
Mirosław Tomera
Katedra Automatyki Okrętowej
Wydział Elektryczny
Akademia Morska w Gdyni
http://vega.am.gdynia.pl/~tomera/
Podstawy Automatyki
Wprowadzenie
22 luty 2014 r.

Plan wykładu
• Literatura
• Układ dwóch zbiorników połączonych kaskadowo
• Modelowanie matematyczne elementów składowych
– charakterystyka pompy
– dynamiki zbiorników
– charakterystyki czujników
• Nieliniowe równania dynamiczne opisujące dynamikę układu kaskadowego
• Linearyzacja modelu nieliniowego
• Wyznaczenie transmitancji obiektu
• Synteza sterowania poziomem w górnym zbiorniku
• Badania zaprojektowanego układu sterowania w Simulinku
• Sterowanie obiektem rzeczywistym
Podstawy Automatyki
2
© M. Tomera

Literatura
• Tomera M.: Materiały pomocnicze do nauki teorii sterowania,
Strona internetowa:
vega.am.gdynia.pl/~tomera/teoria_sterowania.htm
• Brzózka J.: Regulatory i układy automatyki, Wydawnictwo MIKOM, 2004.
• Kowal J.: Podstawy automatyki, Uczelniane wydawnictwa Naukowo-
Dydaktyczne Akademii Górniczo-Hutniczej w Krakowie, 2004.
• Mazurek J., Vogt H., Żydanowicz W.: Podstawy automatyki, Oficyna
Wydawnicza Politechniki Warszawskiej, 2002.
3
© M. Tomera
Podstawy Automatyki

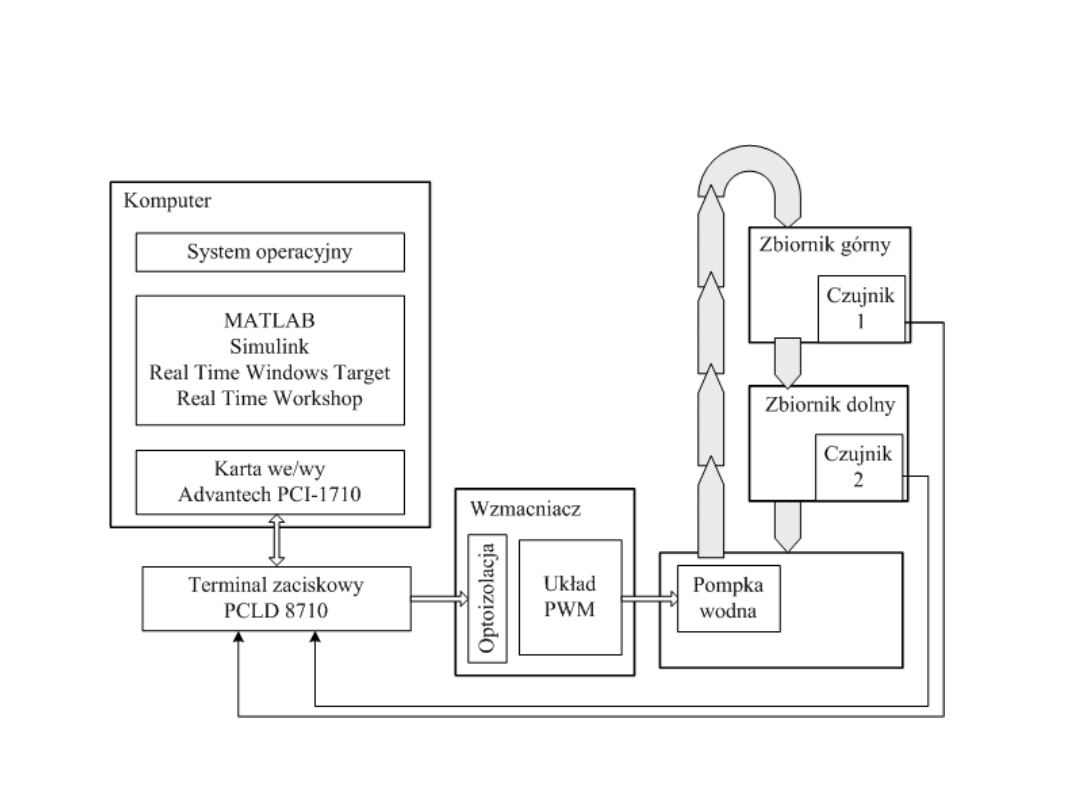
Widok stanowiska laboratoryjnego
4
© M. Tomera
Podstawy Automatyki
Sterowanie obiektem rzeczywistym - RTWT
5
© M. Tomera
Podstawy Automatyki
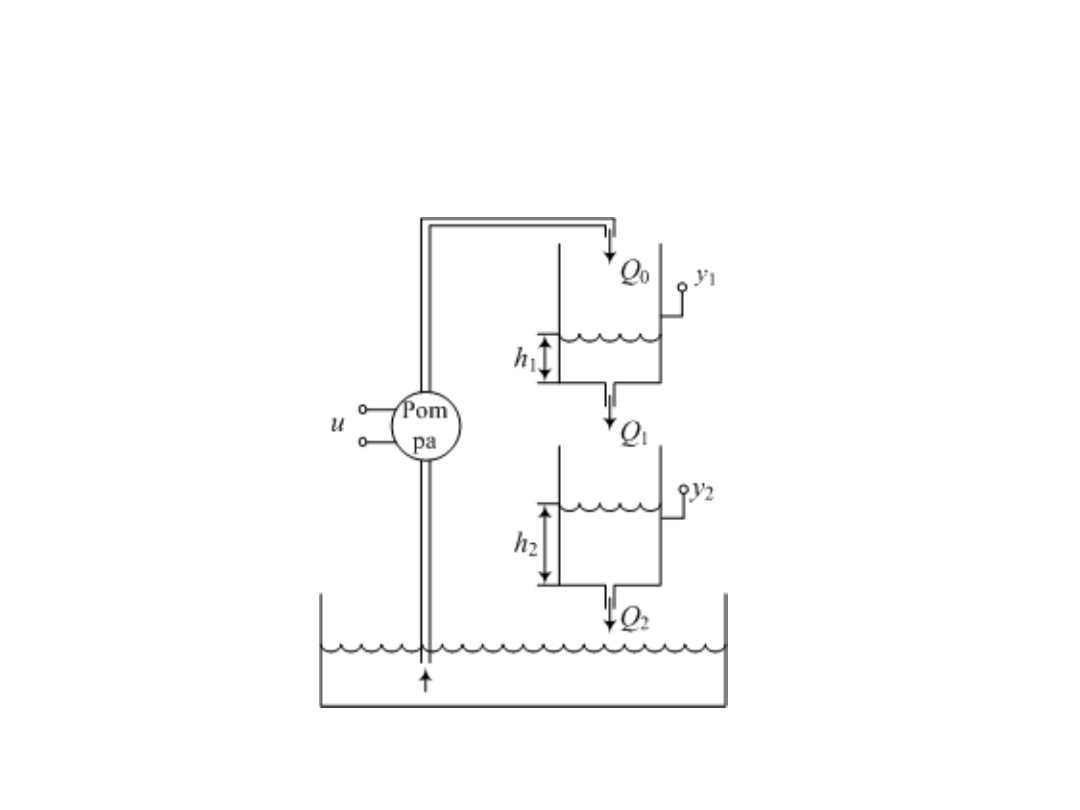
Układ kaskadowy dwóch zbiorników
6
© M. Tomera
Struktura układu
Podstawy Automatyki
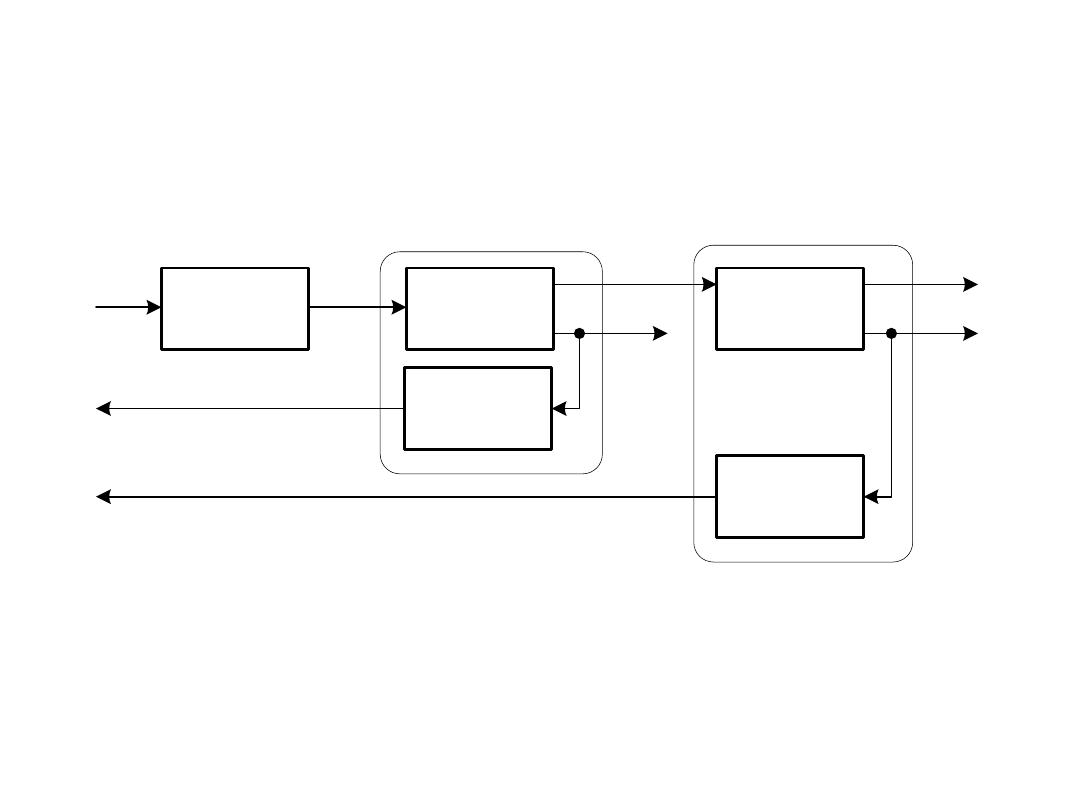
Schemat blokowy
7
© M. Tomera
Schemat blokowy układu kaskadowego dwóch zbiorników
Pompa
Zbiornik
górny
Czujnik 2
Zbiornik
dolny
h
1
Czujnik 1
Q
1
h
2
Q
2
u
1zm
u
2zm
Q
0
U
s
Podstawy Automatyki
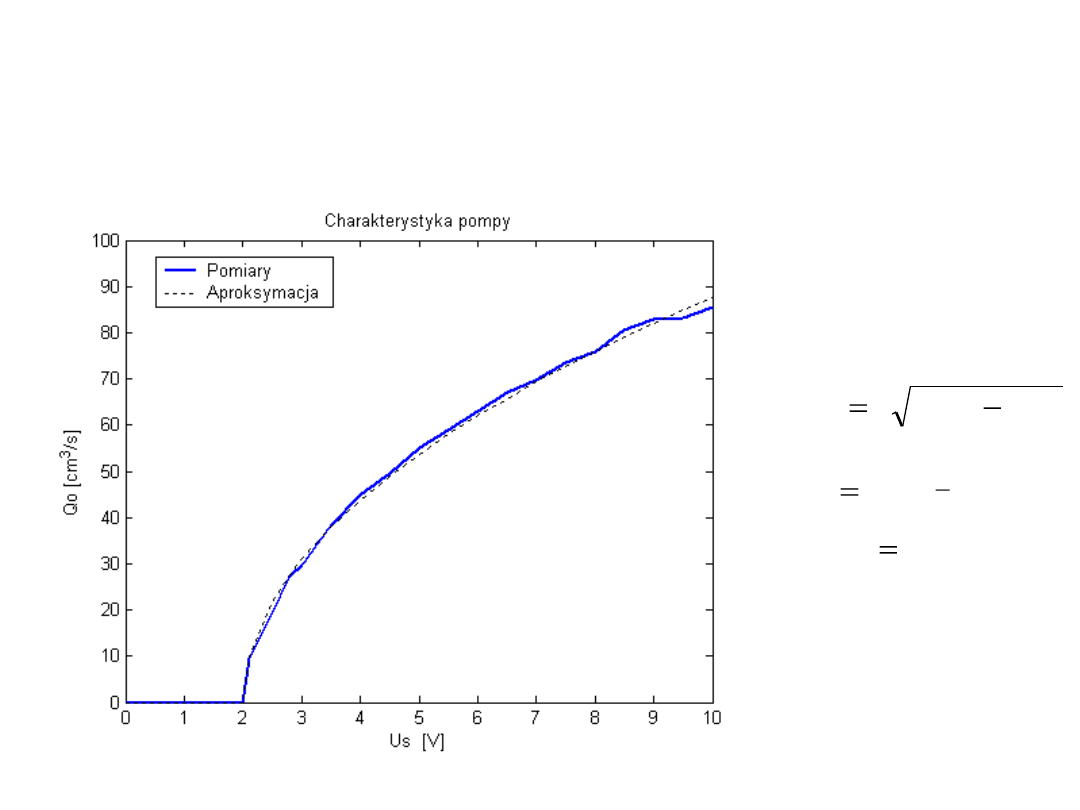
Model matematyczny pompy
8
© M. Tomera
Charakterystyka pompy
min
0
)
(
)
(
U
t
U
a
t
Q
s
0
.
19
a
0
.
2
m in
U
]
V
[
]
[
Podstawy Automatyki
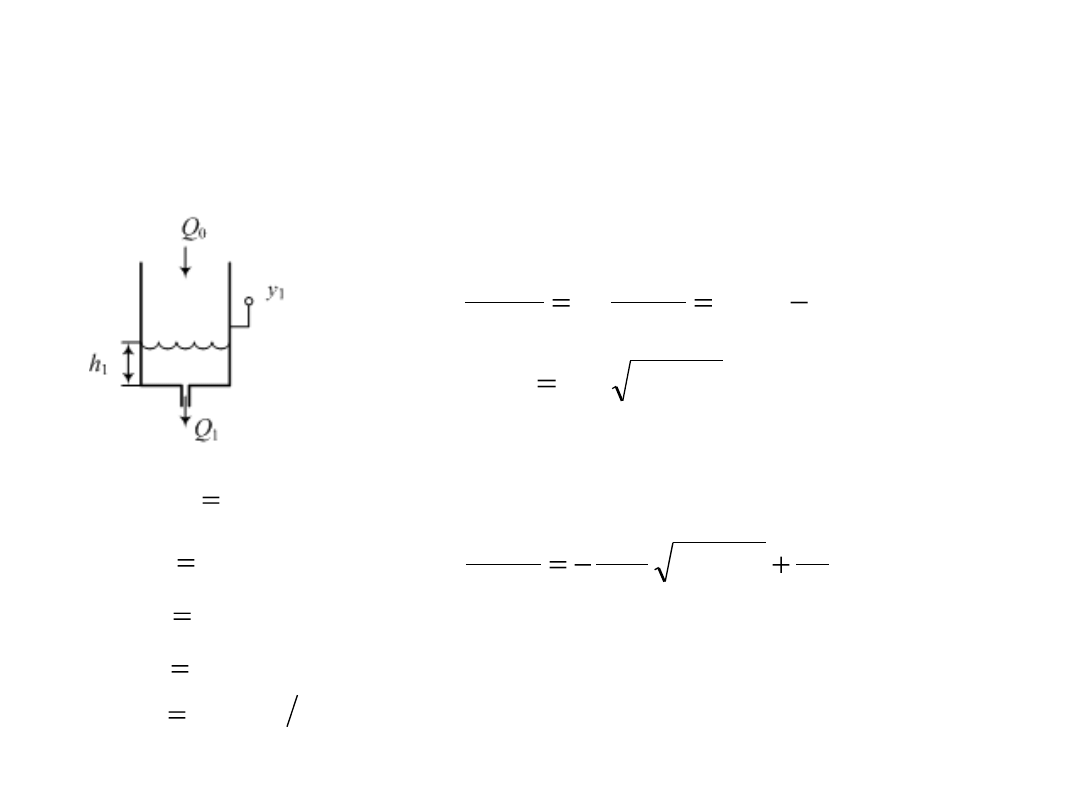
Model matematyczny górnego zbiornika
9
© M. Tomera
Definicja zmiennych
)
(
)
(
)
(
)
(
1
0
1
1
1
t
Q
t
Q
dt
t
dh
A
dt
t
dV
Równanie różniczkowe – bilans objętości
81
1
A
19635
.
0
1
S
25
m ax
h
)
(
2
)
(
1
1
1
1
t
gh
S
c
t
Q
Równanie dynamiki w górnym zbiorniku
)
(
1
)
(
2
)
(
0
1
1
1
1
1
1
t
Q
A
t
gh
A
S
c
dt
t
dh
1
1
c
981
g
]
cm
[
]
cm
[
2
]
cm
[
2
]
s
cm
[
2
]
-
[
Podstawy Automatyki
Model matematyczny czujnika w górnym zbiorniku
10
© M. Tomera
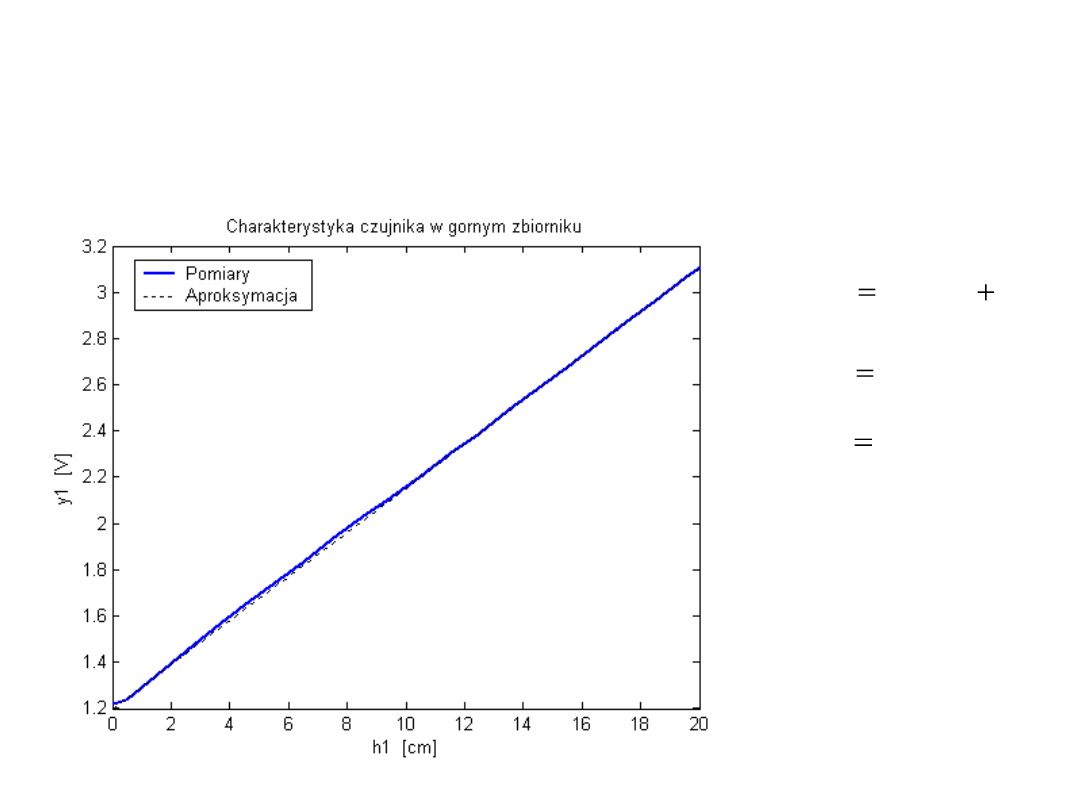
Charakterystyka czujnika w górnym zbiorniku
1
1
1
1
)
(
)
(
b
t
h
k
t
y
c
0952
.
0
1
c
k
1991
.
1
1
b
Podstawy Automatyki
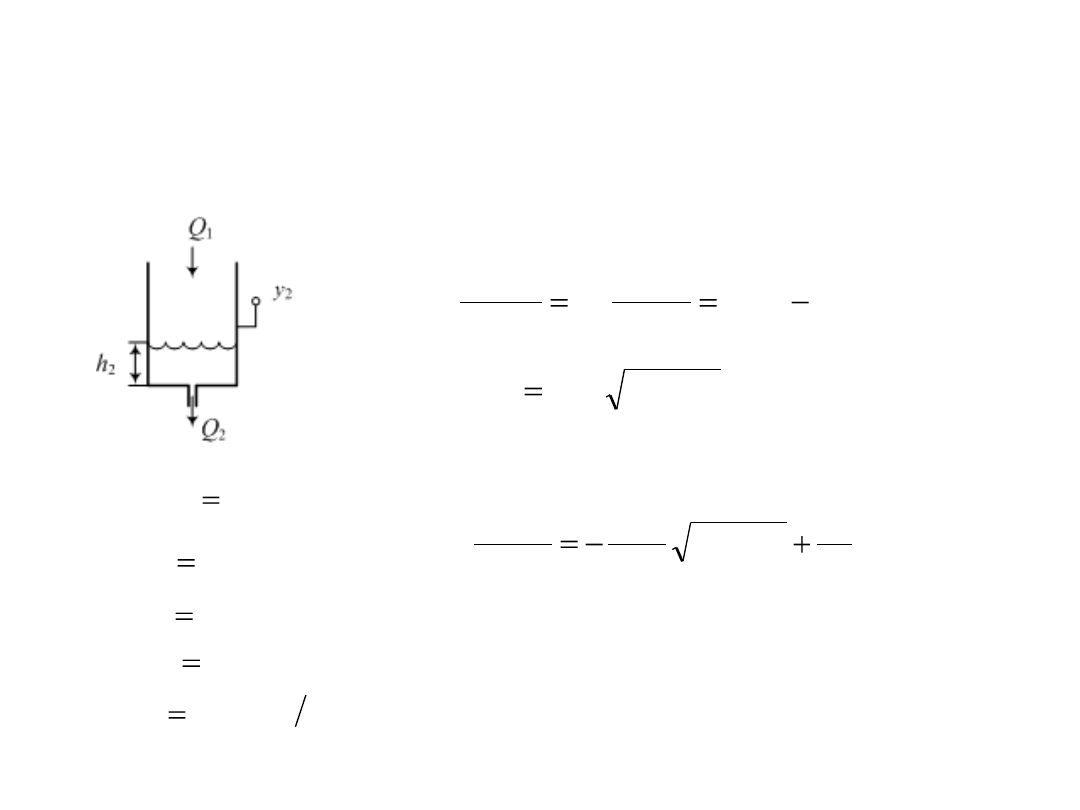
Model matematyczny dolnego zbiornika
11
© M. Tomera
Definicja zmiennych
)
(
)
(
)
(
)
(
2
1
2
2
2
t
Q
t
Q
dt
t
dh
A
dt
t
dV
Równanie różniczkowe – bilans objętości
81
2
A
19635
.
0
2
S
25
m ax
h
Równanie dynamiki w dolnym zbiorniku
)
(
1
)
(
2
)
(
1
2
2
2
2
2
2
t
Q
A
t
gh
A
S
c
dt
t
dh
99
.
0
2
c
981
g
)
(
2
)
(
2
2
2
2
t
gh
S
c
t
Q
]
cm
[
]
cm
[
2
]
s
cm
[
2
]
-
[
]
cm
[
2
Podstawy Automatyki
Model matematyczny czujnika w dolnym zbiorniku
12
© M. Tomera
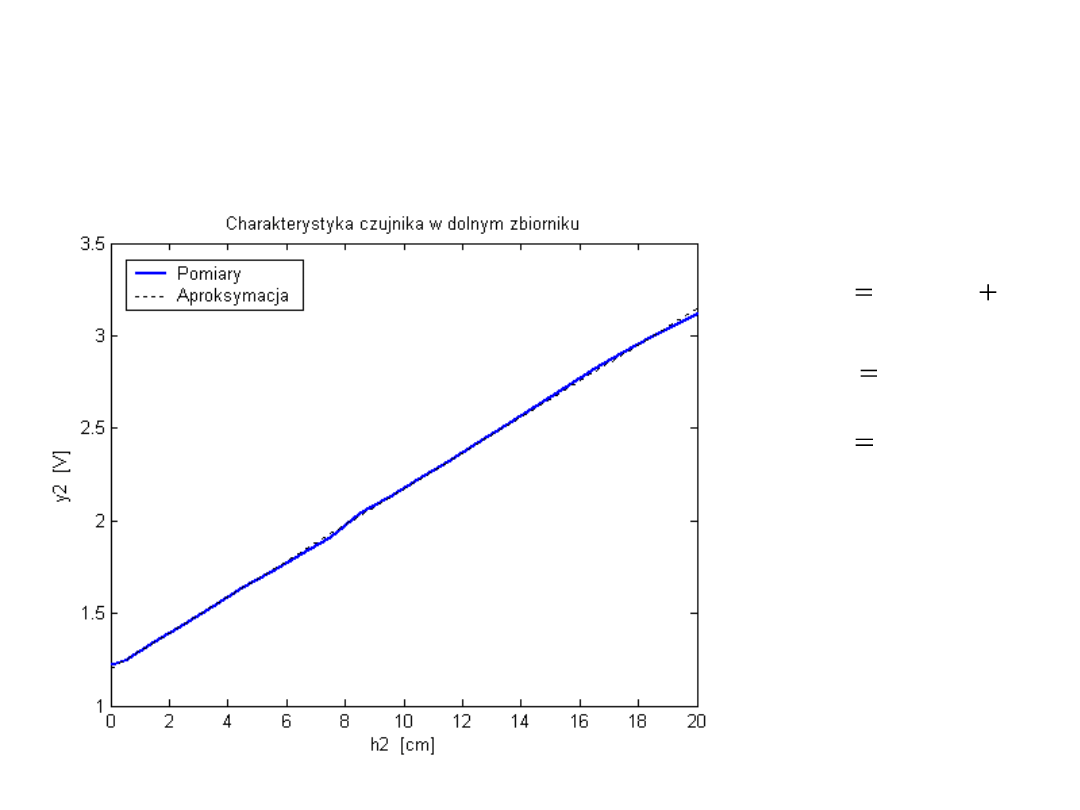
Charakterystyka czujnika w dolnym zbiorniku
2
2
2
2
)
(
)
(
b
t
h
k
t
y
c
0973
.
0
2
c
k
1991
.
1
2
b
Podstawy Automatyki
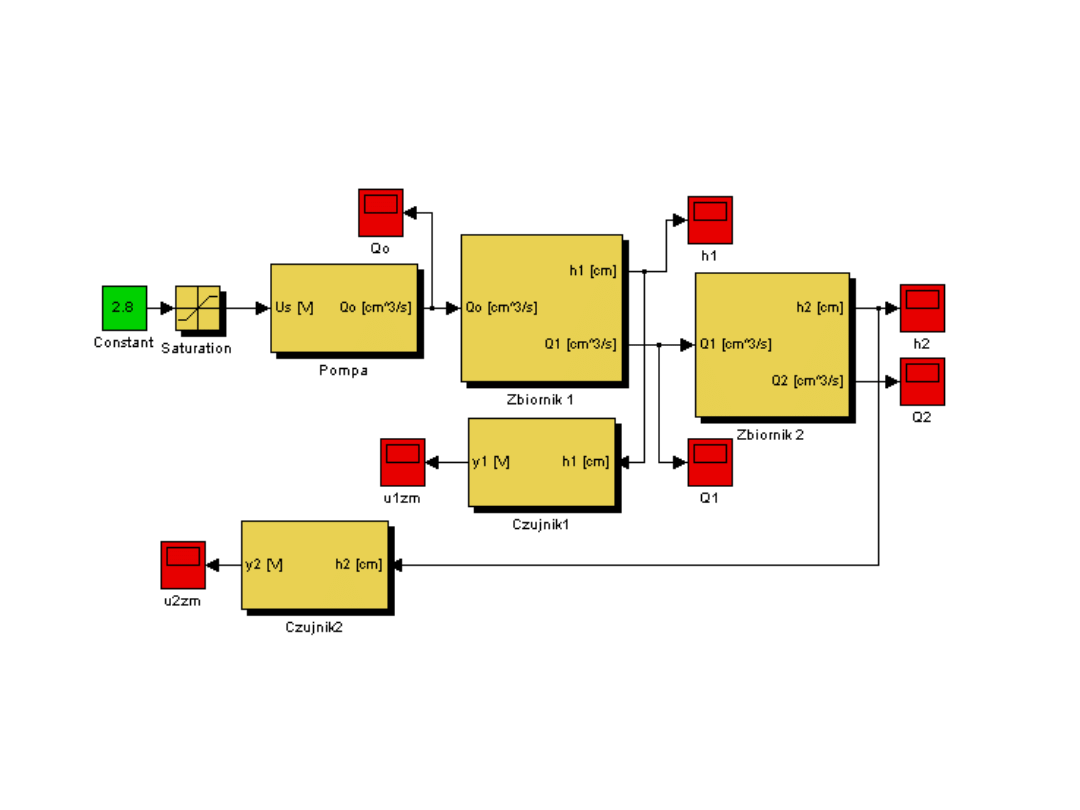
Implementacja układu kaskadowego w Simulinku
13
© M. Tomera
Podstawy Automatyki
Model matematyczny układu kaskadowego
14
© M. Tomera
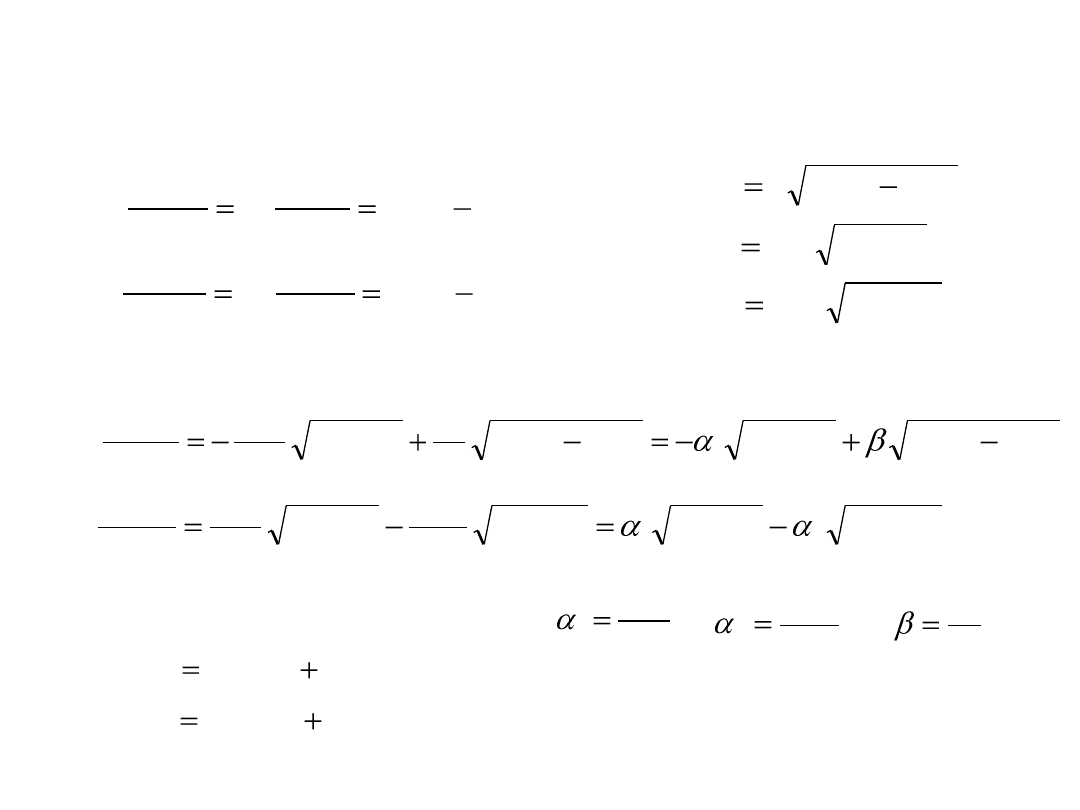
Równania bilansu objętości
)
(
)
(
)
(
)
(
1
0
1
1
1
t
Q
t
Q
dt
t
dh
A
dt
t
dV
Równania stanu
m in
1
1
m in
1
1
1
1
1
1
)
(
)
(
2
)
(
)
(
2
)
(
U
t
U
t
gh
U
t
U
A
a
t
gh
A
S
c
dt
t
dh
s
s
)
(
)
(
)
(
)
(
2
1
2
2
2
t
Q
t
Q
dt
t
dh
A
dt
t
dV
)
(
2
)
(
1
1
1
1
t
gh
S
c
t
Q
)
(
2
)
(
2
2
2
2
t
gh
S
c
t
Q
min
0
)
(
)
(
U
t
U
a
t
Q
s
)
(
2
)
(
2
)
(
2
)
(
2
)
(
2
2
1
1
2
2
2
2
1
1
1
1
2
t
gh
t
gh
t
gh
A
S
c
t
gh
A
S
c
dt
t
dh
Równania wyjścia
1
1
1
1
)
(
)
(
b
t
h
k
t
y
c
2
2
2
2
)
(
)
(
b
t
h
k
t
y
c
1
1
1
1
A
S
c
2
2
2
2
A
S
c
1
A
a
Podstawy Automatyki
Linearyzacja modelu matematycznego
15
© M. Tomera
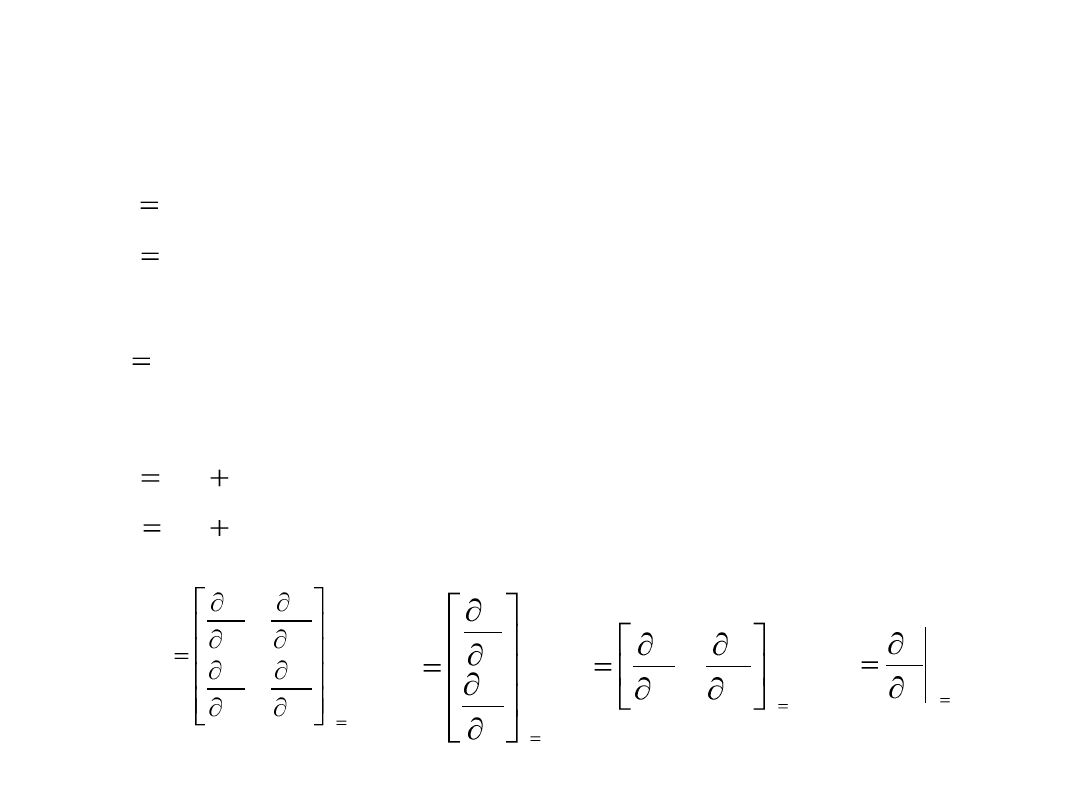
Nieliniowe równania stanu
)
,
,
(
2
1
1
1
u
x
x
f
x
Liniowy model matematyczny obiektu
)
,
,
(
2
1
2
2
u
x
x
f
x
Nieliniowe równanie wyjścia
)
,
,
(
2
1
u
x
x
g
y
u
B
Αx
x
Du
y
Cx
gdzie:
0
2
2
1
2
2
1
1
1
x
Α
x
f
x
f
x
f
x
f
0
2
1
u
u
f
u
f
B
0
2
1
x
C
x
g
x
g
0
u
u
g
D
Podstawy Automatyki

Linearyzacja układu kaskadowego
16
© M. Tomera
Punkt pracy
)
,
,
,
,
(
0
2
0
1
0
0
2
0
1
zm
zm
s
y
y
U
h
h
Model matematyczny układu kaskadowego dwóch zbiorników zapisany w postaci
macierzowych równań stanu
)
(
0
2
2
1
2
2
1
2
0
2
1
2
)
(
)
(
0
min
0
0
2
2
0
1
1
0
2
1
0
1
1
0
1
1
0
2
2
0
1
1
s
s
s
U
U
U
U
h
h
h
h
h
g
h
g
h
g
dt
h
h
d
dt
h
h
d
Podstawy Automatyki
Zlinearyzowany układ kaskadowy
17
© M. Tomera
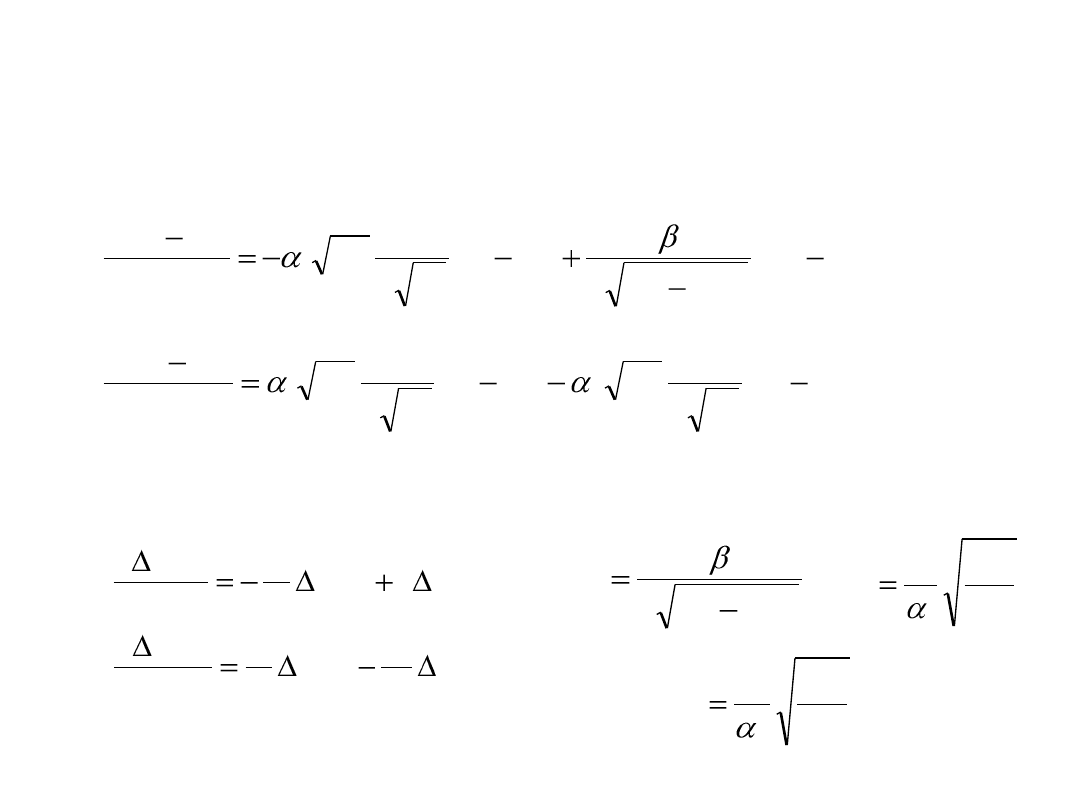
Równania stanu po zlikwidowaniu opisu macierzowego
)
(
2
)
(
2
1
2
)
(
0
m in
0
0
1
1
0
1
1
0
1
1
s
s
s
U
U
U
U
h
h
h
g
dt
h
h
d
)
(
2
1
2
)
(
2
1
2
)
(
0
2
2
0
2
2
0
1
1
0
1
1
0
2
2
h
h
h
g
h
h
h
g
dt
h
h
d
Zlinearyzowany model matematyczny układu kaskadowego dwóch zbiorników
)
(
)
(
1
)
(
1
1
1
t
U
k
t
h
T
dt
t
h
d
s
)
(
1
)
(
1
)
(
2
2
1
1
2
t
h
T
t
h
T
dt
t
h
d
min
0
2
U
U
k
s
g
h
T
0
1
1
1
2
1
g
h
T
0
2
2
2
2
1
Podstawy Automatyki
Uzyskane transmitancje operatorowe
18
© M. Tomera
• dla górnego zbiornika
1
)
(
)
(
)
(
1
1
1
1
sT
kT
s
U
s
H
s
G
s
• dla dolnego zbiornika
)
1
)(
1
(
)
(
)
(
)
(
2
1
2
2
2
sT
sT
kT
s
U
s
H
s
G
s
Podstawy Automatyki
Uzyskane zlinearyzowane równania dynamiczne
19
© M. Tomera
• równania stanu
• równania wyjścia
u
k
t
x
t
x
T
T
T
t
x
t
x
0
)
(
)
(
1
1
0
1
)
(
)
(
2
1
2
1
1
2
1
2
1
2
1
2
1
0
0
x
x
k
k
y
y
c
c
)
(
)
(
)
(
)
(
2
1
2
1
t
h
t
h
t
x
t
x
)
(
)
(
t
U
t
u
s
Podstawy Automatyki
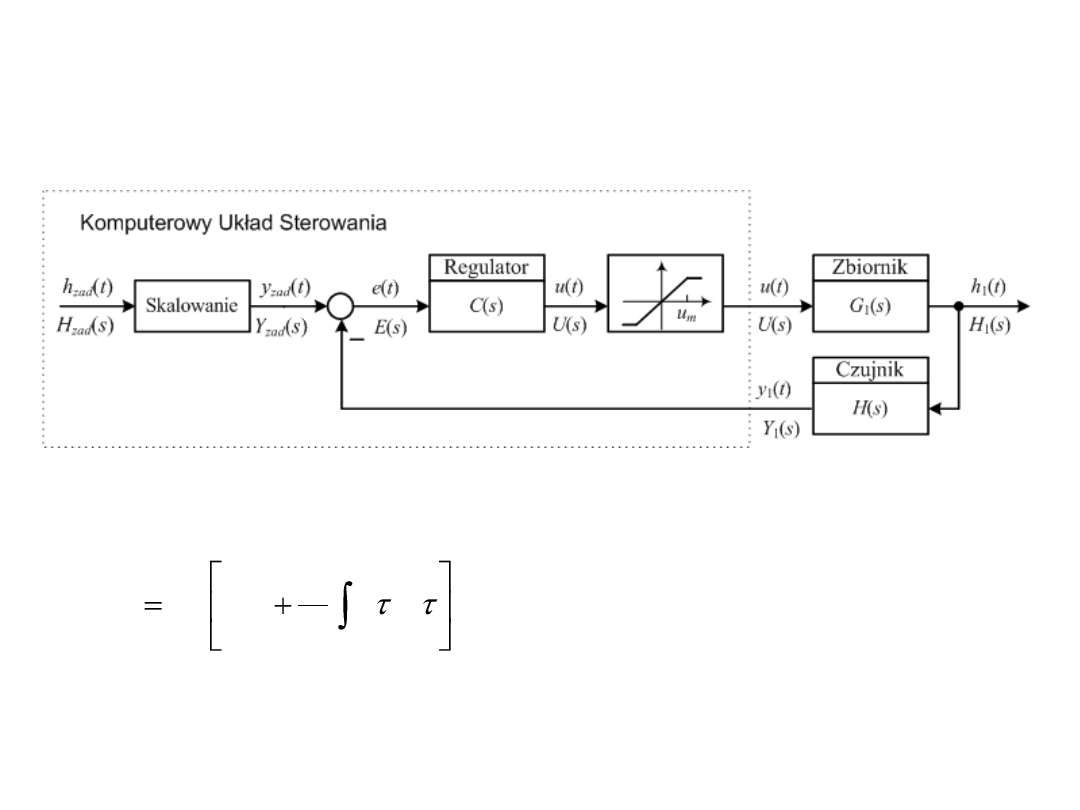
Model układu sterowania
20
© M. Tomera
Schemat blokowy układu sterowania poziomem wody w górnym zbiorniku
Algorytm regulatora ciągłego PI
t
I
P
d
e
T
t
e
K
t
u
0
)
(
1
)
(
)
(
Podstawy Automatyki
Synteza sterowania poziomem w górnym zbiorniku
21
© M. Tomera
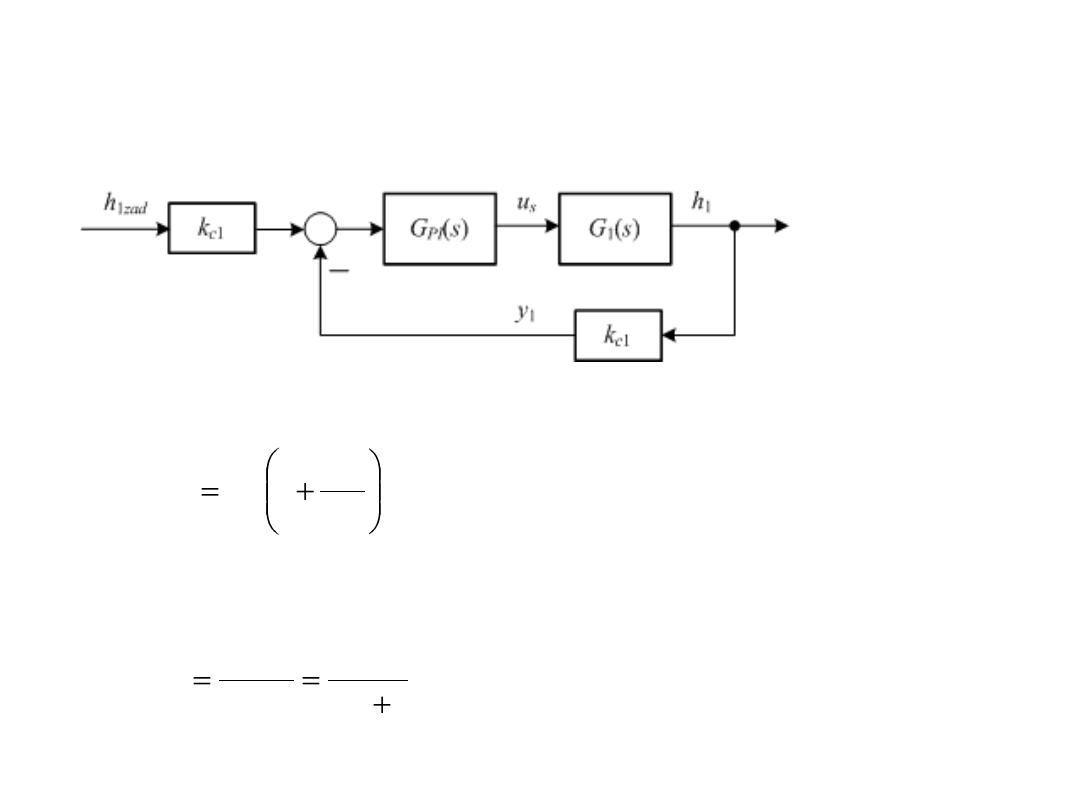
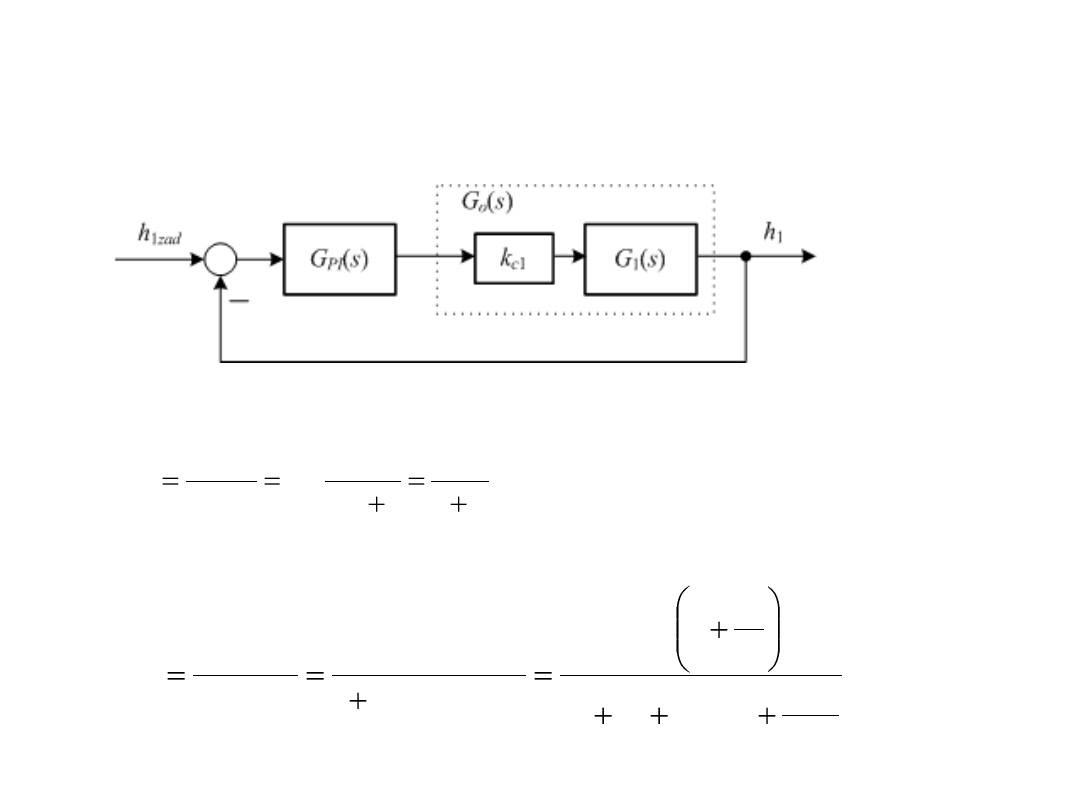
Schemat blokowy układu
I
P
PI
sT
K
s
G
1
1
)
(
Transmitancja regulatora PI
Transmitancja górnego zbiornika
1
)
(
)
(
)
(
1
1
1
1
1
sT
T
k
s
U
s
H
s
G
s
Podstawy Automatyki
Synteza regulatora PI
22
© M. Tomera
Schemat blokowy układu
I
P
P
I
P
o
PI
o
PI
zad
T
bK
s
bK
a
s
T
s
bK
s
G
s
G
s
G
s
G
s
H
s
H
s
T
)
(
1
)
(
)
(
1
)
(
)
(
)
(
)
(
)
(
2
1
1
Transmitancja obiektu
Transmitancja wypadkowa całego układu
a
s
b
sT
T
k
k
s
U
s
H
s
G
c
s
o
1
)
(
)
(
)
(
1
1
1
1
1
Podstawy Automatyki
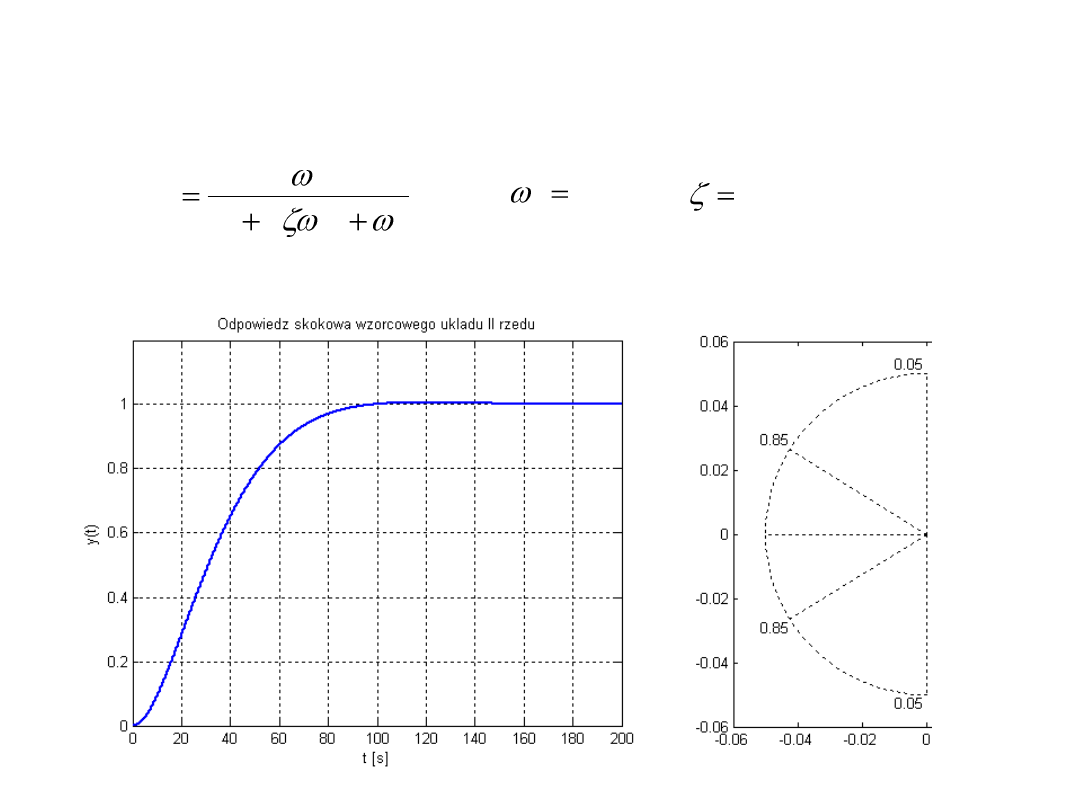
Wzorcowy układ II rzędu
23
© M. Tomera
Transmitancja operatorowa
Odpowiedź skokowa i rozkład biegunów
2
2
2
2
)
(
n
n
n
s
s
s
T
05
.
0
n
85
.
0
Podstawy Automatyki
Dobór parametrów regulatora PI
24
© M. Tomera
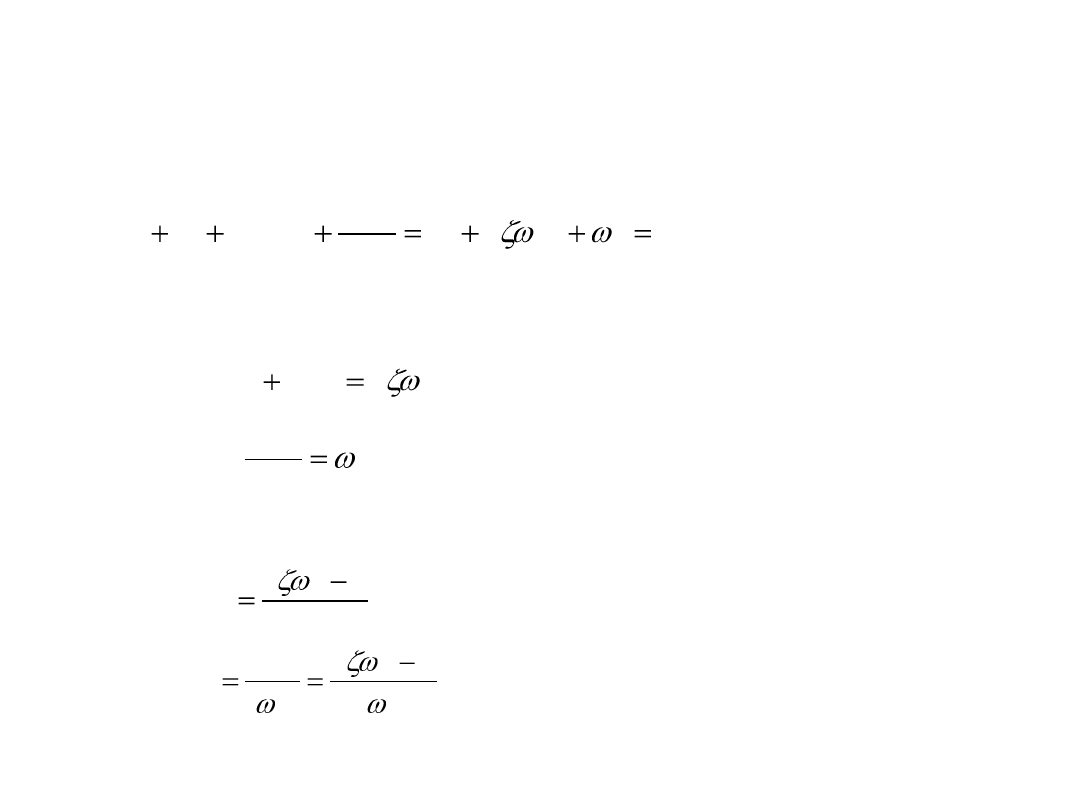
Metoda lokowania biegunów
0
2
)
(
2
2
2
n
n
I
P
P
s
s
T
bK
s
bK
a
s
Z porównania współczynników równania charakterystycznego
Poszukiwane parametry regulatora PI
n
P
bK
a
s
2
:
1
2
0
:
n
I
P
T
bK
s
b
a
K
n
P
2
2
2
2
n
n
n
P
I
a
bK
T
Podstawy Automatyki
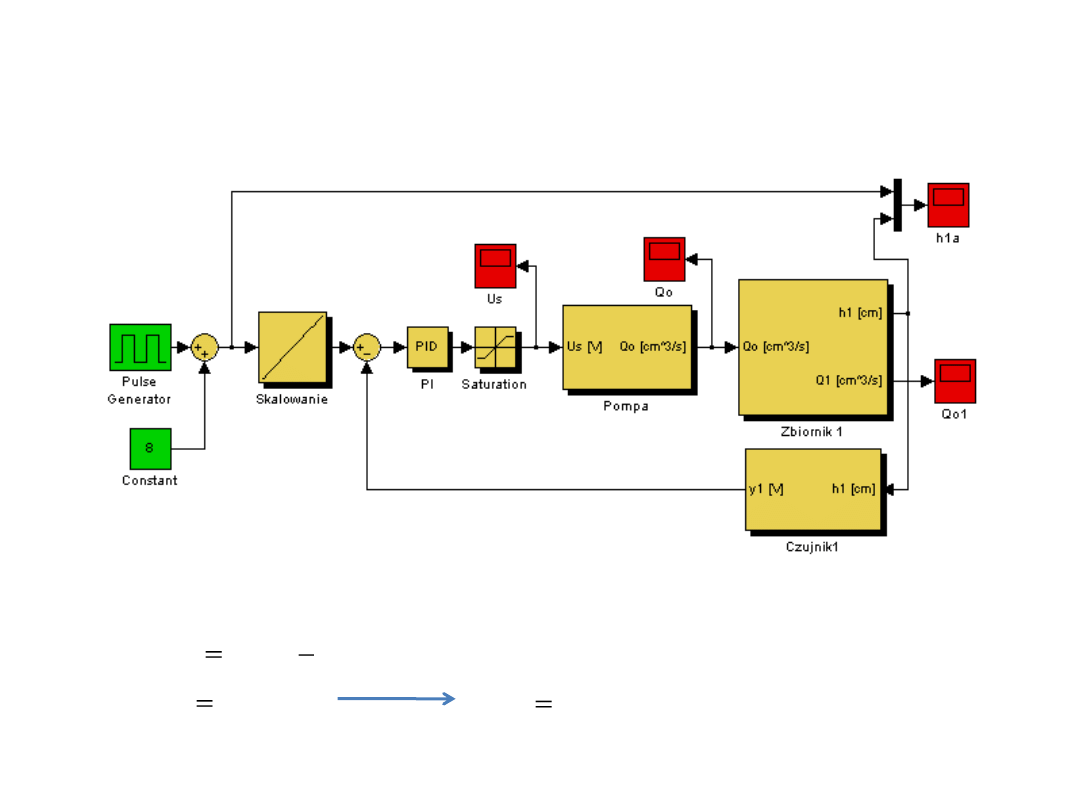
Implementacja układu sterowania w Simulinku
25
© M. Tomera
Podstawy Automatyki
03
.
4
P
K
4
.
22
I
T
]
[s
]
[
Model symulacyjny
Parametry regulatora PI
18
.
0
I
K
]
/
1
[ s
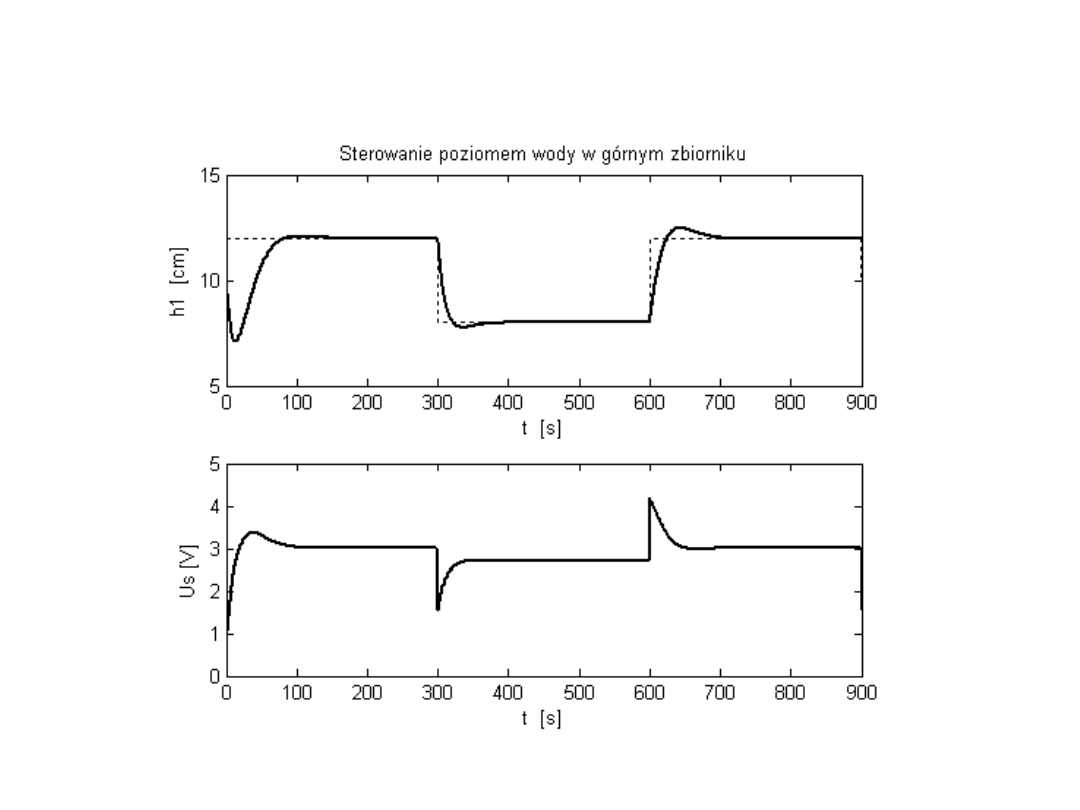
Wyniki badań symulacyjnych
26
© M. Tomera
Podstawy Automatyki
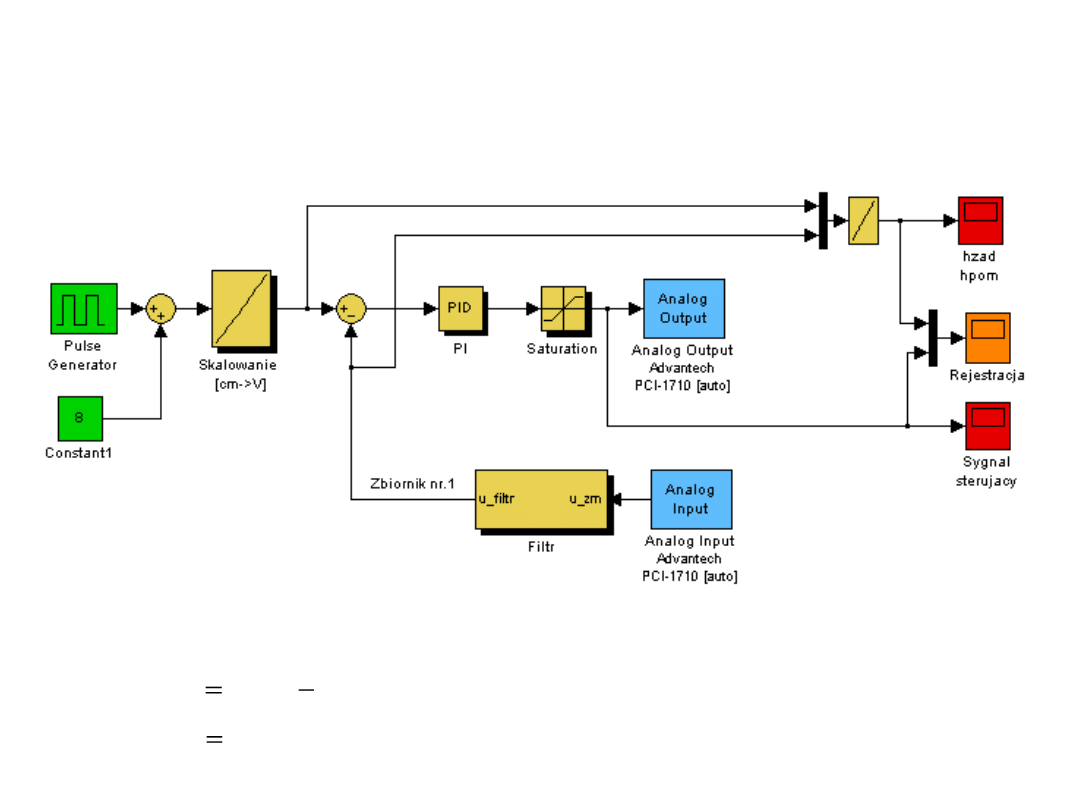
Implementacja układu sterowania w Simulinku - RTWT
27
© M. Tomera
03
.
4
P
K
]
[
Model układu regulacji do sterowania w czasie rzeczywistym
Parametry regulatora PI
Podstawy Automatyki
18
.
0
I
K
]
/
1
[ s
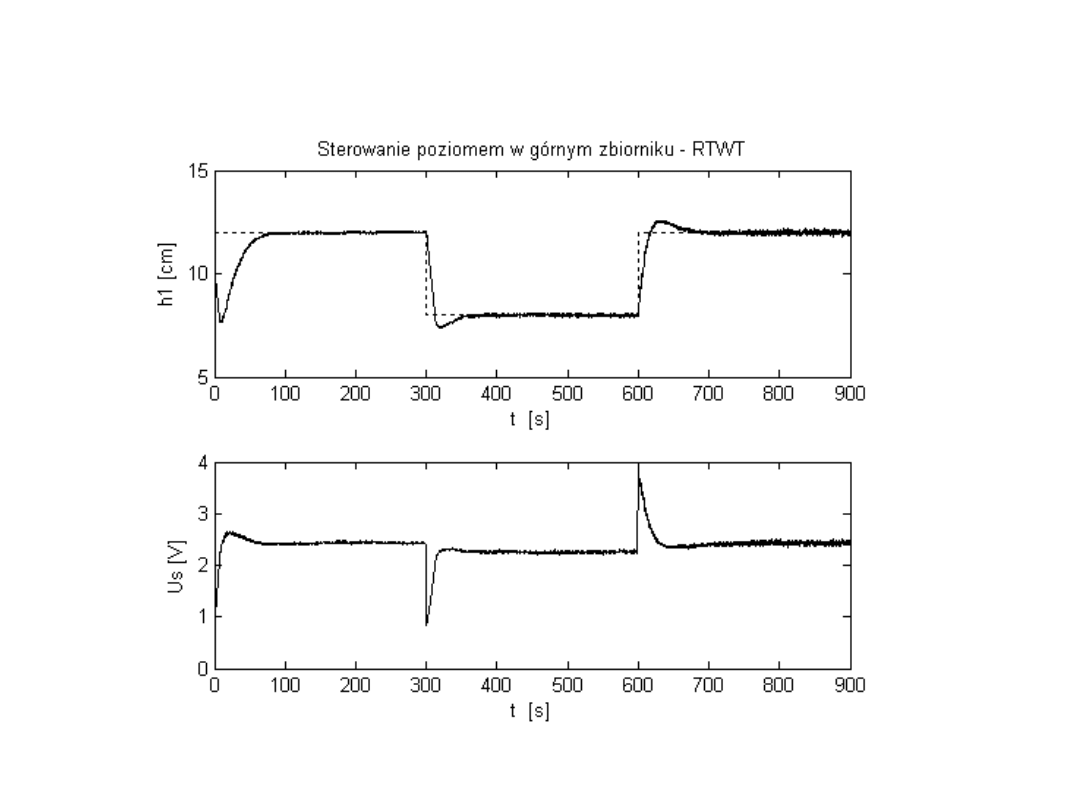
Weryfikacja na obiekcie rzeczywistym - RTWT
28
© M. Tomera
Podstawy Automatyki
Wyszukiwarka
Podobne podstrony:
W01 Wprowadzenie
EN w01 wprowadzenie
OEiM AiR W01 wprowadzenie
W01 Wprowadzenie
(Ćw nr 3,4) PA Lab UKLADY PRZELACZAJACE WPROWADZENIE
IMiU W01 Wykład wprowadzający
PA 03 10 12 W01
(Ćw nr 3,4) PA Lab UKLADY PRZELACZAJACE WPROWADZENIE
W01(Patomorfologia) II Lek
wprowadzenie[1]
Wykład 1 inżynierskie Wprowadzenie do zarządzania operacyjnego
PREZENTACJA 1 wprowadzenie
Wprowadzenie do medycyny rozwojowej 1
Zdrowie psychiczne wprowadzenie
więcej podobnych podstron