
Ocena jakości układów
regulacji
Podstawowym
wymaganiem
stawianym
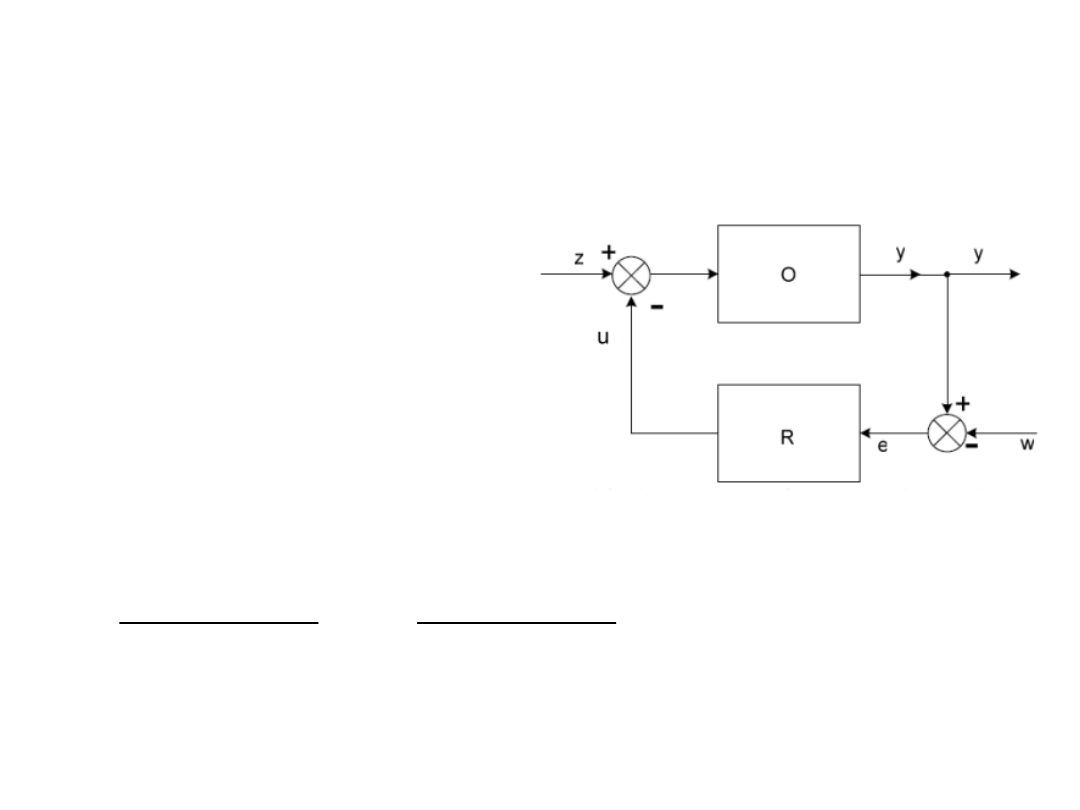
układowi regulacji jest uzyskanie na jego
wyjściu sygnału y(t) odpowiednio bliskiemu
przebiegowi wartości zadanej w(t).
Uchyb regulacji e(t) będący różnicą pomiędzy
wartością zadana a regulowaną może być
wywołany
wieloma
przyczynami,
np.
zakłóceniami,
zmiana
wartości
zadanej,
zmiana parametrów układu itd. i wynosi:
e(t)=w(t)-y(t)

Ocena jakości układów
regulacji
Ocena jakości polega na analizie dwóch stanów układu
regulacji:
1)Stanu przejściowego,
2)Stanu ustalonego
W pierwszym przypadku mówimy o dokładności dynamicznej, a
w drugim o dokładności statycznej.
Dokładność dynamiczna określa zdolność układu do
wiernego i szybkiego śledzenia zmiany wartości zadanej.
Dokładność statyczna określa zdolność układu do
utrzymywania wartości regulowanej jak najbliżej wartości
zadanej w stanie ustalonym, czyli po zakończeniu stanu
przejściowego.
Uchyb ogólny można wiec złożyć z uchybu ustalonego i uchybu
dynamicznego
e(t)=e
u
+e
d
(t)
Ocena jakości układów
regulacji
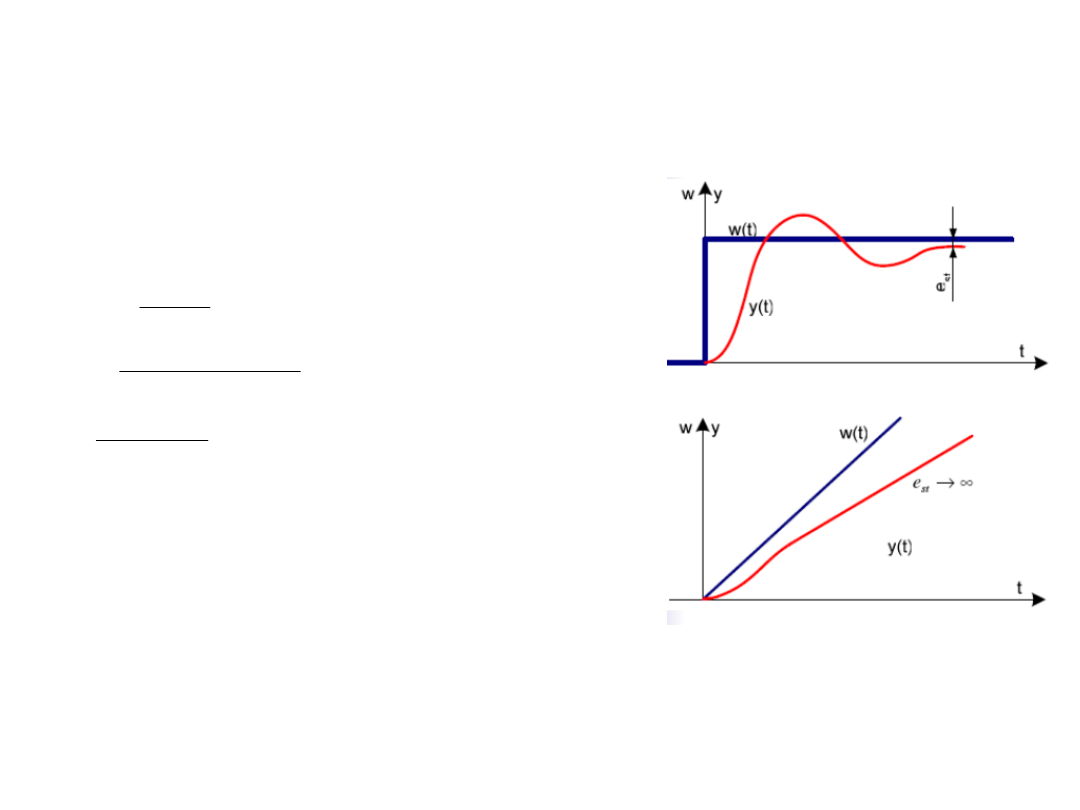
Dokładność statyczna
Miarą dokładności statycznej są
uchyby ustalone, utrzymujące się po
zaniku procesu przejściowego,
wywołane zmiana wartości zadanej
w(t) lub zakłócenia z(t)
)
(
lim
0
)
(
lim
)
(
)
(
)
(
1
)
(
)
(
)
(
)
(
1
1
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
lim
0
0
0
s
se
s
t
e
t
u
e
s
z
s
G
s
G
s
G
s
w
s
G
s
G
s
e
s
e
s
e
s
e
t
e
t
e
t
e
t
e
t
u
e
r
r
z
w
z
w
Ocena jakości układów
regulacji
1) Załóżmy, że brak jakiegokolwiek zakłócenia, obiekt jest inercyjny a
regulator jest proporcjonalny. Dla takiego układy błąd statyczny przy
zmianie wymuszenia w postaci skoku jednostkowego wynosi:
p
k
k
k
e
s
w
s
G
s
G
s
e
Ts
k
s
G
k
s
G
u
r
p
r
1
)
(
)
(
)
(
1
1
)
(
1
)
(
)
(
0
0
Wnioski:
•
Odchyłka statyczna jest wprost proporcjonalna do wymuszenia i
wzmocnienia obiektu oraz odwrotnie proporcjonalna
•
do wzmocnienia regulatora.
•
Odchyłka statyczna układu regulacji z regulatorem P nie jest zerowa!
REGULATOR P NIE LIKWIDUJE ODCHYŁKI STATYCZNEJ!
REGULATOR P JEST w STANIE ZLIKWIDOWAĆ ODCHYŁKĘ STATYCZNĄ!
Zwiększanie współczynnika wzmocnienia może prowadzić do niestabilności
układu!
Ocena jakości układów
regulacji
2) Załóżmy, że brak jakiegokolwiek zakłócenia, obiekt jest inercyjny a
regulator jest proporcjonalno-całkujący. Dla takiego układy błąd
statyczny przy zmianie wymuszenia w postaci skoku jednostkowego
wynosi:
0
)
1
(
)
1
(
lim
)
(
)
(
)
(
1
1
)
(
1
)
(
)
1
1
(
)
(
0
0
0
s
i
T
p
k
k
Ts
s
i
T
s
i
T
k
u
e
s
w
s
G
s
G
s
e
Ts
k
s
G
s
i
T
k
s
G
s
r
p
r
Wnioski:
Wzrost k
p
zmniejsza e
u
Odchyłka statyczna układu regulacji z
regulatorem PI może wynosić 0
Akcja różniczkująca nie ma wpływu na
wartość e
u

Ocena jakości układów
regulacji
Wnioski:
Układy, w których występują uchyby ustalone, proporcjonalne do
wymuszenia skokowego, nazywane są układami regulacji statycznej.
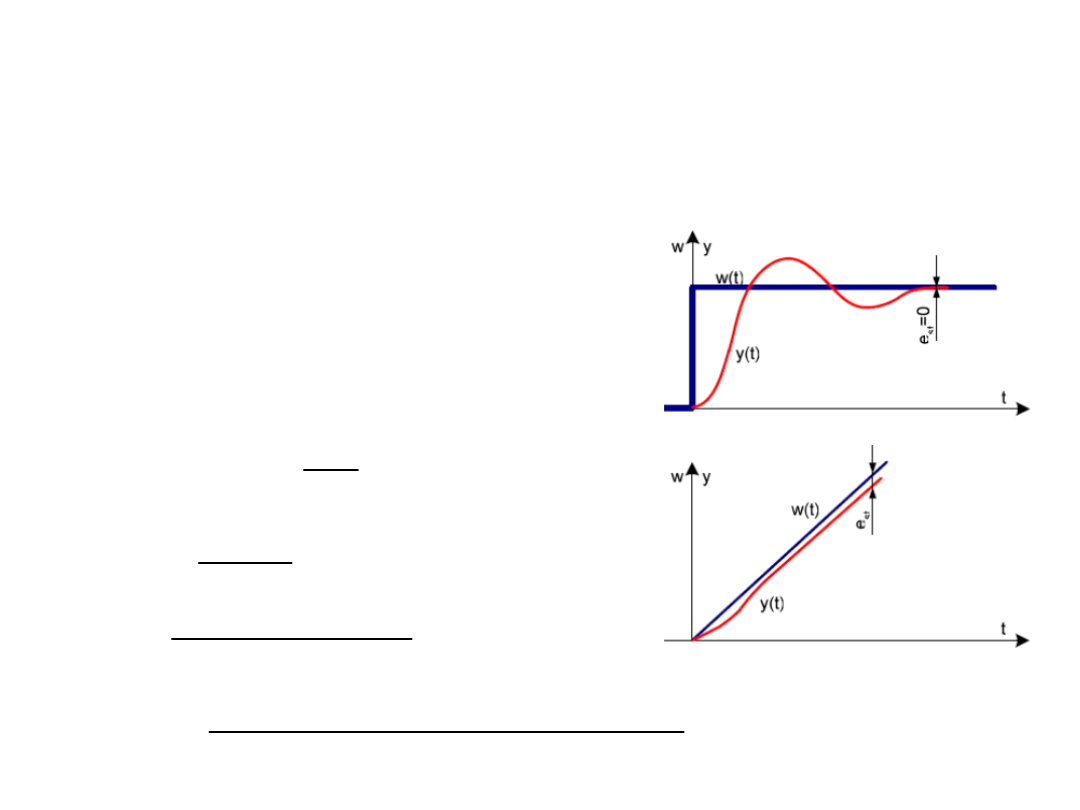
Układy, w których uchyby ustalone są równe zero nazywamy układami
regulacji astatycznej.
Układy astatyczne, wykazują pewne uchyby ustalone przy wymuszeniu
liniowo narastającym.
Astatyzm układu względem sygnału zadanego lub zakłócenia może
występować wtedy, gdy w tym układzie są elementy całkujące.
Likwidacją uchybu poprzez wprowadzenie dodatkowych elementów
całkujących ma zasadniczą wadę, gdyż może spowodować utratę
stabilności.
Dokładność statyczna

Ocena jakości układów
regulacji
Dokładność dynamiczna
Ocena dokładności dynamicznej nie jest jednoznaczna.
O ile bowiem uchyb ustalony łatwo zdefiniować i wyznaczyć jego
wartość, o tyle dokładność dynamiczną można scharakteryzować
różnymi parametrami, na podstawie różnych kryteriów
Kryteria te można podzielić na cztery grupy:
•ocena parametrów odpowiedzi skokowej,
• kryteria całkowe,
• kryteria częstotliwościowe,
• kryteria rozkładu pierwiastków.
Ocena jakości układów
regulacji
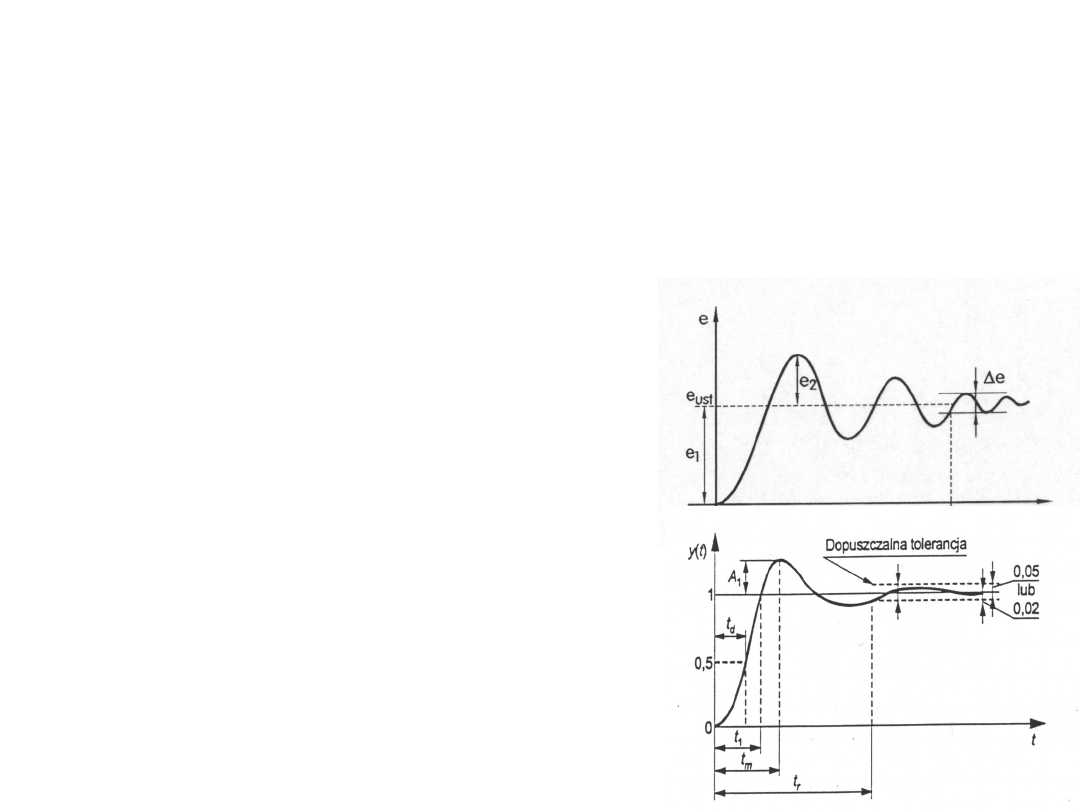
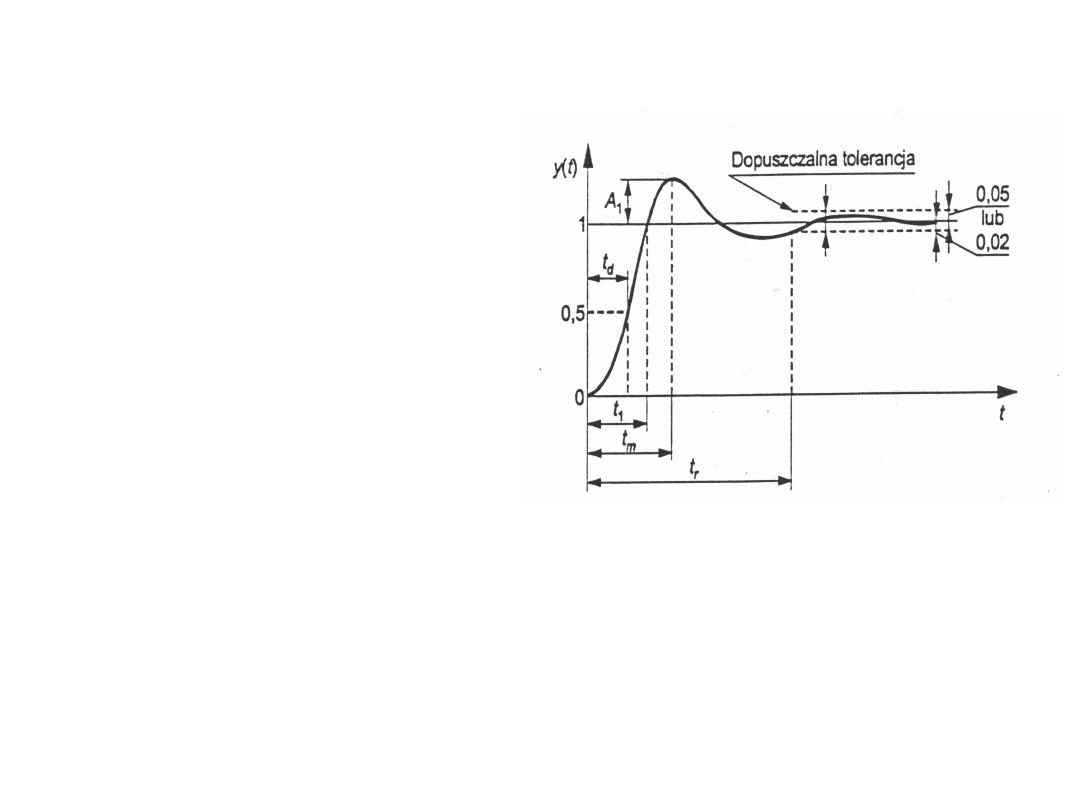
Ocena parametrów odpowiedzi skokowej
Odpowiedź skokowa rzeczywistego układu sterowania często daje
tłumione oscylacje, zanim osiągnie stan ustalony. Jakość regulacji
określa się w tym przypadku na podstawie następujących
parametrów:
czasu t
d
czasu narastania t
1
czasu szczytowego t
m
,
maksymalnego
przeregulowania A
1
czasu regulacji t
r
Ocena jakości układów
regulacji
Czas t
d
- jest czasem potrzebnym, aby
odpowiedź po raz pierwszy osiągnęła
połowę wartości ustalonej
Czas narastania t
1
-jest czasem
potrzebnym, aby odpowiedź wzrosła od
10% do 90%, od 5% do 95% lub od 0% do
100% swojej wartości końcowej
Czas szczytowy t
m
-jest czasem
potrzebnym, aby odpowiedź osiągnęła
pierwszy szczyt przeregulowania
Maksymalne przeregulowanie A
1
- jest
to największa wartość odchyłki e(t), czyli
różnicy między y(t) i w(t), występująca
podczas przebiegu przejściowego
Czasem regulacji t
R
nazywa się okres
liczony od chwili pojawienia się sygnału
zakłócającego na wejściu układu do chwili,
w której odchyłka e nie jest większa od jej
wartości ustalonej o więcej niż założona
dokładność Δe
Uwaga!!!
Niektóre parametry, np.
maksymalne przeregulowanie i
czas narastania, są przeciwstawne,
tzn. maksymalne przeregulowanie i
czas narastania nie mogą być
zmniejszane równocześnie. Jeżeli
jedno z nich jest zmniejszone, to
drugie z konieczności staje się
większe.
Ocena jakości układów
regulacji
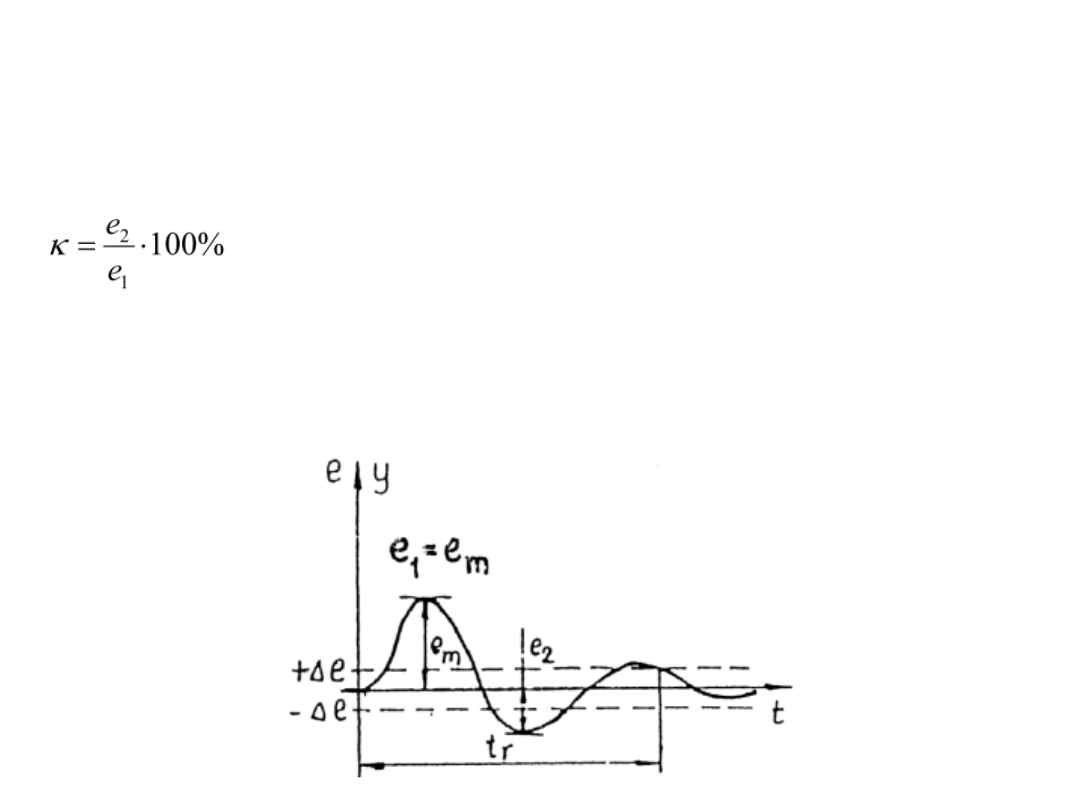
Przeregulowanie – charakteryzuje stopień gaśnięcia oscylacji
gdzie:
e
1
, e
2
: amplitudy pierwszego i drugiego odchylenia od końcowej wartości
ustalonej

Ocena jakości układów
regulacji

Ocena jakości układów
regulacji

Ocena jakości układów
regulacji
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
Wyszukiwarka
Podobne podstrony:
08 Ocena jakości liniowych układów regulacji
08 Ocena jakości liniowych układów regulacji
6 Dyskretne układy regulacji, rozdział 9 Jakość dyskretnych układów regulacji
wypalanie kamienia wapiennego oraz ocena jakości produktu – wapna palonego. (3), materiały naukowe
Metoda projektowania układów regulacji za pomocą linii pierwiastkowych
Korekcja liniowych układów regulacji
analiza egzamin 2010(1), technologia żywności, analiza i ocena jakości żywności
analiza 02, Studia SGGW, WNoŻ Inżynierskie 2008-2012, Sem IV, Ocena jakości
W 5, dietetyka II rok, analiza i ocena jakości żywności
cw 7?danie ukladow regulacji dwupolozeniowej
Analiza i ocena jakości żywności W D 1
Analiza 08, Studia SGGW, WNoŻ Inżynierskie 2008-2012, Sem IV, Ocena jakości
2. WODA W PRZYRODZIE - OCENA JAKOŚCI, Budownictwo, chemia, II semestr
AA Analiza i ocena jakości żywności, Technologia żywnosci i Żywienie człowieka, 4 SEMESTR, Analiza ż
MikroanalizaEDS, studia, semestr V, ocana jakosci technicznej materialow i wyrobow, ocena jakośći te
więcej podobnych podstron