Biomechanika
Równowaga ciała ludzkiego i jego stabilność

Równowaga ciała ludzkiego
• Równowaga to pewien określony stan układu
posturalnego charakteryzujący się pionową
orientacją ciała osiągniętą dzięki zrównoważeniu
działających na ciało sił oraz ich momentów.
• Równowaga ciała ludzkiego w pozycji stojącej
wymaga precyzyjnej i skoordynowanej kontroli
nerwowej oraz prawidłowej czynności wielu
struktur układu nerwowego.
• Na zachowanie równowagi w pozycji siedzącej
duży wpływ ma ułożenie ciała oraz grawitacja.
Inne czynniki takie jak tarcie, środek ciężkości i
temperatura także wpływają na pozycję siedzącą.

Równowaga to umiejętność utrzymania pozycji
ciała w różnych zróżnicowanych warunkach
wykonywania różnorodnych ruchów lub
utrzymania pozycji statycznej.
Równowagę dzielimy na statyczna i dynamiczną.
Statyczna to taka w której utrzymujemy pozycje
ciała w miejscu - postawa zasadnicza, stanie
stanie jednonóż, waga przodem, STANIE NA
RĘKACH, stanie na głowie itp.
Równowaga dynamiczna występuje w trakcie
wykonywania różnorodnych ćwiczeń, gdy ciało
znajduje się w ruchu - marsze, biegi, skoki, rzuty,
wahania, ćwiczenia na przyrządach, ćwiczenia
wolne itp.

Warunki zachowania
równowagi:
- zrównoważenie wszystkich sił zewnętrznych.
- suma momentów wszystkich sił
- zachowana równowaga momentów sił
- wielkości powierzchni podstawy (podparcia)
- Wysokość usytułowania ogólnego środka
ciężkości (OSC)
- wielkość kąta równowagi lub stabilności

Podstawowym warunkiem zapewnienia
równowagi mechanicznej jest to, aby środki
ciężkości poszczególnych segmentów- głowy,
klatki piersiowej, miednicy- równoważyły się w
ramach równoważenia całości. Jeżeli tylko jeden
segment przemieści swój środek ciężkości, ogólna
równowaga ulega zaburzeniu powodując
kompensacyjne przemieszczenie innych
segmentów, najczęściej przez wygięcie krzywizn
kręgosłupa, pochylenie miednicy czy ustawienia
kończyn.

Zasady dynamiki Newtona, zwane też
prawami ruchu wpływają na równowagę ciała
oraz jego stabilność
Trzy prawa leżące u podstaw mechaniki
klasycznej zostały sformułowane przez Isaaca
Newtona i opublikowane w Philosophiae
Naturalis Principia Mathematica w 1687 roku.
W mechanice kwantowej nie mają zastosowania, w
mechanice relatywistywistycznej obowiązują w
ograniczonym zakresie.
Ruch ciała ludzkiego (lokomocja) jest szczególnym
przypadkiem mechaniki podlegającym działaniu
tych samych praw fizycznych.

I Zasada Dynamiki (zasada
bezwładności)
Jeżeli na ciało nie działa żadna siła lub działające
siły równoważą się, to ciało pozostaje w
spoczynku lub porusza się ruchem
jednostajnym prostoliniowym ( po prostej
ze stałą prędkością),
czyli ciało pozostaje w stanie równowagi.
O takim ruchu mówimy czasem jako o ruchu swobodnym.
Dotyczy to układów odniesienia nazywanych układami
inercjalnymi.

II Zasada Dynamiki
Jeżeli na ciało działa niezrównoważona siła
zewnętrzna F (pochodząca od innego ciała),
to ciało to porusza się ruchem zmiennym,
a siła F działająca na ciało nadaje mu
przyspieszenie (akcelerację) a , które jest
odwrotnie
proporcjonalne do masy ciała m:
a = F ∕ m [N]
Sformułowanie oryginalne
:
’’Zmiana ruchu jest proporcjonalna do przyłożonej siły poruszającej i
odbywa się w kierunku prostej, wzdłuż której siła jest przyłożona.’’

Zatem masa ciała jest czystą ilościową kategorią,
gdyż:
m = F ∕ a [kg]
Masa jakiegokolwiek ciała w warunkach ziemskich nie zmienia się. Jest to
przyspieszenie, jakie siła nadaje masie, gdy wprowadza ją w ruch, który
określa stopień siły
F = a • m
Zastosowanie tej prawidłowości do warunków ziemskich pozwala stwierdzić,
że siła jest dana przez ciężar (wagę) ciała, czyli jest iloczynem
przyspieszenia ziemskiego g = 9,81 [m ∕ s]² i masy ciała.
Ciała niebieskie, księżyc, planety mają swoje własne przyspieszenia grawitacyjne, różne od
ziemskiego. Zatem ciało o tej samej masie będzie miało różny ciężar na każdym tych ciał
niebieskich.

III Zasada Dynamiki
Jeżeli ciało A działa na ciało B siłą F (akcja), to ciało B działa na
ciało A siłą F (reakcja) o takiej samej wartości i kierunku, lecz o
przeciwnym zwrocie
W wersji skróconej: każdej akcji towarzyszy reakcja równa co do wartości i
przeciwnie skierowana.
W wersji oryginalnej:
Względem każdego działania istnieje przeciwdziałanie skierowane przeciwnie i równe, to jest wzajemne
działania dwóch ciał są zawsze równe i skierowane przeciwnie.
Zastosowaniem tego prawa jest określenie ciężaru ciała, czyli ciężar ciała pozostaje w
równowadze, jeżeli działająca na niego siła napotyka na reakcję (przeciwną siłę) o tej
samej wielkości a przeciwnie skierowaną.

Ciężar umieszczony na wadze znajduje się pod wpływem
działania reakcji, a punkt w którym ciężar i reakcja stają się
równe grawitacji wskazuje na ciężar ciała.
Do celów obliczeniowych można przyjąć, że masa ciała jest
skoncentrowana w jednym punkcie, zwanym środkiem
ciężkości (grawitacji). Linia przebiegająca przez środek
ciężkości do środka ziemi jest linią ciężkości (grawitacji)
danego ciała.
Wszystkie siły zastosowane względem ciała nadają mu
przyspieszenie nie tylko w kierunku prostolinijnym, tj. w
kierunku przyłożenia siły, lecz też takie, które próbują nim
rotować wokół środka ciężkości. Ruch obrotowy tak
poruszającego się ciała jest proporcjonalny do wielkości
działającej siły i do odległości prostopadłej działania tej siły
od środka ciężkości ciała.
Dlatego jeżeli kierunek działania sił przebiega przez środek
ciężkości ciała, to żaden moment rotacyjny nie zaistnieje,
ponieważ odległość ta będzie zerowa.

PROSTOLINIJNY EFEKT SIŁ
GRAWITACJI
Grawitacja, nazywana czasami ciążeniem
powszechnym, to jedno z czterech
oddziaływań podstawowych wyróżnianych
przez fizykę. Oddziaływanie grawitacyjne jest
zależne od masy posiadanej przez
poszczególne ciała i od odległości między nimi.
W codziennym życiu ciążenie objawia się nam w
postaci przyspieszenia ziemskiego. Jabłka
oraz inne przedmioty spadają, bo działa na nie
siła grawitacji. W skali astronomicznej
ciążenie wyjaśnia, dlaczego planety krążą
wokół Słońca, a Księżyc dookoła Ziemi.

Ruchem prostoliniowym jednostajnym
nazywamy taki
ruch, którego torem jest linia prosta i w czasie
którego ciało,
w dowolnych, ale jednakowych odstępach czasu,
przebywa
jednakowe drogi.
Prędkością ciała w ruchu jednostajnym
prostoliniowym
nazywamy stosunek jego przemieszczenia do czasu,
w
którym to przemieszczenie nastąpiło.
Prędkość jest wielkością wektorową i aby ją określić,
należy
podać jej:
• kierunek (linia na której leży)
• zwrot (grot strzały)
• wartość (długość) - w fizyce określana mianem
szybkości.
Jednostką szybkości jest 1m
s . Wartość prędkości (szybkość) w ruchu
jednostajnym
prostoliniowym informuje nas o tym, jaką drogę
przebywa
ciało w jednostce czasu v =st

OBROTOWY EFEKT SIŁ GRAWITACJI
• Jeżeli działająca na ciało siła nie działa w linii
grawitacji, to ujawnia efekt rotacyjny na punkty
masy ciała, które próbuje obrócić wokół środka
ciężkości.
Popychanie stołu za jedną z jego krawędzi
powoduje nie tylko ruch stołu do przodu, ale także
jego obrót wokół jego środka ciężkości.
• W ciałach stałych (sztywnych) ten ruch rotacyjny
napotyka na opór bezwładności (inercji) ( I ) masy,
która równa się masie (m) pomnożonej przez
kwadrat przeciętnej odległości (p) wszystkich
punktów masy od środka ciężkości ( I = mp”)

Środek ciała ludzkiego jako
całość
Ciało człowieka jest spójnym biomechanizmem,
którego elementy tworzą nierozłączną całość. Nie
jest możliwe stosowanie tradycyjnych metod, które
pozwalają wyznaczyć masę lub ciężary
poszczególnych części tego układu. Istotnym
zagadnieniem, ważnym z punktu widzenia
zachowania równowagi
ciała, jest określenie położenia środka ciężkości
poszczególnych części ciała
i ogólnego środka ciężkości ciała.

W związku z tym, na potrzeby analiz
biomechanicznych ciało człowieka dzielone jest
często na 14 części, które są traktowane jako bryły
sztywne. Są to:
• głowa wraz z odcinkiem szyjnym kręgosłupa (G),
• tułów (T),
• ramię prawe (RAP) i ramię lewe (RAL),
• przedramię prawe (PRP) i przedramię lewe (PRL),
• ręka prawa (REP) i ręka lewa (REL),
• udo prawe (UDP) i udo lewe (UDL),
• podudzie prawe (PUP) i podudzie lewe (PUL),
• stopa prawa (STP) i stopa lewa (STL).
Zaletą traktowania części ciała człowieka jako bryły
sztywnej jest to, że ich środki masy mają stałe
położenie i można je stosunkowo łatwo wyznaczyć
(wykorzystując zasadę, że w przypadku człowieka
pokrywają się one ze środkami ciężkości).

Lokalizacja środków ciężkości
Zrównoważenie ludzkiego ciała wymaga
całkowitej neutralizacji sił grawitacji
działających na ciało przez siły przeciwne. Te
siły przeciwne (reakcje) wytwarzane są przez
opór powierzchni podparcia ciała. Dopóki siły
grawitacji będą działały w obrębie powierzchni
podparcia, będą tam zatrzymywane lub
neutralizowane.
Dopóki powierzchnia podparcia jest dostatecznie
duża aby przyjąć linię grawitacji ciała, ciało to
może być pochylone i nadal zostawać w
grawitacyjnej równowadze.
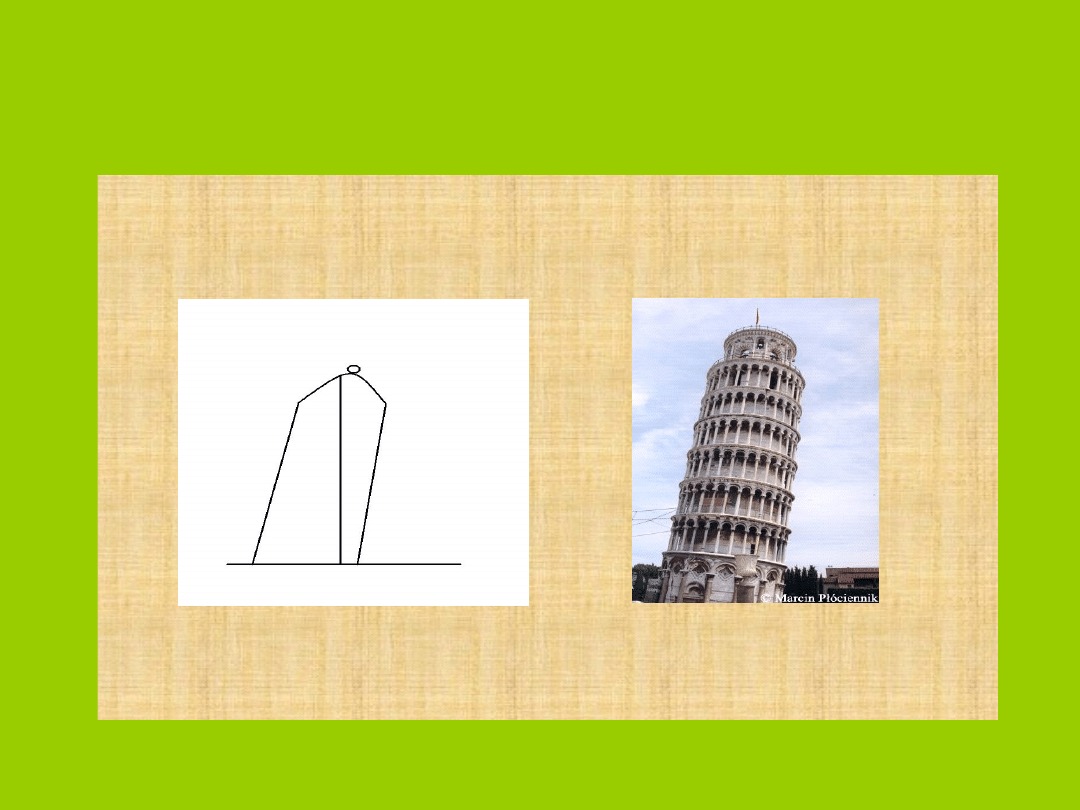
Dobrym tego przykładem jest
krzywa wieża w Pizie.
Krzywa wieża w Pizie
Pochylone ciało w grawitacyjnej równowadze
(powierzchnia podparcia jest dostatecznie duża,
aby przyjąć linię ciężkości tego ciała)

Środek ciężkości – punkt do którego jest
przyłożona wypadkowa wszystkich sił ciężkości
ciała. We wszystkie strony od tego punktu, w
dowolnym do niego kierunku siły wzajemnie się
równoważą i sumy momentów sił ciężkości są
sobie równe.
Istnieje możliwość doświadczalnego określenia
środka ciężkości, linii ciężkości ciała ludzkiego i
wszystkich jego części.
Środek ciężkości znajduje się w pobliżu 3-4 kręgu
krzyżowego ( różnica do 5cm zależy od płci,
wieku, budowy ciała, środek ciężkości w
przypadku dzieci i kobiet podnosi się do góry )
Trudności w określeniu środka ciężkości może
sprawiać nieregularna budowa, zmienny rozkład
masy.

Istotnym zagadnieniem, ważnym z punktu
widzenia zachowania równowagi ciała, jest
określenie położenia środka ciężkości
poszczególnych części ciała
i ogólnego środka ciężkości ciała (OSC).
Położenie OSC w ciele człowieka zależy
od :
• indywidualnej budowy anatomicznej
• nabytej postawy
• aktualnej pozycji
• istnienia zewnętrznych podpór
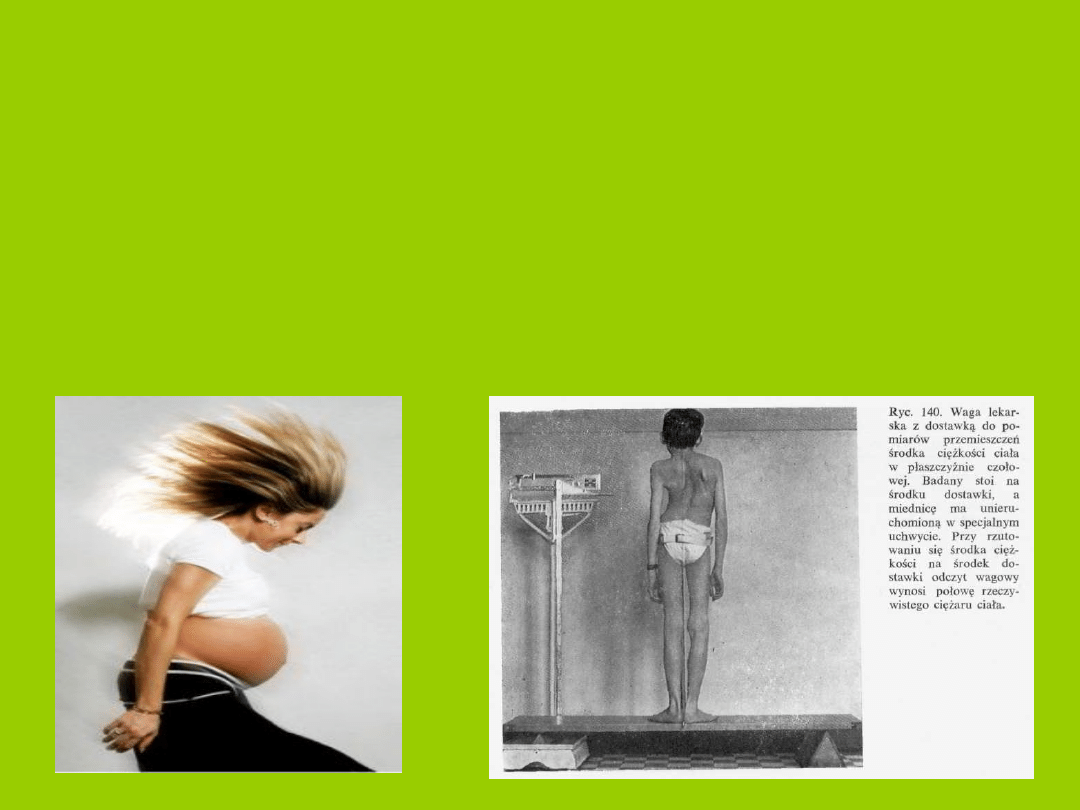
Położenie ogólnego środka ciężkości pozostaje
bez zmiany tak długo, dopóki ciało nie zmieni
dotychczasowego kształtu (np. ciąża, skolioza)
Po przeprowadzeniu szeregu pomiarów
populacji, przyjęto, że OSC znajduje się na
wysokości
< ~ 57% wzrostu mężczyzny
< ~ 55% wzrostu kobiety
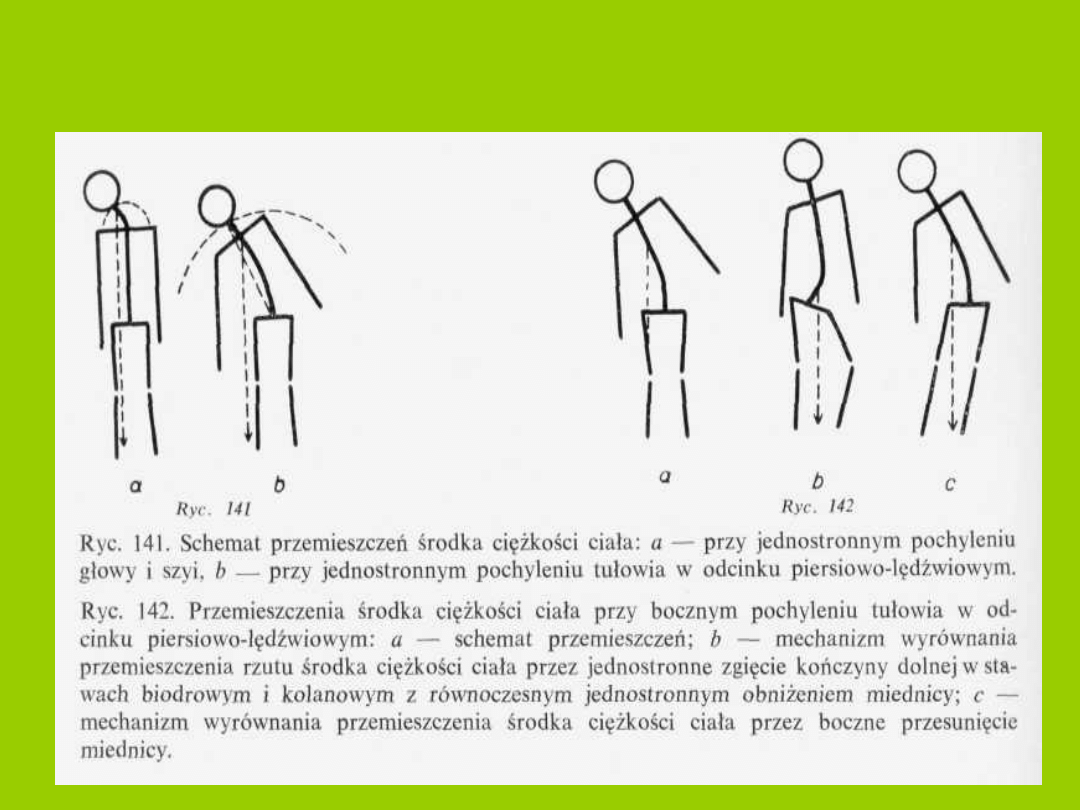
Schemat przemieszczeń środka ciężkości

Własności środka
ciężkości.
•
Środek ciężkości figur płaskich i o regularnych
kształtach leży w ich środku symetrii.
•
Środek ciężkości foremnych i jednorodnych brył
takich jak np. kula, sześcian, znajduje się w ich
środku symetrii.
•
Środek ciężkości mających oś symetrii znajduje
się na osi symetrii.
•
Ciało zawieszone w punkcie będącym jego
środkiem ciężkości znajduje się w stanie
równowagi obojętnej.
•
Środek ciężkości i środek masy nie są pojęciami
równoznacznymi i mogą znajdować się w
różnych punktach. W jednorodnym polu
grawitacyjnym środek ciężkości ciała pokrywa
się ze środkiem masy tego ciała.
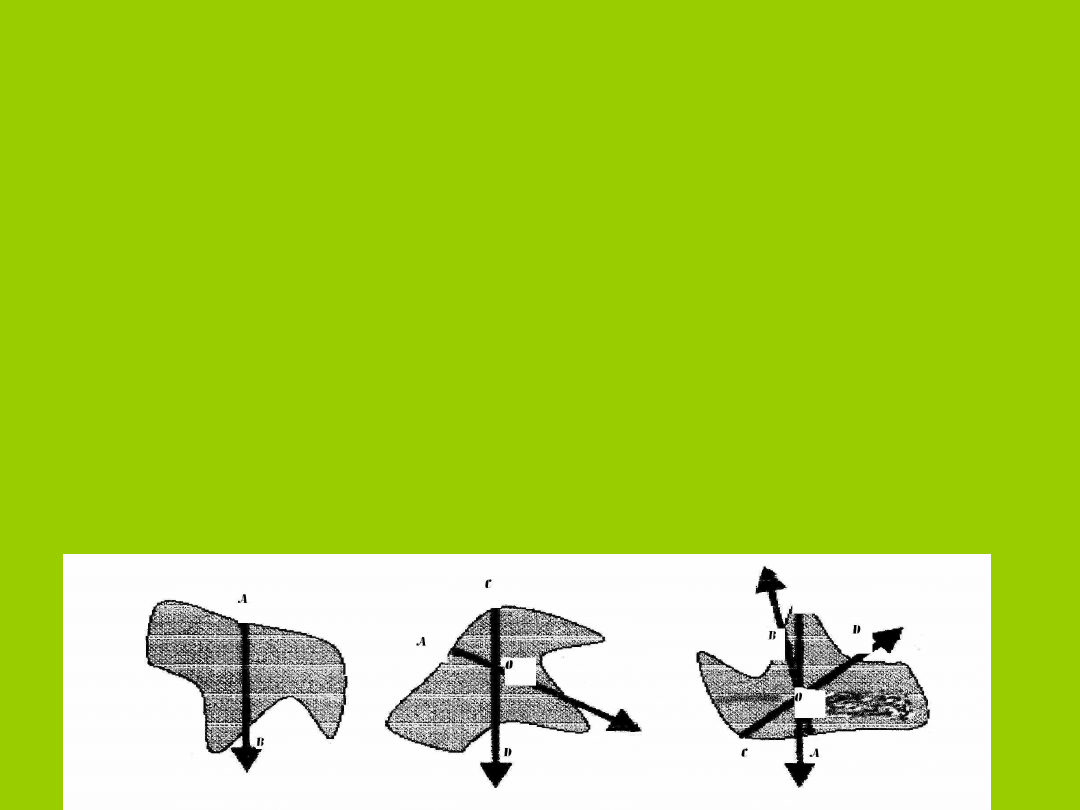
Metoda wyznaczania środka
ciężkości figur płaskich
Przez dowolny punkt figury np.A przeprowadzamy oś
obrotu i w punkcie tym zawieszamy ciało (rys.
1).Ciało przyjmuje takie położenie, że środek
ciężkości O znajdzie się na prostej pionowej, łączącej
punkt A i B. Następnie zawieszamy ciało w innym
punkcie , np. C. Liną pionu będzie linia CD. Środek
ciężkości ciała znajduje się w punkcie przecięcia obu
linii.
Rys.1. Wyznaczanie środka ciężkości figury płaskiej.
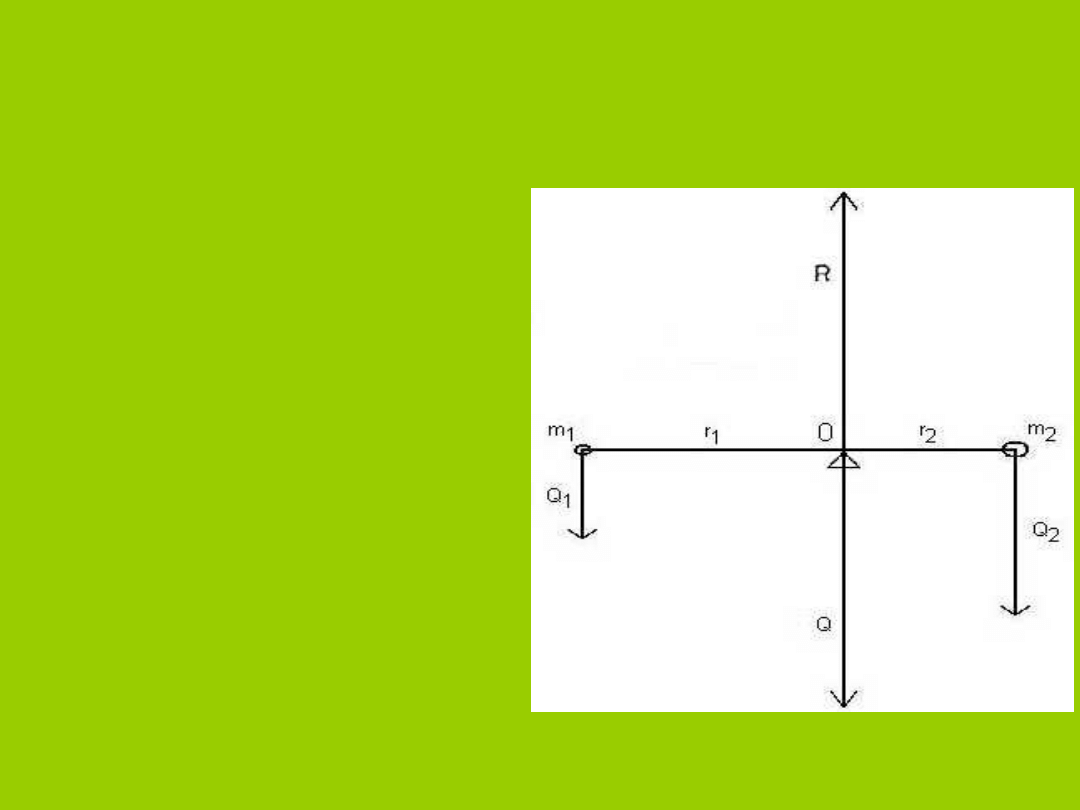
. Metoda wyznaczania środka ciężkości ciała
składającego się
z elementów i więcej elementów.
• Rozważmy układ
składający się z dwóch
mas m1 i m2 połączonych
nieważkim prętem i
znajdujący się w odległości
l = r1 + r2 od siebie.
Q1 + Q2 = Q i
Q1 r1 =
Q2 r2
zatem r1/r2 = Q2/Q1
Rys.2. Położenie środka ciężkości dwóch
ciał.

Punkt przyłożenia wypadkowej siły ciężkości Q
ciężarów obu ciał jest umiejscowiony na
prostej łączącej punkty przyłożenia sił
składowych i dzieli odległości między ciałami
w stosunku odwrotnym do ich ciężarów.
Zgodnie z definicją środka ciężkości ciała, aby
wyznaczyć położenie środka ciężkości, należy
podzielić ciało na elementy o niewielkich
rozmiarach, wyznaczyć ich ciężary i dodać je
zgodnie z zasadą sumowania wektorów
równoległych. Wyznaczony punkt przyłożenia
wektora wypadkowego jest środkiem
ciężkości.
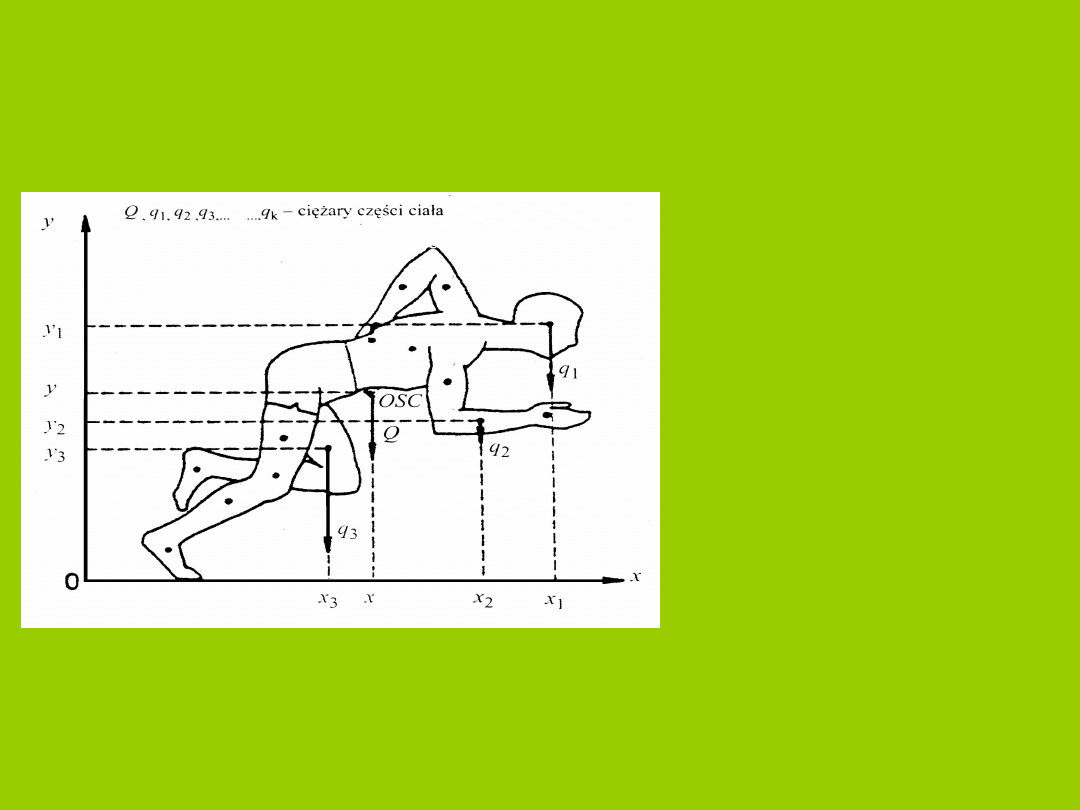
Na poniższym rysunku przedstawiona jest metoda
wyznaczania ogólnego środka ciężkości ciała człowieka jako
układu np. czternastoelementowego i podane są wzory, z
których można obliczyć współrzędne OSC.
q1 x1 + q2x2 +……..+qkxk
Q
Rys. 3. Wyznaczanie ogólnego środka
ciężkości ciała człowieka jako
czternastoelementowego układu
q1y1 +q2y2 +………+qkyk
Q
x =
-------------------------------------------------
y =
------------------------------------------------

Położenie OSC a stan równowagi.
Położenie OSC odgrywa istotną rolę w zachowaniu równowagi
człowieka w różnych pozycjach. Stan równowagi charakteryzuje
się brakiem ruchu. Jeśli przed zadziałaniem sił ciało znajdowało
się w spoczynku, to po ich zadziałaniu będzie w równowadze
nadal, jeżeli zrównoważą się siły oraz momenty działających sił.
Wyróżniamy trzy rodzaje równowagi:
• < stała – po wytrąceniu ciało wróci do położenia
wyjściowego, po to aby osiągnąć minimum energii potencjalnej,
a środek ciężkości ciała powraca do położenia w stanie
równowagi
• < obojętna - po wytrąceniu ciało znajdzie się w stanie
równowagi w innym położeniu, a położenie środka ciężkości nie
zmienia się w trakcie wytrącenia
• < chwiejna – wytrącenie ciała oddala je od wyjściowego
stanu równowagi, a środek ciężkości znajdzie się w położeniu
niższym od poprzedniego.
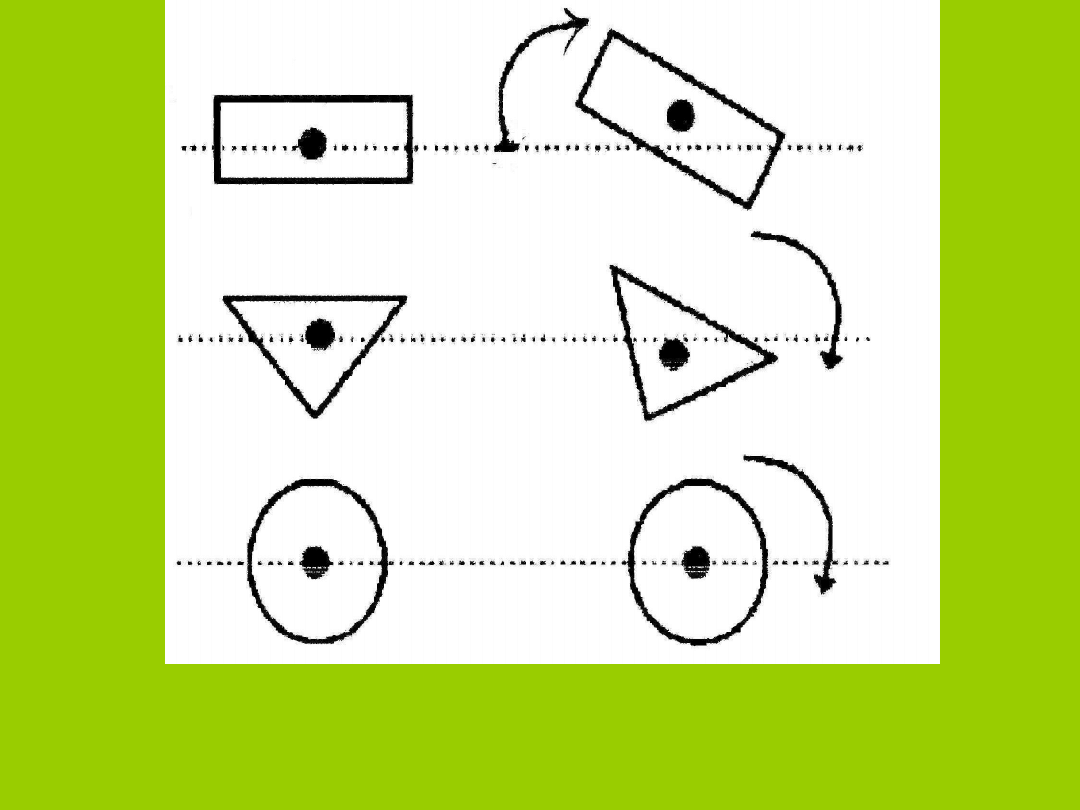
Rys.4 Rodzaje równowagi : stała, chwiejna obojętna.
Człowiek nie bywa w stanie równowagi obojętnej , jego stanem naturalnym
jest stan równowagi chwiejnej, z którego wytrącony powraca po chwili do
stanu równowagi dzięki działaniu odpowiednich mięśni.
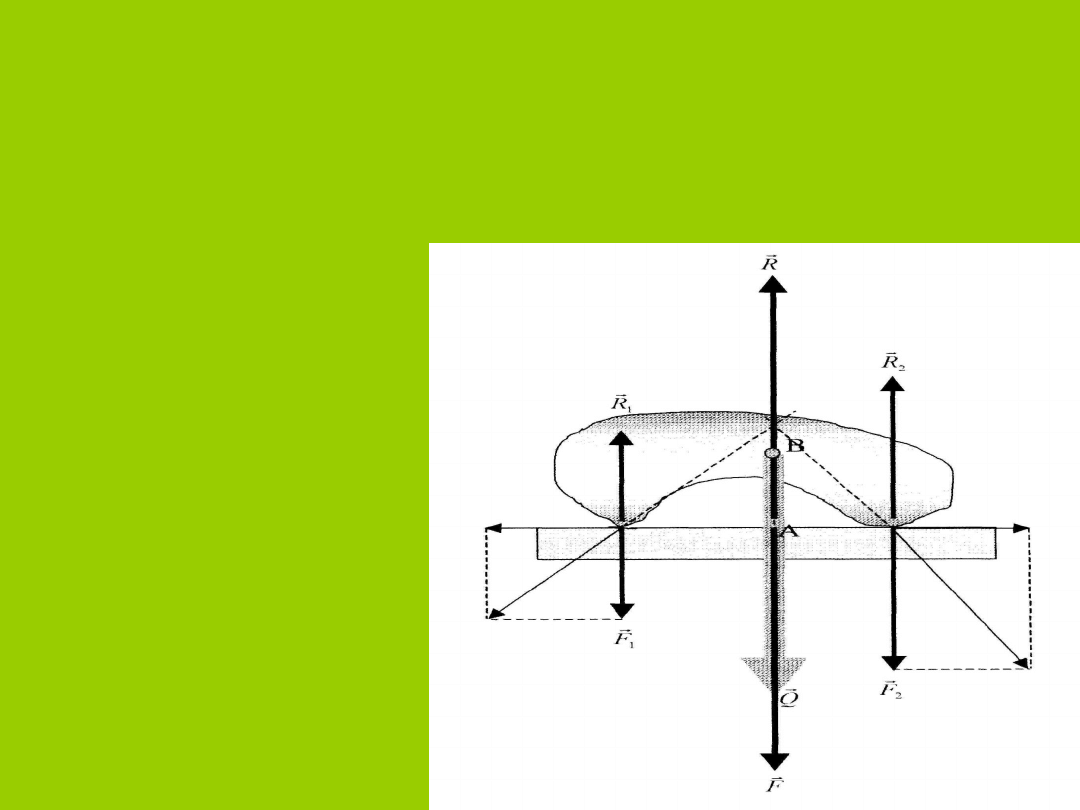
Z warunku równoważenia się momentów sił, można wywnioskować, że ciało
człowieka jest w równowadze, kiedy środek ciężkości ciała znajduje się
powyżej punktu podparcia. Przez punkt podparcia rozumie się punkt
przyłożenia wypadkowej siły nacisku na podłoże.
Rys.5. Przykład ciała
znajdującego się w podporze.
F1 i F2 są siłami nacisku na
podłoże, F jest siła
wypadkową,
R1 i R2 są siłami reakcji
podłoża, R jest wypadkową sił
reakcji.
A – punkt podparcia, B –
środek ciężkości
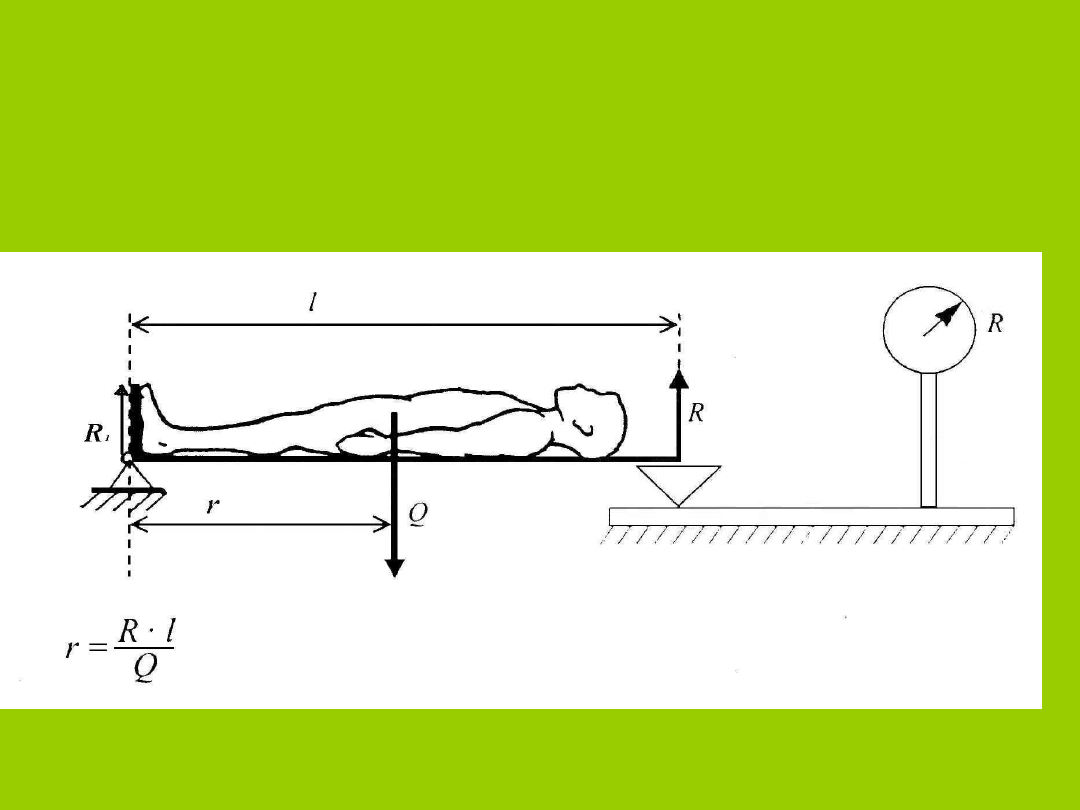
Wyznaczanie położenia ogólnego środka ciężkości ciała
człowieka (OSC) metodą dźwigni jednostronnej.
Dźwignia jednostronna jest sztywną belką podparta w jednym
punkcie, względem którego może ona wykonywać ruch obrotowy.
Jeżeli momenty sił i siły działające równoważą się, to dźwignia jest w
równowadze.
Ta własność dźwigni jest wykorzystana do wyznaczenia położenia
środków ciężkości ciał na niej położonych.
Rys. 6. Wyznaczanie położenia ogólnego środka ciężkości (OSC) za pomocą
dźwigni jednostronnej

gdzie:
r – ramię siły Q
l – długość dźwigni
Q – ciężar ułożonego ciała
R – siła reakcji
Ponieważ momenty sił ciężkości Q i reakcji R równoważą
się, a moment siły R1 jest równy 0 ( ramię działania siły
jest równe 0), wobec tego:
MQ – MR = 0
MQ = MR
Q . r = R . l
i stąd otrzymujemy podaną wcześniejszym wzorem
zależność.
Wyznaczona w ten sposób współrzędna r, która jest
mierzona od osi obrotu dźwigni, jest jednocześnie
odległością środka ciężkości ciała, mierzoną wzdłuż
długiej osi ciała od powierzchni stóp. Ważnym jest, aby
cały czas podczas pomiaru osoba badana znajdowała
się w pozycji nieruchomej.

Wyznaczanie środków ciężkości
poszczególnych segmentów ciała.
Lp
Segment
ciała
Długość
segmentu
ciała l[cm]
Promień wodzący środków
ciężkości wg metody
procentowej
Zatziorsk`ego
Promień wodzący
środków ciężkości wg
równań regresji
Zatziorsk`ego
Nazwa punktu
początkowego
r [cm]
Nazwa
punktu
początkoweg
o
r [cm]
1
Ramię
40
Oś stawu
barkowego leży 2,5
cm poniżej
wyrostka
barkowego
18
Acromion
13,79
2
Przedramię
27
Oś stawu
łokciowego
11,52
Radiale
14,69
3
Ręka
22
Oś stawu
promieniowo
nadgarstkowego
8,14
Stylion
12,13
4
Udo
49
Oś stawu
biodrowego
22,29
Iliocristale
24,92
5
Podudzie
46
Oś stawu
kolanowego
18,63
Tibiale
16,39
6
Stopa
30
Guz piętowy
13,23
Pternion
14,9

Równowaga i stabilność
ciała ludzkiego jako systemu
stawowego

Równowaga i stabilność jest warunkowana przez
następujące czynniki
:
1). Siła m.m. prostowników jest znacznie większa
niż zginaczy. Siła grawitacji zawsze próbuje zinać
ciało ludzkie ku przodowi, ale zapobiega temu m.
krzyżowo-grzbietowy (działa jak szyna), pośladkowy
większy (dla stawu biodrowego) i czworogłowy uda
(dla stawu kolanowego).
Ponadto m.m te są wzmocnione i otoczone
masywnymi powięziami (uda maja własne m.m.
napinające np. naprężacz powięzi szerokiej).
Efektem tego jest tak skuteczne zabezpieczenie
przed zgięciem się ciała, że człowiek może się
dodatkowo obciążać ( nawet przekraczając ciężar
własny). Im bardziej z tyłu umieszczony ciężar, tym
większa wytrzymałość na obciążenie.

2). Napięcie m.m. postawy i antygrawitacyjnych jest
większe niż m.m. kinetycznych. Mięśnie
utrzymujące kolumnę kostnych segmentów jeden
nad drugim są w ciągłym tonicznym skurczu.
Pozycja stojąca zawsze wymaga skurczu i
zwiotczenie nigdy nie jest całkowite.
Miednica kołysząc się ku tyłowi, musi być
zrównoważona nad szczytami obu głów k.k.
udowych, czyli wokół wspólnej osi stawów
biodrowych. Pociągnie to za sobą skurcz m.m. przed
stawami biodrowymi (biodrowo-lędźwiowego,
grzebieniowego) i za stawami (pośladkowego wlk.,
dwugłowego uda, półbłoniastego, półścięgnistego)
oraz dla bocznej równowagi w ruchu –
pośladkowego średniego i małego.

Jednak przy pełnym wyproście stawu kolanowego (gdy
zadziała mechanizm blokady), prostowniki tego stawu
(czworogłowy uda) mogą się chwilowo rozluźnić. Dzieje się
tak, ponieważ linia grawitacji przebiega przez przednią część
stawu lub przed nim, co powoduje pewien jego przeprost , aż
zapobiegną temu więzadła boczne stawu kolanowego (obcasy
wykluczają przeprost).
Poruszanie się w biegu i noszenie butów na wysokich
obcasach powoduje pociąganie ciała ku przodowi. Zapobiega
temu zgięcie podeszwowe stopy, a linię ciężkości utrzymują
długo napięte prostowniki.
Stawy skokowe są stabilizowane przez napięcie m.m.:
piszczelowego przedniego, prostowników palców stóp,
brzuchatego łydki i szczególnie płaszczkowatego.
Stabilne połączenie piszczelowo-strzałkowe z k. skokową
(połączenie na „czop i wpust”) zapobiega jakimkolwiek
przyśrodkowym czy bocznym kołysaniom
(równoważone jest
to już w stawie biodrowym).

3).Fundamentalnym czynnikiem w zachowaniu
równowagi jest elastyczność kręgosłupa i jego
krzywizny fizjologiczne, które się tak dostosowują,
że linia grawitacji zwykle pada na powierzchnię
podparcia całej struktury. Gdy pada poza nią to
równowaga nie może być zachowana.
4). Podstawa podparcia może być rozszerzona w
każdym kierunku przez odwiedzenie, zgięcie lub
wyprost w stawie biodrowym. Gdy stoimy ze
złączonymi stopami, podstawą podparcia ciała jest
powierzchnia podeszw, lecz przy rozstawieniu stóp,
jej powierzchnia na tyle wzrasta, że trafia na nią
linia ciężkości. Jest to sposób na dostosowanie
naszej niestabilnej struktury do utrzymania
wyprostowanej postawy.

Bibliografia:
•
T. Bober, J. Zawadzki: Biomechanika układu ruchu
człowieka.
•
J. w. Błaszczyk : Biomechanika kliniczna
•
T. Bober i inni: Biomechanika – wybrane zagadnienia
•
Z.Zagrobelny, M.Woźniewski „Biomechanika kliniczna”
•
T. Kasperczyk „Wady postawy ciała, diagnostyka i
leczenie”
•
A. Błońska ; „Czemu kobiety w ciąży się nie
przewracają” [online]. [dostęp: 3 maja 2009].
•
. Mirosłwa łukaszewski, "Podstawy Fizyki", W-wa 2006
tom 1
•
2. Zbigniew w. Jóżwiak, "Obciązenie układu ruchu w
praktyce pielęgniarskiej" Łódź 2000
•

Referat
przygotowali:
• Renata Szpiech
• Monika Zbroja
• Joanna Piecyk
• Monika Mieczko
• Kazimierz Pączko
• Małgorzata Kowalska
• Arkadiusz Partyka
• Anna Chuda
• Jolanta Job
• Katarzyna Sałacka
• Anna Żywina
• Katarzyna Mania
• Iwona Psykała
• Beata Pietrzak
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
Wyszukiwarka
Podobne podstrony:
Prezentacja na seminarium
internetoholizm prezentacja na slajdach
Bezrobocie prezentacja na WOS
Prezentacja na muzyke
Pozagałkowe zapalenie nerwu wzrokowego prezentacja na zajęcia
prezentacja na zajecia z etyki
wstepna prezentacja na zywienie
B Prezentacja na obrone mgr
Traktat św. Grzegorza z Nyssy, prezentacje, WSZYSTKIE PREZENTACJE, OAZA, Prezentacje cd, Prezentacje
Prezentacja na systemy polityczne zaj 1
credo, prezentacje, WSZYSTKIE PREZENTACJE, OAZA, Prezentacje cd, Prezentacje, Prezentacje na OND III
Zagrozenia czasu pokoju, 3 # SZKOŁA - prezentacje na lekcje, EDUKACJA DLA BEZPIECZEŃSTWA, zagrożenia
zabawy integtracyjne, 3 # SZKOŁA - prezentacje na lekcje, wdżwr
ROMANTYZM prezentacja na maturę ustną - język polski, MATURA USTNA JEZYK POLSKI
Na grzybicę pochwy można stosować citrosept w płynie, 3 # SZKOŁA - prezentacje na lekcje, wdżwr
Prezentacja na mature
Prezentacja na systemy polityczne zaj 2
Jaki prezent na Dzień Matki
prezentacja na public, PRACE
więcej podobnych podstron