
Wprowadzanie zadanego układu do
programu ROBOT w celu rozwiązania
MP
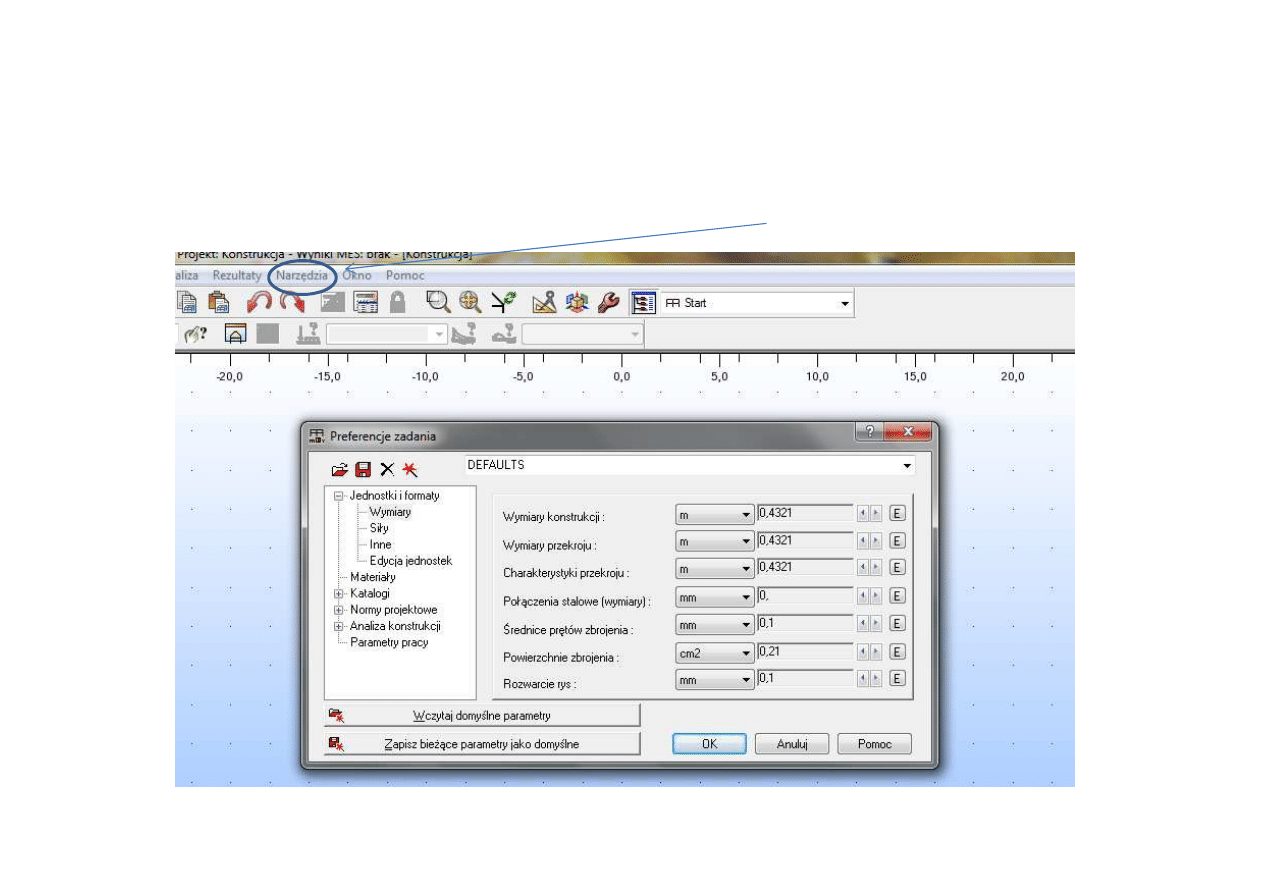
1. Ustawienie preferencji zadania
Narzędzia -> Preferencje zadania
WYMIARY
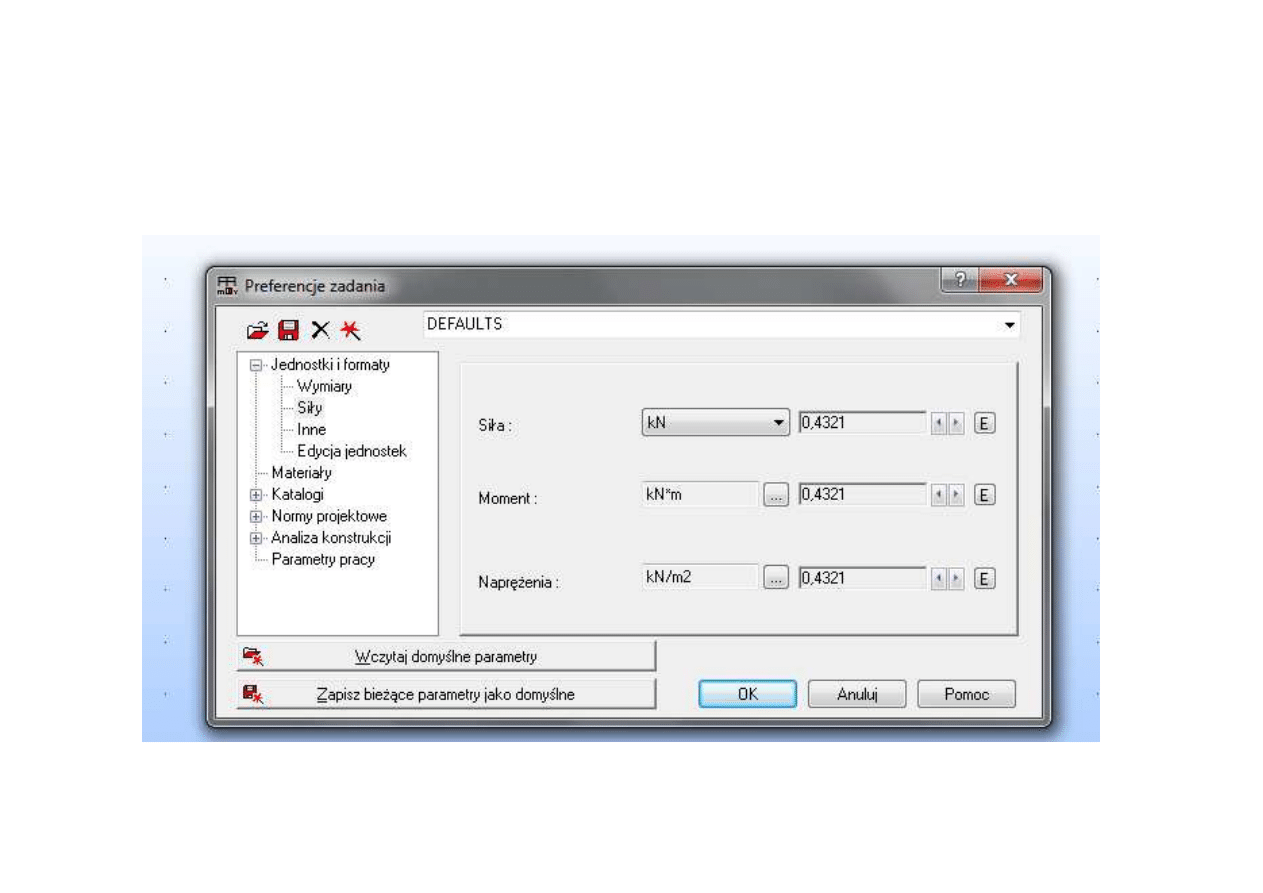
SIŁY
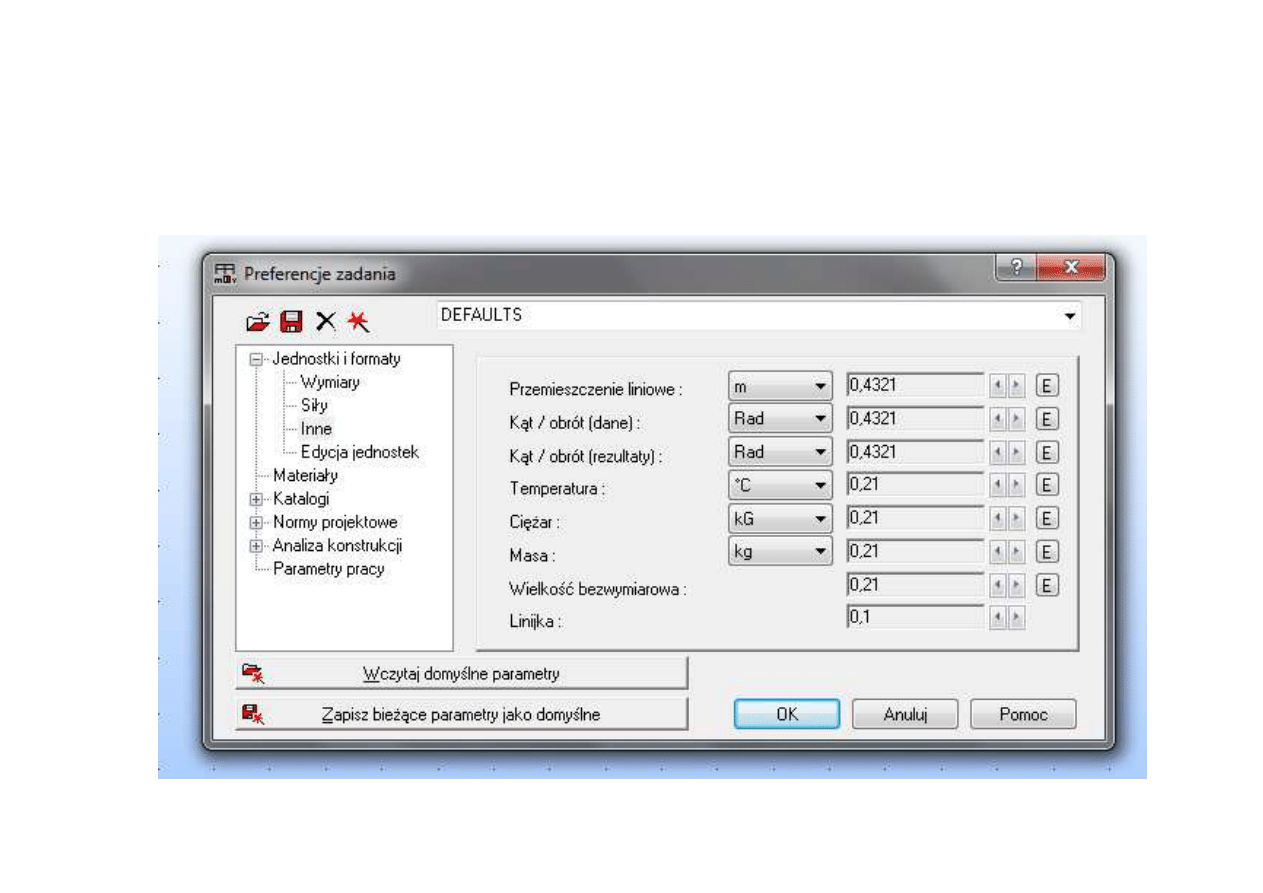
INNE
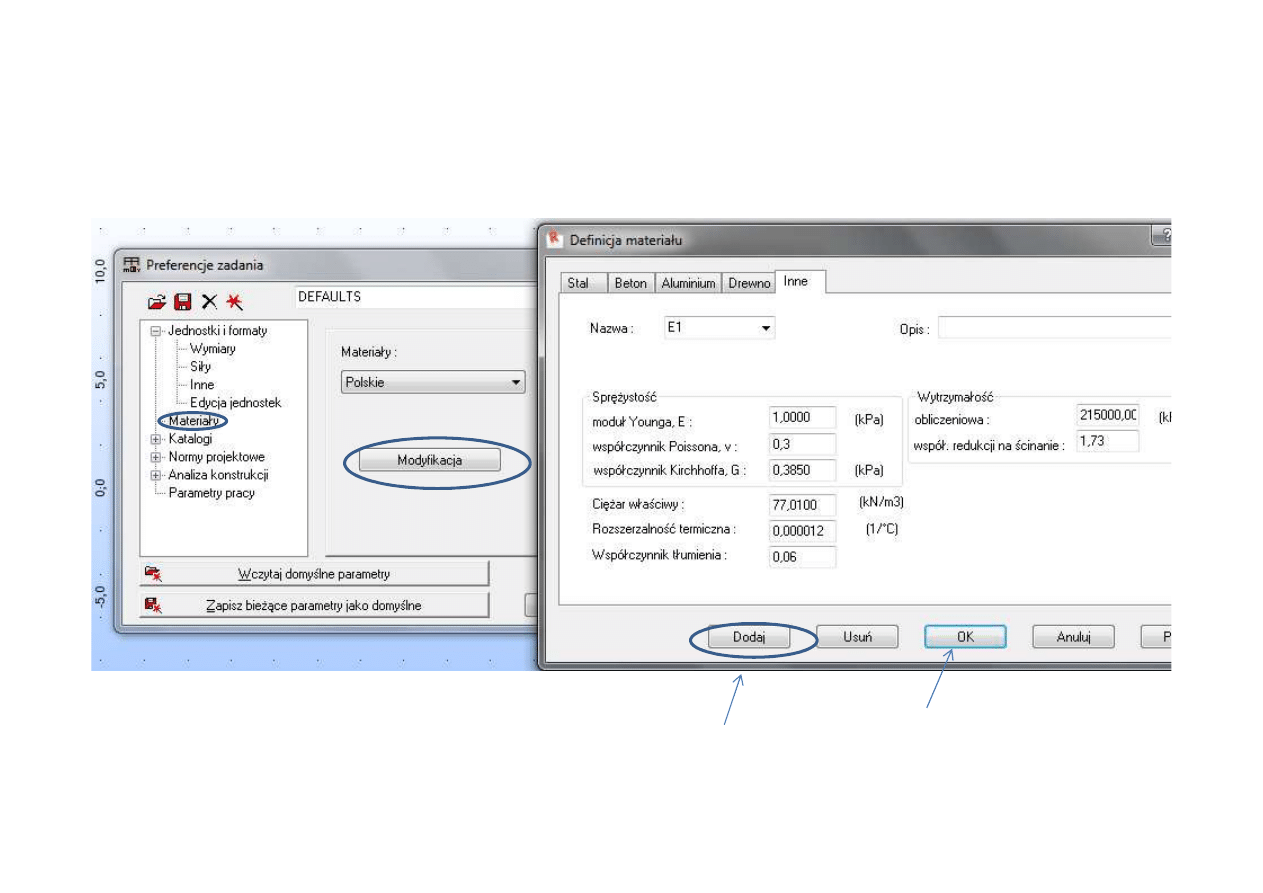
MATERIAŁY
Najpierw należy dodać, a potem kliknąć OK
MOŻNA ZAKONCZYĆ USTALANIE PREFERENCJI KLIKAJĄĆ OK
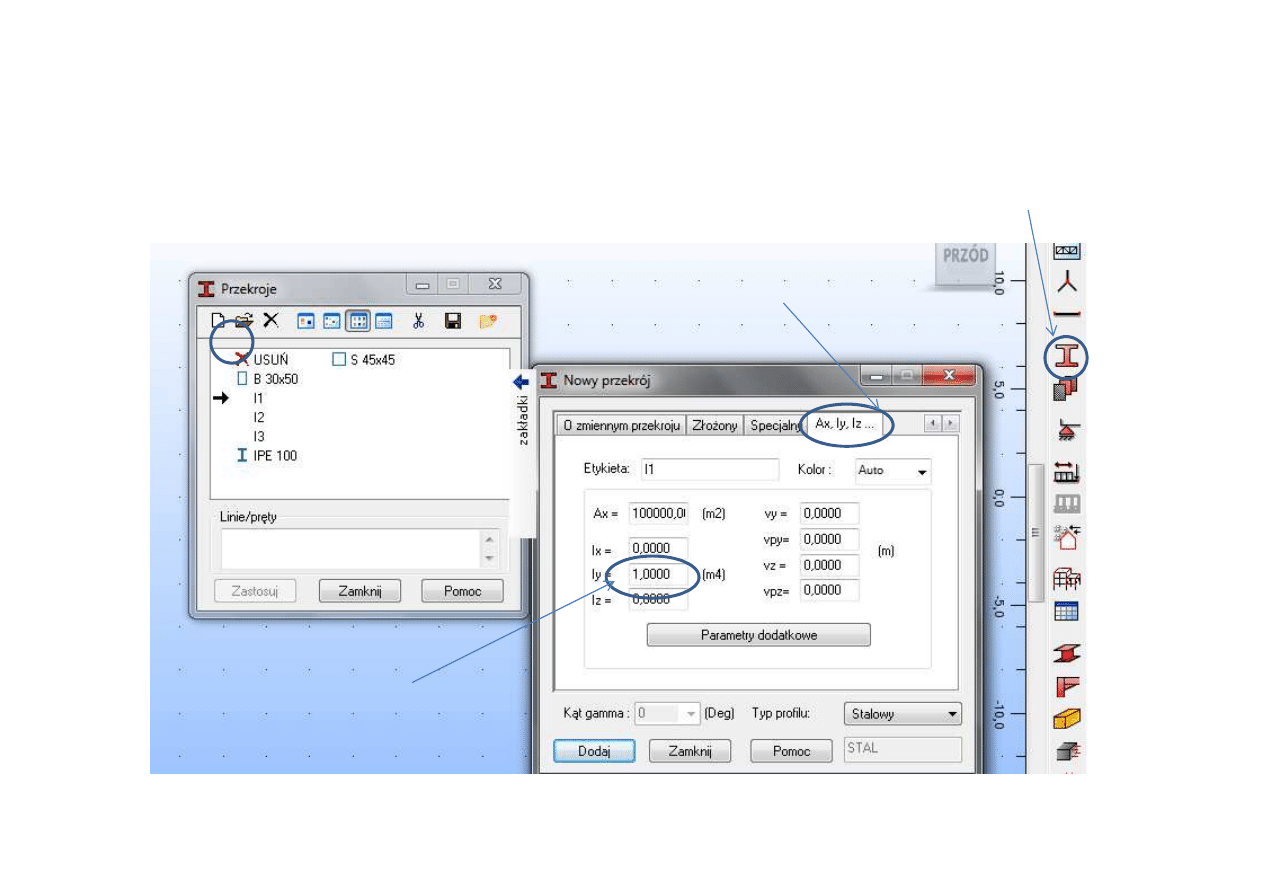
2. Stworzenie przekrojów prętów
1.Wywołanie okna PRZEKROJE
2.Tworzenie nowego przekroju
3.W tym oknie tworzymy
przekroje
4.Zmieniamy Iy jeśli mamy
różne sztywności (np. 2EI,
wówczas Iy=2)
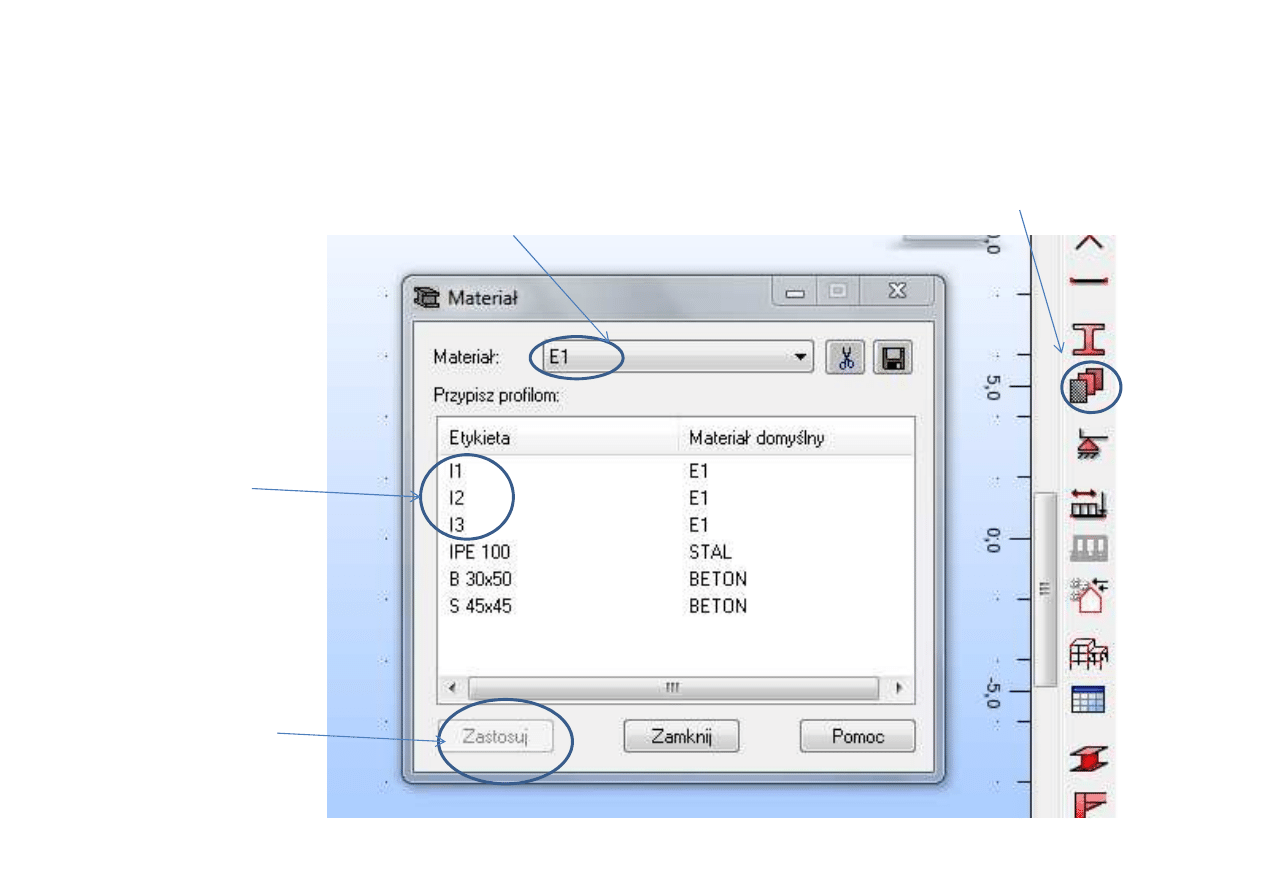
3. Przypisanie materiału do prętów
1.Wywołanie okna
2.Odnalezienie stworzonego w
pkt.1 przekroju
W tym oknie tworzymy
przekroje
3.Zaznaczenie przekroi, dla
których chcemy zmienić
materiał (trzymając Shift)
4.Klikamy zastosuj
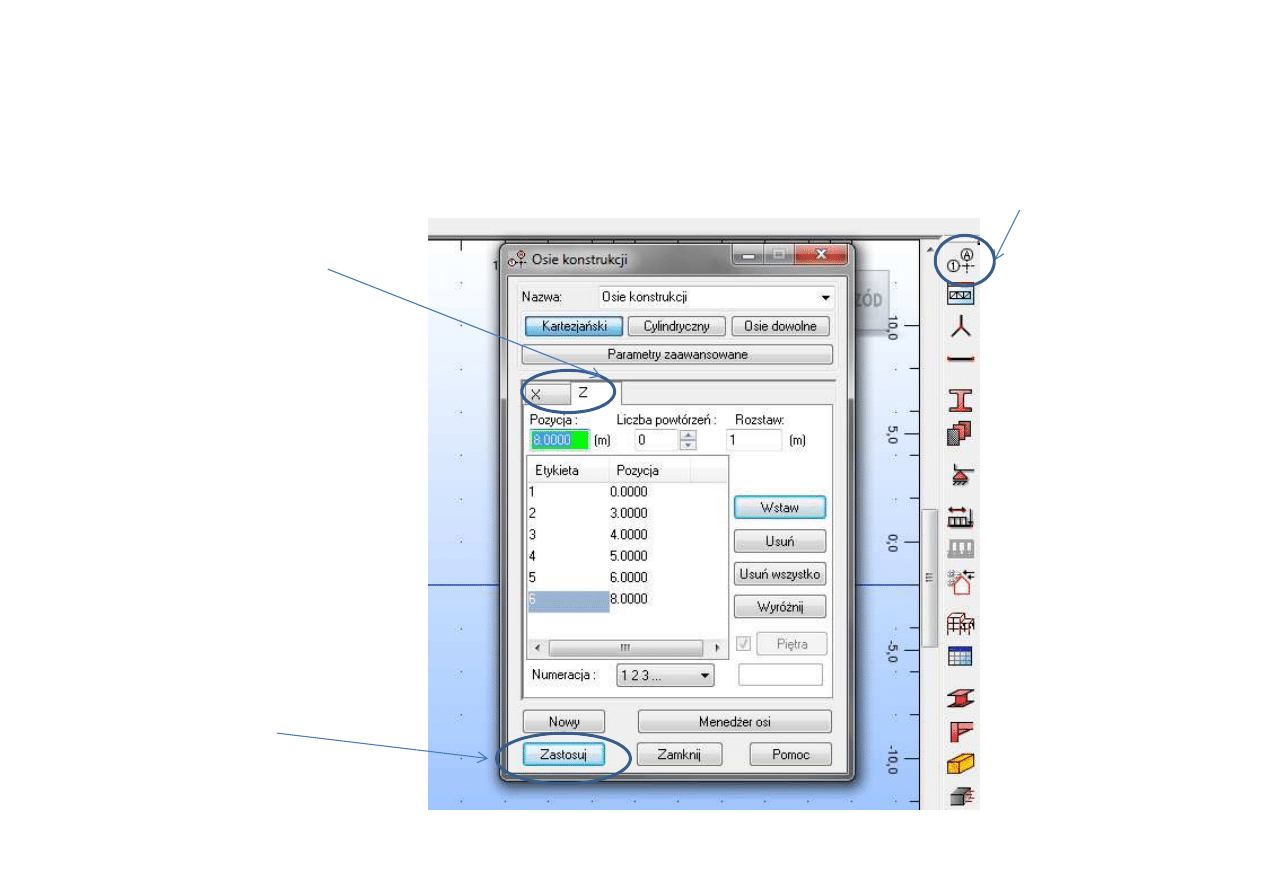
4. Tworzenie osi
1.Wywołanie okna
2.Zdefiniowanie osi w obu
płaszczyznach
3.Klikamy zastosuj i dopiero
potem zamknij
5. Rysowanie układu podstawowego
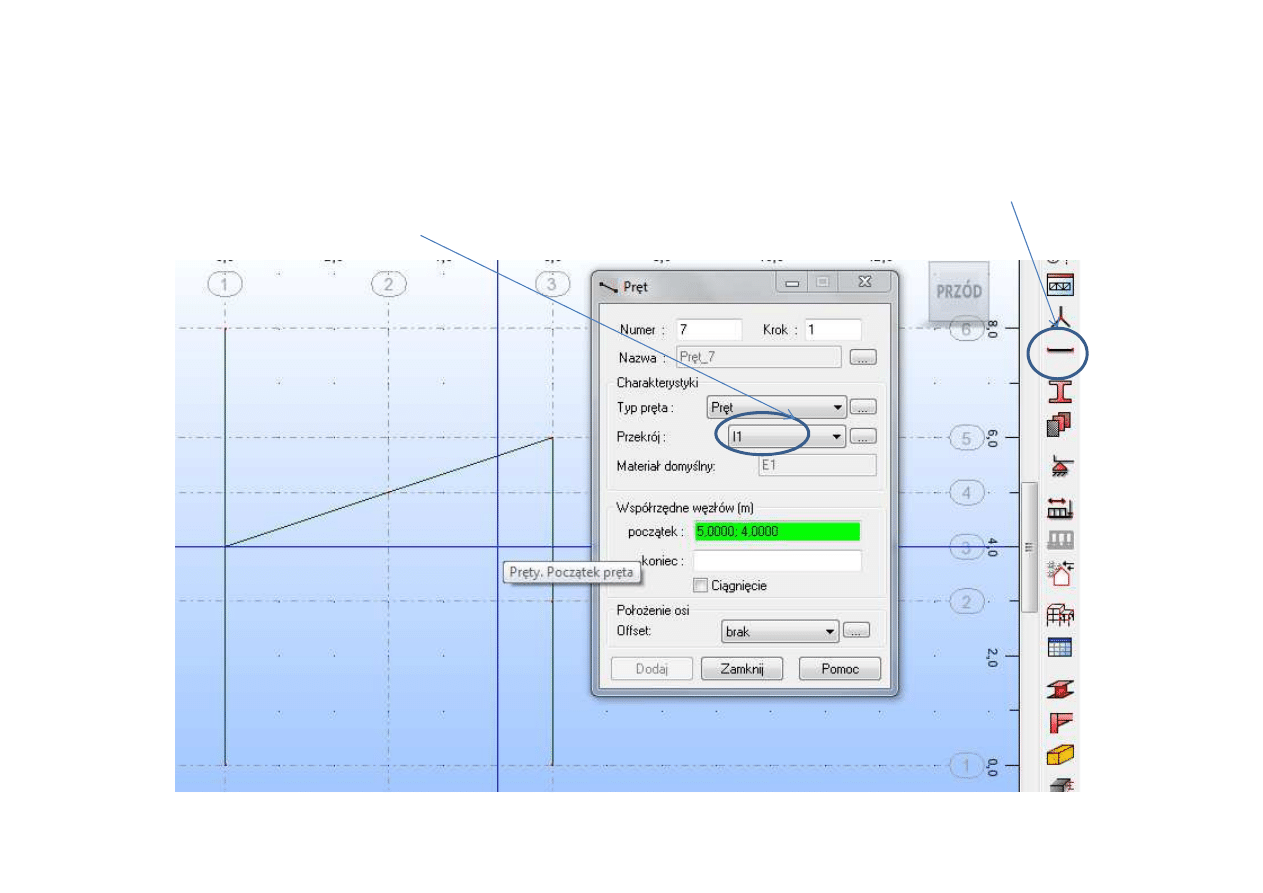
5. Rysowanie układu podstawowego
1.Wywołanie okna
2.Pamiętajcie o zmianie przekroju
w zależności od zadanego typu w
temacie
3.Pierwsze kliknięcie – początek
4. Drugie kliknięcie- koniec
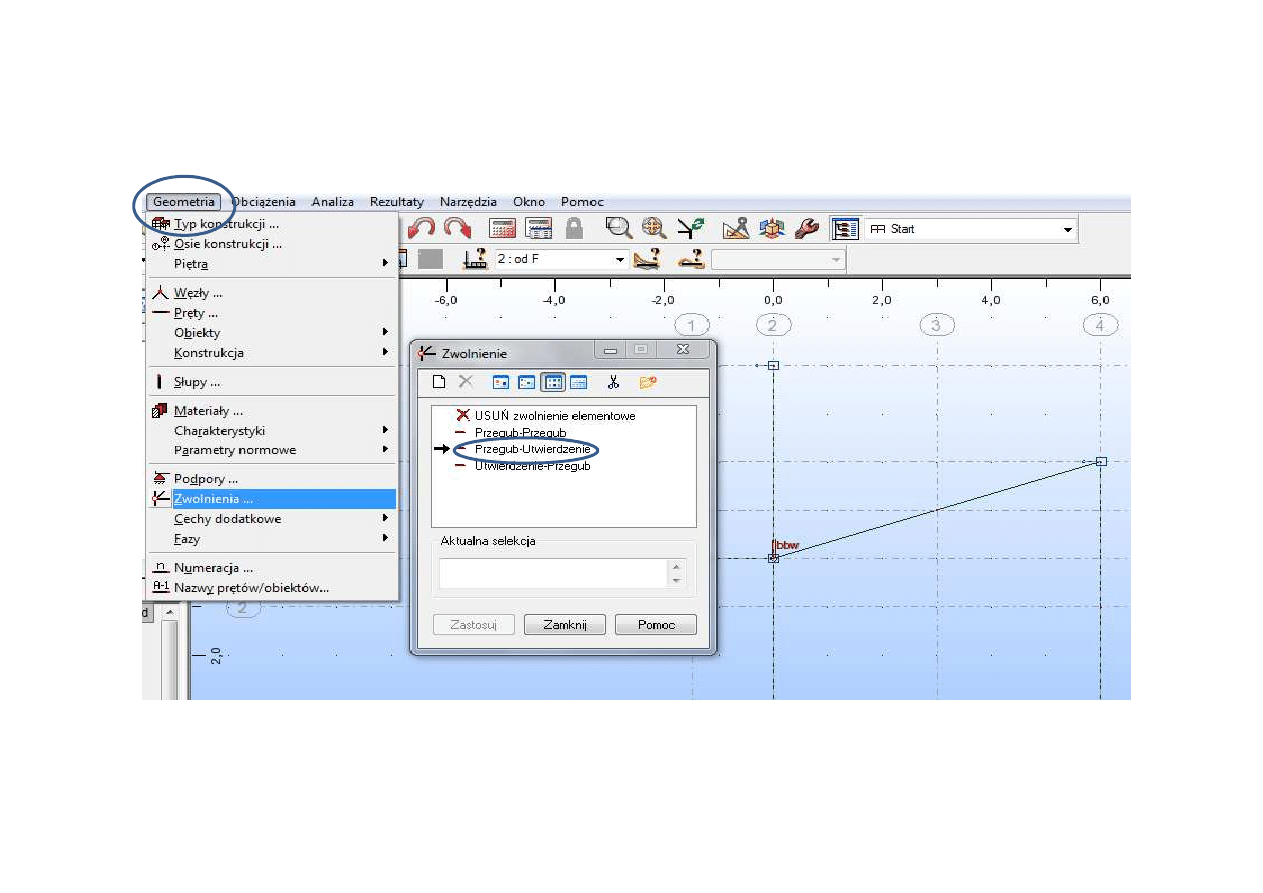
5. Rysowanie układu podstawowego -
przegub
1.Wywołanie okna
Wystarczy tylko na 1 pręcie schodzącym się w węźle zaznaczyć zwolnienie
Należy patrzeć na strzałki jakie pojawią się, gdy będziemy chcieli wstawić zwolnienie, gdyż
one pokazują początek i koniec – początek będzie przegubem, a koniec utwierdzeniem przy
tym założeniu
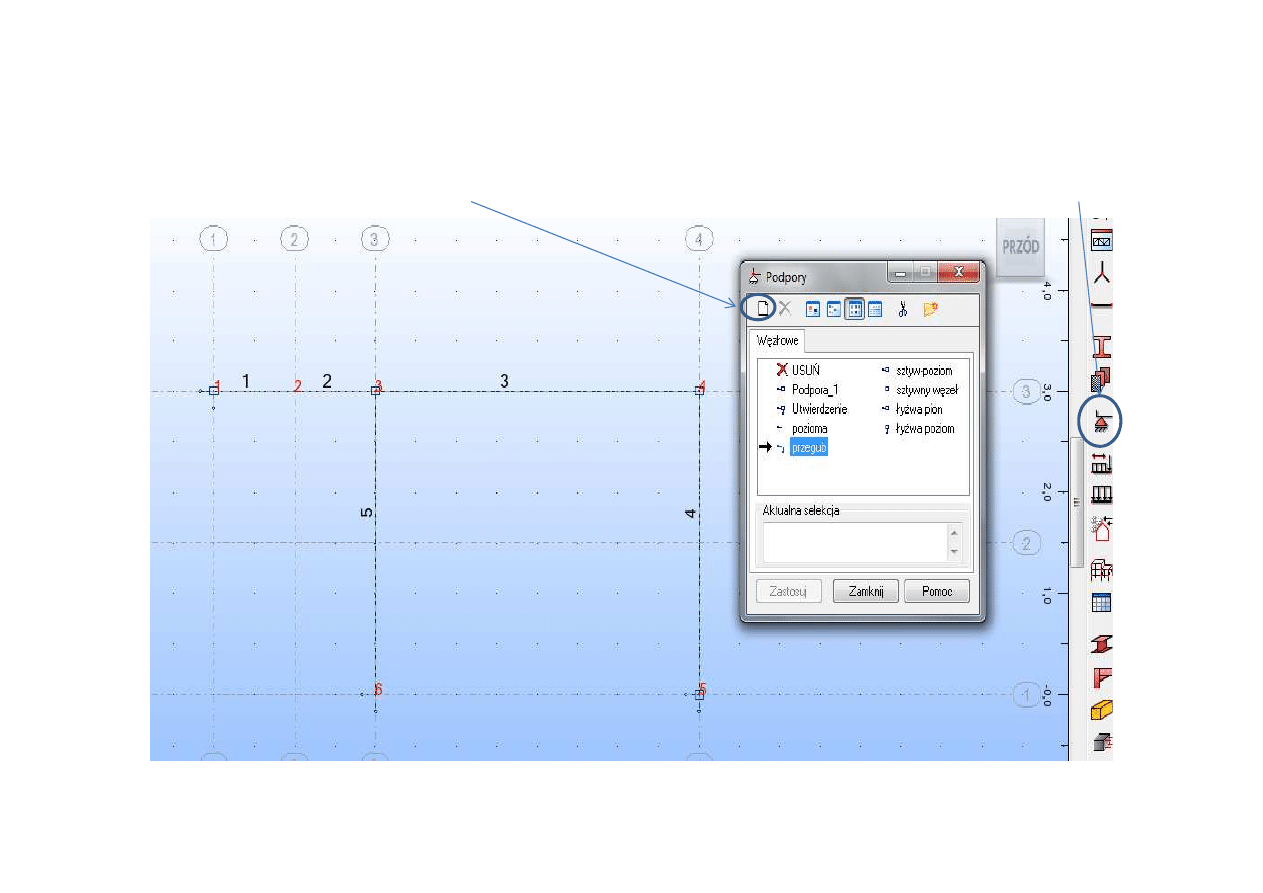
5. Rysowanie układu podstawowego
1.Wywołanie okna
2.Tworzenie nowych podpór
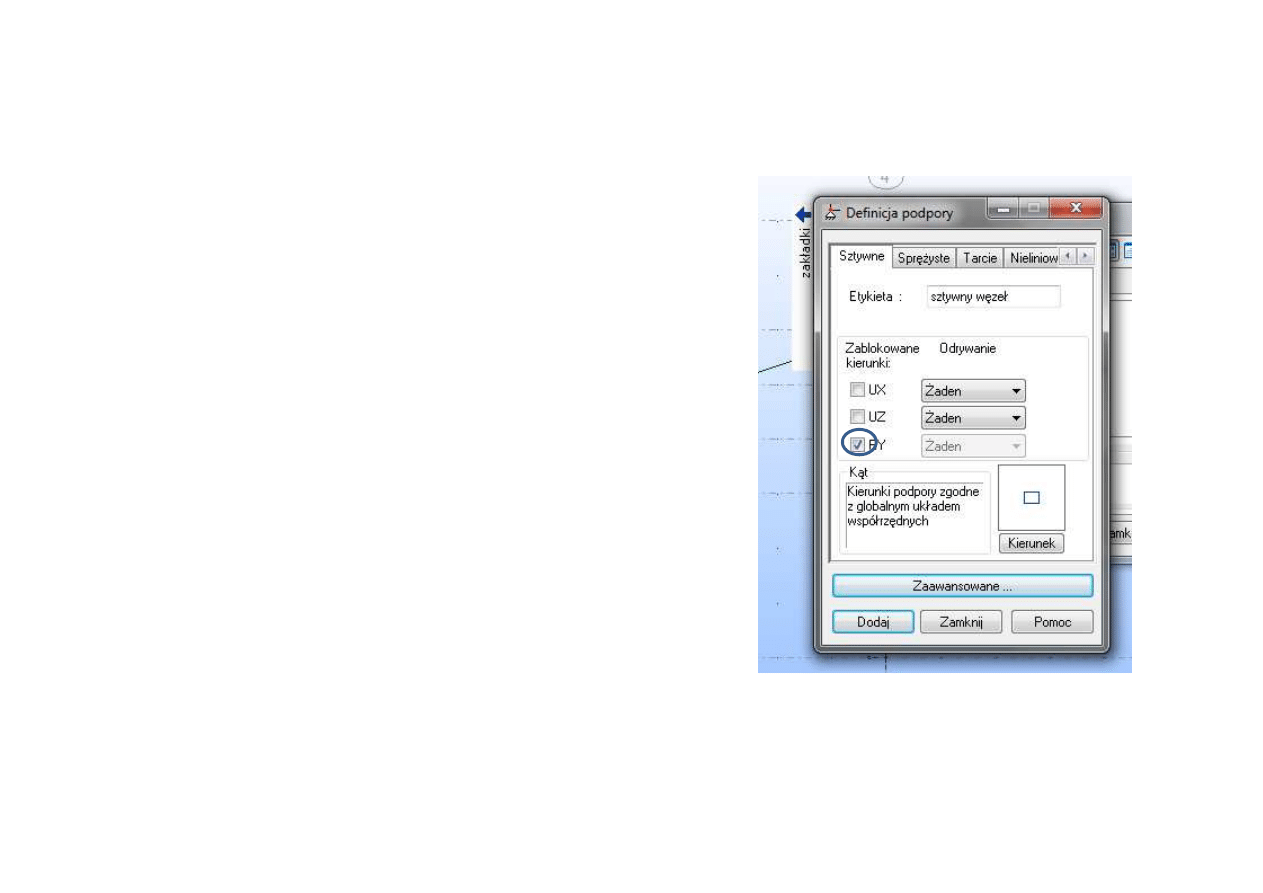
5. Rysowanie układu podstawowego
1. Wstawiając blokadę w węzeł sztywny to tak
jakbyśmy uniemożliwili obrót tego węzła i musimy
wstawić podporę, która blokuje moment
2. Jeśli w węźle jest podpora sprężysta rotacyjna to
niestety nie można jednocześnie zablokować
węzła i pozwolić mu się obrócić więc sprężyny nie
wstawia się, a odczytane wyniki będzie trzeba
zredukować dodając wartość momentu w
sprężynie
3. Jeśli wstawiacie dodatkową więź translacyjną
blokującą przesuw, to do układu podstawowego
też je trzeba wstawić jako podporę blokującą UX
lub UY, w zależności, czy jest to blokada pionowa
czy pozioma
4. Jeśli ktoś ma jednocześnie więź sprężystą i blokuje
w tym miejscu przesuw, to do układu
podstawowego wprowadza blokadę ,a wynik
będzie trzeba zredukować doliczając reakcję tej
sprężyny
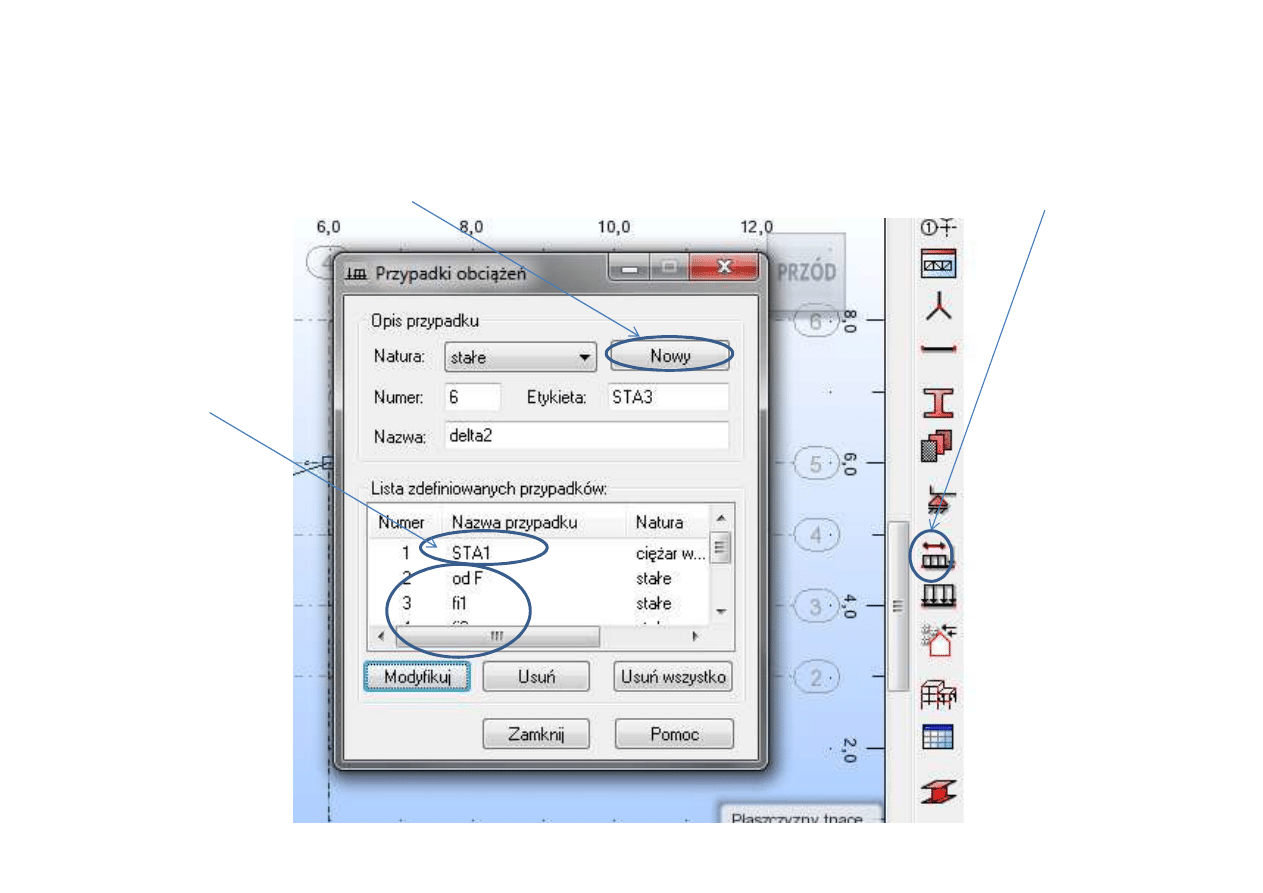
6. Definiowanie Przypadków obciążenia
1.Wywołanie okna
2.Tworzenie nowego typu obciążenia
3.Ciężar własny
dodaje się do 1
obciążenia
dlatego
definicję
obciążeń mamy
od 2-6
4.Wprowadzamy
obciążenie:
Od F
Od Fi1, fi2,
delta1, delta2
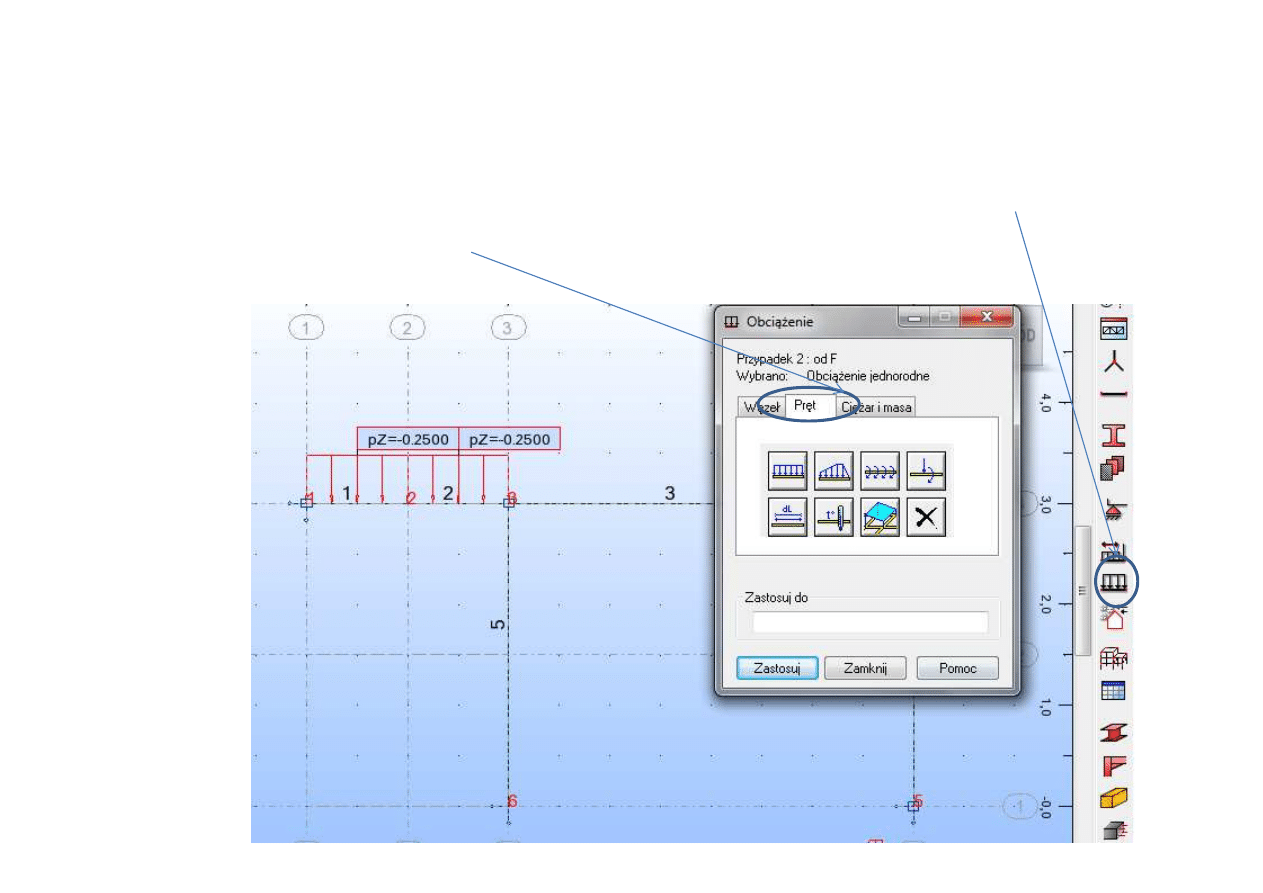
7. Wprowadzanie obciążenia od F
1.Wywołanie okna
2.Wybieramy odpowiednio obciążenie węzłowe dla sił
skupionych i momentów lub obciążenia na pręt dla obc.
Równomiernie rozłożonego
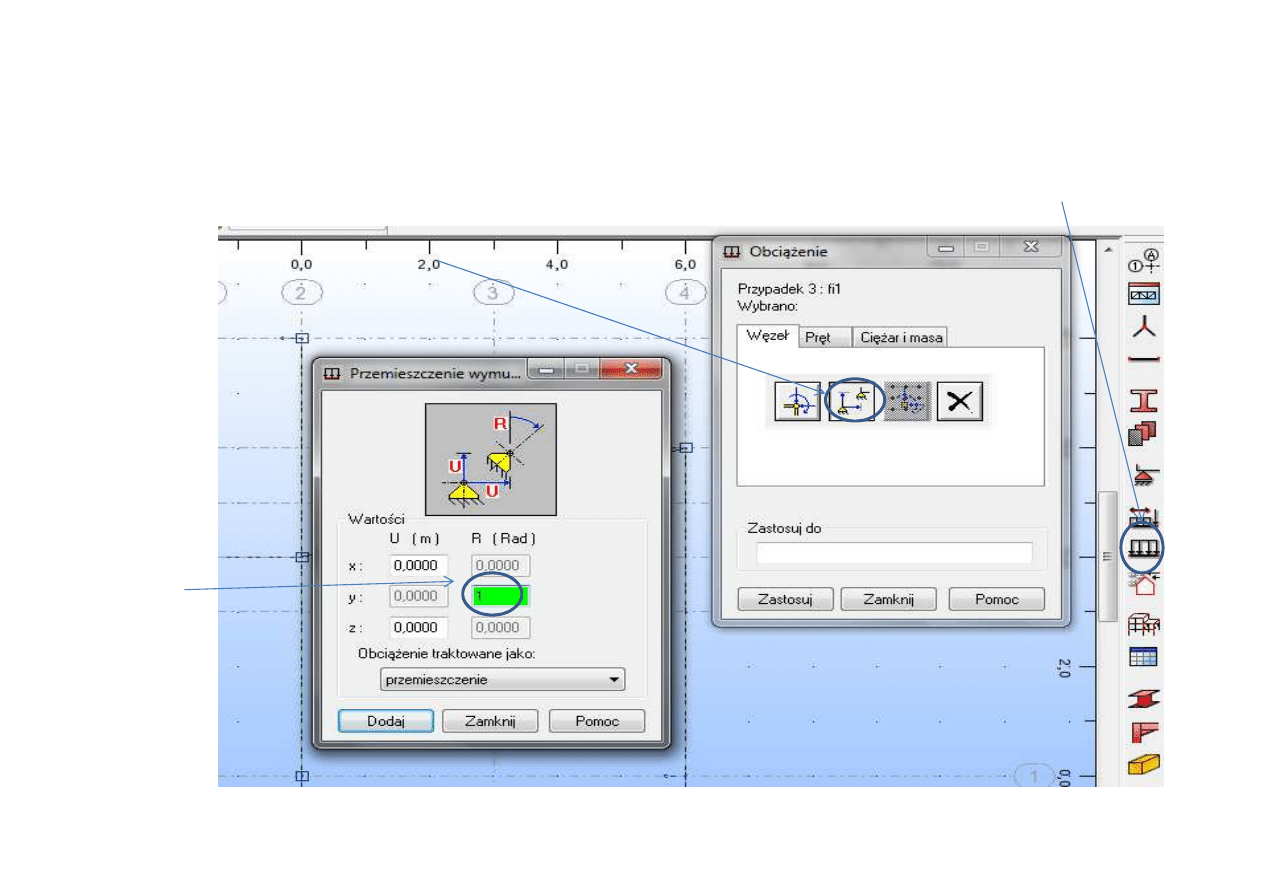
8. Wprowadzanie obciążenia od fi
1. Wywołanie okna
2.Wybieramy odpowiednio obciążenie węzłowe dla
wymuszenia obrotu węzła
Bo
wymuszamy
obrót
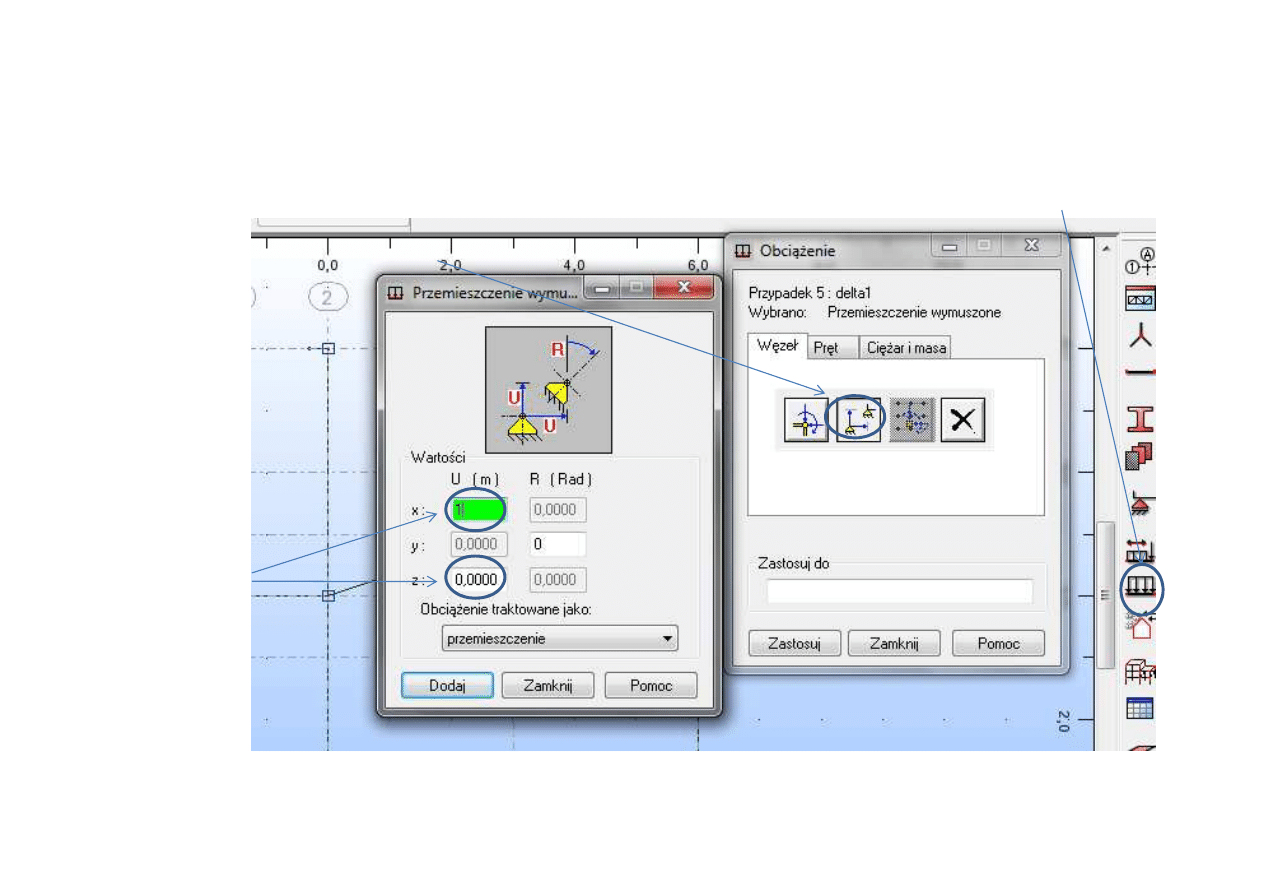
8. Wprowadzanie obciążenia od delta
1.Wywołanie okna
2.Wybieramy odpowiednio obciążenie węzłowe dla
wymuszenia przesuwu węzła
Poziome lub
pionowe
wymuszenie,
zależne od
kierunku
przyłożonej
więzi
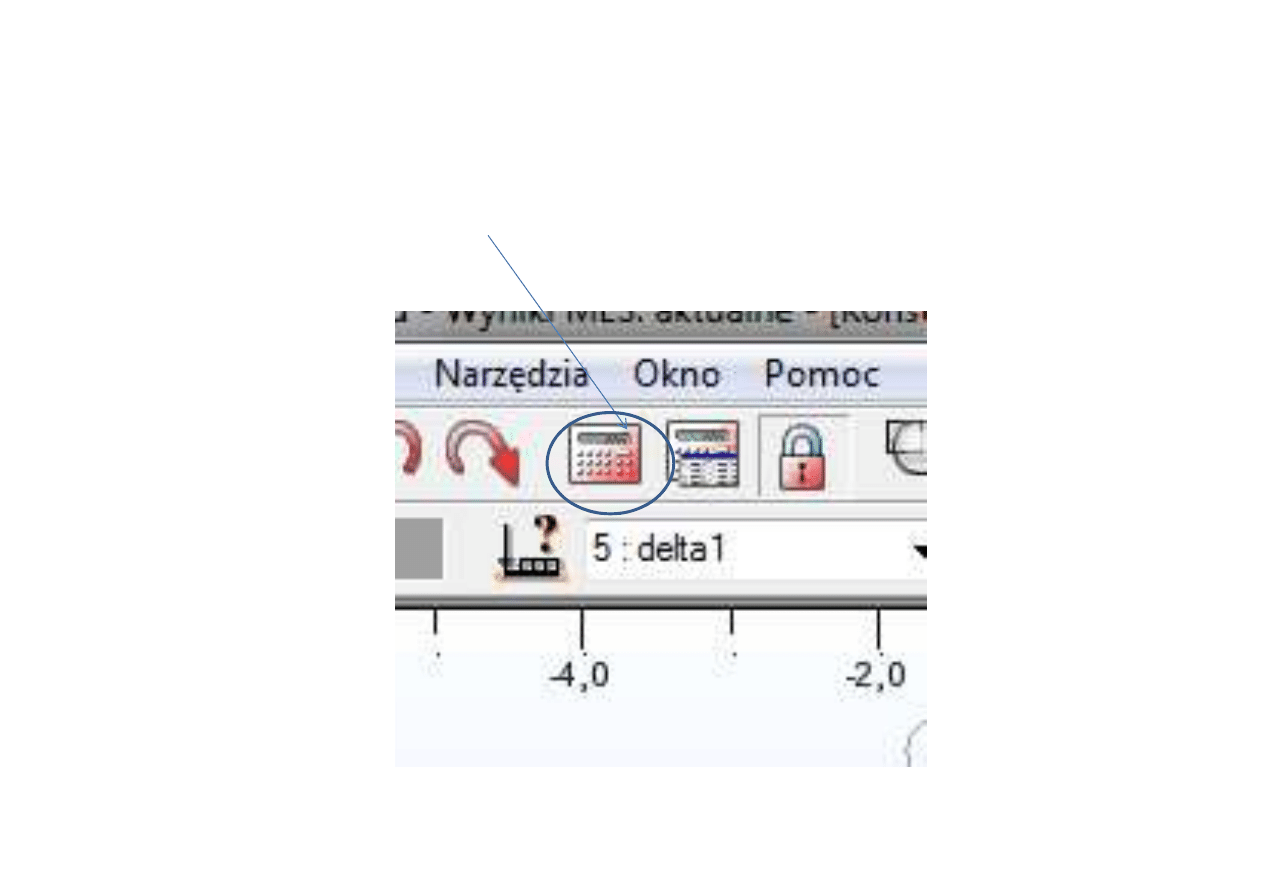
9. Rozwiązanie układu
Klikamy w kalkulator, aby uruchomić obliczenia
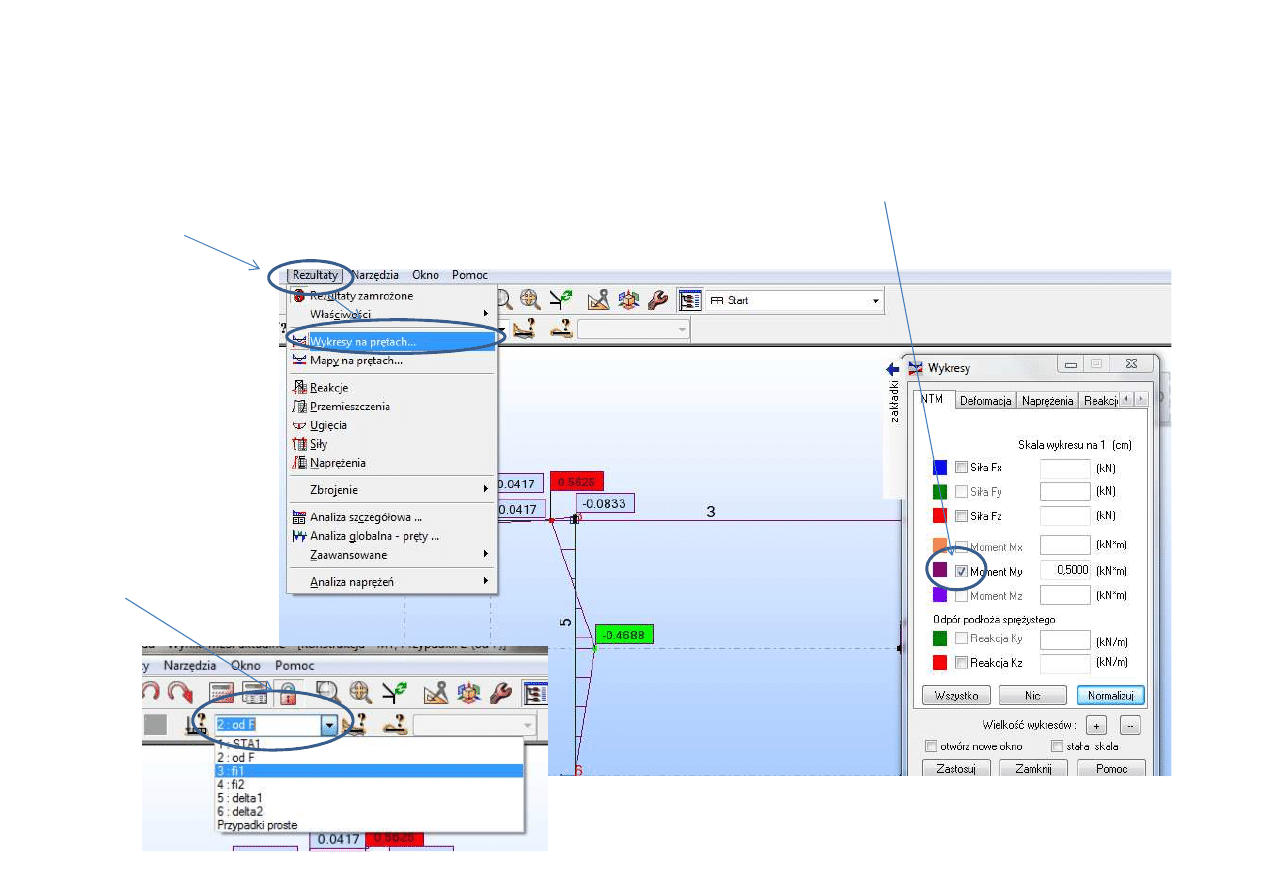
10. Odczytywanie momentów
1.Wywołanie okna
2. Zaznaczamy momenty My, gdy chcemy odczytać
wartości momentów zginających od odpowiedniego
obciążenia
3. Z listy
wybieramy typ
obciążenia dla
którego
odczytujemy
momenty
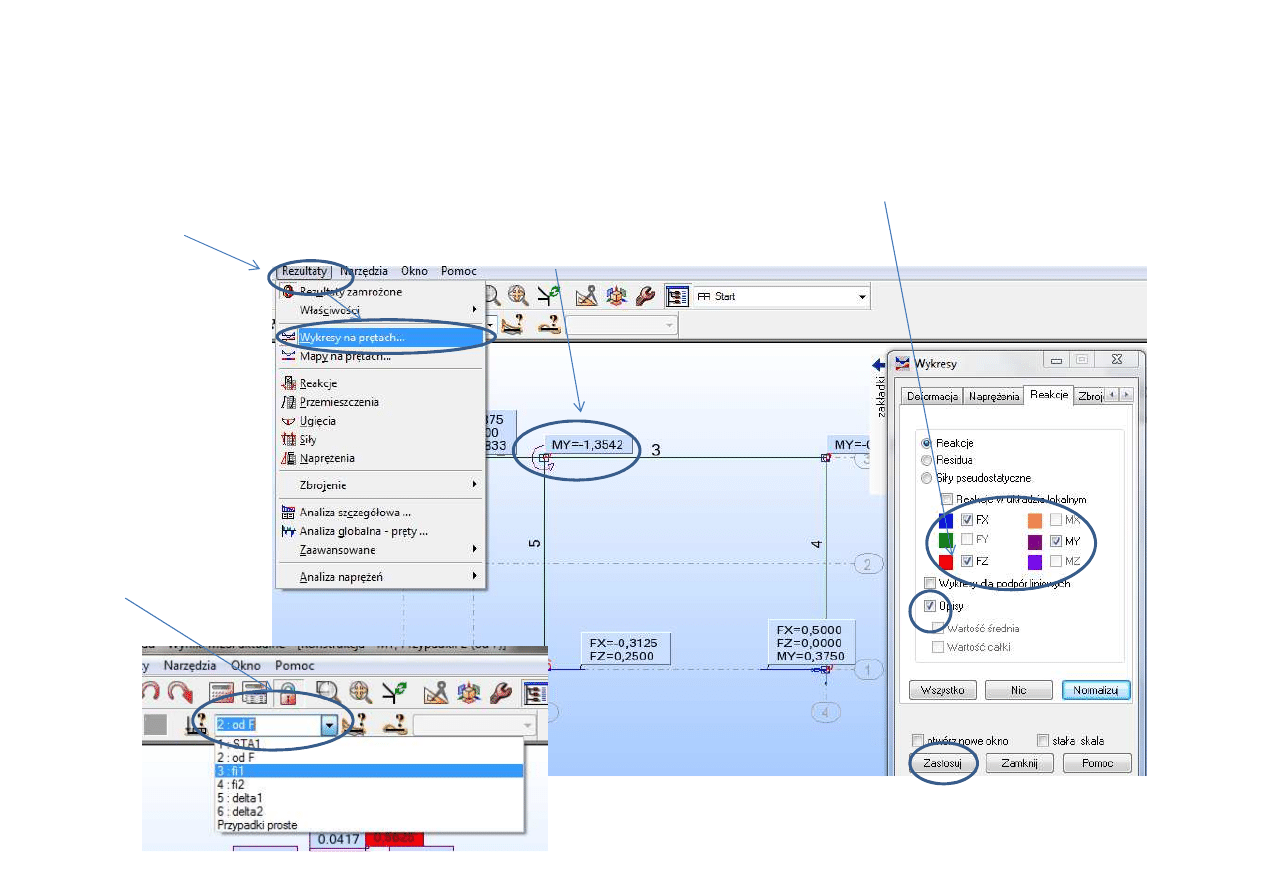
11. Odczytywanie współczynników
1.Wywołanie okna
2. Zaznaczamy wszystkie reakcje i włączamy opisy
3. Z listy
wybieramy typ
obciążenia dla
którego
odczytujemy
momenty
4. Klikamy zastosuj
5. Odczytana reakcja to współczynnik k10 (w węźle 1
od obciążenia zadanego – dlatego moment!)
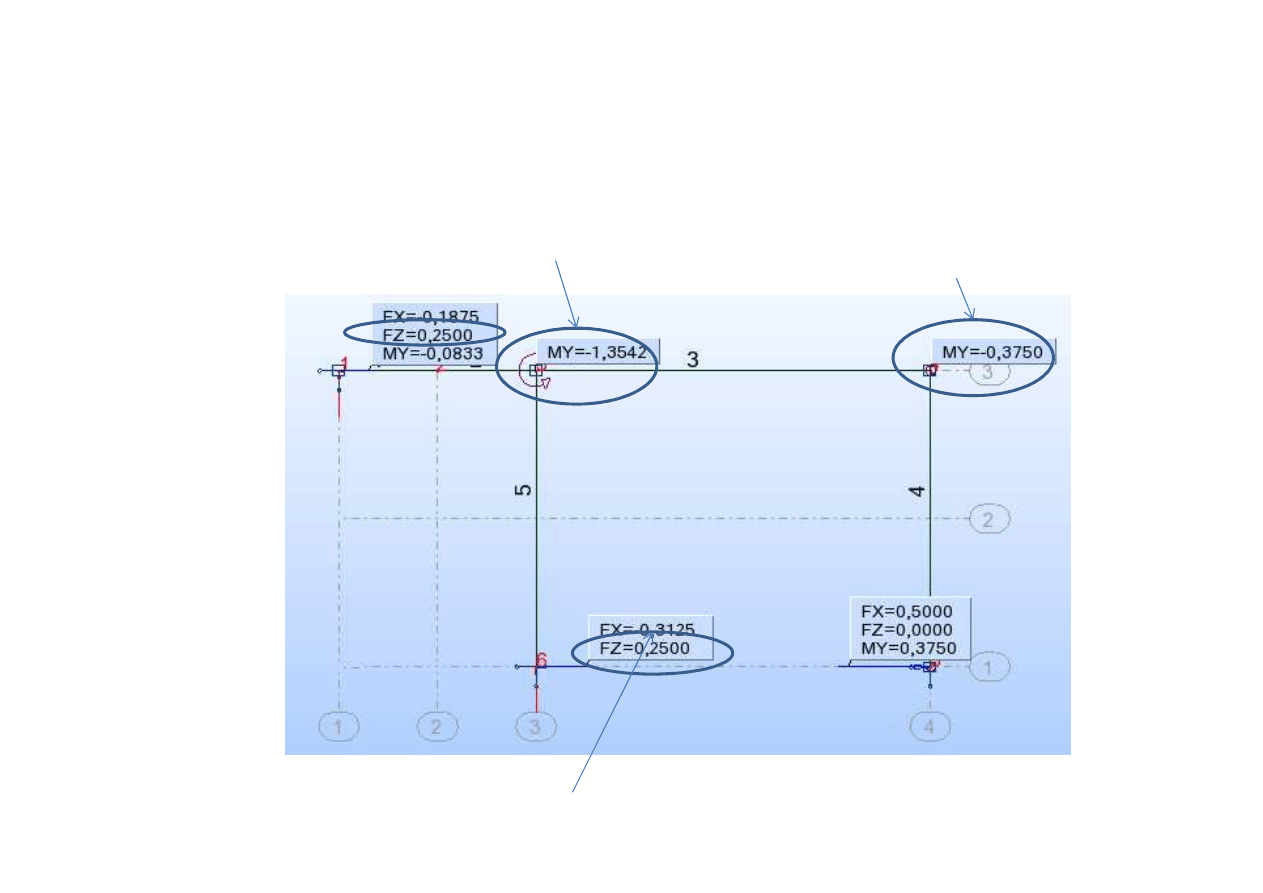
11. Odczytywanie współczynników
Odczytana reakcja to
współczynnik k10 (w węźle 1 od
obciążenia- moment)
Odczytana reakcja to
współczynnik k20 (w węźle 2 od
obciążenia- moment)
Odczytana reakcja to współczynnik kI0 (w miejscu przyłożenia
więzi delta1 od obciążenia- reakcja pionowa, bo taki był kierunek
dołożenia więzi)
Odczytana reakcja
to współczynnik
kII0 (w miejscu
przyłożenia więzi
delta2 od
obciążenia-
reakcja pionowa,
bo taki był
kierunek
dołożenia więzi)
ZNAKI MOGĄ SIĘ RÓŻNIĆ !!!
•
Dla każdego typu obciążenia istnieje możliwość odczytania
współczynników
•
Jeśli w węźle w którym dołożono blokadę obrotową znajduję się więź
sprężysta rotacyjna wówczas do odczytanego wyniku z robota należy ją
dodać, żeby uzyskać ten sam wynik co w obliczeniach
•
Jeżeli na kierunku zablokowanego przesuwu znajdowała się więź sprężysta
translacyjna, to do odczytanego z programu wyniku należy dodać bądź
odjąć wartość kdetla*”odpowiedni przesuw”
11. Odczytywanie współczynników
ϕ

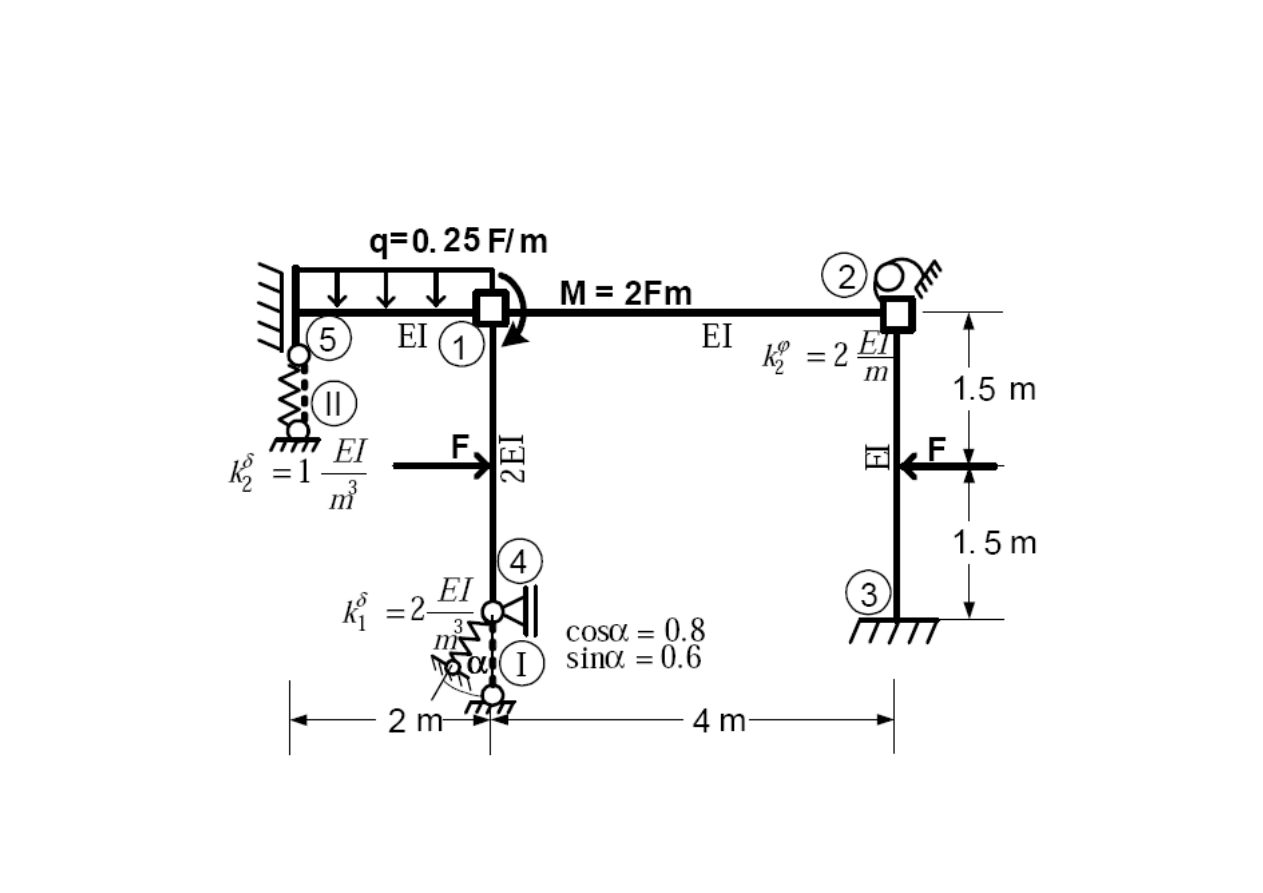
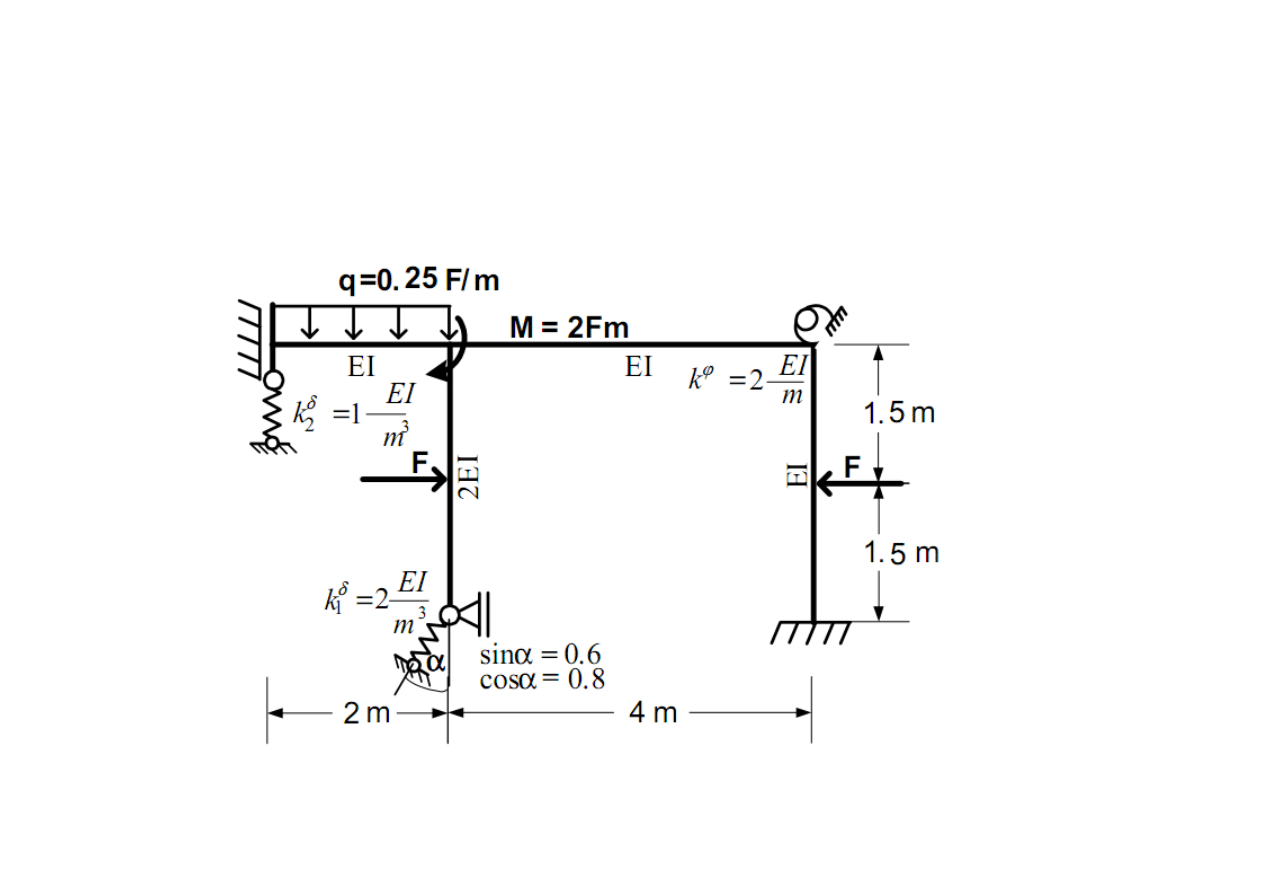
• Otwierając nowy plik proszę o wprowadzenie układu
rzeczywistego, zadanego w temacie ćwiczenia projektowego
postępując analogicznie jak na slajdach: 2-18
• Jedynym przypadkiem obciążenia będzie teraz obciążenie
zadane
• Należy wprowadzić wszystkie więzi sprężyste
12. Wprowadzanie układu
rzeczywistego
12. Wprowadzanie układu
rzeczywistego
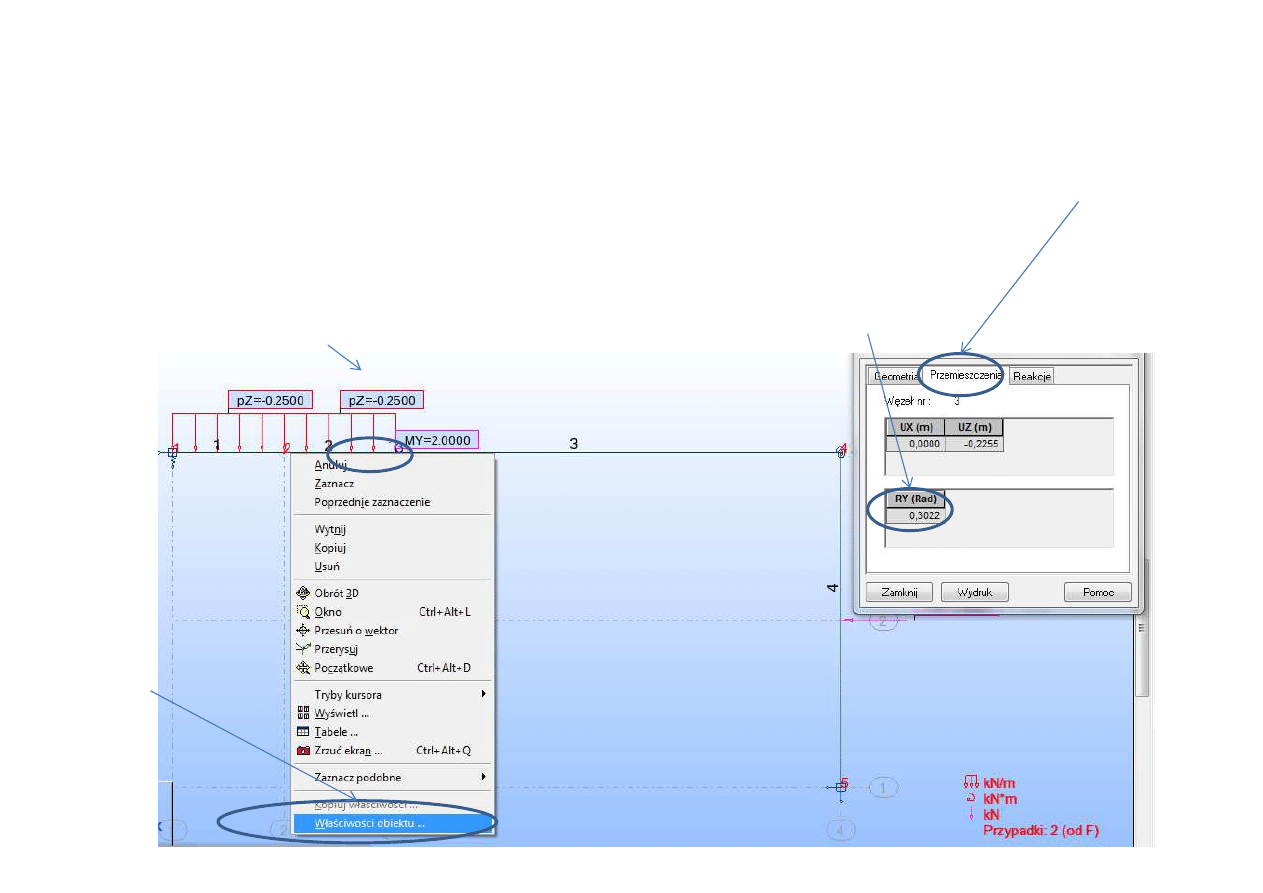
13. Odczytywanie szukanych wielkości
przesuwów i obrotów
1. Klikamy prawym klawiszem myszy w
węźle dla którego chcemy odczytać
wartość szukanej wielkości
3. Otwiera się okno i wybieramy – PRZEMIESZCZENIA,
Następnie jeśli jest to węzeł gdzie dodawaliśmy
blokadę na obrót to odczytujemy RY, w przeciwnym
razie odczytujemy UX lub UY w zależności od
kierunku przyłożenia więzi blokującej
2. Wybieramy
właściwości
obiektu

Koniec
Wyszukiwarka
Podobne podstrony:
Lab MP Turbiny 1 i 2 Instrukcja
6 instrukcja robot kartezjanski Nieznany (2)
instrukcja MP
Sprawozdania z analizy instrumentalnej, MP, Miareczkowanie potencjometryczne
INSTRUMENTY POCHODNE MP cz1 czb
2496,instrukcja obslugi silownika MP
instrukcja filtracyjnej maski przeciwgazowej mp-5, Zajęcia WSOWL, OPBMR
Instrukcja BHP dla robót rozbiórkowych, BHP NA BUDOWIE
Instrukcja R5 Robot 5 osiowy SCORBOT j ang
Instrukcja AEG CS MP 530 R
D19200077 Rozporządzenie Ministra Zdrowia Publicznego w porozumieniu z Ministrem Skarbu i Ministrem
Watson MP3 instrukcja obsługi model mp 3200 17 3400 17 3800 17 pl
więcej podobnych podstron