
W
W
Y
Y
K
K
Ł
Ł
A
A
D
D
8
8
P
P
R
R
Ę
Ę
D
D
K
K
O
O
Ś
Ś
Ć
Ć
D
D
E
E
F
F
O
O
R
R
M
M
A
A
C
C
J
J
I
I
,
,
T
T
E
E
N
N
S
S
O
O
R
R
P
P
R
R
Ę
Ę
D
D
K
K
O
O
Ś
Ś
C
C
I
I
D
D
E
E
F
F
O
O
R
R
M
M
A
A
C
C
J
J
I
I
,
,
Z
Z
W
W
I
I
Ą
Ą
Z
Z
K
K
I
I
K
K
O
O
N
N
S
S
T
T
Y
Y
T
T
U
U
T
T
Y
Y
W
W
N
N
E
E
“Gallery of Fluid Motion”-M. Samimy, K.S. Breuer
Równanie ruchu Cauchy’ego – Lagrange’a
opisuje ruch dowolnego ośrodka ciągłego
.
Dla płynu Pascala - płynu idealnego, w którym styczne siły
powierzc
hniowe są równe zero – tensor zależy jedynie od
ciśnienia
p
dv
F
dt
Aby otrzymać równanie ruchu konkretnego ośrodka należy
zdefiniować tensor
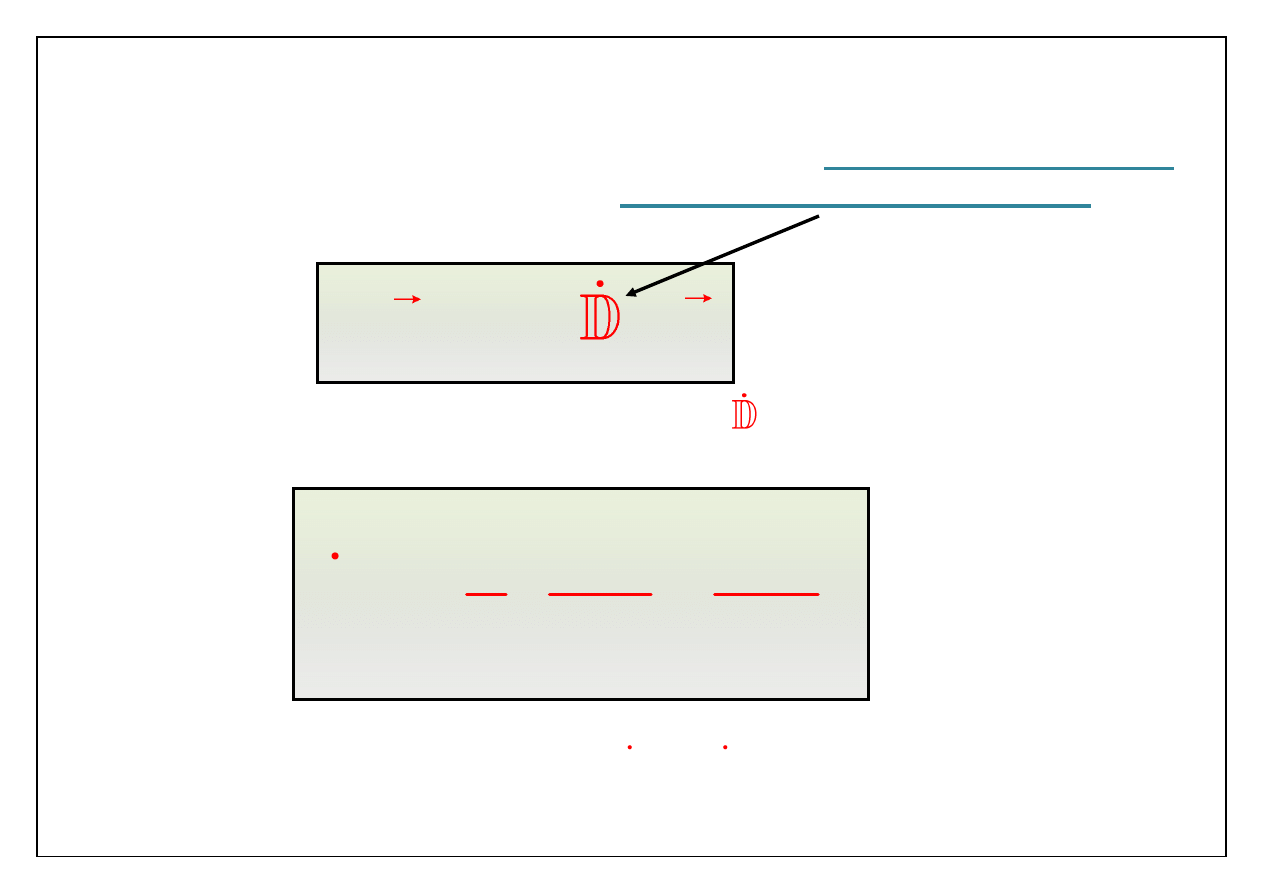
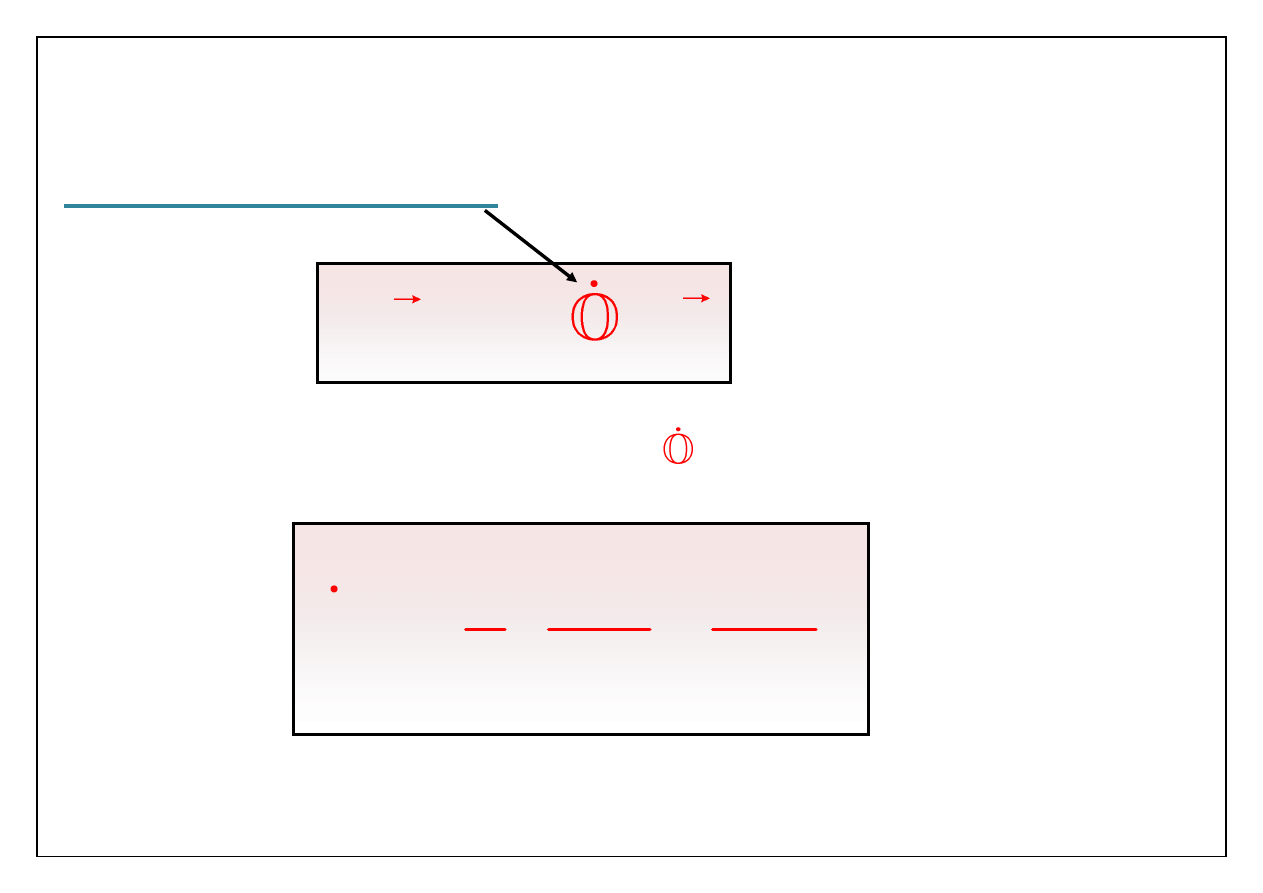
Naszym celem będzie określenie składnika prędkości
wynikającego z odkształcenia. Otrzymamy go odejmując od
całkowitej prędkości ośrodka ciągłego prędkość występującą
w ciele sztywnym.
Ciało sztywne: przemieszcza się i obraca
Płyn: przemieszcza się, obraca i ulega
odkształceniu
W rzeczywistości określenie
jest bardziej z
łożone. Tensory
naprężenia dla ośrodków ciągłych zależą od odkształcenia
oraz prędkości odkształcenia(deformacji).
Dla ciała sztywnego możemy zapisać:
0
v t, r
v (t)
(t) r
0
v
-
prędkość ciała określająca przesunięcie
r
-
iloczyn wektorowy prędkości kątowej
z wektorem
przesunięcia
r
. J
est to człon związany z obrotem.
Można pokazać, że dla obrotów z dowolną prędkością
jest
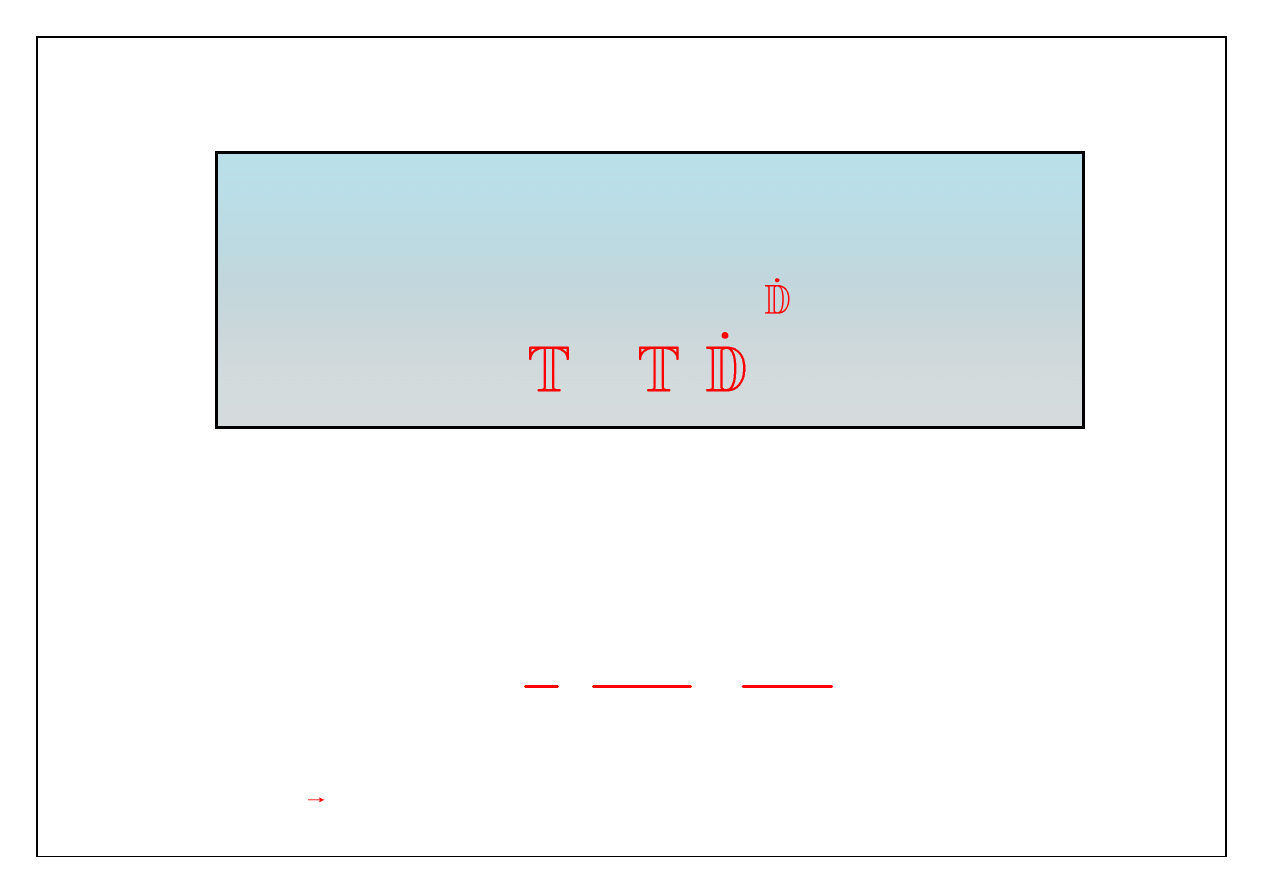
Rozpatrzmy teraz ruch dwu bliskich punktów materialnych w ciele
odkształcalnym. Odległość między nimi jest znikoma, a więc
i
i
v
v r
dr
v(r)
dx
x
rot v
2
0
1
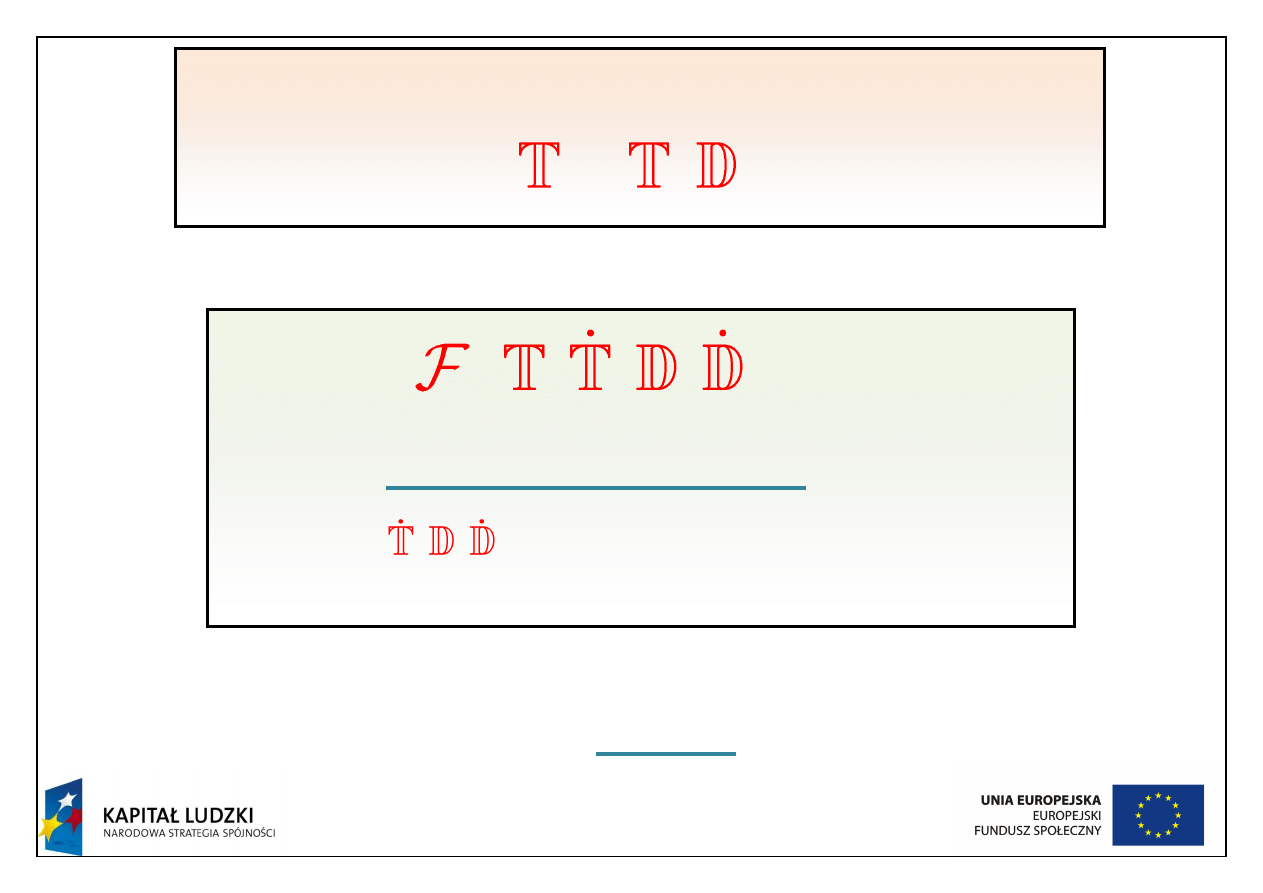
v(t, r)
v
rot v r
2
wtedy
Dla
dr
→ 0
możemy zaniedbać wyrazy wyższego rzędu. Wtedy
powyższe równanie dla składowych
k
v (r)
przyjmuje postać:
k
k
k
i
i
v
v
r
dr
v (r)
dx
x
Zapiszmy to w nieco inny sposób
k
i
k
i
k
k
k
k
i
i
i
k
i
k
v
v
v
v
1
1
v (r
dr)
v
dv
v
dx
dx
2
x
x
2
x
x
Składnik związany z
odkształceniem
(dv
k
)
def
Składnik związany z
obrotem (w nawiasie są
składowe rotacji
prędkości)
(dv
k
)
rot
T
T
E
E
N
N
S
S
O
O
R
R
P
P
R
R
Ę
Ę
D
D
K
K
O
O
Ś
Ś
C
C
I
I
D
D
E
E
F
F
O
O
R
R
M
M
A
A
C
C
J
J
I
I
Składnik związany z odkształceniem nazywa się
prędkością deformacji
.
Zapiszmy go
wektorowo z użyciem
ten
sora prędkości deformacji:
Macierz tensora
prędkości deformacji
określa się następująco:
Tensor ten jest symetryczny bo
ki
ik
D
D
def
dv
dr
k
i
ki
i
k
v
v
1
D
2
x
x
T
T
E
E
N
N
S
S
O
O
R
R
P
P
R
R
Ę
Ę
D
D
K
K
O
O
Ś
Ś
C
C
I
I
O
O
B
B
R
R
O
O
T
T
U
U
Składnik związany z obrotem zapiszmy wektorowo z użyciem
tensora prędkości obrotu
Macierz
tensora prędkości obrotu
określa się następująco:
rot
dv
dr
k
i
ki
i
k
v
v
1
O
2
x
x
Z
Z
W
W
I
I
Ą
Ą
Z
Z
K
K
I
I
K
K
O
O
N
N
S
S
T
T
Y
Y
T
T
U
U
T
T
Y
Y
W
W
N
N
E
E
Dla ciała sprężystego podlegającemu prawu Hooke’a tensor
zależy od odkształceń. Tensor odkształcenia ma postać:
Gdzie wektor
w
to przemieszczenie.
Płyn prosty to ośrodek ciągły, w którym tensor
naprężenia
jest funkcją tensora prędkości
odkształcenia
( )
k
i
ki
i
k
w
w
1
D
2
x
x
Dla ciał o dowolnych własnościach pośrednich można pisać:
Na
uka o własnościach naprężeniowo – odkształceniowych
ośrodków ciągłych nazywa się reologią.
Ciało proste to takie ciało, dla którego zachodzi związek
( )
, , ,
0
Jest to
równanie konstytutywne
wiążące
z
, ,
w sposób odpowiadający
własnościom rozważanego ciała
Wyszukiwarka
Podobne podstrony:
Analiza ekon 08 w2 id 60028 Nieznany
ei 2005 07 08 s085 id 154185 Nieznany
08 Zakladanie i prowadzenie szk Nieznany
08 Zastosowanie programow kompu Nieznany (2)
Dodawanie predkosci id 138890 Nieznany
09 08 Rozdzielnice budowlane RB Nieznany (2)
08 wprowadzenie do programowani Nieznany
ei 2005 07 08 s033 id 154176 Nieznany
2006 08 25 Ustawa o biokomponen Nieznany (2)
08 mleko i nabialid 7454 Nieznany (2)
08 Sporzadzanie ciasta mieszane Nieznany (3)
K 08 SLUP id 229567 Nieznany
08 Stosowanie narzedzi marketin Nieznany (2)
IS wyklad 03 16 10 08 MDW id 22 Nieznany
więcej podobnych podstron