Wprowadzenie do mechatroniki /
Podstawy mechatroniki
Wykład 4 Sensoryka
dr inż. Jarosław Adamiec
jaroslaw.adamiec@put.poznan.pl
pok. 736 (BM) tel. (61) 665 22 54
konsultacje:
WT 11:30 - 12:30

Czujniki, wykorzystywane w maszynach,
odpowiadają zmysłom człowieka. Są
instrumentami, które dostarczają informacji
o stanie samej maszyny i jej otoczenia. Ale
interesującą nas informację nie zawsze można
bezpośrednio ująć za pomocą czujników. Taka
sytuacja może mieć miejsce na przykład wtedy,
gdy mierzony sygnał jest skażony
zakłóceniami, gdy kontrolowana wielkość nie
Sensoryka
2012-12-01 22:00
2
Podstawy mechatroniki Wykład 4 Sensoryka
daje się przetworzyć na sygnał elektryczny, a także wtedy, gdy z
powodu ograniczeń kosztowych lub przestrzennych nie daje się
wykorzystać niezbędnego czujnika. Jeżeli w takich przypadkach
wiemy jak obiekt reaguje na zakłócenia, to za pomocą
odpowiednich obliczeń można ocenić interesujący nas sygnał.
Czujniki w urządzeniach mechatroni-
cznych mierzą wielkości sterowane, steru-
jące, zakłócające itp.. Mogą to być pomiary
bezpośrednie lub pośrednie. W tym drugim
przypadku chodzi o oszacowanie tych wiel-
kości na podstawie innych wielkości, za po-
mocą tzw. algorytmu obserwatora. W obwo-
dach sterowania ze sprzężeniem zwrotnym
czujniki są niezbędne. Istota takich obwo-
dów polega bowiem na obróbce sygnału, po-
chodzącego od czujnika, w celu uzyskania
informacji potrzebnej do bezpośredniego
sterowania układem mechanicznym.
Sensoryka
2012-12-01 22:00
3
Podstawy mechatroniki Wykład 4 Sensoryka
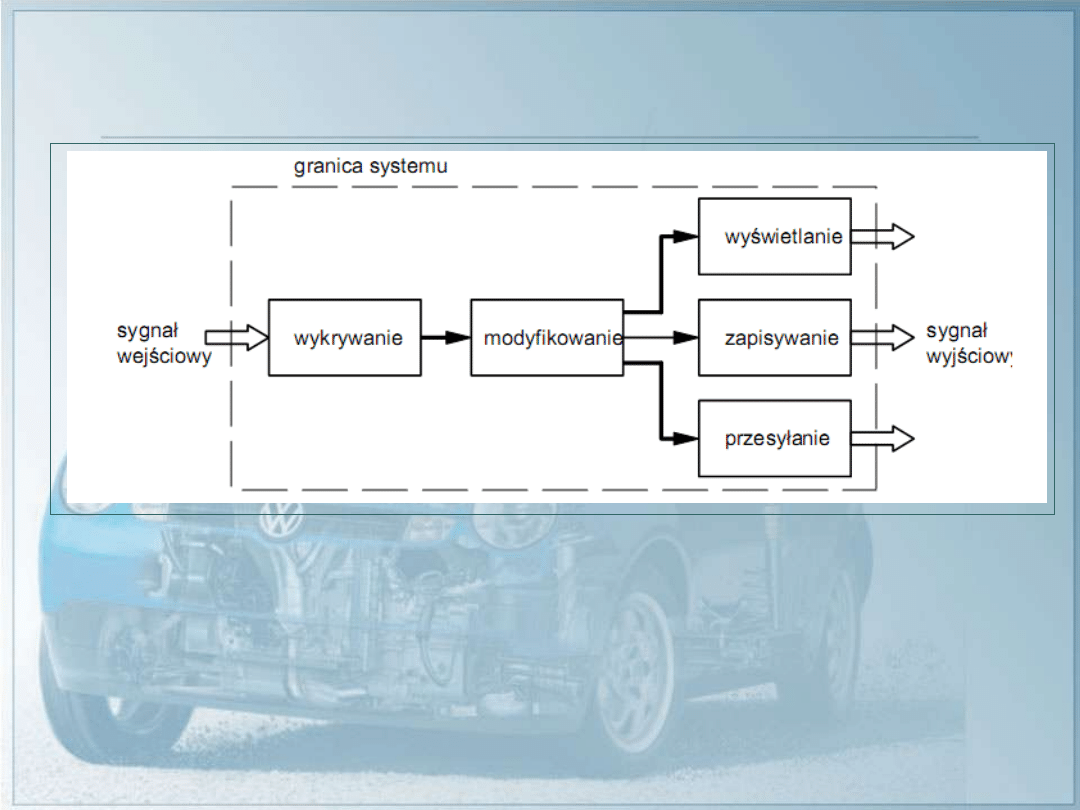
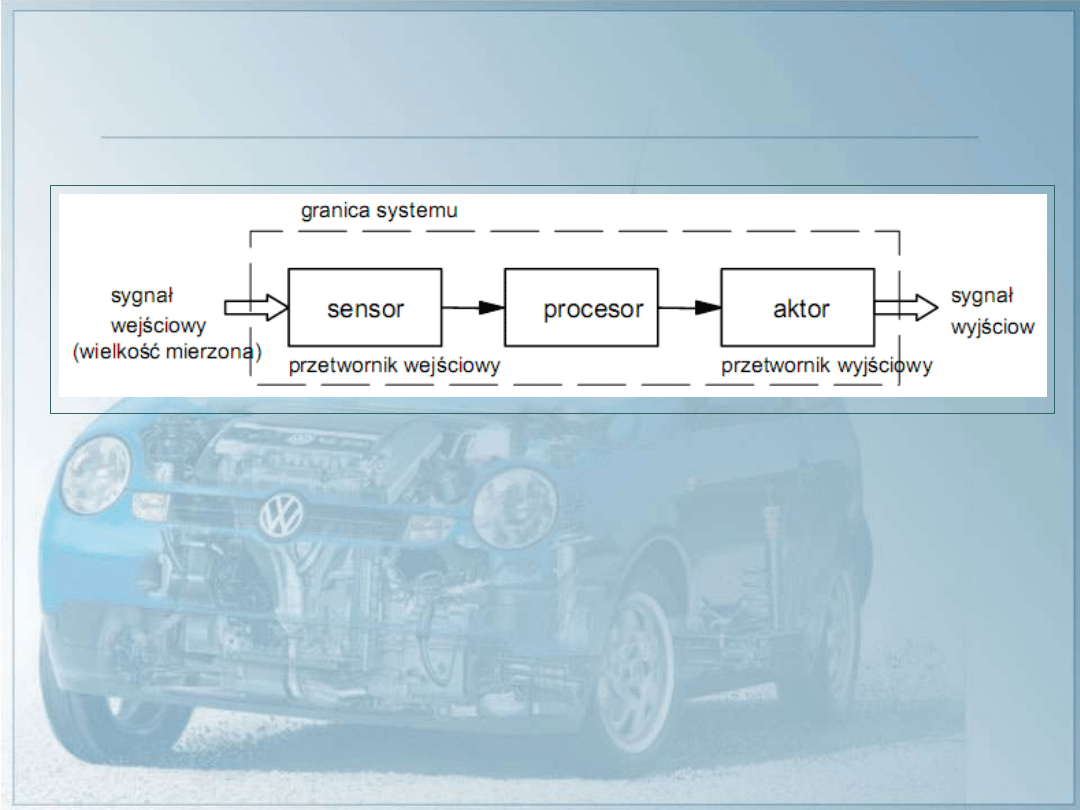
Rysunek przedstawia podstawowe funkcje systemu pomia-
rowego. Sygnałem wejściowym jest wielkość fizyczna, która ma
być mierzona. Wielkość mierzona jest „wyczuwana” przez
obiekt, zwykle nazywany
przetwornikiem wejściowym lub
sensorem. Sensor odbiera wartości mechaniczne, chemiczne,
termiczne lub optyczne i przetwarza je w sygnały elektryczne.
System pomiarowy jako system
przetwarzania informacji
2012-12-01 22:00
4
Podstawy mechatroniki Wykład 4 Sensoryka
Większość sygnałów, pochodzących z czujników, ma naturę
analogową. W takim przypadku konieczne jest analogowe
przetwarzanie sygnału. Często przydatne jest rozróżnianie
między główną jednostką przetwarzania (np. mikroprocesor)
i jednostką przygotowania sygnału (np. wzmacniacz, filtr czy
przetwornik analogowo-cyfrowy).
Na koniec sygnał z procesora jest stosowany do wyświetlania
niektórych informacji operatorowi, np. na ekranie. Alternatywnie
sygnał może być zapisywany, np. na papierze, dyskietce
magnetycznej czy w kostce obwodu scalonego (RAM, EPROM
itd.). Każde urządzenie, które przetwarza sygnał elektryczny w
nieelektryczną wielkość fizyczną jest nazywane aktorem
(aktuatorem) lub przetwornikiem wyjściowym.
System pomiarowy jako system
przetwarzania informacji
2012-12-01 22:00
5
Podstawy mechatroniki Wykład 4 Sensoryka
Oczywiście
może
istnieć
wiele
poziomów
w
systemie
przetwarzania informacji. Rysunek pokazuje jego
najbardziej
podstawowe składowe: sensor, procesor sygnału (włączając
preprocesor) i aktor.
System pomiarowy jako system
przetwarzania informacji
2012-12-01 22:00
6
Podstawy mechatroniki Wykład 4 Sensoryka
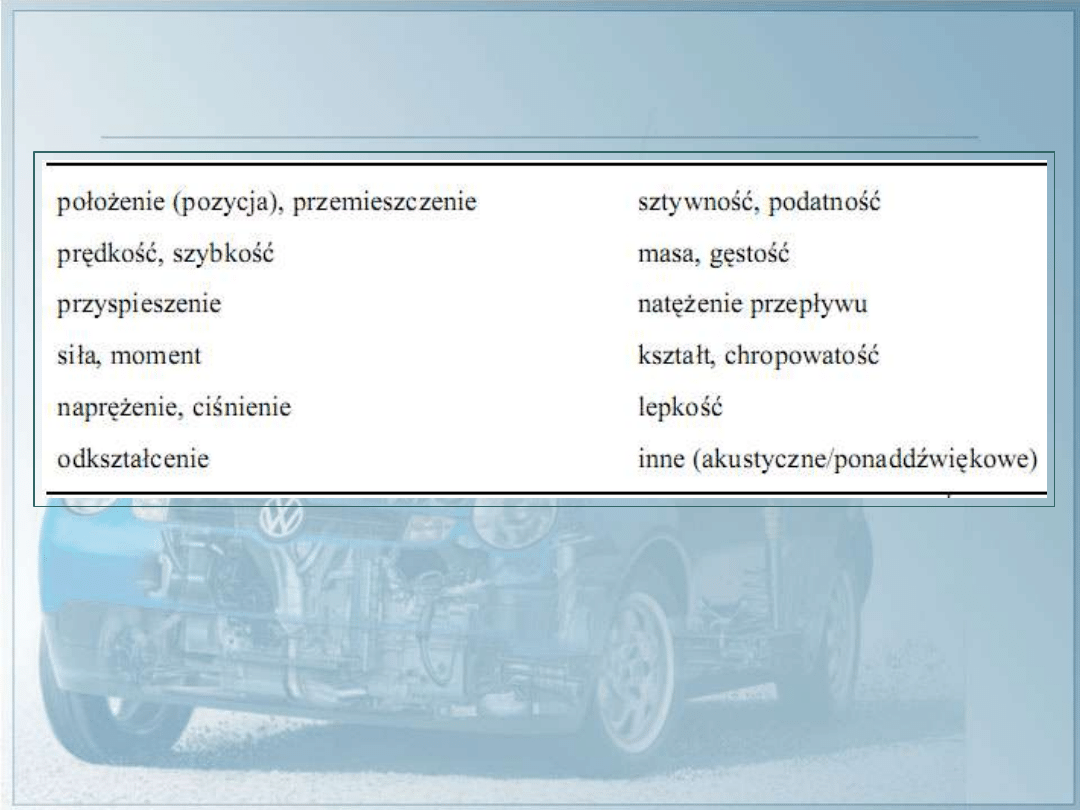
Mechanicznych wielkości pomiarowych jest dużo. Najważniejsze
z nich przedstawia tabela powyżej. Wielkości te są używane
często
do
definiowania
najważniejszych
klas
sensorów
mechanicznych.
Mechaniczne wielkości pomiarowe i
klasyfikacja urządzeń sensorycznych
2012-12-01 22:00
7
Podstawy mechatroniki Wykład 4 Sensoryka
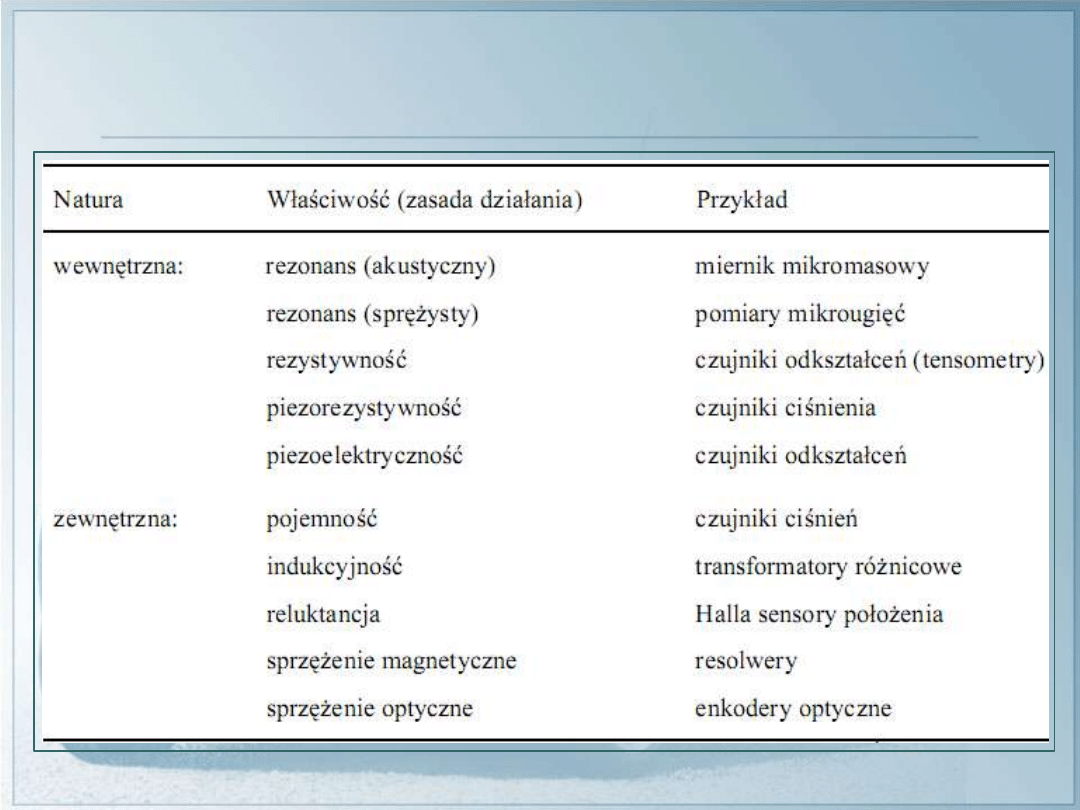
Sensory klasyfikuje się w zależności od funkcji jaką wykonują
(tzn. do mierzenia czego służą), lub od ich zasady działania (np.
indukcyjne,
optoelektroniczne
itp.).
Zwykłym
kryterium
klasyfikacji jest rodzaj energii, którą niesie sygnał (mechaniczna,
cieplna, elektryczna, promieniowania itd.). Dla konstruktora
urządzenia
mechatronicznego
istotna
jest
klasyfikacja
funkcjonalna. Chce on przede wszystkim wiedzieć o różnych
rodzajach sensorów, np. do pomiaru przemieszczenia, a nie o
ukrytych zasadach ich działania. Jest to bardziej praktyczne.
Taka klasyfikacja może być również używana do klasyfikowania
rodzajów aktorów używanych w systemach mechatronicznych.
Mechaniczne wielkości pomiarowe i
klasyfikacja urządzeń sensorycznych
2012-12-01 22:00
8
Podstawy mechatroniki Wykład 4 Sensoryka
Mechaniczne wielkości pomiarowe i
klasyfikacja urządzeń sensorycznych
2012-12-01 22:00
9
Podstawy mechatroniki Wykład 4 Sensoryka
Czujniki
indukcyjne
stanowią
najpopularniejszą
grupę
czujników
stosowanych
w
układach
automatyki.
Wykorzystywane są one do kontroli
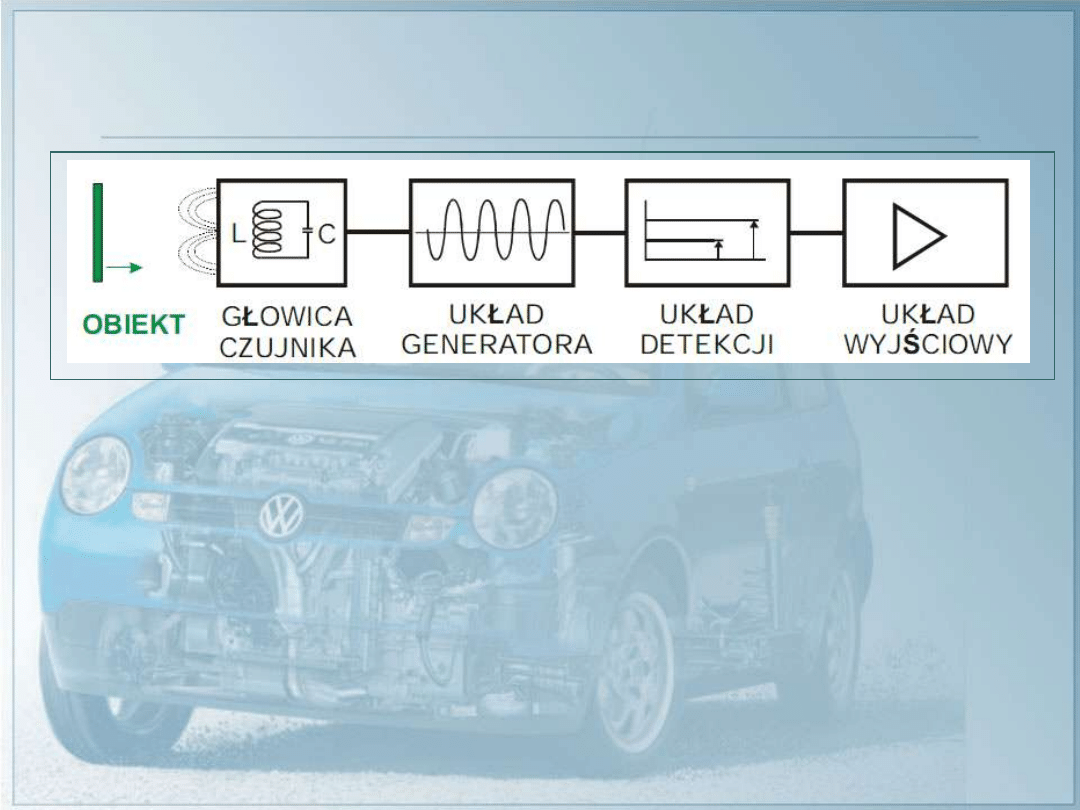
położenia, przemieszczeń
i ruchu mechanizmów związanych ze sterowanymi urządzeniami.
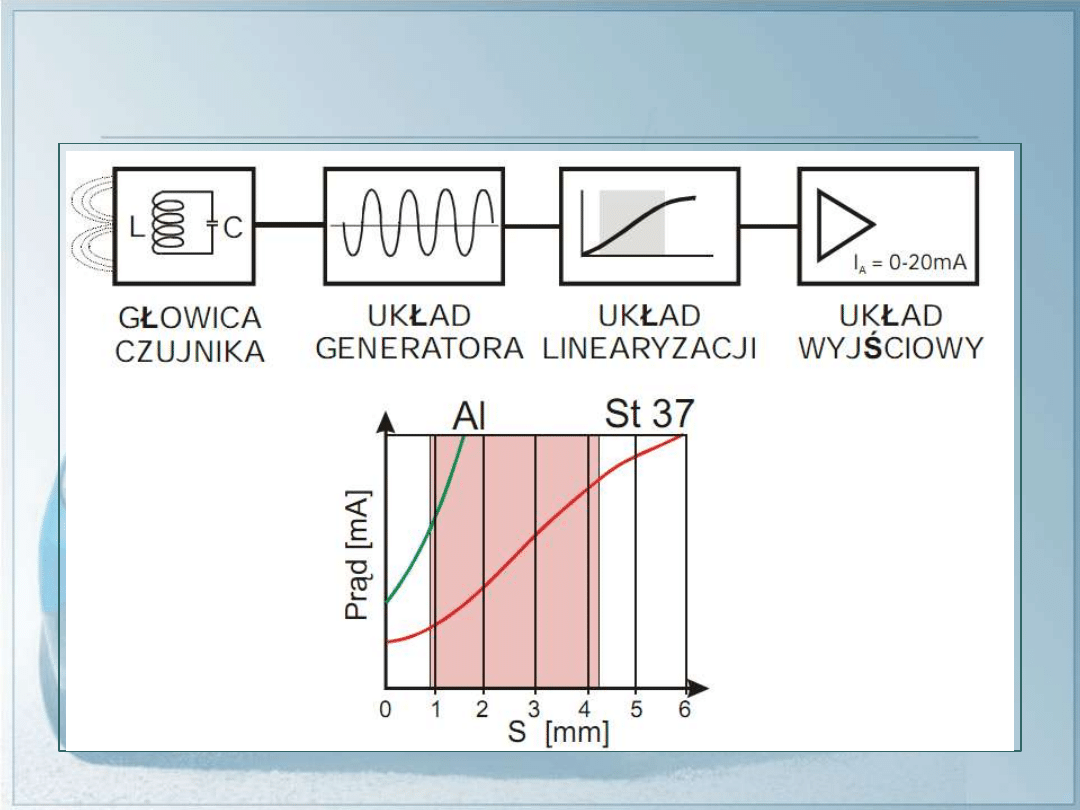
Czujniki te reagują, na przedmioty metalowe. Podstawowymi
składnikami
czujnika
indukcyjnego
są
(rys.):
głowica
zawierająca cewkę indukcyjną z rdzeniem ferrytowym, generator
napięcia
sinusoidalnego,
układ
detekcji
(komparator)
i
wzmacniacz wyjściowy.
Czujniki indukcyjne
2012-12-01 22:00
10
Podstawy mechatroniki Wykład 4 Sensoryka
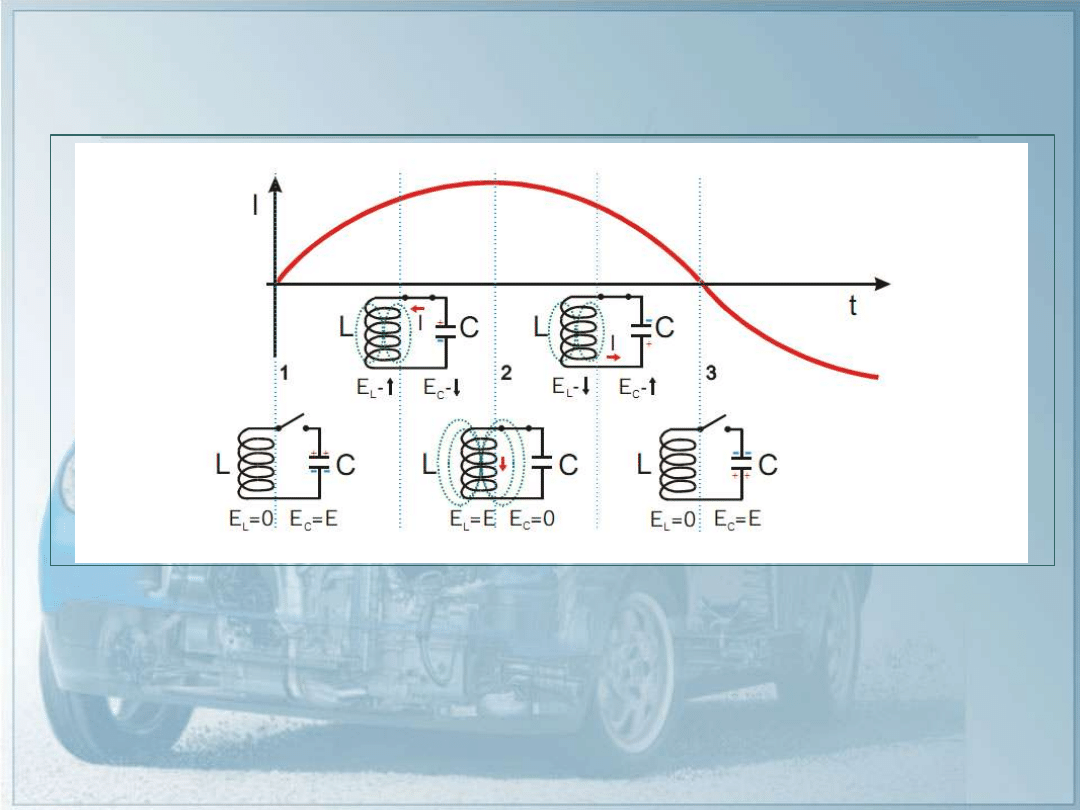
W elektrycznych układach rezonansowych całkowita energia jest
zgromadzona w postaci energii pola magnetycznego E
L
cewki
indukcyjnej
i
energii
pola
elektrycznego
naładowanego
kondensatora E
c
. W każdej chwili suma tych energii jest taka
sama tzn. E = E
L
+ E
c
= const. (rys.).
Czujniki indukcyjne
2012-12-01 22:00
11
Podstawy mechatroniki Wykład 4 Sensoryka
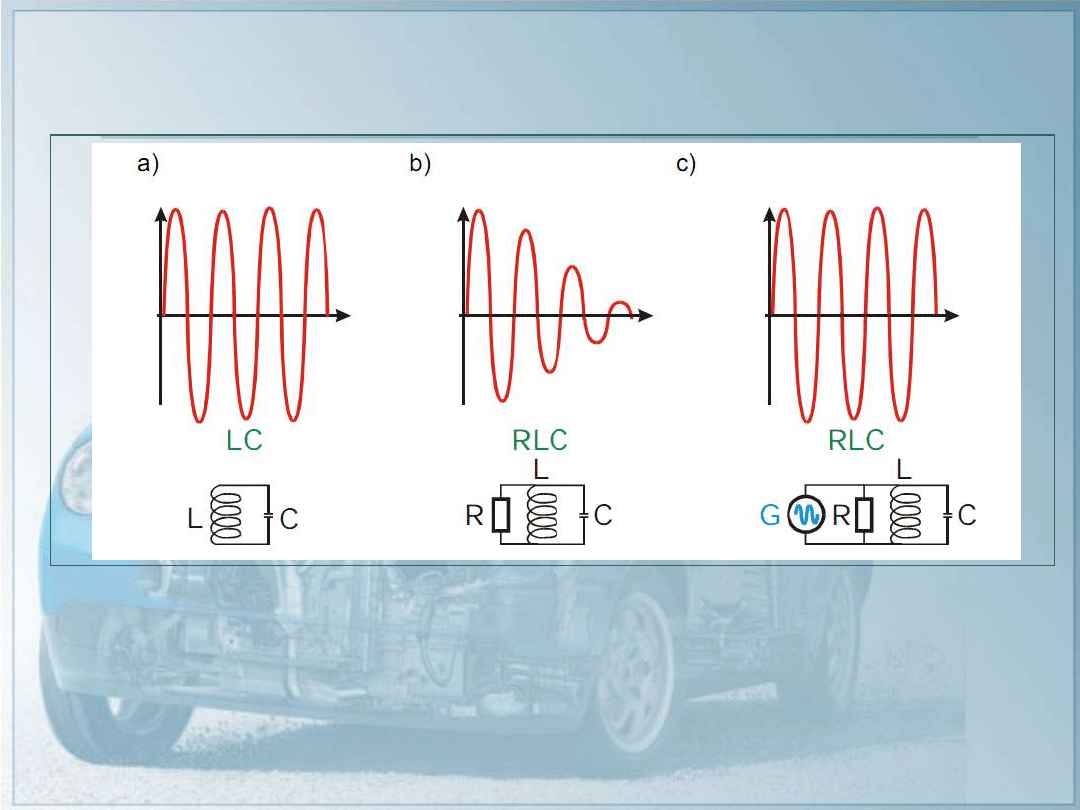
W rzeczywistych obwodach LC występują zawsze dodatkowe
straty
energii,
związane z własną rezystancją cewki i
kondensatora. Z tego powodu oscylacje obwodu z rezystancją
RLC będą tłumione (rys.). Oscylacje obwodu można podtrzymać,
zasilając go z zewnętrznego źródła napięciem sinusoidalnym.
Czujniki indukcyjne
2012-12-01 22:00
12
Podstawy mechatroniki Wykład 4 Sensoryka
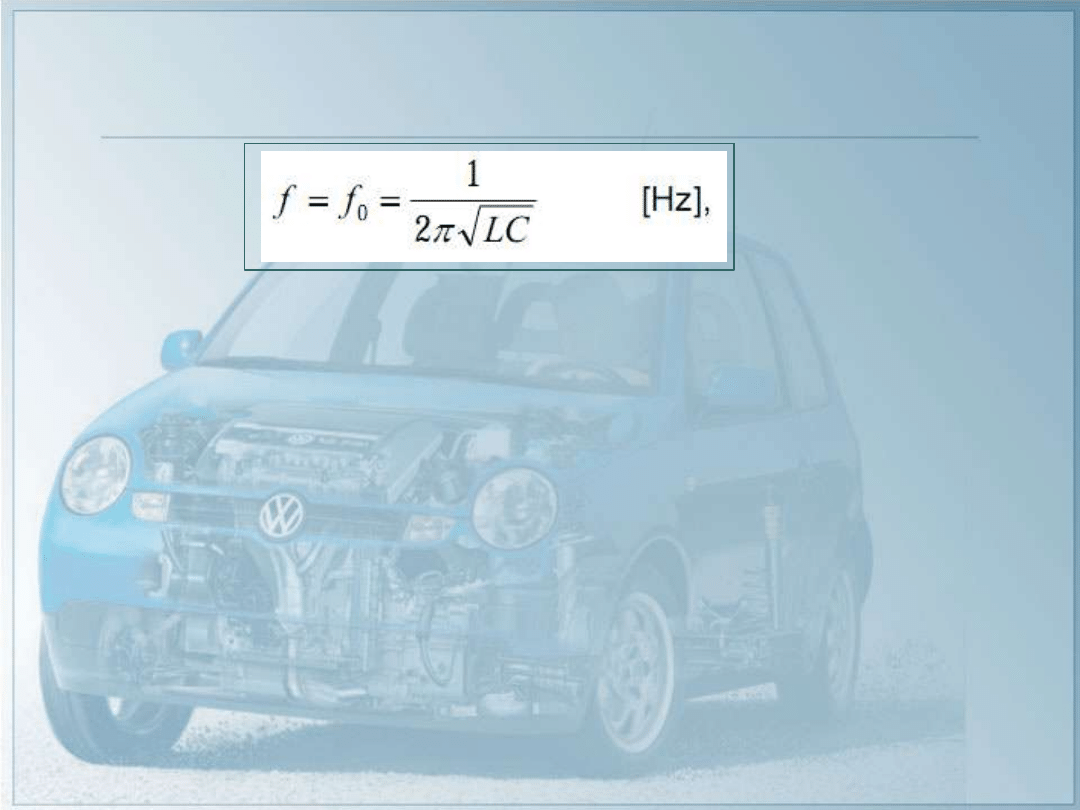
gdzie:
f – częstotliwość zewnętrznego źródła sinusoidalnego,
f
0
- częstotliwość własna nietłumionego obwodu LC,
L – indukcyjność [Henr],
C – pojemność [Farad].
Jest to warunkiem wystąpienia rezonansu napięć lub prądów
w obwodzie. Maksimum amplitudy oscylacji w obwodzie jest
tym wyższe im większa jest wartość współczynnika dobroci
obwodu.
Czujniki indukcyjne
2012-12-01 22:00
13
Podstawy mechatroniki Wykład 4 Sensoryka
Współczynnik dobroci Q jest miarą strat powstających w
elementach L i C, reprezentowanych przez rezystancję
równoległą R. Bezstratny obwód miałby w warunkach
rezonansu, nieskończenie dużą rezystancję równoległą R. Im
większe są straty w obwodzie tym rezystancja równoległa jest
mniejsza, a tym samym współczynnik dobroci też jest
mniejszy.
Czujniki indukcyjne
2012-12-01 22:00
14
Podstawy mechatroniki Wykład 4 Sensoryka
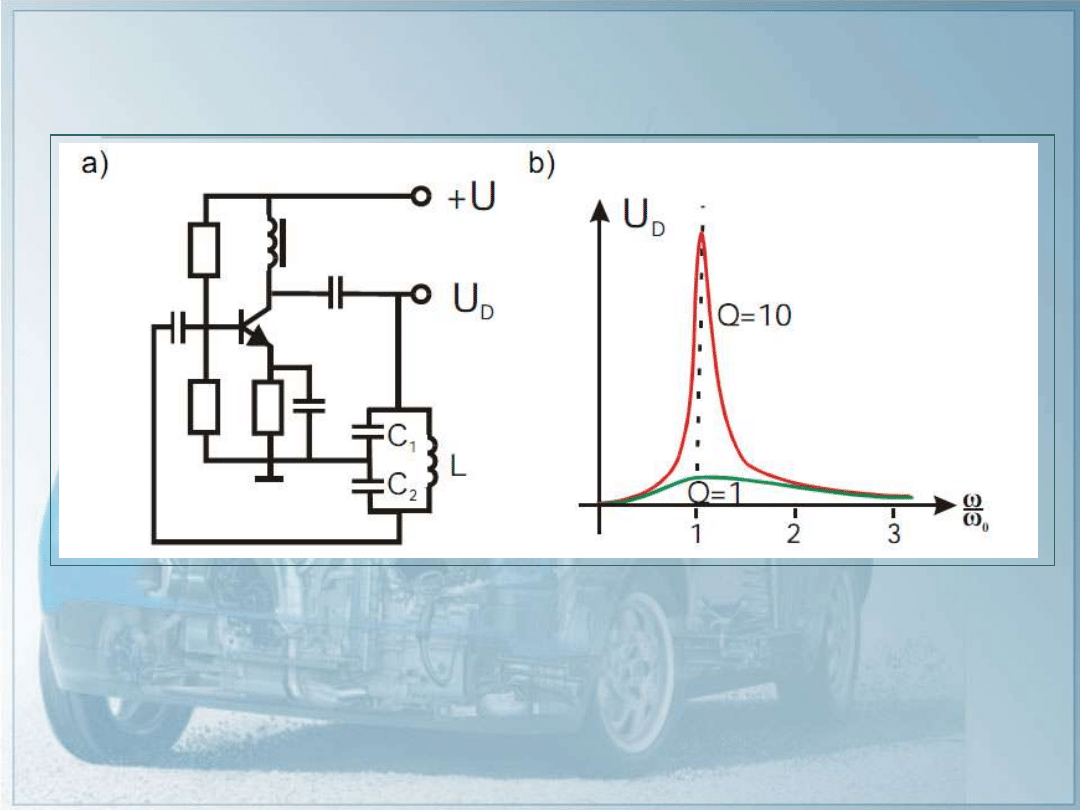
Rys. a. Przykład układu generatora LC.
Poziom sygnału wyjściowego zależy od współczynnika dobroci Q
układu rezonansowego. Mała dobroć istotnie zmniejsza sygnał
wyjściowy z układu elektronicznego (rys. b).
Czujniki indukcyjne
2012-12-01 22:00
15
Podstawy mechatroniki Wykład 4 Sensoryka
Czujniki indukcyjne
2012-12-01 22:00
16
Podstawy mechatroniki Wykład 4 Sensoryka
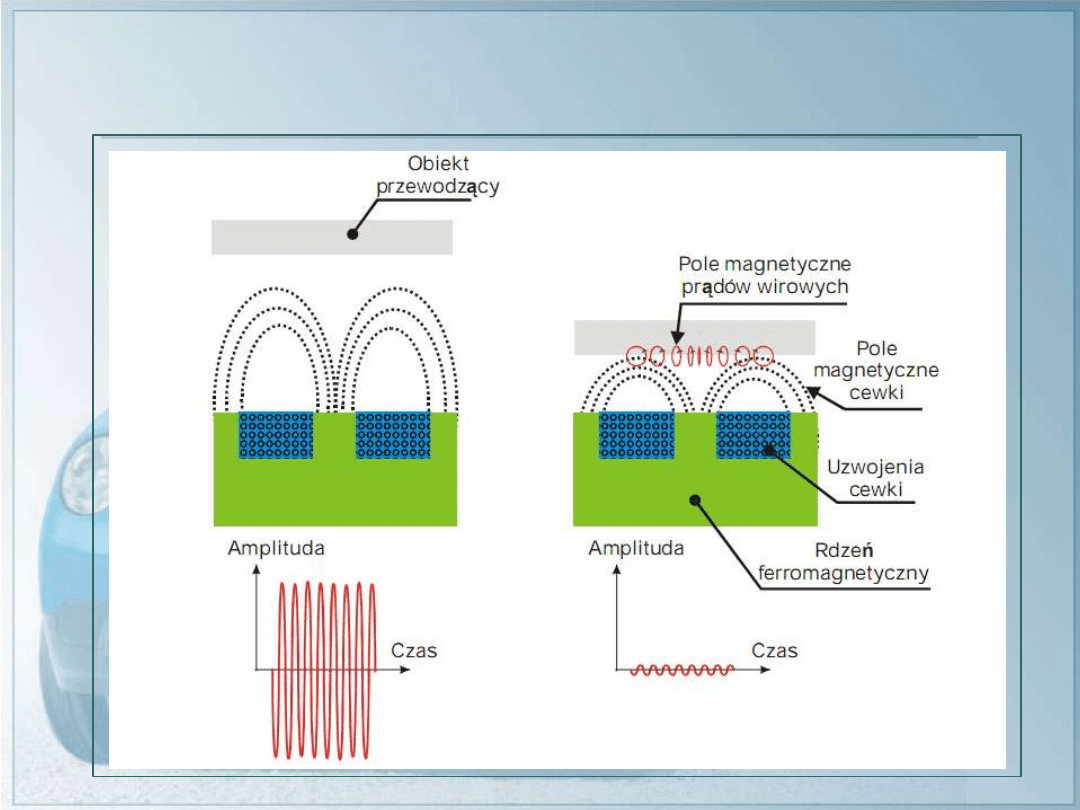
Obiekt
metalowy
w
polu
magne-
tycznym cewki z rdzeniem ferrytowym
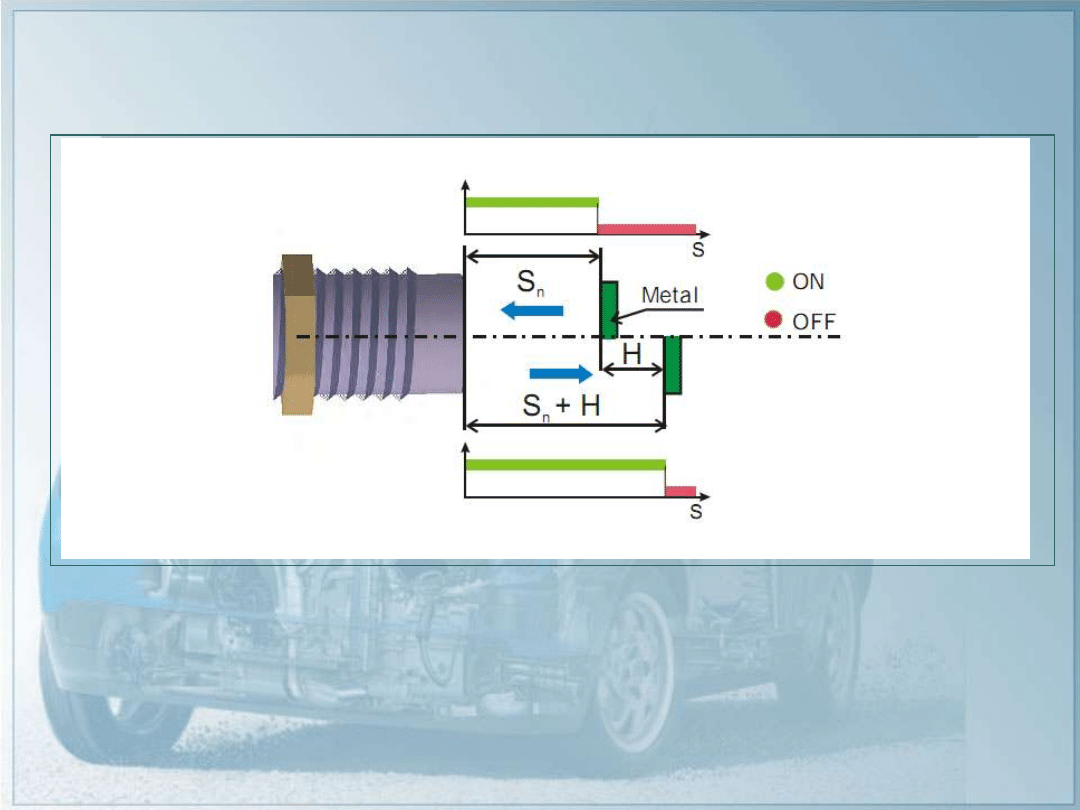
Rys. Histereza czujnika indukcyjnego .
Wartość histerezy zależy od rodzaju i wielkości czujnika i nie
przekracza 20% zakresu pomiarowego. Występowanie histerezy
zapewnia prawidłową pracę czujnika, gdy wykrywany przedmiot
znajduje się na granicy strefy działania czujnika.
Czujniki indukcyjne
2012-12-01 22:00
17
Podstawy mechatroniki Wykład 4 Sensoryka
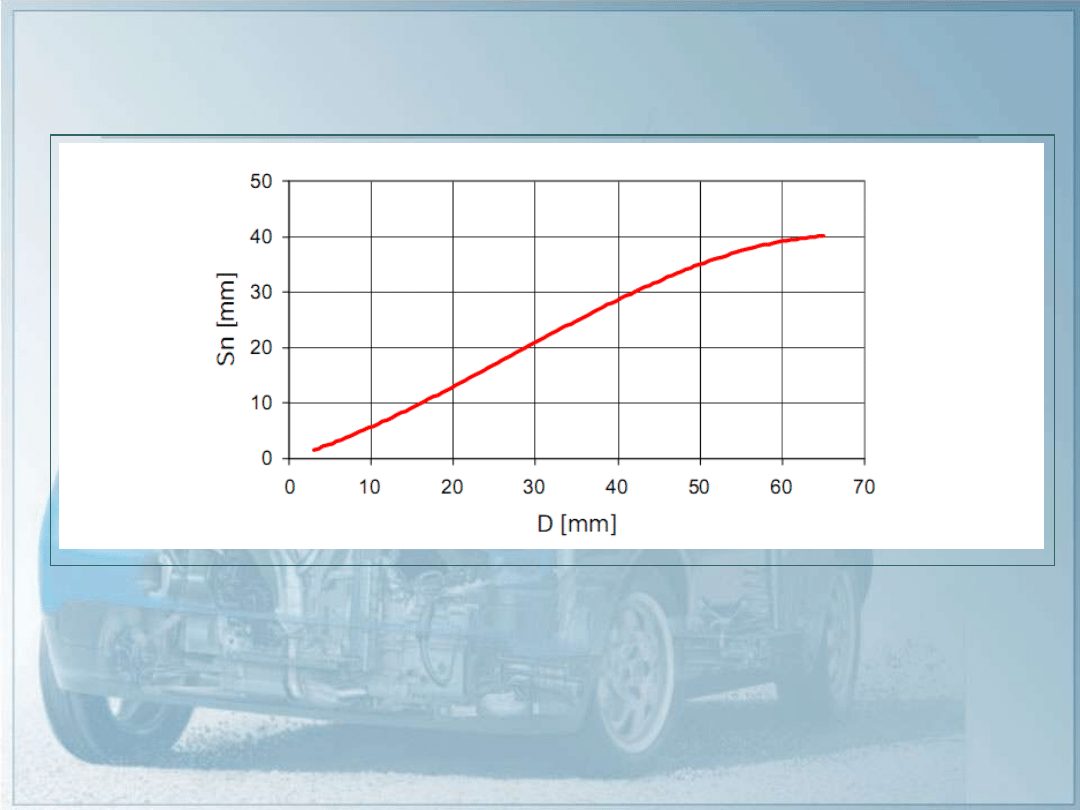
Rys. Związek pomiędzy średnicą czujnika a nominalną strefą
działania standardowych czujników indukcyjnych. Dla zwiększe-
nia pewności działania czujnika zalecaną strefą jest Strefa robo-
cza Sa ≤ 0.8Sn. Rzeczywista strefa działania Sr ustalana w pro-
cesie wytwarzania czujnika może odbiegać o 10% od wartości Sn.
Czujniki indukcyjne
2012-12-01 22:00
18
Podstawy mechatroniki Wykład 4 Sensoryka
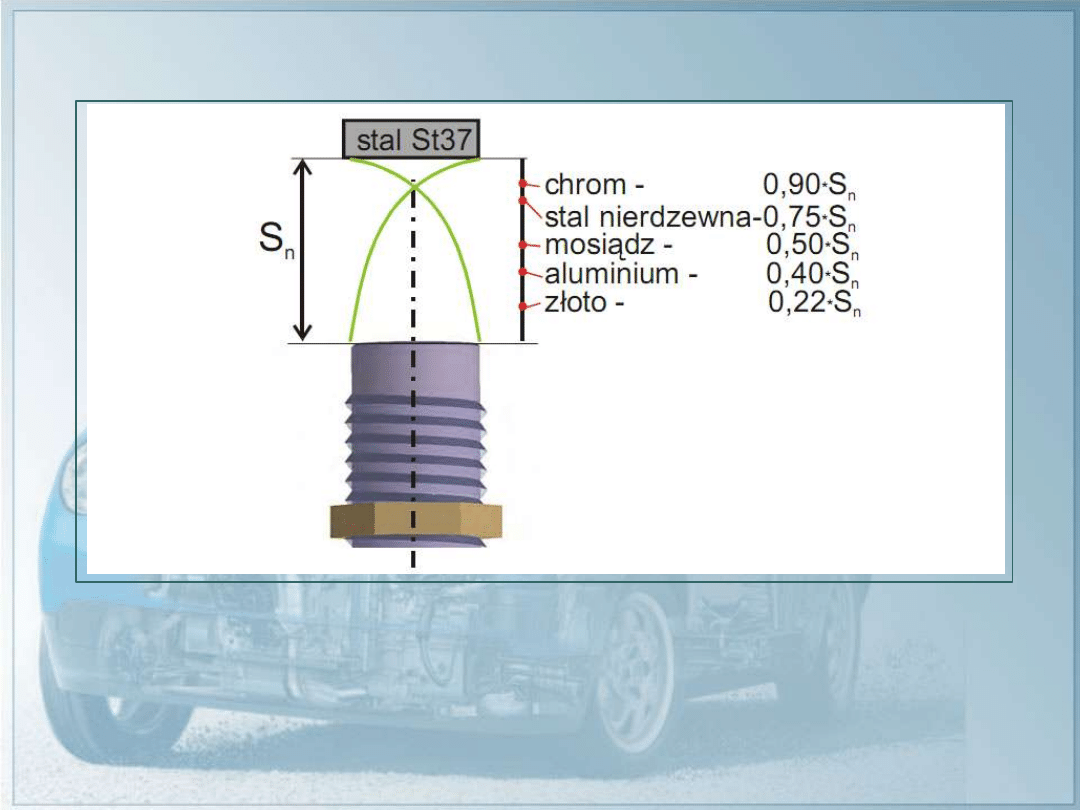
Rys. Skorygowane zakresy działania czujnika indukcyjnego dla
różnych
materiałów
przedmiotu
wykrywanego.
Czujniki
z
wysuniętą cewką charakteryzują się większą czułością
i jednocześnie większą wrażliwością na obecność innych obiektów
metalowych w ich otoczeniu.
Czujniki indukcyjne
2012-12-01 22:00
19
Podstawy mechatroniki Wykład 4 Sensoryka
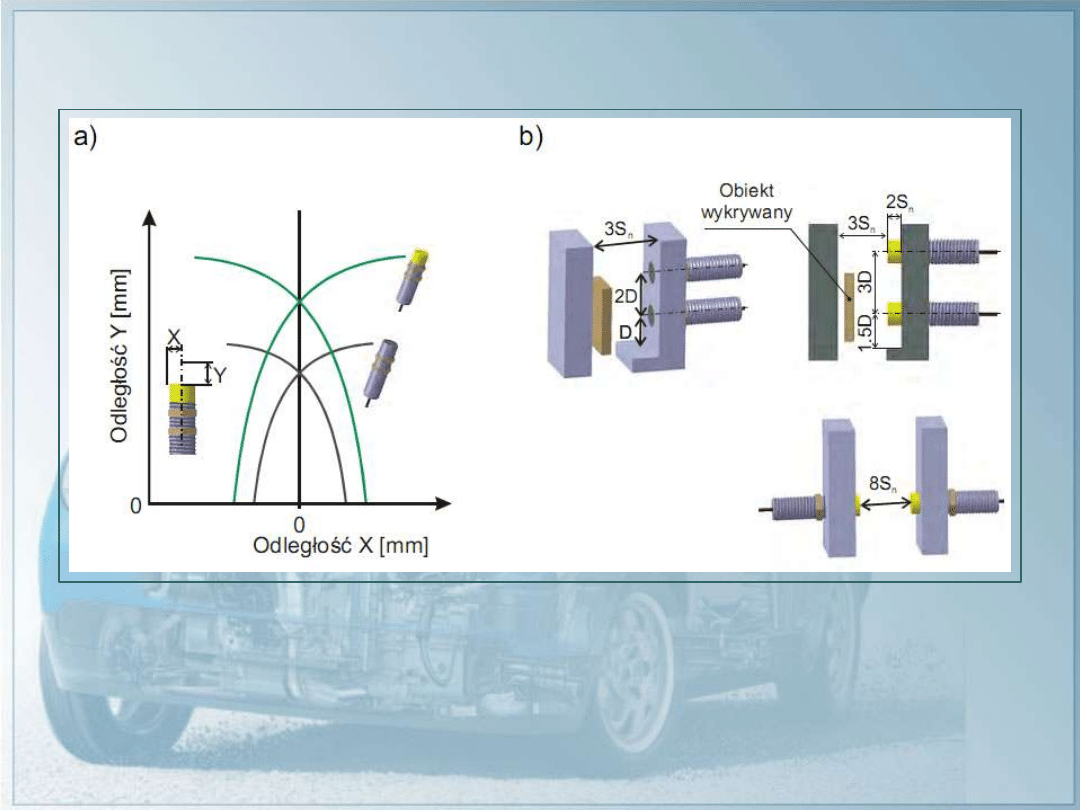
Rys. Czujniki indukcyjne z osłoniętą i nieosłoniętą cewką: a)
charakterystyki, b) zalecenia montażowe. Czujniki o konstrukcji
osłoniętej charakteryzują się większą strefą działania niż czujniki
nieosłonięte, więc wolna strefa wokół nich musi być też większa.
Czujniki indukcyjne
2012-12-01 22:00
20
Podstawy mechatroniki Wykład 4 Sensoryka
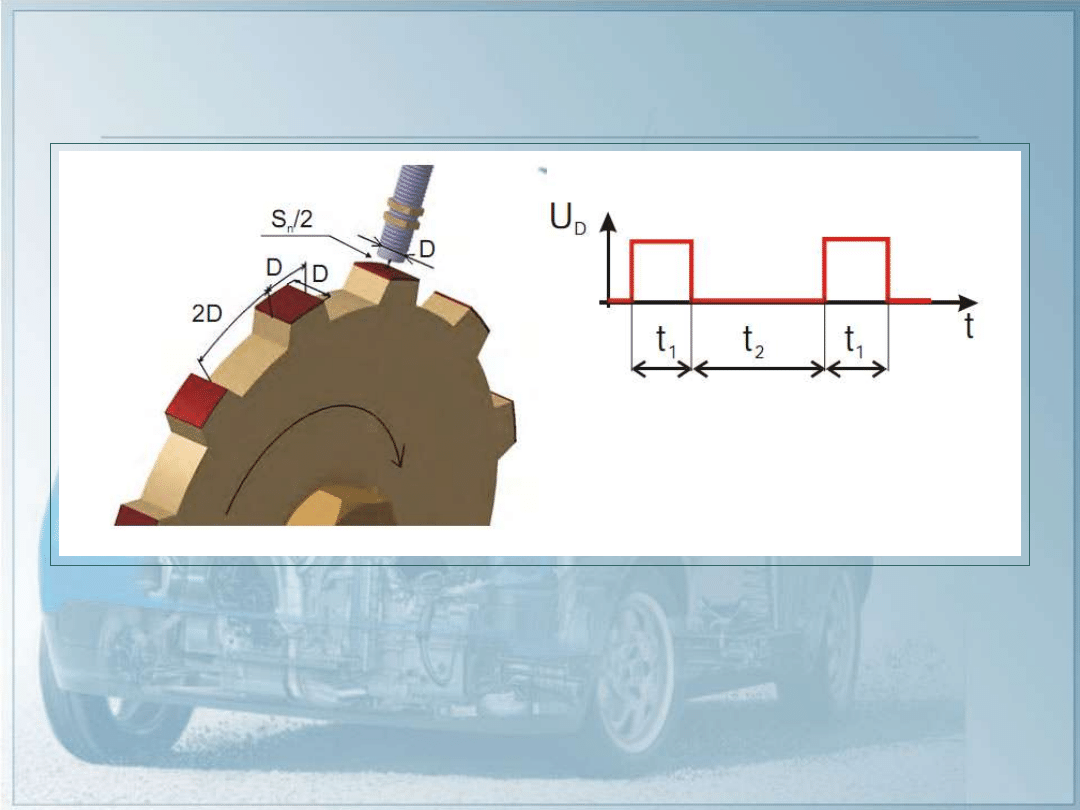
Rys. Wymagania narzucone przez normę EN 50010 przy
wyznaczaniu maksymalnej częstotliwości przełączeń wyjścia
czujnika indukcyjnego. Maksymalna częstotliwość przełączania
wyjścia f obliczana jest z zależności: f = 1 /(t1 + t2)
Czujniki indukcyjne
2012-12-01 22:00
21
Podstawy mechatroniki Wykład 4 Sensoryka
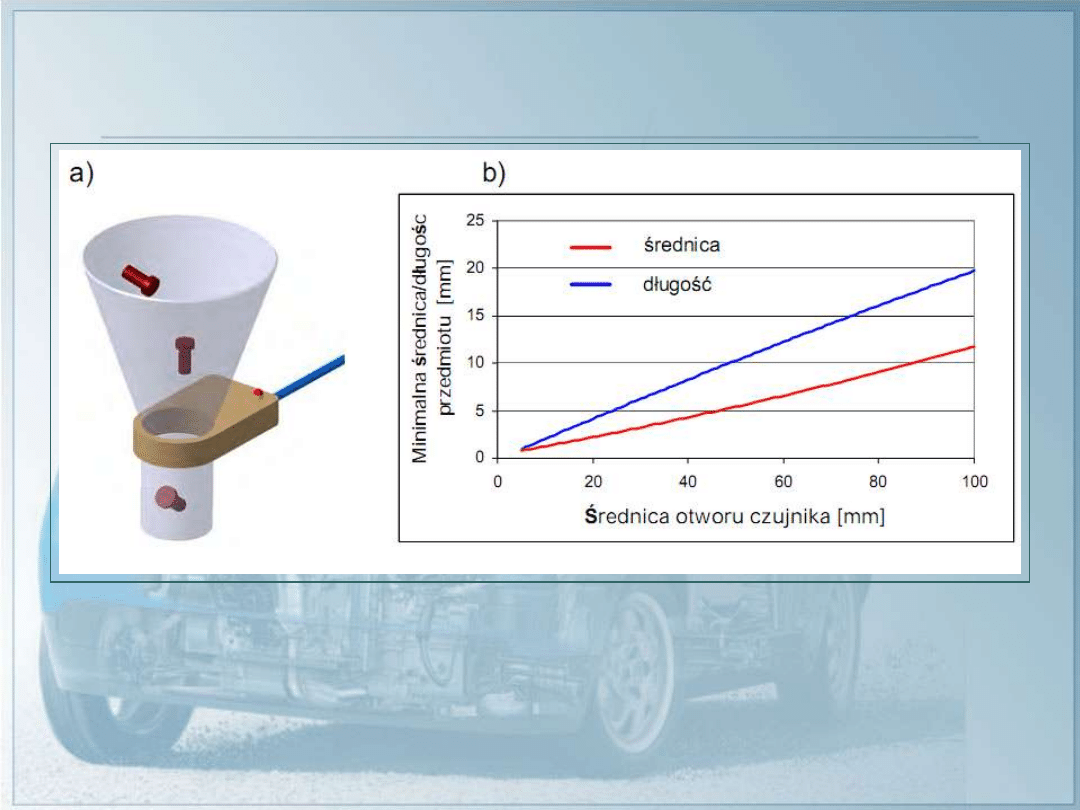
Rys. Czujnik indukcyjny pierścieniowy: a) widok, b) związek
między wielkością czujnika a minimalną wielkością wykry-
wanego przedmiotu
Czujniki indukcyjne - specjalne
2012-12-01 22:00
22
Podstawy mechatroniki Wykład 4 Sensoryka
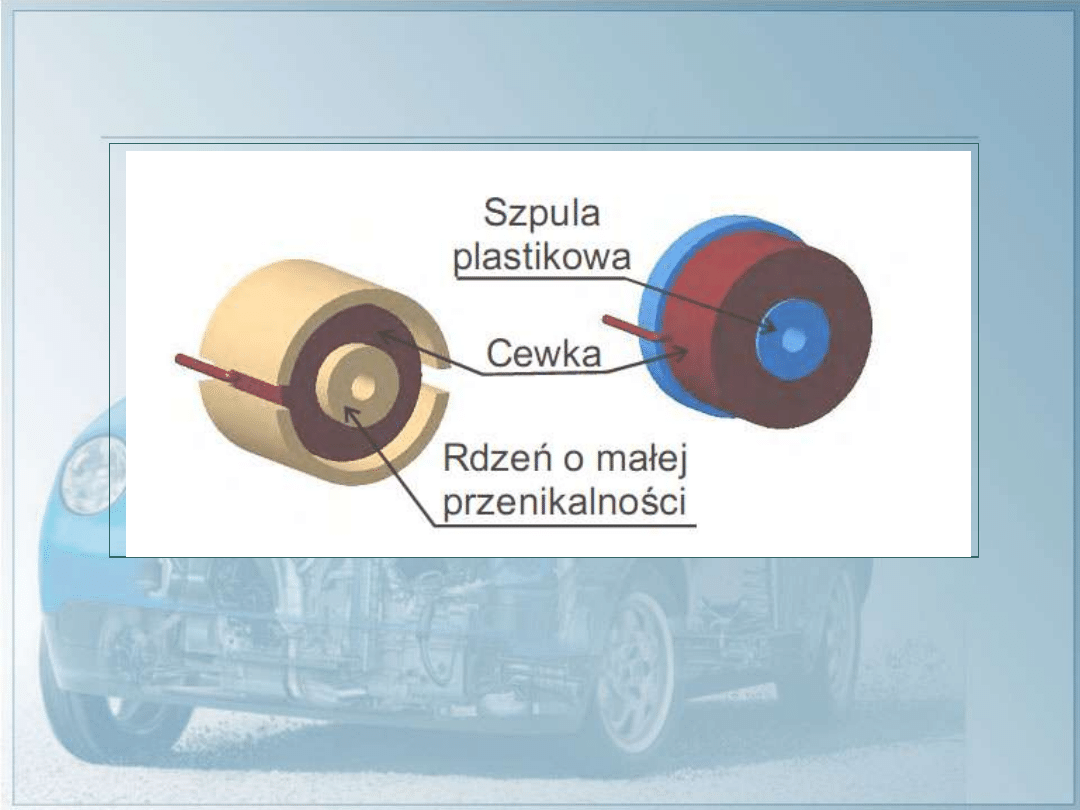
Rys. Cewki czujników indukcyjnych odpornych na silne pola
magnetyczne. Najwyższą odporność na działanie zewnętrznych
pól magnetycznych mają czujniki całkowicie pozbawione
rdzenia, który w tradycyjnych czujnikach koncentrował wokół
siebie zewnętrzny magnetyzm.
Czujniki indukcyjne - specjalne
2012-12-01 22:00
23
Podstawy mechatroniki Wykład 4 Sensoryka
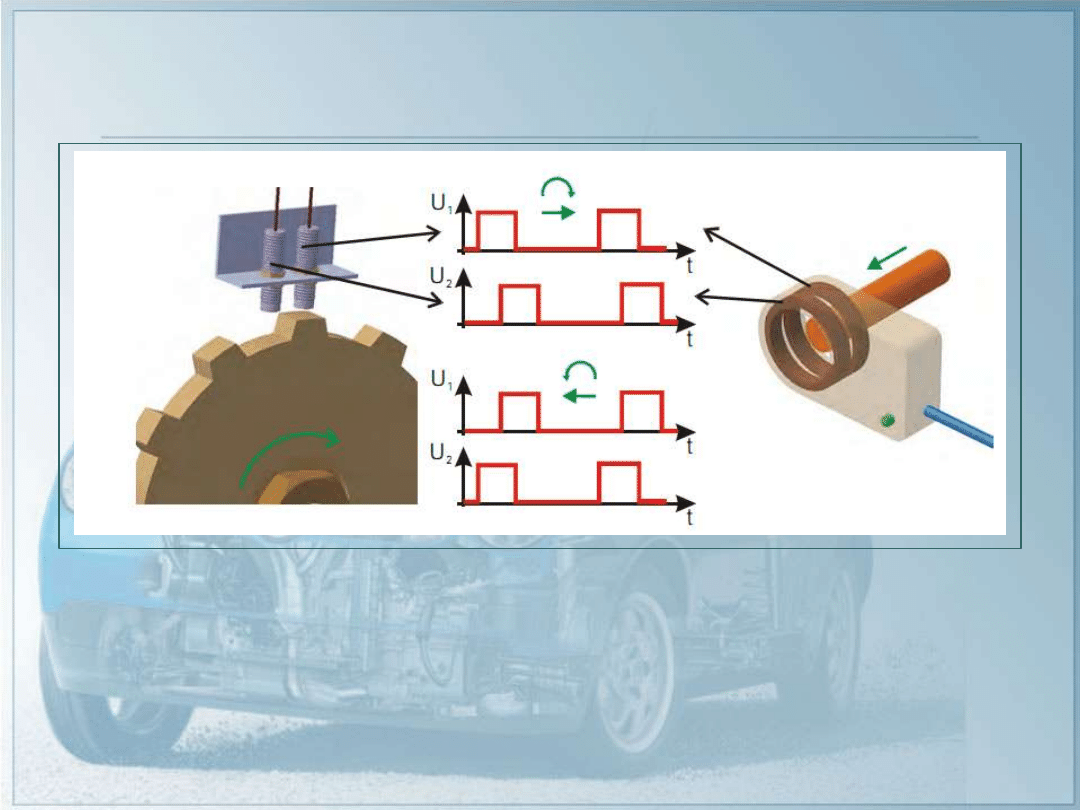
Rys.
Rozpoznawanie
kierunku
ruchu
dwoma
czujnikami
standardowymi i czujnikiem bistabilnym.
Czujniki indukcyjne - specjalne
2012-12-01 22:00
24
Podstawy mechatroniki Wykład 4 Sensoryka
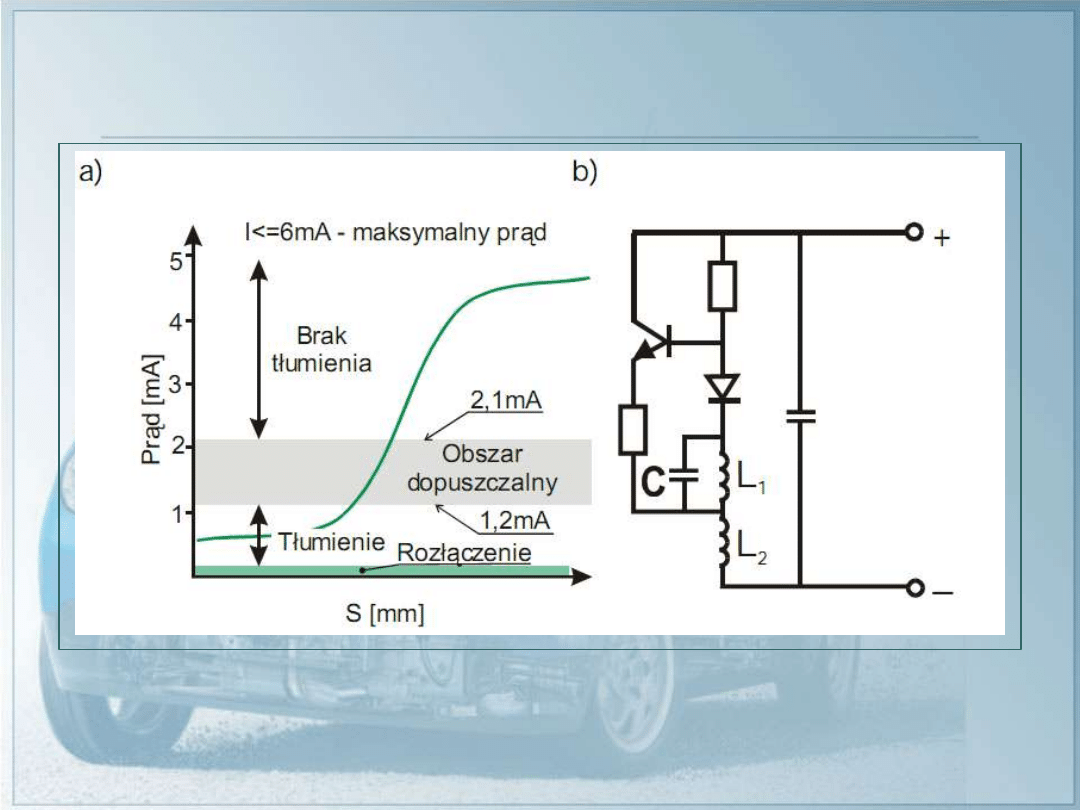
Rys. Czujnik typu NAMUR a) charakterystyka, b) obwód
elektryczny
,
są
2-przewodowymi
czujnikami,
których
wewnętrzna rezystancja zmienia się w wyniku wykrycia metalu.
Czujniki indukcyjne - specjalne
2012-12-01 22:00
25
Podstawy mechatroniki Wykład 4 Sensoryka
Czujniki indukcyjne - specjalne
2012-12-01 22:00
26
Podstawy mechatroniki Wykład 4 Sensoryka
Rys. Analogowy czujnik z wyjściem indukcyjnym
Czujniki indukcyjne - specjalne
2012-12-01 22:00
27
Podstawy mechatroniki Wykład 4 Sensoryka
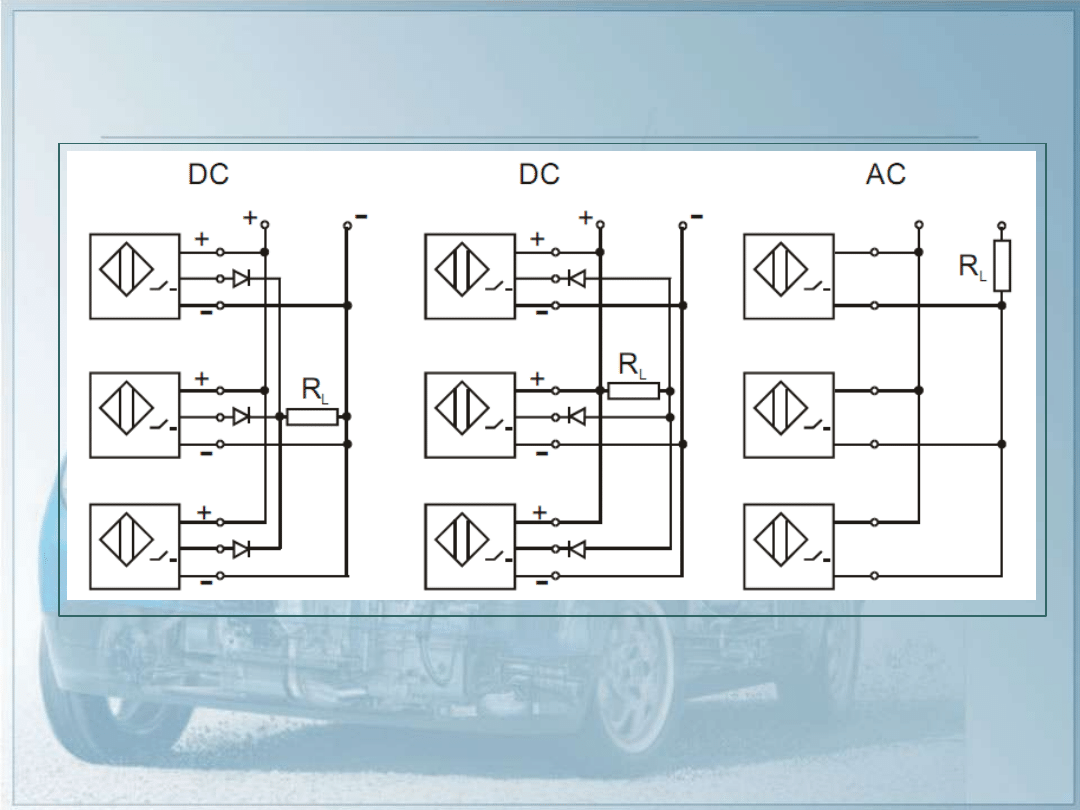
Rys. Łączenie szeregowe czujników w grupy (funkcja logiczna
AND)
Czujniki indukcyjne - specjalne
2012-12-01 22:00
28
Podstawy mechatroniki Wykład 4 Sensoryka
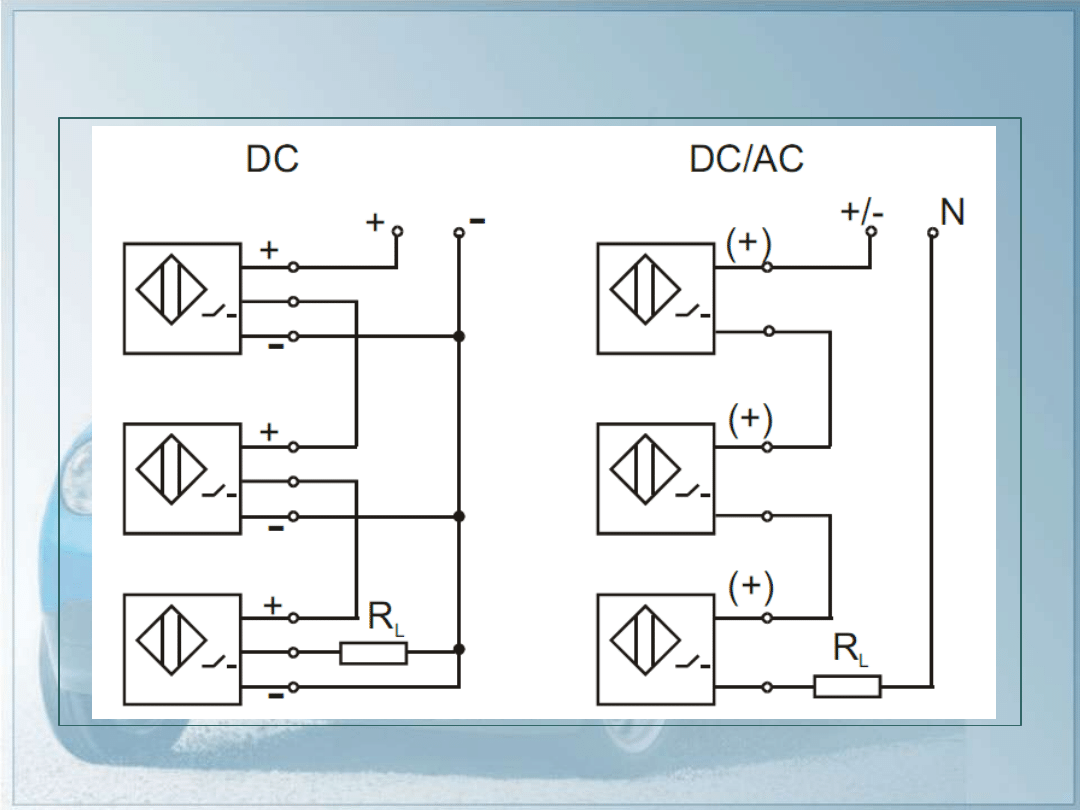
Rys. Łączenie równoległe czujników w grupy (funkcja logiczna
OR)
Podłączanie czujników do sieci
komunikacyjnych
2012-12-01 22:00
29
Podstawy mechatroniki Wykład 4 Sensoryka
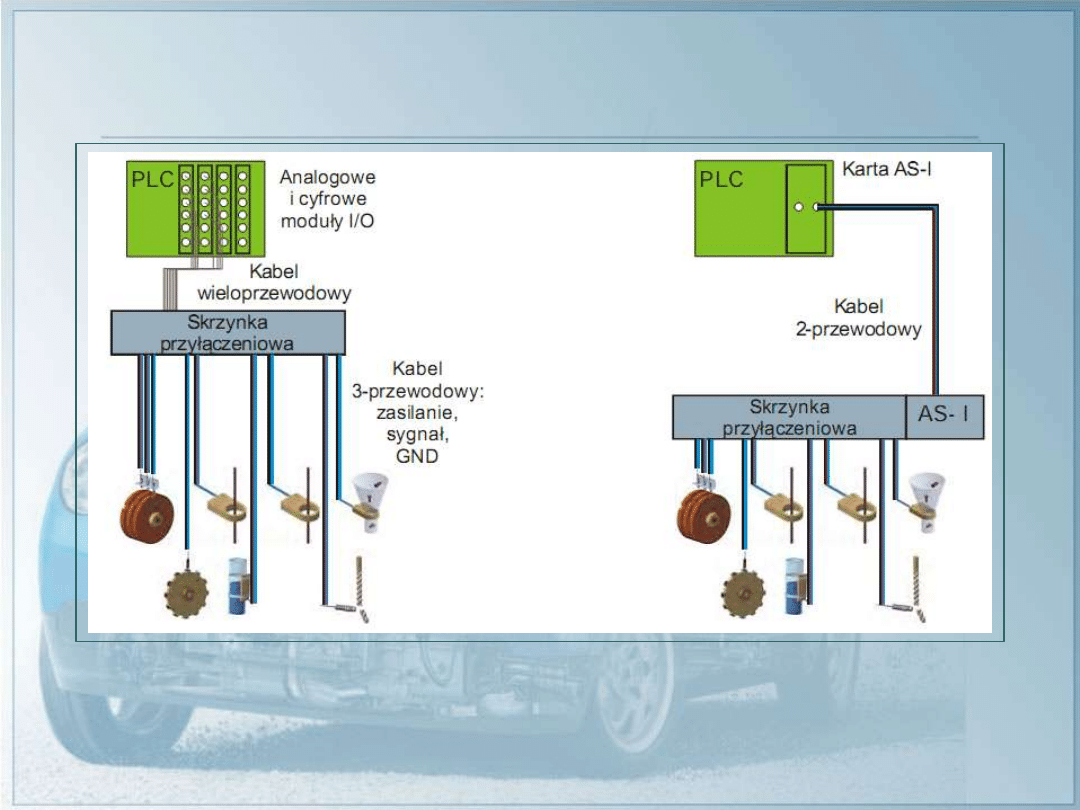
Rys. Uproszczona struktura systemu komunikacji bez sieci i z
siecią
Aplikacje
2012-12-01 22:00
30
Podstawy mechatroniki Wykład 4 Sensoryka
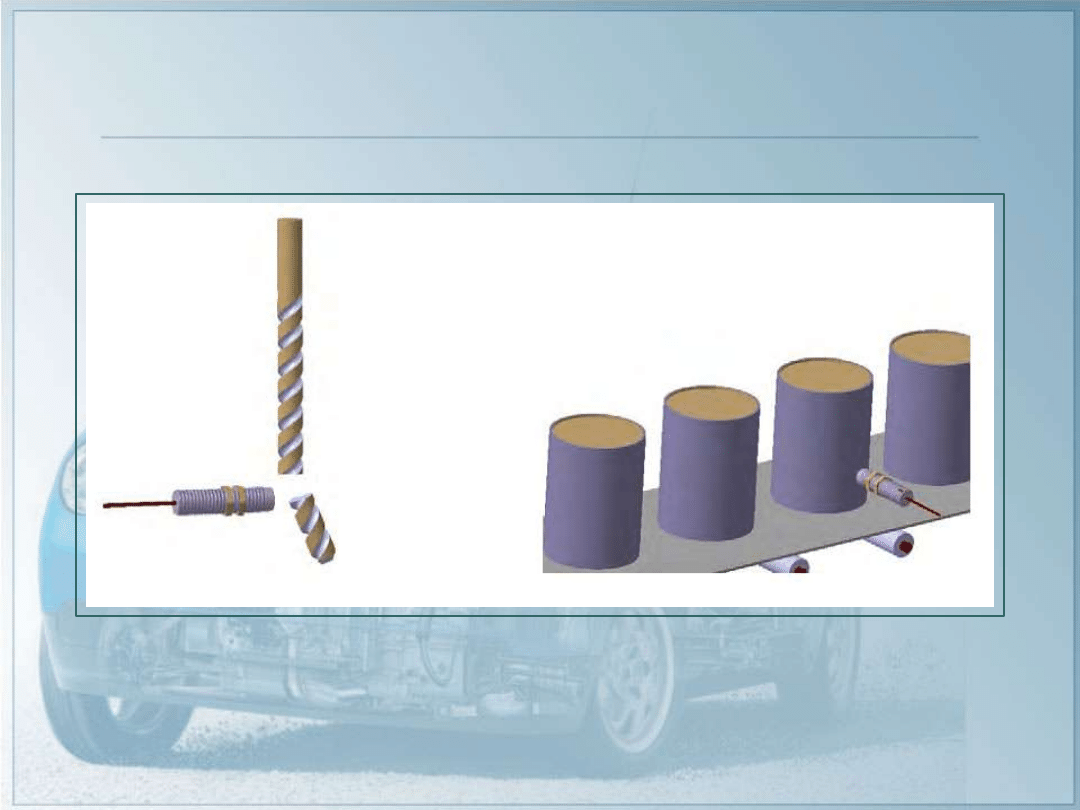
Rys. Wykrywanie złamania wiertła i obiektów na taśmie
Aplikacje
2012-12-01 22:00
31
Podstawy mechatroniki Wykład 4 Sensoryka
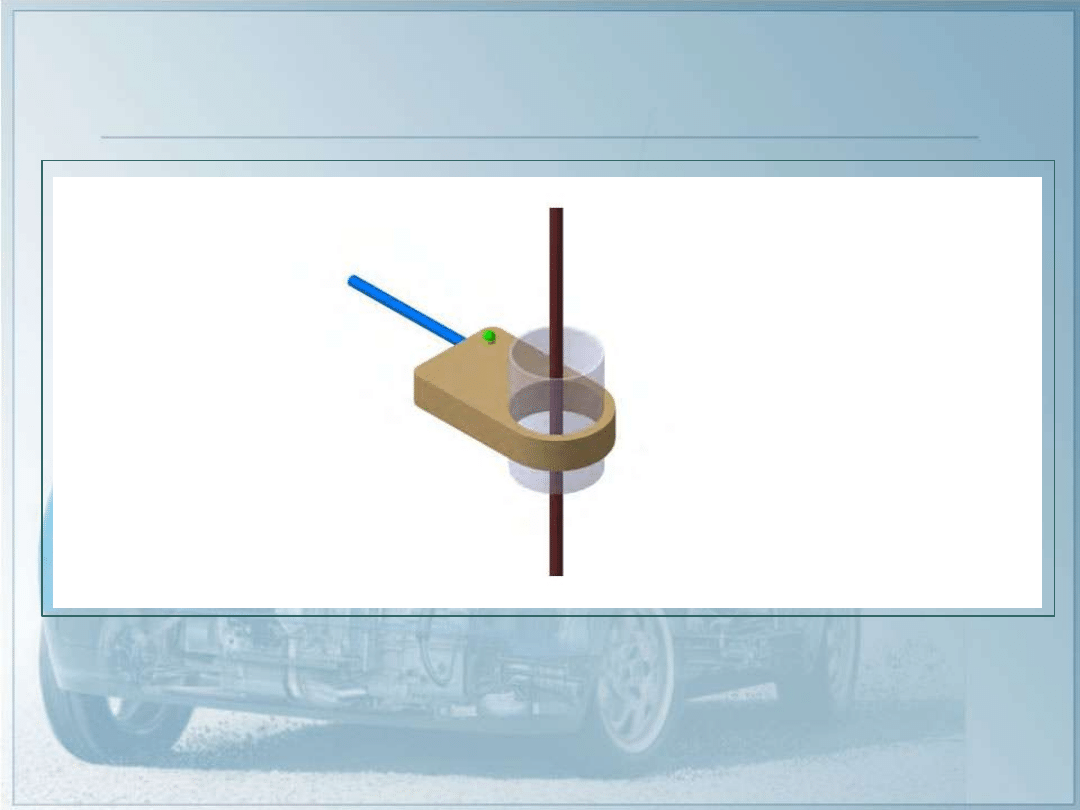
Rys. Kontrola ciągłości drutu
Wyszukiwarka
Podobne podstrony:
integracja sensoryczna5 id 2181 Nieznany
APS NCBIR (sensory) id 67332 Nieznany
Arduino workshop sensors id 682 Nieznany
Ogrod sensoryczny id 333966 Nieznany
integracja sensoryczna5 id 2181 Nieznany
f4 sensor properties rev1 id 16 Nieznany
Abolicja podatkowa id 50334 Nieznany (2)
4 LIDER MENEDZER id 37733 Nieznany (2)
katechezy MB id 233498 Nieznany
metro sciaga id 296943 Nieznany
perf id 354744 Nieznany
interbase id 92028 Nieznany
Mbaku id 289860 Nieznany
Probiotyki antybiotyki id 66316 Nieznany
miedziowanie cz 2 id 113259 Nieznany
LTC1729 id 273494 Nieznany
D11B7AOver0400 id 130434 Nieznany
analiza ryzyka bio id 61320 Nieznany
więcej podobnych podstron