
Rok akademicki: 2012/2013
Data wykonania ćwiczenia:
Grupa: 12A4
26.03.2013
Zespół: 2
Podstawy Robotyki
Temat ćwiczenia:
Pomiar drgań członu
roboczego manipulatora
Robot FANUC ARC MATE 100
Wykonali:
Mateusz Sito
Tomasz Siwek
Mateusz Żołądkiewicz

1. Cel ćwiczenia.
W ćwiczeniu zapoznaliśmy się ze sposobem pomiaru przyspieszenia za pomocą
akcelerometru, oraz jego budową. Do pomiarów używaliśmy czujnika VN-100.
2. Opis wybranego czujnika (AT4/100)
Zastosowanie:
Pomiar drgań wszelkich obiektów drgających
Ocena stanu dynamicznego maszyny
Ocena stanu łożysk
Opis techniczny:
Wykonany w oparciu o ceramikę PZT
Posiada wbudowany przedwzmacniacz napięciowy, który pozwala na
dwużyłowe połączenie czujnika z odbiornikiem sygnału będącym jednocześnie
jego źródłem zasilania.
Jest odporny na odwrotne podłączenie przewodów
Czujnik zamontowany jest w obudowie ze stali kwasoodpornej
Szczegółowe dane techniczne :
Czułość
100mV/g ± 10% przy +250C
Zakres przyspieszenia
80g warto
_
ci szczytowej
Nieliniowość char. Amplitudowej
1%
Częstotliwość rezonansowa
30kHz
Wpływ temperatury otoczenia
+ 5% w +120oC, -5% w -50 oC
Zakres temperatury otoczenia
–500C do +1200C
Wilgotność względna
95% bez kondensacji
Odporność na wibracje
500g peak
Odporność udary mechaniczne
5000g peak
Wpływ pola elektromagnetycznego
70μg/Gauss
Masa
62gram
Moment montażowy
3Nm
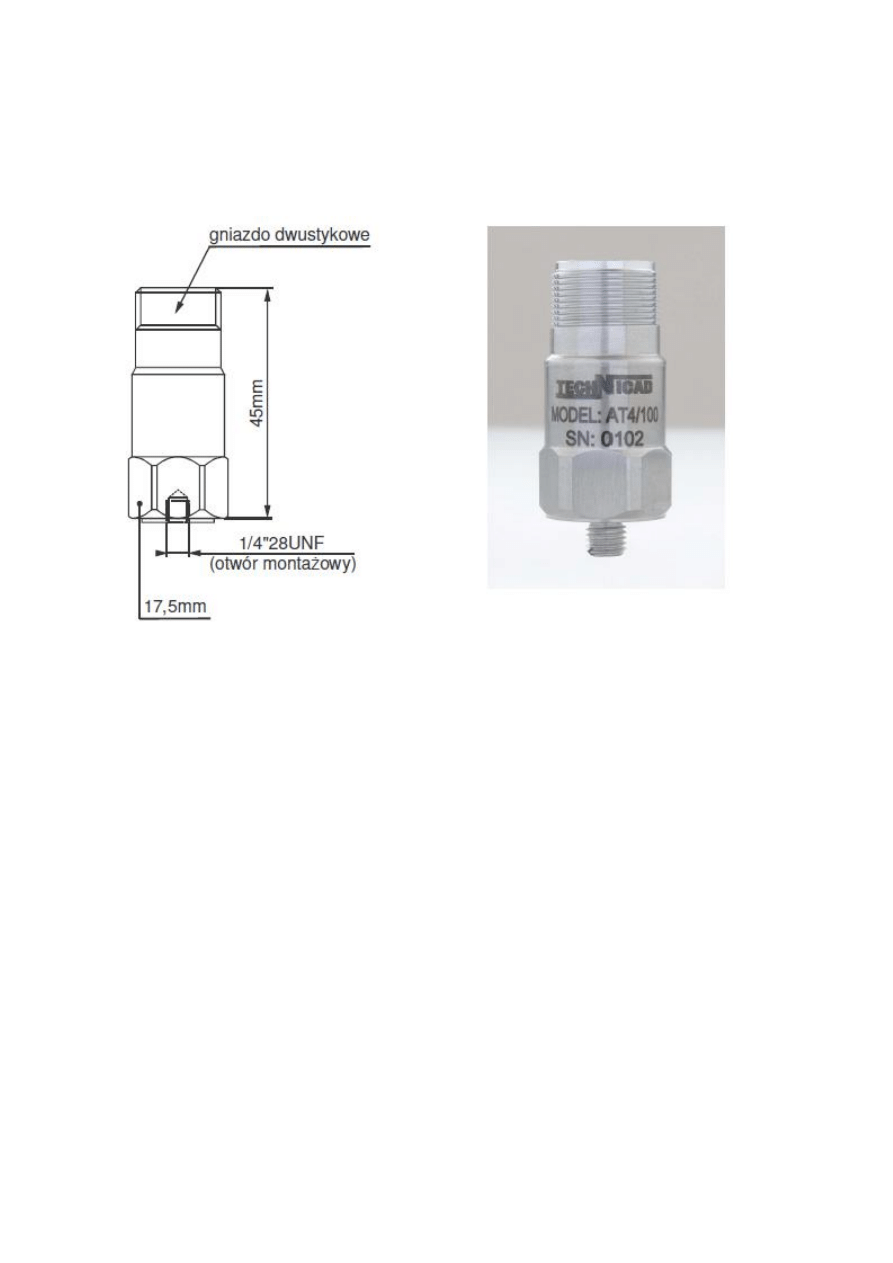
3. Wygląd czujnika:
4. Wykonanie ćwiczenia.
Ćwiczenie wykonane zostało dla następujących prędkości :
V
1
=%V
max
V
2
=%V
max
najazd:
35
85
x, y, z
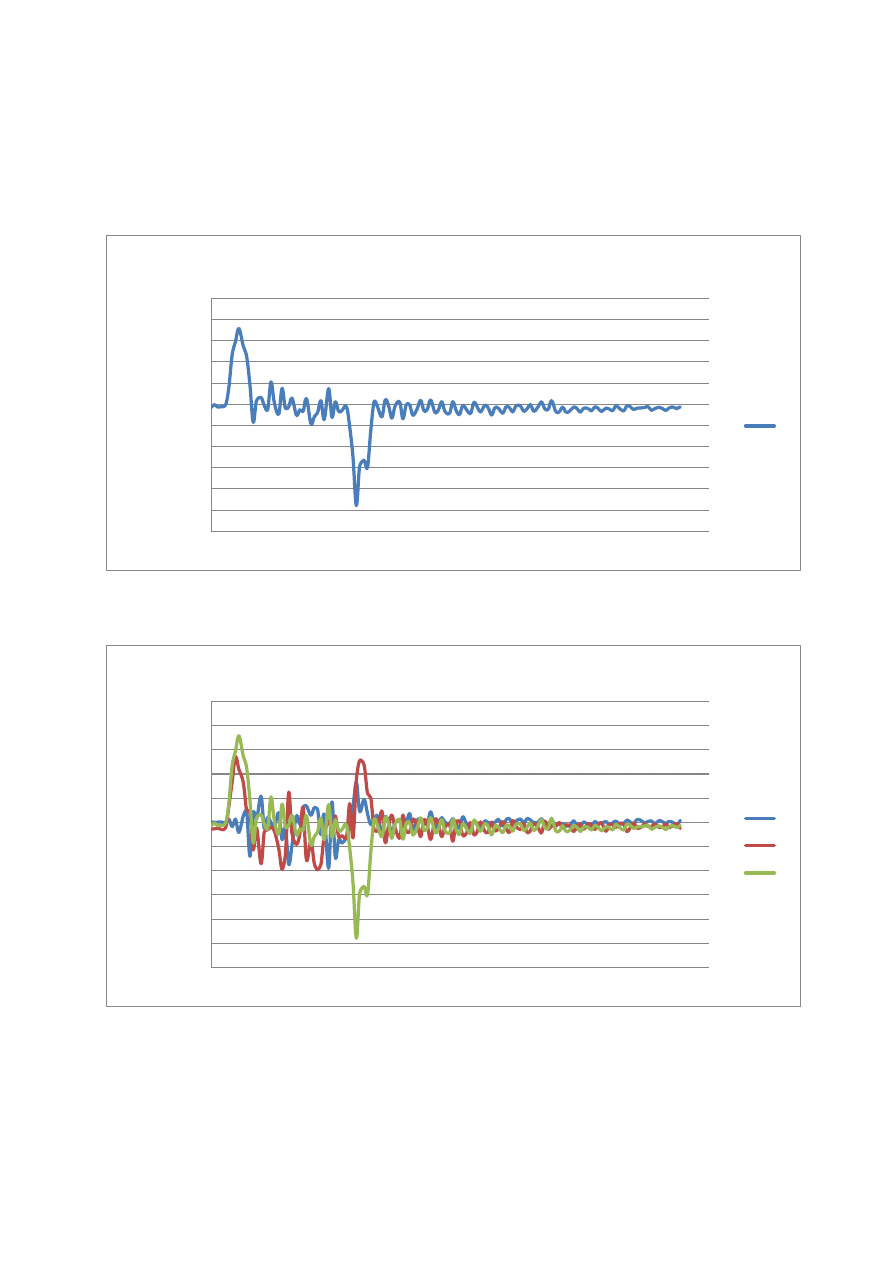
Wykresy dla V
1
:
Accel X
Accel X, Accel Y, Accel Z
-3,00
-2,50
-2,00
-1,50
-1,00
-0,50
0,00
0,50
1,00
1,50
2,00
2,50
0,00
1,00
2,00
3,00
4,00
5,00
6,00
7,00
a[m
/s
2
]
t[s]
Najazd wzdłuż osi X
X
-3,00
-2,50
-2,00
-1,50
-1,00
-0,50
0,00
0,50
1,00
1,50
2,00
2,50
0,00
1,00
2,00
3,00
4,00
5,00
6,00
7,00
a[m
/s
2
]
t[s]
Wykres zbiorczy dla najazdu wzdłuż osi X
Y
Z
X
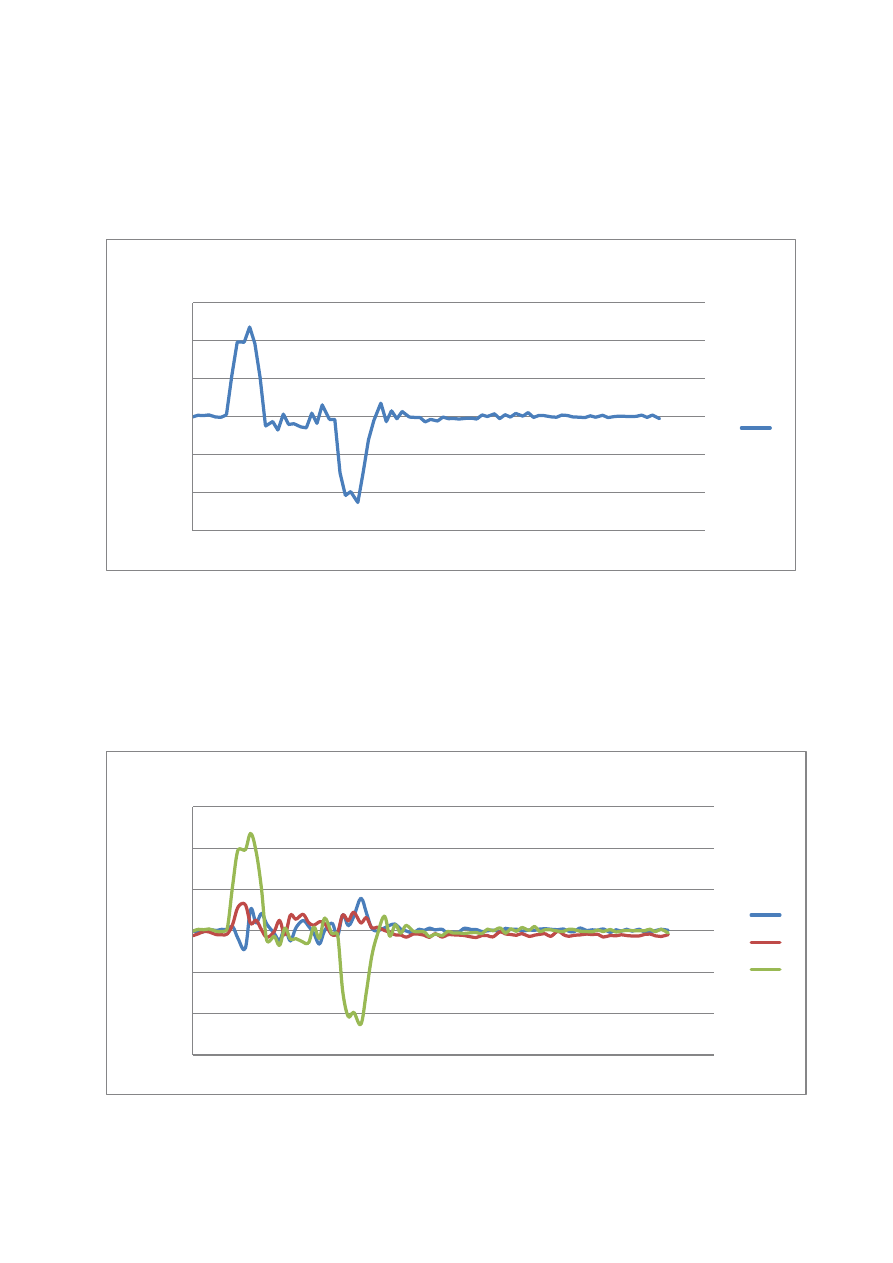
Accel Y
Accel X, Accel Y, Accel Z
-3,00
-2,00
-1,00
0,00
1,00
2,00
3,00
0,00
0,50
1,00
1,50
2,00
2,50
3,00
3,50
4,00
4,50
a[m
/s
2
]
t[s]
Najazd wzdłuż osi Y
Y
-3,00
-2,00
-1,00
0,00
1,00
2,00
3,00
0,00
0,50
1,00
1,50
2,00
2,50
3,00
3,50
4,00
4,50
a[m
/s
2
]
t[s]
Wykres zbiorczy dla najazdu wzdłuż osi Y
Z
X
Y
Accel Z
Accel X, Accel Y, Accel Z
-4,00
-3,00
-2,00
-1,00
0,00
1,00
2,00
3,00
4,00
0,00
1,00
2,00
3,00
4,00
5,00
6,00
a[m
/s
2
]
t[s]
Najazd wzdłuż osi Z
Z
-4,00
-3,00
-2,00
-1,00
0,00
1,00
2,00
3,00
4,00
0,00
1,00
2,00
3,00
4,00
5,00
6,00
a[m
/s
2
]
t[s]
Wykres zbiorczy dla najazdu wzdłuż osi Z
Z
Y
X
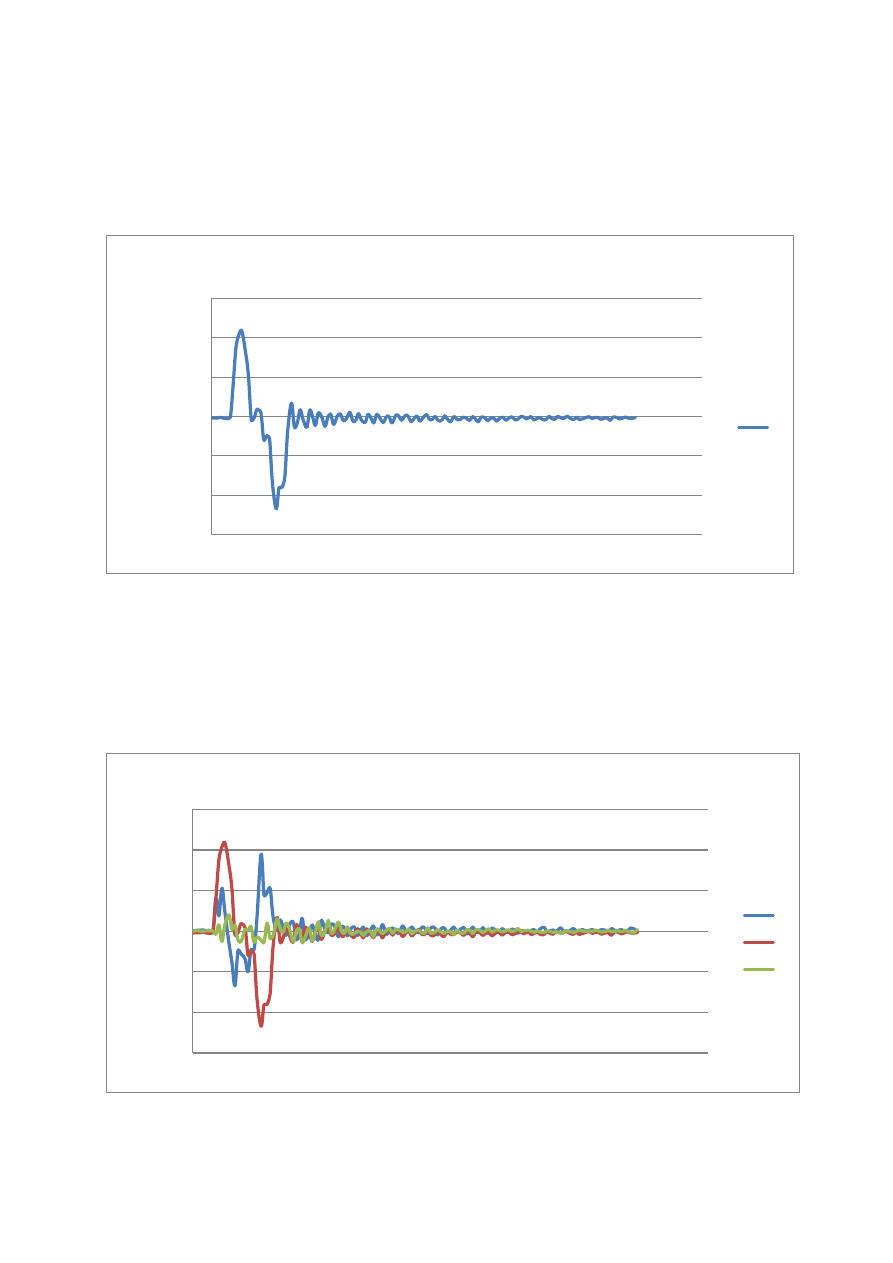
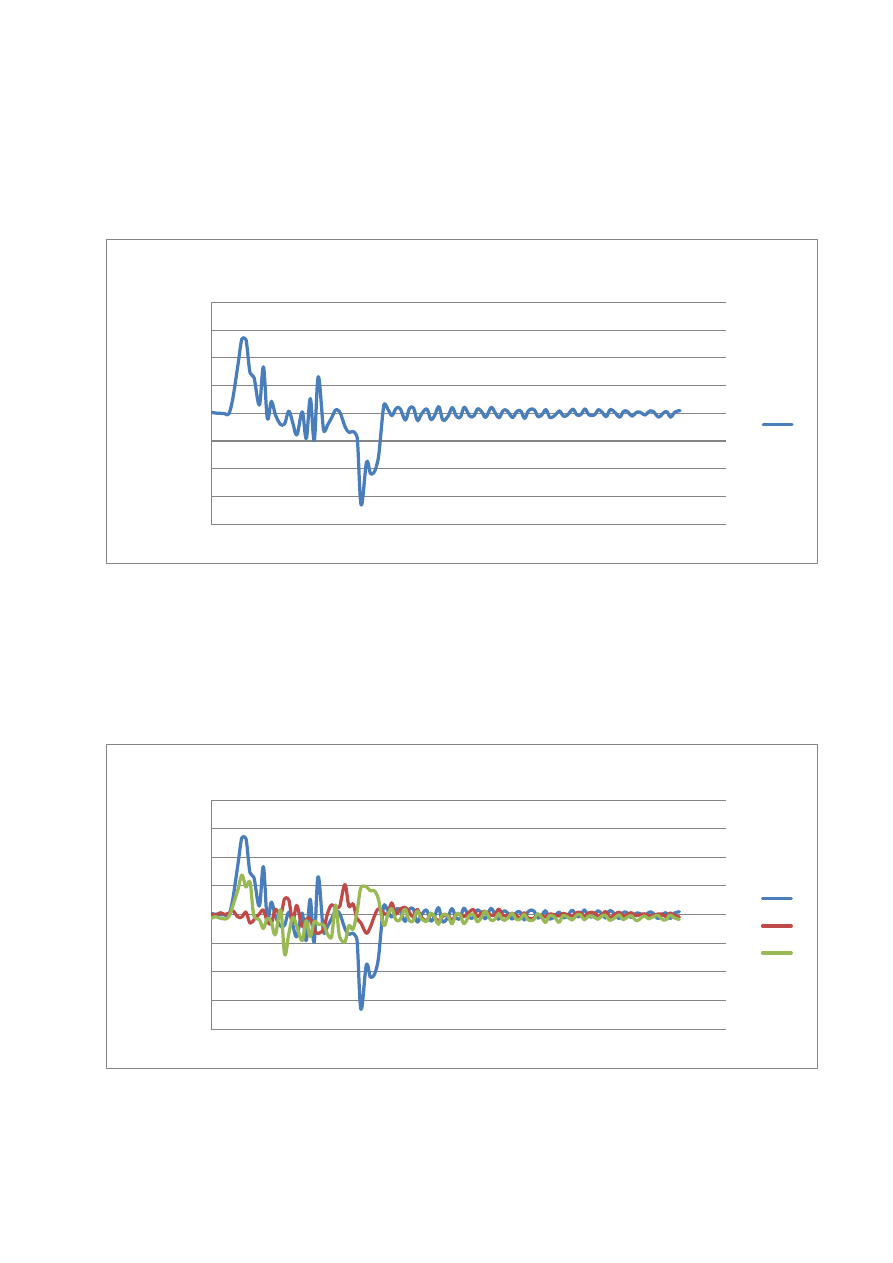
Wykresy dla V
2
Accel X
Accel X, Accel Y, Accel Z
-6,00
-4,00
-2,00
0,00
2,00
4,00
6,00
0,00
1,00
2,00
3,00
4,00
5,00
6,00
7,00
8,00
a[m
/s
2
]
t[s]
Najazad wzdłuż osi X
X
-6,00
-4,00
-2,00
0,00
2,00
4,00
6,00
0,00
1,00
2,00
3,00
4,00
5,00
6,00
7,00
8,00
a[m
/s
2
]
t[s]
Wykres zbiorczy dla najazdu wzdłuż osi X
Z
X
Y
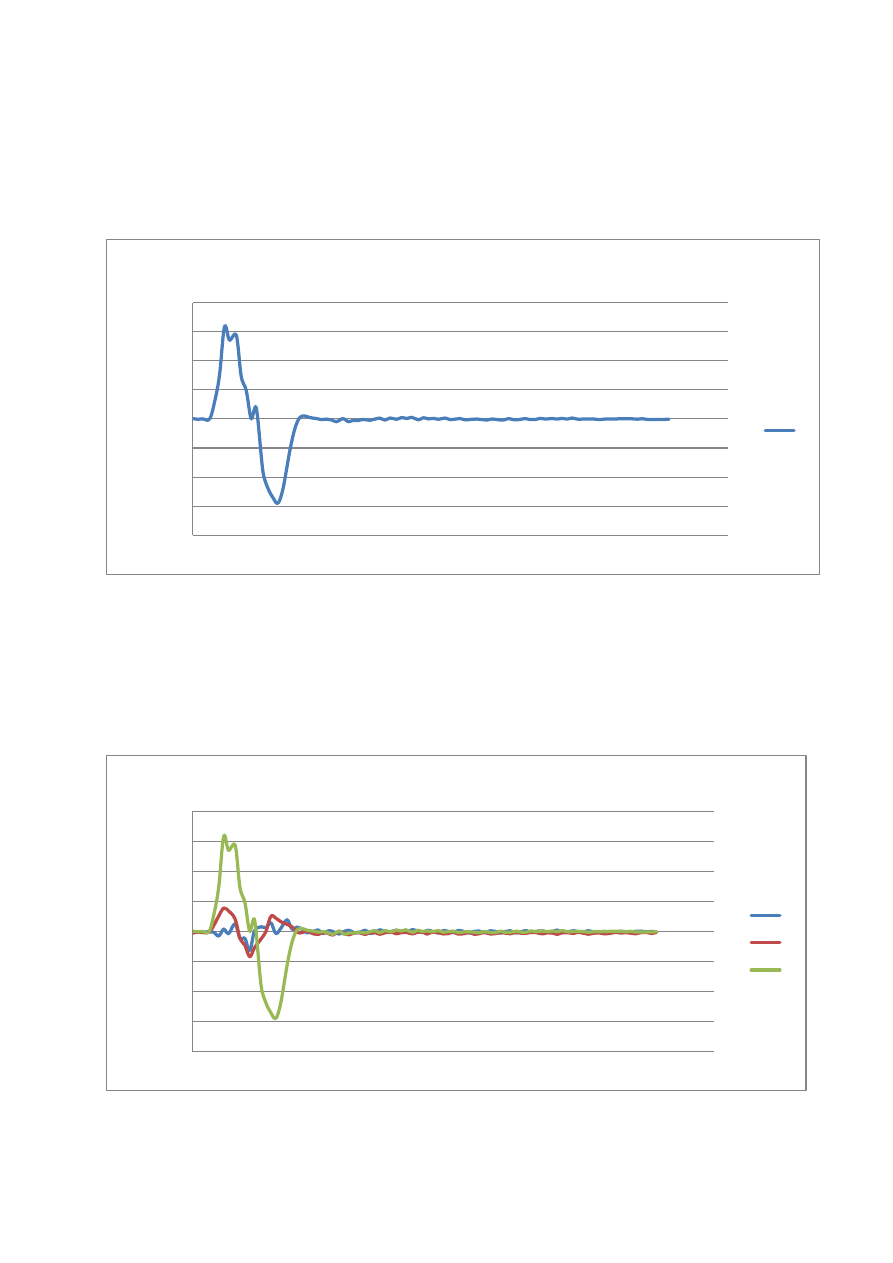
Accel Y
Accel X, Accel Y, Accel Z
-8,00
-6,00
-4,00
-2,00
0,00
2,00
4,00
6,00
8,00
0,00
0,50
1,00
1,50
2,00
2,50
3,00
3,50
4,00
4,50
5,00
a[m
/s
2
]
t[s]
Najazd wzdłuż osi Y
Y
-8,00
-6,00
-4,00
-2,00
0,00
2,00
4,00
6,00
8,00
0,00
0,50
1,00
1,50
2,00
2,50
3,00
3,50
4,00
4,50
5,00
a[m
/s
2
]
t[s]
Wykres zbiorczy dla najazdu wzdłuż osi Y
Z
X
Y
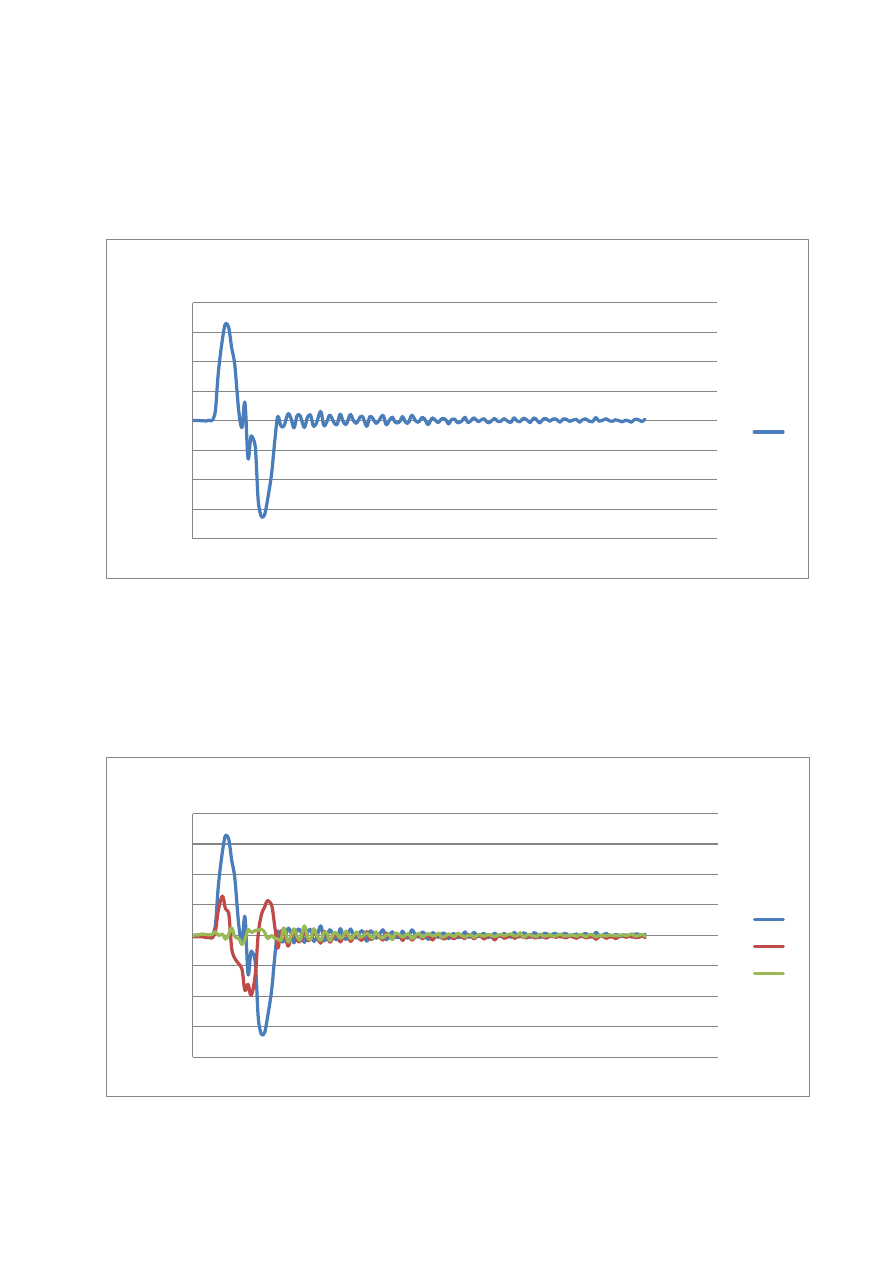
Accel Z
Accel X, Accel Y, Accel Z
-8,00
-6,00
-4,00
-2,00
0,00
2,00
4,00
6,00
8,00
0,00
1,00
2,00
3,00
4,00
5,00
6,00
7,00
8,00
a[m
/s
2
]
t[s]
Najazd wzdłuż osi Z
Z
-8,00
-6,00
-4,00
-2,00
0,00
2,00
4,00
6,00
8,00
0,00
1,00
2,00
3,00
4,00
5,00
6,00
7,00
8,00
a[m
/s
2
]
t[s]
Wykres zdiorczy dla najazdu wzdłuż osi Z
Z
X
Y

5. Wnioski.
Badane przez nas drgania mają wpływ na dokładność pracy manipulatora, dlatego ich pomiar
a następnie niwelacja (jeśli zachodzi taka potrzeba) jest ważną kwestią w pracy danego
manipulatora. Znając drgania jakie występują podczas ruchu członu roboczego możemy
dokonywać kalibracji istniejącej już jednostki jak i wprowadzać ulepszenia w fazie
projektowania nowych urządzeń.
Z powyższych wykresów odczytać możemy że:
Maksymalne wartości naprężeń i amplituda drgań zależą od prędkości członu roboczego ( im
wyższa prędkość tym wyższe obie wartości). Podczas ruchu tylko w jednym kierunku
występują również drgania w innych osiach które wynikać mogą z:
Nieprawidłowego montażu manipulatora
Drgań silnika napędowego
Luzów które mogą występować pomiędzy kolejnymi segmentami ramienia.
Aby niwelować drgania członu roboczego należy minimalizować luzy pomiędzy segmentami,
dbać o prawidłowe przymocowanie jednostki do podłoża, wykonywać pracę z możliwie małą
prędkością.
Wyszukiwarka
Podobne podstrony:
12A4& 03 2013 Żołądkiewicz
KPC Wykład (21) 26 03 2013
pediatria 26.03.2013, 6 rok WOJSKOWO-LEKARSKI cały rok wszystkie materiały, materiały 6 rok woj-lek,
Wykład 26 03 2013
FUNDUSZE EMERYTALNE 12 03 i 26 03 2013
ćwiczenia 4 (26 03 2013)
10 03 2013 Wid 10701 Nieznany
17 03 2013 Wid 17193 Nieznany
polonistyka raabe 2013 03 id 37 Nieznany
Cennik INTERIA PL 2013 03 21 id Nieznany
26 11 2013 Sapa Internet id 313 Nieznany (2)
26 03 2014 Linert id 31339 Nieznany (2)
24 03 2013 W id 30598 Nieznany
10 03 2013 Wid 10701 Nieznany
antropomotoryka 26 2004 id 6611 Nieznany (2)
MIKROBIOLOGIA JAMY USTNEJ, WYKŁAD 3, 28 03 2013
więcej podobnych podstron