
1
SYGNAŁY I PARAMETRY DIAGNOSTYCZNE
1. Pozyskiwanie informacji
W procesie poznawania systemów technicznych,
zjawisk lub zdarzeń niezmiernie istotne są sygnały
pozwalające poznawać ich strukturę lub działanie.
Zrozumiane znaczenia ciągu odbieranych sygnałów
(procesów fizycznych) to informacją powiększającą
wiedzę odbiorcy o poznawanej rzeczywistości.

2
Informacja jest na równi z energią i substancją jedną z
form istnienia materii, pozostaje w ścisłym związku z
ruchem materii w przestrzeni i w czasie, z wszelkimi
procesami
materialnymi,
przedstawia
więc
uporządkowane odbicie świata realnego i istniejących
związków przyczynowo-skutkowych. Wyróżnia się dwa
rodzaje informacji, informacje jakościową wyrażoną
przez pojęcia koloru, smaku, zapachu lub przez
wnioskowanie logiczne oraz informację ilościową
wyrażoną w postaci liczbowej. Zatem informacja
ilościowa stanowi podstawę poznania naukowego,
według powiedzenia: ,,nauka zaczyna się wtedy, kiedy
zaczyna się mierzenie". Zasadniczym źródłem informacji
pomiarowej jest eksperyment pomiarowy, bezpośrednio
dostarczający liczbowej charakterystyki wyróżnionej
właściwości (wielkości fizycznej) badanego obiektu lub
zjawiska.

3
Złożoność operacji koniecznych do przeprowadzenia
pomiarów jest wykonalna jedynie pod warunkiem użycia
metody pomiarów elektrycznych, opierającej się na
przekształceniu mierzonej wielkości mechanicznej w
równoważny jej sygnał elektryczny. Zatem, każdą
mierzoną wielkość mechaniczną przekształca się za
pomocą
odpowiednich
przetworników
w
sygnał
elektryczny, który dalej jest dopiero wzmacniany,
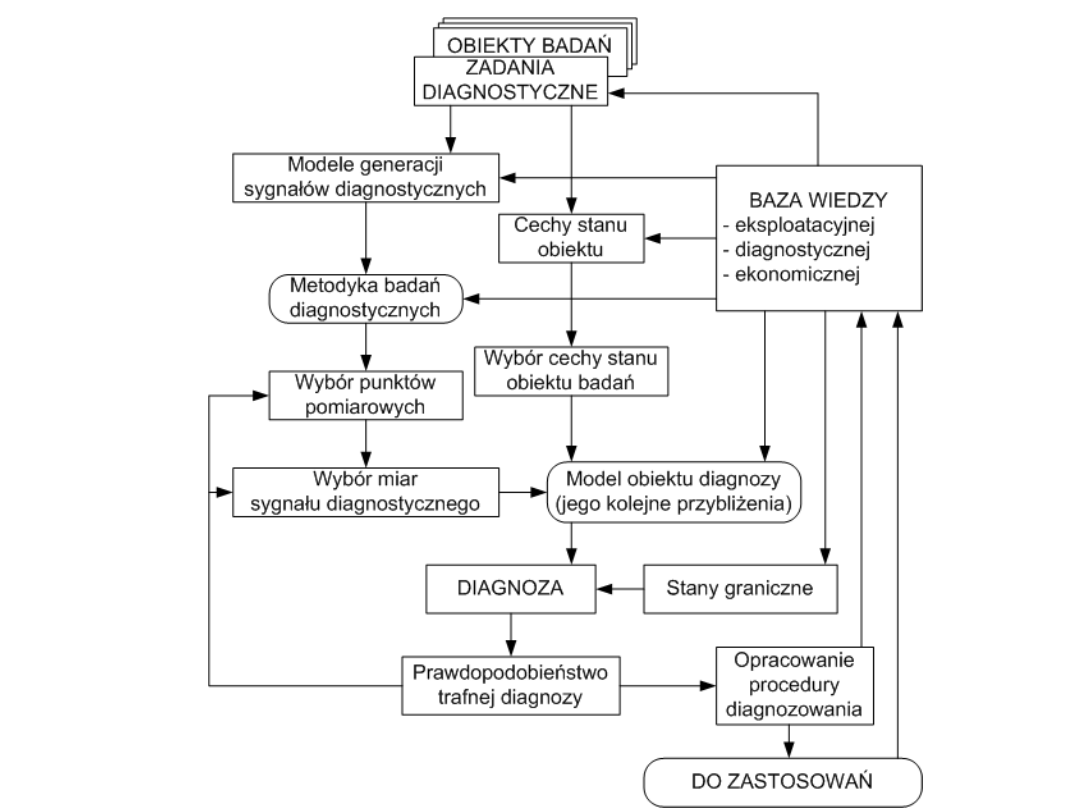
przetwarzany i poddawany analizie.

4
Funkcje
pomiarowo-analizujące
mogą
spełniać
przyrządy o rożnej konstrukcji i zasadzie działania
(analogowej,
cyfrowej,
hybrydowej).
W
procesie
pomiarowym
istotne
jest
przedstawienie
sposób
organizacji
systemu
badania
diagnostycznego,
widzianego zawsze w kategoriach: źródło-droga
przetwarzania-odbiornik.
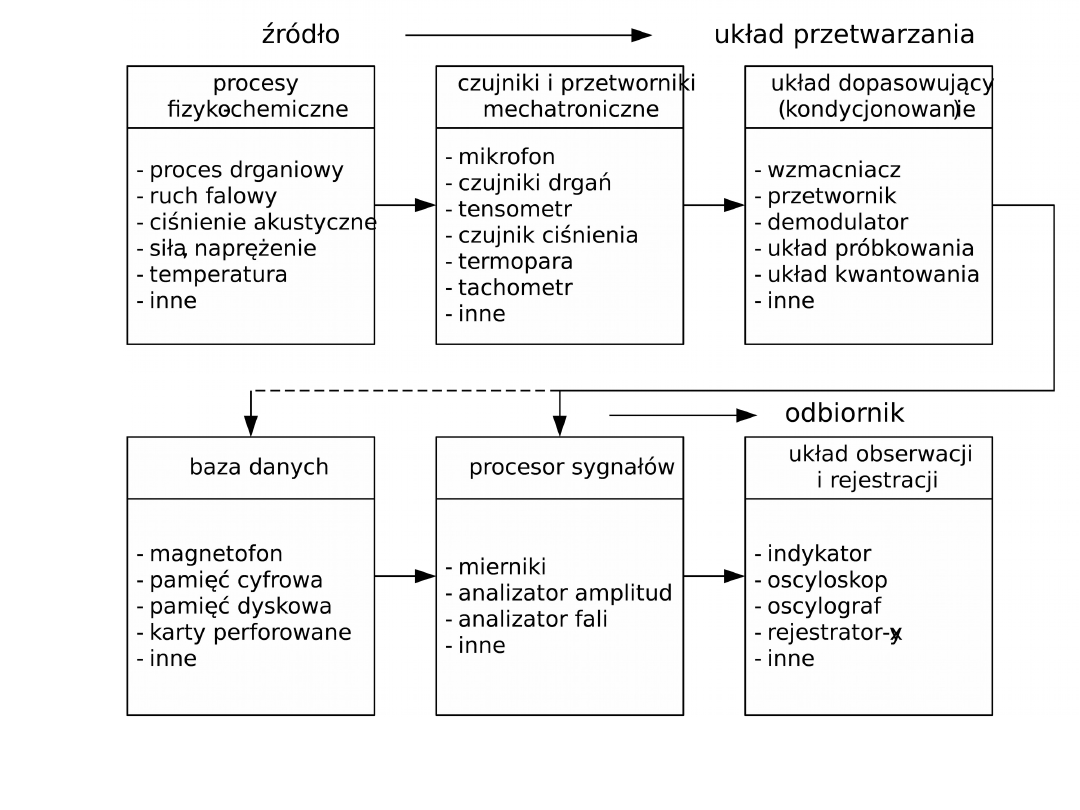
5
Rys. 1. Podstawowy system pomiaru i analizy procesów podczas
diagnozowania

6
Jak przedstawiono to na rysunku 1, źródłem informacji
może być np. ruch wibracyjny lub falowy w gazie, cieczy
lub ciele stałym, który podlega identyfikacji. Droga
przetwarzania zaczyna się w przetworniku wielkości
mechanicznej
na
elektryczną,
poprzez
układ
dopasowania a kończy się na właściwym procesorze
wypracowującym estymatory stanu badanego obiektu.
Jako odbiorniki informacji pomiarowej występuję:
urządzenia przetwarzania danych, urządzenia sterowania
logicznego
lub
najczęściej
człowiek
(operator),
wyposażony w cały arsenał środków rejestracji,
wizualizacji i indykacji informacji diagnostycznej.

7
W celu uzyskania oceny jakości pomiaru oraz
opracowania
wymagań
dotyczących
aparatury
pomiarowej wydziela sie główne zjawiska i czynniki
wpływające na proces pomiarowy, tworzące model
informacyjny. Główne założenia takiego modelu są
następujące:
mierzona wielkość fizyczna jest traktowana jako
proces losowy zawierający informację o stanie
badanego obiektu i opisana jest przez ciąg wartości
przypadkowych lub uogólnione charakterystyki tego
ciągu (wartość oczekiwaną, wariancję); rzeczywista
wartość (chwilowa) wielkości mierzonej może
pozostawać nieokreślona na danym etapie procesu
pomiarowego;

8
w przypadku ogólnym pomiar uważa się za ciąg
operacji o ograniczonym i skończonym czasie
trwania a bezpośredniego porównania wielkości
mierzonej z jednostką miary nie dokonuje się wcale;
właściwości
urządzenia
pomiarowego
mogę
zmieniać się w czasie pod wpływem zmiennych z
natury czynników zewnętrznych, traktowanych jako
procesy losowe wpływające na nieokreśloność
wyniku pomiaru.

9
Urządzenia stosowane do budowy systemów
pomiarowych powinny charakteryzować się zgodnością
w
zakresie
informatycznym,
konstrukcyjnym,
metrologicznym
i
eksploatacyjnym.
Zgodność
urządzeń w podanych zakresach zapewnia łatwe
zestawianie z nich systemu pomiarowego do realizacji
różnych zadań.
Zgodność informatyczna dotyczy głownie złącz
poszczególnych urządzeń, ułatwiających tworzenie
różnych struktur pomiarowych. Wymagana jest także
zgodność kodów stosowanych przez poszczególne
urządzenia
by
kodowanie
komunikatów
było
jednoznaczne.

10
Zgodność konstrukcyjna dotyczy parametrów
konstrukcyjnych i ergonomicznych urządzeń, a także
możliwości ich mechanicznego łączenia w celu uzyskania
zwartej i jednolitej konstrukcji zestawu pomiarowego.
Zgodność metrologiczna dotyczy jednolitego
sposobu wyrażania parametrów dokładności mierzonych
wielkości dla łatwości ustalenia błędów wypadkowych
torów pomiarowych i dokładności wyników końcowych.
Zgodność eksploatacyjna obejmuje jednolite
wymagania w zakresie możliwości pracy w podobnych
warunkach
otoczenia
(temperatury,
wilgotności,
zapylenia,
zakłóceń
elektromagnetycznych),
porównywalnej trwałości i niezawodności poszczególnych
urządzeń.

11
Jednym
z
ważniejszych
zagadnień
podczas
pozyskiwania informacji diagnostycznej jest zapewnienie
możliwości
przeprowadzenia
interpretacji
fizycznej
mierzonego procesu. Problem ten jest szczególnie ważny
dla początkujących badaczy, dla których opis i fizyka
rejestrowanych zjawisk jest podstawą prowadzonych
rozważań jakościowych i bazą przyszłej wiedzy
diagnostycznej.
Zawsze
początki
badania
diagnostycznego,
szczególnie
nowych
obiektów,
zaczynają się rozpoznaniem fizyki uszkodzeń, generacji i
opisu procesów i sygnałów diagnostycznych, możliwości
ich przetwarzania, rejestracji i wizualizacji dostosowanej
do możliwości odbiorcy.

12
Przykładowy zestaw aparatury
do
pomiarów
analogowych przedstawiono na rysunku 2, gdzie całe
przetwarzanie analogowe rejestrowanych z obiektu
sygnałów
przeprowadzane
jest
w
procesorze
analogowym. Może to być np. przyrząd mierzący wprost
wymagany parametr, który jest obliczany bezpośrednio
w tym przyrządzie (pomiar temperatury, analizator
widma korelator, wartość ciśnienia itd.).
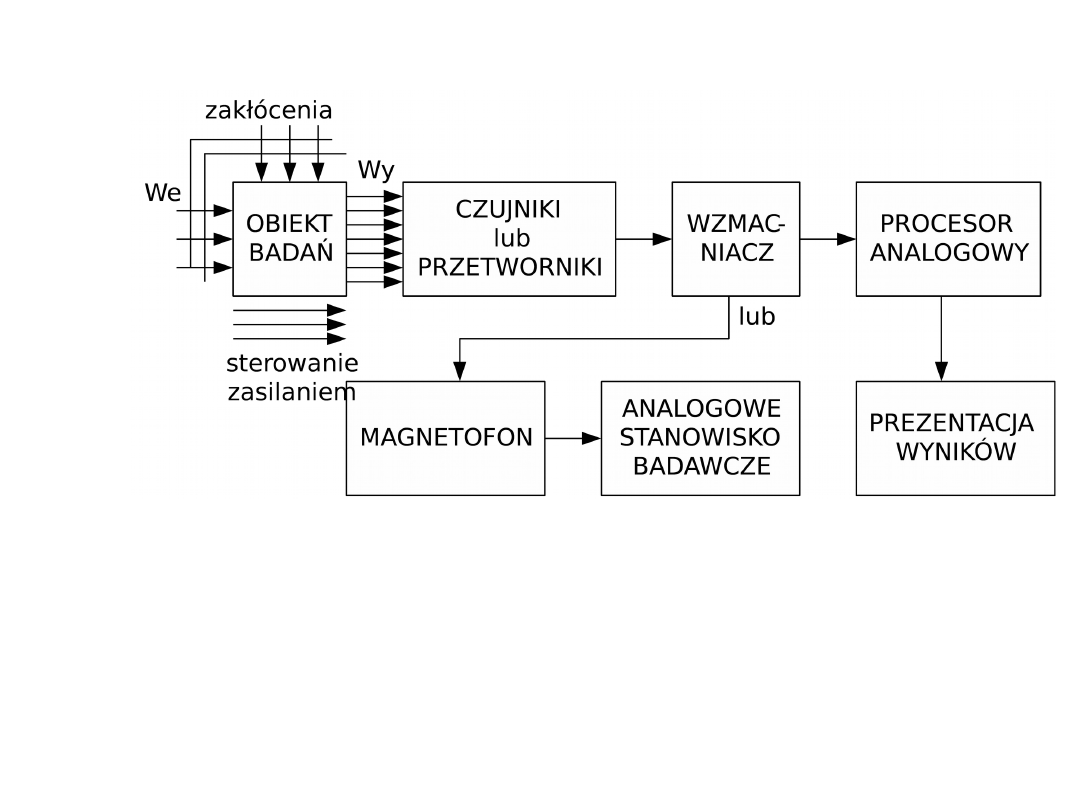
13
Rys. 2. Analogowe stanowisko badawcze

14
Możliwości technik informatycznych, wspieranych
dynamicznym rozwojem elektroniki oraz sztucznej
inteligencji (systemów ekspertowych i sieci neuronowych
z
udziałem
logiki
rozmytej)
zrewolucjonizowały
dotychczasowe sposoby badania diagnostycznego.
Obserwuje
się
tworzenie
układów
pomiarowych
mieszanych, gdzie dokonuje się pomiarów zarówno w
torach analogowych oraz równolegle w torach cyfrowych
(rysunek 3) oraz układy pomiarowe oparte tylko na
technice cyfrowej. Te ostatnie systemy pomiarowe mają
możliwość zwrotnego oddziaływania na badany obiekt,
umożliwiając
jego
optymalne
sterowanie
lub
wymuszanie
odpowiednich
stanów
dla
celów
badawczych.
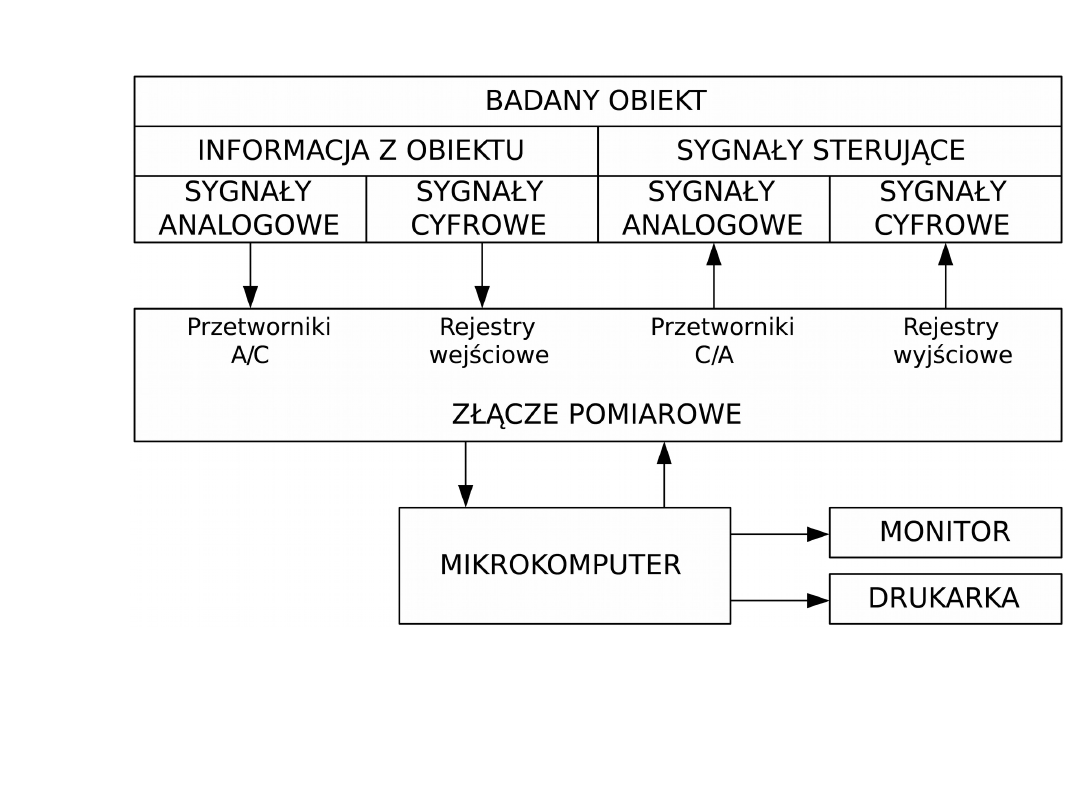
15
Rys. 3. Analogowo-cyfrowy układ pomiarowy

16
Różnorodność celów i warunków prowadzenia
eksperymentu pomiarowego, jak również żądań co do
wyników metod ich opracowywania pociągają za sobą
ogromną
liczbę
możliwych
wariantów
budowy
informacyjnych systemów pomiarowych, przez co nie
można mówić o ich unifikacji. Jednak rożne konfiguracje
systemów
pomiarowych
wskazują,
że
istnieją
powtarzalne elementy takich systemów pokazane
schematycznie na rys. 4.
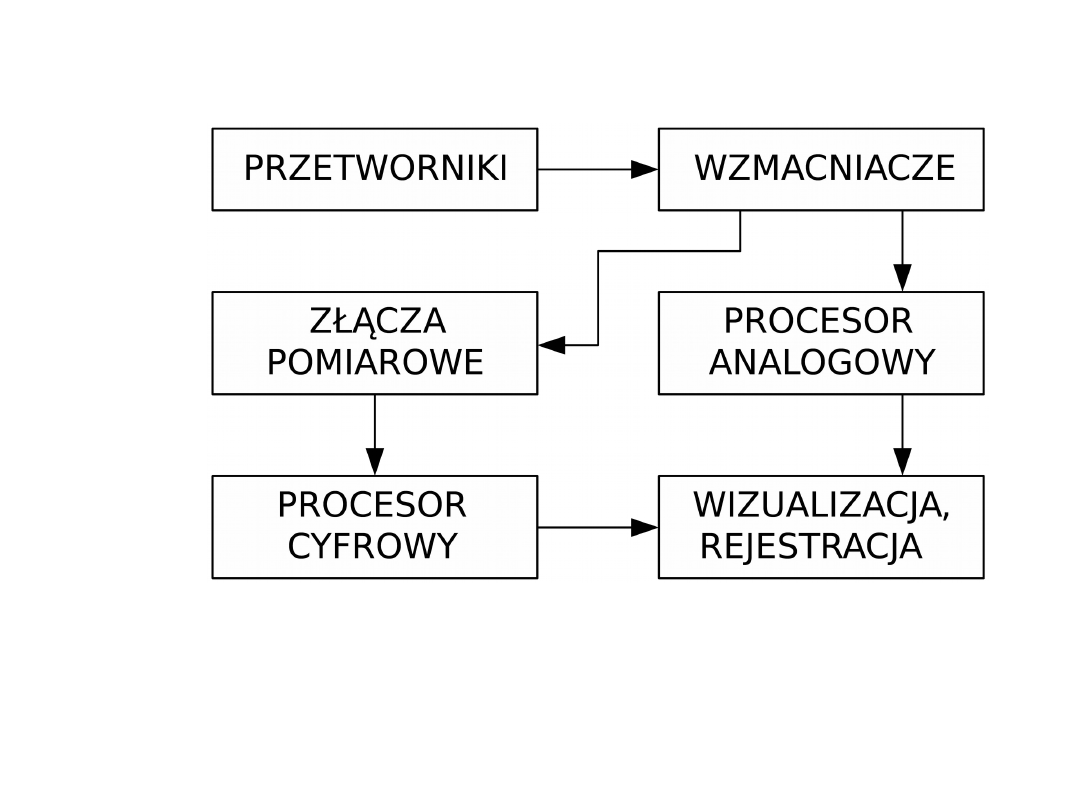
17
Rys. 4. Główne elementy układów pomiarowych

18
PRZETWORNIK
POMIAROWY
stanowi
względnie
wyodrębniony zespół elementów, które służą do przetwarzania z
określoną dokładnością i według określonego prawa wartości
wielkości mierzonej na wartość innej wielkości. Przetworniki
zbudowane są z trzech rodzajów elementów podstawowych:
elementy powodujące straty energii (generowanej przez
obiekt) rozpraszanej na energię cieplną, np. w wyniku tarcia
występowania rezystancji w układach elektrycznych, oporu
przepływu gazów i cieczy;
elementy magazynujące energię z obiektu w postaci
kinetycznej (masą indukcyjność w układach elektrycznych);
elementy magazynujące energię obiektu w postaci
potencjalnej
(sprężyny
w
układach
mechanicznych,
pojemność w układach elektrycznych, sprężony gaz).

19
W układach pomiarowych wielkości nieelektrycznych
stosowane są przetworniki, w których następuje
przetworzenie tej wielkości na wielkość elektryczną.
Generalnie przetworniki dzieli się na generacyjne i
parametryczne.
Przetworniki
generacyjne
(zwane
również
aktywnymi) przetwarzają bezpośrednio sygnał wejściowy
w sygnał wyjściowy, a energię wejściową w energię
elektryczną.
W
przetwornikach
generacyjnych
wykorzystuje się zjawiska indukcji elektromagnetycznej,
zjawiska
termoelektryczne,
piezoelektryczne,
magnetostrykcyjne, fotoelektryczne, elektrochemiczne
oraz zjawisko szumów cieplnych.

20
Drugą
grupę
stanowię
przetworniki
parametryczne (pasywne), w których sygnał wejściowy
powoduje zmianę jakiegoś parametru przetwornika np.
impedancji, rezystancji albo wielkości bezpośrednio z
nimi związanych, takich jak tłumienie, dobroć,
częstotliwość rezonansowa itp., w takt zmian pola
zjawiskowego generowanego przez badany obiekt.
Dostarczana z zewnątrz do przetwornika energia
elektryczna przekształca te zmiany na równoważny prąd
lub napięcie elektryczne.

21
Podstawowe rodzaje przetworników:
1. Czujniki oporowo-tensometryczne, reagujące na
odkształcenia i na wszelkie zmiany wymiarów
geometrycznych.
Stosowane
są
do
pomiarów
odkształceń i naprężeń, a pośrednio do pomiarów siły,
ciśnienia momentu zginającego i skręcającego oraz
drgań.
2. Czujniki oporowo-termiczne i termoelektryczne,
reagujące na zmiany temperatury. Czujniki oporowo-
termiczne pośrednio mierzą także wszystkie wielkości,
od których zależy wymiana ciepła ogrzanego drucika
metalowego z otoczeniem, jak: prędkość przepływu
gazów i cieczy, skład mieszanin gazowych, ciepło
właściwe gazów i płynów itd.

22
3. Czujniki
indukcyjne,
magnetosprężyste
i
magnetoindukcyjne, reagujące na zmiany wielkości
geometrycznych,
zmieniając
przy
tym
swoje
własności
indukcyjne,
magnetyczne,
stopień
sprzężenia.
4. Czujniki pojemnościowe, reagujące także na
zmiany wymiarów geometrycznych, stosowane
często do pomiarów własności dielektrycznych lub
wielkości z nimi związanych.
5. Czujniki piezoelektryczne, używane do pomiarów
wielkości związanych ze zmianami geometrycznymi,
szczególnie wykorzystywane przy pomiarach drgań.

23
6. Czujniki
elektrochemiczne
(elektrolityczno-
galwaniczne,
elektrolityczno-oporowe,
elektrokinetyczne,
polarograficzne)
używane
do
pomiarów stopnia kwasowości, rożnych innych
właściwości chemicznych, pewnych wielkości
elektrycznych, mechanicznych itp.
7. Czujniki
fotoelektryczne,
mierzące
wszelkie
wielkości
związane
z
rożnego
rodzaju
promieniowaniem widzialnym lub niewidzialnym.
Pośrednio mogę one mierzyć inne wielkości, związane
przykładowo ze zmiany wymiarów.
8. Czujniki strunowe, pracujące na zasadzie zmiany
częstotliwości rezonansowej struny stalowej wraz z
naprężeniem. Stosowane są do pomiarów wszelkich
wielkości
związanych
ze
zmianami
wymiarów
geometrycznych.

24
9. Czujniki
ultradźwiękowe,
stosowane
do
pomiarów
prędkości
przepływu
cieczy,
w
defektoskopii ltd.
10.Inne (elektrodynamiczne, zbliżeniowe-prądów
wirowych,
laserowe),
wykorzystywane
w
badaniach specjalistycznych, bez szerszego jeszcze
opracowania literaturowego.

25
WZMACNIACZE spełniać muszą określone warunki,
do których zaliczyć można:
brak zniekształceń amplitudy, które powodowane
może być nieliniowością układu;
wzmocnienie w funkcji częstotliwości powinno być
możliwie stałe;
małe zniekształcenia fazowe i niewielkie zaburzenia
w stosunku do napięcia z przetwornika.
W praktyce stosuje się wiele typów wzmacniaczy,
różniących się między sobą dużą liczbą parametrów:
ciężarem, kształtem, poborem mocy, opornością
wejściową i wyjściową.

26
ZŁĄCZA POMIAROWE zapewniają połączenie
jednostek funkcjonalnych układu pomiarowego w trzy
podstawowe konfiguracje: gwiazdową, szynową i
pętlową. Najczęściej stosowane są konfiguracje
szynowe systemów pomiarowych, w których wszystkie
urządzenia są dołączone równolegle do wspólnej
magistrali.
PROCESORY SYGNAŁÓW (analogowe i cyfrowe)
służą do przetwarzania sygnałów i informacji w nich
zawartych według określonych algorytmów. Procesor
może to być jedno urządzenie (np. mierniki
temperatury, prądu, napięcia analizator, korelator itd.)
lub zespół tych urządzeń połączony z komputerem.
Zasada pracy procesorów może być analogowa,
cyfrowa lub hybrydowa.

27
UKŁADY WIZUALIZACJI I REJESTRACJI
służą do prezentacji
przetworzonych w procesorze wyników badań, które w ostatecznej
postaci mają charakter liczbowy lub funkcyjny. Do obserwacji i
rejestracji tych danych wykorzystywane są:
wskaźniki analogowe lub cyfrowe do odczytu danych
alfanumerycznych;
oscyloskopy zwykłe do obserwacji bieżących zmian procesu lub
jego estyma funkcyjnych;
oscyloskopy z pamięcią lub oscylografy pętlicowe do rejestracji
fotograficznej danych;
rejestratory poziomu do zapisu zmian estyma funkcyjnych i ich
ewolucji w nadzorowanym czasie eksploatacji;
rejestratory X—Y sterowane napięciem w obu kierunkach do
zapisu kształtu estyma;
monitory komputerów traktowane jako końcówki procesorów do
bieżącej prezentacji informacji alfanumerycznych, wykresów itp.;
drukarki i plotery jako środki utrwalania informacji z monitora;
pamięci cyfrowe jako środki rejestracji i bezpośredniej transmisji
do komputera.

28
2. Przetwarzanie informacji
Prowadzone eksperymenty diagnostyczne dają
informacje o zjawiskach zachodzących w badanym
obiekcie.
Sygnał
otrzymany
z
pomiarów
jest
przetwarzany najczęściej na wielkość elektryczną, która
przenosi pierwotne informacje pochodzące z badanego
obiektu. Na sygnał elektryczny mogą być przetwarzane
wszystkie wielkości charakteryzujące stan dynamiczny,
są one ciągłe w czasie i zawierają oprócz podstawowej
informacji o zmieniającym się stanie maszyny inne
informacje,
zbędne
dla
diagnozowania
(szum
informacyjny).

29
Ocena stanu dynamicznego maszyn za pomocą miar
i ocen sygnałów diagnostycznych zależy od zawartości
informacyjnej odbieranych sygnałów. Przy wyborze
sygnału mającego stanowić o danej własności maszyny
niezwykle istotne jest właściwe odtworzenie modelu
informacyjnego, umożliwiającego opis rozwijających się
uszkodzeń. Opis sygnału dokonywany jest za pomocą
zbioru jego cech (ocen), którymi mogą być liczby lub
funkcje. Działanie, w wyniku którego otrzymuje się
zbiór cech sygnału, nazywane jest analizą sygnału.
Wybór metod analizy oraz wybór cech sygnału w tej
analizie dokonany powinien być odpowiednio do celu
badań oraz odpowiednio do klasy sygnału, czyli z
uwzględnieniem ogólnych właściwości rozpatrywanego
zadania diagnostycznego.

30
Wybór procedury przetwarzania sygnału zależy od
rodzaju żądanych informacji, od klasy analizowanego
sygnału i od technicznych możliwości realizacji.
Sygnały charakteryzujące procesy wyjściowe z
maszyny, wykorzystywane w diagnostyce maszyn
można
podzielić
na
zdeterminowane
(deterministyczne) i losowe (stochastyczne).
Sygnał zdeterminowany można jednoznacznie opisać
za
pomocą
zależności
matematycznych,
nie
zawierających wielkości losowych. Można więc dokonać
jego opisu za pomocą funkcji (czasu, częstotliwości,
położenia)
o
wartościach
rzeczywistych
lub
zespolonych.
31
Większość sygnałów ma charakter losowy, ze
względu na kilka czynników, z których najważniejsze to:
obecność zakłóceń wnoszonych przez aparaturę,
losowość
obserwowanych
zjawisk
dynamicznych
maszyny, losowość zakłóceń zewnętrznych itd.
Sygnałowi losowemu, w celu jego opisu, należy
przyporządkować proces stochastyczny.
Porównanie
kilku
realizacji
uzyskanych
w
identycznych
warunkach
i
odpowiednim
czasie
umożliwia ustalenie, czy sygnał jest zdeterminowany
czy losowy.

32
W klasie sygnałów zdeterminowanych należy
wyróżnić sygnały okresowe i nieokresowe. Do
podstawowych
klas
sygnałów
zdeterminowanych,
stosowanych w diagnostyce, można zaliczyć:
sygnały harmoniczne, które w dziedzinie czasu
opisuje znana funkcja harmoniczna: x(t)=Acos(wt +
j), gdzie: A - amplituda, w=2pf, f- częstotliwość, t -
czas dynamiczny, j - faza początkowa. Podstawowymi
cechami liczbowymi sygnału harmonicznego są:
amplituda, częstotliwość i faza. W dziedzinie
amplitudy stosuje się takie oceny liczbowe, jak
wartość
średnia,
wartość
skuteczna,
wartość
szczytowa, wartość międzyszczytowa, a także cechy
bezwymiarowe, jak współczynnik szczytu, kształtu,
impulsowości i inne;

33
sygnały poliharmoniczne, które można opisać w
dziedzinie czasu za pomocą kombinacji liniowej
składowych
harmonicznych,
przy
czym
n-ta składowa jest wielokrotnością częstotliwości
podstawowej. Jeśli fazy początkowe nie są zmiennymi
losowymi, sygnały poliharmoniczne mogą być w
dziedzinie czasu opisane za pomocą zdeterminowanej
funkcji x(t), która może zostać rozwinięta (z nielicznymi
wyjątkami)
w
szereg
Fouriera.
W
dziedzinie
częstotliwości sygnał ten można opisać za pomocą
widma prążkowego;
zdeterminowane sygnały nieokresowe, do których
zaliczamy sygnały impulsowe lub o ograniczonym
czasie trwania. Ich istotną cechą jest możliwość opisu
za pomocą zdeterminowanych funkcji czasu. W
dziedzinie częstotliwości sygnały te nie mogą być
opisane w postaci dyskretnego widma prążkowego,
należy zastosować tu ciągłą funkcję gęstości widmowej.

34
Sygnały losowe określane są na zbiorze realizacji w
ograniczonym przedziale czasu. Zmierzony sygnał
losowy można uważać za odcinek jednej realizacji
procesu losowego, a wartości cech sygnału losowego
powinny być wyznaczane na podstawie analizy
wszystkich jego realizacji. Dlatego wprowadzono pojęcie
estymatora, tj. oceny wartości cechy zmiennej losowej,
dokonanej na podstawie analizy próby o ograniczonej
liczności wartości tej zmiennej.

35
Estymator powinien w szczególności być nieobciążony
i zgodny:
nieobciążony, gdy jego wartość oczekiwana jest
równa wartości ocenianej cechy;
zgodny, jeśli ze wzrostem liczności próby, z której
jest on wyznaczony, wartość estymatora dąży z
prawdopodobieństwem dążącym do jedności do
wartości ocenianej cechy.

36
W
zastosowaniu
diagnostycznym
często
wykorzystywane są sygnały losowe stacjonarne i
ergodyczne. Dla zastosowań praktycznych wystarczy
przyjąć, że sygnały stacjonarne to takie, których
uśrednione cechy nie są zmienne w czasie, mają więc
wartość średnią, stałą w czasie, a funkcja autokorelacji
jest
funkcją
tylko
przesunięcia
czasowego.
Ergodyczność sygnału losowego w praktyce oznacza
natomiast możliwość wyznaczenia wszystkich jego cech
probabilistycznych przy pomocy operatora uśredniania
w
wyniku
analizy
jednej
realizacji
sygnału
obserwowanego.

37
Statystyczny opis właściwości sygnałów losowych
prowadzi się przy wykorzystaniu różnych wielkości
(stosowanych
także
w
opisie
sygnałów
zdeterminowanych), z których przytoczono tu jedynie
najważniejsze: wartość średnia, wariancja, wartość
średniokwadratowa, funkcja autokorelacji, korelacji
wzajemnej, gęstość widmowa, widmo mocy, wzajemna
gęstość widmowa i funkcja koherencji zwyczajnej.

38
Teoria przetwarzania sygnałów obejmuje działania
zmierzające do wybrania ze zmierzonego sygnału
istotnych informacji o przebiegu badanego zjawiska.
Środki sprzętowe, występujące w przetwarzaniu
informacji diagnostycznej, są następujące:
— środki wstępnego przetwarzania informacji:
układy filtrujące,
przetworniki funkcyjne i ograniczniki dynamiki
sygnałów,
przetworniki analogowo-cyfrowe,
urządzenia kodujące;

39
— środki przesyłania informacji:
urządzenia nadawcze i odbiorcze,
linie transmisyjne i magistrale przesyłania danych,
urządzenia komutujące,
multipleksery i koncentratory,
urządzenia wzmacniające;
— środki przetwarzania informacji:
wyspecjalizowane analogowe lub cyfrowe urządzenia
liczące,
sterowane programowo komputery i mikrokomputery,
wieloprocesorowe systemy obliczeniowe.

40
Przetwarzanie sygnałów można podzielić na etapy:
przetwarzanie
wstępne:
filtrowanie
sygnału
analogowego,
przetwarzanie
analogowo-cyfrowe,
usuwanie
trendu,
klasyfikacja
sygnału,
testy:
stacjonarności, okresowości i normalności;
analiza
zasadnicza
w
dziedzinie
czasu,
częstotliwości i amplitud;
cechowanie
otrzymanej
estymaty
poprzez
obliczenie błędu średniokwadratowego, względnego
odchylenia standardowego i względnego odchylenia
skutecznego.

41
Wykorzystanie danych, zbieranych w nadmiarze w
eksperymencie i uzyskiwanych podczas przetwarzania, do
podjęcia decyzji o stanie maszyny często nie jest ani
możliwe ani konieczne. Naturalne jest więc dążenie do
redukcji danych początkowych, obejmujących zbiory
obiektów oraz opisujących je informacji, które winny
zostać zastąpione przez stosunkowo niewielkie zbiory
danych odpowiednio zagregowanych i uporządkowanych.
Najogólniej, redukcja danych może polegać na:
selekcji informacji, czyli redukcji liczby cech
opisujących obiekty;
zastąpieniu ciągłego zakresu zmienności wartości
cechy zmianami dyskretnymi, a niekiedy binarnymi;
zmniejszeniu
liczby
obiektów
reprezentujących
poszczególne klasy stanu.

42
Dla problemu selekcji informacji duże znaczenie mają
metody redukcji, które:
a) minimalizują ryzyko lub średnie prawdopodobieństwo
błędu klasyfikacji obiektu;
b) maksymalizują, przyjętą funkcję celu;
c) maksymalizują
(z
ograniczeniem)
wskaźniki
informatywności cech.
Optymalne metody redukcji (a) minimalizują średnie
ryzyko lub średnie prawdopodobieństwo błędu klasyfikacji
stanu obiektu. Praktycznie, znaczenie tych metod może
być
znacznie
ograniczone
wskutek
nieznajomości
rozkładów prawdopodobieństwa. W takiej sytuacji muszą
być znane a priori co najmniej przykłady obserwacji z
poszczególnych klas. Odpowiednie metody mogą wówczas
polegać na znajdowaniu podzbiorów cech, które
ekstremalizują przyjęte kryteria (funkcje celu, wskaźniki).

43
Rodzaje redukcji danych (b) oraz (c) wchodzą w
zakres
metod
stosowanych
w
statystyce
matematycznej i metod próbkowania i kwantyzacji
sygnałów, mających na celu przystosowanie postaci
sygnału do wymagań związanych z przetwarzaniem
informacji.
Spodziewanym efektem redukcji danych dla przyjętej
jakości klasyfikacji stanu jest uproszczenie struktury
zbioru danych, uproszczenie algorytmu klasyfikacji,
skrócenie czasu obliczeń, zwiększenie szybkości pracy
systemu, zmniejszenie kosztów realizacji technicznej.
Metodyka postępowania podczas przetwarzania
informacji w całym zadaniu diagnostycznym, od
sformułowania zadania do końcowej procedury badań,
przedstawiona została na rysunku 6.
44
45
W zakresie redukcji informacji istotne są wyróżnione
bloki wyboru cech stanu obiektu oraz wyboru miar
sygnału diagnostycznego, decydujące o rodzaju i
dobroci modelu diagnostycznego, w oparciu o który
formułowane są diagnozy o stanie obiektu. Z blokiem
selekcji miar sygnału związany jest blok wyboru
punktów odbioru sygnału diagnostycznego, często
znaczący w doborze symptomów stanu, szczególnie w
wibrodiagnostyce maszyn. Przykładowo dalej pokazano
jedną
z
możliwości
przetwarzania
informacji
diagnostycznej wraz z redukcją nadmiaru informacji w
zakresie:
̶̶ wyboru punktów odbioru sygnału;
̶̶ wyboru symptomów stanu;
̶̶ wyboru cech stanu obiektu.

46
WYBÓR PUNKTÓW ODBIORU SYGNAŁU
Teoretyczne przesłanki prowadzenia badań w
obecności zakłóceń uzasadniają wagę właściwego
wyboru punktów pomiarowych. Mając na uwadze
wczesne wykrycie rozwijającego się uszkodzenia należy
zminimalizować wpływ odległości r od miejsca
powstawania symptomu, tzn. mierzyć tak blisko
potencjalnego miejsca uszkodzenia jak tylko jest to
możliwe. Są dwa powody takiego podejścia.

47
Po pierwsze tworzywo konstrukcyjne cechuje się
zawsze pewnym tłumieniem energii dyssypowanej przez
uszkodzenie, rosnącym dla wyższych wartości częstości.
Stąd też mierząc blisko miejsca tworzenia się sygnału
maksymalizuje się jego amplitudę i tym samym
poprawia się korzy stnie stosunek sygnału do szumu.
Drugi powód to własności rezonansowe konstrukcji
obiektu, gdzie w różnych miejscach selektywnie
dominują różne składowe widma wymuszeń od obciążeń,
zakłóceń
czy
też
rozwijających
się
uszkodzeń
(wielorezonansowa transmitancja).

48
Stąd też, oprócz bliskości potencjalnego uszkodzenia,
miejsce pomiaru i jego kierunek muszą charakteryzować
się dużą dynamiką amplitudy i małymi zniekształceniami
selektywnymi na drodze: uszkodzenie—miejsce odbioru.
W praktycznych zastosowaniach diagnostyki miejsce
odbioru sygnałów ustalane jest w oparciu o znajomość
modelu funkcjonalnego obiektu i jego modeli generacji
sygnałów.
Nie
zawsze
jednak
wyselekcjonowana
strefa
powstawania uszkodzeń jest dostępna pomiarowo (np.
zazębianie kół, palisada łopatek, węzeł łożyska
wewnętrznego itd.), co determinuje konieczność
stosowania miar analitycznych w wyborze tych punktów.
Zadanie to można wykonać stosując jedną z miar
podobieństwa procesów generowanych w różnych
punktach maszyny, ukazujących lokalny stopień
podobieństwa między tymi procesami.
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
- Slide 44
- Slide 45
- Slide 46
- Slide 47
- Slide 48
Wyszukiwarka
Podobne podstrony:
Prezentacja LSD W 04
Prezentacja LSD W 02
Prezentacja LSD W 01
Prezentacja LSD W 03
prezentacja finanse ludnosci
prezentacja mikro Kubska 2
Religia Mezopotamii prezentacja
Prezentacja konsument ostateczna
Strategie marketingowe prezentacje wykład
motumbo www prezentacje org
lab5 prezentacja
Prezentacja 18
Materialy pomocnicze prezentacja maturalna
Prezentacja na seminarium
Lato prezentacja 3
Prezentacja1
więcej podobnych podstron