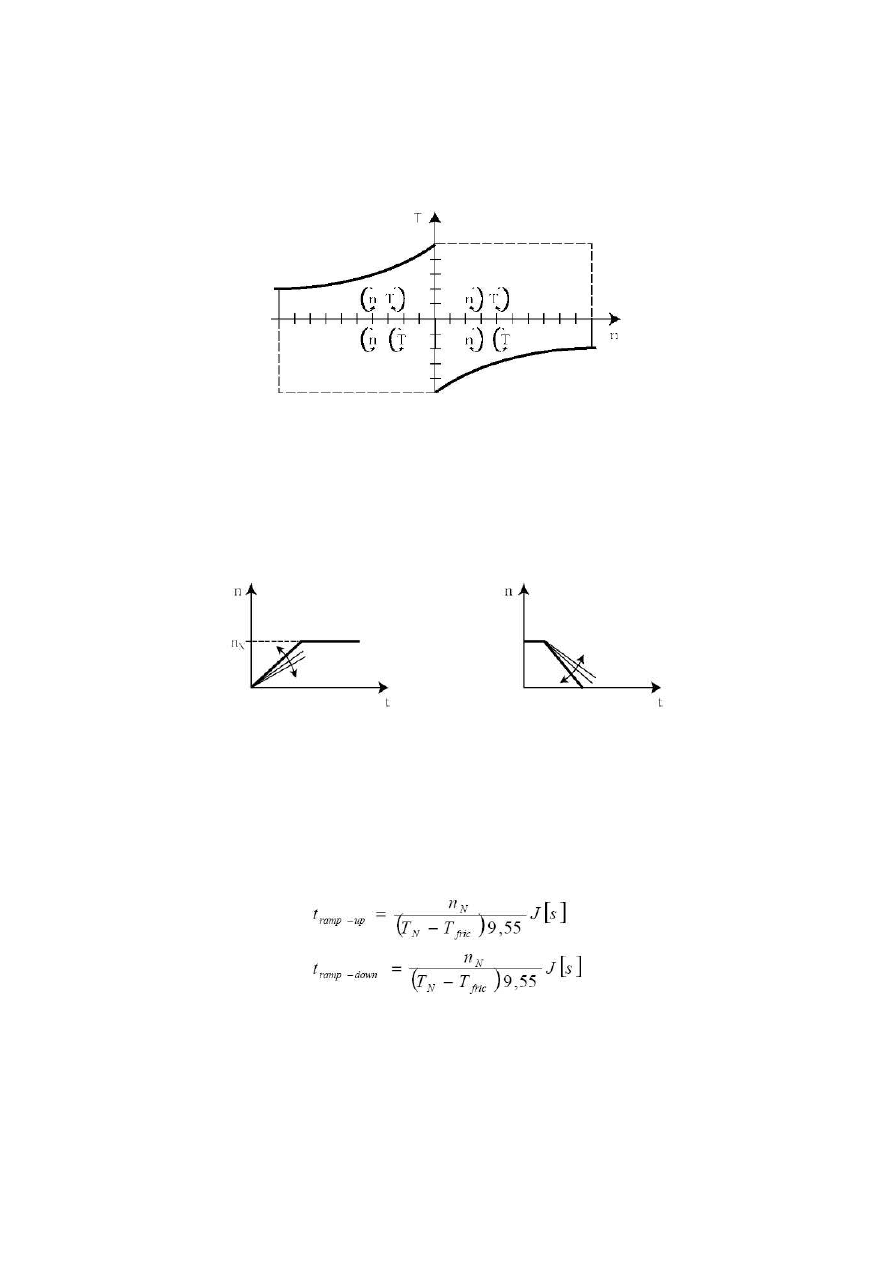
Rys. 3. Moment silnika w I i II strefie regulacji (I - obszar pr dko ci podsynchronicznych,
II – obszar pr dko ci nadsynchronicznych).
Maksymalny pr d na wyj ciu przemiennika cz stotliwo ci pozostaje niezmieniony
(
const
I
s
=
). To prowadzi do utrzymania stałej mocy silnika w przedziale pr dko ci od
nominalnej do ok. 200% ponad pr dko nominaln .
Rys. 4. Przebieg mocy czynnej silnika w funkcji pr dko ci obrotowej.
Szybko silnika mo e by wyra ona na trzema ro nymi sposobami:
• w obrotach na minut - rpm,
• w hercach - Hz,
•
w procentach nominalnej pr dko ci silnika - %.
Punktem odniesienia jest zawsze pr dko nominalna przy nominalnej
cz stotliwo ci.
Rys. 5. Przedstawienie opisu pr dko ci silnika (tutaj dla silnika dwubiegunowego).
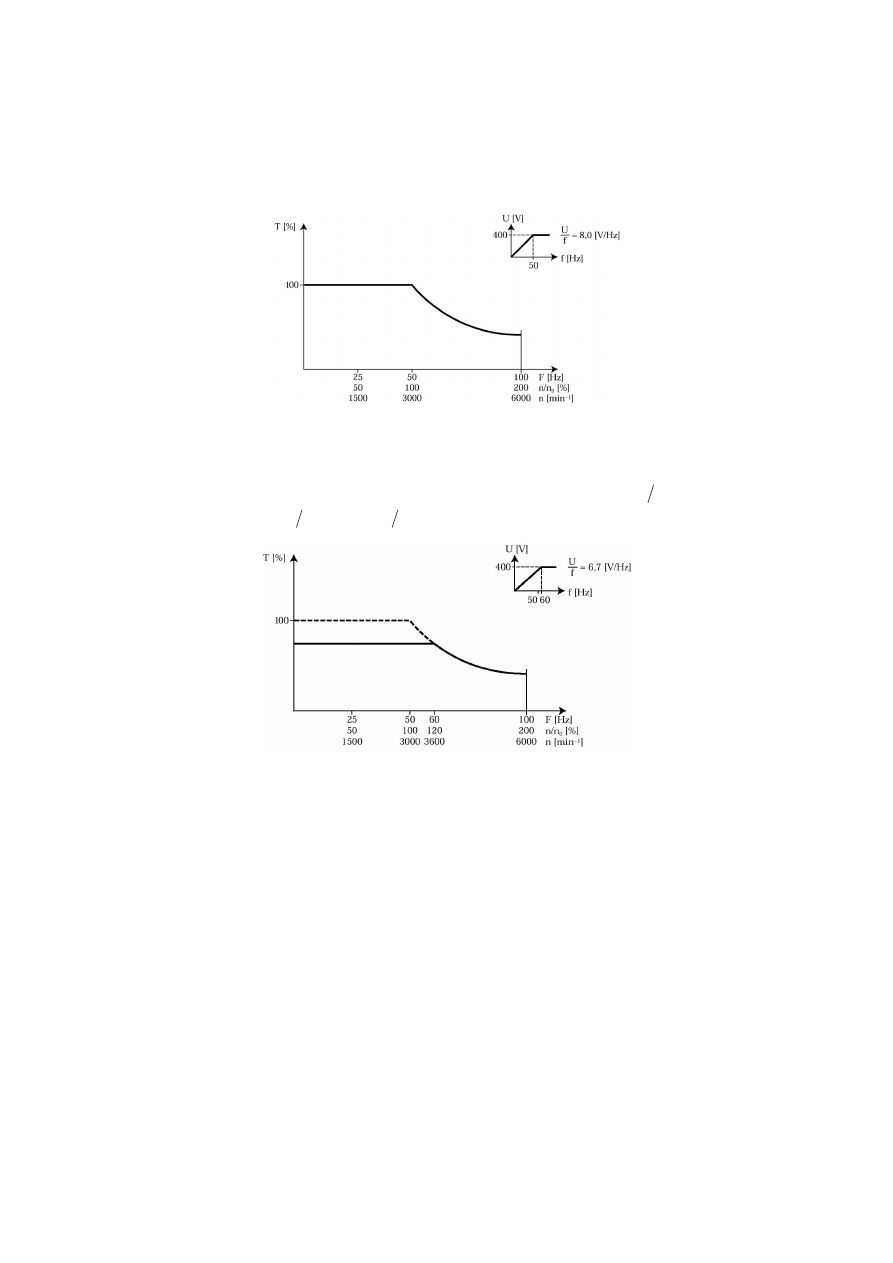
Zmiana stosunku napi cia do cz stotliwo ci ma wpływ na przebieg
charakterystyk momentu obrotowego silnika. Na rysunkach poni ej pokazany jest
przebieg charakterystyk momentu w zale no ci od stosunku
f
U
, zmniejszenie
stosunku z warto ci
Hz
V
0
.
8
na
Hz
V
7
.
6
powoduje zmniejszenie warto ci momentu.
Rys. 6. Przebieg momentu przy ró nych stosunkach U/f.
Wymagania stawiane zaawansowanym cyfrowym przemiennikom
cz stotliwo ci
Rozwój energoelektroniki, technologii mikroprocesorowej oraz układów scalonych
odegrały ogromn rol w rozwoju nowoczesnych przemienników cz stotliwo ci,
a w szczególno ci opartych na układach cyfrowych, które cechuj si wi ksz
szybko ci i dokładno ci przetwarzania danych.
Dodatkowymi atutami cyfrowych urz dze stosowanych w nap dach s :
• polepszenie powtarzalno ci i stabilno parametrów sterowania,
• łatwiejsze sterowanie układami pomiarowymi,
• elastyczno urz dze w zastosowaniach do nietypowych aplikacji,
• precyzyjniejsze sterowanie, tak e z wi kszych odległo ci np.: ł cza modemowe
RS485, itp.
Stare analogowe przemienniki cz stotliwo ci posiadały analogowe podzespoły
regulacyjne: potencjometry, elementy bierne, których parametry zmieniały si wraz ze
zmian temperatury i co stwarzało dodatkowo szereg problemów z cz ciami
zamiennymi. Natomiast w przemiennikach cyfrowych jest to, e wszystkie parametry
sterowania mog by zapisane w pami ci EEPROM.
Mikroprocesor pozwala na łatw realizacj takich funkcji jak: czynna kontrola
przemiennika, przeł czanie mi dzy zestawami wprowadzanych danych, itp. Nawet
kompletne procedury programowe - sterowania procesami i inne w pełni inteligentne
procedury dla nietypowych nap dów silników mog by zawarte w układzie sterowania
przemiennika cz stotliwo ci. Produkowane dzisiaj przemienniki cz stotliwo ci do
nap dów silników pr du przemiennego - AC charakteryzuj si odpowiednio du
dynamik pracy dla szerokiego zakresu regulacji pr dko ci i s stosowane
w aplikacjach, gdzie poprzednio jedynie mo na było stosowa przekształtniki napi cia
stałego - DC i silniki pr du stałego. Wymagania nap dów w nowych obszarach aplikacji
spowodowały porzucenie techniki sterowania przemienników wg metody
f
U
i wprowadzone zostały do przemienników metody sterowania napi ciem silnika wg
wektora napi cia zorientowanego polowo (ang. Field Oriented Vector Control).
Dobór przemiennika cz stotliwo ci
Kiedy decydujemy o rodzaju przemiennika cz stotliwo ci, pierwszym krokiem jest
rozwa enie przebiegu charakterystyki obci enia silnika funkcji pr dko ci. Mo emy
wyró ni cztery metody wyznaczania wymaganych osi gów wyj ciowych przemiennika
cz stotliwo ci, wybór metody zale y od danych silnika.
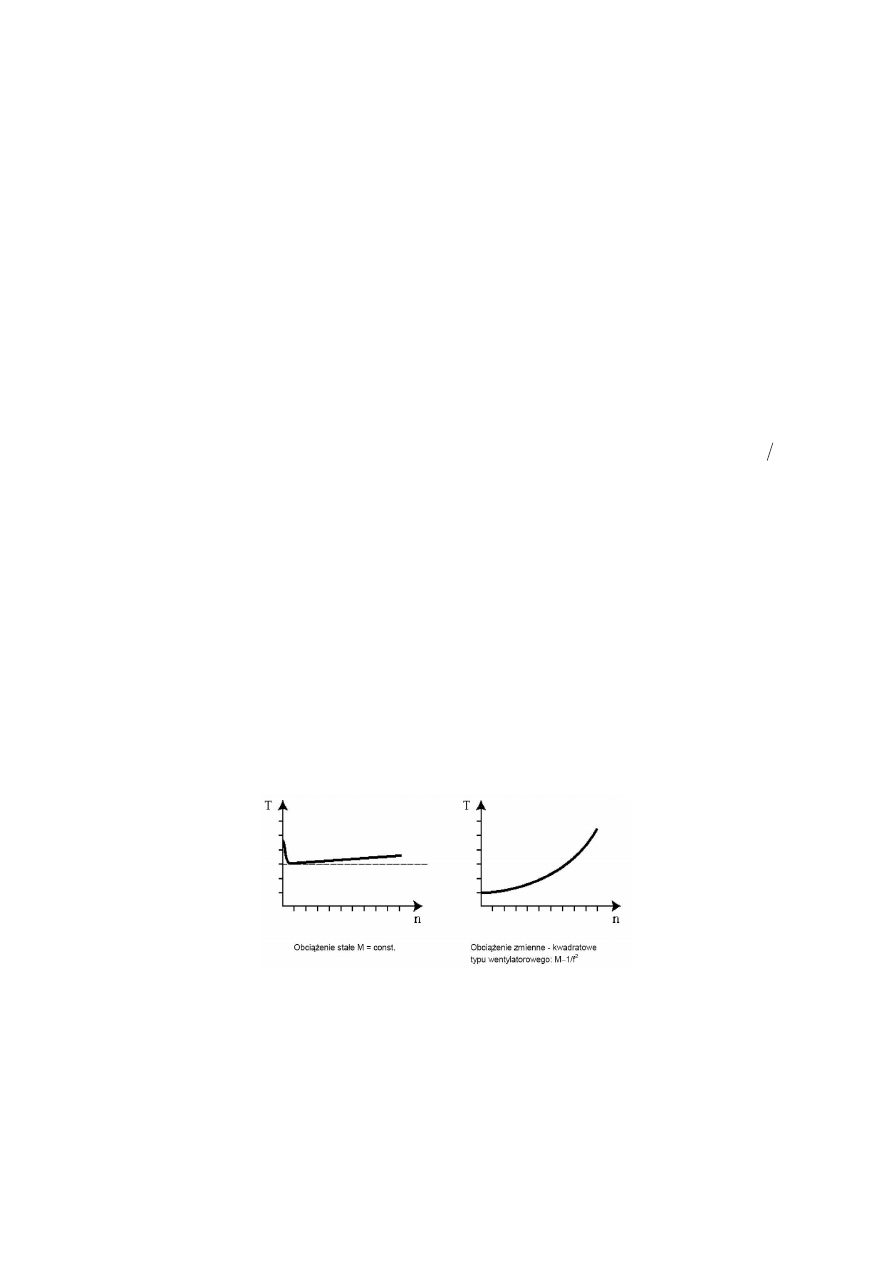
Rodzaje charakterystyk obci enia
Zanim zdecydujemy si na okre lenie rodzaju przemiennika cz stotliwo ci, nale y
rozwa y , która z dwóch najcz ciej wyst puj cych charakterystyk obci enia jest
w danym przypadku, rysunku 7.
Rys. 7. Stałe i zmienne w kwadracie do pr dko ci obci enie momentem roboczym silnika.
Przesłanki dla odró nienia charakterystyk obci enia s nast puj ce:
kiedy pr dko pomp od rodkowych i wentylatorów wzrasta, moc równie
wzrasta proporcjonalnie do pr dko ci w trzeciej pot dze
)
(
3
n
f
P
=
,
podczas normalnej pracy pomp od rodkowych i wentylatorów pr dko jest
regulowana w zakresie
%
90
50
−
pr dko ci znamionowej. Obci enie wzrasta
w kwadracie pr dko ci obrotowej silnika i mo e przykładowo kształtowa si na
poziomie
%
80
30
−
.
Te dwa czynniki s uwzgl dniane w charakterystykach momentu przemiennika
cz stotliwo ci przy sterowaniu silnika.
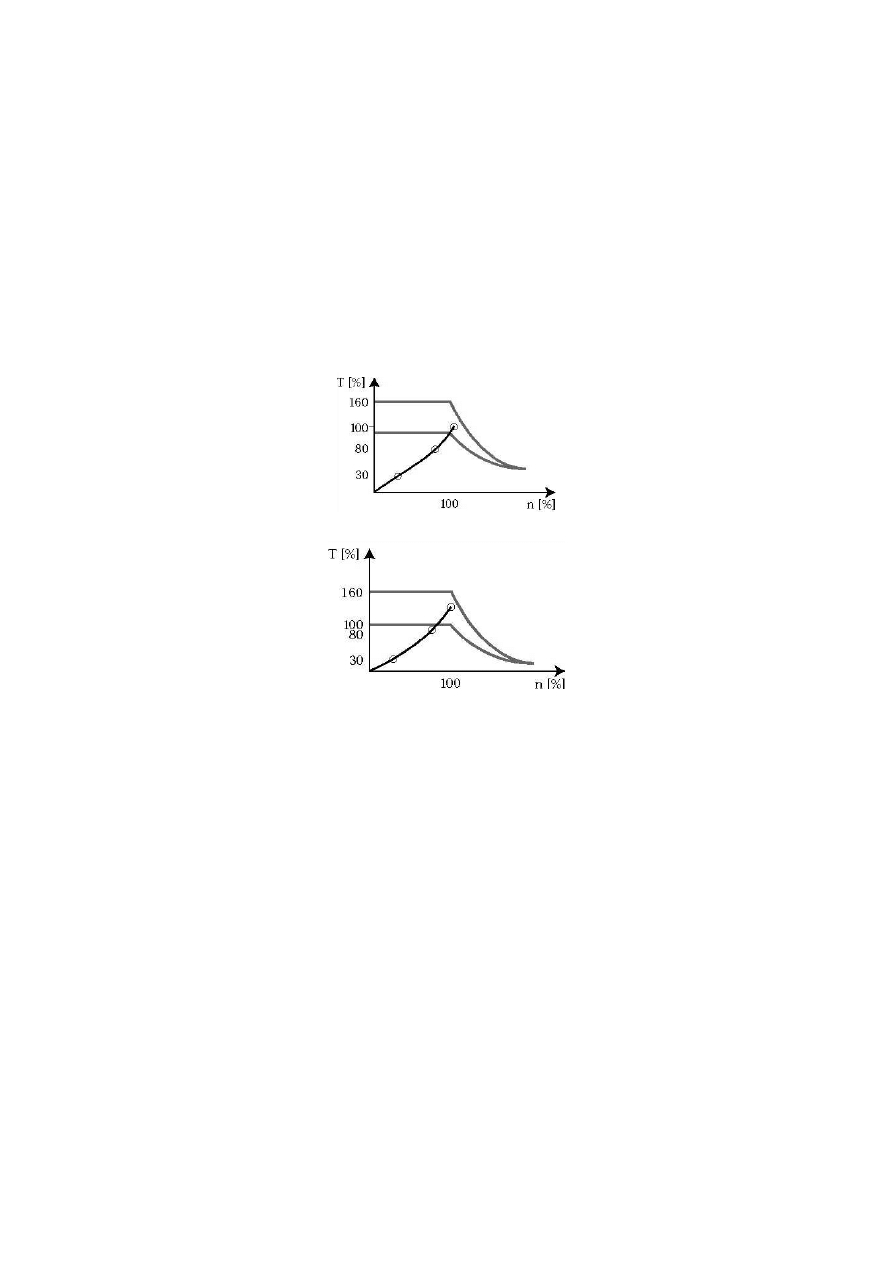
Rysunki 8 i 9 pokazuj przebieg charakterystyk momentu dla dwóch ro nych pod
wzgl dem mocy przemienników cz stotliwo ci - jeden z nich ma moc mniejsz od mocy
nominalnej silnika. Oba przemienniki obci one s tym samym momentem, typowym dla
pomp od rodkowych.
Rys. 8. Du y przemiennik cz stotliwo ci - moc i pr dy dobrane do warto ci nominalnych silnika.
Rys. 9. Mniejszy przemiennik cz stotliwo ci - moc i pr dy mniejsze od warto ci nominalnych silnika.
Na rysunku 8 mo emy zauwa y , e całkowity obszar pracy pompy (
%
100
0
−
)
le y w granicach warto ci silnika. Poniewa obszar normalnej pracy pompy do tego
przypadku wynosi
%
80
30
−
pr dko ci znamionowej, dlatego przemiennik cz stotliwo ci
o mniejszej mocy mo e by tu tak e zastosowany.
Je eli obci enie silnika jest stale, silnik musi by zdolny do wytworzenia
wi kszego momentu ni moment obci aj cy. Nadwy ka momentu zu ywana jest do
zapewnienia odpowiedniego rozp dzania (przyspieszania) wału silnika.
Moment nadmiarowy o warto ci ok.
%
60
wytwarzany przez przemiennik
cz stotliwo ci przez krótki okres czasu, jest wystarczaj cy dla zapewnienia
odpowiedniego przyspieszenia silnika i uzyskania du ego momentu rozruchowego;
np. w nap dzie ta moci gu. Mo liwo przeci enia przemiennika zapewnia, e system
jest zdolny radzi sobie z nagłym chwilowym wzrostem obci enia. Przemiennik
cz stotliwo ci nie dopuszcza, aby jakiekolwiek przeci enie momentem M
B
wykraczało
poza granice zało one granice, np. okre lone parametrami znamionowymi
przemiennika, rysunek 10.
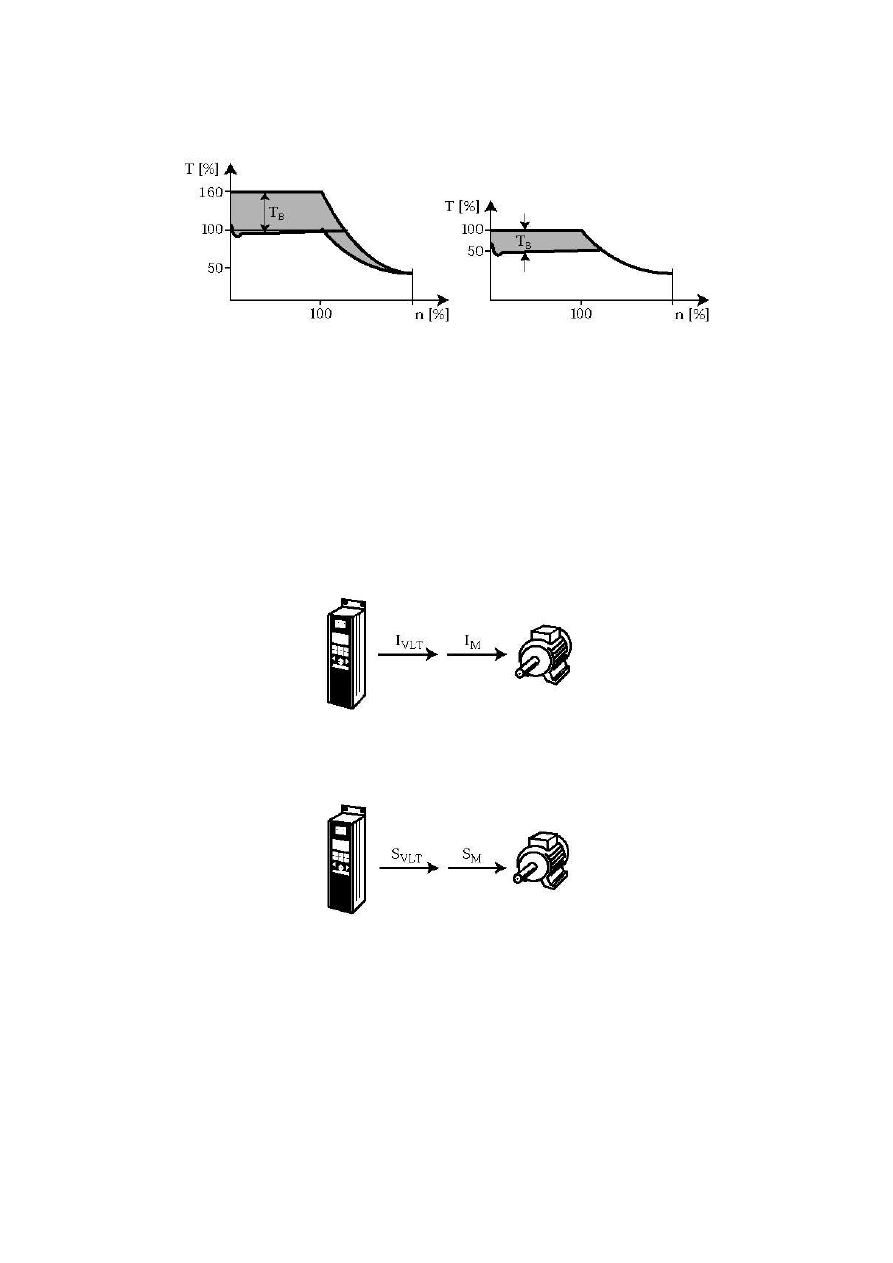
Rys. 10. Nadmiarowy moment rozruchowy silnika jest wykorzystywany dla zapewnienia
odpowiedniego przy pieszenia.
Mo liwo przeci enia gwarantuje, e system jest zdolny radzi sobie z nagł
zmian obci enia.
Kiedy charakterystyki obci enia maszyny roboczej s znane – przebieg
momentu obci enia w funkcji pr dko ci silnika, wtedy o doborze typu przemiennika
cz stotliwo ci decyduj 4 ro ne zestawy danych technicznych silnika.
1. Typ przemiennika cz stotliwo ci mo e zosta szybko i dokładnie wybrany na
podstawie pr du I
M
, który pobiera silnik. Je eli silnik nie jest w pełni obci ony,
pr d silnika mo e zosta zmierzony w podobnym nap dzie pracuj cym przy
pełnej wydajno ci.
Rys. 11. Wybór przemiennika cz stotliwo ci na podstawie nominalnego pr du silnika.
2. Przemiennik cz stotliwo ci mo na dobiera na podstawie mocy pozornej
M
S
pobieranej przez silnik i dostarczanej z przemiennika cz stotliwo ci.
Rys. 12. Wybór przemiennika cz stotliwo ci bazuj cy na warto ci mocy pozornej
M
S
.
3. Przemiennik mo e by równie dobierany wg mocy czynnej
M
P
wytwarzanej
przez silnik. Jednak e, poniewa
ϕ
cos
i sprawno
η
silnika zmieniaj si wraz
z obci eniem, to ta metoda jest nieprecyzyjna.
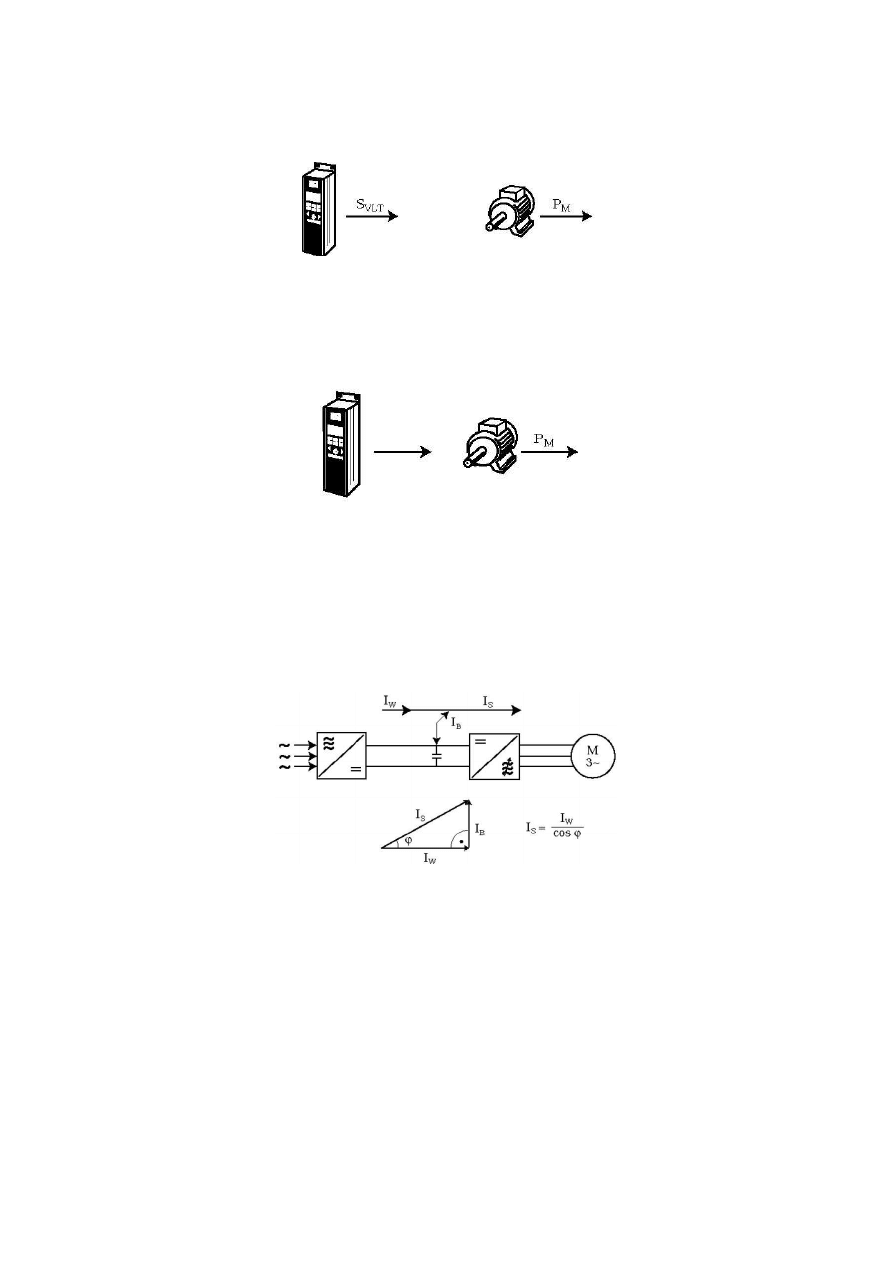
Rys. 13. Wybór przemiennika cz stotliwo ci w zale no ci od mocy czynnej na wale silnika.
4. Z praktycznych przyczyn moc znamionowa wi kszo ci przemienników jest
specyfikowana dla standardowych serii - typoszeregu silników asynchronicznych.
W wyniku tego przemienniki cz sto s dobierane na tej podstawie, ale mo e to
prowadzi do nie precyzyjnego dopasowania, w szczególno ci je eli silnik jest
przeznaczony do pracy z nie pełnym obci eniem.
Rys. 14. Wybór przemiennika na podstawie na podstawie standardowych serii silników.
Rozpływ pr du w przemienniku cz stotliwo ci. Współczynnik mocy
silnika
ϕ
cos
Pr d magnesuj cy silnika jest przesyłany z kondensatora obwodu po redniego
przemiennika cz stotliwo ci. Pr d magnesuj cy jest pr dem biernym płyn cym mi dzy
kondensatorem i silnikiem, rys. 15.
Rys. 15. Pr dy w przemienniku cz stotliwo ci.
Tylko pr d czynny
w
I
jest pobierany bezpo rednio z sieci zasilaj cej. Dlatego
pr d wyj ciowy przemiennika jest zawsze wi kszy ni jego pr d na wej ciu zasilania.
Dodatkowo cz
pr du czynnego
SS
I
I
0
pobierana z transformatora sieci zasilania
powoduje straty wydzielane w sieci zasilaj cej, co mo na wyra nie zaobserwowa
w czasie pracy przemiennika cz stotliwo ci bez obci enia.
Producenci silników normalnie okre laj
ϕ
cos
przy pr dzie nominalnym. Przy
ni szej warto ci
ϕ
cos
- np. dla silnika reluktancyjnego, nominalny pr d silnika – przy tej
samej mocy i nominalnym napi ciu – b dzie wi kszy, jak pokazuje poni sze równanie:
ϕ
cos
w
s
I
I
=
Je eli przemiennik został dobrany zgodnie z kryterium pr dowym - metoda 1,
wtedy nie b dzie mo liwa adna redukcja nominalnego momentu obrotowego.
Kondensator doł czony do zacisków uzwoje silnika zapewnienia odpowiedniego pr du
biernego kompensacji musi by usuni ty. Wysoka cz stotliwo przeł czania zaworów
mocy falownika przemiennika cz stotliwo ci powoduje, składowej przemiennej pr du na
kondensatorze obwodu po redniego, prowadzi to do znacznego wzrostu pr du upływu
w obwodzie po rednim. Przemiennik b dzie traktował to jako zwarcie doziemne lub
zwarcie mi dzyfazowe zasilania i wył czy si .
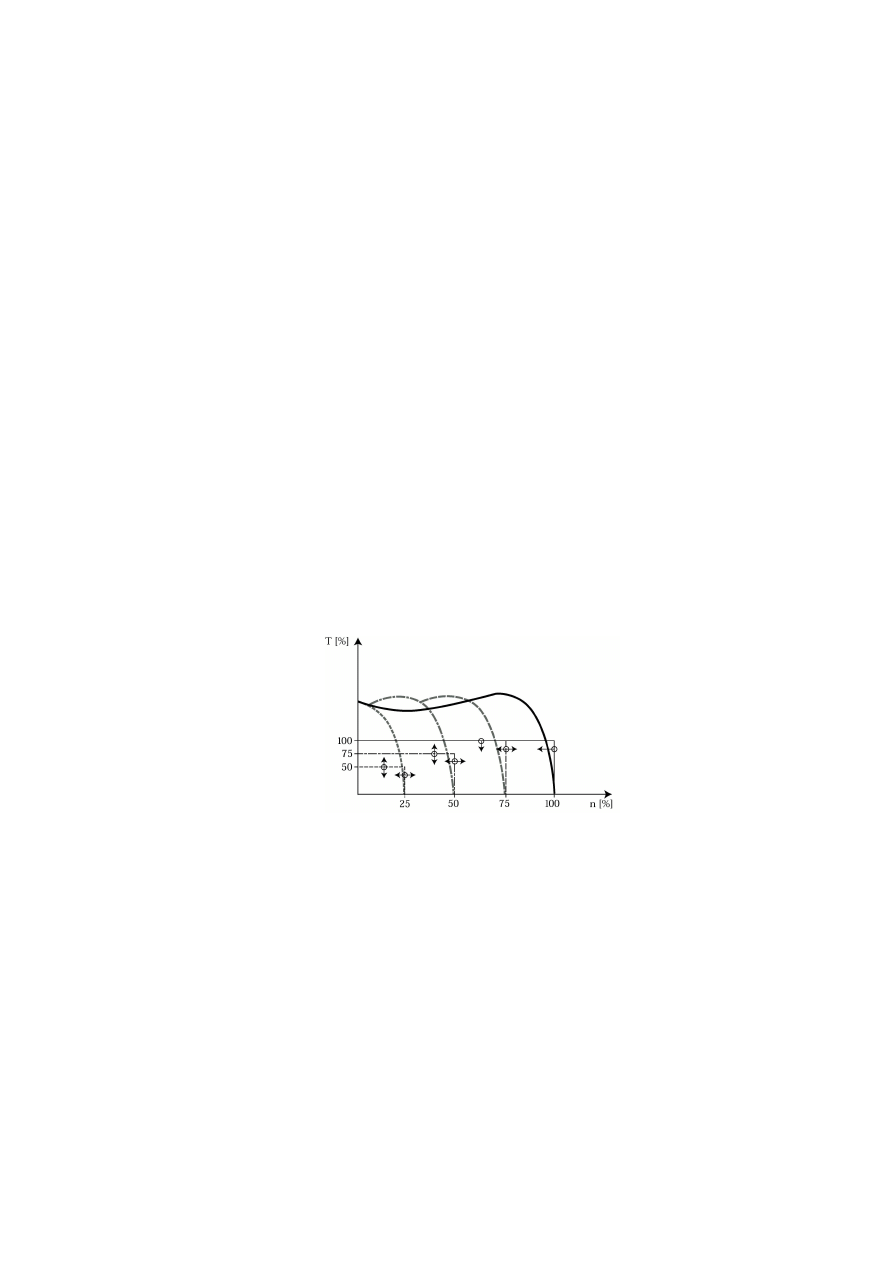
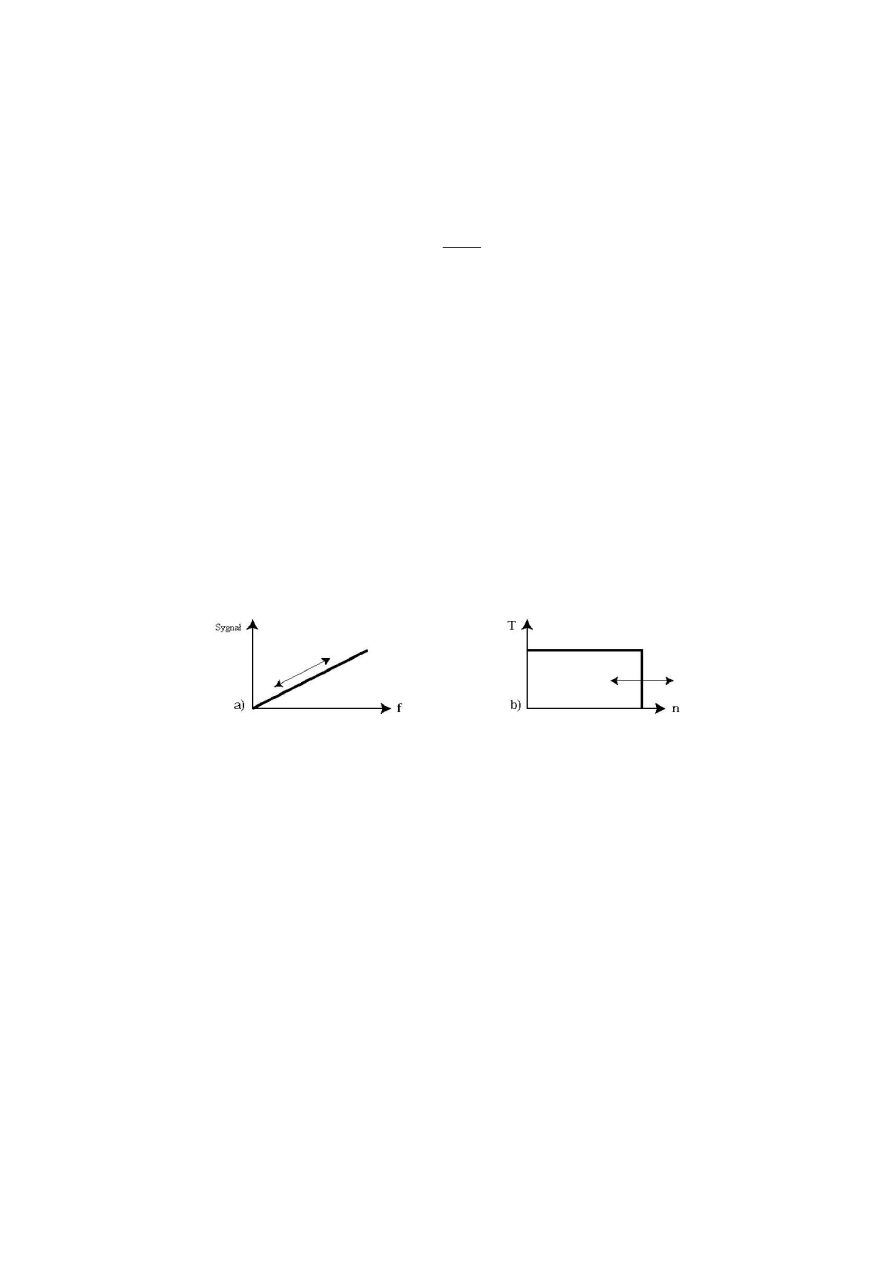
Sterowanie pr dko ci obrotow silnika
Cz stotliwo na wyj ciu przemiennika cz stotliwo ci, a wiec pr dko obrotowa
silnika jest sterowana przez jeden lub wi cej sygnałów: 0-10V; 4-20mA albo napi cie
pulsacyjne, - okre lanych jako sygnały referencyjne pr dko ci. Je eli warto sygnału
referencji wzrasta, pr dko silnika tak e si zwi ksza i pionowa cz
charakterystyki
momentu obrotowego silnika jest przesuwana w prawo rys. 16.
Rys.16. Zale no pomi dzy sygnałem zadawania pr dko ci i charakterystyk momentu silnika
obrotowego silnika.
Gdy moment obci aj cy jest mniejszy ni maksymalny moment nap dowy
silnika, pr dko silnika osi gnie zadan warto . Jak pokazano na rysunku 17
charakterystyka momentu obci enia przecina charakterystyk momentu nap dowego
silnika w pionowej cz ci - punkt A. Je eli przeci cie znajduje si w poziomej cz ci -
punkt B, pr dko silnika nie mo e osi gn wymaganej dla pracy ci głej zadanej
warto ci. Przemiennik umo liwia przekroczenie - przez krótki czas, uderzenia
pr dowego, tj. pr du wi kszego ni zadana maksymalna warto pr du ci głego, bez
zatrzymania nap du - punkt C, ale trzeba pami ta o ograniczeniu czasu jego trwania.
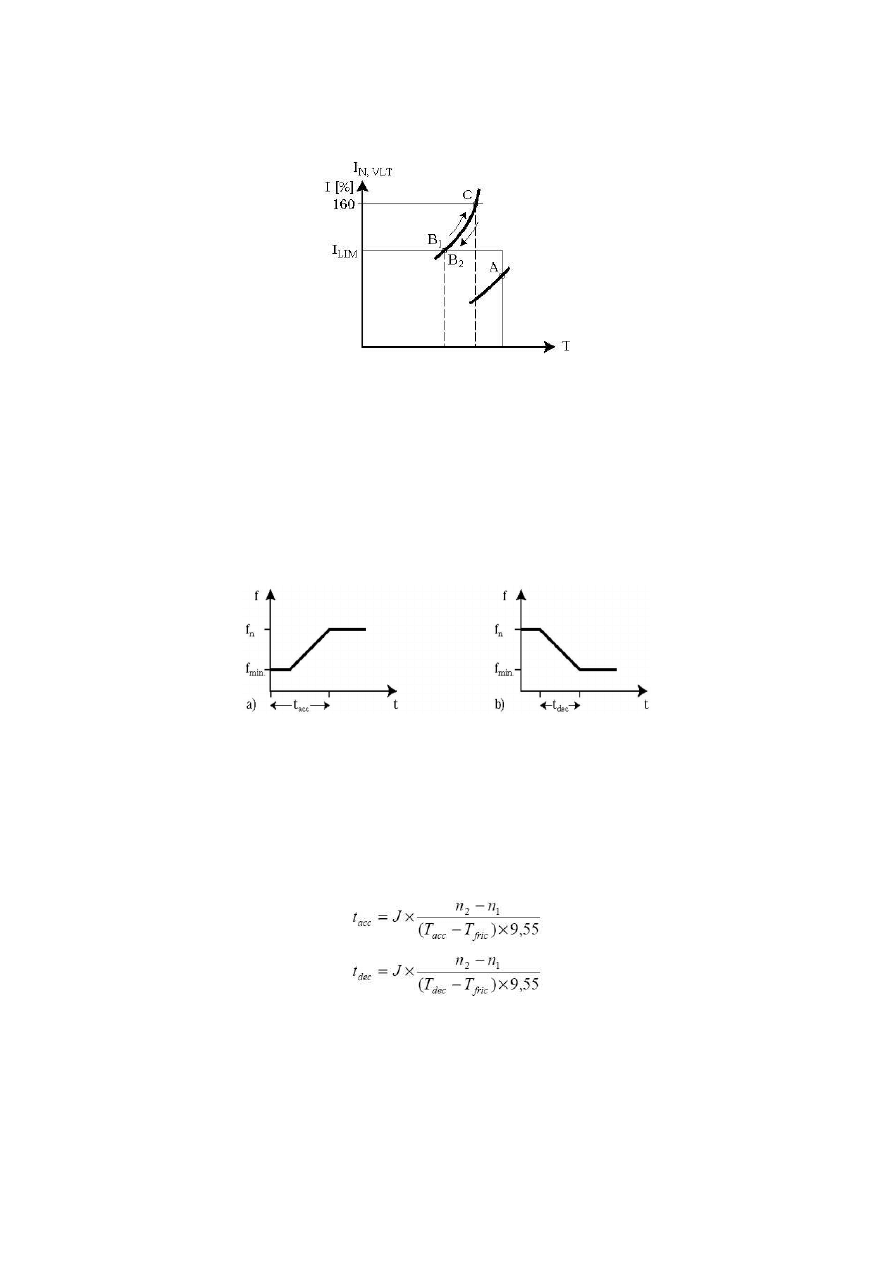
Rys. 17. Pr d silnika mo e przez krótki czas przekroczy dopuszczaln warto okre lon
nastawami przemiennika cz stotliwo ci.
Minimalne czasy zwi kszania i zmniejszania pr dko ci silnika
Czas zwi kszania pr dko ci, rozruchu silnika (ang. ramp up time, acceleration
time) okre la, kiedy nast pi osi gni cie maksymalnej pr dko ci silnika od chwili jego
startu. Czas ten oznaczany jest jako
acc
t
i bazuje zwykle na cz stotliwo ci nominalnej
silnika, np.
sek
t
acc
5
=
., co oznacza, e przemiennik osi gnie po 5 sekundach
cz stotliwo synchroniczn pracy silnika od
Hz
0
do
Hz
50
.
Rys. 18. Minimalne czasy przyspieszania i zwalniania pr dko ci obrotowej silnika.
Czas zmniejszania pr dko ci (ang. ramp down time, deceleranion time) -
hamowania silnika, wskazuje jak szybko silnik od pr dko ci nominalnej mo e osi gn
pr dko zerow . Oznaczany jest jako
dec
t
.Mo liwe jest bezpo rednie przej cie od
przyspieszania do hamowania, poniewa obroty silnika zawsze uzale nione s od
cz stotliwo ci napi cia na wyj ciach mocy falownika przemiennika cz stotliwo ci. Je eli
moment bezwładno ci wału silnika jest znany, optymalne czasy przyspieszania
i hamowania mog by obliczone wg równa :
gdzie: J - moment bezwładno ci wału silnika,
fric
T
- moment oporów tarcia układu,
acc
T
- moment przyspieszaj cy,
dec
T
- moment hamuj cy, który wyst puje, gdy
pr dko zadana – referencyjna jest redukowana,
1
n
i
2
n
pr dko ci przy
cz stotliwo ci
1
f
i
2
f
.
Je li przemiennik cz stotliwo ci na pewien krótki czas zostanie przeci ony,
wtedy momenty silnika w czasie przyspieszania i zmniejszania jego pr dko ci obrotowej
d
do warto ci znamionowej. W praktyce czasy przyspieszania i hamowania s
identyczne.
Hamowanie dynamiczne
Kiedy pr dko jest zmniejszana silnik pracuje jako generator i hamuje.
Efektywno hamowania zale y od zastosowanej metody hamowania, wielko ci
i rodzaju obci enia silnika. Dla przykładu, przy hamowaniu maszyn synchroniczn
silnika obci onego du mas bezwładn : wirówki, młyny kulowe, du a ilo energii
jest przekazywana przez silnik do sieci zasilania.
Silniki podł czone bezpo rednio do sieci zasilaj cej dostarczaj moc hamuj c
(odzyskow ) bezpo rednio do niej.
Je eli silnik jest sterowany przez przemiennik cz stotliwo ci, moc wytworzona
przez silnik w czasie hamowania jest dostarczana i gromadzona w obwodzie po rednim
DC przemiennika. Gdy moc hamuj ca (odzyskowa) przewy sza straty mocy
w przemienniku, napi cie stałe kondensatorów w obwodzie po rednim wzrasta.
Napi cie w obwodzie po rednim mo e wzrasta do czasu, a nast pi
zatrzymanie pracy przemiennika wskutek zadziałania układów zabezpieczaj cych,
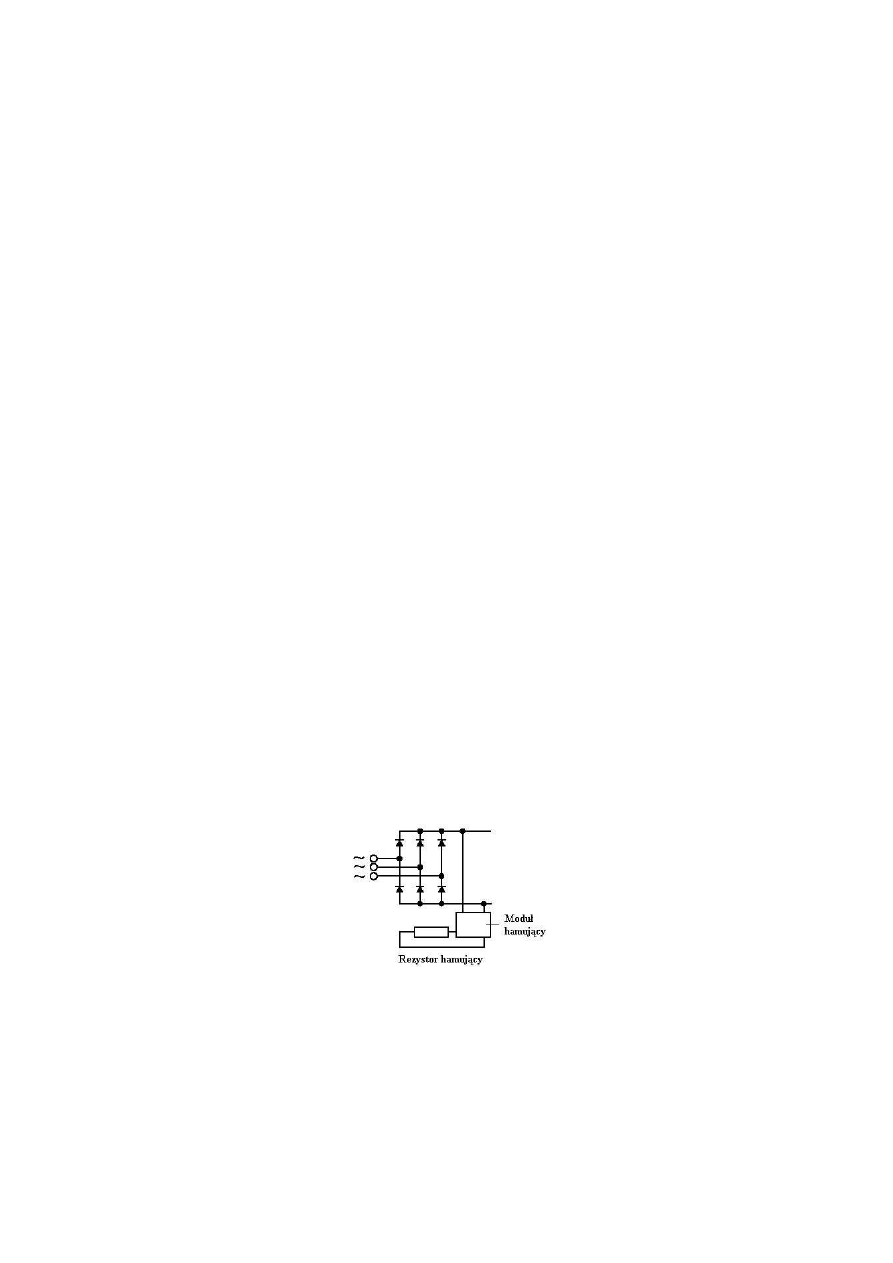
czasami jest konieczne umieszczenie modułu obci enia obwodu po redniego
przemiennika, nazywanego modułem hamuj cym i rezystora zewn trznego do
absorbowania mocy wytworzonej podczas hamowania. U ycie modułu hamowania
i rezystora hamuj cego umo liwia szybkie hamowanie układów z du ym obci eniem,
rys 19. Jednak e mo e to spowodowa problemy z odprowadzaniem ciepła. Alternatyw
jest jednostka hamuj ca umo liwiaj ca przekazywanie energii do sieci zasilania.
Rekuperacja energii do sieci zasilaj cej w przemiennikach z niesterowanym
prostownikiem jest mo liwa jedynie, poprzez moduły hamowania odzyskowego
współpracuj ce z obwodem po rednim przemiennika, które przetwarzaj napi cie stałe
na przemienne o parametrach sieci zasilania. Przykładowo moc hamowania mo e by
przesyłana do sieci - rysunek 20, np. przez dodatkowy falownik w przeciw równoległym
poł czeniu do niesterowanego lub sterowanego prostownika.
Rys.19. Układ hamowania rezystancyjnego silnika: moduł hamuj cy (przerywacz pr du - ang.
chopper) i rezystor.
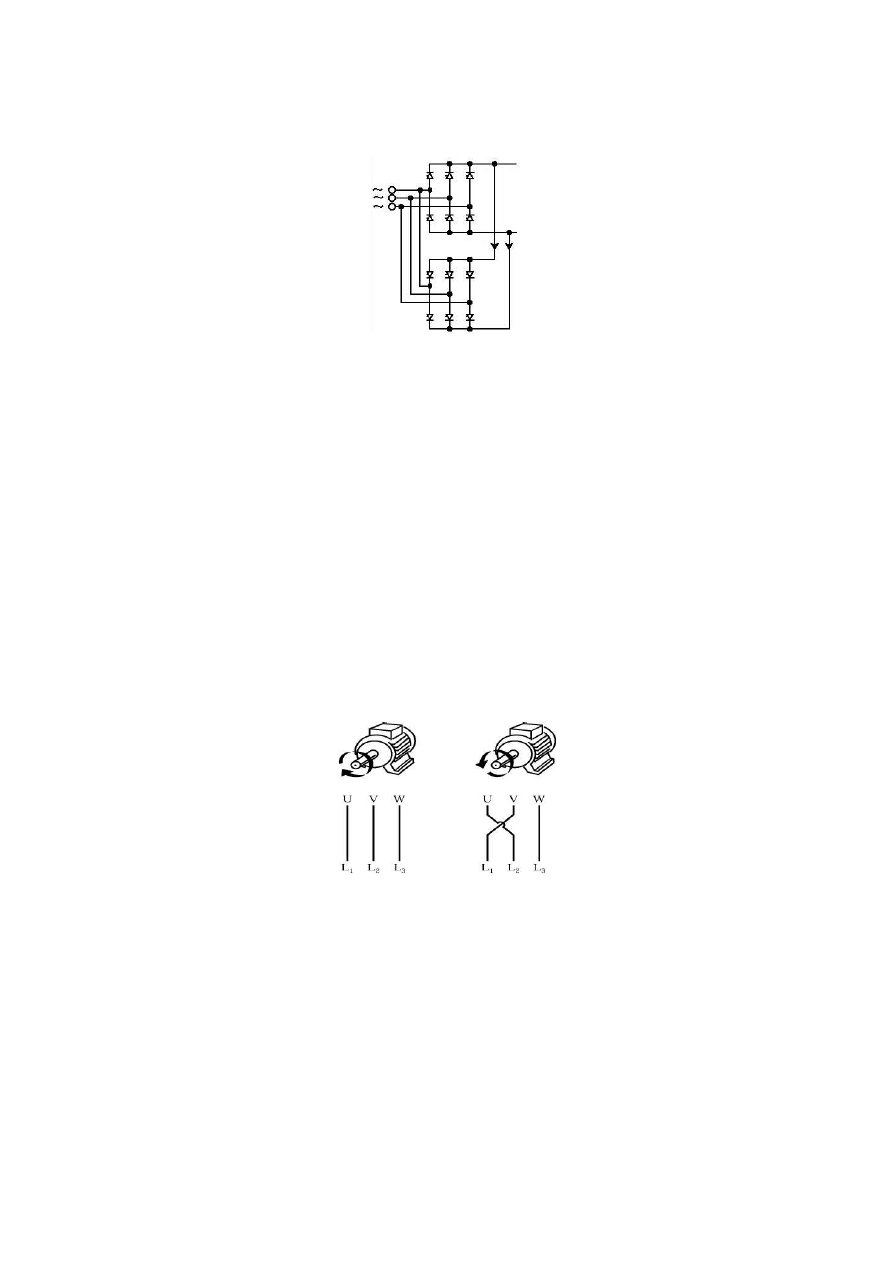
Rys. 20. Układ hamowania odzyskowego: falownik przeciw równolegle doł czony do
sterowanego prostownika przemiennika cz stotliwo ci.
Innym rodzajem hamowania jest hamowanie pr dem stałym (ang. DC brake).
Polega ono na przył czeniu pomi dzy dwie fazy pracuj cego silnika napi cia stałego,
które wytwarza w uzwojeniach silnika stałe pole magnetyczne w stojanie. Moc
hamowania wydziela si w postaci ciepła w silniku, dlatego mo liwe jest jego
przegrzanie. Aby do tego nie dopu ci zaleca si stosowanie tego hamowania
w zakresie mniejszych pr dko ci wówczas pr d silnika nie b dzie przekraczał jego
warto ci. Podstawowym ograniczeniem hamowania pr dem stałym jest przede
wszystkim warto stałego napi cia hamowania i czas hamowania.
Zmiana kierunku wirowania
Kierunek wirowania w silnikach asynchronicznych jest okre lony przez kolejno
doł czonych faz napi cia zasilania. Je eli dwie fazy zostan mi dzy sob zamienione
zmieni si kierunek wirowania wału silnika. Wi kszo silników jest produkowana tak, e
wał obraca si zgodnie ze wskazówkami zegarka, je eli jest poł czony według
nast puj cego schematu:
Rys. 21. Zmiana kierunków obrotów przez zmian kolejno ci faz: kierunek normalny - kierunek
rewersyjny.
Kolejno faz na wyj ciach mocy przemiennika cz stotliwo ci jest wła ciwa dla
pracy w normalnym kierunku wirowania wału silnika niezale nie od kolejno ci faz
napi cia zasilania.
Przy współpracy przemiennika z silnikiem przemiennik mo e programowo –
w sposób elektroniczny, dokonywa zmiany kolejno ci faz zasilania silnika. Zmiana
kierunku jest realizowana przez zadanie sygnału referencji o przeciwnej polaryzacji lub
cyfrowy sygnał wej ciowy. Je eli od silnika wymagany jest okre lony kierunek wirowania
wału silnika przy pierwszym rozruchu, wtedy wa na jest informacja o nastawach
fabrycznych przemiennika. Poniewa przemiennik cz stotliwo ci ogranicza pr d silnika
do ustalonej - zwykle nominalnej warto ci, dlatego zmiana kierunku wirowania wału
mo e by realizowana o wiele cz ciej ni w silniku zasilanym bezpo rednio do sieci.
Rys. 22. Moment hamuj cy przemiennika podczas zmiany kierunku obrotów.
Czasy rozruchu i hamowania silnika
Wszystkie przemienniki maj funkcje programowania warto ci czasów rozruchu
i hamowania, zapewniaj ce łagodne warunki pracy układu nap dowego. Czasy te s
zadawane i gwarantuj , e szybko wirowania wału silnika wzrasta lub maleje wg
ustalonej wst pnie warto ci.
Rys. 23. Ustawiany przez u ytkownika czas zwi kszania i zmniejszania pr dko ci silnika.
Je eli zadane czasy zmian pr dko ci silnika s zbyt małe, wtedy w pewnych
sytuacjach silnik nie b dzie nad ał ze zmian pr dko ci. Prowadzi to do wzrostu pr du
silnika a do osi gni cia jego warto ci granicznej. W przypadku zbyt krótkiego czasu
zmniejszania pr dko ci (ang. rampdown time) t
-rd
, napi cie stałe w obwodzie po rednim
mo e wzrosn do takiego poziomu, e zadziała obwód ochronny przemiennika
i zostanie on wył czony. Optymalny czas zwi kszania i zmniejszania pr dko ci silnika
mo e by obliczany na podstawie poni szych wzorów:
gdzie: t
ramp-up
- czas rozp dzania wału silnika od warto ci zero do warto ci znamionowej,
t
ramp-down
- czas zwalniania pr dko ci wału silnika od pr dko ci znamionowej do zera,
n
N
- obroty znamionowe w obr./min,
T
N
- moment znamionowy,
T
fric
- moment oporów tarcia układu,
J - moment bezwładno ci układu nap dowego.
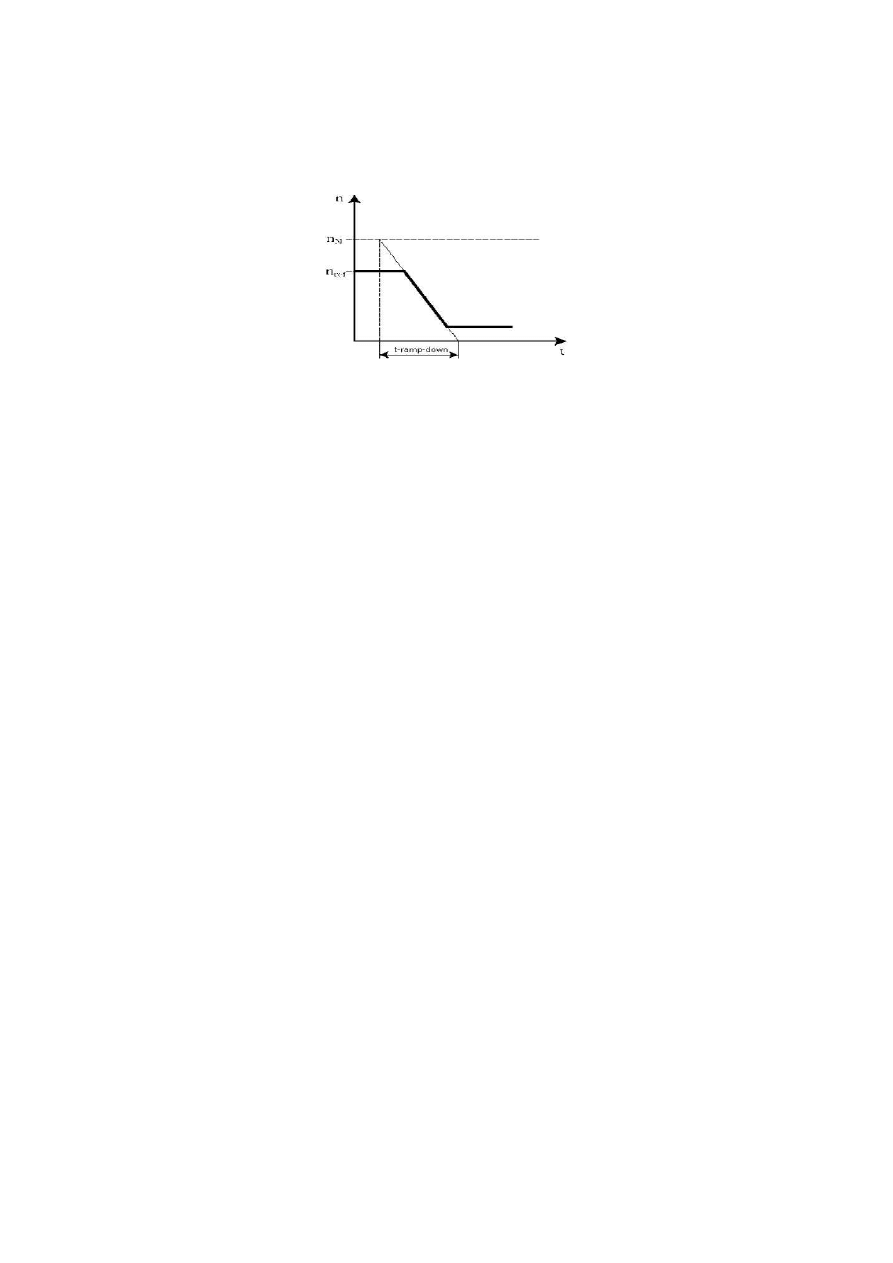
Czasy narastania s zwykle wyznaczane na podstawie nominalnej pr dko ci silnika
Rys. 24. Sposób wyznaczania czasów zwi kszania i zmniejszania pr dko ci wału silnika.
Monitorowanie nap du
Przemienniki mog monitorowa sterowany nap d i interweniowa w przypadku
wyst pienia zakłóce . To monitorowanie mo e dotyczy trzech obszarów zagadnie :
urz dzenia produkcyjnego, silnika i przemiennika cz stotliwo ci.
Monitorowania urz dzenia produkcyjnego opiera si na informacji o warto ciach:
cz stotliwo ci wyj ciowej, pr du i momentu obci enia silnika.
Pewna grupa tych parametrów granicznych mo e zosta zapisana i je eli zostan
one przekroczone zadziała funkcja kontroli przemiennika. Bazuj c na tych wielko ciach
mog by ustawione okre lone ich ograniczenia i ich przekroczenie spowoduje
okre lon reakcj układu sterowania przemiennika.
Te granice mog dotyczy dopuszczalnych minimalnych pr dko ci silnika,
dopuszczalnego maksymalnego pr du silnika lub dopuszczalnego momentu obci enia.
Je li warto ci graniczne zostan przekroczone przemiennik mo e, np.: by
zaprogramowany na wysłanie sygnału ostrzegawczego, zmniejszenie pr dko ci
obrotowej silnika lub zatrzymanie go - tak szybko jak to mo liwe.
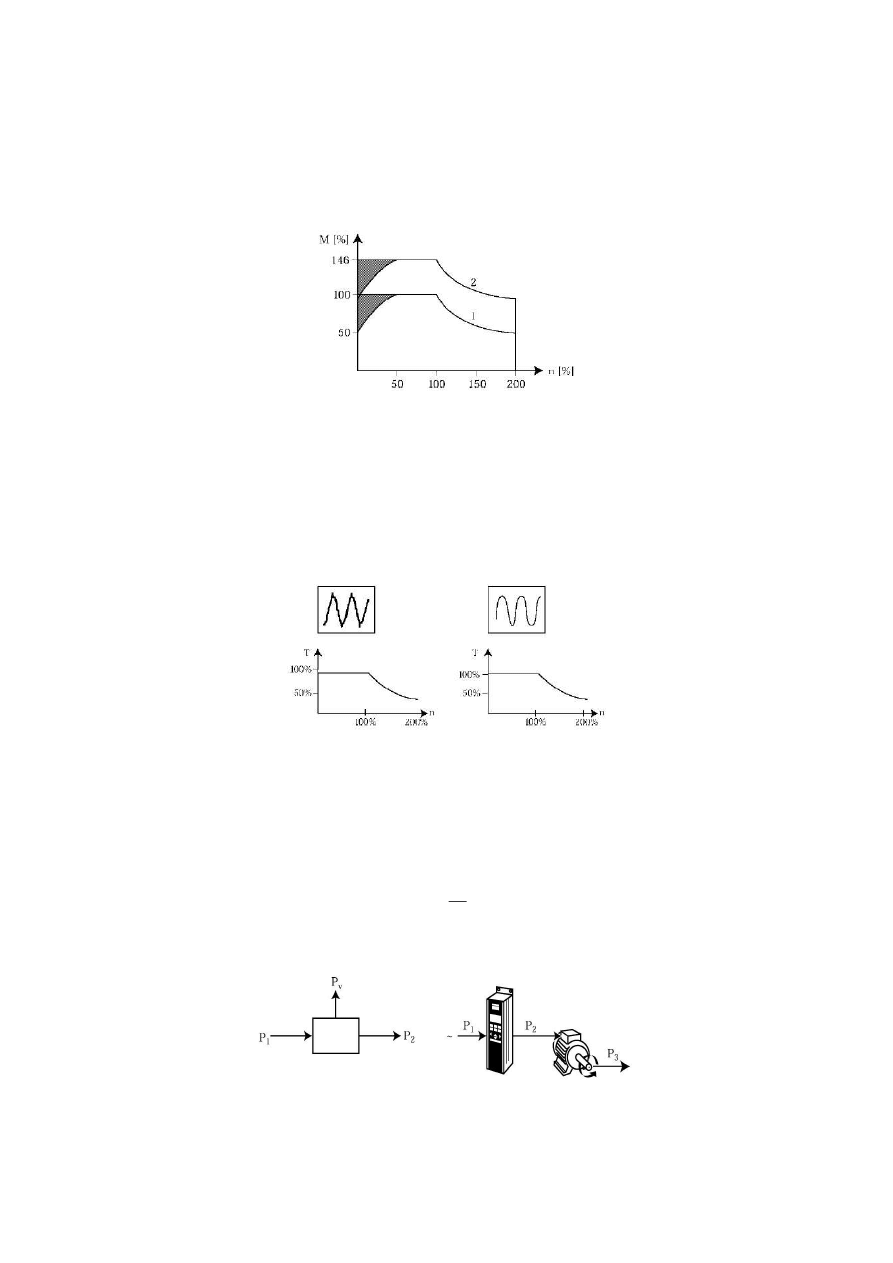
Wpływ obci enia na nagrzewanie si silnika
Gdy silnik jest poł czony z przemiennikiem cz stotliwo ci to w czasie jego pracy
musi by utrzymywana wła ciwa temperatura, a wpływ na to maj czynniki:
• je li nast puje spadek pr dko ci silnika, to jest słabsza wentylacja uzwoje ,
• je li wyst pi niesinusoidalny pr d silnika, to spowoduje wytworzenie zwi kszonej
temperatury uzwoje .
Przy niskich obrotach silnika jego wentylator nie jest zdolny zapewni
wystarczaj cej ilo ci powietrza do odbioru ciepła. Ten problem powstaje, je eli moment
obci enia jest stały w całym obszarze regulacji pr dko ci silnika. Ta zmieszona
wentylacja decyduje o dopuszczalnej warto ci stało momentowego obci enia silnika.
Je eli silnik pracuje w obszarze regulacji pr dko ci ze 100% momentem obci enia
i jego pr dko obrotowa jest mniejsza od połowy jego pr dko ci nominalnej, wtedy
silnik potrzebuje dodatkowego powietrza dla zapewnienia wła ciwego chłodzenia, szary
obszar na rys. 25).
Alternatywnie stopie obci enia silnika mo e by zmniejszony przez dobranie
wi kszego silnika. Jednak e nale y zwróci uwag na to, e nie mo e by dobrany za
du y silnik do danego przemiennika.
Rys. 25. Obszary zapotrzebowania na wymuszone chłodzenie dla silnika dopasowanego
i przewymiarowanego w stosunku do obci enia:
wykres 1 - silnik o mocy nominalnej np. 15kW,
wykres 2 - silnik przewymiarowany np. 22kW.
Je eli pr d silnika nie jest sinusoidalny, to nie mo e on by obci any w 100% przez
cały czas pracy, poniewa wy sze harmoniczne pr du powoduj zwi kszone straty i tym
samym zwi kszan temperatur silnika.
Rys. 26. Pr d niesinusoidalny silnika powoduje powstawanie dodatkowych strat.
Sprawno urz dze układu nap dowego
Sprawno jest definiowana jako stosunek czynnej mocy oddanej
2
P
do czynnej
mocy pobranej
1
P
:
1
2
P
P
=
η
.
Ró nica miedzy P
1
i P
2
jest definiowana jako moc strat
v
P
, np. jest to moc
wydzielana w postaci ciepła w danym urz dzeniu.
Rys. 27. Moc czynna dostarczona, moc strat i moc czynna oddana - sprawno .
Sprawno mo e by oddzielnie wyznaczona dla przemiennika cz stotliwo ci
i silnika oraz dla układu nap dowego: przemiennik - silnik (sprawno systemu).
Sprawno przemiennika:
1
2
P
P
, Sprawno silnika:
2
3
P
P
, Sprawno systemu:
1
3
P
P
. Na
poni szych wykresach przedstawiono do wiadczalnie wyznaczone charakterystyki
sprawno ci urz dze układu nap dowego.
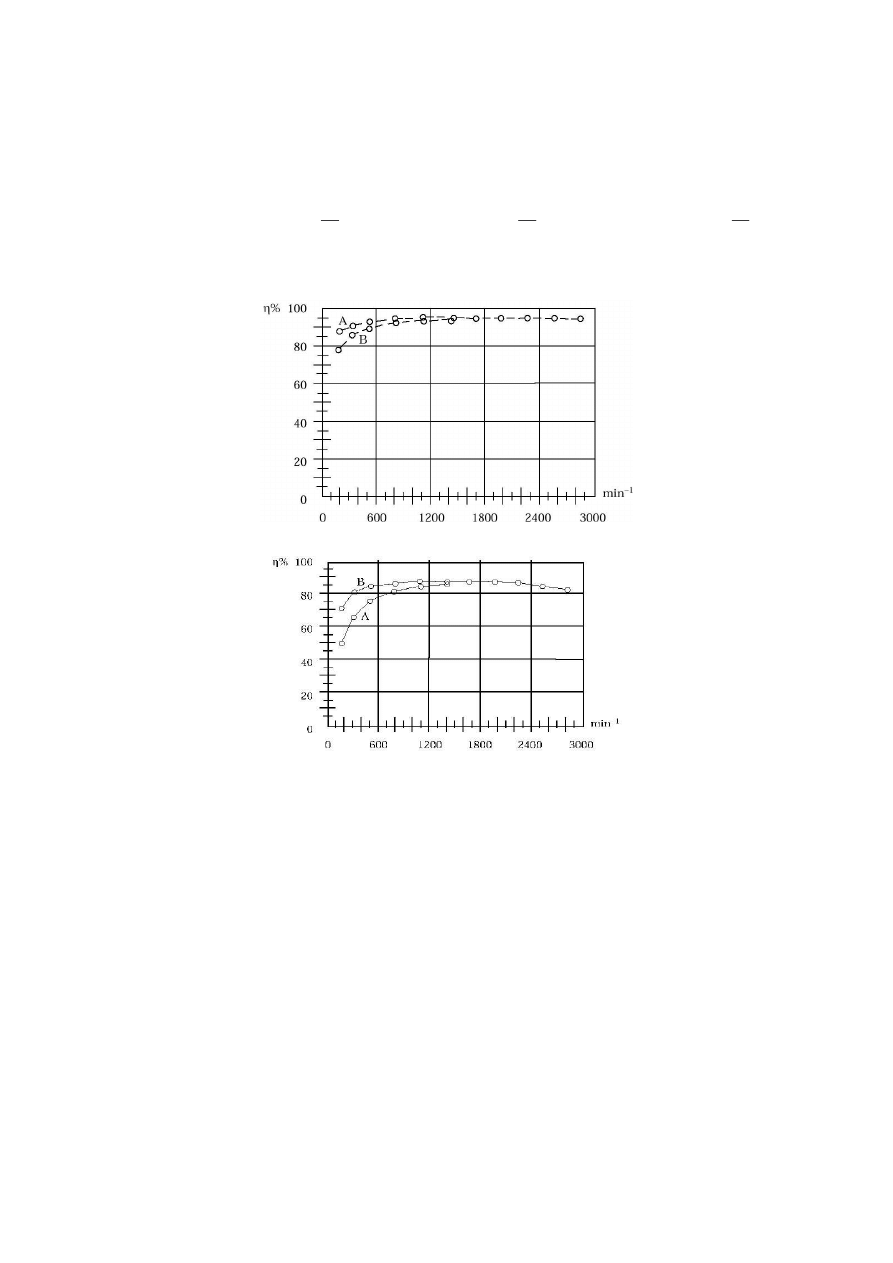
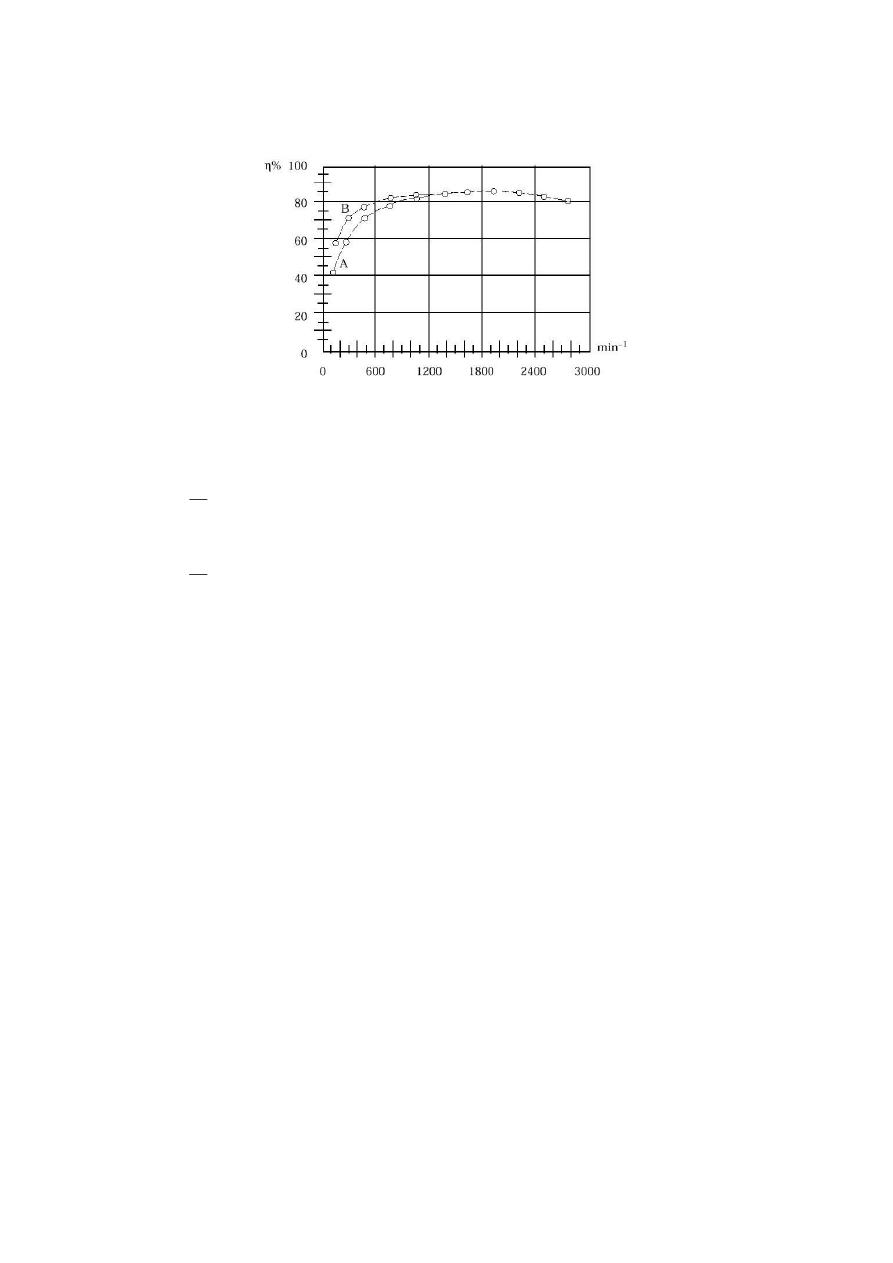
Rys. 28. Sprawno przemiennika cz stotliwo ci przy obci eniu 100%(A) i 25%(B) obci eniu.
Rys. 29. Sprawno typowego silnika zasilanego z przemiennika cz stotliwo ci przy obci eniu
100%(A) i 25%(B).
Wykresy pokazuj ze sprawno silnika ma bardzo podstawowy wpływ na
sprawno systemu. Sprawno przemiennika cz stotliwo ci jest wysoka dla du ych
i małych poziomów obci enia w całym zakresie regulacji pr dko ci silnika. Mo na te
zauwa y , e sprawno ci s najni sze przy małych pr dko ciach. Jednak e to nie
znaczy, e całkowite straty s najwi ksze przy tych pr dko ciach.
Rys. 30. Sprawno całego układu nap dowego: przemiennik – silnik
przy obci eniu 100%(A) i 25%(B)
Dane i obliczenia do rysunku 30.
1.
min
/
800 obr
n
=
,
W
P
9628
3
=
,
%
3
,
77
=
η
.
W
P
P
4
,
12455
3
1
=
=
η
,
W
P
P
P
v
4
,
2827
2
1
=
−
=
.
2.
min
/
500 obr
n
=
,
W
P
1500
3
=
,
%
70
=
η
,
W
P
P
2143
3
1
=
=
η
,
W
P
P
P
v
643
2
1
=
−
=
Wysoka sprawno przemienników cz stotliwo ci daje wiele korzy ci:
wi ksza sprawno powoduje mniejsze straty cieplne systemu, które musz by
usuni te z instalacji. Jest to wa ne, gdy przemiennik jest zintegrowany z panelem
sterowania,
mniejsze straty cieplne wyst puj w półprzewodnikowych zaworach mocy
falownika i dławikach przemiennika cz stotliwo ci co wpływa na zmniejszenie
zu ywania si tych elementów - zwi ksza si ich ywotno , a przez to jest
dłu szy okres bezawaryjnego u ytkowania przemiennika,
wy sza sprawno to ni sze zu ycie energii.
Wyszukiwarka
Podobne podstrony:
Materiały pomocnicze do ćwiczenia nr 3 co powinien wiedzieć wnioskodawca (1)
Materiały do ćwiczeń nr 1
Materiały do cwiczenia nr 5
Materiały do ćwiczeń nr 2
Materiały do cwiczenia nr 11
Materiały do ćwiczeń nr 3
INSTRUKCJA DO ĆWICZENIA NR 10, Elektrotechnika, dc pobierane, pnom wimir, PNOM, Materiałki, Materiał
Materiały do ćwiczeń nr 1
Materiały do cwiczenia nr 5
Materiały do ćwiczeń nr 2
Materialy pomocnicze do cwiczen Statystyka cz I
Fwd materialy edukacyjne do cwiczen z rachunkowosci, 3 Pasywa, T: Pasywa
Fwd materialy edukacyjne do cwiczen z rachunkowosci, 7 Dokumentacja, 6
MATERIAŁY POMOCNICZE DO ĆWICZEŃ z biochemii
ZAKRES MATERIAŁU OBOWIĄZUJĄCY DO KOLOKWIOUM NR 1
Protokół do ćwiczenia nr 9
więcej podobnych podstron