
Polit ec hnik a Lubels k a, Wy dz iał Mec hanic z ny
Katedra Automatyzacji
ul . Nadbystrzycka 36, 20-618 Lubl i n
tel ./fax.:(+48 81) 5384267 e-mai l :automat@pol l ub.pl ; wm.ka@pol l ub.pl
LABORATORIUM
PODSTAW AUTOMATYKI
Materiały pomocnicze do ćwiczeń nr A1, A2, A3
WPROWADZENIE DO UKŁADÓW
PRZEŁĄCZAJĄCYCH ORAZ DO BUDOWY I
PROGRAMOWANIA STEROWNIKÓW PLC
Wydział Mechaniczny
Sala 406


Katedra Automatyzacji Politechniki Lubelskiej.
Laboratorium Automatyki Przemysłowej. Materiały pomocnicze do ćwiczeń nr A1, A2, A3.
Opracował dr Paweł Staczek (ostatnia aktualizacja 21.02.2012)
SPIS TREŚCI
RZEKAŹNIKOWE UKŁADY STEROWANIA
ODSTAWOWE ELEMENTY DIAGRAMU DRABINKOWEGO
.................................................................................... 11

Katedra Automatyzacji Politechniki Lubelskiej.
Laboratorium Automatyki Przemysłowej. Materiały pomocnicze do ćwiczeń nr A1, A2, A3.
Opracował dr Paweł Staczek (ostatnia aktualizacja 21.02.2012)

Katedra Automatyzacji Politechniki Lubelskiej.
Laboratorium Automatyki Przemysłowej. Materiały pomocnicze do ćwiczeń nr A1, A2, A3.
Opracował dr Paweł Staczek (ostatnia aktualizacja 21.02.2012)
1
PRZEZNACZENIE OPRACOWANIA
Niniejsze
opracowanie
jest
wprowadzeniem
teoretycznym
do
ćwiczeń
laboratoryjnych:
A1. Sterowanie modelem wtryskarki do tworzyw przy wykorzystaniu sterownika PLC.
A2. Sterowanie silnikiem krokowym przy wykorzystaniu sterownika PLC. Przetwornik
napięcie->częstotliwość.
A3. Sterowanie manipulatorem binarnym przy wykorzystaniu sterownika PLC.
I. STYCZNIKOWE UKŁADY PRZEŁĄCZAJĄCE
Układy przełączające
Układy przełączające to układy automatyki przetwarzające informacje dyskretne
(dwustanowe). W systemach automatyki przemysłowej są to wszelkiego rodzaju układy
sterujące dwustanowymi urządzeniami wykonawczymi (typu załączenie/wyłączenie) na
podstawie dyskretnych sygnałów docierających z obiektu sterowania.
Typowymi źródłami sygnałów dwustanowych w automatyce przemysłowej są:
styki elektryczne przycisków i przełączników pulpitów sterowniczych (aktywowane
manualnie),
styki elektryczne wyłączników drogowych (krańcowych) ruchomych podzespołów
maszyn,
detektory obecności przedmiotów, części, ludzi itp. (np. fotokomórki),
sygnalizatory graniczne wielkości ciągłych (np. wyłączniki termiczne, presostaty,
dyskretne sygnalizatory poziomu cieczy itp.),
styki (wyjścia) przekaźników czasowych (odmierzających zadane interwały czasu).
Typowymi dwustanowymi urządzeniami wykonawczymi są wszelkiego rodzaju
urządzenia oddziałujące na obiekt sterowania, wymagające dostarczenia dyskretnego sygnału
nastawiającego, na przykład:
dwustanowy elektrozawór pneumatyczny,
trójfazowy silnik elektryczny załączany przekaźnikiem,
Katedra Automatyzacji Politechniki Lubelskiej.
Laboratorium Automatyki Przemysłowej. Materiały pomocnicze do ćwiczeń nr A1, A2, A3.
Opracował dr Paweł Staczek (ostatnia aktualizacja 21.02.2012)
2
grzejnik elektryczny załączany przekaźnikiem,
lampka sygnalizacyjna (monitorująca sygnał dyskretny),
Układy przełączające dzieli się na dwie kategorie:
układy kombinacyjne – to układy przełączające, w których wartości wyjść są funkcją
wyłącznie sygnałów wejściowych, tzn. nie zależą od czasu (stanów przeszłych);
układy sekwencyjne – to układy przełączające, w których wartości wyjść zależą także od
stanów przeszłych układu (stanów wyjść).
Podstawowe funkcje logiczne
Układy przełączające mogą być budowane z wykorzystaniem elementów logicznych,
tj. elementarnych układów realizujących podstawowe funkcje logiczne:
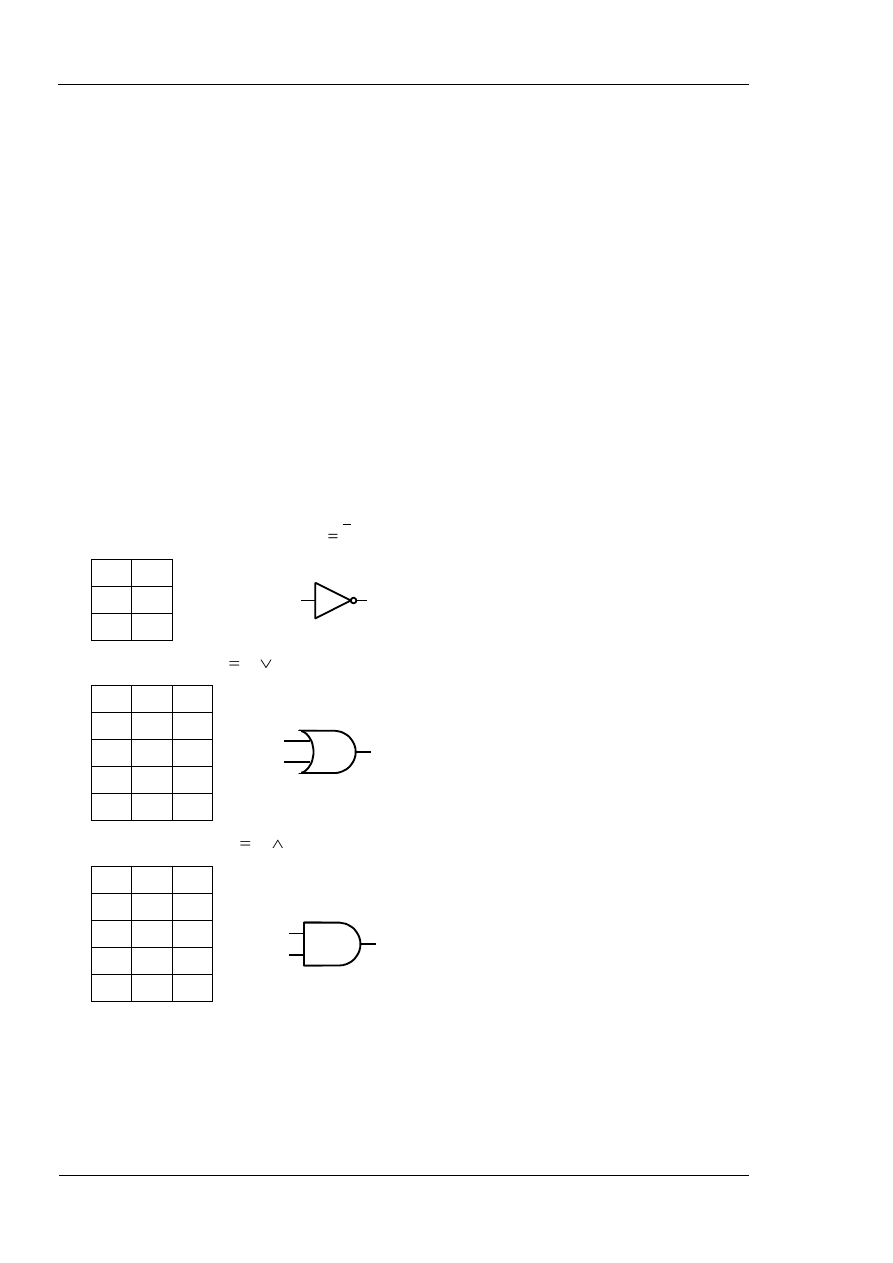
negacja (zaprzeczenie, NOT):
x
y
(1)
x
y
0
1
1
0
suma (lub, OR):
2
1
x
x
y
(2)
x
1
x
2
y
0
0
0
1
0
1
0
1
1
1
1
1
iloczyn (i, AND):
2
1
x
x
y
(3)
x
1
x
2
y
0
0
0
1
0
0
0
1
0
1
1
1
Jak widać, sposób działania układu logicznego (w ogólności przełączającego) może
być podany równoważnie w postaci funkcji (formuły matematycznej), tabeli (tzw. tabeli
prawdy układu) a także przepisu słownego lub wykresu (diagramu). Za pomocą symbolu „0”
oznacza się wartość logiczną fałsz, przez „1” wartość prawdę.
x
y
x
1
x
2
y
x
1
x
2
y
Katedra Automatyzacji Politechniki Lubelskiej.
Laboratorium Automatyki Przemysłowej. Materiały pomocnicze do ćwiczeń nr A1, A2, A3.
Opracował dr Paweł Staczek (ostatnia aktualizacja 21.02.2012)
3
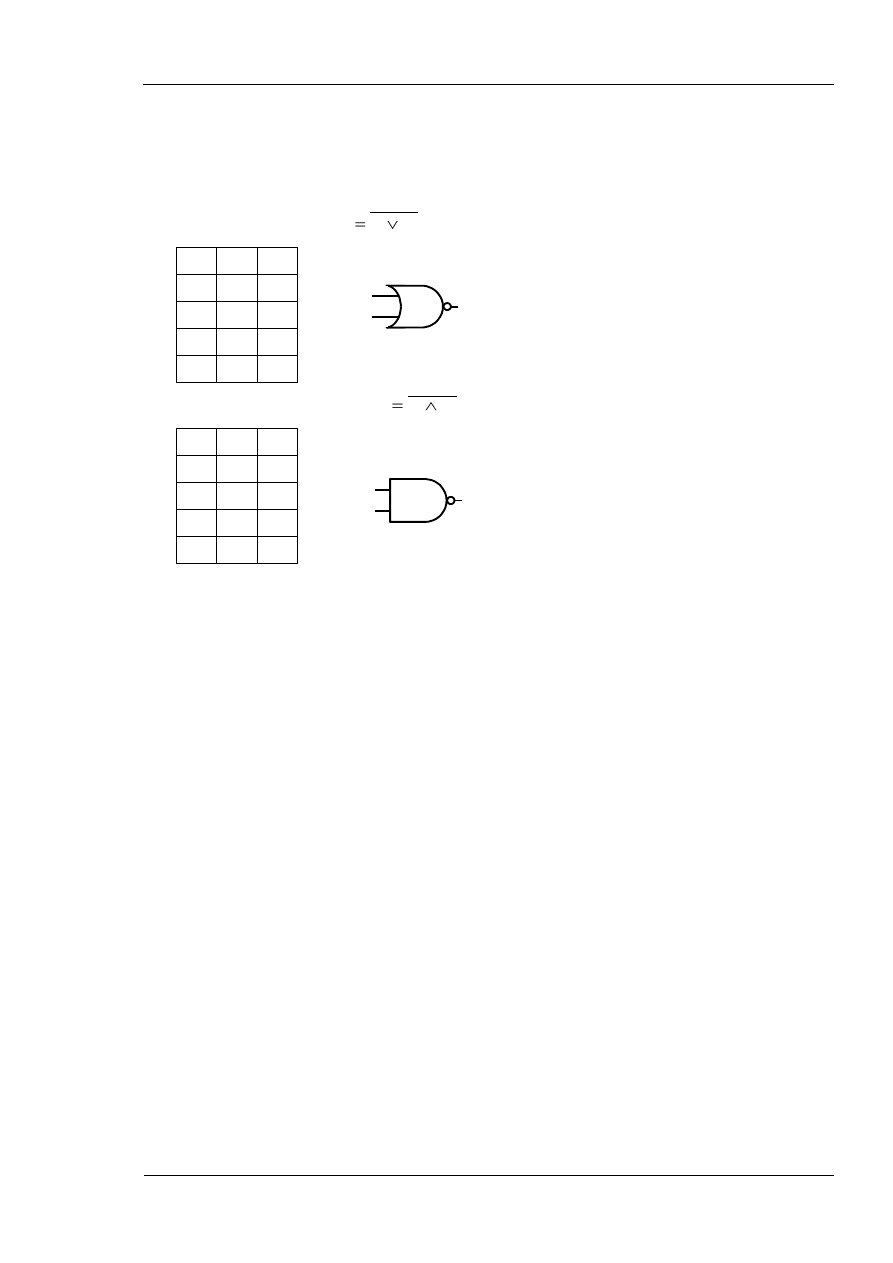
Na podstawie praw algebry Boole’a można wykazać, że dowolnie złożony układ
logiczny (kombinacyjny) można zrealizować wykorzystując tylko jeden element logiczny o
działaniu: negacja sumy albo negacja iloczynu:
negacja sumy (NOR):
2
1
x
x
y
x
1
x
2
y
0
0
1
1
0
0
0
1
0
1
1
0
negacja iloczynu (NAND):
2
1
x
x
y
x
1
x
2
y
0
0
1
1
0
1
0
1
1
1
1
0
Przekaźnikowe układy sterowania
Układy przełączające w przemysłowych systemach automatyki realizowane są
kilkoma sposobami, wymienionymi według chronologii upowszechnienia:
z wykorzystaniem elektrycznych elementów łączeniowych (styków i przekaźników),
z zastosowaniem elektronicznych układów logicznych (tzw. bramek logicznych),
przez uniwersalne urządzenia mikroprocesorowe zwane programowalnymi sterownikami
logicznymi (z ang. PLC – Programmable Logic Controller).
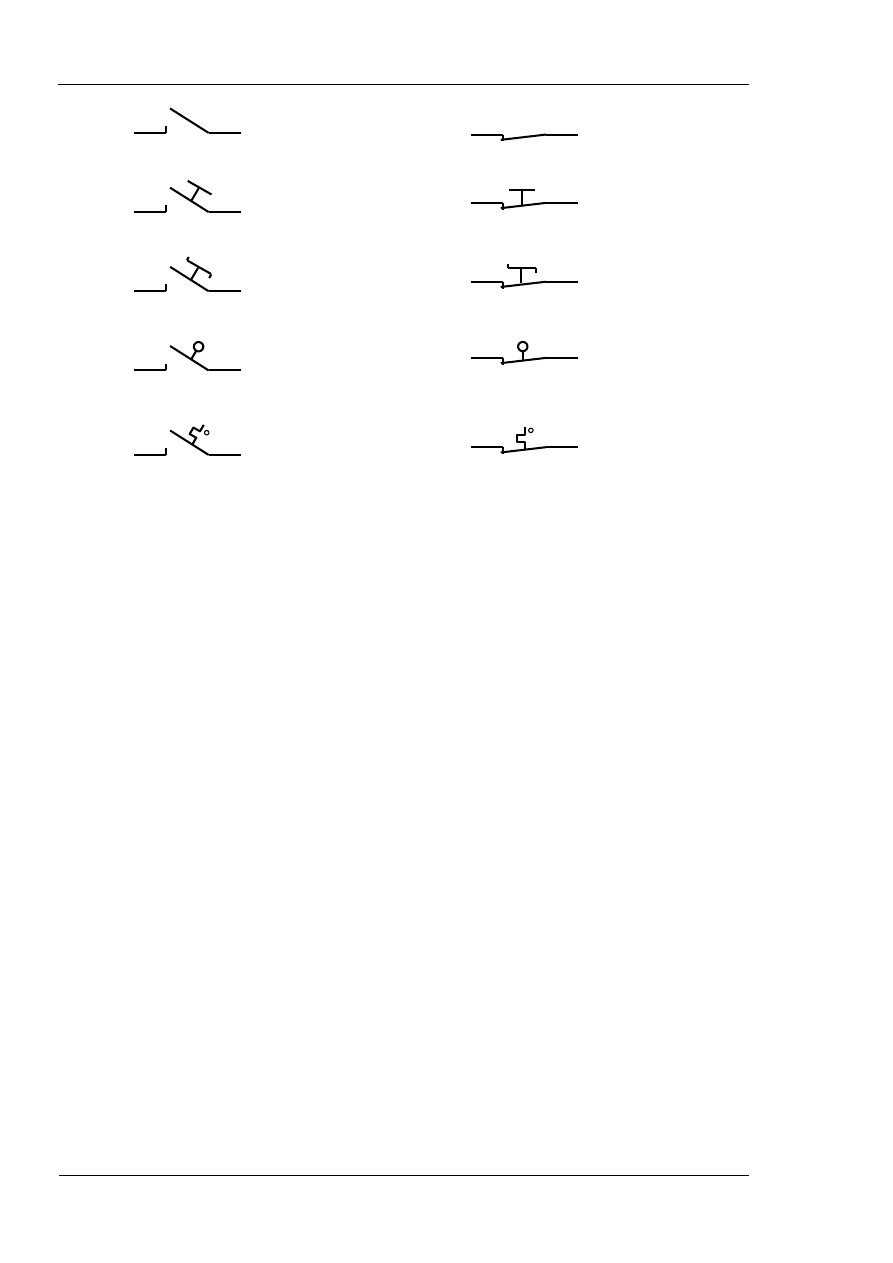
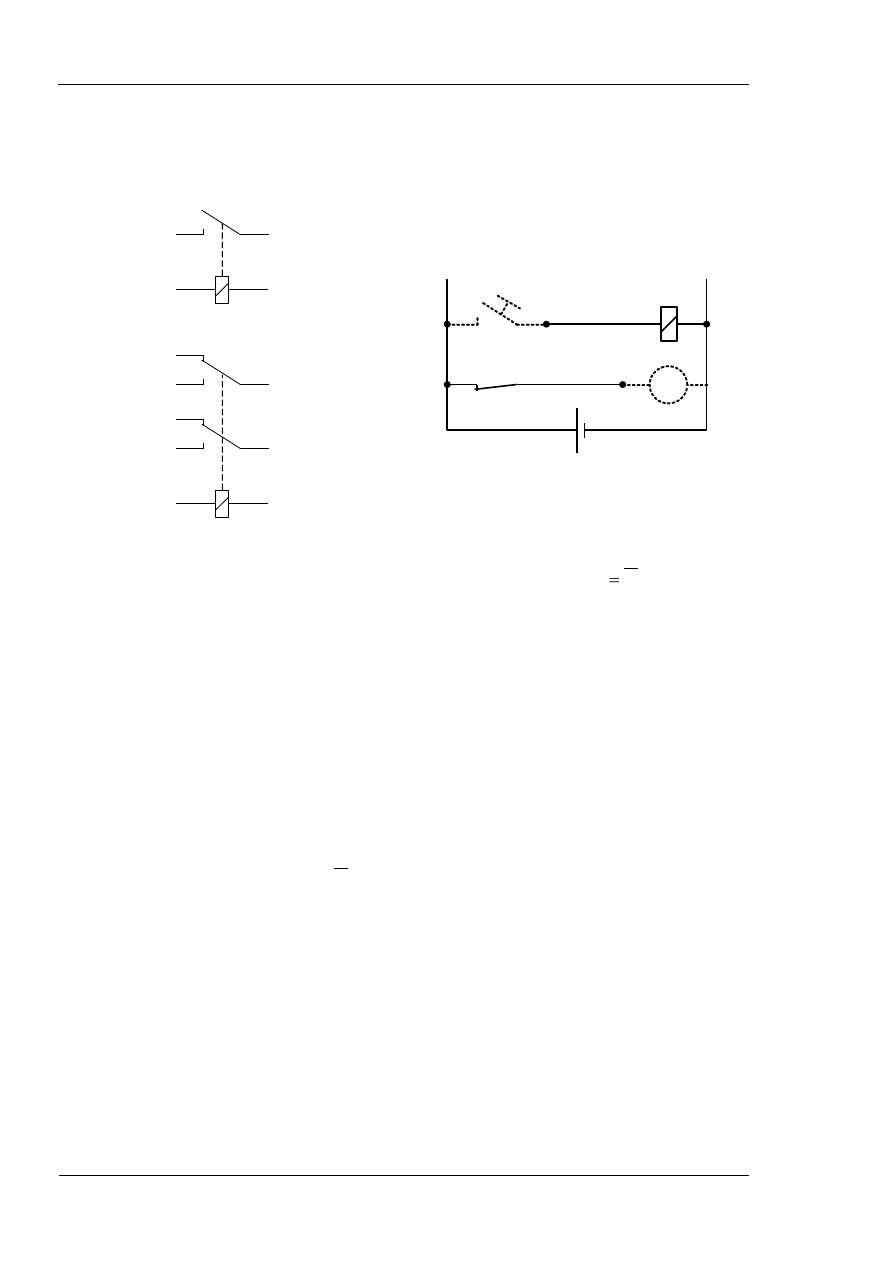
Na rys.1. oraz rys.2. przedstawiono wybrane symbole styków elektrycznych
stosowanych w elektrotechnice. Styki z rys.1. noszą nazwę styków zwiernych lub
równoważnie styków normalnie otwartych (NO, ang. – normally opened). Styki te w
warunkach neutralnych (normalnych) pozostają rozwarte (nie przewodzą prądu) a zamykają
się pod wpływem działania czynnika aktywującego (dłoni operatora, najazdu krzywki,
przekroczenia ustalonego progu temperatury).
x
1
x
2
y
x
1
x
2
y
Katedra Automatyzacji Politechniki Lubelskiej.
Laboratorium Automatyki Przemysłowej. Materiały pomocnicze do ćwiczeń nr A1, A2, A3.
Opracował dr Paweł Staczek (ostatnia aktualizacja 21.02.2012)
4
Rys.1. Wybrane symbole elektrycznych styków
zwiernych (normalnie otwartych)
Rys.2. Wybrane symbole elektrycznych styków
rozwiernych (normalnie zamkniętych)
Styki przedstawione na rys.2. to styki rozwierne lub równoważnie styki normalnie
zamknięte (NZ, ang. NC – normally closed). Styki te w warunkach neutralnych (normalnych)
pozostają zwarte (przewodzą prąd) a otwierają się pod wpływem działania czynnika
aktywującego.
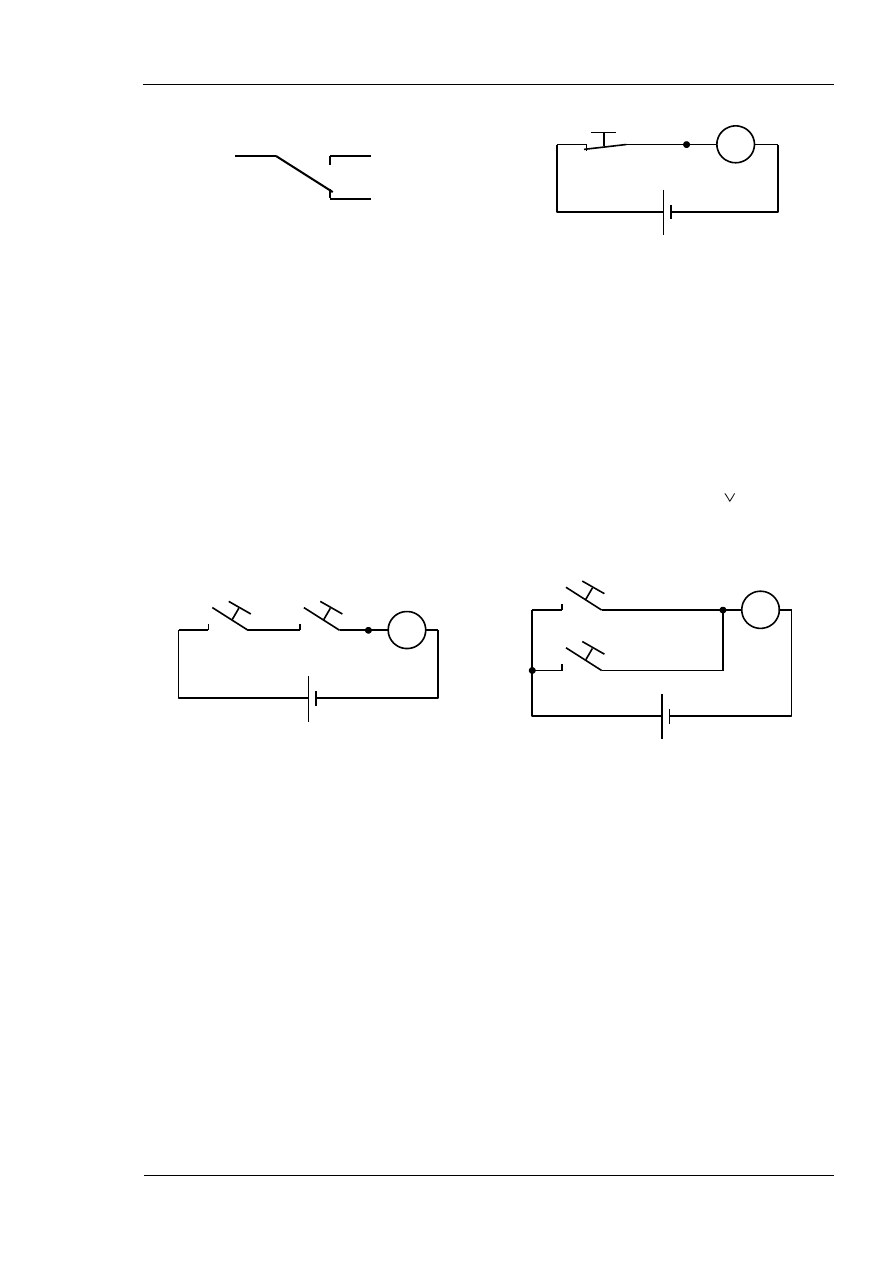
Istnieją także tzw. styki przełączne posiadające trzy odprowadzenia: NO, NC oraz
COM (z ang. common – wspólny) – rys.3. Styk przełączny nieaktywowany przewodzi prąd
pomiędzy odprowadzeniami COM i NC. Po aktywacji (przełączeniu) styku prąd
przewodzony jest między stykami COM i NO.
Na rys.4. przedstawiono styk rozwierny realizujący funkcję negacji (1). Jeżeli wartość
sygnału wejściowego (w tym wypadku położenia dłoni operatora nad przyciskiem) jest
nieaktywna (ma wartość logiczną „0”), to do punktu Y dopływa prąd i silnik pracuje (wyjście
w punkcie Y ma wartość logiczną „1”). Jeżeli sygnał wejściowy zmieni stan na „1” (przycisk
zostanie naciśnięty) to styki rozewrą się i w punkcie Y zaniknie napięcie zasilające (wartość
logiczna w punkcie Y wynosi „0”).
zamykane
przyciskiem
zamykane
pokrętłem
zamykane przez
nacisk na rolkę
zamykane po
przekroczeniu
progu temperatury
C
otwierane
przyciskiem
otwierane
pokrętłem
otwierane przez
nacisk na rolkę
otwierane po
przekroczeniu
progu temperatury
C
Katedra Automatyzacji Politechniki Lubelskiej.
Laboratorium Automatyki Przemysłowej. Materiały pomocnicze do ćwiczeń nr A1, A2, A3.
Opracował dr Paweł Staczek (ostatnia aktualizacja 21.02.2012)
5
Rys.3. Symbol elektrycznych styków
przełącznych
Rys.4. Przykład układu stycznikowego
realizującego funkcję negacji
W podobny sposób można zrealizować funkcję iloczynu logicznego (3) łącząc
szeregowo dwa styki normalnie otwarte – rys.5. Napięcie zasilające żarówkę pojawi się w
punkcie Y (stan logiczny „1”) tylko wtedy gdy jednocześnie naciśnięte zostaną dwa przyciski
P1 i P2.
Rys.6. demonstruje sposób realizacji funkcji sumy logicznej (2): Y = P1 P2.
Rys.5. Sposób realizacji funkcji iloczynu
logicznego z wykorzystaniem styków zwiernych
Rys.6. Układ stycznikowy realizujący funkcję
sumy logicznej
Styki elektryczne wraz z elektromagnesem je aktywującym tworzą przekaźnik
elektryczny – rys.7. Przekaźnik elektryczny ma zawsze jedną cewkę, może natomiast mieć
wiele sprzężonych ze sobą styków różnego rodzaju (NO, NC oraz przełącznych). Płynący
przez cewkę przekaźnika prąd powoduje jednoczesne przełączenie wszystkich styków.
Sprężyna powrotna przywraca normalne położenie styków przekaźnika po zaniku prądu
cewki.
Cewka przekaźnika oraz jego styki mogą być umiejscowione na schemacie
elektrycznym w różnych odległych od siebie miejscach (nawet na innych arkuszach
COM
NC
NO
P1
M
Y
+ -
Y
+ -
P2
M
P1
Y
+ -
M
P1
P2
Katedra Automatyzacji Politechniki Lubelskiej.
Laboratorium Automatyki Przemysłowej. Materiały pomocnicze do ćwiczeń nr A1, A2, A3.
Opracował dr Paweł Staczek (ostatnia aktualizacja 21.02.2012)
6
dokumentacji). O przynależności styków przekaźnika do cewki przekaźnika decyduje ich
identyczne oznaczenie (np. K1) – rys.8.
Rys.7. Wybrane symbole przekaźników
elektrycznych
Rys.8. Przekaźnik elektryczny w roli elementu
negującego
X
Y
W układach sterowniczych stosuje się napięcia bezpieczne (w przeciwieństwie do
części siłowej). Z reguły jest to 24V prądu stałego (rzadziej przemiennego). Jeżeli w danym
punkcie (na danym zacisku) układu sterowniczego panuje napięcie bliskie bądź równe 0V to
mówimy, że sygnał ma wartość logicznego zera „0” (fałsz). Napięcie bliskie bądź równe
napięciu zasilania układu (typowo 24V) oznacza, że sygnał ma wartość „1” (prawda).
Przekaźnik ze stykami NC może pełnić funkcję negacji – rys.8. Jeżeli sygnałem
wejściowym jest obecność napięcia sterowniczego na zacisku X, to obecność napięcia
zasilającego na zacisku Y jest równe
X
. Sygnał wejściowy doprowadzony do zacisku X może
pochodzić ze styków: przycisku sterowniczego, wyłącznika termicznego, innego przekaźnika
itp. Od zacisku wyjściowego Y sygnał (prąd) może przepływać do urządzenia wykonawczego
(silnika, elektrozaworu itp.) lub do cewki przekaźnika realizującego na przykład kolejną
funkcję logiczną w układzie przełączającym.
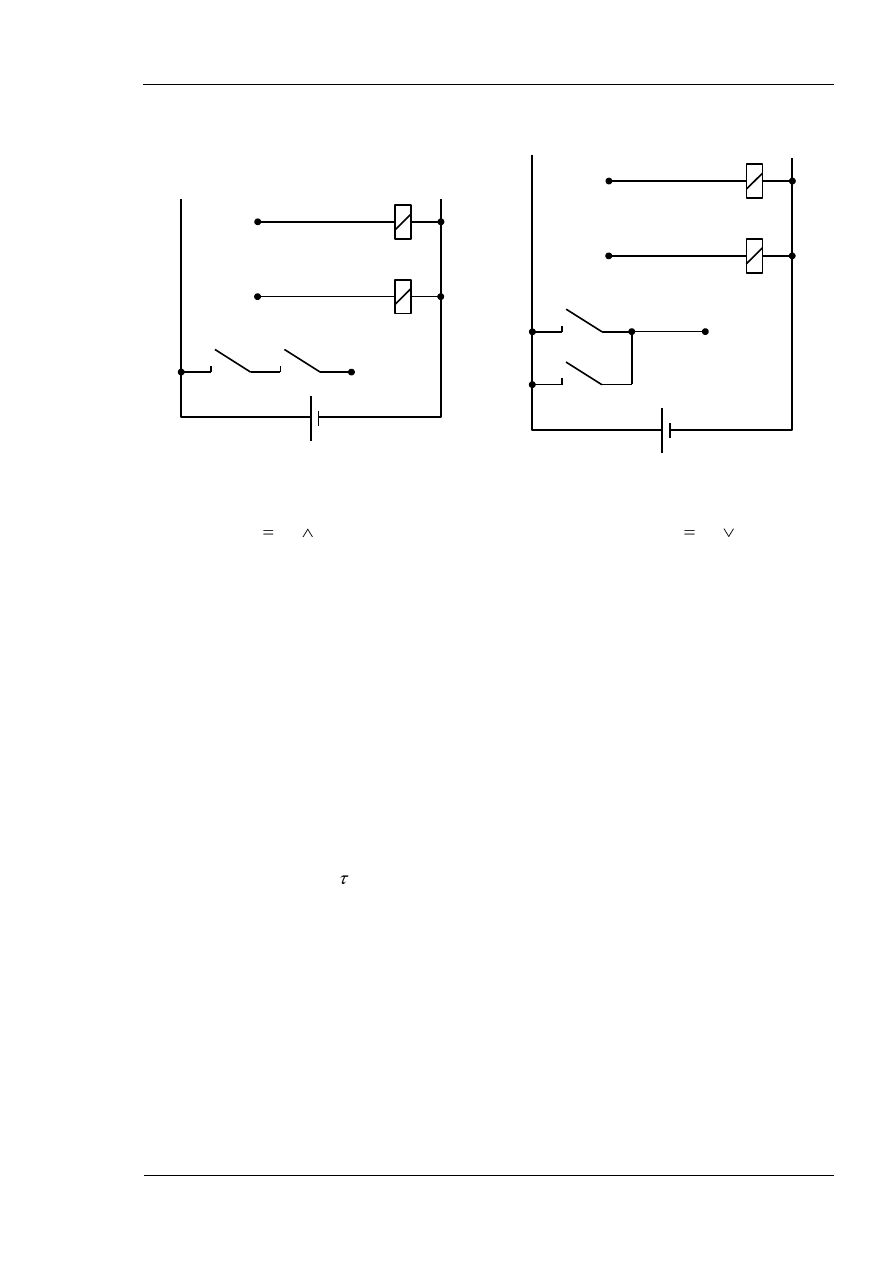
Na rys.9. oraz 10. przedstawiono schematy układów przekaźnikowych realizujących
funkcje iloczynu oraz sumy logicznej.
cewka
styk
(styki)
K1
K2
Y
+ -
K1
X
K1
M
Katedra Automatyzacji Politechniki Lubelskiej.
Laboratorium Automatyki Przemysłowej. Materiały pomocnicze do ćwiczeń nr A1, A2, A3.
Opracował dr Paweł Staczek (ostatnia aktualizacja 21.02.2012)
7
Rys.9. Sposób realizacji funkcji iloczynu
logicznego
2
1
X
X
Y
z wykorzystaniem
przekaźników
Rys.10. Układ przekaźnikowy realizujący funkcję
sumy logicznej
2
1
X
X
Y
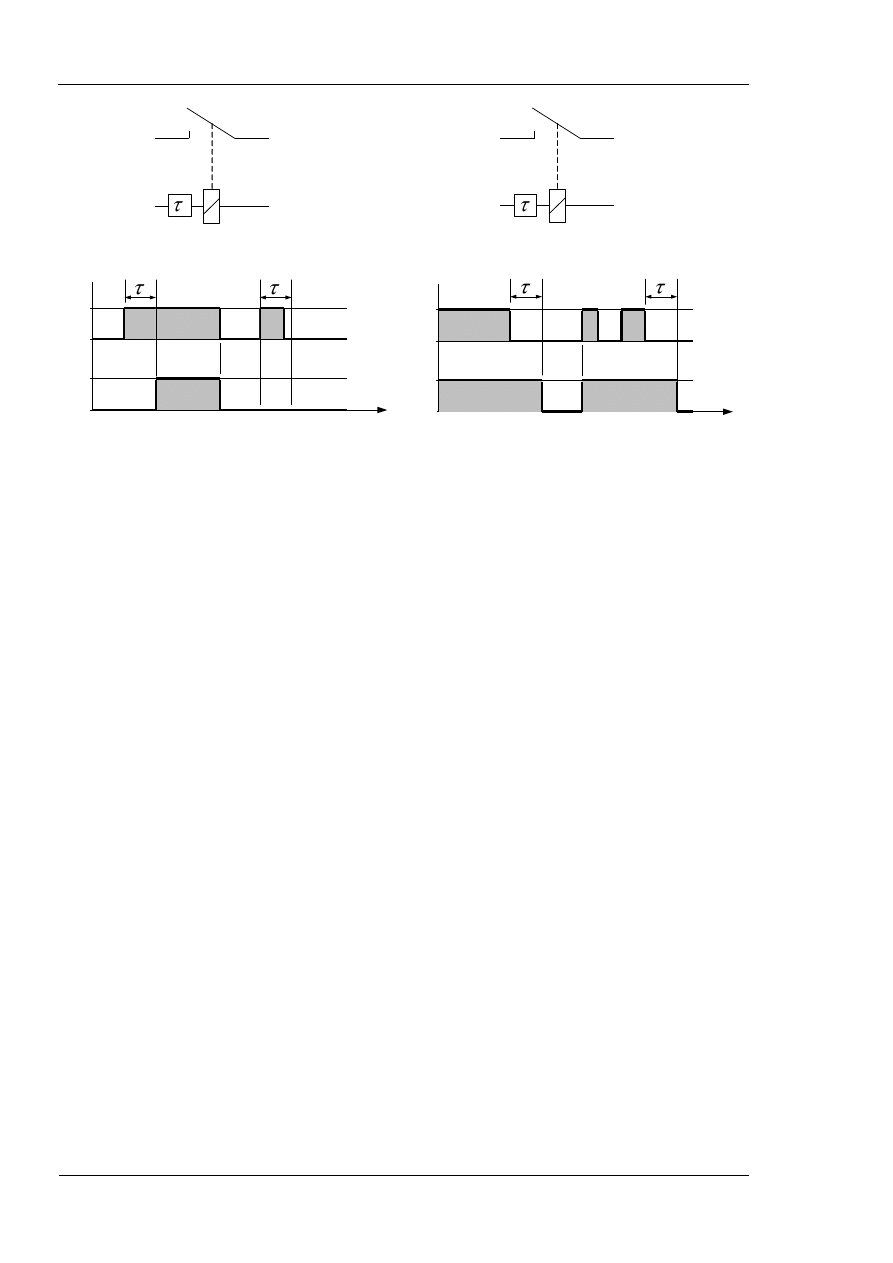
Przekaźniki czasowe
Przekaźniki elektryczne, w których położenie styków zależy zarówno od sygnału
zasilania cewki jak i od czasu nazywane są przekaźnikami czasowymi. Najczęściej stosowane
w układach automatyki przekaźniki czasowe realizują następujące funkcje:
opóźnione załączanie (ang. Delay–On),
opóźnione wyłączanie (ang. Delay–Off).
Symbole oraz sposób działania przekaźników czasowych przedstawiono na rys.11.
oraz 12. Czas opóźnienia może być zmieniany przy pomocy pokrętła lub potencjometru na
obudowie przekaźnika. Przekaźniki z funkcją opóźnionego wyłączania wymagają ciągłego
zasilania (niezależnie od sygnału wejściowego).
Y
+ -
K2
X
2
K1
K1
X
1
K2
Y
+ -
K2
X
2
K1
X
1
K2
K1
Katedra Automatyzacji Politechniki Lubelskiej.
Laboratorium Automatyki Przemysłowej. Materiały pomocnicze do ćwiczeń nr A1, A2, A3.
Opracował dr Paweł Staczek (ostatnia aktualizacja 21.02.2012)
8
Rys.11. Symbol oraz diagram działania
przekaźnika czasowego typu „opóźnione
załączanie”
Rys.12. Symbol oraz diagram działania
przekaźnika czasowego typu „opóźnione
wyłączanie”
t
0
1
wy
(R)
0
1
we
(U)
DELAY-ON
U
R
Kt3
DELAY-OFF
t
0
1
wy
(R)
0
1
we
(S)
S
R
Kt4

Katedra Automatyzacji Politechniki Lubelskiej.
Laboratorium Automatyki Przemysłowej. Materiały pomocnicze do ćwiczeń nr A1, A2, A3.
Opracował dr Paweł Staczek (ostatnia aktualizacja 21.02.2012)
9
II. Programowalny sterownik logiczny (PLC)
Programowalne sterowniki logiczne (z ang. Programmable Logic Controller – PLC)
to rodzina urządzeń cyfrowych przeznaczonych do realizacji złożonych układów
przełączających. Pierwsze urządzania tego typu opracowane zostały dla potrzeb
przemysłowych układów automatyki, gdzie były wykorzystywane do sterowania pracą
maszyn, przebiegiem procesów oraz całych ciągów technologicznych. Z czasem sterowniki
PLC upowszechniły się także w innych obszarach gospodarki, między innymi w układach
automatyki budynków, domów jednorodzinnych a nawet mieszkań (np. programowalne
centrale alarmowe).
Podstawowym przeznaczeniem sterownika PLC jest realizacja układów
przełączających (kombinacyjnych i sekwencyjnych) budowanych dotąd tradycyjnie na
elementach łączeniowych (stykach i przekaźnikach). Charakterystyczną cechą sterowników
jest to, że układ logiczny realizujący daną funkcję (algorytm sterowania) jest zapisany w
pamięci sterownika pod postacią wirtualnego układu stycznikowego i jest przetwarzany przez
mikroprocesor. W ten sposób urządzenie wielkości tostera może pod względem
funkcjonalnym zastąpić dużą tradycyjną szafę sterowniczą.
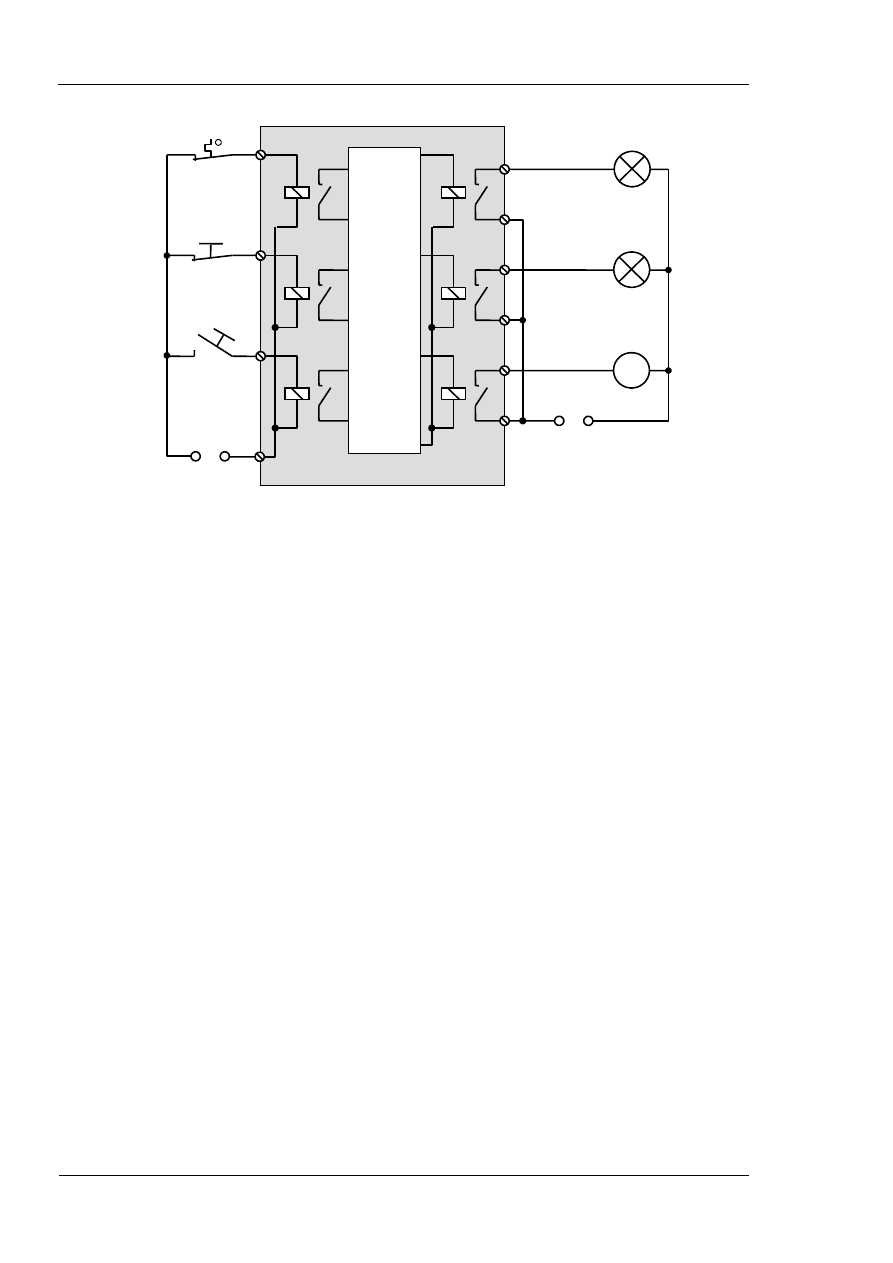
Sterownik PLC wyposażony jest w zestaw wejść, do których przyłączane są dyskretne
(dwustanowe) sygnały elektryczne – rys.II.1. Analogicznie jak w przypadku przełączających
układów stycznikowych źródłem tych sygnałów mogą być: styki przycisków sterowniczych,
wyłączniki drogowe ruchomych części maszyn, sygnalizatory graniczne (poziomu, termiczne,
ciśnienia) itp. Sterownik przetwarza te sygnały zgodnie z wirtualnym algorytmem (układem
przełączającym) zapisanym w jego pamięci i udostępnia rezultaty poprzez swoje wyjścia,
którymi na ogół są styki przekaźników elektrycznych wewnątrz sterownika (rys.II.1.). Do
zacisków styków wyjściowych sterownika podłączane są z reguły urządzenia wykonawcze,
np. silniki, elektrozawory, grzejniki, klimatyzatory, oświetlenie itp.
Katedra Automatyzacji Politechniki Lubelskiej.
Laboratorium Automatyki Przemysłowej. Materiały pomocnicze do ćwiczeń nr A1, A2, A3.
Opracował dr Paweł Staczek (ostatnia aktualizacja 21.02.2012)
10
PLC
24
V
P 1
(
START
)
I
0
0
V
P 2
(
STOP
)
I
1
I
2
Q
0
Q
1
Q
2
u
P
~
230
V
M
L 1
(
GOTOWY
)
C
F 1
(
PRZEGRZANIE
)
L 2
(
PRZEGRZANIE
)
Rys.II.1. Przykładowy układ sterowania z programowalnym sterownikiem logicznym (PLC)
Słowo programowalny w nazwie sterowników PLC oznacza, że funkcja układu
przełączającego realizowanego przez PLC może być z zasady dowolna i zależy właśnie od
sposobu zaprogramowania przez projektanta układu automatyki.
Najpopularniejszym językiem programowania sterowników jest diagram drabinkowy
(z ang. Ladder Diagram – LD). Programowanie w tym języku przypomina projektowanie
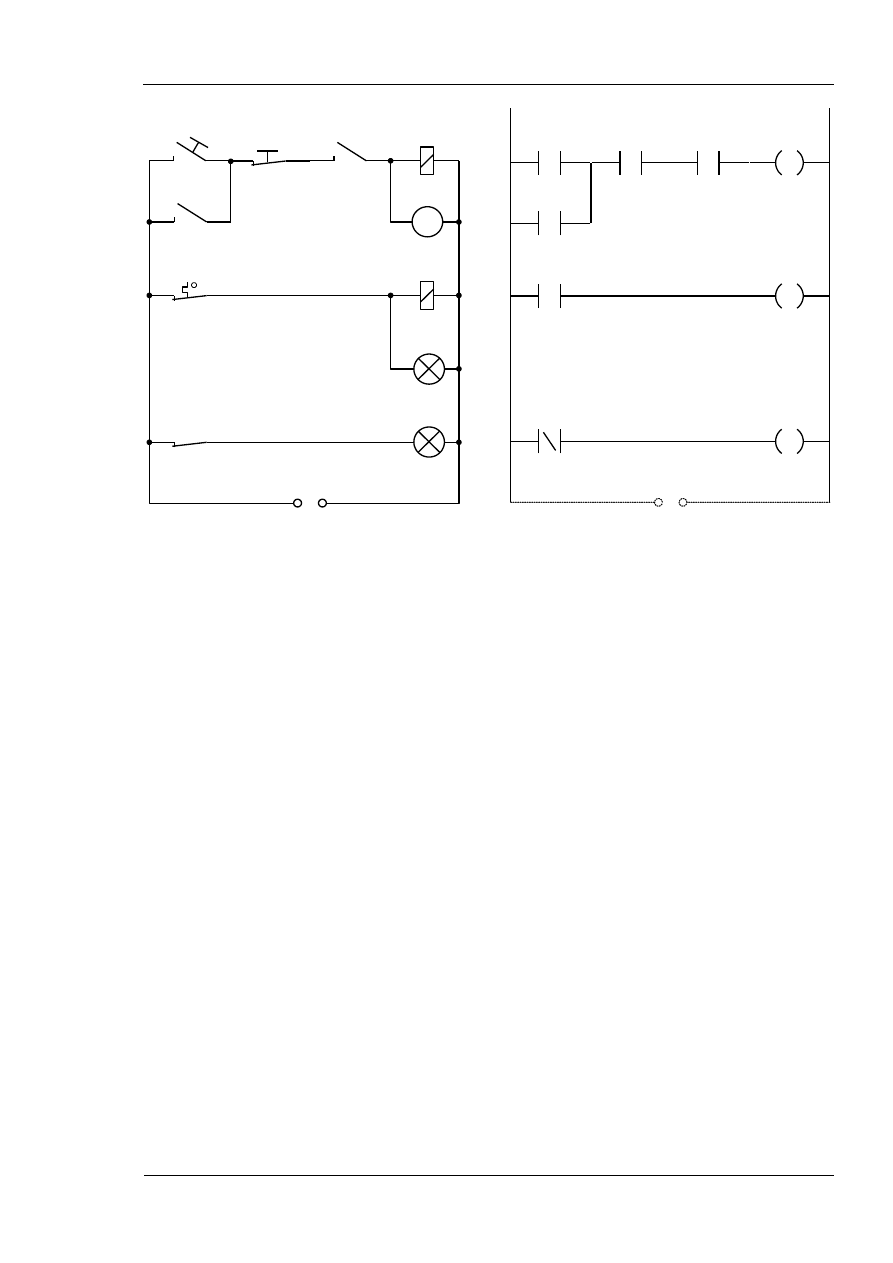
przełączającego układu stycznikowego. Na rys.II.2. przedstawiono schemat przykładowego
układu przełączającego zrealizowanego w technice stycznikowej. Rys.II.3. przedstawia
funkcjonalnie równoważny mu diagram drabinkowy przy założeniu, że elementy układu
połączone są zgodnie z rys.II.1.
Katedra Automatyzacji Politechniki Lubelskiej.
Laboratorium Automatyki Przemysłowej. Materiały pomocnicze do ćwiczeń nr A1, A2, A3.
Opracował dr Paweł Staczek (ostatnia aktualizacja 21.02.2012)
11
Rys.II.2. Układ przełączający zrealizowany w
technice stycznikowej
Rys.II.3. Diagram drabinkowy w pamięci
sterownika z rys.II.1. funkcjonalnie równoważny
układowi przełączającemu z rys.II.2
Podstawowe elementy diagramu drabinkowego
Diagram drabinkowy jest w istocie wirtualnym układem elektrycznym
(stycznikowym) złożonym z elementów przedstawionych w tab. II.1. Elementy łączy się
wirtualnymi przewodami elektrycznymi na wyświetlaczu sterownika lub na ekranie
komputera pełniącego rolę programatora. Dwie pionowe linie diagramu drabinkowego
(rys.II.3) symbolizują przewody elektryczne z napięciem sterowniczym (np. linia lewa – 24V,
linia prawa – 0V).
Przekaźniki wejściowe sterowników PLC (w skrócie wejścia) przeznaczone do
podłączania sygnałów dyskretnych oznaczane są typowo dużą literą I (z ang. Input – wejście),
po której widnieje numer kolejny wejścia, np. I0, I1, I2, ... I9, Ia, Ib, ... If. Oznaczenia a, b, c
... f są notacją liczb 10, 11, 12 ... 15 w systemie szesnastkowym. Niektórzy producenci
urządzeń stosują konwencję oznaczeń ze znakiem „%”: %I0, %I1, %I2, ...
Na rys.II.1. przedstawiono układy wejściowe wewnątrz sterownika w postaci
przekaźników elektrycznych (In). W rzeczywistości stosuję się tam układy
półprzewodnikowe (transoptory) jednak takie ich przedstawienie ułatwia zrozumienie działa
wejść sterownika.
P1
(START)
P2
(STOP)
K1
K1
L2
(PRZEGRZANIE)
C
F1
(PRZEGRZANIE)
K2
M
~230V
K2
K2
L1
(GOTOWY)
I
2
(PRZEGRZANIE)
I
0
(START)
I
1
(STOP)
Q
0
(SILNIK)
Q
0
(SILNIK)
Q
1
(PRZEGRZANIE)
I
2
(PRZEGRZANIE)
Q
2
(GOTOWY)
I
2
(PRZEGRZANIE)
24V 0V
Katedra Automatyzacji Politechniki Lubelskiej.
Laboratorium Automatyki Przemysłowej. Materiały pomocnicze do ćwiczeń nr A1, A2, A3.
Opracował dr Paweł Staczek (ostatnia aktualizacja 21.02.2012)
12
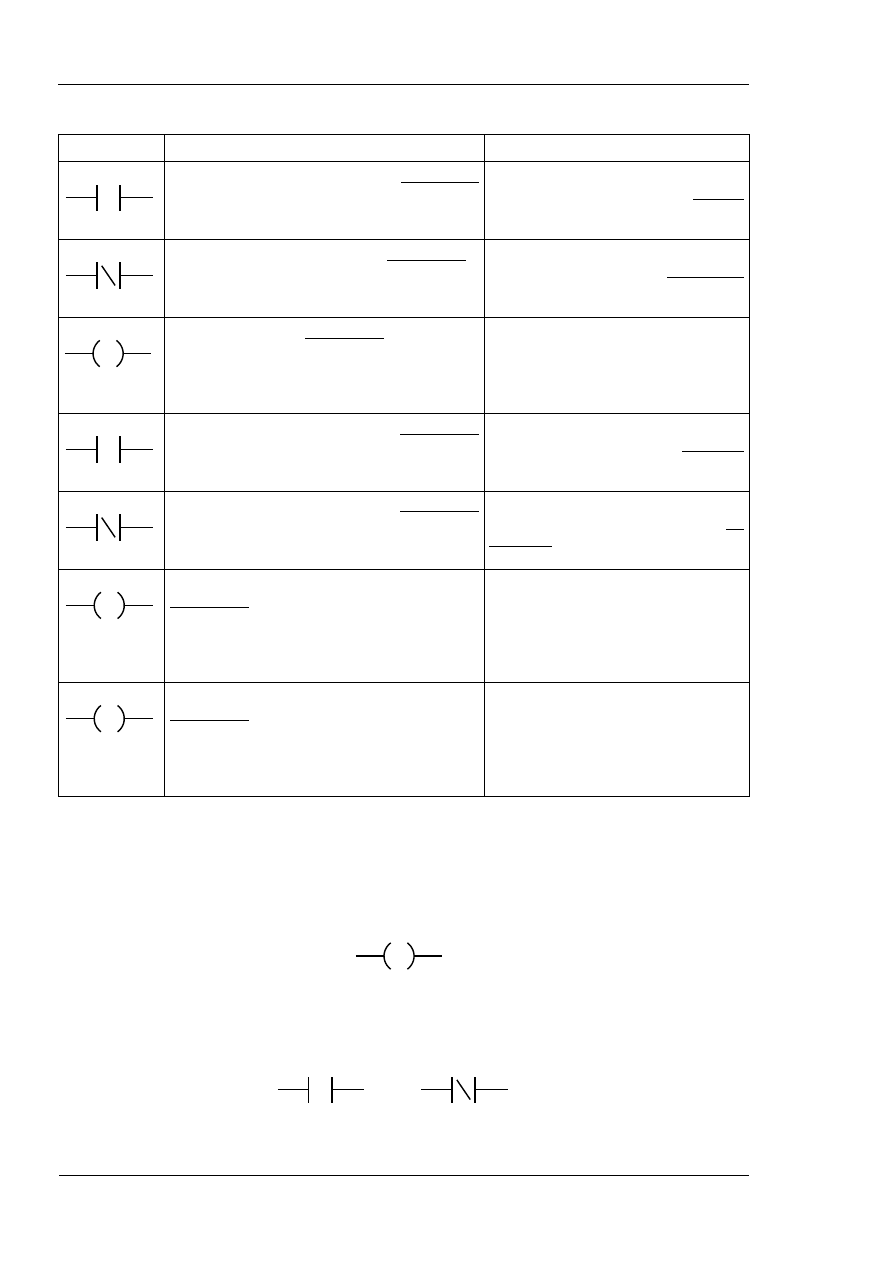
Tab.II.1. Podstawowe elementy języka drabinkowego
Symbol
Opis
Działanie
Styki zwierne (NO) przekaźnika wejściowego
sterownika (układu wejściowego) o numerze n
Symbol przewodzi prąd jeśli do zacisku
wejściowego In sterownika dopływa
napięcie sterownicze
Styki rozwierne (NC) przekaźnika wejściowego o
numerze n
Symbol przewodzi prąd jeśli do zacisku
wejściowego In sterownika nie dopływa
napięcie sterownicze
Cewka przekaźnika wyjściowego sterownika o
numerze n
Jeżeli przez symbol „przepływa prąd”
(dociera „napięcie”) to styki zwierne
(NO)
przekaźnika
wyjściowego
n
zamykają się, a styki rozwierne (NC)
otwierają się
Styki zwierne (NO) przekaźnika wyjściowego
sterownika o numerze n
Symbol przewodzi prąd jeśli przez cewkę
przekaźnika wyjściowego Qn „przepływa
prąd”
Styki rozwierne (NC) przekaźnika wyjściowego
sterownika numerze n
Symbol przewodzi prąd jeśli przez cewkę
przekaźnika wyjściowego Qn „nie
przepływa prąd”
Wejście
Set
(załączające)
przekaźnika
wyjściowego sterownika o numerze n
Jeżeli przez symbol „popłynie prąd” to
styki
zwierne
(NO)
przekaźnika
wyjściowego n zamykają się, a styki
rozwierne (NC) otwierają się i zostają w
tych położeniach nawet po zaniku prądu
(patrz także wejście Reset poniżej)
Wejście
Reset
(wyłączające)
przekaźnika
wyjściowego sterownika o numerze n
Jeżeli przez symbol „popłynie prąd” to
styki
zwierne
(NO)
przekaźnika
wyjściowego n otwierają się, a styki
rozwierne (NC) zamykają się i zostają w
tych położeniach nawet po zaniku prądu
(patrz także wejście Set powyżej)
Przekaźniki wyjściowe sterowników PLC oznacza się literą Q oraz numerem
kolejnym: Q0, Q1, Q2.... (ewentualnie %Q0, %Q1, %Q2...). Należy podkreślić, że przekaźnik
Qn składa się zarówno z cewki:
jak i ze styków oznaczonych także Qn (analogicznie jak w tradycyjnych układach
stycznikowych):
I
n
I
n
Q
n
Q
n
Q
n
S
Q
n
Q
n
R
Q
n
Q
n
Q
n
Katedra Automatyzacji Politechniki Lubelskiej.
Laboratorium Automatyki Przemysłowej. Materiały pomocnicze do ćwiczeń nr A1, A2, A3.
Opracował dr Paweł Staczek (ostatnia aktualizacja 21.02.2012)
13
Specjalnego wyjaśnienia wymaga stosowanie symbolu styków skojarzonych z
wejściami sterownika In. Styki wejściowe In należy rozumieć jako styki elektryczne
wirtualnych przekaźników wewnątrz sterownika (w rzeczywistości są tam transoptory)
przełączane napięciem elektrycznym przyłożonym do zacisku wejściowego sterownika (tj. do
cewki wirtualnego przekaźnika In) – patrz także rys. II.1. NIE NALEŻY zatem utożsamiać
symbolu „styków wejściowych” In (NO lub NC) z rzeczywistym stykiem elektrycznym
podłączonym do wejścia sterownika!
Znając podstawy programowania w diagramie drabinkowym przeanalizowane
zostanie działanie przykładowego układu przełączającego, którego schemat tradycyjny
(przekaźnikowy) przedstawia rys.II.2. natomiast odpowiednik „wirtualny” rys.II.3.
(połączenia ze sterownikiem według rys.II.1). Sygnałami wejściowymi do obu układów są:
przycisk P1 (START) ze stykami zwiernymi, którego naciśnięcie załącza w sposób trwały
silnik elektryczny M (silnik ma pracować także po zwolnieniu przycisku P1),
przycisk P2 (STOP) ze stykami rozwiernymi wyłączający zasilanie silnika (przycisk
STOP ma priorytet wyższy niż przycisk START – naciśnięte jednocześnie powodują
wyłączenie silnika),
wyłącznik termiczny silnika F1 ze stykami rozwiernymi – rozwarcie styków w wyniku
przegrzania silnika wyłącza zasilanie silnika (wyłącznik F1 ma priorytet wyższy niż
przycisk START – zadziałanie wyłącznika z jednocześnie przyciśniętym przyciskiem
START powoduje wyłączenie silnika).
Sygnałami wyjściowymi z rozważanych układów są:
zasilanie silnika elektrycznego M,
lampka kontrolna L1 (GOTOWY), która świeci gdy styki wyłącznika termicznego F1 są
zamknięte,
lampka kontrolna L2 (PRZEGRZANIE), która świeci gdy styki wyłącznika termicznego
F1 są otwarte.
W układzie stycznikowym funkcja „podtrzymania” stanu załączenia silnika
zrealizowana jest przez przekaźnik K1 (styki zwierne K1 połączone równolegle z P1).
Analogicznie jest w diagramie drabinkowym – rolę „podtrzymania” pełni styk przekaźnika
wyjściowego Q0.
Lampka L2 (GOTOWY) zasilana jest bezpośrednio ze styków normalnie zamkniętych
wyłącznika F1. W przypadku diagramu drabinkowego styki zwierne wejścia I2 są zamknięte
jeśli do zacisku wejściowego dopływa napięcie przez zamknięte styki F1. Zamknięte styki I2
„zasilają” cewkę przekaźnika wyjściowego Q2 i lampka L2 świeci. UWAGA! Często
Katedra Automatyzacji Politechniki Lubelskiej.
Laboratorium Automatyki Przemysłowej. Materiały pomocnicze do ćwiczeń nr A1, A2, A3.
Opracował dr Paweł Staczek (ostatnia aktualizacja 21.02.2012)
14
popełnianym błędem jest utożsamianie styków wirtualnego przekaźnika wejściowego
(I2) z rzeczywistym stykiem fizycznie podłączonym do wejścia sterownika (F1) i
machinalne zastosowanie styków normalnie zamkniętych I2
zamiast
zwiernych
. Takie rozumowanie prowadzi do błędnego działania układu!
W układzie stycznikowym przekaźnik K2 realizuje funkcję negacji sygnału z
wyłącznika termicznego F1 (lampka L2 nie świeci jeśli styki F1 są zamknięte). W diagramie
drabinkowym do tej samej roli wykorzystano rozwierne styki wejścia I2.
Katedra Automatyzacji Politechniki Lubelskiej.
Laboratorium Automatyki Przemysłowej. Materiały pomocnicze do ćwiczeń nr A1, A2, A3.
Opracował dr Paweł Staczek (ostatnia aktualizacja 21.02.2012)
15
III. PYTANIA KONTROLNE
1. Co to są układy przełączające w automatyce?
2. Wyjaśnij różnice między przełączającymi układami kombinacyjnymi a sekwencyjnymi.
3. Podaj tabelę prawdy dla następującej funkcji logicznej:
3
2
1
)
(
x
x
x
y
.
4. Narysuj schemat układu logicznego z poprzedniego polecenia używając symboli
podstawowych bramek logicznych.
5. Narysuj schemat elektryczny układu stycznikowego realizującego funkcję podaną w
poleceniu 3. Niech wejściami do układu będą stany przycisków ze stykami zwiernymi lub
rozwiernymi (do wyboru) a wyjściem zaświecenie lampki kontrolnej.
6. Narysuj schemat elektryczny układu stycznikowego realizującego funkcję podaną w
poleceniu 3 przy założeniu, że wszystkie przyciski wejść mają tylko styki zwierne.
7. Narysuj diagram drabinkowy realizujący funkcję logiczną z polecenia 3. Niech przyciski
wejść mają styki zwierne i są podłączone odpowiednio do wejść I1, I2, I3. Lampka
kontrolna (wyjście) podłączona jest do styków przekaźnika wyjściowego Q0.
8. Narysuj diagram czasowy wyjaśniający działanie przekaźnika czasowego z funkcją
opóźnione załączanie (Delay-Off).
9. Objaśnij działanie elementów diagramu drabinkowego:
Q
n
S
oraz
Q
n
R
.
LITERATURA
1. Waligórski S.: Układy przełączające. Elementy teorii i projektowanie
2. Grodzki L.: Podstawy techniki cyfrowej
3. Siwiński J.: Układy przełączające w automatyce
4. Flaga S.: Programowanie Sterowników PLC w języku drabinkowym
5. Jegierski T., Wyrwał J., Kasprzyk J., Hajda J.: Programowanie sterowników PLC
6. Ruda A.: Sterowniki programowalne PLC
Wyszukiwarka
Podobne podstrony:
(Ćw nr 3,4) PA Lab UKLADY PRZELACZAJACE WPROWADZENIE
(Ćw nr 2) PA Lab CHARAKT PRZETW SREDNICH CISNIEN
(Ćw nr 5) PA Lab KOMP SYSTEM MONITORINGU GENIE
(Ćw nr 1) PA Lab SILOWNIK MEMBRANOWY Z USTAWNIKIEM
(Ćw nr 1) PA Lab SILOWNIK MEMBRANOWY Z USTAWNIKIEM
(Ćw nr 2) PA Lab CHARAKT PRZETW SREDNICH CISNIEN
Ćw nr 24, Lab fiz 24, Ćwiczenie 43
cw nr 4 układy krwionośny i oddechowy kregowców
E 08 - Uklady przelaczajace, Ćwiczenie nr: 8 Podstawowe układy przełączające
PSYCHOLOGIA PAMIĘCI I UCZENIA ćw nr 1 Wprowadzenie do psychologii pamięci Jagodzińska [115 148]
Podstawy Automatyki Lab 2014 CW1 Układy przełączające oparte na elementach stykowych
Podstawy Automatyki Lab CW1 Układy przełączając
Ćw 3 Kombinacyjne i sekwencyjne układy przełączające oparte na elementach bezstykowych – symulacja
więcej podobnych podstron