1
REGULATORY
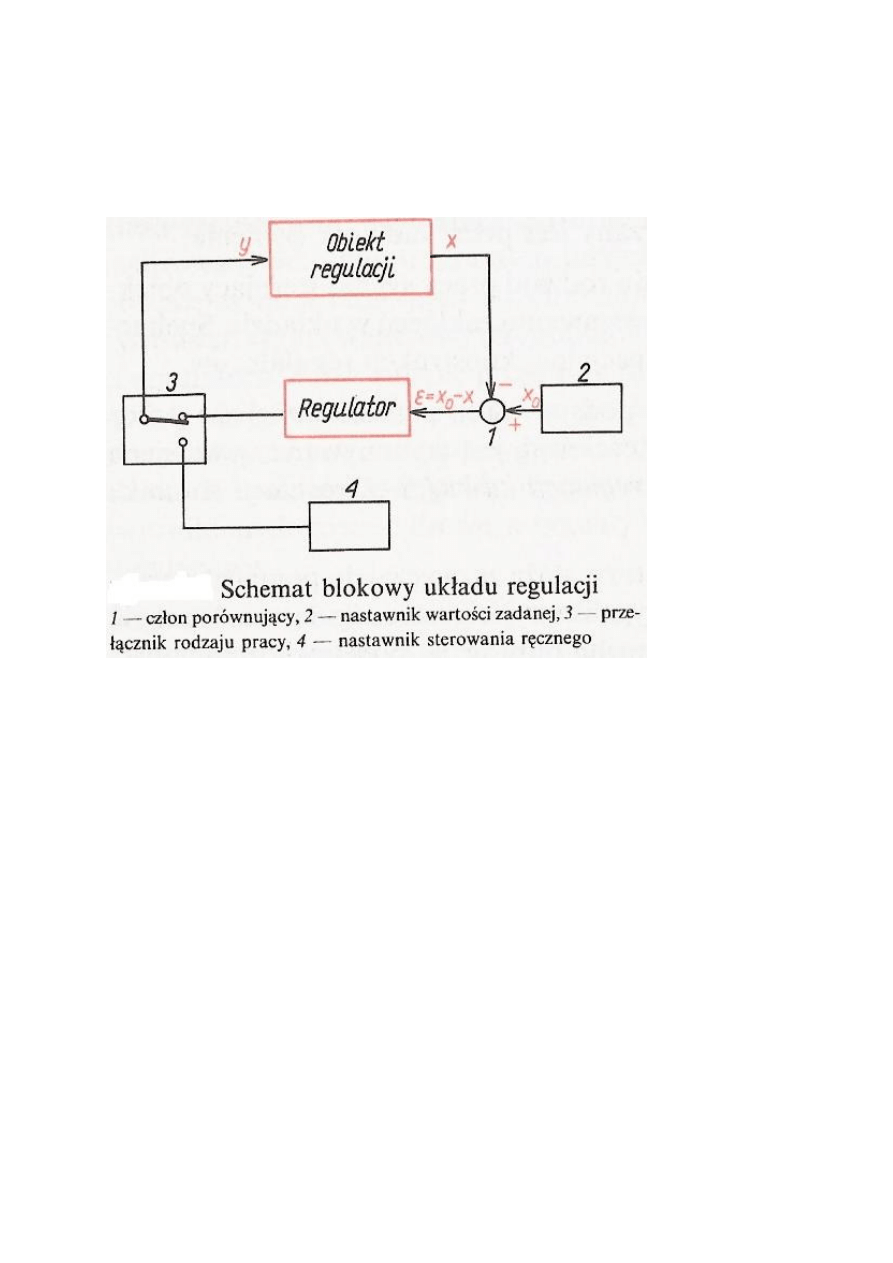
1. Podstawowe wiadomości o regulatorach
zadania:
• porównanie wielkości mierzonej wielkości regulowanej z
wartością zadaną
• wytworzenie sygnału wyjściowego o wartości zależnej od
wartości zależnej od wartości uchybu regulacji, czasu
występowania uchybu i szybkości jego zmian
• zapewnienie sygnałowi wyjściowemu postaci i mocy
potrzebnej do uruchomienia urządzeń wykonawczych

2
Od dokładności nastawienia wartości zadanej zależy
bezpośrednio dokładność regulacji.
rodzaje regulatorów ze względu na rodzaj energii pomocniczej:
• elektryczne
• pneumatyczne
• hydrauliczne
rodzaje regulatorów ze względu na postać sygnału
wyjściowego:
• z sygnałem nieciągłym (regulator typu „włącz/wyłącz,
cyfrowe)
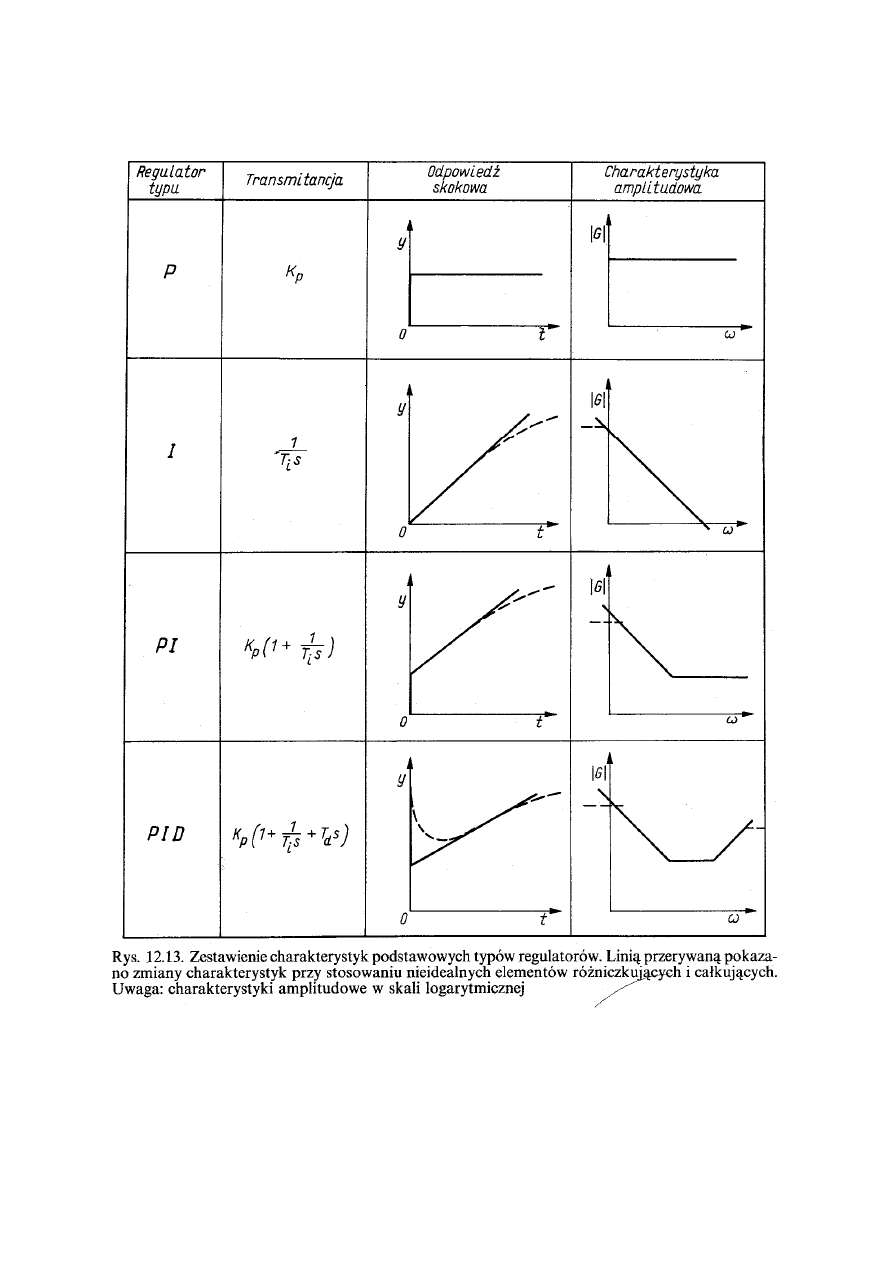
• z sygnałem ciągłym (P, PI, PD, PID)
rodzaje regulatorów ze względu zastosowanie:
• uniwersalne
• specjalizowane (np. tylko do regulacji temperatury)
•
3
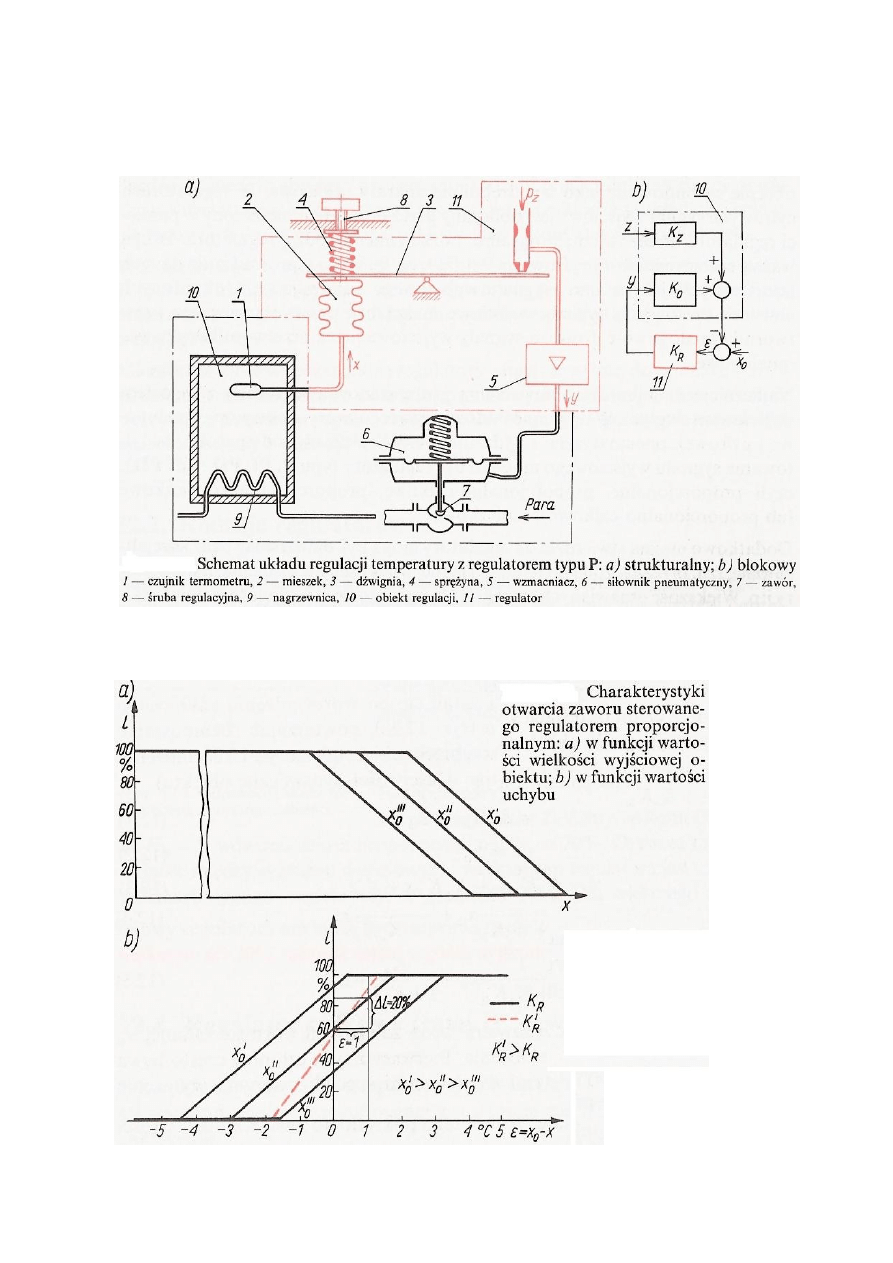
2. Regulator proporcjonalny (P)
schemat układu regulacji temperatury z regulatorem typu P
4
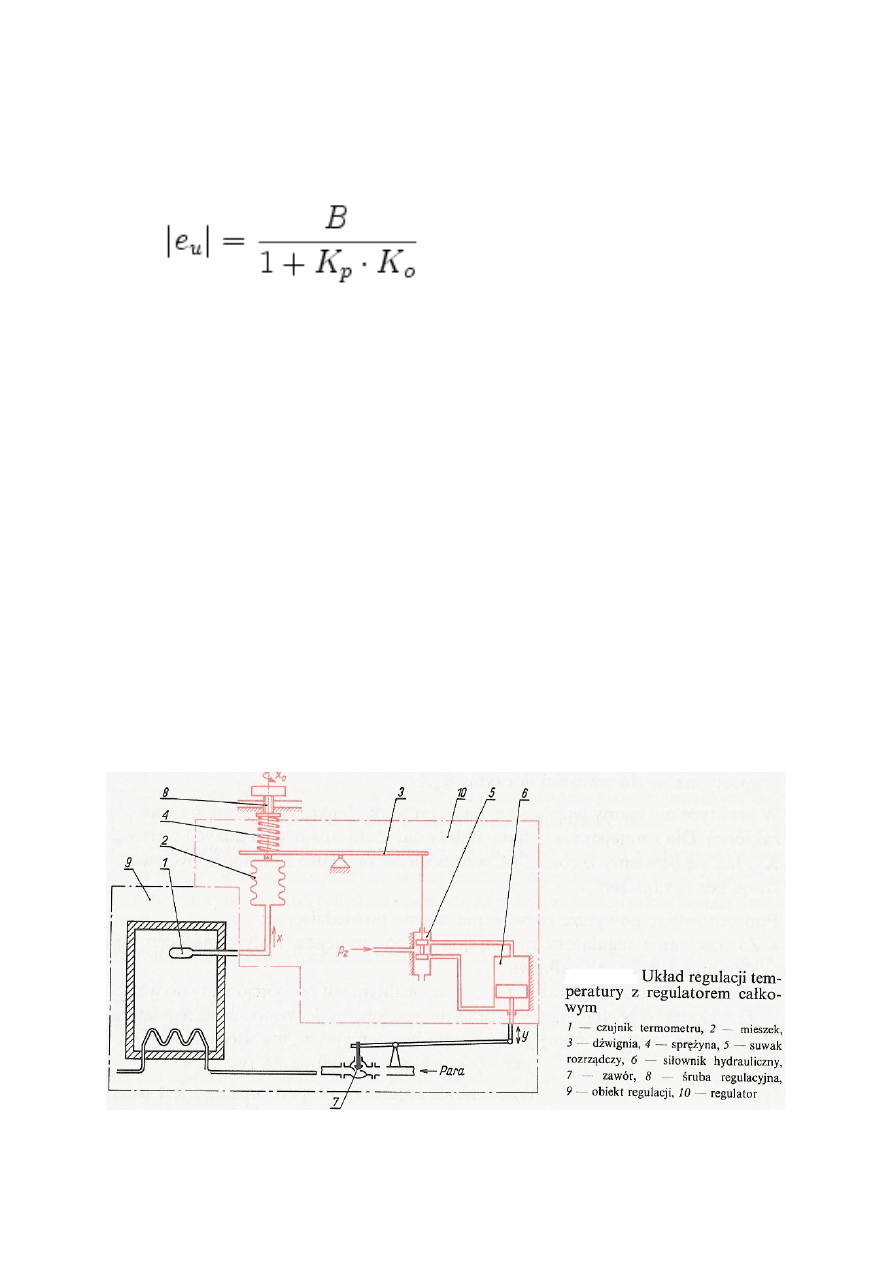
Wartość niezerowego uchybu:
gdzie: K
o
– wzmocnienie obiektu regulacji, B – wartość skoku
sygnału zadanego lub zakłócenia (wówczas B = A·K
o
), K
p
–
wzmocnienie regulatora
• W układzie z regulatorem proporcjonalnym dokładność
regulacji jest tym większa, im większe jest wzmocnienie.
• Zastosowanie regulatora P zmniejsza wpływ zakłóceń
• Uchyb w regulatorze P jest proporcjonalny do zakłóceń i w
przybliżeniu odwrotnie proporcjonalny do wzmocnienia
regulatora
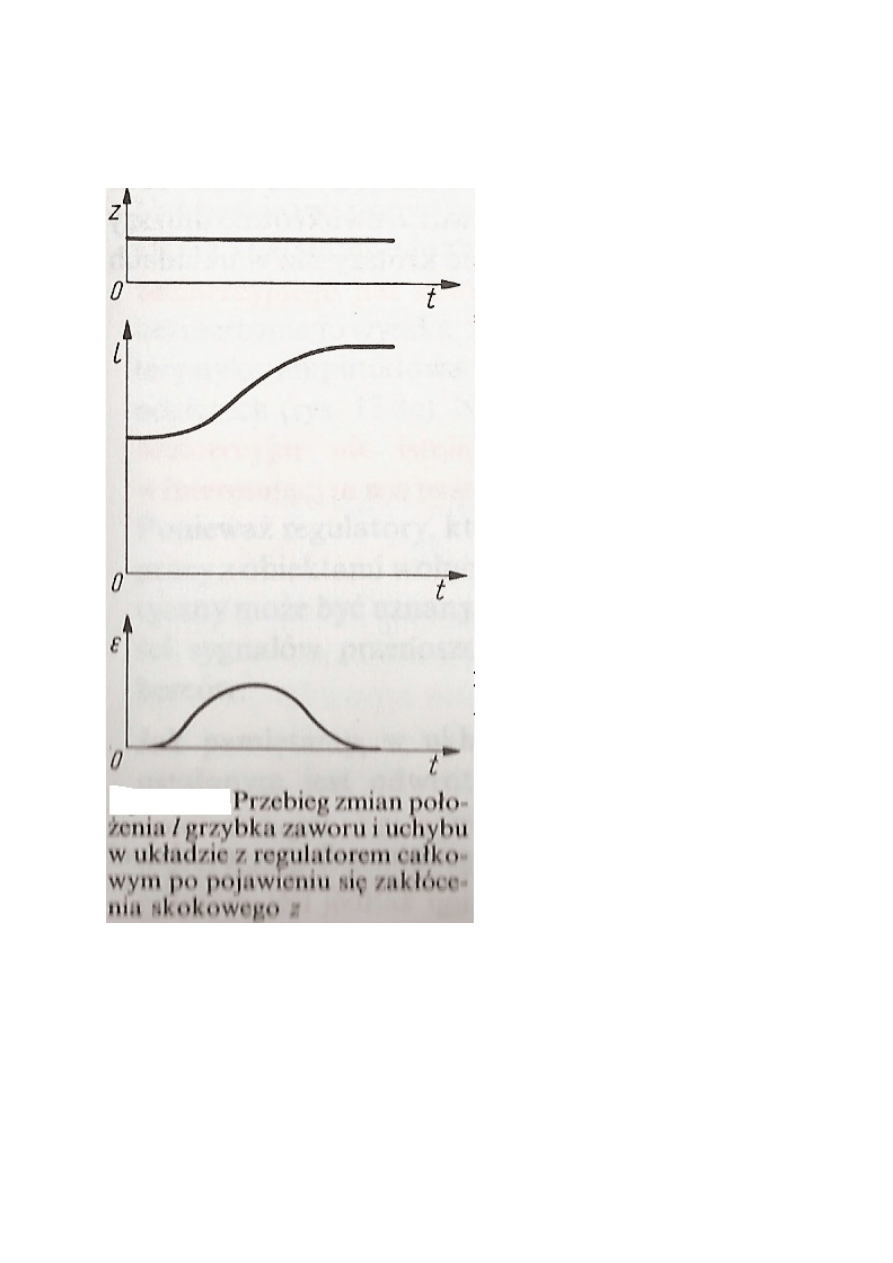
3. Regulator całkowy (typu I)
schemat układu regulacji temperatury z regulatorem typu I
5
6
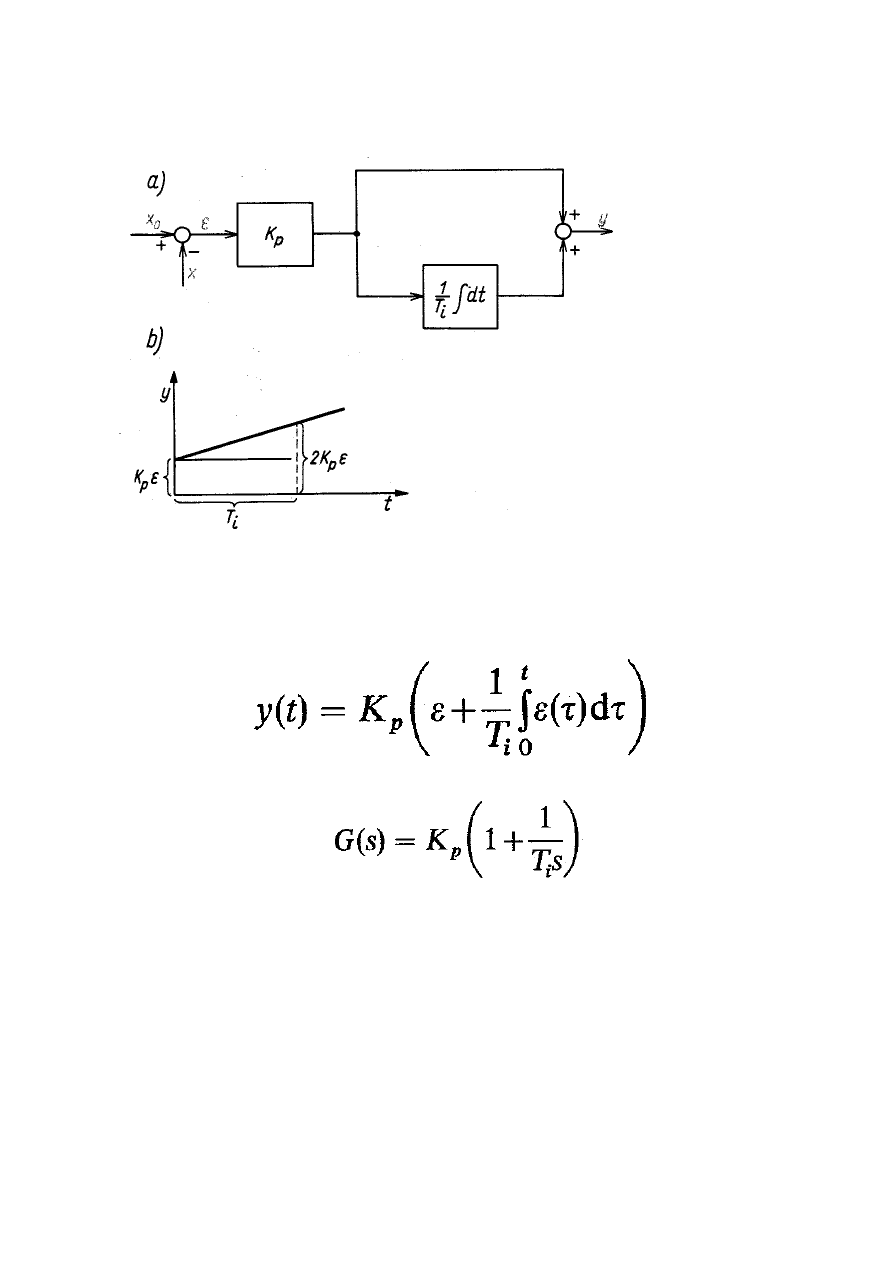
4. Regulator proporcjonalno – całkowy (typu PI)
Rys. Regulator proporcjonalno-całkowy: a) schemat blokowy;
b) odpowiedź skokowa.
Dzięki zastosowaniu w regulatorach
PI elementu całkującego,
uchyb ustalony w układach z takimi regulatorami może być
sprowadzony do zera. Czas regulacji w układach z regulatorami
typu
PI jest dwukrotnie dłuższy, niż w układach z regulatorami
typu
P, ale jest znacznie krótszy, niż w układach z regulatorami
typu
I.
7
8
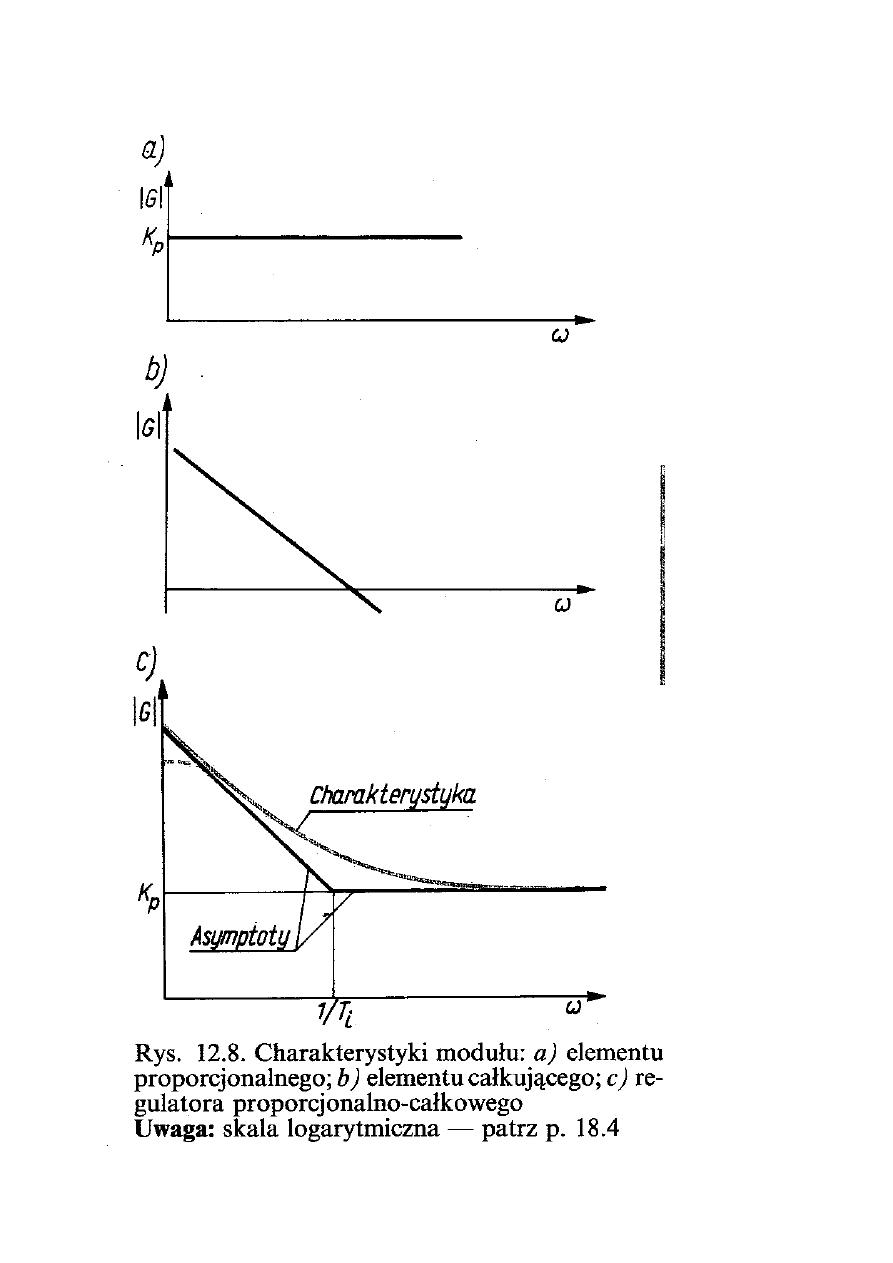
Warunkiem uzyskania uchybu zerowego regulacji w stanie
ustalonym jest zastosowanie regulatora, który przy
częstotliwości bliskiej zeru ma moduł transmitancji dążący
do nieskończoności.
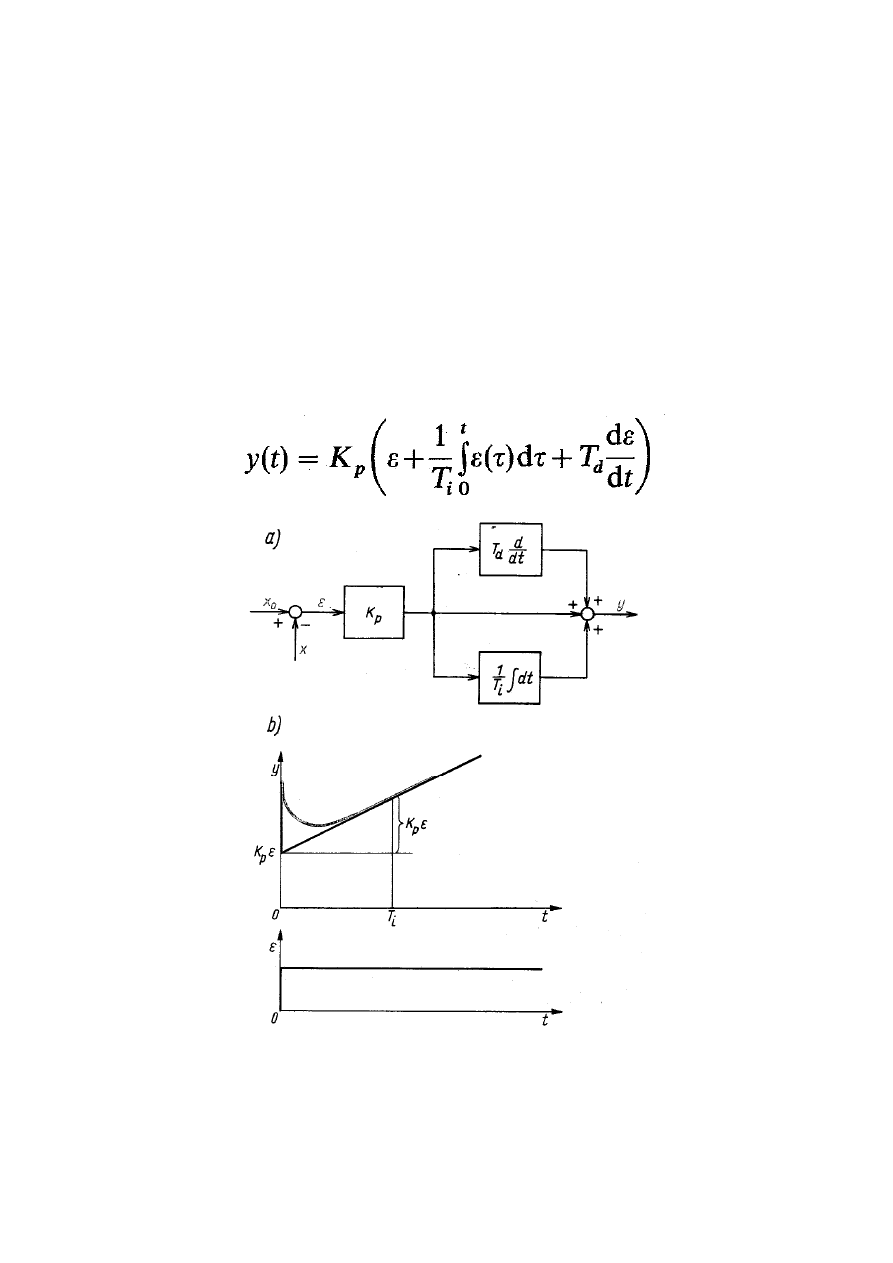
5. Regulator proporcjonalno – całkowo - różniczkowy
(typu PID)
Rys. Regulator proporcjonalno-całkowo-różniczkowy:
a) schemat blokowy; b) odpowiedź skokowa
9
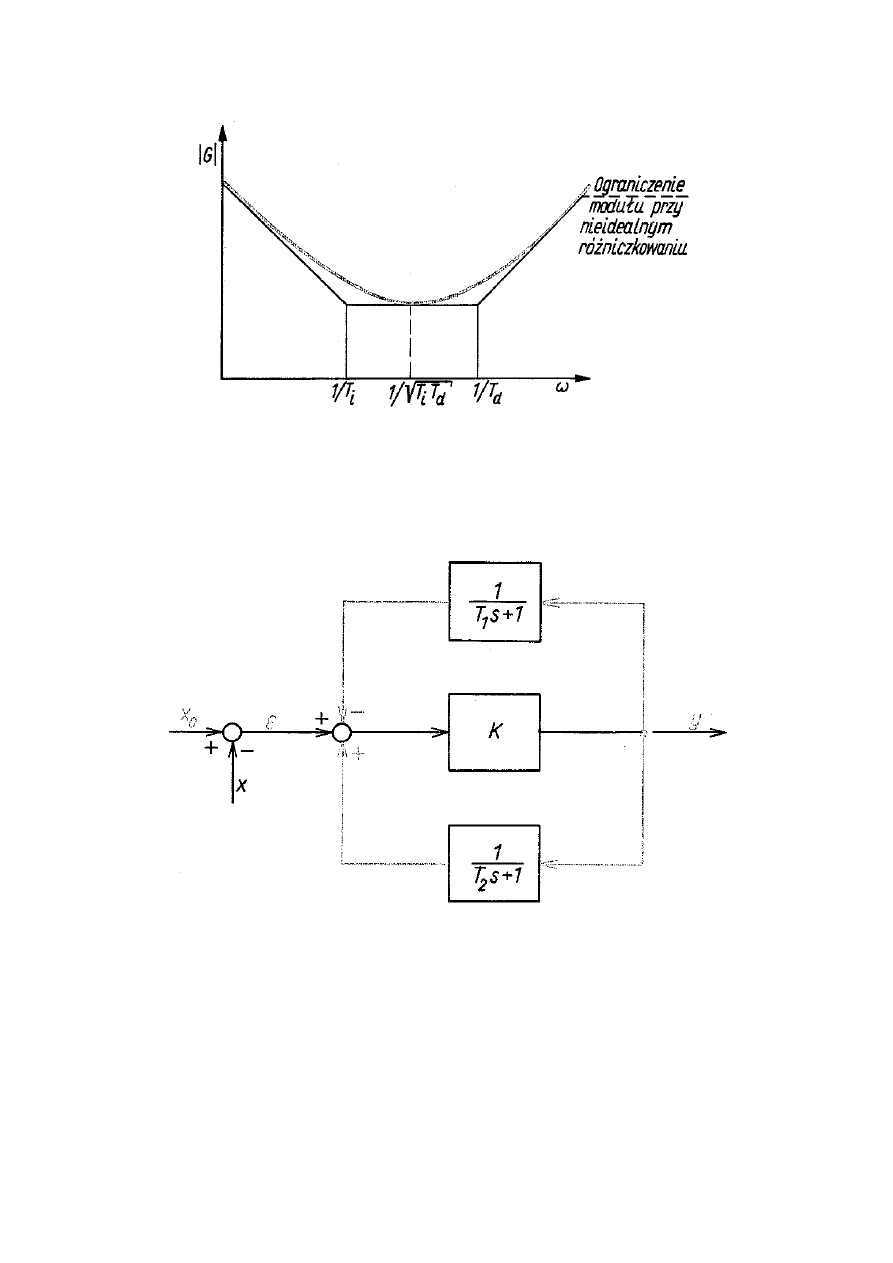
Rys. Charakterystyka modułu (amplitudowa) idealnego
regulatora PID (skala logarytmiczna)
Rys. Schemat blokowy regulatora PID z dodatnim i ujemnym
sprzężeniem zwrotnym obejmującym wzmacniacz.
10
6. Nastawy regulatorów

11
Nastawiane parametry:
• zakres proporcjonalności x
p
= (1/K
p
)100 w granicach
3-400%
• czas zdwojenia T
i
w granicach 3 s – 30 min
• czas wyprzedzania T
d
w granicach 0 – 15 min
12
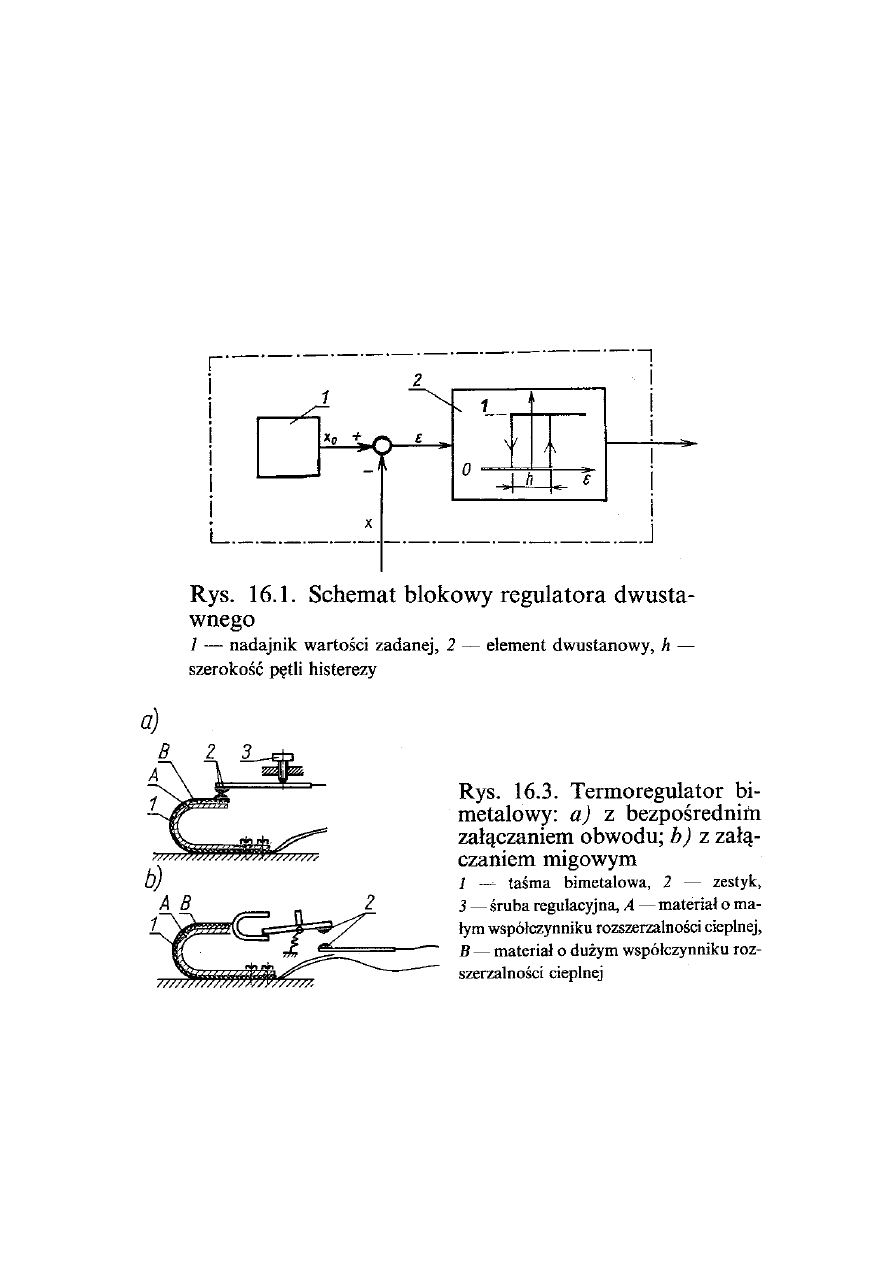
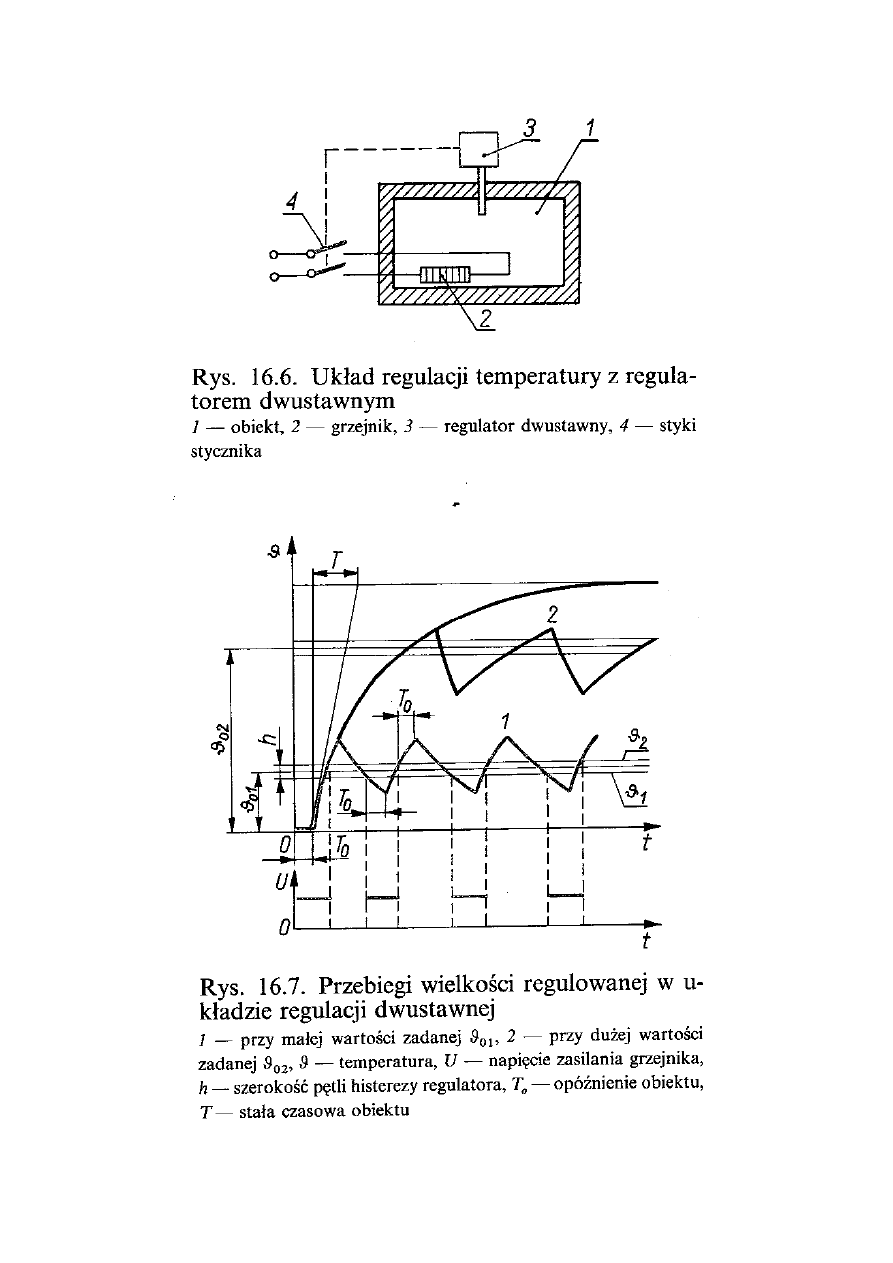
7. Regulatory dwu i trójstawne
Regulacja dwustawna – na wyjściu regulatora
otrzymujemy sygnał przyjmujący dwa stany
0 i 1, którym
odpowiada wyłączanie i załączanie energii lub materiału
docierających do obiektu.
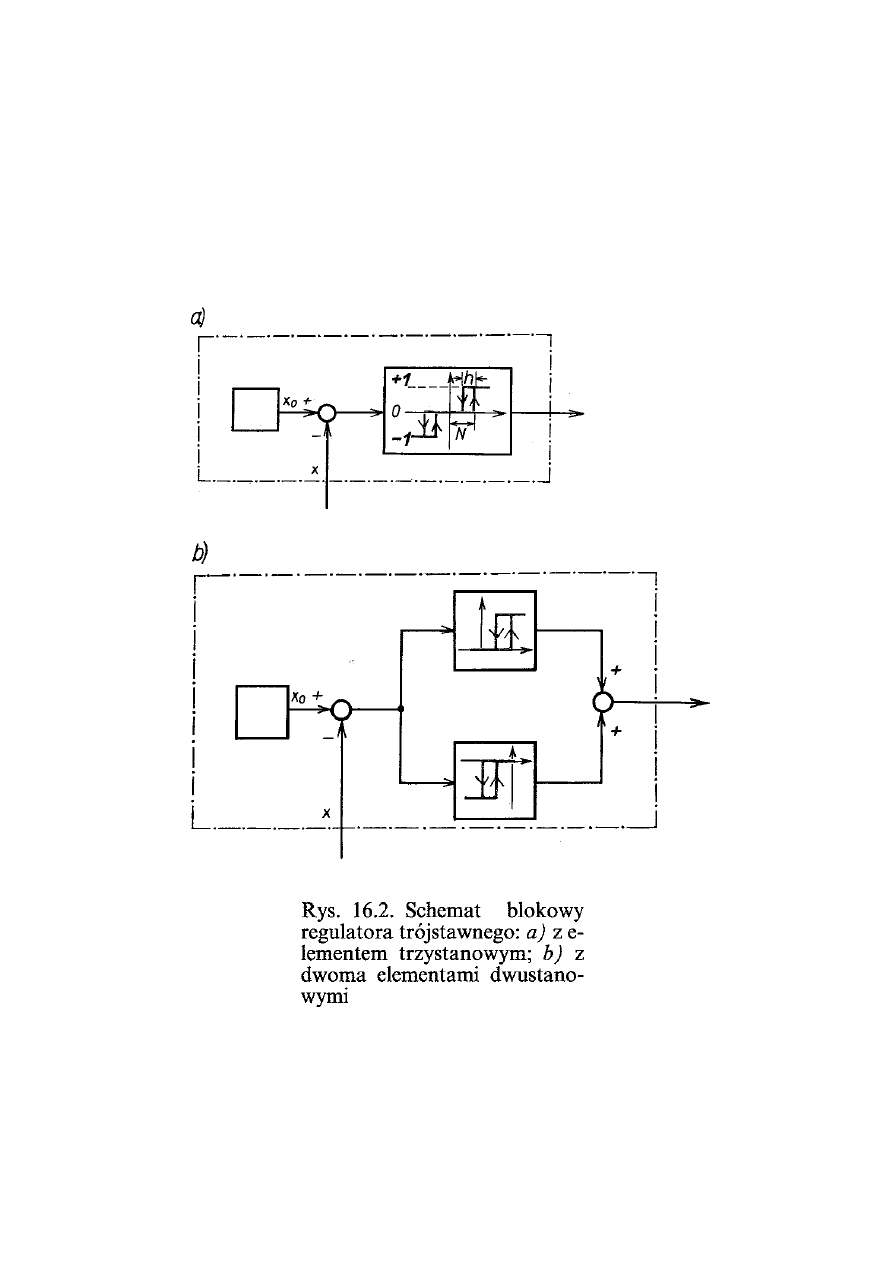
13
Regulacja trójstawna – oprócz 0 i 1 posiada trzeci
stan:
-1. Regulator taki można uzyskać stosując dwa
regulatory
dwustawne
z
przesuniętymi
charakterystykami.
14
15
16
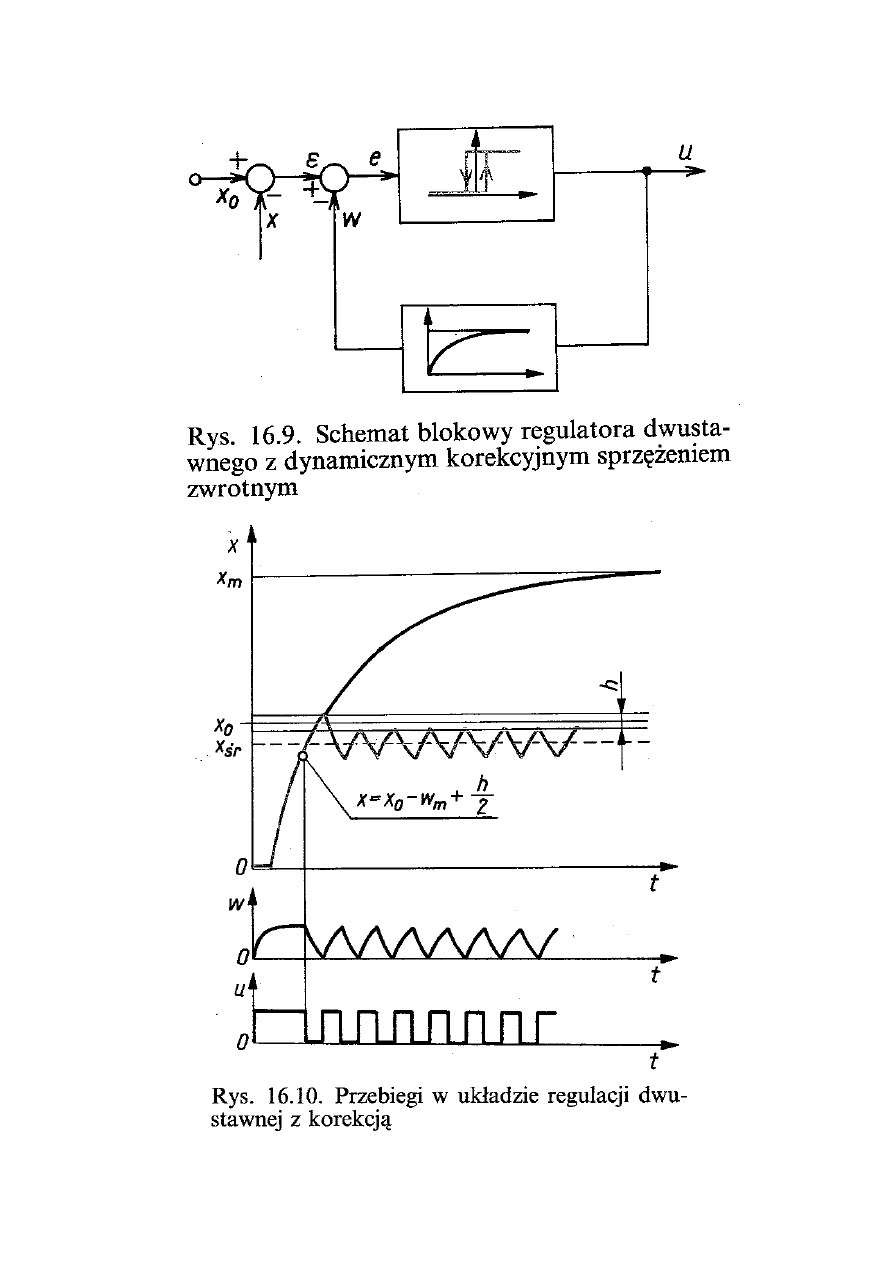
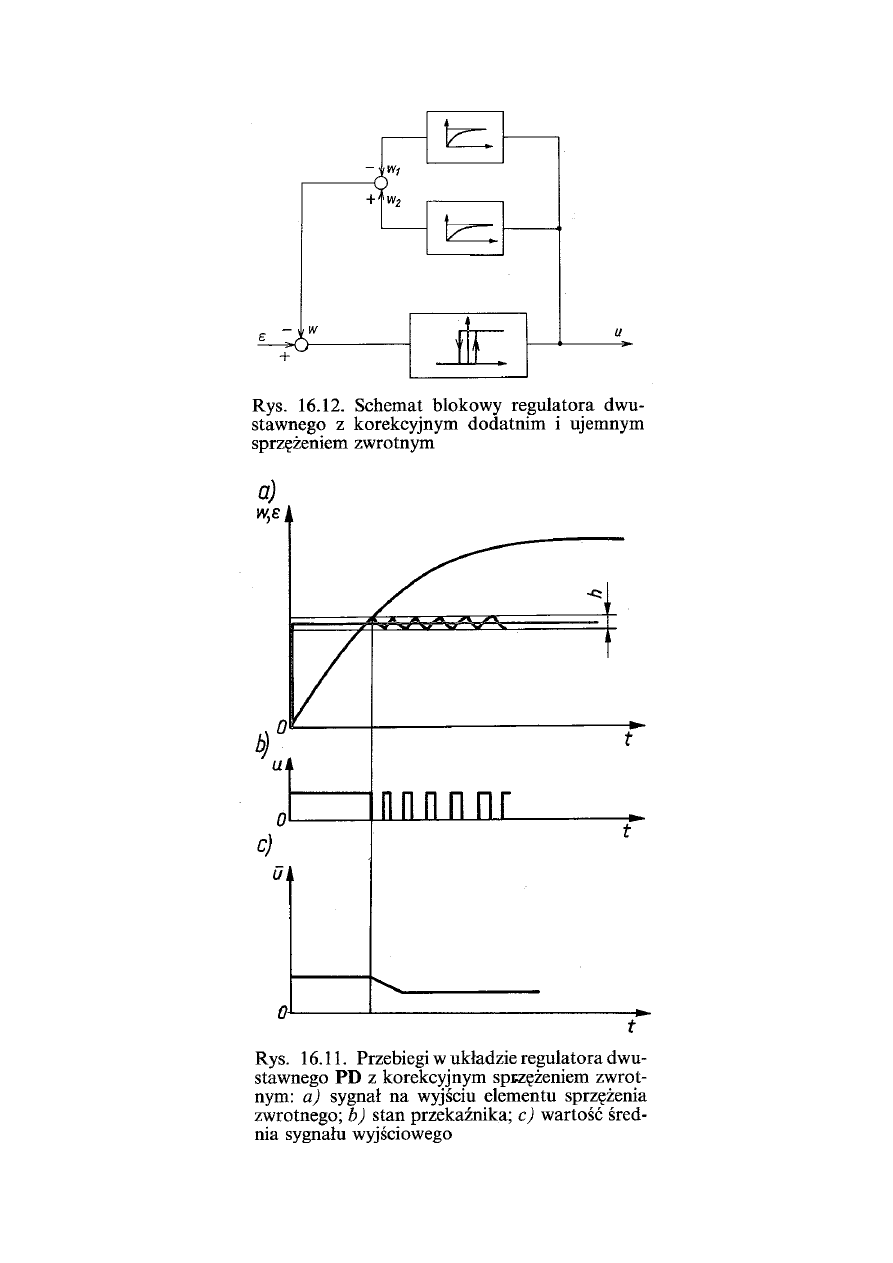
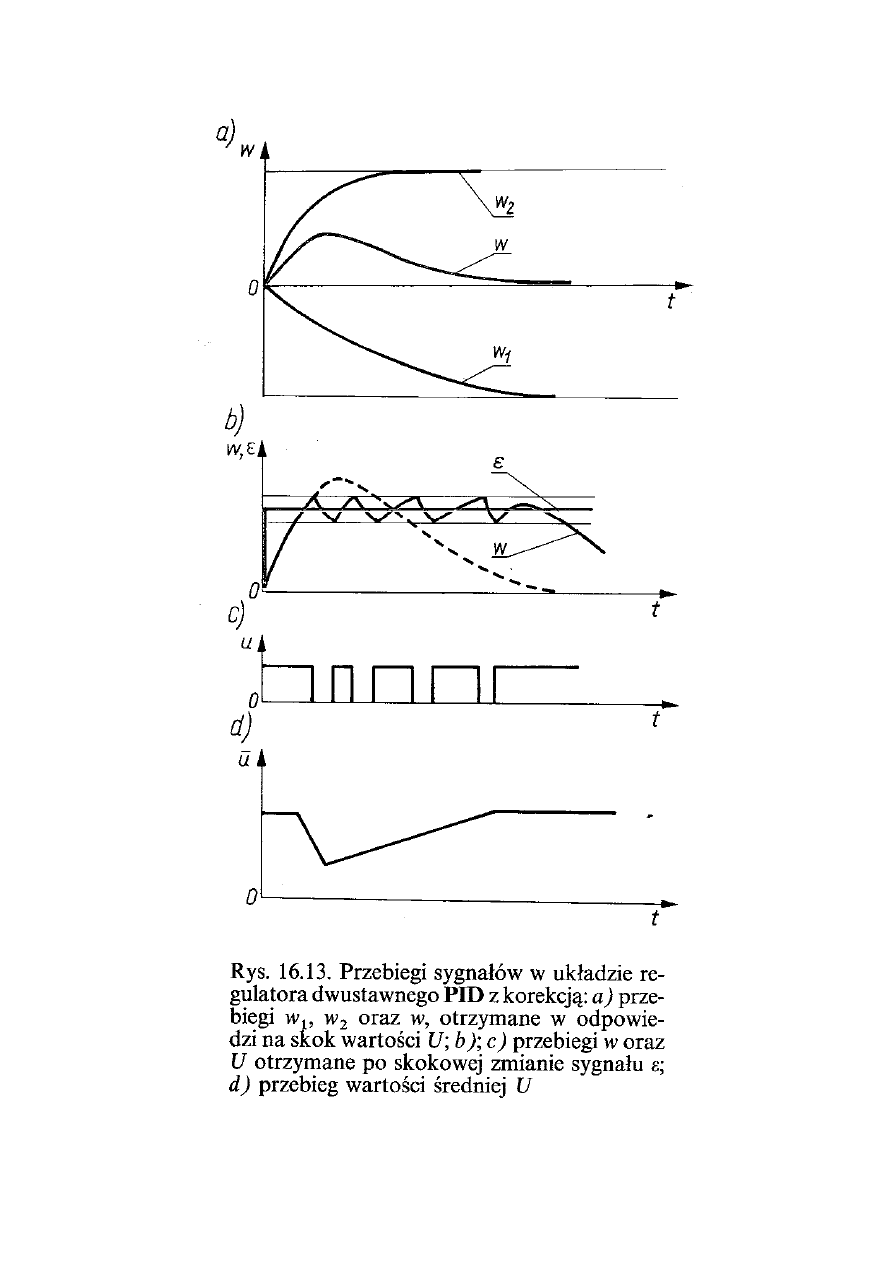
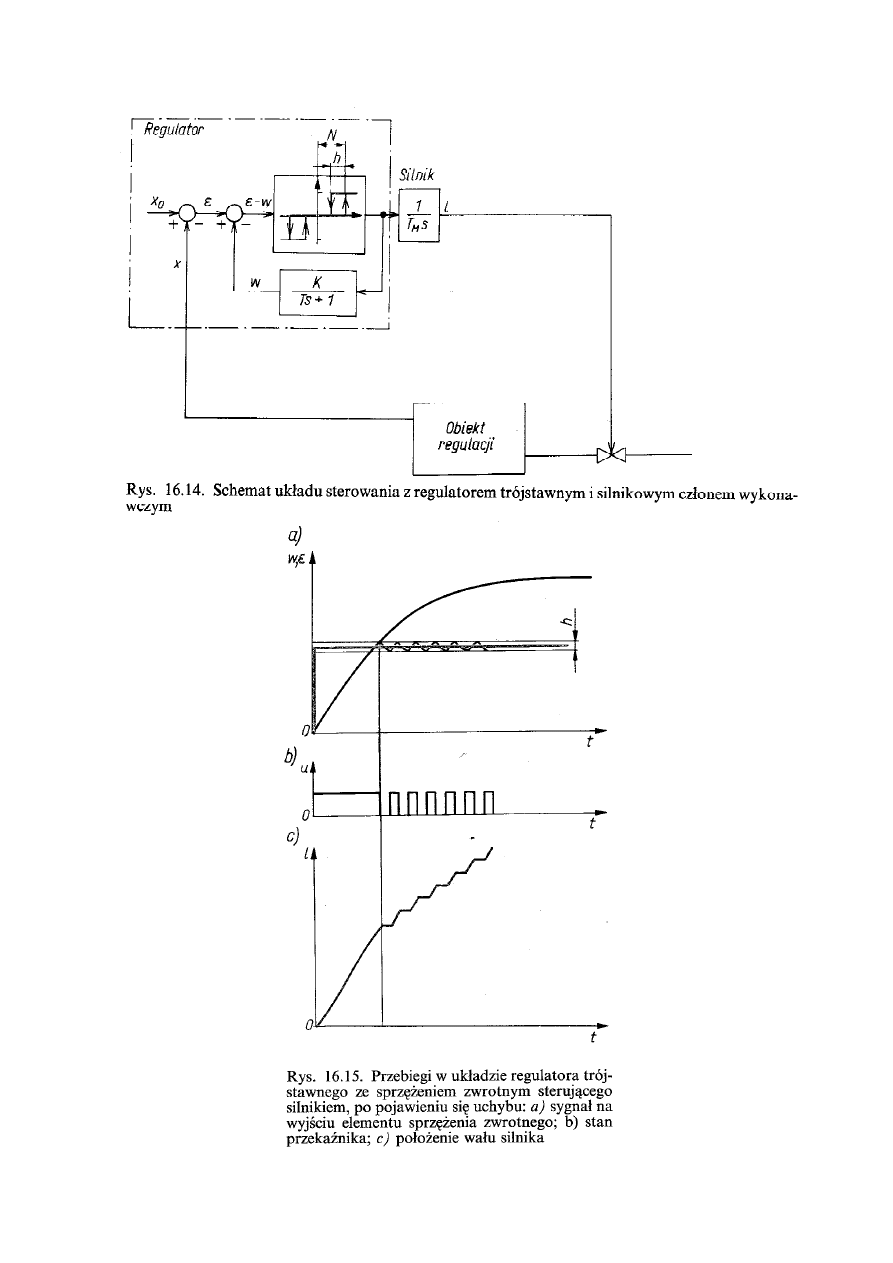
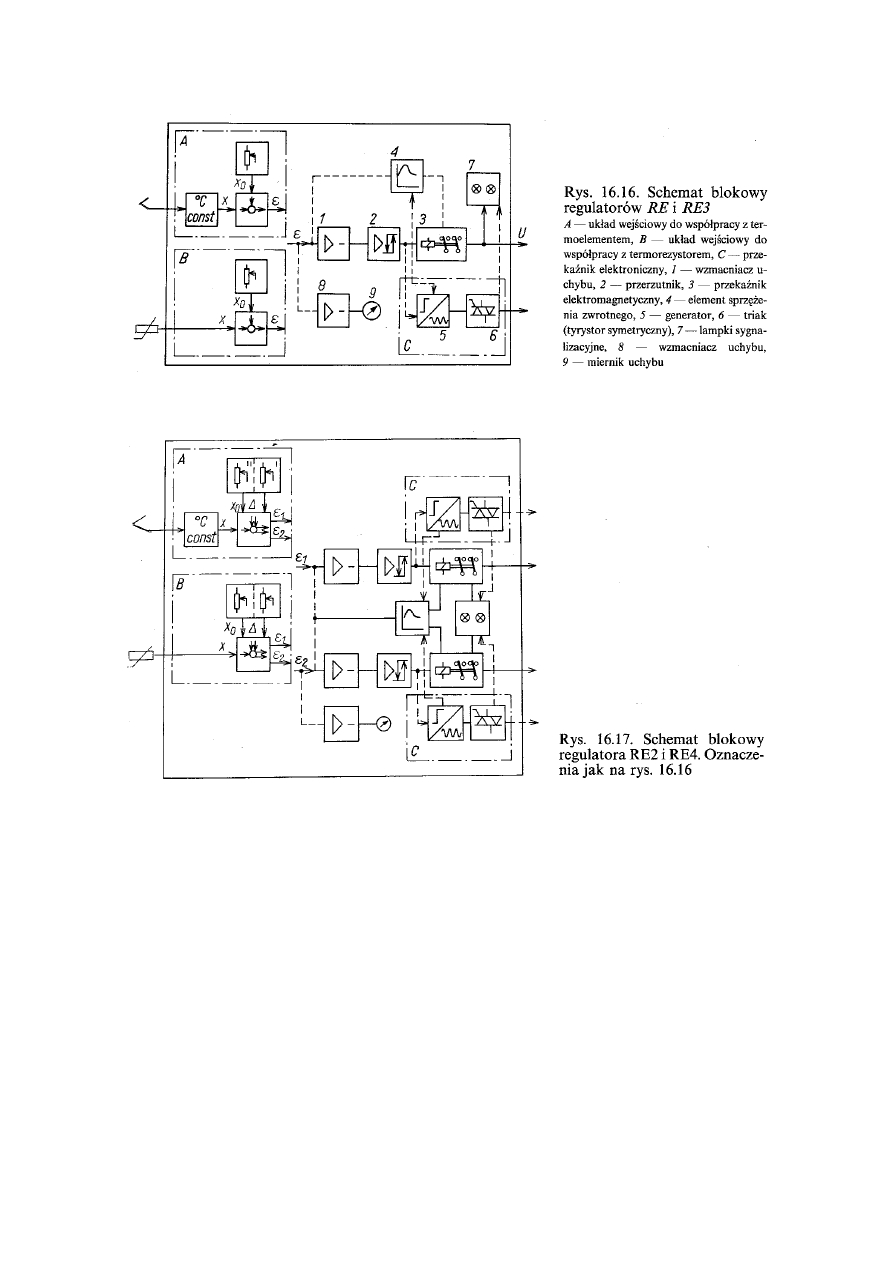
Regulatory dwustawne z dynamicznym sprzężeniem
zwrotnym.
17
18
19
20
21
Wyszukiwarka
Podobne podstrony:
WYKŁAD 15 Regulacja kaskadowa SI
15 REGULARYZACJA PROBLEMU B
15 REGULARYZACJA PROBLEMU B
15 Regulamin Główny Szlak Świętokrzyski compressed
Regulamin zaliczenia AM1 w 15
15. Jakie czynniki wpływają na regulację tempe ratury u zwierząt, Studia, biologia
15 dobor nastaw regulatoraid 16127 ppt
15 Instalowanie sterowników i regulatorów mikroprocesorowych
15 Wykonywanie napraw i regulacji maszyn precyzyjnych
Kampania wyborcza w regulacji prawnej i w praktyce stan prawny na 15 lipca 2015 r
jezyk angieslki szkola podstawowa kokurs kuratoryjny regulamin 2 15 2016
Genetyka regulacja funkcji genow
wyklad 14 15 2010
więcej podobnych podstron