
WPROWADZENIE
DO SZTUCZNEJ INTELIGENCJI
POLITECHNIKA WARSZAWSKA
WYDZIAŁ MECHANICZNY ENERGETYKI I LOTNICTWA
MEL
MEL
NS 586
Dr in
ż
. Franciszek Dul
© F.A. Dul 2007
15. WNIOSKOWANIE
PROBABILISTYCZNE
EWOLUCYJNE
EWOLUCYJNE
© F.A. Dul 2007
Wnioskowanie probabilistyczne ewolucyjne
Poka
ż
emy,
ż
e agent wnioskuj
ą
cy
probabilistycznie mo
ż
e mimo
niepewno
ś
ci zrozumie
ć
, co działo si
ę
w przeszło
ś
ci, wła
ś
ciwie zinterpretowa
ć
w przeszło
ś
ci, wła
ś
ciwie zinterpretowa
ć
tera
ź
niejszo
ść
, a nawet przewidzie
ć
przyszło
ść
.
© F.A. Dul 2007

• Niepewno
ść
i czas
• Wnioskowanie w modelach czasowych
• Ukryte modele Markowa
• Filtracja Kalmana
• Dynamiczne sieci Bayesa
•
Zastosowanie - Rozpoznawanie mowy
Plan rozdziału
© F.A. Dul 2007
15.1. Niepewno
ść
i czas
Ś
wiat jest niepewny i zmienia si
ę
w czasie.
Opis probabilistyczny zjawisk zmieniaj
ą
cych si
ę
w czasie
polega na wyznaczeniu w ka
ż
dej chwili czasu zmiennych
losowych, z których pewne s
ą
obserwowalne, a inne – nie:
• X
t
–
zmienne stanu
, nieobserwowane,
• E
t
–
zmienne obserwowanle
(evidence variables).
Zbiór warto
ś
ci
E
t
= e
t
w chwili
t
okre
ś
la zmienne obserwowalne.
Procesy stacjonarne
© F.A. Dul 2007
Procesy stacjonarne
Procesy stacjonarne
to takie, w których rozkłady g
ę
sto
ś
ci
prawdopodobie
ń
stwa zmiennych losowych
X
nie zmieniaj
ą
si
ę
wraz z czasem.
Parametry procesu stacjonarnego, takie jak warto
ść
ś
rednia
m
X
i wariancja
W
X
nie zale
żą
od czasu.
x(t)
t
m
X
= 0
W
X
= const
15.1. Niepewno
ść
i czas
Procesy Markowa
Zało
ż
enie Markowa
– stan bie
żą
cy zale
ż
y tylko od sko
ń
czonej
liczby stanów poprzednich.
Proces (ła
ń
cuch) Markowa
pierwszego rz
ę
du – taki w którym
stan bie
żą
cy zale
ż
y tylko od stanu poprzedniego i nie zale
ż
y
od innych stanów wcze
ś
niejszych.
Sie
ć
Bayesa dla procesu Markowa pierwszego rz
ę
du
X
t-1
X
t
X
t+1
X
t+2
X
t-2
© F.A. Dul 2007
)
|
(
)
|
(
1
1
:
0
−
−
=
∀
t
t
t
t
t
X
X
P
X
X
P
Ewolucja stanu w procesie Markowa jest opisana całkowicie
rozkładem warunkowym
P
(
X
t
|
X
t-1
), który jest nazywany
modelem przej
ś
cia
.
Sie
ć
Bayesa dla procesu Markowa drugiego rz
ę
du
X
t-1
X
t
X
t+1
X
t+2
X
t-2
Prawdopodobie
ń
stwo warunkowe dla ła
ń
cucha Markowa

15.1. Niepewno
ść
i czas
)
|
(
)
,
|
(
1
:
0
:
0
t
t
t
t
t
X
E
P
E
X
E
P
=
−
Rozkład warunkowy
P
(
E
t
|
X
t
) nazywany jest
modelem
czujników
lub
modelem obserwacji
.
Zało
ż
enie dla procesu Markowa: zmienne zaobserwowane
E
t
zale
żą
tylko od stanu bie
żą
cego
Rozkład ł
ą
czny prawdopodobie
ń
stwa zmiennych stanu
i obserwowalnych przy zało
ż
eniu,
ż
e proces jest procesem
Markowa pierwszego rz
ę
du
© F.A. Dul 2007
Markowa pierwszego rz
ę
du
∏
=
−
=
t
i
i
i
i
i
t
t
1
1
1
0
1
0
)
|
(
)
|
(
)
,...,
,
,
,...,
,
(
X
E
P
X
X
P
E
E
E
X
X
X
P
Proces Markowa pierwszego rz
ę
du jest jedynie przybli
ż
eniem
procesów rzeczywistych.
Lepsze przybli
ż
enia uzyskuje si
ę
stosuj
ą
c procesy Markowa
wy
ż
szych rz
ę
dów, ale ich analiza jest bardziej zło
ż
ona.
15.2. Wnioskowanie w modelach czasowych
Główne zadania wnioskowania probabilistycznego w czasie:
• Filtracja
(monitorowanie)
Wyznaczenie stanu wiarygodnego - rozkładu a posteriori
stanu bie
żą
cego
na podstawie wszystkich obserwacji
do chwili bie
żą
cej,
P
(
X
t
|
e
1:t
).
• Predykcja
(prognozowanie)
Wyznaczenie rozkładu a posteriori
stanu przyszłego
na podstawie wszystkich obserwacji do chwili bie
żą
cej,
© F.A. Dul 2007
na podstawie wszystkich obserwacji do chwili bie
żą
cej,
P
(
X
t+k
|
e
1:t
),
k > 0
.
• Wygładzanie
Wyznaczenie rozkładu a posteriori
stanu przeszłego
na podstawie wszystkich obserwacji do chwili bie
żą
cej,
P
(
X
k
|
e
1:t
),
1
≤
k < t
.
• Najbardziej wiarygodne wyja
ś
nienie
Wyznaczenie stanów najbardziej wiarygodne generuj
ą
cych
dane obserwacje,
.
)
|
(
max
arg
:
1
:
1
:
1
t
t
t
e
x
P
x

15.2. Wnioskowanie w modelach czasowych
Filtracja
Je
ż
eli znane s
ą
wyniki filtracji do chwili
t - 1,
to rozkład
prawdopodobie
ń
stwa zmiennej
X
t
mo
ż
na wyznaczy
ć
na podstawie obserwacji
e
t
, za pomoc
ą
estymacji
∑
−
−
−
−
=
1
)
|
(
)
|
(
)
|
(
)
|
(
1
:
1
1
1
:
1
t
t
t
t
t
t
t
t
t
P
x
e
x
x
X
P
X
e
P
e
X
P
α
Funkcja
f
1:t
=
P
(
X
t
|
e
1:t
) opisuje propagacj
ę
informacji –
„wiadomo
ść
” – wzdłu
ż
ci
ą
gu zmiennych stanu i obserwacji.
© F.A. Dul 2007
)
|
(
1
:
1
:
1
t
t
t
e
f
f
−
=
Forward
α
„wiadomo
ść
” – wzdłu
ż
ci
ą
gu zmiennych stanu i obserwacji.
Rozkład prawdopodobie
ń
stwa zmiennej stanu przy danych
obserwacjach mo
ż
na zapisa
ć
w postaci rekurencyjnej

15.2. Wnioskowanie w modelach czasowych
Predykcja
Predykcja mo
ż
e by
ć
uwa
ż
ana za filtracj
ę
w której pomini
ę
to
k ostatnich obserwacji,
e
t-k:t.
Rozkłady prawdopodobie
ń
stw zmiennych
X
t+k+1
mo
ż
na
wyznaczy
ć
na podstawie obserwacji
e
t
, za pomoc
ą
estymacji
∑
+
+
+
+
+
+
+
=
k
t
t
k
t
k
t
k
t
t
k
t
P
x
e
x
x
X
P
e
X
P
)
|
(
)
|
(
)
|
(
:
1
1
:
1
1
Wiarygodno
ść
© F.A. Dul 2007
∑
=
=
t
t
t
t
t
P
L
x
x
e
)
(
)
(
:
1
:
1
:
1
l
Wiarygodno
ść
Wiarygodno
ść
ci
ą
gu obserwacji
P(e
1:t
)
jest wielko
ś
ci
ą
u
ż
yteczn
ą
w wielu zastosowaniach.
Funkcja
ℓ
l
1:t
=
P
(
X
t
,
e
1:t
) opisuj
ą
ca „wiadomo
ść
” – propagacj
ę
wiarygodno
ś
ci mo
ż
e by
ć
przedstawione w postaci
rekurencyjnej
)
|
(
1
:
1
1
:
1
+
+
=
t
t
t
e
l
l
Forward
α
Wiarygodno
ść
wyra
ż
a si
ę
wzorem
15.2. Wnioskowanie w modelach czasowych
Wygładzanie
Wygładzanie polega na wyznaczeniu rozkładu a posteriori
stanów przeszłych
1
≤
k < t
na podstawie wszystkich
obserwacji do chwili bie
żą
cej,
P
(
X
k
|
e
1:t
),.
X
1
X
k
X
t
X
0
E
1
E
k
E
t
. . .
. . .
© F.A. Dul 2007
t
k
k
t
k
:
1
:
1
:
1
)
|
(
+
=
b
f
e
X
P
α
1
b
e
b
b
=
=
+
+
+
+
t
t
t
k
t
k
t
k
:
1
:
1
:
2
:
1
,
)
,
(
Backward
oraz
wstecz
, od k+1 do t
Rozkłady prawdopodobie
ń
stw wygładzanych zmiennych
X
k
dane s
ą
wzorem rekurencyjnym
Wygładzanie przebiega w dwu etapach:
w przód
od 1 do k
)
|
(
1
:
1
:
1
k
k
k
e
f
f
−
=
Forward

15.2. Wnioskowanie w modelach czasowych
Najbardziej wiarygodne wyja
ś
nienie
Rozkłady prawdopodobie
ń
stw kolejnych obserwacji pozwalaj
ą
wyznaczy
ć
wiarygodno
ść
kolejnych stanów.
Jednak wiarygodno
ść
ci
ą
gu stanów nie jest równa wiarygod-
no
ś
ci stanów oddzielnych, gdy
ż
s
ą
one na ogół zale
ż
ne.
Wiarygodno
ść
ci
ą
gu stanów polega na wyznaczeniu ł
ą
cznego
rozkładu prawdopodobie
ń
stwa dla wszystkich chwil
k = 1,...,t
.
Istnieje zale
ż
no
ść
rekurencyjna pomi
ę
dzy najbardziej
wiarygodnymi
ś
cie
ż
kami do stanów
x
t+1
i
x
t
© F.A. Dul 2007
)
)
|
,
...
(
max
)
|
(
(
max
)
|
(
:
1
1
1
...
1
1
1
1
1
t
t
t
t
t
t
t
P
t
t
e
x
x
x
x
X
P
X
e
P
x
x
x
−
+
+
+
−
=
α
Zale
ż
no
ść
ta jest identyczna z zale
ż
no
ś
ci
ą
dla filtracji
po zast
ą
pieniu funkcji
f
1:t
=
P
(
X
t
|
e
1:t
) funkcja
Wyznaczenie najbardziej wiarygodnego ci
ą
gu stanów przy
pomocy
algorytmu Viterbiego
przebiega tak, jak przy filtracji.
wiarygodnymi
ś
cie
ż
kami do stanów
x
t+1
i
x
t
=
+
+
)
|
,
...
(
max
1
:
1
1
1
...
1
t
t
t
t
e
X
x
x
P
x
x
)
|
,
...
(
max
:
1
1
1
...
:
1
1
1
t
t
t
t
t
e
X
x
x
P
m
x
x
−
−
=
Przykład
Stra
ż
nik tajnych instalacji ukrytych pod ziemi
ą
mo
ż
e
wnioskowa
ć
o pogodzie wył
ą
cznie na podstawie obserwacji
czy szef przychodzi rano z parasolem, czy te
ż
bez.
Dla ka
ż
dego dnia
t
zbiór zmiennych obserwowalnych
E
t
zawiera jedn
ą
zmienn
ą
U
t
okre
ś
laj
ą
c
ą
obserwacj
ę
parasola,
za
ś
zbiór zmiennych stanu
X
t
zawiera jedn
ą
zmienn
ą
R
t
okre
ś
laj
ą
c
ą
, czy pada deszcz.
15.2. Wnioskowanie w modelach czasowych
Sie
ć
Bayesa oraz rozkład prawdopodobie
ń
stw warunkowych
© F.A. Dul 2007
Deszcz
t
Deszcz
t+1
Deszcz
t-1
R
t
P(U
t
)
t
f
0.90
0.20
Parasol
t
Parasol
t+1
Parasol
t-1
R
t-1
P(U
t
)
t
f
0.70
0.30
Sie
ć
Bayesa oraz rozkład prawdopodobie
ń
stw warunkowych

15.3. Ukryte modele Markowa
Ukryte modele Markowa
(Hidden Markov Models, HMM)
s
ą
to modele probabilistyczne w których stan procesu opisuje
pojedy
ń
cza
dyskretna zmienna losowa
X
t
.
Ukryty model Markowa posiada proste reprezentacje modeli
przej
ś
cia, obserwacji oraz funkcji propagacji informacji.
Je
ż
eli zmienna stanu
X
t
ma S warto
ś
ci, to model przej
ś
cia
T = P
(
X
t
|
X
t 1
) ma posta
ć
macierzy S
×
S której elementy
)
|
(
1
i
X
j
X
P
t
t
ij
=
=
=
−
T
© F.A. Dul 2007
1
t
t
ij
−
opisuj
ą
prawdopodobie
ń
stwo przej
ś
cia ze stanu i do stanu j.
Model obserwacji ma posta
ć
macierzy diagonalnej
O
t
której
elementy s
ą
równe
)
|
(
i
X
e
P
t
t
ii
=
=
O
Funkcje propagacji informacji w przód i wstecz maj
ą
postacie
wektorów
,
:
1
1
1
:
1
t
T
t
t
f
T
O
f
+
+
=
α
t
k
k
t
k
:
2
2
:
1
+
+
+
=
b
O
T
b
Ukryte modele Markowa umo
ż
liwiaj
ą
zbudowanie efektywnych
algorytmów filtracji i wygładzania, w tym równie
ż
on-line.
15.4. Filtracja Kalmana
W technice cz
ę
sto spotyka si
ę
zagadnienia dynamiczne
obarczone niepewno
ś
ci
ą
modelu lub obserwacji, np:
– wyznaczanie trajektorii ciał niebieskich
na podstawie niedokładnych obserwacji;
–
ś
ledzenie ruchu obiektów przy silnie
zakłóconych obserwacjach;
– nawigacja pojazdami
Program “Apollo” - lot na Ksi
ęż
yc!
Rudolph E. Kalman
© F.A. Dul 2007
S
ą
to problemy estymacji stanu obiektów (poło
ż
enia i pr
ę
dko-
ś
ci) na podstawie zakłóconych (zaszumionch) obserwacji.
Do analizy takich dynamicznych zagadnie
ń
stochastycznych
u
ż
ywa si
ę
powszechnie
filtracji Kalmana
.
Filtracja Kalmana jest to wnioskowanie w probabilistycznym
modelu dynamicznym zło
ż
onym z losowego modelu zjawiska
fizycznego i losowego modelu obserwacji (pomiarów).
Filtracja Kalmana jest szczególnie przydatna w mechanice.

15.4. Filtracja Kalmana
Idea filtracji Kalmana
Filtracja Kalmana ma na celu oszacowanie przyszłego stanu
układu x(t
)
na podstawie modelu układu, znanego stanu
poprzedniego x(t–
∆
t
)
oraz aktualnej obserwacji z(t
)
.
Filtracja Kalmana ma posta
ć
liniowej kombinacji wa
ż
onej:
• predykcji stanu x(t
)
na podstawie (zaszumionego) modelu
i stanu poprzedniego x(t–
∆
t
)
,
• niepewnej (zaszumionej) obserwacji z(t),
)
(
)
(
~
)
(
t
a
t
t
a
t
z
x
x
+
∆
−
© F.A. Dul 2007
• Je
ż
eli obserwacje s
ą
niepewne (du
ż
e warto
ś
ci wariancji
obserwacji), to estymacja stanu przyszłego zawiera
wi
ę
cej stanu, a
x
> a
z
.
• Je
ż
eli predykcja stanu jest bardziej niepewna (du
ż
e
warto
ś
ci wariancji zmiennej stanu), to estymacja stanu
przyszłego zawiera wi
ę
cej obserwacji, a
z
> a
x
;
Filtracja Kalmana pozwala ponadto wyznaczy
ć
wariancje
zmiennych stanu i obserwacji.
)
(
)
(
~
)
(
t
a
t
t
a
t
z
x
z
x
x
+
∆
−
15.4. Filtracja Kalmana
,
)
(
)
(
t
t
t
∆
−
=
x
F
x
Rozkład prawdopodobie
ń
stwa warunkowego dla stanu
w chwili t jest równy
]
))
(
)
((
exp[
)
)(
,
(
1
2
1
µ
x
Q
µ
x
x
Q
µ
−
−
−
=
−
T
N
α
µµµµ
- wektor warto
ś
ci
ś
rednich, Q - macierz kowariancji białego szumu.
Filtracja Kalmana opiera si
ę
na dwóch zało
ż
eniach:
• model obiektu jest liniowy,
• zakłócenia modelu i pomiarów maj
ą
rozkład normalny,
© F.A. Dul 2007
Liniowo
ść
modelu gwarantuje,
ż
e estymacje stanu w kolejnych
chwilach czasu maj
ą
rozkład
normalny.
)
(
)
),
(
(
)
)
(
)
(
|
)
(
)
(
(
t
t
t
N
t
t
t
t
t
t
P
x
Fx
x
X
x
X
σ
∆
−
=
∆
−
=
∆
−
=
w chwili t jest równy
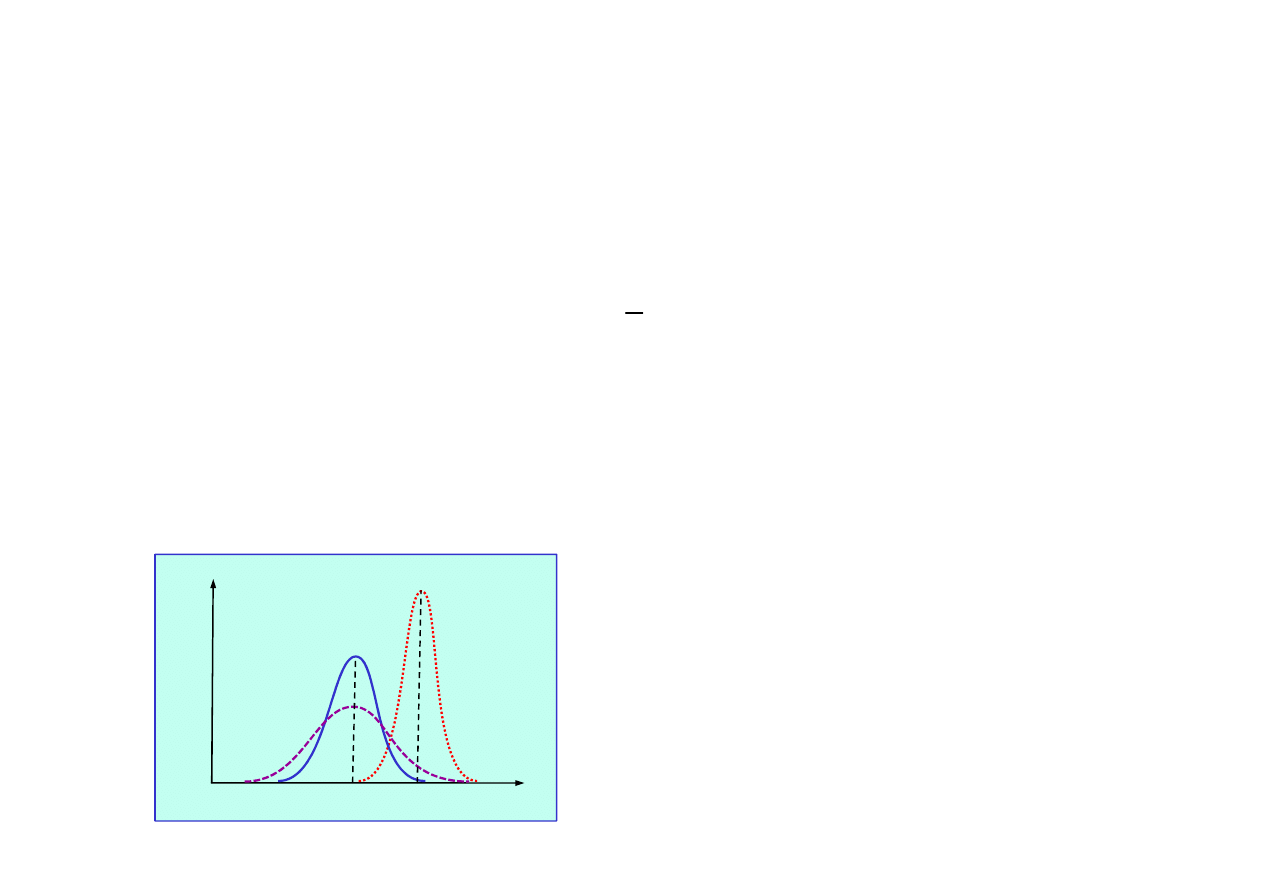
Kolejne predykcje stanu s
ą
spłaszczane przez szumy
pomiarów i modelu.
P(x
0
|z
1
=2,5)
P(x
0
)
P(x
1
)
-5 -2.5 0 2.5 x
5.0
0
0
.2
0
.4
0
.6
P
(x
)
15.4. Filtracja Kalmana
Sie
ć
Bayesa dla filtru Kalmana
Cz
ęść
widoczna:
B
)
(t
U
Cz
ęść
ukryta:
)
(
t
t
∆
−
X
)
(t
X
F
H
)
(t
Z
t -
∆
t
(k – 1)
t +
∆
t
(k+1)
t
(k)
)
(
t
R
w
)
(
t
t
∆
−
Z
H
• obserwacje Z(t),
• sterowanie U(t).
• stan X(t),
• zakłócenia
© F.A. Dul 2007
Modele układu i obserwacji maj
ą
posta
ć
)
(
)
(
)
(
t
t
t
t
Q
n
Fx
x
+
∆
−
=
)
(
)
(
)
(
t
t
t
R
w
Hx
z
+
=
+ Bu(t)
)
(
t
t
∆
−
X
)
(t
X
)
(
t
Q
n
F
)
(t
X
&
)
(
t
t
∆
−
X
&
• zakłócenia
stanu n(Q
t
),
• zakłócenia
obserwacji w(R
t
).
15.4. Filtracja Kalmana
Dla filtracja Kalmana ze stałym krokiem czasowym
t
k
t
k
∆
=
)
(
k
k
k
R
w
Hx
z
+
=
Zakłócenia stanu i pomiarów s
ą
opisane rozkładami
normalnymi Gaussa
1
x
Q
x
x
Q
0
Q
n
−
−
=
=
T
α
modele układu i obserwacji maj
ą
posta
ć
k
k
k
k
Bu
Q
n
Fx
x
+
+
=
−
)
(
1
© F.A. Dul 2007
k
k |
ˆx
Filtr Kalmana u
ż
ywa nast
ę
puj
ą
cych zmiennych roboczych:
- estymacja stanu w chwili k.
k
k |
P
- estymacja macierzy kowariancji bł
ę
du stanu,
]
)
(
exp[
)
)(
,
(
)
(
1
2
1
x
Q
x
x
Q
0
Q
n
−
−
=
=
k
T
n
k
k
N
α
]
)
(
exp[
)
)(
,
(
)
(
1
2
1
x
R
x
x
R
0
R
w
−
−
=
=
k
T
w
k
k
N
α
k
k|
S
- estymacja macierzy kowariancji bł
ę
du pomiaru,
k
K
- macierz wzmocnienia optymalnego.
15.4. Filtracja Kalmana
Filtr Kalmana wyznacza estymacje stanu minimalizuj
ą
ce
warto
ść
oczekiwan
ą
E kwadratu bł
ę
du
min
]
)
ˆ
[(
2
|
→
−
k
k
k
E
x
x
Jest to równowa
ż
ne minimalizacji
ś
ladu macierzy kowariancji
bł
ę
du P
k|k
wzgl
ę
dem macierzy wzmocnienia optymalnego K
k
0
2
)
(
2
)
(
tr
1
|
|
=
+
−
=
∂
∂
−
k
k
T
k
k
k
k
k
S
K
P
H
P
1
1
|
−
−
=
k
T
k
k
k
k
S
H
P
K
T
k
k
k
T
k
T
k
k
k
k
k
k
k
k
k
k
k
K
S
K
K
H
P
P
H
K
P
P
+
−
−
=
−
−
−
1
|
1
|
1
|
|
© F.A. Dul 2007
0
2
)
(
2
1
|
=
+
−
=
∂
−
k
k
k
k
k
k
S
K
P
H
K
1
|
−
=
k
k
k
k
k
S
H
P
K
Własno
ś
ci estymat otrzymanych za pomoc
ą
filtru Kalmana
0
]
ˆ
[
]
ˆ
[
1
|
|
=
−
=
−
−
k
k
k
k
k
k
E
E
x
x
x
x
0
]
[
=
k
E e
)
ˆ
cov(
|
|
k
k
k
k
k
x
x
P
−
=
)
ˆ
cov(
1
|
1
|
−
−
−
=
k
k
k
k
k
x
x
P
)
cov(
k
k
e
S
=

15.4. Filtracja Kalmana
k
T
k
k
k
k
k
k
Q
F
P
F
P
+
=
−
−
−
1
|
1
1
|
k
k
k
k
k
k
k
u
B
x
F
x
+
=
−
−
−
1
|
1
1
|
ˆ
ˆ
(predykcja stanu)
(predykcja macierzy kowariancji)
Filtracja Kalmana składa si
ę
z dwóch faz:
• predykcji
, która polega na wyznaczeniu estymat stanu
i macierzy kowariancji bł
ę
du na podstawie ich warto
ś
ci
w chwili poprzedniej.
• aktualizacji
, w której wykorzystuje si
ę
pomiary w chwili
bie
żą
cej do poprawienia estymat uzyskanych w predykcji
© F.A. Dul 2007
k
T
k
k
k
k
k
R
H
P
H
S
+
=
−
1
|
1
|
ˆ
−
−
=
k
k
k
k
k
x
H
z
e
1
|
|
)
(
−
−
=
k
k
k
k
k
k
P
H
K
I
P
k
k
k
k
k
k
e
K
x
x
+
=
−
1
|
|
ˆ
ˆ
(aktualizacja bł
ę
du pomiaru)
(aktualizacja kowariancji bł
ę
du pomiaru)
(aktualizacja estymacji stanu)
(aktualizacja kowariancji bł
ę
du stanu)
1
1
|
−
−
=
k
T
k
k
k
k
S
H
P
K
(macierz wzmocnienia optymalnego)
bie
żą
cej do poprawienia estymat uzyskanych w predykcji
w celu otrzymania dokładniejszych warto
ś
ci stanu
i macierzy kowariancji bł
ę
du.
15.4. Filtracja Kalmana
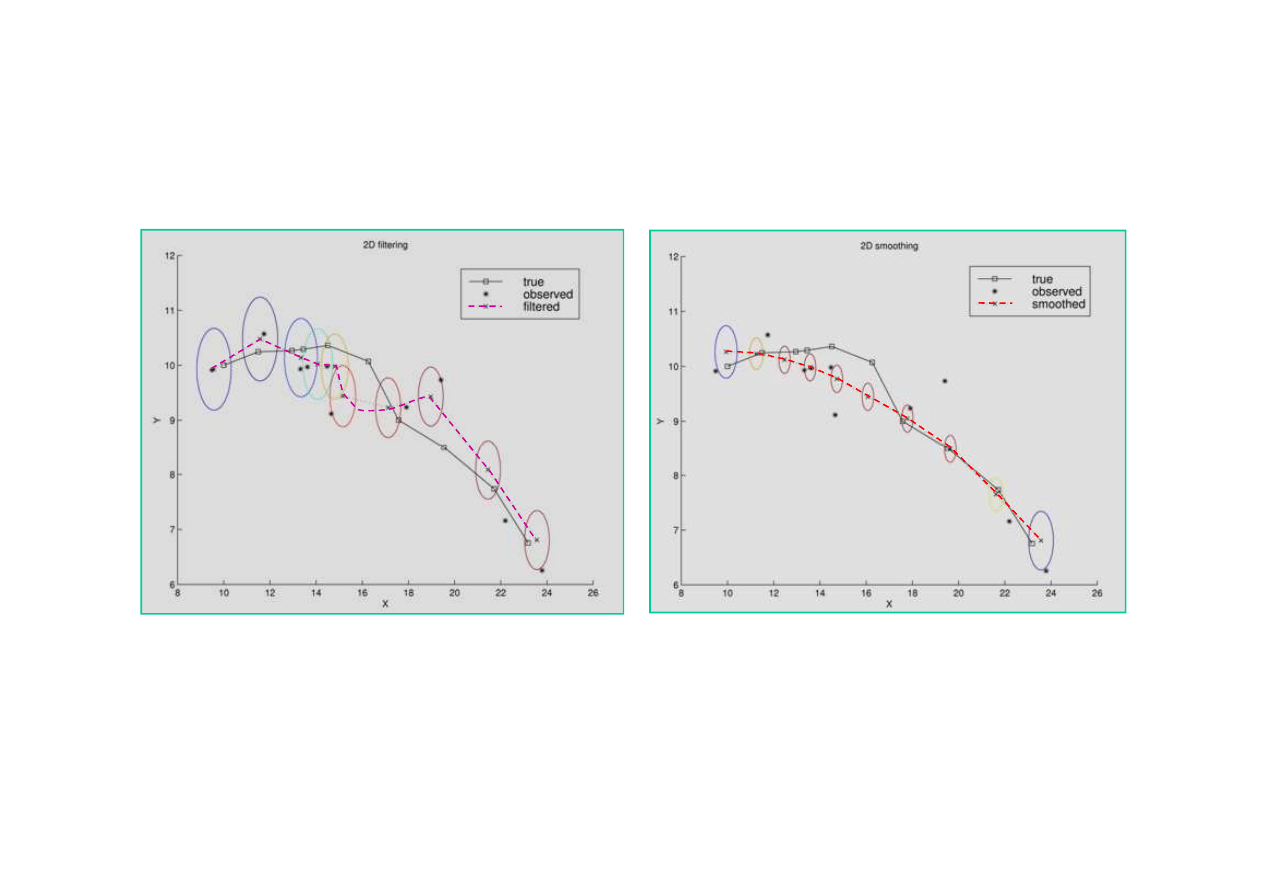
Przykład
Zastosowanie filtracji Kalmana do
ś
ledzenia ruchu obiektu
w płaszczy
ź
nie X-Y. Stan obiektu - X(t) = [ X, Y, V
X
,V
Y
]
T
.
© F.A. Dul 2007
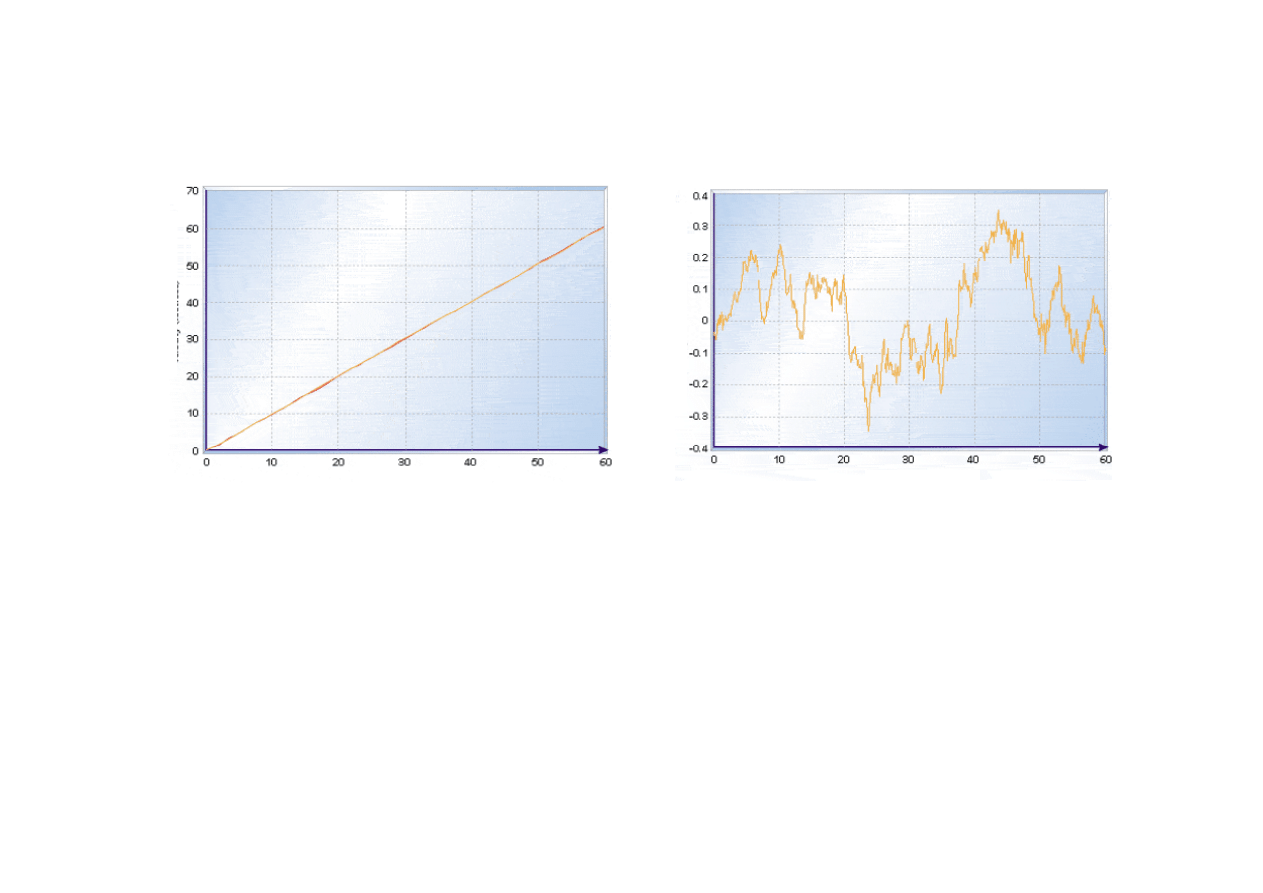
Wygładzanie
Filtracja
Filtracja Kalmana zapewnia
poprawne
ś
ledzenie ruchu.
Wariancja bł
ę
dów pomiaru
szybko si
ę
stabilizuje.
Filtracja Kalmana zapewnia
wygładzenie toru i znaczn
ą
redukcj
ę
wariancji bł
ę
dów
pomiaru.
15.4. Filtracja Kalmana
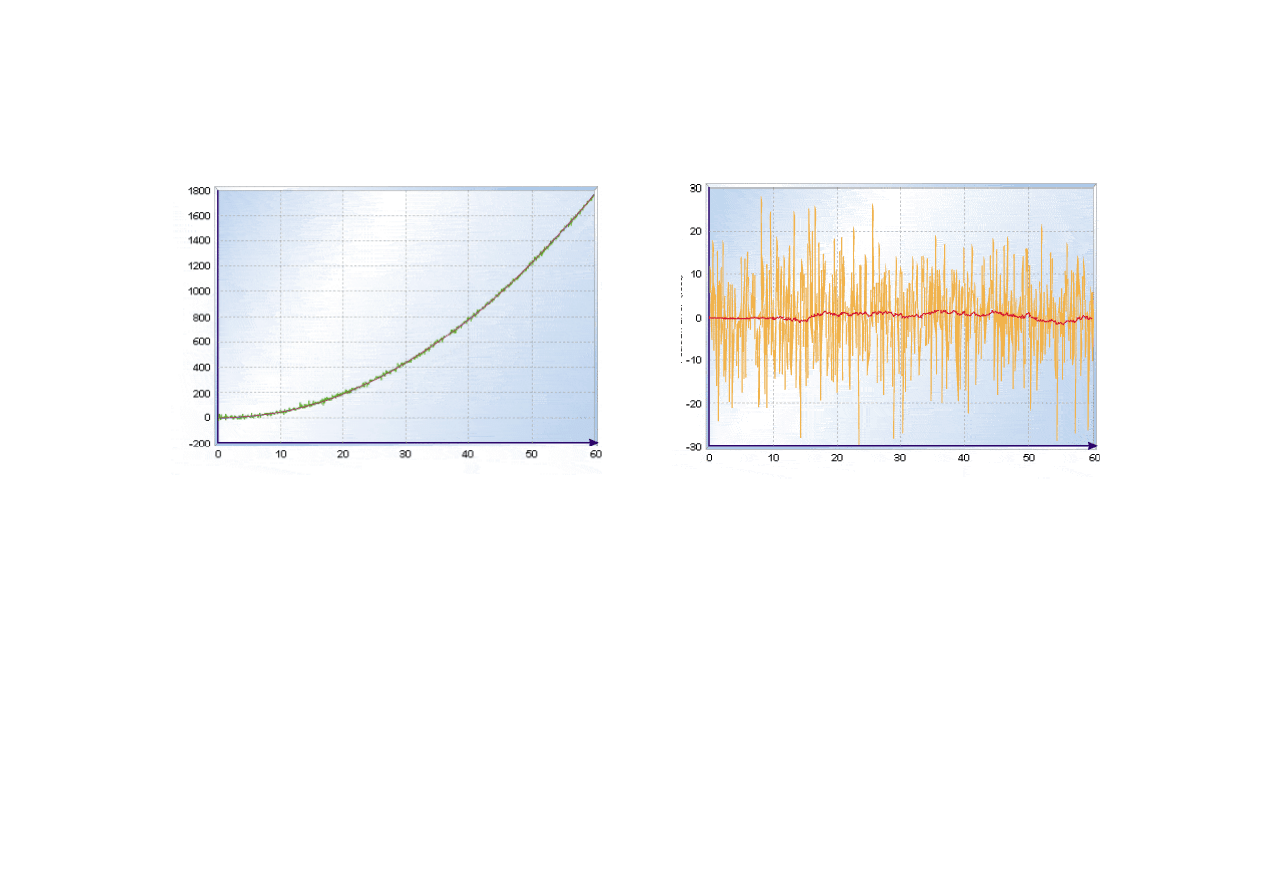
Przykład filtracji Kalmana
Sterowanie pojazdem
(Dan Simon,
www.embedded.com
)
k
k
k
k
dt
dt
dt
n
u
x
x
+
+
=
−
2
2
1
1
1
0
1
[
]
k
k
k
w
x
z
+
=
0
1
Nale
ż
y wyznaczy
ć
estymacje poło
ż
enia i pr
ę
dko
ś
ci pojazdu
opisanego modelem
© F.A. Dul 2007
Poło
ż
enie pojazdu jest mierzone 10 razy na sekund
ę
, dt = 0.1,
z dokładno
ś
ci
ą
σ
z
= 3 m.
Przy
ś
pieszenie sterowania jest stałe i równe a = 0.33 m/s
2
.
Szum przy
ś
pieszenia wynosi
σ
a
= 0.07 m/s
2
.
Ze wzgl
ę
du na du
ż
y szum pomiarowy u
ż
ycie filtru Kalmana
powinno znacznie poprawi
ć
estymacj
ę
poło
ż
enia w stosunku
do warto
ś
ci zmierzonych.
gdzie:
x(t) = [x,v]
T
– stan pojazdu,
u(t) = [a]
– sterowanie (stałe przy
ś
pieszenie).
15.4. Filtracja Kalmana
k
k
k
k
n
u
x
x
+
+
=
−
1
.
0
005
.
0
1
0
1
.
0
1
1
Model ruchu pojazdu dla przyj
ę
tych warto
ś
ci
Macierz kowariancji bł
ę
du stanu jest równa
[
]
=
=
=
=
]
[
]
[
]
[
2
2
v
v
v
v
v
x
x
x
E
x
x
E
E
T
k
xx
Q
=
⋅
⋅
⋅
⋅
=
2
2
1
2
2
2
2
1
)
)
((
)
(
)
(
a
a
a
dt
dt
dt
σ
σ
σ
© F.A. Dul 2007
=
⋅
⋅
⋅
⋅
=
2
2
2
2
1
)
(
)
(
)
)
((
a
a
a
dt
dt
dt
σ
σ
σ
[ ] [ ]
[ ]
9
3
]
[
2
2
=
=
=
=
z
T
k
E
σ
zz
R
Macierz kowariancji bł
ę
du obserwacji jest równa
=
⋅
⋅
⋅
⋅
⋅
⋅
=
2
2
2
2
2
2
)
07
.
0
(
)
1
.
0
(
)
07
.
0
(
)
1
.
0
(
)
005
.
0
(
)
07
.
0
(
)
1
.
0
(
)
005
.
0
(
)
07
.
0
(
)
005
.
0
(
⋅
⋅
⋅
⋅
=
−
−
−
−
5
6
6
7
10
90
.
4
10
45
.
2
10
45
.
2
10
225
.
1
P
o
ło
ż
e
n
ie
(f
t)
15.4. Filtracja Kalmana
Poło
ż
enie dokładne, zmierzone i estymacja poło
ż
enia
B
ł
ą
d
p
o
ło
ż
e
n
ia
(
ft
)
Czas (s)
© F.A. Dul 2007
Poło
ż
enie dokładne i jego
estymacja
s
ą
bardzo bliskie.
Poło
ż
enie
zmierzone
jest silnie
zaszumione.
Czas (s)
U
ż
ycie filtru Kalmana znacznie (~10 razy) poprawiło
estymacj
ę
poło
ż
enia w stosunku do warto
ś
ci zmierzonych.
Odchylenie standardowe
bł
ę
du
estymacji
poło
ż
enia ~0.7 m.
Odchylenie standardowe
bł
ę
du
pomiaru
poło
ż
enia ~3
÷
10 m.
15.4. Filtracja Kalmana
Pr
ę
dko
ść
dokładna i jej estymacja
P
r
ę
d
k
o
ś
ć
(
ft
/s
)
B
ł
ą
d
p
r
ę
d
k
o
ś
c
i
(f
t/
s
)
© F.A. Dul 2007
Pr
ę
dko
ść
dokładna
oraz jej
estymacja
s
ą
bardzo bliskie
Czas (s)
Wida
ć
tutaj dodatkow
ą
zalet
ę
filtru Kalmana - pozwala on
uzyska
ć
poprawn
ą
estymat
ę
pr
ę
dko
ś
ci
bez konieczno
ś
ci
pomiaru samej pr
ę
dko
ś
ci
.
Czas (s)
Odchylenie standardowe
bł
ę
du pomiaru
pr
ę
dko
ś
ci
~0.35 m/s.
• model obiektu musi by
ć
liniowy,
• bł
ę
dy modelu i pomiarów musz
ą
mie
ć
rozkład normalny
Gaussa.
15.4. Filtracja Kalmana
Ograniczenia klasycznej filtracji Kalmana
Mimo swoich niezaprzeczalnych zalet klasyczny filtr Kalmana
ma dwa powa
ż
ne ograniczenia:
Liniowo
ść
układu i gaussowski rozkład bł
ę
dów s
ą
w praktyce
ograniczeniami istotnymi.
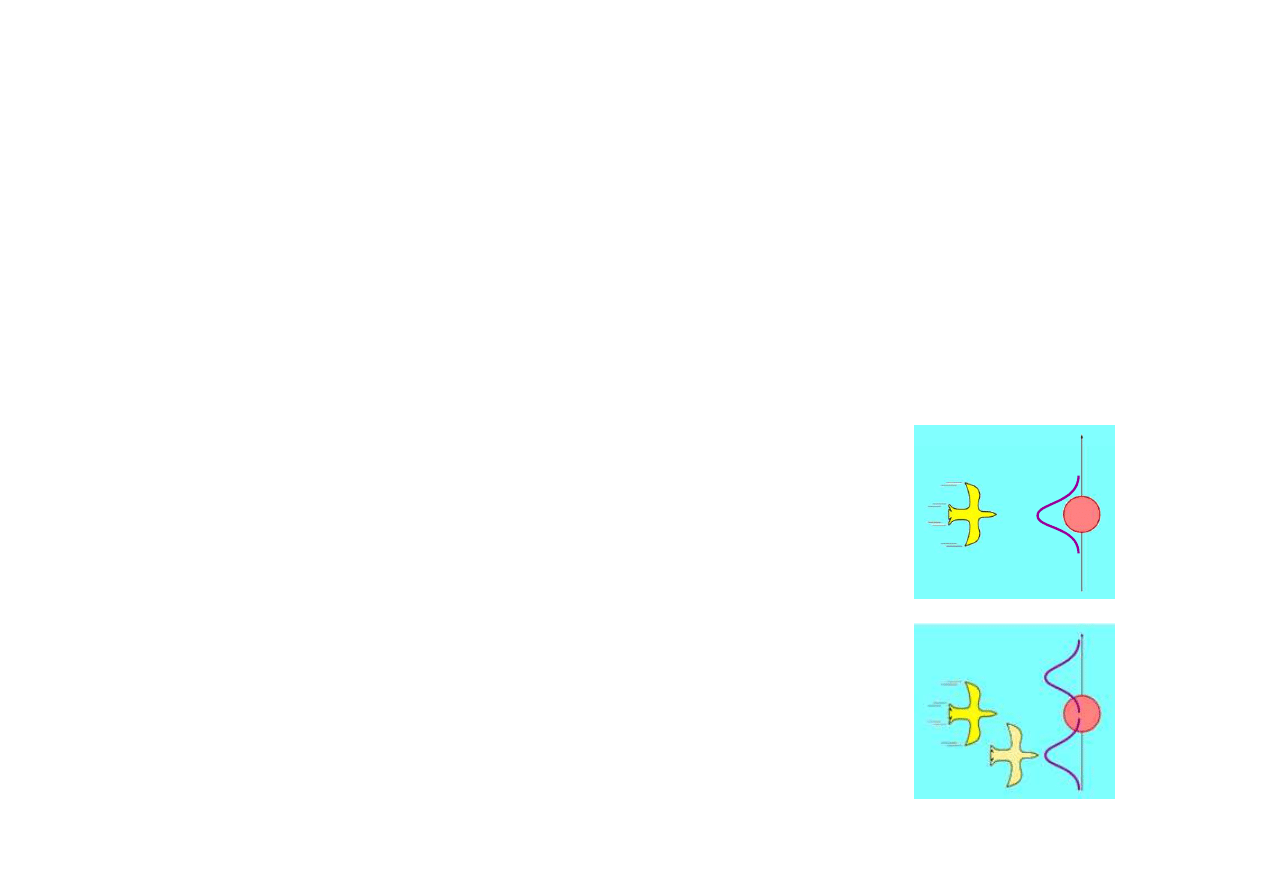
Przykład
Wła
ś
ciwa estymacja poło
ż
enia powinna
umo
ż
liwi
ć
omini
ę
cie drzewa.
© F.A. Dul 2007
Przykład
Estymacja poło
ż
enia lec
ą
cego ptaka przy
zało
ż
eniu rozkładu Gaussa dla bł
ę
dów
modelu lotu sugeruje lot wprost na drzewo.
Wymaga to jednak u
ż
ycia modelu nieliniowego.
Rozszerzony filtr Kalmana
(extended
Kalman filter) pozwala analizowa
ć
modele
nieliniowe o ile nieliniowo
ś
ci nie s
ą
zbyt silne.

• Nawigacja kosmiczna, lotnicza, l
ą
dowa i morska.
• Systemy nawigacji satelitarnej.
• Systemy naprowadzania bezwładno
ś
ciowego.
• Systemy autopilotów.
• Układy
ś
ledzenia radarowego i sonarowego.
• Wyznaczanie trajektorii cz
ą
stek elementarnych.
• Numeryczne prognozowanie pogody.
• Modelowanie cyrkulacji oceanów i atmosfery na podstawie
obrazów satelitarnych.
15.4. Filtracja Kalmana
Zastosowania filtracji Kalmana
obrazów satelitarnych.
• Równoczesna lokalizacja i tworzenie mapy (eksploracja
przez roboty nieznanego
ś
rodowiska).
• Sterowanie procesami produkcyjnymi.
• Nadzór elektrowni atomowych.
• Modelowanie demografii.
• Detekcja radioaktywno
ś
ci ziemskiej.
• Uczenie w logice rozmytej i sieciach neuronowych.
• Ekonomia, w szczególno
ś
ci makroekonomia, ekonometria.
• Rozpoznawanie obrazów.
© F.A. Dul 2007
Filtry Kalmana
Znaczenie filtru Kalmana jest trudne do przecenienia.
Filtr Kalmana umo
ż
liwił realizacj
ę
lotów na Ksi
ęż
yc
i jest powszechnie u
ż
ywany w nawigacji, sterowaniu
oraz wielu innych dziedzinach.
Wynalezienie filtru Kalmana przyczyniło si
ę
w stopniu
zasadniczym do rozwoju powy
ż
szych dziedzin.
©
F.A. Dul 2007
Chocia
ż
filtr Kalmana posiada ograniczenia, to jest
w dalszym ci
ą
gu podstawowym narz
ę
dziem
stochastycznego wnioskowania dynamicznego.
Ograniczenia filtracji Kalmana mo
ż
na omin
ąć
stosuj
ą
c bardziej ogólne
dynamiczne sieci Bayesa
.
15.5. Dynamiczne sieci Bayesa
Dynamiczna sie
ć
Bayesa
(dynamic Bayesian network, DBN)
słu
ż
y do reprezentacji dowolnych dynamicznych modeli
probabilistycznych.
Ka
ż
dy ukryty model Markowa mo
ż
e by
ć
reprezentowany
przez dynamiczn
ą
sie
ć
Bayesa, za
ś
ka
ż
dy HMM mo
ż
e by
ć
przekształcony do postaci DBN.
Ka
ż
dy filtr Kalmana mo
ż
e by
ć
reprezentowany przez
dynamiczn
ą
sie
ć
Bayesa, ale nie an odwrót.
© F.A. Dul 2007
dynamiczn
ą
sie
ć
Bayesa, ale nie an odwrót.
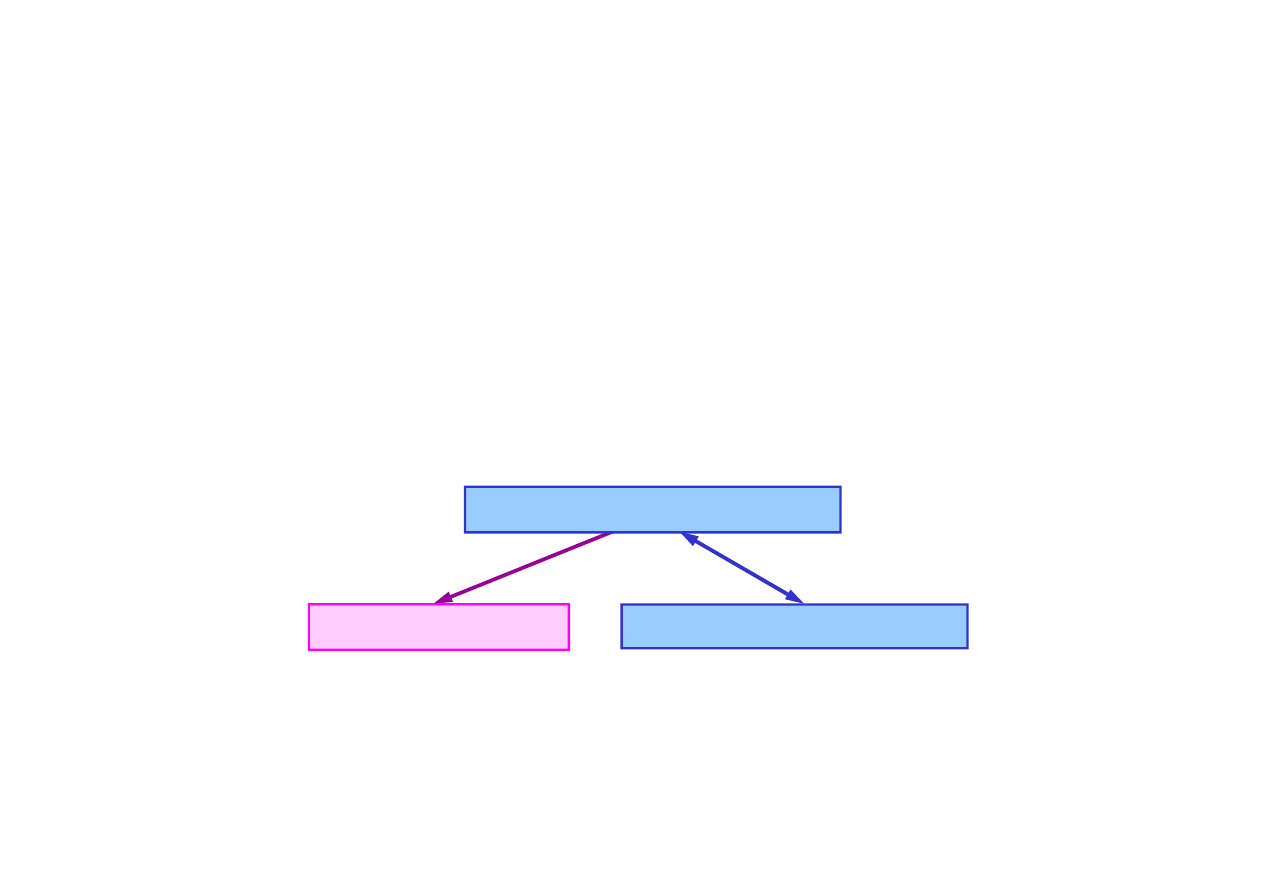
Dynamiczna sie
ć
Bayesa mo
ż
e reprezentowa
ć
zmienne
losowe z wieloma maksimami lokalnymi, czego nie mo
ż
na
osi
ą
gn
ąć
przy pomocy rozkładu Gaussa.
Dynamczne sieci Bayesa
Ukryte modele Markowa
Filtr Kalmana
15.5. Dynamiczne sieci Bayesa
Przykłady dynamicznych sieci Bayesa
DBN dla zadania z parasolem
DBN dla ruchu robota
w płaszczy
ź
nie X-Y
Deszcz
1
Deszcz
0
R
1
P(U
1
)
t
f
0.90
0.20
Parasol
1
R
-0
P(R
0
)
t
f
0.70
0.30
P(R
0
)
0.70
Bateria
1
Bateria
0
MiernikB
1
© F.A. Dul 2007
V
0
V
1
Z
1
X
0
X
1
Do budowy DBN potrzebne s
ą
:
• rozkład prawdopodobie
ń
stwa
pocz
ą
tkowego zmiennej stanu
P
(
X
0
),
• model przej
ś
cia
P
(
X
t
|
X
t-1
),
• model obserwacji
P
(
E
t
|
X
t
),
• topologia sieci.
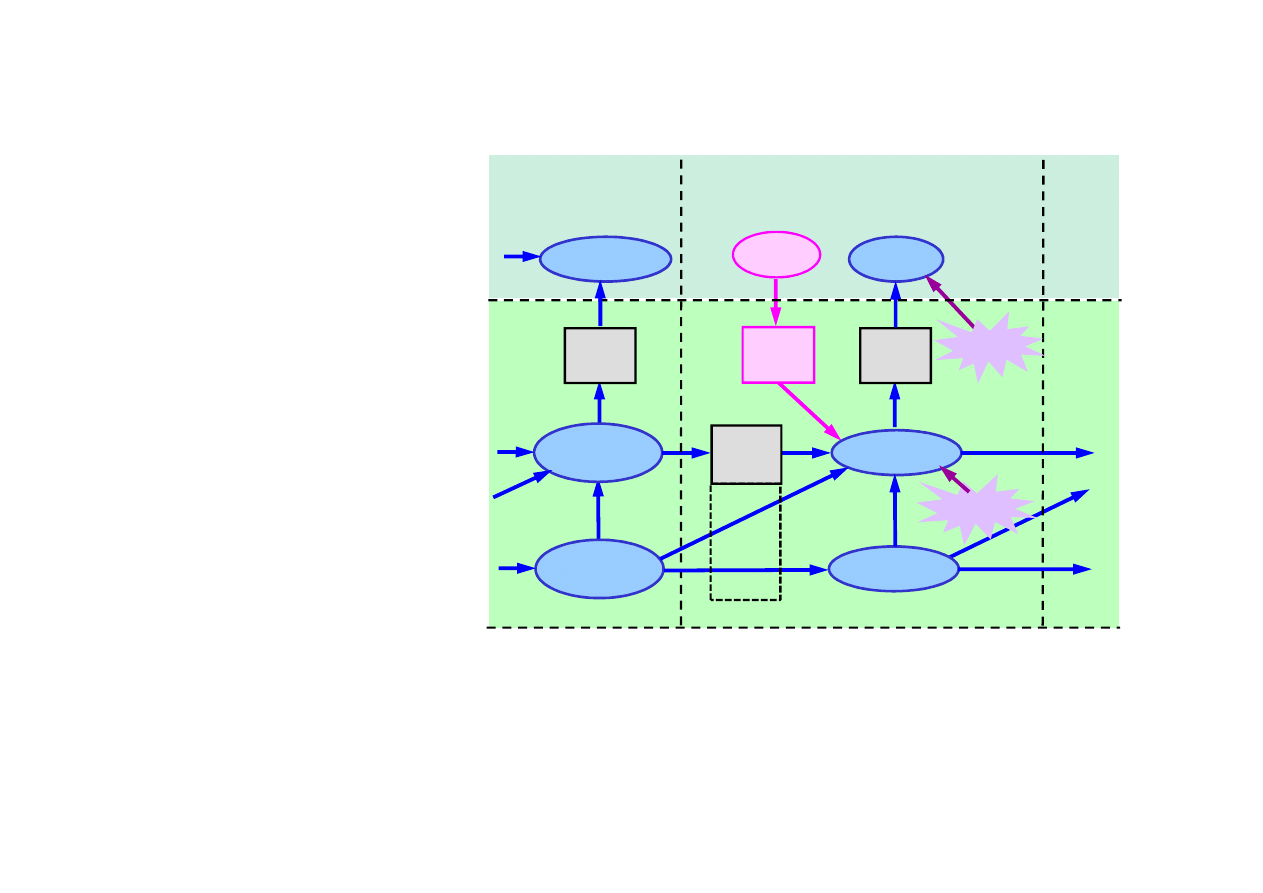
15.5. Dynamiczne sieci Bayesa
Wnioskowane
ś
cisłe w dynamicznych sieciach Bayesa
Wnioskowanie w DBN mo
ż
e by
ć
przeprowadzone tak, jak
w zwykłej sieci Bayesa.
Nale
ż
y w tym celu rozwin
ąć
sie
ć
powielaj
ą
c wielokrotnie
warstw
ę
pocz
ą
tkow
ą
(unrolling)
Deszcz
1
Deszcz
0
R
-0
P(R
0
)
t
f
0.70
0.30
P(R
0
)
0.70
Deszcz
2
R
-0
P(R
0
)
t
f
0.70
0.30
Deszcz
3
R
-0
P(R
0
)
t
f
0.70
0.30
. . .
© F.A. Dul 2007
R
1
P(U
1
)
t
f
0.90
0.20
Parasol
1
R
1
P(U
1
)
t
f
0.90
0.20
Parasol
2
R
1
P(U
1
)
t
f
0.90
0.20
Parasol
3
Rozwini
ę
ta DBN umo
ż
liwia reprezentowanie nawet bardzo
zło
ż
onych procesów w zwi
ę
zły sposób.
Wnioskowanie
ś
cisłe w sieci rozwini
ę
tej jest jednak bardzo
kosztowne, co praktycznie uniemo
ż
liwia u
ż
ycie metod
stosowanych w zwykłych sieciach Bayesa.

15.5. Dynamiczne sieci Bayesa
Wnioskowane przybli
ż
one w dynamicznych sieciach
Bayesa
Wnioskowanie przybli
ż
one w dynamicznych sieciach Bayesa
polega na zastosowaniu ogólnej zasady filtracji oddzielnie
dla ka
ż
dej warstwy czasowej bez rozwijania sieci.
Tak wyznaczone zmienne stanu stanowi
ą
reprezentacj
ę
przybli
ż
on
ą
rzeczywistego (
ś
cisłego) rozkładu stanu.
Do wnioskowania przybli
ż
onego słu
żą
do tego
algorytmy
filtrowania cz
ą
stkowego
.
• Na podstawie rozkładu P(X ) tworzy si
ę
zbiór N próbek
© F.A. Dul 2007
• Na podstawie rozkładu P(X
0
) tworzy si
ę
zbiór N próbek
X
0
(i), i = 1,...N.
• Za pomoc
ą
modelu przej
ś
cia
P(X
t+1
|X
t
) d
la ka
ż
dej próbki
wyznaczany jest stan nast
ę
pny.
• Ka
ż
da próbka jest wa
ż
ona za pomoc
ą
wiarygodno
ś
ci
okre
ś
laj
ą
cej jej wkład do nowych obserwacji P(e
t+1
|x
t+1
).
• Nowa populacja próbek jest generowana za pomoc
ą
modelu przej
ś
cia z uwzgl
ę
dnieniem wag próbek.
Przy wystarczaj
ą
cej liczbie N próbek wnioskowanie przybli
ż
one
prowadzi do wyników
ś
cisłych, N(x
t
|e
1:t
)/N = P(x
t
|e
1:t
).

15.6. Rozpoznawanie mowy
Rozpoznawanie mowy
pozwala komputerowi wyposa
ż
onemu
w urz
ą
dzenie do rejestracji d
ź
wi
ę
ku (mikrofon) interpretowa
ć
mow
ę
ludzk
ą
.
Rozpoznawanie mowy pełni wa
ż
n
ą
rol
ę
w wielu dziedzinach:
• interakcja człowieka z systemami komputerowymi,
• obsługa urz
ą
dze
ń
gospodarstwa domowego,
• sterowanie pojazdami – samochodami, samolotami,
statkami kosmicznymi,...
© F.A. Dul 2007
statkami kosmicznymi,...
• automatyczne notowanie.
Rozpoznawanie mowy polega na identyfikacji ci
ą
gu słów
wypowiedzianych przez mówc
ę
na podstawie zarejestrowane-
go sygnału akustycznego.
Zrozumienie
wypowiedzi jest krokiem nast
ę
pnym.
Zadaniem komplementarnym jest
synteza mowy
.
Jest to zadanie du
ż
o łatwiejsze ni
ż
rozpoznawanie mowy
(podobnie jak rysowanie obiektów jest znacznie łatwiejsze
ni
ż
ich rozpoznawanie).
Mowa naturalna jest bardzo trudna do analizy, gdy
ż
:
15.6. Rozpoznawanie mowy
• ten sam mówca mo
ż
e ró
ż
nie wypowiada
ć
to samo słowo,
• ró
ż
ne słowa mog
ą
brzmie
ć
podobnie,
• ró
ż
ni mówcy mog
ą
wymawia
ć
słowo w ró
ż
ny sposób,
• tempo, intonacja i gło
ś
no
ść
mog
ą
zmienia
ć
si
ę
nawet w tej
samej wypowiedzi,
• gdy mówi wiele osób pojawiaj
ą
si
ę
interferencje słów,
• w płynnej wypowiedzi słowa zlewaj
ą
si
ę
,
• mowa mo
ż
e by
ć
zaszumiona, zniekształcona.
© F.A. Dul 2007
• mowa mo
ż
e by
ć
zaszumiona, zniekształcona.
Rozpoznawanie mowy jest wi
ę
c zadaniem wnioskowania
probabilistycznego.
Rozpoznawanie mowy jest najwa
ż
niejszym zastosowaniem
czasowych modeli probabilistycznych.

Sformułowanie zadania rozpoznawania mowy
Words
– zmienna losowa opisuj
ą
ca wszystkie mo
ż
liwe słowa.
signal
– obserwowany ci
ą
g sygnałów akustycznych.
Najbardziej prawdopodobn
ą
interpretacj
ą
wypowiedzi jest
warto
ść
zmiennej
Words
maksymalizuj
ą
ca
P(words | signal).
Z reguły Bayesa
15.6. Rozpoznawanie mowy
)
(
)
|
(
)
|
(
Words
P
Words
signal
P
signal
Words
P
α
=
P(signal |Words)
okre
ś
la
model akustyczny
opisuj
ą
cy
© F.A. Dul 2007
P(signal |Words)
okre
ś
la
model akustyczny
opisuj
ą
cy
brzmienie słów.
P(Words)
okre
ś
la
model j
ę
zyka
– prawdopodobie
ń
stwo
ka
ż
dej wypowiedzi.
Modele j
ę
zyka okre
ś
laj
ą
prawdopodobie
ń
stwa wyst
ą
pienia
ci
ą
gu słów:
- bigram: prawdopodobie
ń
stwa dwóch kolejnych słów.
- trigram: prawdopodobie
ń
stwa trzech kolejnych słów, itd.
Np.:
P(”It is”) = 0.96, P(”It this”) = 0.001.

Fonem (phoneme) jest najmniejsz
ą
jednostk
ą
mowy
rozró
ż
nian
ą
przez u
ż
ytkowników danego j
ę
zyka.
Alfabet j
ę
zyka liczy zwykle 40-50 fonemów, np. International
Phonetic Alphabet (IPA), czy ARPAbet (American English):
[t] –
t
en, [ow] – b
oa
t, [m] –
m
et, [aa] – c
o
t, ...
Słowo „
tomato”
ma reprezentacj
ę
fonetyczn
ą
[t ow m aa t ow ].
Fonemy umo
ż
liwiaj
ą
podział modelu akustycznego na
model
wymowy
oraz
model fonemów
.
Model wymowy okre
ś
la rozkład prawdopodobie
ń
stwa
15.6. Rozpoznawanie mowy
© F.A. Dul 2007
Model wymowy okre
ś
la rozkład prawdopodobie
ń
stwa
ka
ż
dego słowa wzgl
ę
dem zbioru wszystkich fonemów.
Zmienna X
t
okre
ś
la fonem wypowiedziany w chwili t.
Model fonemów okre
ś
la sposób realizacji fonemów jako
sygnałów akustycznych.
Zmienna ukrytego modelu Markowa E
t
okre
ś
la własno
ś
ci
sygnału w chwili t.
Model fonemów okre
ś
la prawdopodobie
ń
stwo
P(E
t
|X
t
)
pojawienia si
ę
w chwili t własno
ś
ci E
t
w sygnale je
ż
eli
wypowiedziany został fonem X
t
.
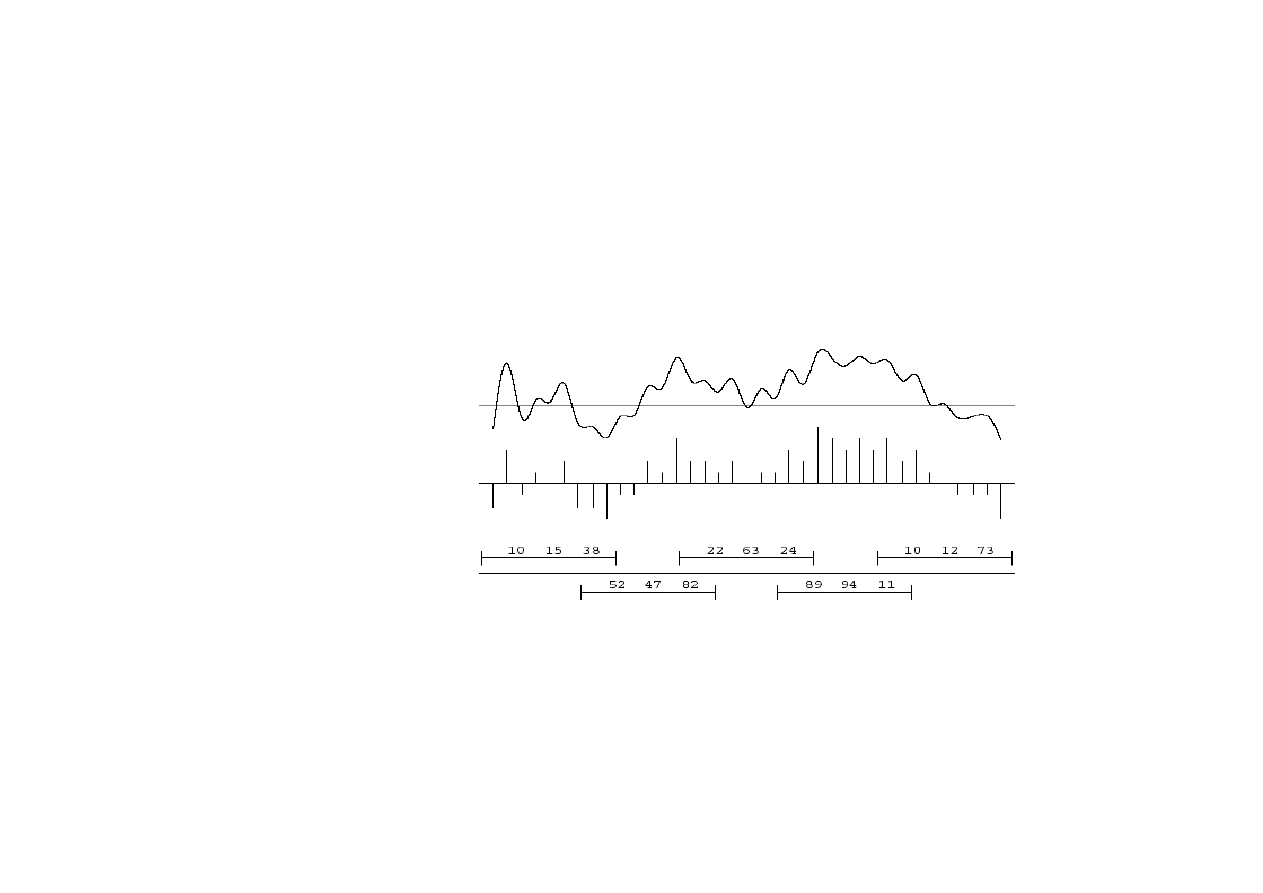
Reprezentacja sygnału mowy
Próbkowanie sygnału odbywa si
ę
z cz
ę
stotliwo
ś
ci
ą
8-16 kHz.
Sygnał rejestrowany jest z rozdzielczo
ś
ci
ą
8-12 bitów.
Wymagana pami
ęć
jest du
ż
a – 1 MBajt / minut
ę
wypowiedzi,
wi
ę
c wyznaczenie
P(signal | phone)
nie jest praktyczne.
15.6. Rozpoznawanie mowy
Sygnał analogowy
© F.A. Dul 2007
Sygnał próbkowany
dyskretny
Ramki z własno
ś
ciami
Mowa reprezentowana jest wi
ę
c poprzez
ramki
(frames)
opisuj
ą
ce
n
własno
ś
ci
sygnału (features) w małych
przedziałach czasu (~50-100 próbek).
Własno
ś
ciami mog
ą
by
ć
np. energie d
ź
wi
ę
ku, formanty, itp.

Własno
ś
ci w ramkach s
ą
reprezentowane w zwartej postaci
za pomoc
ą
:
15.6. Rozpoznawanie mowy
• kwantyzacji wektorowej VC (obecnie rzadziej u
ż
ywana),
• mieszanek Gaussa.
Mieszanka Gaussa to zbiór
k
rozkładów Gaussa z ró
ż
nymi
warto
ś
ciami
ś
rednimi i wariancjami dobranymi tak, aby jak
najlepiej reprezentowały rozkład prawdopodobie
ń
stwa
P(features | phone)
w obszarze ramki.
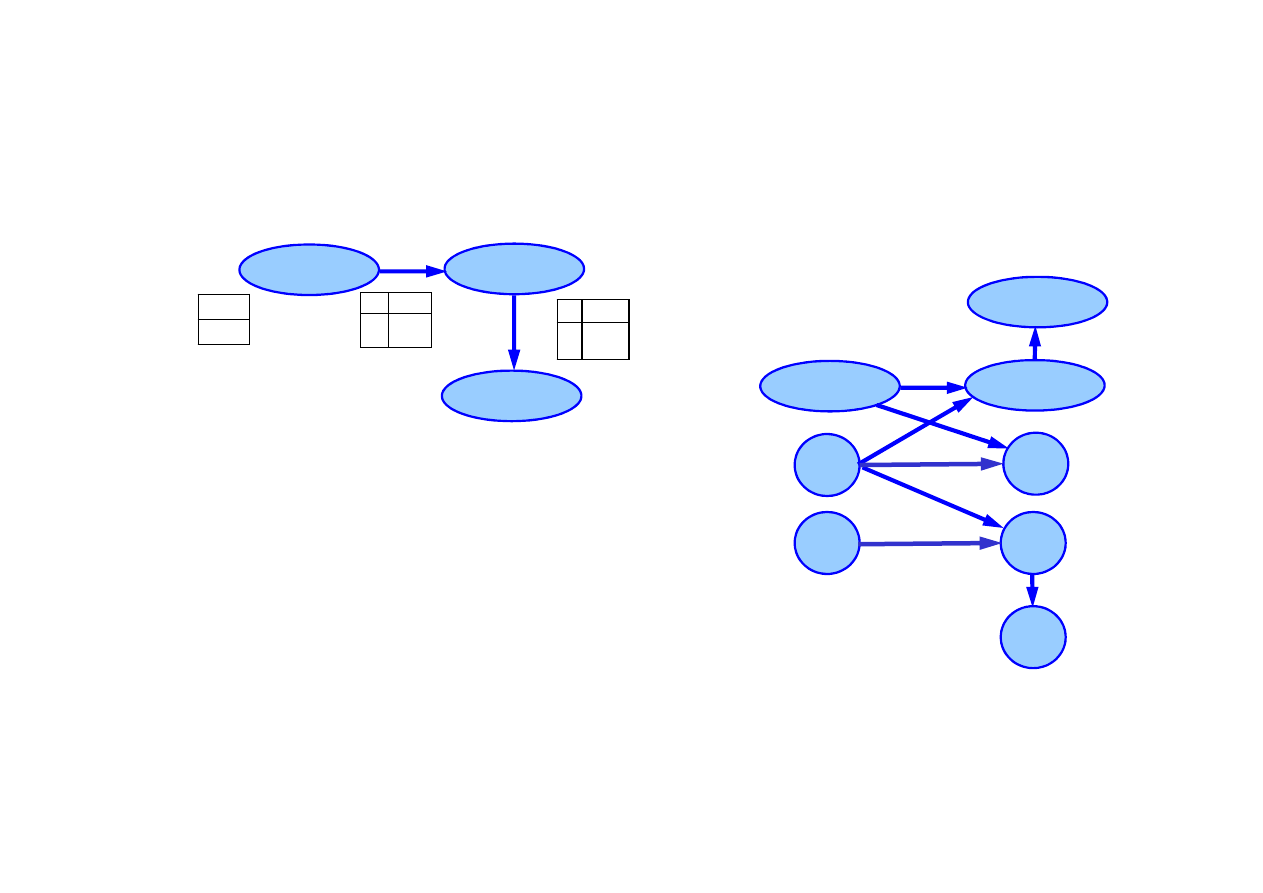
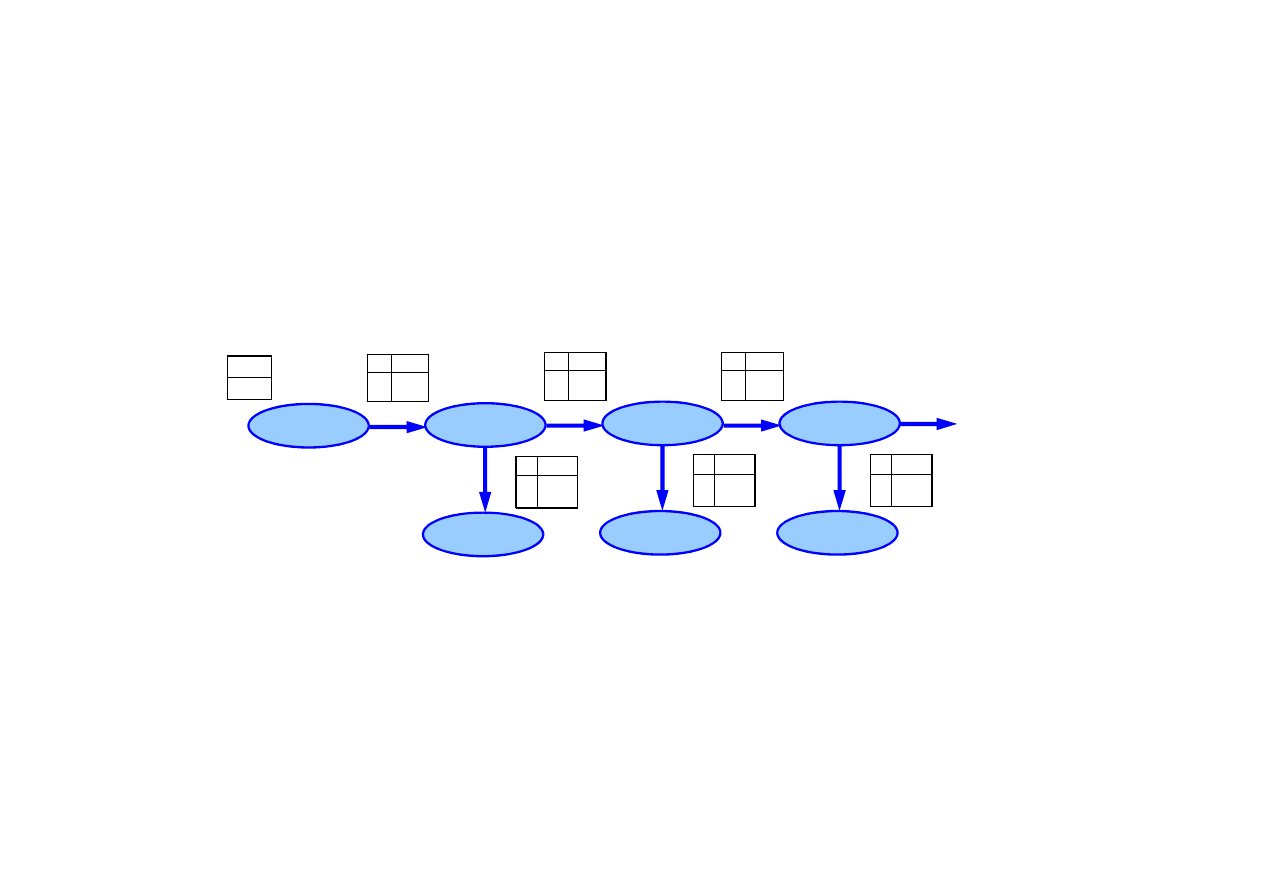
Struktura czasowa fonemu opisywana jest
modelem
© F.A. Dul 2007
Struktura czasowa fonemu opisywana jest
modelem
trójstanowym
: ka
ż
dy fonem składa si
ę
z trzech faz: Pocz
ą
tek,
Ś
rodek, Koniec (Onset, Mid, End).
Kontekst w którym pojawia si
ę
fonem opisywany jest
modelem trójfonemowym
: model akustyczny fonemu
uwzgl
ę
dnia trójk
ę
fonemów: poprzedni, bie
żą
cy i nast
ę
pny.
Kombinacja modeli trójstanowego i trójfonemowego pozwala
zwi
ę
kszy
ć
liczb
ę
mo
ż
liwych stanów z
n
do
3n
3
, co znacznie
poprawia dokładno
ść
reprezentacji sygnału akustycznego.
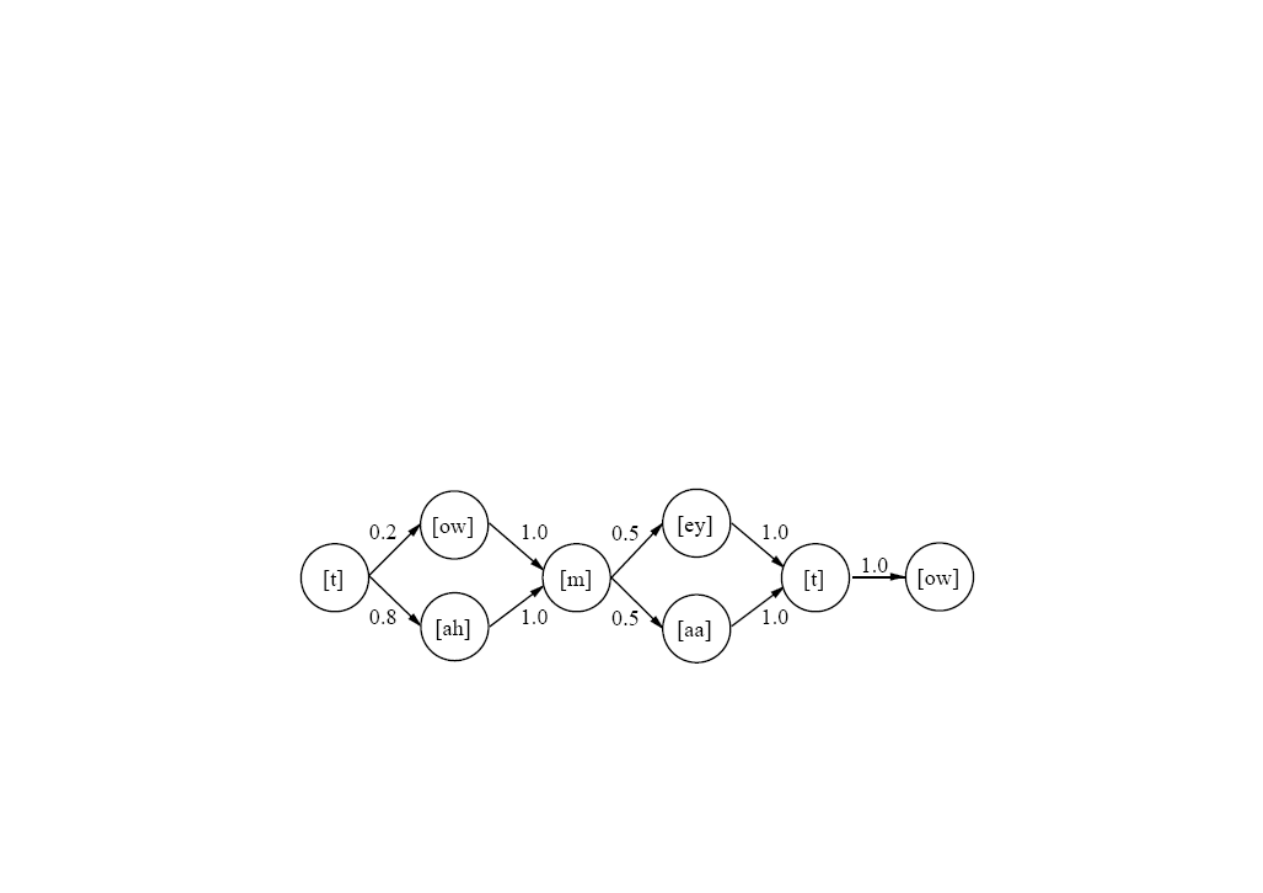
Słowa
Słowo jest okre
ś
lone rozkładem prawdopodobie
ń
stwa
P(X
1:t
| word )
w którym
X
i
jest fonemem w i-tej ramce.
Model słowa
- rozkład prawdopodobie
ń
stwa dla słowa -
okre
ś
lony jest przez
modelu wymowy
oraz
model fonemu
.
Model wymowy okre
ś
la rozkład prawdopodobie
ń
stwa dla
słowa wzgl
ę
dem fonemów, bez uwzgl
ę
dnienia ramek i czasu.
Słowo mo
ż
e mie
ć
kilka modeli wymowy, np. słowo „tomato”
ma nast
ę
puj
ą
ce cztery modele:
15.6. Rozpoznawanie mowy
© F.A. Dul 2007
ma nast
ę
puj
ą
ce cztery modele:
P( [t ow m ey t ow] |”tomato” ) = 0.1
P( [t ow m aa t ow] |”tomato” ) = 0.1
P( [t ah m ey t ow] |”tomato” ) = 0.4
P([t ah m aa t ow] |”tomato” ) = 0.4
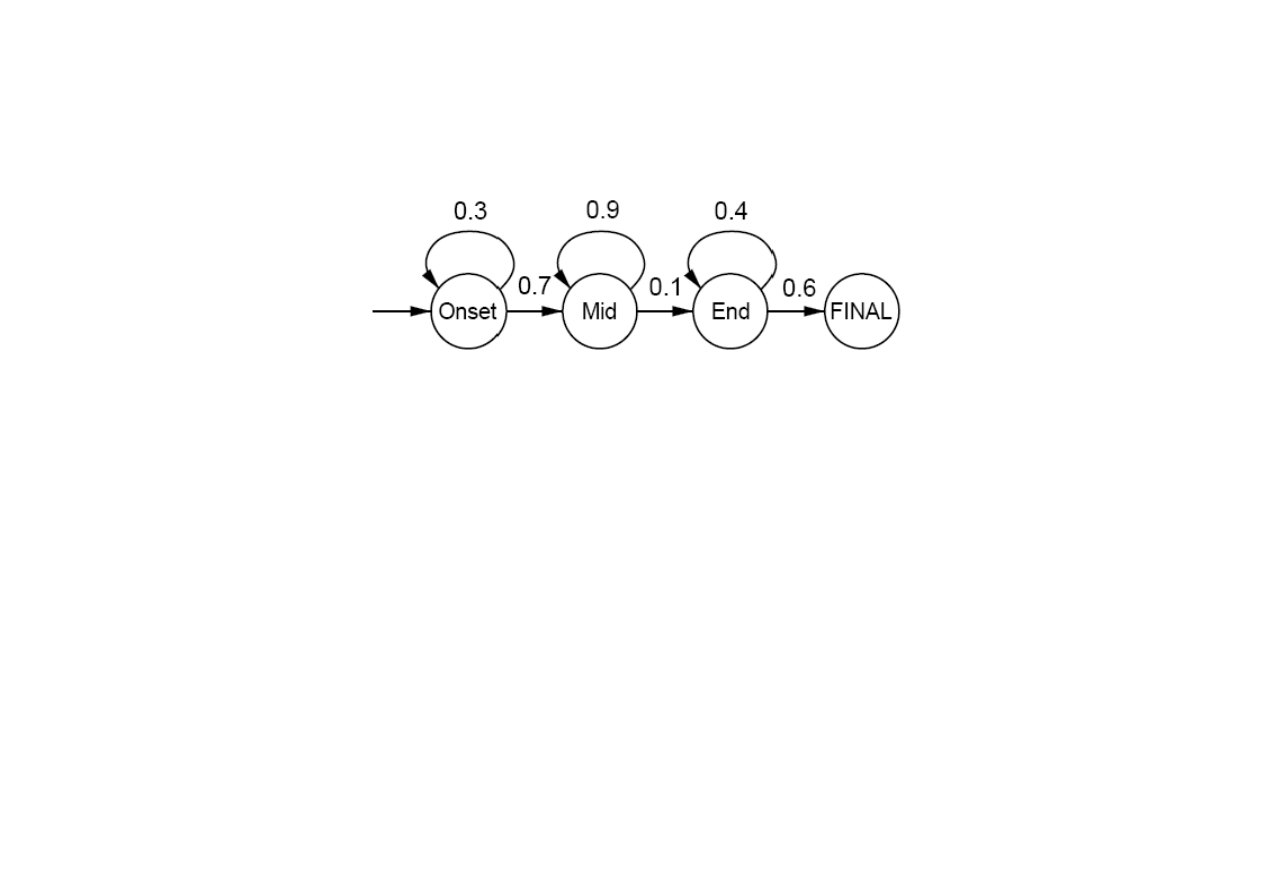
Modele fonemów okre
ś
laj
ą
odwzorowanie fonemów na ramki.
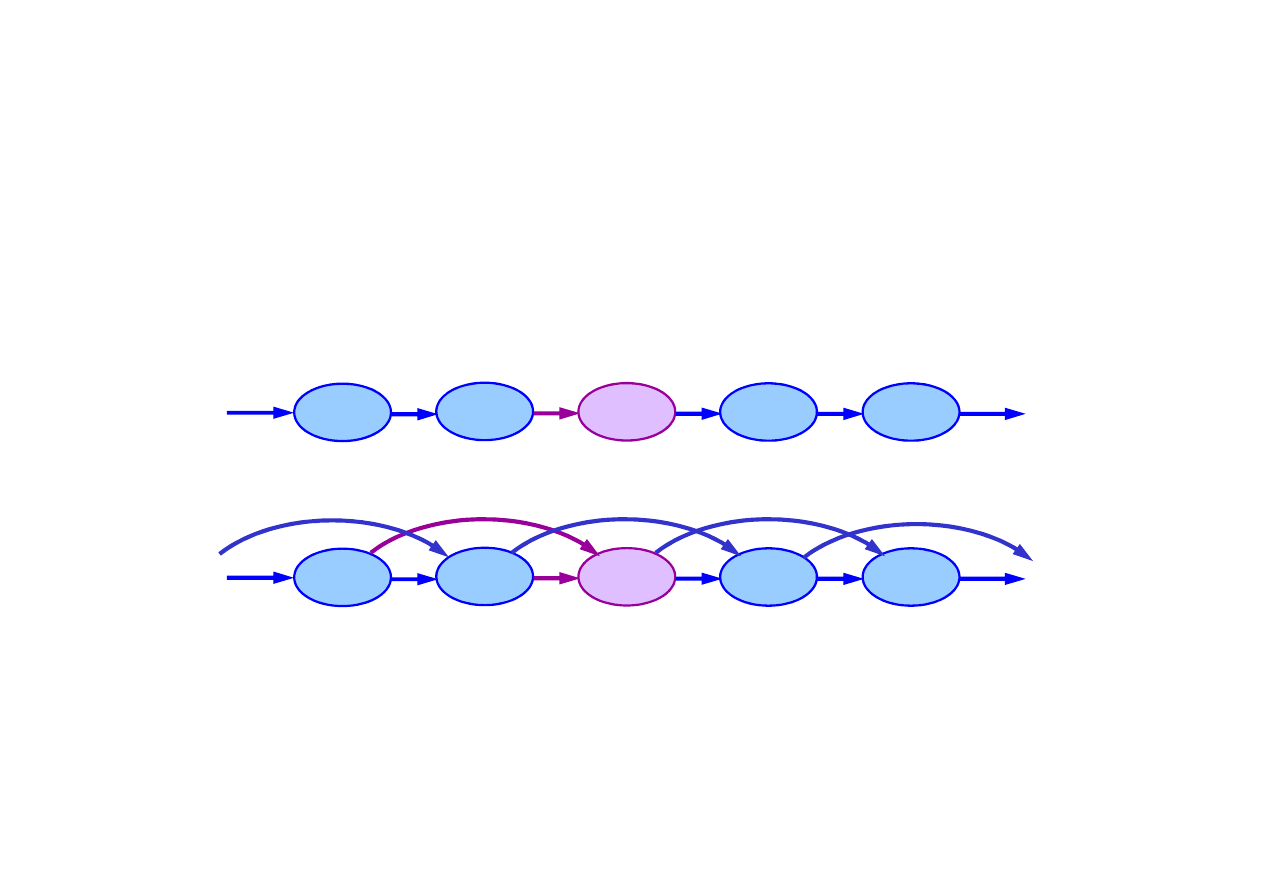
Przykład modelu trójstanowego dla fonemu [m]
15.6. Rozpoznawanie mowy
Modele stanów Onset, Mid i End okre
ś
laj
ą
realizacj
ę
akustyczn
ą
fonemu poprzez prawdopodobie
ń
stwa trwania
stanów (p
ę
tle).
© F.A. Dul 2007
akustyczn
ą
fonemu poprzez prawdopodobie
ń
stwa trwania
stanów (p
ę
tle).
Model słowa w poł
ą
czeniu z modelem fonemu okre
ś
la
wiarygodno
ść
dla słowa izolowanego,
P(word | e
1:t
) =
α
P(e
1:t
| word ) P(word )
Prawdopodobie
ń
stwo a priori
P(word )
wyznacza si
ę
zliczaj
ą
c
cz
ę
sto
ść
wyst
ę
powania słowa, za
ś
P(e
1:t
| word )
mo
ż
na
obliczy
ć
rekurencyjnie
∑
=
t
X
t
t
t
e
X
word
e
P
)
,
(
)
|
(
:
1
:
1
P

Wypowiedzi
Dialog wymaga zrozumienia wypowiedzi ci
ą
głej.
Zrozumienie ci
ą
głej wypowiedzi wymaga
segmentacji
–
wła
ś
ciwego podziału ła
ń
cucha wypowiedzi na słowa.
Wypowied
ź
ci
ą
gła nie jest jednak prost
ą
sum
ą
ci
ą
gu słów –
sekwencja najbardziej prawdopodobnych słów nie jest
najbardziej prawdopodobn
ą
sekwencj
ą
słów.
Model j
ę
zyka
okre
ś
la prawdopodobie
ń
stwo ła
ń
cucha jako
ci
ą
gu kolejnych słów
15.6. Rozpoznawanie mowy
© F.A. Dul 2007
ci
ą
gu kolejnych słów
)
...
|
(
...
)
|
(
)
(
)
...
(
1
1
1
2
1
1
−
=
n
n
n
w
w
w
P
w
w
P
w
P
w
w
P
)
|
(
)
...
|
(
1
1
1
−
−
≈
i
i
i
i
w
w
P
w
w
w
P
W praktyce u
ż
ywa si
ę
przybli
ż
enia
bigram
dla dwóch słów
Prawdopodobie
ń
stwa modelu bigram mog
ą
by
ć
wyznaczone
poprzez zliczanie wyst
ą
pie
ń
w du
ż
ym zbiorze wypowiedzi.
Przybli
ż
enia u
ż
ywaj
ą
ce trzech lub wi
ę
cej słów s
ą
du
ż
o
dokładniejsze, lecz trudniejsze do oszacowania.
∏
=
−
=
n
i
i
i
w
w
w
P
1
1
1
)
...
|
(
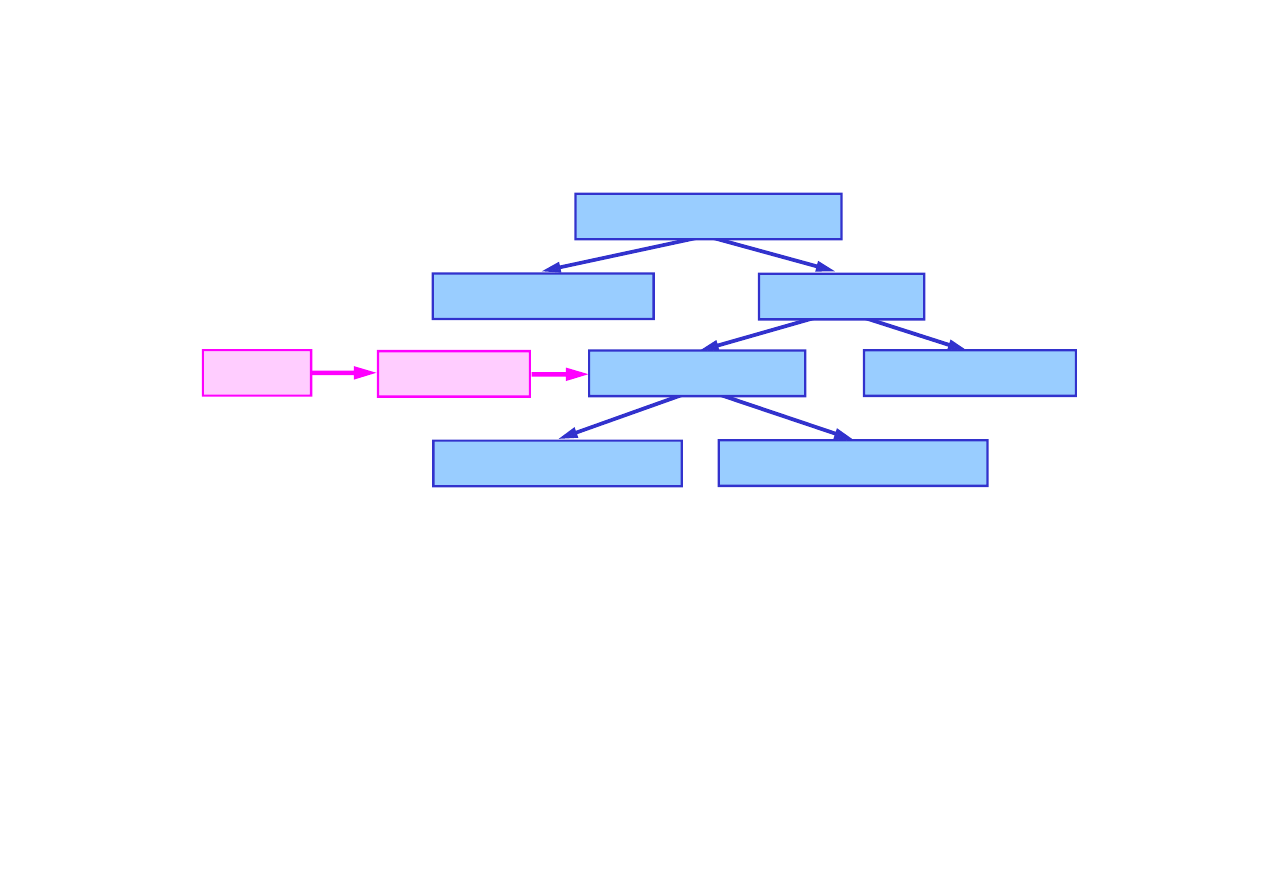
Model wypowiedzi
w postaci ukrytego modelu Markowa
(HMM) dla tworzy si
ę
z modeli nast
ę
puj
ą
co:
15.6. Rozpoznawanie mowy
Model wypowiedzi
Model j
ę
zyka
Model słów
Model wymowy
Model fonemów
Własno
ś
ci
Ramki
© F.A. Dul 2007
Najbardziej prawdopodobny ci
ą
g słów dla danego ła
ń
cucha,
wyznacza si
ę
na podstawie modelu wypowiedzi np. za
pomoc
ą
algorytmu Viterbiego.
Segmentacji ła
ń
cucha dokonuje si
ę
na podstawie tak
wyznaczonego ci
ą
gu słów.
Najbardziej prawdopodobny ci
ą
g słów w wypowiedzi mo
ż
na
wyznaczy
ć
bardzo efektywnie za pomoc
ą
dekodera A*
,
uzupełnionego odpowiedni
ą
heurystyk
ą
.
Model trójfonemowy
Model trójstanowy

Budowa systemów rozpoznawania mowy
Jako
ść
systemów rozpoznawania mowy zale
ż
y od jako
ś
ci
wszystkich elementów: modelu j
ę
zyka, modeli wymowy słów,
modeli fonemów, algorytmów przetwarzania sygnałów mowy
oraz obszerno
ś
ci słowników wymowy słów.
Rozkłady prawdopodobie
ń
stw mog
ą
zawiera
ć
nawet miliony
parametrów definiuj
ą
cych modele sygnałów.
Parametry te mog
ą
by
ć
okre
ś
lone w ró
ż
ny sposób, ale
najlepsze rezultaty osi
ą
ga si
ę
poprzez
uczenie
modelu.
15.6. Rozpoznawanie mowy
© F.A. Dul 2007
najlepsze rezultaty osi
ą
ga si
ę
poprzez
uczenie
modelu.
Uczenie polega na dostrajaniu parametrów na podstawie
du
ż
ej liczby wypowiedzi.
Zaawansowane systemy rozpoznawania mowy u
ż
ywaj
ą
do treningu modeli ogromnych zbiorów wypowiedzi.
Do uczenia słu
ż
y algorytm maksymalizacji warto
ś
ci
oczekiwanej (expectation-maximization, EM).
Algorytm ten gwarantuje znaczn
ą
popraw
ę
jako
ś
ci modeli
w porównaniu z modelami nie uczonymi.

Systemy rozpoznawania mowy s
ą
rozwijane intensywnie,
zwłaszcza w ostatniej dekadzie, nie osi
ą
gn
ę
ły jednak jeszcze
zadowalaj
ą
cej skuteczno
ś
ci.
Niezawodno
ść
systemów rozpoznawania mowy zale
ż
y
od warunków akustycznych i sposobu wypowiedzi.
Wypowied
ź
jednej osoby, zło
ż
ona z pojedy
ń
czych słów z
niewielkiego słownika, odbywaj
ą
ca si
ę
w dobrych warunkach
akustycznych, bez du
ż
ych zakłóce
ń
, rozpoznawana jest
z dokładno
ś
ci
ą
95-99%.
15.6. Rozpoznawanie mowy
© F.A. Dul 2007
z dokładno
ś
ci
ą
95-99%.
W przypadku dowolnych wypowiedzi wielu osób typowa
dokładno
ść
rozpoznania wynosi 60-80%, nawet w dobrych
warunkach akustycznych.
Gdy warunki akustyczne s
ą
złe, dokładno
ść
jest mniejsza.
Niektóre systemy rozpoznawania mowy:
• w medycznych systemach diagnostycznych,
• w pakiecie Microsft Office,
• w telefonii komórkowej, bankowo
ś
ci, itp.

Wnioskowanie stochastyczne dynamiczne
Metody dynamicznego wnioskowania stochastyczne-
nego stanowi
ą
wa
ż
ne narz
ę
dzie analizy
rzeczywisto
ś
ci.
Filtr Kalmana umo
ż
liwił realizacj
ę
lotów na Ksi
ęż
yc
i jest powszechnie u
ż
ywany w nawigacji, sterowaniu
oraz wielu innych dziedzinach.
Dynamiczne sieci Bayesa pozwalaj
ą
modelowa
ć
©
F.A. Dul 2007
Dynamiczne sieci Bayesa pozwalaj
ą
modelowa
ć
zło
ż
one zjawiska stochastyczne.
Rozpoznawanie mowy jest wa
ż
nym zagadnieniem
komunikacji człowiek-maszyna.

Podsumowanie
• Zmiany stanu
ś
wiata w czasie mog
ą
by
ć
opisane zmiennymi
losowymi zale
ż
nymi od czasu.
• Modele procesów Markowa pozwalaj
ą
zwi
ęź
le modelowa
ć
stacjonarne procesy stochastyczne.
• Stochastyczny model dynamiczny składa si
ę
z modelu
przej
ś
cia i modelu obserwacji.
• Głównymi zadaniami wnioskowania stochastycznego
w czasie s
ą
: filtracja, predykcja, wygładzanie oraz
wyznaczanie najbardziej wiarygodnego wyja
ś
nienia.
© F.A. Dul 2007
wyznaczanie najbardziej wiarygodnego wyja
ś
nienia.
• Podstawowymi modelami dynamicznymi s
ą
sieci Bayesa
oraz ich szczególne przypadki: ukryte modele Markowa
oraz filtr Kalmana.
• Filtr Kalmana stanowi podstawowe narz
ę
dzie wnioskowania
stochastycznego dla układów dynamicznych.
• Zastosowanie Filtrów Kalmana jest bardzo szerokie:
nawigacja, sterowanie, uczenie, rozpoznawanie obrazów,…
• Rozpoznawanie mowy jest wa
ż
nym zadaniem wnioskowania
stochastycznego.
Wyszukiwarka
Podobne podstrony:
15 Wnioskowanie probabilistyczne ewolucyjne
15 litbid 16156 Nieznany (2)
15 11id 15945 Nieznany (2)
IMG 15 id 211090 Nieznany
36 15 id 36115 Nieznany (2)
Zestaw 15 3 id 587996 Nieznany
15 7id 15968 Nieznany (2)
IMG 15 id 211078 Nieznany
15 elektrostatykaid 16020 Nieznany (2)
09 15 id 53452 Nieznany (2)
Cwiczenie nr 15 id 125710 Nieznany
15 wnioski
47 3 1 15 id 39027 Nieznany (2)
Aprobata ITB Drut AT 15 4624 20 Nieznany (2)
Walka z terroryzmem międzynarodowym (wydawnictwo ABW), 15, Wnioski
automatyka i robotyka 15 16 Kub Nieznany (2)
cw1 15 id 122742 Nieznany
15 12id 15946 Nieznany (2)
WD pismo zawierajace wnioski do Nieznany
więcej podobnych podstron