CPS 1
2006/2007
SYGNAŁY DYSKRETNE
Definicje:
U
Sygnały dyskretne w czasie
U
reprezentowane są przez ciągi liczb i oznaczane
jako {x[n]}
Elementy tych ciągów nazywa się
U
próbkami
U
, wartości próbek sygnałów oznacza
się jako x[n] dla n całkowitych w zakresie
n
−∞ < < ∞
Sygnały dyskretne w czasie mogą być zapisane:
1. jako zależności pozwalające obliczyć n-tą wartość ciągu. Na przykład:
( )
1
3
0
0
0
n
n
x n
⎧⎪
⎡ ⎤ ⎨
⎣ ⎦
⎪⎩
≥
<
=
lub
{ }
( )
1 1
1
3 9
3
1, , , ,
,
n
x n
⎧
⎫
⎡ ⎤
⎨
⎬
⎣ ⎦
⎩
⎭
=
…
…
2. jako listy wartości ciągów. Na przykład:
{ }
{
}
,1.1, 0.2,2.1,3.0, 1.2,
x n
↑
⎡ ⎤
⎣ ⎦
=
−
−
…
…
gdzie strzałka oznacza próbkę o indeksie
n=0,
lub
1
0.2,
0
2.1, 1
3.0
x
x
x
⎡ ⎤
⎡ ⎤
⎡ ⎤
⎣ ⎦
⎣ ⎦
⎣ ⎦
− = −
=
=
…
…
U
Graficzna reprezentacja sygnału dyskretnego w czasie
U
:
MATLAB
c
lear;
n=-8:1:27;
x=0.2+sin(0.13*n);
plot(n,x);
grid
CPS 2
2006/2007
-10
-5
0
5
10
15
20
25
30
-1
-0.5
0
0.5
1
1.5
n
T
x[-3]=x
a
(-3T)
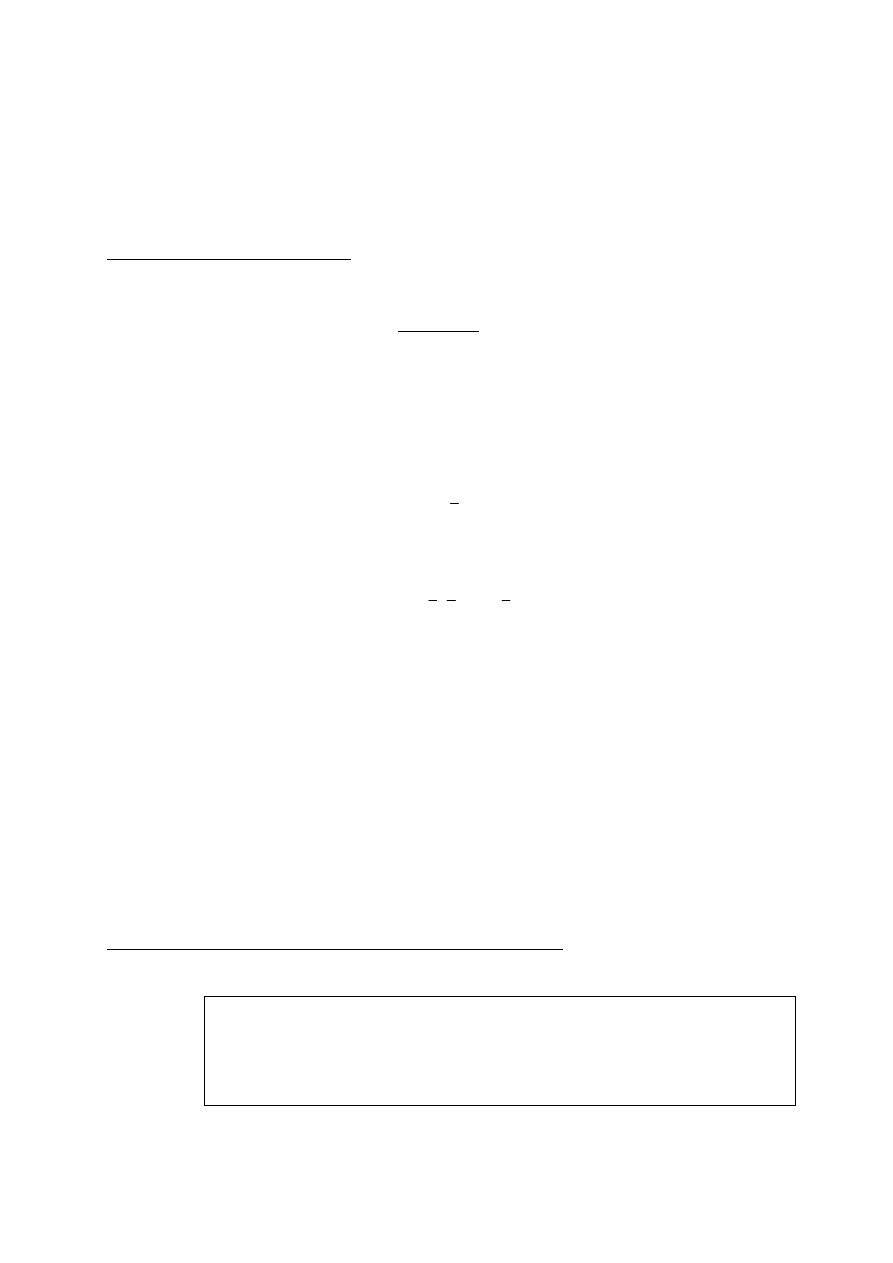
Sygnał dyskretny najczęściej otrzymuje się w wyniku
U
próbkowania w równych
odstępach czasu
U
sygnału ciągłego w czasie (analogowego).
Wtedy n-tą próbkę opisuje zależność:
( )
( )
,
, 2, 1,0,1,2,
p
p
a
a
t nT
x n
x t
x nT
n
=
⎡ ⎤
⎣ ⎦
=
=
=
− −
…
…
Odległość między kolejnymi próbkami (
T
B
p
B
) nazywa się
U
przedziałem
próbkowania
U
lub
U
okresem próbkowania
U
.
Odwrotność okresu próbkowania nosi nazwę
U
częstotliwości próbkowania
U
i
oznacza się jako
f
B
p
B
1
p
p
f
T
=
Klasyfikacja:
U
Rzeczywiste i zespolone sygnały:
Ze względu na typ wartości próbek sygnały dzielimy rzeczywiste i zespolone.
W
wielu aplikacjach cyfrowego przetwarzania sygnały zespolone mają duże
zastosowanie. Sygnały zespolone wyraża się jako sumę części rzeczywistej i
urojonej:
n
n
jy
z
x
n
⎡ ⎤
⎡ ⎤
⎡ ⎤
⎣ ⎦
⎣ ⎦
⎣ ⎦
+
=
CPS 3
2006/2007
lub w postaci wykładniczej:
( )
arg
j
z n
e
n
n
z
z
⎡ ⎤
⎣ ⎦
⎡ ⎤
⎡ ⎤
⎣ ⎦
⎣ ⎦
=
U
Deterministyczne i przypadkowe
Sygnały
U
deterministyczne
U
są sygnałami, których wartości są znane dla każdej
chwili czasu. Sygnały takie można zamodelować jako funkcje czasu. Sygnały
U
przypadkowe
U
posiadają przypadkowe wartości i muszą być opisywane
statystycznie. Program wykładu nie obejmuje klasy sygnałów przypadkowych.
U
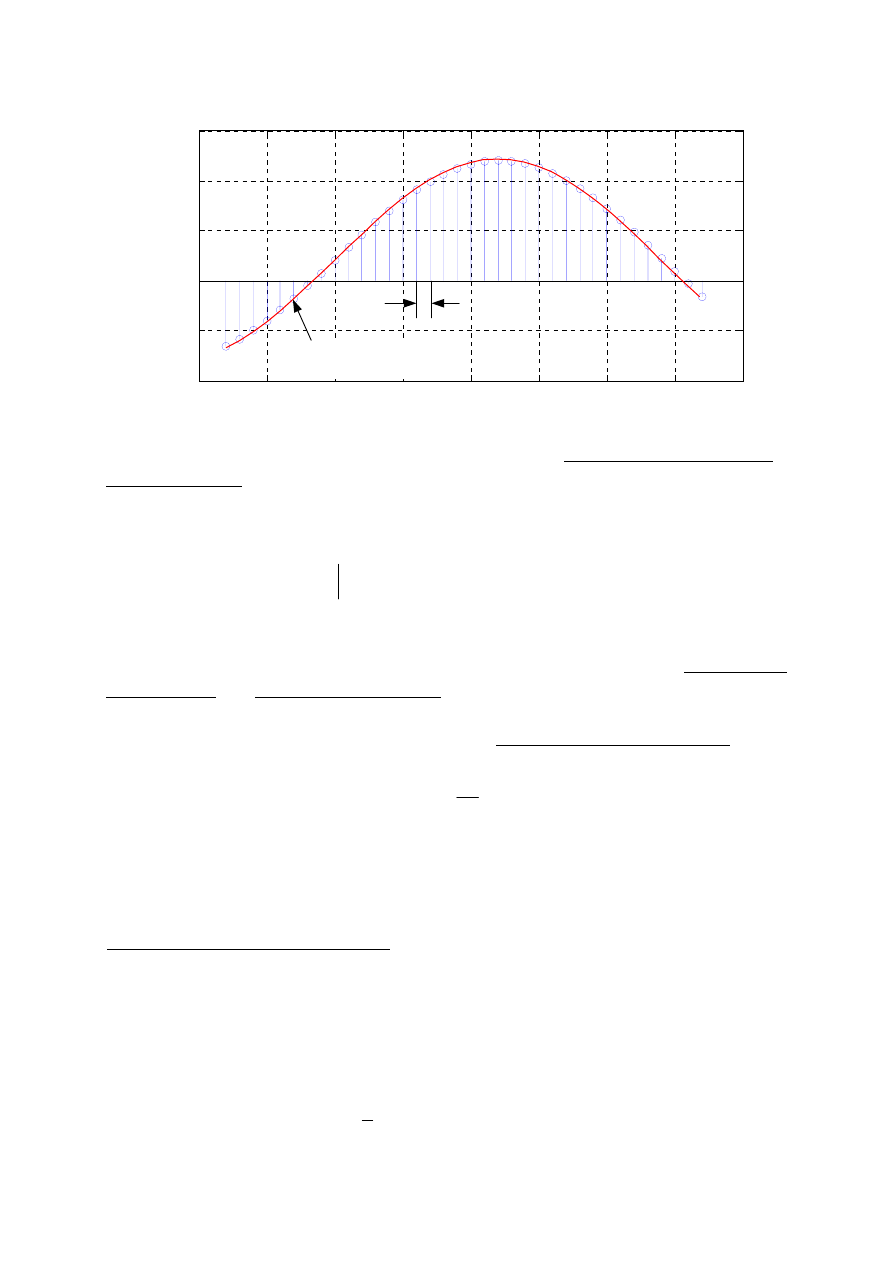
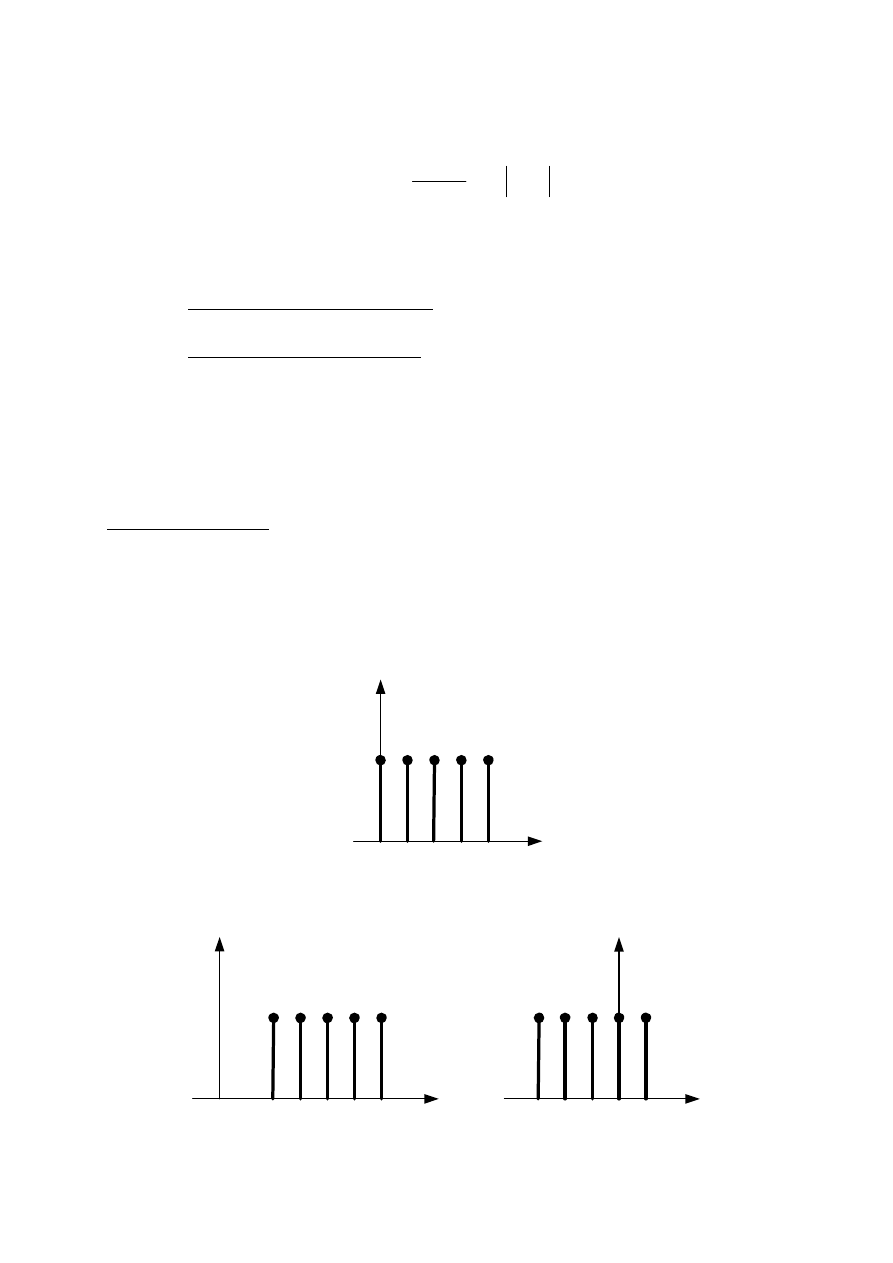
Parzyste i nieparzyste
Sygnał x[n] nazywa się
U
parzystym
U
jeżeli:
x
n
n
x
⎡
⎤
⎡ ⎤
⎣
⎦
⎣ ⎦
−
=
x[n]
n
0 1 2 3 4
-1
-2
-3
-4
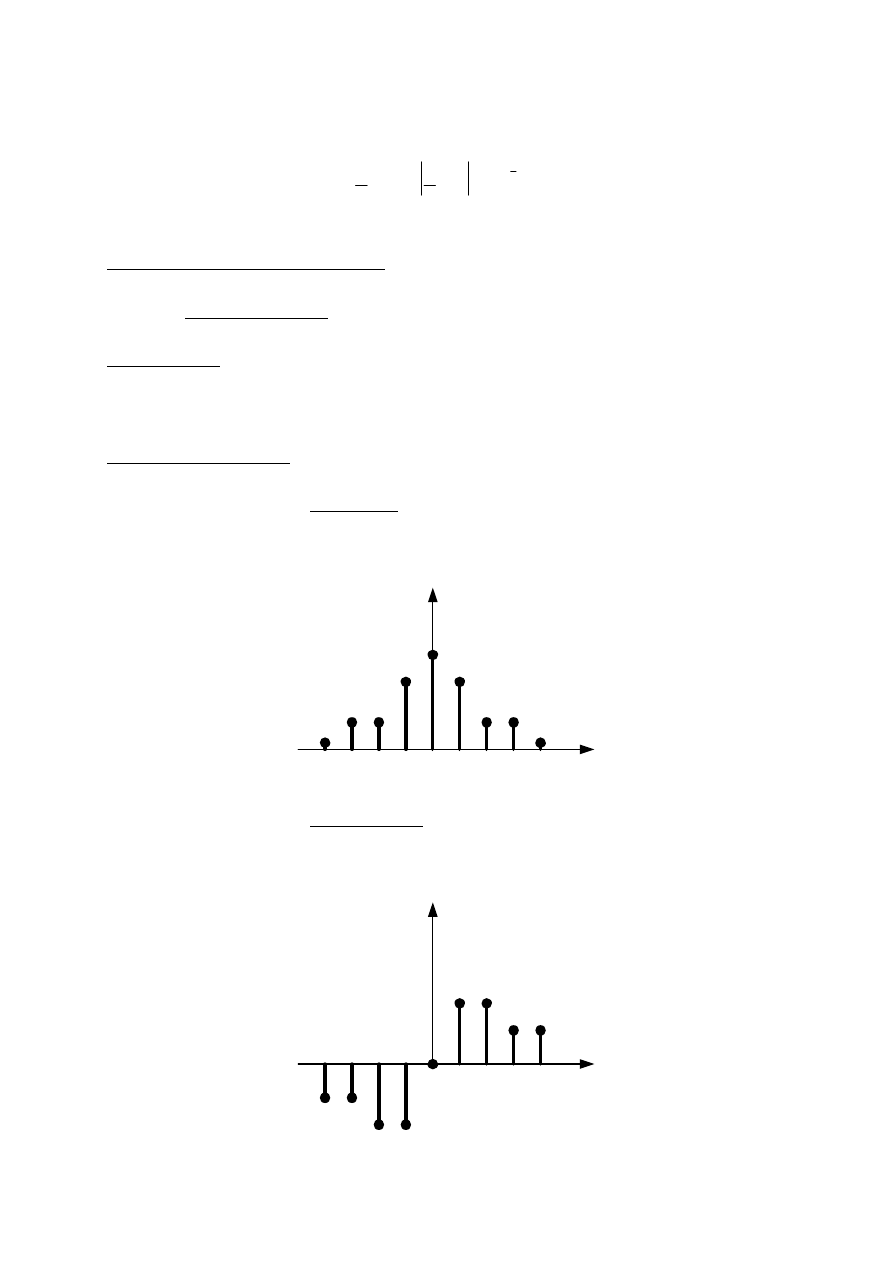
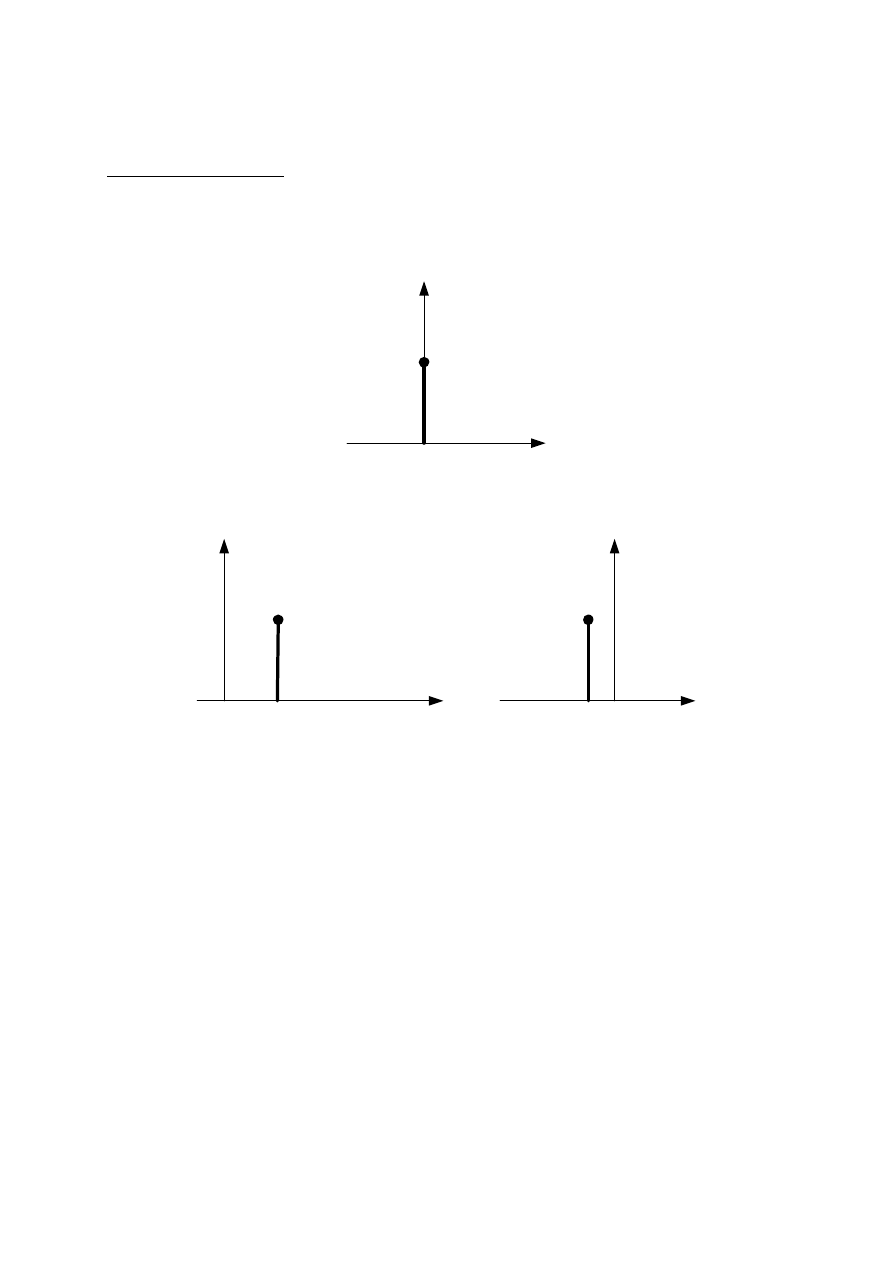
Sygnał x[n] nazywa się
U
nieparzystym
U
jeżeli:
x
n
n
x
⎡
⎤
⎡ ⎤
⎣
⎦
⎣ ⎦
−
= −
x[n]
n
0 1 2 3 4
-1
-2
-3
-4
CPS 4
2006/2007
U
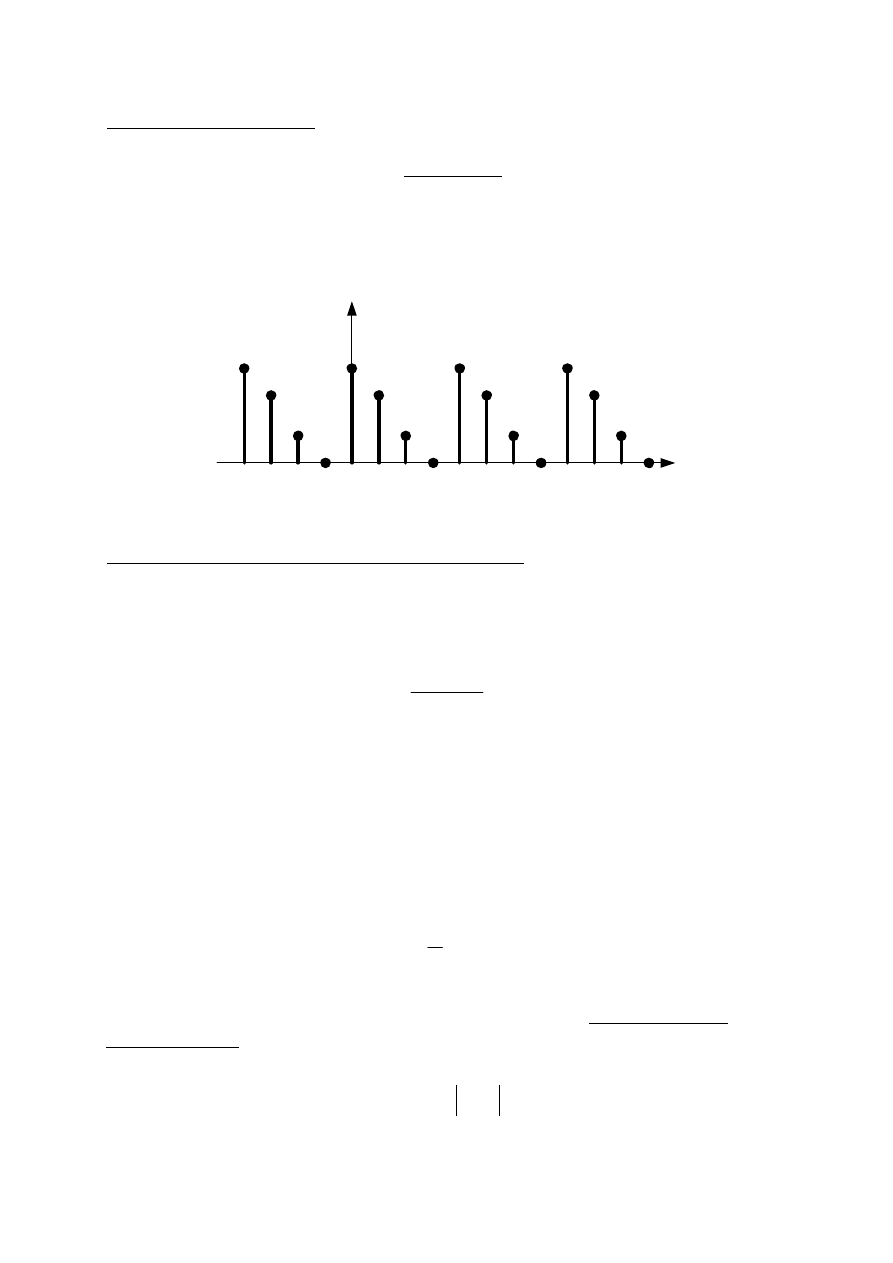
Okresowe i nieokresowe
Sygnał dyskretny x[n] nazywa się
U
okresowym
U
z okresem N (N jest dodatnią
liczbą całkowitą) jeżeli:
x
n N
n
x
⎡
⎤
⎡ ⎤
⎣ ⎦
⎣
⎦
+
=
dla wszystkich n
x[n]
0
N
-N
2N
n
U
Sygnały o skończonej energii i skończonej mocy:
Jeżeli prąd „i” płynący przez rezystor o wartości „R” wywołuje spadek napięcia
„u” to chwilowa moc na jednostkę rezystancji jest definiowana jako:
( ) ( ) ( )
( )
2
i t u t
p t
i t
R
⋅
=
=
Wtedy energia całkowita na jednostkę rezystancji wynosi:
( )
2
E
dt
i t
∞
−∞
= ∫
oraz średnia moc na jednostkę rezystancji wynosi:
( )
/ 2
/ 2
2
1
lim
T
T
T
P
d
T
i t
→∞
−
=
∫
t
Analogicznie, dla sygnału dyskretnego x[n] definiuje się
U
znormalizowaną
energię sygnału
U
jako:
2
n
E
x n
∞
=−∞
⎡ ⎤
⎣ ⎦
= ∑
CPS 5
2006/2007
oraz znormalizowaną moc średnią sygnału dyskretnego:
2
1
2
1
lim
N
n
N
N
P
x
N
=−
→−∞
n
⎡ ⎤
⎣ ⎦
+
=
∑
Bazując na tych definicjach sygnały dzieli się na:
-
U
sygnały o skończonej energii
U
, jeżeli
0 E
< ∞
<
oraz P=0;
-
U
sygnały o skończonej mocy
U
0 P
< ∞
<
oraz
E
∞
=
Podstawowe przebiegi dyskretne:
U
Skok jednostkowy:
[ ]
1,
0
1
0,
0
n
n
n
≥
⎧
= ⎨
<
⎩
1[n]
n
0 1 2 3 4
...
1
1[n-2]
n
0 1 2 3 4
...
5 6
1
1[-n+1]
n
0 1 2
-1
-2
...
1
CPS 6
2006/2007
U
Impuls jednostkowy:
[ ]
1,
0
0,
0
n
n
n
δ
=
⎧
= ⎨
≠
⎩
δ
[n]
n
0 1 2 3
-1
n
0 1 2 3 4 5 6
δ
[n-2]
n
0 1 2
-1
-2
δ
[n+1]
Z definicji skoku jednostkowego i impulsu jednostkowego wynikają następujące
zależności:
0
x n
n
x
n
δ
δ
⎡ ⎤
⎡ ⎤ ⎡ ⎤
⎡ ⎤
⎣ ⎦ ⎣ ⎦
⎣ ⎦
⎣ ⎦
=
x n
n k
x k
n k
δ
δ
⎡
⎤
⎡ ⎤ ⎡
⎡ ⎤
⎣ ⎦
⎤
⎣
⎦
⎣ ⎦ ⎣
⎦
−
=
−
oraz:
1
1
n
n
n 1
δ
⎡
⎤
⎡ ⎤
⎡ ⎤ −
⎣ ⎦
⎣ ⎦
⎣
⎦
=
−
1
n
k
n
k
δ
=−∞
⎡ ⎤
⎡ ⎤
⎣ ⎦
⎣ ⎦
=
∑
CPS 7
2006/2007
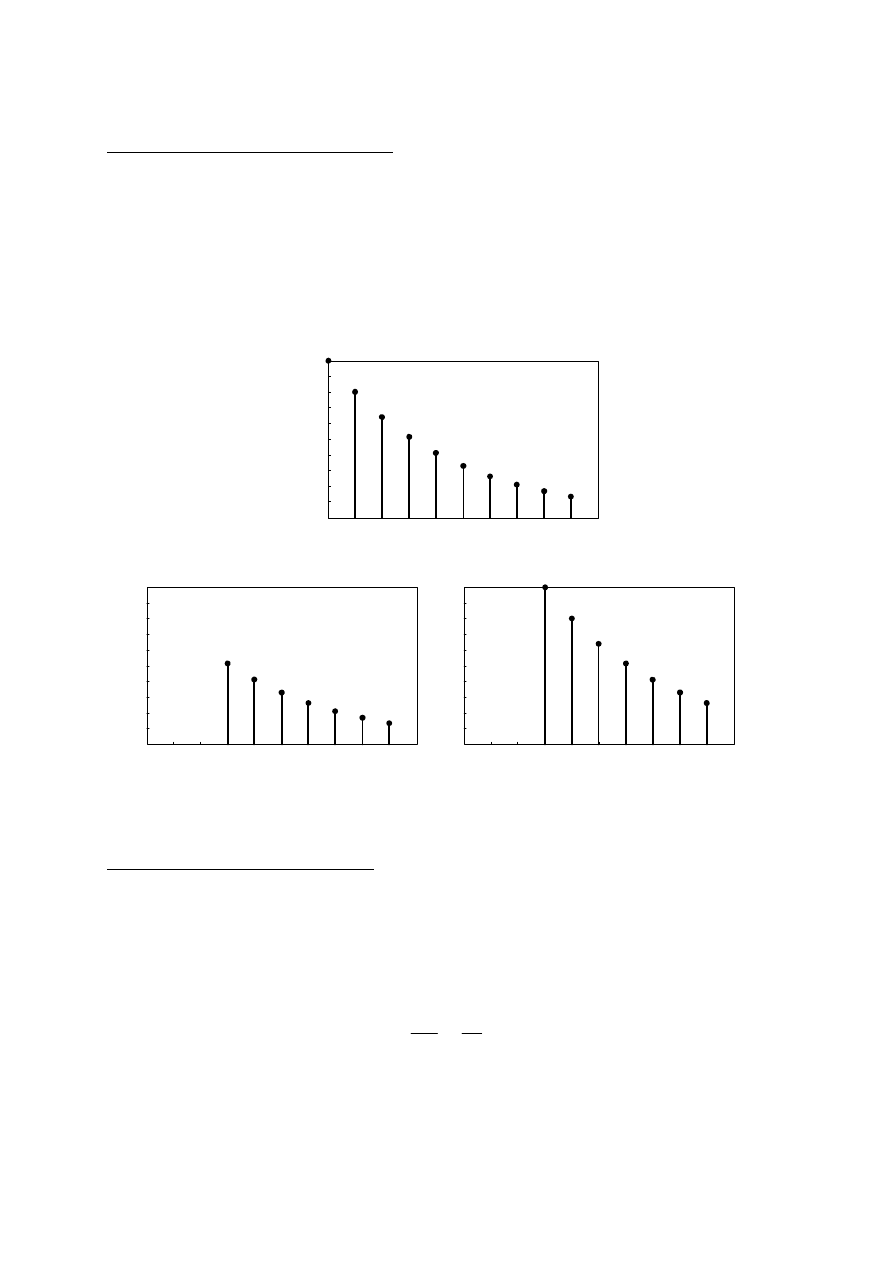
U
Rzeczywisty sygnał wykładniczy:
n
a
x n
⎡ ⎤
⎣ ⎦
=
dla
n
−∞ < < ∞
Często analizowane są sygnały wykładnicze jednostronne:
[ ]
[ ]
1
n
n
n
a
x
⋅
=
0 1 2 3 4 5 6 7 8 9
1
n
0.5
x[n]=(0.8)
n
1[n]
0 1 2 3 4 5 6 7 8 9
1
n
0.5
x[n]=(0.8)
n
1[n-3]
0 1 2 3 4 5 6 7 8 9
1
n
0.5
x[n]=(0.8)
(n-3)
1[n-3]
U
Zespolony sygnał wykładniczy:
0
j n
e
x n
ω
⎡ ⎤
⎣ ⎦
=
dla
n
−∞ < < ∞
Tak opisany sygnał jest okresowy z okresem N jeżeli spełniony jest warunek:
0
2
m
N
ω
π
=
gdzie m jest liczbą całkowitą dodatnią
CPS 8
2006/2007
Konwersja analogowo-cyfrowa:
Proces próbkowania opisuje się jako mnożenie sygnału analogowego f(t) i
nieskończonego szeregu impulsów (delt) Diraca d(t). Impulsy w takim szeregu
powtarzają się z okresem próbkowania T
B
p
B
.
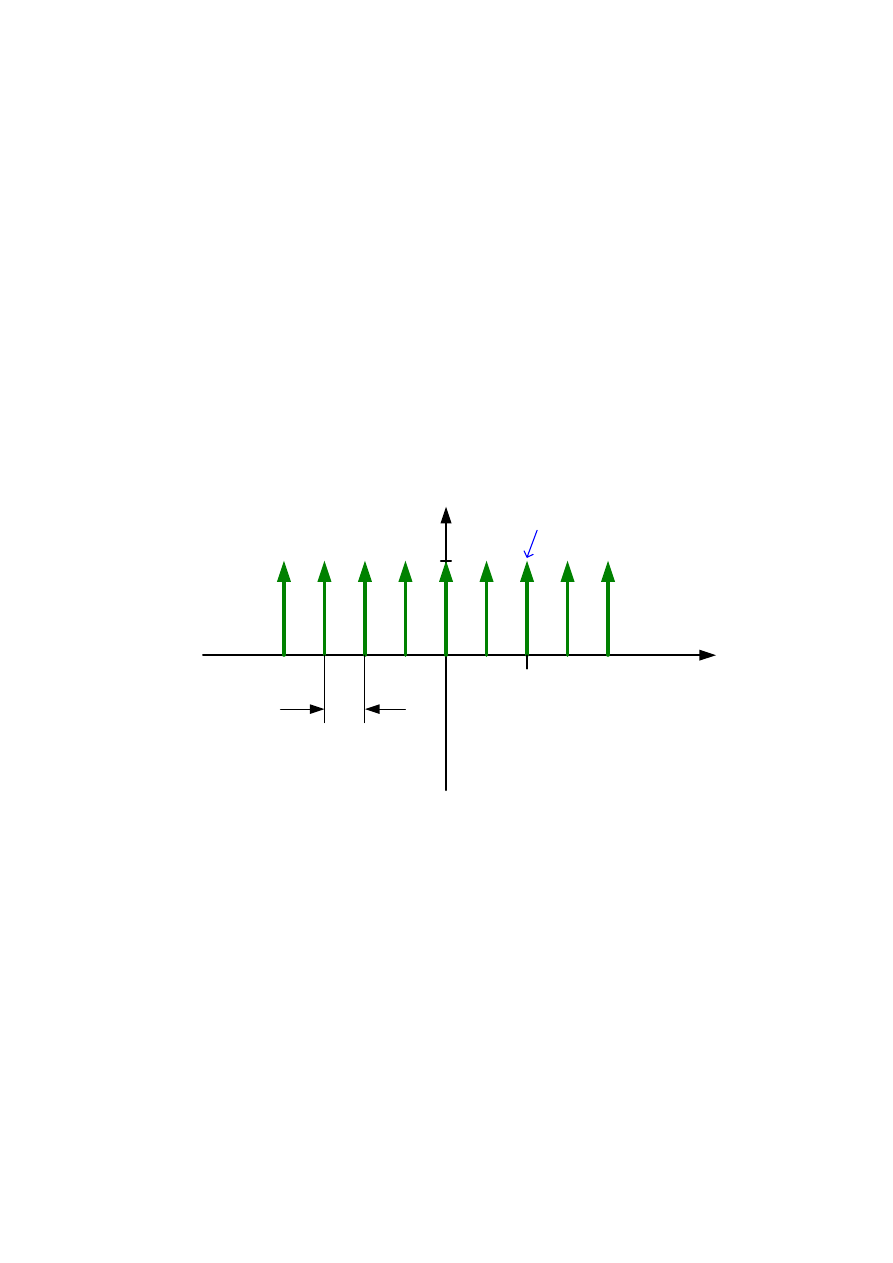
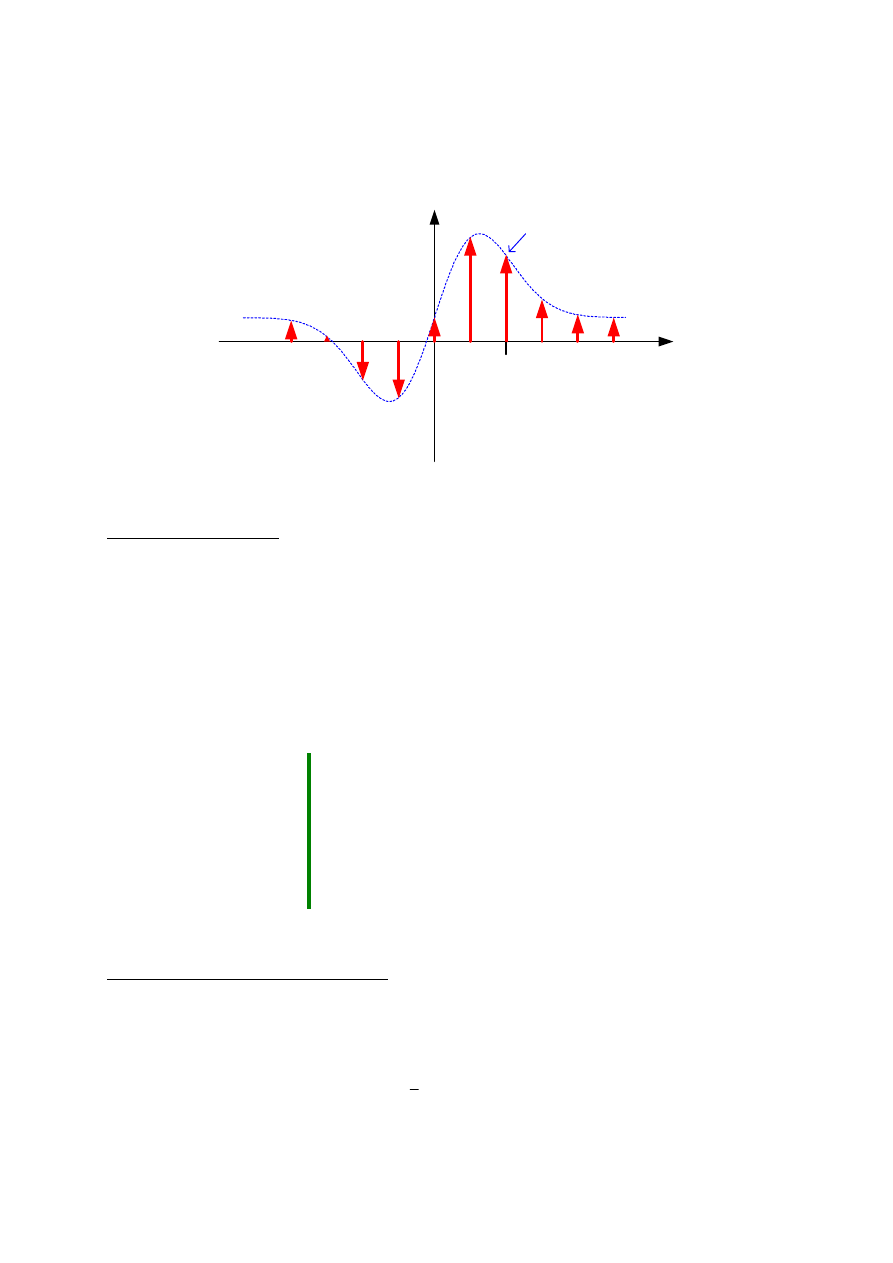
Szereg impulsów Diraca opisuje zależność:
( )
(
)
p
d t
t nT
δ
∞
−∞
=
−
∑
Na wykresie przedstawia się taki szereg w postaci strzałek o jednostkowej
długości ( jest to miara pola powierzchni delty), oddalonych od siebie o stały
przedział czasu równy Tp (okres próbkowania).
0
t
d(t)
1
T
p
(
)
p
nT
t
−
δ
p
nT
t
=
0
Oznaczając sygnał spróbkowany jako:
( )
( ) ( )
*
f
t
f t d t
=
⋅
( )
( )
(
)
*
p
f
t
f t
t nT
δ
∞
−∞
=
⋅
−
∑
i wykorzystując własność filtracyjną delty Diraca otrzymujemy wyrażenie
opisujące sygnał dyskretny:
( )
( ) (
*
p
p
)
f
t
f nT
t nT
δ
∞
−∞
=
⋅
−
∑
CPS 9
2006/2007
Zapis ten należy interpretować jako szereg impulsów Diraca o polach równych
wartościom próbkowanej funkcji analogowej w punktach, w których znajdują
się impulsy szeregu d(t).
0
t
f*(t)
( ) (
)
p
p
nT
t
nT
f
−
⋅
δ
p
nT
t
=
0
U
Widmo delty Diraca
U
zgodnie z definicją przekształcenia Fouriera wynosi:
( )
{ }
( )
1
j t
t
t e
dt
ω
δ
δ
∞
−
−∞
=
=
∫
F
( )
1
t
δ
⎯⎯→
F
Inne pary transformat Fouriera:
(
)
j T
t T
e
ω
δ
−
−
⎯⎯→
F
( )
1
2
πδ ω
⎯⎯→
F
(
)
0
0
2
j t
e
ω
πδ ω ω
⎯⎯→
−
F
U
Widmo przebiegu okresowego.
U
Do wyznaczenia wykorzystamy zespolony
szereg Fouriera
Przebieg okresowy f(t) w postaci zespolonego szeregu Fouriera ma postać
( )
0
jk t
k
k
f t
c e
ω
∞
=−∞
=
∑
CPS 10
2006/2007
Jego transformata Fouriera
( )
{
}
0
jk t
k
k
F j
c e
ω
ω
∞
=−∞
=
∑
F
( )
{ }
0
jk t
k
k
F j
c
e
ω
ω
∞
=−∞
=
∑
F
ostatecznie:
( )
(
0
2
k
k
F j
c
k
)
ω
π
δ ω
ω
∞
=−∞
=
∑
+
(**)
gdzie
( )
0
0
0
0
1
T
jk t
k
c
f t e
T
ω
−
=
∫
dt
współczynniki szeregu Fouriera
0
0
2
T
π
ω
=
odstęp między impulsami widma
t
ω
t
ω
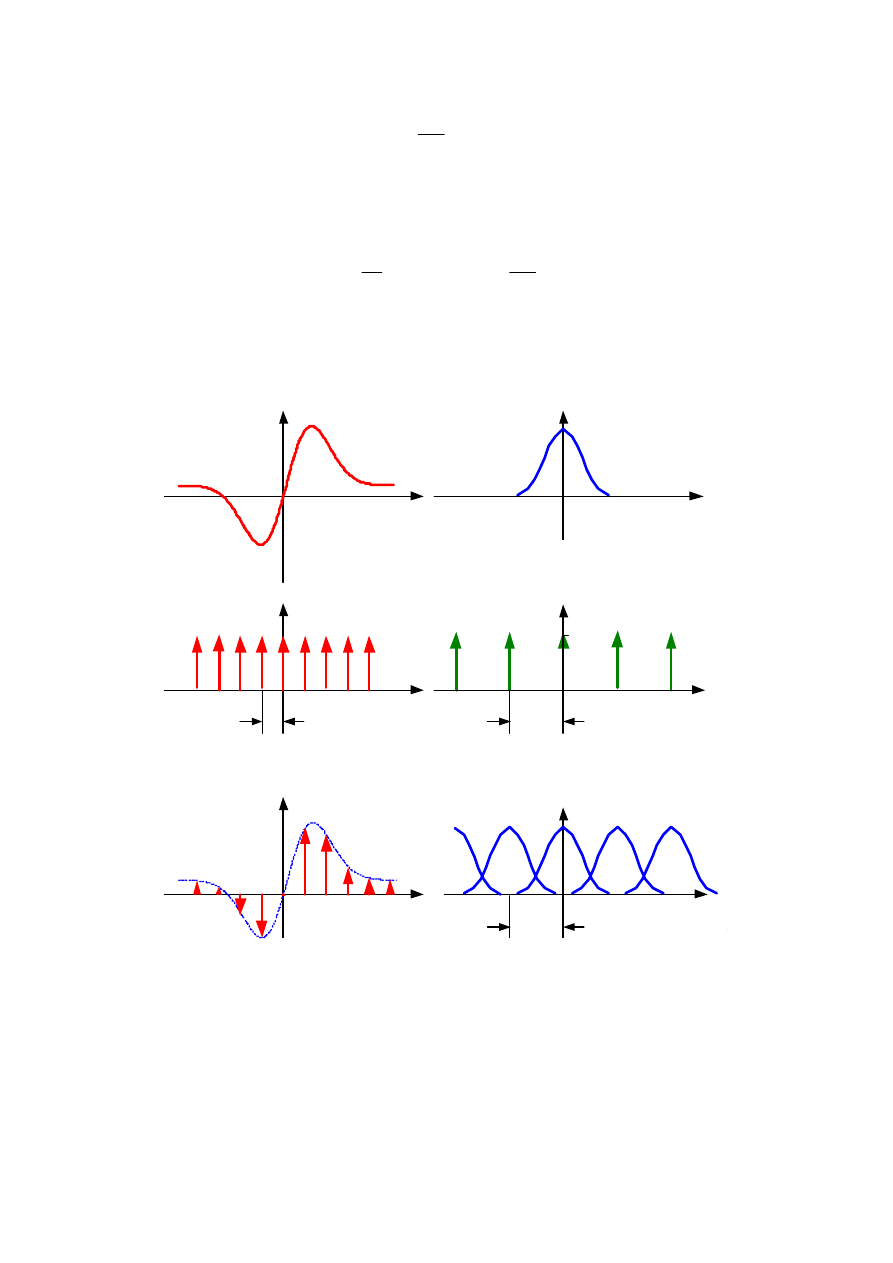
Wniosek:
Widmo dowolnego sygnału okresowego, opisuje szereg impulsów
Diraca oddalonych od siebie o stałą wartość
ω
B
0
B
i o polach równych odpowiednio
2
k
c
π
.
Sygnał okresowy posiada dyskretne widmo
.
Wykorzystując właściwość symetrii przekształcenia Fouriera można stwierdzić,
że
sygnał dyskretny posiada okresowe widmo
.
Ta właściwość charakterystyki widmowej sygnału dyskretnego, ma swoje
ważne konsekwencje w teorii próbkowania.
CPS 11
2006/2007
U
Szereg impulsów Diraca
U
rozpatrzymy jako szczególny przypadek przebiegu
okresowego
( )
(
)
p
k
d t
t kT
δ
∞
=−∞
=
−
∑
Po przedstawieniu
d(t)
w postaci szeregu Fouriera
( )
p
jk
t
k
k
d t
c e
ω
∞
=−∞
=
∑
współczynniki tego szeregu wynoszą
( )
/ 2
/ 2
1
1
p
p
p
T
j
kt
k
T
p
p
c
t e
d
T
T
ω
δ
−
−
=
=
∫
t
Stąd charakterystyka widmowa szeregu impulsów Diraca przyjmuje postać (**)
( )
2
2
k
p
p
D j
k
T
T
π
π
ω
δ ω
∞
=−∞
⎛
⎞
=
+
⎜
⎟
⎜
⎟
⎝
⎠
∑
Transformata Fouriera szeregu impulsów powtarzających się z okresem
T
B
p
B
(w dziedzinie czasu) jest również szeregiem impulsów powtarzających się z
okresem 2 /
p
T
π
(w dziedzinie częstotliwości).
Zmniejszając odstępy między impulsami w dziedzinie czasu ( większa
częstotliwość próbkowania ) zwiększają się odstępy miedzy impulsami w
dziedzinie częstotliwości (i odwrotnie). Ta prosta zależność ma fundamentalne
znaczenie podczas realizacji zadania próbkowania przebiegów analogowych.
{
U
Obliczenia widma sygnału dyskretnego
U
( )
}
f * t
F
Analiza sygnałów w dziedzinie częstotliwości pozwala lepiej rozumieć
zagadnienia przetwarzania sygnałów.
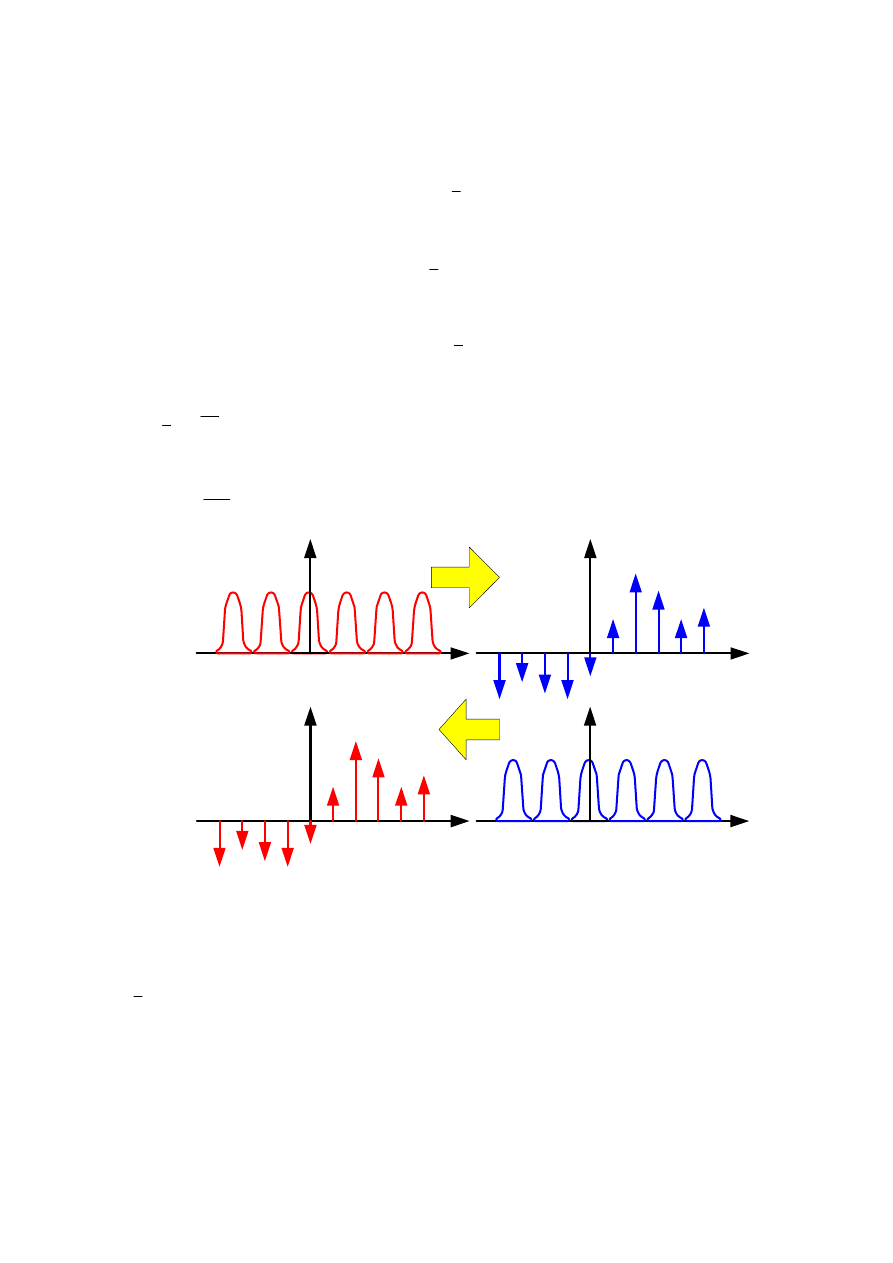
Transformata Fouriera iloczynu dwóch przebiegów ( twierdzenie o splocie z
dziedzinie częstotliwości ):
( ) ( )
{
}
( )
{
}
( )
{ }
1
2
f t d t
f t
d t
π
⋅
=
∗
F
F
F
( )
{
}
( )
{
}
( )
{ }
1
*
2
f
t
f t
π
=
∗
F
F
F d t
CPS 12
2006/2007
W uproszczonej postaci zapiszemy transformatę Fouriera sygnału dyskretnego
jako
( )
( )
( )
1
*
2
F
j
F j
D j
ω
ω
ω
π
=
∗
oraz znając transformatę szeregu impulsów Diraca otrzymamy:
( )
( )
1
2
*
k
p
p
F
j
F j
k
T
T
π
ω
ω
δ ω
∞
=−∞
⎛
⎞
=
∗
+
⎜
⎟
⎜
⎟
⎝
⎠
∑
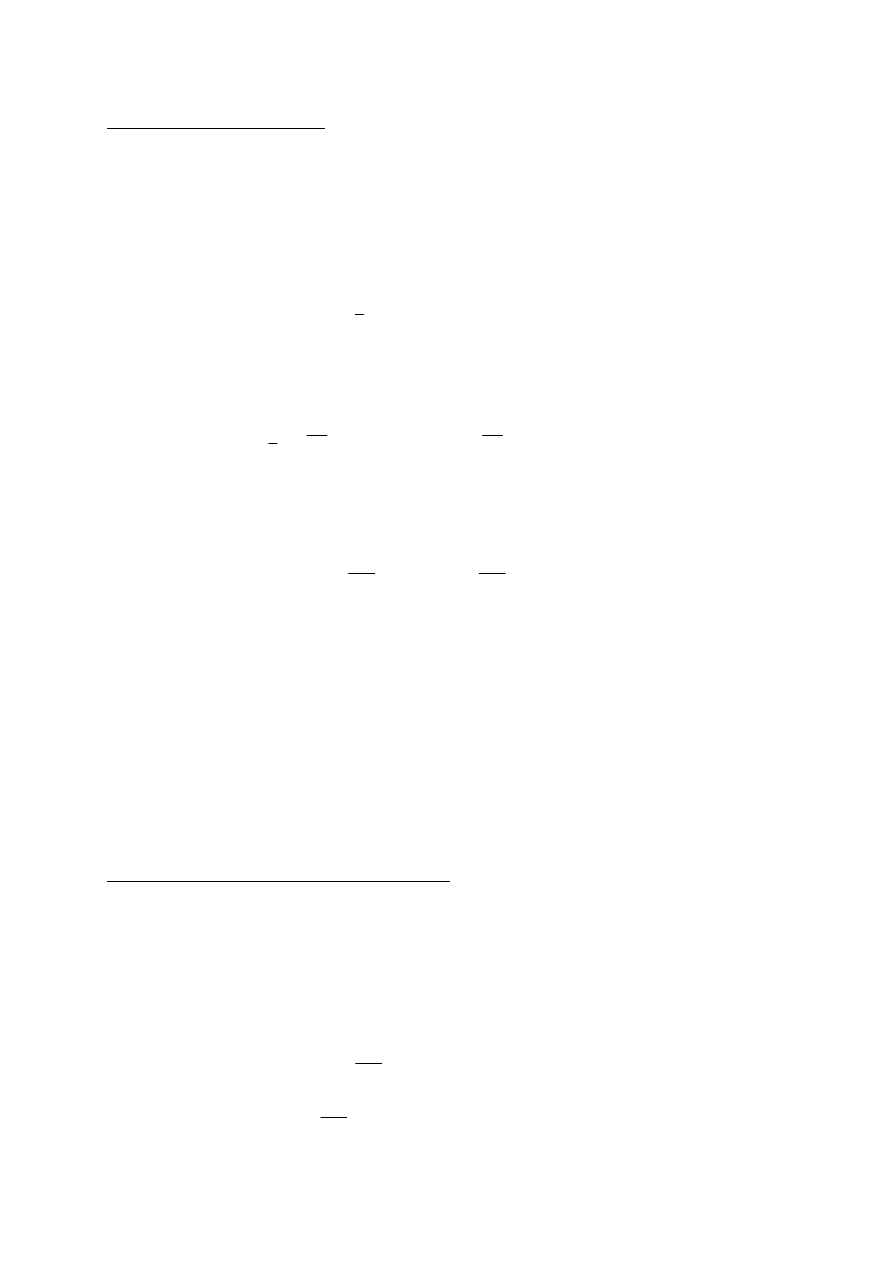
Pamiętamy, że splot funkcji z impulsem Diraca powoduje przesunięcie tej
funkcji do punktu, w którym znajduje się delta.
( ) (
)
(
)
0
0
T
T
f t
t t
f t t
δ
∗
−
=
−
( )
t
f
T
t
A
0
T
(
)
0
t
t
−
δ
0
t
przesunięcie
(
)
0
t
t
f
T
−
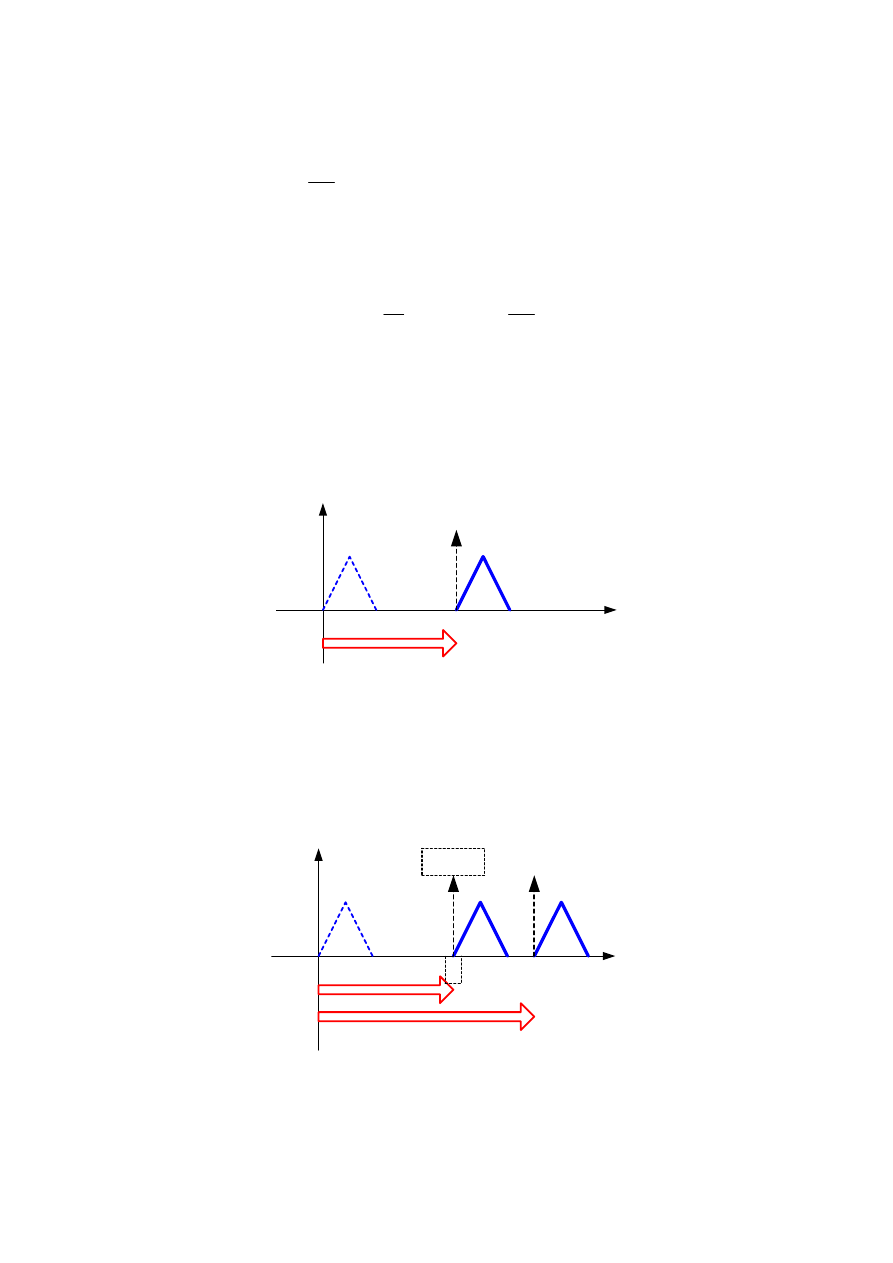
Dodatkowo jeżeli funkcja splatana jest z szeregiem impulsów, to następuje
powielanie tej funkcji i przesuwanie powieleń do miejsc, w których znajdują się
impulsy Diraca.
( ) (
) (
)
(
)
(
)
(
)
1
0
1
0
t
t
f
t
t
f
t
t
t
t
t
f
T
T
T
−
+
−
=
−
+
−
∗
δ
δ
t
A
0
T
(
)
0
t
t
−
δ
0
t
(
)
1
t
t
−
δ
1
t
przesunięcie i powielenie
(
)
0
t
t
f
T
−
(
)
1
t
t
f
T
−
( )
t
f
T
Wnioskujemy zatem, że widmo sygnału dyskretnego powstaje w wyniku
powielania widma sygnału analogowego nieskończoną ilość razy i przesuwania
tych powieleń o wielokrotności
ω
B
p.
CPS 13
2006/2007
2
p
p
T
π
ω
=
Transformata Fouriera sygnału dyskretnego ma zatem następującą postać:
( )
1
2
*
k
p
p
F
j
F j
jk
T
T
π
ω
ω
∞
=−∞
⎛
⎞
=
+
⎜
⎟
⎜
⎟
⎝
⎠
∑
Operację próbkowania sygnału analogowego f(t) można przedstawić graficznie
w postaci wykresów w dziedzinie czasu i częstotliwości.
0
t
f*(t)
0
t
f(t)
0
0
t
d(t)
1
T
p
ω
0
D(
ω
)
ω
p
ω
0
F*(
ω
)
2
π
ω
p
ω
ω
F( )
Jak wynika z wyprowadzeń postać widma sygnału dyskretnego zależy od
częstotliwości próbkowania.
W niektórych wypadkach w wyniku powieleń i przesunięć widma sygnału
analogowego, może występować nakładanie się powieleń.
CPS 14
2006/2007
SYSTEMY DYSKRETNE
Definicja:
W systemie dyskretnym, przetwarzanie obejmuje operacje arytmetyczne
przeprowadzane na sygnale wejściowym x[n], w wyniku, których na wyjściu
systemu otrzymuje się sygnał wyjściowy y[n] w postaci ciągu liczb.
W większości przypadków systemy czasu dyskretnego są systemami o jednym
wejściu i jednym wyjściu.
System dyskretny
x[n]
y[n]
Sygnał
wejściowy
Sygnał
wyjściowy
Systemy dyskretne można opisywać, podobnie jak układy analogowe, w
konwencji wejście-wyjście, do opisu stosuje się w tym przypadku
U
równania
różnicowe
U
, stanowiące algebraiczną zależność między ciągiem wejściowym i
wyjściowym.
Klasyfikacja:
Systemy dyskretne można klasyfikować ze względu następujących własności:
Liniowość
Stacjonarność
Pamięć
Przyczynowość
Stabilność
Pasywność
CPS 15
2006/2007
U
Liniowość:
U
Definicja: Jeżeli
[ ]
1
y n
jest sygnałem wyjściowym systemu zależnym od sygnału
wejściowego
[ ]
1
x n
oraz
[ ]
2
y n
jest sygnałem wyjściowym dla sygnału
wejściowego
[ ]
2
x n
to dla sygnału wejściowego:
1
2
x n
x n
x n
α
β
⎡ ⎤
⎡ ⎤
⎡ ⎤
⎣ ⎦
⎣ ⎦
⎣ ⎦
=
+
na wyjściu systemu otrzymamy
[ ]
[ ]
[ ]
1
2
y n
y n
y n
α
β
=
+
Zależność powyższa zachodzi dla dowolnie wybranych stałych
,
α β
oraz
dowolnych sygnałów wejściowych
[ ]
1
x n ,
[ ]
2
x n
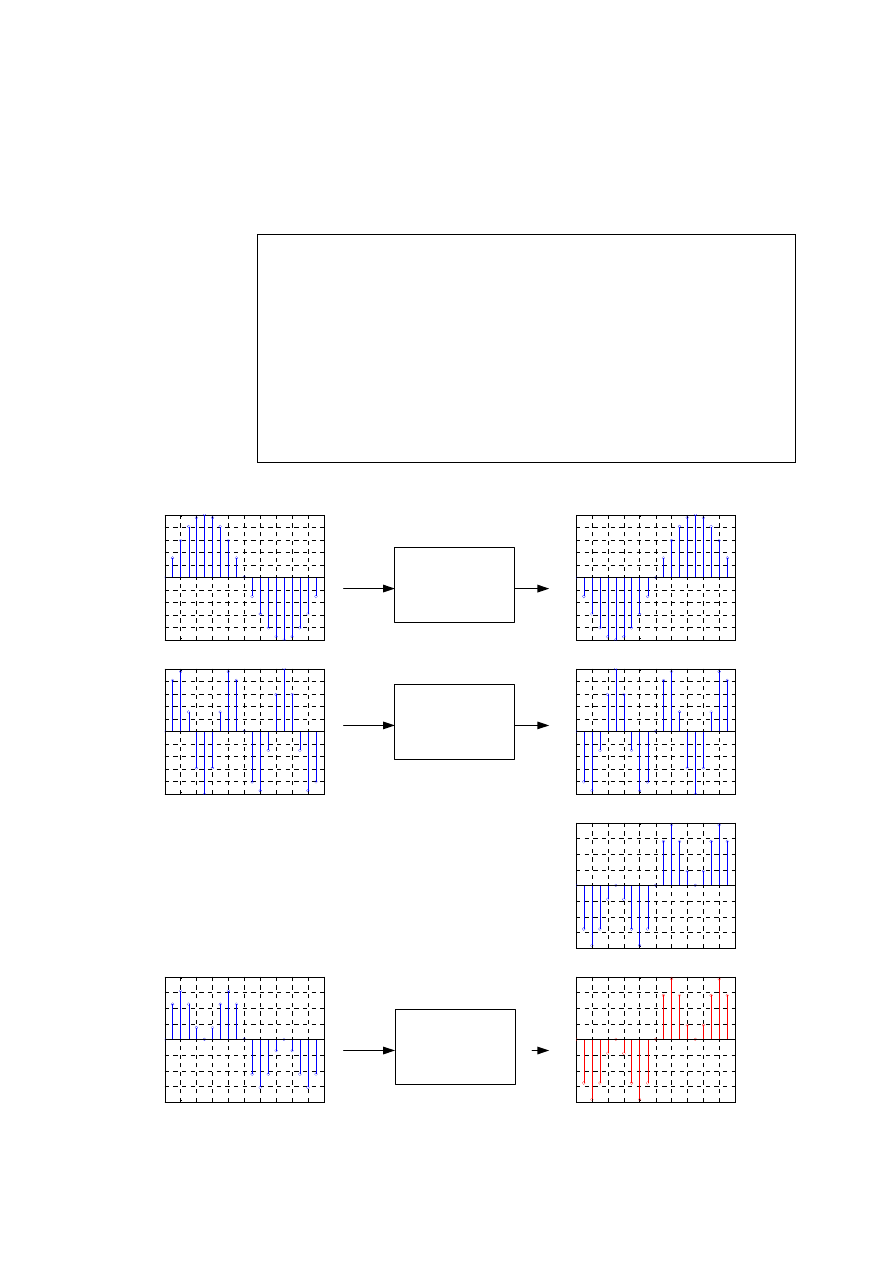
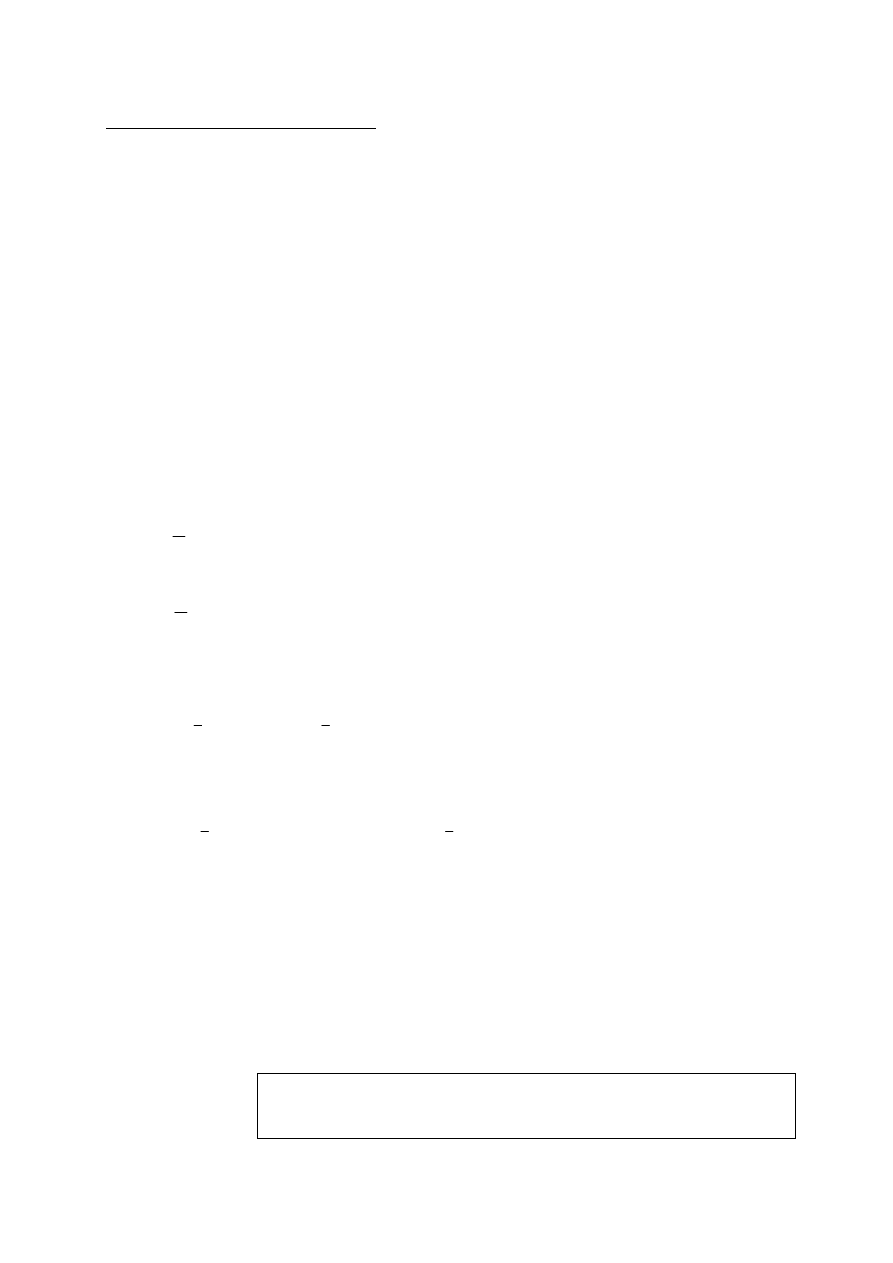
Przykład systemu liniowego:
[ ]
[ ]
2
x n
y n
= −
[ ]
1
sin(
)
p
x n
nT
ω
=
o częstotliwości f=1Hz próbkowany z f
B
p
B
=20Hz
[ ]
2
sin(3
)
p
x n
nT
ω
=
o częstotliwości f=3Hz próbkowany z f
B
p
B
=20Hz
Superpozycja sygnałów wejściowych
[ ]
[ ]
[ ]
1
2
sin(
) sin(3
)
p
p
x n
x n
x n
nT
nT
ω
ω
=
+
=
+
Na wyjściu systemu dla kolejnych sygnałów wejściowych otrzymamy:
[ ]
1
2
1
sin(
)
p
y n
nT
ω
= −
[ ]
1
2
2
sin(3
)
p
y n
nT
ω
= −
[ ]
[ ]
[ ]
1
1
2
2
1
2
sin(
)
sin(3
)
p
p
y n
y n
y n
nT
nT
ω
ω
=
+
= −
−
oraz inaczej
[ ]
[ ]
[ ]
(
)
(
)
1
1
2
2
0
1
2
sin(
) sin(3
)
p
p
y n
x n
x n
nT
nT
ω
ω
= −
+
= −
+
CPS 16
2006/2007
Dla sygnału liniowego zachodzi równość:
[ ]
[ ]
0
y n
y n
=
MATLAB
clear;
fp=20; T=1/fp; f=1;
omega=2*pi*f;
t=0:T:1-T;
x1=sin(omega*t); figure(1); stem(t,x1); grid
y1=-x1/2; figure(2); stem(t,y1); grid
x2=sin(3*omega*t); figure(3); stem(t,x2); grid
y2=-x2/2; figure(4); stem(t,y2); grid
x=x1+x2; figure(5); stem(t,x); grid
y=y1+y2; figure(6); stem(t,y); grid
yy=-x/2; figure(7); stem(t,yy,'-r'); grid
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
x
1
[n]
y
1
[n]
x
2
[n]
y
2
[n]
x[n]=x
1
[n]+x
2
[n]
y
1
[n]+y
2
[n]
y[n]
system
system
system
CPS 17
2006/2007
Przykład systemu nieliniowego:
[ ]
[ ]
(
)
2
y n
x n
=
[ ]
1
sin(
)
p
x n
nT
ω
=
o częstotliwości f=1Hz próbkowany z f
B
p
B
=20Hz
[ ]
2
sin(3
)
p
x n
nT
ω
=
o częstotliwości f=3Hz próbkowany z f
B
p
B
=20Hz
Superpozycja sygnałów wejściowych
[ ]
[ ]
[ ]
1
2
sin(
) sin(3
)
p
p
x n
x n
x n
nT
nT
ω
ω
=
+
=
+
Na wyjściu systemu otrzymamy:
[ ]
1
1
1 cos(2
)
2
p
y n
nT
ω
⎡
⎤
=
−
⎣
⎦
[ ]
2
1
1 cos(6
)
2
p
y n
nT
ω
⎡
⎤
=
−
⎣
⎦
Sygnał jako suma sygnałów wyjściowych
[ ]
1
1
2
2
1
cos(2
)
cos(6
)
p
p
y n
nT
nT
ω
ω
= −
−
oraz jako sygnał wyjściowy sumy sygnałów wejściowych
[ ]
1
1
2
2
0
1
cos(2
) cos(4
)
cos(6
)
p
p
y n
nT
nT
nT
p
ω
ω
ω
= +
−
−
Nierówność
[ ]
[ ]
0
y n
y n
≠
wskazuje na nieliniowość systemu
MATLAB
clear;
fp=20; T=1/fp; f=1;
omega=2*pi*f;
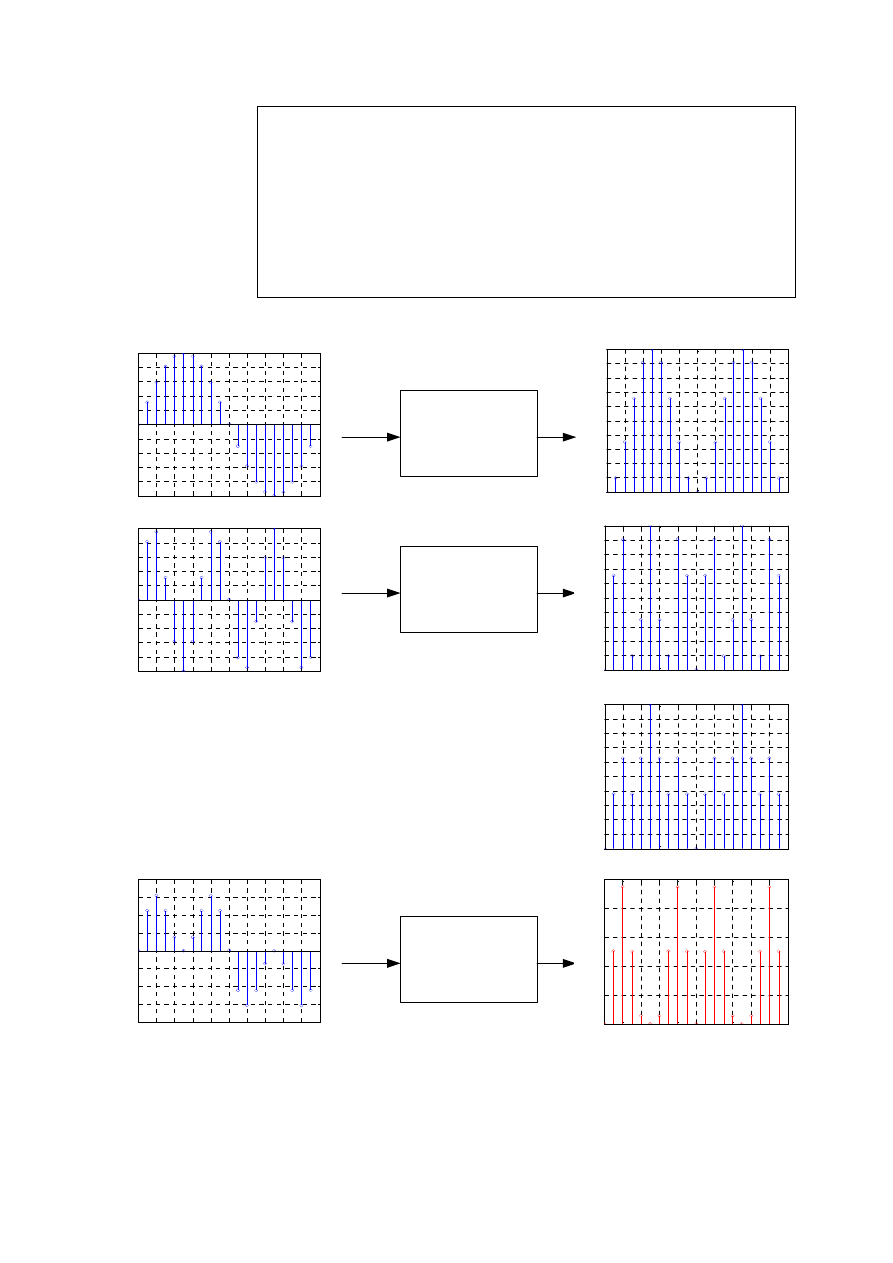
CPS 18
2006/2007
t=0:T:1-T;
x1=sin(omega*t); figure(1); stem(t,x1); grid
y1=x1.^2; figure(2); stem(t,y1); grid
x2=sin(3*omega*t); figure(3); stem(t,x2); grid
y2=x2.^2; figure(4); stem(t,y2); grid
x=x1+x2; figure(5); stem(t,x); grid
y=y1+y2; figure(6); stem(t,y); grid
yy=x.^2; figure(7); stem(t,yy,'-r'); grid
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
x
1
[n]
x
2
[n]
x[n]=x
1
[n]+x
2
[n]
system
system
system
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
y
2
[n]
y
1
[n]
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
y
1
[n]+y
2
[n]
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0
0.5
1
1.5
2
2.5
y[n]
CPS 19
2006/2007
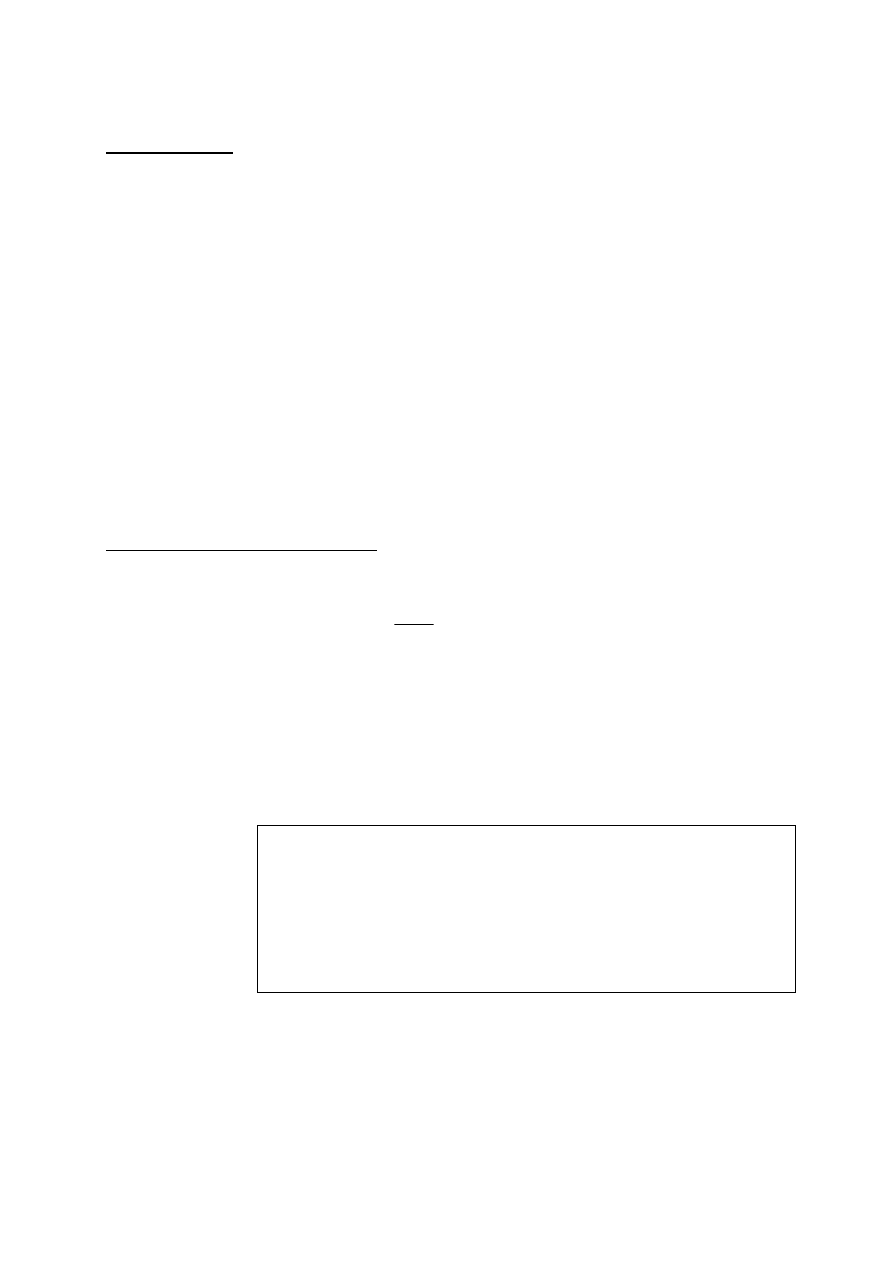
Stacjonarność
W systemie stacjonarnym przesunięcie w czasie w ciągu wejściowym powoduje
równoważne przesunięcie w ciągu wyjściowym
Jeżeli na wymuszenie x odpowiedź wynosi y
[ ]
[ ]
system
x n
y n
⎯⎯⎯
→
to na wymuszenie x przesunięte w czasie o k próbek układ odpowie sygnałem y
tak samo przesuniętym
[
]
[
]
system
x n k
y n k
− ⎯⎯⎯
→
−
Przykład systemu stacjonarnego
[ ]
[ ]
2
x n
y n
= −
[ ]
[
]
[ ]
[
]
2
2
n 4
n 4
system
x n
x
y n
y
=
+ ⎯⎯⎯
→
=
+
MATLAB
clear;
fp=20; T=1/fp; f=1;
omega=2*pi*f;
t=0:T:1-T;
x1=sin(omega*t); figure(1); stem(x1); grid
y1=-x1/2; figure(2); stem(y1); grid
x2=x1(5:20);figure(3); stem(x2); grid
y2=-x2/2; figure(4); stem(y2); grid
CPS 20
2006/2007
0
2
4
6
8
10
12
14
16
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
0
2
4
6
8
10
12
14
16
18
20
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
0
2
4
6
8
10
12
14
16
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
0
2
4
6
8
10
12
14
16
18
20
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
x
1
[n]
x
2
[n]
system
system
y
2
[n]
y
1
[n]
Pamięć:
W układach bez pamięci odpowiedź systemu y[n] zależy tylko od teraźniejszych
wartości wymuszenia x[n].
Przyczynowość
:
Odpowiedź systemu przyczynowego y[n] zależy tylko od przeszłych i
teraźniejszych wartości sygnału wymuszenia x[n].
Stabilność:
Układ jest stabilny w sensie BIBO (bounded input, bounded output), jeżeli przy
ograniczonym sygnale wejściowym x[n] sygnał wyjściowy y[n] jest także
ograniczony. Formalnie można warunek zapisać:
[ ]
[ ]
x
y
x n
M
y n
M
≤
< ∞ ⇒
≤
< ∞
Pasywność:
System dyskretny jest pasywny jeżeli dla każdego sygnału wejściowego x[n] o
skończonej energii sygnał wyjściowy y[n] posiada energię mniejszą lub równą
energii x[n].
[ ]
[ ]
2
2
k
k
y k
x k
∞
∞
=−∞
=−∞
≤
< ∞
∑
∑
Document Outline
- oraz średnia moc na jednostkę rezystancji wynosi:
- Konwersja analogowo-cyfrowa:
- Proces próbkowania opisuje się jako mnożenie sygnału analogowego f(t) i nieskończonego szeregu impulsów (delt) Diraca d(t). Impulsy w takim szeregu powtarzają się z okresem próbkowania Tp.
- Szereg impulsów Diraca opisuje zależność:
- Na wykresie przedstawia się taki szereg w postaci strzałek o jednostkowej długości ( jest to miara pola powierzchni delty), oddalonych od siebie o stały przedział czasu równy Tp (okres próbkowania).
- i wykorzystując własność filtracyjną delty Diraca otrzymujemy wyrażenie opisujące sygnał dyskretny:
- Zapis ten należy interpretować jako szereg impulsów Diraca o polach równych wartościom próbkowanej funkcji analogowej w punktach, w których znajdują się impulsy szeregu d(t).
- Widmo delty Diraca zgodnie z definicją przekształcenia Fouriera wynosi:
- Inne pary transformat Fouriera:
- Widmo przebiegu okresowego. Do wyznaczenia wykorzystamy zespolony szereg Fouriera
- Przebieg okresowy f(t) w postaci zespolonego szeregu Fouriera ma postać
- Jego transformata Fouriera
- ostatecznie:
- (**)
- gdzie
- współczynniki szeregu Fouriera
- odstęp między impulsami widma
- Wniosek: Widmo dowolnego sygnału okresowego, opisuje szereg impulsów Diraca oddalonych od siebie o stałą wartość (0 i o polach równych odpowiednio . Sygnał okresowy posiada dyskretne widmo.
- Wykorzystując właściwość symetrii przekształcenia Fouriera można stwierdzić, że sygnał dyskretny posiada okresowe widmo.
- Ta właściwość charakterystyki widmowej sygnału dyskretnego, ma swoje ważne konsekwencje w teorii próbkowania.
- Szereg impulsów Diraca rozpatrzymy jako szczególny przypadek przebiegu okresowego
- Po przedstawieniu d(t) w postaci szeregu Fouriera
- współczynniki tego szeregu wynoszą
- Stąd charakterystyka widmowa szeregu impulsów Diraca przyjmuje postać (**)
- Transformata Fouriera szeregu impulsów powtarzających się z okresem Tp (w dziedzinie czasu) jest również szeregiem impulsów powtarzających się z okresem (w dziedzinie częstotliwości).
- Zmniejszając odstępy między impulsami w dziedzinie czasu ( większa częstotliwość próbkowania ) zwiększają się odstępy miedzy impulsami w dziedzinie częstotliwości (i odwrotnie). Ta prosta zależność ma fundamentalne znaczenie podczas realizacji zadania próbkowania przebiegów analogowych.
- Obliczenia widma sygnału dyskretnego
- Analiza sygnałów w dziedzinie częstotliwości pozwala lepiej rozumieć zagadnienia przetwarzania sygnałów.
- Transformata Fouriera iloczynu dwóch przebiegów ( twierdzenie o splocie z dziedzinie częstotliwości ):
- W uproszczonej postaci zapiszemy transformatę Fouriera sygnału dyskretnego jako
- oraz znając transformatę szeregu impulsów Diraca otrzymamy:
- Pamiętamy, że splot funkcji z impulsem Diraca powoduje przesunięcie tej funkcji do punktu, w którym znajduje się delta.
- Dodatkowo jeżeli funkcja splatana jest z szeregiem impulsów, to następuje powielanie tej funkcji i przesuwanie powieleń do miejsc, w których znajdują się impulsy Diraca.
- Wnioskujemy zatem, że widmo sygnału dyskretnego powstaje w wyniku powielania widma sygnału analogowego nieskończoną ilość razy i przesuwania tych powieleń o wielokrotności (p.
- Transformata Fouriera sygnału dyskretnego ma zatem następującą postać:
- Operację próbkowania sygnału analogowego f(t) można przedstawić graficznie w postaci wykresów w dziedzinie czasu i częstotliwości.
- Jak wynika z wyprowadzeń postać widma sygnału dyskretnego zależy od częstotliwości próbkowania.
- W niektórych wypadkach w wyniku powieleń i przesunięć widma sygnału analogowego, może występować nakładanie się powieleń.
Wyszukiwarka
Podobne podstrony:
W01(Patomorfologia) II Lek
5 Algorytmy wyznaczania dyskretnej transformaty Fouriera (CPS)
w01
IMW W01 Wstepny System produkc Nieznany
cps recenzja re0205
cps w04 v9
FPA W01 v1 0
bal w01
BD 2st 1 2 w01 tresc 1 1 (2)
cps d1u 1600 48 hx
MB W01 PWr
AM23 w01 Całki niewłaściwe pierwszego rodzaju
PA W01 Wprowadzenie
temat cw3, Informatyka, semestr 5, CPS, lab3
ISCW V10 Vol2
Gazownictwo w01
więcej podobnych podstron