
Mechanika
Mechanika
Ogólna
Ogólna
Statyka
Statyka
Wykład VIII
Wykład VIII
Metoda wieloboku sznurowego
Metoda wieloboku sznurowego
Adam F.
Adam F.
Bolt
Bolt

Wykład VIII
Wykład VIII
Zastosowanie wieloboku sznurowego do
redukcji płaskiego układu sił
Zastosowanie wieloboku sznurowego do
wyznaczania momentów sił
Zastosowanie wieloboku sznurowego do
wyznaczania reakcji w belkach
przegubowych
Metoda wieloboku
Metoda wieloboku
sznurowego
sznurowego

Zastosowanie wieloboku
sznurowego do redukcji
płaskiego układu sił

Metoda wieloboku sznurowego
stosowana jest w statyce wykreślnej
przy wyznaczaniu sił wypadkowych,
reakcji podpór i wykresów momentów
gnących.
Wielobok sznurowy ma taką samą
postać, jaką przybiera pod działaniem
układu sił, zamocowany na końcach,
napięty, doskonale wiotki i nieważki
sznur.
Ciała wiotkie jak cięgna, sznury, nici
itp. :
mogą być tylko rozciągane, bo
powstają w nich reakcje nie
pozwalające na oddalenie się ich
końców.
nie mogą być ściskane, bo nie
mogą powstać reakcje
uniemożliwiające zbliżenie się tych
końców.
Ciała sypkie, jak piasek:
mogą być tylko ściskane.
Ciała sztywne, np. pręty,
mogą być rozciągane i ściskane.
Należy przyponinieć, że:
Wielobok sznurowy: a) plan sił, b)
wielobok sił

Wielobok
sznurowy:
Dowolny płaski układ sił można zastąpić
przez dwie siły, działające wzdłuż skrajnych
boków wieloboku sznurowego.
Wartości tych sił są wyrażone przez
długości odpowiednich promieni wieloboku
sił, a zwroty są takie, że wektorowa suma
tych sił jest równa wektorowi głównemu R.
Linia działa nia wypadkowej W = R
przechodzi przez punkt przecięcia
skrajnych boków wieloboku sznurowego.
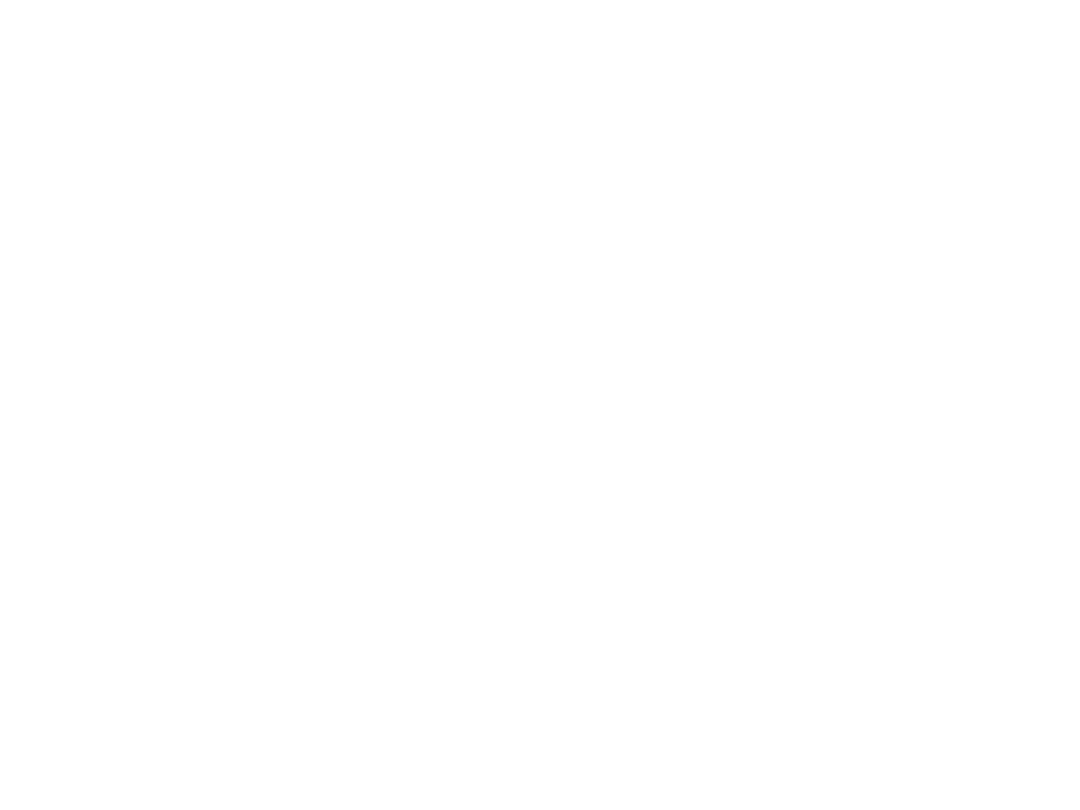
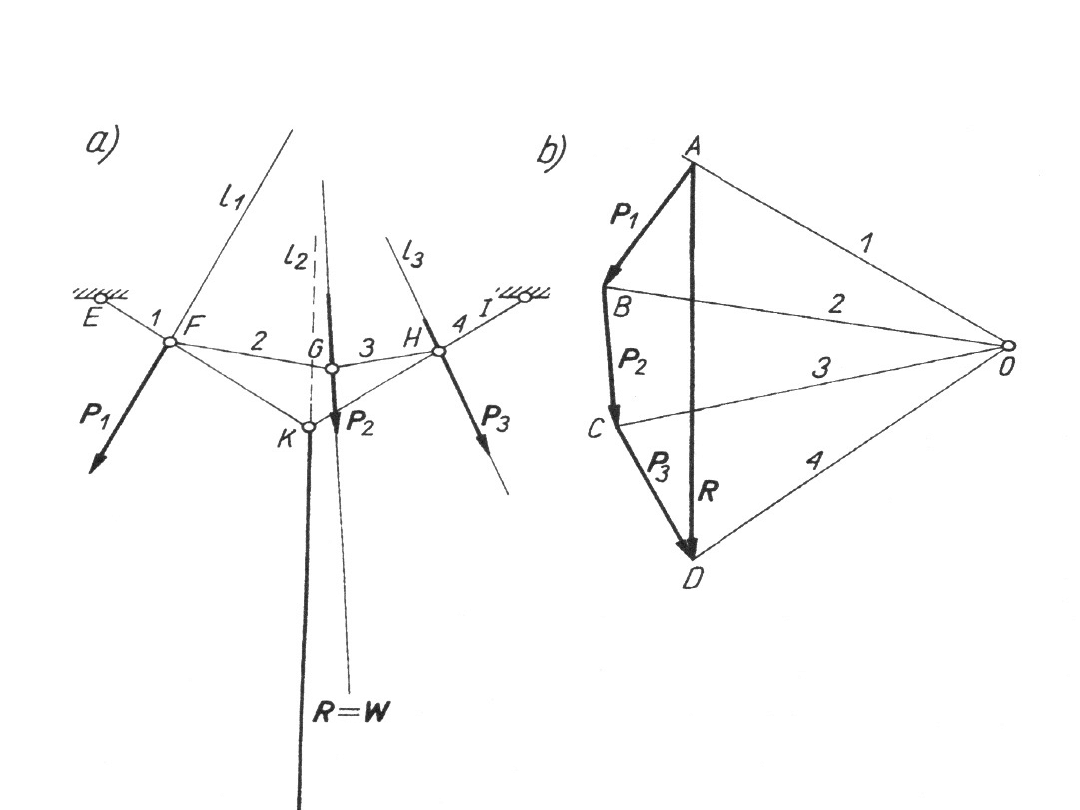
Wyznaczenie siły wypadkowej metodą
wieloboku sznurowego: a) plan sił, b)
wielobok sił
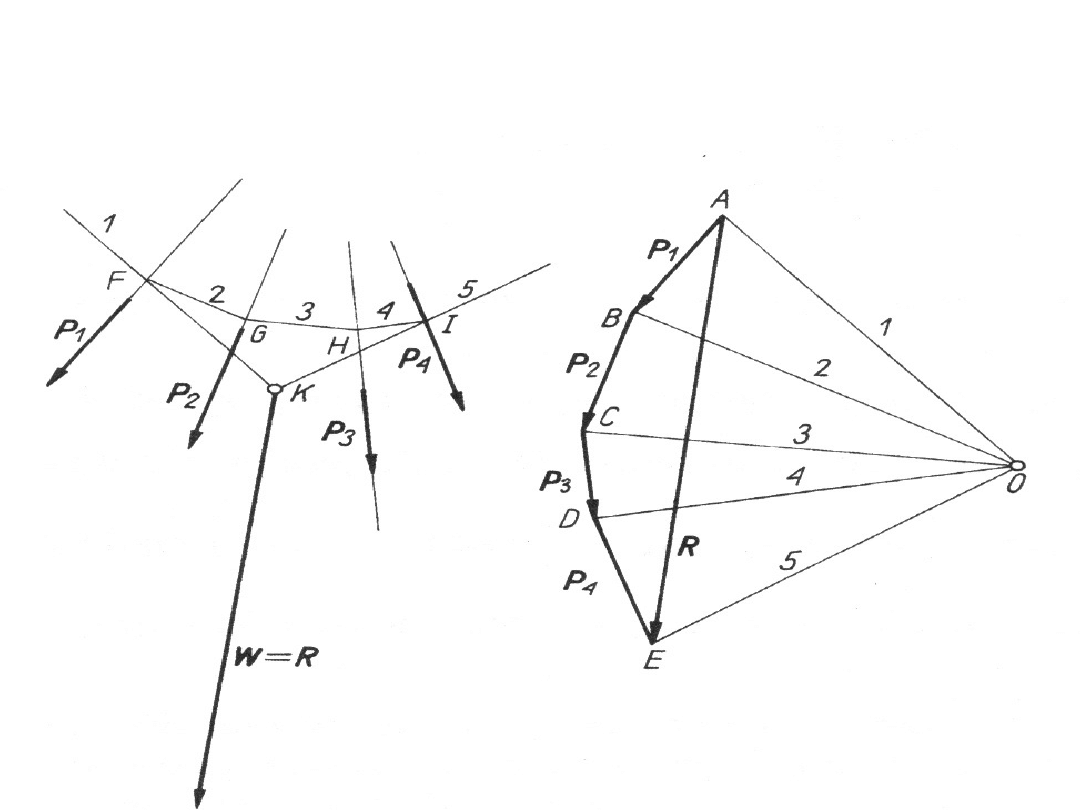
Redukcja płaskiego układ sił metodą
wieloboku sznurowego:
a) redukcja do pary sił, b) układ jest w
równowadze

Przy redukcji płaskiego układu sił mogą
występować następujące przypadki:
1. Wielobok sił nie zamyka się — układ
sił redukuje się do jednej siły wy
padkowej.
2. Wielobok sił zamyka się, a wielobok
sznurowy nie zamyka się — układ sił
redukuje się do pary sił.
3. Wielobok sił zamyka się i wielobok
sznurowy również się zamyka — układ
sił znajduje się w równowadze.
Wyznaczanie reakcji podpór metodą
wieloboku sznurowego:
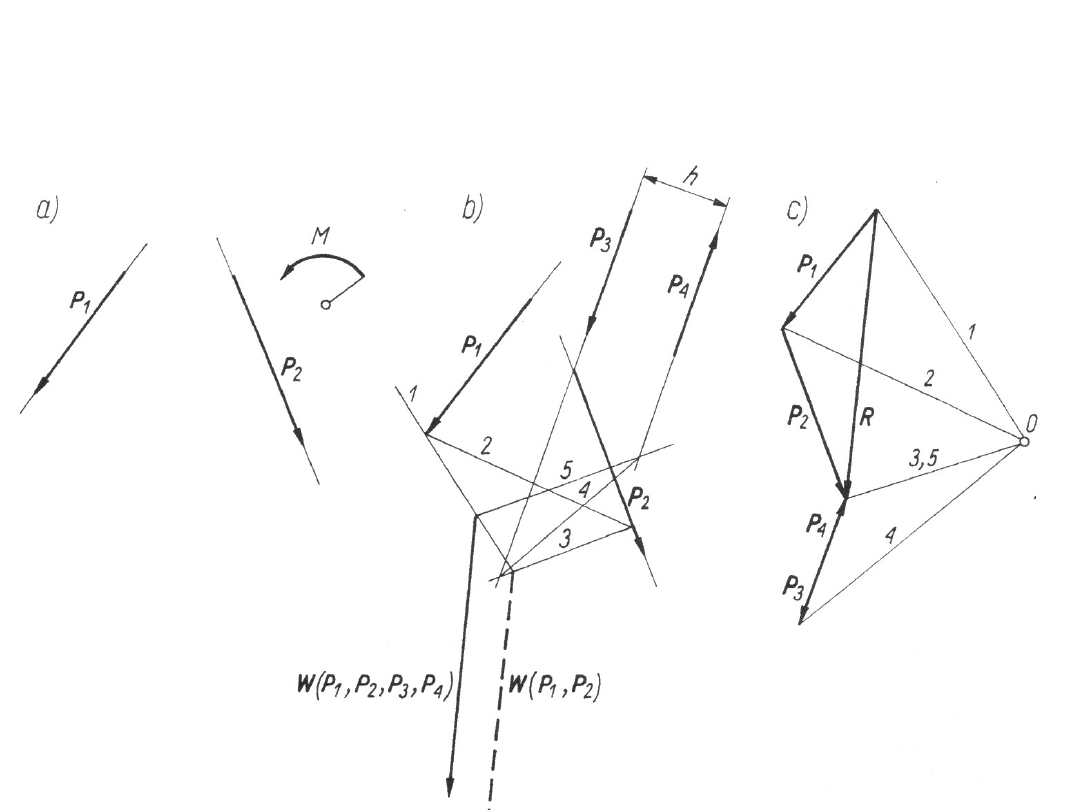
Wyznaczanie wypadkowej układu złożonego
z sił P
1
, P
2
i z pary sił o momencie M

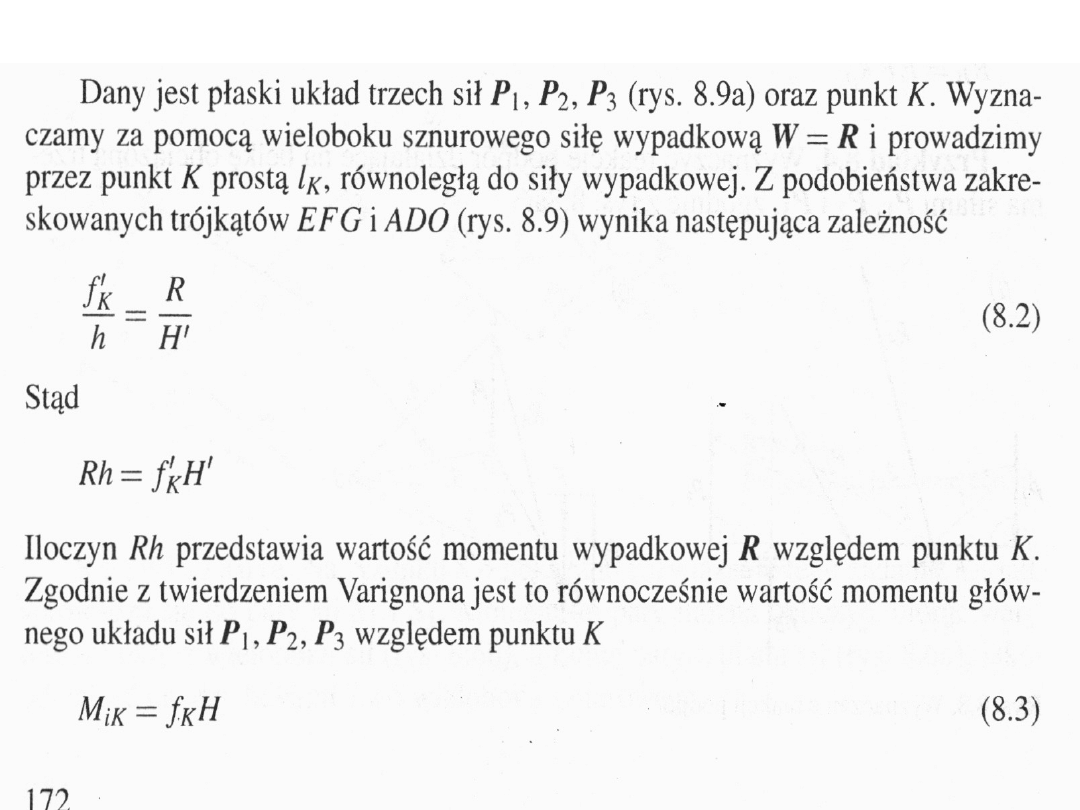
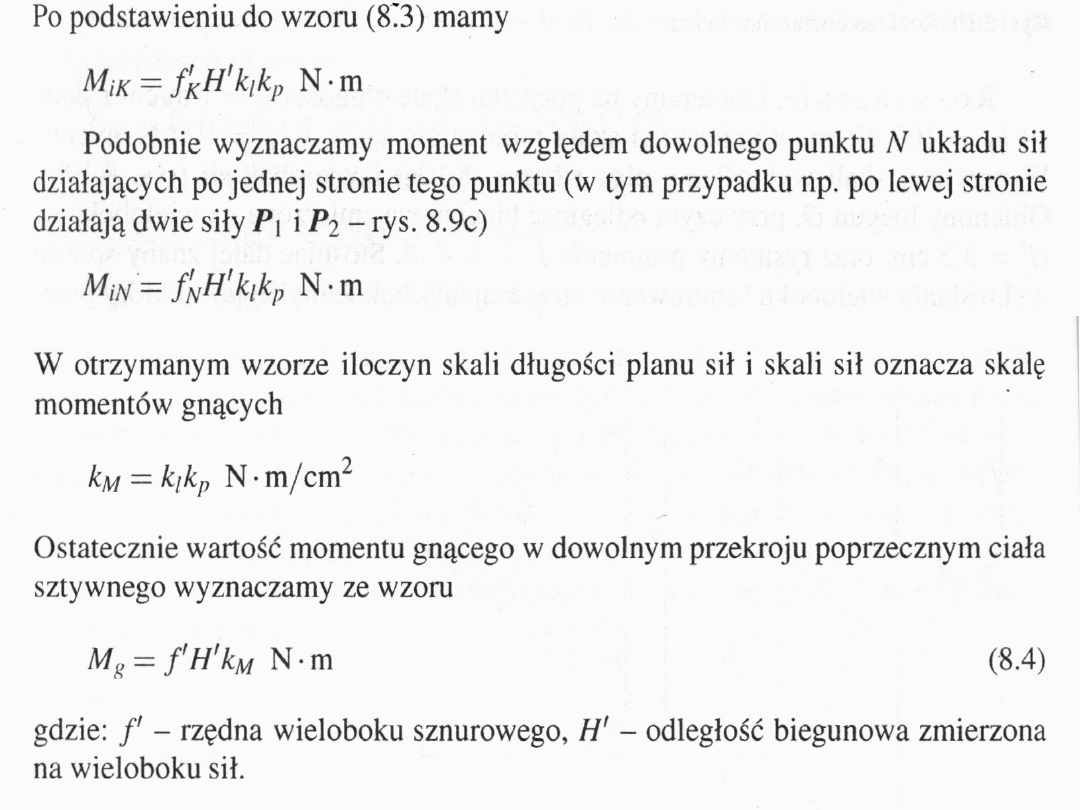
Wyznaczenie momentów sił
metodą wieloboku sznurowego
Momentem gnącym w danym przekroju
ciała nazywamy składową styczną sumy
geometrycznej momentów wszystkich sił
zewnętrznych działających tylko po jednej
stronie tego przekroju, względem środka
ciężkości.
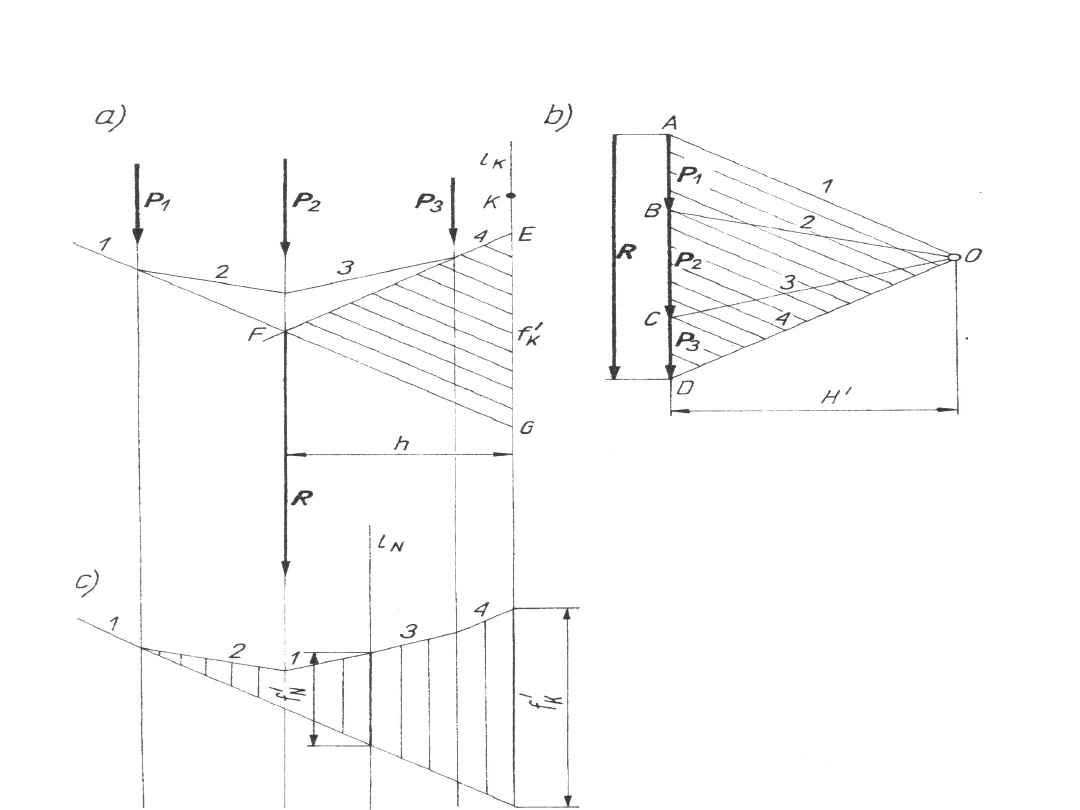
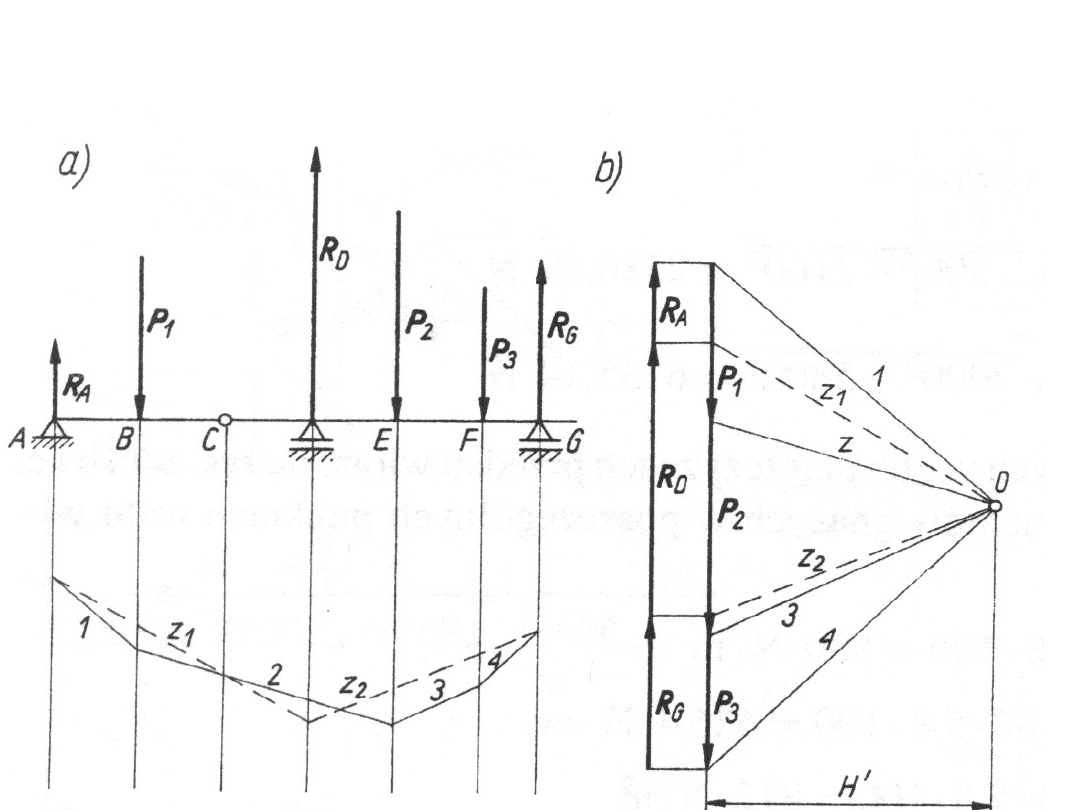
Wyznaczenie momentów metodą wieloboku
sznurowego
Wyznaczenie momentów metodą wieloboku
sznurowego
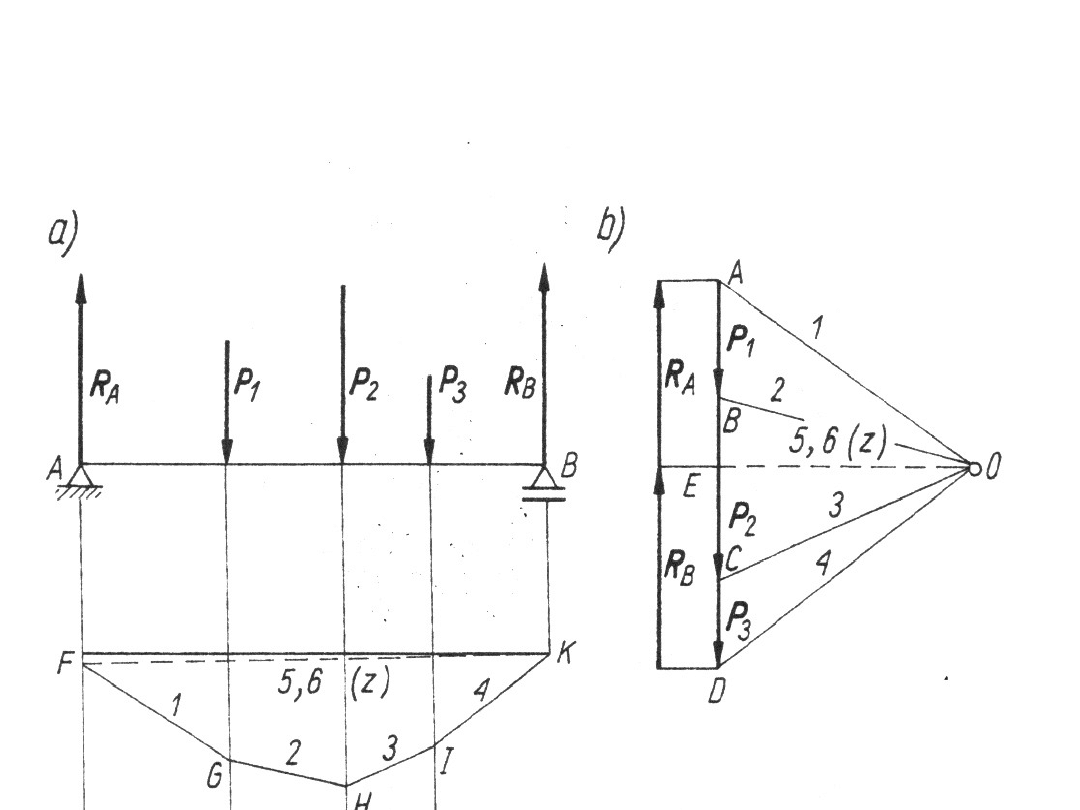
Wyznaczenie reakcji belki przegubowej metodą
Wyznaczenie reakcji belki przegubowej metodą
wieloboku sznurowego
wieloboku sznurowego

Warunek, aby zamykająca przecinała
wielobok sznurowy pod przegubem, wynika
z zerowania się momentu pochodzącego od
sił R
A
i P
1
obliczonego względem tego
przegubu.
Do podobnego wniosku można dojść,
rozdzielając belkę AF na dwie belki AC i CF.
Wartości reakcji obliczamy na podstawie
wzoru (8.1), po zmierzeniu odpowiednich
boków wieloboku sił i uwzględnieniu skali
sil.
Wielobok sznurowy dla tej belki ma dwie
zamykające z
1
i z
2
, przebiegające między
liniami działania kolejnych oddziaływań,
przy czym zamykająca z przecina wielobok
sznurowy pod przegubem C.
Wyznaczenie reakcji w belce z dwoma
Wyznaczenie reakcji w belce z dwoma
przegubami metodą wieloboku sznurowego
przegubami metodą wieloboku sznurowego
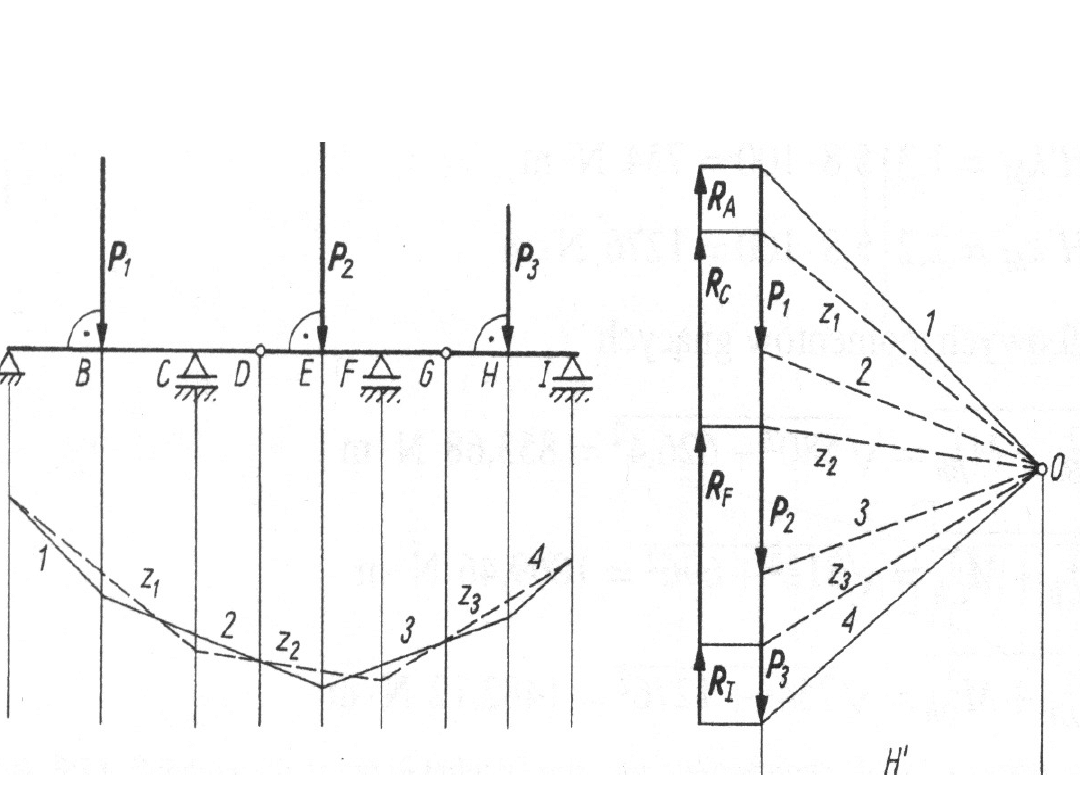
Przykład rozwiazania belki zdwoma przegubami
Przykład rozwiazania belki zdwoma przegubami
metodą wieloboku sznurowego
metodą wieloboku sznurowego
Wielobok sznurowy tej belki ma trzy
zamykające z
1
z
2
i z
3
.
Zamykające z
2
i z
3
przecinają wielobok
sznurowy odpowiednio pod przegubami D i
G.
Również w tym przypadku wartości reakcji
R
A
, R
C
R
F
i R
I
obliczamy na podstawie wzoru
(8.1).

DZIĘKUJĘ
DZIĘKUJĘ
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
Wyszukiwarka
Podobne podstrony:
WYKŁAD Mechanika Ogólna Część IV
WYKŁAD Mechanika Ogólna Część VII
WYKŁAD Mechanika Ogólna Część III
WYKŁAD Mechanika Ogólna Część II
WYKŁAD Mechanika Ogólna Część V
WYKŁAD Mechanika Ogólna Część Xi XI
WYKŁAD Mechanika Ogólna Część VI
WYKŁAD Mechanika Ogólna Część IV
WYKŁAD Mechanika Ogólna Część VII
MachBarwi2, Politechnika, Sprawozdania, projekty, wyklady, Mechanika Ogolna
Strona tytułowa mechanika komputerowa, Politechnika, Sprawozdania, projekty, wyklady, Mechanika Ogol
więcej podobnych podstron