Cyfrowe
Cyfrowe
Przetwarzanie
Przetwarzanie
Sygnałów
Sygnałów
dla kierunku: Informatyka
specjalność: Przemysłowe Systemy Informatyczne
cześć 1
Wybrane zagadnienia z teorii sygnałów
Dyskretyzacja sygnału analogowego
Odtwarzanie i obliczanie parametrów sygnału na podstawie
próbek
Instytut Metrologii Elektrycznej
UNIWERSYTETU ZIELONOGÓRSKIEGO
dr hab. inż. Jerzy Bolikowski, prof. UZ
OGÓLNA CHARAKTERYSTYKA PRZEDMIOTU
CPS
1-2
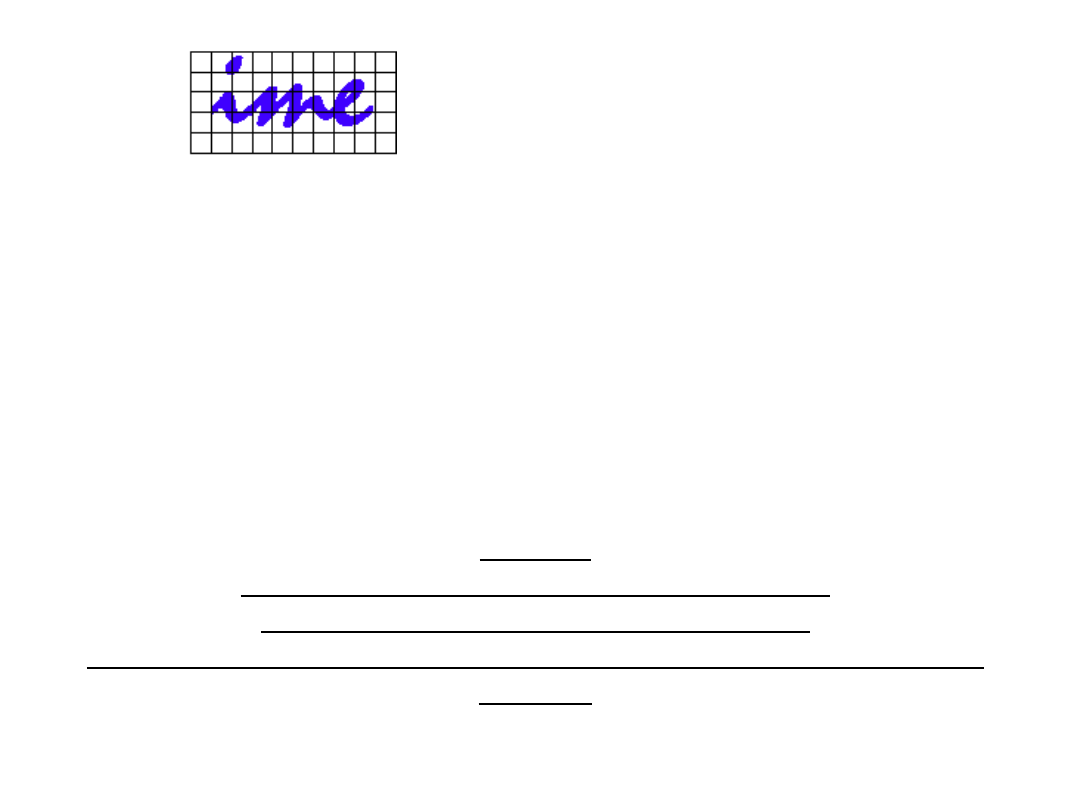
W otaczającym nas środowisku występuje wiele sygnałów fizycznych niosących informację na,
podstawie której podejmowane są różne decyzje. Organizm człowieka wyposażony jest w pięć kategorii
czujników: słuchu, dotyku, smaku, zapachu i wzroku. Czujniki te przetwarzają wielkości fizyczne w
sygnały elektryczne, które za pośrednictwem nerwów przesyłane są do „analogowego superkomputera”
jakim jest mózg. W większości przypadków decyzje podejmowane są samodzielnie przez człowieka.
Istnieją jednak sytuacje, w których niezbędne lub celowe jest wspomaganie człowieka przez urządzenia
elektroniczne, a przede wszystkim przez cyfrowy mikrokomputer. Aby komputer mógł przeprowadzić
odpowiednią analizę zawartej w sygnałach informacji (cyfrowe przetwarzanie sygnałów) do jego pamięci
muszą być wprowadzone liczby, które z wystarczającą dokładnością odwzorowują rzeczywiste sygnały.
Po przetworzeniu przez mikrokomputer rezultat obróbki ma postać sekwencji liczb. Praktyczne
wykorzystanie wyników cyfrowego przetwarzania sygnałów wymaga zazwyczaj przetworzenia ich w
postać analogową, a więc w sygnał elektryczny.
Operacje na sygnałach elektrycznych mogą
być
przeprowadzone
z
pominięciem
konwersji analogowo-cyfrowej a potem
cyfrowo-analogowej
przez
coraz
doskonalsze układy elektroniki analogowej
w
które
przemysł
półprzewodnikowy
zainwestował wielkie sumy pieniędzy.
Czym zatem uzasadnione jest coraz
powszechniejsze stosowanie
cyfrowego przetwarzania sygnałów?
W
ie
lk
o
śc
i
fi
zy
cz
n
e
czujniki
sygnały
elektryczne
przetwarzanie
analogowo-
cyfrowe
liczb
y
cyfrowe
przetwarzanie
sygnałów
przetwarzanie
cyfrowo-
analogowe
liczb
y
sygnały
elektryczne
LITERATURA PODSTAWOWA
•
Marven C., Evers G.: Zarys cyfrowego
przetwarzania sygnałów. WKiŁ. 1999.
•
Lyons R.G.: Wprowadzenie do cyfrowego
przetwarza-nia sygnałów. WKiŁ. 1999.
•
Szabatin J.: Podstawy teorii sygnałów. WKiŁ.
1982.
•
van de Plassche R.: Scalone przetworniki
analogo-wo-cyfrowe i cyfrowo-analogowe. WKiŁ.
1997.
•
Kulka Z., Libura A., Nadachowski M.:
Przetworniki analogowo-cyfrowe i cyfrowo-
analogowe. WKiŁ. 1987.
CPS
1-3
programowalność
możliwe jest skonstruowanie jednej konfiguracji sprzętowej, która przez zmianę
oprogramowania może służyć do realizacji różnych zadań cyfrowego przetwarzania
sygnałów. W technice analogowej do każdego zadania musi być zaprojektowany i
wykonany inny układ elektroniczny.
stabilność
algorytmy cyfrowego przetwarzania sygnałów (programy) są odporne na zmianę
warunków eksploatacji (temperatura, wilgotność, zakłócenia elektromagnetyczne,
procesy starzeniowe itp.). Dla poprawnej pracy układów analogowych wymagane jest
stosowanie często bardzo skomplikowanych metod i układów korygujących wpływ
czynników zewnętrznych.
powtarzalność
Programy realizujące algorytmy cyfrowego przetwarzania sygnałów działają identycznie
na różnych egzemplarzach tego samego urządzenia. Każdy układ analogowy, ze
względu na rozrzut parametrów tworzących go elementów, ma inne, mieszczące się w
pewnym zakresie, właściwości.
kompresja danych
Przy ograniczonej przepustowości kanałów transmisji zachodzi konieczność kompresji
danych. Przy wykorzystaniu cyfrowej transmisji danych istnieje możliwość bezstratnej
kompresji w przeciwieństwie do transmisji analogowej, gdzie kompresja danych
związana jest z utratą części informacji.
WŁAŚCIWOŚCI CYFROWEGO PRZETWARZANIA SYGNAŁÓW
CPS
1-4
SYGNAŁY I ICH KLASYFIKACJA
W rozumieniu teorii sygnałów,
sygnał
jest pojęciem abstrakcyjnym, modelem
matematycznym wyrażającym się określoną funkcją, przebiegiem stochastycznym lub
dystrybucją.
W technice
sygnał
definiowany jest jako funkcja czasowa dowolnej wielkości o
charakterze energetycznym, w którym można wyróżnić dwa elementy: nośnik i parametr
informacyjny.
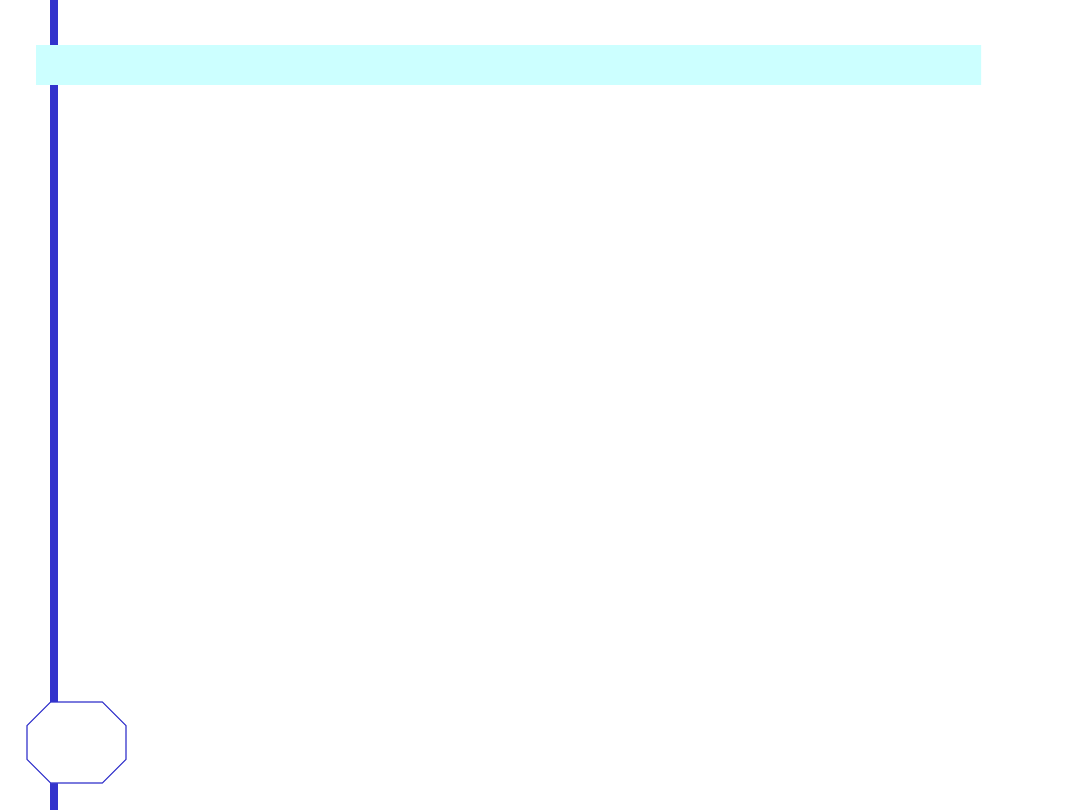
W teorii sygnałów stosowane są dwa, niezależne od siebie, sposoby podziału sygnałów. W
pierwszym sygnały dzieli się na deterministyczne i losowe; w drugim zaś rozróżnia się
sygnały: ciągłe i dyskretne.
sygnały deterministyczne
nieokresow
e
okresow
e
sinusoidalne
(harmoniczn
e)
niesinusoidalne
(poliharmoniczn
e)
niestacjonar
ne
sygnały losowe
stacjonarn
e
ergodyczne
nieergodyczne
Sygnałem ciągłym
w czasie jest
funkcja x(t), której dziedziną jest każdy
punkt pewnego przedziału osi czasu.
Sygnałem dyskretnym
w czasie jest
funkcja x[n], której dziedziną jest zbiór
liczb całkowitych.
Sygnałem deterministycznym
jest sygnał,
którego każda wartość jest jednoznacznie
określona za pomocą ścisłych zależności
matematycznych.
Sygnały opisane za pomocą procesu stochastycznego
nazywa się
sygnałami losowymi
, a konkretna funkcja
(sygnał) jest traktowana jedynie jako jedna z wielu
możliwych realizacji procesu stochastycznego.
Stacjonarnym
nazywany
jest
proces
stochastyczny,
którego
charakterystyki
statystyczne (wartość średnia, wartość średnia
kwadratowa, funkcja korelacji) nie są funkcjami
czasu.
Ergodycznym jest proces, którego dowolna
statystyczna charakterystyka, otrzymana ze
zbioru realizacji w dowolnej chwili, jest równa
podobnej charakterystyce otrzymanej z jednej
realizacji procesu obliczonej jako średnia w
dostatecznie długim czasie.
Na podstawie fundamentalnych praw lub w
rezultacie wielu obserwacji można opisać
dokładnie wartość syg-nału deterministycznego
w dowolnej chwili, również w przyszłości.
CPS
1-5
WYBRANE SYGNAŁY DETERMINISTYCZNE
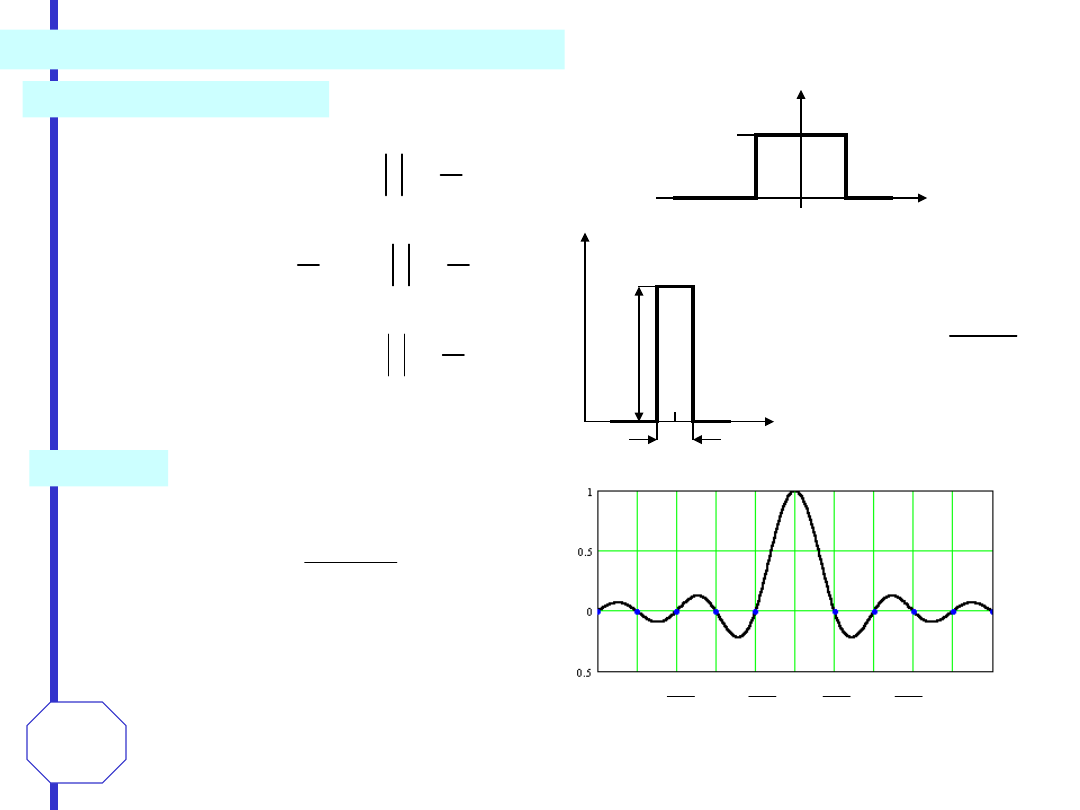
Impuls prostokątny (t)
x(t)
t
-1/2
1/2
0
1
2
1
dla
1
2
1
dla
2
1
2
1
dla
0
t
t
t
t
t
x
)
(
)
(
x(t)
b
c
a
t
b
c
t
a
t
x
)
(
Sygnał Sa
0
dla
1
0
dla
0
0
0
t
t
t
t
t
Sa
t
x
sin
)
(
0
0
3
0
3
0
CPS
1-6
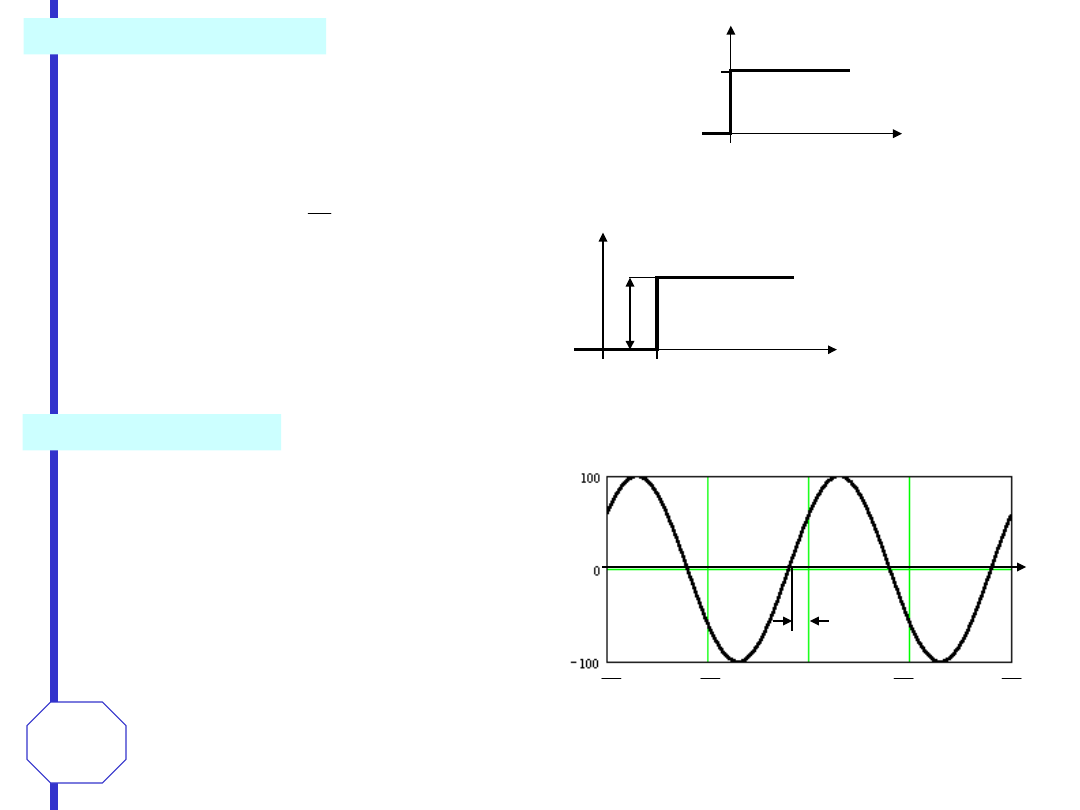
Skok jednostkowy - 1(t)
0
dla
0
0
dla
2
1
0
dla
1
1
t
t
t
t
t
x
)
(
)
(
x(t)
t
1
Skok sygnału o dowolną wartość i w
dowolnym punkcie osi czasu można
zapisać jako:
)
(
)
(
0
1
t
t
A
t
x
x(t)
A
t
0
t
Sygnał sinusoidalny
)
,
(
)
sin(
)
(
t
t
X
t
x
0
t
0
0
0
2
0
0
2
CPS
1-7
WYBRANE SYGNAŁY STOCHASTYCZNE
Sygnał harmoniczny stochastyczny
)
cos(
)
(
)
(
t
t
t
Konkretną realizacją sygnału
t jest sygnał harmoniczny deterministyczny
)
cos(
)
(
t
X
t
x
Zmienne losowe opisane odpowiednimi funkcjami gęstości prawdopodobieństwa
Szum śrutowy
i
i
t
k
t
)
(
)
(
Szum śrutowy jest przykładem sygnału z parametrem statystycznym;
jest ciągiem zmiennych losowych, których realizacje tworzą ciągi na osi
czasu, a k(t) jest sygnałem deterministycznym losowym. Można go traktować
jako sumę sygnałów impulsowych poprzesuwanych losowo względem siebie o
odcinki czasu . Szum śrutowy jest modelem matematycznym sygnałów
przypadkowych, których źródłem są zjawiska fizyczne związane z przepływem
prądu elektrycznego w elementach elektronicznych.
i
i
CPS
1-8
SYGNAŁY DYSTRYBUCYJNE
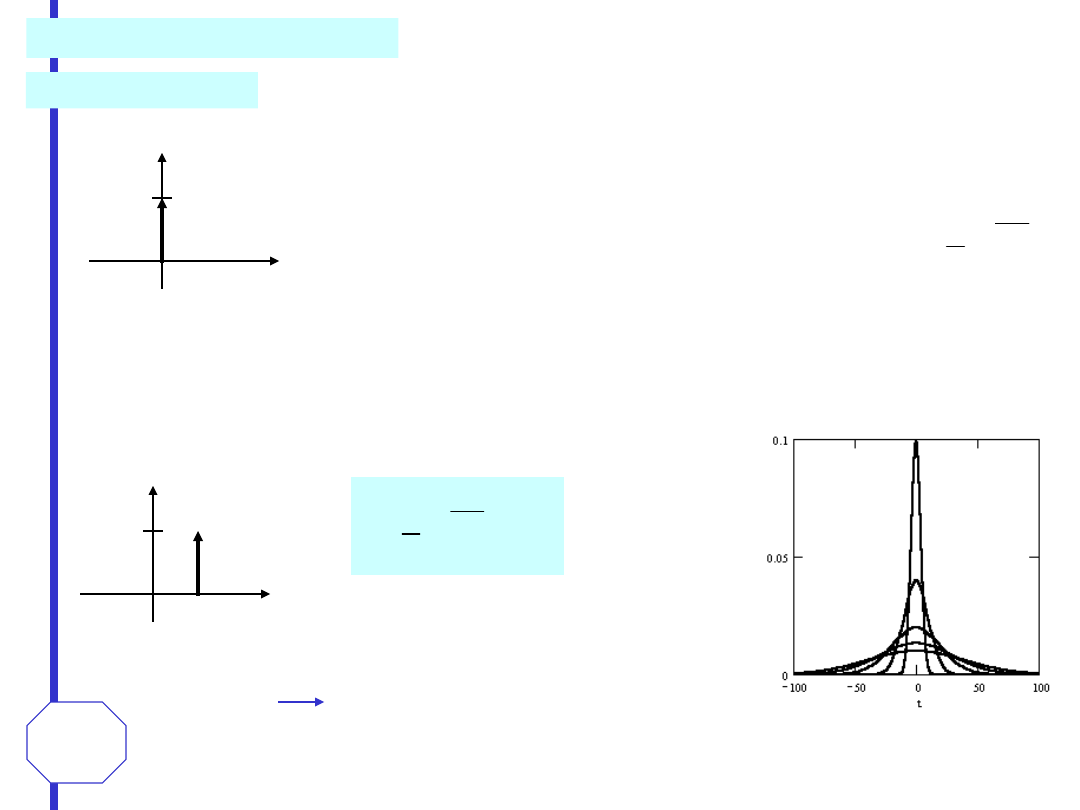
Delta Diraca - (t)
0
t
dla
0
t
dla
0
t
(t)
0
t
1
Dystrybucja Diraca (delta Diraca) jest modelem matematycznym
sygnału impulsowego o nieskończenie krótkim czasie trwania i
nieskończenie dużej amplitudzie. Sygnał taki nie jest realizowalny
fizycznie, ale stanowi wygodny abstrakcyjny model sygnału
fizycznego, którego przebieg ma kształt bardzo wąskiego
impulsu.
1
dt
t)
(
(t-t
0
)
0
t
1
t
0
Ciągiem definiującym dystrybucję d(t) może
być na przykład ciąg funkcji gaussowskich o
postaci:
2
2
1
t
e
t
)
,
(
Wraz ze zbliżaniem się parametru do zera funkcje gaussowskie
są coraz węższe, a jednocześnie rośnie ich wartość. W granicy
ciąg dąży do do wartości, która jest równa zeru dla t różnego od
zera i równa nieskończoności dla t = 0. Jednocześnie pole
ograniczone wykresem każdego elementu ciągu jest równe 1.
Zatem delta Diraca jest granicą ciągu funkcji gaussowskich
t
e
t
2
2
1
0
lim
Jeżeli x(t) jest dowolnym sygnałem, to
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
0
0
0
0
t
t
t
x
t
t
t
x
t
x
t
t
x
Właściwość
próbkowani
a
CPS
1-9
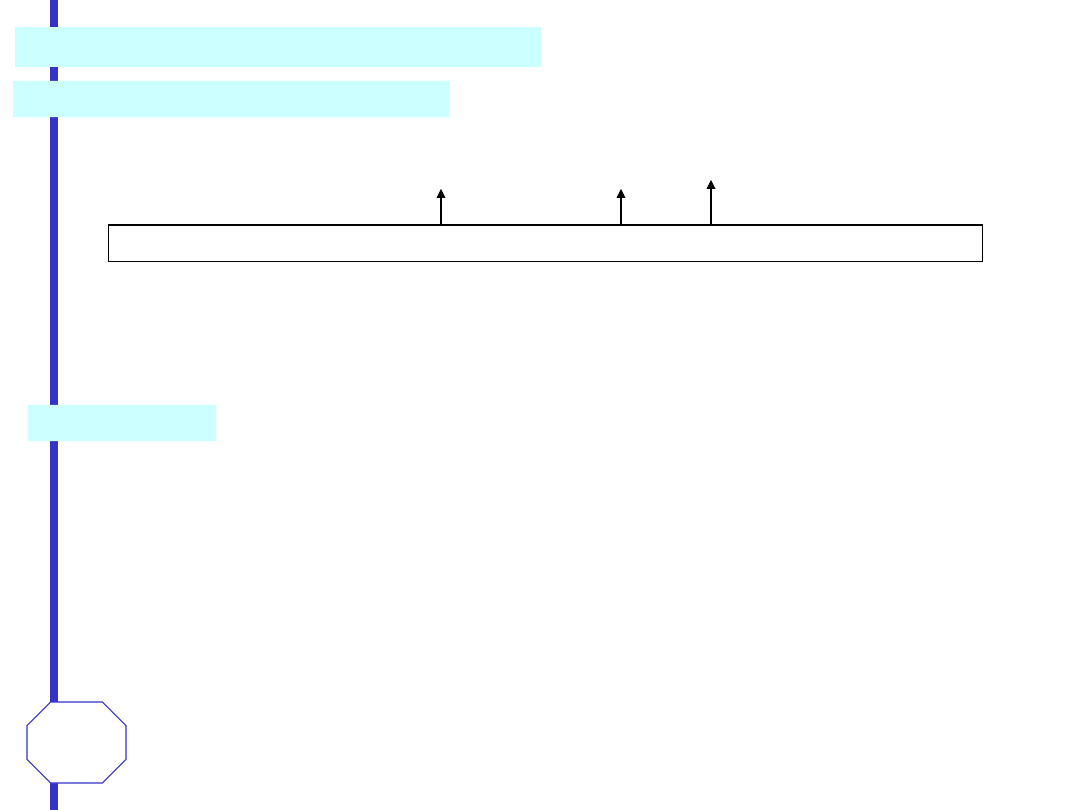
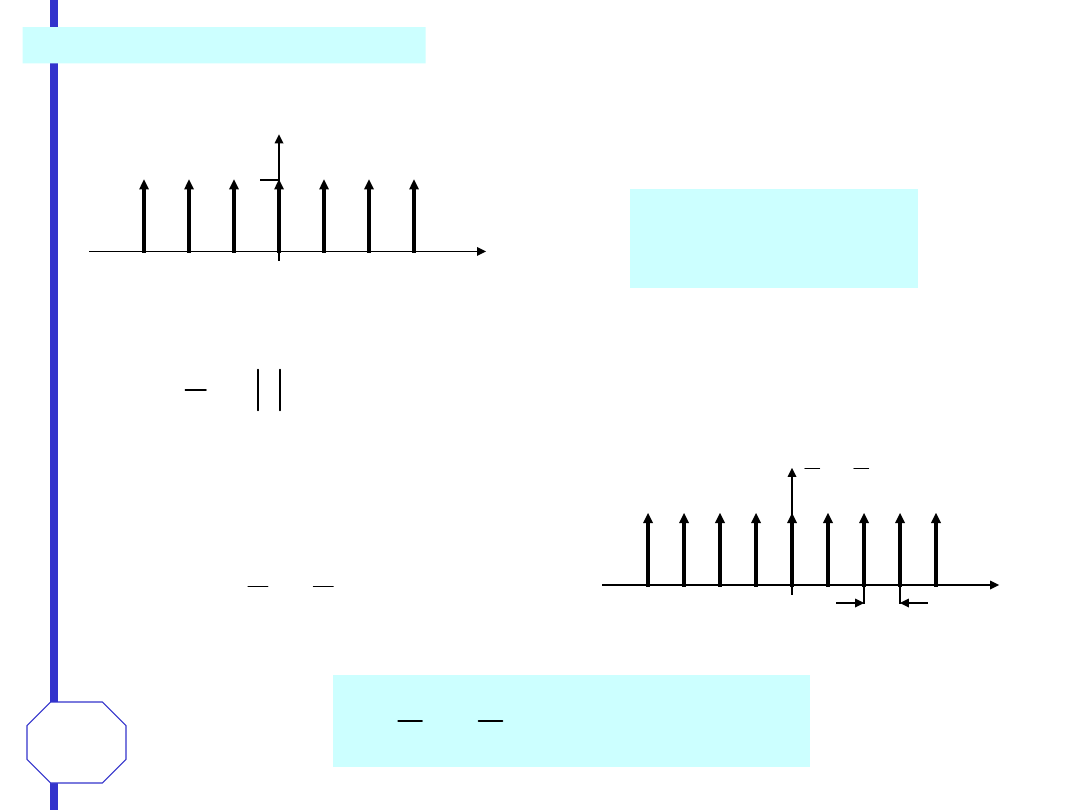
Dystrybucja grzebieniowa - III(t)
Dystrybucja grzebieniowa jest ciągiem okresowo
powtarzających się delt Diraca o jednostkowych
wysokościach
i
jednostkowym
okresie.
Zdefiniowana jest następującym wyrażeniem:
n
n
t
t
III
)
(
)
(
n
n
t
n
x
t
III
t
x
)
(
)
(
)
(
)
(
właściwość próbkowania
n
n
t
t
III
)
(
)
(
właściwość zmiany skali
t
T
)
(
T
t
III
T
1
t
0
1
2
-1
-2
-3
3
)
(t
III
1
Z właściwości zmiany skali wynika, że ciąg delt
Diraca jednakowo odległych od siebie o
dowolną odległość T i o jednostkowych
wysokościach można zapisać w postaci:
)
(
T
t
III
T
1
Wówczas operację próbkowania dowolnego sygnału w odstępach czasu T można zapisać następująco:
n
nT
t
nT
x
T
t
III
T
t
x
)
(
)
(
)
(
)
(
1

CPS
1-10
W teorii sygnałów pojęciu
sygnał
przyporządkowuje się odpowiednie modele
matematyczne. Wybór tych modeli jest w zasadzie arbitralny ale ze względów
praktycznych bierze się pod uwagę następujące aspekty:
•
Model powinien być możliwie ogólny, tak aby opisywał dostatecznie szeroką klasę
sygnałów fizycznych i abstrahował od jego natury fizycznej.
•
Model powinien zapewniać łatwość analizy matematycznej problemów generacji,
przetwarzania i przesyłania sygnałów.
Wszystkie sygnały fizyczne (istniejące w przyrodzie oraz generowane sztucznie przez
człowieka) trwają w czasie, mają na ogół bardzo skomplikowaną formę i nie dają się opisać
żadną funkcją elementarną. Bezpośrednie badanie analityczne takich sygnałów jest
niezwykle trudne, a czasami niemożliwe. Dobór odpowiedniej
analitycznej
reprezentacji sygnału
jest zagadnieniem kluczowym w analizie sygnałów.
Przedstawienie sygnału w postaci analitycznej powinno zapewnić uproszczenie obliczeń
przy badaniu właściwości sygnału i pomiarach jego parametrów oraz umożliwić głębszą
interpretację niektórych cech fizycznych.
Sygnały mogą być reprezentowane w
dziedzinie czasu
i w
dziedzinie częstotliwości
.
W zależności od celu analizy wybiera się jedną z tych dziedzin wykorzystując odpowiedni
aparat matematyczny.
METODY ANALIZY SYGNAŁÓW
Najczęściej stosowana jest
widmowa (dyskretna) reprezentacja sygnałów
(dziedzina częstotliwości). W przypadku sygnałów okresowych jest to
trygonometryczny lub zespolony
szereg Fouriera
,
a w przypadku sygnałów nieokresowych
całkowe przekształcenie (transformata) Fouriera.
W
dziedzinie czasu
sygnały opisuje się
średnią czasową rzędu
n
lub
funkcją korelacji
.
CPS
11
CPS
1-11
SZEREG FOURIERA - trygonometryczny
Z matematycznego punktu widzenia
zagadnienie dyskretnej reprezentacji
sygnału sprowadza się do aproksymacji
sygnału
x
szeregiem typu
n
i
i
i
x
1
x
i
-
ustalone funkcje
i
liczby rzeczywiste lub zespolone
Po ustaleniu funkcji aproksymującej wyznacza się liczby
i
tak, aby błąd aproksymacji
(według
ustalonego
kryterium)
był
najmniejszy.
Kryterium
tym
jest
błąd
średniokwadratowy. Można udowodnić, że błąd aproksymacji dąży do zera jeśli zastosuje
się zestaw zupełny funkcji ortogonalnych, a liczba wyrazów szeregu dąży do
nieskończoności. Jeśli do aproksymacji użyje się zestaw funkcji sinus i cosinus (najczęściej
stosowany), to dowolną funkcję okresową o okresie T
0
spełniającą warunki Dirichleta,
można przedstawić za pomocą nieskończonego szeregu, zwanego szeregiem Fouriera, o
równaniu
1
0
0
0
2
1
n
n
n
t
n
b
t
n
a
a
t
x
sin
cos
)
(
dt
t
n
t
x
T
a
T
n
0
0
0
2
cos
)
(
dt
t
n
t
x
T
b
T
n
0
0
0
2
sin
)
(
0
0
2
T
trygonometryczny
szereg Fouriera
2
2
n
n
n
b
a
X
n
n
n
a
b
arctg
widmo
amplitudowe
sygnału
widmo fazowe
sygnału
dt
t
t
x
T
a
T
0
0
0
1
)
(
ponieważ
)
cos(
sin
cos
X
b
a
1
0
0
2
1
n
n
n
t
n
X
a
t
x
)
cos(
)
(
gdzie:
SYGNAŁY W DZIEDZINIE CZĘSTOTLIWOŚCI
CPS
12
CPS
1-12
SZEREG FOURIERA - wykładniczy
n
t
jn
n
e
F
t
x
0
)
(
Uwzględniając zależności Eulera
sin
cos
j
e
j
sin
cos
j
e
j
otrzymuje się
można wykazać, że
)
(
)
(
n
n
n
n
n
n
jb
a
F
jb
a
F
a
F
2
1
2
1
0
0
0
0
0
0
1
T
t
jn
n
dt
e
t
f
T
F
)
(
zespolony szereg
Fouriera
zespolone widmo
Fouriera
oraz
n
n
n
n
n
n
n
n
n
n
F
b
a
A
F
F
j
b
F
F
a
2
2
2
)
(
)
(
Przedstawienie funkcji okresowej za pomocą szeregu Fouriera jest równoważne
rozłożeniu funkcji okresowej na jej funkcje składowe. Częstotliwość f
0
= w
0
/2p
jest podstawową częstotliwością, a pozostałe harmonicznymi częstotliwości f
0
..
Dlatego analiza sygnału przy użyciu szeregu Fouriera nazywa się
analizą
harmoniczną
.
CPS
13
CPS
1-13
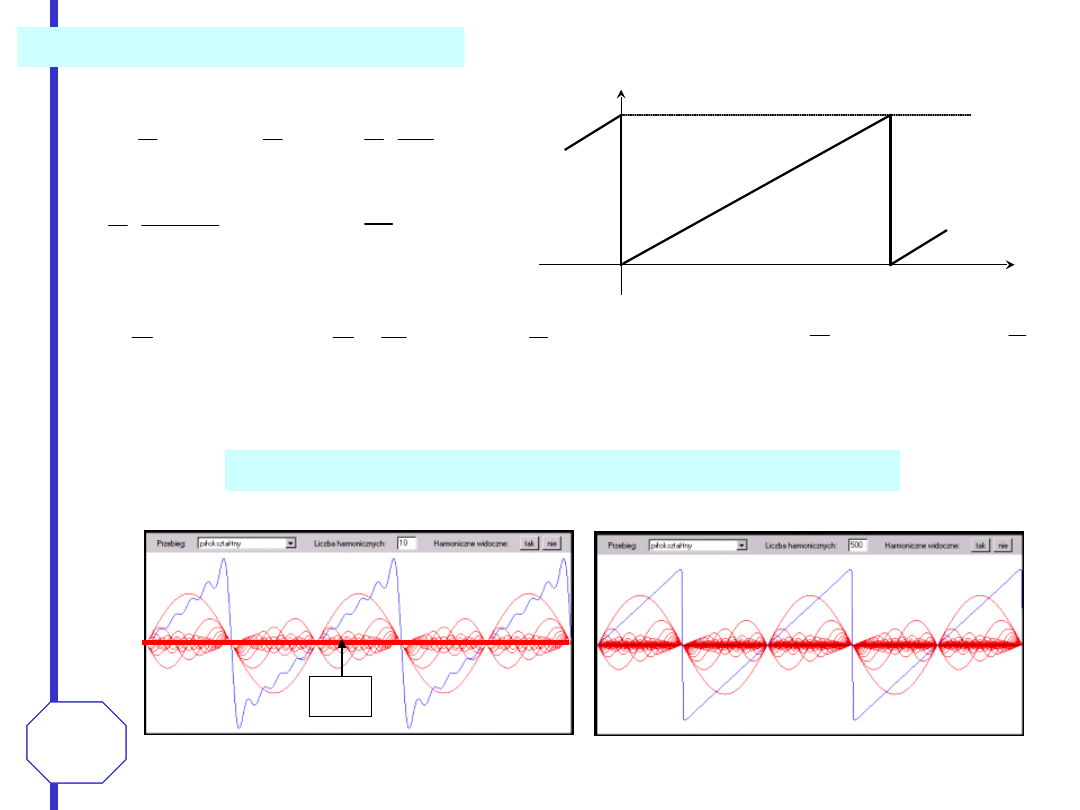
SZEREG FOURIERA -
Przykłady
Stąd szereg Fouriera reprezentujący sygnał
x(t)=
3
t
(0<t<2
) ma postać:
Rozwinąć w szereg Fouriera sygnał: x(t)=3t
(0<t<2
6
0
2
2
3
1
2
3
1
3
1
2
2
2
0
2
2
0
0
0
)
(
)
(
t
tdt
dt
t
x
T
a
T
3
2
0
a
0
3
1
3
1
3
1
2
0
2
0
2
0
ktdt
k
kt
k
t
dx
kt
t
a
k
sin
sin
)
cos(
k
dt
kt
t
b
k
6
3
1
2
0
)
sin(
....
sin
.
sin
.
sin
sin
sin
t
t
t
t
t
y
5
2
1
4
5
1
3
2
2
3
6
3
k = 10
k = 500
źródło: http://skierka.zsh.konin.pl/andrzej/szeregf.html
a
0
/2
x(t)
t
y=3t
2
CPS
14
CPS
1-14
SZEREG FOURIERA -
Przykłady
widmo amplitudowe
k
k
b
a
n
X
n
n
6
6
0
2
2
2
2
)
(
0
6
*
tg
tg
k
arc
a
b
arc
n
n
n
widmo fazowe
t
x(t)
T
A
t
A
t
x )
(
Rozwinąć w wykładniczy szereg Fouriera sygnał okresowy:
T
n
Sa
T
A
n
Sa
T
A
n
n
A
n
T
n
A
j
e
e
T
n
A
e
e
T
jn
A
e
T
jn
A
dt
Ae
T
F
jn
jn
jn
jn
T
t
jn
t
jn
n
2
2
2
2
2
2
2
2
2
2
1
0
0
0
0
0
2
2
0
2
2
2
2
0
2
2
0
0
0
0
0
0
0
)
(
)
sin(
)
sin(
/
/
/
/
CPS
15
CPS
1-15
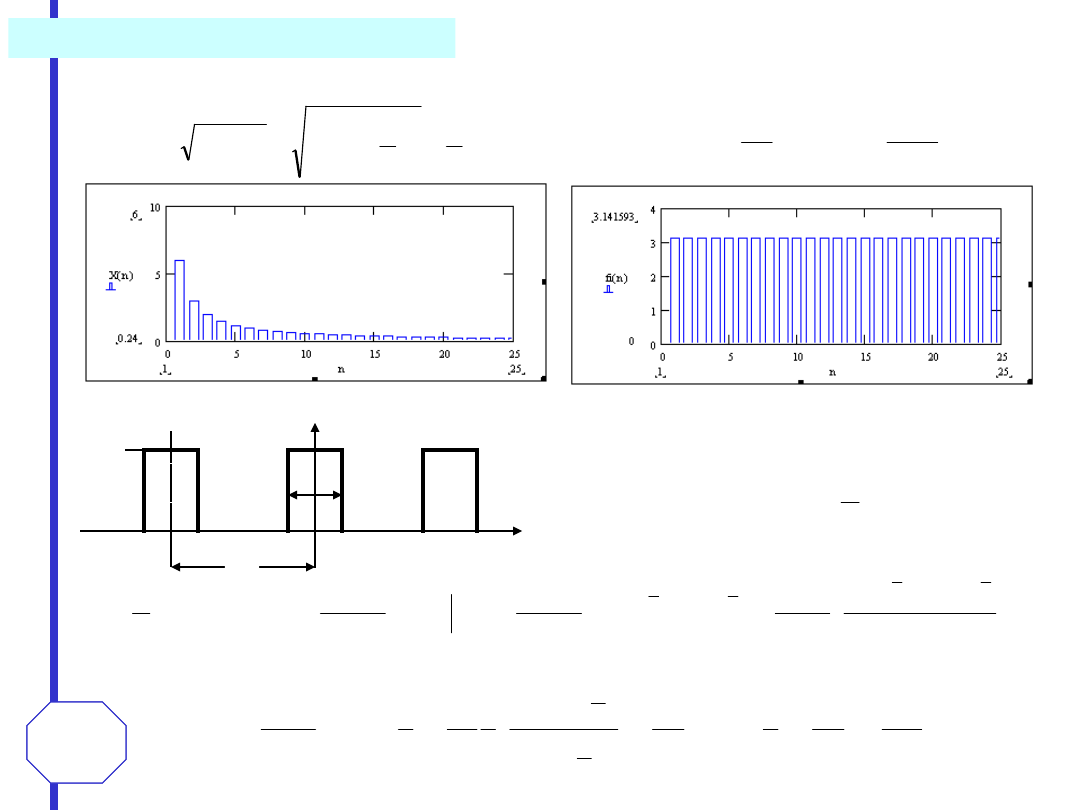
SZEREG FOURIERA -
Przykłady
n
t
jn
n
t
jn
n
e
T
n
Sa
T
A
e
F
t
x
0
0
)
(
źródło: http://skierka.zsh.konin.pl/andrzej/szeregf.html
n = 3
n = 33
Efekt Gibbsa
F
0
0
0
1
1
1
7
1
7
Re
Im
1
X
2
1
1
X
2
1
)
t
cos(
X
1
1
1
t
1
1
widmo amplitudowe
T
n
Sa
T
A
F
n
T
A
Fazorowy model sygnału
fazor
- wektor obracający się na płaszczyźnie zespolonej
CPS
16
CPS
1-16
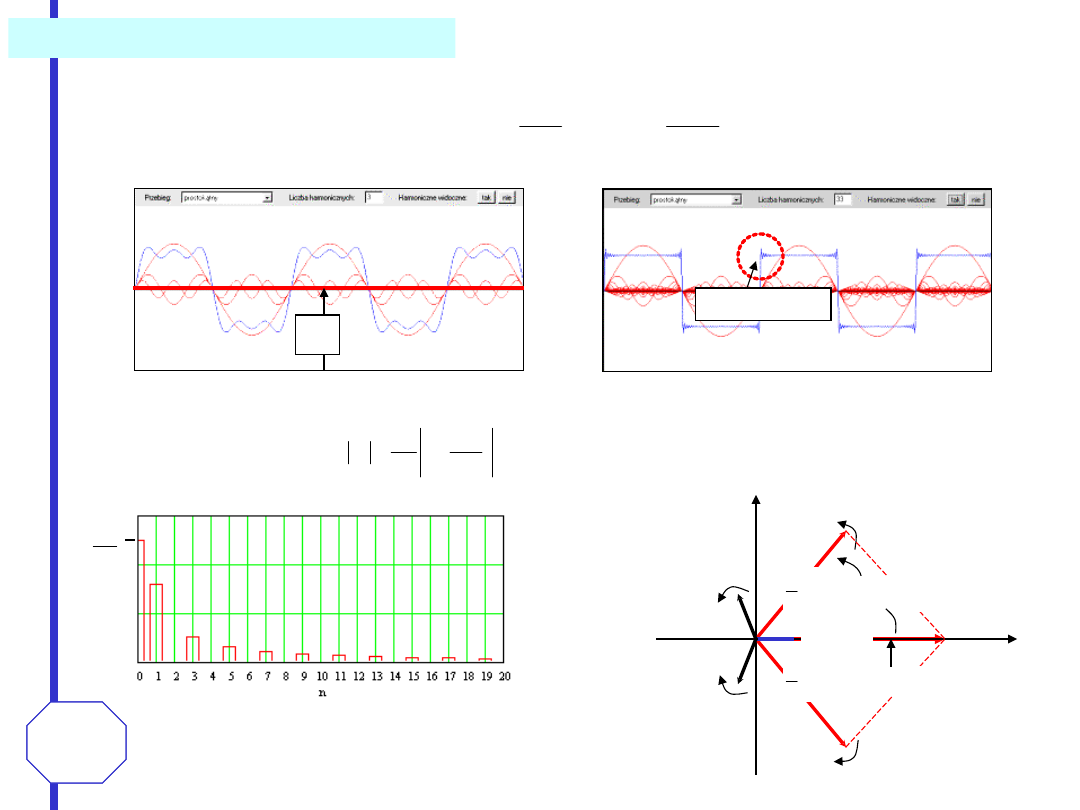
SZEREG KOTIELNIKOWA-SHANNONA
Dowolny sygnał x(t) o ograniczonym częstotliwością f
max
paśmie może być reprezentowany przez szereg
n
m
n
m
nT
t
Sa
nT
x
nT
t
f
Sa
nT
x
t
x
)
(
)
(
)
(
2
)
(
)
(
współczynniki szeregu są wartościami sygnału x(t) w punktach nT
x(nT)
wartości sygnału w
dyskretnych chwilach
czasu
m
f
T
2
1
kolejne wyrazy szeregu
suma wyrazów szeregu
T

CPS
17
CPS
1-17
TRANSFORMACJA FOURIERA
Dyskretne widmo Fouriera istnieje dla sygnałów okresowych. Natomiast w praktycznych
zastosowaniach istnieje konieczność analizy sygnałów nieokresowych. Jeśli sygnał
nieokresowy potraktuje się jako sygnał periodyczny o okresie dążącym do nieskończoności,
to dyskretne widmo Fouriera takiego sygnału przechodzi w granicy w widmo ciągłe.
0
0
2
1
2
n
d
T
d
T
T
)
(
)
(
)
(
)
(
)
(
)
(
j
X
F
d
e
j
X
t
x
t
x
F
dt
e
t
x
j
X
t
j
t
j
1
2
1
Para transformat Fouriera
transformata prosta
zespolone widmo
sygnału
transformata odwrotna
)
(
Im
)
(
Re
)
(
j
X
j
j
X
j
X
2
2
j
j
j
X
Im(
)
Re(
)
(
)
Re(
)
Im(
tg
j
j
arc
widmo amplitudowe
sygnału
widmo fazowe
sygnału
CPS
18
CPS
1-18
Sygnał zespolony jest abstrakcyjnym, nierealizowalnym fizycznie modelem sygnału.
Charakterystyki sygnału zespolonego określone są dla całej osi zmiennej
. Natomiast
interpretację fizyczna mają tylko ich prawe części dla
0
Widmo amplitudowe i widmo fazowe reprezentują strukturę częstotliwościową sygnału.
Reprezentacja ta ma dla sygnałów rzeczywistych wyraźny
sens fizyczny
. Dla
widmo
sygnału jest wielkością fizyczną w nie mniejszym stopniu niż sam sygnał. Można je
zmierzyć lub obejrzeć na ekranie analizatora widma. Na podstawie widma można w sposób
jednoznaczny odtworzyć sygnał. Widmo sygnału jest więc alternatywnym i równoważnym
sposobem przedstawienia sygnału. Pełna informacja o sygnale jest „zapisana” w jego
widmie. Wszelkie cechy sygnału w dziedzinie czasu mają swoje odzwierciedlenie w
dziedzinie częstotliwości. Operacje przeprowadzane na widmie sygnału oddziaływają na
przebieg i parametry sygnału w dziedzinie czasu.
Część mocy sygnału
P, która przypada na przyrost pulsacji nazywana jest widmową
gęstością mocy
SENS FIZYCZNY WIDMA SYGNAŁU
d
dP
P
lim
)
(
Widmo gęstości mocy jest rzeczywistą funkcją pulsacji
. Nie zawiera ono jednak żadnej
informacji o fazie sygnału. Informacja ta jest tracona przy obliczaniu wartości średniej, co
jest niezbędne dla wyznaczania mocy.
Widmo gęstości mocy jest rzeczywiste, zawsze dodatnie i parzyste.
Ponieważ przy obliczaniu gęstości widmowej mocy informacja o fazie jest tracona,
funkcja ta nie zawiera pełnej informacji o sygnale. Stąd obliczenie odwrotne nie jest
możliwe.
)
(
)
(
CPS
19
CPS
1-19
WYBRANE WŁAŚCIWOŚCI TRANSFORMACJI FOURIERA
)
(
)
(
)
(
)
(
bY
aX
t
by
t
ax
a
X
a
at
x
1
)
(
0
0
t
j
e
X
t
t
x
)
(
)
(
liniowość
zmiana skali (podobieństwo)
Jeśli a>1, to skala czasu jest rozszerzana, sygnał jest „rozciągnięty” w czasie.
Rozszerzenie skali czasu powoduje zawężenie skali częstotliwości i jednocześnie zwiększa
się a-krotnie gęstość widmowa. Fizycznie oznacza to, że zmniejsza się szybkość zmian
sygnału, a widmo skupia się wokół małych częstotliwości, jego gęstość w tym zakresie
wzrasta.
Dla 0<a<1 sygnał jest „ściśnięty” w czasie, a efekty w dziedzinie częstotliwości są
przeciwne.
przesunięcie w dziedzinie czasu
Widmo amplitudowe sygnału przesuniętego nie ulega zmianie w stosunku do
widma amplitudowego sygnału nieprzesuniętego. Natomiast widmo fazowe
powiększa się o składnik (-
0
t). Jest to całkowicie zgodne z sensem fizycznym
przesunięcia sygnału na osi czasu. Struktura częstotliwościowa amplitud
poszczególnych harmonicznych sygnału nie zmienia się. Zmieniają się natomiast
fazy poszczególnych harmonicznych względem układu odniesienia.
0
t
j
e
Przesunięcie sygnału na osi czasu o t
0
odpowiada pomnożeniu widma przez czynnik zespolony .
CPS
20
CPS
1-20
)
(
)
(
0
0
X
e
t
x
t
j
przesunięcie w dziedzinie częstotliwości (modulacja)
)
(
)
(
0
0
X
e
t
x
t
j
)
(
)
(
0
0
X
e
t
x
t
j
Jeśli widmo sygnału przesuwa się w prawo o wartość
0
>0, to sygnał należy pomnożyć
przez sygnał wykładniczy zespolony , czyli
t
j
e
0
Przesunięcie widma sygnału w lewo o wartość
0
>0 odpowiada pomnożeniu sygnału
przez sygnał zespolony , a więc
t
j
e
0
Dodając stronami powyższe pary transformat otrzymuje się
)
(
)
(
cos
)
(
0
0
0
2
1
X
X
t
t
x
Z powyższej zależności wynika, że pomnożenie sygnału harmonicznego przez
sygnał
x(t)
powoduje rozszczepienie widma na dwie części przemieszczone w
prawo i w lewo o wartość
0
. Operacja ta nazywana jest modulacją i
wykorzystywana jest w telekomunikacji do przesyłania sygnałów na dalsze
odległości. Sygnałem modulowanym jest sygnał harmoniczny (informacja zawarta
jest w jego częstotliwości), a sygnałem modulującym sygnał
x(t).
CPS
21
CPS
1-21
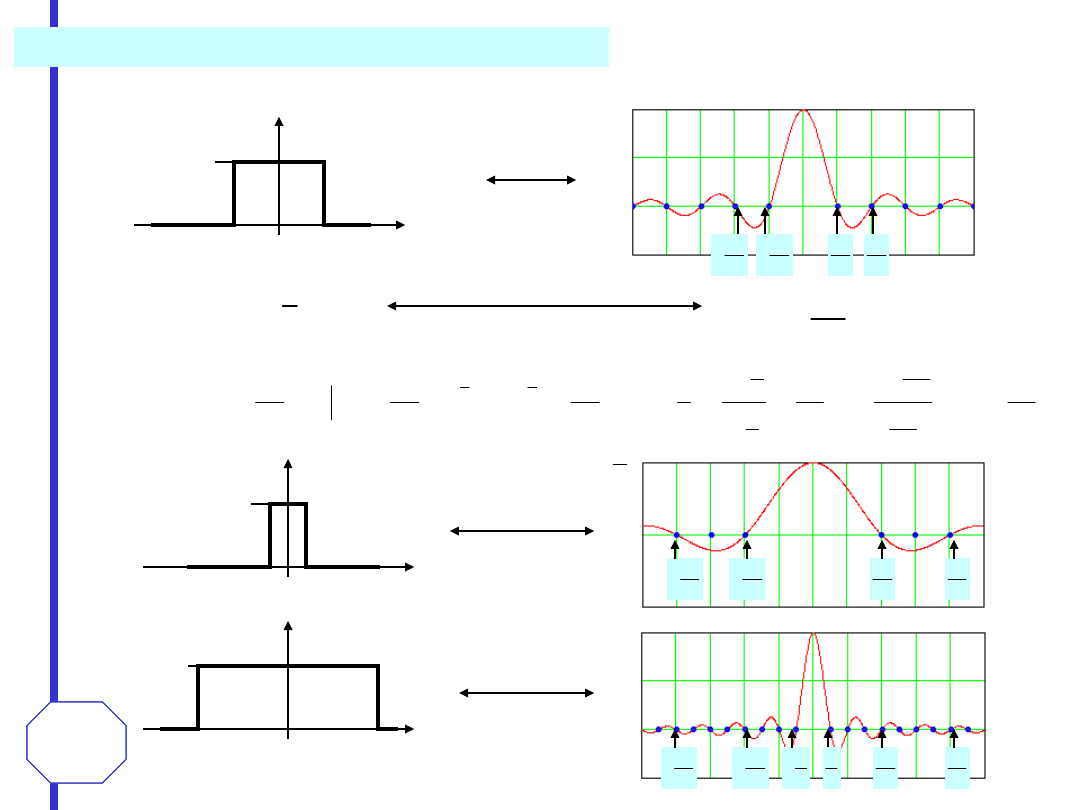
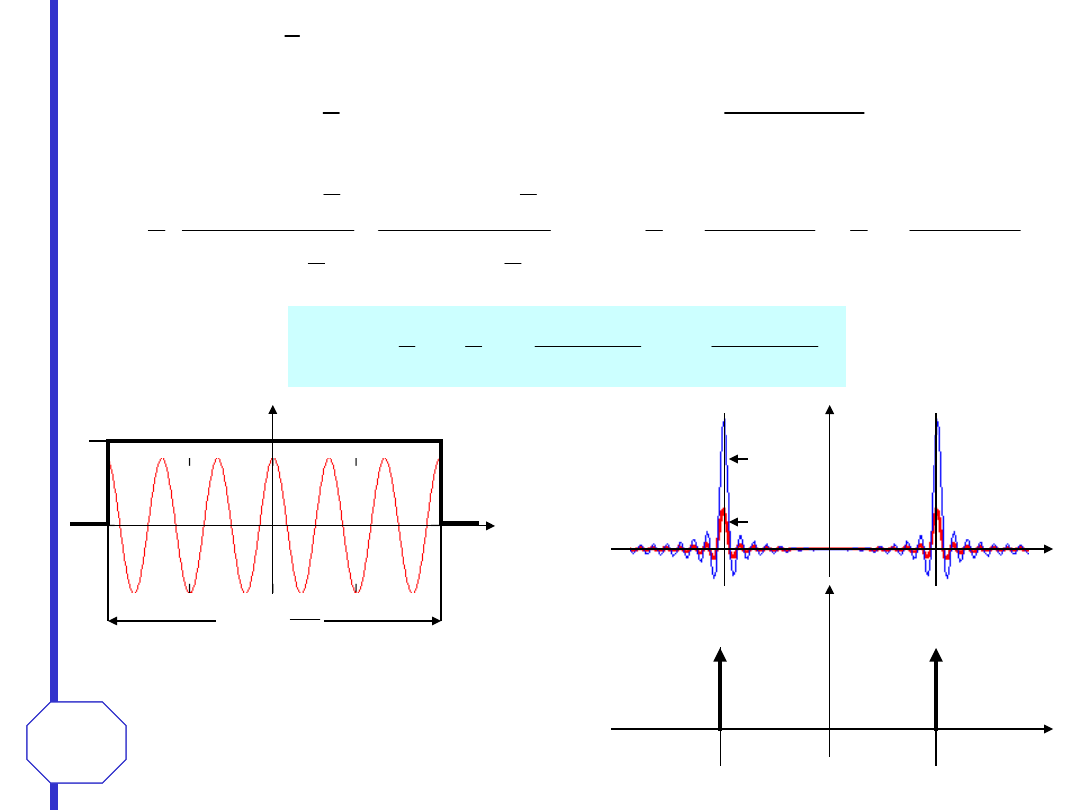
PRZYKŁADY PAR TRANSFORMAT FOURIERA
x(t)
t
-/4
/4
0
A
impuls prostokątny (funkcja bramkowa)
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
Sa
A
A
A
j
j
A
e
e
j
A
e
j
A
dt
Ae
X
j
j
t
j
t
j
sin
sin
)
sin(
)
(
/
/
/
/
t
2
Sa
A
x(t)
t
-
0
A
x(t)
t
-/2
/2
0
A
2
4
2
4
A
2
A
A
2
4
4
8
8
4
8
4
8
CPS
22
CPS
1-22
2
2
2
2
2
2
2
2
2
2
0
0
0
0
0
0
2
2
2
2
0
0
0
0
)
(
)
(
lim
)
(
)
(
sin
)
(
)
(
sin
lim
lim
cos
lim
cos
/
/
/
/
Sa
Sa
dt
e
e
e
dt
e
t
t
t
F
t
j
t
j
t
j
t
j
2
2
2
0
0
0
)
(
)
(
cos
Sa
Sa
t
t
1
0
0
12
6
T
t
x(t)
t
t
0
cos
funkcja
0
0
)
(
X
T
6
T
12
0
0
)
(
X
)
(
(t),
0
.
Zwiększanie szerokości impulsu prostokątnego
zwiększa koncentrację widma wokół pulsacji
0
.
W granicy funkcja Sa dąży do funkcji
impulsowej (t), co oznacza, że widmo funkcji
cosinus w przedziale nieograniczonym zawiera
funkcje impulsowe umieszczone w punktach
0
0
0
CPS
23
CPS
1-23
SYGNAŁY W DZIEDZINIE CZASU
wartości średnie
Sygnał x(t) może być opisana średnią czasową rzędu
n
, nazywaną też momentem
zwykłym rzędu
n
:
T
T
n
n
dt
t
x
T
t
x
)
(
)
(
2
1
lub dla sygnałów nieokresowych:
T
T
n
T
n
dt
t
x
T
t
x
)
(
lim
)
(
2
1
Dla n=1 otrzymuje się średnią arytmetyczną, która może być interpretowana jako składowa o
zerowej częstotliwości - składowa stała sygnału lub współczynnik a
0
/2 szeregu Fouriera.
Dla n=2 - moment zwykły drugiego rzędu jest miarą mocy sygnału. Pierwiastek kwadratowy
tej wielkości jest wartością skuteczną sygnału:
T
T
sk
dt
t
x
T
X
)
(
2
2
1
funkcja korelacji
T
T
T
xy
t
y
t
x
dt
t
y
t
x
T
R
)
(
)
(
)
(
)
(
)
(
lim
2
1
funkcja autokorelacji
T
T
T
xx
t
x
t
x
dt
t
x
t
x
T
R
)
(
)
(
)
(
)
(
)
(
lim
2
1
CPS
24
CPS
2-24
CPS
24
CPS
2-24
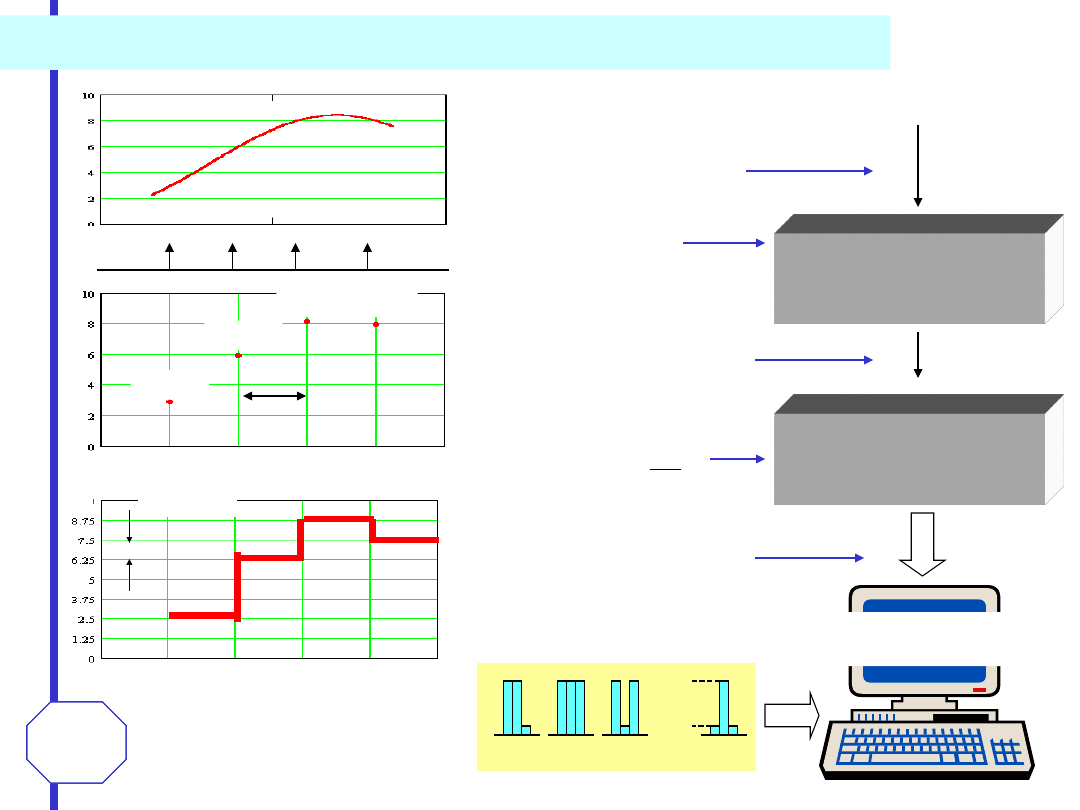
DYSKRETYZACJA SYGNAŁU ANALOGOWEGO
t
s
4t
s
3t
s
2t
s
2.901...
8.187...
5.982...
7.983...
0
1
0
1
0
1
1
1
1
0
1
1
Cyfrowe przetwarzanie
sygnału
L
H
1
x
4
x
3
x
2
x
sygnał cyfrowy w naturalnym
kodzie dwójkowym
Próbkowanie
kwantowani
e
Sygnał analogowy
x(t)
Sygnał o ciągłym
czasie i ciągłej
wartości
Sygnał o dyskretnym
czasie i ciągłej
wartości
Zakodowany
sygnał
o
dyskretnym
czasie
i
dyskretnej
wartości
Przetwornik
próbkująco-pamiętający
S/H
Przetwornik
analogowo-cyfrowy
A/C
1
0
)
(
)
(
)
(
N
n
s
nt
t
t
x
n
y
q=1.25V
7/8
6/8
5/8
4/8
3/8
2/8
1/8
0
V
10
U
FS
t
s
q
U
INT
liczba
we
kodowanie
CPS
25
CPS
2-25
CPS
25
CPS
2-25
CPS
25
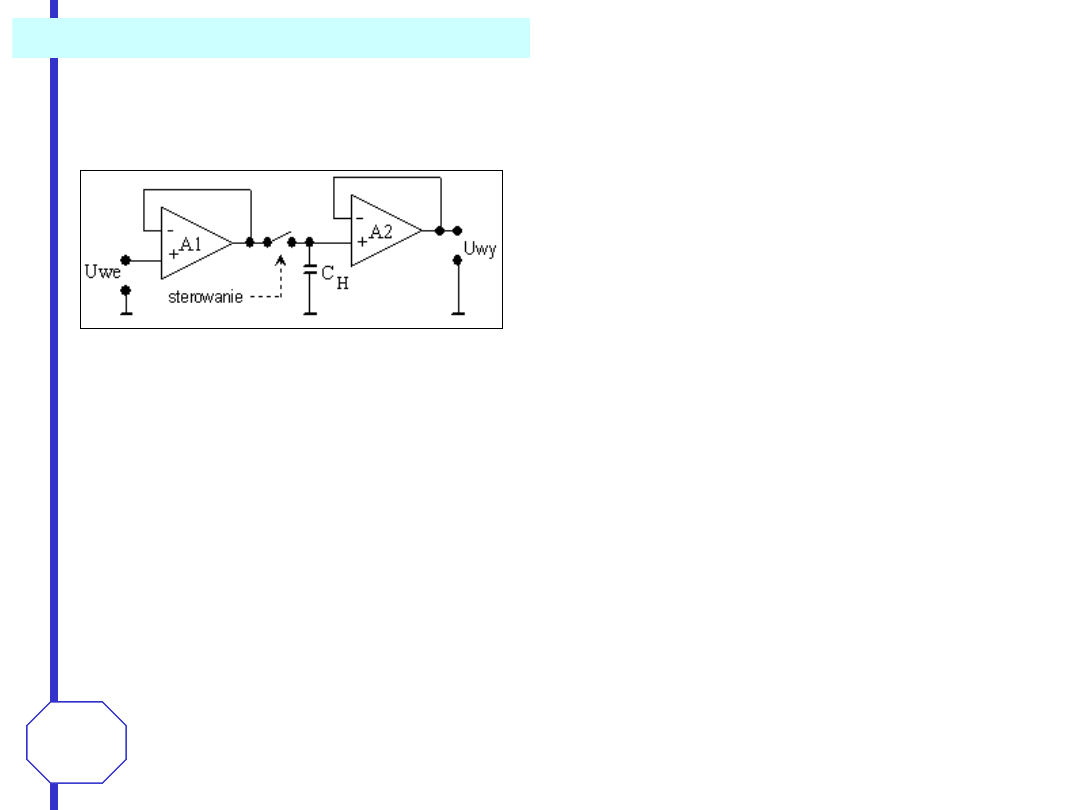
Przetwornik próbkująco-pamiętający
Przetwornik próbkująco-pamiętający (ang. sample-and-hold circuit - S/H) służy do pobrania
próbki napięcia w krótkim okresie (rzędu pojedynczych mikrosekund) i zapamiętania tej
próbki w czasie niezbędnym do przetworzenia jej przez przetwornik analogowo - cyfrowy.
Przetwornik S/H umożliwia zamianę ciągłej
funkcji U
we
(t) w ciąg impulsów U
wy
(t
n
) o
wartościach proporcjonalnych do wartości
napięcia wejściowego w chwilach t
n
.
Moment pobrania próbki określony jest
przez układ sterujący przełącznikiem.
Po zamknięciu przełącznika kondensator pamiętający C
H
ładowany jest przez rezystancję
zamkniętego przełącznika do czasu aż napięcie na kondensatorze osiągnie, z
dopuszczalnym błędem, wartość napięcia wejściowego.
Ta faza pracy układu nazywana jest
próbkowaniem
a jej czas (
czas próbkowania t
S
) jest
równy czasowi trwania impulsu sterującego. Po zakończeniu fazy próbkowania
(przełącznik otwarty) napięcie na kondensatorze, nazywane
próbką napięcia
wejściowego
, jest dostępne na wyjściu układu przez czas zwany
czasem pamiętania t
H
..
Pomiędzy fazami próbkowania i pamiętania występują stany przejściowe.
Jeśli czas próbkowania jest krótszy od czasu pamiętania, to układ nazywany jest układem
próbkująco - pamiętającym
. W przeciwnym przypadku mamy do czynienia z układem
śledząco - pamiętającym T/H
(ang. track-and-hold circuit). Sumę czasów próbkowania i
pamiętania nazywa się
okresem próbkowania
, a jego odwrotność -
częstotliwościa
próbkowania
.
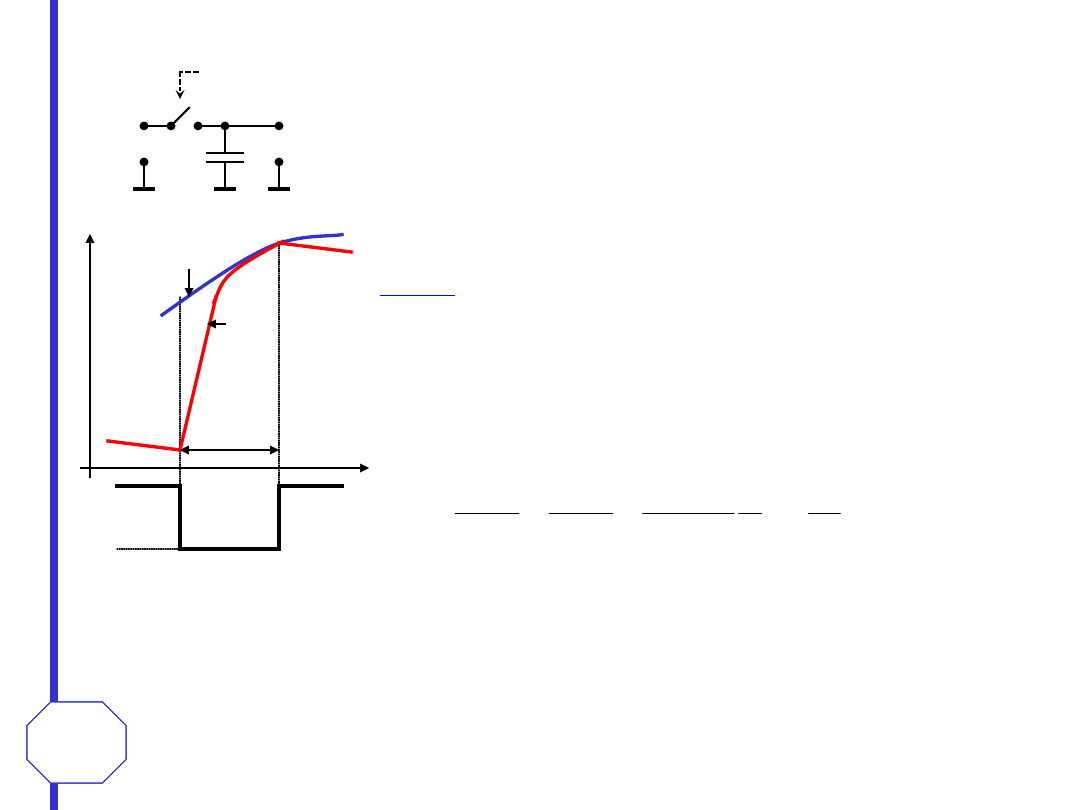
Czas, przez który musi być ładowany kondensator, aby otrzymać żądaną
dokładność próbki nazywany jest
czasem przyjęcia próbki
lub
czasem akwizycji
.
CPS
26
CPS
2-26
Trzy czynniki mają wpływ na czas przyjęcia próbki. Pierwszym
jest stała czasowa (r
zał
C
H
) wynikająca z rezystancji r
zał
przełącznika w stanie załączenia i pojemności kondensatora
pamiętającego. Drugim - maksymalny prąd wyjściowy I
0max
wzmacniacza A1. Trzecim - maksymalna szybkość zmian
napięcia S
U
na wyjściu tego wzmacniacza. Maksymalna
szybkość zmian napięcia na kondensatorze jest określona albo
przez szybkość ładowania kondensatora maksymalnym
prądem, albo przez maksymalną szybkość zmian napięcia na
wyjściu wzmacniacza, w zależności od tego, która z tych
wartości jest mniejsza.
we
U
H
C
H
C
U
sterowanie
Schemat zastępczy
Przykład
Należy obliczyć czas przyjęcia próbki o wartości 10 V z błędem = 0.02%
dla układu S/H, w którym pojemność kondensatora pamiętającego C
H
= 5
nF, maksymalny prąd wyjściowy wzmacniacza I
0max
= 10 mA i
maksymalna szybkość zmian na wyjściu wzmacniacza wejściowego S
U
=
5V/ms. Sumaryczna rezystancja wyjściowa wzmacniacza i zamkniętego
przełącznika wynosi r
zał = 120
Kondensator ładowany jest z szybkością:
s
V
s
V
C
I
dt
du
H
C
H
2
10
5
10
10
9
3
0
max
Szybkość ta nie przekracza maksymalnej szybkości zmian napięcia na wyjściu wzmacniacza,
a więc, w tym przypadku, maksymalna szybkość narastania napięcia na kondensatorze
ograniczona jest przez maksymalny prąd wyjściowy wzmacniacza. Takim prądem będzie
ładowany kondensator ze stałą szybkością 2V/s aż do momentu, kiedy suma napięć na
kondensatorze i sumarycznej rezystancji szeregowej osiągnie wartość 10V. Na
kondensatorze odłoży się w tym czasie napięcie:
t
U
H
S
czas
akwizycji
U
CH
U
we
sterowani
e
V
V
r
I
U
U
zal
we
C
H
8
8
120
10
10
10
3
0
.
max
CPS
27
CPS
2-27
Stąd pierwszy składnik czasu akwizycji wynosi
s
t
aq
4
4
2
8
8
1
.
.
)
(
Od tego momentu ładowanie kondensatora przebiega wykładniczo ze stałą czasową
ns
F
C
r
H
zal
600
10
5
120
9
Dopuszczalny bezwzględny błąd przyjęcia próbki wynosi
mV
V
U
U
we
we
2
10
100
02
0
100
.
Z takim błędem bezwzględnym musi ustalić się różnica (10 V - 8.8 V = 1.2 V). Błąd
względny dla tej wartości napięcia wynosi
0017
0
2
1
10
2
3
.
.
'
Czas niezbędny do naładowania kondensatora z takim błędem (drugi składnik czasu akwizycji) wynosi:
s
ns
t
aq
8
3
0017
0
600
2
.
)
.
ln(
)
ln(
'
)
(
Łączny czas przyjęcia próbki przez analizowany układ wynosi:
s
s
s
t
t
t
aq
aq
aq
2
8
8
3
4
4
2
1
.
.
.
)
(
)
(
W obliczeniach pominięto czas opóźnienia włączenia przełącznika, rzędu
kilkudziesięciu nano-sekund dla przełączników półprzewodnikowych.
Wynika stąd, że układ sterujący musi zamykać przełącznik na czas próbkowania nie krótszy niż t
s
= 8,2 s
koniec przykładu
CPS
28
CPS
2-28
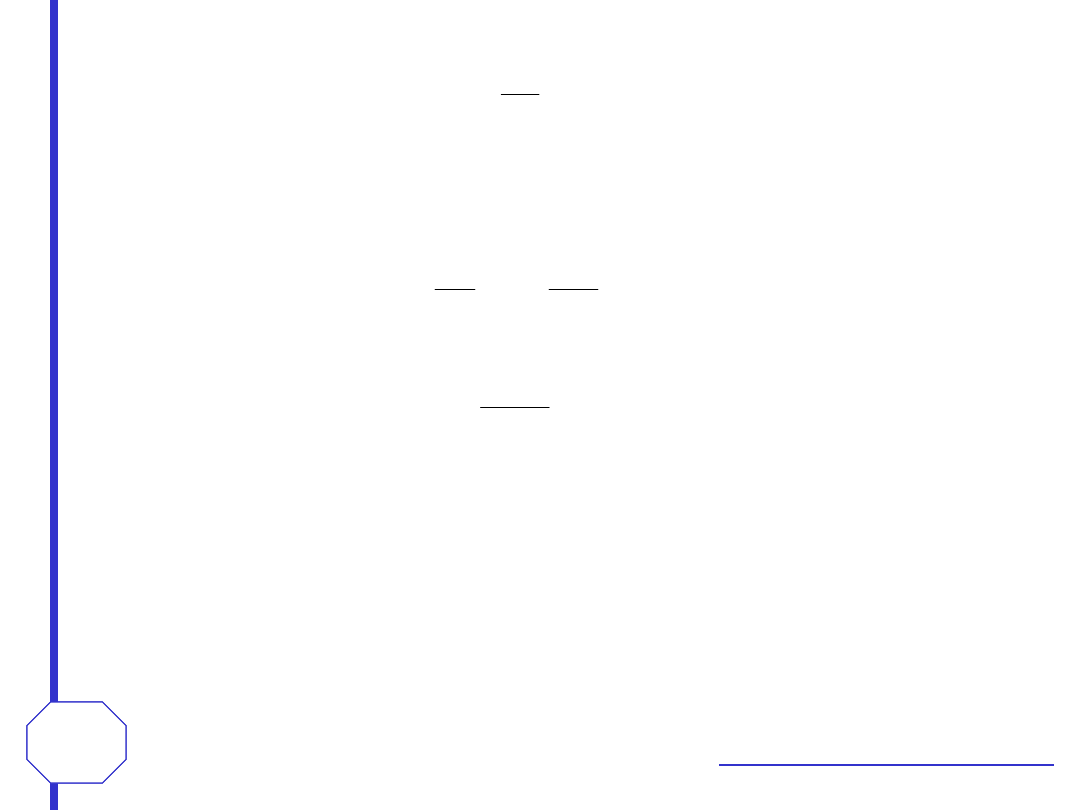
Czas przejścia od fazy próbkowania do fazy pamiętania jest różny od zera. Czas między
chwilą wystąpienia zmiany sygnału sterującego a chwilą pełnego rozwarcia przełącznika
jest określany jako
czas apertury
.
Czas ten może zmieniać się przypadkowo w pewnych
granicach zwanych
drżeniem fazy apertury
(ang. aperture
jitter).
Błąd spowodowany czasem apertury można korygować
przez właściwy dobór chwili zmiany sygnału sterującego.
Błąd wynikający z drżenia fazy apertury nie daje się
skorygować. Przejawia się on tym, że zapamiętana wartość
napięcia będzie się różnić od wartości chwilowej napięcia w
momencie zmiany sygnału sterującego. W pewnych
zastosowaniach wartość tego parametru może być
krytyczna.
Przykład
Mierzone jest napięcie sinusoidalne o wartości maksymalnej 10V i częstotliwości 3 kHz. Wymagane jest
aby błąd wynikający z drżenia fazy apertury był mniejszy od 0.01% wartości maksymalnej (U = 1 mV).
Obliczyć dopuszczalny czas drżenia fazy apertury układu S/H.
Maksymalna szybkość zmiany napięcia mierzonego (w chwili przejścia sinusoidy przez zero) wynosi
s
V
V
s
U
dt
t
U
d
S
t
188400
10
1
3000
2
0
max
max
max
sin
(
Czas, w którym napięcie zmieni się o 1 mV wynosi
ns
s
S
U
t
5
188400
10
1
3
max
Należy więc wybrać układ S/H o drżeniu fazy apertury mniejszym od 5 ns.
Wymaganie takie spełniają dobre scalone układy S/H.
koniec przykładu
czas apertury
drżenie
fazy
apertury
błąd
apertur
y
błąd drżenia
fazy apertury
t
U
H
S
CPS
29
CPS
2-29
CPS
29
CPS
2-29
CPS
29
CPS
2-29
CPS
29
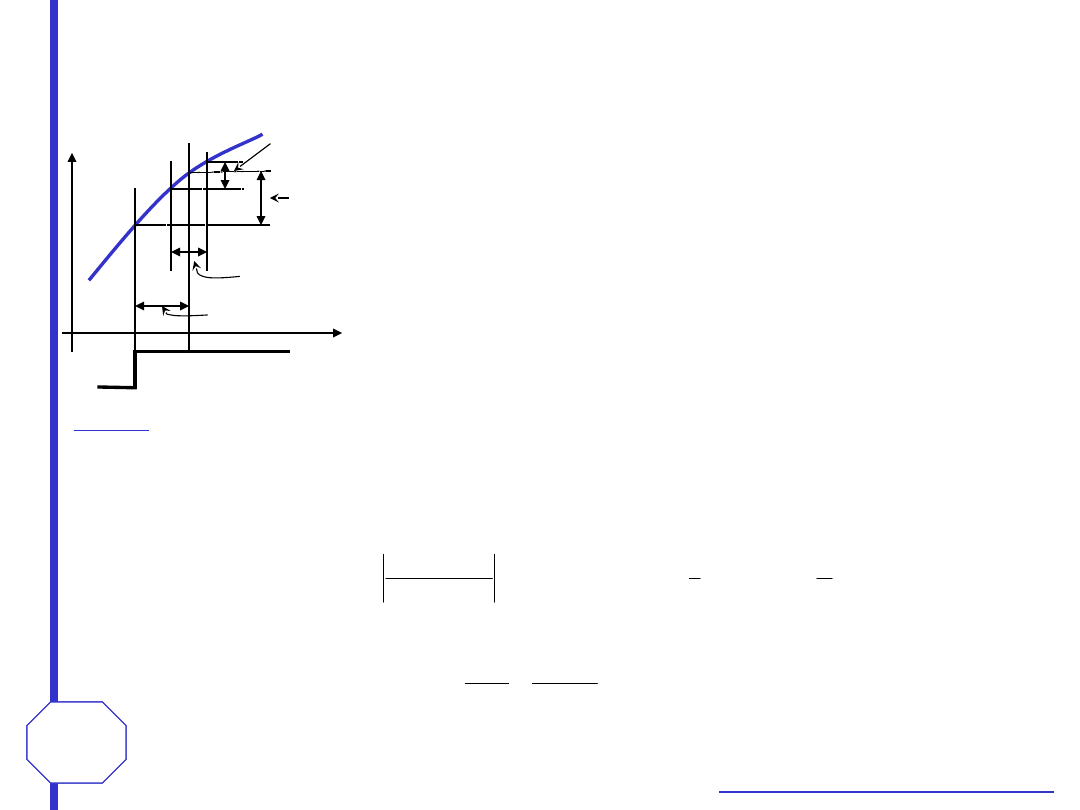
Przy rozłączaniu przełącznika może wystąpić zjawisko
polegające na zmianie ładunku zgromadzonego w
kondensatorze pamiętającym w wyniku oddziaływania
cyfrowego
układu
sterującego
na
kondensator
pamiętający. W chwili wyłączania przełącznika może
wystąpić przepływ ładunku między kondensatorem C
H
a
pasożytniczym kondensatorem C
p
między bramką a
drenem tranzystora.
S
H
Wartość tego ładunku jest równa: , gdzie DU
B
- zmiana napięcia bramki w
momencie wyłączania przełącznika. Na skutek odpływu ładunku q następuje zmiana
napięcia na kondensatorze pamiętającym
B
p
U
C
q
H
B
p
H
C
C
U
C
C
q
U
H
Zmiana ta nazywana jest
piedestałem
lub
błędem piedestału.
Przy przejściu od fazy próbkowania do fazy pamiętania występują krótkotrwałe oscylacje
tłumione napięcia pamiętanego. Czas trwania tych oscylacji, w zależności od rodzaju
układu S/H i wymaganej dokładności, wynosi od kilku nanosekund do kilku mikrosekund.
W katalogach zwykle podawana jest wartość tego czasu (
settling time
) dla różnych
rozdzielczości przetwornika a/c mierzącego zapamiętaną próbkę. Projektując sterowanie
układu należy przewidzieć opóźnienie impulsu inicjującego konwersję przetwornika a/c w
stosunku do zbocza inicjującego fazę pamiętania. Zapobiega to zakłóceniom pracy
przetwornika.
W fazie pamiętania najważniejszym parametrem jest
szybkość spadku napięcia na
kondensatorze pamiętającym
określona jako
Prąd upływowy
jest sumą algebraiczną czterech różnych składników mających
wpływ na jego wartość i polaryzację. W katalogach podawana jest wartość prądu
upływowego. Na tej podstawie można obliczyć szybkość zmian napięcia
pamiętanego.
H
L
C
C
I
dt
dU
H
gdzie I
L
- całkowity prąd upływowy.
CPS
30
CPS
2-30
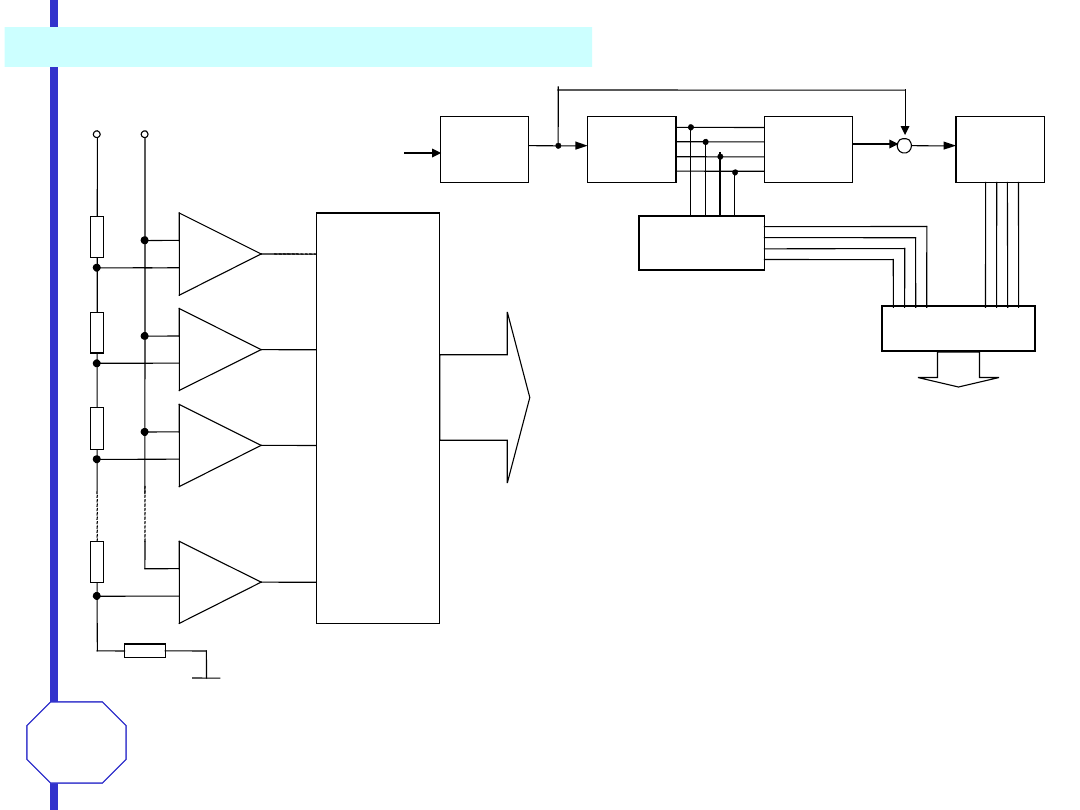
WYBRANE PRZETWORNIKI ANALOGOWO-CYFROWE
N
k
K
R
K
wy
U
b
U
1
2
2R
R
2R
R
2R
2R
R
I
2
1
R
I
4
1
R
I
8
1
R
/
U
I
R
R
U
R
U
I
1
0
1
1
0
0
U
wy
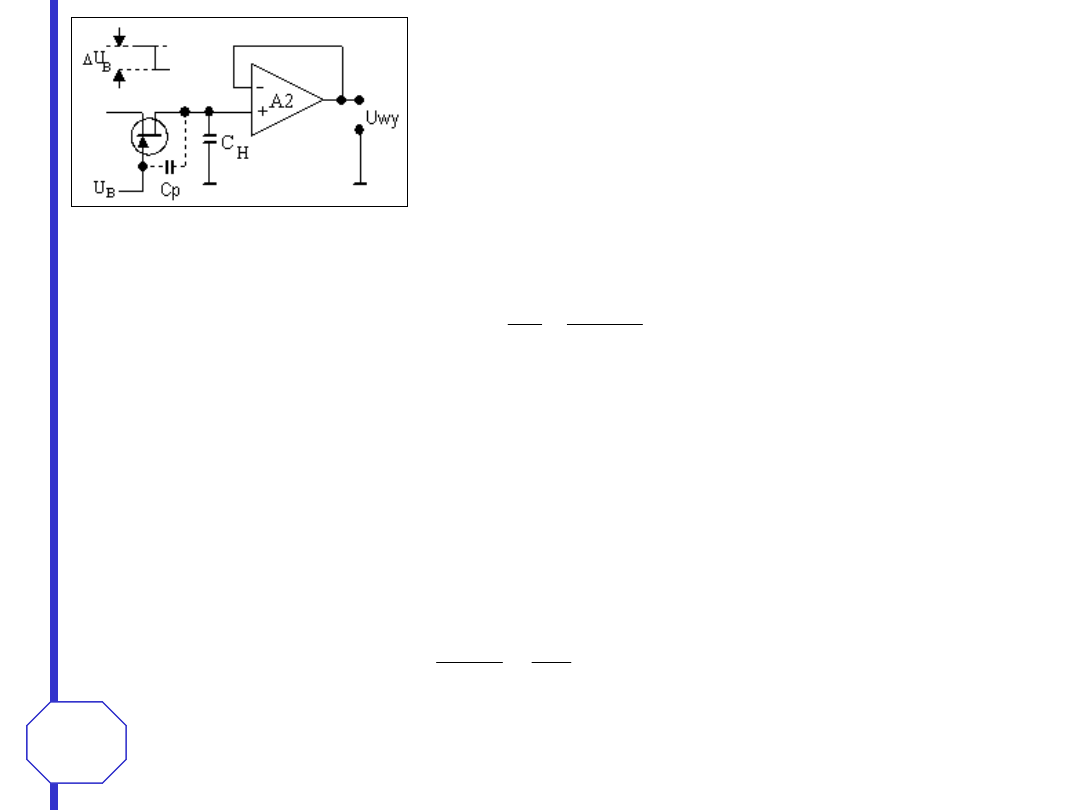
Przetwornik cyfrowo-analogowy (C/A)
przetwornik kompensacyjny
REJESTR SUKCESYWNEJ
APROKSYMACJI (SAR)
PRZETWORNIK
C/A
MSB
LSB
KOMPARATOR
ZEGAR
X
U
K
U
U
R
=U
FS
1
0
1
10,24 V
Kompensacyjny przetwornik A/C
1
0
1
q=1,28
U
x
czas
przetwarzan
ia
nominalny zakres U
FS
=q2
N
rzeczywisty zakres U
0
=q(2
N
-1)
Po ostatnim kroku napięcie kompensacyjne ma wartość równą z
dokładnością 1 LSB napięciu mierzonemu. Cyfrową reprezentacją
wartości napięcia mierzonego w kodzie binarnym jest stan
przerzutników.
Układ sterujący powoduje generowanie przez przetwornik C/A kolejno
napięć kompensacyjnych o wartościach U
R
/2, U
R
/4, ..., U
R
/2
N
, gdzie N jest
liczbą bitów przetwornika. W każdym kroku przetwarzania wartość
napięcia kompensacyjne-go jest porównywana z napięciem mierzonym.
Jeśli wartość tego napięcia po kolejnym k-tym kroku jest mniejsza od
napięcia mierzonego, to przerzutnik b
k
odpowiadający temu krokowi
pozostaje w stanie “1” i odpowiadająca mu część napięcia U
k
= U
R
/2
k
pozostaje włączona. Jeśli po kolejnym kroku napięcie kompensujące jest
większe od mierzonego (lub równe), to następuje skasowanie przerzutnika
(b
k
= 0) i odłączenie odpowiadającej temu krokowi składowej napięcia
kompensującego.
CPS
31
CPS
2-31
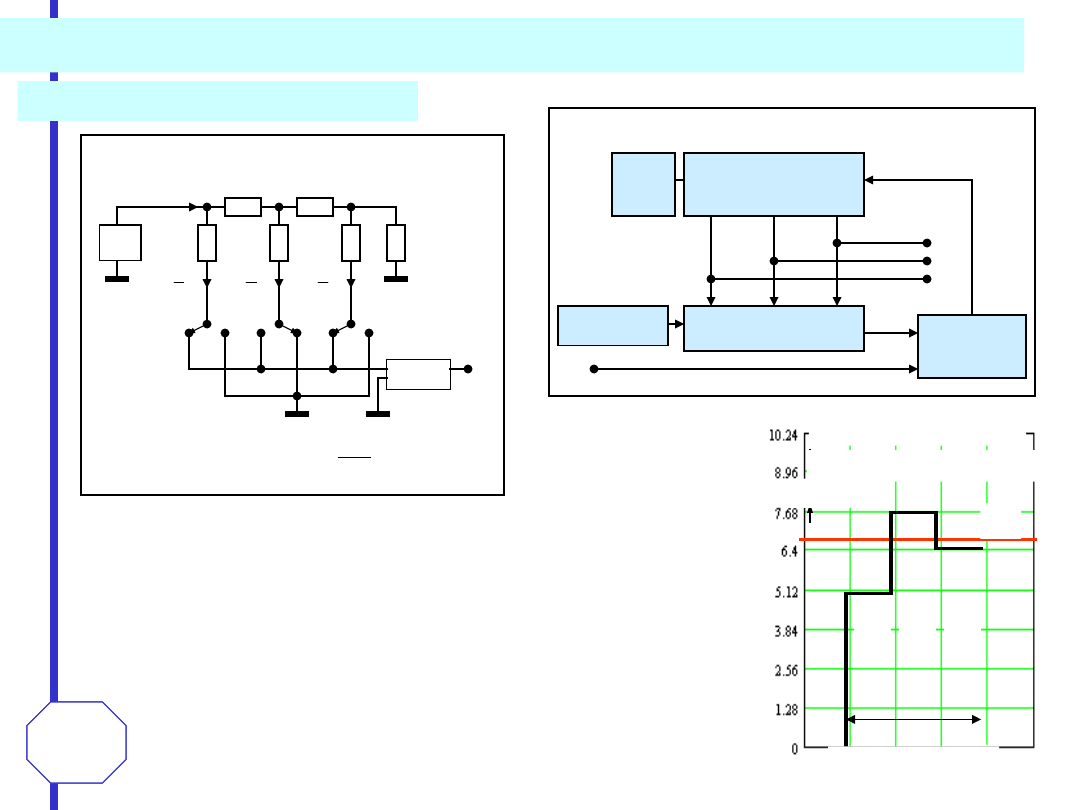
przetwornik natychmiastowy typu „flash”
W
ośmiobitowym
dwustopniowym
przetworniku typu „flash” po wykonaniu
kwantyzacji zgrubnej uzyskane 4-bitowe
słowo cyfrowe (bardziej znaczące bity)
jest przetwarzane na wartość analogową
w 4-bitowym przetworniku c/a. Ta wartość
jest
odejmowana
od
sygnału
wejściowego, a różnicę poddaje się
przetworzeniu a/c w drugim 4-bitowym
przetworniku „flash” dającym 4 mniej
znaczące bity wyniku przetwarzania.
-
+
-
+
-
+
-
+
R
R
R
R
R
U
WE
U
REF
r
Konwerte
r
kodów
Wyjście
cyfrowe
jednostopniowy
komparatory
Układ
S/H
„flash
”
4 bity
zgrubny
C/A
4 bity
Układ
zatrzaskowy
-
+
„flash
”
4 bity
dokładn
y
U
WE
rejestr
dwustopniowy
CPS
32
CPS
2-32
parametry przetworników analogowo-cyfrowych
Najważniejszymi parametrami przetworników analogowo-cyfrowych są te, które określają dokładność i
szybkość przetwarzania. Przetwornik analogowo-cyfrowy ma cechy układu cyfrowego jak i układu
analogowego. Z jego właściwościami jako układu cyfrowego związany jest błąd kwantyzacji określający
rozdzielczość przetwarzania, a z właściwościami analogowymi - błędy analogowe określające dokładność
względna i bezwzględną.
błąd analogowy
Błąd analogowy przetwornika a/c, tak jak każdego układu analogowego składa się z błędu zera, błędu
czułości (wzmocnienia) i błędu nieliniowości. Dwie pierwsze składowe błędu analogowego definiowane są
identycznie jak dla innych analogowych układów pomiarowych i wyrażane w wartościach względnych w
stosunku do nominalnego zakresu przetwarzania. Istotny dla użytkownika jest dodatkowy błąd
temperaturowy tych składowych. Dla temperatury odniesienia są zwykle skorygowane do pomijalnie
małej wartości.
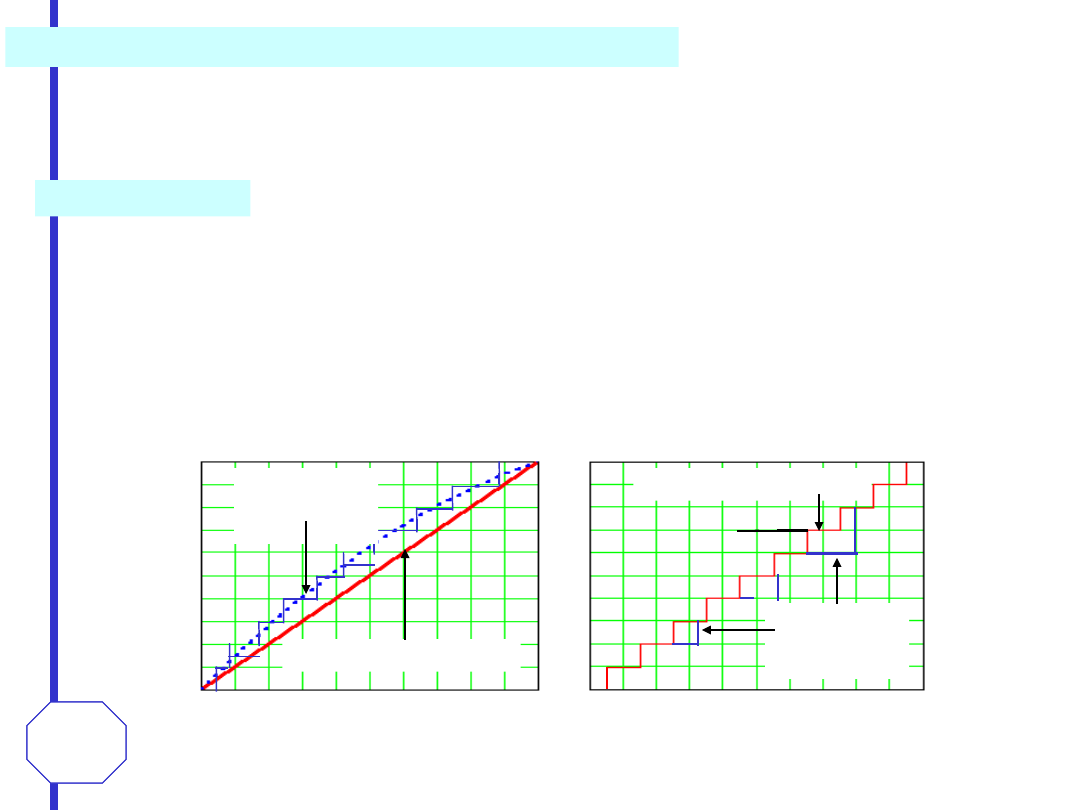
Błąd nieliniowości (tz.
nieliniowość całkowa
) określony jest jako maksymalne odchylenie rzeczywistej
charakterystyki przetwarzania (linia łącząca środki przedziałów zmian napięcia, przy których następuje
zmiana kodu) od charakterystyki idealnej. Zmiana wartości kodu w idealnym przetworniku następuje przy
zmianie napięcia o 1 LSB (1 kwant). W rzeczywistym przetworniku istnieją lokalne różnice w stosunku do 1
LSB (tzw.
nieliniowość różnicowa
). Jeśli błąd ten jest większy od 1 LSB, to pojawia się efekt gubienia kodu.
Wypadkową tych trzech składowych błędu jest
błąd podstawowy
określony jako maksymalna
różnica pomiędzy rzeczywistą charakterystyką przetwarzania a
charakterystyką idealną
(nominalną).
charakterystyka idealna
charakteryst
yka
rzeczywista
brakujący kod
charakteryst
yka
rzeczywista
charakterystyka idealna
nieliniowość całkowa
nieliniowość różniczkowa
CPS
33
CPS
2-33
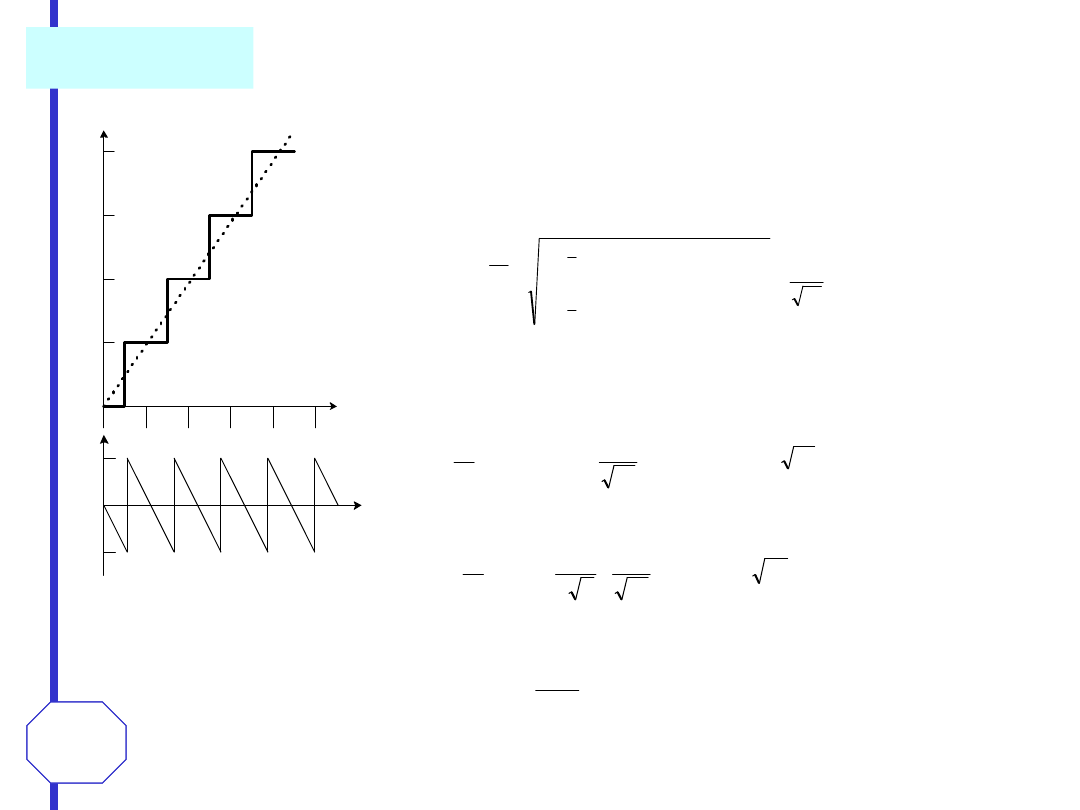
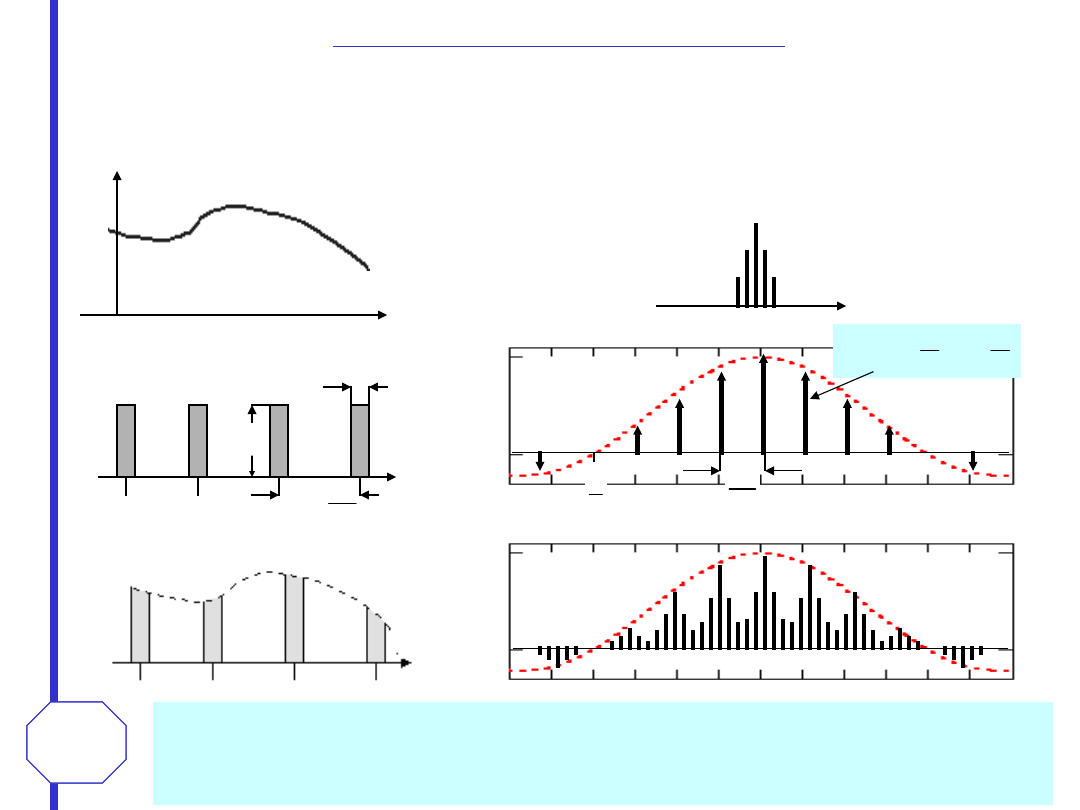
Błąd cyfrowy -
błąd kwantyzacji
q
q
q
q
q
000
001
010
011
100
U
x
+½ q
-½ q
U
x
Zastąpienie rzeczywistych wartości U
x
odpowiednimi wartościami
dyskretnymi wprowadza
błąd kwantowania
zwany też ze względu na
przypadkowy charakter
szumem kwantowania
. Średnia wartość błędu
kwantyzacji w pełnym zakresie przetwarzania jest równa zeru, jeśli
charakterystyka przetwarzania jest przesunięta o wartość q/2 w stosunku
do początku układu współrzędnych.
Sygnał mierzony może przyjmować dowolną wartość pomiędzy dwoma
poziomami kwantowania z jednakowym prawdopodobieństwem (p=1/q).
Stąd błąd kwantowania może być określony na przykład przez odchylenie
standardowe (wartość skuteczną szumu kwantyzacji w woltach).
12
2
2
2
2
q
dU
U
p
U
U
q
q
U
q
U
x
x
x
x
xi
xi
i
)
(
)
(
Często przydatne jest określenie (w decybelach) stosunku wartości
skutecznej sygnału wejściowego (dla pełnego zakresu przetwarzania) do
szumu kwantyzacji (S/N). Zależy on od kształtu napięcia wejściowego.
W przypadku napięcia stałego unipolarnego
8
10
02
6
12
2
20
12
2
20
,
,
)
lg
(lg
)
/
lg(
N
q
q
N
S
N
N
Rozdzielczość
przetwornika analogowo-cyfrowego określa najmniejszą wartość sygnału wejściowego
rozróżnianą przez przetwornik. Może być wyrażona przez wartość napięcia wejściowego odpowiadającą
najmniej znaczącemu bitowi słowa wyjściowego (1 LSB).
N
FS
U
q
2
W przypadku napięcia sinusoidalnego o amplitudzie międzyszczytowej
q2
N
:
76
1
02
6
5
1
2
20
12
2
2
2
20
,
,
,
lg
)
/
lg(
N
q
q
N
S
N
N
Szybkość przetwarzania
określona jest przez czas niezbędny do przetworzenia w postać cyfrową
sygnału analogowego o wartości równej pełnemu zakresowi przetwarzania.
Częstotliwość
przetwarzania
jest w przybliżeniu równa odwrotności czasu przetwarzania.
s
s
s
s
s
s
nt
kf
f
nt
nt
m
f
m
nt
f
nt
f
0
0
0
0
2
2
2
2
2
sin
sin
)
sin(
)
sin(
CPS
34
CPS
2-34
CPS
34
CPS
3-34
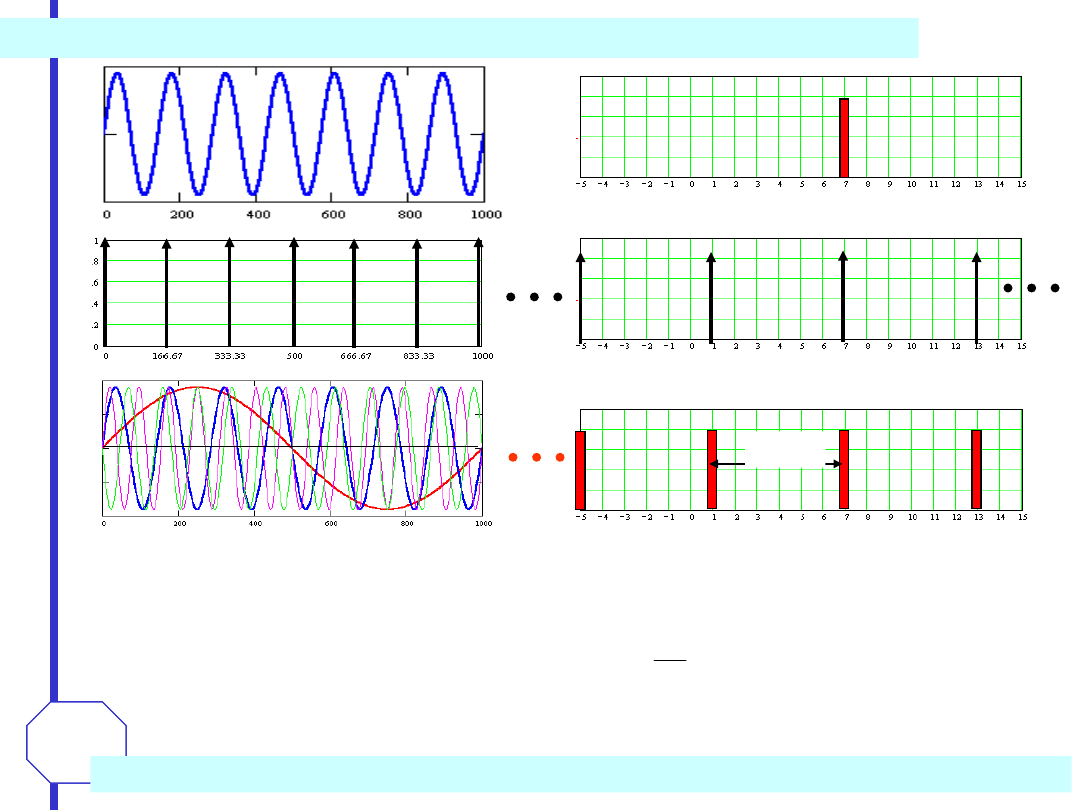
Przy próbkowaniu z częstotliwością f
s
nie można odróżnić spróbkowanych wartości sygnału sinusoidalnego o
częstotliwości f
0
Hz od spróbkowanych wartości sygnału sinusoidalnego o częstotliwości (f
0
+kf
s
) Hz.
niejednoznaczność sygnału dyskretnego w dziedzinie częstotliwości
Częstotliwość [kHz]
6 kHz
Po dyskretyzacji sygnału, jego widmo jest powielone. Okres pomiędzy powielonymi widmami
wynosi zawsze f
s
Sygnał okresowy ma widmo dyskretne. Sygnał dyskretny ma widmo okresowe.
Częstotliwość [kHz]
Częstotliwość [kHz]
[s]
f
0
=
7
k
H
z
[s]
f
s
=
6
k
H
z
[s]
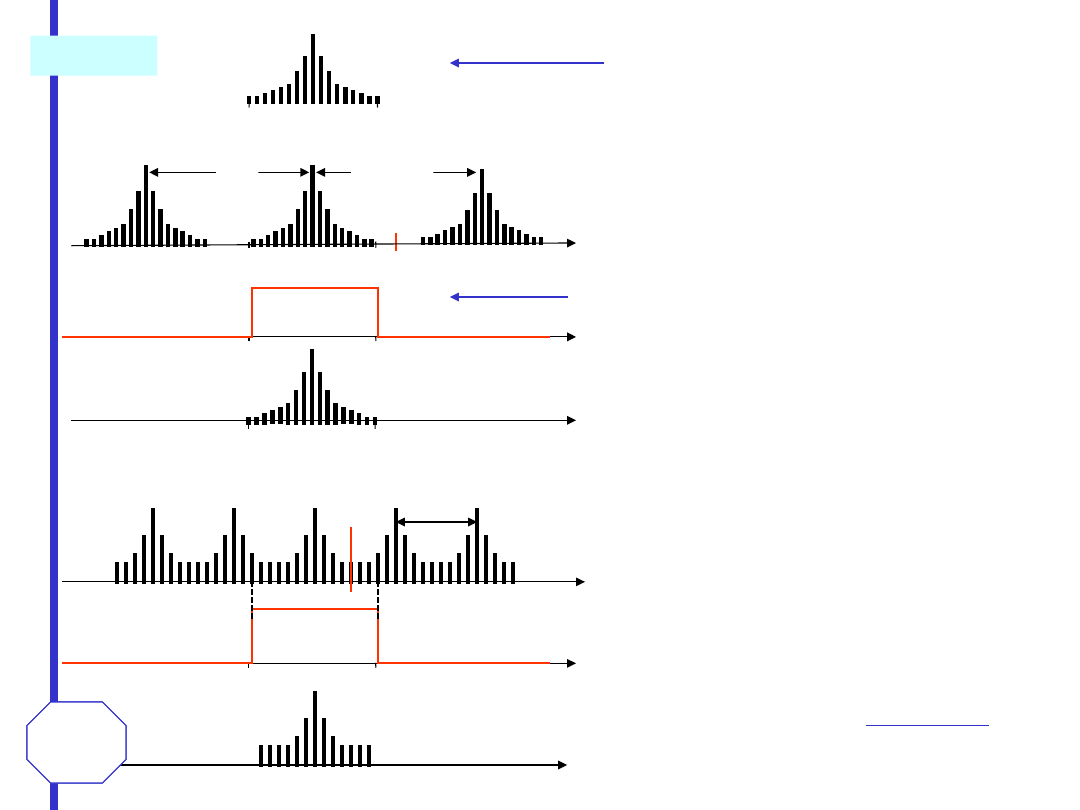
Widmo sygnału okresowego
poliharmonicznego
Po spróbkowaniu, każdy prążek widma jest
powielony okresowo z okresem f
s.
Odtworzenie sygnału oryginalnego wymaga
odfiltrowania powielonych segmentów widma
przez filtr dolnoprzepustowy.
f
g
-f
g
f
g
-f
g
f
f
g
-f
g
f
f
Charakterystyka idealnego filtru
dolnoprzepustowego o częstotliwości odcięcia f
g
.
Jeśli częstotliwość próbkowania jest co
najmniej dwa razy większa od częstotliwości
najwyższej
harmonicznej
w
sygnale
próbkowanym,
to
istnieje
możliwość
bezbłędnego odtworzenia sygnału przez
filtrację jego próbek.
f
f
g
-f
g
f
s
f
s
>2f
g
f
s
/2
Jeśli częstotliwość próbkowania nie spełnia
powyższego warunku, niemożliwe jest wierne
odtworzenie widma sygnału oryginalnego
bez względu na dobór częstotliwości odcięcia
filtru. Fragmenty sąsiednich segmentów
widma zachodzą na siebie powodując ich
zniekształcenie. Zjawisko nakładania się
widm często nazywane jest
aliasingiem.
f
g
-f
g
f
f
f
s
/2
CPS
2-35
CPS
3-35
aliasing
f
s
<2f
g
CPS
2-36
CPS
3-36
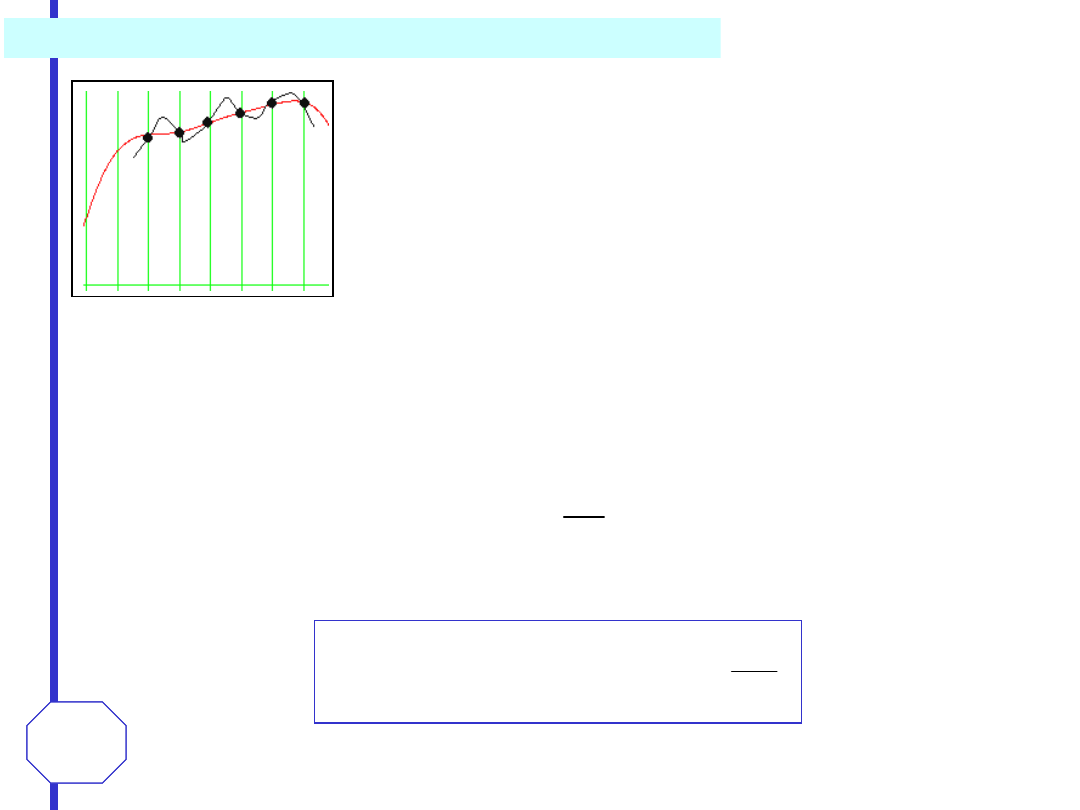
Twierdzenie Kotielnikowa-Shannona o próbkowaniu
Jeśli sygnał nie może zmieniać się zbyt szybko, to na odcinki
sygnałów łączące dwie sąsiednie próbki są narzucone pewne
więzy. Na więzy te wpływają także wartości dalszych próbek. Im
próbki leżą bliżej siebie tym więzy te są silniejsze. Przy
wystarczająco bliskim położeniu więzy te mogą być tak silne, że
przez próbki można wykreślić sygnał tylko na jeden sposób. Tak
więc intuicyjnie można przyjąć, że przy ograniczonej szybkości
zmian sygnału (w sygnale nie ma harmonicznych powyżej
pewnego progu) i przy dostatecznie gęstym próbkowaniu istnieje
możliwość odtworzenia sygnału na podstawie jego próbek.
Twierdzenie o próbkowaniu
Niech x(t) będzie sygnałem, którego widmo X(
) spełnia warunek
m
X
dla
0
)
(
Sygnał x(t) jest równoważny zbiorowi swoich próbek odległych od siebie o stały przedział
m
T
to znaczy
m
T
n
nT
x
t
x
,
,
,
);
(
)
(
1
0
CPS
2-37
CPS
3-37
Dowód
Widmo sygnału poddane zostanie dwóm wzajemnie znoszącym się operacjom. Najpierw
operacji powielenia okresowego przez splecenie widma w dziedzinie częstotliwości z
dystrybucją grzebieniową. Powstaje w ten sposób widmo o okresie 2
m
równym odstępowi
między impulsami Diraca w dystrybucji grzebieniowej. Następnie widmo to poddawane jest
operacji idealnej filtracji poprzez pomnożenie go przez charakterystykę idealnego filtru
dolnoprzepustowego o pulsacji odcięcia
m
.
m
m
m
III
X
X
2
2
2
1
)
(
)
(
Dokonując odwrotnego przekształcenia Fouriera obu stron powyższego równania otrzymuje
się
1
2
1
2
n
m
m
m
m
t
Sa
nT
t
nT
x
t
Sa
T
t
III
T
t
x
t
Sa
T
t
III
t
x
t
x
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
m
m
T
2
2
)
(
)
(
0
0
0
2
t
Sa
T
III
T
t
III
T
2
1
0
0
)
(
)
(
Uwzględniając właściwości splotu dystrybucji Diraca z dowolną funkcją
)
(
)
(
)
(
0
0
t
t
x
t
t
t
x
ostatecznie otrzymuje się
n
m
nT
t
Sa
nT
x
t
x
)
(
)
(
)
(
Udowadnia to tezę twierdzenia o próbkowaniu.
Znajomość wartości próbek sygnału wystarcza do odtworzenia pozostałych wartości
sygnału.
CPS
2-38
CPS
3-38
CPS
2-38
CPS
3-38
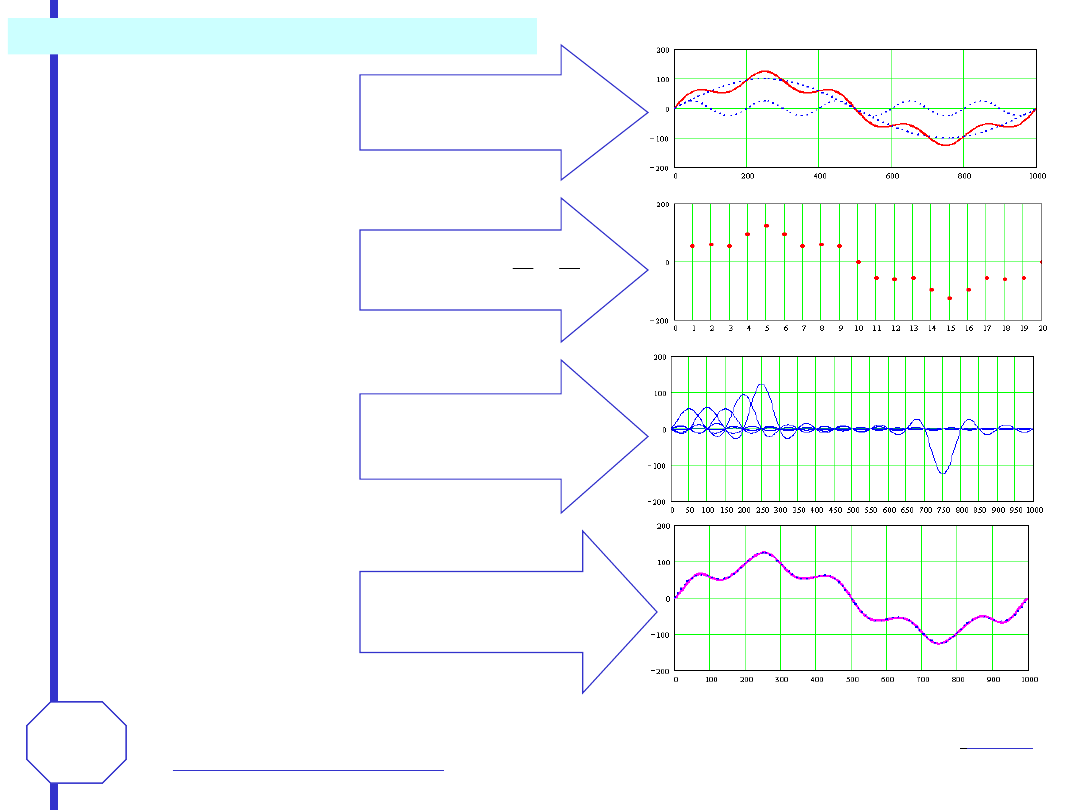
Odtwarzanie sygnału na podstawie próbek
t
x
p
p
p
T
t
III
T
1
t
x
nT
x
p
m
p
nT
t
Sa
nT
x
N
1
p
m
p
nT
t
Sa
nT
x
t
x
Na wyjściu filtru następuje sumowanie odpowiedzi na ciąg próbek reprezentujących sygnał
ciągły. Przy zachowaniu wymagań wynikających z twierdzenia Kotielnikowa-Shannona (
idealne
próbkowanie i idealna filtracja
) sygnał wyjściowy filtru jest identyczny z sygnałem wejściowym.
sygnał oryginalny
próbki sygnału oryginalnego
odpowiedź idealnego
filtru na kolejne próbki
sygnał odtworzony jako
suma odpowiedzi
idealnego filtru na
próbki sygnału
CPS
2-39
CPS
3-39
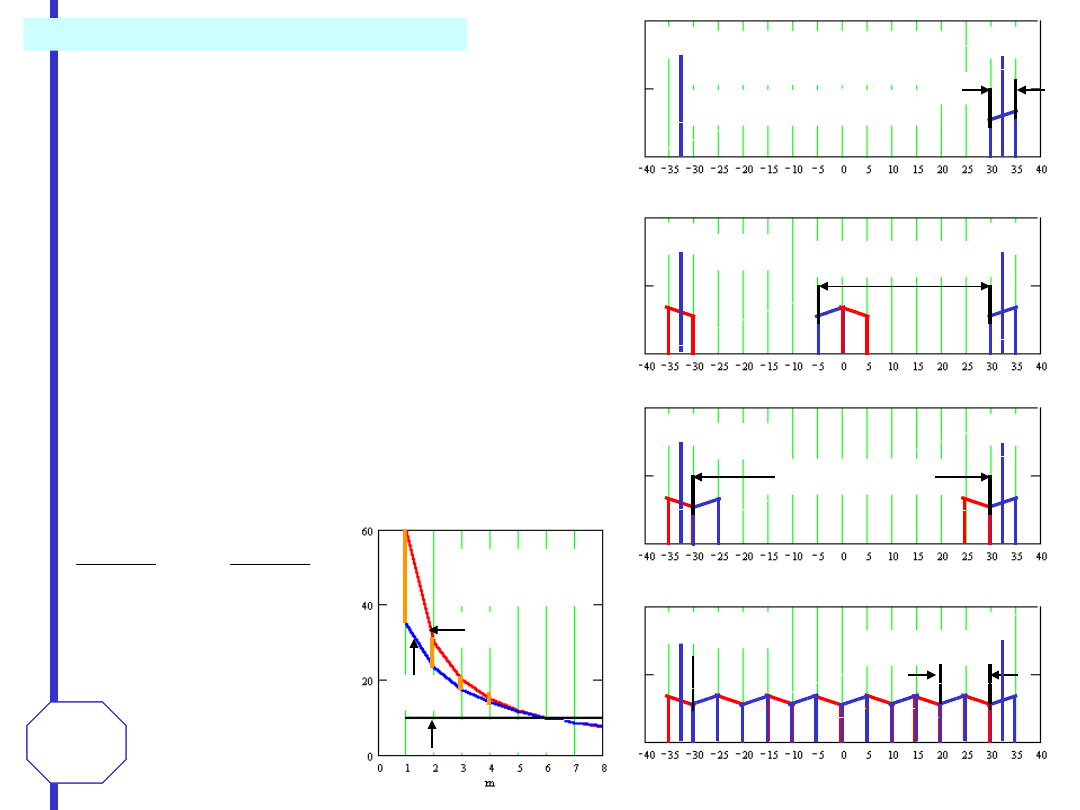
próbkowanie pasmowe - podpróbkowanie
Struktura częstotliwościowa powielonego widma
jest identyczna jak struktura częstotliwościowa
sygnału oryginalnego. Zmienione jest tylko
położenie widma na osi częstotliwości. Tak więc na
podstawie próbek pobieranych z częstotliwością
znacznie mniejszą od częstotliwości Nyquista
można wiernie odtworzyć informację zawartą w
sygnale
pasmowy
pod
warunkiem,
że
częstotliwość
„podpróbkowania”
spełnia
następujący warunek:
W praktyce występują sygnały, których widmo
jest skupione wokół pewnej częstotliwości
środkowej f
C.
i zajmuje pasmo B znacznie
mniejsze od od f
C.
Wykorzystując właściwość
okresowego powielenia widma sygnału po jego
spróbkowaniu, można odtworzyć sygnał pasmowy
bez
konieczności
próbkowania
go
z
częstotliwością spełniającą warunek Kotielnikowa-
Shannona.
1
2
2
m
B
f
f
m
B
f
C
S
C
gdzie m jest liczbą
naturalną taką, że
-f
C
f
C
częstotliwość [MHz]
f
SMIN
=f
SMAX
=2B
m=6
f
SMAX
=2f
C
-B=60MHz
-f
C
f
C
częstotliwość [MHz]
m=1
f
SMIN
=f
C
+B/2=35MHz
-f
C
f
C
częstotliwość [MHz]
m=1
B
f
S
2
f
C
= 32,5 MHz,
B = 5 MHz
2B = 10 MHz
f
SMIN
f
SMAX
C
zę
st
o
tl
iw
o
ść
[
M
H
z]
B
-f
C
f
C
częstotliwość [MHz]
Widmo sygnału pasmowego
przed próbowaniem
f
C
= 32,5 MHz, B = 5 MHz
CPS
2-40
CPS
3-40
Z twierdzenia Kotielnikowa-Shannona wynika teoretyczna możliwość przekazywania informacji zawartej
w sygnale ciągłym za pomocą jego próbek, przy założeniu, że sygnał ma ograniczone widmo (f
g
) i
próbkowany jest z częstotliwością f
s
nie mniejszą niż 2f
g.
Należy jednak zdawać sobie sprawę z różnicy
między teorią a fizyczną rzeczywistością. Istnieją trzy zasadnicze rozbieżności:
•
Sygnały rzeczywiste mają widmo nieograniczone (kryterium
Paleya-Wienera)
•
Impulsy Diraca są nierealizowalne w praktyce
•
Idealny filtr dolnoprzepustowy jest nierealizowalny w praktyce
próbkowanie rzeczywiste
Widmo każdego sygnału fizycznego ma charakter
malejący ze wzrostem częstotliwości i przyjmuje wartości
pomijalnie małe powyżej pewnej częstotliwości f
g.
różnej
dla różnych sygnałów. Ponadto, często znane jest pasmo,
w którym zawarta jest użyteczna informacja. W celu
uniknięcia aliasingu, sygnał ciągły przed próbkowanie
poddawany jest filtracji przez tzw.
filtr antyaliasingowy
o
arbitralnie ustalonej częstotliwości odcięcia f
g
. W wyniku
działania
filtru
na
układ
próbkująco-pamiętający
podawany jest sygnał, w którym praktycznie występują
tylko harmoniczne zawierające użyteczną informację.
filtr
antyaliasingowy
f
f
g
-
f
g
f
widmo sygnału
za filtrem
antyaliasingowy
m
-f
g
... f
g
pasmo, w
którym
przenoszona
jest informacja
f
f
g
-
f
g
przed próbkowaniem
f
f
g
-
f
g
f
s
f
s
/2
po próbkowaniu
Taki sygnał może być próbkowany z częstotliwością równą co najmniej 2f
g
bez
obawy, że nastąpi nakładanie się sąsiednich segmentów widma.
rzeczywiste widmo sygnału
CPS
2-41
CPS
3-41
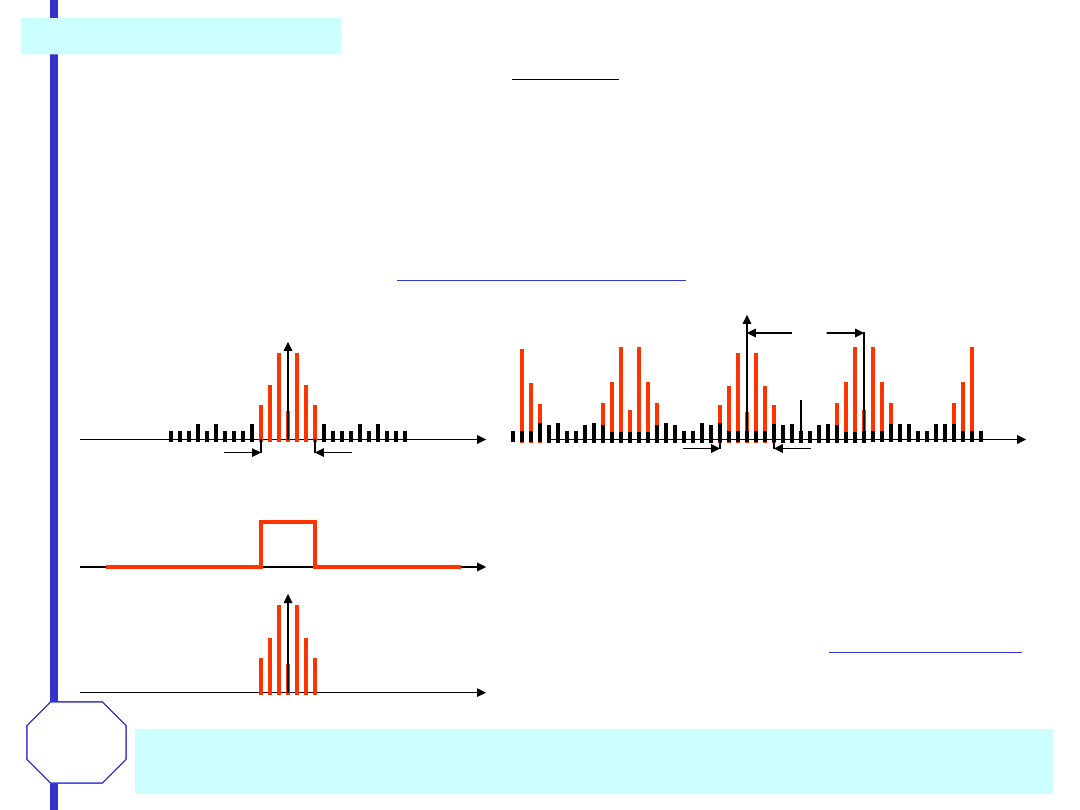
W praktycznej realizacji próbkowania, idealna dystrybucja grzebieniowa (niemożliwa do
zrealizowania) zastępowana jest prostokątną falą nośną (możliwą, w przybliżeniu, do
zrealizowania). W takim przypadku widmo sygnału próbkowanego splatane jest z widmem
fali prostokątnej. Widmem fali prostokątnej jest ciąg impulsów widmowych oddalonych o
1/t
s
, których obwiednią jest funkcja typu Sa.
t
g
s
f
2
1
t
A
t
t
f
f
)
t
n
(
Sa
t
A
)
nf
(
X
s
s
s
f
1
s
t
1
Widmo sygnału spróbowanego falą prostokątną jest ciągiem oddalonych od siebie o 2f
g
segmentów widmowych, z których każdy jest tego samego kształtu co widmo sygnału
informacyjnego. Odtworzenie sygnału informacyjnego jest możliwe za pomocą filtru o
częstotliwości odcięcia równej f
g
.
Sygnał informacyjny
Widmo sygnału informacyjnego
rzeczywisty kształt impulsów próbkujących

CPS
2-42
CPS
3-42
Kolejne folie
w
przygotowaniu
CPS
2-43
CPS
3-43
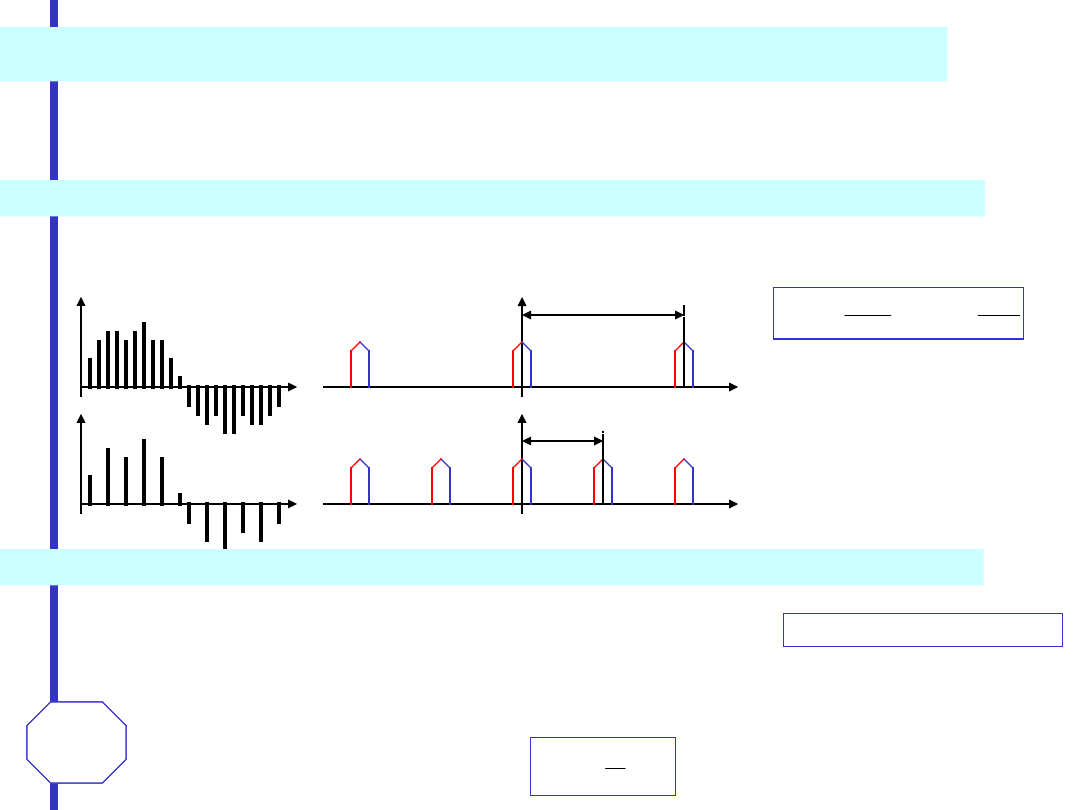
CYFROWA ZMIANA SZYBKOŚCI PRÓBKOWANIA
Zmiana użytkowej częstotliwości próbkowania dokonywana na zbiorach liczb reprezentujących próbki
rzeczywistego sygnału. Stosowana jest wtedy, gdy częstotliwość fizycznego próbowania sygnału nie jest
odpowiednia (za duża lub za mała) dla realizacji konkretnego algorytmu cyfrowego przetwarzania
sygnałów.
decymacja -
zmniejszenie szybkości próbkowania o dowolny czynnik całkowity (D)
Wynik
decymacji
jest
identyczny
z
wynikiem
rzeczywistego prób-kowania
z częstotliwością f
NEW
.
Granica, do której można
prowadzić
decymację
wynika z twierdzenia o
próbkowaniu,
to
znaczy
f
NEW
>2B.
Zapewnia
to
uniknięcie aliasingu.
t
f
f
OLD
n
OLD
t
f
f
NEW
n
NEW
D
f
f
D
N
N
OLD
NEW
OLD
NEW
,
interpolacja -
zwiększenie szybkości próbkowania o dowolny czynnik całkowity (I)
Decymacja polega na odrzuceniu pewnej liczby ze zbioru próbek tak aby powstał nowy zbiór o liczbie
próbek D razy mniejszej.(D jest liczbą całkowitą). Dla N próbek ponumerowanych od p(0) do p(N-1) przy
decymacji o czynnik D pozostawiane są próbki p(Dn), gdzie n=0,1,2,3 itd.
Interpolacja o czynnik całkowity I polega na obliczeniu (I-1) nowych wartości
próbek równomiernie rozłożonych pomiędzy sąsiednimi próbkami
pochodzącymi z fizycznego procesu próbkowania. Cyfrowa filtracja (filtr
interpolacyjny) umożliwia obliczenia wartości próbek w dyskretnych
chwilach czasu.
Połączenie interpolacji z decymacją umożliwia przetworzenie zbioru rzeczywistych próbek sygnału
pobranych z częstotliwością f
OLD
w zbiór próbek tego samego sygnału odpowiadających
próbkowaniu z częstotliwością
OLD
NEW
OLD
NEW
If
f
IN
N
,
OLD
NEW
f
D
I
f

CPS
2-44
CPS
3-44
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
- Slide 44
Wyszukiwarka
Podobne podstrony:
Cyfrowe przetwarzanie sygnałów fonicznych (CPSF) wykład 06 art
Cyfrowe przetwarzanie sygnałów fonicznych (CPSF) wykład 06 art
1f Cyfrowe przetwarzanie sygnal Nieznany
30 Cyfrowe przetwarzanie sygnałów
1f Cyfrowe Przetwarzanie sygnałów
zad egz 2002-, Inżynieria Akustyczna, 4 semestr, CPS - Cyfrowe Przetwarzanie Sygnałów, ZADANIA EGZAM
Cyfrowe przetwarzanie sygnałów
Cyfrowe Przetwarzanie Sygnalow Nieznany
zad egz 2001-, Inżynieria Akustyczna, 4 semestr, CPS - Cyfrowe Przetwarzanie Sygnałów, ZADANIA EGZAM
Cyfrowe przetwarzanie sygnalow Nieznany (2)
filtr-cyfrowy, Politechnika, IV sem, Cyfrowe Przetwarzanie Sygnałów i Obrazów
TS 15 Wrzesnia 2003r, Inżynieria Akustyczna, 4 semestr, CPS - Cyfrowe Przetwarzanie Sygnałów, ZADANI
falki, Inżynieria Akustyczna, 4 semestr, CPS - Cyfrowe Przetwarzanie Sygnałów, ZADANIA EGZAMIN 2
Wysylanie wiadomosci e mail Cyfrowe przetwarzanisygnalow Filtry, Cyfrowe przetwarzanisygnałów Filtry
1 Cyfrowe przetwarzanie sygnalow(CPS) Wprowadzenieid 9141 ppt
1f Cyfrowe przetwarzanie sygnal Nieznany
więcej podobnych podstron