
5. Maszyny komutatorowe
Maszyny komutatorowe prądu przemiennego są powszechnie stosowane jako silniki jednofazowe i
trójfazowe w układach napędowych wymagających ciągłej regulacji prędkości obrotowej. Wymagania
te spełniają obecnie stosowane, tańsze i mniej uciążliwe w użytkowaniu, maszyny prądu stałego i
przemiennego zasilane z układów przekształtnikowych.
Silniki komutatorowe prądu przemiennego dzielą się na:
a) silniki szerego
we jednofazowe małej mocy i dużej mocy oraz trójfazowe,
b) silniki bocznikowe jednofazowe i trójfazowe,
c) silniki jednofazowe repulsyjne
5.1 Rodzaje silników komutatorowych jednofazowych:
a) silniki małej mocy,
b) silniki jednofazowe szeregowe dużej mocy,
c) silniki repulsyjne małej i średniej mocy,
d) silniki indukcyjne liniowe.
5.1.1 Silniki małej mocy ogólnego zastosowania, są produkowane masowo o mocy od kilku watów
do 1,1 kW, wykorzystywane
rozpowszechnione do napędu różnych drobnych urządzeń jak np.
zabawek, sprzętu gospodarstwa domowego, narzędziach ręcznych i urządzeń laboratoryjnych itp. Są
to silniki jednofazowe prądu przemiennego lub prądu stałego różnego typu, o prędkościach
obrotowych od 3000 obr./min. do 20 000 obr./min. i o różnych napięciach znamionowych.
Silniki te zbudowane są podobnie jak silniki prądu stałego z tą różnicą, że ich obwód magnetyczny
jest wykonany w całości z blachy prądnicowej. Jest to konieczne ze względu na zasilanie tych silników
prądem przemiennym. Silniki mogą również pracować przy zasilaniu prądem stałym. W tym przypadku
rozwijany moment obrotowy jest większy od średniego momentu powstającego przy zasilaniu prądem
przemiennym.
5.2.2 Silniki jednofazowe szeregowe dużej mocy. Silniki te znalazły zastosowanie w trakcji
elektrycznej przy zasilaniu z sieci o zmniejszonej częstotliwości. W Polsce nie są stosowane, gdyż
trakcja jest zasilana prądem stałym.
5.2.3 Silniki repulsyjne
Silnik repulsyjny jest to jednofazowy silnik k
omutatorowy, w którym uzwojenie stojana zasilane jest
z sieci prądu przemiennego, a uzwojenie wirnika złączone jest z komutatorem i zwarte za
pośrednictwem szczotek. Stojan i wirnik silnika repulsyjnego mają niezależne obwody elektryczne, a
przenoszenie en
ergii elektrycznej ze stojana do wirnika odbywa się drogą indukcji
elektromagnetycznej. Silnik repulsyjny budową przypomina silnik komutatorowy jednofazowy o
wzbudzeniu bocznikowym.
Położenie szczotek na obwodzie komutatora określa się kątem α. Jest to kąt ustawienia szczotek
względem obojętnej osi magnetycznej stojana. Rozruch i regulacja prędkości obrotowej silnika zależy
od położenia szczotek. Przez zmianę kąta α położenia szczotek możemy również uzyskiwać zmianę
kierunku wirowania silnika.
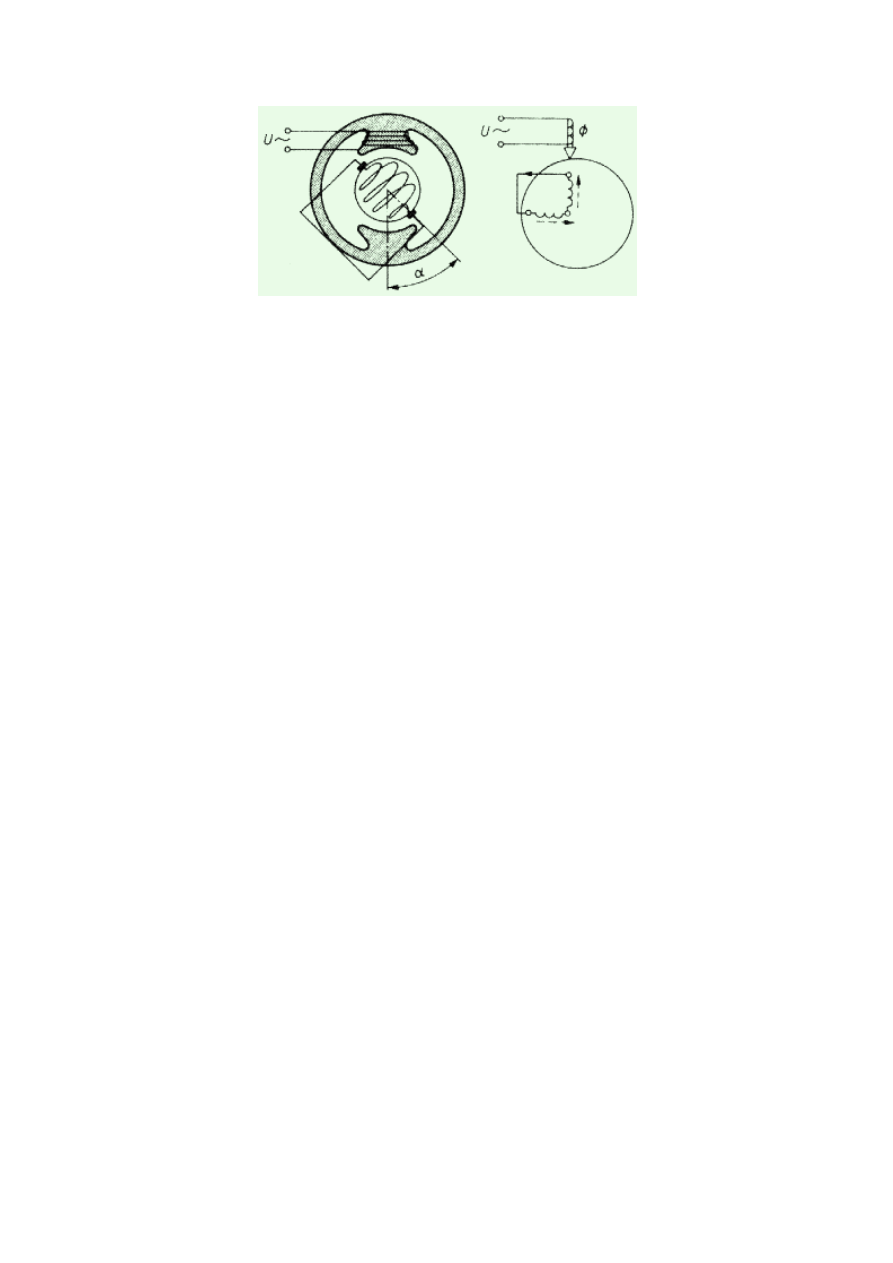
Rys. 6 Silnik repulsyjny
Oznaczenia: a) schemat obwodu elektromagnetycznego b) zasada działania
Istnieją następujące odmiany silników repulsyjnych:
1) silnik Thomsona o pojedyńczym układzie szczotek,
2) silnik Deriego. Ma dwa układy szczotek - jeden na jarzmie ruchomym, drugi - na jarzmie
nieruchomym. Regulacja prędkości obrotowej jest bardzo płynna, a komutacja lepsza niż w silniku
repu
lsyjnym zwykłym,
3) silniki repulsyjno -
indukcyjne. Mają w wirniku dodatkowo klatkę (jak w silniku indukcyjnym
klatkowym). Rozruch następuje przez bezpośrednie włączenie silnika do sieci zasilającej. Wybór
kierunk u w irowania uzyskuje się, odpowiednio przesuwając szczotki, które są następnie
mocowane na stałe.
Właściwości:
a) duży moment rozruchowy: Mr = (3,5-5)M
zn
b) niewielki prąd rozruchowy: Ir = 3,5 I
zn
c) płynna regulacja prędkości obrotowej w dużych granicach
d) duże zmiany prędkości obrotowej przy zmianie obciążenia
Zastosowanie:
Silniki te stosuje się tam, gdzie rozruch odbywa się pod obciążeniem i to przy znacznie
obniżonym napięciu. – np. do pomp sterowanych automatycznie
5.2.4 Silniki trójfazowe szeregowe
Budowa stojana silnika jest taka sama jak w maszynie indukcyjnej trójfazowej z tym, że początki
uzwojeń fazowych są przyłączone do sieci, a końce do szczotek na komutatorze. Wirnik natomiast
zbudowany jest, jak w maszynie prądu stałego. Na komutatorze są zabudowane trzy zespoły
szczotek, odpowiednio dla każdej pary biegunów. Zespolony wspólny układ szczotek może być
przesuwany po obwodzie komutatora.
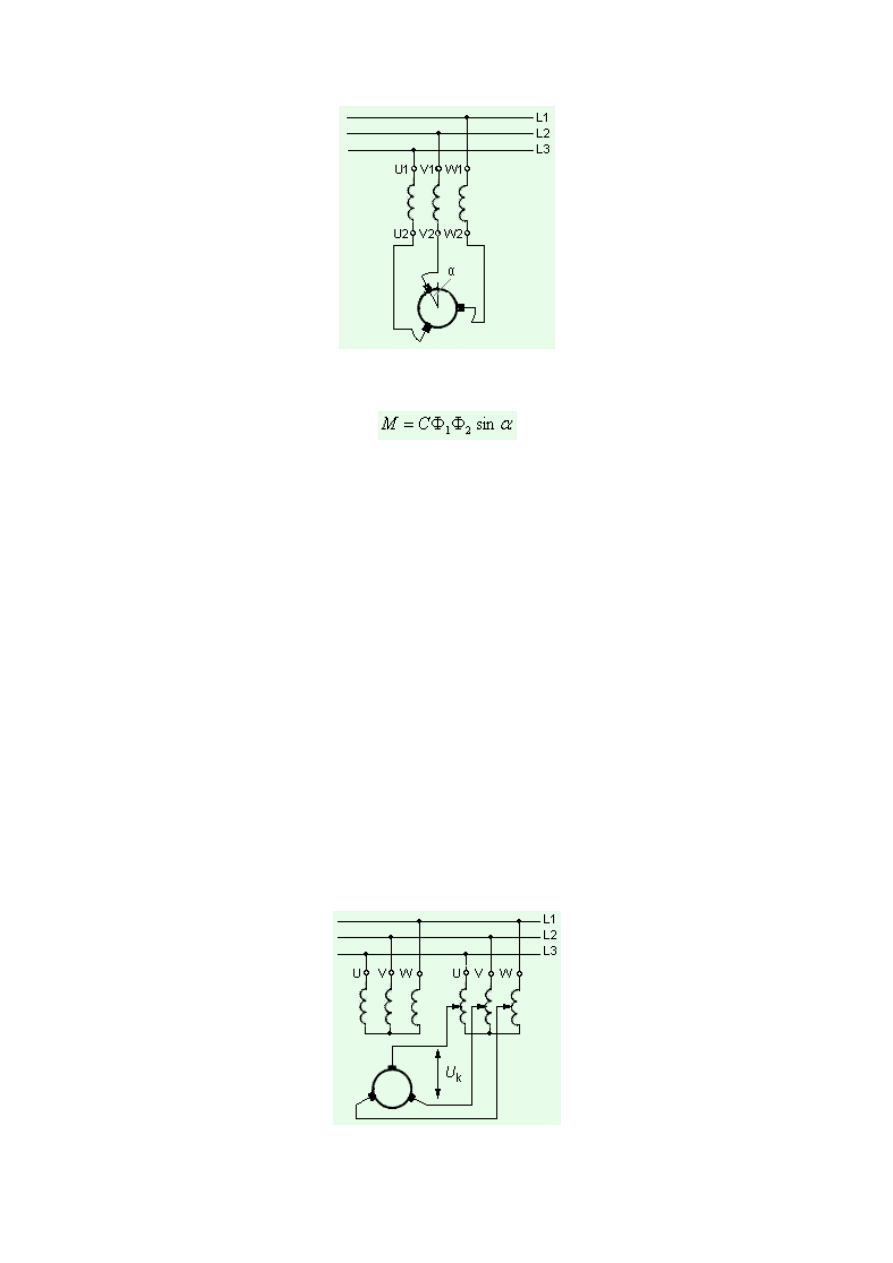
Rys. 7 Układ połączeń silnika szeregowego trójfazowego
Moment obrotowy, który powstaje przy kącie α wyrażony jest wzorem:
gdzie: Φ
1
,Φ
2
- strumienie magnetyczne stojana i wirnika.
Regulując kąt α w zakresie 0 < α <180
o
, można dostosować moment obrotowy silnika przy
wymaganej prędkości do określonego obciążenia. W skrajnym położeniu szczotek, gdy kąt α = 0 -
bieg jałowy, przy kącie α = 180
o
-
stan zwarcia. W obu pozycjach moment obrotowy jest równy zeru.
Przy małych obciążeniach silnik ma tendencję do rozbiegania się. Aby temu zapobiec, obniża się
napięcie zasilania silnika, lub stosuje transformator oddzielający elektrycznie uzwojenie stojana od
wirnika.
Kierunek wirowania silnika zmienia się przez zmianę dowolnych dwóch przewodów zasilających
oraz przes
unięcie szczotek w przeciwnym kierunku. Rozruch polega na bezpośrednim włączeniu do
sieci przy biegu jałowym.
Silniki trójfazowe szeregowe były wykorzystywane w układach napędowych o wymaganym dużym
momencie rozruchowym początkowym. Stosowano je także w napędach wentylatorów, pomp,
sprężarek i in.
5.2.5 Silniki trójfazowe bocznikowe
Stojan silnika trójfazowego bocznikowego jest wykonany jak w silniku indukcyjnym trójfazowym,
wirnik podobnie jak w maszynie
prądu stałego. Znajdujący się na komutatorze układ trzech szczotek
jest połączony z suwakiem transformatora regulacyjnego.
Rys. 8 Układ połączeń silnika komutatorowego trójfazowego
zasilanego od strony stojana, z autotransformatorem regulacyjnym.
Regulację prędkości obrotowej uzyskuje się przez zmianę napięcia U
k
zasilającego układ
szczotkowy.
Rozruch następuje przez bezpośrednie włączenie do sieci w położeniu najmniejszej
prędkości obrotowej.
5.2.7 Silniki indukcyjne liniowe
Jeśli zwykły wirujący silnik indukcyjny przetniemy półpłaszczyzną ograniczoną osią maszyny i
rozwiniemy po obwodzi
e, to otrzymamy silnik liniowy płaski. Natomiast przez zwinięcie silnika
liniowego płaskiego wzdłuż osi pokrywającej się z kierunkiem ruchu otrzymamy silnik liniowy tubowy.
Część pierwotna silnika n osi nazwę induktora, a część wtórna bieżnika.
Część pierwotna silnika zbudowana jest z pakietu blach w formie grzebienia, z uzwojeniem
trójfazowym (rozwinięty stojan maszyny wirującej), natomiast część wtórną stanowi ferromagnetyczna
warstwa przewodząca (z miedzi lub aluminium), spełniająca rolę klatki.
Wynikiem przekształcenia silnika wirującego w liniowy jest przejście od pola magnetycznego
wirującego do pola magnetycznego wędrującego wzdłuż induktora. Droga magnetyczna, wzdłuż której
wiruje pole magnetyczne, jest w silniku wirującym zamknięta. Natomiast w silniku liniowym droga
magnetyczna, wzdłuż której wędruje pole magnetyczne, ma swój początek, gdzie pole powstaje oraz i
koniec, gdzie pole zanika. Daje to zamiast wirującego strumienia magnetycznego strumień
magnetyczny wędrujący wzdłuż pakietu induktora. Jeżeli w wytworzonym strumieniu magnetycznym
zostanie umieszczony bieżnik, to zaindukowane w nim prądy spowodują powstanie siły ciągu F,
skierowanej w kierunku ruchu strumienia (wzdłuż pakietu induktora). Siła wytworzona w silniku
liniowym jest wy
rażona wzorem:
gdzie: c -
stała konstrukcyjna,
p -
liczba par biegunów induktora,
Φ
1
-
strumień biegunów głównych, sprzęgający się z częścią wtórną silnika,
ψ
2
-
kąt fazowy między napięciem indukowanym w części wtórnej a prądem I
2
indukowanym w tej
części.
Następstwem działania tej siły jest może być ruch silnika względem bieżnika. Zmianę kierunku siły
ciągu F uzyskuje się przez zmianę kolejności faz.
Prędkość liniowa (obwodowa) z jaką strumień magnetyczny biegnie wzdłuż pakietu, względem
obwodu wewnętrznego wytoczenia stojana o średnicy D, wyrażona w m/s, wynika ze wzoru:
gdzie: f -
częstotliwość napięcia zasilającego w Hz,
p -
liczba par biegunów.
T
p
-
podziałka biegunowa stojana (induktora) w cm,
Silniki liniowe pracują na ogół przy prędkości wynoszącej zaledwie 10 - 15% prędkości
synchronicznej. Prędkość silnika reguluje się zwykle przez zmianę wartości siły ciągu, uzyskaną przez
zmianę wartości napięcia zasilania lub wielkości szczeliny powietrznej między silnikiem a bieżnią.
Silniki liniowe przetwarzają, za pośrednictwem pola magnetycznego, energię elektryczną na
energię mechaniczną przy ruchu postępowym. Podobnie jak silniki wirujące, silniki liniowe mogą być
prądu stałego i prądu przemiennego. Ze względu na prostotę wykonania najchętniej są stosowane
silniki liniowe indukcyjne.
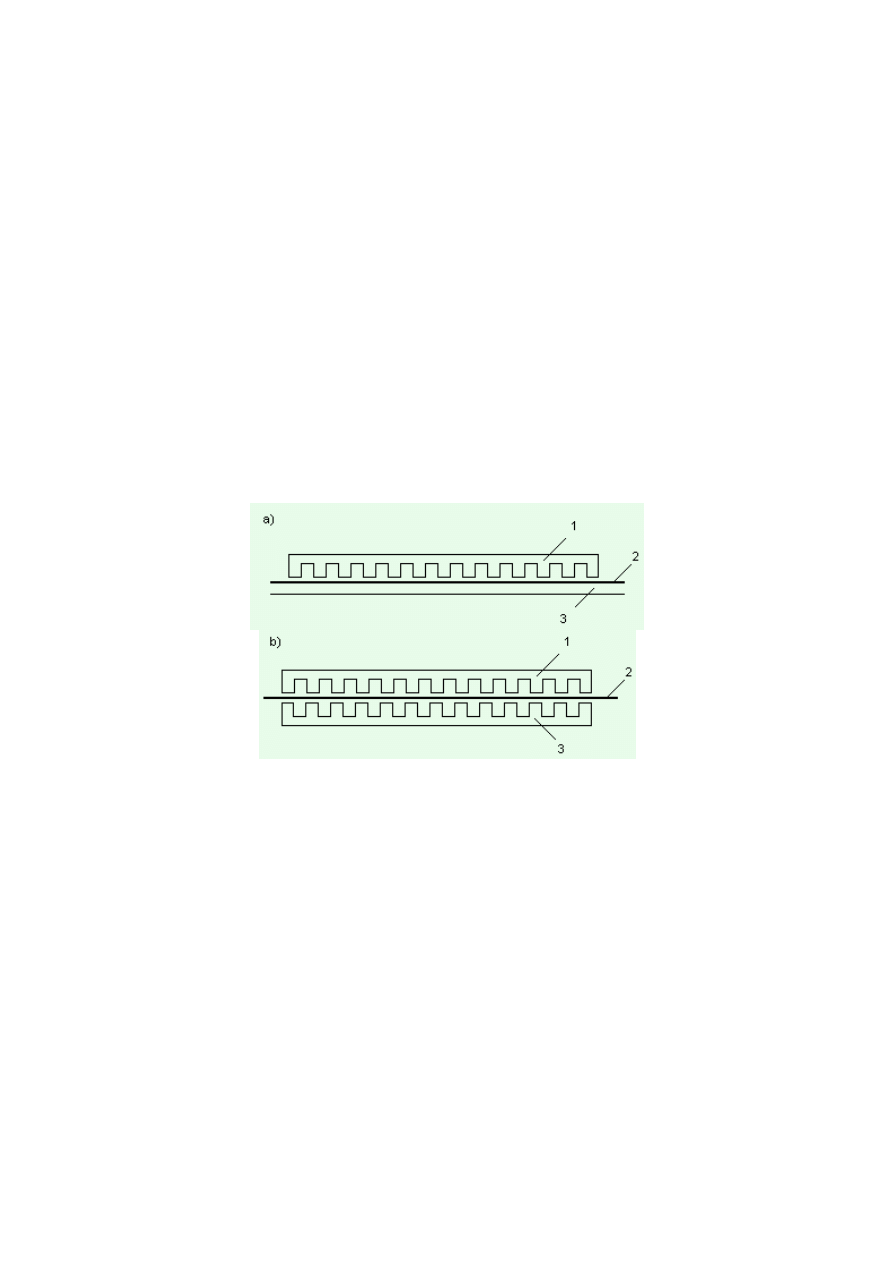
1) Silniki liniowe indukcyjne płaskie
Silnik liniowy płaski składa się z induktora i bieżnika, które są odpowiednikami stojana i wirnika
silnika indukcyjnego wirującego, przekształconego przez przecięcie stojana i wirnika wzdłuż
powierzchni bocznej walca
i rozwinięcie ich na płaszczyźnie. Częścią ruchomą silnika może być
zarówno induktor, jak i bieżnik.
Uzwojenie wielofazowe induktora, wytwarzające pole magnetyczne wędrujące, ułożone jest w
płaskim pakiecie żłobków induktora.
Silniki liniowe płaskie mogą być budowane z jednostronnym lub dwustronnym induktorem.
Rys. 9 Schemat budowy silnika indukcyjny liniowego:
a) płaskiego jednostronnego, b) płaskiego dwustronnego
Oznaczenie: 1 -
induktor (rdzeń części pierwotnej), 2 - bieżnik (warstwa
p
rzewodząca części wtórnej), 3 - rdzeń ferromagnetyczny części wtórnej
2) Silnik liniowy tubowy
W silnikach tubowych część pierwotną i część wtórną stanowią cylindry ustawione względem
siebie współosiowo. Część wtórna jest umieszczona wewnątrz części pierwotnej silnika. Wytworzone
w cylindrze części pierwotnej pole magnetyczne porusza się w kierunku osiowym, pociągając za sobą
nieuzwojoną, ferromagnetyczną część wtórną. Zwiększenie siły ciągu F silnika tubowego można
uzyskać przez pokrycie rdzenia części wtórnej warstwą o dobrej przewodności elektrycznej.
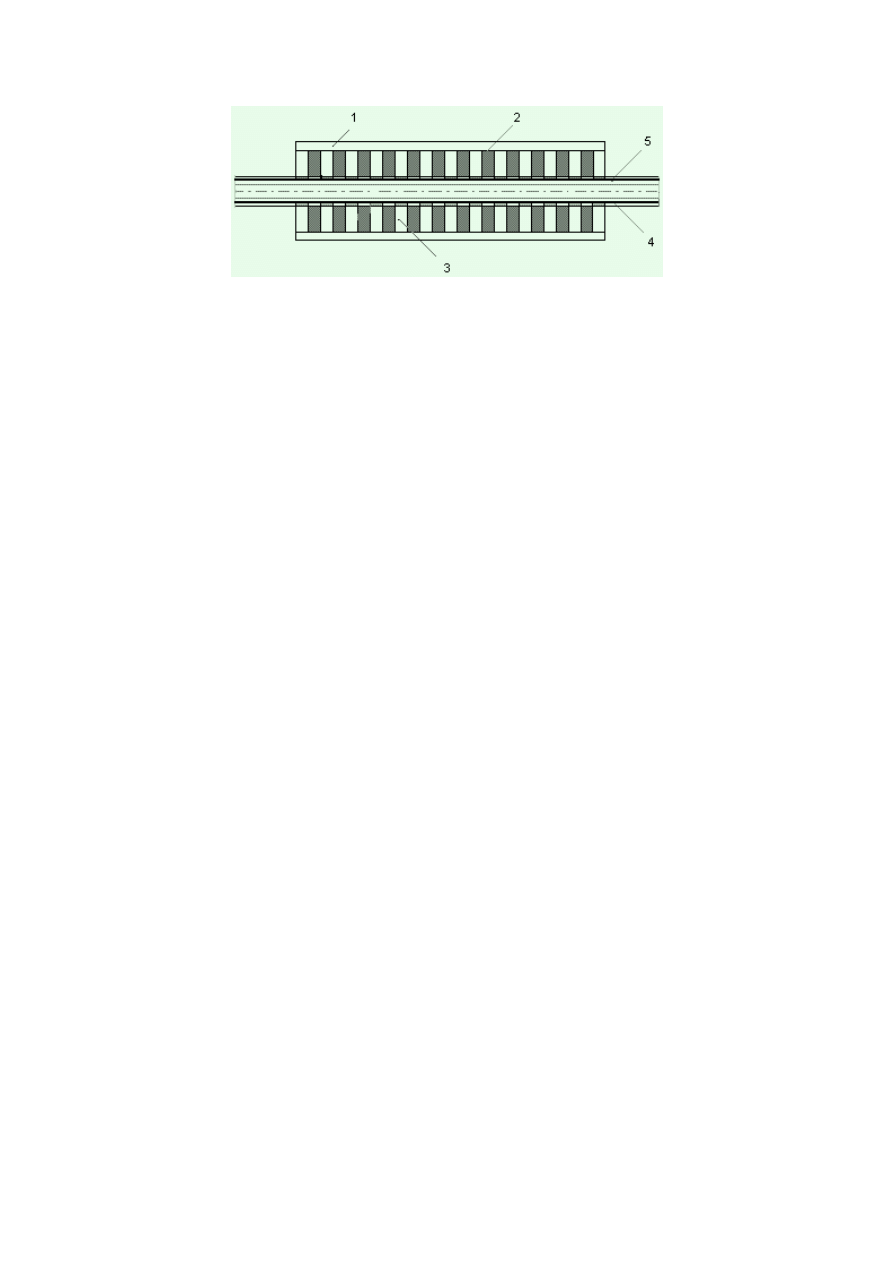
Rys. 10 Zasada budowy silnika liniowego indukcyjnego tubowego
Oznaczenia: 1 - rura ferromagnetyczna, 2 -
pierścieniowe cewki uzwojenia pierwotnego,
3 -
pierścienie ferromagnetyczne, 4 - warstwa przewodząca części wtórnej,
5 -
rdzeń ferromagnetyczny części wtórnej.
Silniki indukcyjne liniowe stosuje się głównie w automatyce, w napędach maszyn specjalnych, w
trakcji elektrycznej, do napędu: suwnic, drzwi przesuwnych, wyłączników, zaworów, maszyn i
urządzeń w transporcie zakładowym itp.
Wyszukiwarka
Podobne podstrony:
Maszyna komutatorowa pradu stalego
Maszyny komutatorowe prądu przemiennego
Maszyny komutatorowe
Egzamin z E.P.E, maszyny komutatorowe
Maszyna komutatorowa pradu stalego
Maszyna komutatorowa pradu stalego
Silnik 1-fazowy , komutatorowy , małej mocy , LABORATORIUM MASZYN ELEKTRYCZNYCH
Badanie 3-fazowego silnika komutatorowego typu Schrage - f, Polibuda, IV semestr, SEM IV, Maszyny El
p 43 ZASADY PROJEKTOWANIA I KSZTAŁTOWANIA FUNDAMENTÓW POD MASZYNY
sieci Techniki komutacji
Technologia Maszyn CAD CAM
Maszynoznawstwo prezentacja multimedialna
czas pracy maszynistówa bezpieczenstwo kolejowe KTS
Maszynoznawstwo+wyklad+2
ubezpieczenie maszyn od awarii
ćw1 Maszyna turinga
maszyny do zbioru warzyw i owocĂłw
więcej podobnych podstron