
· Output erhöhen
· Qualität sichern
· Kosten senken
FLEXIBLE AUTOMATIONSLÖSUNGEN
FÜR WERKZEUGMASCHINEN
AD4209
2
8 Stufen zu hocheffi zienter Automations-Lösung:
1. Standardisierung der Arbeiten und Einführung eines Spann- und Palettiersystems
2. Auftragsplanung
3. CNC Programmierung am CAD/CAM Arbeitsplatz (nicht an der Maschine)
4. Vorbereitung des Werkstückrohmaterials nach standardisierten Richtlinien
5. Planung des Werkstückfl usses durch die Fertigung
6. Rüsten, Palettierung und Voreinstellung erfolgt hauptzeitparallel
7. Automatische Beladung der Maschinen mittels Handlinggeräten bzw. Robotern
8. Integration eines Fertigungssteuerungssystems in die Unternehmensstruktur
Fertigungsunternehmen stehen heute vor großen Herausforderungen. Kunden fordern immer kür-
zere Lieferzeiten. Auch kleinere Losgrößen müssen noch bezahlbar produziert werden. Der Kosten-
druck wächst.
HIRSCHMANN bietet Ihnen Automations-Lösungen zur Produktion von Werkstücken in kleinen und
großen Stückzahlen, in kürzerer Zeit, mit gleichbleibend hoher Qualität zu geringeren Kosten.
Die EROBOT Reihe ist die einfach einzusetzende und doch individuelle Automationslösung für
Erodier- oder CNC-Bearbeitungsmaschinen. Die EROBOTs werden direkt neben der Maschine
platziert und managen den Lade-/Entlade-Prozess der Werkstücke.
Mit den 6-Achs-Robotern entwickeln und realisieren wir für Sie auch hochkomplexe Automations-
lösungen optimal zugeschnitten auf Ihre Produktion und Werkstück-Anforderungen
Sinnvoll ist die Einführung der Automation in Stufen. Dadurch können die
Mitarbeiter Schritt für Schritt in der neuen Arbeitsweise eingewiesen werden.
Fertigungssteuerung von
automatischen Fertigungszellen
Automatisiertes Beladen von
Werkstücken (Werkzeugen)
Werkstück-,
Werkzeugpalettierung,
Hauptzeitparalleles Rüsten
Bereitstellen von
Bearbeitungsdaten (NC-Programme)
Stufen der
Automatisierung
Komplexität
• Fertigungssteuerungs-
system
• Handlinggerät
• Roboter
• Übertragung der NC-Programme
mittels DNC
• Ausrüstung der Maschinen mit kompatiblen
Spann- und Palettiersystemen
• Werkstück- und Werkzeugvoreinstellung
Flexible Automationslösung für Werkzeugmaschinen
Output erhöhen,
Qualität sichern,
Kosten senken.
A
8 Stufen zu hocheffi zienter Automations-Lösung:
1. Standardisierung der Arbeiten und Einführung eines Spann- und Palettiersystems
3. CNC Programmierung am CAD/CAM Arbeitsplatz (nicht an der Maschine)
4. Vorbereitung des Werkstückrohmaterials nach standardisierten Richtlinien
5. Planung des Werkstückfl usses durch die Fertigung
6. Rüsten, Palettierung und Voreinstellung erfolgt hauptzeitparallel
7. Automatische Beladung der Maschinen mittels Handlinggeräten bzw. Robotern
8. Integration eines Fertigungssteuerungssystems in die Unternehmensstruktur
Sinnvoll ist die Einführung der Automation in Stufen. Dadurch können die
Mitarbeiter Schritt für Schritt in der neuen Arbeitsweise eingewiesen werden.
A
A
A
A
Fertigungssteuerung von
automatischen Fertigungszellen
Automatisiertes Beladen von
Werkstücken (Werkzeugen)
Bearbeitungsdaten (NC-Programme)
Komplexität
• Fertigungssteuerungs-
system
• Handlinggerät
• Roboter
• Übertragung der NC-Programme
mittels DNC
• Ausrüstung der Maschinen mit kompatiblen
Spann- und Palettiersystemen
• Werkstück- und Werkzeugvoreinstellung
Kosten senken.
Kosten senken.
3
U
U
U
U
U
U
U
U
U
U
U
U
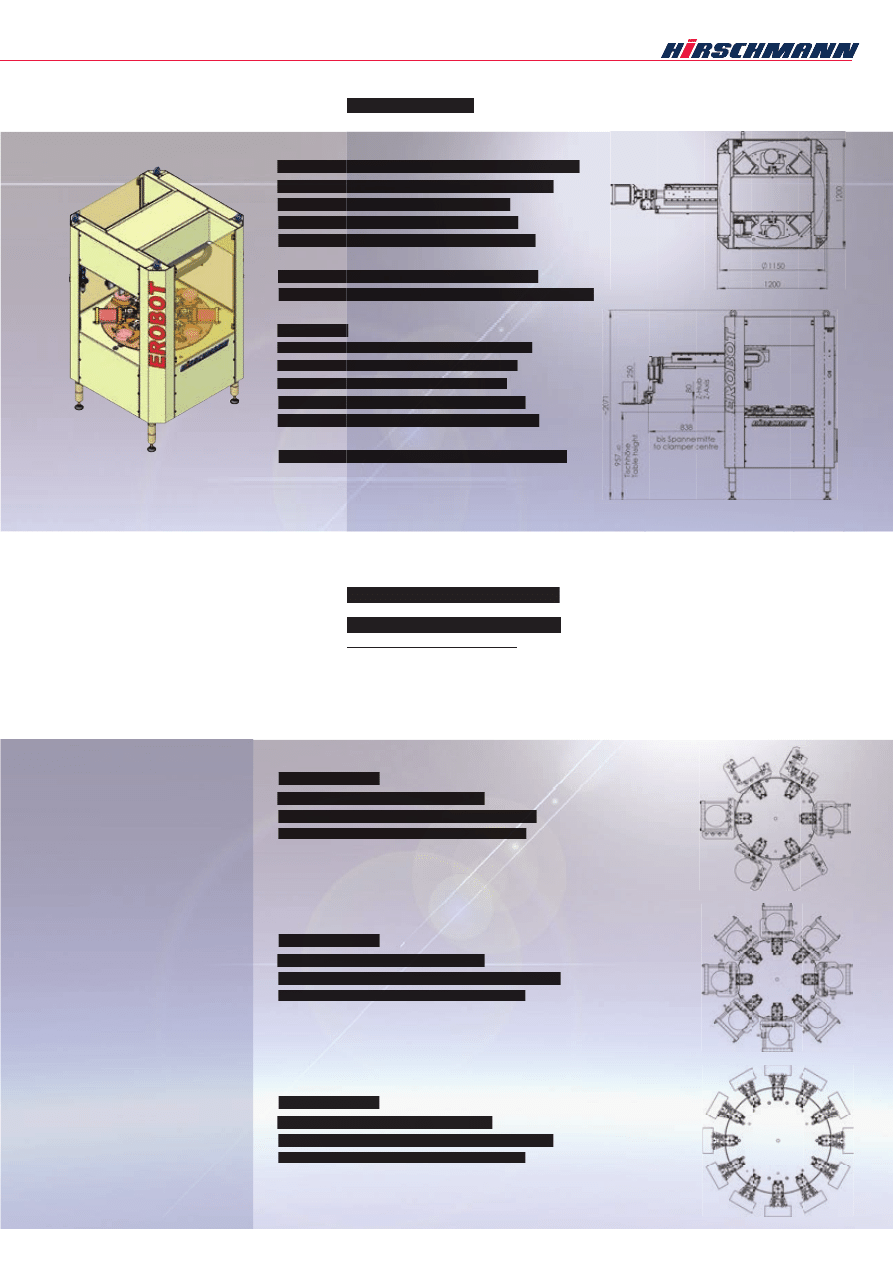
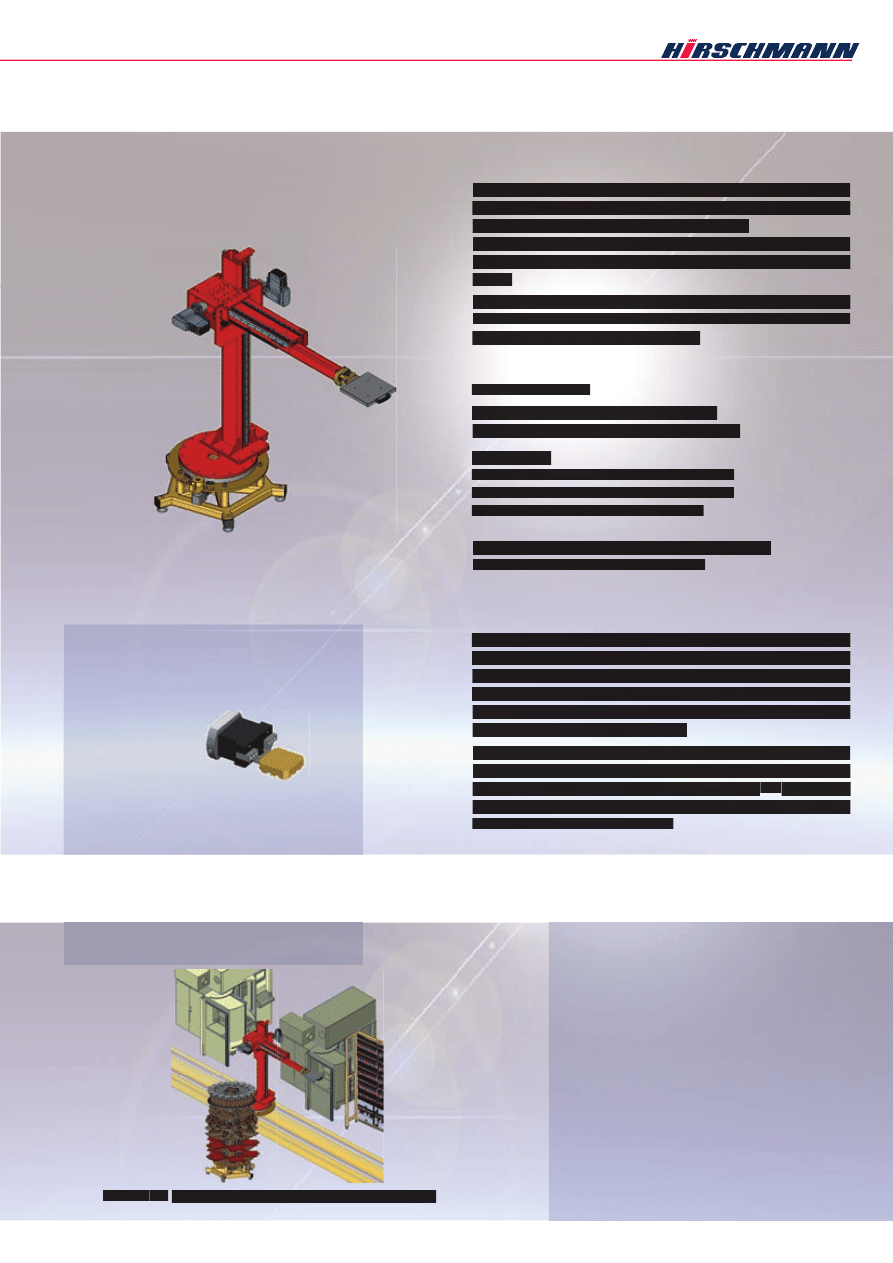
EROBOT 4000 für Drahterodiermaschinen
U
U
• 90% weniger Maschinenstillstand
U
U
• Günstige Maschinenstundensätze
U
U
• Steigerung der Produktivität
U
U
A
A
4
T
T
T
T
O
5
5
140
19
0
4
22,5°
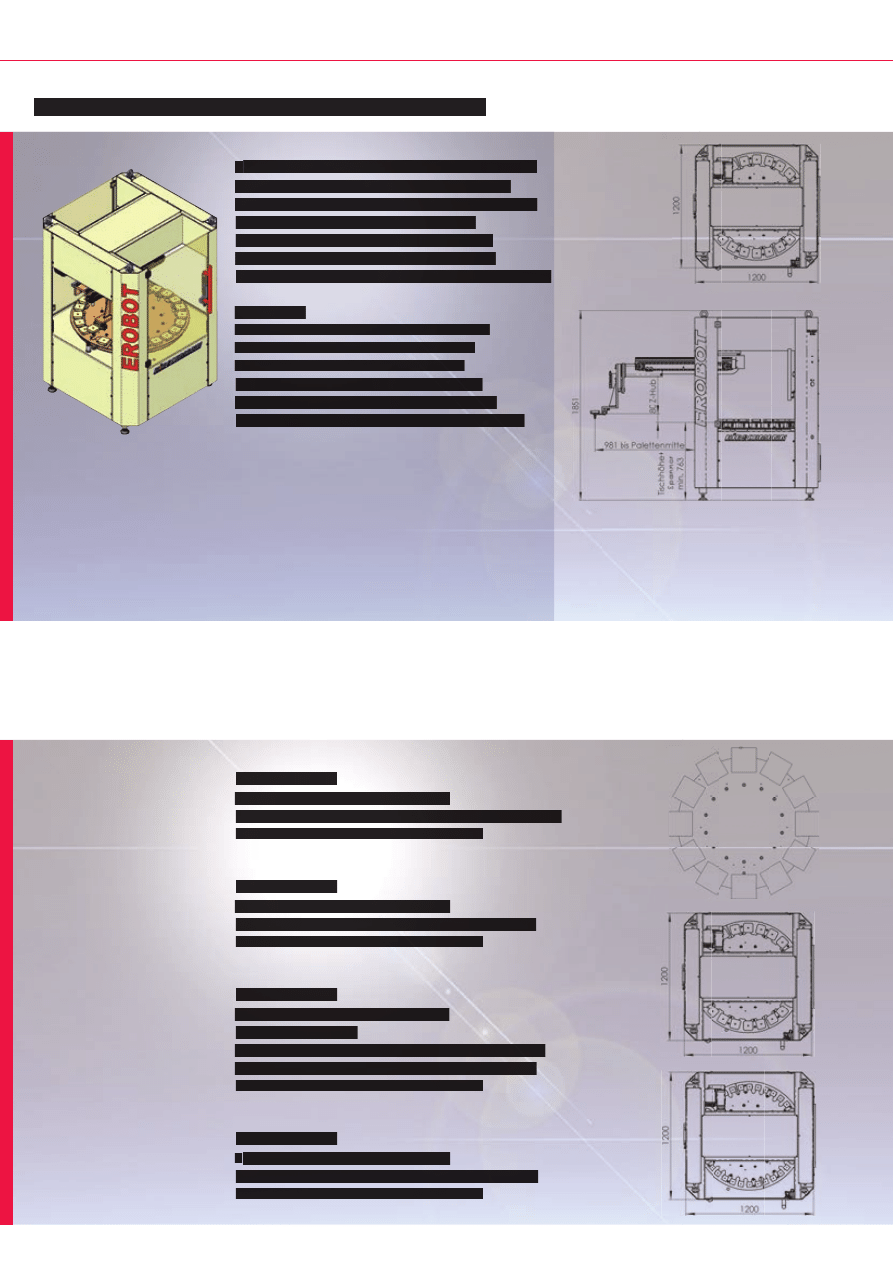
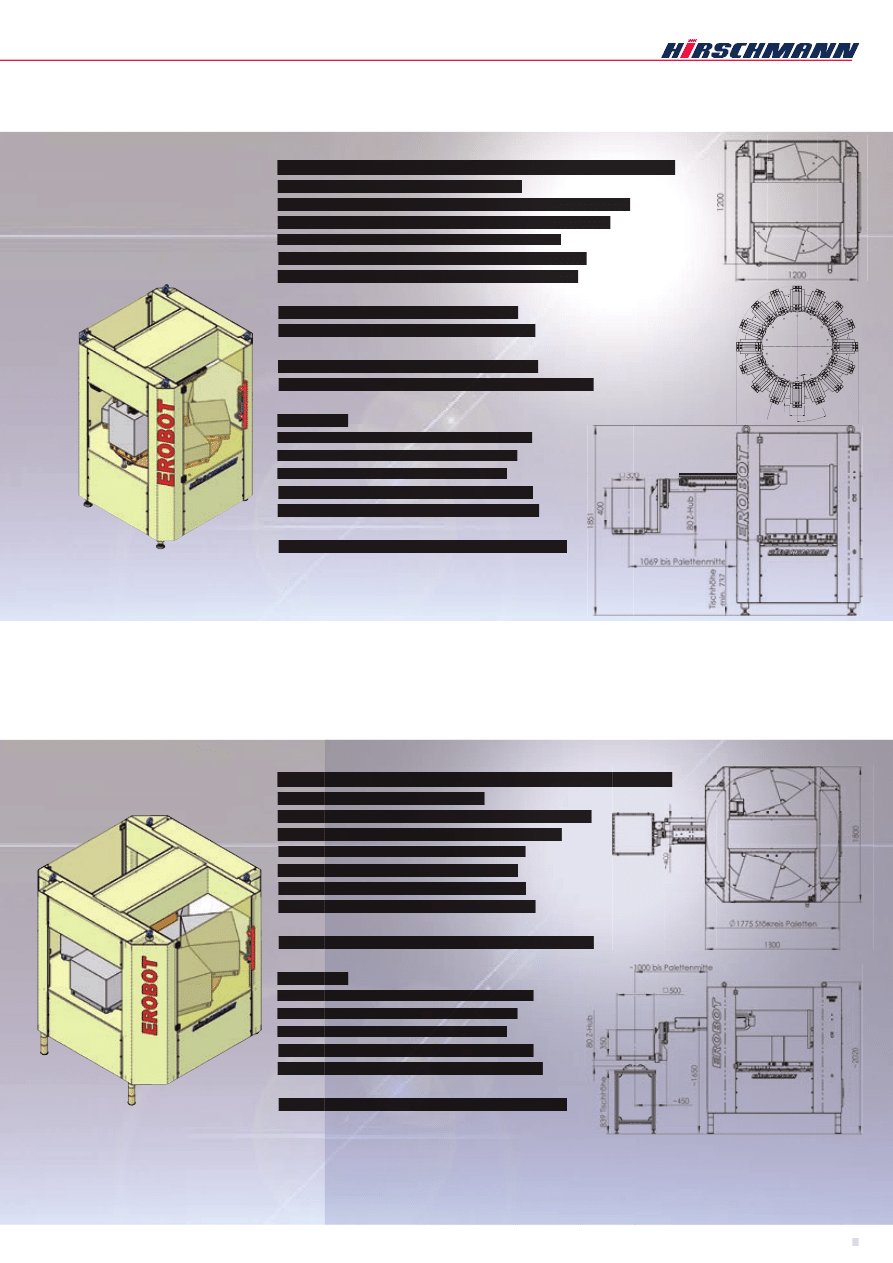
EROBOT 8000/9000 für CNC-Bearbeitungsmaschinen

6
M
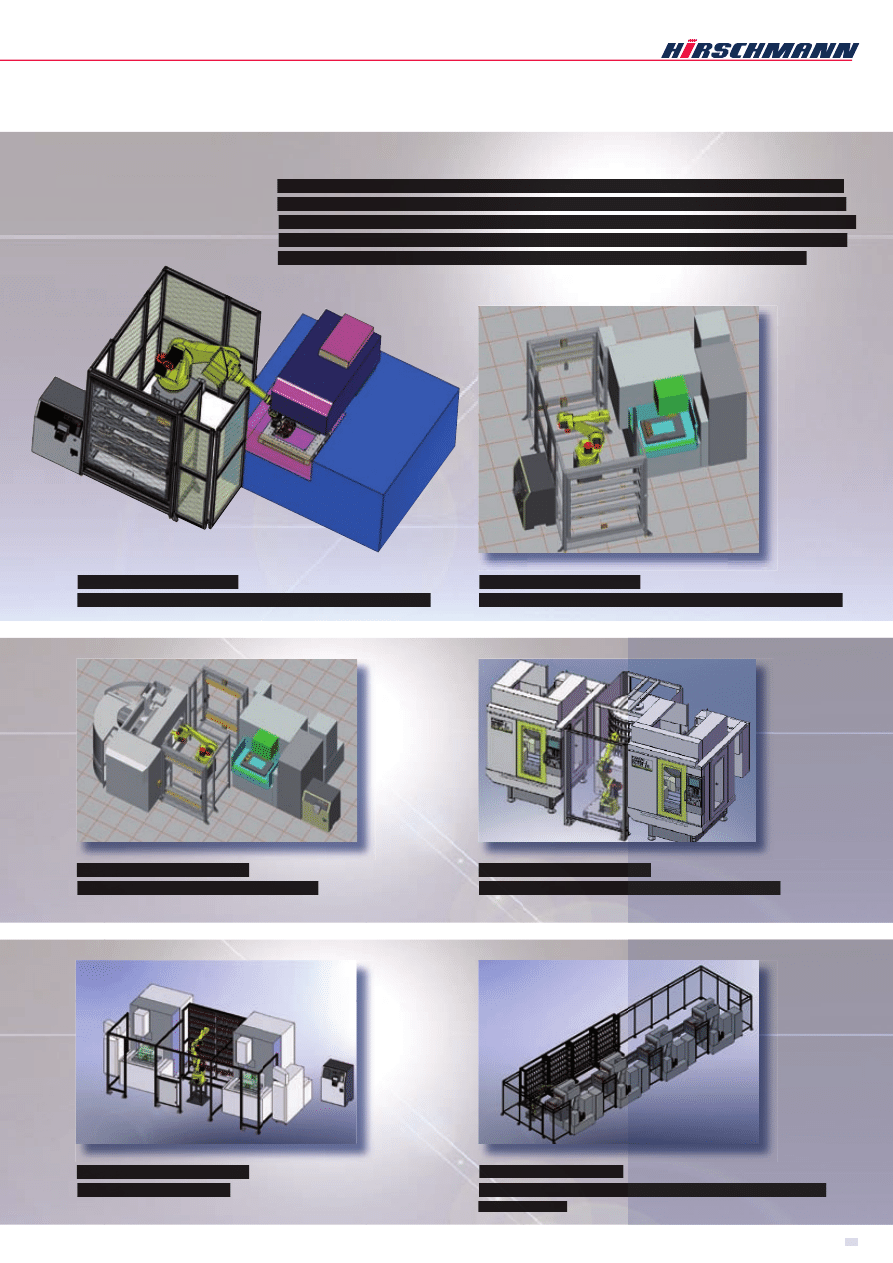
EROBOT Anwendungsbeispiele
EROBOT Anwendungsbeispiele
an
A
7
7
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
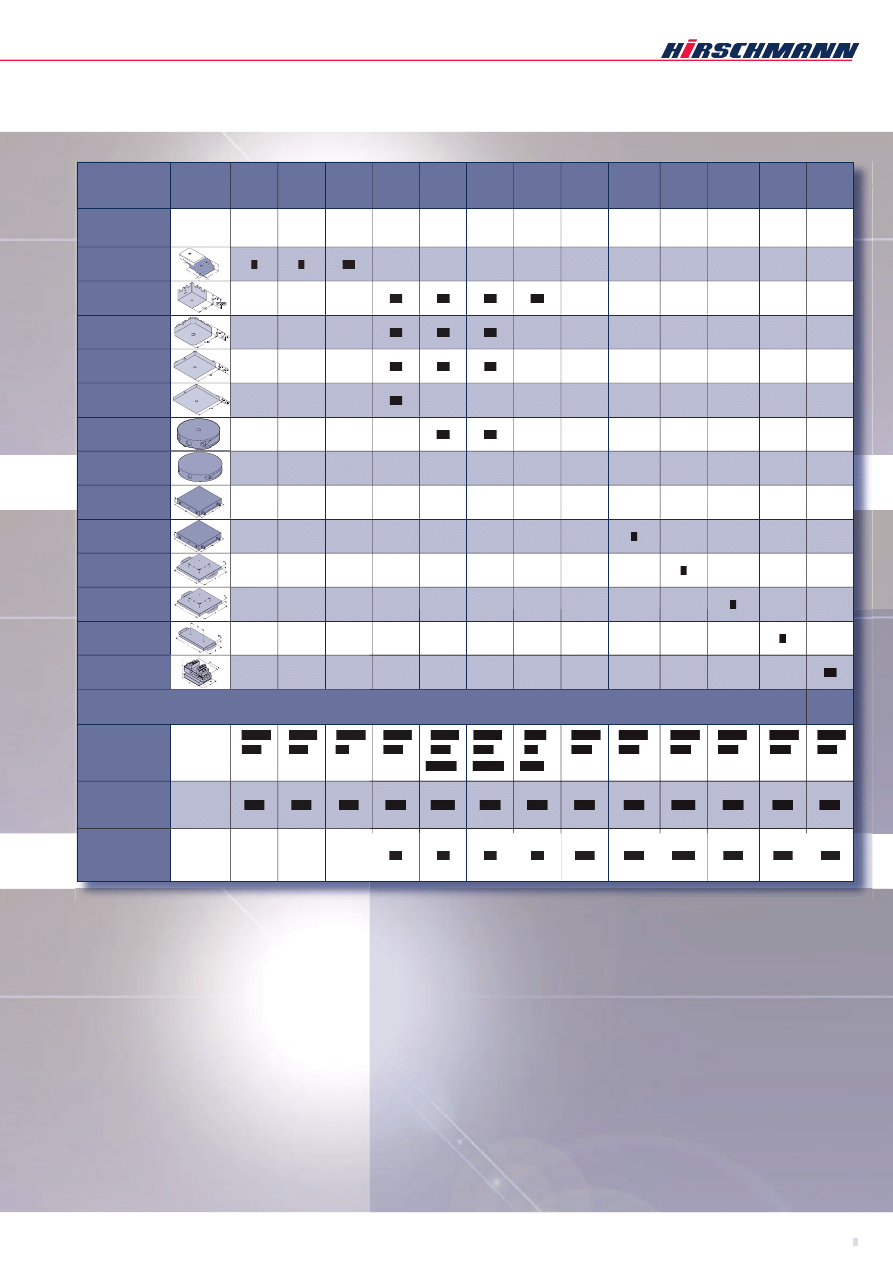
Typ EROBOT
4006
4008
4012
6012
6018
6024
6036
8005
8005-XL 9005
9005-XL 9008
9016
Spannsyst./
Plätze
4000
5000 H5.50
5000 H8.88
5000 H8.128
5000 H8.180
5000 H6.105
5000 H6.148
18
8000 H8.320
5
8000 H8.500
5000 H9.3232
9000 H9.5050
9000 H9.3623
A
H9.1613.ZSK
A
Werkstückab-
messung max.
L x B (mm)
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
Werkstückhö-
he max. (mm)
A
A
A
A
A
A
A
A
A
A
Transferge-
wicht (kg)
35
35
35
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
EROBOT Übersicht Palettengrößen, Magazinplätze und Transfergewichte
„Durch die Automationslösung von
HIRSCHMANN konnten wir unsere
Produktivität je nach Anwendung um
25 bis 100% erhöhen.“
Dominick Saratore
C & S Machine Products
Buchanan, MI
„Der Einsatz des HIRSCHMANN EROBOTs ermögli-
cht uns auch bei Einzelteilen deutlich höhere Ma-
schinenlaufzeiten. Nacht- und Wochenendstunden
sind verlässlich mannlos nutzbar.“
Nico King
Eroform GmbH & Co. KG, Eschbronn

f
f
f
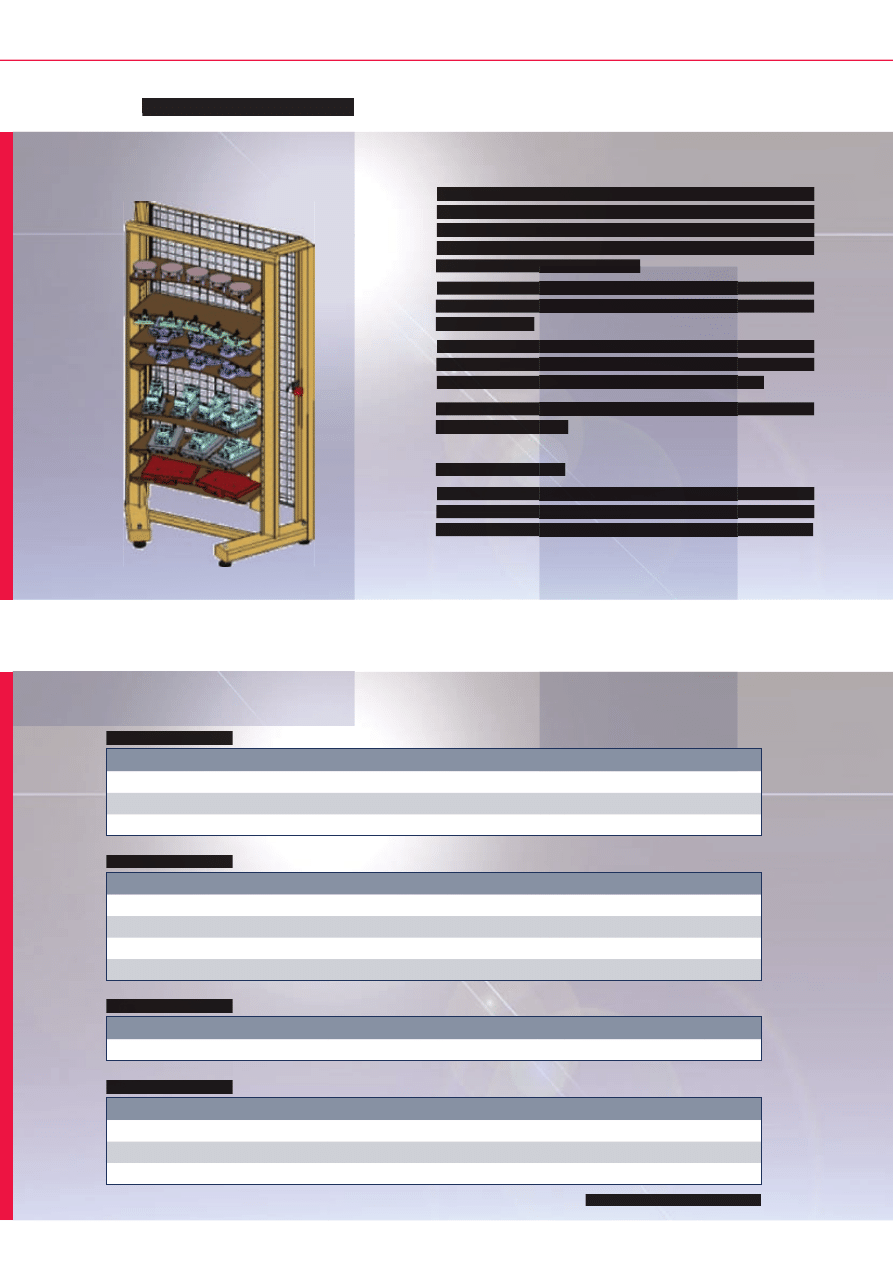
8
EROBOT
fl ex
- Modulares Handlingsystem für CNC-Werkzeugmaschinen
f
f
f
f
f
f
Merkmale
e x
9
Wechselmodul
Wechselgreifer
l
f
ff
f
10
EROBOT
fl ex
- Modulares Handlingsystem für CNC-Werkzeugmaschinen
f
f
f
f
f
f
Magazinplätze pro Leiste
Palettentype
Max. Werkstückabmessungen
4
H9.1613ZSK.PG, H9.1613.PG
140x190 mm
3
H9.3018.PG
300x190 mm
2
H9.3232.15.PG
320x320 mm
Magazinplätze pro Leiste
Palettentype
Max. Werkstückabmessungen
2
H8.320..
320x320 mm
Magazinplätze pro Leiste
Palettentype
Max. Werkstückabmessungen
12
H5.50
50x50, Ø 60 mm
7
H8.88
88x88, Ø 105 mm
5
H8.128
128x128, Ø 145 mm
5
H8.148
130x130 , Ø 155mm
Magazinleisten
Magazinplätze pro Leiste
Haltertype
Max. Werkstückabmessungen
6
H4xxx
(ohne H4225, H4231, H4631)
120x120 mm
3
H4225, H4631
180x200 mm
3
H4231
180x170 mm
Regal-Magazinmodul
e x
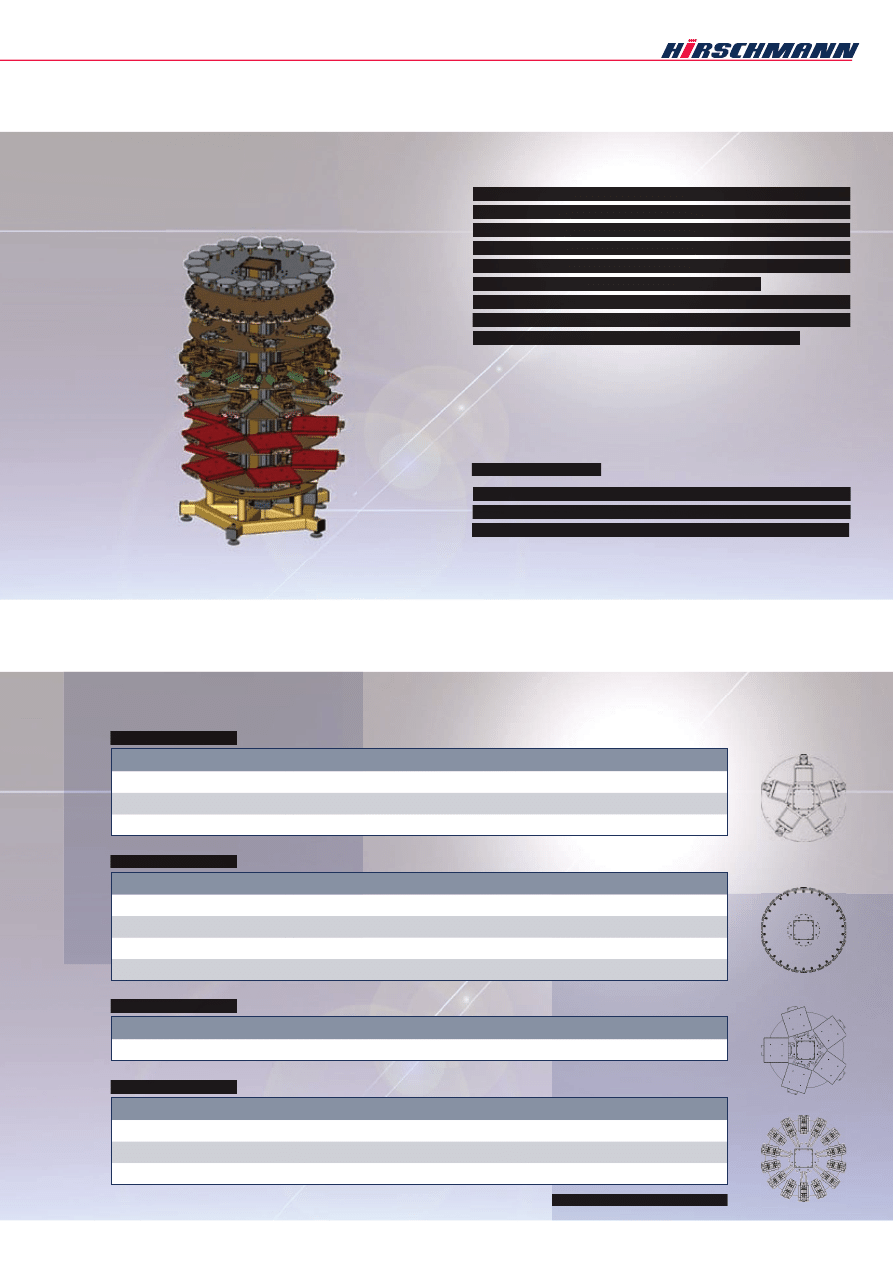
11
Dreh-Magazinmodul
Magazinplätze pro Teller
Palettentype
Max. Werkstückabmessungen
14
H9.1613ZSK.PG, H9.1613.PG
140x190 mm
8
H9.3018.PG
300x190 mm
5
H9.3232.15.PG
320x320 mm
Magazinplätze pro Teller
Palettentype
Max. Werkstückabmessungen
50
H5.50
50x50, Ø 55 mm
30
H8.88
88x88, Ø 95 mm
20
H8.128
128x128, Ø 145 mm
18
H8.148
130x130 , Ø 148mm
Magazinplätze pro Teller
Haltertype
Max. Werkstückabmessungen
10
H4xxx
(ohne H4225, H4231, H4631)
120x120 mm
6
H4225, H4631
180x200 mm
5
H4231
180x170 mm
Magazinplätze pro Teller
Palettentype
Max. Werkstückabmessungen
5
H8.320..
320x320 mm
Magazinteller
12
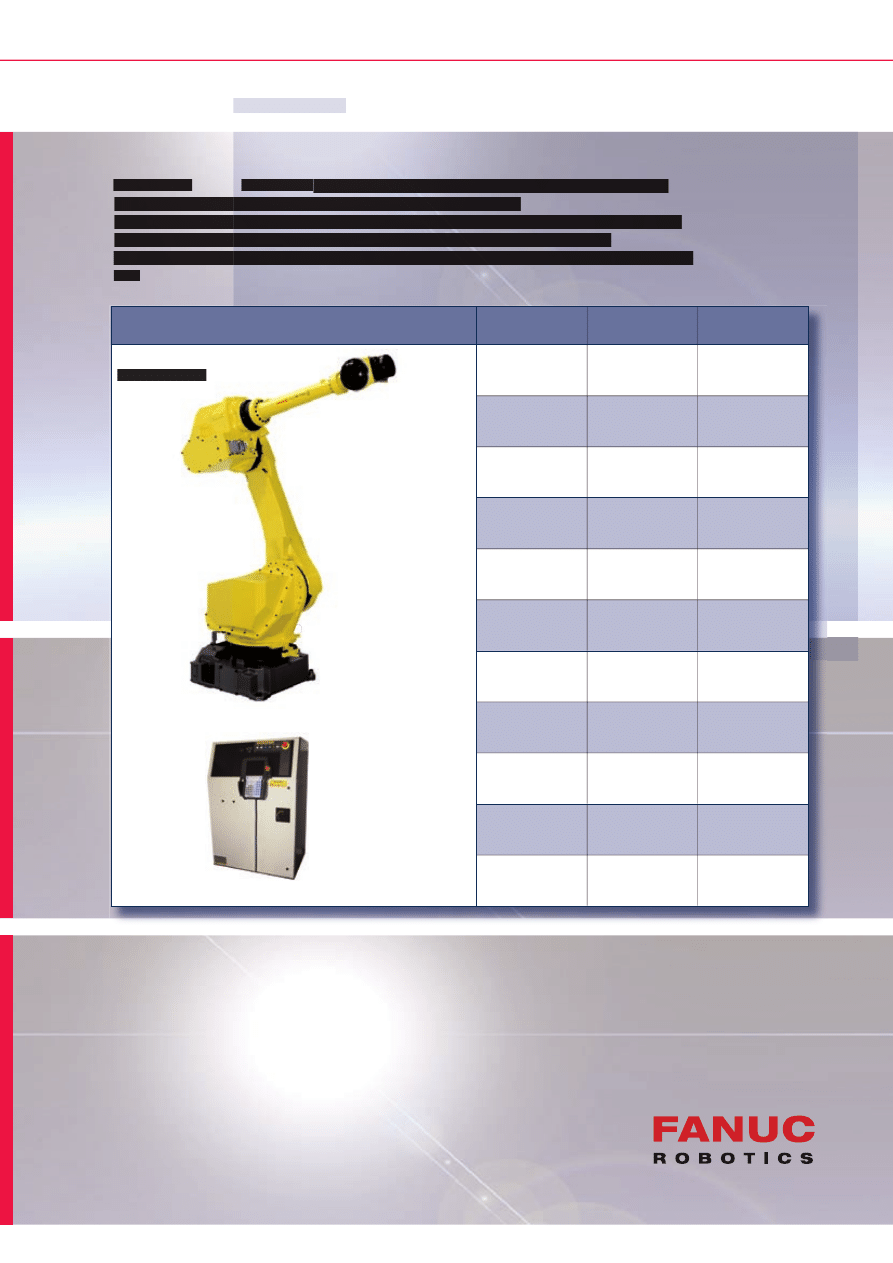
Automation mit 6-Achs-Robotern
T
Automation mit 6-Achs-Robotern
Automation mit 6-Achs-Robotern
6-Achsroboter und Robotersteuerung
Traglast
Achsen
Reichweite
5 kg
6
704 mm
5 kg
6
892 mm
10 kg
6
1.885 mm
20 kg
6
1.667 mm
50 kg
6
2.050 mm
70 kg
6
2.050 mm
125 kg
6
3.005 mm
165 kg
6
3.095 mm
175 kg
6
2.852 mm
200 kg
6
3.095 mm
210 kg
6
2.655 mm
FANUC
6-Achs-Roboter Layout (Beispiele)
I
13
13
6-Achsroboter und Robotersteuerung
Traglast
Achsen
Reichweite
14
O
O
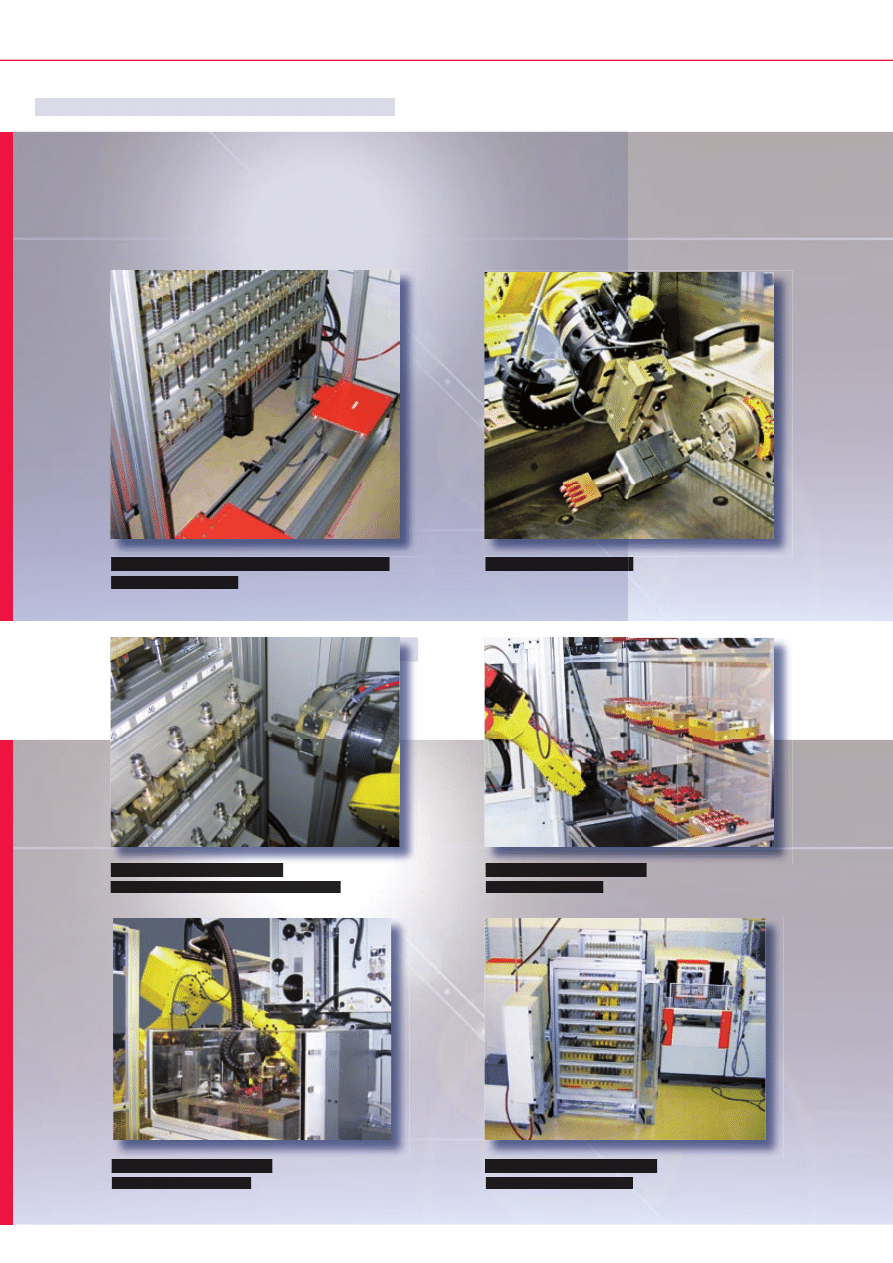
6-Achs-Roboter Anwendungsbeispiele
6-Achs-Roboter Anwendungsbeispiele
■
■
■
■
■
Starten der Bearbeitung
■
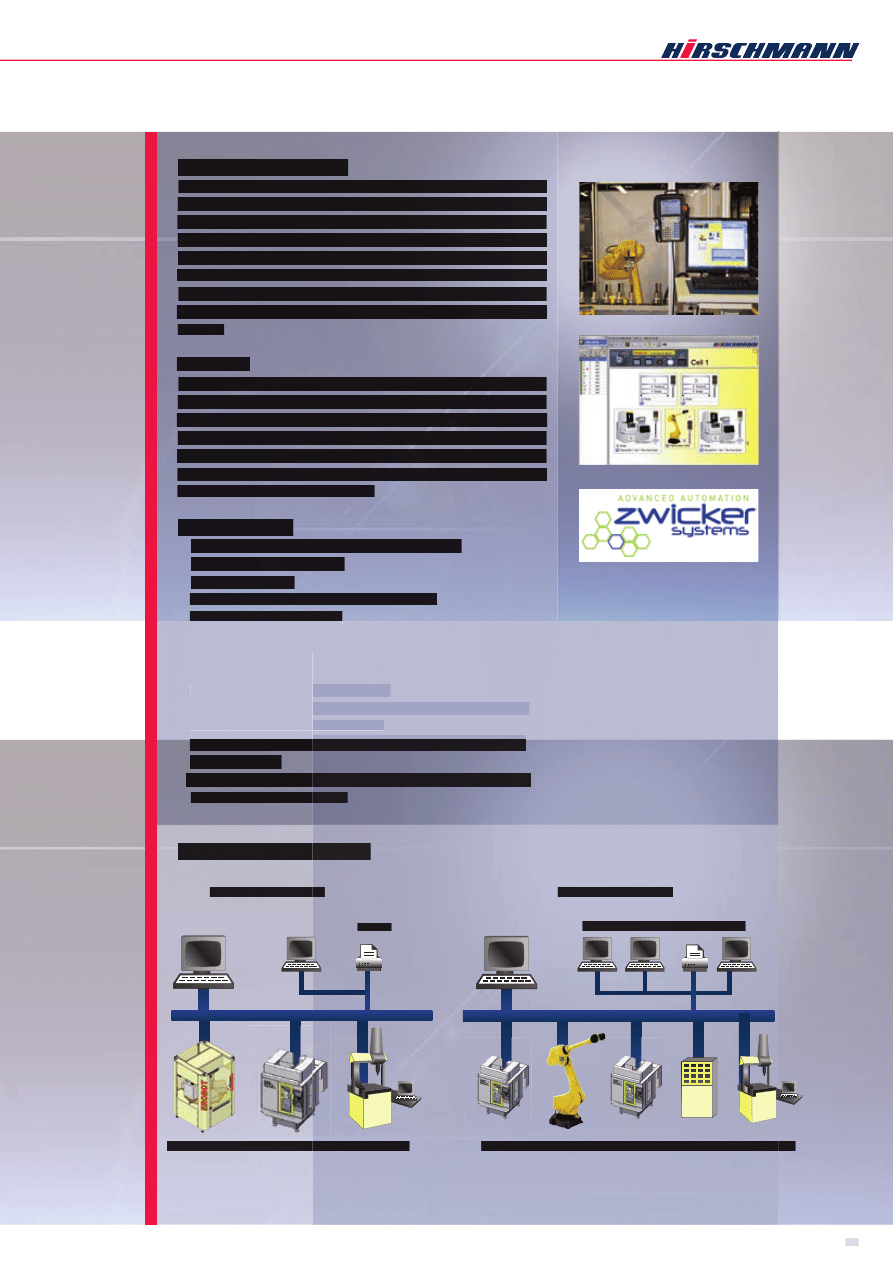
Grafi sche Anlagenvisualisierung
■
Effektive Nutzung und Auslastung der Produktionsma-
schinen im 24-Stundenbetrieb.
■
Automatische Steuerung und Überwachung des Ferti-
■
HIRSCHMANN
C
ell-
M
anagement-
S
oftware
CMS
und Zwicker Systems
Merkmale
N
15
15
N
Grafi sche Anlagenvisualisierung
Grafi sche Anlagenvisualisierung
Effektive Nutzung und Auslastung der Produktionsma-
Effektive Nutzung und Auslastung der Produktionsma-
schinen im 24-Stundenbetrieb.
schinen im 24-Stundenbetrieb.
Automatische Steuerung und Überwachung des Ferti-
Automatische Steuerung und Überwachung des Ferti-
CMS
CMS
16
FLEXIBLE AUTOMATIONSLÖSUNGEN
Für Werkzeugmaschinen
Vertretungen, Beratung und
Auslieferungslager in:
Australien
Belgien · Brasilien · Bulgarien
China · Dänemark
Finnland · Frankreich
Großbritannien
Hongkong
Indien · Indonesien · Israel
Italien · Japan
Kanada · Korea · Kroatien
Malaysia
Neuseeland · Niederlande · Norwegen
Österreich · Polen · Portugal
Singapur · Slowakei · Slowenien
Spanien · Schweden · Schweiz
Taiwan · Thailand
Tschechien · Türkei
Ungarn · USA
Gerne senden wir Ihnen Kataloge zu.
PRODUKTÜBERSICHT
Rostfreie Rundteiltische und A-Achsen
für Draht- und Senkerodiermaschinen
SPANNSYSTEM
4000
für Drahterodiermaschinen
SPANNSYSTEM
5000
für Senkerodiermaschinen
SPANNSYSTEM
9000
Modulares Nullpunkt-Spannsystem
SPANNSYSTEM
8000
für Werkzeugmaschinen
HIRSCHMANN GMBH · KIRCHENTANNENSTRASSE 9 · D-78737 FLUORN-WINZELN
FON +49 (0)7402 183-0 · FAX +49 (0)7402 18310 · www.hirschmanngmbh.com · info@hirschmanngmbh.com
Wyszukiwarka
Podobne podstrony:
FESTO Podstawy automatyzacji
Automatyka (wyk 3i4) Przel zawory reg
Automatyzacja w KiC (w 2) Obiekty reg
AutomatykaII 18
Automatyka wykład 8
Wybrane elementy automatyki instalacyjnej
12 Podstawy automatyki Układy sterowania logicznego
Automatyka dynamiakPAOo 2
Automatyka okrętowa – praca kontrolna 2
automatyczne swiatla
podstawy automatyki ćwiczenia lista nr 4b
AUTOMATYZACJA PROCESÓW SPAWALNICZYCH
Podstawy automatyki cz1
automatyka i robotyka 12 12 1
Automat do ład akumulatorów
Automatyka i sterowanie, Pomiary w energetyce
więcej podobnych podstron