Akademia Górniczo-Hutnicza
Katedra Robotyki i Mechatroniki
Identyfikacja i analiza sygnałów
Laboratorium 2
Wprowadzenie do przetwarzania sygnałów w dziedzinie
czasu
Przetwarzanie sygnału dla potrzeb badania dynamiki układów
mechanicznych
Problemy wstępnego przetwarzania sygnału w dziedzinie czasu
Podstawową czynnością w przetwarzaniu sygnałów jest przetwarzanie sygnału o naturze
analogowej do postaci cyfrowej. Proces ten polega na zamianie wielkości analogowej na ciąg
dyskretnych wartości w zadanych chwilach czasowych. Operacja ta nie wnosi nowych
informacji o sygnale, czasem może prowadzić do utraty pewnej ilości informacji.
Przetwarzanie analogowo-cyfrowe sygnałów składa się z dwóch podstawowych czynności:
−
kwantowanie sygnału,
−
dyskretyzacja sygnału.
0
1
2
3
4
5
6
7
8
n
∆
t
t
1
2
3
4
5
6
7
(0,4) (1,7) (2,6) (3,2)
(4,1) (5,4) (6,7) (7,5)...(n,7)
X
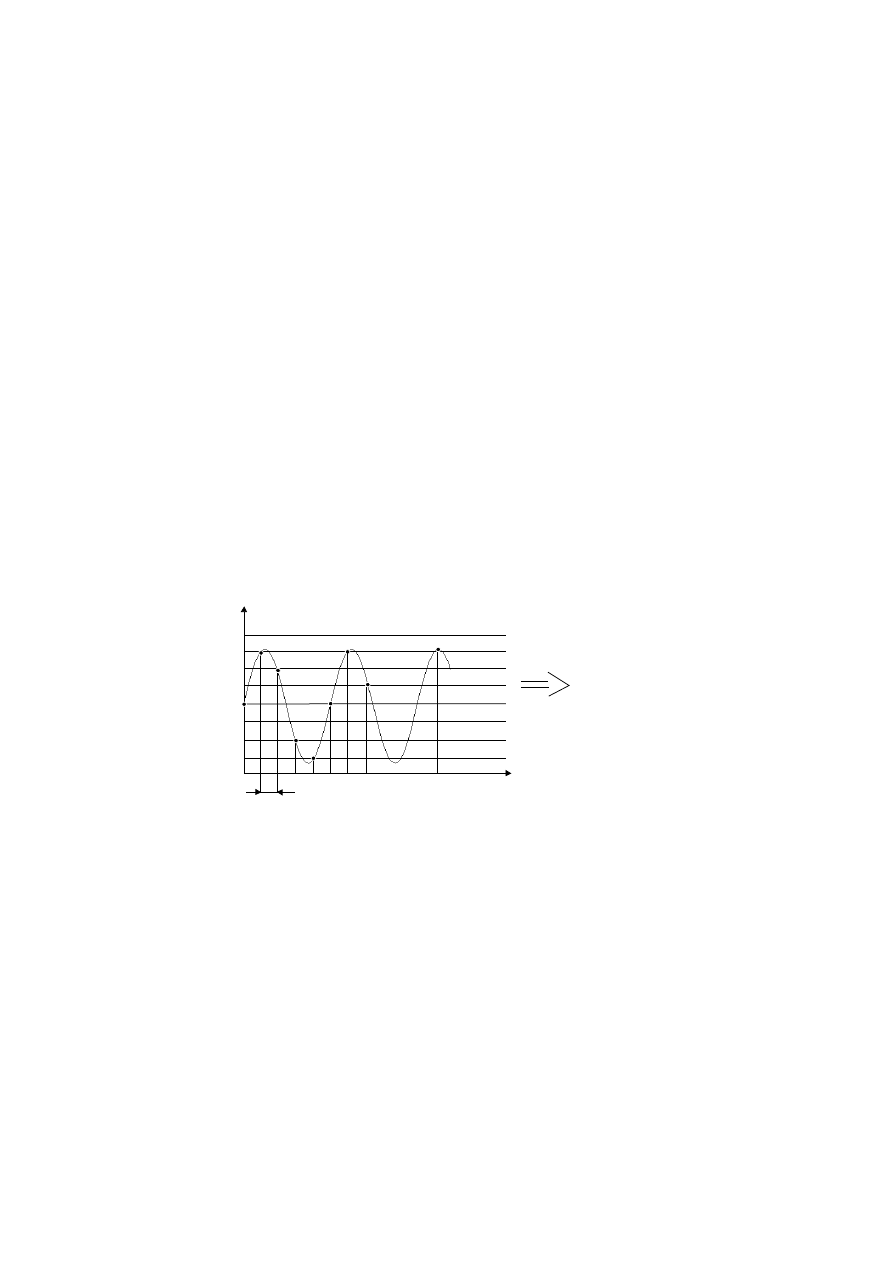
Rys. 1 Schematyczne przedstawienie procesu przetwarzania analogowo
−
cyfrowego.
Dyskretyzacja sygnału polega na wyborze na osi czasu dyskretnych chwil czasowych, w
których określona jest wartość amplitudy sygnału w procesie przetwarzania. Dyskretyzacja
sygnału odbywa się z okresem próbkowania zależnym od wymaganych parametrów analizy,
zakresu częstości w analizowanym sygnale tak, aby spełnione było twierdzenie Shanona o
próbkowaniu sygnałów. Twierdzenie to mówi, że: "Sygnał nie zawierający częstości
większych niż f
N
(częstość graniczna) może być jednoznacznie opisany za pomocą
dyskretnych próbek, otrzymanych przez próbkowanie analizowanego sygnału z częstością
f
f
S
N
≥
2
" W praktyce częstość f
S
jest 4 do 10 razy większa niż częstość f
N
.
Kolejną czynnością jest kwantyzacja polegająca na zamianie wartości analogowej na postać
cyfrową o wartości całkowitej związanej z ustalonym poziomem kwantyzacji.. Przetwarzanie
analogowo-cyfrowe sygnałów jest wykonywane za pomocą specjalizowanych układów
elektronicznych.

Przykłady związane z doborem częstotliwości próbkowania
Odpowiedni dobór częstotliwości próbkowania:
f1 = 1; % Częstotliwości przykładowych przebiegów sinusoidalnych
f2 = 4;
f3 = 6;
fs = 200; % Częstotliwość próbkowania sygnału
t=0:(1/fs):1; % Wektor czasu
% Definicje przykładowych przebiegów sinusoidalnych
x1 = sin(2*pi*f1*t);
x4 = -sin(2*pi*f2*t);
x6 = sin(2*pi*f3*t);
plot(t,x1,t,x4,t,x6)
Wybór zbyt niskiej częstotliwości próbkowania:
fs = 5; % Częstotliwość próbkowania sygnału
t=0:(1/fs):1; % Wektor czasu
% Definicje przykładowych przebiegów sinusoidalnych
x1 = sin(2*pi*f1*t);
x4 = -sin(2*pi*f2*t);
x6 = sin(2*pi*f3*t);
plot(t,x1,t,x4,t,x6)
Kolejny przykład złego doboru częstotliwości próbkowania zawarty jest poniżej.
fs = 20; % Częstotliwość próbkowania sygnału
t=0:(1/fs):10; % Wektor czasu
x = sin(2*pi*40*t);
plot(t,x)
Przedstawiona w powyższych przykładach niejednoznaczność przetwarzania analogowo
cyfrowego jest podstawowym problemem przetwarzania sygnałów. Wynika ona z faktu, że w
przypadku gdy w sygnale znajdują się składowe o częstości większej niż f
S
/ 2 wówczas nie
mogą one być odtworzone w sposób jednoznaczny, a mogą mieć wpływ na wartość amplitudy
sygnału. Zjawisko to jest nazywane aliazingiem.
Aby uniknąć zjawiska aliazingu należy przed przetwarzaniem usunąć z sygnału wszystkie
składowe o częstości większej niż f
S
/ 2 . W tym celu stosuje się na etapie kondycjonowania
sygnału filtrację analogową za pomocą filtru dolnoprzepustowego, o częstości przepuszczania
mniejszej niż
f
S
2
. Ze względu na to, że nie istnieją filtry idealne o pionowym nachyleniu
zbocza, częstość graniczną filtru przyjmuje się w praktyce ok. 40 % f
S
. Nachylenie zbocza
filtru zależy od jego rzędu i dla najczęściej stosowanych filtrów typu Buttworta 6 rzędu
wynosi 48 dB na oktawę. Do bardzo efektywnych filtrów należą filtry Cautera, dla których
nachylenie zbocza wynosi 96 dB/oktawę.

Zastosowanie filtracji cyfrowej
W tej części przedstawiono możliwości toolboxu Signal Processing Toolbox (SPT) z zakresu
analizy i projektowania filtrów cyfrowych.
Splot i filtrowanie
Matematyczną podstawą filtracji jest splot. Matlabowska funkcja
conv
dokonuje
standardowego jednowymiarowego splotu dwóch wektorów.
conv([1 1 1],[1 1 1])
•
ans =
•
1 2 3 2 1
Splotu macierzy prostokątnych dla dwuwymiarowego przetwarzania sygnałów można
natomiast dokonać za pomocą funkcji
conv2
.
Sekwencja danych y(n) otrzymywana na wyjściu filtru cyfrowego jest splotem ciągu danych
wejściowych x(n) przez splot z odpowiedzią impulsowego filtru h(n):
∑
∞
− ∞
=
−
=
∗
=
m
)
m
(
x
)
m
n
(
h
)
n
)(
x
h
(
)
n
(
y
( 1 )
i może być interpretowana jako ruchoma średnia ważona wejścia.
Jeżeli odpowiedź impulsowa filtru cyfrowego h(n) oraz sygnał wejściowy x(n) mają
skończone długości, można wtedy dokonać filtracji za pomocą funkcji
conv
. Przykładowo
utworzono sygnał wejściowy x(n) jako wektor x, sygnał h(n) jako wektor h, a następnie
dokonano ich splotu.
x=randn(5,1);
h=[1 1 1 1]/4;
y=conv(h,x);
Funkcja przejścia filtru
Definicja funkcji przejścia filtru oparta jest na własnościach przekształcenia Z. Transformata
Z Y(z) z cyfrowego wyjścia filtru y(n) jest powiązana z transformacją Z X(z) wejścia x(n)
następującym wzorem:
)
z
(
X
z
)
1
na
(
a
...
z
)
2
(
a
1
z
)
1
nb
(
b
...
z
)
2
(
b
)
1
(
b
)
z
(
X
)
z
(
H
)
z
(
Y
na
1
nb
1
⋅
⋅
+
+
+
⋅
+
⋅
+
+
+
⋅
+
=
⋅
=
−
−
−
−
( 2 )
gdzie H(z) jest funkcją przejścia filtru. Stałe b(i) oraz a(i) są współczynnikami filtru, a
wartość na i nb reprezentuje rząd filtru. Współczynniki filtru są zebrane w dwóch wektorach:
b - dla licznika i a - dla mianownika. Według przyjętej konwencji Matlab używa wektora
wierszowego dla zapamiętania współczynników.
Uwaga: Indeksowanie współczynników w wektorach rozpoczyna się od liczby 1, zamiast od
0. Jest to standardowy schemat stosowanego w Matlabie sposobu indeksowania wektorów.
Filtrowanie przy pomocy funkcji
filter
W celu przedstawienia sposobu działania funkcji
filter
cofnijmy się do zależności (2). Po
pomnożeniu równania (2) przez mianownik ułamka i dokonaniu odwrotnej transformaty Z
otrzymuje się następującą zależność:
)
nb
n
(
x
)
1
nb
(
b
)
1
n
(
x
)
2
(
b
...
)
n
(
x
)
1
(
b
)
na
n
(
y
)
1
na
(
a
...
)
1
n
(
y
)
2
(
a
)
n
(
y
−
⋅
+
+
+
−
⋅
+
+
⋅
=
−
⋅
+
+
+
−
⋅
+
( 3 )
Z równania (3) wynika, że wartość y(n) można wyznaczyć znając wartości wejściowe x(n),
x(n-1), ...,x(n-nb):

)
na
n
(
y
)
1
na
(
a
...
)
1
n
(
y
)
2
(
a
)
nb
n
(
x
)
1
nb
(
b
...
)
1
n
(
x
)
2
(
b
)
n
(
x
)
1
(
b
)
n
(
y
−
⋅
+
−
−
−
⋅
−
−
⋅
+
+
+
−
⋅
+
⋅
=
( 4 )
( )
)
k
n
(
y
)
1
k
(
a
)
m
n
(
x
)
1
m
(
b
n
y
na
0
k
nb
0
m
−
⋅
+
−
−
⋅
+
=
∑
∑
=
=
Równanie (4) jest standardową reprezentacją filtru cyfrowego w dziedzinie czasu i nosi
nazwę tzw. równania różnicowego. Obliczenia rozpoczyna się dla y(1), zakładając zerowe
warunki początkowe. Algorytm obliczeń przedstawiają równania (5):
⋮
)
1
(
y
)
3
(
a
)
2
(
y
)
2
(
a
)
1
(
x
)
3
(
b
)
2
(
x
)
2
(
b
)
3
(
x
)
1
(
b
)
3
(
y
)
1
(
y
)
2
(
a
)
1
(
x
)
2
(
b
)
2
(
x
)
1
(
b
)
2
(
y
)
1
(
x
)
1
(
b
)
1
(
y
−
−
+
+
=
−
+
=
=
( 5 )
W tej formie filtr cyfrowy jest wprowadzany przez funkcję
filter
. Dla przykładu, prosty
rekurencyjny filtr dolnoprzepustowy z pojedynczym biegunem (zero wielomianu mianownika
funkcji przejścia H(z) (2)) jest dany jako:
b=1;
a=[1 -0.9];
gdzie wektory a i b reprezentują współczynniki filtru w formie funkcji przejścia. Filtr
realizowany jest poprzez wyrażenie:
y=filter(b,a,x);
Funkcja
filter
oblicza tyle próbek wyjściowych, ile jest próbek wejściowych, znaczy to, że
długość wektora y jest taka sama, jak długość wejściowego wektora x. Jeśli pierwszy element
a(1) nie jest 1, funkcja
filter
dzieli przez niego współczynniki uprzednio wyprowadzonych
równań różnicowych postaci (4).
Odpowiedź impulsowa
Odpowiedź impulsową (charakterystykę czasową) filtru cyfrowego otrzymujemy podając na
wejście filtru następujący ciąg próbek:
≠
=
=
1
n
dla
0
1
n
dla
1
)
n
(
x
W Matlabie funkcję impulsową, można wygenerować na wiele sposobów. Najprostszy to
wykonanie poniższego polecenia:
imp=[1 zeros(1,49)];
Odpowiedź impulsową prostego filtru o współczynnikach
b=1;
a=[1 -0.9];
otrzymamy
po wykonaniu polecenia:
h=filter(b,a,imp);
Funkcja
impz
w przyborniku upraszcza powyższą operację wybierając liczbę generowanych
punktów oraz tworząc wykres słupkowy odpowiedzi filtru (używając wewnętrznie funkcji
stem
):
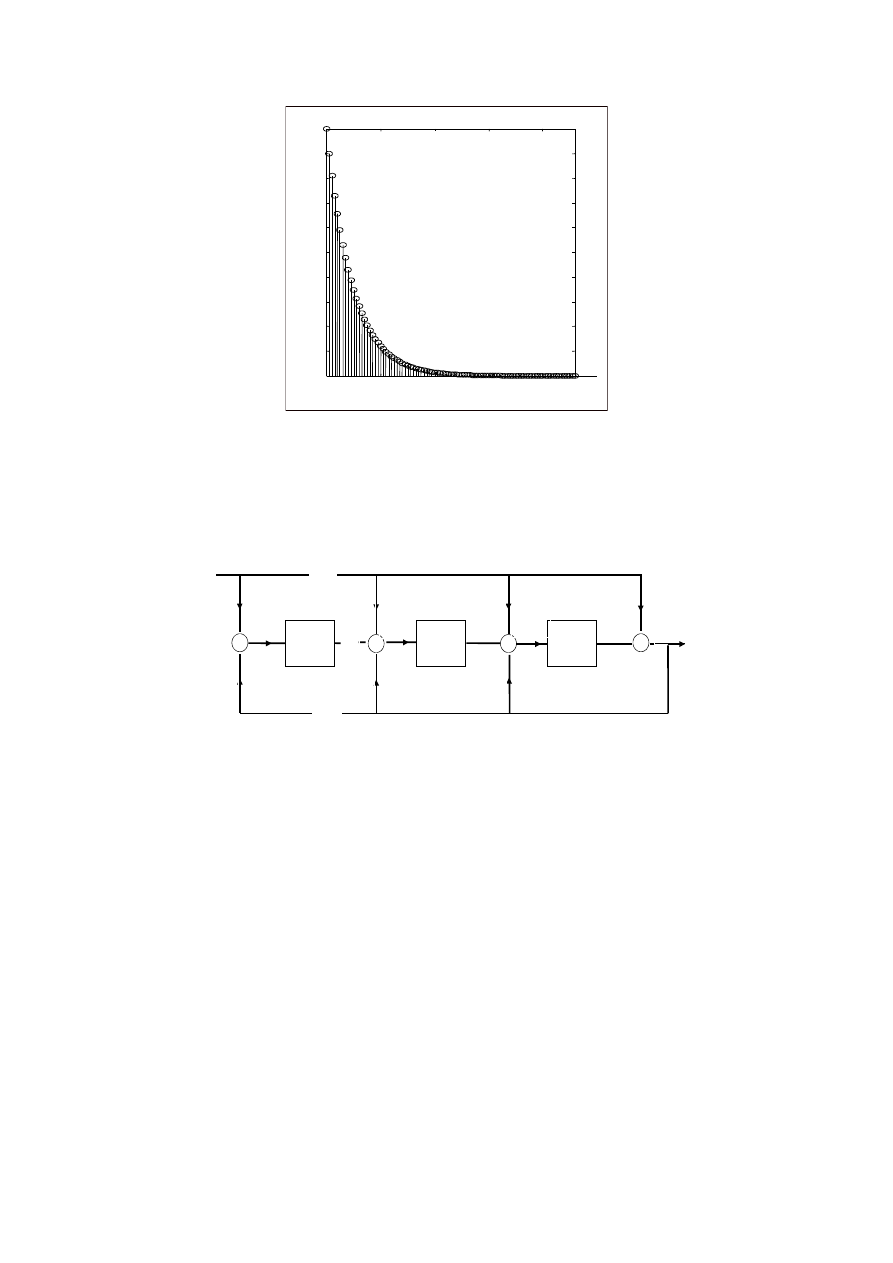
impz(b,a)
0
20
40
60
80
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Rys. 2 Odpowiedź impulsowa przykładowego filtru uzyskana za pomocą funkcji impz
Wykres pokazuje eksponencjalny rozkład 0.9
n
układu z pojedynczym biegunem.
Funkcja filter
Funkcja
filter
jest wprowadzana jako transpozycja struktury przedstawionej na rys. 3,
gdzie n-1 jest rzędem filtru.
Σ
Σ
Σ
Σ
z
n-1
(m)
z
-1
z
-1
z
-1
z
2
(m)
z
1
(m)
...
...
...
b(n)
b(1)
b(2)
b(3)
-a(n)
y(m)
-a(2)
-a(3)
x(m)
Rys. 3 Struktura blokowa filtru wprowadzanego w SPT
Jest to podstawowa forma filtru cyfrowego, posiadająca minimalną ilość elementów
opóźniających.
Przy m - tej próbce sygnału, funkcja
filter
rozwiązuje następujący układ równań
różnicowych:
)
m
(
y
)
n
(
a
)
m
(
x
)
n
(
b
)
m
(
z
)
m
(
y
)
1
n
(
a
)
1
m
(
z
)
m
(
x
)
1
n
(
b
)
m
(
z
)
m
(
y
)
2
(
a
)
1
m
(
z
)
m
(
x
)
2
(
b
)
m
(
z
)
1
m
(
z
)
m
(
x
)
1
(
b
)
m
(
y
1
n
1
n
2
n
2
1
1
−
=
−
−
−
+
−
=
=
−
−
+
=
−
+
=
−
−
−
⋮
⋮
( 6 )
W najbardziej podstawowej formie, funkcja
filter
wprowadza opóźnienia z
i
(1), i=1,...,n-1,
równe zero. Opóźnienia te można jednak nastawiać wprowadzając czwarty parametr
wejściowy w funkcji. Można także uzyskać dostęp do opóźnienia wprowadzanego przez
funkcję poprzez wykorzystanie drugiego parametru wyjściowego:
[y,zf]=filter(b,a,x,zi);
Dostęp do wyżej wymienionych parametrów jest użyteczny podczas filtrowania danych w
sekcjach, zwłaszcza gdy należy się liczyć z ograniczeniami pamięci. Przykładowe dane
zgromadzone zostały w dwóch segmentach po 5000 punktów każdy:
x1=randn(5000,1);
x2=randn(5000,1);
Załóżmy, że pierwsza sekwencja x1 odpowiada pierwszym 10 minutom danych, druga zaś x2
kolejnym 10 minutom. Cała sekwencja ma długość x = [x1;x2]. Jeśli nie posiadamy
wystarczającej ilości pamięci do przetworzenia całej sekwencji od razu, przefiltrujmy
podsekwencje jedna po drugiej. Do zapewnienia ciągłości filtrowanych danych, użyjmy
warunków końcowych z filtracji x1 jako warunków początkowych w wywołaniu filtracji x2:
[y1,zf]=filter(b,a,x1);
y2=filter(b,a,x2,zf);
W przyborniku dostępna jest również dodatkowa funkcja
filtic
, generująca zewnętrznie
warunki początkowe dla funkcji
filter
. Utwórzmy taką samą wartość opóźnienia jak w
przykładzie powyżej używając do tego celu funkcji
filtic
:
zf=filtic(b,a,flipud(y1),flipud(x1));
Ta funkcja jest użyteczna podczas filtracji krótkich sekwencji danych, ponieważ odpowiednie
warunki początkowe eliminują startowe stany nieustalone.
Podstawowe funkcje stosowane do filtracji
Oprócz funkcji
filter
w SPT znajdują się jeszcze dwie inne instrukcje, które dokonują
podstawowych operacji filtrowania. Są to
filtfilt
eliminująca zniekształcenia fazowe w
procesie filtrowania, oraz
fftfilt
, która dokonuje filtracji FIR (Finite Impulse Response) w
dziedzinie częstotliwościowej.
Ogólne zasady filtracji cyfrowej w Matlabie
Implementacja filtru FIR o liniowej fazie może być zrealizowane dla funkcji
filter
lub
conv
poprzez dodanie do sekwencji danych opóźnienia wyjścia o stałą liczbę próbek. Dla
filtrów IIR (Infinite Impulse Response) natomiast zniekształcenia fazowe są stosunkowo
duże. Funkcja
filtfilt
eliminuje te zniekształcenia, także w przypadku filtrów typu FIR.
Prześledźmy sposób działania funkcji
filtfilt
. Oznaczmy transformatę Z sekwencji x(n)
jako X(z) oraz transformatę Z sekwencji x(n) odwróconej w czasie jako X(1/z). Opisana
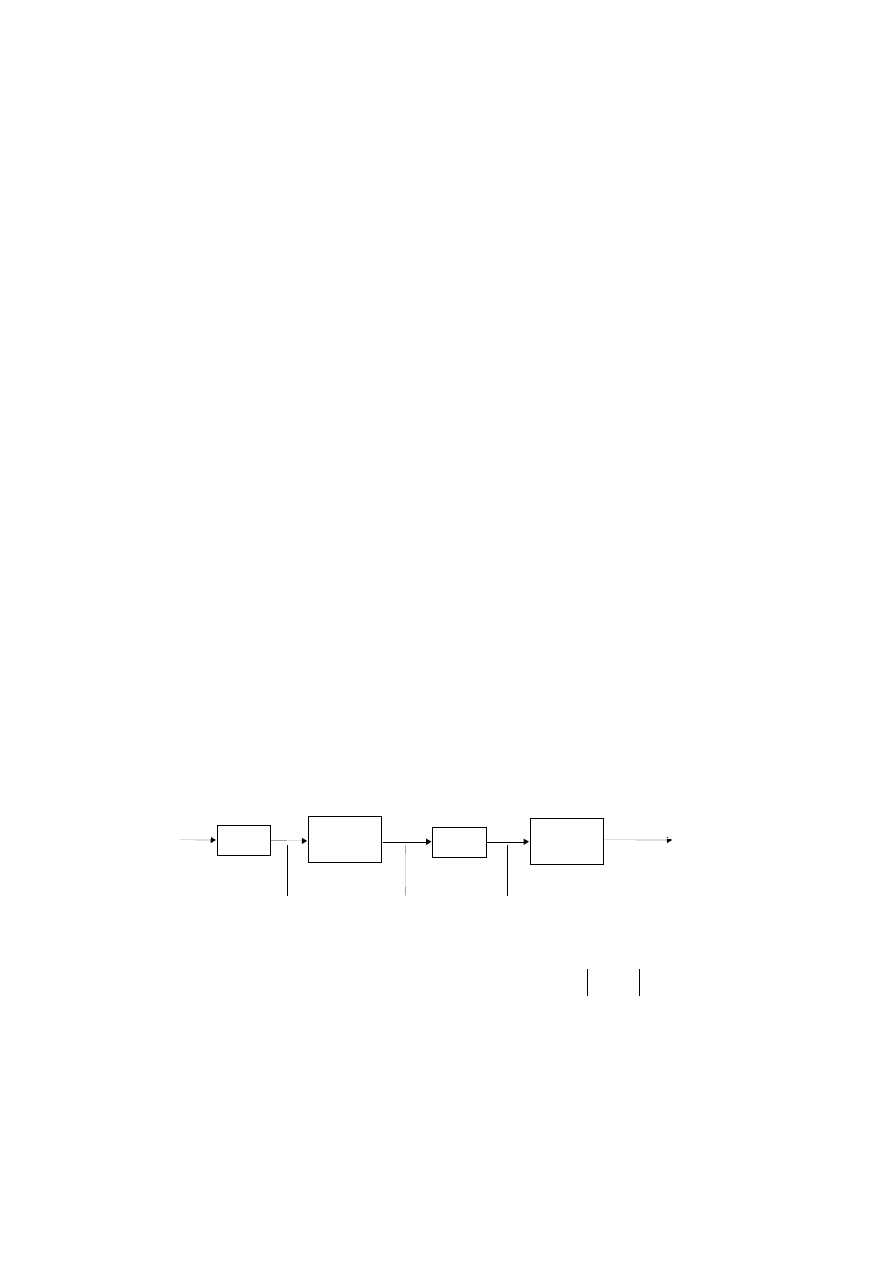
funkcja realizuje obliczenia według schematu przedstawionego na rys. 4.
Odwrotność
czasu
Odwrotność
czasu
H(z)
H(z)
X(z)
X(z)H(z)
X(1/z)H(1/z)
X(1/z)H(1/z)H(z)
Y(z)=X(z)H(z)H(1/z)
Rys. 4 Schemat działania funkcji filtfilt
Gdy
z
=1, co znaczy że z=e
j
ω
, wyjście redukuje się do:
2
j
j
)
e
(
H
)
e
(
X
ω
ω
⋅
. Wszystkie próbki
ciągu wyjściowego y(n) stanowią podwójnie przefiltrowany ciąg danych wejściowych x(n).
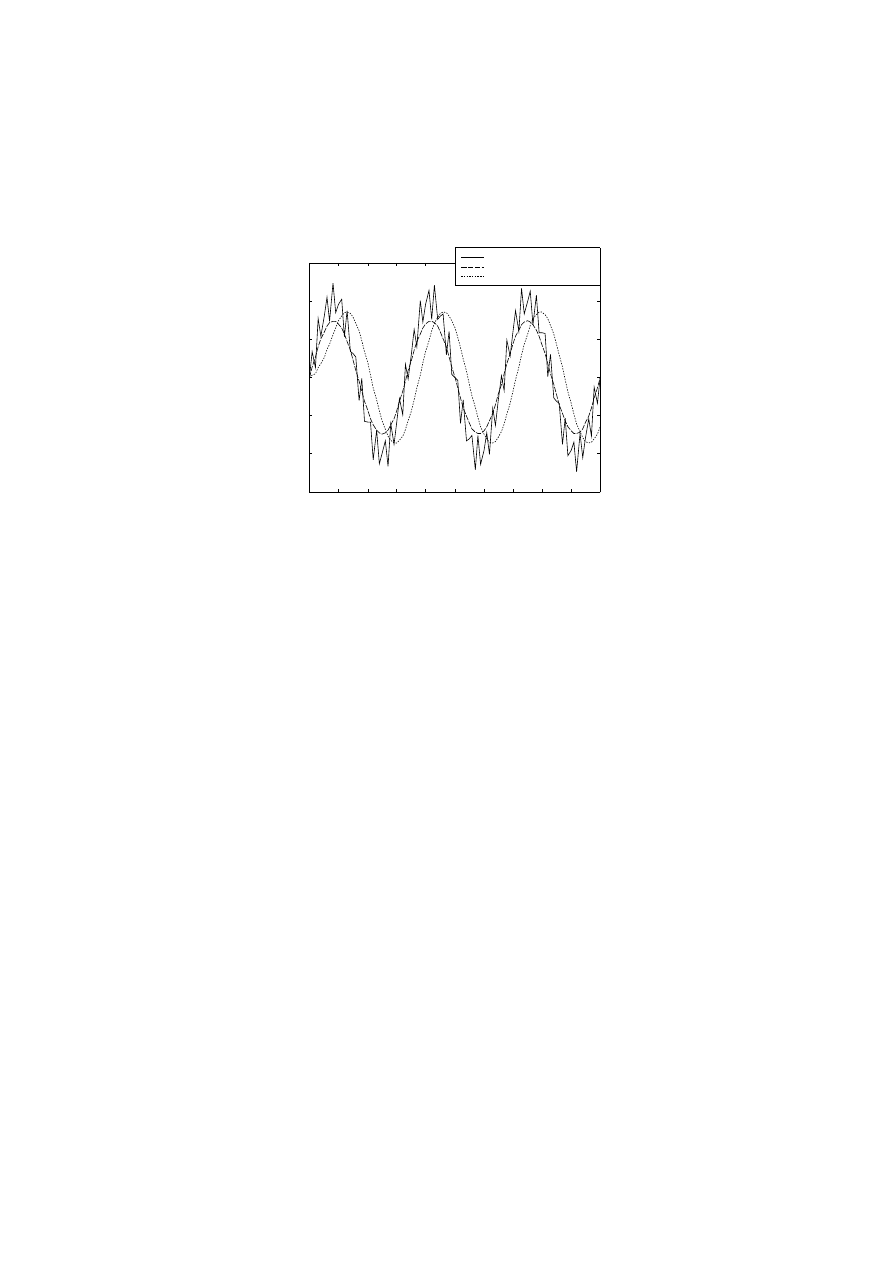
Dla przykładu przefiltrowano próbkę sygnału o długości 1 sekundy, próbkowanego z
częstotliwością 100 Hz, składającego się z dwóch sinusoidalnych składników, jednego o
częstotliwości 3 i drugiego o częstotliwości 40 Hz.
Fs=100;
t=0:1/Fs:1;
x=sin(2*pi*t*3)+0.25*sin(2*pi*t*40);
Utworzono również prosty uśredniający filtr FIR dziesiątego rzędu, a następnie
przefiltrowano sygnał
x
używając w tym celu obu funkcji
filtfilt
i
filter
.
b=ones(1,10)/10;
y=filtfilt(b,1,x);
yy=filter(b,1,x);
subplot(1,1,1);
plot(t,x,'black',t,y,'--black',t,yy,':black')
0
0 . 1
0 . 2
0 . 3
0 . 4
0 . 5
0 . 6
0 . 7
0 . 8
0 . 9
1
- 1 . 5
- 1
- 0 . 5
0
0 . 5
1
1 . 5
P r z e b i e g w e j c i o w y
ś
F i l t r a c j a f u n k c j f i l t f i l t
ą
F i l t r a c j a f u n k c j f i l t e r
ą
Rys. 5 Porównanie wyników filtracji sygnału dokonanej przez funkcje filtfilt i filter
Powyższy wykres pokazuje różnice pomiędzy zastosowaniem funkcji
filter
i
filtfilt
.
Obydwa filtry usunęły sinusoidę o częstotliwości 40 Hz z oryginalnego sygnału. Różnice
pomiędzy wykresami dotyczą zarówno ich amplitudy jak i fazy. Wynik działania funkcji
filtfilt
jest dokładnie w fazie z oryginalnym sygnałem o częstotliwości 3 Hz, podczas
gdy wynik funkcji
filter
jest przesunięty o około pięć próbek. W przypadku funkcji
filtfilt
także amplituda sygnału wyjściowego jest mniejsza, a to ze względu na kwadrat
modułu funkcji przenoszenia.
Funkcja
filtfilt
zmniejsza również wpływ stanów nieustalonych. Dla uzyskania
poprawnych wyników należy się upewnić, czy sekwencja przeznaczona do filtrowania,
posiada co najmniej trzykrotną długość rzędu filtru oraz czy kończy się zerami przy obydwu
brzegach.
Specyfikacja filtrów
Celem projektowania filtrów jest dokonanie zmian w zawartości składników
częstotliwościowych ciągu danych. Typowym wymaganiem może być np. usunięcie z
sygnału szumów o częstotliwościach powyżej 30 Hz z sekwencji danych próbkowanych z
częstotliwością 100 Hz. Ponadto w specyfikacji filtrów muszą być podane wymagania co do
szerokości pasma przepuszczania, tłumienia w paśmie zaporowym, dopuszczalnych
zniekształceń amplitudy lub fazy.
Dla wymagań, jak w przypadku podanym wyżej, wystarczający jest filtr typu Butterwortha
(IIR). Dla przykładu zaprojektowano filtr dolnoprzepustowy piątego rzędu, o częstotliwości
granicznej 30 Hz, dla danych wejściowych znajdujących się w wektorze
x
. Zaprojektowania
filtru i filtracji sygnału dokonano używając następujących poleceń:
[b,a]=butter(5,30/50);
y=filter(b,a,x);
Drugi argument wejściowy w funkcji
butter
wskazuje częstotliwość odcięcia filtru, która
jest normalizowana do połowy częstotliwości próbkowania (częstotliwość Nyquista).
Uwaga: Wszystkie funkcje Matlaba wykorzystujące filtry działają z normalizowaną
częstotliwością, więc nie jest wymagane podawanie częstotliwości próbkowania jako
dodatkowego argumentu. W przyborniku założono częstotliwości Nyquista jako jednostkową.
Normalizowana częstotliwość jest więc zawsze zawarta w przedziale 0
≤
f
≤
1. Dla układu z
częstotliwością próbkowania 1000 Hz, częstotliwość 300 Hz wynosi 300/500=0.6. W celu
przeliczenia znormalizowanej częstotliwości na częstość kątową (rad/s) mnożymy ją przez
π
.
By przeliczyć częstotliwość znormalizowaną na częstotliwość w [Hz], mnożymy ją przez
połowę częstotliwości próbkowania.
Najbardziej rygorystyczne wymagania stawiane filtrom zawierają takie parametry jak
dopuszczalne oscylacje w paśmie przepuszczania (Rp, w decybelach), tłumienie w paśmie
zaporowym (Rs, w decybelach), oraz stromość zbocza (Ws - Wp, w Hz)
0
Wp
Ws
10
10
-Rs/20
-Rp/20
A
m
pl
it
ud
a
fi
lt
ru
Częstotliwość
Rys. 6 Typowa charakterystyka filtru
Można zaprojektować filtry: Butterwortha, Chebyshewa typu I i typu II oraz filtr eliptyczny
spełniające te typy wymagań. Istnieją także funkcje w przyborniku estymujące minimalną
klasę filtru spełniającego żądane warunki.
Do wymagań zawierających bardziej rygorystyczne ograniczenia, jak np. liniowość fazy lub
stromość zbocza filtru, powinno stosować się filtry typu FIR lub typu IIR projektowane
bezpośrednio.
Projektowanie filtrów typu IIR
Zaletą filtrów IIR w stosunku do filtrów FIR jest to, że zapewniają większą stromość zbocza
przy mniejszym rzędzie filtru. Filtry IIR posiadają jednak nieliniową fazę, co jest zjawiskiem
negatywnym, jednak przetwarzanie danych w Matlabie jest realizowane głównie off line (tzn.
cała sekwencja dostępna jest przed rozpoczęciem operacji filtrowania). Sytuacja taka pozwala
na zastosowanie specjalnego rodzaju filtracji (funkcja
filtfilt
), w celu wyeliminowania
nieliniowych zniekształceń fazowych filtru IIR.
Klasyczne filtry IIR, a więc Butterwortha, Chebyshewa typu I i typu II, eliptyczny oraz filtr
Bessela, aproksymują w różny sposób idealny filtr „prostokątny”. Przybornik SPT zawiera
funkcje do tworzenia wszystkich tych typów klasycznych filtrów IIR w dziedzinach:
analogowej (ciągłej) i cyfrowej (dyskretnej) (z wyjątkiem filtru Bessela, który można
zrealizować jedynie w dziedzinie ciągłej). Przybornik umożliwia także skonfigurowanie filtru
jako dolnoprzepustowego, górnoprzepustowego, środkowoprzepustowego, lub
środkowozaporowego. Dla głównych typów filtrów można także znaleźć ich najmniejszy
rząd, spełniający zadane wymagania w części związanej z przepuszczaniem lub tłumieniem
oraz stromością zboczy.
Za pomocą funkcji
yulewalk
projektuje się filtry, których odpowiedź amplitudowa jest
aproksymacją zadanej funkcji. Pozwala ona więc na tworzenie filtrów pasmowych
niekoniecznie „prostokątnych”.
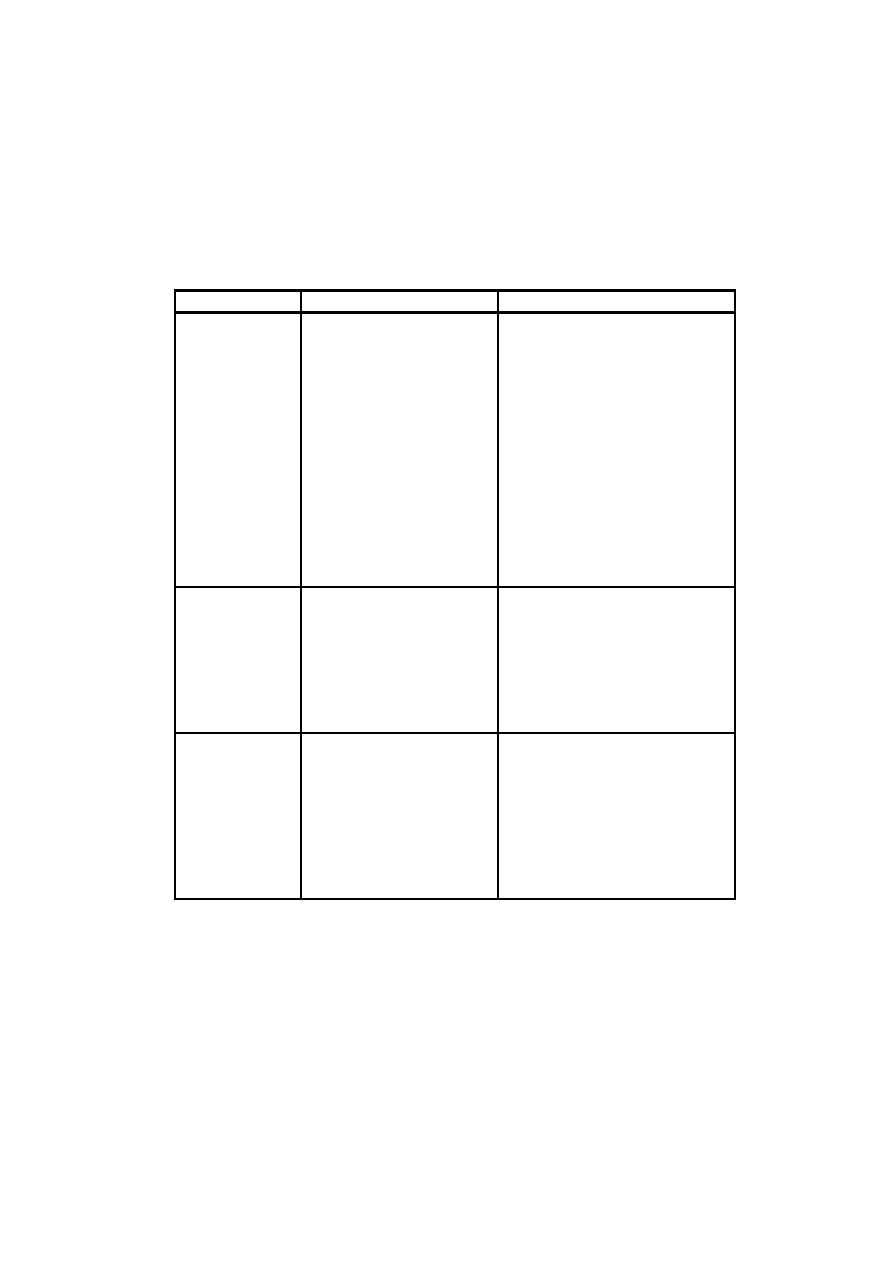
Tabela 1 Opisy konstrukcji filtrów IIR dostępnych w przyborniku.
Technika
Opis
Funkcja
Prototypo-
wanie
analogowe
Uzyskanie filtru
cyfrowego na podstawie
jego analogowego
dolnoprzepustowego
prototypu
unormowanego,
podanego w formie
transmitancji iloczynowej
modelu ciągłego
(Laplace’a), poprzez
transformację
częstotliwości i
dyskretyzację filtru.
Kompletne funkcje
projektujące:
bessel
,
butter
,
cheby1
,
cheby2
,
ellip
Klasa estymacji funkcji:
buttord
,
cheb1ord
,
cheb2ord
,
ellipord
Dolnoprzepustowe,
unormowane, analogowe
prototypy funkcji:
lp2lp
,
lp2hp
,
lp2bp
,
lp2bs
Funkcje dyskretyzujące filtry:
bilinear
,
impinvar
Projektowanie
bezpośrednie
Projektowanie filtrów
cyfrowych bezpośrednio
w dziedzinie dyskretnej
poprzez przybliżanie
charakterystyki
amplitudowej odcinkami
liniowymi.
youlewalk
Modelowanie
parametryczne
Projektowanie filtrów
cyfrowych, których
charakterystyka w
dziedzinie czasu lub
częstotliwości jest
przybliżeniem
charakterystyki
założonej.
Funkcje modelujące w
dziedzinie czasu:
lpc
,
prony
,
stmcb
Funkcje modelujące w
dziedzinie częstotliwości:
invfreqz
,
invfreqs
Do projektowania filtrów IIR można także zastosować metody modelowania
parametrycznego lub metody identyfikacji.
Filtry IIR projektowane poprzez prototypy analogowe
Podstawowa technika projektowania cyfrowych filtrów IIR wprowadzana w przyborniku
bazuje na przekształceniu klasycznego unormowanego analogowego filtru
dolnoprzepustowego na jego cyfrowy odpowiednik. Ten rozdział przedstawia metodę
projektowania oraz główne charakterystyki podstawowych typów filtrów.
Filtr dowolnego rzędu w konfiguracji dolnoprzepustowej, górnoprzepustowej,
środkowoprzepustowej lub środkowozaporowej, można łatwo utworzyć za pomocą funkcji
zestawionych w tabelce 2.
Standardowo każda z tych funkcji oblicza parametry filtru dolnoprzepustowego, należy
jedynie podać wymaganą częstotliwość odcięcia Wn w znormalizowanej częstotliwości
(częstotliwość Nyquista = 1 Hz). Dla filtru górnoprzepustowego należy dołączyć parametr
‘high’. Dla filtrów środkowozaporowych i środkowoprzepustowych należy zadać Wn jako
dwuelementowy wektor, zawierający częstotliwości krawędzi pasma przepuszczania. Dla
konfiguracji środkowozaporowej dodatkowo należy dołączyć parametr ‘stop’.
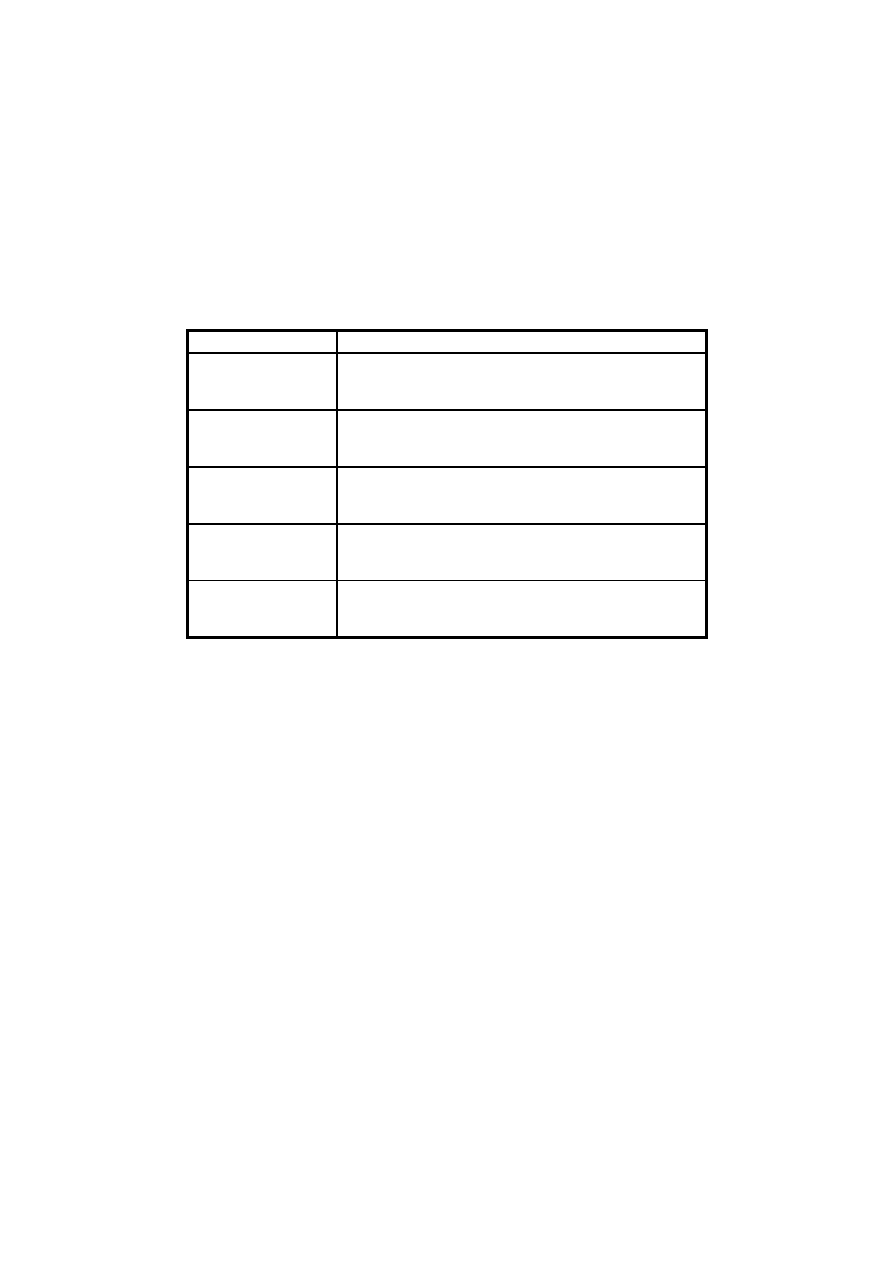
Tabela 2 Zestawienie funkcji do projektowania filtru IIR
Filtr
Funkcje projektujące
Butterwortha
[b,a]=butter(n,Wn,opcje)
[z,p,k]= butter(n,Wn,opcje)
[A,B,C,D]= butter(n,Wn,opcje)
Chebyshewa typ I
[b,a]=cheby1(n,Rp,Wn,opcje)
[z,p,k]= cheby1(n,Rp,Wn,opcje)
[A,B,C,D]= cheby1(n,Rp,Wn,opcje)
Chebyshewa typ II
[b,a]=cheby2(n,Rs,Wn,opcje)
[z,p,k]= cheby2(n,Rs,Wn,opcje)
[A,B,C,D]= cheby2(n,Rs,Wn,opcje)
Eliptyczny
[b,a]=ellip(n,Rp,Rs,Wn,opcje)
[z,p,k]= ellip (n,Rp,Rs,Wn,opcje)
[A,B,C,D]= ellip (n,Rp,Rs,Wn,opcje)
Bessela (jedynie
analogowy)
[b,a]=besself(n,Wn,opcje)
[z,p,k]= besself(n,Wn,opcje)
[A,B,C,D]= besself(n,Wn,opcje)
Przykłady tworzenia niektórych filtrów cyfrowych:
[b,a]=butter(5,0.4); - dolnoprzepustowy filtr Butterwortha
[b,a]=cheby1(4,1,[0.4 0.7]); - środkowoprzepustowy filtr Chebyshewa typu
I
[b,a]=cheby2(6,60,0.8,’high’); - górnoprzepustowy filtr Chebyshewa typu
II
[b,a]=ellip(4,1,60,[0.4,0.7],'stop');
- środkowozaporowy filtr eliptyczny
Do skonstruowania filtru analogowego (np. w celu jego symulacji) należy jako ostatni
dołączyć parametr ‘
s
’ i podać częstotliwość odcięcia w radianach na sekundę
[b,a]=butter(5,0.4,’s’); - analogowy filtr Butterwortha
Wszystkie przedstawione tu funkcje umożliwiają wyznaczenie parametrów równania filtru w
postaci funkcji przejścia, transmitancji iloczynowej lub przestrzeni stanu, zależnie od ilości
zadawanych argumentów wyjściowych.
Przybornik zawiera również funkcje obliczające minimalny rząd filtru, przy którym jeszcze
spełnia on zadane wymagania. Funkcje te zebrane zostały w tabelce 3. Są one bardzo
przydatne i często stosowane w połączeniu z funkcjami do konstrukcji filtrów.
Załóżmy, że poszukuje się filtru środkowoprzepustowego z pasmem przepuszczania od 1000
do 2000 Hz, pasmem zaporowym zaczynającym się przy 500 i 2500 Hz, o częstotliwość
próbkowania 10 000 Hz, z maksymalnie 1 dB błędem w paśmie przepuszczania i z co
najmniej 60 dB tłumieniem w paśmie zaporowym. Do konstrukcji użyto funkcji
buttord
.
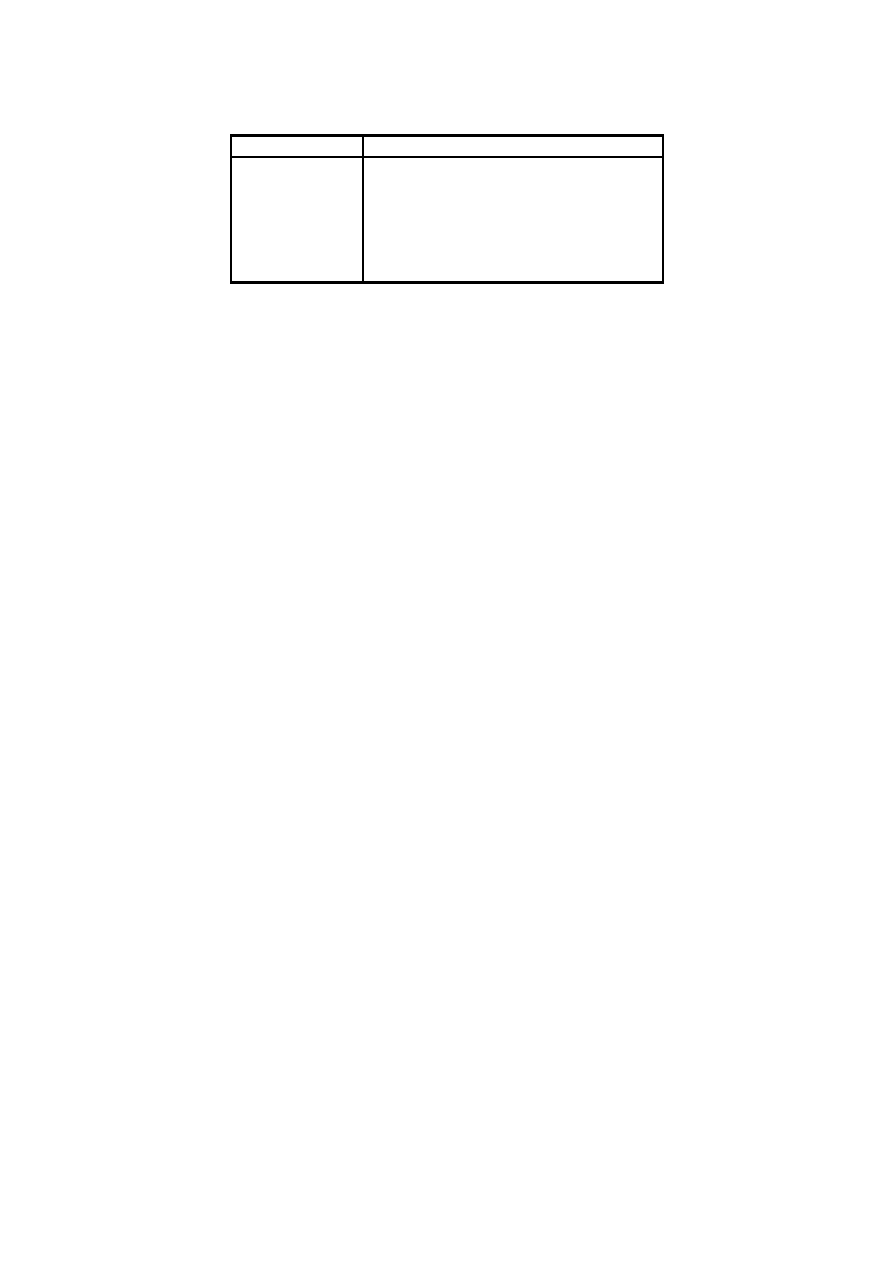
Tabela 3 Zestawienie funkcji wyznaczających minimalny rząd filtrów.
Typ filtru
Klasa estymacji funkcji
Butterworth
[n,Wn]=buttord(Wp,Ws,Rp,Rs)
Chebyshew typ
I
[n,Wn]=cheb1ord(Wp,Ws,Rp,Rs)
Chebyshew typ
II
[n,Wn]=cheb2ord(Wp,Ws,Rp,Rs)
Elliptic
[n,Wn]=ellipord(Wp,Ws,Rp,Rs)
[n,Wn]=buttord([1000 2000]/5000,[500 2500]/5000,1,60)
•
n =
•
12
•
Wn =
•
0.1951 0.4080
[b a]=butter(n,Wn);
Filtr eliptyczny, spełniający te same wymagania, jest dany przez funkcję
ellip
.
[n,Wn]=ellipord([1000 2000]/5000,[500 2500]/5000,1,60)
•
n =
•
5
•
Wn =
•
0.2000 0.4000
[b a]=ellip(n,1,60,Wn);
Przybornik dostarcza pięć typów klasycznych filtrów IIR, z których każdy jest w sensie
pewnego kryterium optymalny. W rozdziale tym pokazano podstawowe postacie
analogowych prototypów dla tych filtrów oraz podano ogólną charakterystykę każdego z
nich.
Bezpośrednie projektowanie filtrów IIR
W przyborniku użyto terminu metody bezpośrednie do opisu metody projektowania filtrów
IIR, która znajduje filtr bazując na stawianych mu wymaganiach w dziedzinie dyskretnej.
Metoda bezpośrednia, odmiennie niż metoda analogowego prototypowania, nie jest
ograniczona standardowymi konfiguracjami filtrów (dolno-, środkowo- czy górno-
przepustową). Służy ona raczej do projektowania dowolnych filtrów o zadanej odpowiedzi
częstotliwościowej.
Funkcja
yulewalk
zrealizowana w SPT umożliwia projektowanie rekursywnego cyfrowego
filtru IIR poprzez dopasowanie odpowiedzi częstotliwościowej filtru do zadanego kształtu.
Nazwa funkcji
yulewalk
pochodzi od metody znajdowania przez nią współczynników filtru.
Funkcja ta znajduje odwrotną transformatę FFT dla idealnego zadanego widma mocy i
rozwiązuje zmodyfikowane równania Yule-Walkera na podstawie znajomości funkcji
autokorelacji. Składnia funkcji ma postać:
[b,a]= yulewalk(n,f,m);
Oblicza ona rzędowe wektory b i a składające się z n+1 współczynników licznika i
mianownika filtru IIR n-tego rzędu, którego charakterystyki amplitudowo-częstotliwościowe
aproksymują dane zawarte w wektorach f i m.
Wektor f jest wektorem punktów częstotliwościowych zawartych w granicach od 0 do 1,
gdzie 1 reprezentuje częstotliwość Nyquista. Wektor m jest wektorem zawierającym zadaną
amplitudę odpowiedzi dla punktów o częstotliwościach zawartych w f. Wektory f i m mogą
opisywać każdy składający się z liniowych odcinków kształt odpowiedzi częstotliwościowej,
włączając w to także odpowiedzi wielopasmowe (rys 7). Odpowiednik filtrów FIR tej funkcji
to
fir2
, która także projektuje filtr o odpowiedzi amplitudowej bazującej na dowolnym
kształcie składającym się z liniowych odcinków.
Należy zauważyć, iż funkcja
yulewalk
nie zawiera informacji o fazie, oraz brak jest
instrukcji pozwalającej na optymalizację rezultatów filtracji.
Dla przykładu przedstawiono projekt filtru pasmowego wykonanego za pomocą funkcji
yulewalk
. Wynikowa i przybliżana odpowiedź częstotliwościowa zostały przedstawione na
wykresie.
m=[0 0 1 1 0 0 1 1 0 0];
f=[0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 1];
[b,a]=yulewalk(10,f,m);
[h,w]=freqz(b,a,128);
plot(f,m,'black-',w/pi,abs(h),'black:')
legend('Zadana funkcja dla filtru',...
'Uzyskana charakterystryka amplitudowa filtru')
0
0 . 2
0 . 4
0 . 6
0 . 8
1
0
0 . 2
0 . 4
0 . 6
0 . 8
1
1 . 2
1 . 4
Z a d a n a f u n k c j a d l a f i l t r u
U z y s k a n a c h a r a k t e r y s t r y k a a m p l i t u d o w a f i l t r u
Rys. 7 Porównanie kształtu charakterystyki zadanej i uzyskanej przy pomocy funkcji youlewalk
Projektowanie filtrów typu FIR
Cyfrowe filtry ze skończonym czasem trwania odpowiedzi impulsowej (filtry FIR) mają w
porównaniu z filtrami dającymi nieskończoną odpowiedź impulsową (IIR) zarówno zalety jak
i wady.
Podstawowe zalety filtrów FIR to:
•
liniowa faza,
•
duża stabilność,
•
startowe warunki początkowe filtru posiadają skończony czas trwania.
Główną wadą filtrów FIR jest to, że często wymagają dużo wyższego rzędu niż filtry IIR do
osiągnięcia podobnych własności. Opóźnienie wprowadzane przez te filtry jest często dużo
większe niż dla podobnych filtrów typu IIR.
Liniowość fazy
Funkcje projektujące filtry FIR, konstruują filtry z liniową fazą. Współczynniki takiego filtru
posiadają parzystą lub nieparzystą symetrię. Zależnie od rodzaju tej symetrii oraz od tego, czy
rząd n filtru jest parzysty czy nieparzysty, liniowa faza filtru (zawarta w wektorze b o
długości n+1) posiada pewne ograniczenia co do jego charakterystyki amplitudowo-
częstotliwościowej.
Opóźnienia fazowe oraz opóźnienia grupowe filtrów FIR z liniową fazą są sobie równe i stałe
w całym paśmie przepuszczania. Dla n-tego rzędu takiego filtru całkowite opóźnienie
grupowe jest 2/n, a filtrowany sygnał jest opóźniony o 2/n (moduł jego transformaty Fouriera
jest skalowany przez odpowiedź amplitudową filtru). Te właściwości zabezpieczają kształt
przebiegu w paśmie przepuszczania, to znaczy nie wprowadzają dodatkowych zniekształceń
fazowych.
Funkcje
fir1
,
fir2
,
firls
, oraz
remez
umożliwiają projektowanie dolno-, górno-,
środkowoprzepustowych oraz środkowozaporowych filtrów FIR. Wszystkie one umożliwiają
dobór standardowych filtrów z liniową fazą typu I oraz II.
Uwaga: Ponieważ charakterystyka amplitudowo-częstotliwościowa filtrów typu II jest równa
zero przy częstotliwości Nyquista, za pomocą funkcji
fir1
nie może projektować filtrów
typu II w wypadku filtru górnoprzepustowego i środkowozaporowego. Dla parzystej wartości
n w tym przypadku,
fir1
dodaje jeden do rzędu filtru i tym samym tworzy filtr typu I.
Funkcje
firls
i
remez
umożliwiają projektowanie filtrów FIR z liniową fazą typu III i IV
pod warunkiem, że zostanie w ich wywołaniach zadany parametr 'hilbert' lub 'differentiator'.
Metoda okien
Rozważmy idealny, dolnoprzepustowy filtr cyfrowy z częstotliwością odcięcia
ω
0
[rad/s].
Moduł tego filtru wynosi jeden dla wszystkich częstotliwości z amplitudą mniejszą niż
ω
0
oraz zero dla częstotliwości z amplitudą pomiędzy
ω
0
i
π
. Jego odpowiedź impulsowa h(n)
wynosi:
)
n
(
c
sin
d
e
2
1
d
e
)
(
H
2
1
)
n
(
h
0
0
n
j
n
j
⋅
π
ω
⋅
π
ω
=
ω
⋅
π
⋅
=
ω
ω
⋅
π
⋅
=
∫
∫
ω
ω
−
ω
π
π
−
ω
( 7 )
gdzie n zmienia się od -
∞
do +
∞
.
Filtr ten nie jest realizowalny, ponieważ jego odpowiedź impulsowa jest nieskończona. W
celu utworzenia odpowiedzi impulsowej o skończonym czasie trwania należy zastosować
okno czasowe, ograniczające czas trwania h(n).
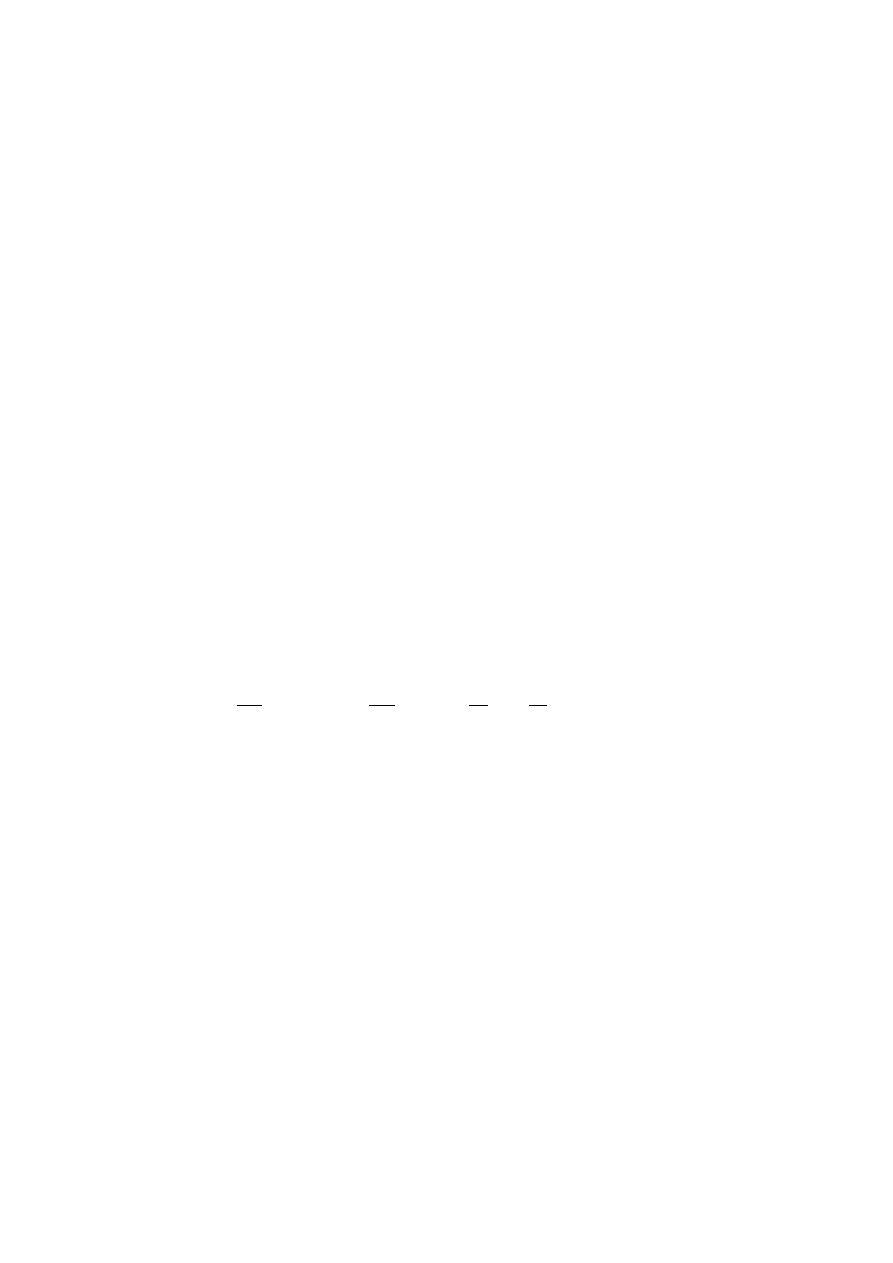
Przykładowy, filtr dolnoprzepustowy o długości 51 i częstotliwości odcięcia
ω
0.4
π
rad/sek
utworzony został za pomocą poniższej instrukcji:
b=0.4*sinc(0.4*(-25:25));
W tym przypadku do wyznaczenia odpowiedzi filtru zastosowano zwykłe okno prostokątne.
Według twierdzenia Parsevala spośród wszystkich filtrów o długości 51 ten z oknem
prostokątnym najlepiej przybliża idealny filtr dolnoprzepustowy.
Na wykresie (rys. 8) przedstawiono odpowiedź częstotliwościową tego filtru.
clf;
[H,w]=freqz(b,1,512,2);
plot(w,abs(H),'black'),
xlabel('Częstotliwość normalizowana do częst.
Nyquista'),
ylabel('Odpowiedź amplitudowa')
0
0.2
0.4
0.6
0.8
1
0
0.2
0.4
0.6
0.8
1
1.2
Częstotliwość znormalizowana do częstotliwości Nyquista
|H(j
ω
)|
Rys. 8 Charakterystyka częstotliwościowa przykładowego filtru dolnoprzepustowego
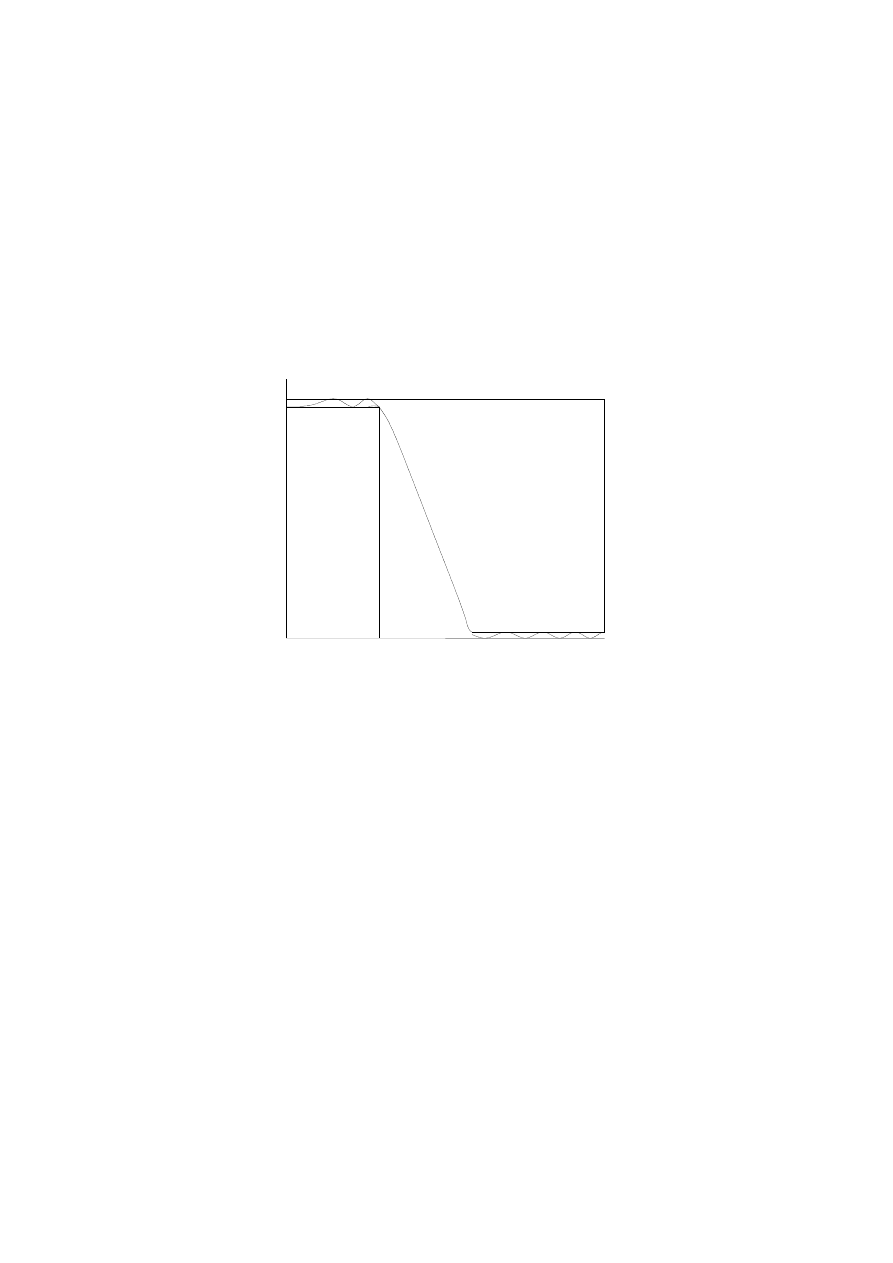
Na charakterystyce filtru, szczególnie w pobliżu krawędzi pasma, można zobaczyć oscylacje.
To zjawisko, nazywane efektem Gibbsa, nie znika dla wzrastającej długość filtru, ale
odpowiednie okno redukuje jego amplitudę. Mnożenie przez okno w dziedzinie czasu jest
równoważne splotowi lub wygładzaniu w dziedzinie częstotliwości.
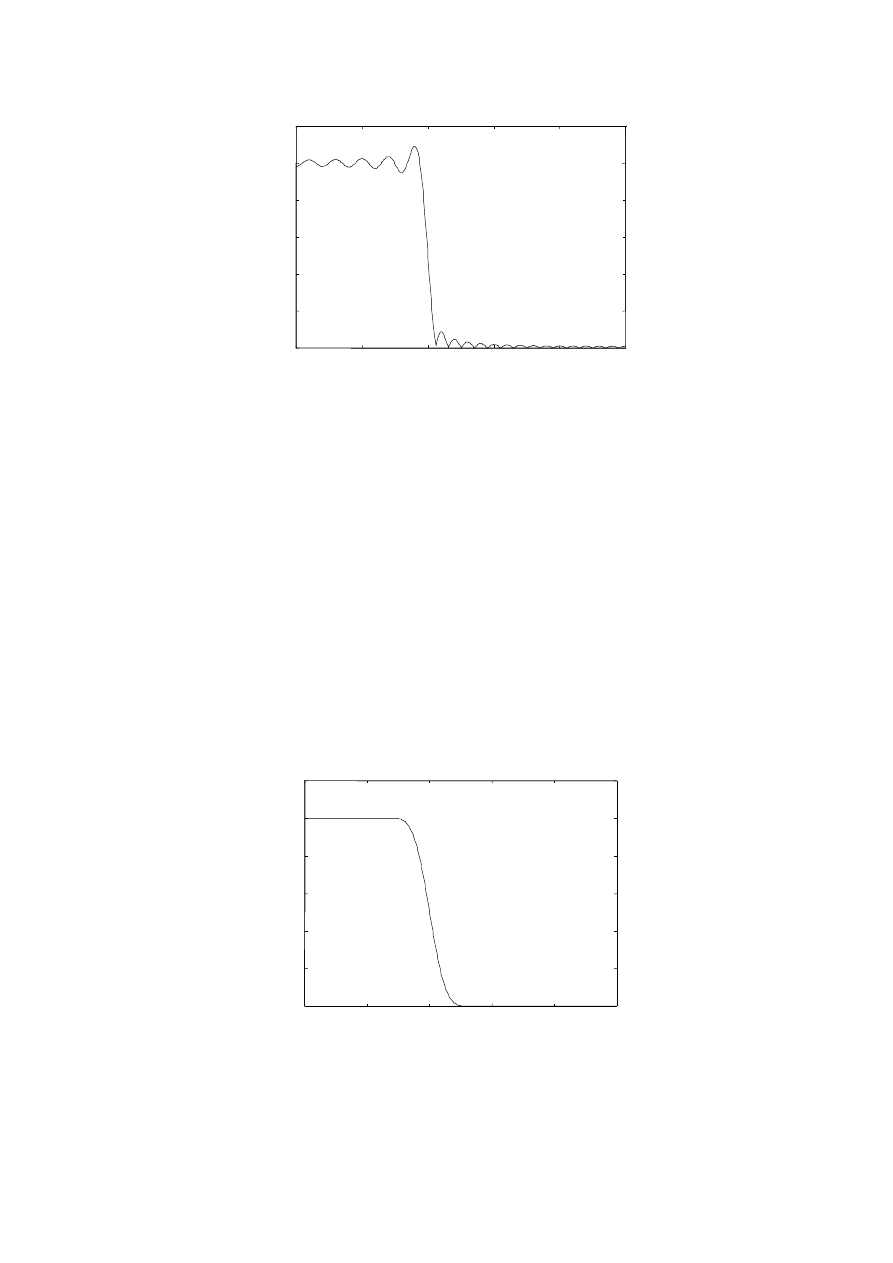
Przykładowo dla filtru zaprojektowanego w poprzednim punkcie zastosowano okno
Hamminga o długości 51.
b=b.*hamming(51)';
[H,w]=freqz(b,1,512,2);
clf;
plot(w,abs(H),'black')
xlabel('Częstotliwość normalizowana do częst.
Nyquista'),
ylabel('Odpowiedź amplitudowa')
Jak można zaobserwować (rys. 9), oscylacje w znacznym stopniu zostały zredukowane.
Zostało to jednak okupione zmniejszeniem się nachylenia charakterystyki filtru oraz
wzrostem błędu kwadratowego.
0
0.2
0.4
0.6
0.8
1
0
0.2
0.4
0.6
0.8
1
1.2
Częstotliwość znormalizowana do częstotliwości Nyquista
|H(j
ω
)|
Rys. 9 Charakterystyka częstotliwościowa filtru wygładzona widmem okna Hamminga
Funkcje
fir1
i
fir2
w procesie projektowania filtrów FIR bazują na stosowaniu okien
czasowych. Mając zadany rząd oraz opis wymaganego filtru, funkcje te obliczają odwrotną
transformację Fouriera odpowiedzi zadanego filtru i poddają ją działaniu wybranego okna

czasowego. Obie standardowo używają okna Hamminga, można jednak stosować w nich okna
czasowe innego typu.
Projektowanie filtrów FIR dla pojedynczego pasma; funkcja
fir1
Funkcja
fir1
stosuje klasyczną metodę związaną z zastosowaniem okien do projektowania
cyfrowych filtrów FIR z liniową fazą. Przypomina ona projektowanie filtrów IIR w tym
sensie, że sformułowana jest do tworzenia filtrów w standardowych: dolno-, środkowo-,
górnoprzepustowych oraz środkowozaporowych konfiguracjach.
Sekwencja instrukcji:
n=50;
Wn=0.4;
b=fir1(n,Wn);
tworzy wektor
b
, zawierający współczynniki filtru n-tego rzędu, zaprojektowanego z
zastosowaniem okna Hamminga. Jest to dolnoprzepustowy filtr FIR z liniową fazą, o
częstotliwości odcięcia
Wn
.
Wn
jest liczbą z zakresu 0
÷
1, przy czym 1 odpowiada
częstotliwości Nyquista czyli połowie częstotliwości próbkowania. Występuje tu różnica w
stosunku do innych metod, gdzie
Wn
odpowiada punktowi o 6 dB spadku amplitudy.
Dla uzyskania górnoprzepustowego filtru należy dołączyć do listy parametrów ciąg znaków
‘high’
. Podczas tworzenia filtrów środkowo-przepustowych lub środkowo-zaporowych,
należy zadać
Wn
jako dwuelementowy wektor składający się z częstotliwości krawędzi pasma
przepuszczania, dodając parametr
‘stop’
dla konfiguracji zaporowej.
Instrukcja
fir1(n,Wn,okno)
stosowana do projektowania filtru zawiera okno podane w
wektorze kolumnowym
okno
. Wektor ten musi mieć długość n+1. Jeśli parametr nie zostanie
zadany, funkcja
fir1
standardowo zastosuje okno Hamminga.
Projektowanie filtrów FIR pasmowych; funkcja
fir2
Funkcja
fir2
umożliwia projektowanie filtrów FIR korzystając z metody okien, pozwalając
uzyskać dowolnie ukształtowaną charakterystykę częstotliwościową, przybliżaną za pomocą
odcinków liniowych. Tym różni się funkcja
fir2
w stosunku do funkcji
fir1
, która
umożliwia projektowanie filtrów jedynie w standardowych konfiguracjach.
n=50;
f=[0 0.4 0.5 1];
m=[1 1 0 0];
b=fir2(n,f,m);
Funkcja
fir2
daje w wyniku wektor wierszowy
b
, składający się z
n
+1 współczynników
filtru FIR
n
-tego rzedu, którego charakterystyka amplitudowo-fazowa jest dana poprzez
wektor
f
i
m
, gdzie
f
jest wektorem punktów częstotliwościowych w zakresie od 0 do 1 (1
reprezentuje częstotliwość Nyquista), zaś
m
jest wektorem składającym się z zadanych
odpowiedzi amplitudowych w punktach podanych w wektorze
f
. Odpowiednikiem tej funkcji
dla filtrów IIR jest funkcja
yulewalk
, tworząca filtry o odpowiedzi amplitudowej, bazującej
na dowolnym kształcie aproksymowanym odcinkami.
Projektowanie pasmowych filtrów FIR z zadanym pasmem przepuszczania
Funkcje
firls
i
remez
wykorzystują bardziej ogólne metody umożliwiające zadawanie
idealnego filtru, który ma być aproksymowany przez filtr cyfrowy.
Firls
i
remez
tworzą
transformatory Hilberta, układy różniczkujące oraz inne filtry posiadające nieparzystą
symetrię współczynników (typy III i IV filtrów z liniową fazą). Pozwalają one także na
zadawanie obszarów przejść, w których błędy nie są minimalizowane, podczas gdy w
pozostałej części charakterystyki filtru minimalizacja taka jest dokonywana.

Funkcja
firls
jest rozszerzeniem funkcji
fir1
i
fir2
o minimalizację całkowego błędu
kwadratowgo pomiędzy zadaną a rzeczywistą odpowiedzią częstotliwościową.
Funkcja
remez
wykorzystuje algorytm Pearks-McClellana, który przy wykorzystaniu
algorytmu wymiany Remeza oraz teorii aproksymacji Chebyshewa umożliwia projektowanie
filtrów, których rzeczywista odpowiedź częstotliwościowa jest w sposób optymalny
dopasowana do zadanej. Filtry te są optymalne w tym sensie, że minimalizują maksymalny
błąd pomiędzy zadaną i rzeczywistą odpowiedzią częstotliwościową (nazywane często
filtrami minimaksowymi). Filtry projektowane tą drogą wykazują zachowanie stałych
oscylacji w ich odpowiedziach częstotliwościowych. Algorytm Parks-McClellana
projektujący filtry FIR jest jednym z najbardziej znanych i szeroko stosowanych w praktyce
projektowania filtrów FIR.
Składnia dla funkcji
firls
i
remez
jest taka sama, jedyne różnice występują w
zastosowanych algorytmach minimalizacji. W kolejnym przykładzie pokazano, jak można
projektować filtry przy pomocy funkcji
firls
i
remez
z uwzględnieniem tych różnic.
Standardowy sposób działania funkcji
firls
i
remez
w projektowaniu filtrów typu I i II z
liniową fazą zależy od tego, czy zadany rząd filtru jest parzysty czy nieparzysty. Przykładowy
filtr dolnoprzepustowy z amplitudą 1 dla zakresu częstotliwości od 0 do 0.4 Hz oraz
amplitudą 0 dla przedziału od 0.5 do 1 Hz, zadano za pomocą następujących przedziałów.
n=20;
f=[0 0.4 0.5 1];
m=[1 1 0 0];
b=remez(n,f,m);
W zakresie częstotliwości od 0.4 do 0.5 Hz, funkcja
remez
nie dokonuje minimalizacji
błędów, ponieważ jest to obszar nachylenia zbocza filtru. Minimalizacja błędu w tym paśmie
jest również możliwa, ale należy liczyć się z dłuższym procesem przejściowym.
Dla porównania metody najmniejszych kwadratów projektowania filtrów z minimaksowym
projektowaniem filtrów, użyto funkcji
firls
do zbudowania podobnego filtru, jak w
przykładzie poprzednim:
bb=firls(n,f,m);
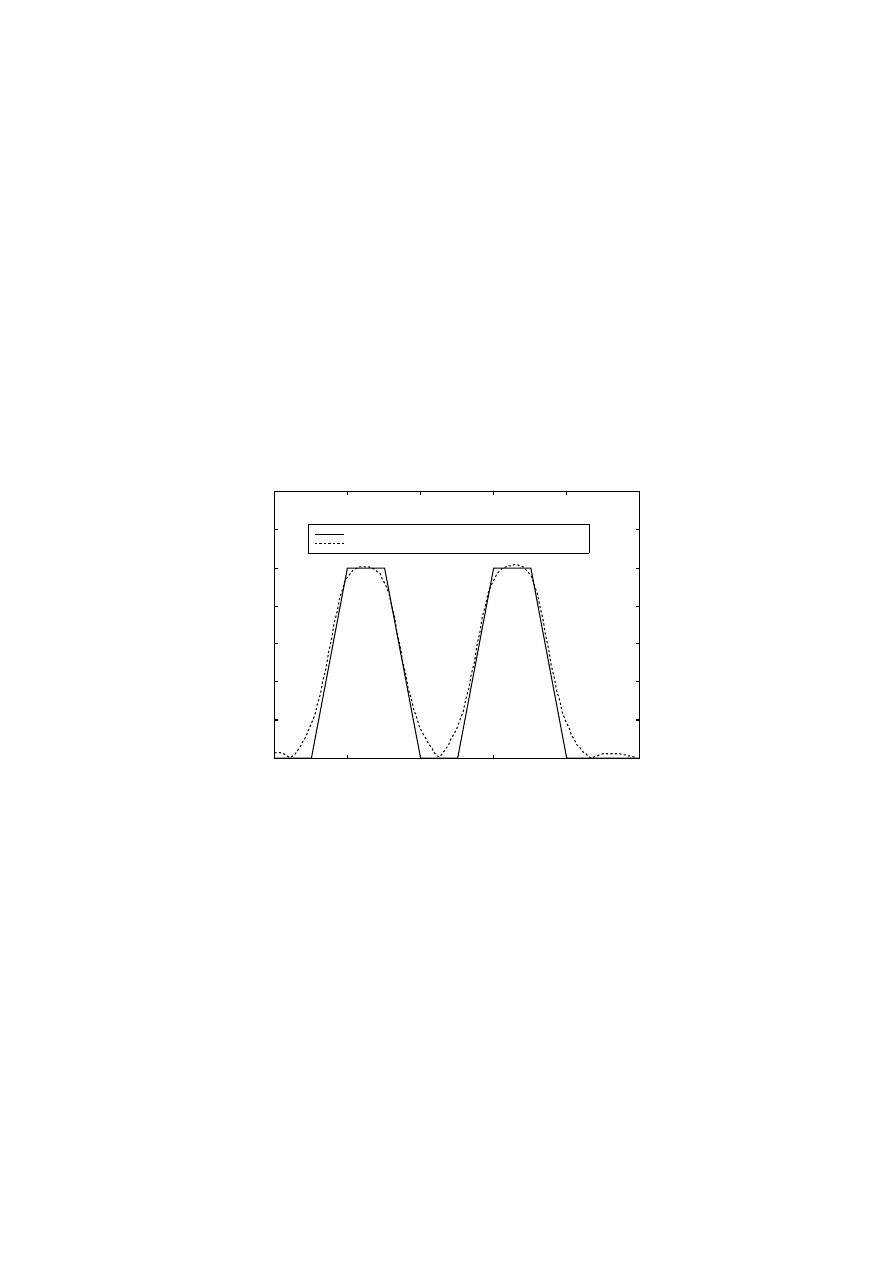
a następnie porównano ich charakterystyki częstotliwościowe.
[H,w]=freqz(b);
[HH,w]=freqz(bb);
plot(w/pi,abs(H),'black',w/pi,abs(HH),'black:')
grid
xlabel('Częstotliwość normalizowana do częst.
Nyquista'),
ylabel('Odpowiedź amplitudowa')
legend('Funkcja remez','Funkcja firls')
Na rysunku 10 można łatwo zauważyć, że filtr zaprojektowany za pomocą funkcji
remez
wykazuje stałe oscylacje tak w paśmie przepuszczania, jak i zaporowym. Filtr projektowany
funkcją
firls
posiada lepszy przebieg charakterystyki dla większej części obu pasm, ale
przy krawędziach (f=0.4 i f=0.5) jego charakterystyka ma przebieg dużo gorszy od
poprzedniego. Świadczy to o tym, że maksymalny błąd filtru
remez
ponad pasmem
przepuszczania i zaporowym jest mniejszy i w rzeczywistości ma on dla tej konfiguracji
krawędzi pasma i długości filtru wartość najmniejszą.
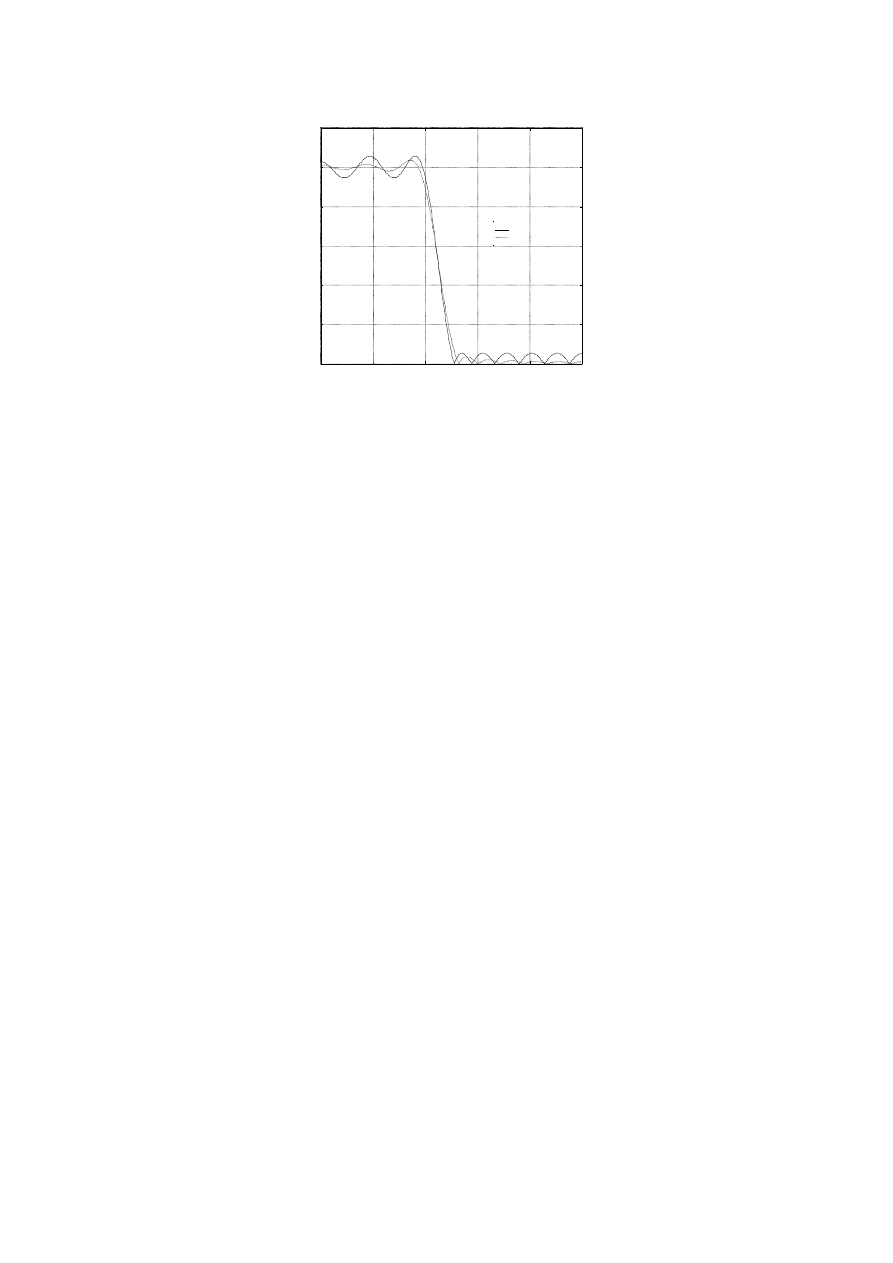
Funkcja remez
Funkcja firls
0
0.2
0.4
0.6
0.8
1
0
0.2
0.4
0.6
0.8
1
1.2
Częstotliwość znormalizowana do częstotliwości Nyquista
O
d
po
w
ie
d
ź
a
m
pl
itu
do
w
a
Rys. 10 Porównanie wyników działania funkcji remez i firls
W funkcjach
firls
i
remez
poszczególne pasma filtru traktowane są jako odcinki liniowe
reprezentujące przedziały częstotliwości. Bazując na funkcji o dowolnym kształcie,
składającym się z liniowych odcinków, można przedstawić filtr w dowolnej konfiguracji.
Funkcje
firls
i
remez
umożliwiają projektowanie filtrów dolno-, górno-,
środkowoprzepustowych oraz środkowozaporowych.
Przykłady parametrów dla wybranych filtrów zestawiono poniżej.
•
filtr środkowoprzepustowy:
f=[0 0.3 0.4 0.7 0.8 1];
m=[0 0 1 1 0 0];
(Wektory
f
i
m
definiuje się jako pięć pasm:
•
dwa zaporowe od 0.0 do 0.3 oraz od 0.8 do 1.0
•
pasmo przepuszczania od 0.4 do 0.7
•
dwa zbocza, od 0.3 do 0.4 i od 0.7 do 0.8 )
•
filtr górno- i środkowozaporowy:
f=[0 0.7 0.8 1];
m=[0 0 1 1];
f=[0 0.3 0.4 0.5 0.8 1];
m=[1 1 0 0 1 1];
•
filtr pasmowo-przepustowy:
f=[0 0.1 0.15 0.25 0.3 0.4 0.45 0.55 0.6 0.7 0.75 0.85 0.9 1];
m=[1 1 0 0 1 1 0 0 1 1 0 0 1 1];
Jeszcze innym przykładem zastosowania opisywanych funkcji jest projektowanie filtru,
posiadającego zbocze w formie liniowego połączenia pasma przewodzenia z zaporowym.
Zastosowanie takiego zabiegu może być pomocne w sterowaniu przeciekami odpowiedzi
amplitudowej przy słabo nachylonych zboczach.
f=[0 0.4 0.42 0.48 0.5 1];
m=[1 1 0.8 0.2 0 0];
Wektor wagi
Obie funkcje
firls
i
remez
pozwalają z różną wagą minimalizować błędy w pewnych
pasmach częstotliwości. Przykładowo, jeśli jako czwarty parametr w funkcji
remez
zostanie
podany wektor wagi
w=[1 10]
, zostanie zaprojektowany dolnoprzepustowy filtr z 10-krotnie
mniejszymi oscylacjami w paśmie zaporowym niż w paśmie przepuszczania.
n=20;
f=[0 0.4 0.5 1];
m=[1 1 0 0];
w=[1 10];
b=remez(n,f,m,w);
Wektor wagi jest zawsze połową długości wektorów
f
i
m
(musi być dokładnie jedna waga na
pasmo).
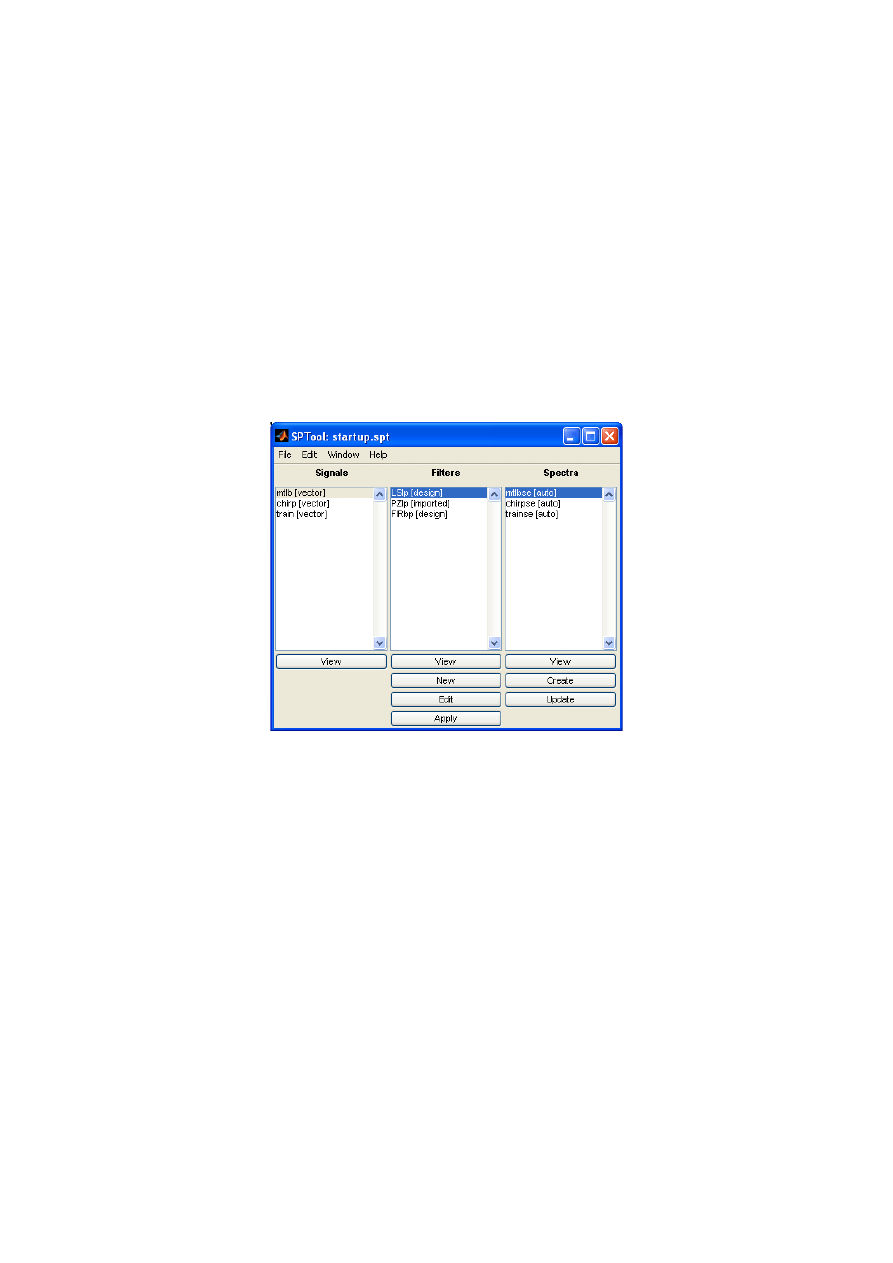
Projektowanie filtrów cyfrowych z wykorzystaniem narzędzi graficznych
W przyborniku SPT dostępne jest narzędzie udostępniające graficzny interfejs użytkownika
dla czynności opisywanych w poprzednich podpunktach konspektu. Narzędzie uruchamiane
jest poprzez wpisanie polecenia:
sptool;
w oknie poleceń Matlaba. Widok okna po uruchomieniu pokazany jest na rysunku 11.
Rys. 11 Widok okna narzędzia SPTool
Idea użycia narzędzia w celu wykonania filtracji sygnału jest następująca:
1. Sygnał obrabiany należy zaimportować do interfejsu (File ->Import...)
2. Utworzyć za pomocą narzędzi graficznych nowy projekt filtru (Przycisk New w
kolumnie Filters).
3. Zaprojektować filtr zgodnie z wymaganiami.
4. Zapisać utworzony projekt filtru.
5. Wykonać filtrację poprzez zaznaczenie w kolumnie Signals zaimportowanego sygnału
oraz w kolumnie Filters zaprojektowanego filtru. Operacja filtracji wykonywana jest
po naciśnięciu przycisku Apply.
Zadania do wykonania
1. Skomentować przykłady zaprezentowane w części konspektu dotyczącego doboru
częstotliwości próbkowania sygnału. Wyjaśnić krótko mechanizmy powstawania
niejednoznaczności w prezentowanych przypadkach.
2. Wygenerować kilkusekundowy sygnał będący złożeniem trzech przebiegów
sinusoidalnych o częstotliwościach: 10, 80 i 120 Hz. Amplitudy sygnałów powinny

znajdować się w proporcjach 1:3:1 oraz fazy powinny być przesunięte o ok. 20
o
.
Należy zwrócić szczególną uwagę na dobór próbkowania sygnału.
3. Zaprojektować filtry pozwalające na odfiltrowania kolejnych składowych ze sygnału.
Filtry powinny być wykonane każdorazowo w wersji IIR oraz FIR.
4. Wykonać porównanie parametrów zaprojektowanych filtrów zestawiając ze sobą filtry
FIR i IIR odpowiednio w konfiguracjach dolnoprzepustowych, pasmowych oraz
górnoprzepustowych.
5. Dla jednej wybranej konfiguracji filtru wykonać porównanie filtracji za pomocą
polecenia filter oraz filtfilt. Porównanie przedstawić w postaci graficznej poprzez
nałożenie na siebie:
•
sygnału oryginalnego – nieprzefiltrowanego,
•
sygnału odfiltrowanego poleceniem filter,
•
sygnału odfiltrowanego poleceniem filtfilt.
6. Na wygenerowany sygnał testowy uzyskany w punkcie 2 nałożyć sygnał szumu
losowego na poziomie 10% wartości amplitudy sygnału oraz skomentować wyniki
filtracji zaprojektowanymi wcześniej filtrami.
Document Outline
Wyszukiwarka
Podobne podstrony:
4.1.5 Przedstawianie sygnałów w dziedzinie czasu i częstotliwości, 4.1 Wprowadzenie do testowania ka
Laboratorium Elektroniki Pomiary sygnałów w dziedzinie czasu L Tykarski
4.1.6 Sygnały analogowe i cyfrowe w dziedzinie czasu i częstotliwości, 4.1 Wprowadzenie do testowani
tariov,podstawy transmicji?nych,Przetwarzanie sygnałów mowy
1f Cyfrowe przetwarzanie sygnal Nieznany
Przetwarzanie sygnałów sprawko
Analiza i przetwarzanie sygnałów1
A04 Przetwarzanie sygnalow I
zarzycki, algorytmy przetwarzania sygnałów ,algorytm Schura
2Filtry analogowe, Elektrotechnika AGH, Semestr V zimowy 2014-2015 - MODUŁ C, semestr V (moduł C), T
Systemy przetwarzania sygnałów sprawozdanie nr 1, WI, Semestr VI, Systemy przetwarzania sygnałów
30 Cyfrowe przetwarzanie sygnałów
zarzycki, algorytmy przetwarzania sygnałów ,metoda LPC
zarzycki, algorytmy przetwarzania sygnałów ,pytania i opracowanie
Systemy przetwarzania sygnałów sprawozdanie nr 6, WI, Semestr VI, Systemy przetwarzania sygnałów
L2 przetwarzanie danych
L2, przetwarzanie danych
Cyfrowe Przetwarzanie Sygnałów Wykład cz1
więcej podobnych podstron