Piotr Kawalec
Wykład I - 1
TECHNIKA
CYFROWA
(AUTOMATYKA)
Technika cyfrowa
Dr inż. Piotr KAWALEC
Zakład Sterowania Ruchem Drogowym
Wydział Transportu
Politechniki Warszawskiej
ul.Koszykowa 75 p. 327
pka@it.pw.edu.pl
tel. 22-660-7585
Piotr Kawalec
Wykład I - 2
Wykład I
Wprowadzenie
Arytmetyka systemów
cyfrowych
Technika cyfrowa
Piotr Kawalec
Wykład I - 3
Technika cyfrowa
Plan wykładu
Organizacja zajęć
Zakres przedmiotu
Literatura
Struktura układu sterowania
Analogowe i cyfrowe układy sterowania
Pozycyjne systemy liczbowe
Kody stosowane w technice cyfrowej
Zapis liczb względnych
Piotr Kawalec
Wykład I - 4
Technika cyfrowa
Rodzaje zajęć
wykład
egzamin po semestrze VII
;
warunkiem dopuszczenia do egzaminu
jest
zaliczenie ćwiczeń
ćwiczenia audytoryjne
zaliczane na podstawie wyników dwóch
kolokwiów
I kolokwium (po układach
kombinacyjnych)
II kolokwium (w końcu semestru)
możliwość poprawy jednego
kolokwium
Piotr Kawalec
Wykład I - 5
Technika cyfrowa
Zakres przedmiotu
Wprowadzenie
Arytmetyka systemów cyfrowych
Logika układów cyfrowych
Minimalizacja funkcji logicznych
Analiza i synteza układów kombinacyjnych
Synchroniczne układy sekwencyjne
Asynchroniczne układy sekwencyjne
Sposoby zapisu funkcji sterowania
Synteza układów operacyjnych
Synteza układów sterujących
Piotr Kawalec
Wykład I - 6
Technika cyfrowa
Literatura
Traczyk W.:
Układy cyfrowe. Podstawy teoretyczne i metody
syntezy,
WNT, Warszawa, 1982.
Majewski W.:
Układy logiczne
, WNT, Warszawa, 1992.
Misiurewicz P.:
Podstawy techniki cyfrowej,
WNT, Warszawa,
1982
Kruszyński H., Rydzewski A., Śluzek A.:
Teoria układów
cyfrowych,
Wydawnictwa Politechniki Warszawskiej, Warszawa,1991.
Łuba T., B. Zbierzchowski:
Układy mikroprogramowane,
Oficyna
Wydawnicza Politechniki Warszawskiej, Warszawa, 1996.
Łuba T., Jasiński K., Zbierzchowski B.:
Specjalizowane układy
cyfrowe w strukturach PLD i FPGA,
WKŁ, Warszawa,
1997.
Piotr Kawalec
Wykład I - 7
Technika cyfrowa
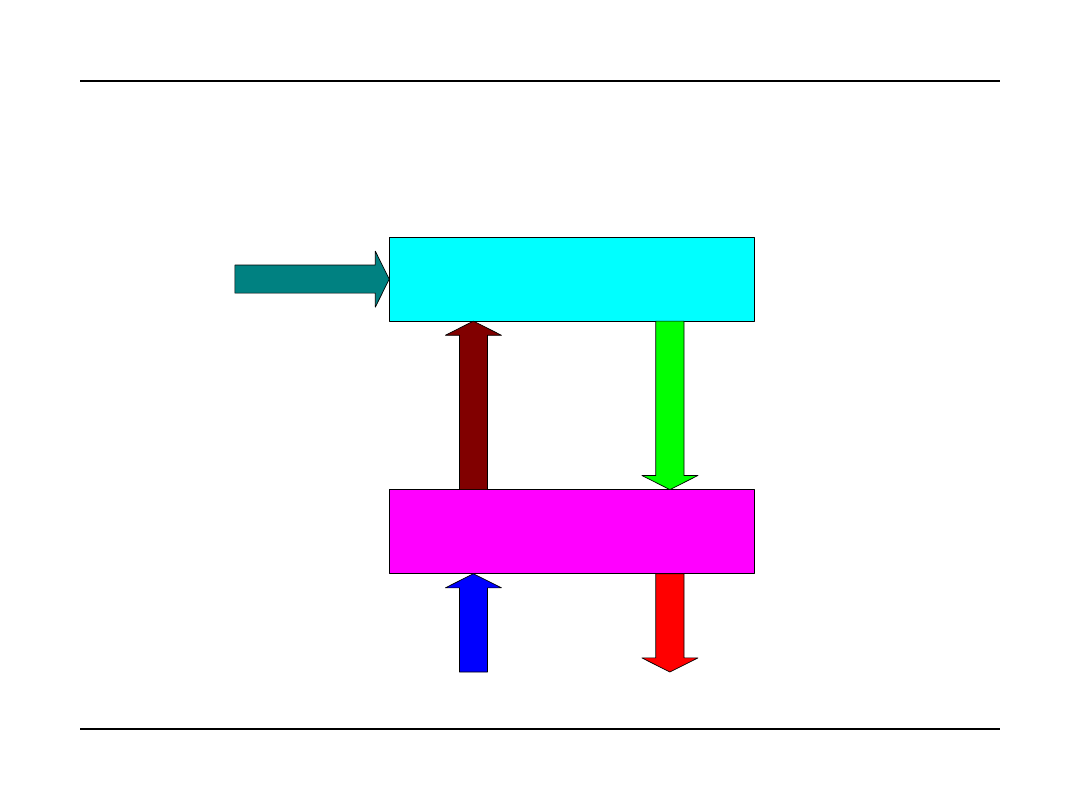
Struktura systemu sterowania
obiekt sterowania
(proces sterowany)
zakłócenia
układy
sterowania
sygnały
sterujące
sygnały
pomiarowe
dane
wejściowe
dane
kontrolne
Piotr Kawalec
Wykład I - 8
Technika cyfrowa
Postacie sygnałów
sygnały analogowe
sygnały dyskretne
W sterowaniu ruchem w transporcie sygnały
mają głównie charakter dyskretny lub wręcz
binarny
Piotr Kawalec
Wykład I - 9
Technika cyfrowa
Zalety stosowania sygnałów
cyfrowych
wysoka odporność na zakłócenia
;
wysokie parametry niezawodnościowe układów
cyfrowych;
łatwość przechowywania danych;
możliwość przetwarzania danych z dowolnie
wysoką dokładnością;
duży wybór układów scalonych wykonanych w
różnych technologiach
niski koszt układów
Piotr Kawalec
Wykład I -
10
Technika cyfrowa
Arytmetyka systemów cyfrowych
pozycyjne systemy liczbowe
;
zamiana systemów liczbowych
;
kody stosowane w technice cyfrowej
;
zapis liczb względnych;
wykonywanie działań arytmetycznych
arytmetyka dwójkowo - dziesiętna
Piotr Kawalec
Wykład I -
11
Technika cyfrowa
Pozycyjne systemy liczbowe
A
(p)
= a
n – 1
p
n – 1
+ ... + a
1
p
1
+a
0
p
0
+ a
– 1
p
– 1
+ ... + a
– m
p
– m
=
gdzie:
a
i
– cyfry systemu, a
i
{ 0,1, ... , p –1 }
p
– podstawa systemu liczbowego, p { 2,3, .... }
n
– ilość cyfr części całkowitej liczby A
m
– ilość cyfr części ułamkowej liczby A.
Zwykle liczbę A w systemie o podstawie p zapisuje
się
w postaci:
A
(p)
= (a
n – 1
a
n – 2
... a
0
,
a
– 1
a
– 2
... a
– m
)
p
Piotr Kawalec
Wykład I -
12
Technika cyfrowa
Rodzaje pozycyjnych systemów
liczbowych stosowanych w technice
cyfrowej
system dwójkowy (binarny)
p = 2; a
i
{ 0,1 }
system ósemkowy (oktalny)
p = 8; a
i
{ 0,1, ... , 7 }
system dziesiętny (decymalny)
p= 10; a
i
{ 0,1, ... , 9}
system szesnastkowy (heksadecymalny)
p = 16; a
i
{ 0,1, ... , 9, A, B, C, D, E, F };
gdzie A= 10; B=11; C=12; D=13; E=14; F = 15
Piotr Kawalec
Wykład I -
13
Technika cyfrowa
Zamiana systemów liczbowych
konwersja dziesiętno - dwójkowa;
konwersja dwójkowo - dziesiętna;
konwersja dziesiętno - szesnastkowa;
konwersja dwójkowo - szesnastkowa;
konwersja szesnastkowo - dwójkowa
Piotr Kawalec
Wykład I -
14
• Konwersja części całkowitej
a
n – 1
a
n – 2
... a
0
: 2
reszta
0 v 1
•
•
•
0
reszta
0 v
1
• Konwersja części ułamkowej
0,
a
– 1
a
– 2
... a
– m
*
2
nadmiar
0 v
1
•
•
•
0
albo zadana
nadmiar
0 v 1
dokładność
Technika cyfrowa
Konwersja dziesiętno - dwójkowa
(a
n – 1
a
n – 2
... a
0
,
a
– 1
a
– 2
... a
–
m
)
D
Piotr Kawalec
Wykład I -
15
Technika cyfrowa
Konwersja dwójkowo - dziesiętna
10011010
,
011011
B
=
=
1*2
7
+ 0*2
6
+ 0*2
5
+ 1*2
4
+
1*2
3
+ 0*2
2
+
1*2
1
+ 0*2
0
+
+ 0*2
-1
+ 1*2
-2
+ 1*2
-3
+ 0*2
-4
+ 1*2
-5
+ 1*2
-6
=
=
1*2
7
+ 1*2
4
+
1*2
3
+ 1*2
1
+
1*2
-2
+ 1*2
-3
+
1*2
-5
+ 1*2
-6
=
=
128
+ 16
+
8 + 2 +
1/4
+ 1/8
+
1/32
+ 1/64
=
=
154
,
421875
D
Piotr Kawalec
Wykład I -
16
• Konwersja części
całkowitej
a
n – 1
a
n – 2
... a
0
: 16
reszta
•
•
•
0
reszta
• Konwersja części ułamkowej
0,
a
– 1
a
– 2
... a
– m
*
16
nadmiar
•
•
•
0
albo zadana
nadmiar
dokładność
Technika cyfrowa
Konwersja dziesiętno - szesnastkowa
(a
n – 1
a
n – 2
... a
0
,
a
– 1
a
– 2
... a
–
m
)
D
Piotr Kawalec
Wykład I -
17
Technika cyfrowa
Konwersja szesnastkowo - dziesiętna
A0F5C
,
D50B
H
=
=
10*16
4
+ 0*16
3
+ 15*16
2
+ 5*16
1
+ 12*16
0
+
+ 13*16
-1
+ 5*16
-2
+ 0*16
-3
+ 11*16
-4
=
=
10*65536
+15*256
+5*16 +12 +
13/16
+5/256
+11/65536=
=
655360 + 3840 + 80 +12 +
0,8125 +
0,01953125 +
+ 0,0001678466796875 =
=
659292
,
83219
90966796875
D
Piotr Kawalec
Wykład I -
18
Technika cyfrowa
Konwersja dwójkowo - szesnastkowa
000
10011101101101010
,
0111111
011
00
B
=
1 3 B 6 A
,
7 E
C
H
Piotr Kawalec
Wykład I -
19
Technika cyfrowa
Konwersja szesnastkowo - dwójkowa
A 0 F 5 C
,
D 5
0 B
H
=
=
1010 0000 1111 0101 1100
,
1101 0101 0000 1011
B
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
Wyszukiwarka
Podobne podstrony:
Wykład II Arytmetyka systemów cyfrowych cd
Technika cyfrowa Wykład II, Arytmetyka systemów cyfrowych cd
Wykład III Logika systemów cyfrowych synteza układów kombinacyjnych
Wykład III Logika systemów cyfrowych synteza układów kombinacyjnych
wyklad1 Informacja systeminformacyjny
Podstawy Informatyki Wykład V Struktury systemów komputerowych
Wykład V Podejście systemowe do budowy strategii
WYKŁAD1I2Rachunkowość jako system ewidencji gospodarczej (1)
Wykład 3 Pieniądz i system pieniężny w gospodarce
LAB 7 Systemy cyfrowe Modulacja Demodulacja FSK PSK ASK student
Wykład 5 - Miejskie systemy ciepłownicze, Suszanowicz
Ekologiczne Systemy Chowu i Żywienia Zwierząt - Wykład 01, WYKŁAD I- EKOLOGICZNE SYSTEMY CHOWU I ZYW
systemy logistyczne, wykład4, Przedmiot: SYSTEMY LOGISTYCZNE
PREZYDENT, Prawo UMK notatki, Prawo - cały I rok, SEMESTR II, PRAWO KONSTYTUCYJNE-WYKŁAD, Konstytucy
Wyklad2 Modele systemów informatycznych zarządzania
Wykład 10 Regulatory cyfrowe (2013)
Wykłady (15) Metody cyfrowe
więcej podobnych podstron