
Wykład nr 2b
Metody komputerowe w
inżynierii materiałowej
Dr inż. Maciej Sułowski
A2, pok. 54H
Tel.:26-27
sulek@agh.edu.pl

Wykład nr 2b
Metody rozwiązywania układów
równań nieliniowych
• Metody rozwiązywania układów równań
linowych można podzielić na:
– kolejnych przybliżeń
– bisekcji (połowienia przedziału)
– metodę stycznych (Newtona)
– cięciw

Wykład nr 2b
Metody kolejnych przybliżeń
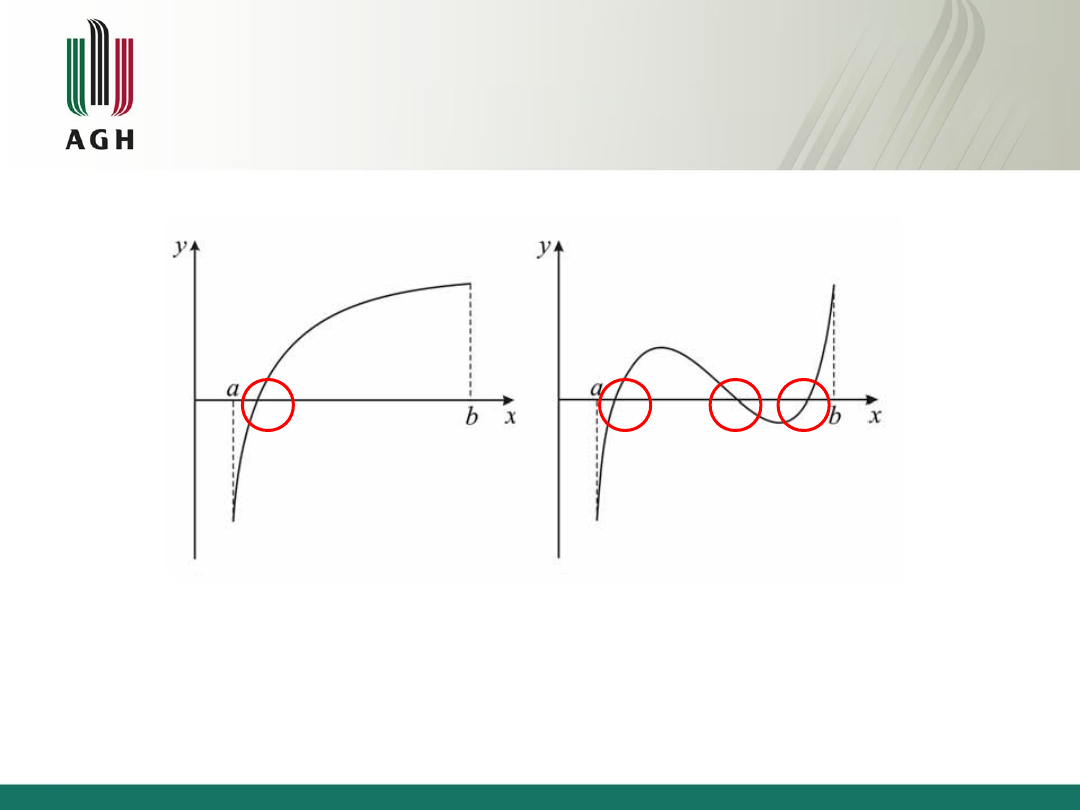
Twierdzenie 1 (Bolzano-Cauchy’ego)
• Jeżeli funkcja F(x) jest ciągła w przedziale
domkniętym [a,b] i F(a)⋅F(b) < 0, to między
punktami a i b znajduje się co najmniej jeden
pierwiastek równania F(x) = 0.
Twierdzenie 2
• Jeżeli w przedziale [a, b] spełnione są założenia
twierdzenia 1 i dodatkowo sgn F ′(x) = const dla
x
[a,b], to przedział ten jest przedziałem izolacji
pierwiastka równania F(x) = 0.
Wykład nr 2b
Metody kolejnych przybliżeń

Wykład nr 2b
• Przykład obliczeniowy
Metody kolejnych przybliżeń
Wykład nr 2b
• Niech [a,b] będzie przedziałem izolacji pierwiastka
równania F(x) = 0.
• Jako pierwsze dwa wyrazy ciągu przybliżeń
przyjmuje się: x
1
=a x
2
=b
• Kolejne przybliżenia wynikają ze wzoru:
• k dobierane, aby:
Metoda bisekcji
2
2
,
1
2
1
i
i
k
x
x
x
k
i
i
0
*
1
1
i
i
k
i
i
i
x
f
x
f
x
x
x
x
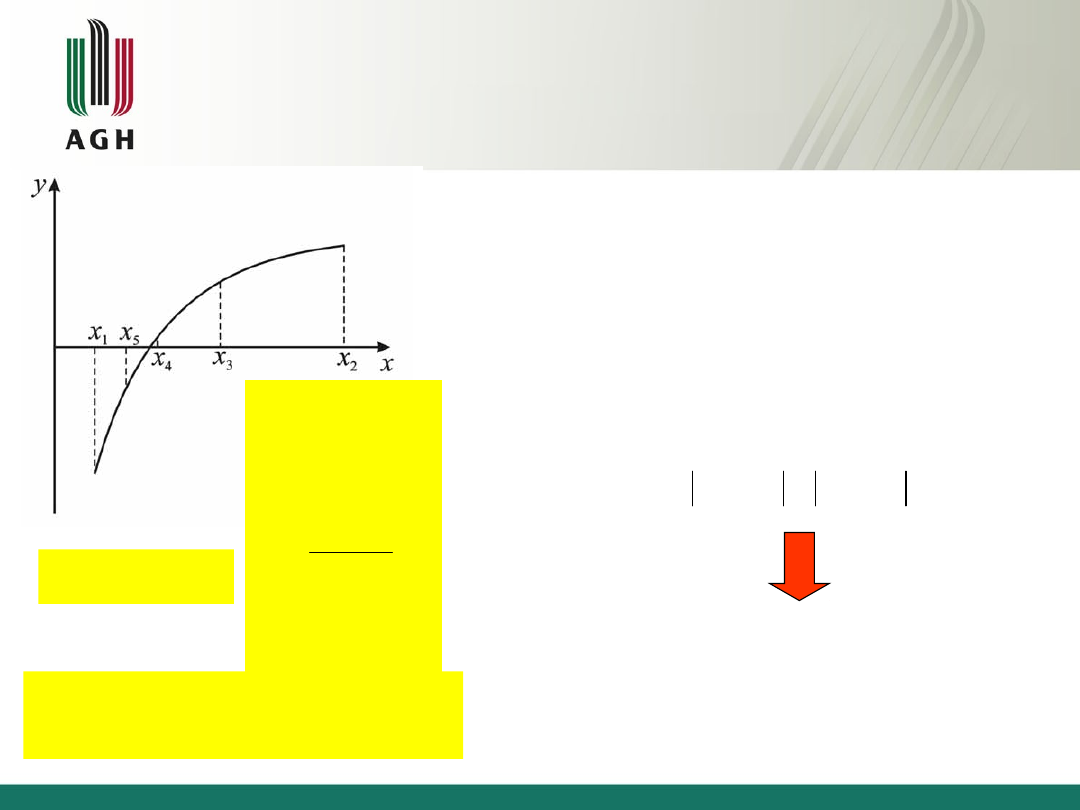
Wykład nr 2b
Metoda bisekcji
Ponieważ kolejne
przybliżenia znajdują
się każdorazowo w
przedziałach izolacji,
oraz
1
1
i
i
i
i
x
x
x
x
metoda jest zbieżna
Algorytm
)
(
)
(
2
...,
,
2
,
1
1
1
2
1
2
1
x
f
y
x
f
y
x
x
x
m
i
b
x
a
x
Jeżeli y*y
1
>0 to x
1
= x,
W przeciwnym wypadku x
2
= x

Wykład nr 2b
• Przykład obliczeniowy
Metoda bisekcji

Wykład nr 2b
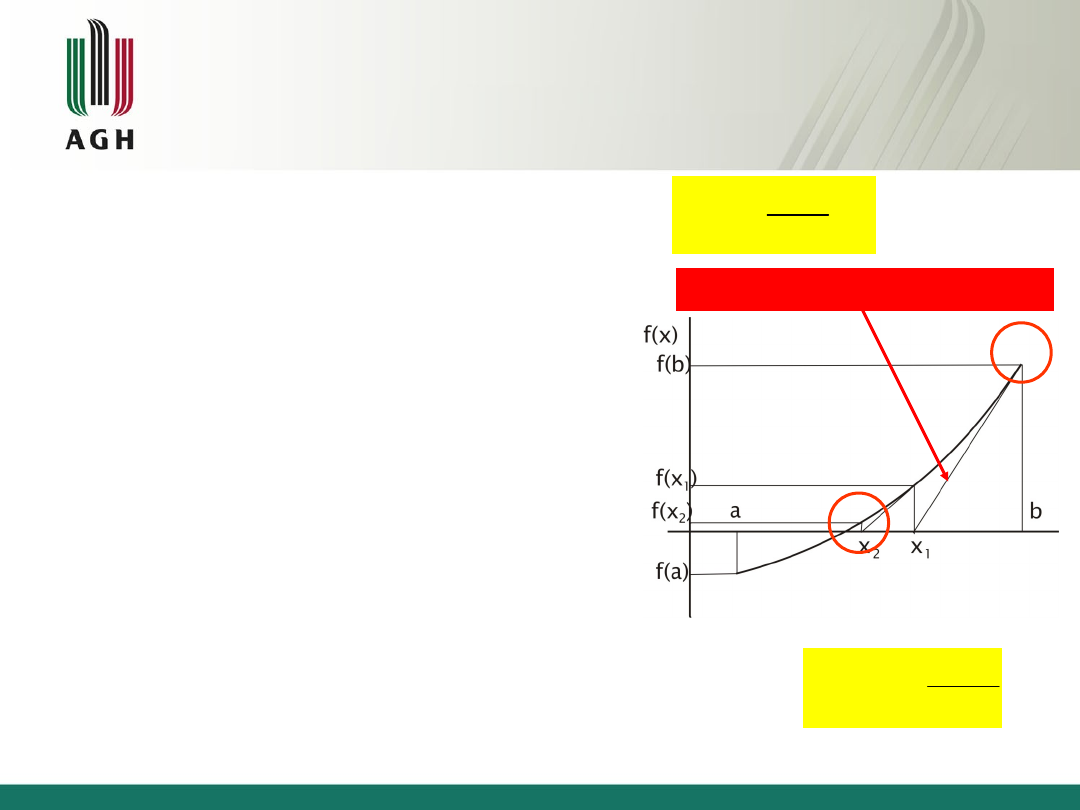
Metoda stycznych (Newtona)
•Jedna z najczęściej stosowanych metod
rozwiązywania równań nieliniowych
•Pozwala obliczyć przybliżoną wartość pierwiastka
równania nieliniowego (f(x)=0), przy założeniu, że
w przedziale [a,b], w którym leży pierwiastek,
funkcja f(x) ma na krańcach różne znaki oraz że
pierwsza i druga pochodna funkcji mają stały
znak
Wykład nr 2b
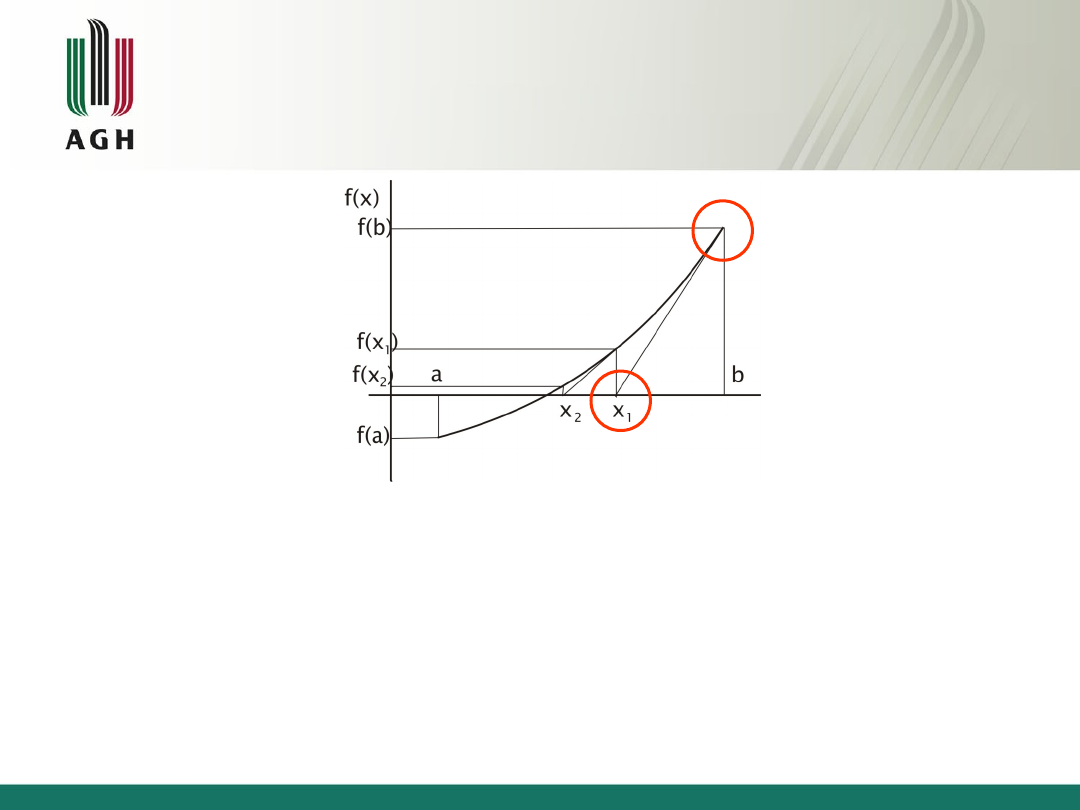
W metodzie Newtona z końca przedziału, w którym
funkcja f(x) ma ten sam znak co f’’(x) prowadzimy
styczną do wykresu funkcji y=f(x). Punkt przecięcia
osi odciętych, x
1
jest pierwszym przybliżeniem
szukanego pierwiastka równania.
Metoda stycznych (Newtona)
Wykład nr 2b
• Nietrudno zauważyć, że:
0
)
(
'
1
b
f
b
f
b
x
•
Gdy otrzymane przybliżenie
jest za mało dokładne
(f(x
1
)>) z punktu o
współrzędnych (x
1
, f(x
1
))
operację powtarzamy n razy,
dopóki wartość funkcji w
punkcie x
n
nie będzie
mniejsza od założonej
dokładności .
n
n
n
n
x
f
x
f
x
x
'
1
Metoda stycznych (Newtona)
• Wzór rekurencyjny opisujący kolejne
wyrazy ciągu przybliżeń ma postać
)
(
*
)
(
'
)
(
1
1
1
n
n
n
x
x
x
f
x
f
y
Wykład nr 2b
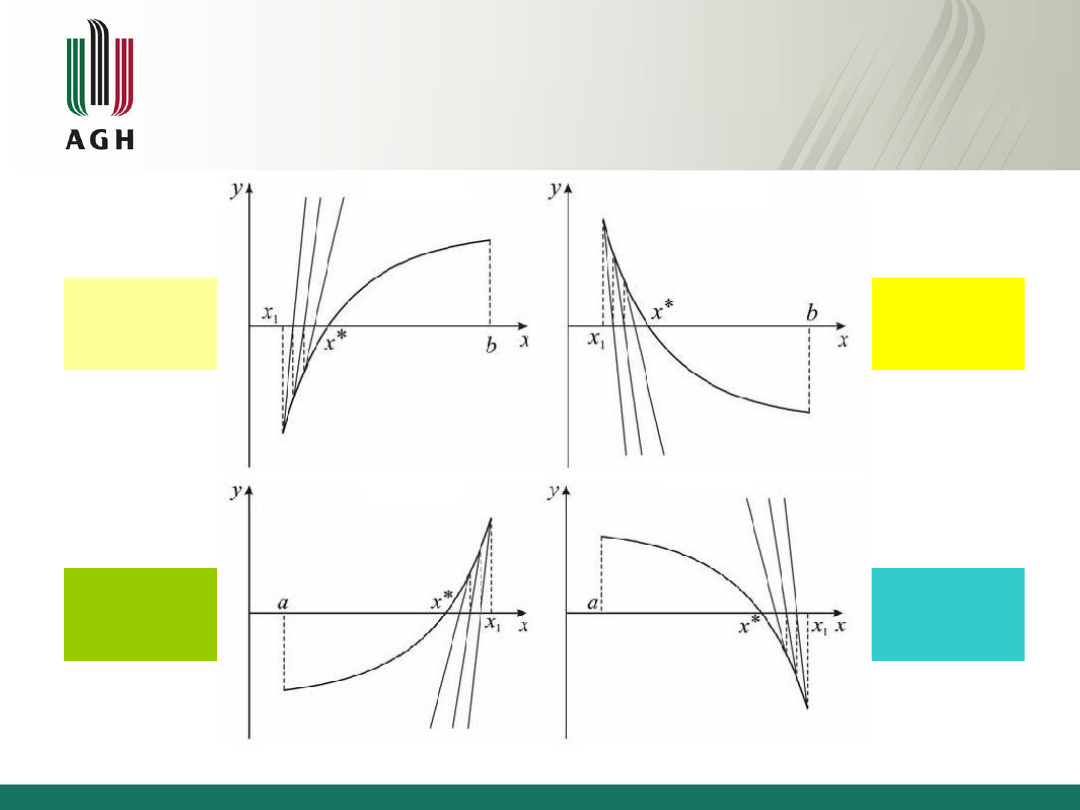
Metoda stycznych (Newtona)
f’(x)>0
f’’(x)<0
f’(x)<0
f’’(x)>0
f’(x)>0
f’’(x)>0
f’(x)<0
f’’(x)<0

Wykład nr 2b
• Ciąg przybliżeń jest ciągiem malejącym i zbieżnym.
• Operację obliczania rozwiązania równania f(x)=0
można stosować dla dowolnego punktu startowego
x
o
[a,b],
jeśli
styczne
do
krzywej
y=f(x)
poprowadzone z punktów granicznych przecinają oś
odciętych wewnątrz przedziału [a,b].
- założona dokładność rozwiązania
Metoda stycznych (Newtona)
Wykład nr 2b
Układ n równań nieliniowych
0
,...,
,
.
..........
..........
..........
0
,...,
,
0
,...,
,
2
1
2
1
2
2
1
1
n
n
n
n
x
x
x
f
x
x
x
f
x
x
x
f
*
*
1
*
*
1
n
n
n
n
x
f
x
J
x
x
Metoda stycznych (Newtona)
gdzie: x
n
* i x
n+1
* stanowią n i
n+1 przybliżenie zmiennej x*,
J(x
n
*) jest jakobianem funkcji
f(x*) a wyrazy macierzy
jakobianowej, J(x*) są
określone równaniem:
k
j
jk
x
x
f
x
J
*
*
Rozwiązanie ogólne

Wykład nr 2b
• Macierz Jacobiego – macierz zbudowana z
pochodnych cząstkowych (pierwszego rzędu)
funkcji, której składowymi są funkcje rzeczywiste
• Jakobian – wyznacznik macierzy Jakobiego
Metoda stycznych (Newtona)
2
2
2
1
:
)
,
(
f
f
f
1
)
,
(
)
,
(
2
3
2
1
xy
y
x
f
xy
x
y
x
f
Przykład: Niech dane
będzie przekształcenie
Jego jakobian wynosi
3
2
3
3
2
2
3
3
2
3
2
2
2
1
1
2
2
3
2
3
2
1
1
det
xy
x
xy
xy
x
x
y
xy
y
x
y
xy
x
xy
y
xy
x
x
xy
x
y
f
x
f
y
f
x
f
J
f
Wykład nr 2b
Rozwiązanie układu równań
i
n
n
a
x
x
1
Metoda stycznych (Newtona)
0
,...,
,
.
..........
..........
..........
0
,...,
,
0
,...,
,
2
1
2
1
2
2
1
1
n
n
n
n
x
x
x
f
x
x
x
f
x
x
x
f
polega na obliczaniu kolejnych
przybliżeń rozwiązania układu
zgodnie ze wzorem:
Wykład nr 2b
• wartość kolejnej poprawki a
i
dowolnej zmiennej jest
obliczana przez rozwiązanie układu dwu równań
liniowych, w których występują wartości funkcji f
1
, f
2
i
ich pochodnych w punkcie o współrzędnych x
n
, y
n
.:
Metoda stycznych (Newtona)
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
x
x
x
f
x
x
x
x
f
a
x
x
x
x
f
a
x
x
x
x
f
a
x
x
x
f
x
x
x
x
f
a
x
x
x
x
f
a
x
x
x
x
f
a
x
x
x
f
x
x
x
x
f
a
x
x
x
x
f
a
x
x
x
x
f
a
,...,
,
,...,
,
...
,...,
,
,...,
,
..
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
,...,
,
,...,
,
...
,...,
,
,...,
,
,...,
,
,...,
,
...
,...,
,
,...,
,
2
1
2
1
2
2
1
2
1
2
1
1
2
1
2
2
1
2
2
2
1
2
2
1
2
1
2
1
2
1
1
2
1
1
2
2
1
1
2
1
2
1
1
1

Wykład nr 2b
•W każdej iteracji musimy więc obliczyć n
2
elementów
f/x i rozwiązać układ liniowy rzędu n definiujący
wartości poprawek a.
•Obliczanie rozwiązania układu równań nieliniowych jest
prowadzone dopóki wartości poprawek a
i
nie osiągną
wartości mniejszych od założonej dokładności.
•Metoda Newtona jest lokalnie zbieżna, to znaczy ciąg
wyrazów jest dostatecznie bliski rozwiązaniu układu
równań.
•Jak widać, rozwiązanie układu równań nieliniowych
sprowadza się do rozwiązywania układów równań
liniowych.
Metoda stycznych (Newtona)

Wykład nr 2b
•W modelowaniu procesów występujących w inżynierii
materiałowej rozwiązywanie układów równań liniowych
i nieliniowych jest często stosowane
•Programowanie rozwiązań układów równań nieliniowych
jest trudne
•Do rozwiązywania układów równań liniowych można
wykorzystać MS Excel i wbudowane narzędzie Solver
•Narzędzie to można ponadto używać podczas:
– Rozwiązywania równania nieliniowego
– Rozwiązywania układu równań nieliniowych
Metoda stycznych (Newtona)

Wykład nr 2b
•Przykład obliczeniowy
Metoda stycznych (Newtona)
Wykład nr 2b
•Rozwiązanie równania F(x)=0 jest przybliżone ciągiem
miejsc zerowych poprowadzonych między punktami
stanowiącymi końce kolejnych przedziałów izolacji
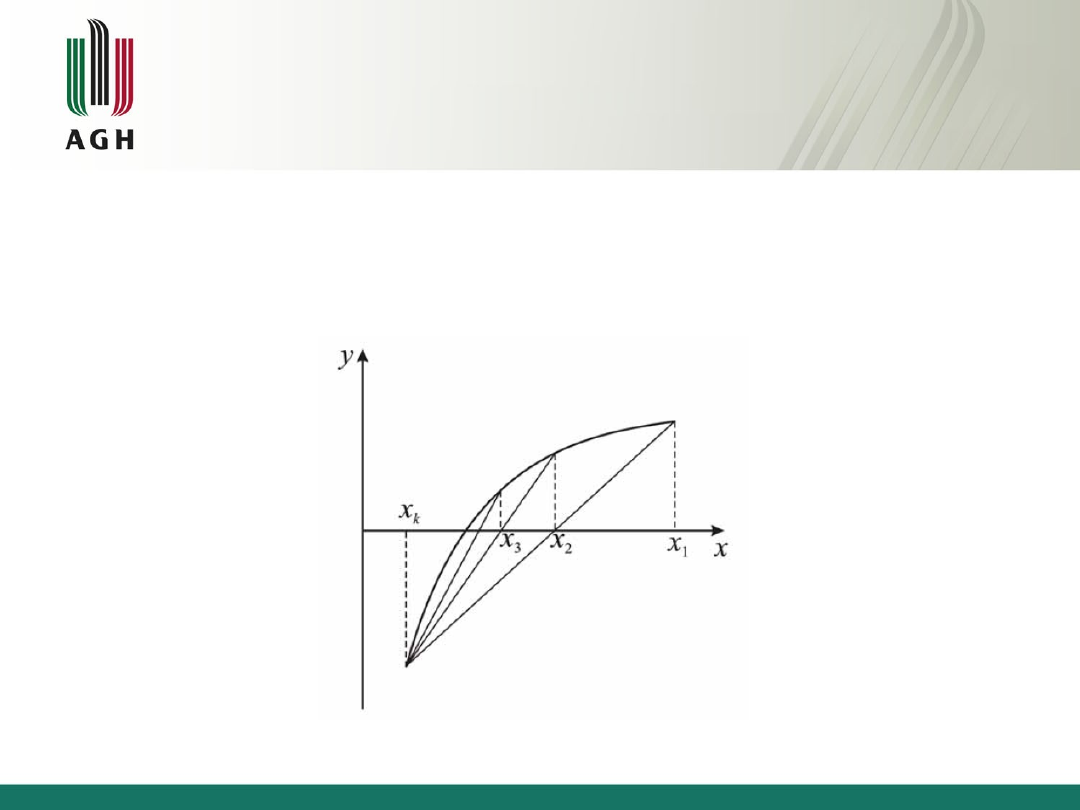
Metoda cięciw
Wykład nr 2b
Metoda cięciw
• Równanie cięciw można zapisać w postaci:
x
k
– drugi kraniec izolacji [x
i-1
, x
k
]
• Pierwszą cięciwę prowadzimy pomiędzy punktami
(a, F(a)) (b, F(b))
• Dla y=0 mamy:
1
1
1
1
)
(
)
(
)
(
i
k
i
i
k
i
x
x
x
x
x
F
x
F
x
F
y
)
(
)
(
)
(
1
1
1
i
i
k
i
i
i
x
F
x
F
x
x
x
F
x
x
Wykład nr 2b
Metoda cięciw
Założenie:
W przedziale [a, b] lub w kolejnym przedziale
izolacji znak drugiej pochodnej funkcji F(x) nie
zmienia się
wyrażenie
(*)
daje przybliżenie pierwiastka z nadmiarem lub
niedomiarem
)
(
)
(
)
(
1
1
1
i
i
k
i
i
i
x
F
x
F
x
x
x
F
x
x
Wykład nr 2b
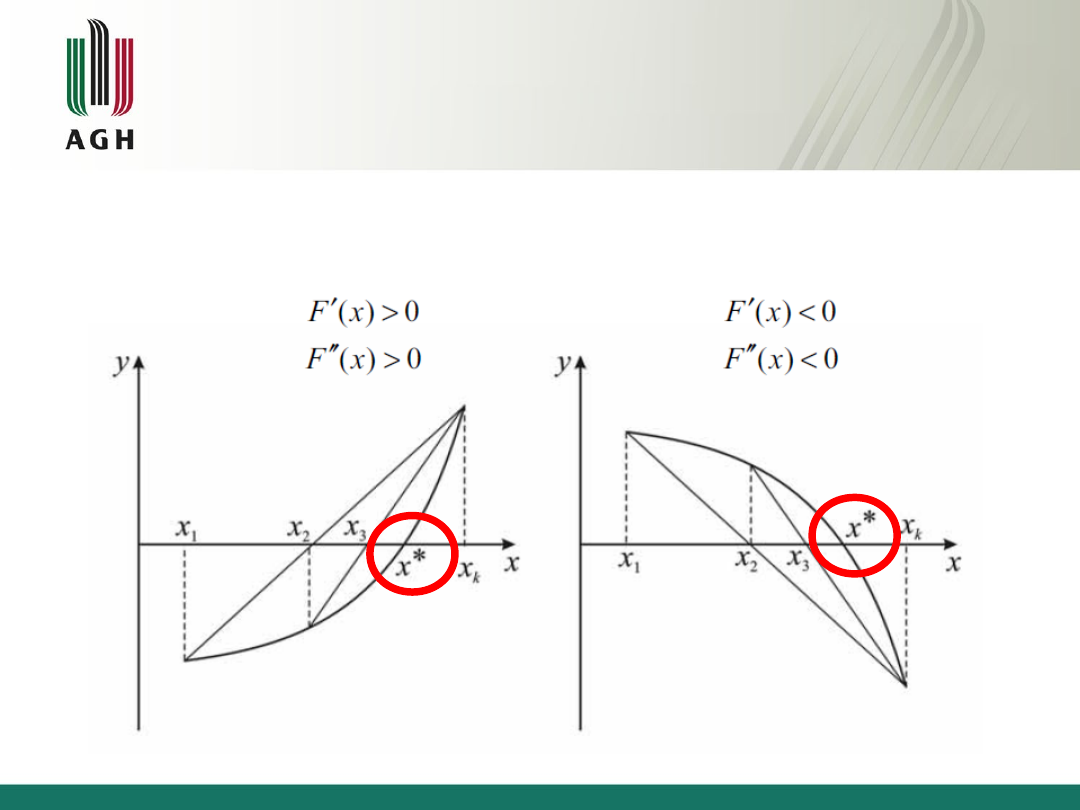
• Przybliżenie z niedomiarem:
F’(x) >0
F’’(x)>0 lub
F’(x)<0
F’’(x)<0
x
i
< x
i+1
< x
i
< x
i+2
<…< x
*
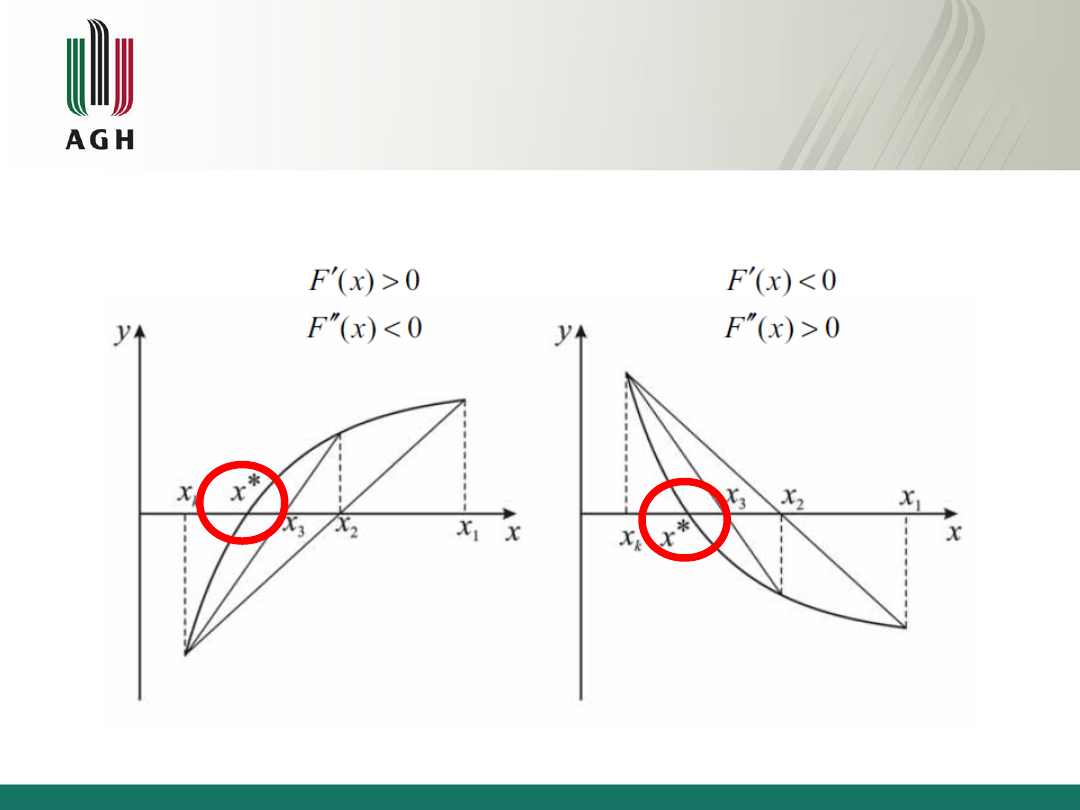
• Przybliżenie z nadmiarem:
F’(x) >0
F’’(x)<0 lub
F’(x)<0
F’’(x)>0
x
i
> x
i+1
> x
i
> x
i+2
>…> x
*
Metoda cięciw
Wykład nr 2b
• Oszacowanie pierwiastka równania z niedomiarem
Metoda cięciw
Wykład nr 2b
• Oszacowanie pierwiastka równania z nadmiarem
Metoda cięciw
Wykład nr 2b
Metoda cięciw
• Ciąg {x
i
} jest monotoniczny i ograniczony, posiada
więc granicę równą
co dowodzi zbieżności metody
• Zakładając, że x
k
– punkt stały pęku cięciw, to lewy
lub prawy kraniec przedziału [a, b], czyli x
k
=a lub
x
k
=b
*
0
)
(
)
(
)
(
)
(
lim
x
g
g
F
g
g
F
x
F
g
x
g
F
g
x
k
k
i
i
a
x
x
F
x
F
b
a
x
b
x
x
F
x
F
b
a
x
k
k
0
)
(
''
*
)
(
'
,
0
)
(
''
*
)
(
'
,

Wykład nr 2b
• Przykład obliczeniowy
Metoda cięciw
Wykład nr 2b
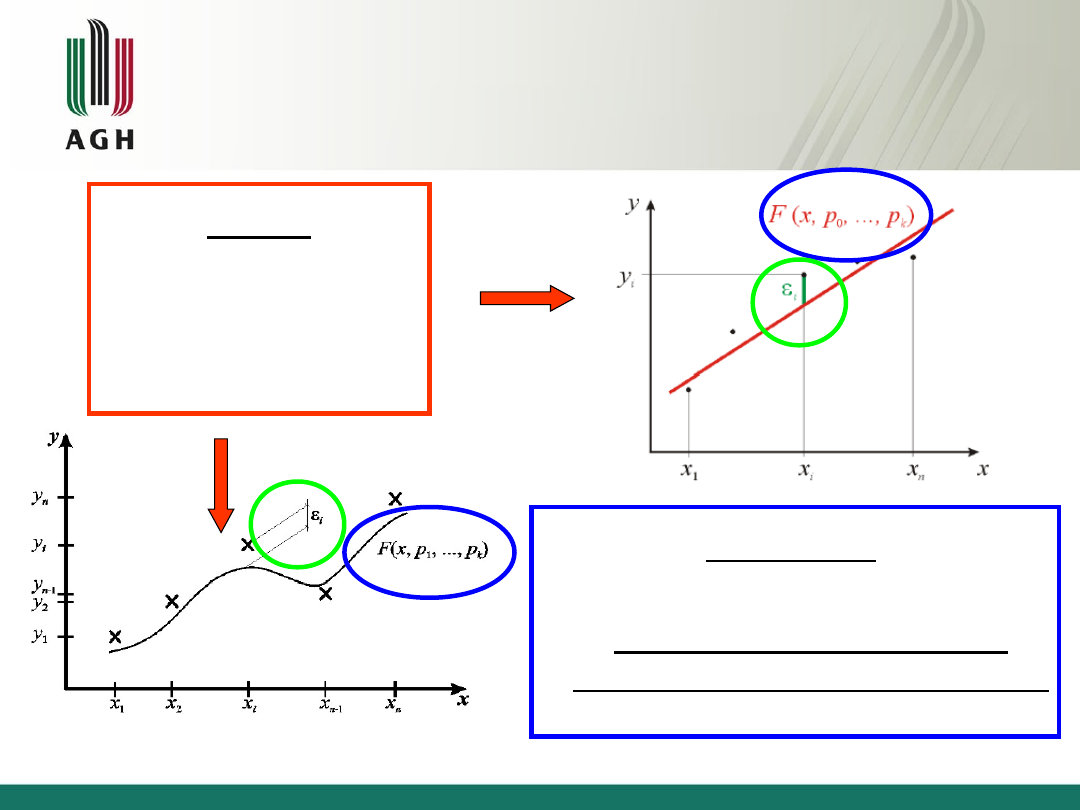
Aproksymacja
Szukane
F(x, p
1
, p
2
, …p
k
), x[a, b]
funkcja ta możliwie
najdokładniej odtwarza
przebieg funkcji F(x)
Dane
y=F(x), x[a, b]
Wykład nr 2b
• Funkcja F(x) może być zadana w postaci:
– zbioru punktów (aproksymacja punktowa):
F(x
1
)=y
1
, F(x
2
)=y
2
, …, F(x
n
)=y
n
– wzoru analitycznego (aproksymacja integralna) -
rzadziej
• Kryteria aproksymacji punktowej dla funkcji jednej
zmiennej tworzy się w ten sposób, aby
zminimalizować różnice między wartościami funkcji
F(x) a wartościami funkcji F(x, p
1
, p
2
, …p
k
) w
punktach (x
i
, y
i
), i=1, 2, …, n
• Odchyłka
Aproksymacja
i
k
i
y
p
p
x
F
)
,...,
,
(
1

Wykład nr 2b
• Postać funkcji aproksymacyjnej jest założona z góry,
optymalizacja
dotyczy
jedynie
nieznanych
parametrów p
1
, …, p
k
• Dobór parametrów p
1
, …, p
k
musi odbywać się w taki
sposób, aby spełnione było założone kryterium
dotyczące minimalizacji odchyłek
• Kryteria aproksymacji
– metoda najmniejszych kwadratów
– metoda wybranych punktów
– metoda średnich
– metoda sumowania bezwzględnych wartości
Aproksymacja - kryteria
Wykład nr 2b
• Współczynniki funkcji F muszą spełniać równanie
czyli:
• Zalety metody
– kryterium jest „mocne” – zawiera kwadraty odchyłek,
czyli liczby nieujemne
– prostota obliczeń minimum funkcji, pod warunkiem, że
rozpatruje się aproksymację w klasie wielomianów
uogólnionych
Aproksymacja – metoda
najmniejszych kwadratów
n
i
i
1
2
min
n
i
i
k
i
y
p
p
x
F
1
2
1
min
)
,...,
,
(
)
(
...
)
(
)
(
)
,...,
,
(
2
2
1
1
1
x
p
x
p
x
p
p
p
x
F
k
k
k
i

Wykład nr 2b
• Dany jest zbiór punktów
(x
1
, y
1
), (x
2
, y
2
), …, (x
n
, y
n
)
• Funkcja aproksymująca
• Kryterium najmniejszych kwadratów:
Aproksymacja liniowa funkcji
jednej zmiennej
x
p
p
y
2
1
min
)
,
(
2
1
2
1
2
1
n
i
i
i
y
x
p
p
p
p
S
Wykład nr 2b
• Warunek konieczny istnienia esktremum funkcji
dwóch zmiennych można zapisać jako:
a dalej jako:
Aproksymacja liniowa funkcji
jednej zmiennej
0
,
0
,
2
2
1
1
2
1
p
p
p
S
p
p
p
S
0
*
2
,
0
2
,
1
2
1
2
2
1
1
2
1
1
2
1
i
n
i
i
i
n
i
i
i
x
y
x
p
p
p
p
p
S
y
x
p
p
p
p
p
S
0
0
1
2
2
1
1
2
1
n
i
i
i
i
i
n
i
i
i
x
y
x
p
x
p
y
x
p
p
Wykład nr 2b
• Po przekształceniu uzyskujemy:
lub w postaci macierzowej:
Aproksymacja liniowa funkcji
jednej zmiennej
i
n
i
i
n
i
i
n
i
i
n
i
i
n
i
i
x
y
x
p
x
p
y
x
p
n
p
1
1
2
2
1
1
1
1
2
1
n
i
i
i
n
i
i
n
i
i
n
i
i
n
i
i
x
y
y
p
p
x
x
x
n
1
1
2
1
1
2
1
1
*
Y
P
X
*
Y
X
P
*
1
Wykład nr 2b
• Dany jest zbiór punktów
(x
1
, y
1
), (x
2
, y
2
), …, (x
n
, y
n
)
• Funkcja aproksymująca
• Kryterium najmniejszych kwadratów:
Aproksymacja liniowa funkcji
jednej zmiennej – inna funkcja
x
p
x
p
p
y
1
3
2
1
min
1
)
,
,
(
2
1
3
2
1
3
2
1
n
i
i
i
i
y
x
p
x
p
p
p
p
p
S
Wykład nr 2b
• Warunek konieczny istnienia esktremum funkcji
dwóch zmiennych można zapisać jako:
Aproksymacja liniowa funkcji
jednej zmiennej – inna funkcja
0
1
*
1
2
,
,
0
*
1
2
,
,
0
1
2
,
,
1
3
2
1
3
3
2
1
1
3
2
1
2
3
2
1
1
3
2
1
1
3
2
1
i
n
i
i
i
i
i
n
i
i
i
i
n
i
i
i
i
x
y
x
p
x
p
p
p
p
p
p
S
x
y
x
p
x
p
p
p
p
p
p
S
y
x
p
x
p
p
p
p
p
p
S
Wykład nr 2b
• Po przekształceniu i zapisaniu w postaci macierzy
uzyskujemy:
Aproksymacja liniowa funkcji
jednej zmiennej – inna funkcja
n
i
i
i
n
i
i
i
n
i
i
n
i
i
n
i
i
n
i
i
n
i
i
n
i
i
n
i
i
y
x
y
x
y
p
p
p
x
n
x
n
x
x
x
x
n
1
1
1
3
2
1
1
2
1
1
2
1
1
1
1
*
1
1
1
Y
P
X
*
Y
X
P
*
1
Wykład nr 2b
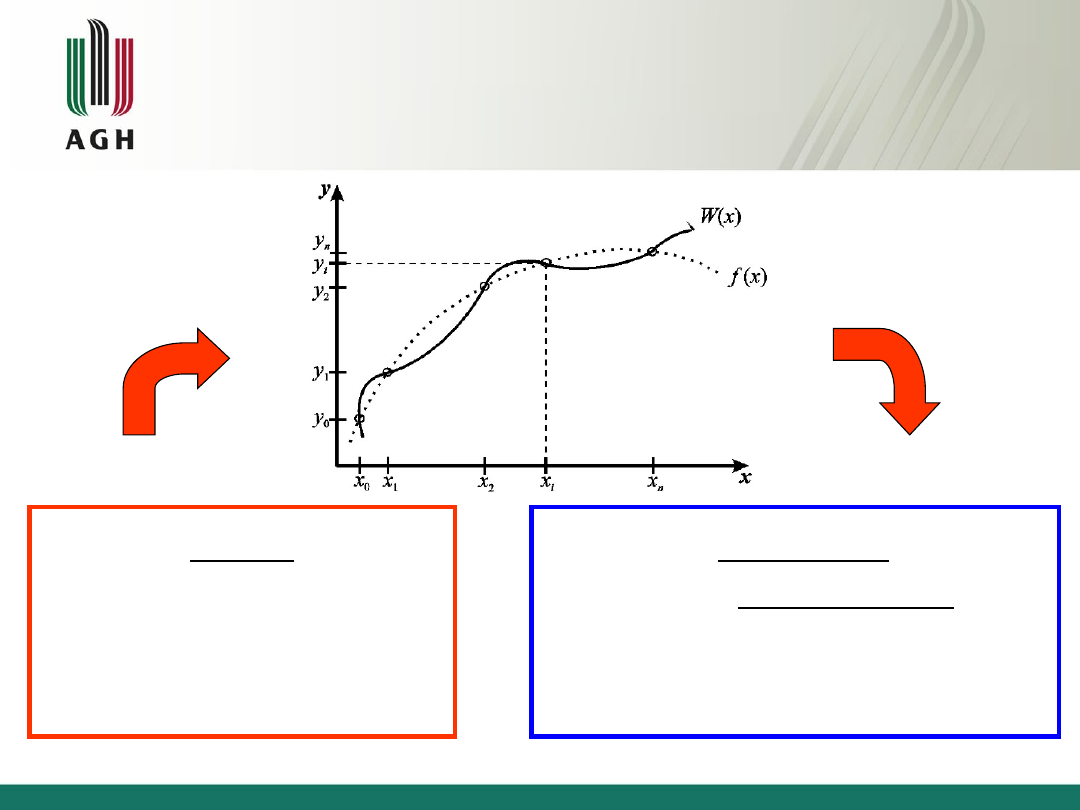
Interpolacja
Szukane
W(x) takie, aby:
W(x
0
)=y
0
, W(x
1
)=y
1
,…,
W(x
i
)=y
i
, …, W(x
n
)=y
n
Dane
y=F(x), x[x
0
,x
n
]
F(x
0
)=y
0
, F(x
1
)=y
1
,…,
F(x
i
)=y
i
, …, F(x
n
)=y
n
Wykład nr 2b
• Wyznaczenie funkcji W(x) opiera się na doborze
kombinacji liniowej n+1 funkcji bazowych postaci:
• Wprowadzając macierz bazową oraz macierz
współczynników A
T
, wielomian W(x) można zapisać:
Interpolacja
n
i
i
i
n
i
x
a
x
W
x
x
x
x
x
0
2
1
0
,...,
,...,
,
,
A
x
x
W
a
a
a
a
A
x
x
x
x
x
n
T
n
i
*
,...,
,
,
,...,
,...,
,
,
2
1
0
2
1
0
Wykład nr 2b
• Warunek, jaki musi spełniać wielomian interpolacyjny
można zapisać w postaci macierzowej:
• gdzie:
A – macierz kolumnowa współczynników o (n+1)
wierszach
Y - macierz kolumnowa wartości funkcji o (n+1) wierszach
X – macierz o wymiarach (n+1)
(n
+1)
Interpolacja
Y
A
X
n
i
y
x
W
i
i
*
,...,
2
,
1
,
0

Wykład nr 2b
• Postacie macierzy X i Y
• Jeżeli:
• oraz
• to:
gdzie: (x) – macierz bazowa, X
-1
– macierz interpolacyjna,
Y – wektor wartości funkcji w węzłach
Interpolacja
n
n
n
n
n
n
n
y
y
y
Y
x
x
x
x
x
x
x
x
x
X
...
...
...
...
...
...
...
...
1
0
1
0
1
1
1
1
0
0
0
1
0
0
Y
X
A
X
*
0
det
1
A
x
x
W
*
Y
X
x
x
W
*
*
1

Wykład nr 2b
• Bazę stanowią funkcje
• Przy spełnionym warunku (układ równań), wielomian
interpolacyjny ma postać
Interpolacja wielomianowa
n
n
x
x
x
x
x
x
x
...,
,
,
,
1
2
2
1
0
n
n
x
a
x
a
x
a
a
x
W
...
2
2
1
0
n
n
n
n
n
n
n
n
n
n
y
x
a
x
a
x
a
a
y
x
a
x
a
x
a
a
y
x
a
x
a
x
a
a
...
.....
...
...
2
2
1
0
1
1
2
1
2
1
1
0
0
0
2
0
2
0
1
0
Wykład nr 2b
• Jeśli
to układ posiada jedno rozwiązanie względem a
i
• Wyznacznik macierzy X ma postać
Interpolacja wielomianowa
n
x
x
x
x
...
2
1
0
j
i
j
i
n
n
n
n
n
x
x
x
x
x
x
x
x
X
0
...
1
...
...
...
...
...
1
...
1
det
1
1
0
0
Wykład nr 2b
• Wady interpolacji liniowej:
– interpolacja wielomianowa nie jest zbyt efektywna,
ponieważ macierz X jest macierzą pełną – błędy przy
odwracaniu
– macierz X nie jest zawsze dobrze uwarunkowana – może
być osobliwa (tzn. det X = 0)
Interpolacja wielomianowa

Wykład nr 2b
• Przykład obliczeniowy
Interpolacja wielomianowa

Wykład nr 2b
• Bazą w tej metodzie są funkcje:
Dla każdej funkcji
brakuje składnika
Interpolacja Lagrange’a
1
3
2
1
1
1
2
1
3
2
0
1
3
2
1
0
...
.
..........
..........
..........
..........
..........
...
...
..........
..........
..........
..........
..........
...
...
n
n
n
i
i
i
n
n
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
n
i
x
i
...,
,
1
,
0
,
i
x
x

Wykład nr 2b
• Wielomian interpolacyjny przyjmuje postać:
• a macierz X
Interpolacja Lagrange’a
1
1
0
2
0
1
2
1
0
1
1
0
0
...
...
...
...
...
n
n
n
n
n
n
x
x
x
x
x
x
a
x
x
x
x
x
x
a
x
x
x
x
x
x
a
x
a
x
a
x
a
x
W
n
n
x
x
x
x
X
...
0
0
0
0
...
...
...
...
0
...
0
0
...
0
0
0
...
0
0
2
2
1
1
0
0
w punkcie x=x
i
wszystkie funkcje
oprócz
i
(x)
zerują się, bo
występuje w nich
składnik (x-x
i
)
Wykład nr 2b
• Współczynniki wielomianu Lagrange’a wyznacza się ze
wzoru:
• Ponieważ macierz X ma tylko główną przekątną
niezerową, to:
Interpolacja Lagrange’a
n
n
n
n
n
n
n
n
n
n
n
x
y
x
x
x
x
x
x
y
a
x
y
x
x
x
x
x
x
y
a
x
y
x
x
x
x
x
x
y
a
1
2
1
1
1
1
1
2
1
0
1
1
1
0
0
0
0
2
0
1
0
0
0
...
....
...
...
Y
A
X
*
Wykład nr 2b
• Wielomian interpolacyjny możemy zapisać:
Interpolacja Lagrange’a
n
j
x
x
x
x
y
x
W
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
y
x
W
i
j
j
i
i
j
j
n
i
i
n
i
i
i
i
i
i
i
n
i
i
n
i
i
...,
,
1
,
0
,
...
...
...
...
0
1
1
1
0
1
1
1
0
0

Wykład nr 2b
• Przykład obliczeniowy
Interpolacja Lagrange’a

Wykład nr 2b
Różnice skończone
• Dla funkcji stabelaryzowanej przy stałym kroku
• wprowadza się pojęcie różnicy skończonej rzędu k
1
1
x
x
h
i
1
0
1
1
1
1
1
1
2
1
1
2
1
1
1
....
2
k
i
k
j
j
k
i
i
k
i
k
i
k
i
i
i
i
i
i
i
y
j
k
y
y
y
y
y
y
y
y
y
y
y
y
y
y
Wykład nr 2b
Różnice skończone
• Na podstawie zbioru wartości funkcji
• buduje się tablicę różnic skończonych
const
h
x
x
x
f
y
i
i
i
i
1
Nr
x
y
y
2
y
3
y
0
X
0
y
0
y
0
2
y
0
3
y
0
1
X
1
y
1
y
1
2
y
1
…
2
X
2
y
2
y
2
…
…
3
X
3
Y
3
…
…
…
...
…
…
…
…
3
y
n-3
...
…
…
…
2
y
n-2
…
…
…
y
n-1
n
x
n
y
n

Wykład nr 2b
Różnice skończone
• Przykład obliczeniowy
Wykład nr 2b
Różnice skończone
• Własności różnic skończonych
• Z ostatniej własności wynika twierdzenie:
Jeżeli F(x) jest wielomianem stopnia n, to różnica
skończona rzędu n tej funkcji jest stała, a
kolejne zerami.
1
1
1
0
1
0
1
...
...
...
0
n
n
n
n
n
n
n
n
n
k
k
k
x
b
x
b
b
y
x
a
x
a
a
y
h
nhx
x
h
x
y
x
y
x
f
C
y
x
f
y
x
f
C
y
x
Cf
y
y
C
y
Wykład nr 2b
Wzory interpolacyjne dla
argumentów równoodległych
Dla zbioru węzłów:
dane są wartości funkcji
Wielomian interpolacyjny ma postać
nh
x
x
h
x
x
h
x
x
x
n
0
0
2
0
1
0
2
)
(
)
(
)
(
)
(
2
1
0
n
x
f
x
f
x
f
x
f
n
q
x
x
q
x
x
q
x
x
q
x
x
h
x
x
q
n
q
q
q
q
a
q
q
q
a
q
q
a
q
a
a
x
W
n
n
...
2
1
0
1
...
2
1
...
2
1
1
2
1
0
0
3
2
1
0

Wykład nr 2b
Wzory interpolacyjne dla
argumentów równoodległych
Funkcje bazowe:
1
...
3
2
1
...
2
1
1
1
3
2
1
0
n
q
q
q
q
q
x
q
q
q
x
q
q
x
q
x
x
n

Wykład nr 2b
Wzory interpolacyjne dla
argumentów równoodległych
Układ równań, z którego wyznacza się współczynniki:
n
n
y
y
y
y
y
a
a
a
a
a
n
n
n
n
n
n
n
...
...
*
!
...
2
1
1
1
...
...
...
...
...
...
0
...
6
6
3
1
0
...
0
2
2
1
0
...
0
0
1
1
0
...
0
0
0
1
3
2
1
0
3
2
1
0
Wykład nr 2b
Wzory interpolacyjne dla
argumentów równoodległych
n
n
y
a
n
a
n
n
na
a
y
a
a
a
a
y
a
a
a
y
a
a
y
a
!
...
1
......
6
6
3
2
2
2
1
0
3
3
2
1
0
2
2
1
0
1
1
0
0
0
!
......
!
3
!
2
0
0
3
3
0
2
2
0
1
0
0
n
y
a
y
a
y
a
y
a
y
a
n
n
Wykład nr 2b
Wzory interpolacyjne dla
argumentów równoodległych
I wzór interpolacyjny Newtona
II wzór interpolacyjny Newtona
o
n
o
y
n
n
q
q
q
y
q
q
y
q
y
x
W
!
1
...
1
...
!
2
1
2
0
0
o
n
n
n
n
y
n
n
q
q
q
y
q
q
y
q
y
x
W
!
1
...
1
...
!
2
1
2
2
1

Wykład nr 2b
Wzory interpolacyjne dla
argumentów równoodległych
Przykłady obliczeniowe - wykorzystanie I oraz II
wzoru interpolacyjnego Newtona
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
- Slide 44
- Slide 45
- Slide 46
- Slide 47
- Slide 48
- Slide 49
- Slide 50
- Slide 51
- Slide 52
- Slide 53
- Slide 54
- Slide 55
- Slide 56
- Slide 57
- Slide 58
- Slide 59
- Slide 60
- Slide 61
Wyszukiwarka
Podobne podstrony:
Metody komputerowe w inzynierii materiałowej 8
ćwiczenie nr 2, Ćwiczenie nr 2 - Metody komputerowe w Inżynierii Materiałowej
Metody komputerowe w inzynierii materiałowej 2
Metody komputerowe w inzynierii materiałowej 5
Metody komputerowe w inzynierii materiałowej 10
Metody komputerowe w inzynierii materiałowej 9
2008 Metody komputerowe dla inzynierow 20 D 2008 1 8 22 18 59id 26588 ppt
2008 Metody komputerowe dla inzynierow 18 D 2008 1 8 22 16 21id 26586 ppt
METODY KOMPUTEROWE W MECHANICE 2
inzynieryjna, Geodezja, Geodezja Inżynieryjna, materialy
Zagadnienia do kolokwium zaliczeniowego 2013-2014, Inżynieria materiałowa pwr, Inżynieria chemiczna
więcej podobnych podstron