1
Nazwa modułu kształcenia
(przedmiotu)
Systemy pomiarowe w
mechatronice
Kod modułu kształcenia
E47/EM/6
Rodzaj modułu kształcenia
(obowiązkowy lub wybieralny)
obowiązkowy
Rodzaj studiów
stacjonarne, I-go stopnia
Obszar kształcenia
Nauki techniczne
Kierunek studiów
Elektrotechnika
Specjalność
Elektromechatronika
Profil kształcenia
praktyczny
Rok studiów
trzeci
Semestr
szósty
Rodzaj zajęć i liczba godzin
dydaktycznych
30 w., 30 lab.
Liczba punktów ECTS
5
Tytuł/stopień naukowy, imię,
nazwisko, adres e-mail wykładowcy
(wykładowców)
Dr hab. inż. Andrzej Odon, prof.
nadzw.
andrzej.odon@put.poznan.pl
mgr inż. Grzegorz Pilzak
mgr inz. Waldemar Hawrot
2
II. Cel (cele) modułu kształcenia
Zapoznanie się z zagadnieniami statycznych i dynamicznych
właściwości sensorów i przetworników pomiarowych oraz miarami
ich niedokładności, metodami przetwarzania i rejestracji sygnałów
zmiennych w czasie oraz zastosowania zaawansowanych
systemów pomiarowych.
Opanowanie
umiejętności
właściwego
doboru
narzędzi
pomiarowych dla realizacji zadań inżynierskich w zakresie
statycznych i dynamicznych pomiarów wielkości elektrycznych i
nieelektrycznych.
III. Wymagania wstępne w zakresie wiedzy, umiejętności
oraz kompetencji społecznych
Podstawowa wiedza w zakresie matematyki, fizyki, podstaw
elektrotechniki
i
metrologii.
Umiejętność
efektywnego
samokształcenia w dziedzinie związanej z wybranym kierunkiem
studiów.
3
•Treści kształcenia
Symbol treści kształcenia
Opis treści kształcenia
TK_01
Podstawowe pojęcia dotyczące błędów i niepewności pomiarów. Wybrane zagadnienia
przetwarzania niezniekształcającego - właściwości statyczne i dynamiczne sensorów i
przetworników pomiarowych. Dopasowanie przetworników w torze pomiarowym.
TK_02
Analogowe elementy sprzętowe systemów pomiarowych – sensory, analogowe
przetworniki pomiarowe, układy kondycjonowania sygnałów toru pomiarowego,
TK_03
Cyfrowe przetwarzanie sygnałów ciągłych – próbkowanie, zjawisko aliasingu,
kwantowanie, kodowanie, błędy kwantowania, dokładność pomiaru. Elementy
sprzętowe techniki przetwarzania cyfrowego - komparatory, układy próbkująco-
pamiętające, przetworniki impulsowo-czasowe, przetworniki analogowo-cyfrowe i
cyfrowo-analogowe.
TK_04
Zastosowanie zaawansowanych technik pomiarowych do wizualizacji, rejestracji i
pomiarów sygnałów oraz akwizycji i przetwarzania danych – rejestratory cyfrowe i
oscyloskopy cyfrowe, karty pomiarowe, przegląd interfejsów, oprogramowanie
elementów systemów pomiarowych (LabView, DasyLab)
TK_05
Dot. treści ćw. lab.: badanie właściwości dynamicznych i statycznych sensorów do
pomiaru temperatury, przemieszczeń i parametrów promieniowania i wybranych
elementów układu kondycjonowania sygnału (wzmacniacze pomiarowe, przetworniki
wartości średniej i szczytowej, filtry aktywne)
4
Zalecana literatura
1. M. Gruca, J. Grzelka, M. Pyrc, S. Szwaja, W. Tutak, Miernictwo i
systemy pomiarowe, Częstochowa 2008
2. W. Nawrocki, Komputerowe systemy pomiarowe, WKŁ 2002
3. A. Chwaleba, M Poniński, A. Siedlecki ‑ Metrologia elektryczna,
WNT, Warszawa, 2010.
4. A. Cysewska-Sobusiak ‑ Podstawy Metrologii i inżynierii
pomiarowej, Wyd. Politechniki Poznańskiej, 2010.
5. 6. J. Rydzewski, Pomiary oscyloskopowe, WNT, Warszawa, 2007.
6. S. Tumański – Technika pomiarowa, WNT 2007.
7. A. Zatorski, R. Sroka – Podstawy metrologii elektrycznej, Wyd.
AGH, Kraków, 2011.
8.J. Grzelka, E. Mazur, M. Gruca, W. Tutak ‑ Miernictwo i systemy
pomiarowe - laboratorium, WPC, Częstochowa, 2004
9. J. Zakrzewski , Czujniki i przetworniki pomiarowe. WPŚl. Gliwice
2004.
5
1. Struktura komputerowego
systemu pomiarowego
6
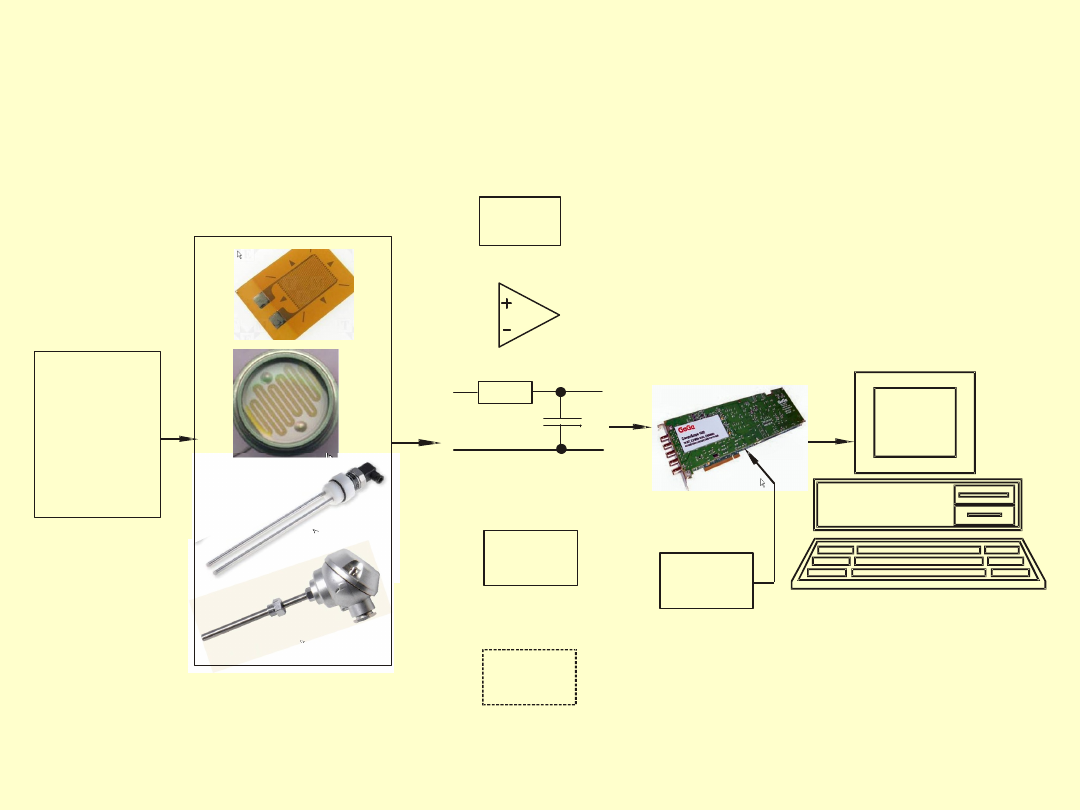
Struktura
komputerowego
systemu pomiarowego
O b je k t
Z ja w is k o
C z u jn ik i
U k ła d
k o n d y c jo n o w a n ia
K a r ta
p o m ia r o w a
z u k ła d e m
p r z e tw o r n ik a
a n a lo g . - c y fr.
w z m a c n ia c z
F i ltr
z a s ila c z
I n n e r o d z a j e
p r z e tw o r n ik ó w
.
P r z e tw o r n ik
n a p ię c i e - p r ą d .
U / I
A / C
7
Tor pomiarowy
– to droga przebiegu sygnału od jego źródła, które
stanowi badane zjawisko fizyczne, poprzez człony przetwarzające,
porównujące i elementy transmisyjne – do urządzeń wyjściowych,
przy pomocy których uzyskuje się zobrazowanie wyników pomiarów
[
Robert Czabanowski
SENSORY I SYSTEMY POMIAROWE, Oficyna Wyd. Poltechmiki Wrocławskiej 2010]
System pomiarowy
– zestaw spełniających określone funkcje i
współpracujących ze sobą przyrządów pomiarowych i urządzeń
dodatkowych - przeznaczonych do zbierania, porównywania,
rejestracji i przetwarzania sygnałów o mierzonych wielkościach
fizycznych – umożliwiających określenie stanu obiektu badanego
[Robert
Czabanowski SENSORY I SYSTEMY POMIAROWE, Oficyna Wyd. Poltechmiki Wrocławskiej 2010].
Analogowy system pomiarowy
– przetwarzanie sygnału nie zmienia
jego ciągłego charakteru, a wynik pomiaru przedstawia się w postaci
odczytywanych lub rejestrowanych – najczęściej w funkcji czasu –
sygnałów analogowych
[Robert Czabanowski SENSORY I SYSTEMY POMIAROWE, Oficyna Wyd.
Poltechmiki Wrocławskiej 2010].
.
Cyfrowy system pomiarowy
– na pewnym etapie przetwarzania
sygnału
pomiarowego występuje dyskretyzacja sygnału analogowego
(przetwarzanie
analogowo-cyfrowe) a wynik przedstawia się w postaci cyfrowej [
Robert
Czabanowski SENSORY I SYSTEMY POMIAROWE, Oficyna Wyd. Poltechmiki Wrocławskiej 2010].
.
8
Czujnik
(inna nazwa sensor) – element systemu pomiarowego, który
dokonuje
przetworzenia wielkości nieelektrycznej na elektryczną.
Układ kondycjonowania (kondycjoner)
ma za zadanie dopasowanie
czujnika do
typowego układu wejścia komputera. Zazwyczaj wyjściowy sygnał
kondycjonera jest sygnałem analogowym. [
S. Tumański, Technika pomiarowa
].
Przykładowe zadania układów kondycjonowania:
- zasilanie sensora prądem stałym lub zmiennym
- zabezpieczanie wejść układu
- przesuwanie poziomu sygnału
- wzmacnianie
- przetwarzanie na sygnał prądowy dla celów transmisji (standard 5-
20 mA)
- linearyzacja
- przełączanie sygnałów analogowych z czujników pomiarowych
- izolacja galwaniczna
- filtracja

9
Nazewnictwo – problemy z jednolitością i jednoznacznością stosowanych
pojęć
- Niektórzy autorzy zamiast stosować nazewnictwo np..
czujnik
termoelektryczny
określają mianem -
przetwornik termoelektryczny
. Jest to w pewnym stopniu
uzasadnione, bo każdy czujnik realizuje operację przetwarzania. Spotyka się
również
inne określenia np. przetwornik pierwotny
-Wiele komercyjnie oferowanych czujników zawiera integralnie wmontowany
przetwornik
i wówczas nazwa „przetwornik rezystancyjny” jest w pełni uzasadniona
- Coraz częściej stosuje się tzw. czujniki inteligentne ( w zasadzie miniaturowy
System pomiarowy) wyposazone w wyjście interfejsu typu Ethernet )
10
2.
Właściwości statyczne i dynamiczne przetworników
pomiarowych
Treści omawiane w tym rozdziale dotyczyć mogą zarówno całego całego toru
pomiarowego (przetwornik + czujnik), jak i indywidualnie każdego z tych
elementów
2.1. Właściwości statyczne
Są opisywane za pomocą charakterystyk statycznych i takich parametrów jak
czułość przetwarzania, błąd przesunięcia zera, błąd nieliniowości
2.2. Właściwości dynamiczne
Są opisywane za pomocą charakterystyk
częstotliwościowych i
czasowych (odpowiedź na wymuszenie skokowe)
11
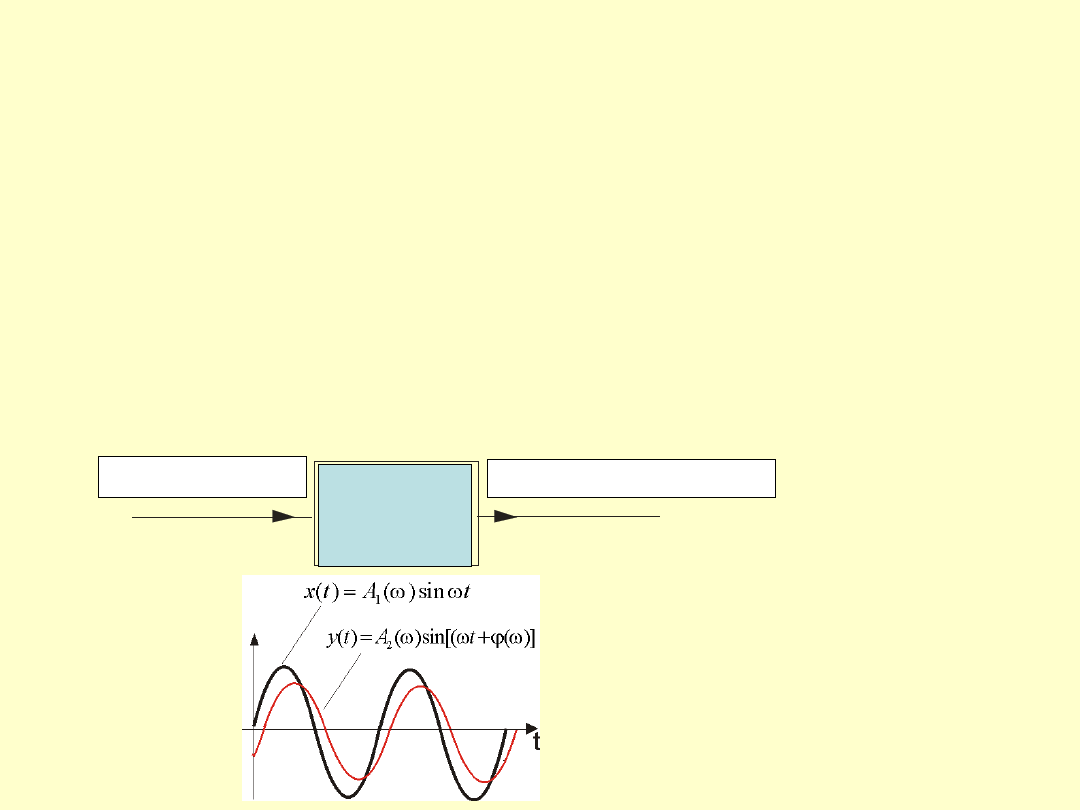
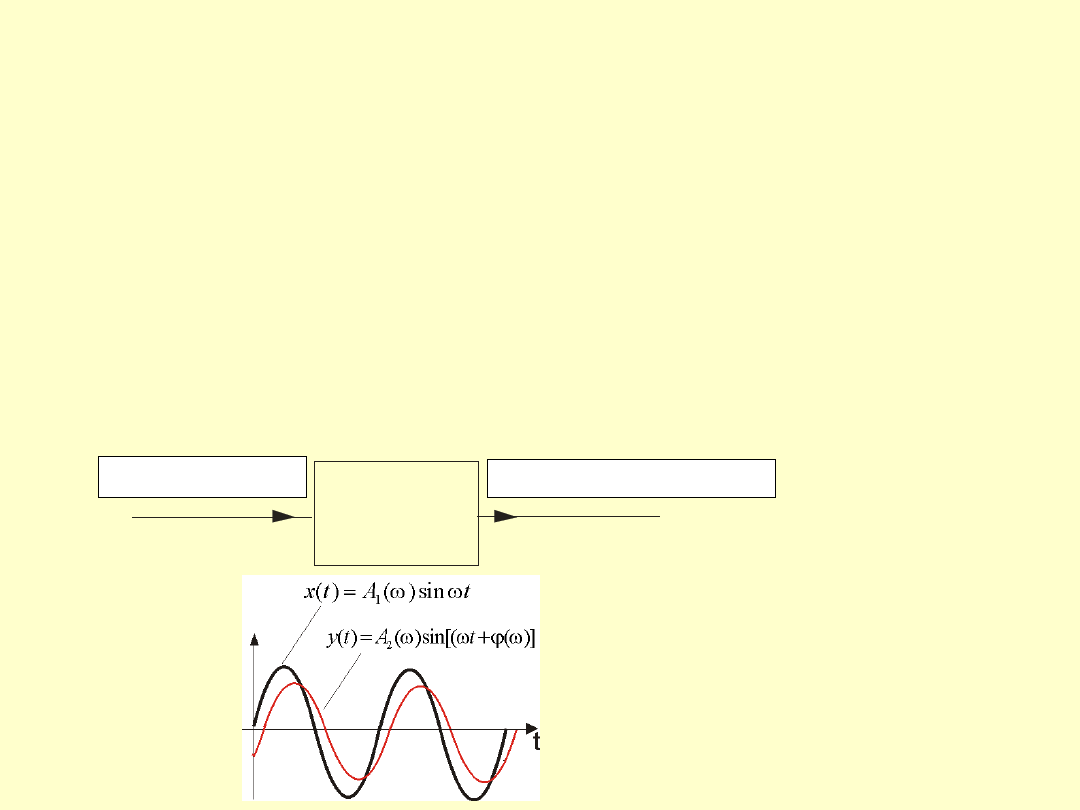
2.2.1. Charakterystyki częstotliwościowe
a) Badanie charakterystyk częstotliwościowych liniowego przetwornika pomiarowego
Jeżeli na wejście liniowego przetwornika pomiarowego doprowadzone
zostanie wymuszenie sinusoidalne (sygnał o przebiegu sinusoidalnym)
t
A
t
x
sin
)
(
)
(
1
o amplitudzie A1, pulsacji ω (ω=2Πf) i fazie = 0
0
, to na wyjściu (po zaniku
procesów przejściowych) pojawi się odpowiedź sinusoidalna:
)]
(
sin[(
)
(
)
(
2
t
A
t
y
o tej samej pulsacji, ale w ogólnym przypadku o innej amplitudzie i innej fazie φ.
Charakterystyki częstotliwościowe wyznacza się dla zakresu pulsacji od ω = 0 do ω →
∞
t
A
t
x
sin
)
(
)
(
1
)]
(
sin[(
)
(
)
(
2
t
A
t
y
Liniowy
element
automatyki
Badanie, którego celem jest
sporządzenie
charakterystyk
częstotliwościowych,
można
przeprowadzić
w
sposób
eksperymentalny
lub
teoretyczny – w tym drugim
przypadku wykorzystując opis
matematyczny wielkości zwanej
transmitancją widmową G(jω)
Przetwornik
12
Wynik badania:
• Charakterystyka Bodego
- amplitudowe charakterystyki
częstotliwościowe :
)
(
)
(
log
20
)
(
1
2
A
A
L
- fazowe charakterystyki
częstotliwościowe
)
(
)
(
f
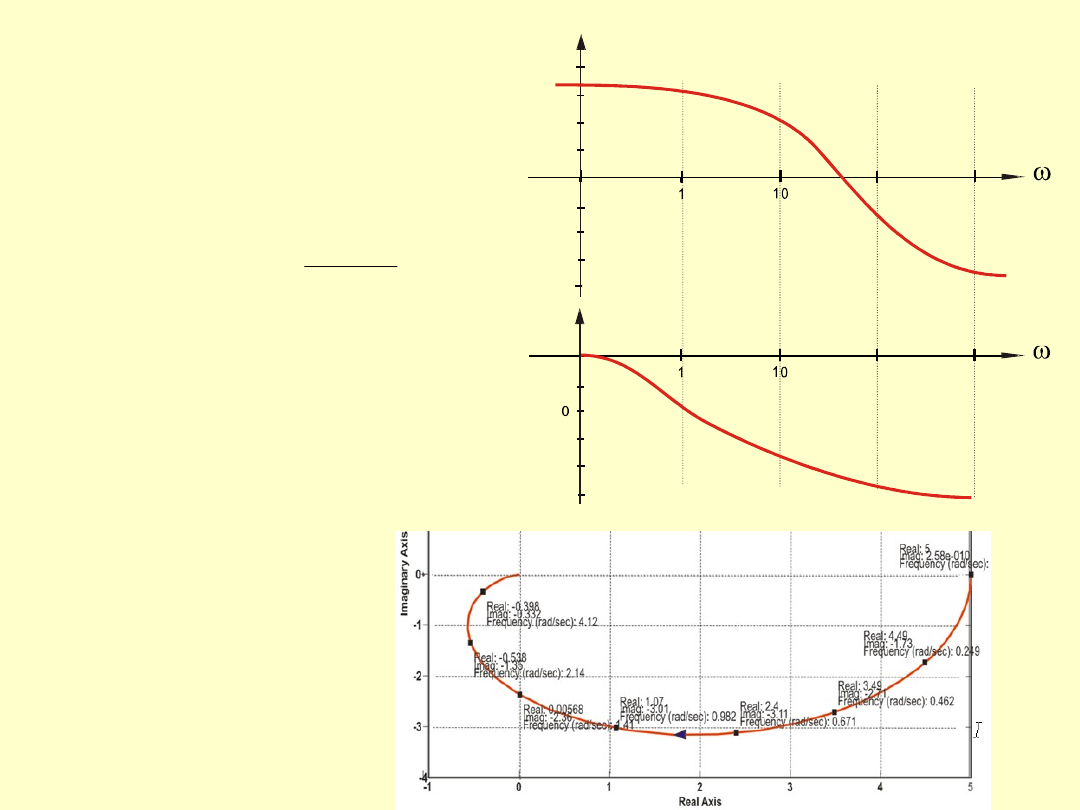
• Charakterystyka Nyquista
- 4 0
- 3 0
-
-
-
2
9
- 1 3 5
- 1 8 0
- 2 2 5
0
-
-
1
4 5
0
0
0
1 0
2 0
3 0
4 0
0
0
,
,
1
1
1 0 0
1 0 0
1 0 0 0
1 0 0 0
)
(
L
]
) [
(
0
13
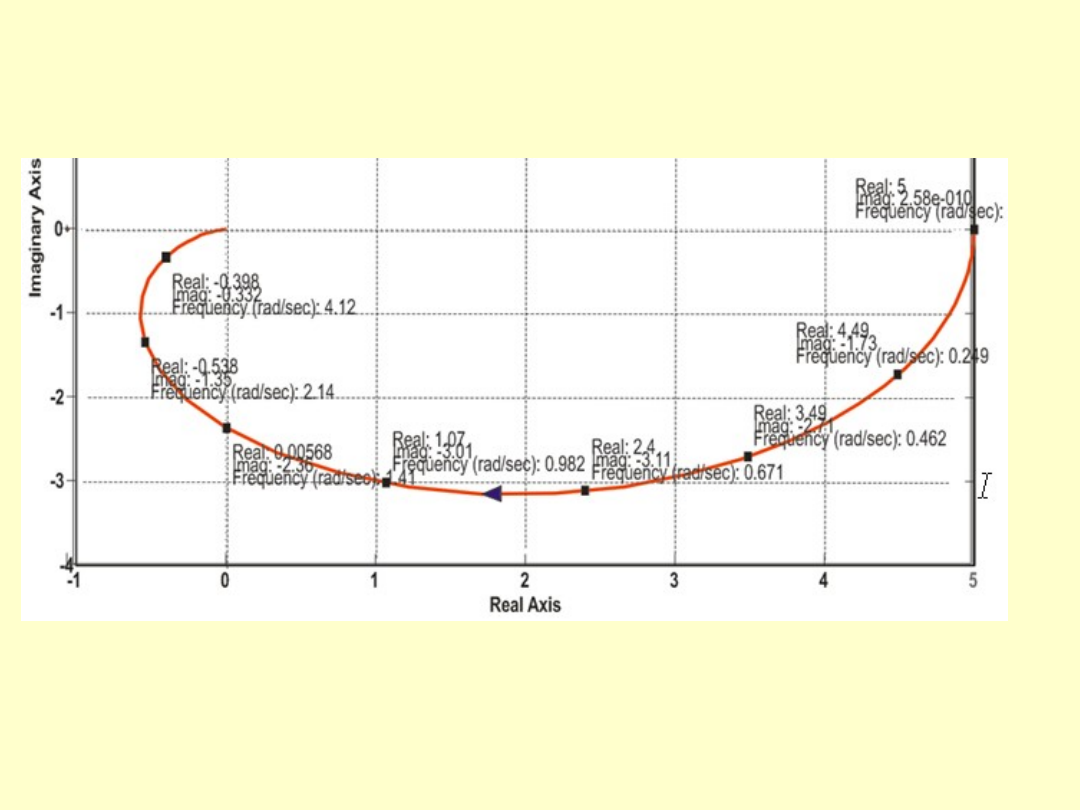
• Charakterystyka Nyquista
14
9.1. Pojęcia podstawowe, definicje
a) Badanie charakterystyk częstotliwościowych liniowego elementu automatyki
Jeżeli na wejście elementu lub układu liniowego stabilnego wprowadzone
zostanie wymuszenie sinusoidalne
t
A
t
x
sin
)
(
)
(
1
o amplitudzie A1, pulsacji ω (ω=2Πf) i fazie = 0
0
, to na wyjściu (po
zaniknięciu procesów przejściowych) pojawi się odpowiedź sinusoidalna:
)]
(
sin[(
)
(
)
(
2
t
A
t
y
o tej samej pulsacji, ale w ogólnym przypadku o innej amplitudzie i innej fazie φ.
Charakterystyki częstotliwościowe wyznacza się dla zakresu pulsacji od ω = 0 do ω →
∞
t
A
t
x
sin
)
(
)
(
1
)]
(
sin[(
)
(
)
(
2
t
A
t
y
Liniowy
element
automatyki
Badanie, którego celem jest
sporządzenie
charakterystyk
częstotliwościowych,
można
przeprowadzić
w
sposób
eksperymentalny
lub
teoretyczny – tym drugim
przypadku wykorzystując opis
matematyczny wielkości zwanej
transmitancją widmową G(jω)
elementu
lub
układu
automatyki
15
b) Transmitancja widmowa
Transmitancja widmowa G(jω) jest podstawą charakterystyk
częstotliwościowych i definiujemy ją jako:
Transmitancja widmowa jest funkcją zespoloną i może być
przedstawiona w postaci wykładniczej lub algebraicznej.
j
s
s
G
j
G
)
(
)
(
1
3
)
(
s
s
G
1
3
)
(
j
j
G
W celu określenia wzoru na G(jω) podstawiamy s=jω i
otrzymujemy:
Przykład: transmitancja operatorowa ma postać:
• Postać wykładnicza transmitancji widmowej
)
(
)
(
1
)]
(
[(
2
)
(
)
(
)
(
)
(
)
(
)
(
j
t
j
t
j
e
M
e
A
e
A
j
X
j
Y
j
G
gdzie: M(ω): moduł transmitancji widmowej:
M(ω) = |G(jω) |=A2(ω)/ A1(ω)
16
•
Postać algebraiczna transmitancji widmowej
)
(
)
(
)
(
jQ
P
j
G
gdzie:
P(ω)=Re[G(jω)
]
Q(ω)=
Im[G(jω)]
)
(
)
(
)
(
)
(
2
2
Q
P
j
G
M
- moduł transmitancji G(jω)
)
(
)
(
)
(
P
Q
arctg
- argument transmitancji G(jω
)
17
9.2. Charakterystyki częstotliwościowe Nyquista i Bodego
a) charakterystyka amplitudowo-fazowa (wykres Nyquista)
Charakterystyka amplitudowo-fazowa (wykres Nyquista) jest to
miejsce geometryczne punktów, które wyznaczają końce wektorów
G(jω) na płaszczyźnie zmiennej zespolonej przy zwiększaniu pulsacji
ω od wartości ω = 0 do ω → ∞
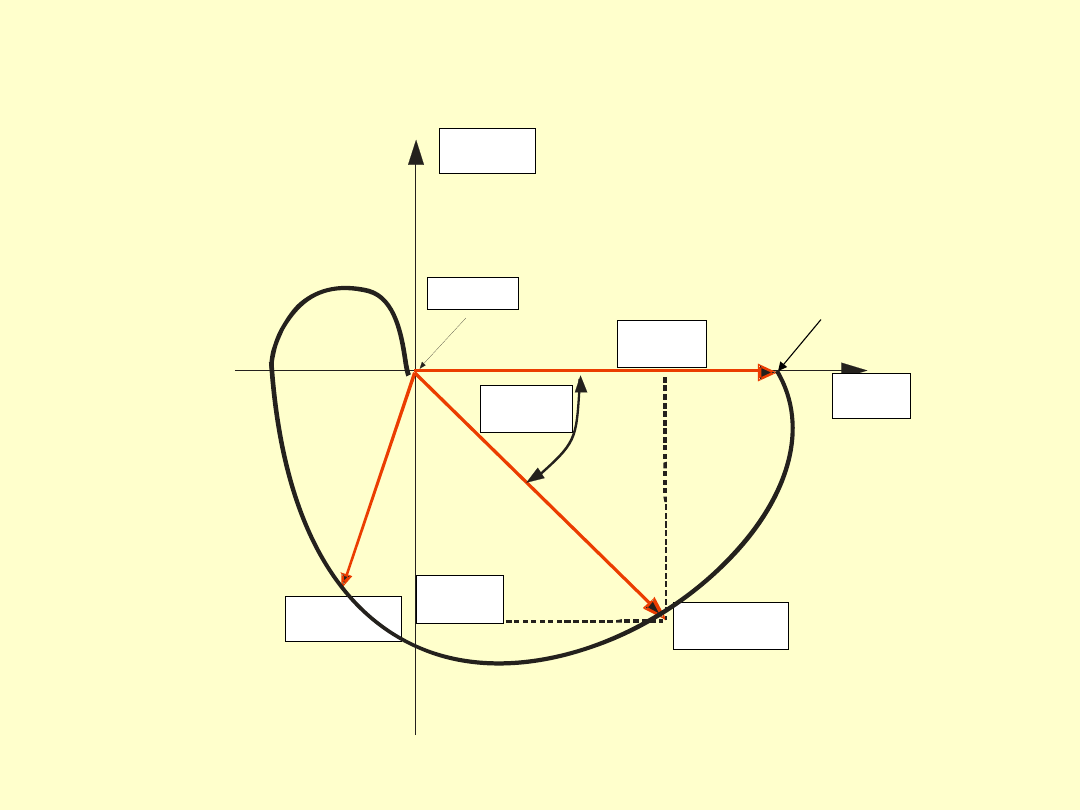
18
)
(
jQ
)
(
P
)
(
0
P
0
0
)
(
1
Q
)
(
1
P
)
(
1
1
j
G
)
(
2
2
j
G
Ą
)
(
1
1
19
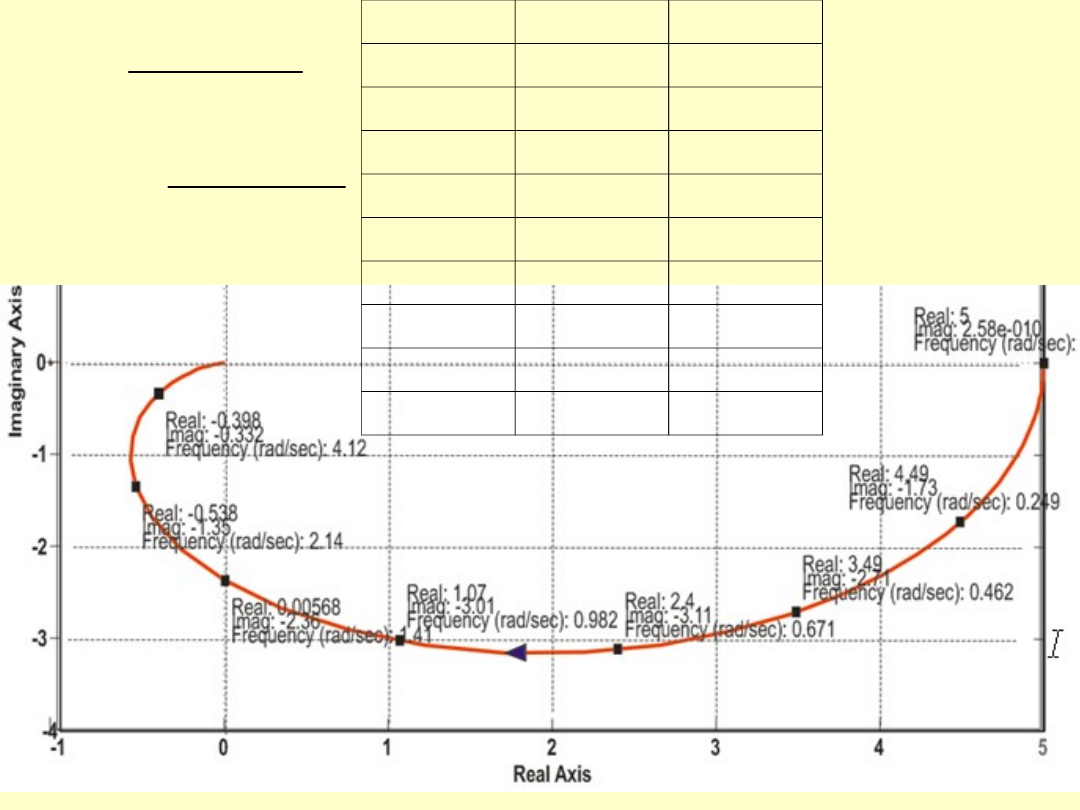
Przykład 1
Wyznaczyć częstotliwościową zespoloną charakterystykę charakterystykę
Nyquista dla elementu, którego transmitancja operatorowa wyrażona jest
wzorem:
)
2
)(
1
(
10
)
(
s
s
s
G
)
2
)(
1
(
10
)
(
s
s
s
G
•
→
)
2
)(
1
(
10
)
(
j
j
j
G
•
Postać algebraiczna transmitancji widmowej G(jω):
4
5
30
4
5
10
20
4
5
30
10
20
9
4
4
30
10
20
)
3
(
)
2
((
30
10
20
]
3
)
2
][(
3
)
2
[(
]
3
)
2
[(
10
2
2
10
)
2
)(
1
(
10
)
(
2
4
2
4
2
2
4
2
2
4
2
2
2
2
2
2
2
2
2
2
j
j
j
j
j
j
j
j
j
j
j
j
j
G
20
4
5
10
20
)
(
2
4
2
P
4
5
30
)
(
2
4
Q
ω[1/s]
P(ω)
Q(ω)
0
5
0
0,249
4,49
-1,73
0,462
3,49
-2,71
0,671
2,4
-3,11
0,982
1,07
-3,01
1,41
-0,056
--2,36
2,14
-0,538
-1,35
4,12
-0,398
-0,332
∞
0
0
21
b) Częstotliwościowe charakterystyki logarytmiczne (Charakterystyki Bodego)
Wykonuje się dwa osobne, usytuowane jeden pod drugim, wykresy:
amplitudowej charakterystyki częstotliwościowej L(ω), przy
czym L(ω)obliczamy z zależności L(ω) = 20log M(ω) [dB] (wynik
wyrażony jest w dB) zatem:
2
2
)]
(
[
)]
(
[
log
20
)
(
Q
P
L
• fazowej charakterystyki częstotliwościowej
φ (ω)
Podziałka osi odciętych obydwu wykresów przedstawiona
jest
w skali logarytmicznej.
22
- 4 0
- 3 0
-
-
-
2
9
- 1 3 5
- 1 8 0
- 2 2 5
0
-
-
1
4 5
0
0
0
1 0
2 0
3 0
4 0
0
0
,
,
1
1
1 0 0
1 0 0
1 0 0 0
1 0 0 0
)
(
L
]
) [
(
0
23
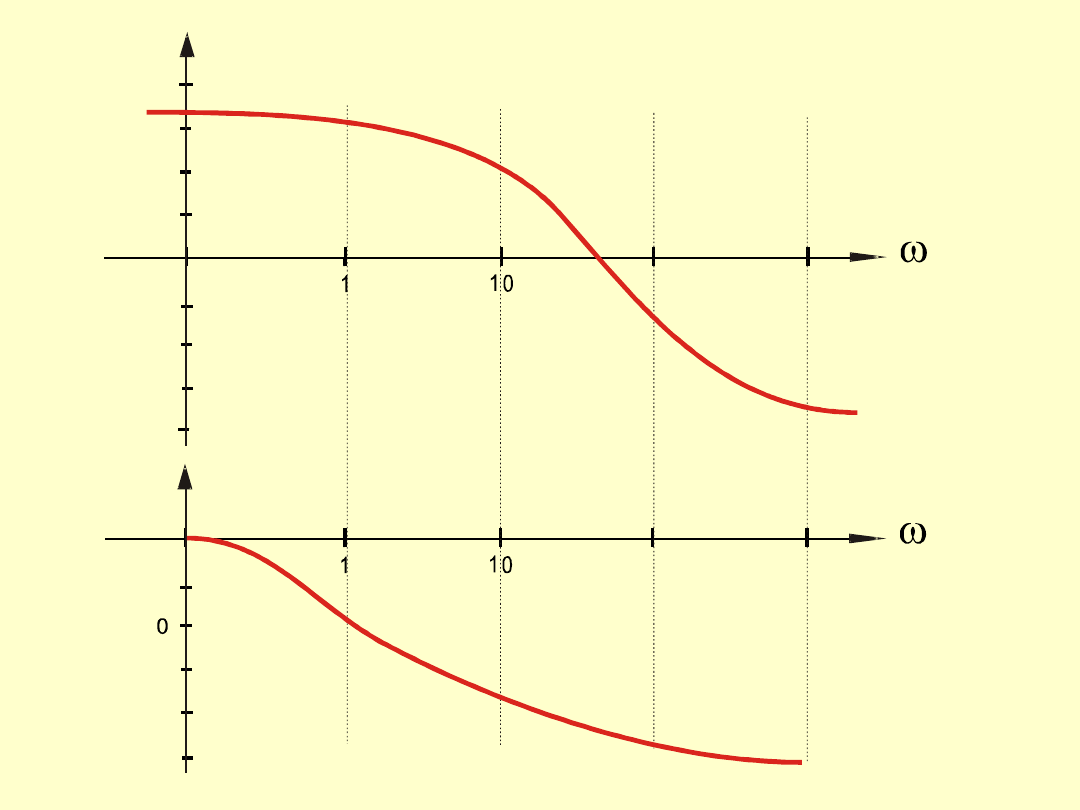
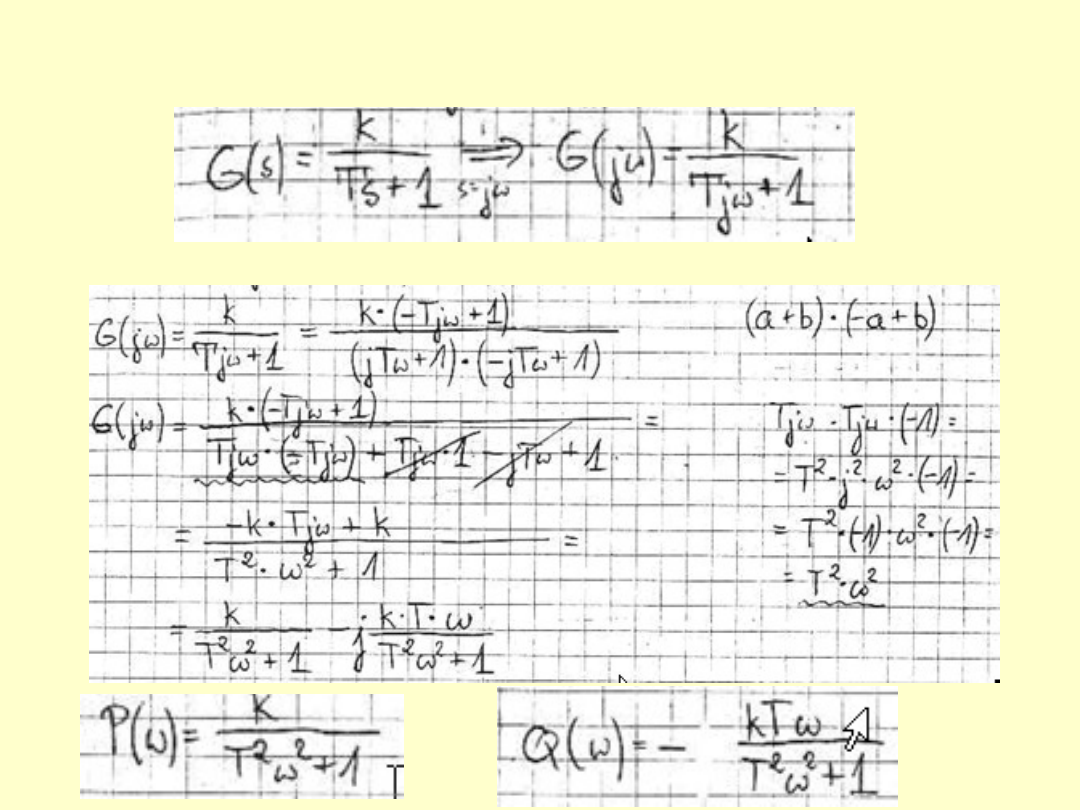
10.4 Człon inercyjny I rzędu
a)
Transmitancja
widmowa
b) P(ω), Q(ω)
24
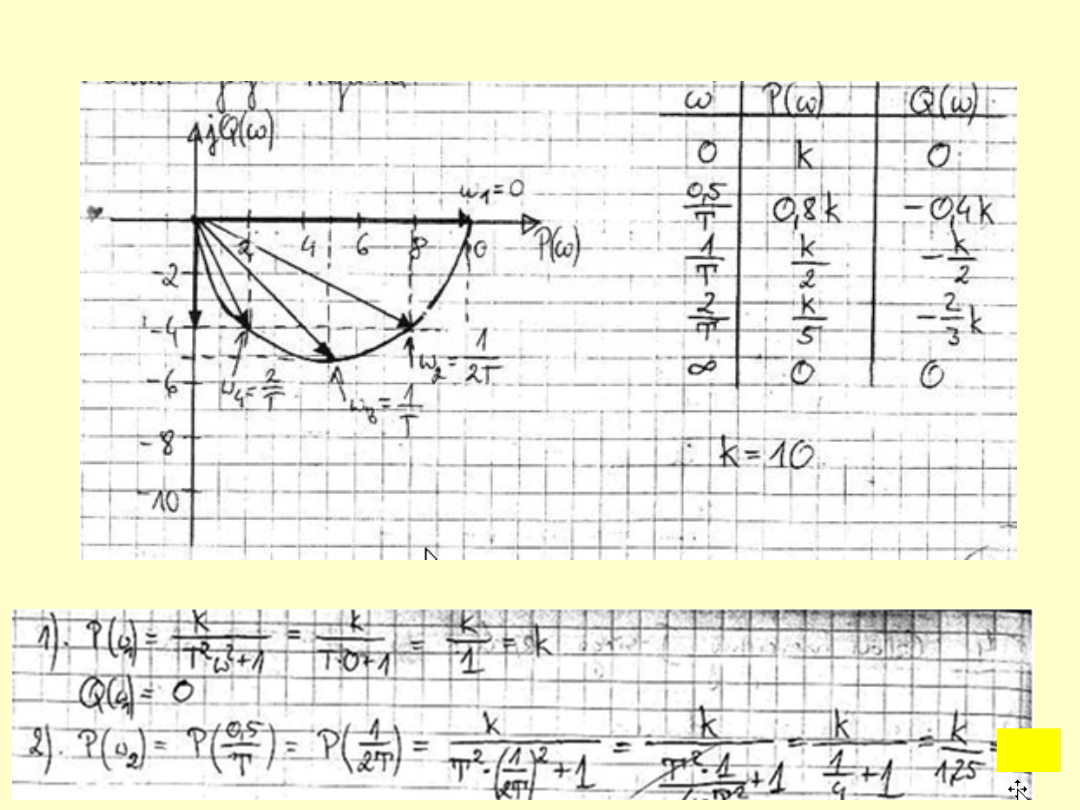
c) Charakterystyka Nyquista
Przykładowe obliczenia:
0,8
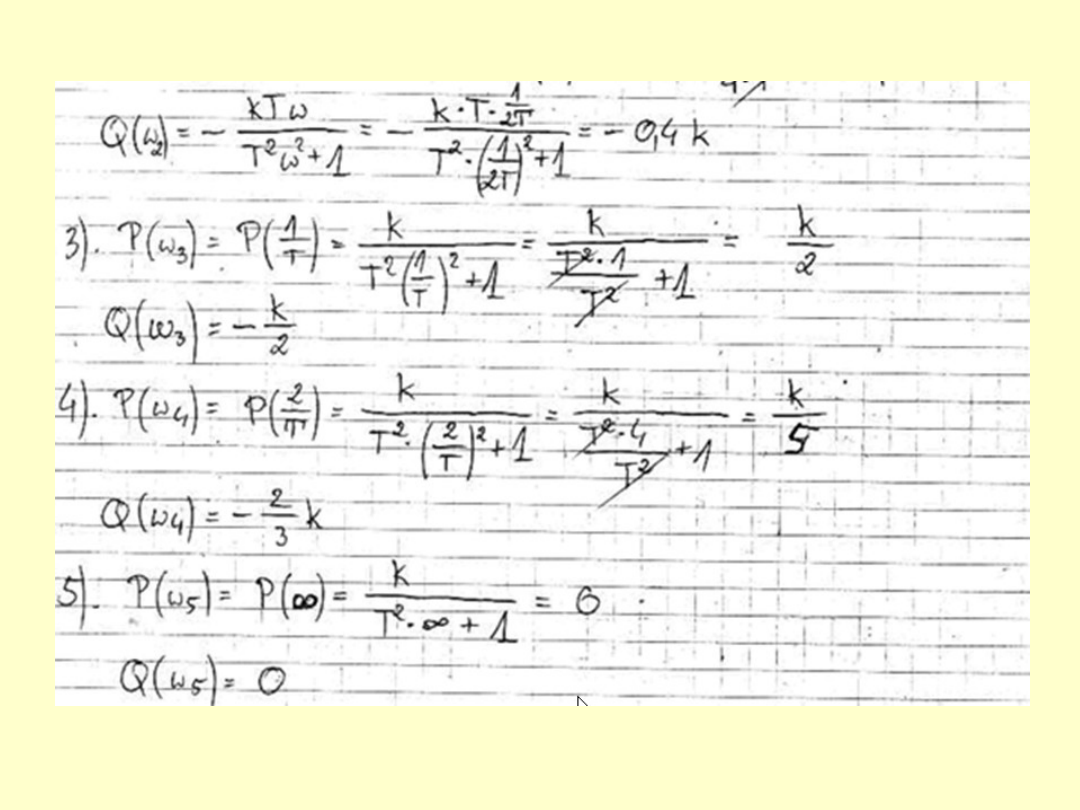
25
Przykładowe obliczenia:
26
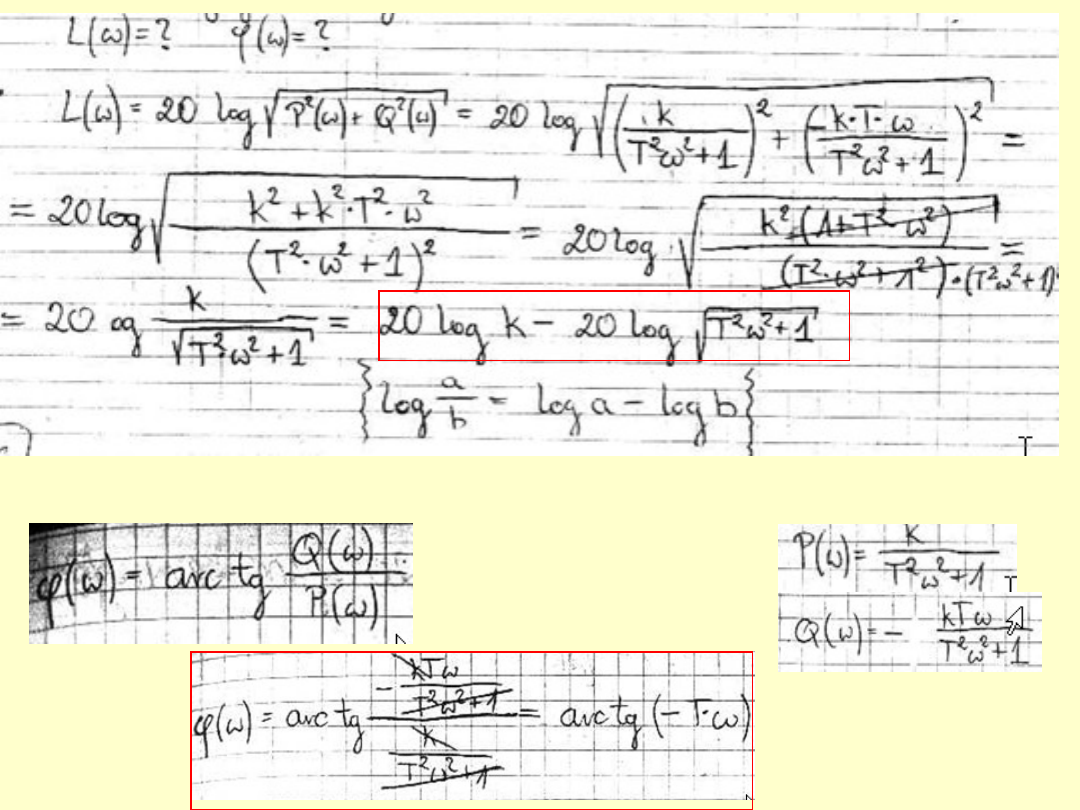
d) Charakterystyka Bodego
wstawiam P(ω), Q(ω):
Zatem φ(ω):
27
• Obliczamy L(ω): i φ(ω) dla kolejno zwiększajacych
się wartości pulsacji wyrażonej w jednostkach
względnych jako:
• Wprowadzamy pojęcie tzw. pulsacji
granicznej:
T
g
1
g
Przykładowe obliczenia:
1)
dB
K
L
g
g
20
0
20
1
01
,
0
log
20
10
log
20
1
)
(
log
20
log
20
)
01
,
0
(
2
2
1
2)
dB
L
g
20
)
1
,
0
(
1
3)
dB
L
g
17
)
1
(
1
4)
dB
L
g
0
)
10
(
1
5)
dB
L
g
20
)
100
(
1
28
L (
z lin e a r y z o w a n a
n a c h y le n ie :
- 2 0 d B / d e k a d ę
1
10
1
)
(
T
j
T
j
k
j
G
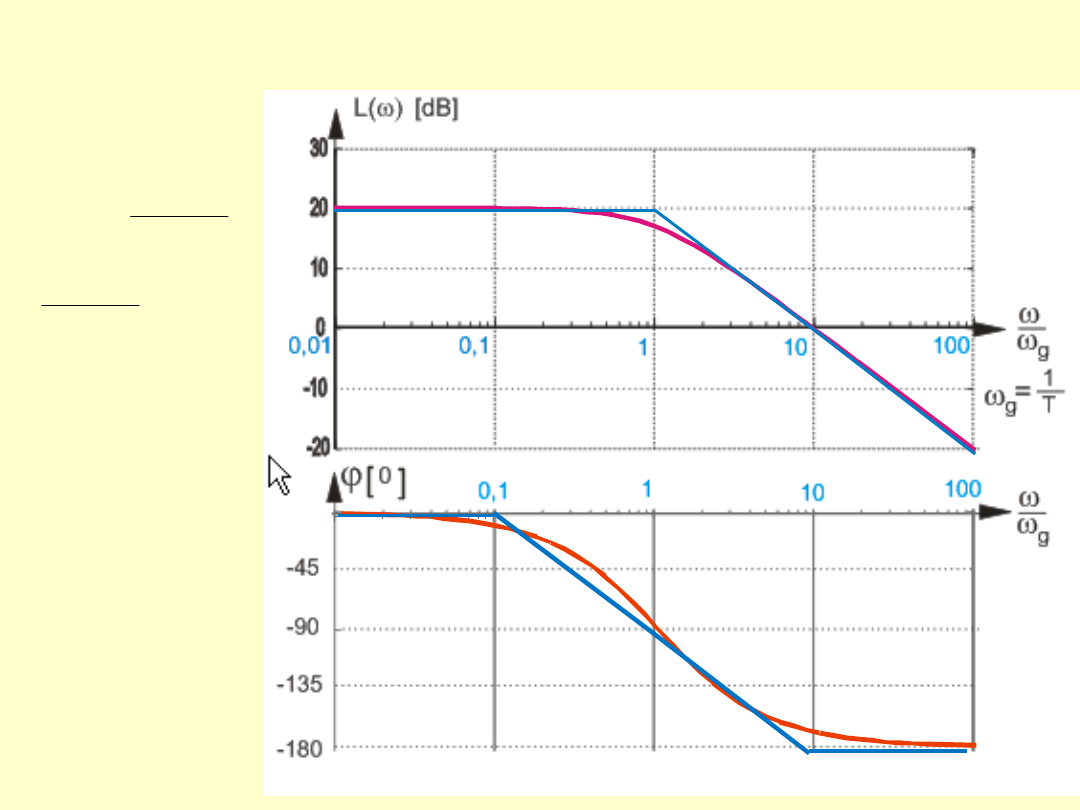
Charakterystyka Bodego członu inercyjnego I rzędu
wykres wykonano dla k=10
29
Charakterystyka zlinearyzowana składa się z dwóch pólprostych.
Pierwsza jest równoległa do osi pulsacji dla pulsacji spełniajacych warunek:
g
0
gdzi
e:
T
g
1
Druga półprosta zaczyna się w punkcie odpowiadającym pulsacji ω
g
,
przy czym nachylenie tej półprostej wynosi 20 db/dekadę
Zależności matematyczne opisujace obydwie półproste:
g
g
T
k
L
dla
log
20
log
20
0
dla
log
20
)
(
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
Wyszukiwarka
Podobne podstrony:
5 Podstawy Metrologii systemy pomiarowe
wyklad 2012 10 25 (Struktury systemów komputerowych)
Podstawy Informatyki Wykład V Struktury systemów komputerowych
Canon system pomiaru błysku
PROGRAMOWANIE SYSTEMU POMIAROWEGO
etzi-zagadnienia do zaliczenia-2016, ELEKTRONIKA I TELEKOMUNIKACJA PRZ - systemy pomiarowe i diagnos
Miernictwo i systemy pomiarowe II LAB
Program Laboratorium Komputerowe systemy pomiarowe Gawędzki KSP
1. Podstawowe określenia. Jednostki miary, AM Gdynia, Sem. III,IV, Miernictwo i systemy pomiarowe- D
Systemy pomiarowe kolos 1 Wolszczak
systemy pomiarowe 2 kolos Wolszczak
szablon ćw.6, PWSZ Nowy Sącz, II semestr, METROLOGIA I SYSTEMY POMIAROWE, Metrologia
lab6, MECHATRONIKA 1 ROK PWSZ, SEMESTR II, Metrologia techniczna i systemy pomiarowe, Laborki
Techniki i systemy pomiarowe-III semestr', ZESTAWY, ZESTAW 1
Struktura systemu operacyjnego
OMÓWIENIE ELEMENTÓW STRUKTURY SYSTEMU OPERACYJNEGO
MIERNICTWO I SYSTEMY POMIAROWE 30 04 2012 Mech
KP1 POMIARY WYMIARÓW ZEWNĘTRZNCH, AM Gdynia, Sem. III,IV, Miernictwo i systemy pomiarowe- Daszyk
więcej podobnych podstron