
1
Rozpoznawanie
obrazów

2
Proces przetwarzania w systemie
wizyjnym może być podzielony na trzy
części:
•Uzyskanie cyfrowej reprezentacji obrazu
(recepcja, akwizycja);
•Przetworzenie obrazu cyfrowego z
wykorzystaniem technik komputerowych;
•Analiza i przetworzenie rezultatów w celu
sterowania robotami, kontroli automatycznych
procesów, kontroli jakości, itp.

3
Główne funkcje systemu wizyjnego to:
•Kontrola (określenie pozycji i ewentualne
wygenerowanie komend do robota w celu
wykonania pewnych czynności. Np. wybranie
obszaru do malowania przez robota, kontrola
elementów, itp. );
•Badanie (określenie parametrów elementów, np.
kształtu, jakości powierzchni, ilości otworów );
•Wprowadzanie danych (informacje o jakości
produktów, materiałów mogą być umieszczone w
bazie danych. W tym czasie te dane mogą być
sprawdzone w procesie inspekcji.).
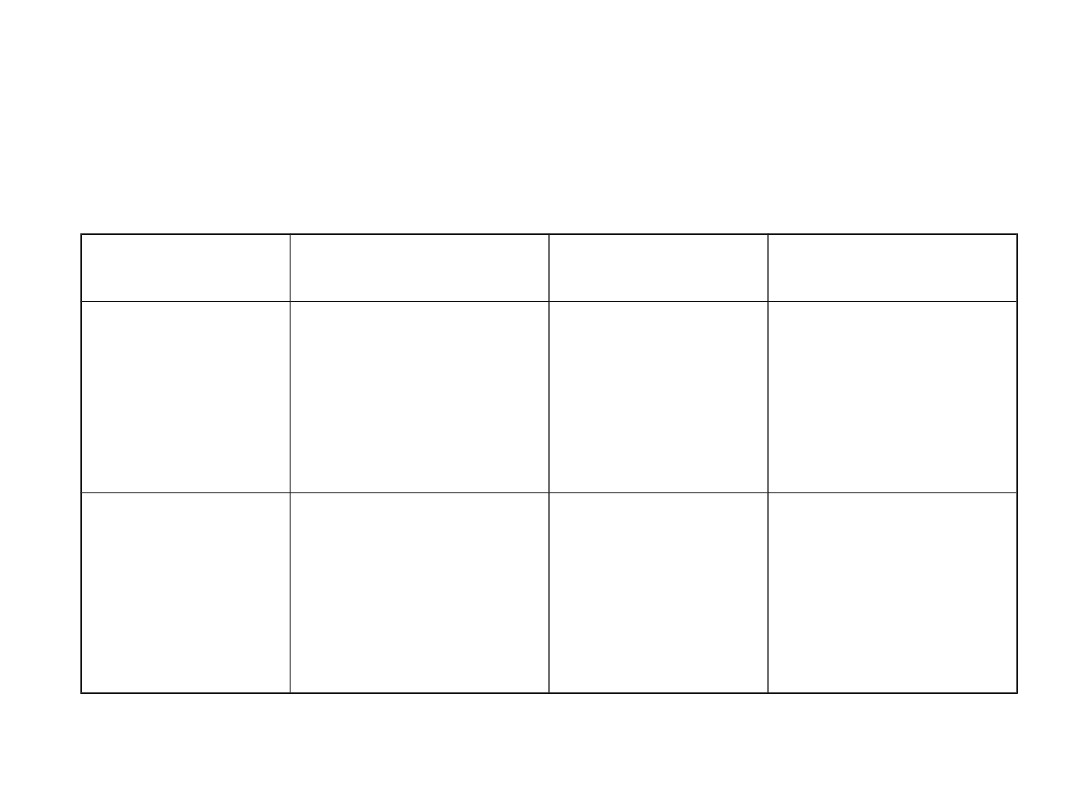
4
Zestawienie obrazujące możliwości
człowieka i cyfrowego systemu
wizyjnego:
Cecha
Człowiek
Komputer
Zdolności
adaptacyjne
Duże zdolności adaptacyjne,
związane zarówno z celem jak
i typem wejścia.
System sztywny w sensie
postawionego celu
rozpoznania oraz w sensie
typu wejścia (wymaga obrazu
dyskretnego - piksele).
Sposób
rozpoznawa
nia
Zdolności dokonywania
względnie dokładnych
oszacowań badanych
obiektów, np. wykrywanie
zepsutych owoców na
podstawie koloru, tekstury
(faktury), kształtu, zapachu.
Zdolność dokonywania
pomiarów przestrzennych na
zdeterminowanym obrazie
wejściowym, np.: długość i
powierzchnia – zliczanie
pikeseli.
Kolor
Subiektywna interpretacja.
Pomiar parametrów R,G, B.
Czułość
Ograniczona zdolność
identyfikacji poziomów
szarości (~7 - 10).
Zależna od rodzaju układu
pozyskiwania obrazu.
5
Cecha
Człowiek
Komputer
Czas reakcji
~0,1 s
Zależnie od realizacji
sprzętowej i oprogramowania
systemu komputerowego
~1/1000s lub mniejszy.
Działanie w
przestrzeni 2D
i 3D
Łatwa lokalizacja i
rozpoznanie obiektów.
Łatwiejsza lokalizacja i
rozpoznanie obiektów w
przestrzeni 2D niże 3D.
Percepcja
Percepcja jasności w
skali logarytmicznej.
Wpływ otaczającego
obszaru (tła) na sposób
percepcji
Możliwość percepcji zarówno
w skali liniowej jak i
logarytmicznej.
Zakres fal
380 - 780 nm
~10nm – promieniowanie X
do ~10
3
m (podczerwień).
6
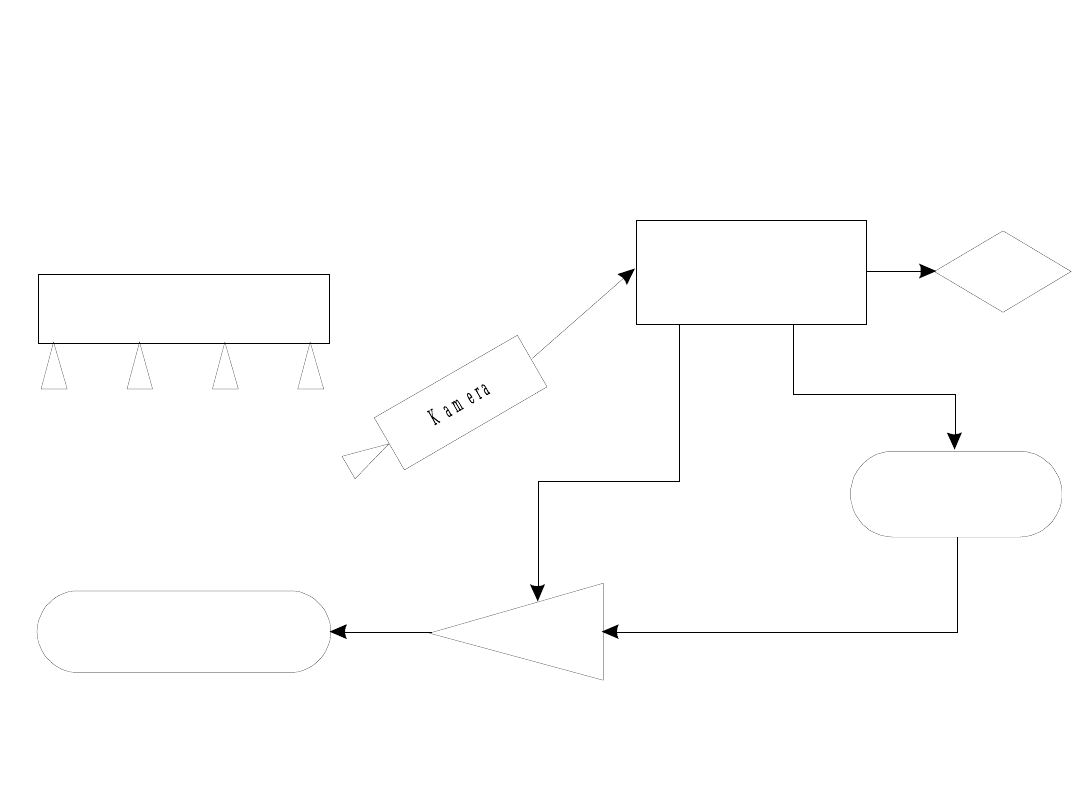
Przykładowy schemat blokowy
cyfrowego systemu wizyjnego:
P r o c e s
p r o d u k c y j n y
O ś w i e tl e n i e
P r o c e s
k o n t r o l n y
C y f ro w y s y s t e m
w i z y j n y
Z a rz ą d z a n i e
A l a r m

7
W literaturze stosunkowo często spotyka się
propozycje różnych parametrów, które mogą być
wykorzystane do opisu kształtu obiektów
widocznych na obrazie.
Wybierając współczynniki decydujemy się albo na
dokładniejsze odwzorowanie kształtu obiektu,
albo na szybsze działanie algorytmu.
Kryteria rozpoznawania i klasyfikacji
obiektów cyfrowych
8
S
2
1
W
L
2
W
Współczynniki kształtu
Współczynniki cyrkularności:
W1 (wyznacza średnicę koła, którego
pole jest równe polu danego obiektu)
W2 (Wyznacza średnicę koła o
obwodzie równym obwodowi
analizowanego obiektu)
gdzie:
L – obwód rzutu obiektu
S – pole rzutu obiektu
Powyższe współczynniki powinny być
normalizowane.
9
współczynnik Malinowskiej
Można go jeszcze bardziej
uprościć otrzymując w
rezultacie współczynnik
nazwany Mz (W9).
1
S
2
L
3
W
Współczynniki W1, W2, W3 mają prostą postać
i są szybkie do obliczenia.
10
współczynnik Blaira-
Blissa (większa
wrażliwość na zmiany
kształtu)
współczynnik
Danielssona
i
2
i
r
2
S
4
W
gdzie:
i – numer piksela obiektu
r
i
– odległość piksela obiektu od środka
ciężkości obiektu
l
i
– minimalna odległość piksela od konturu
obiektu
2
i
i
3
l
S
5
W
11
współczynnik Harlicka
gdzie:
i – numer piksela obiektu
d
i
– odległość pikseli konturu obiektu od jego
środka ciężkości
n – liczba punktów konturu
i
2
i
2
i
i
1
d
n
d
6
W
Współczynniki W4, W5, W6 wolniejsze w
obliczaniu niż W1, W2, W3.
12
Czasami są przydatne cechy pośrednie, które
określają np. współczynniki:
W7 (nazywany Lp1), badający
zmienność minimalnej i
maksymalnej odległości środka
ciężkości od konturu obiektu
W8 (nazywany Lp2) podający
stosunek maksymalnego
gabarytu do obwodu obiektu.
max
min
R
r
7
W
L
L
8
W
max
gdzie:
r
min
– minimalna odległość konturu od środka
ciężkości
R
max
– maksymalna odległość konturu od środka
ciężkości
L
max
– maksymalny gabaryt obiektu
L – obwód rzutu obiektu
13
L
S
2
9
W
W9 nazwany współczynnikiem Mz
(uproszczony współczynnik
Malinowskiej)
gdzie:
L – obwód rzutu obiektu
S – pole rzutu obiektu

14
Podstawowe parametry:
przypadku
pozostalym
w
0
obiekt
gdy
1
j
,
i
p
j
,
i
p
S
n
1
i
m
1
j
przypadku
pozostalym
w
0
kontur
gdy
1
j
,
i
p
j
,
i
p
L
n
1
i
m
1
j
pole
obiektu:
obwód
obiektu:
15
przypadku
pozostalym
w
0
obiekt
gdy
j
k
S
k
y
~
przypadku
pozostalym
w
0
obiekt
gdy
i
k
S
k
x
~
n
1
i
m
1
j
n
1
i
m
1
j
gdzie:
S – pole obiektu
L – obwód obiektu
n x m – rozmiar obiektu
– współrzędna x środka ciężkości
– współrzędna y środka ciężkości
x
~
y
~
środek
ciężkości:
16
Przykładowe figury:
17
Formuła
Crofton’a:
135
45
90
0
N
N
2
a
N
N
a
4
L
gdzie:
N
0
N
90
N
45
N
135
– rzuty figury dla
wybranych
kierunków rzutowania,
a – odległość punktów siatki.
18
Przykładowe elementy strukturalne do wyznaczania
długości rzutów figury:
kąt
otoczenie
kąt
otoczenie
0
o
90
o
45
o
135
o
X
X
X
1
0
X
X
X
X
X
X
X
X
0
X
1
X
X
X
X
X
X
0
X
X
1
X
X
X
X
X
0
X
X
X
1

19
Momenty geometryczne:
dxdy
y
,
x
f
y
x
m
q
p
pq
Dwuwymiarowy moment rzędu (p+q) dla funkcji
f(x,y) :
n
i
m
j
ij
q
p
pq
x
j
i
m
1
1
20
dxdy
y
,
x
f
y
~
y
x
~
x
M
q
p
pq
00
10
m
m
x
~
00
01
m
m
y
~
Moment centralny
f(x,y):
gdzi
e:
n
i
m
j
ij
q
p
pq
x
j
j
i
i
M
1
1
~
~
00
10
m
m
i
~
00
01
m
m
j
~
21
Momenty centralne można przedstawić za
pomocą momentów zwykłych:
00
00
m
M
0
m
m
m
m
M
00
00
01
01
01
0
m
m
m
m
M
00
00
10
10
10
00
01
10
11
11
m
m
m
m
M
00
2
10
20
20
m
m
m
M
00
2
01
02
02
m
m
m
M

22
2
01
20
11
21
21
i
m
2
j
m
i
m
2
m
M
~
~
~
2
10
02
11
12
12
j
m
2
i
m
j
m
2
m
M
~
~
~
2
10
20
30
30
i
m
2
i
m
3
m
M
~
~
2
01
02
03
03
j
m
2
j
m
3
m
M
~
~
23
Z powyższych zależności możemy
wyznaczyć niezmienniki momentowe:
2
oo
02
20
m
M
M
1
M
4
oo
2
11
2
02
20
m
M
4
M
M
2
M
5
oo
2
03
21
2
12
30
m
M
M
3
M
3
M
3
M
5
oo
2
03
21
2
12
30
m
M
M
M
M
4
M
24
7
oo
03
21
12
30
11
2
03
21
2
12
30
02
20
m
M
M
M
M
M
4
M
M
M
M
M
M
6
M
4
oo
2
11
02
20
m
M
M
M
7
M
10
00
2
03
21
2
12
30
03
21
03
21
2
03
21
2
12
30
12
30
12
30
m
M
M
M
M
3
M
M
M
M
3
M
M
3
M
M
M
M
M
3
M
5
M
25
7
oo
12
21
03
30
11
2
21
12
03
02
2
12
03
21
20
m
M
M
M
M
M
M
M
M
M
M
M
M
M
9
M
10
oo
12
21
03
2
21
12
30
2
21
12
03
30
m
M
M
M
M
M
M
4
M
M
M
M
10
M
5
oo
2
21
2
12
03
21
12
30
m
M
M
M
M
M
M
8
M
Wszystkie powyższe momenty teoretycznie powinny
być inwariantne (niezmienne) ze względu na obrót,
translację i zmianę skali obiektu.

26
W celu ujednolicenia obrazów o
różnych rozmiarach wykorzystuje się
znormalizowany moment centralny:
1
2
q
p
00
pq
1
2
q
p
00
pq
pq
m
M
M
M
N
Znormalizowane momenty centralne nie zapewniają
niezmienniczości ze względu na obrót.
Dlatego wprowadzono niezmienniki momentowe,
które maja te własność.

27
02
20
N
N
1
M
2
11
2
02
20
N
4
N
N
2
M
2
03
21
2
12
30
3
3
3
N
N
N
N
M
Z powyższych zależności możemy
wyznaczyć niezmienniki momentowe:
2
03
21
2
12
30
4
N
N
N
N
M

28
2
03
21
2
12
30
03
21
03
21
2
03
21
2
12
30
12
30
12
30
N
N
N
N
3
N
N
N
N
3
N
N
3
N
N
N
N
N
3
N
5
M
03
21
12
30
11
2
03
21
2
12
30
02
20
N
N
N
N
N
4
N
N
N
N
N
N
6
M
2
11
02
20
N
N
N
7
M

29
2
21
2
12
03
21
12
30
N
N
N
N
N
N
8
M
12
21
03
30
11
2
21
12
30
02
2
12
03
21
20
9
N
N
N
N
N
N
N
N
N
N
N
N
N
M
12
21
03
2
21
12
30
2
21
12
03
30
N
N
N
N
N
N
4
N
N
N
N
10
M
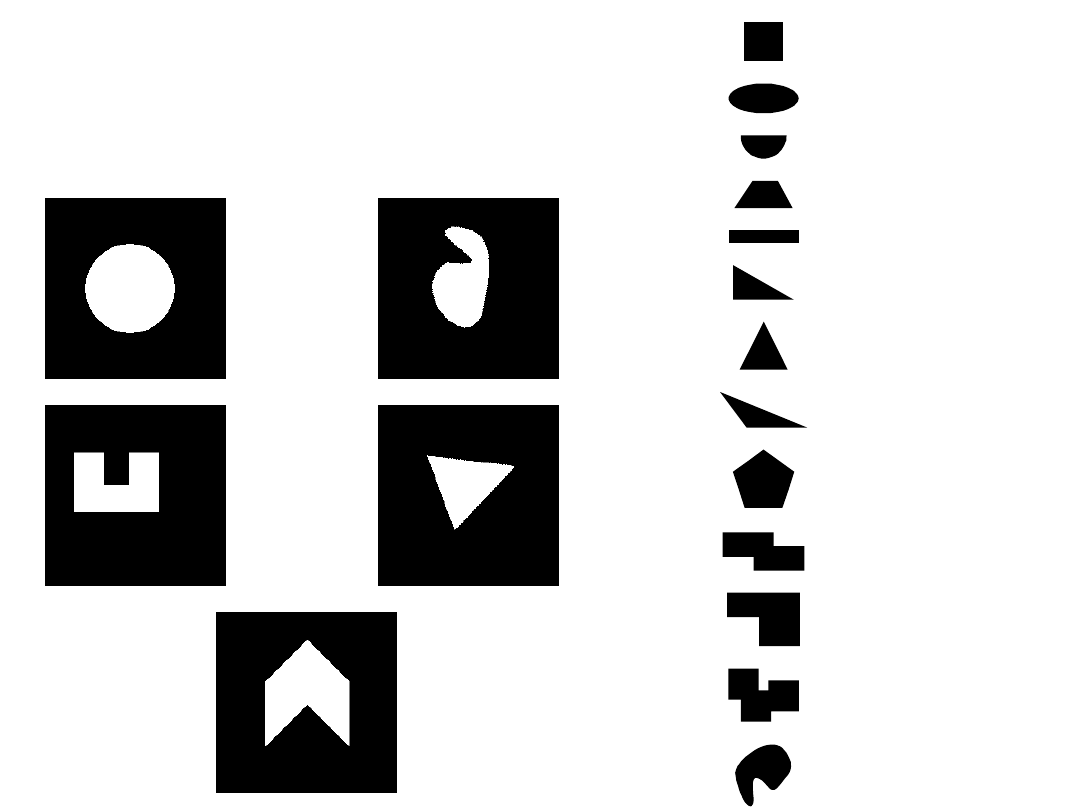
30
Przykłady klas
rozpoznawanych
obiektów:
k w a d r a t
e l i p s a
p ó ł k o l e
tr a p e z
p r o s t o k ą t
tr ó j k ą t p r o s t o k ą t n y
tr ó j k ą t r ó w n o r a m i e n n y
tr ó j k ą t r o z w a r t o k ą tn y
p i ę c i o k ą t
k s z t a ł t 1
k s z t a ł t 2
k s z t a ł 3
k s z t a ł t 4
31
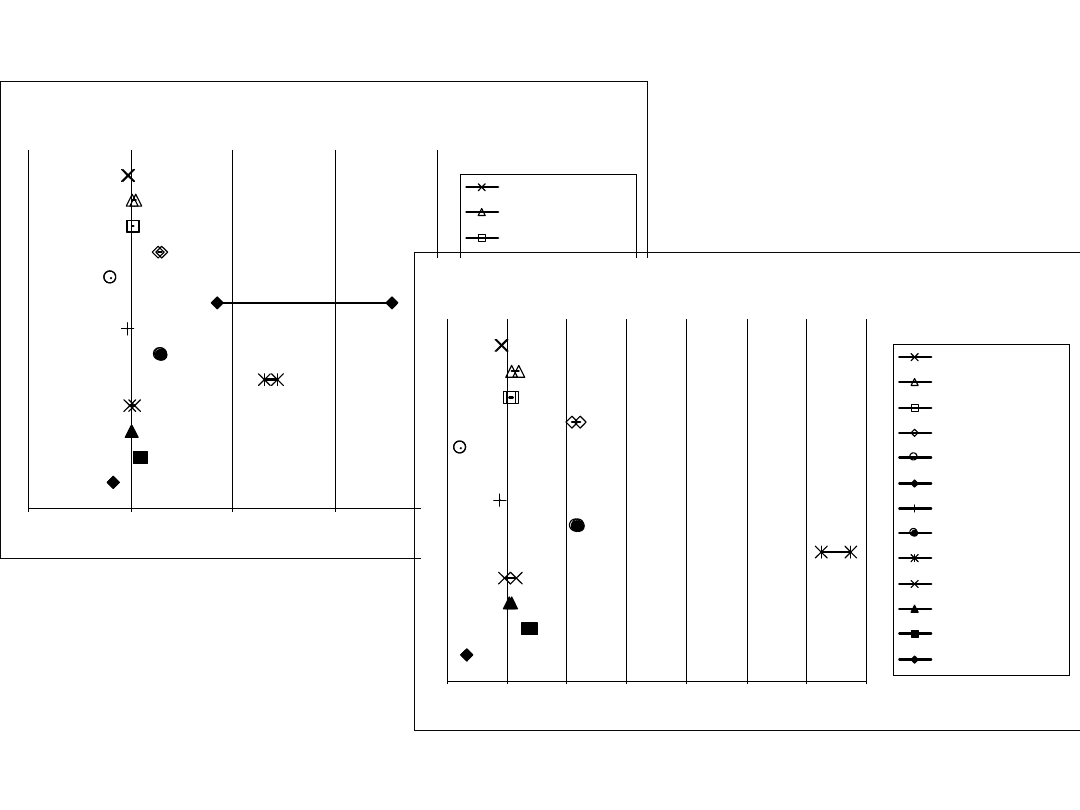
Współczynnik W1
Zakres zmienności współczynnika W1
0
50
100
150
200
Kształt 4
Kształt 3
Kształt 2
Kształt 1
Pięciokąt
Trójkąt rozwartokątny
Trójkąt równoramienny
Trójkąt prostokątny
Prostokąt
Trapez
Półkole
Elipsa
Kwadrat
Zakres zmienności współczynnika W1
0
50
100
150
Kształt 4
Kształt 3
Kształt 2
Kształt 1
Pięciokąt
Trójkąt rozwartokątny
Trójkąt równoramienny
Trójkąt prostokątny
Prostokąt
Trapez
Półkole
Elipsa
Kwadrat
Bez zmiany skali
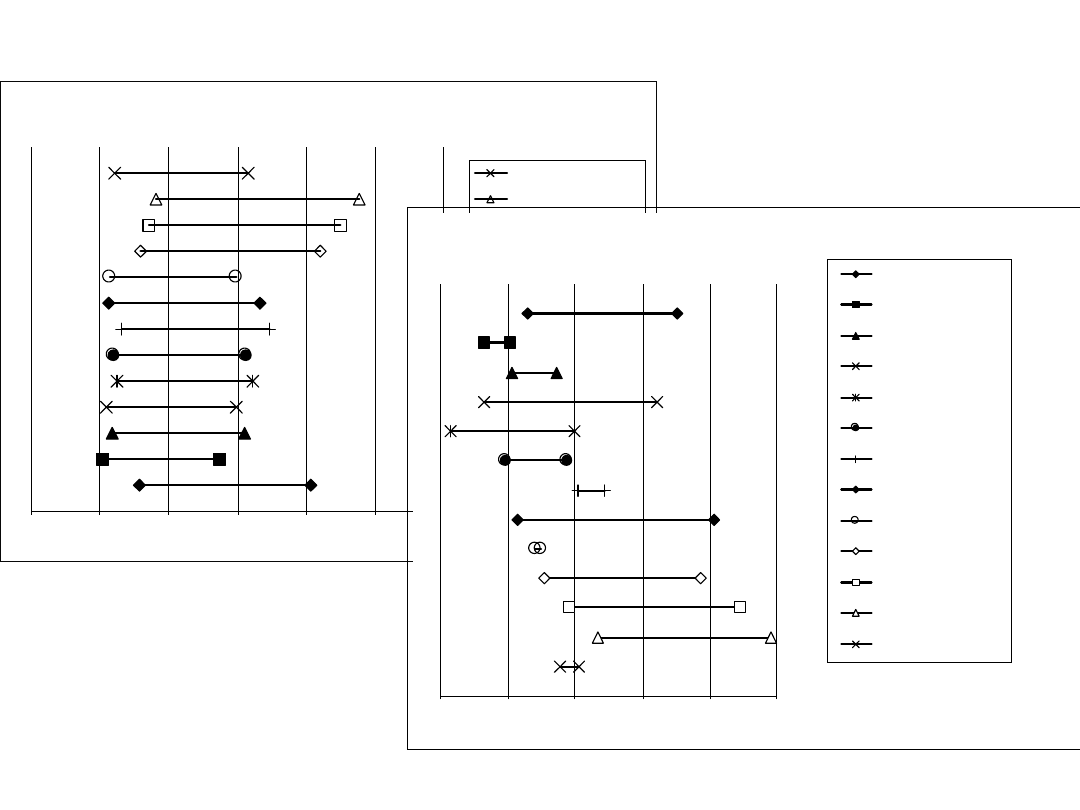
32
Współczynnik W2
Zakres zmienności współczynnika W2
0
50
100
150
200
250
300
Kształt 4
Kształt 3
Kształt 2
Kształt 1
Pięciokąt
Trójkąt rozwartokątny
Trójkąt równoramienny
Trójkąt prostokątny
Prostokąt
Trapez
Półkole
Elipsa
Kwadrat
Zakres zmienności współczynnika W2
85
105
125
145
165
185
Kwadrat
Elipsa
Półkole
Trapez
Prostokąt
Trójkąt prostokątny
Trójkąt równoramienny
Trójkąt rozwartokątny
Pięciokąt
Kształt 1
Kształt 2
Kształt 3
Kształt 4
Bez zmiany skali
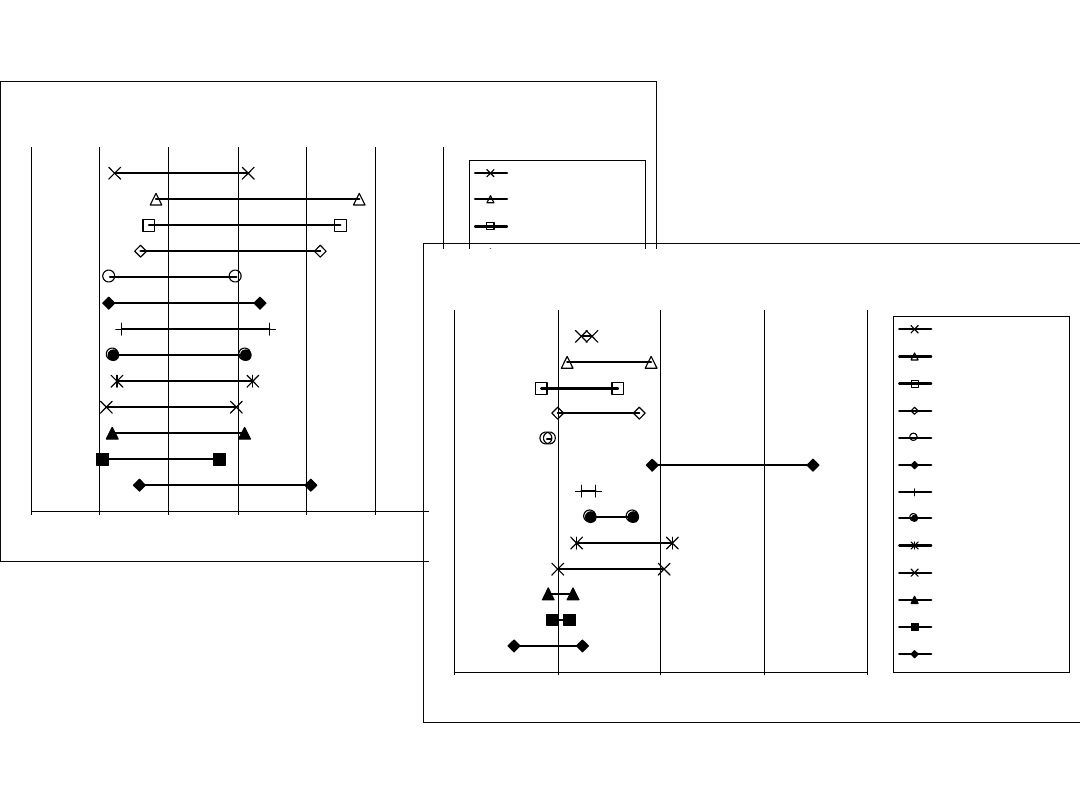
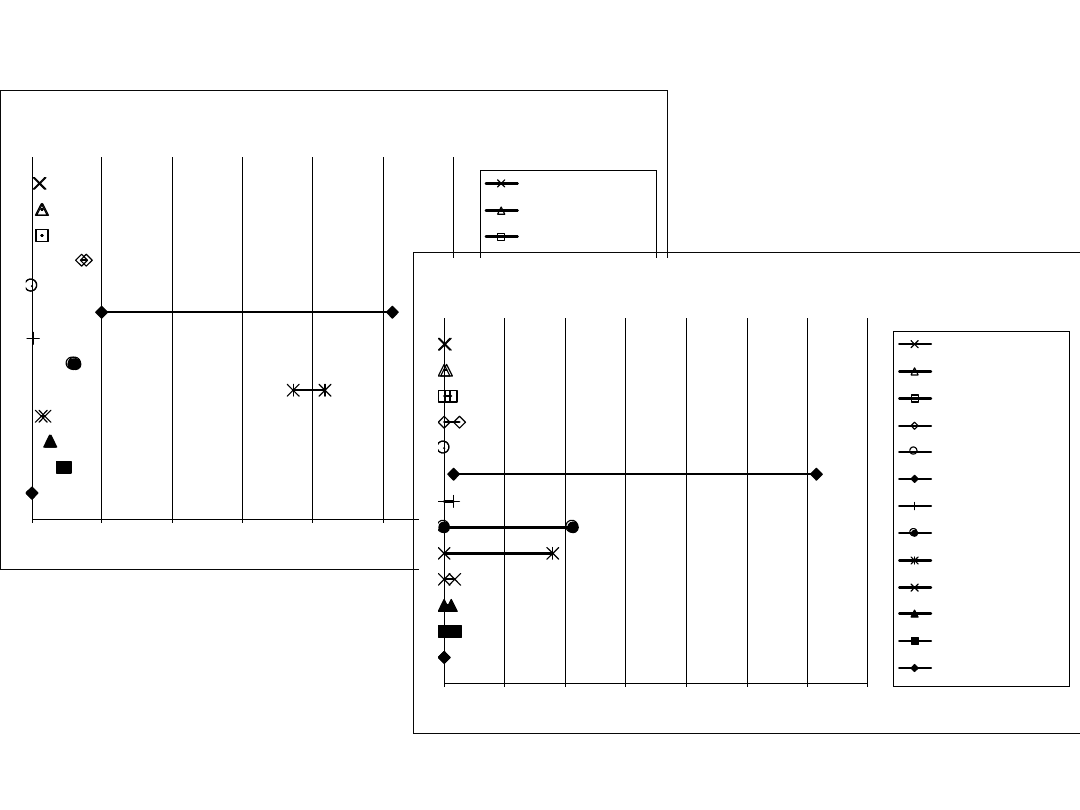
33
Współczynniki W2 i W3
Zakres zmienności współczynnika W2
0
50
100
150
200
250
300
Kształt 4
Kształt 3
Kształt 2
Kształt 1
Pięciokąt
Trójkąt rozwartokątny
Trójkąt równoramienny
Trójkąt prostokątny
Prostokąt
Trapez
Półkole
Elipsa
Kwadrat
Zakres zmienności współczynnika W3
-0,5
0
0,5
1
1,5
Kształt 4
Kształt 3
Kształt 2
Kształt 1
Pięciokąt
Trójkąt rozwartokątny
Trójkąt równoramienny
Trójkąt prostokątny
Prostokąt
Trapez
Półkole
Elipsa
Kwadrat
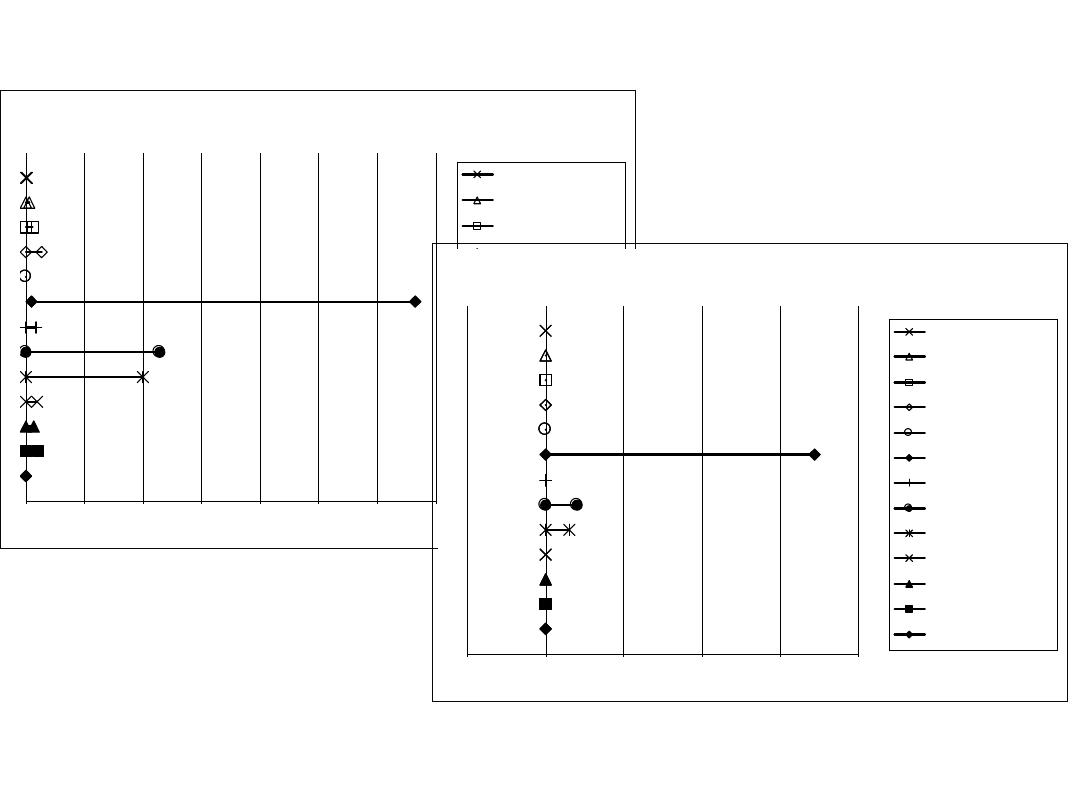
34
Współczynniki W4 i W5
Zakres zmienności współczynnika W4
0
0,2
0,4
0,6
0,8
1
1,2
Kształt 4
Kształt 3
Kształt 2
Kształt 1
Pięciokąt
Trójkąt rozwartokątny
Trójkąt równoramienny
Trójkąt prostokątny
Prostokąt
Trapez
Półkole
Elipsa
Kwadrat
Zakres zmienności współczynnika W5
0
50
100
150
200
250
Kształt 4
Kształt 3
Kształt 2
Kształt 1
Pięciokąt
Trójkąt rozwartokątny
Trójkąt równoramienny
Trójkąt prostokątny
Prostokąt
Trapez
Półkole
Elipsa
Kwadrat

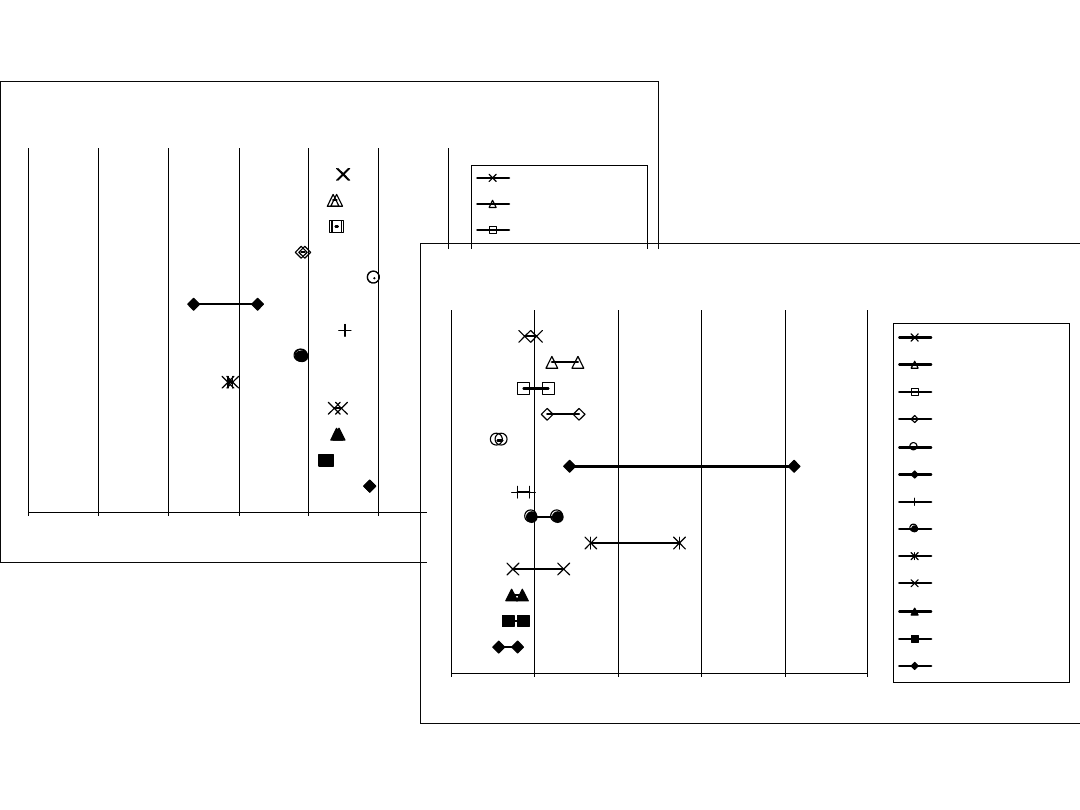
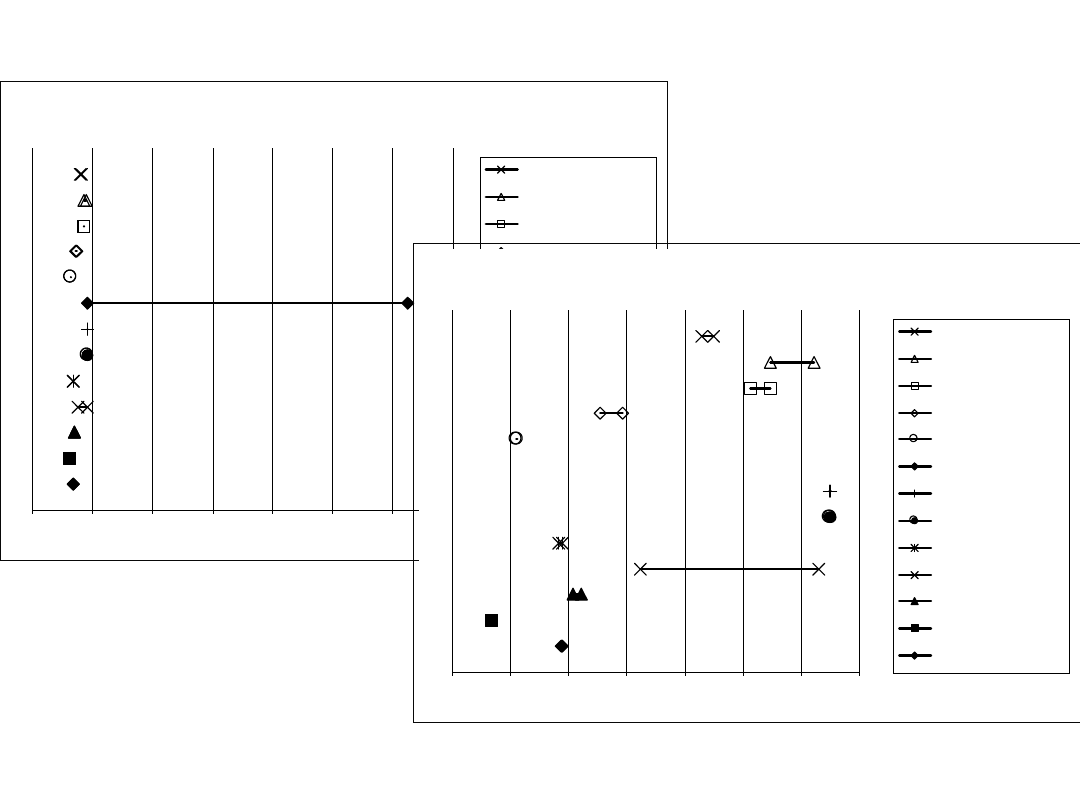
35
Współczynniki W6 i W7
Zakres zmienności współczynnika W6
0,88
0,9
0,92
0,94
0,96
0,98
1
1,02
Kształt 4
Kształt 3
Kształt 2
Kształt 1
Pięciokąt
Trójkąt rozwartokątny
Trójkąt równoramienny
Trójkąt prostokątny
Prostokąt
Trapez
Półkole
Elipsa
Kwadrat
Zakres zmienności współczynnika W7
0
0,2
0,4
0,6
0,8
1
Kształt 4
Kształt 3
Kształt 2
Kształt 1
Pięciokąt
Trójkąt rozwartokątny
Trójkąt równoramienny
Trójkąt prostokątny
Prostokąt
Trapez
Półkole
Elipsa
Kwadrat
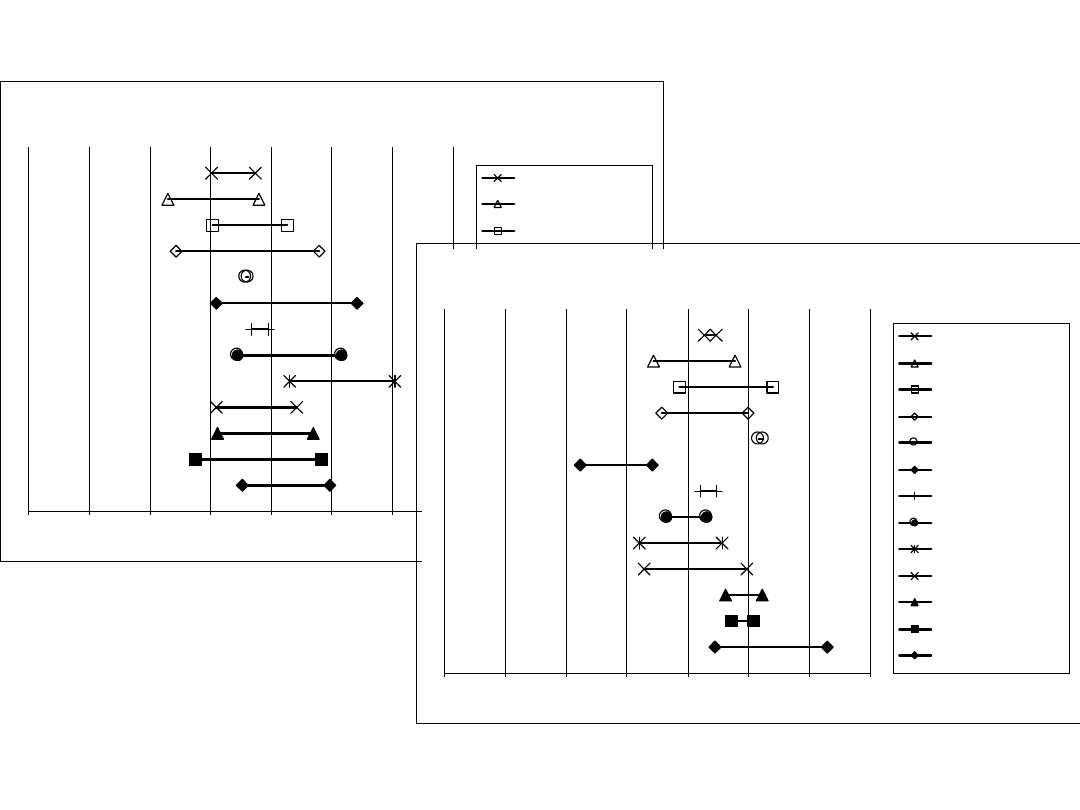
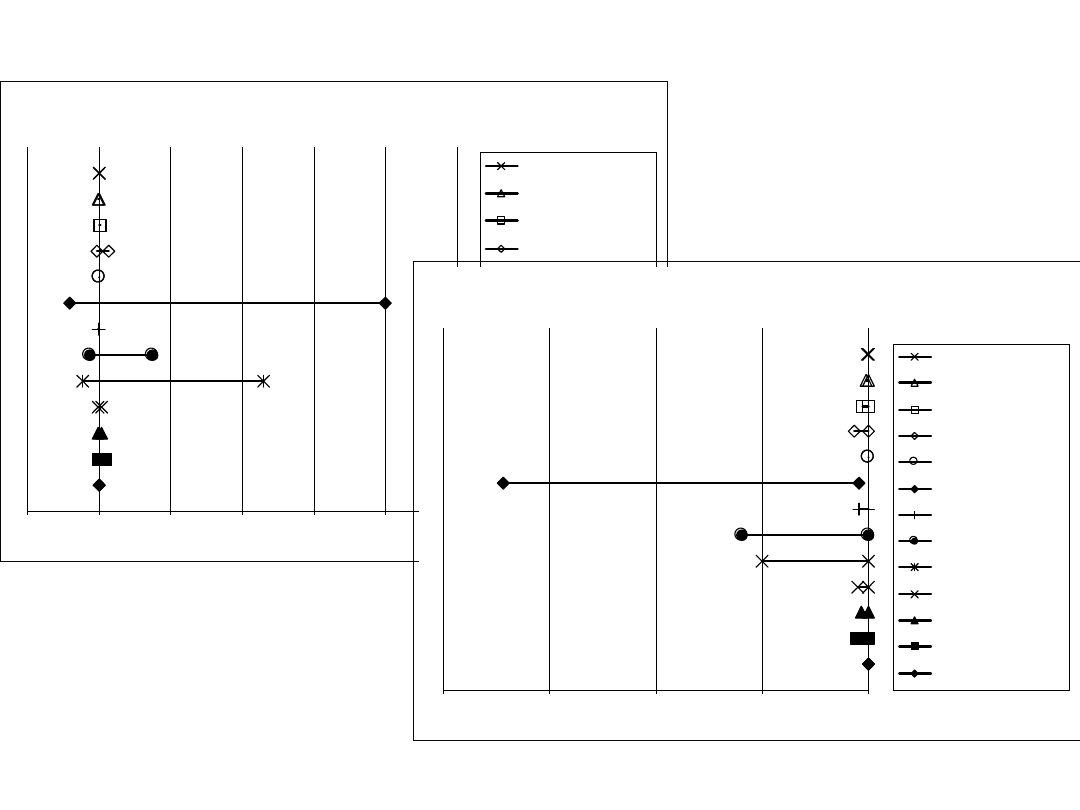
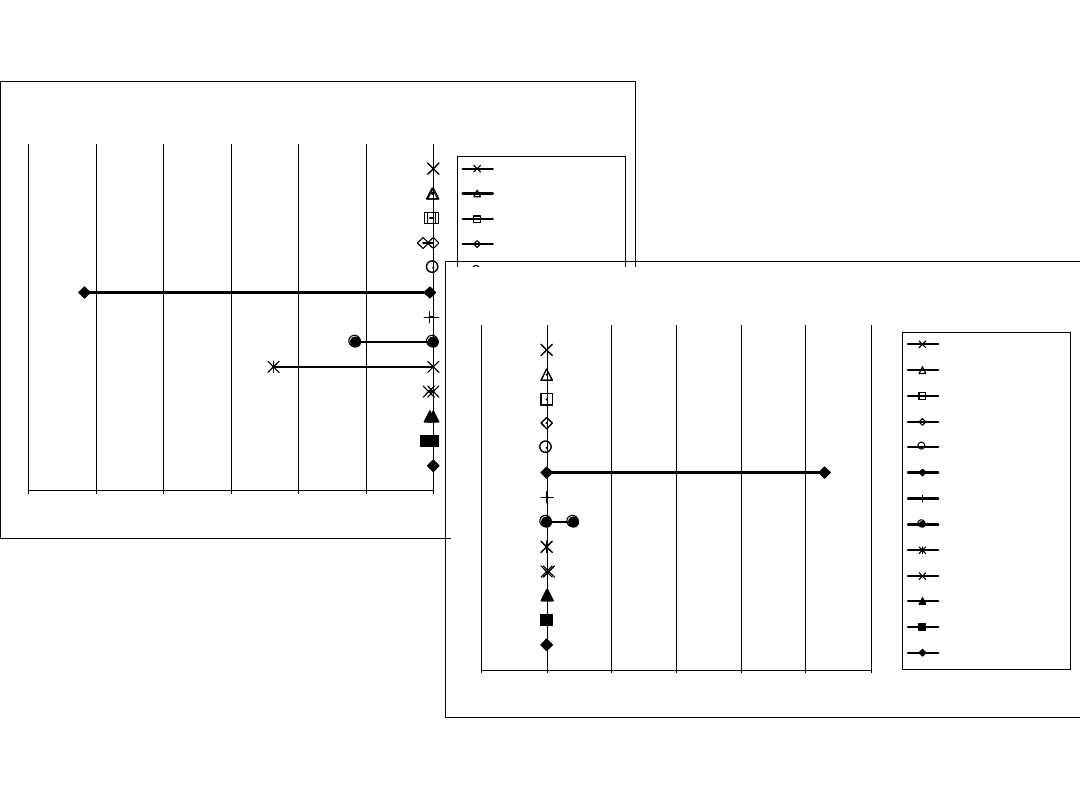
36
Współczynniki W8 i W9
Zakres zmienności współczynnika W8
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
Kształt 4
Kształt 3
Kształt 2
Kształt 1
Pięciokąt
Trójkąt rozwartokątny
Trójkąt równoramienny
Trójkąt prostokątny
Prostokąt
Trapez
Półkole
Elipsa
Kwadrat
Zakres zmienności współczynnika W9
0
0,2
0,4
0,6
0,8
1
1,2
1,4
Kształt 4
Kształt 3
Kształt 2
Kształt 1
Pięciokąt
Trójkąt rozwartokątny
Trójkąt równoramienny
Trójkąt prostokątny
Prostokąt
Trapez
Półkole
Elipsa
Kwadrat
37
Moment M1
Zakres zmienności współczynnika M1
0
0,2
0,4
0,6
0,8
Kształt 4
Kształt 3
Kształt 2
Kształt 1
Pięciokąt
Trójkąt rozwartokątny
Trójkąt równoramienny
Trójkąt prostokątny
Prostokąt
Trapez
Półkole
Elipsa
Kwadrat
Zakres zmienności współczynnika M1
0,15
0,2
0,25
0,3
0,35
0,4
0,45
0,5
Kształt 4
Kształt 3
Kształt 2
Kształt 1
Pięciokąt
Trójkąt rozwartokątny
Trójkąt równoramienny
Trójkąt prostokątny
Prostokąt
Trapez
Półkole
Elipsa
Kwadrat
Po usunięciu
trójkąta
rozwartokątnego
38
Momenty M2 i M3
Zakres zmienności współczynnika M2
0
0,05
0,1
0,15
0,2
0,25
0,3
Kształt 4
Kształt 3
Kształt 2
Kształt 1
Pięciokąt
Trójkąt rozwartokątny
Trójkąt równoramienny
Trójkąt prostokątny
Prostokąt
Trapez
Półkole
Elipsa
Kwadrat
Zakres zmienności współczynnika M3
0
50
100
150
200
250
300
350
Kształt 4
Kształt 3
Kształt 2
Kształt 1
Pięciokąt
Trójkąt rozwartokątny
Trójkąt równoramienny
Trójkąt prostokątny
Prostokąt
Trapez
Półkole
Elipsa
Kwadrat
39
Momenty M4 i M5
Zakres zmienności współczynnika M4
0
5
10
15
20
25
30
35
Kształt 4
Kształt 3
Kształt 2
Kształt 1
Pięciokąt
Trójkąt rozwartokątny
Trójkąt równoramienny
Trójkąt prostokątny
Prostokąt
Trapez
Półkole
Elipsa
Kwadrat
Zakres zmienności współczynnika M5
-1000
0
1000
2000
3000
4000
Kształt 4
Kształt 3
Kształt 2
Kształt 1
Pięciokąt
Trójkąt rozwartokątny
Trójkąt równoramienny
Trójkąt prostokątny
Prostokąt
Trapez
Półkole
Elipsa
Kwadrat
40
Moment M7
Zakres zmienności współczynnika M7
0
0,01
0,02
0,03
0,04
0,05
0,06
0,07
Kształt 4
Kształt 3
Kształt 2
Kształt 1
Pięciokąt
Trójkąt rozwartokątny
Trójkąt równoramienny
Trójkąt prostokątny
Prostokąt
Trapez
Półkole
Elipsa
Kwadrat
Zakres zmienności współczynnika M7
0,006
0,0065
0,007
0,0075
0,008
0,0085
0,009
0,0095
Kształt 4
Kształt 3
Kształt 2
Kształt 1
Pięciokąt
Trójkąt rozwartokątny
Trójkąt równoramienny
Trójkąt prostokątny
Prostokąt
Trapez
Półkole
Elipsa
Kwadrat
Po usunięciu
trójkąta
rozwartokątnego
41
Momenty M6 i M8
Zakres zmienności współczynnika M6
-2
0
2
4
6
8
10
Kształt 4
Kształt 3
Kształt 2
Kształt 1
Pięciokąt
Trójkąt rozwartokątny
Trójkąt równoramienny
Trójkąt prostokątny
Prostokąt
Trapez
Półkole
Elipsa
Kwadrat
Zakres zmienności współczynnika M8
-40
-30
-20
-10
0
Kształt 4
Kształt 3
Kształt 2
Kształt 1
Pięciokąt
Trójkąt rozwartokątny
Trójkąt równoramienny
Trójkąt prostokątny
Prostokąt
Trapez
Półkole
Elipsa
Kwadrat
42
Momenty M9 i M10
Zakres zmienności współczynnika M9
-12
-10
-8
-6
-4
-2
0
Kształt 4
Kształt 3
Kształt 2
Kształt 1
Pięciokąt
Trójkąt rozwartokątny
Trójkąt równoramienny
Trójkąt prostokątny
Prostokąt
Trapez
Półkole
Elipsa
Kwadrat
Zakres zmienności współczynnika M10
-0,005
0
0,005
0,01
0,015
0,02
0,025
Kształt 4
Kształt 3
Kształt 2
Kształt 1
Pięciokąt
Trójkąt rozwartokątny
Trójkąt równoramienny
Trójkąt prostokątny
Prostokąt
Trapez
Półkole
Elipsa
Kwadrat

43
Porównanie setek takich
rysunków i związanych z
nimi tabel wartości pozwala
na wyselekcjonowanie
najlepszych cech i na ocenę
ich jakości.
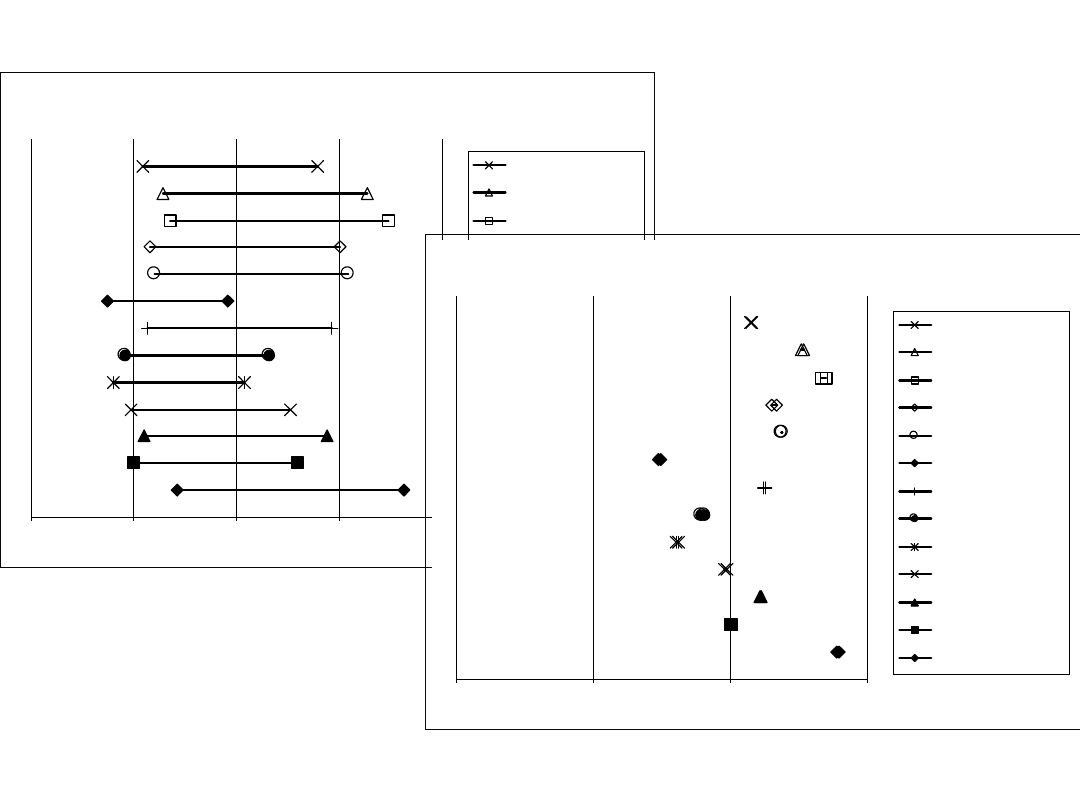
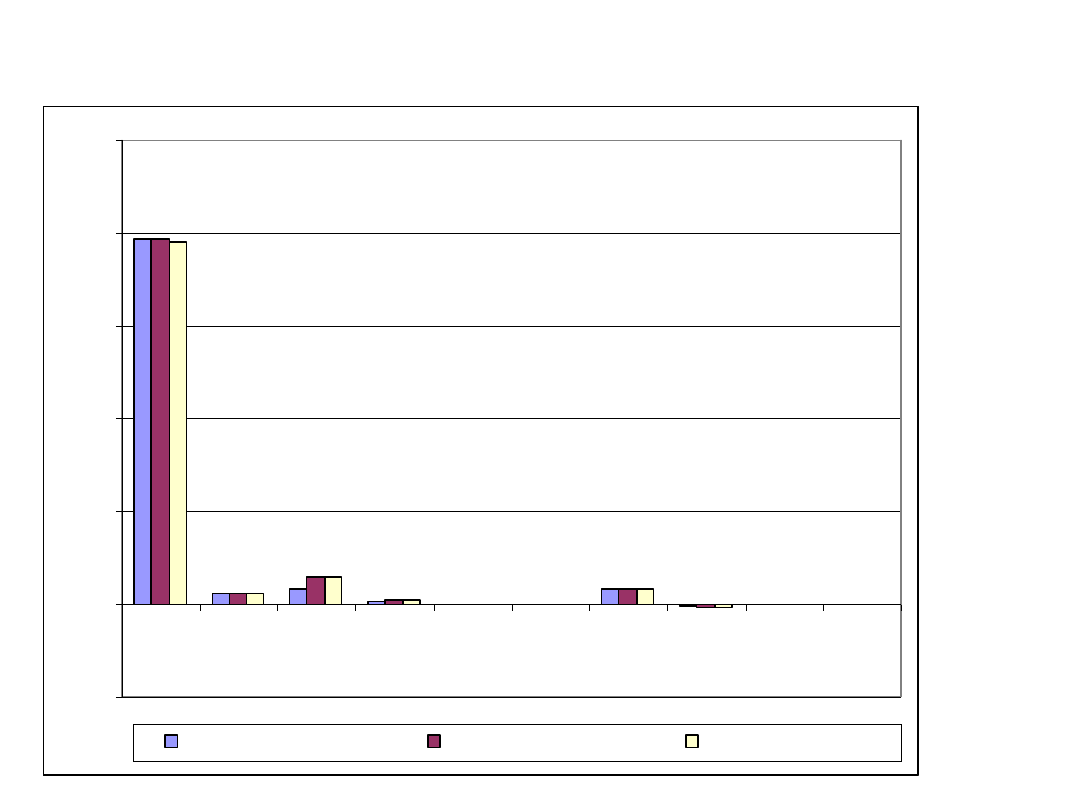
44
Wrażliwość współczynników kształtu na
zmianę skali:
0
20
40
60
80
100
120
140
160
180
W1
W2
W3
W4
W5
W6
W7
W8
W9
kształt 4 - podstawowy
kształt 4 - 130 procent
kształt 4 - 50 procent
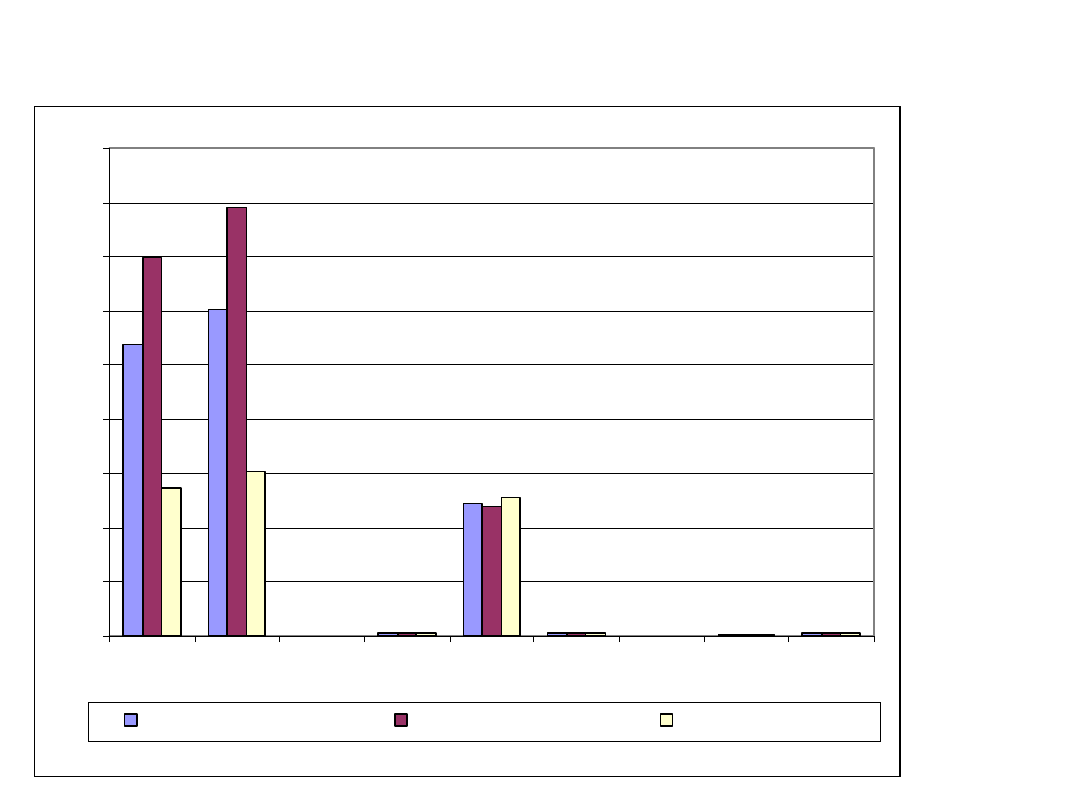
45
Niewrażliwość momentów na zmianę
skali:
-0,05
0
0,05
0,1
0,15
0,2
0,25
M1
M2
M3
M4
M5
M6
M7
M8
M9
M10
kształt 4 - podstawowy
kształt 4 - 130 procent
kształt 4 - 50 procent
46
Porównanie teoretycznych wartości kilku
przykładowych współczynników dla
wybranych figur geometrycznych:
W3
W4
Koło
Elipsa o
mimośrodzie
wynoszącym g
Wielokąt o m
bokach
Prostokąt o
stosunku boków
wynoszącym g
Kwadrat
Odcinek
5
,
1
g
g
1
75
,
0
1
m
tg
m
g
g
1
128
,
0
0
1
2
g
1
g
2
m
tg
3
1
m
ctg
m
0
977
,
0
2
g
1
g
6
47
cd:
W5
W6
Koło
Elipsa o
mimośrodzie
wynoszącym g
Wielokąt o m
bokach
Prostokąt o
stosunku boków
wynoszącym g
Kwadrat
Odcinek
274
,
28
?
?
0
36
105
,
0
m
tg
m
9
2
3
g
g
144
1
m
cos
m
sin
1
ln
m
tg
m
2
2
2
g
1
g
ln
g
g
1
1
ln
g
g
48
Parametry przykładowych obiektów:
pole
pole2(cm
2
)
obw
obw2(cm)
koło
10936
13,6101
370,84
13,083
kwadra
t
15129
18,8284
465,33
16,416
gwiazd
ka
324
0,4032
198,83
7,014
49
Parametry przykładowych obiektów-2:
pole
pole2(cm
2
)
obw
obw2(cm
)
koło2cm-
100
19504
12,5832
498,10
12,652
koło2cm-
200
77818
12,5513
988,61
12,555
koło2cm-
300
175044
12,5479
1482,27
12,550
50
Parametry przykładowych obiektów-3:
pole
pole2(cm
2
)
obw
obw2(cm
)
kwadrat5cm-
100
38811
25,0393
748,64
19,015
kwadrat5cm-
200
155233 25,0375
1491,9
2
18,947
kwadrat5cm-
300
349278 25,0378
2238,9
9
18,957
51
Parametry przykładowych obiektów-4:
pole
pole2(cm
2
)
obw
obw2(cm
)
trójkąt5cm-
100
19404
12,5187
634,43
16,114
trójkąt5cm-
200
77619
12,5192
1274,2
2
16,183
trójkąt5cm-
300
174640 12,5190
1909,7
6
16,169
52
Parametry przykładowych obiektów-5:
W1
W2
W3
W4
W8
W9
koło2cm-100 157,585
7
158,549
5
0,0061
1,0000
0,3151
99
0,9939
koło2cm-200 314,771
3
314,684
8
-0,0003
1,0000
0,3166
06
1,0003
koło2cm-300 472,094
2
471,820
1
-0,0006
1,0000
0,3177
57
1,0006
kwadrat5cm-
100
222,296
4
238,300
0
0,0720 0,9772 0,2631
43
0,9328
kwadrat5cm-
200
444,577
1
474,893
0
0,0682 0,9772 0,2634
19
0,9362
kwadrat5cm-
300
666,869
2
712,693
0
0,0687 0,9772 0,2635
12
0,9357
trójkąt5cm-
100
157,181
2
201,944
7
0,2848 0,7217 0,3074 0,7783
trójkąt5cm-
200
314,368
5
405,596
5
0,2902 0,7237 0,3084 0,7751
trójkąt5cm-
300
471,549
1
607,894
8
0,2891 0,7217 0,3084 0,7757
53
Parametry przykładowych obiektów-6:
M1
M2
M3
M4
M5
M6
koło2cm-100 0,15915
6
0,0253
31
1,53E-
11
3,56E-
12
-3,23E-
27
2,95E-
26
koło2cm-200 0,15915
5
0,0253
31
5,37E-
11
8,89E-
13
1,18E-
31
-3,83E-
26
koło2cm-300 0,15915
5
0,0253
30
2,08E-
11
2,11E-
12
-1,32E-
29
-2,07E-
21
kwadrat5cm-
100
0,16667
1
0,0277
79
1,66E-
10
1,84E-
11
-1,02E-
21
-1,22E-
20
kwadrat5cm-
200
0,16666
2
0,0277
76
2,54E-
11
2,87E-
12
-6,67E-
24
-5,17E-
18
kwadrat5cm-
300
0,16666
5
0,0277
77
5,06E-
12
5,67E-
13
-2,64E-
25
-4,65E-
19
trójkąt5cm-
100
0,19443
4
0,0378
05
6,85E-
04
2,76E-
05
9,86E-
09
7,67E-
07
trójkąt5cm-
200
0,19444
8
0,0378
10
6,86E-
04
2,74E-
05
9,79E-
09
7,62E-
07
trójkąt5cm-
300
0,19444
3
0,0378
08
6,86E-
04
2,75E-
05
9,79E-
09
7,63E-
07
54
Parametry przykładowych obiektów-7:
M7
M8
M9
M10
ci
cj
koło2cm-100 0,00633
3
-2,14E-
12
-1,93E-
13
-3,69E-
24
118,5
0
118,5
0
koło2cm-200 0,00633
3
-2,56E-
11
-9,01E-
13
-1,14E-
23
236,5
2
236,5
0
koło2cm-300 0,00633
3
-7,28E-
12
-2,28E-
13
-7,69E-
24
354,5
1
354,4
9
kwadrat5cm-
100
0,00694
5
-1,84E-
11
-1,54E-
12
3,51E-
26
158,0
0
157,9
9
kwadrat5cm-
200
0,00694
4
-2,84E-
12
-2,36E-
13
3,68E-
25
315,5
0
315,5
0
kwadrat5cm-
300
0,00694
4
-5,64E-
13
-4,68E-
14
1,91E-
26
473,0
0
473,0
0
trójkąt5cm-
100
0,00925
8
-5,76E-
04
-2,74E-
05
1,11E-
13
170,8
3
137,9
9
trójkąt5cm-
200
0,00926
0
-5,76E-
04
-2,74E-
05
7,28E-
15
341,1
7
276,0
0
trójkąt5cm-
300
0,00925
9
-5,76E-
04
-2,74E-
05
1,39E-
15
512,5
0
414,0
0
00
10
m
m
x
~
00
01
m
m
y
~
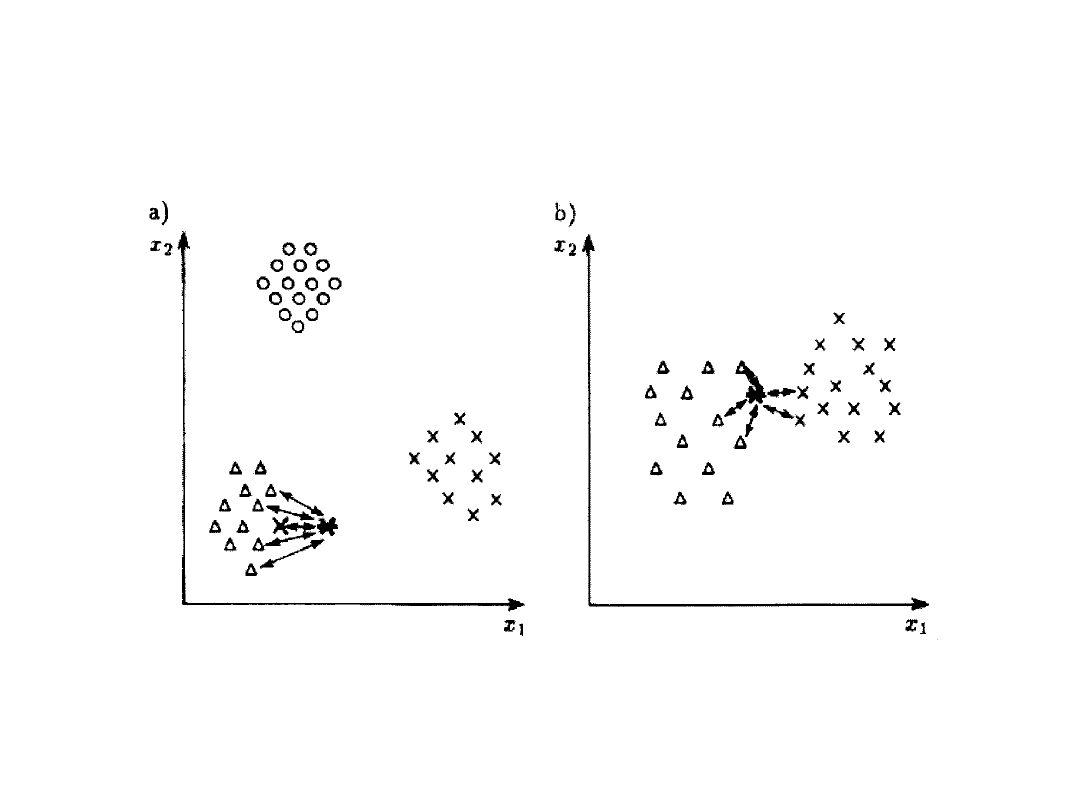
55
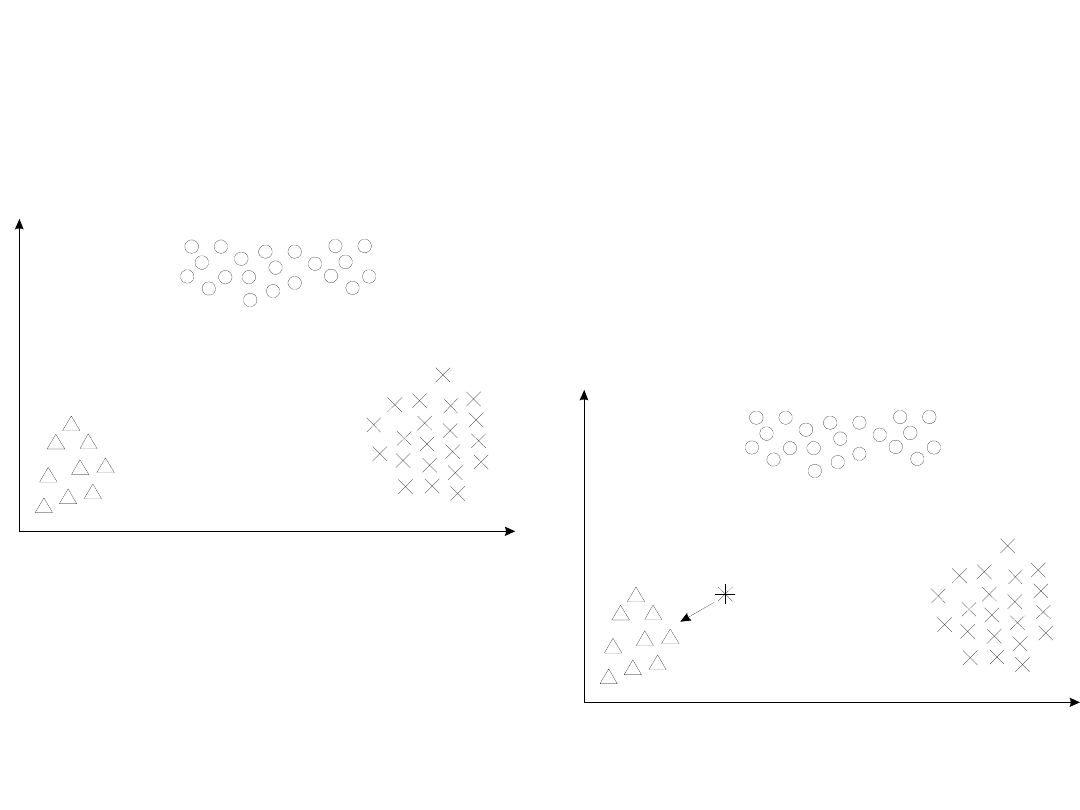
Metody minimalnoodległościowe
x
2
x
1
x
2
x
1
Dwuwymiarowa przestrzeń
cech:
Podejmowanie decyzji
w metodzie NN:
56
Stosowane metryki (normy):
- metryka
euklidesowa:
- metryka euklidesowa z
wagą:
- metryka uliczna:
- metryka
Czebyszewa:
n
1
2
1
x
x
)
x
,
x
(
n
1
2
2
x
x
)
x
,
x
(
n
1
3
x
x
)
x
,
x
(
x
x
max
)
x
,
x
(
1
5
gdzie wagi określane
np. na przedziale
zmienności:
x
min
x
max
1
U
x
U
x
57
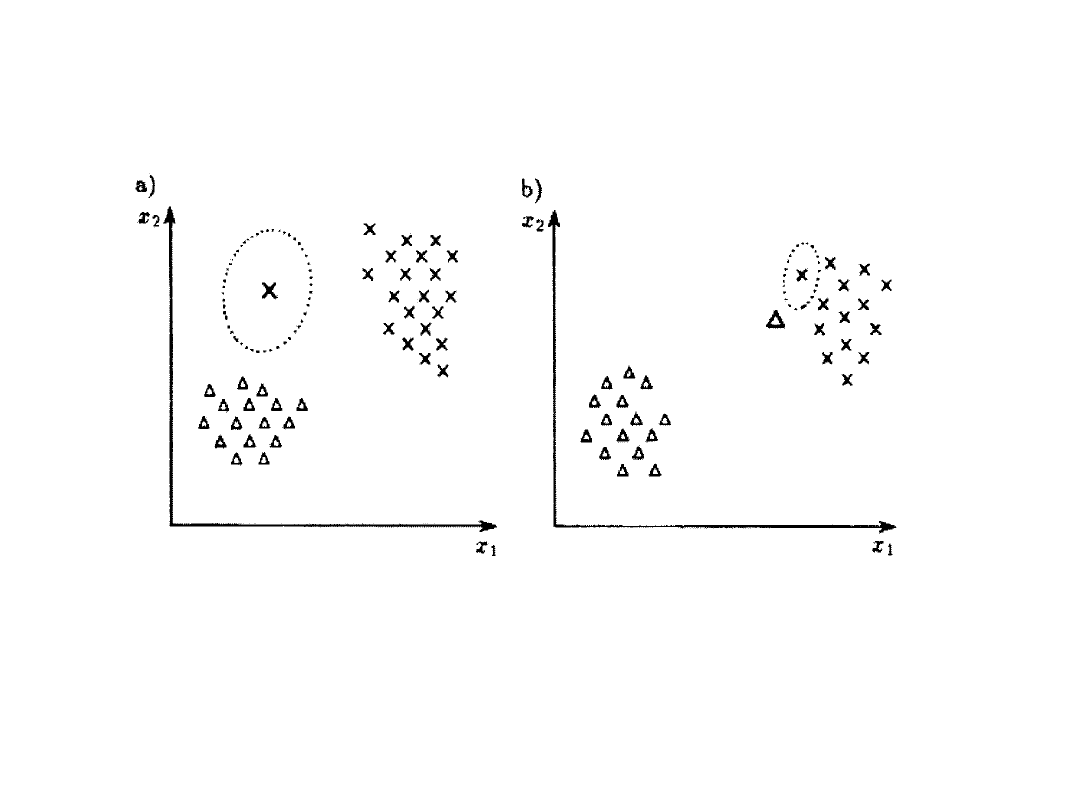
W przypadku gdy położenie (a) lub sklasyfikowanie
(b) chociaż jednego obiektu ciągu uczącego jest
błędne.
Podejmowanie błędnych decyzji:
58
Zapobiega błędom wynikającym z pomyłek w ciągu
uczącym (a), ale ogranicza czułość metody (b).:
Metoda αNN:
Parametr α jest wybierany tak
aby:
W praktyce α jest małą liczbą
całkowitą.
i
I
i
N
min
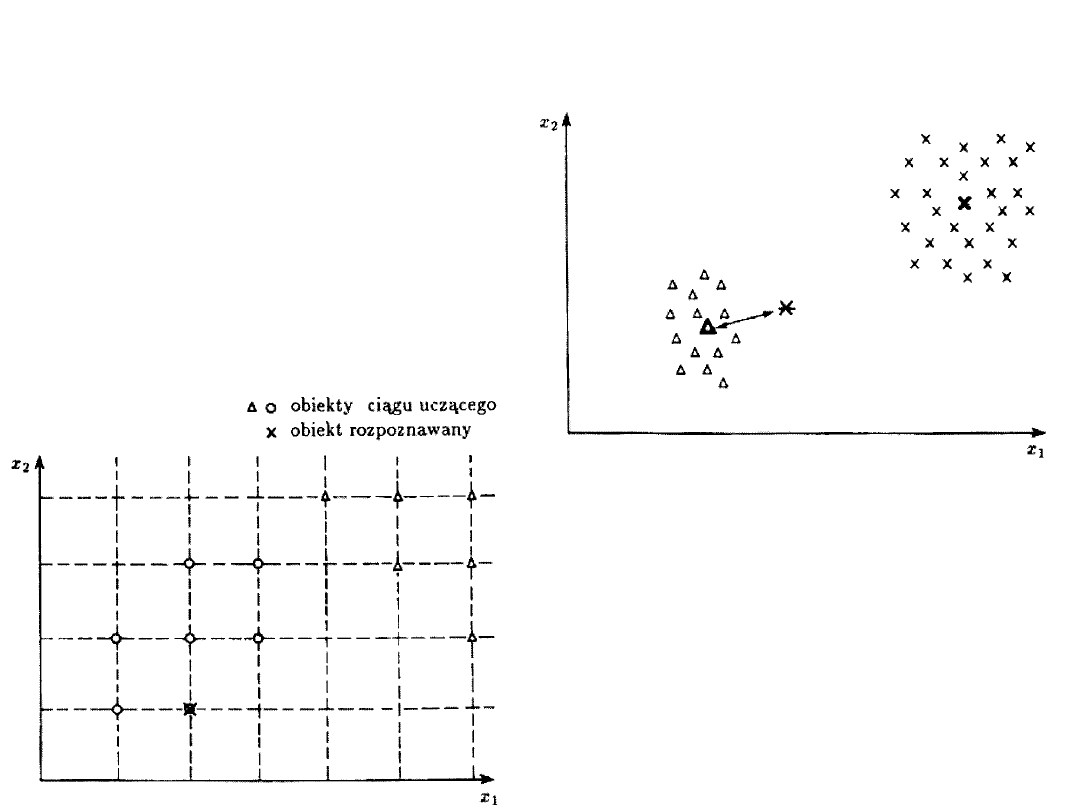
59
Metody wzorców:
Ilustracja pojęcia wzorca:
Przy dyskretnych cechach
prawdopodobieństwo rozpoznania
metodą pokrycia punktów jest
bardzo duże
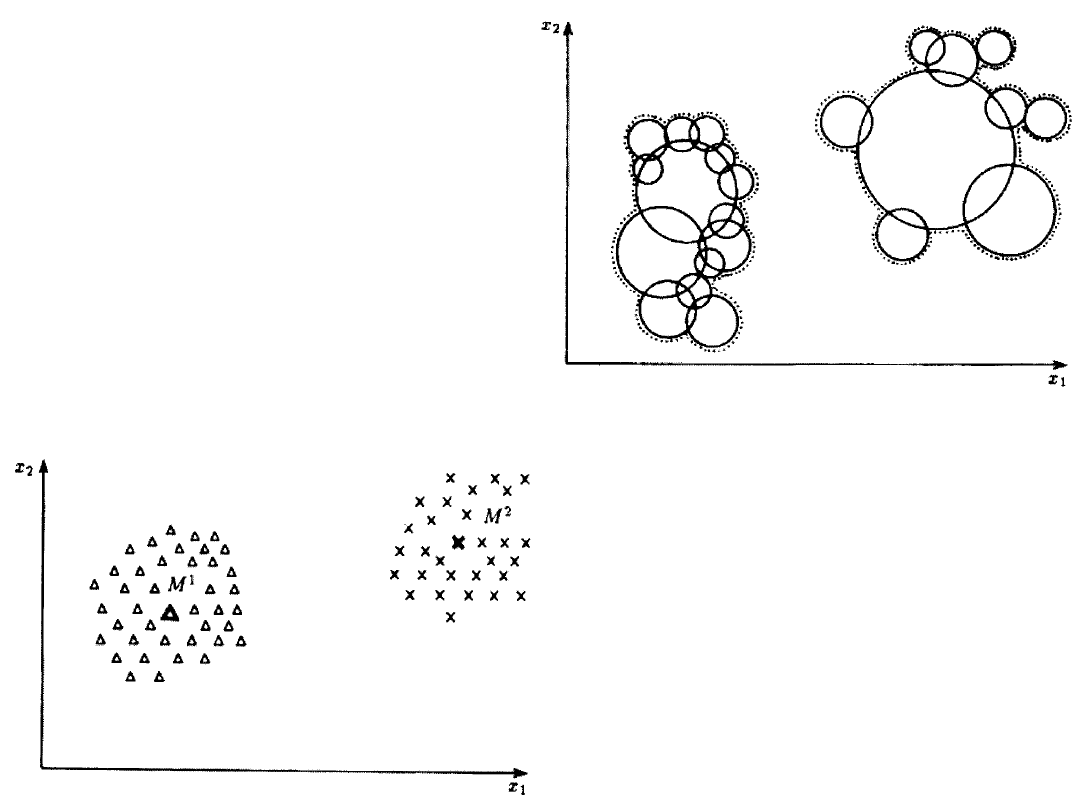
60
Otoczenia kuliste o różnych
promieniach pozwalają
bardzo dokładnie
odwzorować kształty
obszarów o różnej
topografii.
Metoda NM (najbliższej
mody):
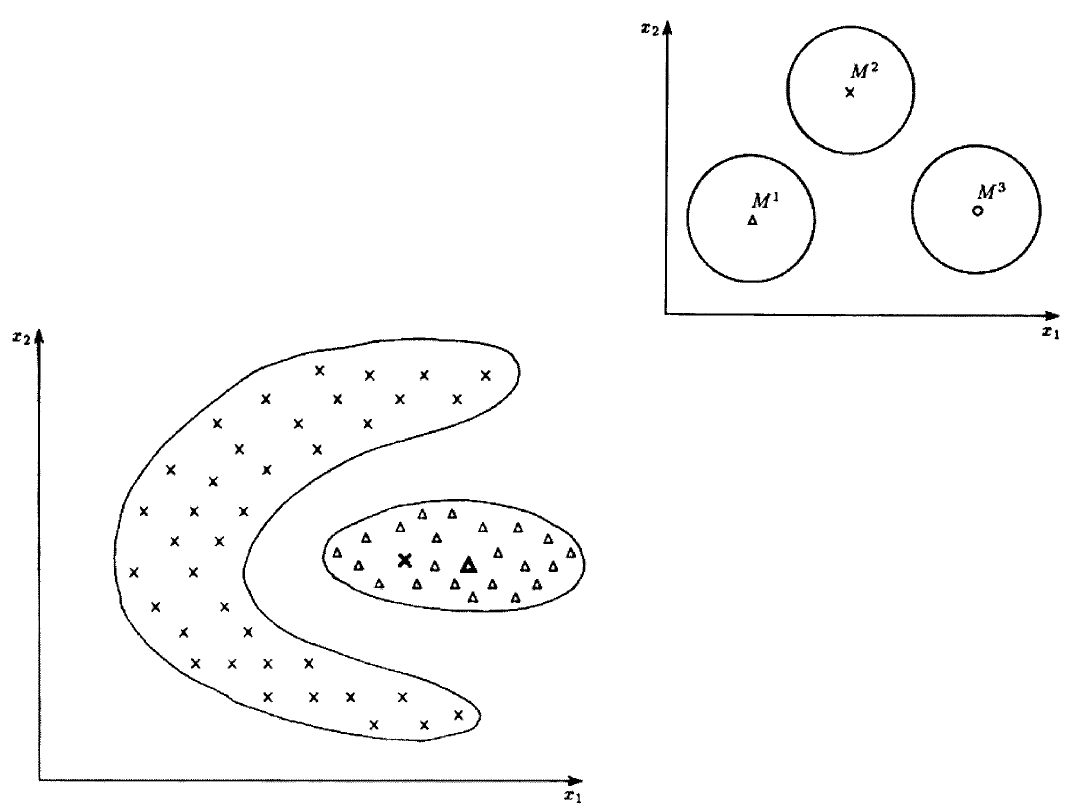
61
Przykłady klas, dla
których średnia nie jest
dobrym wzorcem dla
całej klasy.
Przyjęcie mody M jako
środka ciężkości obiektów
rozważanych klas bywa
bardzo dobrym rozwiązaniem
w przypadku klas o
regularnych i stosunkowo
prostych kształtach:
62
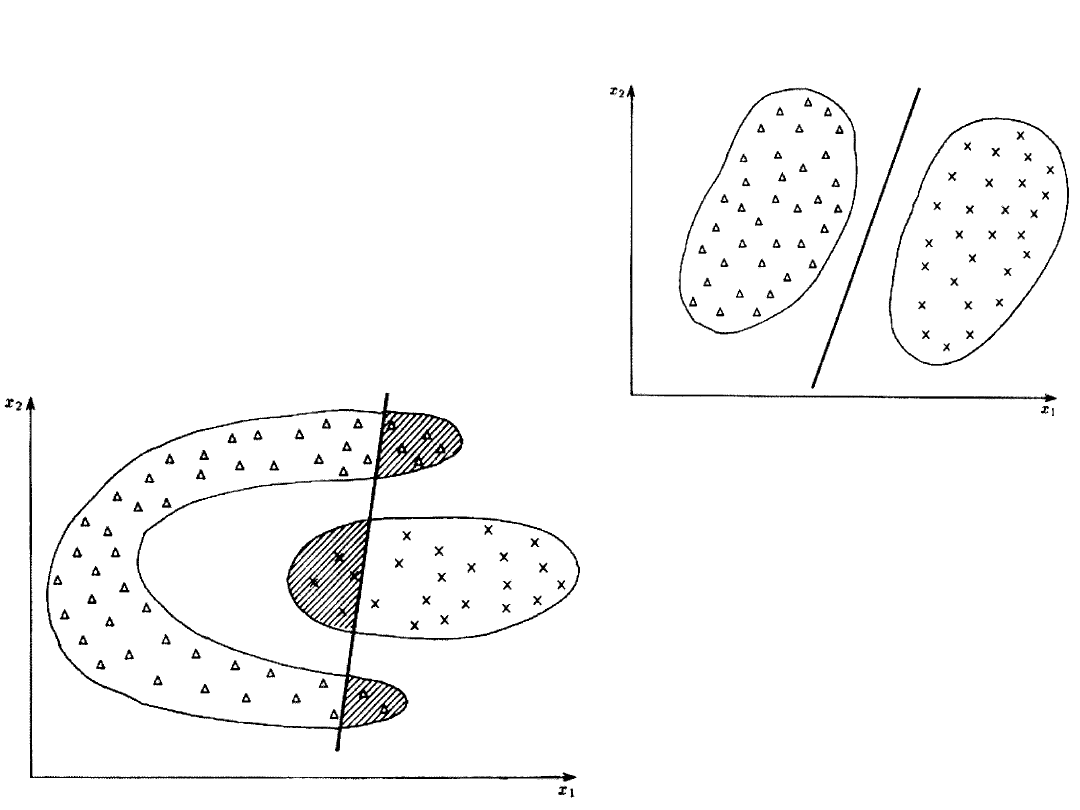
Metody aproksymacyjne:
Przykład liniowej
separowalności klas:
Przykład zadania,
które nie jest liniowo
separowalne:
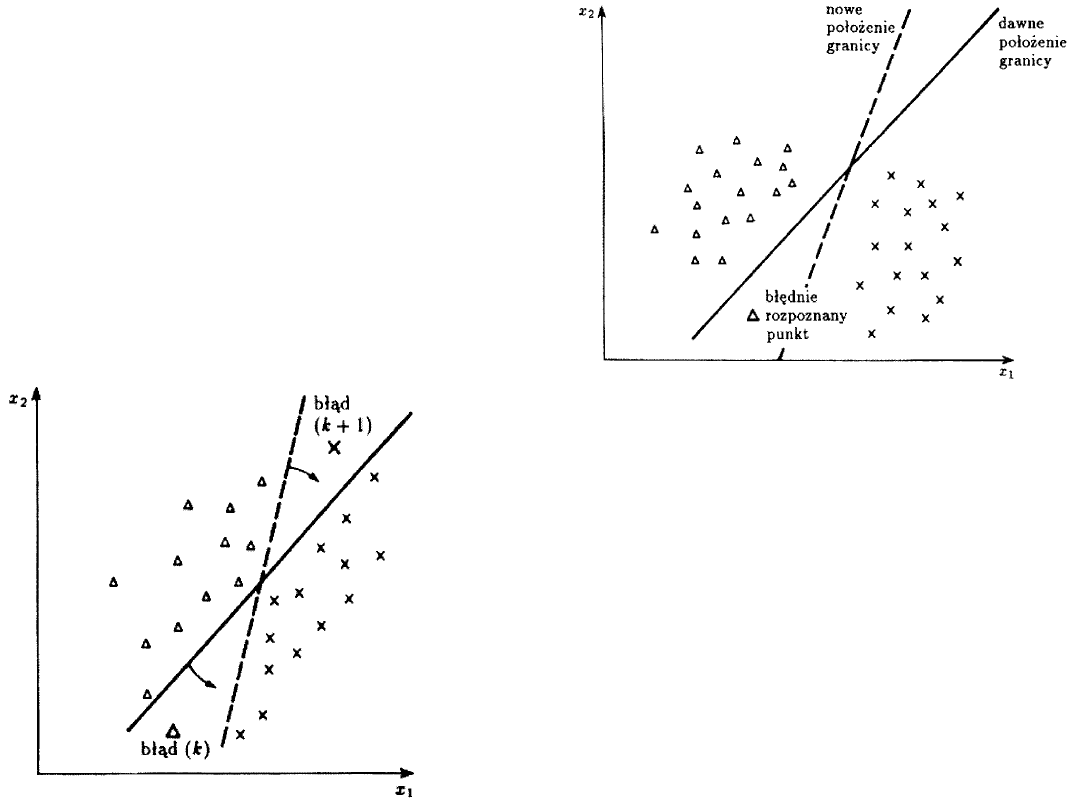
63
Proces uczenia
polegający na
przemieszczaniu
granicznej
płaszczyzny:
Poprawka położenia
linii granicznej
spowodowana przez
jeden błędnie
sklasyfikowany punkt:
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
- Slide 44
- Slide 45
- Slide 46
- Slide 47
- Slide 48
- Slide 49
- Slide 50
- Slide 51
- Slide 52
- Slide 53
- Slide 54
- Slide 55
- Slide 56
- Slide 57
- Slide 58
- Slide 59
- Slide 60
- Slide 61
- Slide 62
- Slide 63
Wyszukiwarka
Podobne podstrony:
04 Rozpoznawanie, składowanie i zabezpieczanie drewna
04 Rozpoznawanie i dobieranie t Nieznany (2)
o1 04 u rozpoznawanie i składowanie drewna 311[32]
04 Rozpoznawanie podzespołów stosowanych w maszynach
04 Rozpoznawanie, składowanie i zabezpieczanie drewna
04 Rozpoznawanie materiałów konstrukcyjnych
04 Rozpoznawanie i dobieranie tworzyw skóropodobnych
Wykład 04
04 22 PAROTITE EPIDEMICA
04 Zabezpieczenia silnikówid 5252 ppt
Czynności kontrolno rozpoznawcze w zakresie nadzoru nad przestrzeganiem przepisów
Wyklad 04
Wyklad 04 2014 2015
Pojęcie i istota rozpoznania wojskowego
04 WdK
więcej podobnych podstron