1
Podstawy automatyzacji
Podstawy automatyzacji
Kurs ARM 009041W
Kurs ARM 009041W
dr in . Zbigniew Smalec, pok.3.19 B
dr in . Zbigniew Smalec, pok.3.19 B
-
-
4
4
Kierunek studiów: ZIP - stacjonarne
I-stopie , III rok, sem. 6-letni
Rok akad. 2011/12
Politechnika Wrocławska
W y d z i a ł M e c h a n i c z n y
Instytut Technologii Maszyn i Automatyzacji
Wrocław, 2012
Cz
1
Cz
1 (1 – 117)
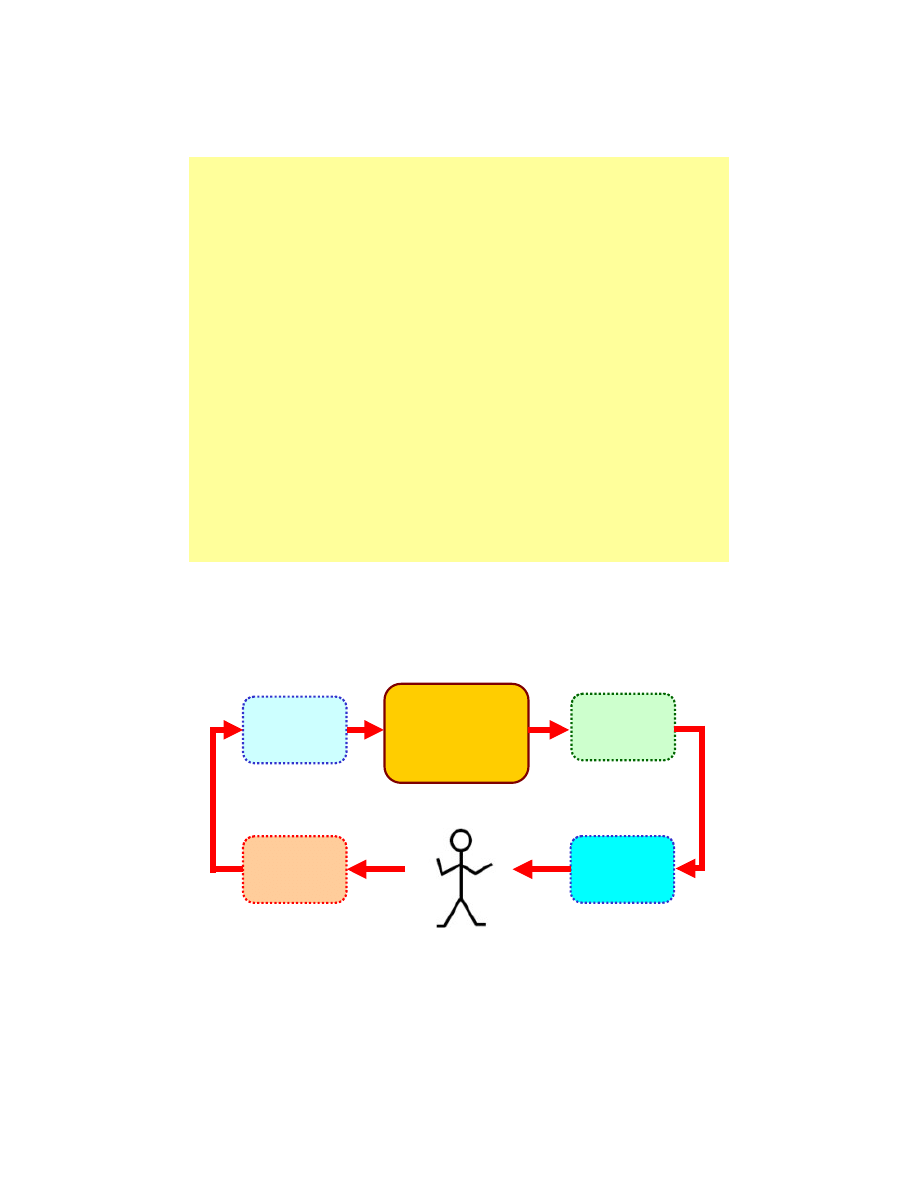
Sterowanie procesem przemysłowym
Proces
Proces
przemysłowy
przemysłowy
Czujniki
Czujniki
i przetworniki
i przetworniki
pomiarowe
pomiarowe
Urz dzenia
Urz dzenia
wykonawcze
wykonawcze
Elementy
Elementy
nastawcze
nastawcze
Wska niki
Wska niki
Człowiek - operator
2
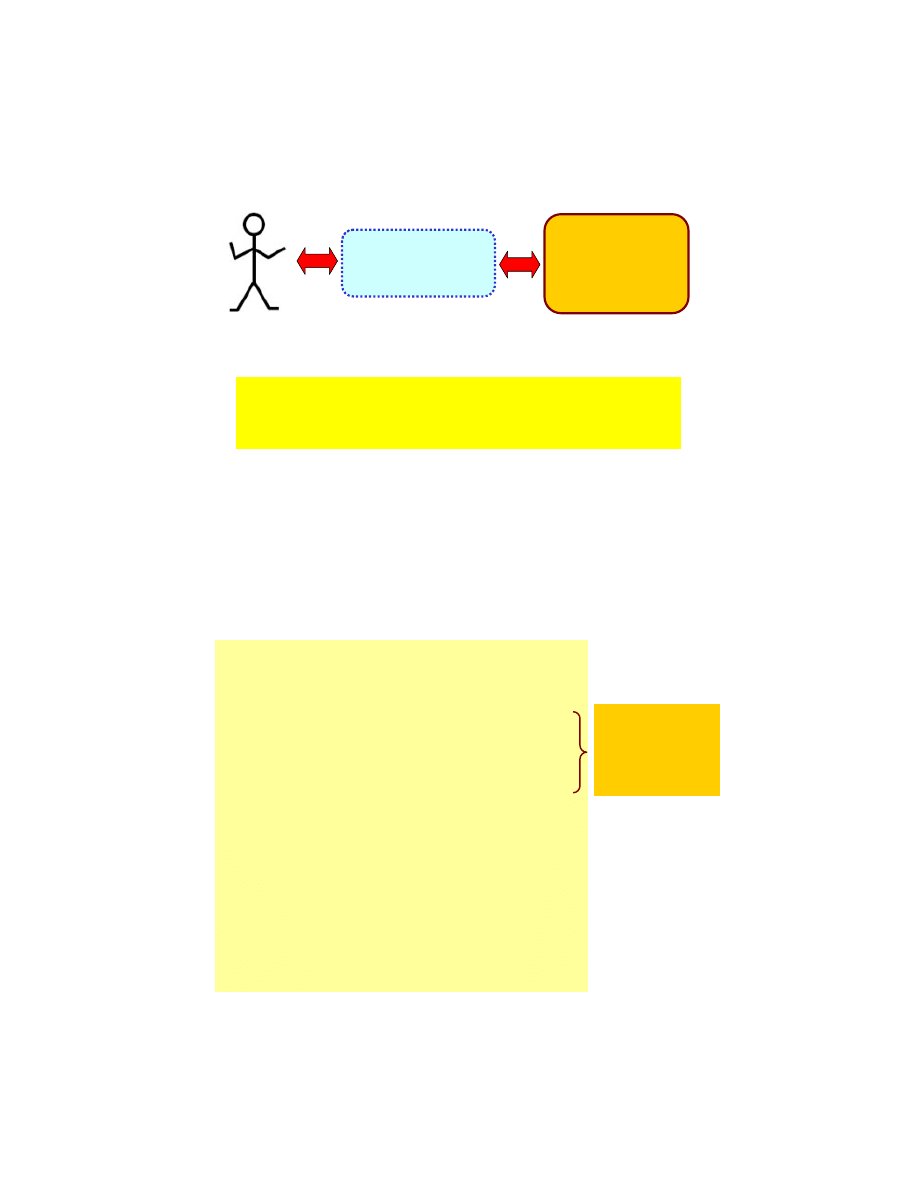
Definicja systemu automatyki
Proces
Proces
przemysłowy
przemysłowy
System
System
automatyki
automatyki
Zestaw rodków technicznych umo liwiaj cych
człowiekowi sterowanie procesem przemysłowym
i sprawowanie nadzoru nad jego przebiegiem.
A
A
B
B
Składniki systemu automatyki
System automatyki obejmuje:
urz dzenia do przetwarzania informacji:
– komputery przemysłowe,
– sterowniki programowalne,
– regulatory jedno- i wielokanałowe,
– panele i stacje operatorskie,
urz dzenia peryferyjne:
– sterowniki programowalne,
– regulatory jedno- i wielokanałowe,
– panele i stacje operatorskie,
okablowanie i magistrale komunikacyjne.
wyposa one
w układy
wej i wyj
procesowych
3
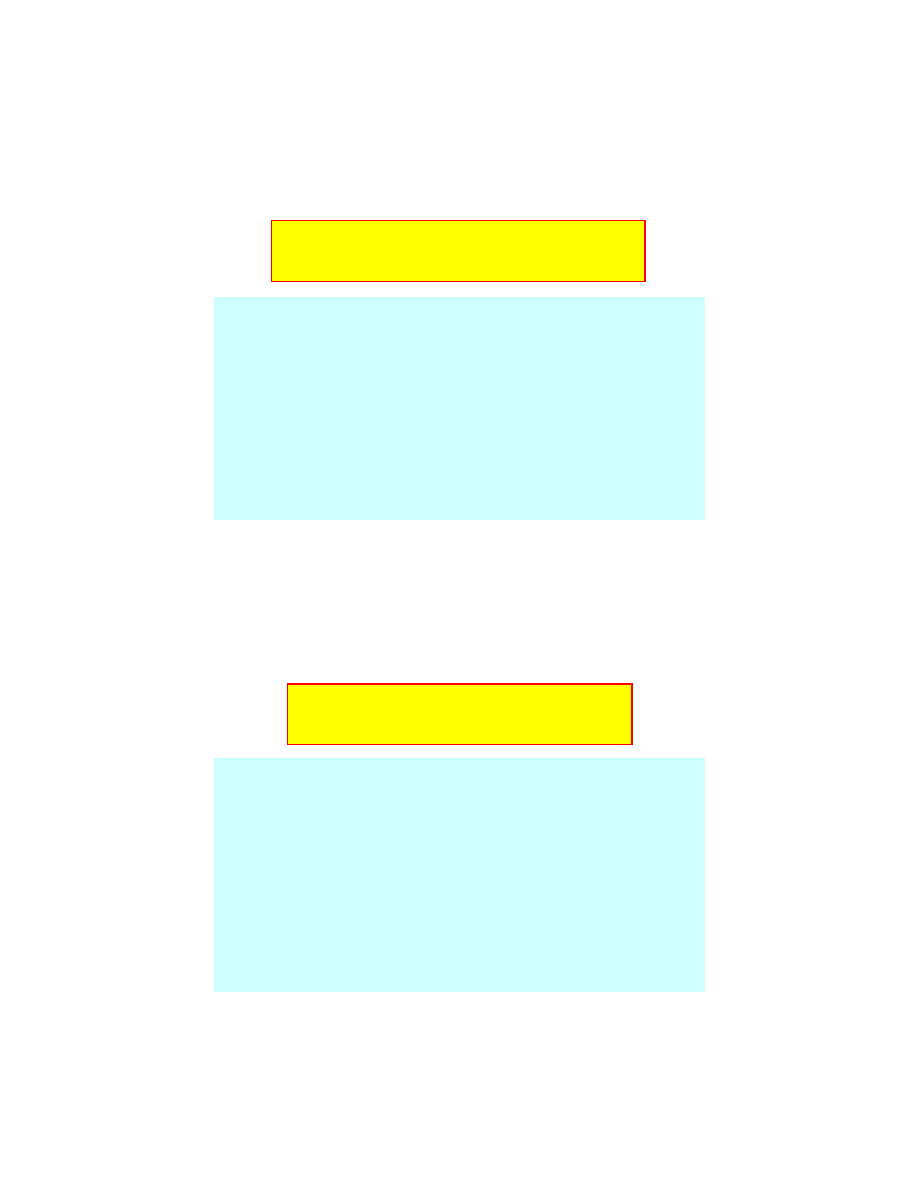
Interfejs pomi dzy człowiekiem a systemem automatyki
Interfejs pomi dzy człowiekiem a systemem automatyki
musi by dostosowany do mo liwo ci
percepcyjnych człowieka.
Obejmuje on urz dzenia obsługi HMI (ang.
Human-Machine
Interface
) instalowane w miejscach przebywania ludzi
takie jak:
• wska niki,
• elementy nastawcze,
• panele i stacje operatorskie,
• komputery z oprogramowaniem SCADA (ang. S
upervisory
Control and Data Acquisition).
Interfejs pomi dzy systemem automatyki a procesem
Interfejs pomi dzy systemem automatyki a procesem
musi by dostosowany do wymaga
wynikaj cych z charakteru procesu.
Obejmuje on urz dzenia instalowane w bezpo rednim
s siedztwie procesu:
• czujniki i przetworniki pomiarowe,
• urz dzenia wykonawcze,
• regulatory jedno- i wielokanałowe,
• sterowniki programowalne,
• komputery przemysłowe z oprogramowaniem
dostosowanym do pracy w czasie rzeczywistym.
4
Zadania systemu automatyki
Zadania systemu automatyki:
Zadania systemu automatyki:
• zbieranie informacji o zmiennych procesowych,
• obserwowanie i dokumentowanie przebiegu procesu,
• przetwarzanie matematyczne zmiennych procesowych i wypracowywanie decyzji,
• sterowanie procesem poprzez wdra anie decyzji własnych lub podj tych przez operatorów,
• realizowanie ł czno ci mi dzy lud mi (operatorami procesu) a procesem,
• autodiagnostyka,
• zbieranie informacji o zmiennych procesowych:
– pomiar sygnałów fizycznych bezpo rednio za pomoc czujników lub za po rednictwem
przetworników pomiarowych,
– przechowywanie bie cych i historycznych informacji o pomierzonych fizycznie lub
przetworzonych matematycznie sygnałach i ich parametrach w bazie danych,
• przetwarzanie matematyczne zmiennych procesowych i wypracowywanie decyzji:
– obróbka cyfrowa sygnałów (filtracja, wyznaczanie parametrów sygnałów - warto ci rednie,
odchylenia standardowe),
– dokonywanie oceny jako ci procesu,
– wyznaczanie sygnałów steruj cych w oparciu o algorytmy regulacji bezpo redniej oraz
nadrz dnej,
– analizowanie przebiegu procesu,
• obserwowanie i dokumentowanie przebiegu procesu:
– dostarczanie ci głej informacji o aktualnym stanie procesu,
– sygnalizacja stanów alarmowych,
– sporz dzanie raportów bie cych i historycznych,
• realizowanie ł czno ci mi dzy lud mi (operatorami procesu) a procesem:
– wizualizacja stanu procesu (wy wietlanie schematów synoptycznych, trendów, raportów na
wy wietlaczach paneli lub monitorach stacji operatorskich),
– sporz dzanie wydruków raportów,
– przyjmowanie polece wprowadzanych za pomoc przycisków funkcyjnych paneli
operatorskich lub klawiatur stacji operatorskich,
• sterowanie procesem poprzez wdra anie decyzji własnych lub podj tych przez operatorów:
– umo liwianie sterowania r cznego procesem w trybie bezpo redniego sterowania
urz dzeniami wykonawczymi i w trybie po rednim poprzez sterowanie zmianami warto ci
zadanych w prostych układach regulacji automatycznej,
– umo liwianie zdalnego dokonywania zmian nastaw regulatorów,
– ledzenie zadanych wielko ci wiod cych w zło onych układach automatyki kompleksowej,
– samoczynne wdra anie procedur awaryjnych,
• autodiagnostyka:
– testowanie i sygnalizowanie poprawno ci działania własnych elementów systemu,
– współpraca z procedurami sterowania przygotowanymi na wypadek stanów awaryjnych.
Zadania systemu automatyki c.d.
5
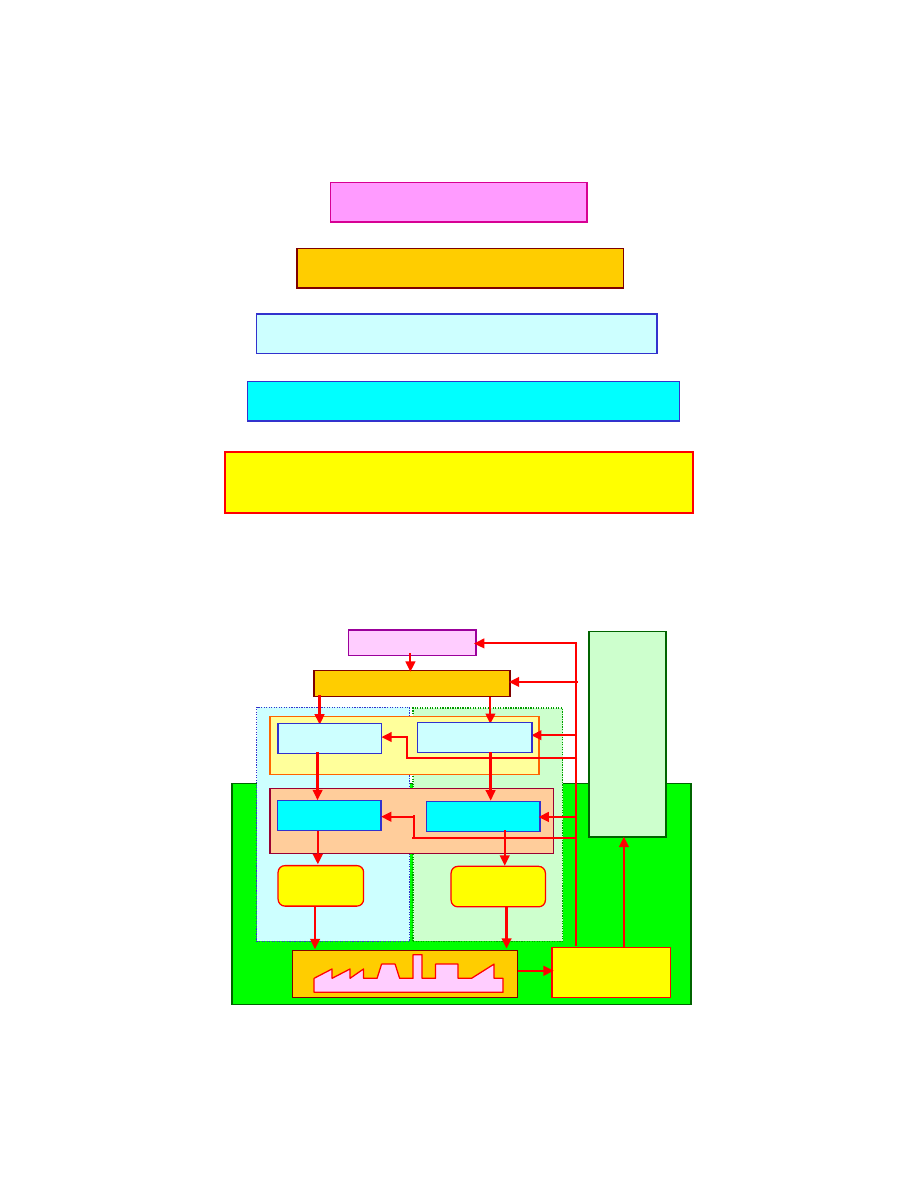
Warstwowa struktura funkcjonalna systemu automatyki
Warstwa urz dze wykonawczych oraz czujników
i przetworników pomiarowych
Warstwa zarz dzania
Warstwa zarz dzania operatywnego
Warstwa sterowania i regulacji nadrz dnej
Warstwa sterowania i regulacji bezpo redniej
(1)
(2)
(3)
(4)
(5)
Struktura funkcjonalna systemu automatyki
Poziom
obiektowy
System pomiaru
i przetwarzania
zmiennych
procesowych
System
wizualizacji,
nadzoru
i dokumentacji
przebiegu
procesu
Warstwa zarz dzania
Warstwa zarz dzania operatywnego
Proces przemysłowy
System sterowania
zmiennych
procesowych ci głych
System sterowania
zmiennych
procesowych binarnych
Warstwa regulacji
nadrz dnej
Warstwa sterowania
grup urz dze
Warstwa sterowania nadrz dnego
Urz dzenia
wykonawcze
ci głe
Urz dzenia
wykonawcze
dwupoło eniowe
Warstwa sterowania
logicznego nap dów
Warstwa sterowania bezpo redniego
Warstwa regulacji
bezpo redniej
6
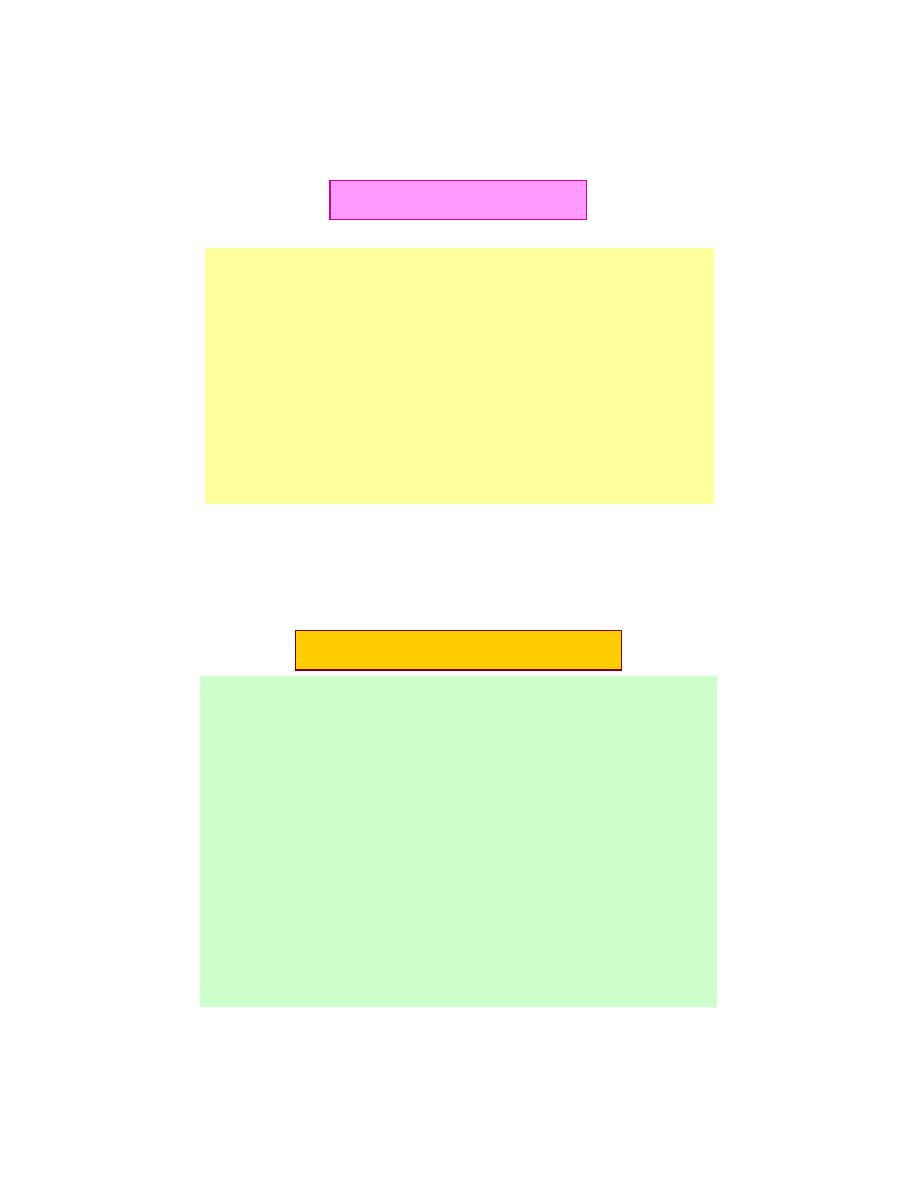
Warstwa zarz dzania
Zadania warstwy:
Zadania warstwy:
Opracowanie i aktualizacja planów produkcji i remontów
Wykorzystywane metody sterowania:
Wykorzystywane metody sterowania:
Sterowanie w torze otwartym z adaptacj modelu
Horyzont sterowania:
Horyzont sterowania:
Od 1 tygodnia do 1 kwartału
Warstwy systemu automatyki (1)
Warstwa zarz dzania operatywnego
Zadania warstwy:
Zadania warstwy:
1. Osi gni cie zadanej wielko ci produkcji w warunkach
normalnych.
2. Przewidywanie stanów awaryjnych i zapobieganie im.
3. Osi gni cie mo liwie du ej produkcji w warunkach
awaryjnych
Wykorzystywane metody sterowania:
Wykorzystywane metody sterowania:
sterowanie w torze otwartym z adaptacj modelu,
kompensacja zakłóce .
Horyzont sterowania:
Horyzont sterowania:
od 1 zmiany do 1 doby.
Warstwy systemu automatyki (2)
7
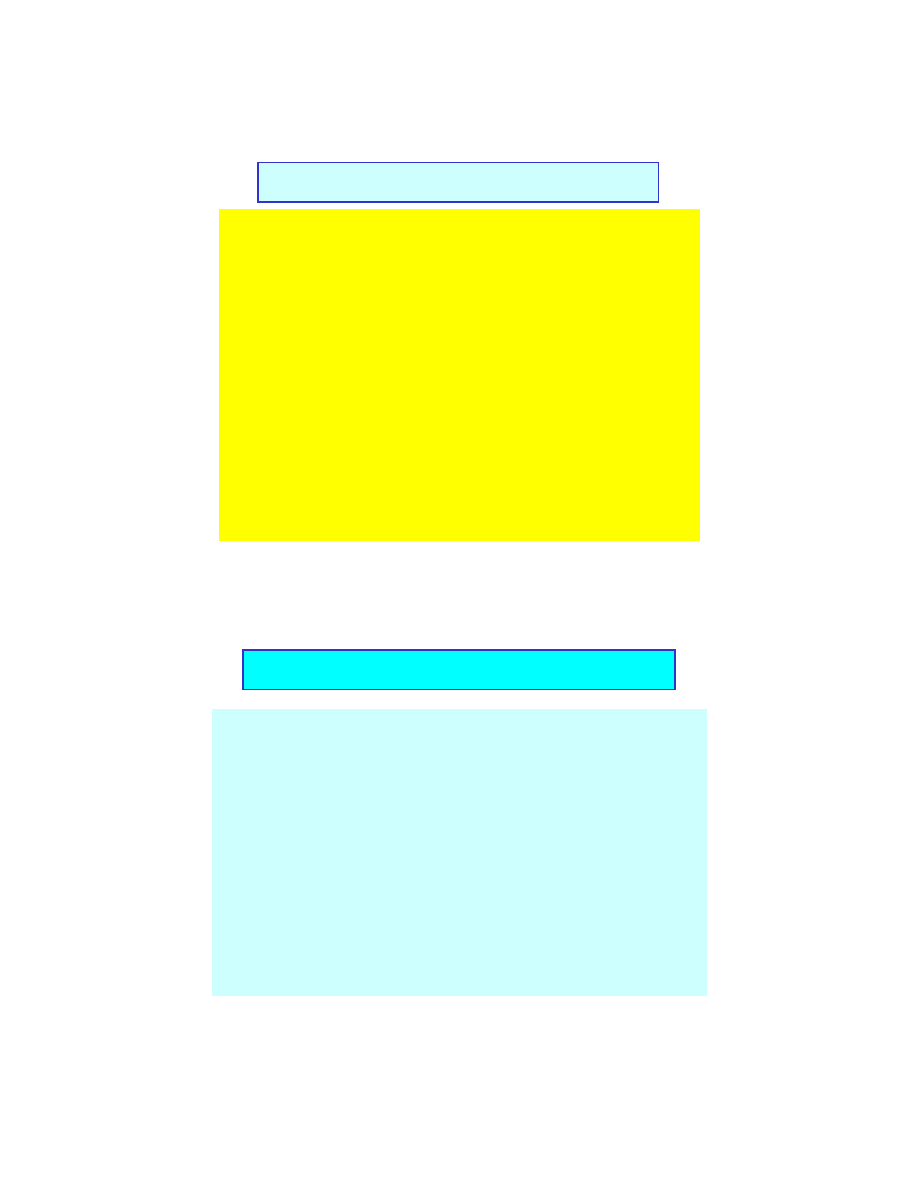
Warstwa sterowania i regulacji nadrz dnej
Zadania warstwy:
Zadania warstwy:
1. Osi gni cie zadanej jako ci produkcji.
2. Doprowadzenie maszyn i urz dze do zdanego stanu pracy.
3. Koordynacja pracy nap dów, wypracowanie decyzji o blokadach i
zabezpieczeniach.
4. Automatyczne zał czanie rezerwy.
Wykorzystywane metody sterowania:
Wykorzystywane metody sterowania:
1. Sterowanie automatyczne adaptacyjne lub optymalne w torze
otwartym lub zamkni tym.
2. Sterowanie logiczne kombinacyjne lub sekwencyjne.
3. Sterowanie r czne.
Horyzont sterowania:
Horyzont sterowania:
od 0 do 1 godziny.
Warstwy systemu automatyki (3)
Warstwa sterowania i regulacji bezpo redniej
Zadania warstwy:
Zadania warstwy:
1. Stabilizacja przepływu mas i energii w aparatach.
2. Koordynacja przepływu mas i energii za pomoc wielko ci wiod cej.
3. Koordynacja pracy nap dów.
Wykorzystywane metody sterowania:
Wykorzystywane metody sterowania:
1. Automatyczna regulacja - stałowarto ciowa, programowa lub
nad na.
2. Sterowanie logiczne kombinacyjne lub sekwencyjne.
3. Sterowanie r czne.
Horyzont sterowania:
Horyzont sterowania:
od 0 do 10 minut.
Warstwy systemu automatyki (4)
8
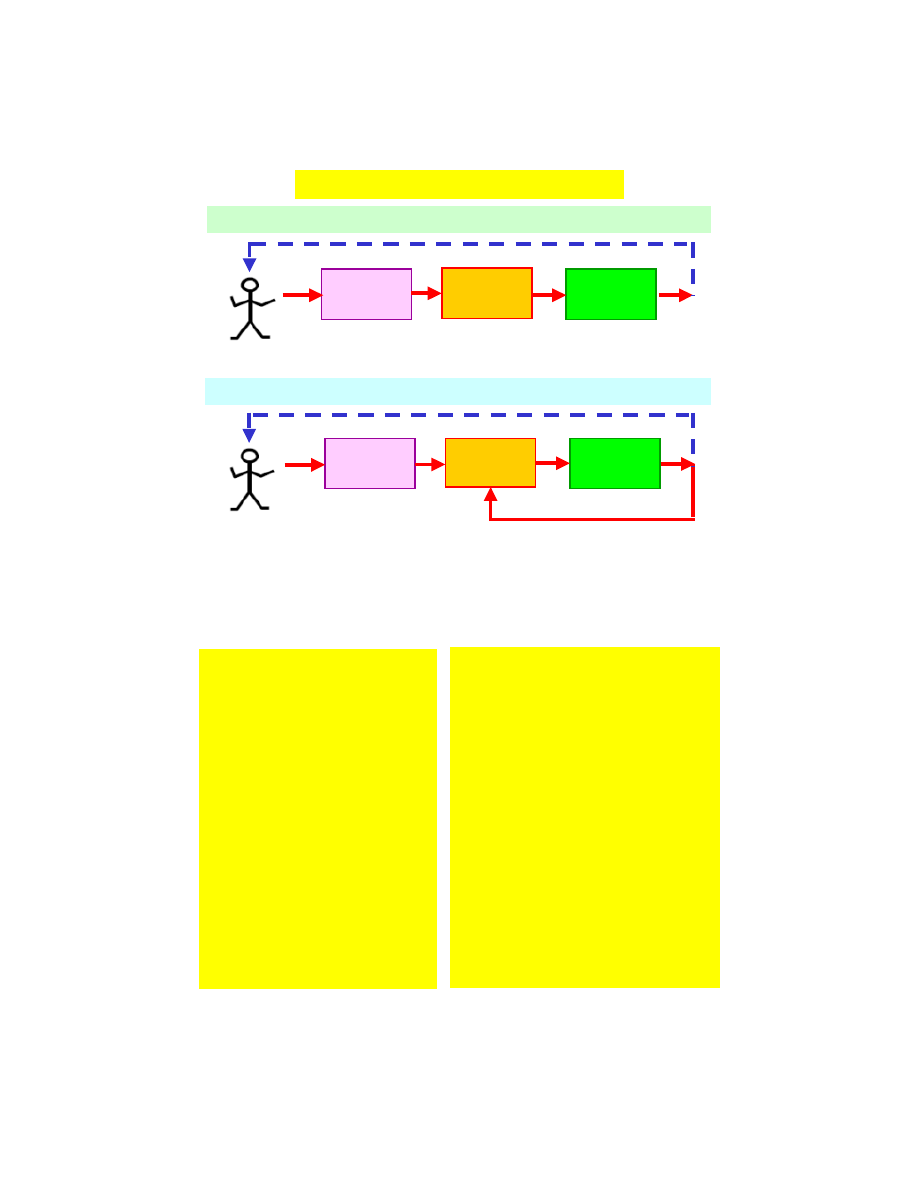
Rodzaje sterowania
Podstawowe sposoby sterowania:
Podstawowe sposoby sterowania:
sterowanie w układzie otwartym (regulacja r czna)
sterowanie w układzie zamkni tym (regulacja automatyczna)
Zadanie
sterowania
Układ
sterowania
Obiekt
sterowania
Zadanie
sterowania
Regulator
Obiekt
sterowania
Człowiek
Człowiek
Człowiek
Człowiek
Porównanie sterowania z regulacj
Sterowanie:
Sterowanie:
Otwarty ła cuch działa
Obiekt musi by
dokładnie znany
Nie mo e reagowa na
zakłócenia
Nie ma porównywania
sygnału zadanego z
rzeczywistym
Nie s potrzebne
sensory
Stabilno obiektu nie
ulega zmianie
Regulacja:
Regulacja:
Zamkni ty ła cuch działa
Obiekt nie musi by
dokładnie znany (odporno
na zmiany parametrów)
Mo na wyregulowa
zakłócenia (kompensacja
zakłóce )
Jest porównywanie sygnału
zadanego z rzeczywistym
Niezb dne s sensory
Zamkni ty obwód regulacji
mo e by niestabilny
9
Typowe zadania regulacji realizowane w zamkni tych
układach regulacji:
- regulacja stałowarto ciowa (stabilizacja),
- regulacja programowa,
- regulacja nad na,
- regulacja ekstremalna.
Dawniej te zadania realizowały wył cznie specjalne
regulatory sprz towe. Natomiast obecnie zadania te
realizuj tak e procedury regulacyjne ulokowane w
oprogramowaniu sterowników programowalnych lub
komputerów przemysłowych.
Zadania regulacji
Typowe zadania sterowania logicznego:
sterowanie kombinacyjne,
sterowanie sekwencyjne.
Układy sterowania sekwencyjnego musz zawiera
pami stanów wcze niejszych, czyli działaj w oparciu
o sprz enie zwrotne, a wi c mog by uwa ane
równie za specyficzne układy regulacji.
Specjalne zadania sterowania nadrz dnego realizowane
w układach otwartych lub zamkni tych:
sterowanie adaptacyjne,
sterowanie optymalne.
Sterowanie logiczne i nadrz dne
10
Zakłócenia w pracy systemu automatyki
Zakłócenia
Zakłócenia w pracy systemu automatyki s
spowodowane przez:
zmiany fizycznych zmiennych procesowych,
gwałtowne zmiany struktury procesu w wyniku awarii
maszyn i urz dze ,
zmiany parametrów aparatury w wyniku starzenia si ,
zmiany wła ciwo ci i poda y surowców i materiałów,
zmiany zada produkcyjnych wynikaj cych ze zmiany
wielko ci lub rodzaju produkcji,
zmiany parametrów ekonomicznych (ceny produktów,
koszty surowców, materiałów i energii),
zmiany popytu na produkty.
Klasyfikacja układów sterowania - liniowo
Kryteria klasyfikacji układów sterowania:
Kryteria klasyfikacji układów sterowania:
1) liniowo ,
2) sposób przekazywania informacji w układzie,
3) liczba wielko ci regulowanych,
4) sposób wyra enia zadania sterowania,
5) rodzaj aparatury steruj cej.
Ad 1.
Ad 1. Ze wzgl du na kryterium liniowo ci układy sterowania dzieli si na liniowe i nieliniowe.
Układy liniowe zawieraj wył cznie elementy liniowe, tzn. takie, których charakterystyki statyczne s liniami
prostymi, za własno ci dynamiczne opisuj liniowe równania ró niczkowe zwyczajne, całkowe, ró nicowe lub
algebraiczne. Układy liniowe spełniaj zasad superpozycji, co oznacza, e w przypadku zło onych wymusze
analiza układu mo e by przeprowadzona oddzielnie dla ka dego z nich, a ko cowy wynik mo na uzyska na
drodze superpozycji wyników cz stkowych. W praktyce wi kszo elementów nie spełnia wymogów liniowo ci,
lecz je li elementy pracuj w w skim zakresie zmian (wokół pewnego punktu pracy), to charakterystyki tych
elementów mo na traktowa jako prostoliniowe w otoczeniu punktu pracy.
Układy nieliniowe to takie, które zawieraj co najmniej jeden element nieliniowy. Do analizy układów
nieliniowych stosuje si metody pozwalaj ce uwzgl dni ró ne rodzaje wyst puj cych nieliniowo ci. Dokładne
metody analizy s bardzo zło one i dlatego najcz ciej stosuje si metody przybli one. Zagadnienie to
wymagałoby szerszego omówienia (zainteresowanych odsyłamy do podr czników z zakresu teorii sterowania).
Cz sto dokonuje si linearyzacji charakterystyk w otoczeniu punktu pracy zakładaj c pewne uproszczenia i
licz c si z niedokładno ci takiej analizy. Takie uproszczenie opisu układów nie zawsze jest jednak mo liwe i
mo e prowadzi do znacznych bł dów.
11
Klasyfikacja układów sterowania c.d.
Ad 2.
Ad 2. Przekazywanie informacji (sygnałów) w układach sterowania jest mo liwe
w sposób ci gły lub dyskretny.
W przypadku ci głych układów sterowania wszystkie sygnały s opisane
funkcjami ci głymi w czasie oraz funkcje te mog przyjmowa wszystkie warto ci
mieszcz ce si w przedziale ich zmienno ci. Natomiast dyskretne układy
sterowania maj przynajmniej jeden element działaj cy w sposób dyskretny, tzn.
e sygnały na wyj ciu tego elementu mog przyjmowa tylko niektóre wybrane
warto ci (opisane np. funkcj schodkow ) lub sygnały wyst puj w okre lonych
momentach czasu. W tym ostatnim przypadku mamy do czynienia z tzw.
układami impulsowymi.
Ad 3.
Ad 3. Je eli w układzie sterowania wyst puje tylko jedna wielko regulowana, to
mówimy o układzie jednowymiarowym; a je li wi cej, to mówimy o układzie
wielowymiarowym. Niekiedy wielowymiarowy układ sterowania udaje si
rozdzieli na kilka układów jednowymiarowych, szczególnie wówczas, gdy
wzajemny wpływ poszczególnych wielko ci regulowanych jest znikomy. Gdy
wzajemnego wpływu wielko ci regulowanych na siebie nie da si pomin , to
dokonujemy analizy układu za pomoc metod sterowania wielowymiarowego,
których stosowanie jest o wiele trudniejsze i z reguły mniej efektywne.
Ad 4.
Ad 4. Zadanie sterowania mo e by wyra one przez charakter sygnału
zadanego lub przez pewne wymagania co do struktury układu.
Funkcje systemu SCADA
Funkcje systemu SCADA (ang.
Supervisory Control and Data Acqusition)
:
:
• komunikacja ze sterownikami, regulatorami mikroprocesorowymi,
koncentratorami danych,
• przetwarzanie zmiennych procesowych (obliczenia zmiennych
niemierzalnych, bilansów, wska ników statystycznych i syntetycznych),
• oddziaływanie na proces, np. sterowanie r czne z konsoli operatorskiej,
zmiana warto ci zadanych i parametrów algorytmów regulacji, czasem
tak e sterowanie bezpo rednie w układzie zamkni tym (regulacja) i
otwartym (sterowanie binarne, procedury awaryjne),
• kontrola procesu - sygnalizacja alarmów i raportowanie,
• archiwizacja danych,
• wizualizacja graficzna przebiegu procesu na schematach synoptycznych i
wykresach,
• wymiana danych z innymi systemami oraz bazami danych,
• funkcje „in ynierskie” pozwalaj ce na dokonywanie zmian w bie cej
konfiguracji systemu (modyfikacje obrazów i algorytmów),
• kontrola dost pu do systemu poprzez hierarchi uprawnie .
Zadania systemów SCADA
12
Automatyzacja - wymagania
Pod poj ciem
automatyzacji
automatyzacji
rozumie si proces
wprowadzania zasad i metod
automatyki i sterowania do
okre lonej dziedziny
działalno ci człowieka.
Wska niki jako ci:
Wska niki jako ci:
Niezawodno :
Niezawodno :
przewidywalne i poprawne działanie systemu w ka dej chwili
Wydajno :
Wydajno :
wysoka wydajno systemu w obszarze pracy
Elastyczno :
Elastyczno :
działanie w warunkach zmiany parametrów pracy
Dyspozycyjno :
Dyspozycyjno :
minimalne czasy awarii systemu
Bezpiecze stwo:
Bezpiecze stwo:
brak szkód dla ludzi i rodowiska podczas pracy
Odporno :
Odporno :
zdolno do działania przy zmianie parametrów otoczenia
Zdolno dopasowania:
Zdolno dopasowania: systemu do zmieniaj cych si wymaga pracy
Sygnał jest to dowolna wielko fizyczna nios ca
Sygnał jest to dowolna wielko fizyczna nios ca
informacj
informacj (no nik informacji).
Podziały sygnałów:
elektryczne, hydrauliczne, pneumatyczne,
deterministyczne (daj si opisa ci le okre lon zale no ci
matematyczn , s powtarzalne): harmoniczne,
poliharmoniczne, prawie okresowe i przej ciowe,
stochastyczne (losowe) opisuje si :
- parametrami rozkładu zmiennej losowej (warto
redniokwadratowa – warto rednia
2
= wariancja, mediany
itd.),
- funkcjami w dziedzinie amplitud - dystrybuanta, rozkład
prawdopodobie stwa amplitud,
- w dziedzinie czasu – korelacja,
- w dziedzinie cz stotliwo ci – g sto widmowa mocy,
niemodulowane i modulowane,
ci głe i dyskretne (w tym cyfrowe).
Sygnały
13
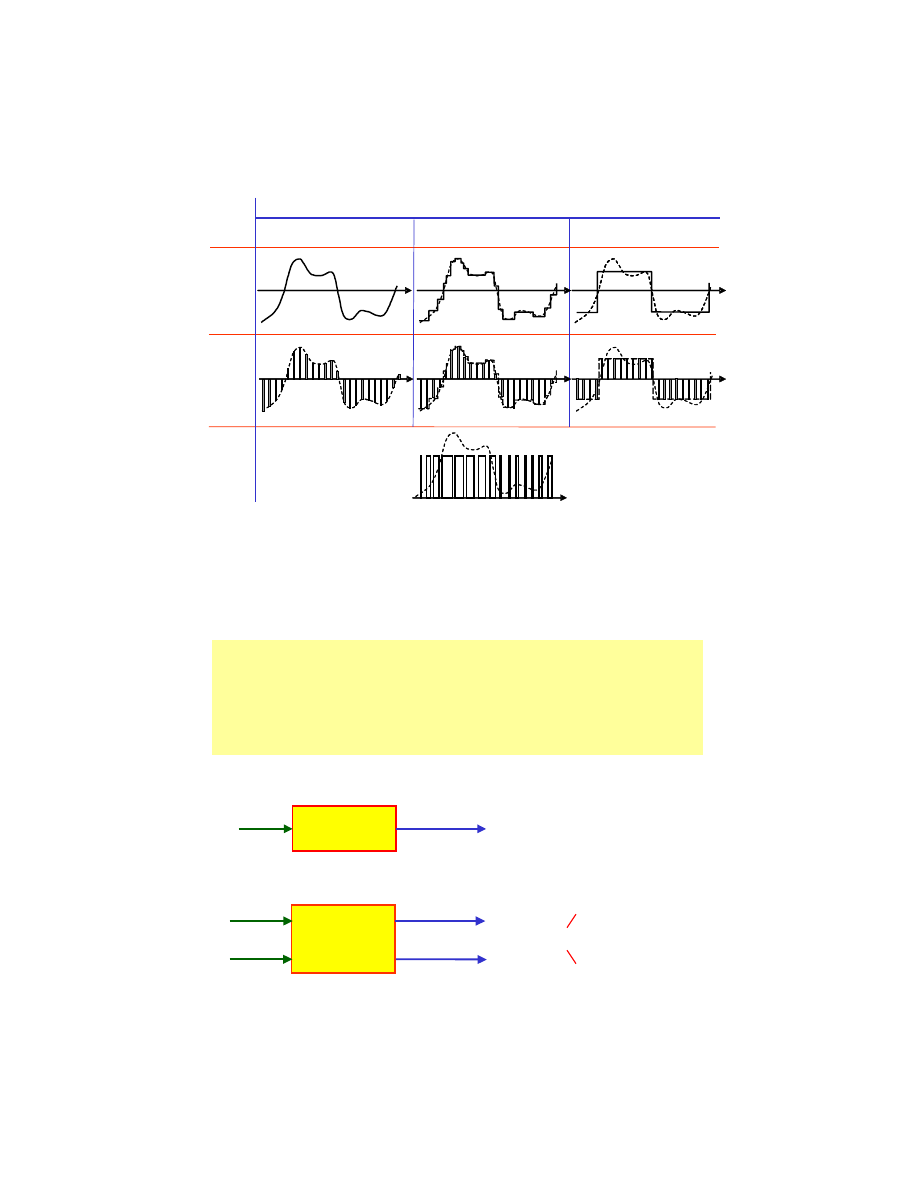
Typy sygnałów
Sygnał
ci gły
Sygnał
dyskretny,
stały czas
próbko-
wania
Sygnał
impulso-
wy
Sygnał analogowy
Sygnał kwantowany
Sygnał binarny
Typ
Typ
sygnału
sygnału
Typ sygnału w amplitudzie
Typ sygnału w amplitudzie
t
t
t
t
t
t
t
Stała amplituda, sygnał
typu zał cz-wył cz
Elementem automatyki
Elementem automatyki
(lub
(lub
członem
członem
) nazywa si dowolny
) nazywa si dowolny
zespół, przyrz d czy urz dzenie wyst puj ce w układzie
zespół, przyrz d czy urz dzenie wyst puj ce w układzie
automatyki, spełniaj cy proste funkcje, w którym mo na
automatyki, spełniaj cy proste funkcje, w którym mo na
wyró ni sygnał wej ciowy i wyj ciowy (np.: czujnik, silnik,
wyró ni sygnał wej ciowy i wyj ciowy (np.: czujnik, silnik,
wzmacniacz, itp.).
wzmacniacz, itp.).
Podstawowe poj cia
Podstawowe poj cia
–
–
układy ci głe
układy ci głe
14
Charakterystyki członów automatyki
x(t)
y(t)
x(t) – sygnał wej ciowy
y(t) – sygnał wyj ciowy
Człon automatyki
Własno ci członu automatyki mog by opisane w dziedzinie czasu
t
t za
pomoc równania ró niczkowego lub ró nicowego okre laj cego zale no
sygnału wyj ciowego y(t) od wej ciowego x(t), np.:
T
⋅⋅⋅⋅
y(t) + y(t) = k
⋅⋅⋅⋅
x(t)
.
Natomiast w praktyce własno ci członów i układów automatyki s
opisywane za pomoc
transmitancji operatorowej G(s)
transmitancji operatorowej G(s) lub
widmowej G(j
widmowej G(j
ω
ω
ω
ω
ω
ω
ω
ω
)
).
X(s)
Y(s)
Człon automatyki
G(s)
G(s)
X(s) – transformata
sygnału wej ciowego
Y(s) – transformata
sygnału wyj ciowego
s- operator Laplace’a
T
⋅⋅⋅⋅
Y(s) s + Y(s) = k X(s),
Dla powy szego równania
ró niczkowego
otrzymujemy nast puj ce
równanie operatorowe:
G(s) =
Y(s)
X(s)
Y(s)
k
G(s) = =
X(s) T s + 1
Transmitancja
Transmitancja
operatorowa:
operatorowa:
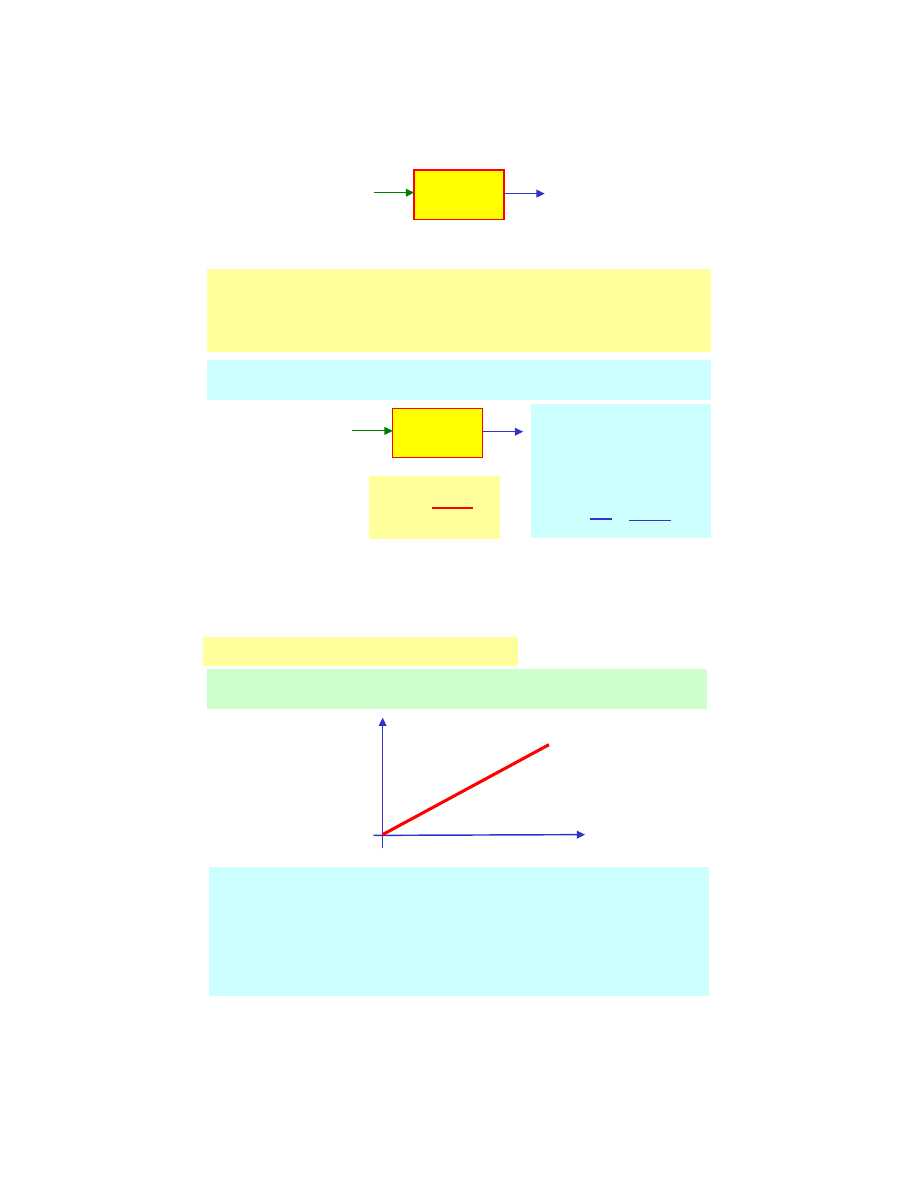
Charakterystyki członów automatyki
Opis własno ci członów automatyki obejmuje:
1.
Charakterystyk statyczn
Charakterystyk statyczn , która okre la zale no sygnału wyj ciowego
od wej ciowego w stanie ustalonym (stany sygnałów nie zmieniaj si ).
x
y
y = f(x)
2.
Charakterystyki dynamiczne
Charakterystyki dynamiczne, które okre laj przebieg sygnału
wyj ciowego w stanach przej ciowych, tzn. przy zmianach sygnałów.
W ród charakterystyk dynamicznych wyró nia si
charakterystyki w
charakterystyki w
dziedzinie czasu
dziedzinie czasu (np. charakterystyka skokowa) oraz
charakterystyki w
charakterystyki w
dziedzinie cz stotliwo ci
dziedzinie cz stotliwo ci (charakterystyka amplitudowo-
cz stotliwo ciowa, charakterystyka fazowo-cz stotliwo ciowa oraz
charakterystyka zespolona).

15
Charakterystyka skokowa okre la przebieg sygnału wyj ciowego y(t) z
członu po wymuszeniu sygnałem skokowym x(t).
t
x, y
x(t)
y(t)
x, y
t
1(t)
y(t)
Szczególnym przypadkiem charakterystyki skokowej jest odpowied członu
na wymuszenie skokiem jednostkowym 1(t).
Charakterystyka skokowa
Charakterystyki cz stotliwo ciowe
Charakterystyki cz stotliwo ciowe okre laj zachowanie członu na
wymuszenie sygnałem harmonicznym (sinusoidalnym).
x(t) = A
x
sin (
ω
ω
ω
ω
t)
y(t) = A
y
sin (
ω
ω
ω
ω
t +
ϕϕϕϕ
)
G(j
ω
ω
ω
ω
)
Modu
Modu
ł
ł
:
:
M(
M(
ω
ω
ω
ω
ω
ω
ω
ω
)
)
=
=
A
A
y
y
(
(
ω
ω
ω
ω
ω
ω
ω
ω
) /
) /
A
A
x
x
(
(
ω
ω
ω
ω
ω
ω
ω
ω
)
)
Argument:
Argument:
ϕϕϕϕ
ϕϕϕϕ
(
(
ω
ω
ω
ω
ω
ω
ω
ω
)
) – k t przesuni cia
fazowego
ϕϕϕϕ
(
ω
ω
ω
ω
)
A
x
(
ω
ω
ω
ω
)
A
y
(
ω
ω
ω
ω
)
t
ω
ω
ω
ω
= 2
Π
Π
Π
Π
f
ω
ω
ω
ω
- pulsacja kołowa [rad/s]
f – cz stotliwo
[Hz]
A
x
(
ω
ω
ω
ω
) – amplituda sygnału
wej ciowego
A
x
(
ω
ω
ω
ω
) – amplituda sygnału
wyj ciowego
16
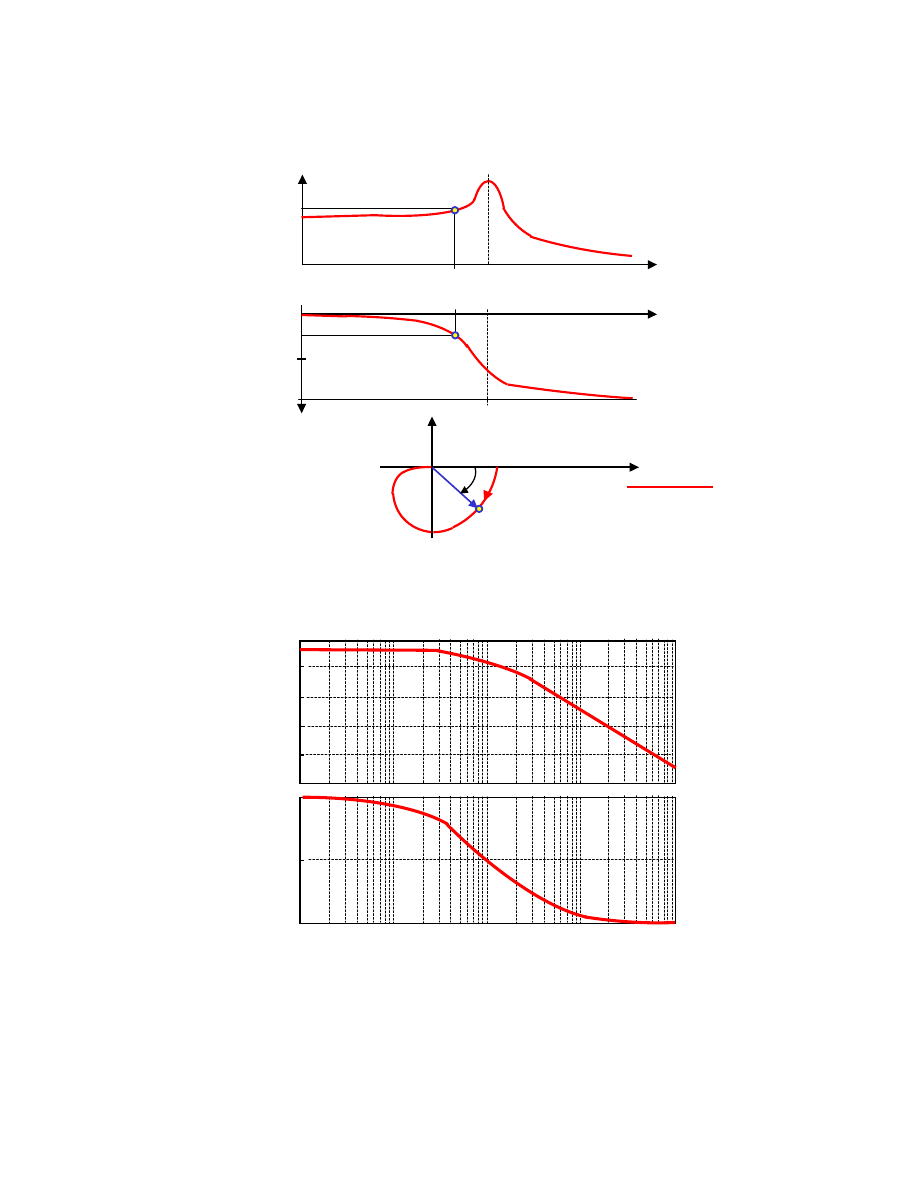
Charakterystyki cz stotliwo ciowe
Charakterystyka
Charakterystyka
amplitudowo
amplitudowo
-
-
fazowa
fazowa
(zespolona
charakterystyka
cz stotliwo ciowa)
Charakterystyka amplitudowo
Charakterystyka amplitudowo
-
-
cz stotliwo ciowa
cz stotliwo ciowa
P(
ω
ω
ω
ω
)
j Q(
ω
ω
ω
ω
)
ϕϕϕϕ
(
ω
ω
ω
ω
)
M
(
ω
ω
ω
ω
)
ω
ω
ω
ω
=
0
ω
ω
ω
ω
=
∞
∞
∞
∞
ω
ω
ω
ω
i
Charakterystyka fazowo
Charakterystyka fazowo
-
-
cz stotliwo ciowa
cz stotliwo ciowa
ω
ω
ω
ω
ϕϕϕϕ
(
ω
ω
ω
ω
)
-90
o
-180
o
ω
ω
ω
ω
i
ϕϕϕϕ
(
ω
ω
ω
ω
i
)
ω
ω
ω
ω
ω
ω
ω
ω
0
M(
ω
ω
ω
ω
)
ω
ω
ω
ω
i
M
i
(
ω
ω
ω
ω
)
G(j
ω
ω
ω
ω
) = P(
ω
ω
ω
ω
) + jQ(
ω
ω
ω
ω
)
G(j
ω
ω
ω
ω
) = M(
ω
ω
ω
ω
) e
j
ϕϕϕϕ
(
ω
ωω
ω
)
M(
ω
ω
ω
ω
)=
G(j
ω
ω
ω
ω
)
=
√√√√
P(
ω
ω
ω
ω
)
2
+ Q(
ω
ω
ω
ω
)
2
ϕϕϕϕ
(
ω
ω
ω
ω
)
= arctg -------
Q(
ω
ω
ω
ω
)
P(
ω
ω
ω
ω
)
Logarytmiczne charakterystyki
cz stotliwo ciowe (wykresy Bode’go)
Cz stotliwo f [Hz]
10
-2
10
-1
10
0
10
1
10
2
-90
-45
0
Fa
za
ϕϕϕϕ
[d
eg
]
10
0
-10
-20
-30
-40
M
ag
ni
tu
da
L
[d
b]
L(
ω
ω
ω
ω
) [dB] = 20 log M(
ω
ω
ω
ω
)
17
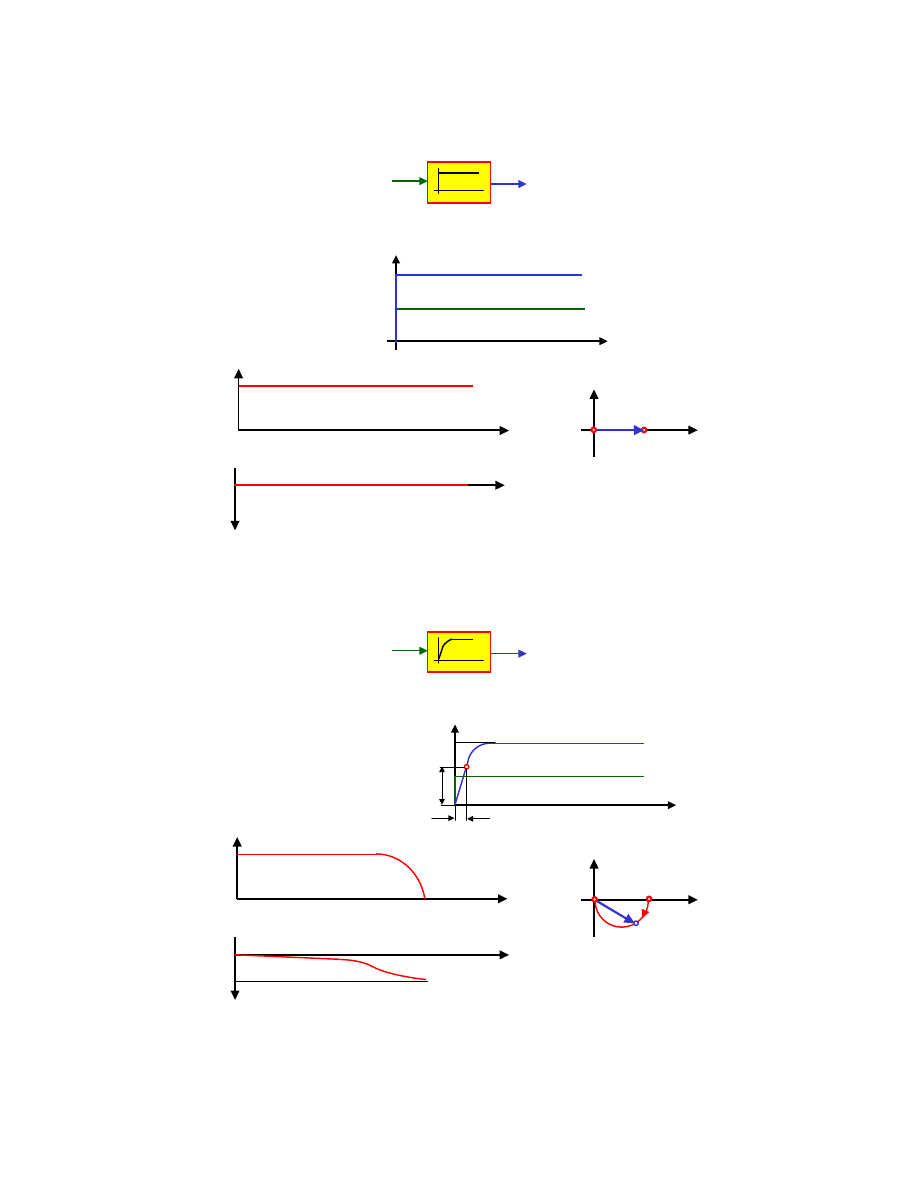
Podstawowe człony automatyki – człon proporcjonalny
x(t)
y(t)
Równanie ró niczkowe:
y(t) = k
y(t) = k
·
·
x(t)
x(t)
k – współczynnik wzmocnienia
Równanie operatorowe:
Y(s) = k X(s)
Charakterystyka skokowa
Charakterystyka amplitudowo-cz stotliwo ciowa
ω
ω
ω
ω
[rad/s]
M(
ω
ω
ω
ω
)
Charakterystyka fazowo-cz stotliwo ciowa
ϕϕϕϕ
(
ω
ω
ω
ω
)
Przykłady:
Przykłady: d wignia
dwuramienna, wzmacniacz
t
x(t)
y(t)
x, y
Transmitancja operatorowa:
G(s) = k
G(s) = k
Charakterystyka
amplitudowo-fazowa
ω
ω
ω
ω
[rad/s]
Im[G(j
ω
ω
ω
ω
)]
Re[G(j
ω
ω
ω
ω
)]
ω
ω
ω
ω
= 0
ω
ω
ω
ω
=
∞
∞
∞
∞
M(
ω
ω
ω
ω
)
Podstawowe człony automatyki – człon inercyjny (1-go rz du)
Równanie ró niczkowe:
T y(t) + y(t) = k x(t)
T y(t) + y(t) = k x(t)
k – współczynnik wzmocnienia
T – stała czasowa
Równanie operatorowe:
T Y(s) s + Y(s) = k X(s)
Charakterystyka skokowa
Charakterystyka amplitudowo-cz stotliwo ciowa
Charakterystyka fazowo-cz stotliwo ciowa
Przykłady: wiruj ce zespoły,
Przykłady: wiruj ce zespoły,
układy grzejne
układy grzejne
x, y
Transmitancja operatorowa:
G(s) =
G(s) =
---------
---------
Charakterystyka
amplitudowo-fazowa
x(t)
y(t)
·
·
T s + 1
T s + 1
k
k
y(t) = k x(t) (1- e ) = y
o
(1- e
)
T
---
t
Dla t =T y(t) = 0,632 y
o
t
x(t)
y(t)
T
y
o
- --
t
T
ω
ω
ω
ω
[rad/s]
M(
ω
ω
ω
ω
)
ϕϕϕϕ
(
ω
ω
ω
ω
)
-90
o
ω
ω
ω
ω
[rad/s]
Im[G(j
ω
ω
ω
ω
)]
Re[G(j
ω
ω
ω
ω
)]
ω
ω
ω
ω
= 0
ω
ω
ω
ω
=
∞
∞
∞
∞
M(
ω
ω
ω
ω
)
18
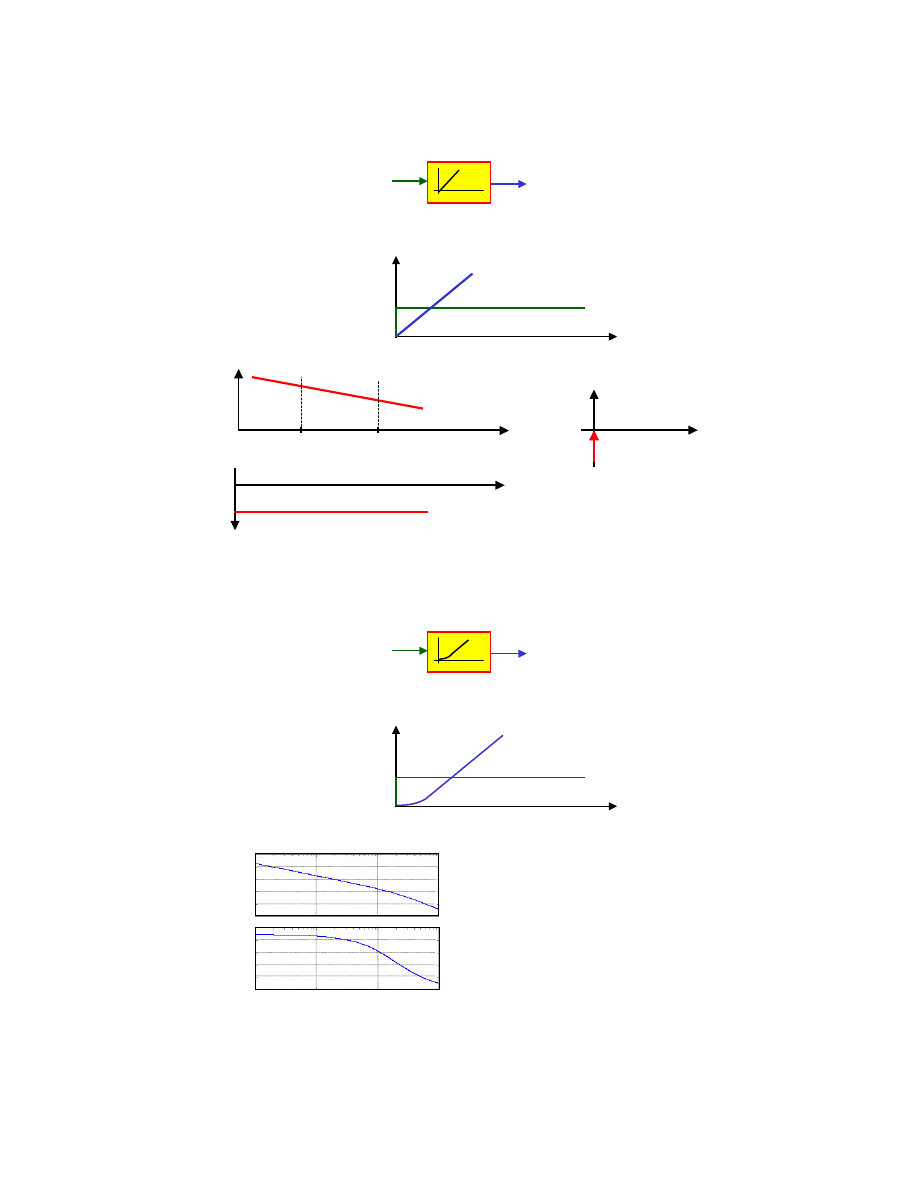
Podstawowe człony automatyki – człon całkuj cy idealny
Równanie:
y(t)
y(t)
= k
= k
x(t)
x(t)
dt
dt
k – współczynnik wzmocnienia
Równanie operatorowe:
Y(s) s = k X(s)
Charakterystyka skokowa
Charakterystyka amplitudowo-cz stotliwo ciowa
ω
ω
ω
ω
[rad/s]
Charakterystyka fazowo-cz stotliwo ciowa
Przykłady: kondensator
Przykłady: kondensator
(idealny), zbiornik z dopływem
(idealny), zbiornik z dopływem
cieczy
cieczy
x, y
Transmitancja operatorowa:
G(s) =
G(s) =
---
---
Charakterystyka
amplitudowo-fazowa
x(t)
y(t)
t
t
s
s
k
k
t
x(t)
y(t)
L(
ω
ω
ω
ω
)
[dB]
ϕϕϕϕ
(
ω
ω
ω
ω
)
-90
o
Im[G(j
ω
ω
ω
ω
)]
Re[G(j
ω
ω
ω
ω
)]
ω
ω
ω
ω
= 0
ω
ω
ω
ω
=
∞
∞
∞
∞
M(
ω
ω
ω
ω
)
0
0
-20dB/dekad
ω
ω
ω
ω
[rad/s]
10
100
Podstawowe człony automatyki – człon całkuj cy rzeczywisty
Równanie:
T
T
y(t)
y(t)
+ y(t) = k
+ y(t) = k
x(t)
x(t)
dt
dt
k – współczynnik wzmocnienia
T – stała czasowa
Charakterystyka skokowa
Charakterystyki cz stotliwo ciowe
Przykłady: silnik elektryczny,
Przykłady: silnik elektryczny,
siłownik hydrauliczny
siłownik hydrauliczny
x, y
Transmitancja operatorowa:
G(s) =
G(s) =
--------------
--------------
x(t)
y(t)
t
t
s (1 + T s)
s (1 + T s)
k
k
t
x(t)
y(t)
0
0
.
.
10
-3
10
-2
10
-1
10
0
ω
ωω
ω
[rad/s]
-
80
-
100
-
120
-
140
-
160
-
180
100
80
60
40
20
0
L(
ω
ωω
ω
) [dB]
ϕϕϕϕ
(
ω
ωω
ω
) [deg]
19
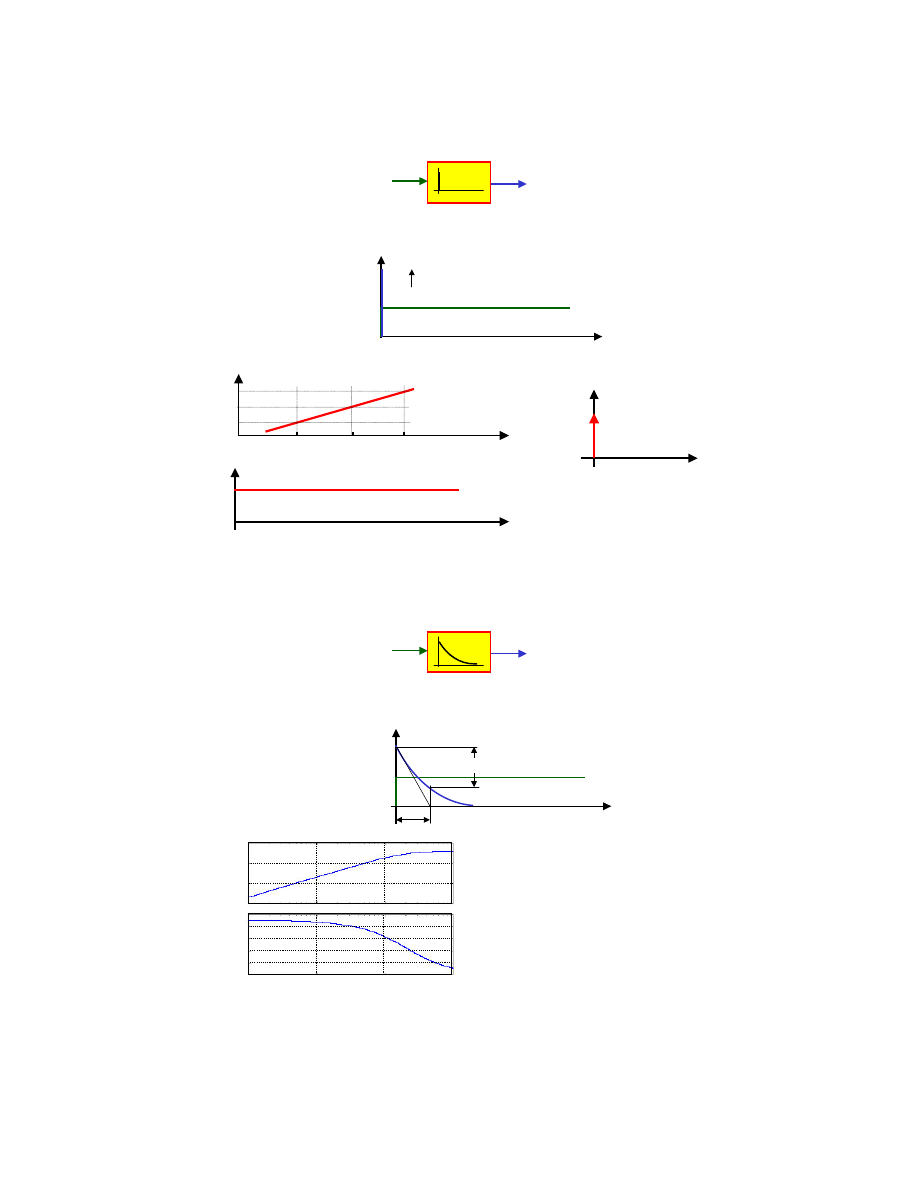
Podstawowe człony automatyki – człon ró niczkuj cy idealny
Równanie:
y(t)
y(t)
= k x(t)
= k x(t)
k – współczynnik wzmocnienia
Charakterystyka skokowa
Charakterystyka amplitudowo-cz stotliwo ciowa
ω
ω
ω
ω
[rad/s]
Charakterystyka fazowo-cz stotliwo ciowa
Przykłady: idealna spr yna,
Przykłady: idealna spr yna,
pr dnica
pr dnica
techometryczna
techometryczna
bez
bez
strat
strat
Transmitancja operatorowa:
G(s) = k s
G(s) = k s
Charakterystyka
amplitudowo-fazowa
x(t)
y(t)
L(
ω
ω
ω
ω
)
[dB]
ω
ω
ω
ω
[rad/s]
ϕϕϕϕ
(
ω
ω
ω
ω
)
+90
o
Im[G(j
ω
ω
ω
ω
)]
Re[G(j
ω
ω
ω
ω
)]
ω
ω
ω
ω
= 0
ω
ω
ω
ω
=
∞
∞
∞
∞
M(
ω
ω
ω
ω
)
.
.
Równanie operatorowe:
Y(s) = k X(s) s
x, y
t
x(t)
y(t)
+
∞
∞
∞
∞
+20dB/dekad
10
-3
10
-2
10
-1
0
20
40
60
Podstawowe człony automatyki – człon ró niczkuj cy
rzeczywisty
Równanie:
T
T
y(t)
y(t)
+ y(t) = k x(t)
+ y(t) = k x(t)
k – współczynnik wzmocnienia
T – stała czasowa
Charakterystyka skokowa
Charakterystyki cz stotliwo ciowe
Przykłady:
Przykłady: układy elektryczne
zawieraj ce rezystory, kondensatory i
cewki, spr yna, pr dnice i silniki,
transformatory
x, y
Transmitancja operatorowa:
G(s) =
G(s) =
-----------
-----------
x(t)
y(t)
t
x(t)
y(t)
.
.
Równanie operatorowe:
T Y(s) s + Y(s) = k X(s) s
.
.
k s
k s
1 + T s
1 + T s
T
k/T
0,632 k/T
20
0
-20
-40
0
20
40
60
80
100
10
-3
10
-2
10
-1
10
0
ω
ωω
ω
[rad/s]
L
L(
ω
ωω
ω
) [dB]
ϕϕϕϕ
(
ω
ωω
ω
)
[deg]
20
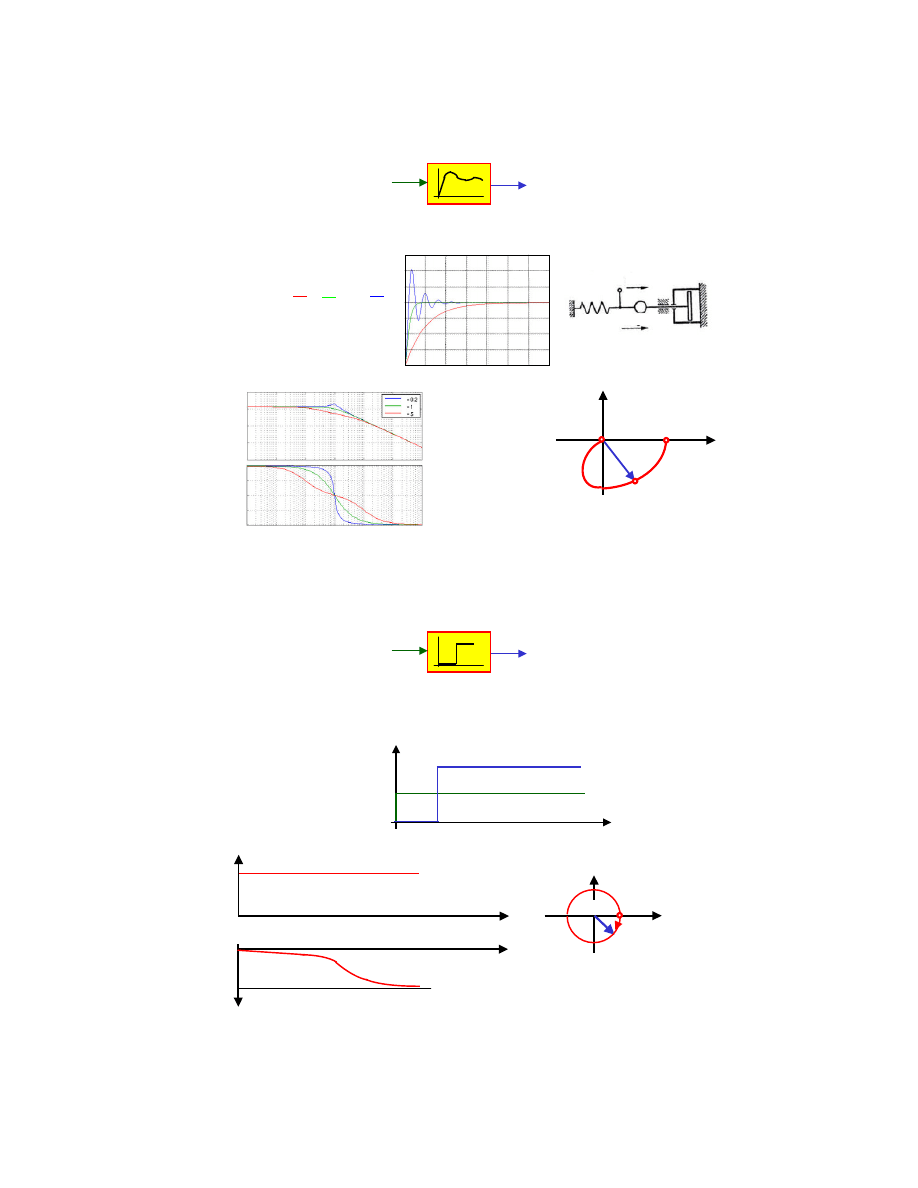
Podstawowe człony automatyki – człon oscylacyjny
Równanie:
T
T
2
2
y(t)
y(t)
+ 2
+ 2
ξξξξ
ξξξξ
T
T
y(t) + y(t) =
y(t) + y(t) =
kx
kx
(t)
(t)
k – współczynnik wzmocnienia
T – stała czasowa
ξξξξ
– współczynnik tłumienia
Charakterystyka skokowa:
k=2 , T=1,
ξξξξ
=5 ; 1 ; i 0,2
Charakterystyki cz stotliwo ciowe
Przykłady:
Przykłady:
człony gromadz ce energi
człony gromadz ce energi
-
- układy
elektryczne zawieraj ce rezystory, kondensatory i cewki,
spr yna, pr dnice i silniki, transformatory, tłumik
olejowy.
Transmitancja operatorowa:
G(s) =
G(s) =
--------------------------
--------------------------
..
..
Równanie operatorowe:
T
2
Y(s) s
2
+ 2
ξξξξ
Y(s) s = k X(s)
.
.
k
k
T
T
2
2
s
s
2
2
+ 2
+ 2
ξξξξ
ξξξξ
T s + 1
T s + 1
x(t)
y(t)
0 10 20 30 40 50 60 70 t [ s]
0
0,5
1
1,5
2
2,5
3
4
M
10
-3
10
-2
10
-1
10
0
10
1
10
2
10
3
ω
ωω
ω
[rad/s]
0
-
50
-
100
-
150
50
L(
ω
ωω
ω
) [dB}
ϕϕϕϕ
(
ω
ωω
ω
) [deg
]
0
-
45
-
90
-
135
-
180
ξξξξ
ξξξξ
ξξξξ
Charakterystyka
amplitudowo-fazowa
x = F (siła)
y = L (przesuni cie)
Im[G(j
ω
ω
ω
ω
)]
Re[G(j
ω
ω
ω
ω
)]
ω
ω
ω
ω
= 0
ω
ω
ω
ω
=
∞
∞
∞
∞
M(
ω
ω
ω
ω
)
Podstawowe człony automatyki – człon opó niaj cy
Równanie:
y(t) = k x(t
y(t) = k x(t
-
-
t
t
o
o
)
)
k – współczynnik wzmocnienia
t
o
– opó nienie
Charakterystyka skokowa
Charakterystyka amplitudowo-cz stotliwo ciowa
ω
ω
ω
ω
[rad/s]
Charakterystyka fazowo-cz stotliwo ciowa
Przykłady:
Przykłady:
ta moci g, ruroci g
ta moci g, ruroci g
x, y
Transmitancja operatorowa:
G(s) = k e
G(s) = k e
Charakterystyka
amplitudowo-fazowa
t
x(t)
y(t)
M(
ω
ω
ω
ω
)
- s t
o
x(t)
y(t)
ω
ω
ω
ω
[rad/s]
ϕϕϕϕ
(
ω
ω
ω
ω
)
360
o
Im[G(j
ω
ω
ω
ω
)]
Re[G(j
ω
ω
ω
ω
)]
ω
ω
ω
ω
= 0
ω
ω
ω
ω
=
∞
∞
∞
∞
M(
ω
ω
ω
ω
)
21
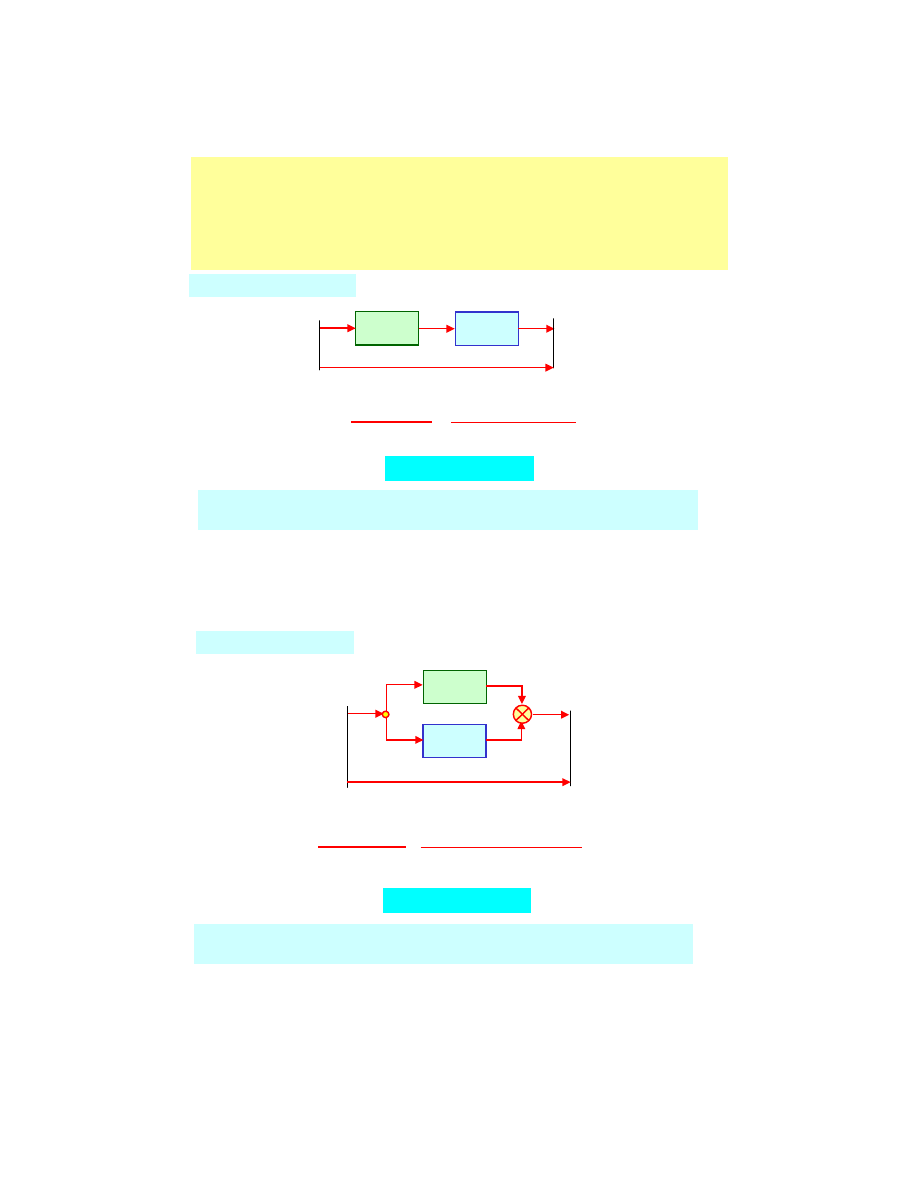
Ł czenie elementów automatyki
Elementy automatyki s ze sob ł czone w układy. Rozró nia si trzy podstawowe
sposoby poł cze elementów:
szeregowe,
równoległe,
ze sprz eniem zwrotnym.
Poł czenie szeregowe
Poł czenie szeregowe
G
G
1
1
(s)
(s)
G
G
2
2
(s)
(s)
G(s) = ?
X(s)
Y(s)
Z(s)
G(s) – transmitancja zast pcza układu
G(s) = ------ = = = G
1
(s) G
2
(s)
Y(s)
X(s)
Z(s) G
2
(s)
X(s)
X(s) G
1
(s) G
2
(s)
X(s)
Transmitancja zast pcza szeregowego poł czenia elementów jest równa
iloczynowi transmitancji poszczególnych elementów.
G(s) = G
G(s) = G
1
1
(s) G
(s) G
2
2
(s)
(s)
Poł czenie równoległe
Poł czenie równoległe
G(s) – transmitancja zast pcza układu
G(s) = ------ = = = G
1
(s) + G
2
(s)
Y(s)
X(s)
X(s) G
1
(s) + X(s) G
2
(s)
X(s)
Transmitancja zast pcza równoległego poł czenia elementów jest równa
sumie transmitancji poszczególnych elementów składowych.
G(s) = G
G(s) = G
1
1
(s) + G
(s) + G
2
2
(s)
(s)
G
G
1
1
(s)
(s)
G
G
2
2
(s)
(s)
G
z
(s) = ?
X(s)
Y(s)
Y
1
(s)
Y
2
(s)
+
+
Y
1
(s) + Y
2
(s)
X(s)
Poł czenie równoległe elementów automatyki
22
Poł czenie z ujemnym sprz eniem zwrotnym
Poł czenie z ujemnym sprz eniem zwrotnym
G(s) – transmitancja zast pcza układu
G
G
1
1
(s)
(s)
G
G
2
2
(s)
(s)
G(s) = ?
X(s)
Y(s)
Z(s)
-
G(s) = ------ =
Y(s)
X(s)
G
1
(s)
1 + G
1
(s) G
2
(s)
Poł czenie ze sprz eniem zwrotnym elementów automatyki
+
W(s)
Równanie w zła sumacyjnego: Z(s) = X(s) – W(s) = X(s) – Y(s) G
2
(s)
Y(s) = Z(s) G
1
(s) = [X(s) – Y(s) G
2
(s)] G
1
(s) = X(s) G
1
(s) – Y(s) G
1
(s) G
2
(s);
X(s) G
1
(s) = Y(s) + Y(s) G
1
(s) G
2
(s) = Y(s) [1+ G
1
(s) G
2
(s)]
Ujemne sprz enie
Ujemne sprz enie
zwrotne
zwrotne
Dodatnie sprz enie
Dodatnie sprz enie
zwrotne
zwrotne
G(s) = ------ =
Y(s)
X(s)
G
1
(s)
1 - G
1
(s) G
2
(s)
P tla
sprz enia
zwrotnego
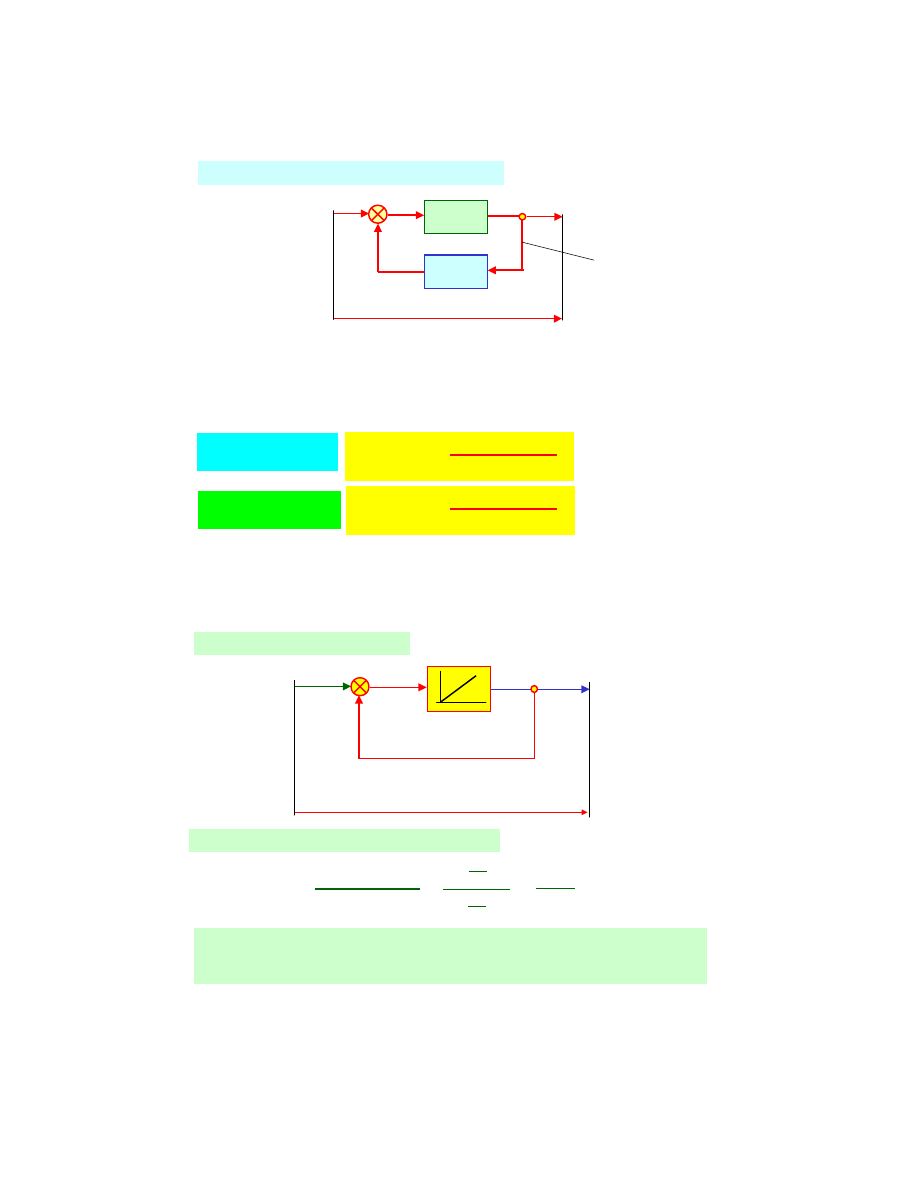
Przykłady ł czenia elementów
G
1
(s) = ---
k
s
-
+
X(s)
Y(s)
G
2
(s) = 1
G(s) = ?
G(s) = = =
Poł czenie z ujemnym sprz eniem zwrotnym
G
1
(s)
1+ G
1
(s) G
2
(s)
1+ 1
k
s
k
s
k
1+ s
Transmitancja zast pcza układu składaj cego si z elementu całkuj cego
obj tego ujemnym sprz eniem zwrotnym odpowiada charakterystyce członu
inercyjnego.
Przykład ł czenia elementów automatyki
23
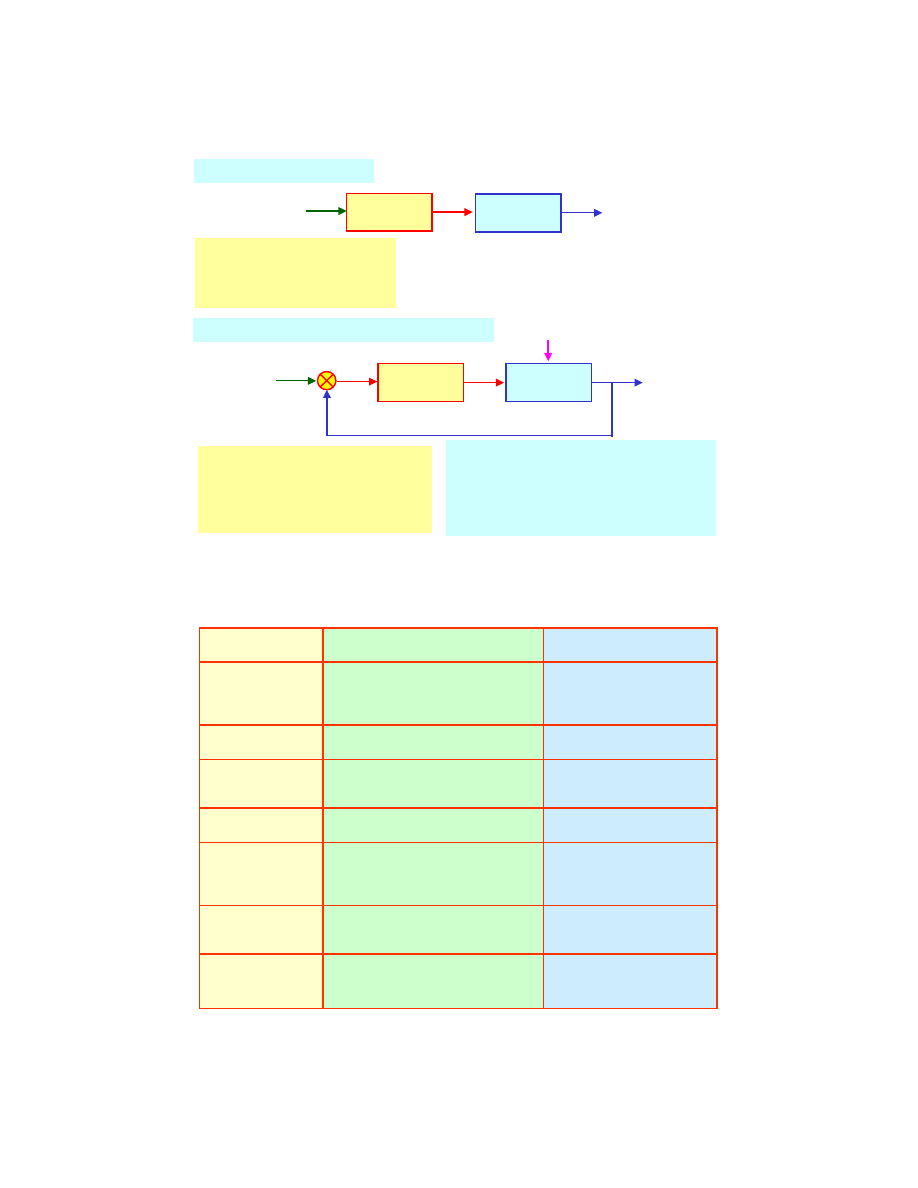
Rodzaje układów sterowania
Sterownik
Obiekt
Otwarty układ sterowania
Otwarty układ sterowania
w(t)
x(t)
y(t)
w(t) – wielko zadana
x(t) – wielko nastawiaj ca
y(t) – wielko sterowana
Zamkni ty układ sterowania (układ regulacji)
Zamkni ty układ sterowania (układ regulacji)
Obiekt
Regulator
x(t)
w(t)
e(t)
y(t)
+
-
z(t)
w(t) – wielko zadana
e(t) = w(t) – y(t) - uchyb regulacji
x(t) – wielko nastawiaj ca
y(t) – wielko regulowana
z(t) – zakłócenia
Zadaniem regulatora jest:
• mo liwie wierne odtwarzanie wielko ci zadanej na
wyj ciu obiektu,
• mo liwie jak najbardziej skuteczne
przeciwdziałanie wpływowi sygnału zakłócenia na
wielko regulowan (wyj ciow obiektu).
Stabilizacja procesu
regulacja
Uzyskiwanie zadanych przebiegów:
sterowania logicznego,
sterowania programowego w czasie.
Główny obszar
zastosowania
Problemy dynamiczne w
zamkni tym obwodzie
działania
Du e nakłady na strategi sterowania,
wra liwo na zmiany procesu
Szczególne
problemy
Wzgl dnie proste i odporne
strategie sterowania, działanie
na zbiorcze wielko ci
zakłócaj ce
Szybkie działanie na zmierzone
zakłócenia, zanim wpłyn one na
wielko sterowan
Szczególne zalety
Zapewnienie odporno ci bez
wi kszych trudno ci
Wra liwo na zmiany w przebiegu
procesu
Odporno strategii
sterowania
Zgrubna znajomo
statycznego i dynamicznego
przebiegu procesu
Dokładna znajomo przebiegu
wielko ci zadanej oraz statycznego i
dynamicznego przebiegu procesu
Warunki dla
okre lenia strategii
sterowania
Mierzalna wielko
regulowana
Okre lona strategia sterowania,
wielko zakłócaj ca mierzalna
Warunki
zastosowania
zmianach wielko ci
regulowanej
zapami tanym w sterowniku przebiegu
wielko ci zadanej i zmianach
spowodowanych zakłóceniami
Podstawowa
zasada:
działanie steruj ce
opiera si na
Sterowanie w układzie
zamkni tym
Sterowanie w układzie otwartym
Cecha
Porównanie otwartego i zamkni tego układu sterowania
24
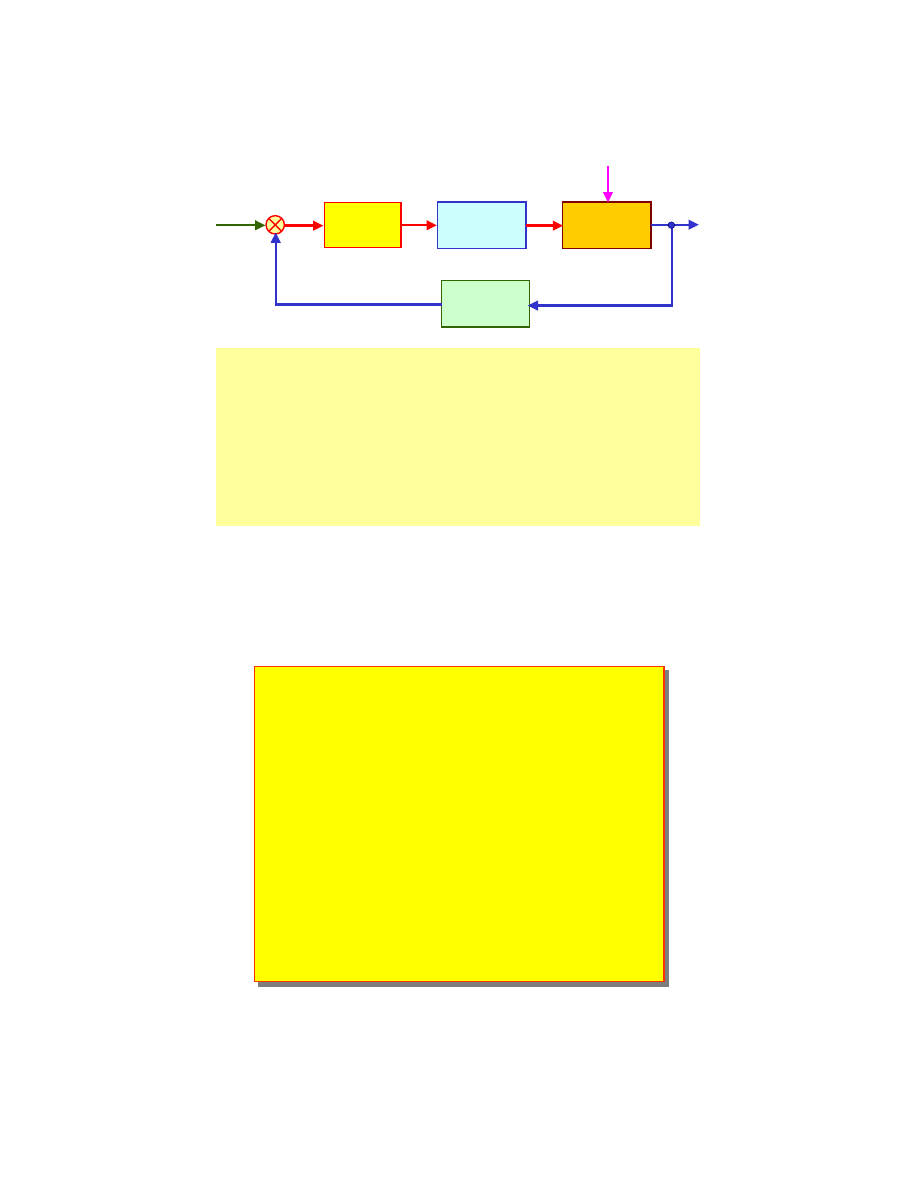
Układ regulacji
Regulator
Regulator jest urz dzeniem, którego zadaniem jest:
– porównanie zmierzonej wielko ci regulowanej
y
m
z wielko ci zadan
w
i okre lenie wielko ci uchybu (bł du) regulacji
e = w - y
m
,
– w zale no ci od odchyłki regulacji, czasu jej trwania oraz szybko ci
zmian wytworzenie sygnału wyj ciowego zwanego sygnałem
steruj cym x o takiej warto ci, aby bł d regulacji miał dostatecznie
mał warto ,
– takie kształtowanie własno ci dynamicznych układu regulacji, aby
układ był stabilny oraz zapewniał wymagan jako regulacji.
Regulator
Urz dzenia
wykonawcze
Obiekt
regulacji
Urz dzenie
pomiarowe
w
w
e
e
x
x
x
x
w
w
y
y
z
z
y
y
y
y
m
m
-
-
+
+
Wymagania dotycz ce układów regulacji
Odporno
Odporno
Dokładno
Dokładno
Szybko
Szybko
Stabilno
Stabilno
25
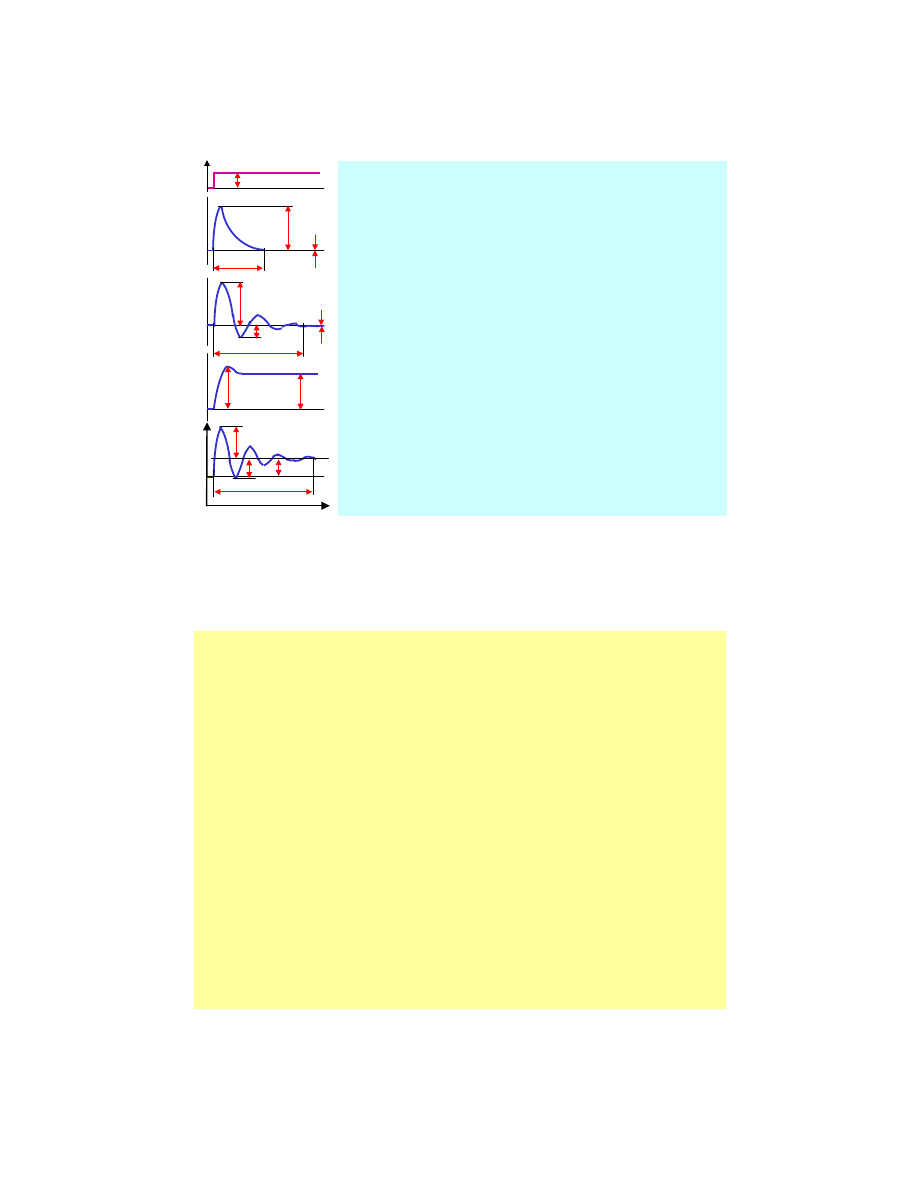
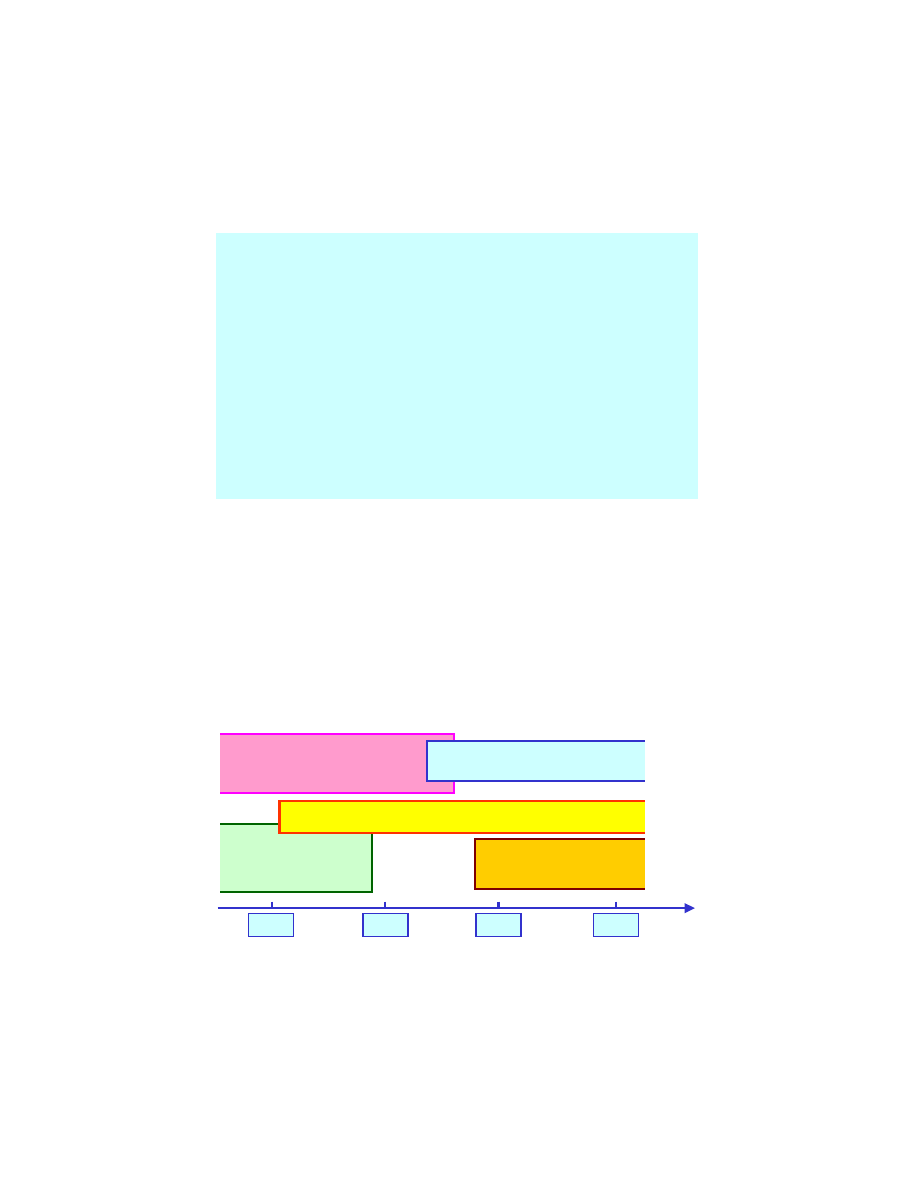
Wska niki jako ci regulacji wynikaj ce z charakterystyki
czasowej
Najprostszy sposób oceny przebiegu regulacji opiera si na analizie
wybranych wska ników charakterystyki czasowej zamkni tego układu
regulacji. W układach regulacji stabilizacyjnej ocenia si
charakterystyk uchybu (odchyłki) regulacji e(t) otrzyman dla
skokowej zmiany zakłócenia z(t) = 1(t), a w układach regulacji
nad nej ocenia si charakterystyk odchyłki regulacji e(t) otrzyman
dla liniowej zmiany warto ci zadanej w(t) = 1(t) t.
Charakterystyk czasow zamkni tego układu regulacji charakteryzuj
nast puj ce wska niki:
- maksymalna odchyłka regulacji e
max
,
- odchyłka statyczna e
stat
,
- czas regulacji t
R
,
- przeregulowanie
κκκκ
= 100 e
2
/e
1
[%].
Odchyłka maksymalna e
max
decyduje o bezpiecze stwie obiektu
regulacji. I tak np. maksymalna temperatura, ci nienie, pr dko
obrotowa nie mo e przekroczy warto ci dopuszczalnej.
Czas regulacji t
R
okre la czas trwania procesu przej ciowego liczony
od chwili wprowadzenia zakłócenia do osi gni cia stabilizacji wielko ci
regulowanej w granicach przyj tej tolerancji. Przeregulowanie
κκκκ
zdefiniowane jako iloraz s siednich amplitud oscylacyjnego przebiegu
regulacji jest miar szybko ci tłumienia oscylacji wielko ci regulowanej.
Odchyłka statyczna e
stat
okre la warto odchyłki regulacji w stanie
ustalonym osi gni tym po czasie t
R
.
z(t) = 1(t)
e
max
e
stat
= 0
w = 0
t
R
e
stat
= 0
e
max
= e
1
e
2
t
R
e
max
e
stat
t
R
e
2
e
stat
t
e
1
e
Własno ci układów regulacji i regulatory
Od układów regulacji wymaga si mo liwie dokładnego utrzymywania wielko ci
regulowanej na zadanym poziomie. Dlatego te układ regulacji powinien si
odznacza mo liwie mał warto ci uchybu w stanie ustalonym (po zaniku
procesu przej ciowego). Ponadto istotny jest tak e czas regulacji, tzn. czas w
którym wielko regulowana po wyst pieniu zakłócenia osi ga poziom
wielko ci zadanej. W ocenie jako ci regulacji i doborze nastaw regulatorów
stosowane s tak e kryteria całkowe, takie jak np. minimalizacja warto ci
wska ników:
IAE = |e(t)| dt ISE = e
2
(t) dt ITAE = |e(t)| t dt
W układach regulacji mog si tak e pojawia drgania (oscylacje). Dlatego te
istotnym wymaganiem jest zapewnienie stabilno ci układów regulacji.
Zadanie regulatora polega na wygenerowaniu odpowiedniego sygnału
steruj cego, aby obiekt regulowany w jak najkrótszym czasie osi gał warto
zadan . W zale no ci od typu obiektu i wymaga stawianych układom
regulacji stosowane s ró ne
rodzaje regulatorów
rodzaje regulatorów, takie jak:
proporcjonalne P,
proporcjonalno-całkuj ce PI,
proporcjonalno – ró niczkuj ce PD,
proporcjonalno-całkuj co-ró niczkuj ce PID.
0
t
0
t
t
0
26
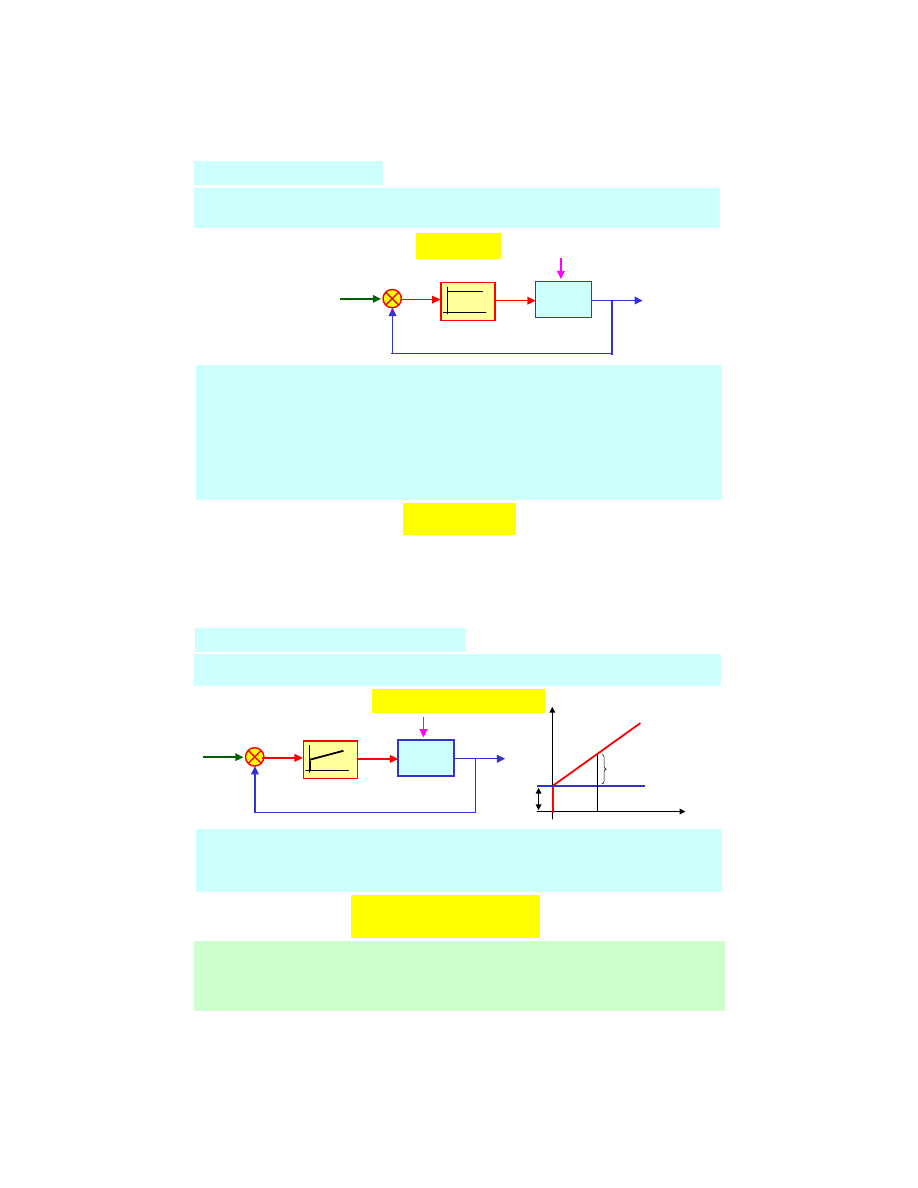
Rodzaje regulatorów - P
Regulator proporcjonalny P
Regulator proporcjonalny P
Regulator proporcjonalny P składa si z jednego członu P (proporcjonalnego),
którego transmitancj G
R
(s) okre la wzmocnienie K
P
.
G
R
(s) = K
P
Regulator P prowadzi do układów regulacji statycznej. Nadaje si on do
zastosowania dla obiektów prostych o redniej wielko ci inercji, niedu ym
opó nieniu i stałym obci eniu. Cz sto stanowi regulator pomocniczy.
Układy regulacji z regulatorem typu P odznaczaj si tym, e mo e w nich
wyst powa uchyb statyczny o małej warto ci, który nie jest eliminowany ze
wzgl du na nieczuło wyst puj c w układzie.
Sygnał wyj ciowy z regulatora P wynosi:
Obiekt
x(t)
w(t)
e(t)
y(t)
+
-
z(t)
G
R
(s) = K
P
x(t) = K
P
e(t)
Regulator
x(t) = K
p
[
e(t) + --- e(
ττττ
) d
ττττ
]
0
ττττ
1
T
i
Rodzaje regulatorów - PI
Regulator proporcjonalno
Regulator proporcjonalno
-
-
całkuj cy PI
całkuj cy PI
Regulator proporcjonalno-całkuj cy PI składa si z członu P (proporcjonalnego) oraz członu
całkuj cego I, którego transmitancj G
R
(s) okre la wzmocnienie K
P
oraz czas zdwojenia T
i
.
G
R
(s) = K
P
(1+ 1/ T
i
s)
Układy regulacji z regulatorem typu P odznaczaj si tym, e uchyb statyczny jest
eliminowany na skutek działania całkuj cego regulatora. W tym typie regulatora sygnał
wyj ciowy jest sum składowej proporcjonalnej do sygnału wej ciowego regulatora i
składowej proporcjonalnej do całki tego sygnału:
Obiekt
x(t)
w(t)
e(t)
y(t)
+
-
z(t)
G
R
(s) = K
P
(1 + 1/T
i
s)
Regulator
x(t)
K
P
K
P
Odpowied członu
I
I
Odpowied członu
P
P
t
T
i
Regulator PI jest w stanie sprowadzi uchyb regulacji do zera (regulacja astatyczna). Zapewnia on dobr
regulacj zasadniczo przy zakłóceniach stosunkowo powolnych, o małych cz stotliwo ciach. Im jest
nastawione wi ksze wzmocnienie K
P
, oraz krótszy czas całkowania
T
i
, tym szybciej działa regulator lecz
jednocze nie bli szy jest granicy niestabilno ci. Stosuje si go do obiektów o dowolnej inercji nawet z
wi kszymi opó nieniami i znaczniejszymi, ale powolnymi zmianami obci enia.
27
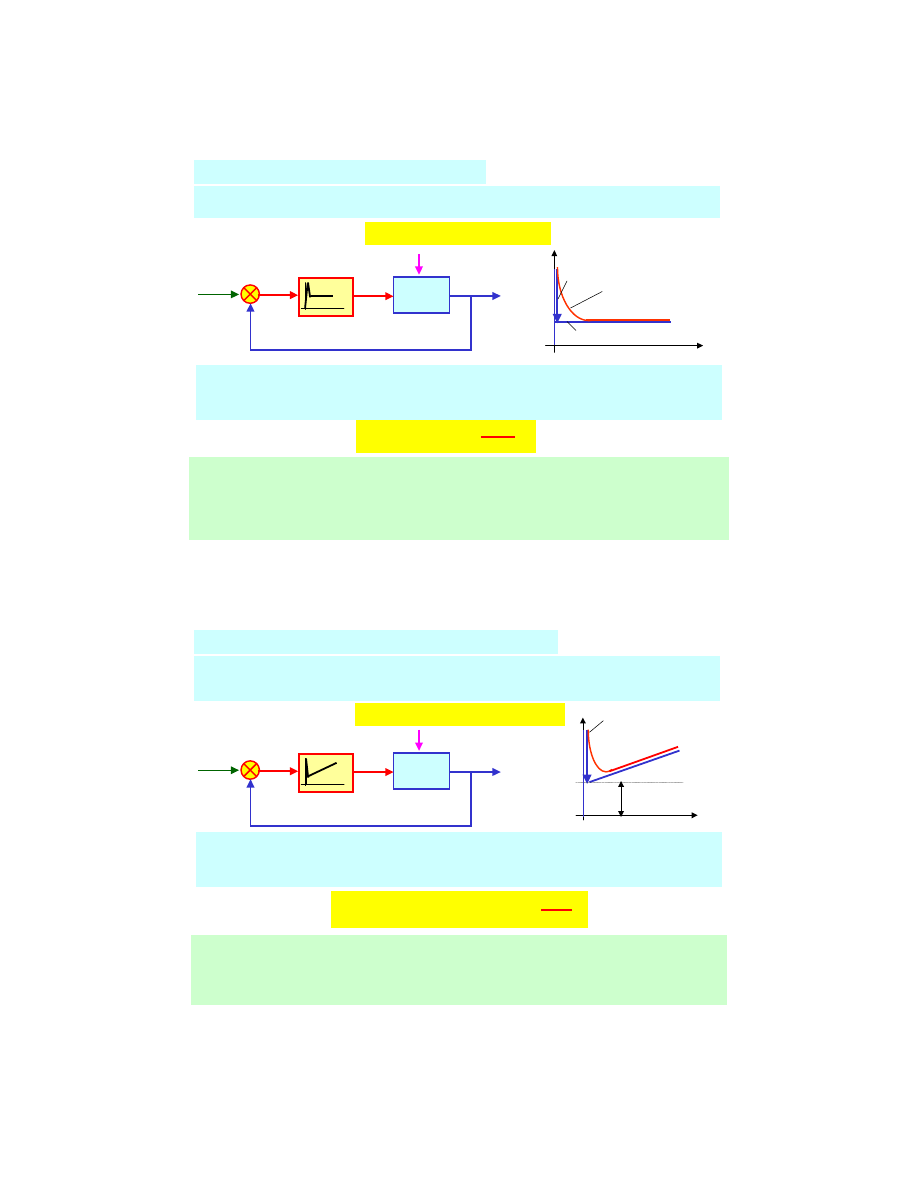
Rodzaje regulatorów - PD
Regulator proporcjonalno
Regulator proporcjonalno
-
-
ró niczkuj cy PD
ró niczkuj cy PD
Regulator proporcjonalno-ró niczkuj cy PD składa si z członu P (proporcjonalnego) oraz członu
ró niczkuj cego D, którego transmitancj G
R
(s) okre laj wzmocnienie K
P
oraz czas wyprzedzenia T
D
.
G
R
(s) = K
P
(1 + T
D
s)
Układy regulacji z regulatorem typu P odznaczaj si tym, e wyst puje szybka reakcja na dynamiczne
zmiany zakłóce i eliminowany jest uchyb statyczny e
stat
. W tym typie regulatora sygnał wyj ciowy jest
sum składowej proporcjonalnej do sygnału wej ciowego regulatora i składowej proporcjonalnej do
ró niczki tego sygnału:
de(t)
dt
x(t) = K
P
[
e(t) + K
D
]
Obiekt
x(t)
w(t)
e(t)
y(t)
+
-
z(t)
G
R
(s) = K
P
(1 + K
D
s)
Regulator
Regulator PD zapewnia dobr regulacj w zakresie szerszego pasma cz stotliwo ci zakłóce ni regulator
PI, ale nie jest w stanie sprowadzi do zera uchybu regulacji (regulacja statyczna). Człon ró niczkuj cy D
powoduje szybk reakcj regulatora w chwili pojawienia si zakłócenia. Podobnie jak regulator P,
regulator PD stosuje si jako regulator pomocniczy w zło onych układach regulacji.
Uwaga: Człon D, o
działaniu wył cznie ró niczkuj cym, nie mo e by wykorzystany jako samodzielny regulator, gdy nie ma
mo liwo ci oddziaływania na obiekt w stanie ustalonym.
x(t)
t
Odpowied członu P
Odpowied członu D
Odpowied
rzeczywistego
regulatora PD
Rodzaje regulatorów - PID
Regulator proporcjonalno
Regulator proporcjonalno
-
-
całkuj co
całkuj co
-
-
ró niczkuj cy PID
ró niczkuj cy PID
Regulator proporcjonalno-ró niczkuj cy PD składa si z członu P (proporcjonalnego), członu
całkuj cego I członu ró niczkuj cego D, którego transmitancj G
R
(s) okre laj wzmocnienie K
P
oraz
parametry T
i
i T
D
.
G
R
(s) = K
P
(1 + 1/T
i
s + T
D
s)
Układy regulacji z regulatorem typu P odznaczaj si tym, e wyst puje szybka reakcja na dynamiczne
zmiany zakłóce , a mo e wyst powa uchyb statyczny e
stat
. W tym typie regulatora sygnał wyj ciowy
jest sum składowej proporcjonalnej do sygnału wej ciowego regulatora i składowej proporcjonalnej
do ró niczki tego sygnału:
de(t)
dt
x(t) = K
p
[
e(t) + ----
e(
ττττ
) d
ττττ
+ T
D
]
0
ττττ
T
i
1
Obiekt
x(t)
w(t)
e(t)
y(t)
+
-
z(t)
G
R
(s) = K
P
(1 + 1/T
i
s + T
D
s)
Regulator
Regulator PID stosuje si do obiektów poddanych wpływom zakłóce o du ych i gwałtownych zmianach.
Ł czy on w sobie zalety regulatorów PI i PD. Umo liwia stosowanie krótszych czasów zdwojenia
T
i
ni
regulator PI bez obawy powstania oscylacji w układzie zamkni tym, a wi c pr dzej likwiduje wpływ
zakłóce o warto ciach ustalonych. Dla obiektów o du ych opó nieniach (np. dla obiektów inercyjnych
wysokiego rz du) skuteczno działania regulatorów PI oraz PID s praktycznie takie same.
x(t)
t
K
P
e
Odpowied
rzeczywistego
regulatora PD
28
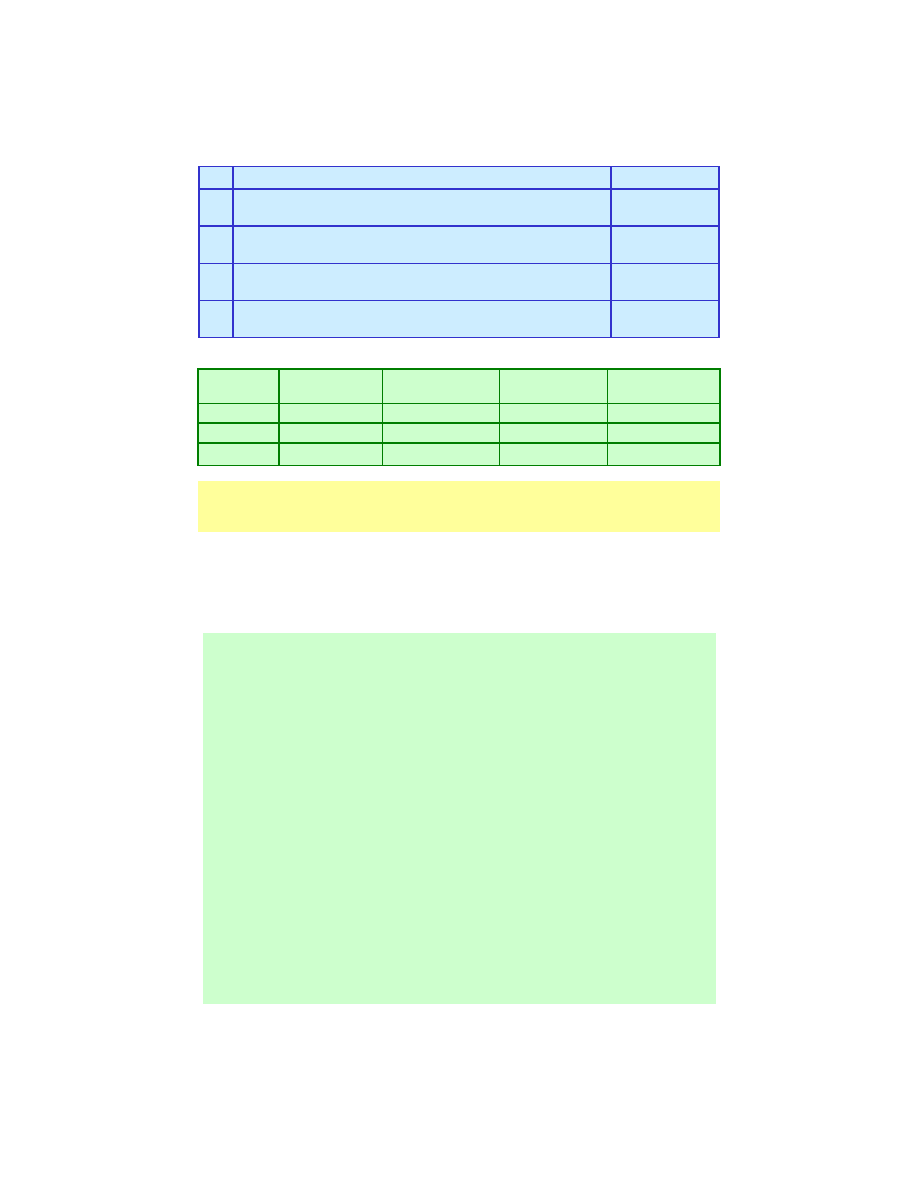
Dobór regulatora
Regulator
PID
PID
K
P
, T
i
, T
D
Usuni cie bł du statycznego odpowiedzi na skokowy sygnał
steruj cy lub zakłócaj cy, skrócenie czasu regulacji
4
Regulator
PD
PD
K
P
, T
D
Zmniejszenie bł du statycznego odpowiedzi na skokowy sygnał
steruj cy lub zakłócaj cy, skrócenie czasu regulacji
3
Regulator
PI
PI
K
P
, T
i
Usuni cie bł du statycznego odpowiedzi na skokowy sygnał
steruj cy lub zakłócaj cy, wydłu enie czasu regulacji
2
Regulator
P
P
K
P
Zmniejszenie bł du statycznego odpowiedzi na skokowy sygnał
steruj cy lub zakłócaj cy
1
Typ regulatora
Przewidywany skutek działania układu regulacji
L.p.
Mała zmiana
Zmniejszenie
Zmniejszenie
Mała zmiana
Składowa
D
D
Eliminacja
Zwi kszenie
Zwi kszenie
Zmniejszenie
Składowa
I
I
Zmniejszenie
Mała zmiana
Zwi kszenie
Zmniejszenie
Składowa
P
P
Uchyb w stanie
ustalonym
Czas ustalania
Przeregulowanie
Czas narastania
Wpływ poszczególnych składników regulatora na przebieg regulacji
Regulator PI zapewnia dobr jako regulacji tylko przy zakłóceniach o małych
cz stotliwo ciach. Natomiast regulator PD zapewnia szersze pasmo regulacji ni
regulator PI, ale z gorsz jako ci regulacji przy małych cz stotliwo ciach.
Realizacje techniczne regulatorów
W zale no ci od sposobu realizacji regulator mo e mie posta
podzespo
podzespo
ł
ł
u elektronicznego zbudowanego z zastosowaniem
u elektronicznego zbudowanego z zastosowaniem
wzmacniaczy operacyjnych lub te
wzmacniaczy operacyjnych lub te
stanowi
stanowi
procedur
procedur
w programie
w programie
steruj
steruj
cym mikrokontrolera
cym mikrokontrolera
(
(
mikrosterownika
mikrosterownika
)
). W ka dym z tych
przypadków regulator jest wyodr bniony jako blok funkcjonalny, opisany
transmitancj i charakteryzuj cy si odpowiednio dobranymi
nastawami
nastawami.
Regulatory ci
Regulatory ci
g
g
ł
ł
e
e (analogowe) s stosowane w coraz mniejszym
zakresie, jednak w przypadku przekształtników pracuj cych z du
cz stotliwo ci ł cze nie mog by one zast pione przez regulatory
dyskretne (cyfrowe)
dyskretne (cyfrowe).
Specjalna grupa regulatorów powszechnie stosowanych w urz dzeniach
energoelektronicznych to
regulatory nieliniowe typu dwustanowego
regulatory nieliniowe typu dwustanowego.
Nowoczesne metody sterowania umo liwiaj wprowadzenie do układów
sterowania bloków charakteryzuj cych si zdolno ciami podobnymi do
rozumu ludzkiego. S to
regulator
regulator
y
y
z elementami sztucznej inteligencji.
z elementami sztucznej inteligencji.
Dwie z metod sztucznej inteligencji znalaz
ł
y w ostatnich czasach
szczególne zastosowanie –
sieci neuronowe i uk
sieci neuronowe i uk
ł
ł
ady logiki rozmytej
ady logiki rozmytej.
Główn zalet tych regulatorów jest niewielka wra liwo
na zmiany
parametrów uk
ł
adów i odporno
na zakłócenia.
29
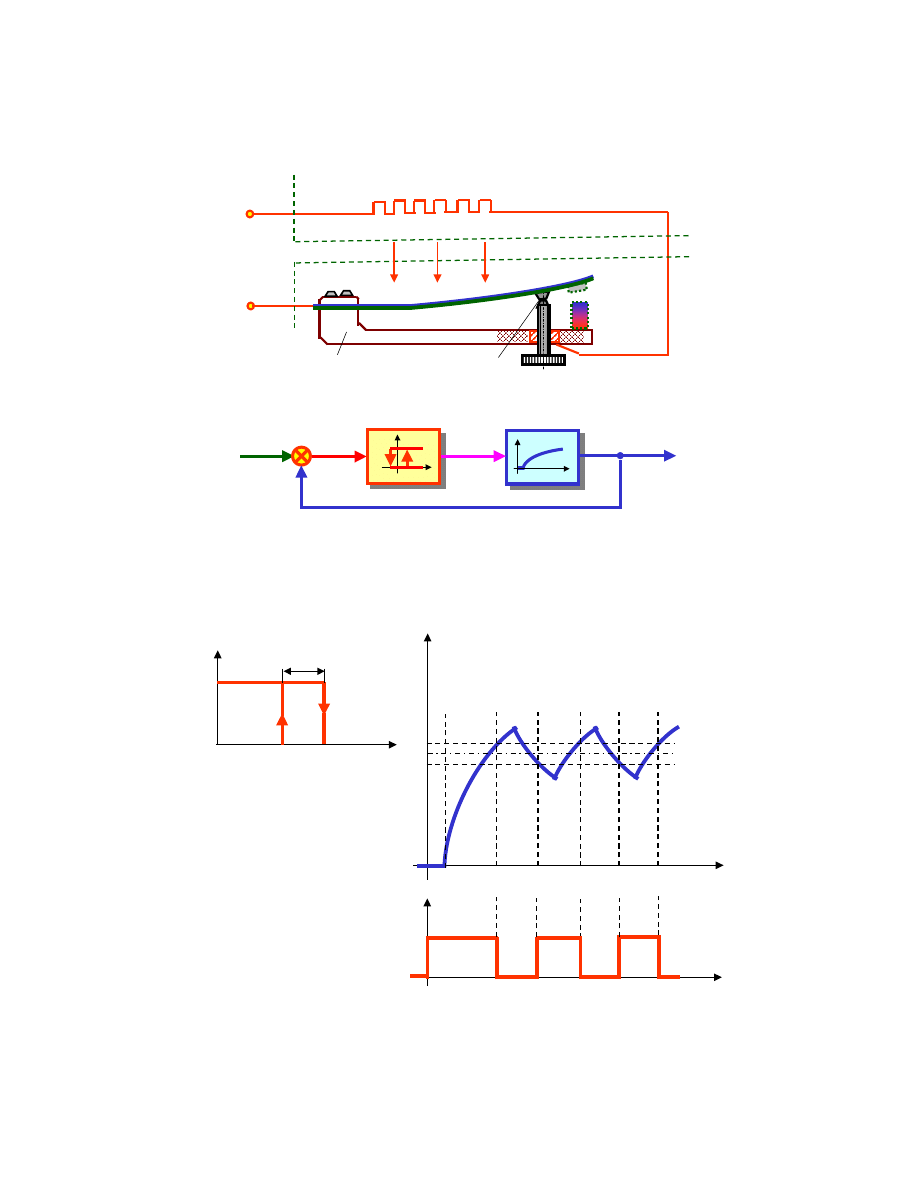
Regulacja dwustanowa
N
S
Grzałka
Strumie ciepła
Pasek bimetaliczny
Materiał izolacyjny
Styk
U
U
w(t)
e(t)
x(t)
y(t)
-
+
Przebieg regulacji dwustanowej
Zale no napi cia zasilania grzałki U
od temperatury
θθθθ
w układzie regulacji
dwustanowej
Wył czenie zasilania nast puje przy
temperaturze czujnika równej
temperaturze zadanej
θθθθ
z
, natomiast
wł czenie zasilania nast pi przy
temperaturze wł czenia
θθθθ
w
.
Wielko h nazywa si stref histerezy
regulatora, h =
θθθθ
z
-
θθθθ
w
.
θθθθ
w
θθθθ
z
θθθθ
0
U
h
t
y
t
x
30
Układy logiczne dzieli si na układy kombinacyjne i sekwencyjne.
Układy
logiczne kombinacyjne
logiczne kombinacyjne to takie układy, w których stan wyj zale y tylko od
aktualnego stanu sygnałów na wej ciach.
Natomiast w układach
logicznych sekwencyjnych
logicznych sekwencyjnych sygnały wyj ciowe zale nie tylko od
stanu sygnałów na wej ciach, lecz tak e od stanów wewn trznych układu, tzn. jego
„historii”.
Najprostszymi układami logicznymi kombinacyjnymi s bramki logiczne, tzw. funktory.
Natomiast podstawowymi układami logicznymi sekwencyjnymi s przerzutniki. W opisie
układów logicznych korzysta si z algebry logiki, zwanej te algebr Boole’a. W algebrze
logiki dowolne zmienne (sygnały) mog przyjmowa tylko dwa stany: „tak” lub „nie” maj ce
warto ci: „1” lub „0”, czyli s to sygnały binarne (dwustanowe). Funkcj jednej lub wielu
zmiennych binarnych nazywa si funkcj przeł czaj c . Trzy podstawowe funkcje
przeł czaj ce w algebrze Boole’a to: przeczenie (negacja)
NIE
NIE (NOT), iloczyn logiczny
(koniunkcja)
I
I (AND) oraz suma logiczna (alternatywa)
LUB
LUB (OR). Wła ciwo ci funkcji
logicznych s zdefiniowane za pomoc tablicy stanów (prawdy).
Układy logiczne (przeł czaj ce)
1.
a – negacja („
NIE
NIE” –
NOT
NOT)
2.
b a – iloczyn logiczny („
I
I” –
AND
AND)
3.
b a – iloczyn logiczny zanegowany („
NIE I
NIE I” –
NAND
NAND)
4.
b + a – suma logiczna („
LUB
LUB” -
OR
OR)
5.
b + a – suma logiczna zanegowana („
NIE LUB
NIE LUB” –
NOR
NOR)
6.
a b – suma logiczna wykluczaj ca („
ALBO
ALBO” –
EXOR
EXOR).
+
*
*
Wej cia
Wyj cia
Symbole bramek logicznych
NOT
NOT
AND
AND
NAND
NAND
OR
OR
NOR
NOR
XOR
XOR
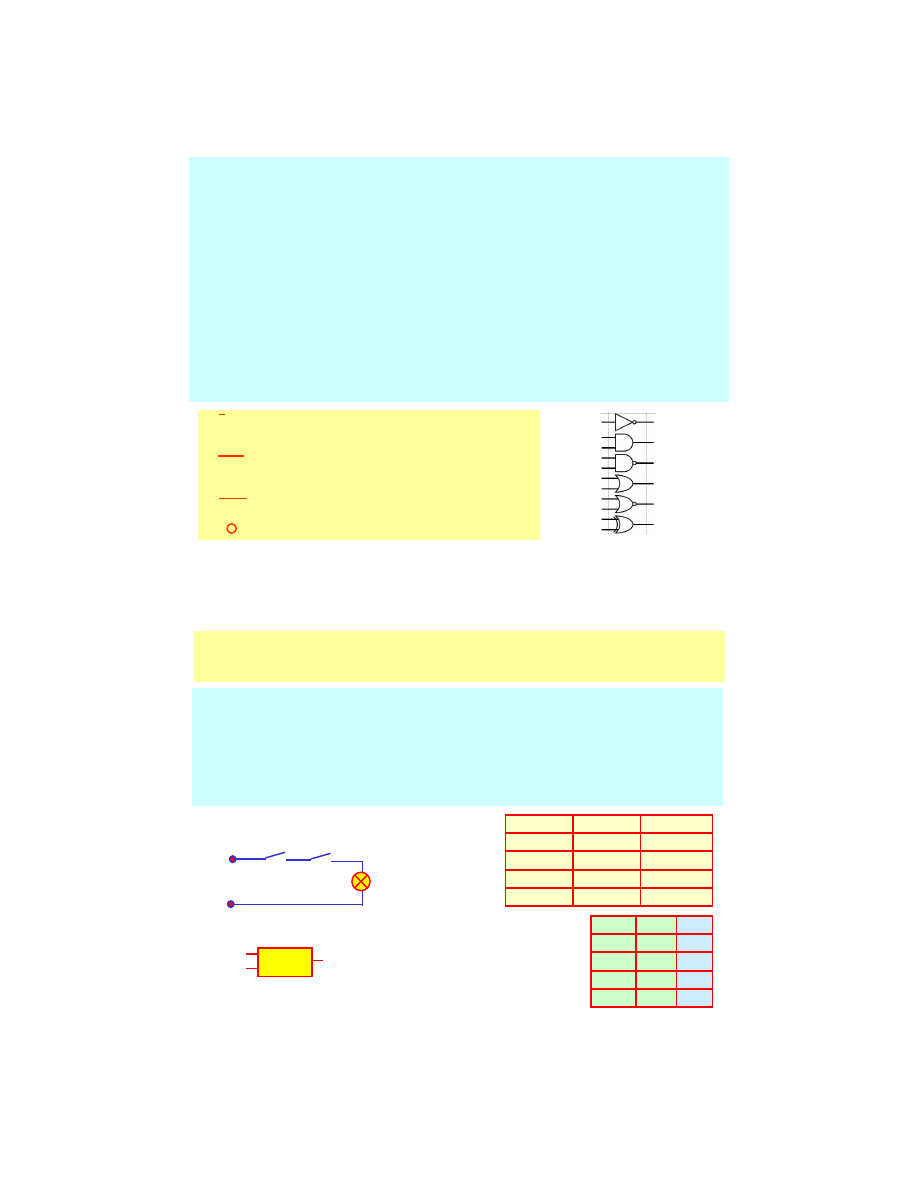
Działania logiczne - mno enie
Istnieje trzy podstawowe działania logiczne: I (AND), LUB (OR) i NIE (N..). Działania
zło one, które s najcz ciej stosowane w praktyce, s oparte na tych trzech działaniach
podstawowych. Podstaw matematyczn działa logicznych tworzy algebra Boole’a.
Działanie logiczne I (AND)
Działanie logiczne I (AND)
-
-
mno enie
mno enie
Przykład: Lampka powinna si wieci tylko wtedy, gdy s zamkni te oba styki S1 i S2.
Zadanie to mo na rozwi za przez kolejne zamkni cie obu styków. Tabela stanów zawiera
wszystkie mo liwe stany styków i wynikaj cy z nich stan lampki. Tabele takie nazywaj si
tabelami stanu lub tabelami warto ci. Na rysunku pokazano tak e znormalizowany symbol
ogólnego działania I z dwoma wej ciami. Oczywi cie mo liwe s tak e działania I (AND) z
wi ksz liczb wej .
S1
S1
S1
S1
Lampka
L
L
+
+
-
-
Elektryczna realizacja działania
I
I
Zał czona
Zamkni ty
Zamkni ty
Wył czona
Otwarty
Zamkni ty
Wył czona
Zamkni ty
Otwarty
Wył czona
Otwarty
Otwarty
Lampka L
Lampka L
S2
S2
S1
S1
1
1
1
0
0
1
0
1
0
0
0
0
L
L
S2
S2
S1
S1
&
&
S1
S1
S2
S2
L
L
Symbol działania
I
I
Tabela
stanów
Tabela
warto ci
31
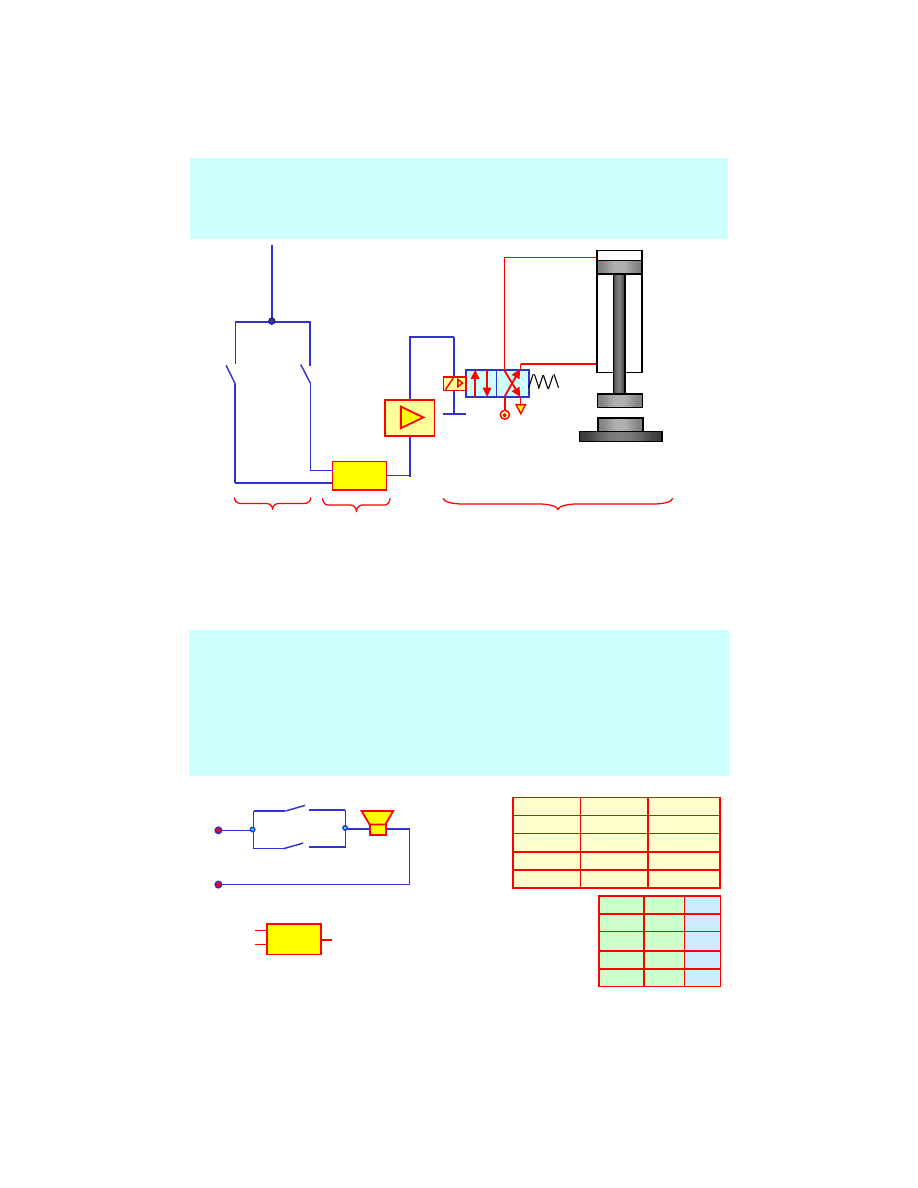
Przykład zastosowania logicznego mno enia
Sterowanie pras
Sterowanie pras
–
–
działanie i (AND)
działanie i (AND)
Ze wzgl dów bezpiecze stwa prasa mo e by tylko wtedy uruchomiona, je eli
operator równocze nie wci nie dwa przyciski (S1 i S2) na pulpicie – obsługa
dwur czna.
&
&
S1
S1
S2
S2
Bramka
I
I
+U
+U
Wzmacniacz
Siłownik
Zawór drogowy
(elektromagnetyczny)
Stempel
Urz dzenia wykonawcze (aktuatory)
Sensory
Urz dzenia
przetwarzania
Logiczne LUB (OR)
Logiczne LUB (OR)
–
–
dodawanie
dodawanie
Działanie LUB dostarcza na wyj cie sygnał 1, je eli przynajmniej na jednym z
wej jest sygnał 1. W instalacji alarmowej powinien zosta wtedy uruchomiony
brz czyk B, gdy temperatura T1 przekroczy warto 100
o
C lub ci nienie P1
przekroczy warto 20 barów. Jako sensory zastosowane zostały dwa czujniki
graniczne (inicjatory) S1 i S2. Dzi ki równoległemu poł czeniu S1 i S2 realizowana
jest wymagana funkcja. Równie tutaj tabela stanów opisuje przebiegi zał czania.
Na rysunku pokazano tak e symbol działania LUB.
S1
S1
S1
S1
Brz czyk
B
B
+
+
-
-
Elektryczna realizacja działania
LUB
LUB
≥≥≥≥
≥≥≥≥
1
1
S1
S1
S2
S2
B
B
Symbol działania
LUB
LUB
Zał czony
Zamkni ty
Zamkni ty
Zał czony
Otwarty
Zamkni ty
Zał czony
Zamkni ty
Otwarty
Wył czony
Otwarty
Otwarty
Brz czyk B
Brz czyk B
S2
S2
S1
S1
1
1
1
1
0
1
1
1
0
0
0
0
B
B
S2
S2
S1
S1
Tabela
stanów
Tabela
warto ci
Działania logiczne - dodawanie
32
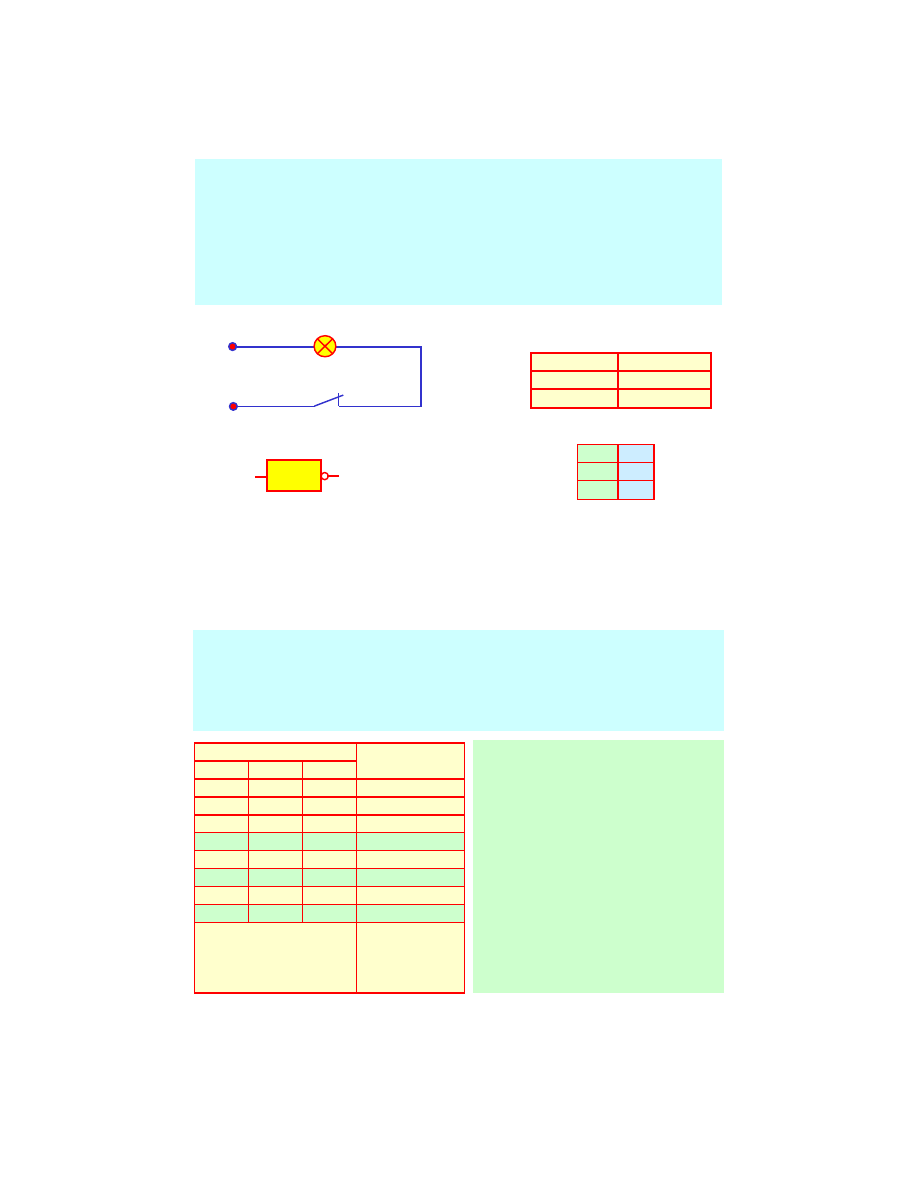
Logiczne NIE (NOT)
Logiczne NIE (NOT)
-
-
negacja
negacja
W działaniu NIE wyst puje tylko jeden sygnał wej ciowy i jeden sygnał
wyj ciowy. Sygnał wyj ciowy ma warto 1 wówczas, gdy sygnał wej ciowy ma
warto 0. Natomiast sygnał wyj ciowy ma warto 0 wówczas, gdy sygnał
wej ciowy ma warto 1. Na rysunku pokazano przykład działania
NIE
NIE, tabel
stanów i symbol. Poniewa sygnał wyj ciowy ma zawsze stan przeciwny do
stanu sygnału wej ciowego, to działanie logiczne
NIE
NIE jest okre lane tak e jako
negacja.
Przycisk S (styk
Przycisk S (styk
rozwierny
rozwierny
)
)
Lampa L
Lampa L
+
+
-
-
Elektryczna realizacja działania
NIE
NIE
Wył czona
Wci ni ty
Zał czona
Nie wci ni ty
Lampa L
Lampa L
S
S
0
1
1
0
L
L
S
S
Tabela stanów
Tabela warto ci
Symbol działania
NIE
NIE
1
1
S
S
L
L
Działania logiczne NIE - negacja
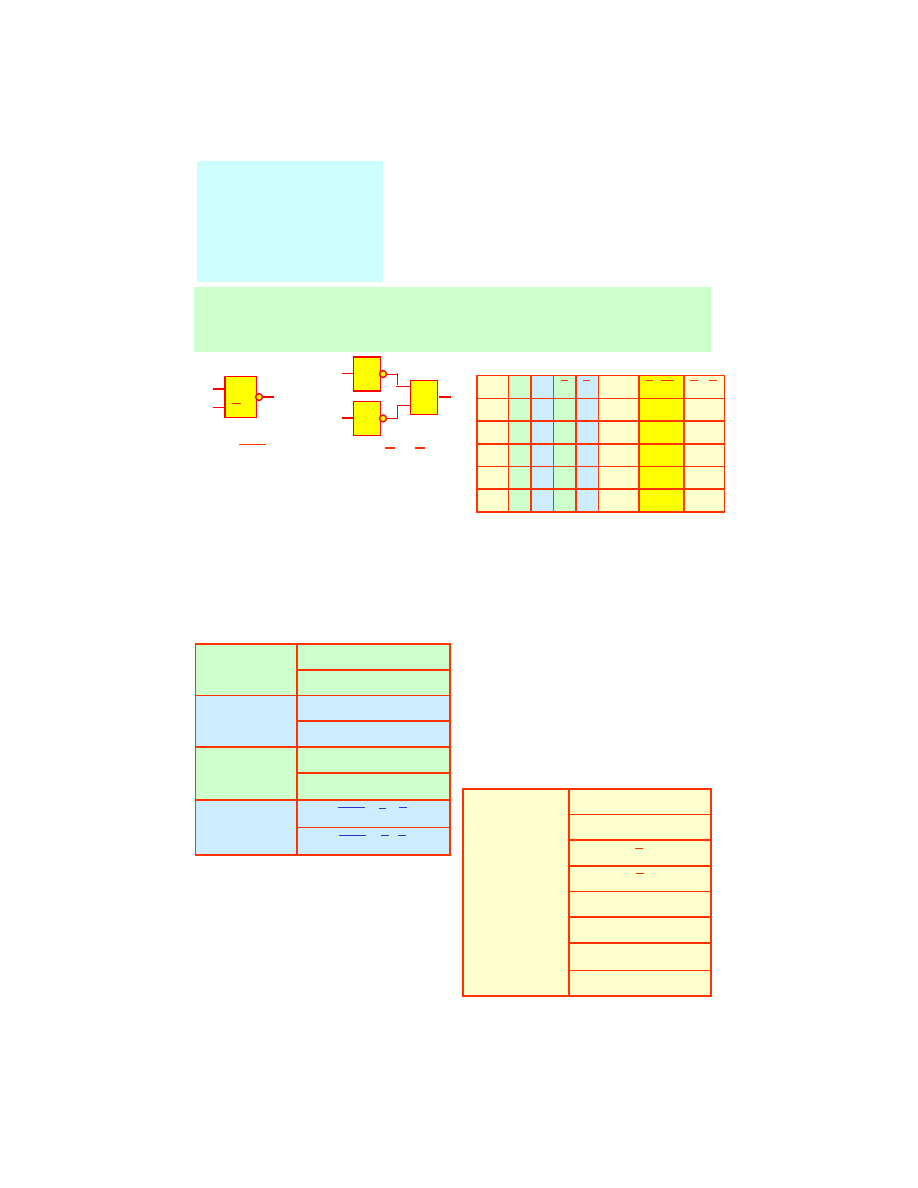
Przykład zło onego działania logicznego
Zadanie:
Zadanie:
Stanowisko do wykrawania mo e by obsługiwane z trzech stron. Siłownik pneumatyczny
powoduje wykrawanie otworu w przedmiocie. Do okre lania pozycji przedmiotów s
wykorzystywane trzy indukcyjne czujniki zbli eniowe C1, C2 i C2. Proces wykrawania jest
uruchamiany tylko wtedy, gdy dwa z tych czujników zostały pobudzone, co oznacza, e
przedmiot został poprawnie ustawiony.
1 oznacza stan
wysuni ty
siłownika
0 oznacza stan
wsuni ty siłownika
1 oznacza, e czujnik
zbli eniowy został pobudzony
0 oznacza, e czujnik
zbli eniowy nie został
pobudzony
1
1
0
0
1
1
1
1
0
1
1
1
1
1
1
1
0
0
1
1
0
0
0
1
1
1
1
1
1
1
0
0
0
0
1
0
0
0
0
0
0
0
0
0
C3
C3
C2
C2
C1
C1
Wyj cie
Siłownik
Siłownik
Wej cia (czujniki zbli eniowe)
Najpierw jest zestawiana tabela warto ci
z sygnałami wej ciowymi C1, C2 i C3 oraz
sygnałem wyj ciowym „Siłownik”. Dla
trzech sygnałów wej ciowych istnieje 8
mo liwych kombinacji bitów (0/1). W
tabeli zamieszczono wszystkie
kombinacje i na tej podstawie okre lane
s te z nich, które s zgodne ze
sformułowanym zadaniem. Zaznaczane
s te wiersze dla których w kolumnie
„Siłownik” wyst puje stan 1. Je eli taka
tabela została sporz dzona, to jest ona
nast pnie zamieniana na schemat
logiczny (nast pny slajd). Mo e by wiele
sprz towych rozwi za . Cz
przetwarzaj ca sygnały jest zbudowana
wył cznie z członów logicznych.
33
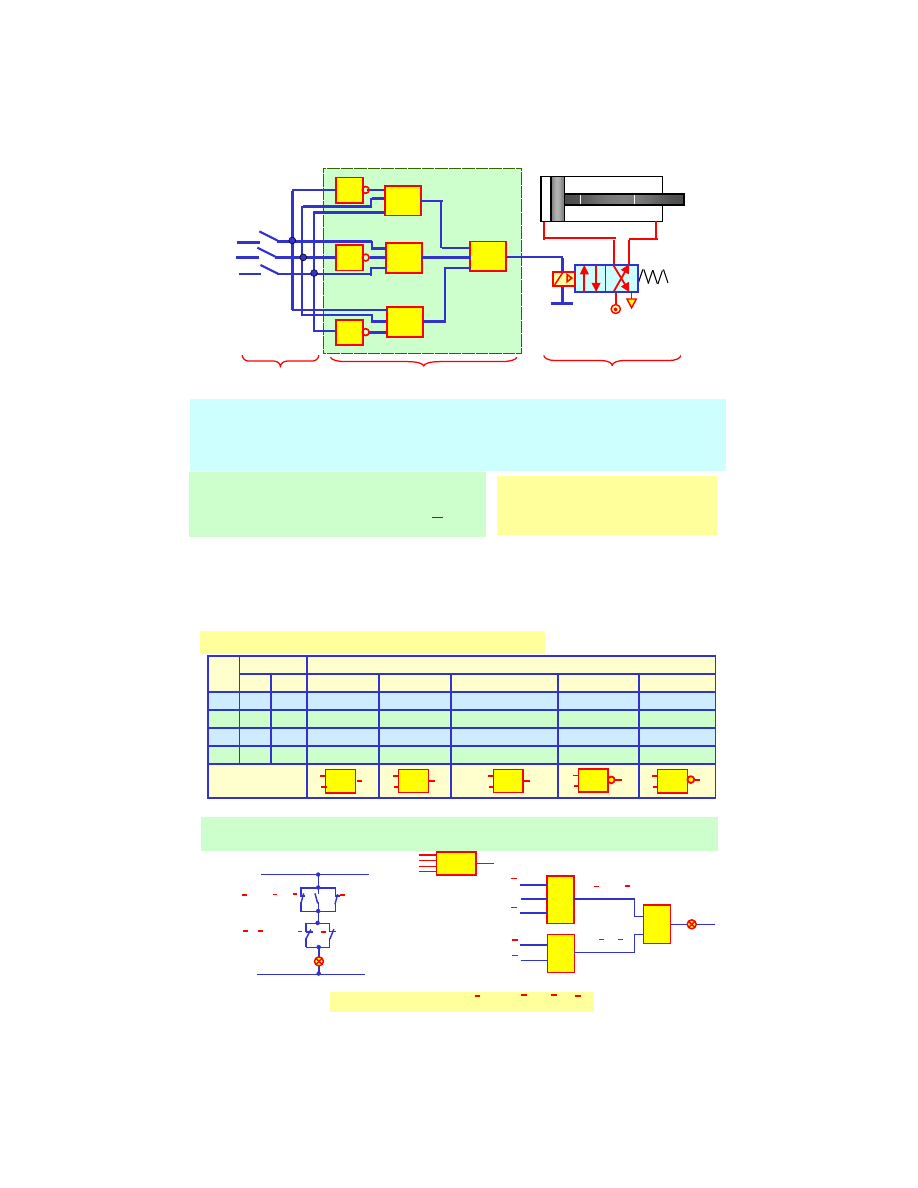
Przykład zło onego działania logicznego c.d.
&
&
I
≤≤≤≤
≤≤≤≤
1
1
LUB
&
&
I
&
&
I
1
1
1
1
C1
C1
C2
C2
C3
C3
Siłownik
Urz dzenia wykonawcze
(aktuatory)
Sensory
Urz dzenia przetwarzania
1
1
Równania Boole’a:
Działania logiczne mo na równie opisa za pomoc równa algebry Boole’a. Georg Boole
sformułował symboliczn logik , opart na zmiennych binarnych (dwustanowych).
Operatory dla podstawowych działa logicznych s nast puj ce:
Rozwi zanie zadania (poprzedni slajd)
Funkcja I (AND):
∧∧∧∧
Przykład: y = s1
∧∧∧∧
s2
Funkcja LUB (OR):
∨∨∨∨
Przykład: y = s3
∨∨∨∨
s4
Funkcja NIE:
−
Przykład: y = s1
Zatem zło ona zale no logiczna
mo e mie np. nast puj c posta :
y = C1
∧∧∧∧
C2
∨∨∨∨
C1
∧∧∧∧
C3
∨∨∨∨
C3
Algebra
Algebra
Boole’a
Boole’a
i zastosowanie działa logicznych
i zastosowanie działa logicznych
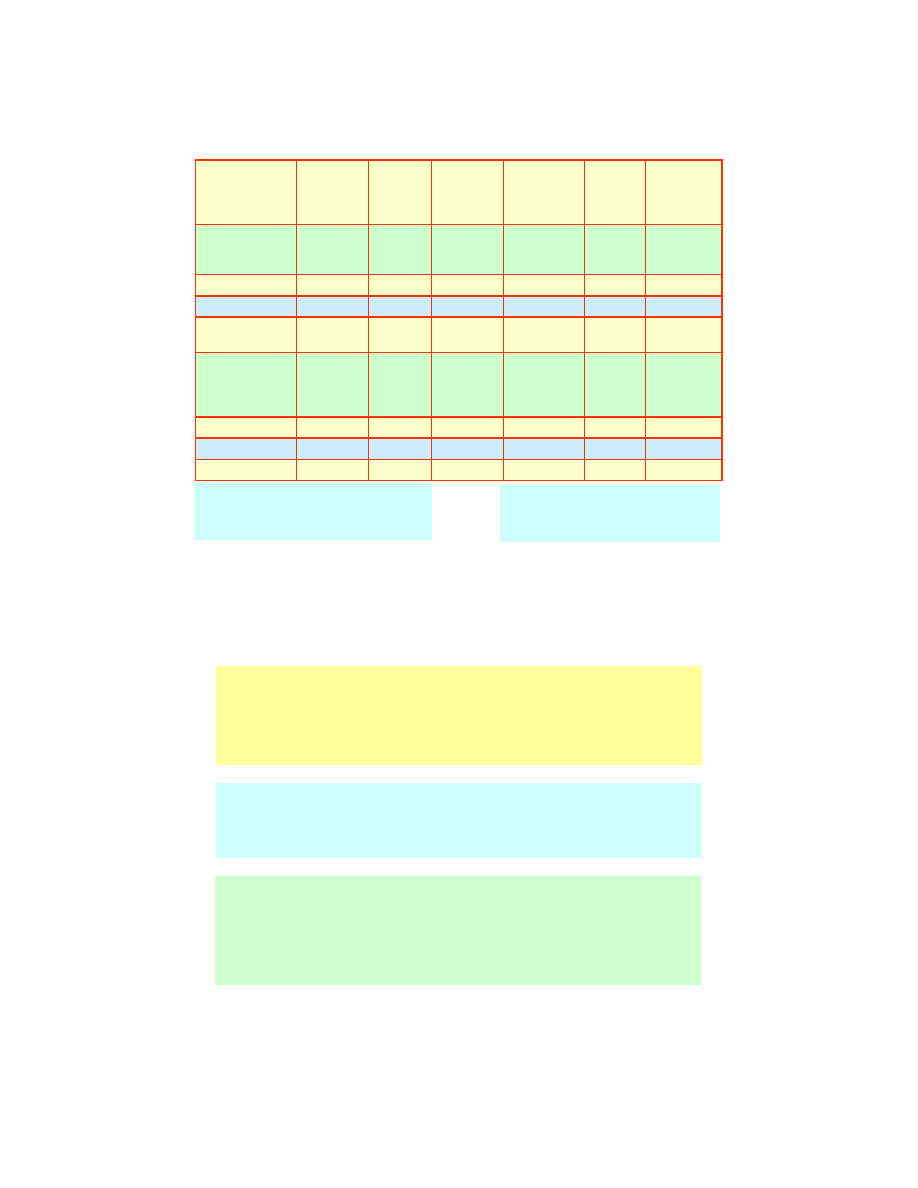
Wa niejsze działania logiczne na dwóch zmiennych
Symbol
L
L
L
H
H
H
H
4
H
L
H
H
L
L
H
3
H
L
H
H
L
H
L
2
H
H
L
L
L
L
L
1
NAND
NOR
Eksk. LUB (EXOR)
LUB (OR)
I (AND)
A
B
Wyj cie Q
Wej cia
L.p.
≥≥≥≥
≥≥≥≥
1
1
A
A
B
B
Q
Q
&
&
A
A
B
B
Q
Q
= 1
= 1
A
A
B
B
Q
Q
≥≥≥≥
≥≥≥≥
1
1
A
A
B
B
Q
Q
&
&
A
A
B
B
Q
Q
Działania logiczne mog zawiera tak e wiele wej , a ich realizacja techniczna mo e
by ró na.
&
&
L –
Low (0), H – High (1)
Obwód ze stykami
Obwód bez styków
H
H
L
L
Y = B
Y = B
∨∨∨∨
∨∨∨∨
C
C
B
A
C
B
C
X = A
X = A
∨∨∨∨
∨∨∨∨
B
B
∨∨∨∨
∨∨∨∨
C
C
Q
Równanie: Q = X
∧∧∧∧
Y = (A
∨∨∨∨
B
∨∨∨∨
C)
∧∧∧∧
(B
∨∨∨∨
C)
≥≥≥≥
≥≥≥≥
1
1
≥≥≥≥
≥≥≥≥
1
1
B
Q
A
C
B
C
Y = B
Y = B
∨∨∨∨
∨∨∨∨
C
C
X = A
X = A
∨∨∨∨
∨∨∨∨
B
B
∨∨∨∨
∨∨∨∨
C
C
&
&
34
Algebra
Algebra
Bool’a
Bool’a
Zało enia algebry
Zało enia algebry
Boole’a
Boole’a
:
:
A = H, wtedy A L
L H
L
∧∧∧∧
L = L
(AND)
H
∨∨∨∨
L = H
(OR)
Prawo De
Prawo De
Morgan’a
Morgan’a
:
:
Działanie
NOR
NOR na dwóch zmiennych mo na zast pi działaniem
I
I (AND).
Wyra nie pokazuje to tabela.
≥≥≥≥
≥≥≥≥
1
1
A
B
Q
1
1
1
1
A
B
Q
&
&
Q = A
Q = A
∨∨∨∨
∨∨∨∨
B
B
Q = A
Q = A
∧∧∧∧
∧∧∧∧
B
B
=
=
7
6
5
4
3
2
1
L
L
H
L
L
H
H
3
H
H
L
H
L
L
H
2
H
H
L
L
H
H
L
1
H
H
L
H
H
L
L
0
A
∨∨∨∨
B
C=AB
C=AB
A
B
A
B
Podstawowe prawa algebry Boole’a
a + b = a
•
b
a
•
b = a + b
Prawa de
Morgana
a + (b
•
c) = (a+b) • (a+c)
a • (b+c) = (a • b) + (a • c)
Prawa
rozdzielno ci
a + (b+c) = (a + b) + c
a • (b • c) = (a • b) • c
Prawa
ł czno ci
a + b = b + a
a • b = b • a
Prawa
przemienno ci
a + 0 = a
a
•
0 = 0
a + 1 = 1
a • 1 = a
a + a = 1
a • a = 0
a + a = a
a • a = a
Prawa
to samo ciowe
35
System czasu rzeczywistego
W systemie czasu rzeczywistego przetwarzanie
W systemie czasu rzeczywistego przetwarzanie
danych przesyłanych do lub z zewn trznego
danych przesyłanych do lub z zewn trznego
rodowiska zachodzi w deterministycznie okre lonym
rodowiska zachodzi w deterministycznie okre lonym
czasie
czasie.
Stosuje si poj cie „termin” (ang.
deadline
), oznaczaj ce
najdłu szy dopuszczalny czas reakcji systemu na
wyst pienie zdarzenia.
System czasu rzeczywistego nie musi by szybki – istotne
jest jedynie, aby jego działania spełniały narzucone
ograniczenia czasowe dla okre lonego obiektu (np.
procesu).
Ewolucja w realizacji układów sterowania
1970
1980
1990
2000
Rok
Automatyka
analogowa,
przeka niki
Systemy otwarte
Sterowniki swobodnie programowalne PLC
Centralny komputer
steruj cy
Systemy rozproszone
DCS
36
Zalety układów cyfrowych
Dokładno : Dyskretna reprezentacja i transmisja sygnału pozwala na
eliminacj szumów wprowadzanych przez urz dzenia pomiarowe.
Umo liwia transmisj sygnału na znaczne odległo ci (systemy
rozproszone)
Koszt: Technologia VLSI (bardzo du ej skali integracji) pozwala na
stosowanie zło onych metod kształtowania sygnału w ró nych punktach
toru pomiarowego przy niskich nakładach kosztów. Coraz wi ksze
znaczenie ma oprogramowanie.
Nowe algorytmy: Liniowy system ci gły mo e osi gn warto zadan
po niesko czonym czasie (przebieg asymptotyczny). Natomiast system
dyskretny mo e mie sko czony czas doj cia do warto ci zadanej.
Elastyczno : Funkcje urz dze kształtowane s programowo, a nie
sprz towo. Umo liwia to stosowanie zło onych algorytmów przetwarzania
sygnałów.
Bł dy przetwarzania: Przetwarzanie cyfrowe składa si z dwóch
podstawowych operacji: dodawania i mno enia. Bł dy s pomijalne. W
przeciwie stwie do przetwarzania analogowego wykorzystuj cego
rezystancje i pojemno ci o niepewnych parametrach
.
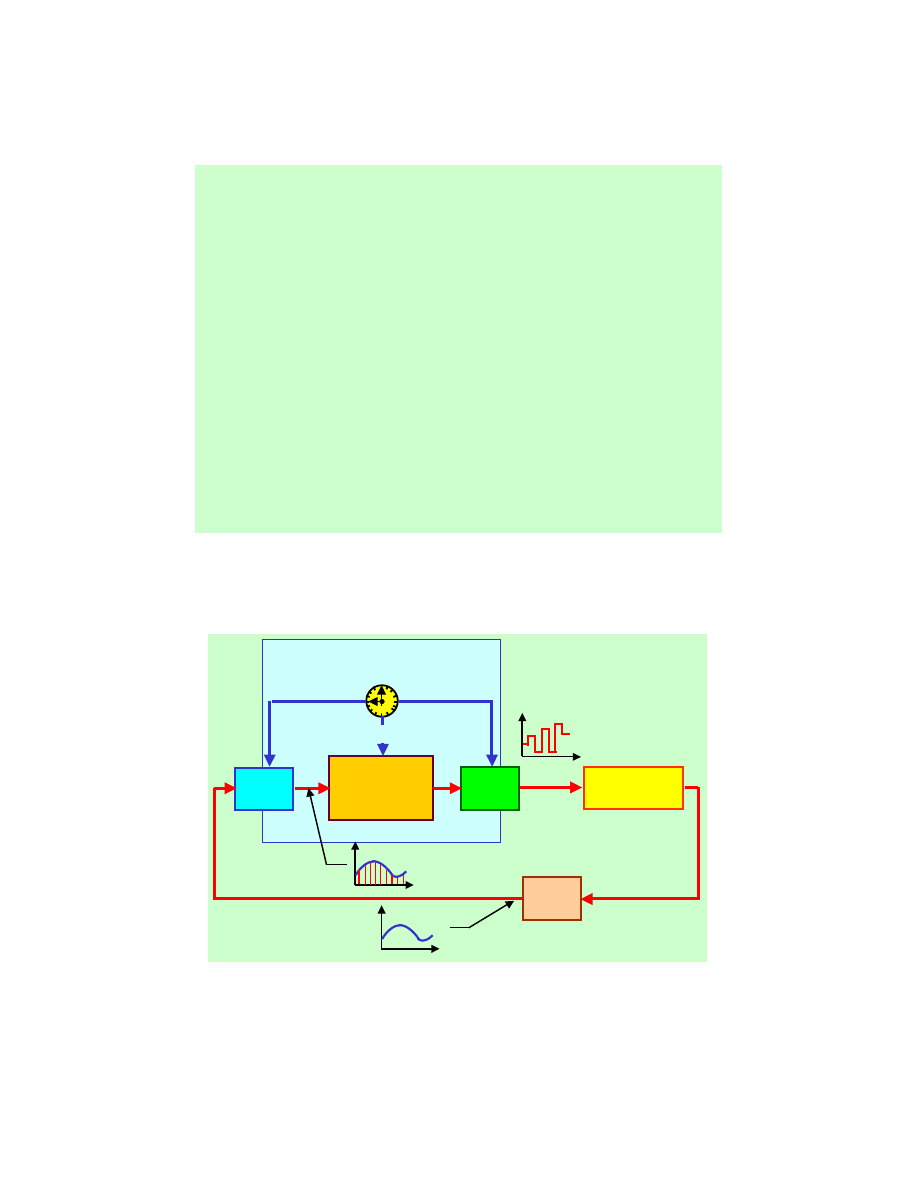
Układ sterowania cyfrowego
A/C
Algorytm
steruj cy
C/A
Proces
S
System operacyjny
czasu rzeczywistego
Zegar taktuj cy
t
Sterownik cyfrowy
t
t
A/C – przetwornik analogowo-cyfrowy
C/A – przetwornik cyfrowo-analogowy
S - sensor
37
Urz dzenia do sterowania cyfrowego
••
•••
•••
••
•••
*)
DCS
•••
••
•••
•••
•••
100
µµµµ
s
IPC
•••
•••
••
••
•••
1
µµµµ
s
Sterowniki DSP
••
••
••
••
•••
100
µµµµ
s
Przemysłowe
komputery w
standardzie
VME
•
•
•
•
•••
1 – 10
µµµµ
s
Mikro-
sterowniki
••
•
•
••
••
100 ms
FPGA
••
•••
••
••
•••
5-20 ms
PLC
•
•
•
•
•••
50-200 ms
Sterowniki
jedno- i
wielofunkcyjne
Mo liwo ci
szybkiego
prototypo-
wania
Koszt
Zło one
algorytmy
sterowania
Konfigu-
rowalno
Jako i
pewno
działania
Cykl
minimalny
Cechy
Rozwi zanie
PLC (ang.
Programmabble Logical Controller)
FPGA (ang.
Field Programmable Gate Arrays)
DSP (ang.
Digital Signal Processor)
IPC (ang.
Industrial Personal Computer)
••• - wysokie, •• - rednie, • - niskie
DCS (ang.
Dezentralised Control System)
*) – w zale no ci od rodzaju sieci
W teorii sterowania rozró nia si
dwa zasadnicze rodzaje uk
ł
adów
sterowania, a mianowicie:
sterowanie w
sterowanie w
uk
uk
ł
ł
adzie otwartym
adzie otwartym, czyli bez informacji zwrotnej o
skutkach czynno ci sterowania oraz
sterowanie w
sterowanie w
uk
uk
ł
ł
adzie zamkni
adzie zamkni
tym
tym czyli
regulacj
regulacj .
Sterowanie jest poj ciem szeroko stosowanym i dlatego te w zale no ci
od dyscypliny spotyka si ró ne jego definicje.
Sterowanie w odniesieniu do maszyn i urz
Sterowanie w odniesieniu do maszyn i urz
dze
dze
jest rozumiane jako
jest rozumiane jako
kierowanie ich prac
kierowanie ich prac
,
,
przez wp
przez wp
ł
ł
ywanie na przebieg pracy i wyst
ywanie na przebieg pracy i wyst
puj
puj
ce
ce
w
w
nich
nich
parametry w celu zrealizowania zamierzonego dzia
parametry w celu zrealizowania zamierzonego dzia
ł
ł
ania
ania.
Sterowanie mo e by :
r
r
czne
czne, kiedy człowiek (operator) bezpo rednio kieruje prac maszyny,
automatyczne
automatyczne (bez udziału człowieka).
Podstawy sterowania – definicja i klasyfikacja
38
Klasyfikacja układów sterowania
Ze wzgl du na rodzaj informacji wykorzystywanej w sterowaniu.
Układy sterowania
Układy sterowania
Zwykłe
Adaptacyjne
Rozgrywaj ce
Otwarte
Kompensacji
Stabilizacji (regulacji
stałowarto ciowej)
Zamkni te
(regulacji)
Regulacji
programowej
Sterowania
programowego
Nad ne
( ledz ce)
Pod wzgl
Pod wzgl
dem funkcjonalnym mo
dem funkcjonalnym mo
na wyr
na wyr
ó
ó
ni
ni
nast
nast
puj
puj
ce rodzaje uk
ce rodzaje uk
ł
ł
ad
ad
ó
ó
w sterowania:
w sterowania:
uk
uk
ł
ł
ady regulacji sta
ady regulacji sta
ł
ł
owarto
owarto
ciowej
ciowej
lub
stabilizuj
stabilizuj
ce
ce
, które maj za zadanie utrzymywanie warto ci
wybranych parametrów na zadanym poziomie, np. stałej pr dko ci obrotowej, stałej temperatury,
sta
ł
ego ci nienia, sta
ł
ego poziomu cieczy w zbiorniku itp.,
uk
uk
ł
ł
ady nad
ady nad
ne
ne
(
(
ledz
ledz
ce)
ce)
, które maj na celu zapewnienie zmian wielko ci regulowanej (np.
poło enia) zgodnie ze zmianami wielko ci przewodniej (steruj cej), przy czym przebieg czasowy tej
wielko ci nie jest z góry ustalony. Najwi ksz
rol
w maszynach wytwórczych odgrywaj
serwomechanizmy, czyli układy nad ne poło enia, np. układy kopiuj ce, nap dy posuwu itp.,
uk
uk
ł
ł
ady logiczne
ady logiczne
kombinatoryczne
kombinatoryczne
, w których sygnały wyj ciowe s zale ne od działa logicznych
na stanach sygnałów wej ciowych (wg algebry
Bool’a),
u
u
k
k
ł
ł
ady
ady
logiczne
logiczne
sekwencyjne
sekwencyjne
, których zadaniem jest realizacja przebiegu procesu wg okre lonej
kolejno ci (sekwencji), a istotn rol odgrywaj w nich zmiany sygnałów wej ciowych i pami ,
uk
uk
ł
ł
ady programowe
ady programowe
, w których wielko ci wyj ciowe s funkcjami czasu, drogi itp., np. regulacja
temperatury w piecu hartowniczym,
uk
uk
ł
ł
ady sterowania numerycznego
ady sterowania numerycznego
, s odmian układów programowych, w których informacje
dotycz ce przebiegu procesu wprowadzane s w postaci symbolicznej za pomoc umownych
znaków alfanumerycznych,
uk
uk
ł
ł
ady adaptacyjne
ady adaptacyjne
, s
natomiast rodzajem układów regulacji, które s stosowane dla obiektów
odznaczaj cych si
bardzo szerokim zakresem zmian własno ci, w przypadku których
konwencjonalne układy regulacji nie zapewniałyby wymaganej jako ci regulacji,
uk
uk
ł
ł
ady optymalizuj
ady optymalizuj
ce (ekstremalne)
ce (ekstremalne)
, k
tóre maj za zadanie takie sterowanie przebiegiem procesu,
aby zapewni uzyskiwanie ekstremalnej warto ci pewnej funkcji (funkcji celu), czyli tzw. wska nika
jako ci procesu.
Klasyfikacja funkcjonalna układów sterowania
39
Udział procesów ci głych i nieci głych w ró nych gał ziach
gospodarki (wg Siemens Energy & Automation)
W ca
ł
ym obszarze przemysłu, od pot nej energetyki do wyrafinowanej
mikroelektroniki, wyst puj procesy ci głe i nieci głe (dyskretne). Ka dy zakład
produkcyjny umieszczony wewn trz tego obszaru potrzebuje automatyki z obu
najwa niejszych struktur:
rozproszonych uk
rozproszonych uk
ł
ł
ad
ad
ó
ó
w sterowania DCS
w sterowania DCS (ang.
Dezentralised Control System) i
sterownik
sterownik
ó
ó
w swobodnie programowalnych PLC
w swobodnie programowalnych PLC
(ang.
Programmable Logical Controller).
Ci głe
Nieci głe
E
le
kt
ro
ni
ka
E
ne
rg
et
yk
a
R
af
in
er
ie
W
od
a
C
he
m
ik
al
ia
R
op
a
i g
az
P
ap
ie
r
M
et
al
e
Fa
rm
ac
eu
ty
ki
P
rz
em
. s
po
yw
cz
y
M
ot
or
yz
ac
ja
PROCESY
Schemat blokowy automatycznego układu sterowania
Obiekt
Obiekt
sterowania
sterowania
Urz dzenia
Urz dzenia
sensoryczne
sensoryczne
Urz dzenie
Urz dzenie
steruj ce
steruj ce
(
(
sterownik
sterownik
)
)
Urz dzenia
Urz dzenia
wykonawcze
wykonawcze
Urz dzenia
Urz dzenia
wprowadzania
wprowadzania
danych
danych
Urz dzenia
Urz dzenia
rejestracyjne
rejestracyjne
URZ DZENIA
WEJ CIOWE
URZ DZENIA
WYJ CIOWE
OBIEKT
OBIEKT
UKŁAD
UKŁAD
AUTOMATYKI
AUTOMATYKI
40
Podstawowa struktura układów sterowania
Urz dzenie steruj ce
Urz dzenie steruj ce
a=f(e)
a=f(e)
Obiekt sterowania
Obiekt sterowania
y=f(x, z)
y=f(x, z)
I
w
a
r
b
v
x
y
Q
z
z
Wielko ciami wej ciowymi
a do urz dzenia steruj cego s :
wielko ci zwrotne z obiektu
r takie jak sygnały z procesu, np. wielko ci zwi zane z
materiałem, energi i sygnalizacj stanu pracy.
Wielko ciami wyj ciowymi
b z urz dzenia steruj cego s :
wielko ci kierowania
w takie jak: start, stop, tryb pracy (automatyczny, krokowy, r czny),
warto ci zadane i ograniczenia oraz
wielko ci meldunków
v, takie jak informacje o stanie systemu oraz
wielko ci nastawiaj ce
x, które wpływaj na obiekt sterowania.
Wielko ciami sterowanymi
y s wielko ci wyj ciowe z obiektu sterowania. Do wielko ci
sterowanych nale ró ne wielko ci fizyczne, a w procesach produkcyjnych równie parametry
jako ciowe i ilo ciowe, takie jak np. liczba wyrobów.
Wielko ciami zakłócaj cymi
z s niepo dane wielko ci wej ciowe.
Pod I s zestawione strumienie wej ciowe takie jak strumienie materiałów, energii i informacji,
które wpływaj do obiektu sterowania i zmienione opuszczaj go jako strumienie wyj ciowe Q.
Technika automatyzacji
Technika sterowania
Metody stosowane w technice sterowania
sterowanie
sterowanie
regulacja
regulacja
planowanie kierowanie nap dzanie mierzenie nadzorowanie
Przetwarzanie
sygnałów
analogowe
Przetwarzanie
sygnałów
binarne/cyfrowe
Rodzaje sterowania:
- sterowanie funkcyjne
- sterowanie programowe
- sterowanie sekwencyjne
- sterowanie logiczne
Rodzaje rodków
sterowania:
- mechaniczne
- hydrauliczne
- pneumatyczne
- elektromechaniczne
- elektroniczne
- programowe
Poziomy sterowania:
- poziom zakładu
- poziom planowania
- poziom kierowania
- poziom gniazda
- sterowanie maszyn
- sterowanie jednostkowe
- poziom procesu
K
om
un
ik
ac
ja
Funkcje sterownicze i
urz dzenia:
- sterowanie nadrz dne
- sterowanie numeryczne
- sterowanie maszyn
- sterowanie nap dów
- sterowanie procesów
Cechy charakterystyczne techniki sterowania
41
Klasyfikacja układów sterowania
Zorientowane na technologi
Zorientowane na technologi
• Sterowanie programowane
przez poł czenia,
• Sterowanie programowalne
przez pami ,
• Sterowanie przeka nikowe,
• Sterowanie pneumatyczne,
• Sterowanie hydrauliczne.
Zorientowane na funkcje
Zorientowane na funkcje
• Sterowanie logiczne,
• Sterowanie sekwencyjne.
Zorientowane na aplikacj
Zorientowane na aplikacj
• Sterowanie blokadami,
• Sterowanie
bezpiecze stwem,
• Sterowanie spalaniem,
• Sterowanie receptur ,
• …
Zorientowane na sygnały
Zorientowane na sygnały
• Sterowanie analogowe,
• Sterowanie cyfrowe,
• Sterowanie binarne.
Zorientowane na struktur
Zorientowane na struktur
• Sterowanie
synchroniczne.
• Sterowanie
asynchroniczne.
Zorientowane na hierarchi
Zorientowane na hierarchi
• Sterowanie jednostkowe,
• Sterowanie grupowe,
• Sterowanie nadrz dne.
Elementy
Elementy
wykonawcze/
wykonawcze/
nap dy
nap dy
Urz dzenia
Urz dzenia
sensoryczne
sensoryczne
Poziom sterowania
Poziom sterowania
Sieci/
Sieci/
komunikacja
komunikacja
Oprogra
Oprogra
-
-
mowanie
mowanie
Systemy otwarte
RFID
Nap dy
elektryczne
zamiast
hydraulicznych
„Inteligentne”
urz dzenia
obiektowe
Mechatronika
Systemy
przetwarzania
obrazów
J zyki
programowania
wysokiego
poziomu
Systemy
wbudowane
Rozproszone
układy
sterowania
Otwarta architektura
oprogramowania
Przemysłowy
Ethernet
Otwarte
interfejsy
Engineering
Tools
J zyki programowania
wysokiego poziomu
Pełna integracja
poziomu biznesowego
z obiektowym
Sieci
bezprzewodowe
Otwarte
standardy
komunikacyjne
Aplikacje oparte
na Internet’cie
2015
2010
2005
2005
2015
2010
Rok
Rozwój systemów automatyzacji
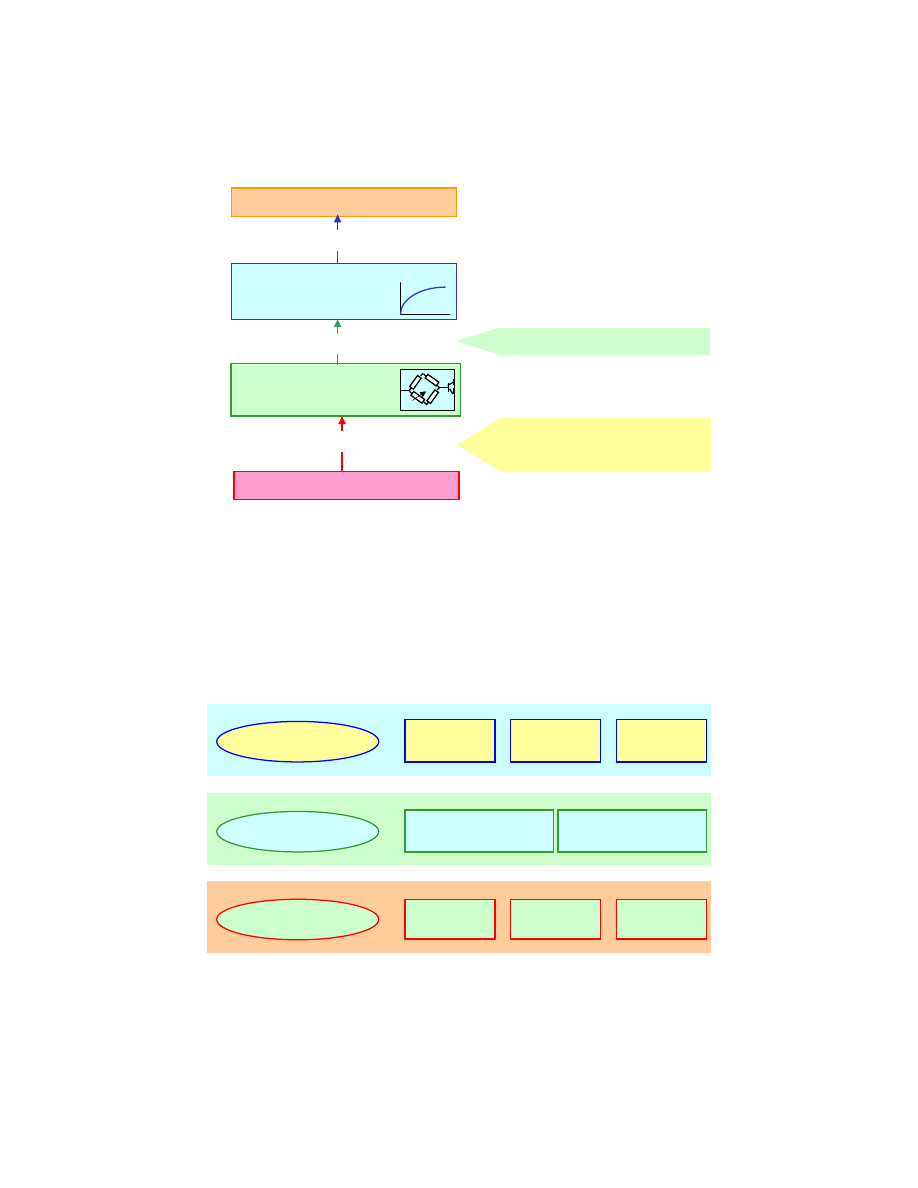
42
Przetwarzanie sygnałów w układzie sensorycznym
Sterownik/ komputer
Sterownik/ komputer
Przetwornik A/C
Przetwornik A/C
Element czujnikowy
Element czujnikowy
Proces
Proces
Ci nienie, siła, droga, pr dko , ...
Temperatura, nat enie wiatła, ..
Napi cie, pr d, ...
Wielko fizyczna
Analogowy sygnał elektryczny
Cyfrowy sygnał elektryczny
Podział sensorów ze wzgl du na sygnały i informacje
Sygnał
analogowy
Sygnał
binarny
Sygnał
cyfrowy
Rodzaj sygnału
Sensor z interfejsem
sieciowym
Mo liwo ci systemu
Sensor
elementarny
Sensor
zintegrowany
Sensor
inteligentny
Funkcjonalno
Sensor bez interfejsu
sieciowego
Kryterium
Kryterium
Własno ci
Własno ci
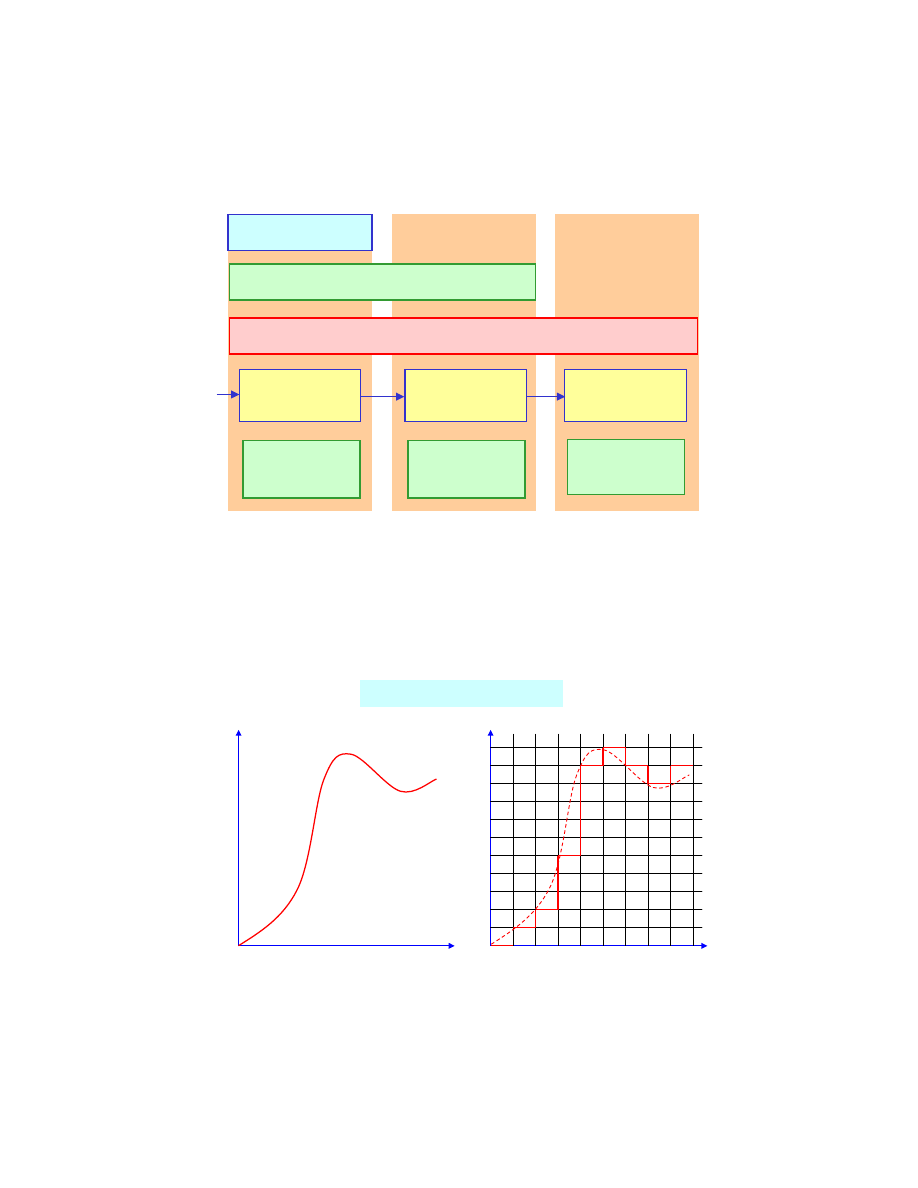
43
Stopnie rozwoju sensorów
Sensor elementarny
Sensor zintegrowany
Sensor inteligentny
Zbieranie
sygnału
Przetwarzanie
sygnału
Ocena
sygnału
Przetworzenie
wielko ci fizycznych
w elektryczne
Kondycjonowanie
Linearyzacja
Filtrowanie
Diagnostyka bł dów,
Nadzorowanie max, min,
Przeliczanie,
Przył czenie magistrali
Rodzaje sygnałów
t
y
C
i
gł
y
t
y
dy
sk
re
tn
y
Ci gle <=> Dyskretnie
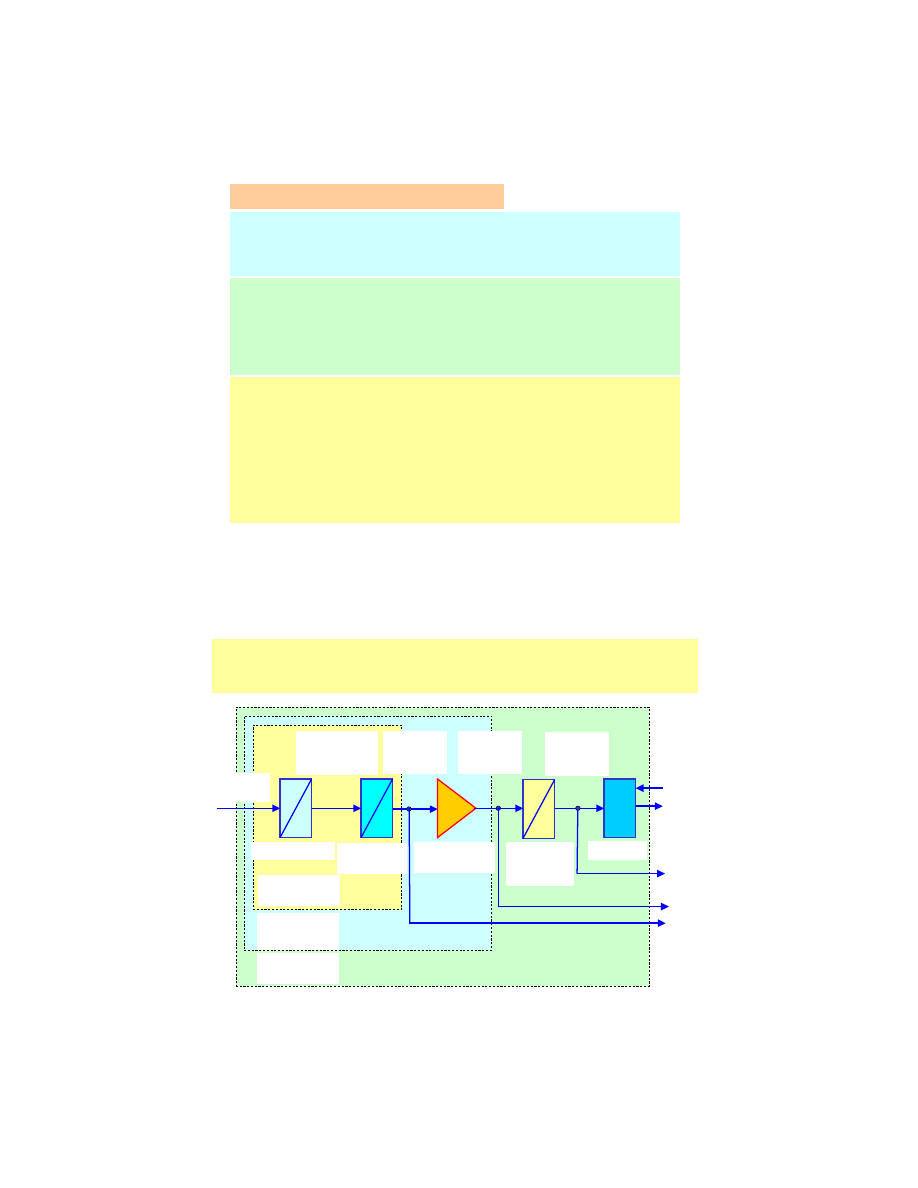
44
Przetwarzanie analogowo-cyfrowe
Przetwornik analogowo
Przetwornik analogowo
-
-
cyfrowy A/C
cyfrowy A/C
Zasada działania
Zasada działania
Porównywanie mierzonego napi cia sygnału ze znanym,
stopniowanym napi ciem odniesienia.
Własno ci:
Własno ci:
• czasy przetwarzania w zakresie ms,
• rozdzielczo 4 do 12 bit,
• stosowany przy du ej dynamice sygnału (np. pomiary drogi).
Warianty:
Warianty:
• metoda zliczania,
• równoległe komparatory,
• przyrostowe przetwarzanie stopni,
• przyrostowe przetwarzanie nad ania,
• sukcesywne przybli anie.
Sensor jest urz dzeniem przeznaczonym do pomiaru wielko ci
Sensor jest urz dzeniem przeznaczonym do pomiaru wielko ci
fizycznych (chemicznych).
fizycznych (chemicznych). Za pomoc sensorów w układzie sterowania
mo na okre li stan zespołu maszyny (urz dzenia) lub procesu.
Sygnał
Sygnał
wyj ciowy
wyj ciowy
(cyfrowy/
(cyfrowy/
analogowy)
analogowy)
A
C
Nieelektryczna
wielko
po rednia
Pierwotna
wielko
elektryczna
Analogowy
sygnał
pomiarowy
Cyfrowy
sygnał
pomiarowy
Przekształcanie
Element
przetwornika
Elektronika
przetwarzaj ca
Przetwornik
analogowo-
cyfrowy
Sterownik
Przetwornik
(prosty sensor)
Sensor
zintegrowany
Sensor
inteligentny
Sygnał
Sygnał
wej ciowy
wej ciowy
Stopie integracji sensorów
45
Przebieg sygnału w sensorze charakteryzuj nast puj ce etapy:
Przebieg sygnału w sensorze charakteryzuj nast puj ce etapy:
1. Przekształcanie sygnału mierzonej wielko ci fizycznej w jedn z
wielko ci po rednich (np. siły na odkształcenie).
2. Przetworzenie mechaniczno-elektryczne na sygnał elektryczny za
pomoc elementu przetwornikowego, przy wykorzystaniu ró nych
zjawisk fizycznych (opór elektryczny, indukcyjno ,
piezoelektryczno ).
3. Przetworzenie elektrycznego sygnału za pomoc układu
elektronicznego w celu: wzmocnienia sygnału, kompensacji waha
punktu zerowego (dryft zera), odfiltrowania sygnałów zakłócaj cych,
linearyzacji sygnału pomiarowego, dopasowania zakresu
pomiarowego oraz normowania sygnału wyj ciowego.
4. Przetworzenie analogowego sygnału pomiarowego na posta
cyfrow za pomoc przetwornika analogowo-cyfrowego.
5. Zintegrowanie komputera w obudowie inteligentnego sensora pozwala
na dalsz obróbk sygnału pomiarowego w celu: nadzorowania
danych pomiarowych, wyzwalania alarmów przy stanach granicznych
sygnału, komunikacji z innymi urz dzeniami (np. sterownik) itp.
Etapy przetwarzania sygnału w sensorze
Ogólne wymagania dotycz ce sensorów:
Ogólne wymagania dotycz ce sensorów:
jednoznaczne odwzorowanie wielko ci wej ciowej w wielko
wyj ciow ,
nieczuło na oddziaływania innych czynników ni mierzona
wielko , w tym na zakłócenia elektromagnetyczne,
liniowo charakterystyki pomiarowej,
normalizacja sygnału wyj ciowego (sygnały analogowe: 0 ... +5V,
-5 ... +5V, -10 ... +10V oraz p tla pr dowa 0 ... 20mA lub 4 ... 20mA;
sygnały cyfrowe z interfejsami: Centronics, RS232, RS485; lub
systemy sieciowe: Profibus, Interbus, CAN, Ethernet, ...),
łatwe zasilanie pr dem (np. +5V, +24V),
mo liwo kontroli sprawno ci działania (np. dioda wiec ca,
zdalne odpytywanie, własne nadzorowanie sensora).
Wymagania stawiane sensorom
46
Zasady pomiaru wielko ci kinematycznych i dynamicznych
x
x
Piezorezystantywna (
R)
x
x
x
x
Piezoelektryczna (
Q)
x
x
Optyczna (
I)
x
Magnetostrykcyjna (
B, t)
x
x
x
Magnetyczna (
B)
x
Nadd wi kowa (czas
przebiegu) (
t)
x
x
x
Pojemno ciowa (
C)
x
x
x
Indukcyjna (
L)
x
x
Potencjometryczna (
R)
F, M, p
a,
εεεε
υυυυ
,
ω
ωω
ω
s,
ϕ
Zasada działania
(
wielko pomiarowa)
Wielko ci kinematyczne:
droga
s
, k t
ϕϕϕϕ
,
pr dko
liniowa
υυυυ
, pr dko
k towa
ω
ωω
ω
,
przyspieszenie
a
, przyspieszenie k towe
εεεε
.
Wielko ci dynamiczne:
siła
F
,
moment obrotowy
M
,
ci nienie
p
.
Potencjometryczne metody pomiaru polegaj na odwzorowaniu
wielko ci wej ciowej przemieszczenia (droga, k t) w zmian oporno ci
potencjometru (liniowego lub obrotowego). Potencjometry te mog by :
drutowe, z przewodz cym tworzywem sztucznym lub hybrydowe.
W metodach indukcyjnych do pomiaru wykorzystuje si oddziaływanie
na indukcj magnetyczn L w cewce wywołane przez ruch ciała
ferromagnetycznego w jej polu magnetycznym. Stosuje si układy:
dławikowe lub transformatorowe.
W pojemno ciowych metodach pomiaru wykorzystuje si zmian
pojemno ci kondensatora płytowego pod wpływem zmian powierzchni,
odległo ci lub przenikalno ci elektrycznej. Stosuje si układy ró nicowe.
Ultrad wi kowe metody pomiarowe s oparte na pomiarze czasu
przebiegu impulsu ultrad wi kowego. Jako przetworniki ultrad wi kowe
stosuje si elementy piezoelektryczne, które przy przyło eniu napi cia
elektrycznego odkształcaj si .
W magnetostrykcyjnych czujnikach pomiarowych wykorzystywane jest
odkształcenie mi kkich magnetycznie materiałów pod wpływem
oddziaływania zewn trznego pola magnetycznego.
Metody pomiaru wielko ci fizycznych
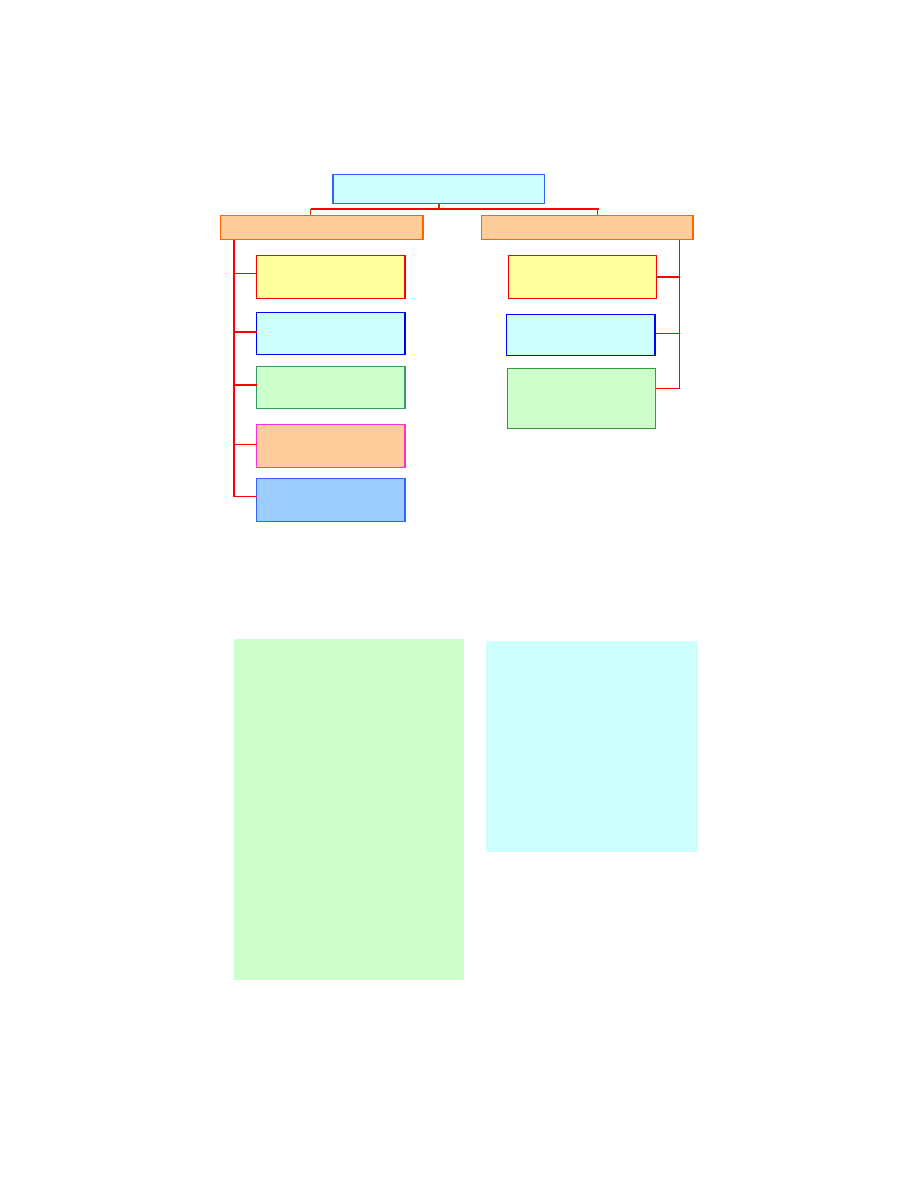
47
Czujniki (sensory)
Czujniki (sensory)
Czujniki inteligentne
Czujniki proste
Pomiar wielko ci
mechanicznych
Pomiar wielko ci
termicznych
Pomiar wielko ci
magnetycznych
Pomiar wielko ci
optycznych
Pomiar wielko ci
chemicznych
Czujniki taktylne
(
dotykowe)
Czujniki wizyjne
Czujniki
audytywne
(
audio)
Ogólny podział czujników (sensorów)
Wielko ci do pomiaru:
Wielko ci do pomiaru:
Długo
K t
Pr dko
Przyspieszenie
Siła
Ci nienie
Nat enie przepływu
Temperatura
Wilgotno
D wi k
Promieniowanie
Koncentracja (st enie)
Nat enie pola magnetycznego
Wielko ci uzyskiwane w
Wielko ci uzyskiwane w
pomiarach:
pomiarach:
Pojemno
Indukcyjno
Oporno elektryczna
Czas
Cz stotliwo
Pr d
Napi cie
Sensory – pomiar sygnałów
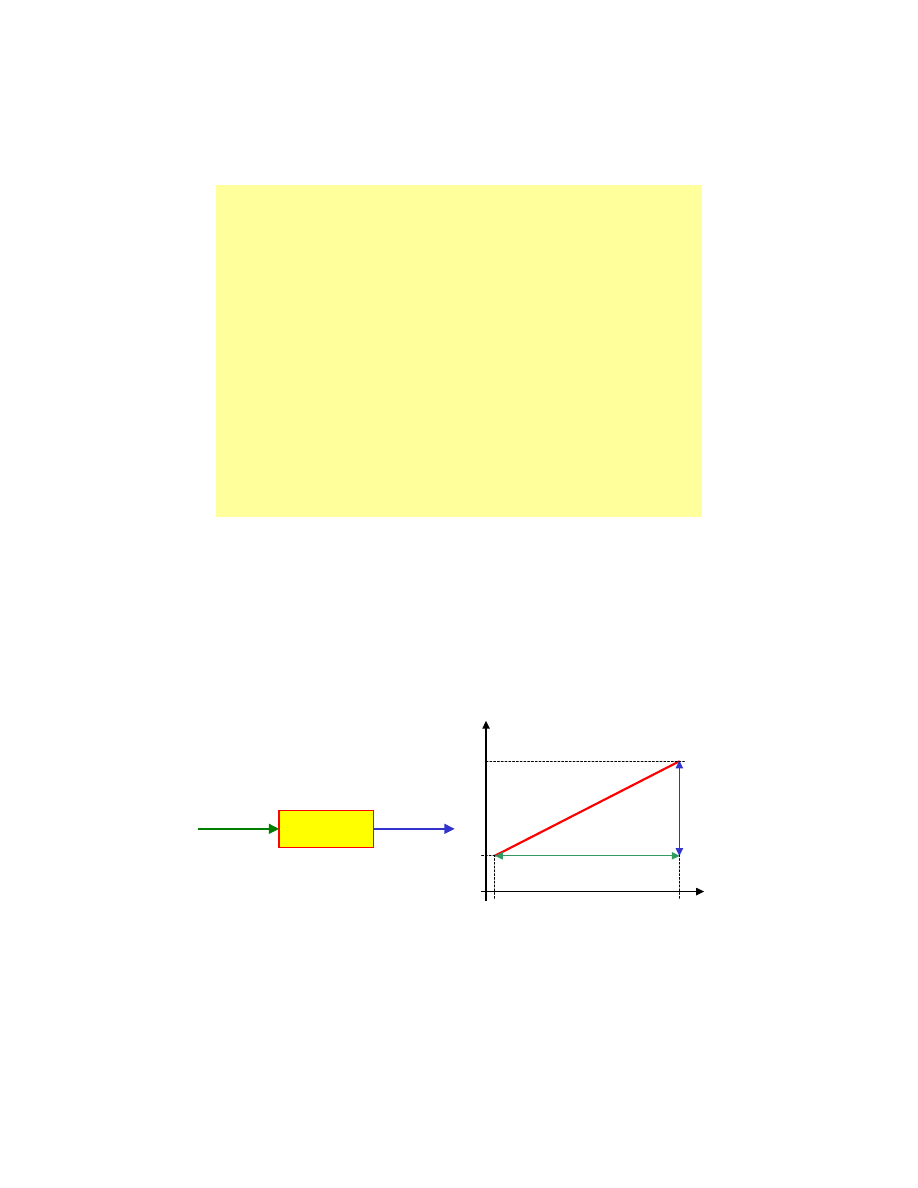
48
Sensory
Sensory mo na
klasyfikowa
klasyfikowa wg ró nych
kryteriów
kryteriów. Takimi kryteriami
mog by np.: rodzaj mierzonej wielko ci, wykorzystane zjawisko
fizyczne, rodzaj sygnału wyj ciowego, zakres pomiarowy, rozdzielczo ,
wymiary itp.
Sensory mog pracowa na zasadzie
stykowej
stykowej lub
bezstykowej
bezstykowej, mog
one by
czynne
czynne (aktywne) lub
bierne
bierne (pasywne).
W sensorach aktywnych elektryczny sygnał wyj ciowy powstaje bez
dostarczania dodatkowej energii pomocniczej (zasilania) dzi ki samemu
działaniu wielko ci mierzonej. Natomiast sensory bierne wymagaj
dostarczania dodatkowej energii, aby uzyska z nich sygnał elektryczny.
Sensory mog mie ró n odporno na działanie warunków rodowiska
(mediów, zakłóce itp.).
Aby na podstawie sygnałów wej ciowych (pokazanych wcze niej)
uzyska sygnały wyj ciowe stosowane s ró ne zjawiska (efekty)
fizyczne. Dlatego te rozró nia si sensory: pojemno ciowe, indukcyjne,
rezystancyjne (oporowe), piezoelektryczne, magnetooporowe,
termoelektryczne, piezoelektryczne, ultrad wi kowe, wykorzystuj ce
efekt
Hall’a itd.
Sensory – pomiar sygnałów c.d.
Sensor
Sensor
Wielko
wej ciowa x
Wielko
mierzona
Wielko
wyj ciowa y
Sensory – pomiar sygnałów c.d.
y
0
+ y
x
0
+ x
y
0
y
x
x
0
y
s
y
x
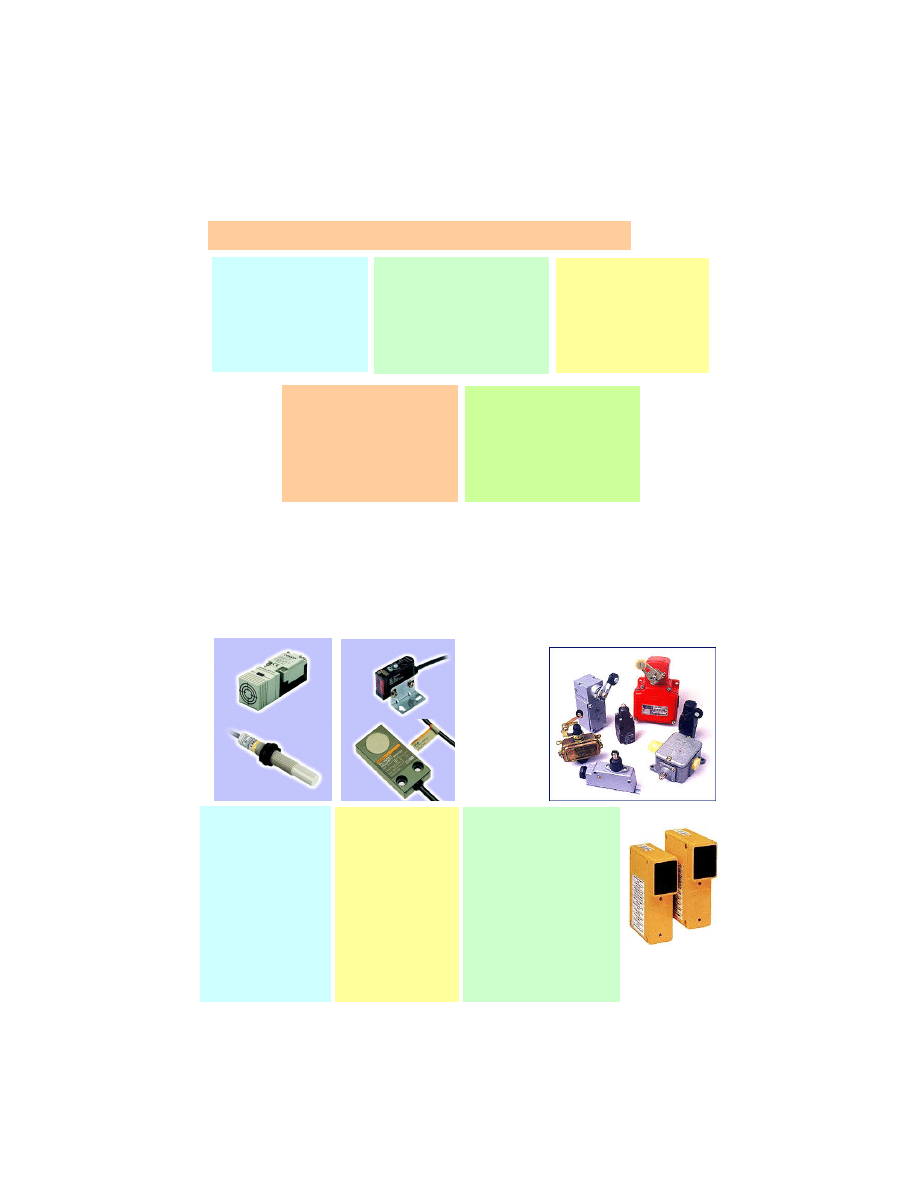
49
Sensory w maszynach i instalacjach produkcyjnych
Podział sensorów ze wzgl du na zastosowanie
Podział sensorów ze wzgl du na zastosowanie
Pomiar wielko ci
fizycznych
Np. ci nienie oleju,
temperatura ło ysk,
siła skrawania
Okre lanie poło enia
lub pr dko ci
Np. poło enie sa ,
pr dko obrotowa
silnika, k t obrotu,
odległo
Ocena optyczna
Np. kontrola butelek,
orientacja przedmiotu
Identyfikacja obiektu
Np. narz dzia, przedmiotu,
zawarto ci magazynu,
osoby
Sprawdzanie istnienia
obiektu
Np. sanie na pozycji
ko cowej, górny poziom
cieczy, przedmiot na
ta mie
Sensory dla maszyn i instalacji produkcyjnych
Inicjatory
Inicjatory
Zadanie
Zadanie
Dostarczanie
informacji binarnych o
tym, czy została
osi gni ta okre lona
pozycja zespołu
roboczego,
wprowadzony
przedmiot, uzyskany
okre lony poziom
napełnienia itp.
Rodzaje
Rodzaje
• Indukcyjne czujniki
zbli eniowe,
• Pojemno ciowe
czujniki
zbli eniowe,
• Mechaniczne
wył czniki
kra cowe,
• Bariery (kurtyny)
wietlne.
Własno ci
Własno ci
• Sposób pracy: stykowy
lub bezstykowy,
• Uzyskiwana
cz stotliwo zał czania:
du a, mała,
• Budowa: pryzmatyczna,
cylindryczna,
• Zastosowanie: wszystkie
materiały, tylko
przewodniki pr du.
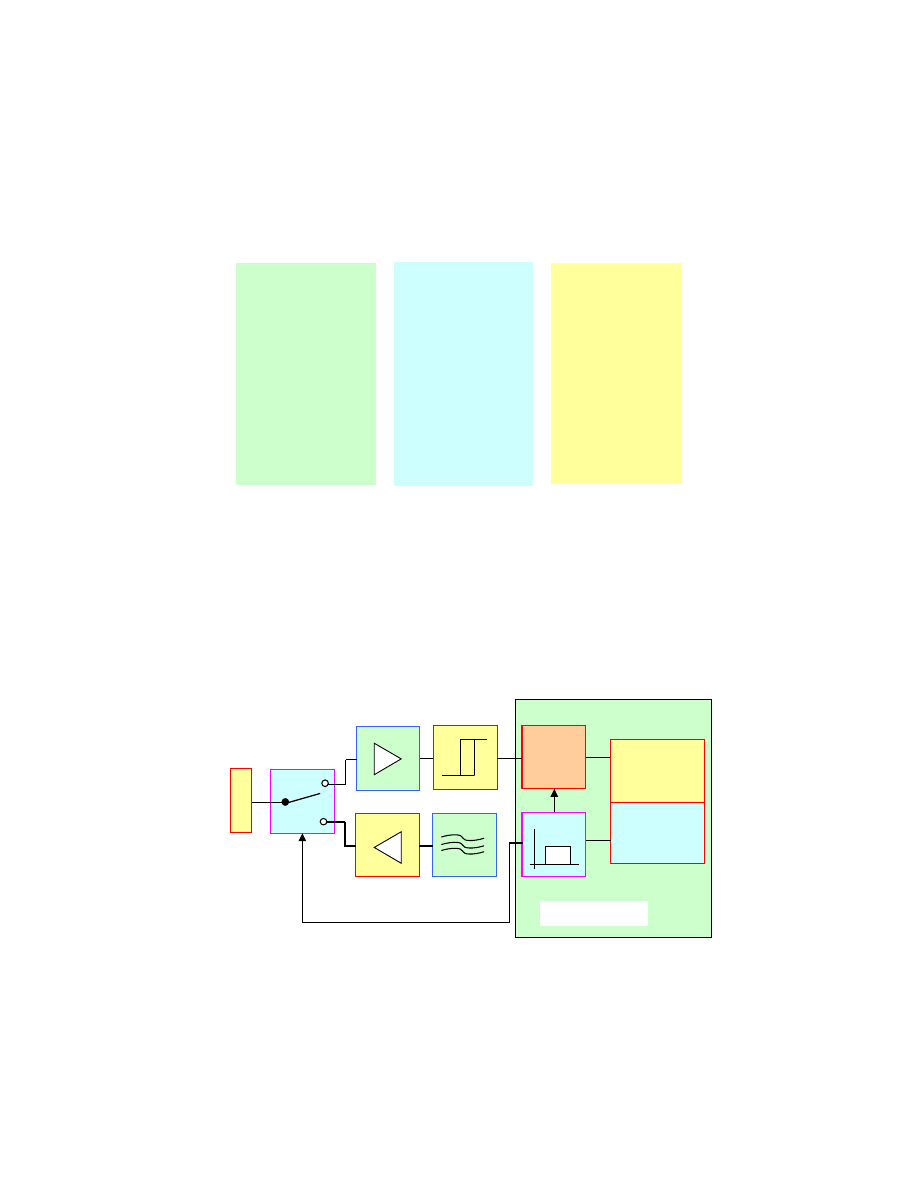
50
Sensory dla maszyn i instalacji produkcyjnych
Systemy identyfikacyjne
Systemy identyfikacyjne
Zadanie
Zadanie
Identyfikacja
przedmiotu,
narz dzia, palety,
pozycji itp., wzgl.
manipulowanie
dodatkowymi
danymi (np.
warto korekcji
narz dzia).
Cz ci składowe
Cz ci składowe
No nik danych,
etykieta z tekstem,
lub kodem
kreskowym wzgl.
programowalny
moduł (
chip
).
Urz dzenie do
zapisu/ odczytu:
skaner laserowy,
kamera itp.
Własno ci
Własno ci
Mo liwo ci: tylko
odczyt lub odczyt
i zapis.
Rodzaje zapisu:
tylko statycznie,
statycznie lub
dynamicznie.
Ogólny schemat blokowy sensora ultrad wi kowego
Opracowywanie
(analizowanie)
Sterowanie
przebiegiem
+1
Przetwornik
ultrad wi kowy
Przeł cznik
odbieranie/
nadawanie
Wzmacniacz
odbioru
Przygotowanie
sygnału
Licznik
Wzmacniacz
nadawania
Generator
Zegar
Mikrosterownik
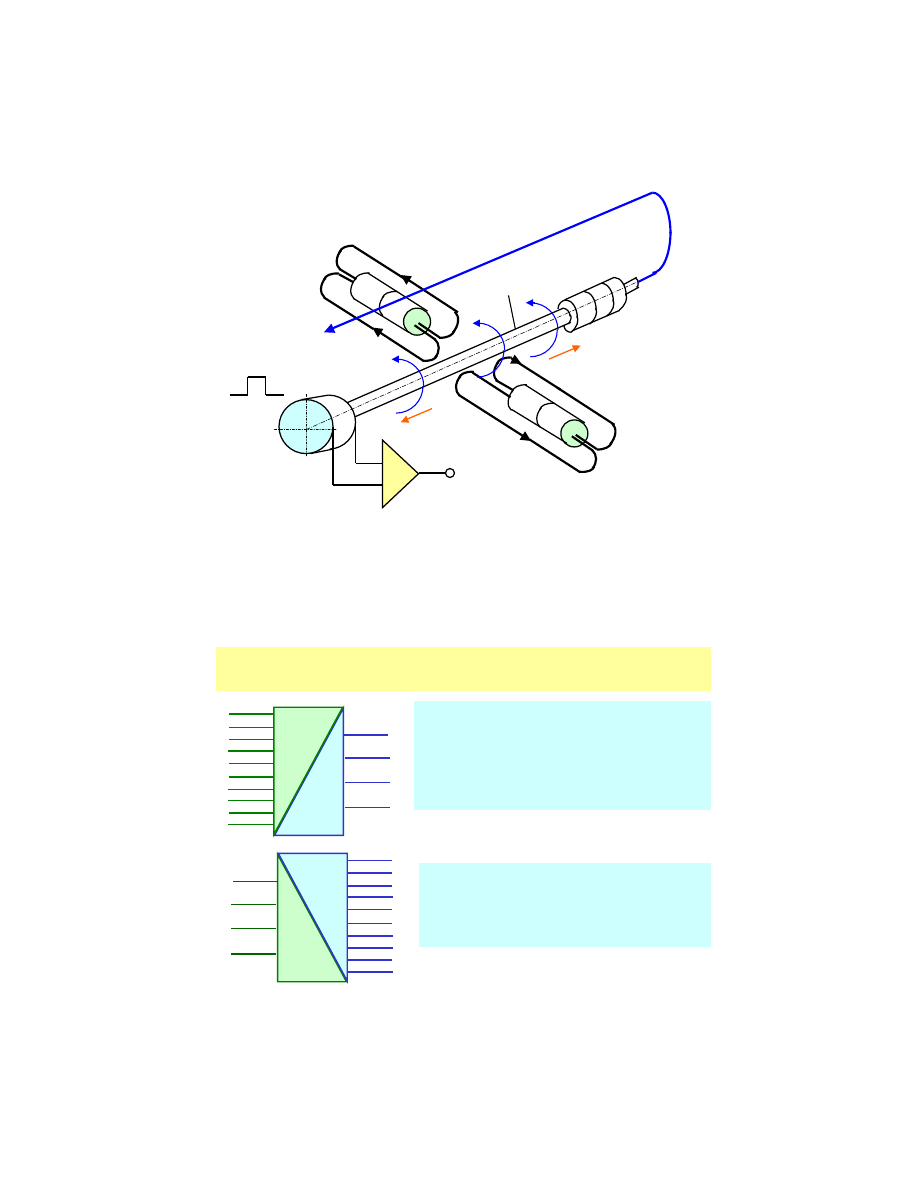
51
Budowa sensora magnetostrykcyjnego
S
N
N
S
Fala
ultrad wi kowa
Fala
ultrad wi kowa
Tłumienie
Wzbudzaj cy
impuls pr dowy
Przetwornik
piezoelektryczny
Odbiornik
Magnesy czujnika
pozycji
Przewód
falowy
Układ (urz dzenie), które przekształca kod ródłowy na kod docelowy
nazywa si
koderem
koderem (przetwornikiem kodu).
Przetwornik kodu, który przekształca cyfry
systemu dziesi tnego w system dwójkowy
ma 10 wej , np. przeł czników i 4 wyj cia,
np. LED. Do zobrazowania dziesi ciu
ró nych stanów potrzebne s przynajmniej
cztery miejsca dwójkowe.
0
1
2
3
4
5
6
7
8
9
Q1
Q2
Q4
Q8
Dziesi t
Dziesi t
-
-
nie
nie
Dwójkowo
Dekoder
Dekoder
Układ, który zakodowan informacj
przekształca ponownie na pierwotny kod
nazywa si dekoderem.
0
1
2
3
4
5
6
7
8
9
I1
I2
I4
I8
Dziesi t
Dziesi t
-
-
nie
nie
Dwójkowo
Kodowanie - dekodowanie
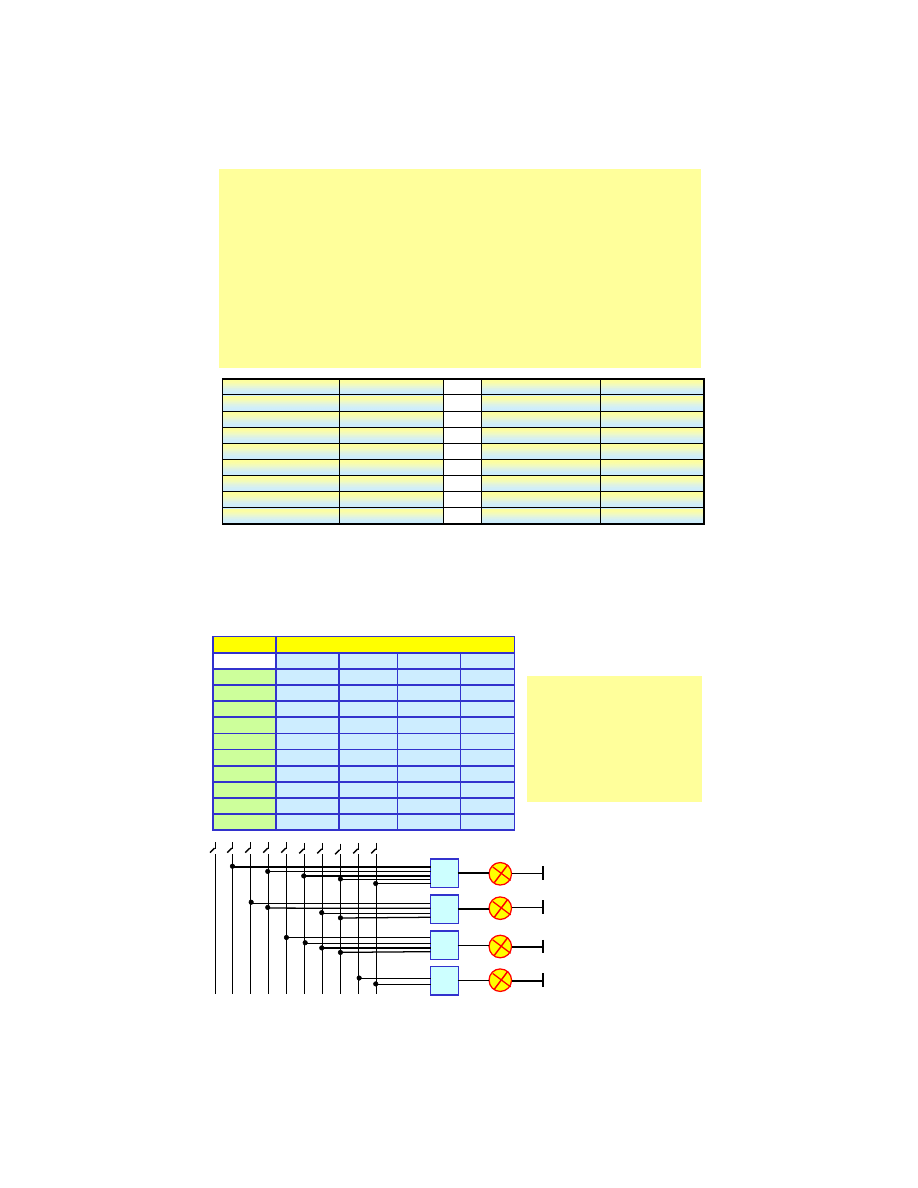
52
W przetwarzaniu informacji istotne znaczenie ma kodowanie danych.
Takim kodem jest np. pismo, a innym znaki Morse’a.
Kod stanowi przepis (klucz) do przyporz dkowania dwóch znaków w
ró nych systemach (alfabetach). W technice cyfrowej istnieje wiele
ró nych kodów, których zastosowanie wynika cz sto z rodzaju aplikacji.
Kod dwójkowy (binarny).
Kod dwójkowy (binarny).
Kod dwójkowy jest sposobem przedstawienia liczby dziesi tnej w
postaci wzorca binarnego: np. liczba
10
10
w kodzie dwójkowym ma
posta :
1010
1010
, czyli
1
1
x
2
3
+
0
0
x
2
2
+
1
1
x
2
1
+
0
0
x
2
0
= 10. Kod ten mo na
opisa za pomoc nast puj cej tabeli kodowej.
Kody, kodowanie/ dekodowanie
1111
15
0111
7
1110
14
0110
6
1101
13
0101
5
1100
12
0100
4
1011
11
0011
3
1010
10
0010
2
1001
9
0001
1
1000
8
0000
0
Wzorzec binarny
Liczba dziesi tna (c.d.)
Wzorzec binarny
Liczba dziesi tna
Realizacja kodowania: dziesi tne - binarne
0
0
0
1
8
1
0
0
1
9
1
1
1
0
7
0
1
1
0
6
1
0
1
0
5
0
0
1
0
4
1
1
0
0
3
0
1
0
0
2
1
0
0
0
1
0
0
0
0
0
Q1
Q1
Q2
Q2
Q4
Q4
Q8
Q8
I
Wyj cia
Wyj cia
Wej cia
Wej cia
Równania
Równania
Boole’a
Boole’a
:
:
Q1
Q1
=
=
1
1
3
3
5
5
7
7
9
9
Q2
Q2
=
=
2
2
3
3
6
6
7
7
Q4
Q4
=
=
4
4
5
5
6
6
7
7
Q8
Q8
=
=
8
8
9
9
Tabela prawdy.
Tabela prawdy.
1
>
-
1
>
-
1
>
-
1
>
-
0
1
2
3
4
5
6
7
8
9
Układ poł cze
Układ poł cze
logicznych
logicznych
Q1
Q2
Q4
Q8
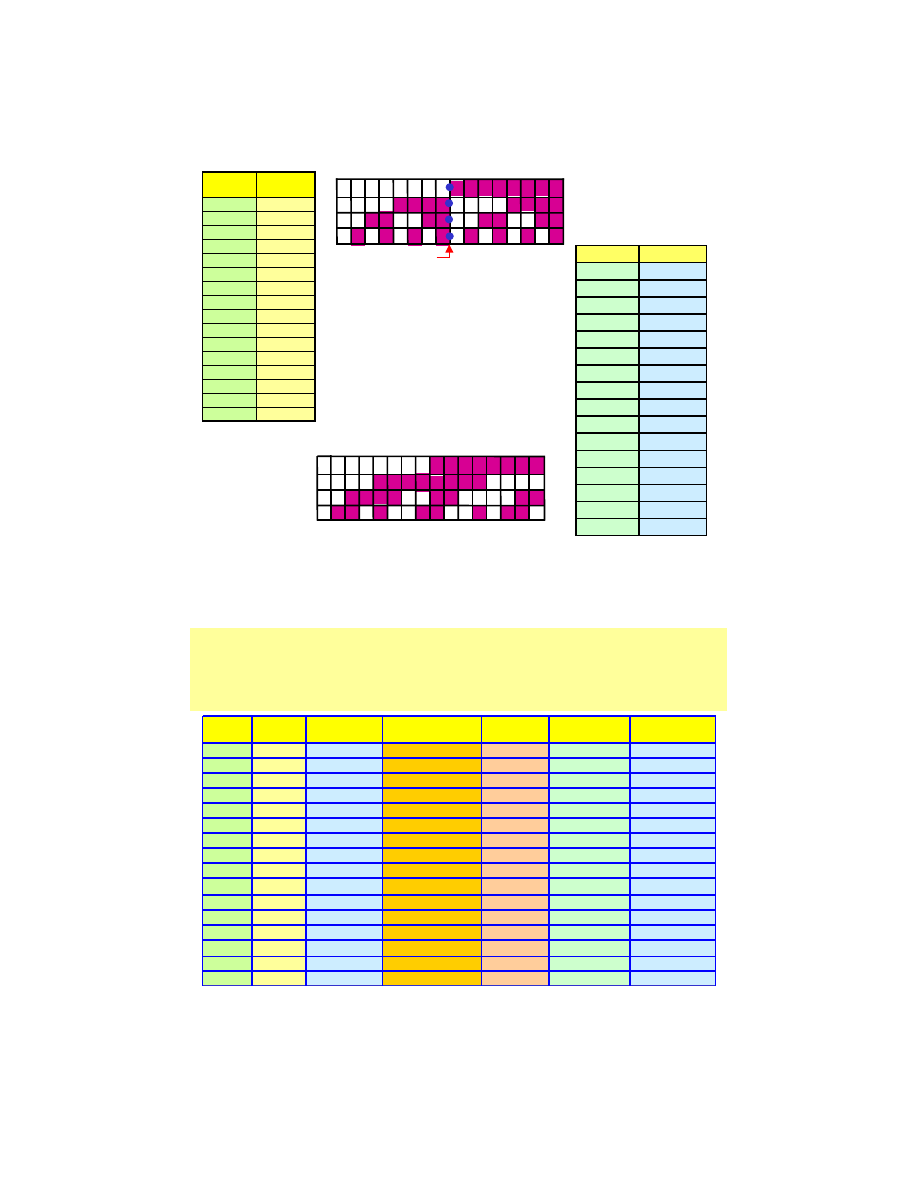
53
Krytyczne miejsce podczas
okre lania pozycji za pomoc
kodu binarnego
8
8
-
-
4
4
-
-
2
2
-
-
1
1.
Taki sam problem wyst puje
podczas pomiaru k tów.
2
3
2
2
2
1
2
0
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Okre lanie pozycji
14
1110
15
1111
13
1101
12
1100
11
1011
10
1010
9
1001
8
1000
7
0111
6
0110
5
0101
4
0100
3
0011
2
0010
1
0001
0
0000
Warto
dziesi tna
Warto
binarna
Kod Gray’a
1011
14
1010
15
1001
13
1000
12
1101
11
1100
10
1110
9
1111
8
0101
7
0100
6
0110
5
0111
4
0010
3
0011
2
0001
1
0000
0
Kod Gray’a
Warto
2
3
2
2
2
1
2
0
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Warto w kodzie Gray’a
-
8
8
-
-
14
1110
-
9
9
-
-
15
1111
-
-
7
-
-
13
1101
8
-
6
9
-
12
1100
-
-
5
8
-
11
1011
-
-
-
7
-
10
1010
-
-
-
6
1001
9
1001
9
-
-
5
1000
8
1000
5
4
-
4
0111
7
0111
4
5
-
3
0110
6
0110
6
7
-
2
0101
5
0101
7
6
4
1
0100
4
0100
2
2
3
0
0011
3
0011
3
3
2
-
0010
2
0010
1
2
1
-
0001
1
0001
0
1
0
-
0000
0
0000
Warto w kodzie
Glixon’a
Warto w kodzie
Gray’a (BCD)
Warto w
kodzie Alken’a
Warto w kodzie
Stibitz’a lub 3-Excess
Warto binarna
w kodzie 8-4-2-1
Warto
dziesi tna
Kod
binarny
Do kodowania cyfr dziesi tnych za pomoc liczb binarnych s wykorzystywane cztery miejsca binarne (dwójkowe). Nie s
przy tym wyczerpywane wszystkie mo liwo ci. Dlatego te s mo liwe równie inne przyporz dkowania. Wtedy powstaj
inne kody, takie jak np. kody
Alken
Alken’a albo
Stibitz
Stibitz’a lub
3
3
-
-
Excess
Excess. Te oba kody s specjalnymi kodami stosowanymi do
oblicze . Ich zalet jest to, e podczas operacji obliczeniowych nie musz by przeprowadzane adne mudne korekcje,
jak to jest konieczne w przypadku oblicze z kodem dwójkowym. Kod
Glixon
Glixon’a ma własno ci kodu
Gray
Gray’a, jest jednak tak
pomy lany, e przy przej ciu z 9 do 0 zmienia si równie tylko jedno miejsce. Dzi ki temu mo na budowa liniały kodowe
lub tarcze kodowe równie w systemie dziesi tnym.
Dalsze kody dziesi tne zakodowane dwójkowo BCD
(ang.
Binary-Coded Decimal)
54
Tarcza kodowa
Liniał kreskowy
Rezolwer
Potencjometr
(obrotowy)
Potencjometr liniowy
Suwak
cie ka
oporowa
Sonda
pomiarowa
Liniał kodowy
Zasada budowy przetworników pomiaru poło enia
Optyczne metody pomiaru przemieszcze
2
3
2
2
2
1
2
0
g
3
g
2
g
1
g
0
Kod dwójkowy (binarny)
Kod Gray’a
Liniały kodowe do pomiaru
przemieszcze liniowych
U
1
U
2
s
Przyrostowy układ pomiaru długo ci
Tarcza przyrostowego przetwornika
obrotowo-impulsowego
Tarcza kodowa bezwzgl dnego
przetwornika poło enia k towego
55
W budowie maszyn cz sto stosuje si obrotowe przetworniki
pomiarowe poło enia dwóch rodzajów: resolwery optyczne i
resolwery indukcyjne.
8
7
6
5
4
3
2
1
0
15
14
13
12
11
10
9
2
n
stanów
Kod binarny
#
kod
#
kod
0
0000
8
1100
1
0001
9
1101
2
0011
10
1110
3
0010
11
1111
4
0110
12
1110
5
0111
13
1011
6
0101
14
1101
7
0100
15
1100
Tarcza optycznego przetwornika typu
single-turn
Liczba cie ek n=4
Budowa i działanie enkodera optycznego
Wałek
cie ka/ kanał
t
H
L
H
L
Do tyłu
Do przodu
Zero
cie ka A
cie ka B
Ło yska
Fotoelementy
Tarcza kodowa
LED
Znak odniesienia
Siatka formuj ca
56
Przykłady przetworników obrotowo-impulsowych
(
enkoderów optycznych)
Historia kodów kreskowych
Po raz pierwszy w praktyce kod kreskowy zastosowano do identyfikacji wagonów kolejowych w roku 1962. Natomiast do
powszechnego u ycia kody kreskowe wesz
ł
y w latach siedemdziesi tych. W Polsce na szersz skal zacz to u ywa kodów
kreskowych dopiero po 1990 roku, tzn. od przyst pienia do Mi dzynarodowego Stowarzyszenia Kodowania Towarów IANA
(
International Article Numbering Associacion
). Obecnie jest to EAN International. Najpierw kody kreskowe zacz to powszechnie
stosowa w handlu detalicznym w Stanach Zjednoczonych i Kanadzie, co by
ł
o spowodowane ch ci podwy szenia wydajno ci
pracy, usprawnienia obs
ł
ugi klientów i u
ł
atwienia ewidencji w punktach sprzeda y. Korzy ci p
ł
yn ce z ich zastosowania
wzbudzi
ł
y zainteresowanie tak e w innych krajach, a w szczególno ci w Europie. Nast pnym krokiem by
ł
o wykorzystanie kodów
kreskowych na potrzeby przemys
ł
u i w innych dziedzinach.
W zwi zku ze wzrastaj cym zainteresowaniem Elektroniczn Wymian Danych (EDI) kody kreskowe zacz to równie u ywa w
komunikatach EDI, co rozszerzy
ł
o zakres ich zastosowa .
Kod kreskowy jest kombinacj nast puj cych po sobie jasnych i ciemnych kresek odzwierciedlaj cych ci g znaków (w
zale no ci od standardu - cyfr, liter lub wszystkich znaków ASCII). Kreski te s elementami kodu. Jasne kreski mo na te
okre li jako przerwy pomi dzy kreskami ciemnymi. Kombinacje nast puj cych po sobie ró nej grubo ci kresek i przerw
reprezentuj okre lone znaki. Po lewej i prawej stronie kodu kreskowego znajduje si wolna przestrze szeroko ci przynajmniej
1/4", ułatwiaj ca czytnikowi zorientowanie si gdzie kod kreskowy si zaczyna i gdzie si ko czy (Start i Stop).
W trakcie czytania kodu, wiatło pochodz ce z czytnika jest odbijane przez jasne elementy kodu (przerwy), a pochłaniane przez
jego ciemne elementy (kreski). wiatło odbite od przerw powoduje powstanie w czytniku słabszych sygnałów elektrycznych,
natomiast w wyniku braku odbicia (kreski) powstaj silniejsze sygnały. W zale no ci od grubo ci kresek ró na jest te długo
trwania poszczególnych sygnałów. W wyniku tego powstaje ci g sygnałów elektrycznych o ró nym nat eniu i ró nej długo ci.
Jest to tylko nieco bardziej skomplikowane od zasady działania alfabetu Morse'a. Otrzymane w ten sposób impulsy elektryczne
s t
ł
umaczone przez dekoder czytnika na j zyk cyfr, liter i innych znaków ASCII. W tym „normalnym” ju formacie dane trafiaj
do komputera.
Kod kreskowy (podobnie wiele innych technik automatycznej identyfikacji) rzadko sam w sobie zawiera istotn dla jego
u ytkownika informacj . Jest tylko swego rodzaju identyfikatorem, pozwalaj cym na szybkie otrzymanie potrzebnych danych.
Dane zawarte w samym kodzie kreskowym s tylko ci giem znaków (identyfikatorem), któremu w odpowiedniej bazie danych
przyporz dkowane s pewne informacje. Dla przykładu, kod kreskowy wydrukowany przez producenta na oryginalnym
opakowaniu towaru (np. soku w kartonie), nie zawiera informacji dotycz cej ceny tego towaru. Istnieje tak e mo liwo
zapisania pewnych danych bezpo rednio w tre ci kodu kreskowego. Stosuje si j jednak raczej rzadko i ma ona sens jedynie
w przypadku danych o małej ilo ci znaków (np. oznaczenie tylko daty produkcji towaru). Je li zachodzi konieczno
zapisu nieco
obszerniejszych informacji bez odwoływania si do zewn trznych baz danych, to od niedawna stosuje si specjalne standardy
kodów kreskowych - kody pi trowe inaczej zwane kodami dwuwymiarowymi.
Podstawy kodów – kody kreskowe
57
Podstawowe rodzaje kodów kreskowych:
• liniowe 1D,
• dwuwymiarowe 2D oraz
• hybrydowe.
Symbole linearnych kodów kreskowych s
łatwo rozpoznawalne przez pionowe paski ciemne i jasne o ró nych
szeroko ciach. Kod kreskowy nie został zdefiniowany w pojedynczym dokumencie. Obecnie istnieje na wiecie ponad 400
ró nych rodzajów linearnych kodów, natomiast te najbardziej u ywane to: Code 128, Code 39, EAN-13, EAN-8, EAN-128, ITF
(przeplatany 2 z 5), UPC-A i UPC-E.
Podział linearnych kodów kreskowych 1D mo e by dokonany w zale no ci od ilo ci ró nych rodzajów pasków stosowanych w
danym kodzie. Mo na wyró ni nast puj ce typy linearnych kodów kreskowych:
• 2W - kody kreskowe, w których wyst puj paski o dwóch ró nych szeroko ciach,
• 4W - kody kreskowe, w których wyst puj paski o czterech ró nych szeroko ciach,
• 4S - kody kreskowe, w których paski kodu kreskowego mog wyst pi w 4 ró nych stanach.
Kody dwuwymiarowe 2D mo na podzieli na dwie grupy: symboliki macierzowe i wielowierszowe (liniowe) kody kreskowe.
Symboliki macierzowe maj posta macierzy punktów, natomiast wielowierszowe maj wygl d zbli ony do linearnych kodów
kreskowych z bardzo krótkimi paskami, uło onymi jeden na drugim.
Kody hybrydowe s kategori kodów kreskowych, które stanowi poł czenie cech kodów linearnych i dwuwymiarowych.
Niektóre kody kreskowe mog przedstawia tylko cyfry (przeplatany 2 z 5, EAN-8, EAN-13, UPC), inne cyfry i litery (Code 39,
Code 128), przy czym tylko Code 128 mo e przedstawia wszystkie 128 znaków ASCII. Niektóre kody maj
ci le okre lon
liczb znaków (EAN-8 jest o mio-, EAN-13 - trzynasto-, UPC-A - dwunasto-, a UPC-E - sze ciocyfrowy). Kody o zmiennej
długo ci to m.in.: Code 128, Code 39.
Aby zwi kszy pewno
odczytu kodu stosuje si do
szeroko sumy kontrolne. Sumy kontrolne wyst puj najcz ciej w formie
jednego znaku na ko cu kodu. Tak jest np. w przypadku EAN-8 i EAN-13 - z tego wła nie wzgl du mimo, e potencjalnie da si
w nich zapisa odpowiednio: 13 i 8 cyfr, to wykorzysta mo na tylko 12 i 7. Cyfra kontrolna liczona jest wg specjalnego
algorytmu skonstruowanego tak, aby łatwo mo na było wychwyci wszelkie przekłamania odczytu. Oczywi cie algorytm ten
równie musi by standardowy - tak aby ka dy czytnik kodów kreskowych potrafił go obliczy (czyli sprawdzi poprawno
cyfry
kontrolnej). W niektórych kodach cyfra kontrolna jest widoczna (np. EAN-13), a w innych jest ukryta (np. Code 128). W kodzie
Code 39 cyfra kontrolna mo e, ale nie musi wyst powa .
Podstawy kodów c.d.
Uproszczon wersj kodu EAN-13 jest EAN-8. Uproszczenie to polega na pomini ciu identyfikacji zakładu produkcyjnego.
Kod ten zawiera wi c informacje na temat kraju produkcji (3 cyfry) oraz rodzaju towaru (4 cyfry), a ostatni ósmy znak to
cyfra kontrolna. Znaki po lewej stronie kodu kodowane s wg zbioru A, a po prawej stronie wg zbioru B (sposób kodowania
w zbiorach jest identyczny jak w EAN-13). Ka da kreska zbudowana jest z 1, 2, 3 lub 4 modułów, a ka dy znak z 7
modułów. Po lewej i prawej stronie kodu s nieco dłu sze kreski - to znaki START i STOP o szeroko ci równej jednemu
modułowi.
EAN-13 Kod ten jest europejsk odmian , opracowanego w 1973 r. w USA i Kanadzie, kodu UPC (
Universal Product Code
). Kody EAN
(
European Article Numbering
) rozpowszechniły si w handlu detalicznym, hurtowniach i magazynach. To wła nie EAN widnieje na
wszystkich niemal opakowaniach towarów w sklepach, gdy tego standardu u ywa si do nadawania unikalnych numerów produktów.
Pierwsze trzy cyfry EAN-13 oznaczaj kraj, w którym towar wyprodukowano, nast pne cztery wskazuj konkretnego producenta,
natomiast pozostałe pi
opisuje sam towar. Ostatni element to obligatoryjna cyfra kontrolna - tak wi c z 13 cyfr do dyspozycji pozostaje
12. W kodzie EAN-13 zapisywa mo na jedynie cyfry (0-9).
EAN-13 ma znak START i STOP - skrajne dwie cienkie kreski o szeroko ci jednego modułu. Pozostałe kreski maj szeroko ci b d ce
jego wielokrotno ci (1, 2, 3, 4). Ka dy znak zbudowany jest z 7 modułów. Znaki w lewej cz ci kodu kodowane s w dwóch zbiorach A
lub B (wybór zbioru zale y od pierwszej cyfry), a znaki po prawej stronie - w zbiorze C. Moduł nie mo e mie dowolnej szeroko ci -
standard okre la precyzyjnie zbiór dopuszczalnych szeroko ci. Tego kodu nie da si płynnie skalowa i dlatego te wa ne jest aby był on
reprezentowany wektorowo. Z tego powodu jest to kod stosunkowo trudny do wydruku - szczególnie na drukarkach igłowych.
EAN-13 to prawdopodobnie najpowszechniej na wiecie stosowany kod kreskowy. Zdecydowana wi kszo
towarów konsumpcyjnych jest oznaczana za pomoc tego kodu. Spotka wi c go mo na w praktycznie ka dym
sklepie czy supermarkecie. Nad unikalno ci kodu czuwa EAN International zrzeszaj ce krajowe organizacje EAN
przydzielaj ce numery w ramach przydzielonego dla danego kraju prefiksu.
Kod kreskowy EAN-128 został oparty na popularnym kodzie Code 128. Wła ciwie jedyna istotna ró nica polega na tym, e pierwszym
znakiem po znaku startowym jest symbol FNC1 (zreszt przewidziany w symbolice Code 128). Podstawowa zaleta EAN-128 to dokładna
standaryzacja jego zawarto ci. W kodzie tym przechowywa mo na np. dat produkcji, dat pakowania, ilo
a nawet numer zamówienia.
Ka da z tych informacji ma przewidziany norm prefiks (np. data pakowania: 1
2
, data produkcji 11). Poszczególne informacje ł czy si w
jeden ci g, np.:
11990120 - oznacza dat produkcji (bo 11): 1999-01-20,
12990121 - oznacza dat pakowania (bo 12): 1999-01-21.
Jedno i drugie mo na zawrze w jednym kodzie: 1199012012990121.
Kod EAN-128 daje zupe
ł
nie nowe mo liwo ci w zakresie wymiany informacji pomi dzy partnerami handlowymi, a dzi ki standaryzacji
rozumienie tych kodów kreskowych jest wsz dzie to samo.
Kody kreskowe
58
Przykład zastosowania kodu dwuwymiarowego (2D)
Laserowe znakowanie frezów kodem Data
Laserowe znakowanie frezów kodem Data
Matrix
Matrix
Do identyfikacji narz dzi i ich zabezpieczenia przed
fałszowaniem np. frezy mog by u producenta
znakowane kodem
Data
Data
Matrix
Matrix. Na podstawie tego
kodu mog nast pnie by np. wywoływane dane
narz dziowe podczas ostrzenia freza. Ponadto kod
Data Matrix mo e chroni wysoko-precyzyjne
narz dzia przed fałszowaniem. Frezy o rednicach w
zakresie 6-20mm mog by znakowane w
zautomatyzowanej linii wytwórczej.
Za pomoc pompowanej diod Nd:YAG laserowej jednostki znakuj cej typu
MISTRAL, która jest zintegrowana z lini wytwórcz narz dzi frezarskich, mo na
realizowa znakowanie frezów kodem Data Matrix. Laserowa jednostka
znakuj ca jest tutaj zintegrowana w zrobotyzowanym gnie dzie do polerowania
narz dzi. Frezy s pobierane przez robota i umieszczane w przyrz dzie pod
laserem. W ci gu jednej sekundy na stalow powierzchni trzpienia freza jest
nanoszony laserowo kod macierzowy o wymiarach 3 x 3 mm. Nadrz dny
komputer steruj cy przekazuje do jednostki znakuj cej aktualn zawarto kodu
jak równie typ narz dzia. Po oznakowaniu narz dzie jest odbierane przez robot
z urz dzenia do znakowania i polerowane na obracaj cych si szczotkach.
Ta metoda znakowania przez powierzchniowe zmiany w materiale tworzy trwałe
i zabezpieczone przed fałszowaniem oznakowanie wyrobu. Dzi ki w skiemu
promieniowi lasera, mniejszemu od 40
µµµµ
m, taki kod mo e mie małe wymiary i
mo e by nanoszony tak e na zakrzywionych powierzchniach trzpienia freza.
Przykład znakowania
kodem Data Matrix
obudowy skrzyni korbowej
silnika spalinowego.
Identyfikacja narz dzi (
chip) – zarz dzanie informacj
numer identyfikacyjny
bie cy numer narz dzia
(indywidualny)
numer kodu dla obrabiarki
dane korekcyjne:
- długo ,
- rednica,
- promie ,
- ...
system narz dziowy,
status narz dzia,
stan narz dzia,
okres trwało ci,
transportat (historia pobytu)
Chwyt walcowy
Chwyt sto kowy
Chwyt dla głowicy

59
Działanie
Działanie
transpondera
transpondera
.
.
Je eli transponder znajduje si w obszarze anteny zapisu/odczytu, to w przypadku bezbateryjnych transponderów
najpierw nast puje ładowanie energii. Nast pnie transponder wysyła zawarto swojej pami ci danych do stacji
zapisu/odczytu lub te otrzymuje nowe dane, które s zapami tywane. Dialog wzgl. transmisja danych odbywa si
cyklicznie i jest powtarzana, jak długo transponder znajduje si w obszarze obszaru transmisji. Niezawodno
transmisji danych jest zapewniana przez odpowiedni protokół.Zasi g transmisji danych jest zale ny po pierwsze od
wielko ci anteny transpondera, stacji zapisu/odczytu oraz od tego czy chodzi o bierny czy te aktywny typ
transpondera. W transponderach aktywnych, w zale no ci od wykonania mo e to by odległo do 100 m,
natomiast w transponderach biernych odległo ta zawiera si w przedziale 2-70 cm.
Zastosowania.
Zastosowania.
Zastosowania techniki
RFID
RFID (
Radio Frequency IDentification) s bardzo ró norodne. Rozci gaj si one od prostej
identyfikacji, np. w systemach otwierania drzwi, do zło onych układów sterowania, np. w liniach produkcyjnych. To,
e zawarto
transpondera mo na zmienia podczas jego u ytkowania, umo liwia umieszczanie w nim meldunków
stanu lub statusu, które mog by nast pnie bezpo rednio przetwarzane przez inteligentne czytniki. Identyfikacja za
pomoc RFID jest sensowna w trudnych warunkach, w których zawodz metody optyczne.
Transponder
Transponder jest mikroelektronicznym obwodem z antenami nadawcz i odbiorcz ,
z logicznym układem steruj cym oraz pami ci danych i magazynowaniem energii.
Takie obwody s umieszczane w ró nego rodzaju obudowach, np.
j
ako naklejane
etykiety, przyciski, kary
chip’owe, ruby, trzpienie lub plakietki. Obudowy s
hermetycznie zamkni te i odporne na działanie uderze , drga , ci nienia, rodków
chemicznych i temperatury. Istnieje dwa zasadnicze rodzaje takich pami ci danych.
Pierwsze z nich mo na tylko jednorazowo zapisa (transpondery programowane na
stałe), natomiast drugie umo liwiaj wymian lub nadpisanie zapami tanych
informacji (transpondery programowalne). Dalej rozró nia si takie transpondery,
które energi potrzebn do transmisji informacji i przechowywania danych pobieraj
z baterii (systemy aktywne) oraz systemy bierne, które s zasilane przez pole
elektromagnetyczne.
Transpondery – technika RFID
Wyszukiwarka
Podobne podstrony:
ZIP 2012 Podst automat cz2
ZIP 2012 Podst automat cz3
ZIP 2012 Podst automat cz4
ZADANIA Z KOLOKWIUM Z PODST automatyki A[1]. Kochan, Semestr IV, Wspólne, Podstawy automatyki
syll 2. admin.publ. zao 2011 2012 podst pr pr i pr urzedn, WAŻNE
automatyka cz ony
2012 podst edytor dla stud z
ZIP 2013 progr Automatyzacja i roboty, SGGW Technika Rolnicza i Leśna, Automatyka
plan zajec oiur zip 2012 02
Punkt 5 Elementy Liniowe Ukladow Automatyki cz 1
automatyka cz ony
więcej podobnych podstron