CZĘŚĆ I
Pytanie
Odpowiedź
1
Splatanie sygnałów w dziedzinie czasu, odpowiedź dziedzinie
pulsacyjnej
Dzielenie widma przez 2pi
2
Jeżeli x(t) i X(jw) tworzą pary transformat Fouriera to
x(t)=X(jw)
3
Jeżeli x(t) i X(jw) tworzą pary, to parą są również
x(t-t0) oraz X(jw) * e^(-jwt0)
4
Różniczkowanie oryginału odpowiedzi w przekaz
mnożenie trans po s
5
Jeśli istnieje granica lim f(t) dla t -> nieskończoność to jest ona wtedy
w granicy w s
lim sF(s) s-> 0
6
Dziedzina transmitancji Laplace'a przez s odpowiada w dziedzinie
czasu
Całkowaniu po t
7
Bieguny transmitancji G(s) w postaci funkcji wymiernej to
pierwiastki mianownika transformacji
8
Jeśli transformacja laplacea posiada wył. pojedynczy biegun sk, to jej
oryginał jest kombinacją liniową syngału w postaci
F(s)=e^(-sk*t)
9
Transformacja Laplace'a funkcji f(t)=e^(-at) * 1(t) wynosi
F(s)= e^(1/(a+s))
10
Modelowanie dowolnego linowego układu dynamicznego opisuje
liniowe równanie różniczkowe
11
Szeregowy układ z rezystancją R i pojemności elektrycznej C jest
układem
którego charakter zależy od
zdefiniowanego sygnału wejściowego i
wyjściowego
12
Transformacja operatorowa G(s) to
iloraz transformat odpowiedzi układu i
wymuszenia przez zerowych warunki
początkowych
13
Odpowiedz impulsu g(t) nazywa się
pochodna odpowiedzi skokowej h(t)
14
W odpowiedzi skokowej układu inercyjnego o transformacie
G(s)=K/(1+sT) K decyduje o
wartości w stanie ustalonych
15
Charakterystyka amplitudowo-fazowa to wykres
G(jw) w osi P(w) i Q(w)
16
Częstotliwość transformaty G(jw) rzeczywista i urojona są funkcją
pulsacji od
parzysta i nieparzysta
17
|G(jw)|^2 możemy traktować jako
styczny współczynnik wzmocnienia
18
Którą z podanych wartości jest najbliższa do wartości 20log10sqrt(2)
3dB
19
Kryterium stabilności Nyquista pozwala określić stabilność
układ zamknięty na podstawie
przebiegu charakterystyki
amplitudowo-fazowej układu
otwartego
20
Układ oscylacyjny II rzędu to układ
który ma dwa sprzężenia zespolone
bieguny transmitancji
CZĘŚĆ II
Pytanie
Odpowiedź
1
?
B
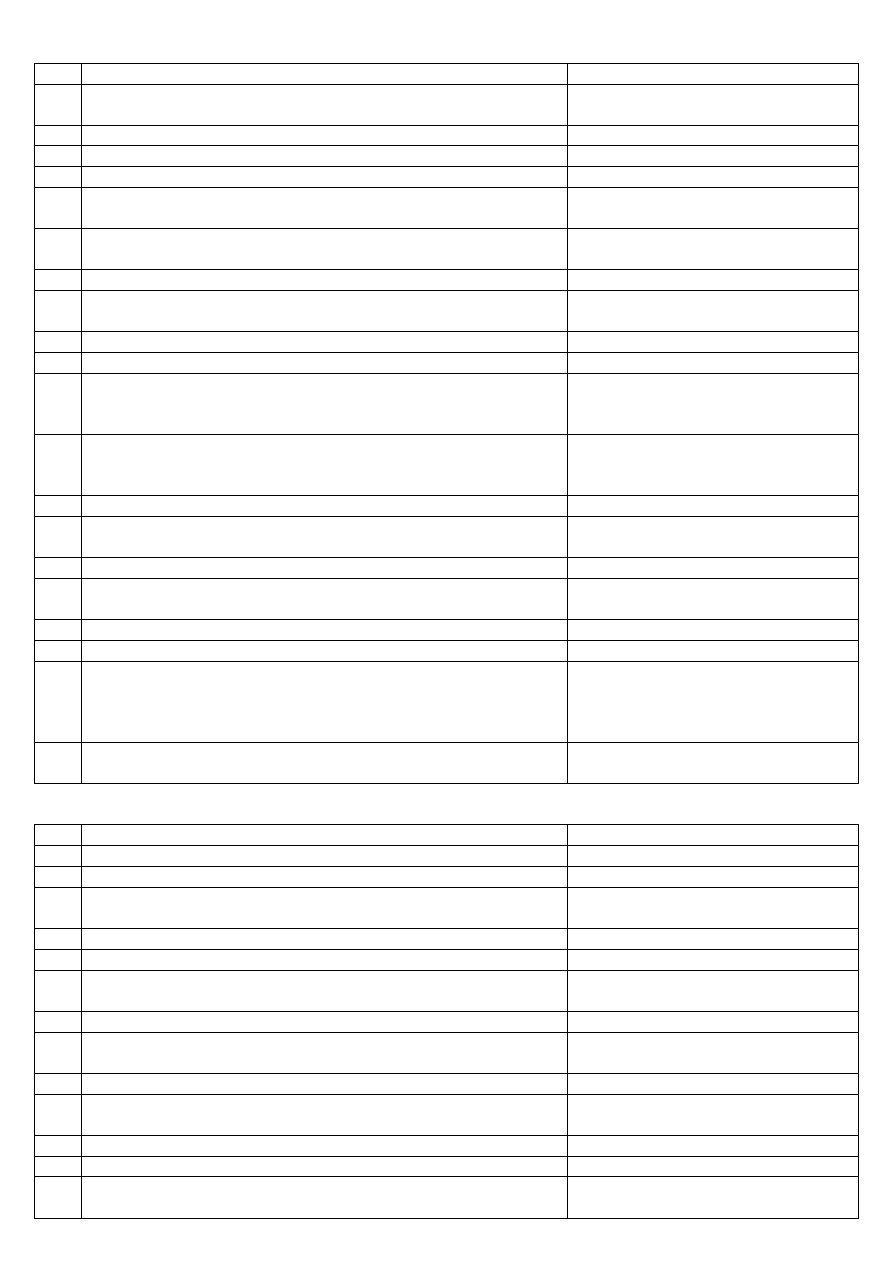
2
Zapewne ilustracja obiektu z członów lub transmitancja z e^x
inercyjny 2 rzędu z opóźnieniem
3
Obiekt statyczny
posiada odpowiedz skokową dążącą do
wartości skończonej
4
?
s+1 --> s s/s+1
5
Ile wynosi odpowiedź do impulsowego
s1=-4, s2=-2
6
Zadaniem układu regulacji:
minimalizacja wartości sygnału uchybu
regulatora
7
?
Z-N styczne i odpowiedzi
8
Która z metod nie umożliwia wyznaczyć nastawę regulację PI dla
obiektu inercyjnego i rzędu
oscylacyjna Z-N
9
Wartość metody Z-N
0,15<Tm/To<0,6
10
Co to jest uchyb
różnica pomiędzy sygnałem na wyjściu i
wejściu układu reg
11
Transmitancja rzeczywistego PID:
G(s)=Kp+(Kp/sTi) +(Kp*Td*s)/Ti*s+1
12
Jaka jest wartość uchybu w układzie reg. automatycznej
e(t)=0
13
Do oceny jak reg. na podstawie przebiegu odpowiedzi układu nie
używa się parametru
czasu martwego
14
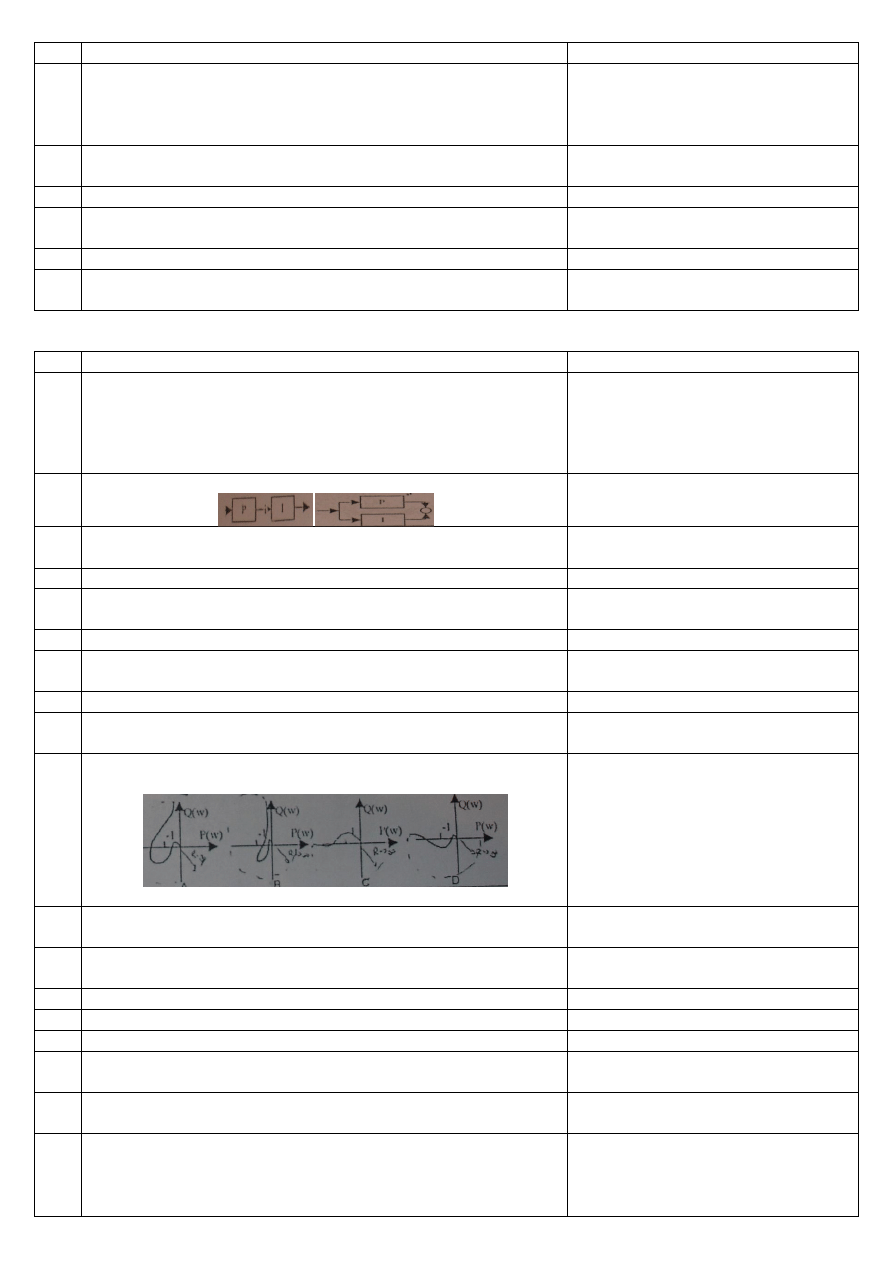
Wybrać wykres regulacji członu całkującego dla sygnału
D
15
Którą zależność stosuje się do oceny jak reg. według kryterium
IE całka e(t)dt
ISE calka e^2(t)dt
IEA całka |e(t)dt|
IEATE całka t(e(t)dt)
16
Jaki element nieliniowy wykorzystuje się reg. dwu-nastawnym
histereza
17
Kryteria oscylacyjne ZN
B
18
Jaki element nieliniowy występuje w układzie .... na wyjściu obiektu
jest przebiegi wyjściowy
nasycenie
19
Zadaniem członu i w PID jest
Likwidacja uchybu w stan ustalony
20
WINDUP można skompensować
nakładając ograniczenie na wyjściu
członu I w regulatorze
MIX
Pytanie
Odpowiedź
1
Które z wymienionych wielkości należą do parametrów nastawialnych
uniwersalnych regulatorów przemysłowych:
Przeregulowanie,
czas regulacji,
wzmocnienie,
jeżeli stała czasowa jest nastawialna to:
czas zdwojenia, czas wyprzedzania
2
Jakie regulatory otrzymamy dla następujących dwóch połączeń:
I i PI
3
Dla układu z obiektem stabilnym wzrost wzmocnienia powoduje:
polepszenie dokładności i pogorszenie
stabilności
4
Odpowiedź skokowa członu inercyjnego I-go rzędu ma postać:
K(1-e^(-1/T))1(t)
5
Uchyb ustalony w układzie określa jego:
Dokładność,
wzmocnienie statyczne
6
Uchyb nadążania można sprowadzić dokładnie do zera przez
wprowadzenie członu całkującego
7
Uchyb nadążny URA, w przypadku regulacji stałowartościowej, można
sprowadzić dokładnie do zera przez:
wprowadzenie regulatora PI
8
Płaszczyzna fazowa to:
rodzaj przestrzeni stanu
9
Jeżeli w URA zostanie zastosowany regulator, który poszerzy
pasmo przenoszenia to wpłynie to na:
skrócenie czasu regulacji
10
Układ sterowania jest stabilny to będzie on również stabilny po
zamknięciu w przypadku:
A i D
11
Spośród podstawowych członów dynamicznych zjawisko rezonansu
może zachodzić w:
tylko w członie oscylacyjnym
12
Algorytm regulacji PD należy stosować gdy:
przebiegi sygnałów układzie są szybkie
– o dużej częstotliwości
13
W układzie regulacji wejście regulatora stanowi:
sygnał uchybowi
14
Człon inercyjny I-go rzędu to inaczej:
czwórnik elektryczny
15
Transmitancja operatorowa to
rodzaj opisu dynamiki układów
16
Charakterystyki częstotliwościowe układów dynamicznych pozwalają
określić:
Wzmocnienie i przesunięcie fazowe w
funkcji częstotliwości
17
Jeżeli w URA zostanie zastosowany regulator, który zawęży pasmo
przenoszenia układu to wpłynie to na:
wydłużenie czasu regulacji
18
URA jest astatyczny względem zakłócenia, gdy:
•
jego transmitancja wyjściowa-
wejściowa posiada zera zerowe
•
jego transmitancja uchybowo-
zakłóceniowa posiada zera zerowe
19
W URA statycznym, stabilnym wzrost wzmocnienia powoduje:
20
Spadek wzmocnienia układu o 20dB na dekadę oznacza, że:
21
liniowy to taki układ, który:
22
Uchyb ustalony w układzie określa jego
23
Spośród podstawowych członów dynamicznych zjawisko rezonansu
może zachodzić w:
24
Charakterystyka częstotliwościowa ukłądu dynamicznego pozwalają
bezpośrednio określić: 1)
Równania stanu uzależniają:
25
)
(
2
)
(
)
(
2
01
,
0
s
U
s
Y
s
sY
=
−
26
Jakie parametry charakteryzują obiekt oscylacyjny II
27
Liniowy układ regulacji o transmitancji operatorowej:
28
Określić wskaźnik jakości regulacji związane z odpowiedzią skokową
regulacji o własnościach oscylacyjnych:
29
Do wyznaczania zapasu stabilności układu zamkniętego (układ
reulacji) posługujemy się:
30
Regulator o transmitancji operatorowej
31
Odpowiedź impulsowa o następującym przebiegu:
32
Bieguny transmitancji operatorowej stabilnego układu regulacji
znajdują się
W URA statycznym, stabilnym wzrost wzmocnienia powoduje:
polepszenie dokładności i pogorszenie
Spadek wzmocnienia układu o 20dB na dekadę oznacza, że:
wzmocnienie zmniejszyło się 20razy
przy dziesięciokrotnym zwięk
spełnia zasadę jednorodności i
superpozycji
Uchyb ustalony w układzie określa jego
Spośród podstawowych członów dynamicznych zjawisko rezonansu
tylko w czasie oscylacyjnym
Charakterystyka częstotliwościowa ukłądu dynamicznego pozwalają
wzmocnienie i przesunięcie fazowe w
funk
sygnał wyjściowy układu od zmiennych
(
s
G
Jakie parametry charakteryzują obiekt oscylacyjny II-go rzędu:
wzmocnieni
k
wspóczynni
n
−
−
−
ζ
ω
ad regulacji o transmitancji operatorowej:
Jest: na granicy stabilności
bieguny urojone (j8 i
Określić wskaźnik jakości regulacji związane z odpowiedzią skokową
regulacji o własnościach oscylacyjnych:
1)uchyb ust
t
d
, 3)czas narastania t
osiągnięcia wartości maksymalnej t
5)przeregulowanie M
Do wyznaczania zapasu stabilności układu zamkniętego (układ
1)logarytmicznymi charakt
(amplitudową i fazową) układu
Regulator o transmitancji operatorowej
Jest regulatorem: PID o parametrach
kp=100, Ti=0,2sek, Td=0,2sek
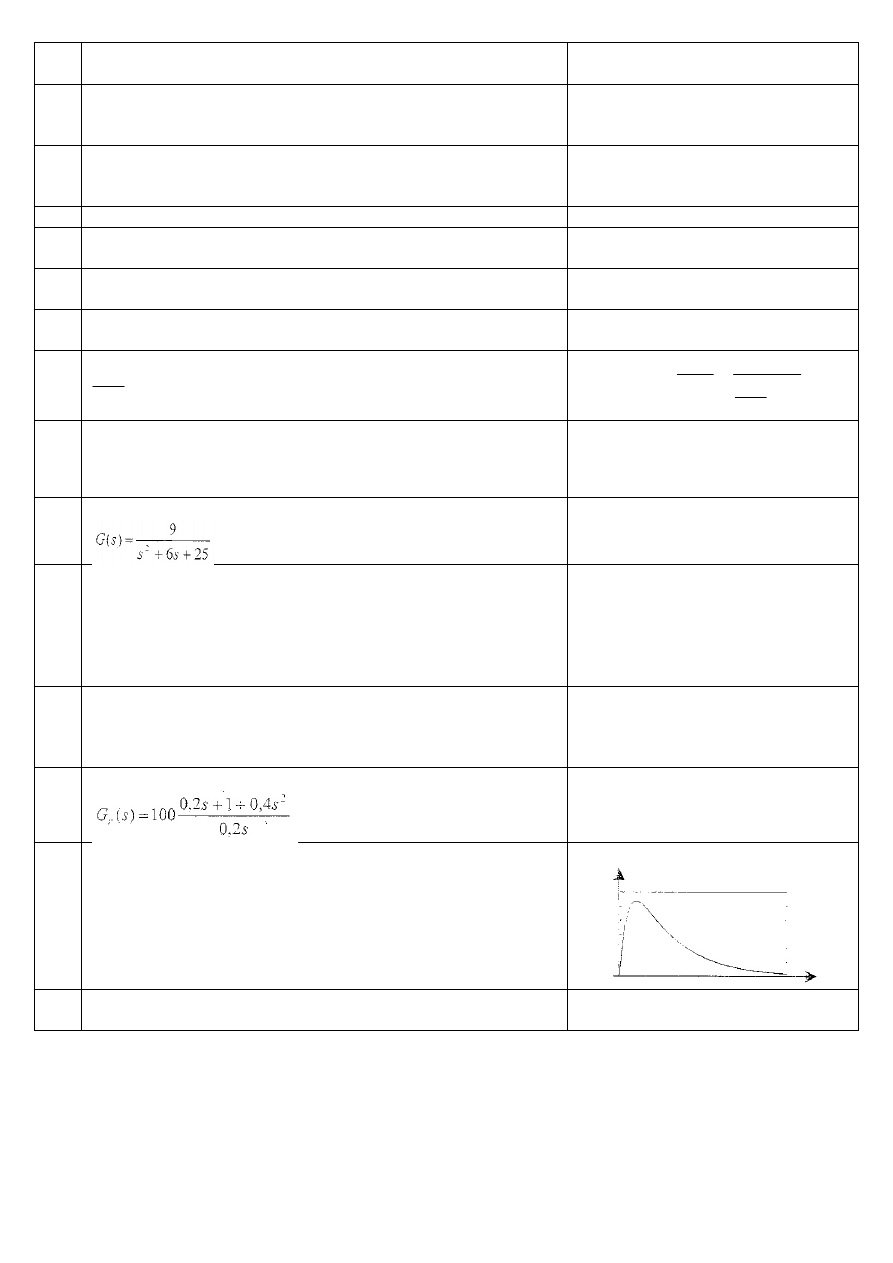
Odpowiedź impulsowa o następującym przebiegu:
Jest odpowiedzią układu:
Bieguny transmitancji operatorowej stabilnego układu regulacji
w lewej półpłaszczyźnie zmiennej
polepszenie dokładności i pogorszenie
zapasu stabilności
wzmocnienie zmniejszyło się 20razy
przy dziesięciokrotnym zwiększeniu
pulsacji
spełnia zasadę jednorodności i
superpozycji, da sie opisać r-niami
algebraicznymi
dokładność
tylko w czasie oscylacyjnym
wzmocnienie i przesunięcie fazowe w
funkcji częstotliwości
sygnał wyjściowy układu od zmiennych
stanu
1
2
01
,
0
2
)
(
)
(
)
−
=
=
s
s
U
s
Y
s
e
wzmocnieni
tumienia
k
wspóczynni
drgań
pulsacja
−
_
_
Jest: na granicy stabilności- dwa
bieguny urojone (j8 i -j8) symetryczne
względem osi Re.
1)uchyb ustalony e
u
, 2)czas opóźnienia
, 3)czas narastania t
r
, 4)czas
osiągnięcia wartości maksymalnej t
p
,
5)przeregulowanie M
p
, 6)czas regulacji
t
s
.
1)logarytmicznymi charakterystykami
(amplitudową i fazową) układu
zamknietego.
Jest regulatorem: PID o parametrach
kp=100, Ti=0,2sek, Td=0,2sek
st odpowiedzią układu: stabilnego
w lewej półpłaszczyźnie zmiennej
zespolonej s
Wyszukiwarka
Podobne podstrony:
opracowane Notatek pl id 321371 Nieznany
projekt sr tr 2014 id 398557 Nieznany
MNM 8 2014 id 304166 Nieznany
matura probna 2014 3 id 288983 Nieznany
opracowanie et cw4 id 338175 Nieznany
Czerwiec 2014 id 128517 Nieznany
Leki przeciwbolowe 2014 id 2661 Nieznany
opracowanie na kolosa id 338294 Nieznany
checklist 2014 id 111321 Nieznany
Kriogenika egzamin 2014 id 250 Nieznany
blad systematyczny 2014 id 8995 Nieznany (2)
Farmakologia 2014 id 168375 Nieznany
KWDM lab2 2014 id 256084 Nieznany
Opracowania pytan z SOiSK id 33 Nieznany
opracowanie cw 5 OS id 338135 Nieznany
Instrukcja bhp 2013 2014 id 215 Nieznany
Cwiczenia obliczenia 2014 id 12 Nieznany
opracowane pytania 1 19 id 3376 Nieznany
opracowanie pytan(35) id 338430 Nieznany
więcej podobnych podstron