
"Stworzenie Sztucznej Inteligencji
było marzeniem ludzkości od chwili
narodzin nauki"
Cytat z filmu "A.I."

INTELIGENCI
I
Wykład 15h
Dr hab. inż. Roman Stryczek
METODY
SZTUCZN
EJ

tematyka
• 1,2 – Definicja AI, przesłanki rozwoju, obszary zastosowania
• 3, – logika klasyczna, logika i zbiory rozmyte, wnioskowanie
rozmyte
• 4 – klasyczne języki sztucznej inteligencji PROLOG, LISP
• 5 – drzewa decyzyjne, wnioskowanie heurystyczne
• 6,7 – rozpoznawanie obrazów,
• 8, 9 - systemy uczące się, sieci neuronowe
• 10, 11 – techniki ewolucyjne (AG, PSO)
• 12– systemy hybrydowe
• 13 – sztuczne życie, automaty komórkowe
• 14 – inteligentne systemy wytwarzania
• Literatura:
•
• L. Rutkowski: Metody i Techniki Sztucznej Inteligencji.
PWN, 2005.
• M.J. Kasperski: Sztuczna inteligencja. Helion 2003.
• J. Chromiec, E. Strzemieczna: Sztuczna inteligencja.
Metody konstrukcji i analizy systemów eksperckich.
Akademicka Oficyna Wydawnicza. Warszawa 1994.
• Jan Mulawka: Systemy ekspertowe. WNT Warszawa
1996.
• E. Chwiałkowska: Sztuczna inteligencja w systemach
eksperckich. Zakład nauczania Informatyki „MIKOM”,
Warszawa 1991. Highfield: Granice złożoności.
Prószyński i S-ka, W-wa 1997.

•
L. Bolc, W. Borodziewicz, M. Wójcik: Podstawy przetwarzania informacji
niepewnej i niepełnej. PWN, Warszawa 1991.
•
W.M. Nazaretow, D.P. Kim T. Krupa: Techniczna imitacja intelektu. ESP/6,
WNT, Warszawa 1991.
•
C. Iwański, G. Szkatuła: Wybrane metody uczenia maszynowego dla
tworzenia reguł klasyfikacji obiektów.Instytut Badań Systemowych, Warszawa
1992.
•
R. Tadeusiewicz: Sieci neuronowe. Akademicka Oficyna Wydawnicza,
W-wa 93. http://winntbg.bg.agh.edu.pl/skrypty/0001/main.html
•
R. Tadeusiewicz – systemy wizyjne robotów przemysłowych. WNT, W-wa 92.
•
Paweł. Cichosz: Systemy uczące się. WNT, W-wa 2000.
•
R.Tadeusiewicz, P.Korohoda: Komputerowa analiza i przetwarzanie
obrazów .WFPT, Kraków 97.
•
R.Tadeusiewicz, M. Faliński: Rozpoznawanie obrazów,
http://winntbg.bg.agh.edu.pl/skrypty/5/
•
Korbicz, Kościelny, Kowalczuk, Cholewa: Diagnostyka Procesów, Modele,
Metody sztucznej inteligencji, zastosowania, WNT 2002.
•
Antoni Niederliński: Regułowe systemy ekspertowe.
•
Peter Coveney, Roger
•
•
http://sound.eti.pg.gda.pl/rekonstrukcja/sztuczna_inteligencja.
html
•
•
http://gimnr1olkusz.republika.pl/ai.htm
•
http://www.zasada.ps.pl/Ai.html
•
http://republika.pl/edward_ch/
•
http://www.phys.uni.torun.pl/~duch/neural.html
•
http://cgm.cs.mcgill.ca/~godfried/teaching/pr-
web.html#nearest
•
http://wombat.ict.pwr.wroc.pl/nauczanie/prezentacja/flash/ag/in
tro.swf
•
http://panda.bg.univ.gda.pl/~sielim/genetic/
•
http://www.visual-prolog.com

DEFINICJE
•
.
•
•
Inteligencja:
•
•
(filozoficzna) zdolność umysłu do efektywnego ujmowania - dzięki
posługiwaniu się pamięcią, wyobraźnią, świadomością i
podświadomością, intuicją, abstrakcją i przeżywaniem stanów
emocjonalnych - zagadnień zarówno praktycznych jak i teoretycznych;
•
•
(wg słownika Webstera) zdolność uczenia się i rozumienia zjawisk
poprzez doświadczenie, zdolność zdobywania wiedzy i wykorzystania
jej w celu szybkiego i efektywnego reagowania na nowe sytuacje;
zdolność rozumowania w celu efektywnego rozwiązywania
problemów.
(wg słownika Webstera)
zdolność uczenia się i rozumienia zjawisk poprzez
doświadczenie, zdolność zdobywania wiedzy i
wykorzystania jej w celu szybkiego i efektywnego
reagowania na nowe sytuacje; zdolność rozumowania
w celu efektywnego rozwiązywania problemów.
(wg słownika Webstera)
zdolność uczenia się i rozumienia zjawisk poprzez
doświadczenie, zdolność zdobywania wiedzy i
wykorzystania jej w celu szybkiego i efektywnego
reagowania na nowe sytuacje; zdolność rozumowania
w celu efektywnego rozwiązywania problemów.
Definicje
Inżynieria wiedzy
- systemy związane z pozyskiwaniem, gromadzeniem i
przetwarzaniem wiedzy
(filozoficzna)
zdolność umysłu do efektywnego ujmowania - dzięki
posługiwaniu
się
pamięcią,
wyobraźnią,
świadomością
i
podświadomością,
intuicją,
abstrakcją i przeżywaniem stanów emocjonalnych -
zagadnień zarówno praktycznych jak i teoretycznych;
Inteligencja: zdolności umysłowe człowieka
(Cyceron);
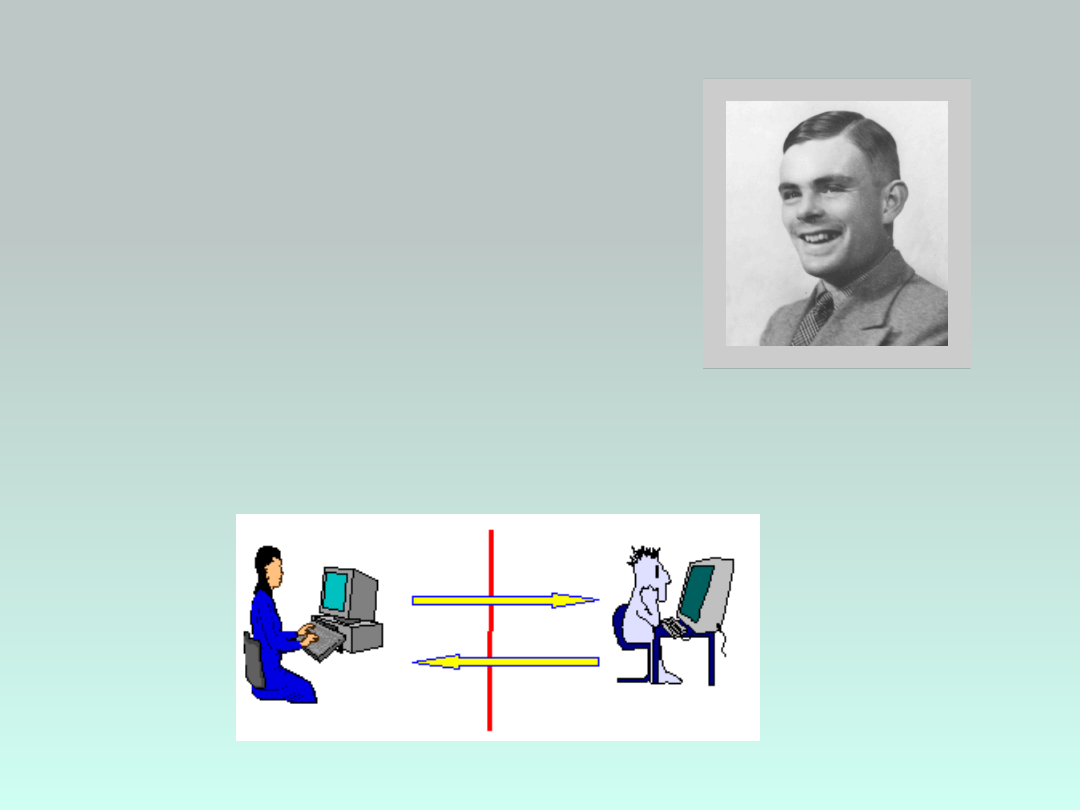
Test Turinga
(1950)
Alan Turing (1912-
1954)
- Sposób określania zdolności
maszyny do posługiwania się
językiem naturalnym i
pośrednio mającym dowodzić
opanowania przez nią
umiejętności myślenia w
sposób podobny do ludzkiego
definicje sztucznej
inteligencji
Nauka o maszynach realizujących
zadania,
które
wymagają
inteligencji
wówczas,
gdy
są
wykonywane przez człowieka (M.
Minsky) .
Dziedzina informatyki dotycząca
metod i technik wnioskowania
symbolicznego przez komputer
oraz symbolicznej reprezentacji
wiedzy
stosowanej
podczas
takiego
wnioskowania
(E.
Feigenbaum).
Jest to interdyscyplinarna dziedzina nauki,
zajmująca
się
metodami
wyciągania
zadowalających pod względem poprawności
wniosków na podstawie niepełnej i niepewnej
informacji oraz nieugruntowanej wiedzy.
[R.S.]
Logika
rozmyta
Logika
rozmyta
AI
AI
Psychologia
Psychologia
Matematyka
Matematyka
Neurofizjologi
a
Neurofizjologi
a
Lingwistyka
Lingwistyka
Filozofia
Filozofia
Informatyk
a
Informatyk
a
Elektronika
Elektronika
Antropologi
a
Antropologi
a
Robotyka
Robotyka
Systemy
ekspertowe
Systemy
ekspertowe
Systemy wizyjne
Systemy wizyjne
Procesy
percepcji
Procesy
percepcji
Przetwarzania
języka
Przetwarzania
języka
CI
CI
Rozpoznawanie
obrazów
Rozpoznawanie
obrazów
Algorytmy
ewolucyjne
Algorytmy
ewolucyjne
EP
EP
Sieci neuronowe
Sieci neuronowe
Wnioskowanie
heurystyczne
Wnioskowanie
heurystyczne
Teoria gier
Teoria gier
Automaty komórkowe
Automaty komórkowe
Techniki
ewolucyjne
Techniki
ewolucyjne
Inteligencj
a Roju
Inteligencj
a Roju
ES
ES
GP
GP
AG
AG
ACO
ACO
PS
O
PS
O

Pod-dziedziny sztucznej inteligencji:
• rozwiązywanie problemów i strategie przeszukiwań;
• teoria gier;
• rozumowanie logiczne, automatyczne dowodzenie
twierdzeń;
• systemy ekspertowe;
• robotyka (inteligentne połączenie pomiędzy percepcją a
akcją);
• procesy percepcji (wizja, słuch, dotyk, mowa);
• uczenie się maszyn;
• wyszukiwanie informacji (inteligentne bazy danych);
• programowanie automatyczne;
• analiza scen;
• specjalistyczne stacje robocze;
• systemy hybrydowe (połączenie tradycyjnych systemów
ekspertowych, systemów uczących się, sztucznych sieci
neuronowych oraz algorytmów ewolucyjnych
• Itp.
Najważniejsze osiągnięcia w
rozwoju AI
- lata przed II wojną światową (prehistoria):
•
logika formalna
•
psychologia poznawcza
•
1945 ENIAC (Electronic Numerical Integrator and Computer) – 333
mnożeń na minutę (17 468 lamp, 70000 oporników, 10 000
kondensatorów, 1500 przekaźników i 6000 przełączników) – waga 30
ton
- lata powojenne (1945-1954)
•
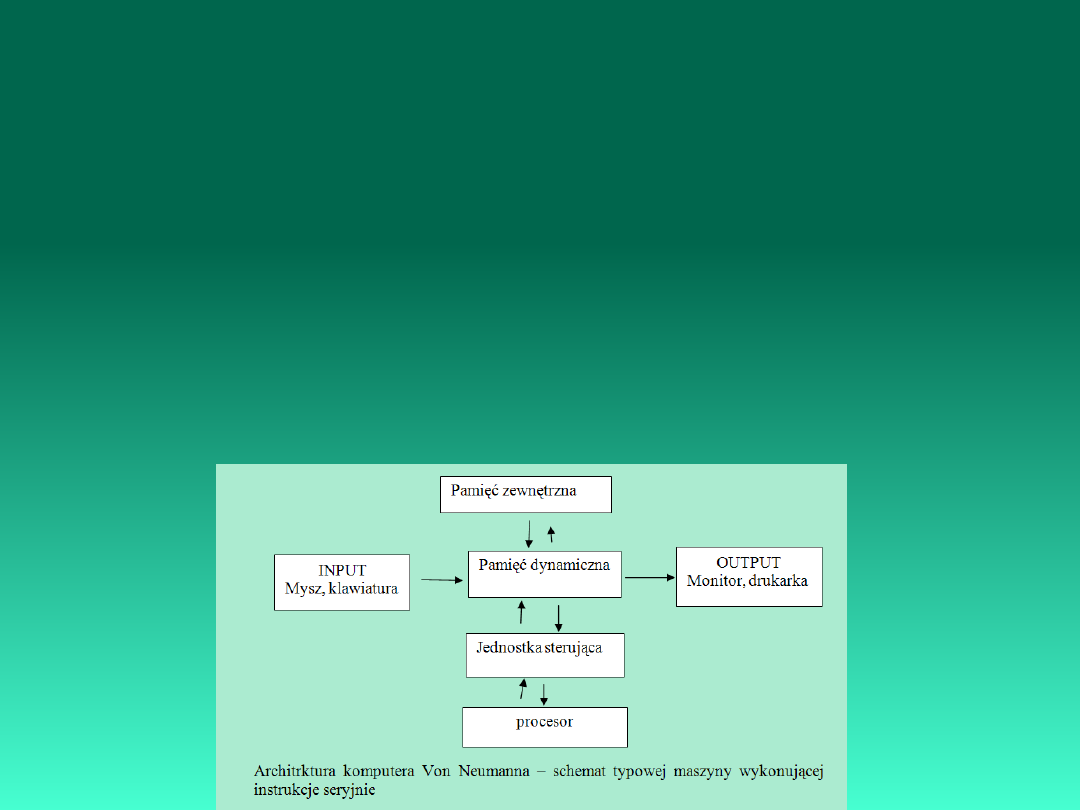
John von Neumann (1908-1958) (prace na bombą jądrową
(przebiegiem implozji), pionierskie metody numerycznego
rozwiązywania równań hydrodynamicznych, szeregowa architektura
komputera) – pierwszy EDVAC (52 rok)

Najważniejsze osiągnięcia w
rozwoju AI
•
Alan Turing (1912 –1954) (metody krypto-analityczne - Enigma,
uniwersalna maszyna Turinga, abstrakcyjna maszyna potrafiąca
wykonać dowolny algorytm – teoretyczny schemat komputera)
(projekt ACE – Automatic Computing Engin)
•
1948 powstanie MARK1 (Menchester) – pierwszy programowalny
komputer cyfrowy
•
Stanisław Ulam (automaty komórkowe)
•
- powstanie komputerów
•
- rozwój cybernetyki
- 1955-1960: (średniowiecze)
•
- rozpoczęcie badań nad sztuczną inteligencją
•
- rozwój komputerów
•
- LISP
•
sformułowanie programu ogólnego rozwiązywania problemów
(General Problem Solver)
•
PERCEPTRON (Frank Rosenblatt)

Najważniejsze osiągnięcia w
rozwoju AI
- 1961-1970: (wiek rozumowania)
•
GOFAI
•
heurystyki (prace Newell’a i Simon’a nad przeszukiwaniem
przestrzeni rozwiązań)
•
robotyka
•
1965 DENDRAL (Uniwersytet Stanford -Edward Feigenbaum) –
określał strukturę cząsteczki na podstawie na podstawie odczytu
spektografu masowego, zrealizowany w LISP’ie;
•
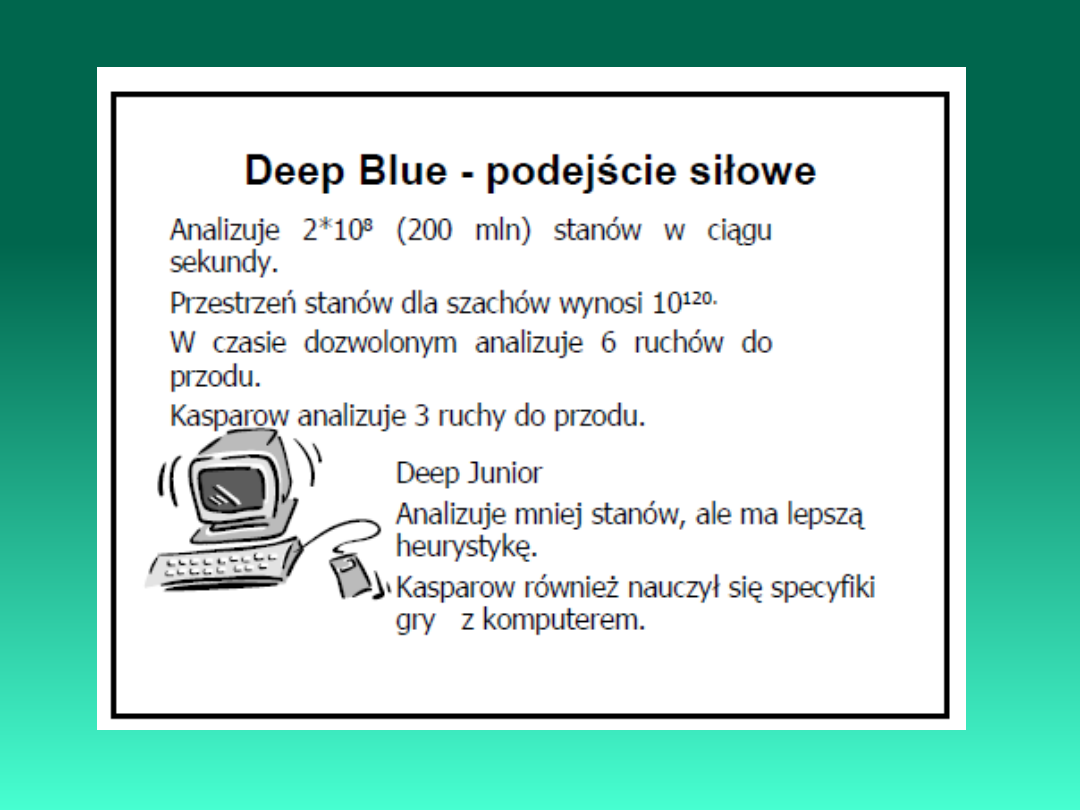
programy do gry w szachy
•
logika rozmyta (Lotfi Zadeh 1965)
- 1971-1980: (okres romantyczny)
•
porażka GOFAI (Piotr zobaczył komputer na wystawie sklepu i chce
go kupić)
•
systemy oparte na bazach wiedzy
•
MYCIN, EMYCIN
•
MYCIN - system interacyjny, diagnozujący infekcje bakteryjne i
polecający stosowną terapię antybiotykową. Umiejętnie i proawidłowo
stawia diagnozy w przypadku gdy brak jest kompletnych czy pewnych
danych. System ten jest uznawany za pierwszy i jak dotąd
najpopularniejszy system ekspertowy. Został zaprojektowany przez
Edwarda Shortlife'a z Uniwersytetu Stanforda w połowie lat 70-tych.
•
Prolog(72)
•
John Holland algorytmy genetyczne(75)

Najważniejsze osiągnięcia w
rozwoju AI
- po 1981-1985:
•
PROSPECTOR
•
nie zrealizowany japoński projekt komputera 5 generacji
- 1986-1990: (okres oświecenia)
•
rozwój sieci neuronowych
•
rozwój algorytmów genetycznych
- lata 90/XX w.
•
pojawienie się pierwszych inteligentnych urządzeń powszechnego
użytku
•
pojawienie się systemów hybrydowych
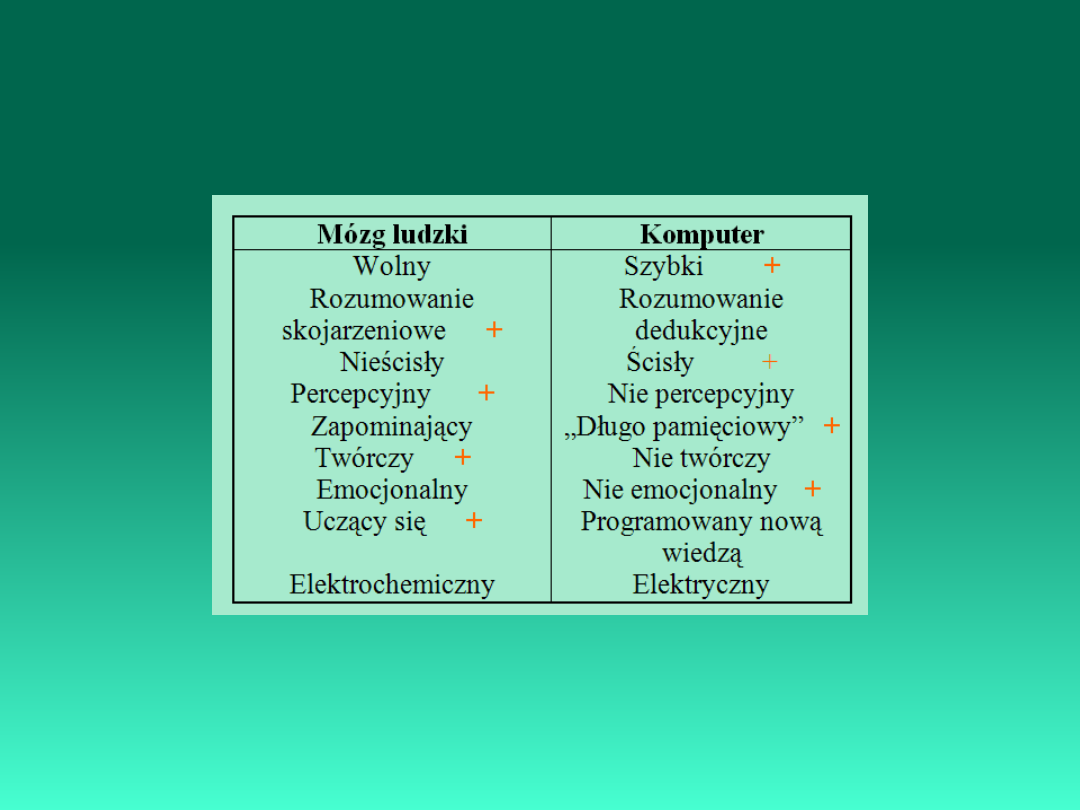
Porównanie mózgu ludzkiego i
komputera.
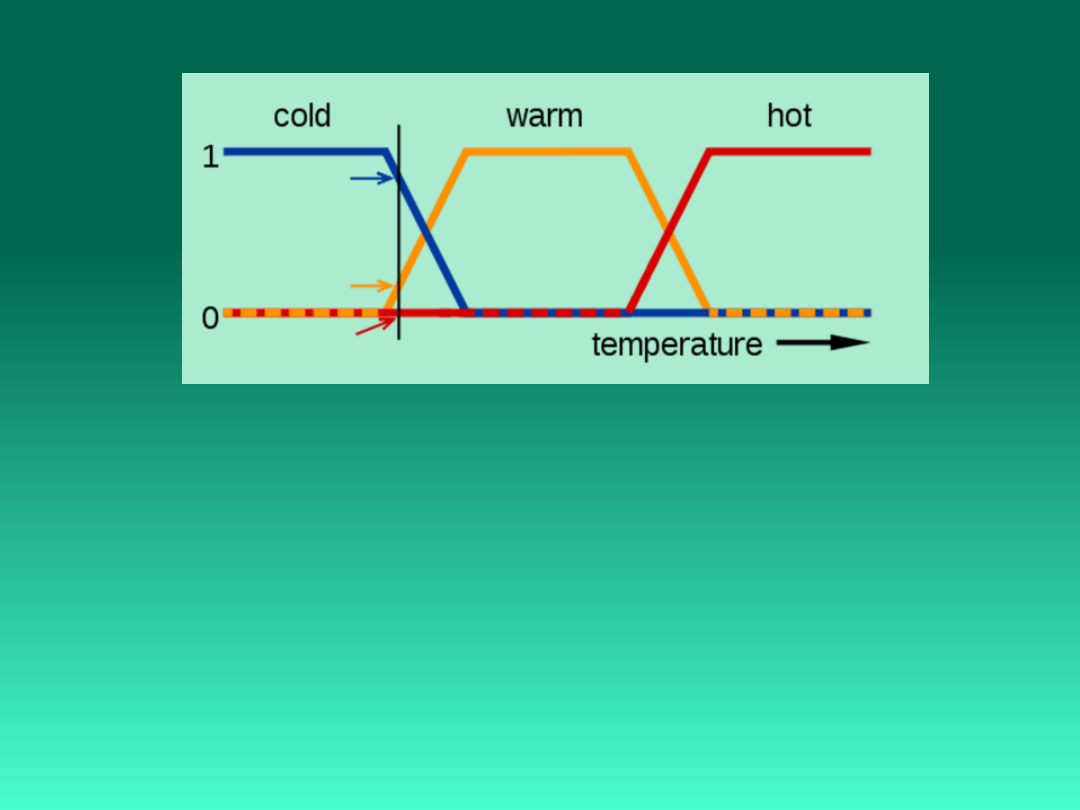
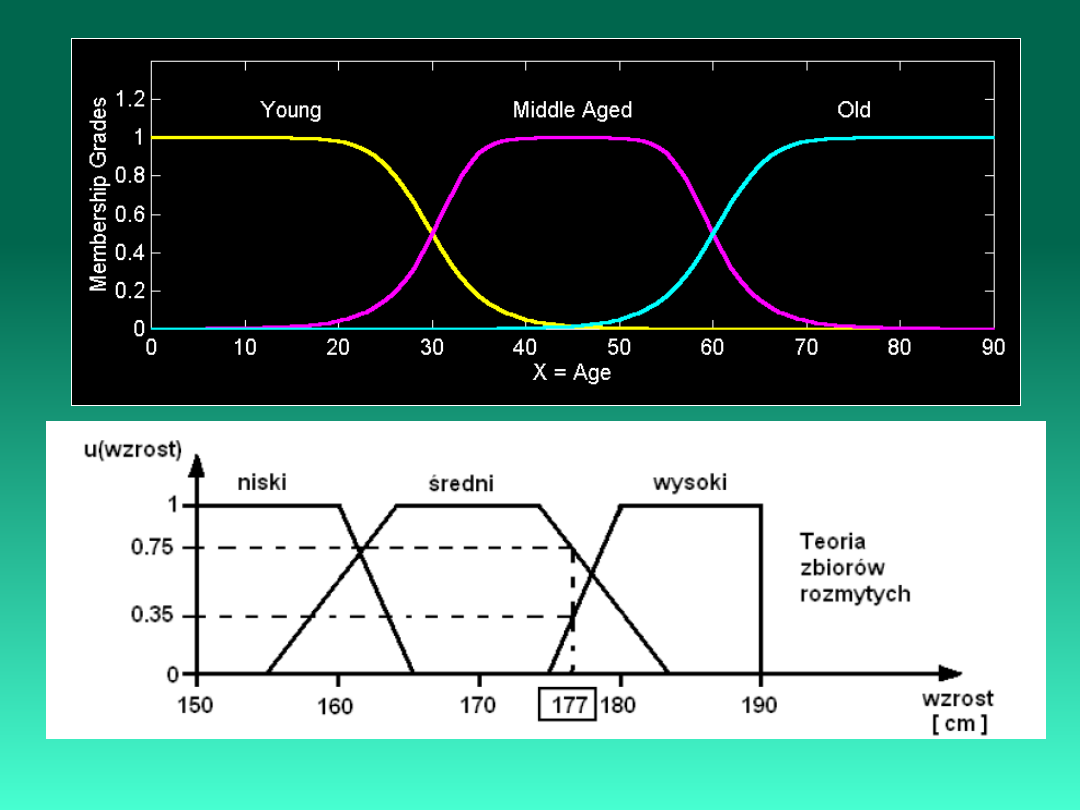
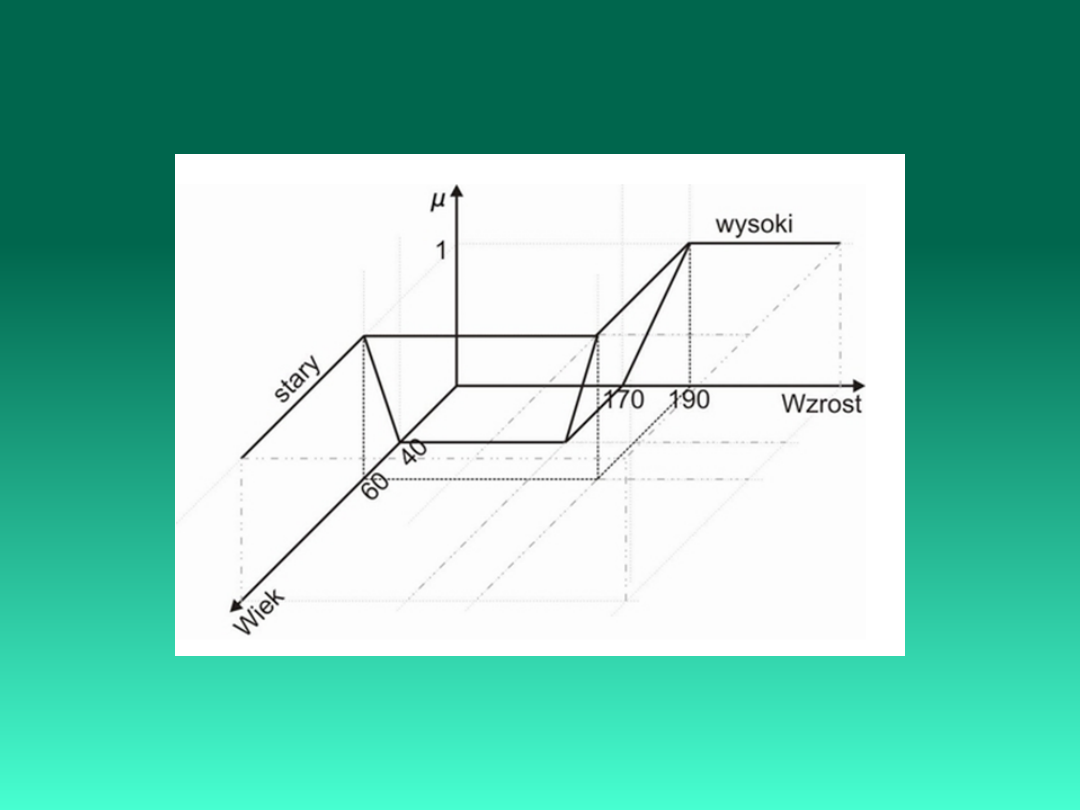
Zbiory rozmyte (Logika
rozmyta)
• W praktyce większość przypadków podejmowania decyzji
w procesie planowania lub zarządzania odbywa się w
warunkach pewnej nieokreśloności. Nieokreśloność
uwarunkowaną czynnikami przypadkowymi nazywamy
nieokreślonością losową lub stochastyczną. W celu
podejmowania decyzji w warunkach nieokreśloności
stochastycznej wykorzystywana jest teoria
prawdopodobieństwa.
• Innym typem nieokreśloności jest nieokreśloność
spowodowana niedokładnością (rozmytością,
nieostrością) celu i/lub ograniczeń. Do tego typu
nieokreśloności zaliczmy także niedokładność
lingwistyczną.
W celu formalizacji zadań podejmowania decyzji z
niedokładnym celem i/lub niedokładnym ograniczeniem lub
też w celu zbudowania modelu matematycznego systemów,
w którym istnieje lingwistyczna nieokreśloność –
opracowano teorię zbiorów rozmytych.
Lotfi A. Zadeh
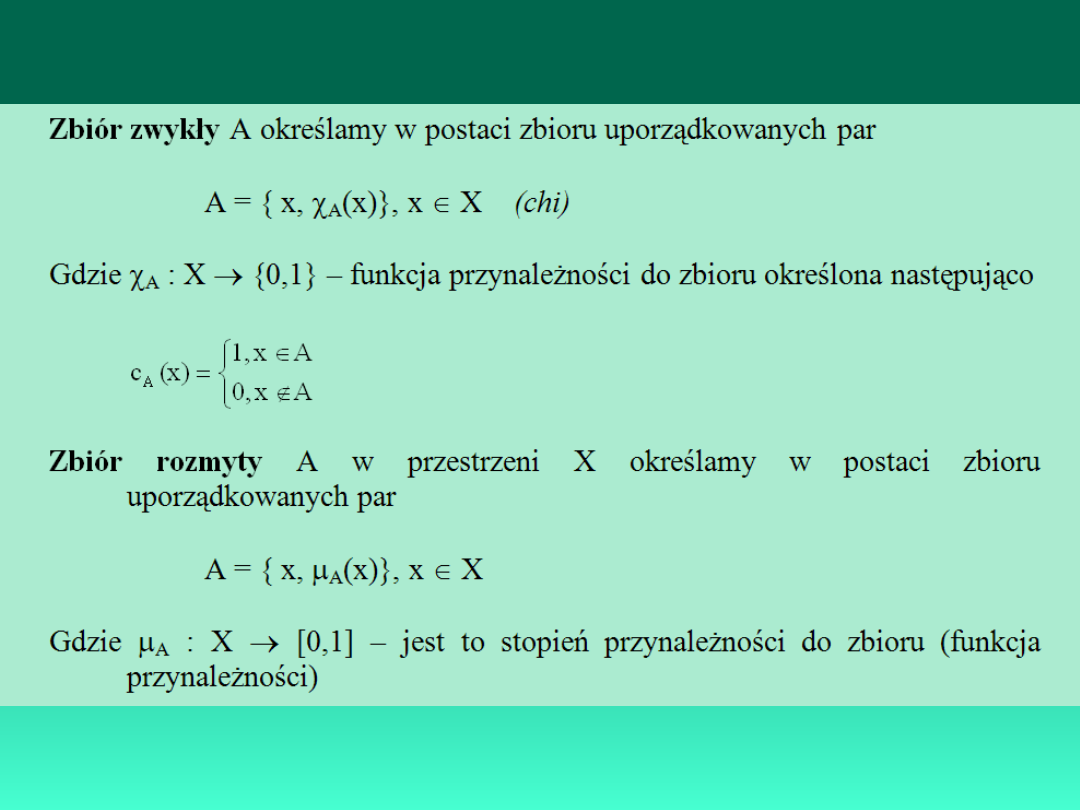
Funkcje Przynależności
(x)
Singleton: (a,1) i (b,0.5)
x
1
0
a
b
(x)
x
1
0
a b
c
Trójkątna: <a,b,c>
(
)
; , ,
max min
,
,0
x a c x
T x a b c
b a c b
�
-
-
�
�
�
=
�
�
�
�
-
-
�
�
�
�
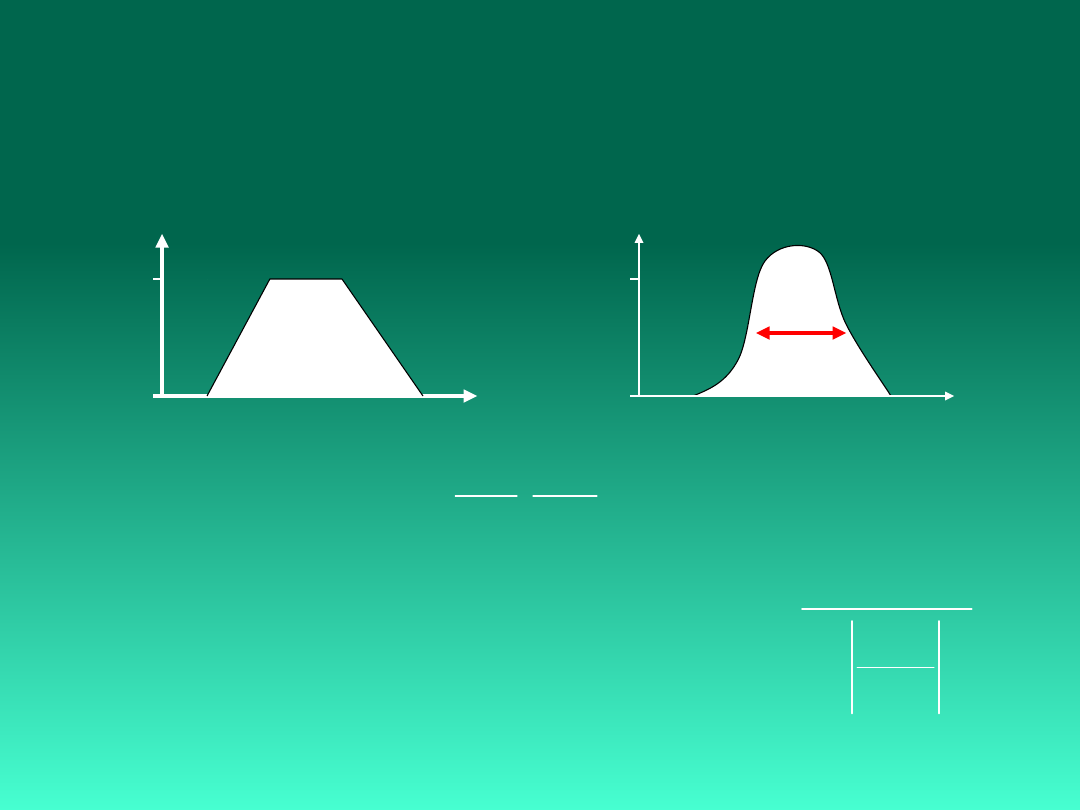
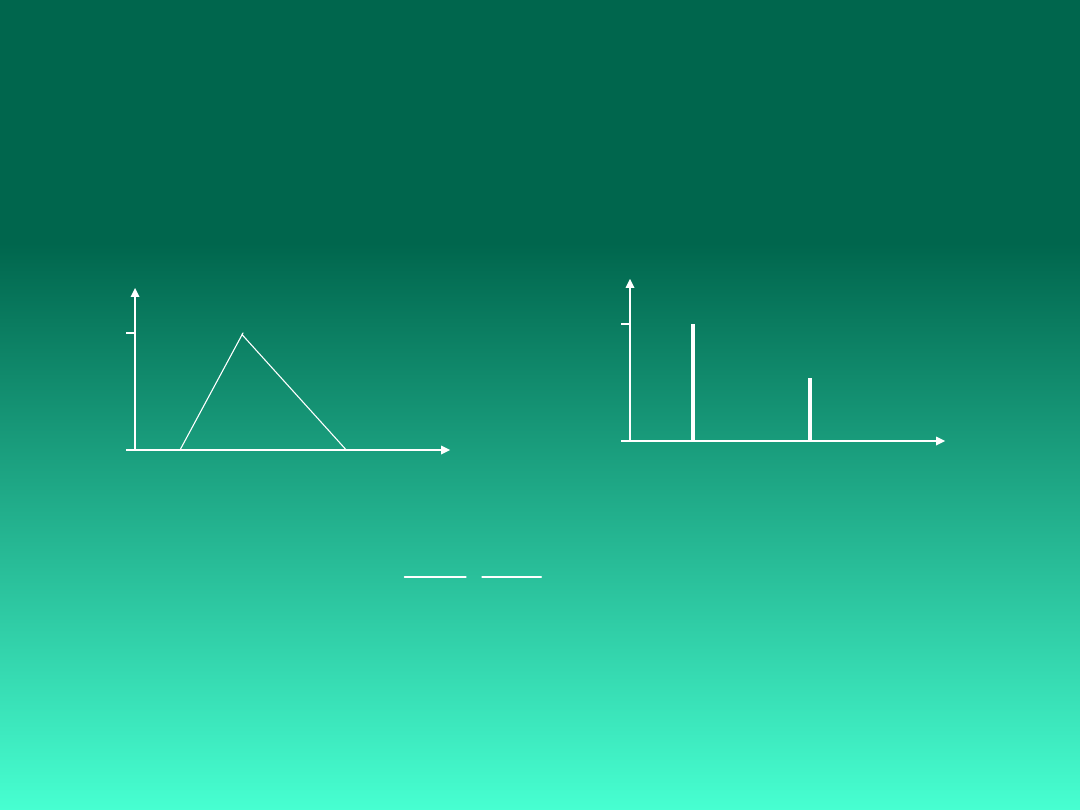
Typy Funkcji
Przynależności
x
(x)
1
0
a b
c
d
Trapezoid: <a,b,c,d>
x
(x)
1
0
Gaus/Bell: N(m,s)
c
s
(
)
; , , ,
max min
,
,1 ,0
x a d x
Trap x a b c d
b a d c
�
-
-
�
�
�
=
�
�
�
�
-
-
�
�
�
�
(
)
(
)
2
2
/2
;
x a
G x a
e
s
-
-
=
(
)
2
1
; ,
1
b
B x a b
x a
b
=
-
+
Przykłady rozmytych
relacji
X = { deszczowo, pochmurnie, słonecznie }
Y = { opalanie, wrotki, kamping, lektura }
deszczowo
pochmurni
e
słonecznie
X/Y opalanie wrotki kamping
lektura
0.0
0.2
0.0
1.0
0.0
0.8
0.3
0.3
1.0
0.2
0.7
0.0

Reguły rozmyte
Wiedzę potoczną można często zapisać w
naturalny sposób za pomocą reguł rozmytych.
Jeśli zm. lingw-1 = term-1 i zm. lingw-2 = term-
2
to zm. lingw-3 = term-3
Jeśli Temperatura = zimno i cena ogrzewania
= niska
to ogrzewanie = mocno
Operacje na liczbach
rozmytych
Operacje na liczbach
rozmytych
Dodawanie:
A+B
(x) = max{
A
(y),
B
(z) | x = y+z}
x
(x)
1
0
A
(y)
B
(z)
A+B
(x)
Iloczyn:
AB
(x) = min{
A
(y),
B
(z) | x = y
z}
x
(x)
1
0
A
(y)
B
(z)
AB
(x)

Zastosowania logiki
rozmytej
Inteligentne bazy wiedzy.
Wszędzie tam, gdzie trudno jest utworzyć
matematyczny model ale daje się opisać sytuację
w sposób jakościowy, za pomocą reguł
rozmytych.
Kontrolery rozmyte: ABS, aut. wycieraczki
„Inteligentne” lodówki, pralki, opiekacze do
grzanek, aparaty fotograficzne.
Tam gdzie nieprecyzyjny język daje się przełożyć
na reguły rozmyte.
Wiele zastosowań przemysłowych, głównie
dotyczących kontroli procesów.
Narzędzia AI
Języki AI
Języki AI
Development tools
Development tools
LISP
LISP
PROLOG
PROLOG
EMYCIN (Van Melle et al., 1979)
EMYCIN (Van Melle et al., 1979)
KEE
KEE
KES
KES
Knowledge Craft
Knowledge Craft
Personal Consultant
Personal Consultant
M1
M1

Prolog
(od
francuskiego
Programmation
en
Logique) jest to jeden z najpopularniejszych języków
programowania logicznego. Prolog jest językiem
ogólnego
zastosowania,
szczególnie
dobrze
sprawdzającym się w programach związanych ze
sztuczną inteligencją. Prolog w przeciwieństwie do
większości
popularnych
języków
jest
językiem
deklaratywnym.
Program w Prologu składa się z faktów oraz reguł
wnioskowania. Aby go uruchomić należy wprowadzić
odpowiednie zapytanie.
Prolog został stworzcony w 1971 roku przez
Prolog opiera się o rachunek predykatowy, jednak
ogranicza się tylko do
. Istnieją jednak
wbudowane predykaty wyższego rzędu.
Przykład :
Predicates
n_silnia(Integer,Real)
Clauses
n_silnia(0,1):-!.
n_silnia(N,W):-n_silnia(N-1,W0), W=N*W0.
Goal
n_silnia(10,W),write(W).
LISP
(ang. List Processing) –
język programowania
wysokiego poziomu przeznaczony do przetwarzaniu typu lista. Lisp
został wymyślony przez
pobytu na
. Stosowany jest do analizy tekstów, obliczeń
symbolicznych
(nienumerycznych)
i
logicznych,
sztucznej
inteligencji.
Podstawową strukturą danych w Lispie jest lista;
Kod źródłowy programów w Lispie składa się z list.
; marszruta
(command "_color" "_red")
(setq lista (open "c:\\CAPP\\lista" "r"))
(setq blok (read-line lista))
(setq x0 (atof (substr blok 1 10)))
(setq y0 (atof (substr blok 11)))
(while (/= blok nil)
(progn
(setq blok (read-line lista))
(setq x (atof (substr blok 1 10)))
(setq y (atof (substr blok 11)))
(command "_line" (list x0 y0) (list x y) "")
(setq x0 x y0 y)
)
)
(close lista)

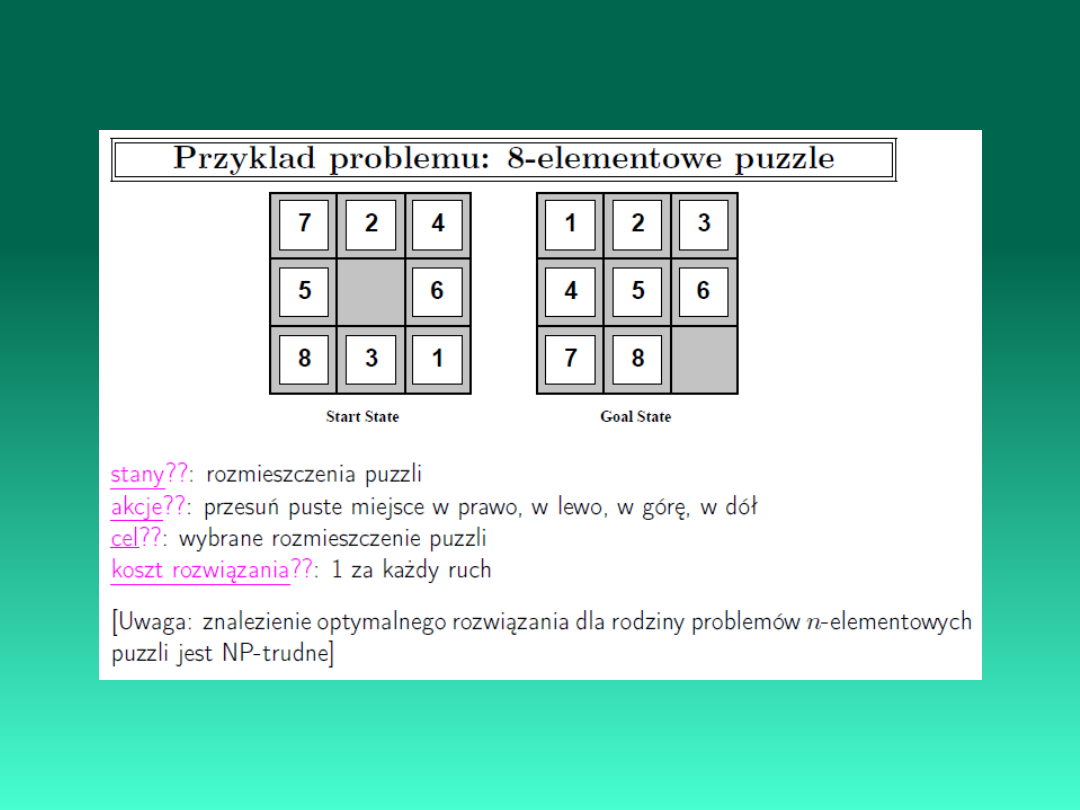
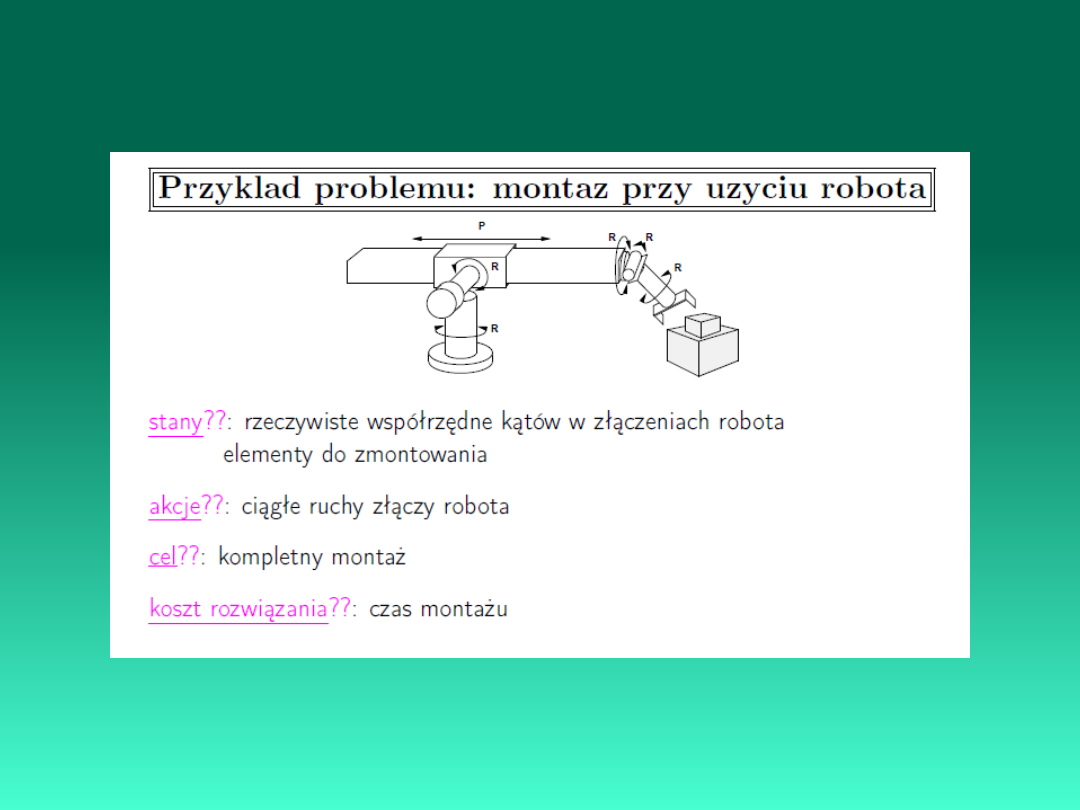
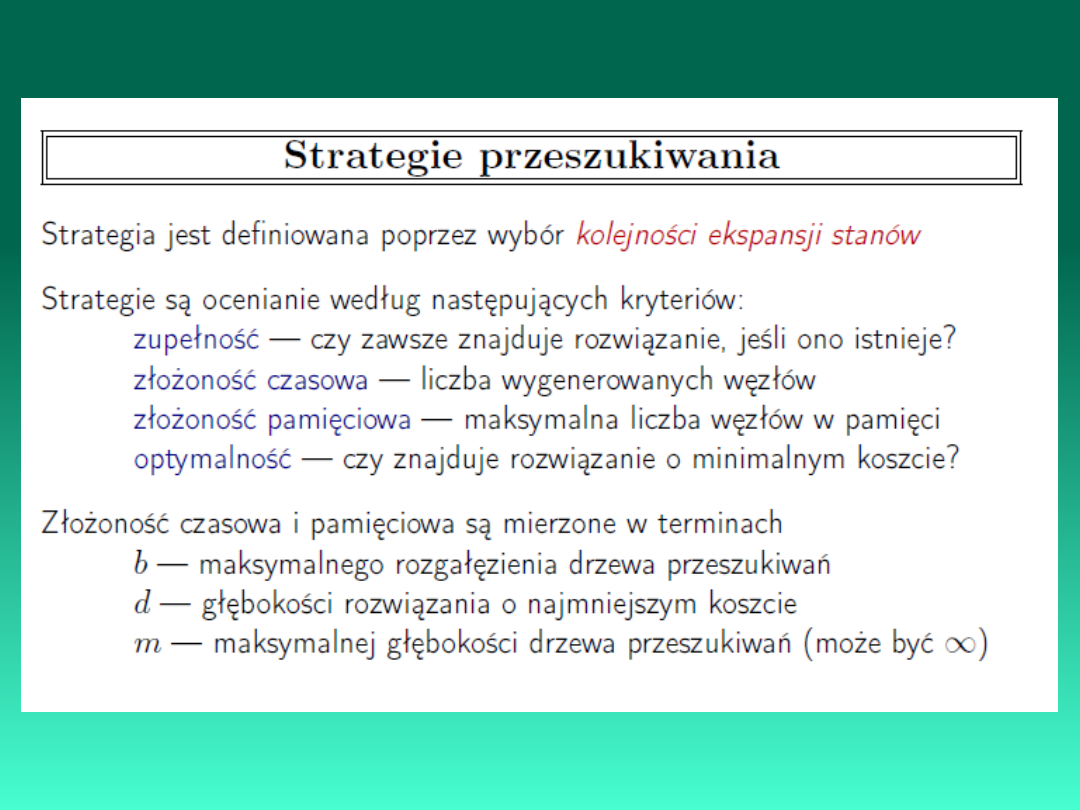
Rozwiązywanie zadań - poprzez analizę
przestrzeni stanów
Praca Feigenbauma i Feldmana opublikowana w 1963
roku. wprowadza pojęcie przeszukiwanie przestrzeni
stanów (ang. state space search).
Reprezentacja problemu:
stany
: reprezentują opisy różnych stanów świata
rzeczywistego
akcje
: reprezentują działania zmieniające bieżący stan
koszt akcji
( 0): reprezentuje koszt związany z
wykonaniem akcji
Sformułowanie problemu
stan początkowy
: początkowy stan przed
rozwiązaniem problemu
cel:
stan docelowy lub formuła oceniająca, czy dany
stan spełnia cel
rozwiązanie
: ciąg akcji prowadzący od stanu
początkowego do celu
koszt rozwiązania: funkcja oceny kosztu rozwiązania
równa sumie
kosztów poszczególnych akcji występujących w
rozwiązaniu
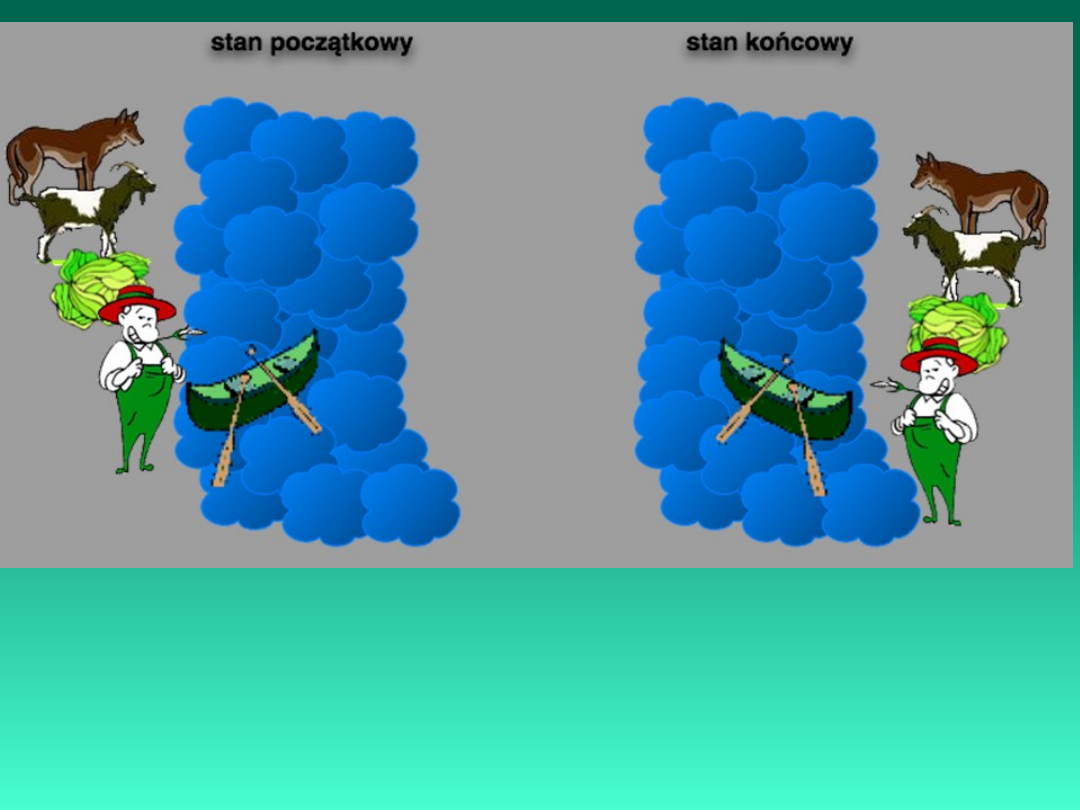
Powyższe zadanie jest klasycznym przykładem
problemu, w którym poszukujemy ciągu operacji
jakie przekształcą pewien stan początkowy w stan
końcowy.

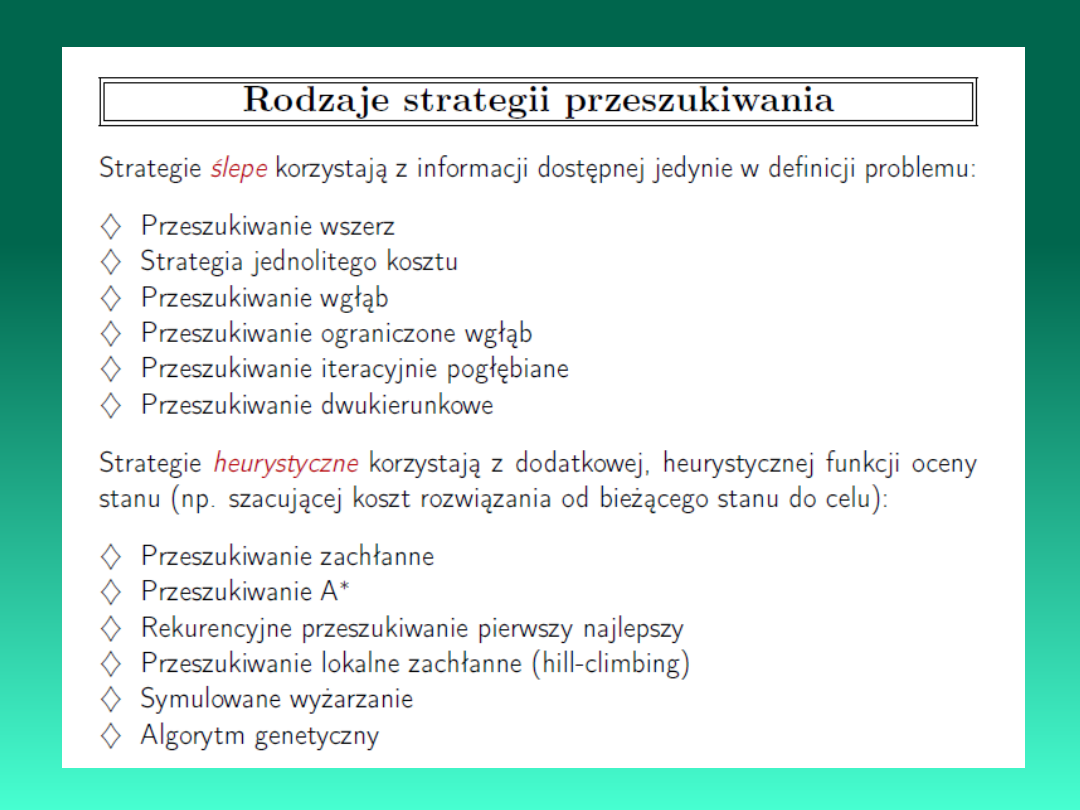
Najprostszą formą przeszukiwania przestrzeni stanów jest algorytm określany
jako generuj i testuj.
Przykład:
% Program naczynia generuje stany bez powtórzeń
%trace
Database
s(Integer,Integer)
Predicates
nondeterm run
d(Integer,Integer,Integer,Integer)
Clauses
run:-s(X,Y),d(X,Y,7,Y).
%napelnienie A
run:-s(X,Y),d(X,Y,0,Y).
%wylanie A
run:-s(X,Y),D=7-X,D>=Y,X1=X+Y,d(X,Y,X1,0).
%przelanie B do A
run:-s(X,Y),D=7-X,D<Y,Y1=Y-D,d(X,Y,7,Y1). %uzupelnienie A
run:-s(X,Y),d(X,Y,X,5).
%napelnienie B
run:-s(X,Y),d(X,Y,X,0).
%wylanie B
run:-s(X,Y),D=5-Y,D>=X,Y1=Y+X,d(X,Y,0,Y1).
%przelanie A do B
run:-s(X,Y),D=5-Y,D<X,X1=X-D,d(X,Y,X1,5). %uzupelnienie B
run:-!,run.
d(_,_,X,Y):-s(X,Y),!,fail.
d(X0,Y0,X,Y):-assert(s(X,Y)),write(X0,",",Y0," > ",X,",",Y),nl,
X=4,write("--------------"),nl,readchar(_).
Goal
assert(s(0,0)),
run,fail.
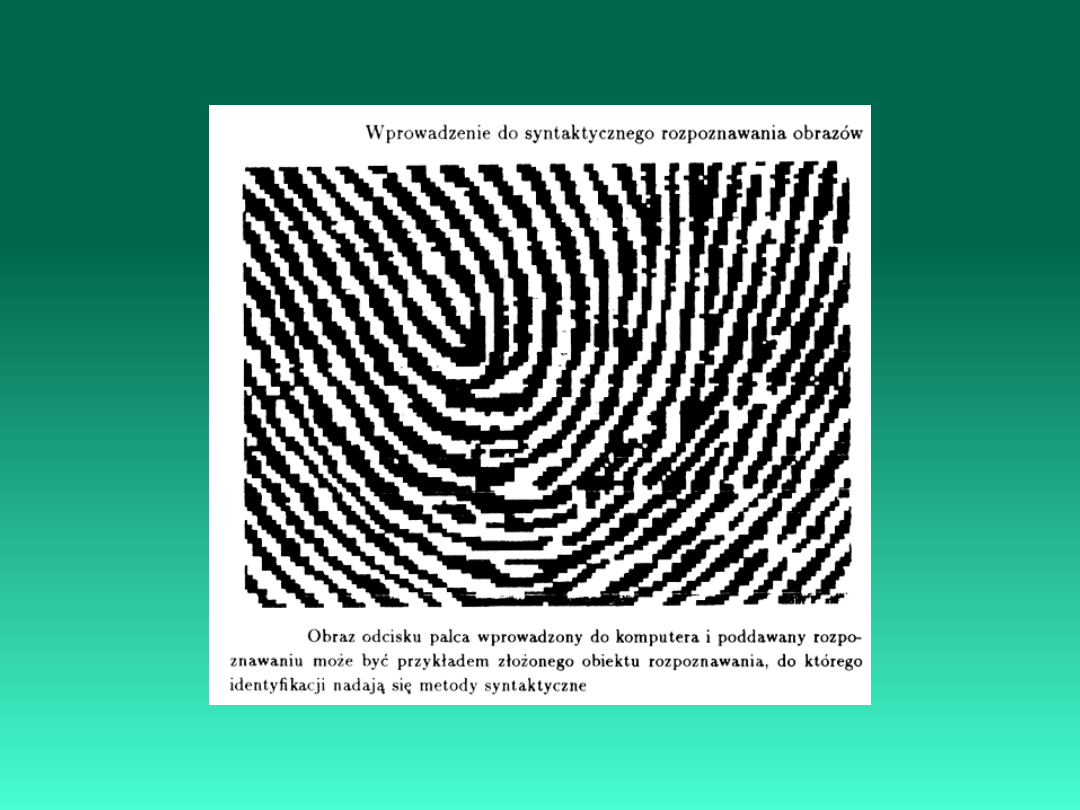
Rozpoznawanie obrazów
W zadaniu rozpoznawania obrazów chodzi o rozpoznawanie
przynależności rozmaitego typu obiektów (lub zjawisk) do
pewnych klas. Rozpoznawanie to ma być prowadzone w sytuacji
braku apriorycznej informacji na temat reguł przynależności
obiektów do pewnych klas, a jedyna informacja możliwa do
wykorzystania przez algorytm lub maszynę rozpoznającą jest
zawarta w ciągu uczącym, złożonym z obiektów, dla których
znana jest prawidłowa klasyfikacja.
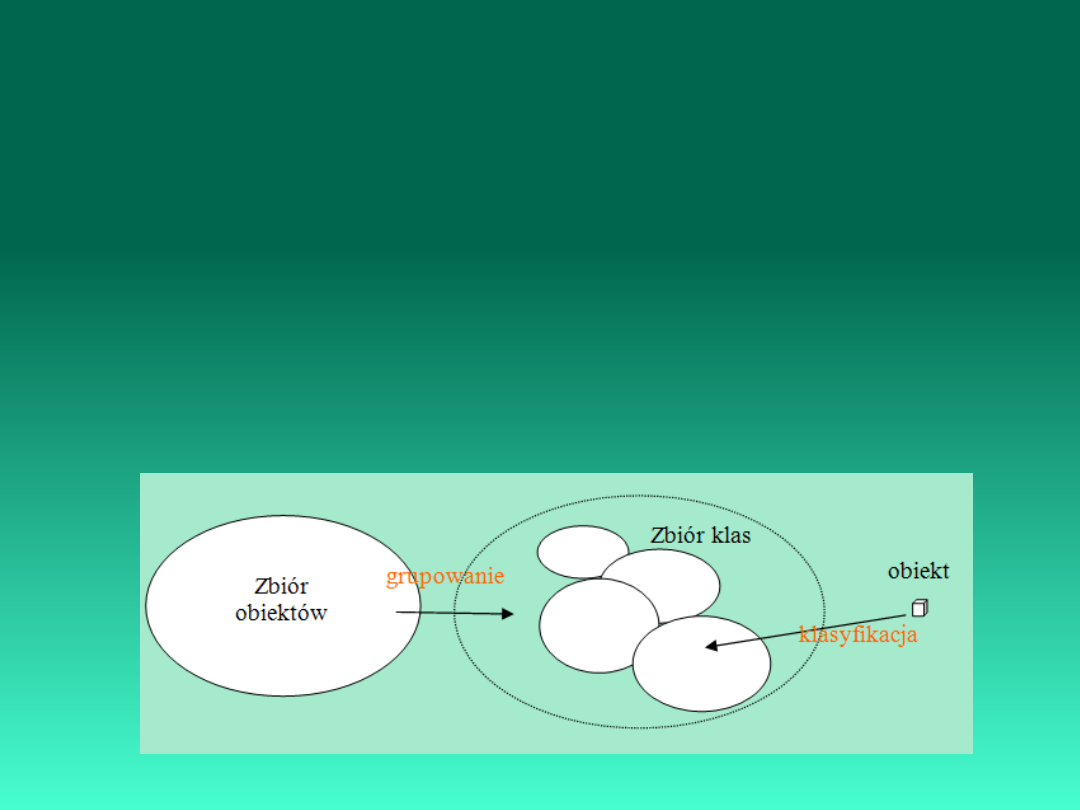
Rozpoznawanie obrazów obejmuje dwa komplementarne w
stosunku do siebie zadania: grupowanie (klasteryzacja, analiza
skupień) i klasyfikację.
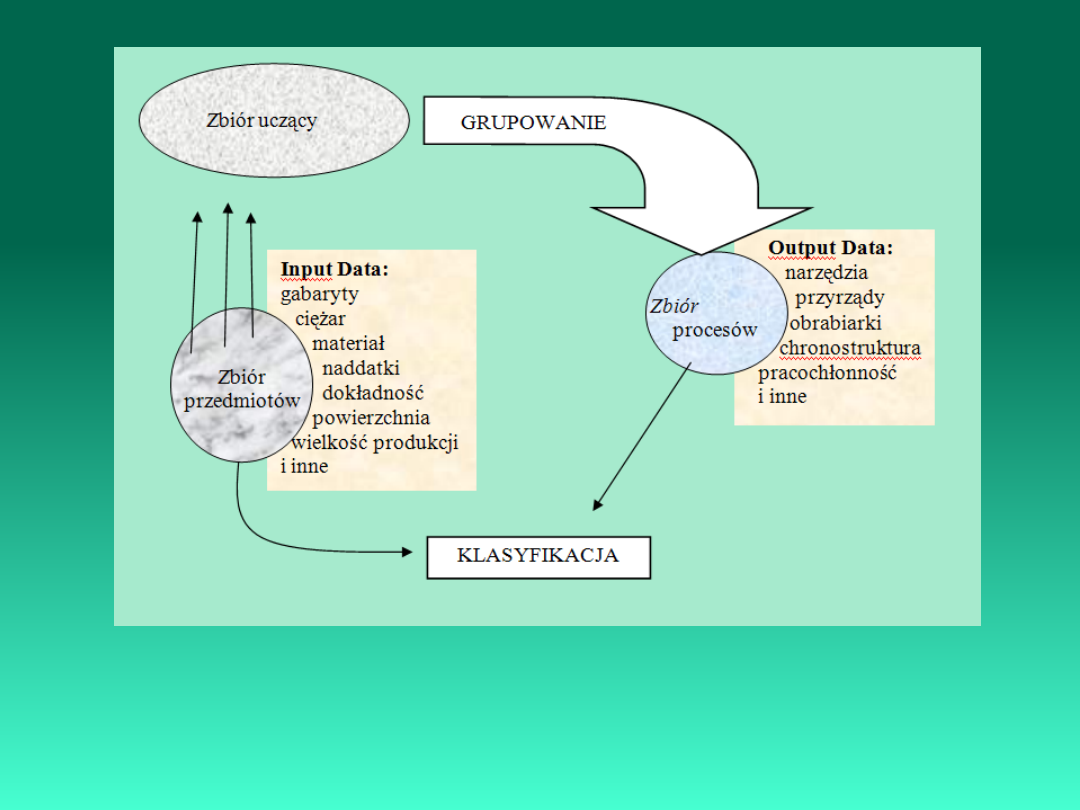
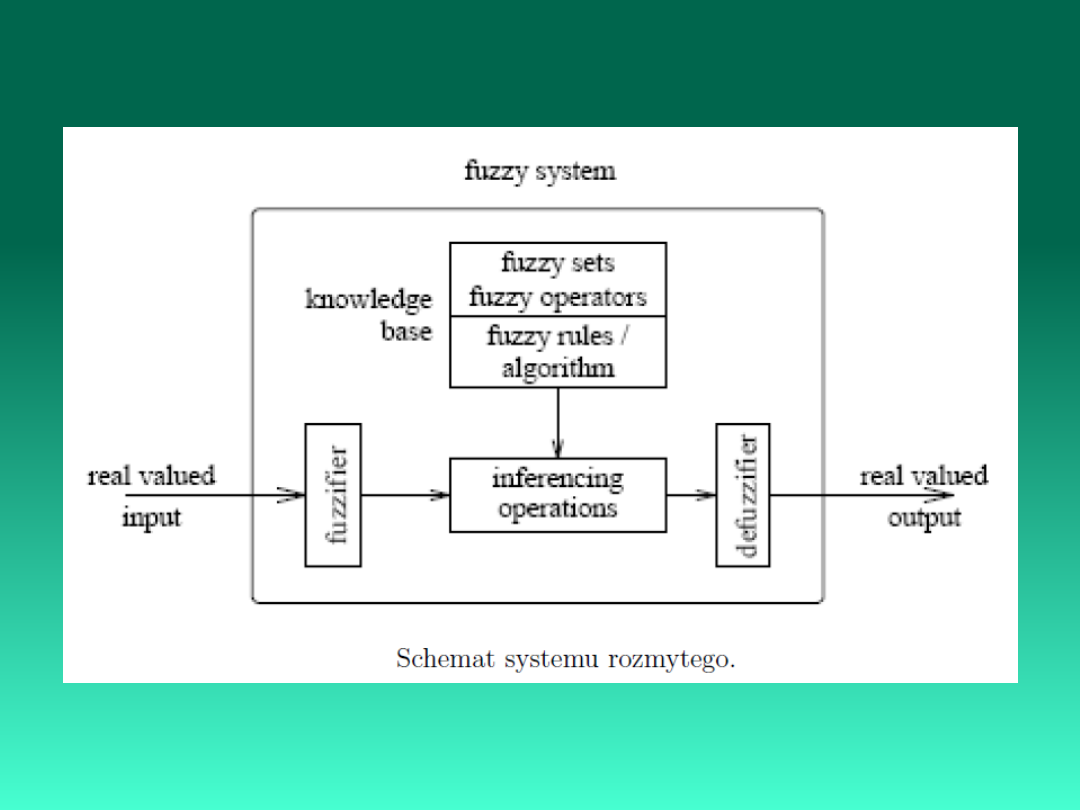
Schemat rozpoznawania obrazów na przykładzie klasyfikacji przedmiot proces obróbki

Niektóre zastosowania metody rozpoznawania
obrazów:
•rozpoznawanie mowy, pisma, znaków,
•analiza topograficznych zdjęć lotniczych,
•rozpoznawanie złóż surowców mineralnych,
•opisywanie elektrokardiogramów,
•prognozowanie zachowania się giełd finansowych,
•diagnostyka układów elektronicznych,
•badania psychiatryczne,
•prognozowanie sprzedaży,
•interpretacja badań biologicznych, medycznych,
•prognozy cen,
•planowanie remontów maszyn,
•typowanie na wyścigach konnych,
•selekcja celów śledztwa,
•dobór pracowników.
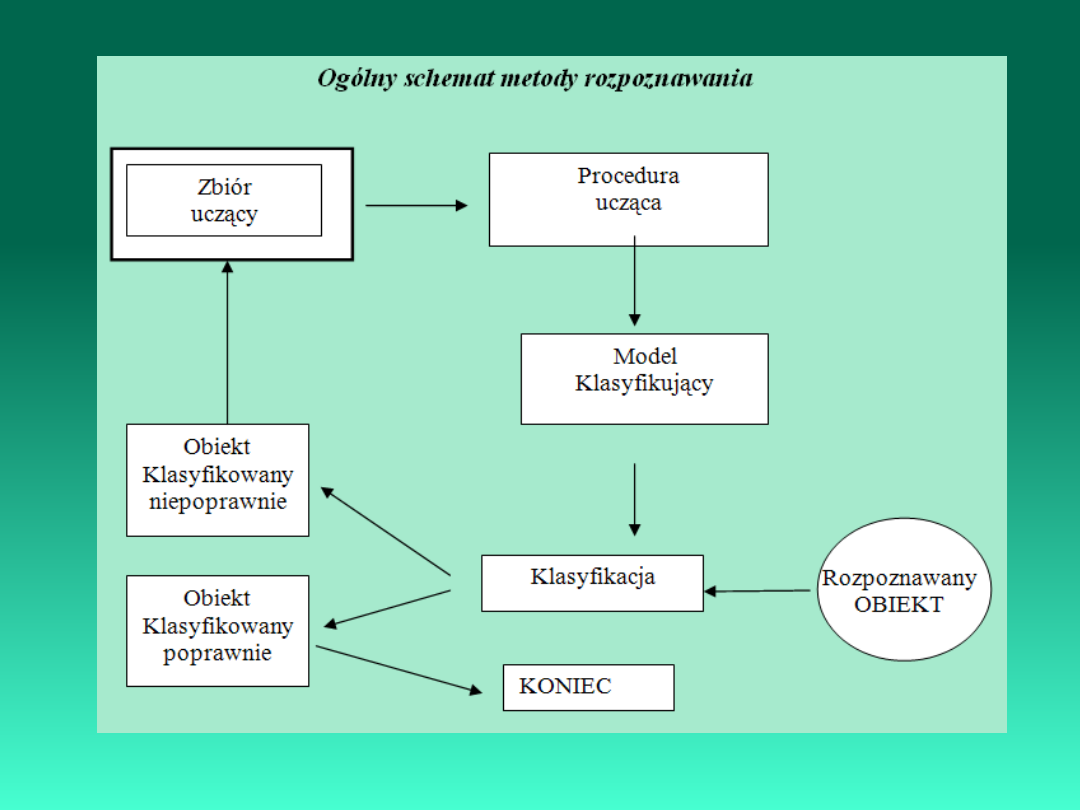
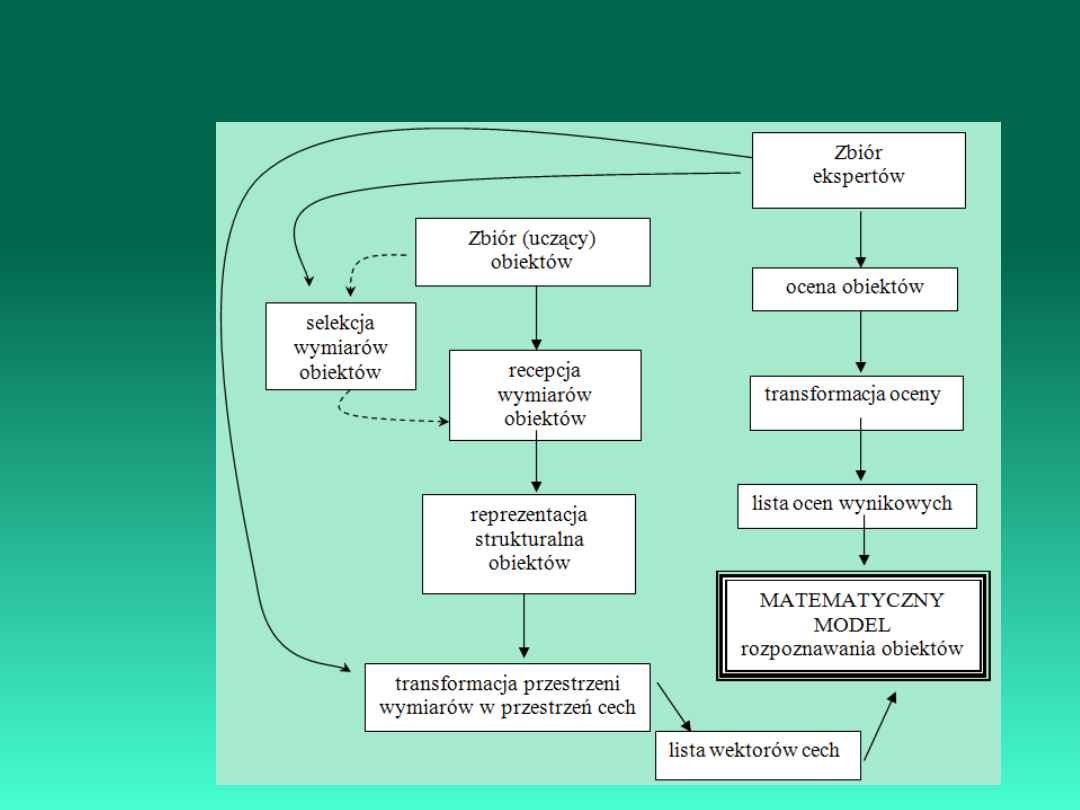
Automatyzacja percepcji (odczytania) wiedzy w obszarze przedmiotowym
jest realizowana zgodnie z modelem percepcji wiedzy:

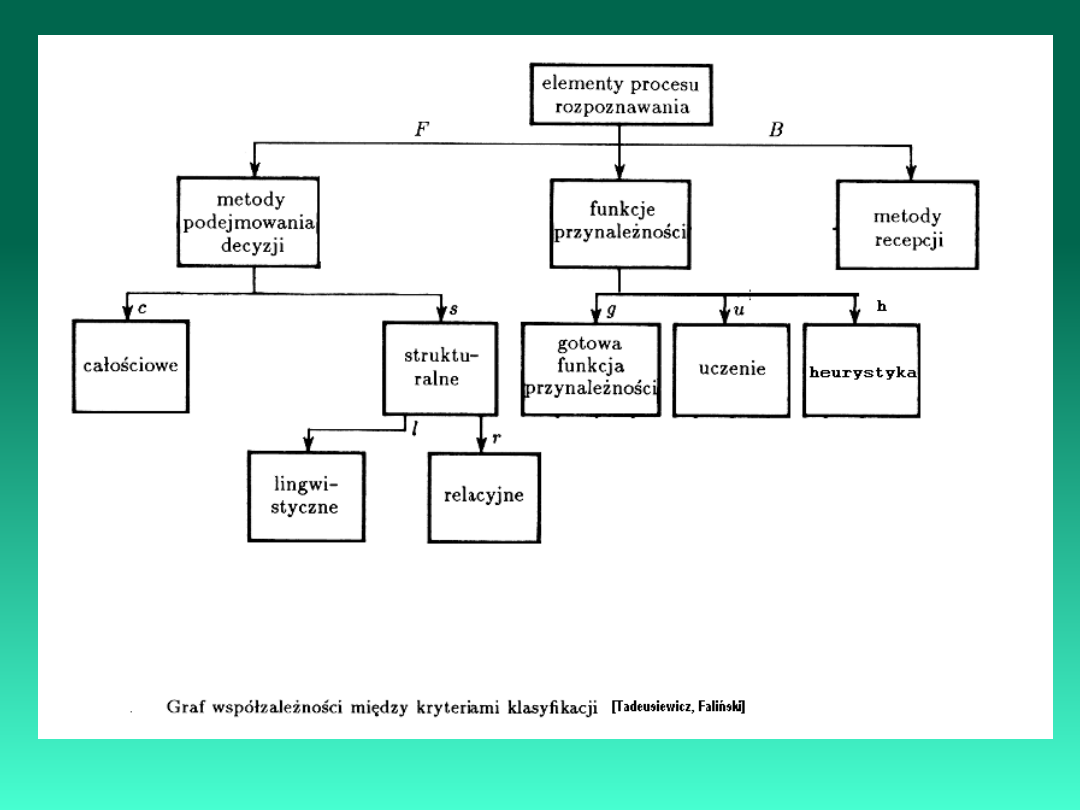
Klasyfikacja metod rozpoznawania
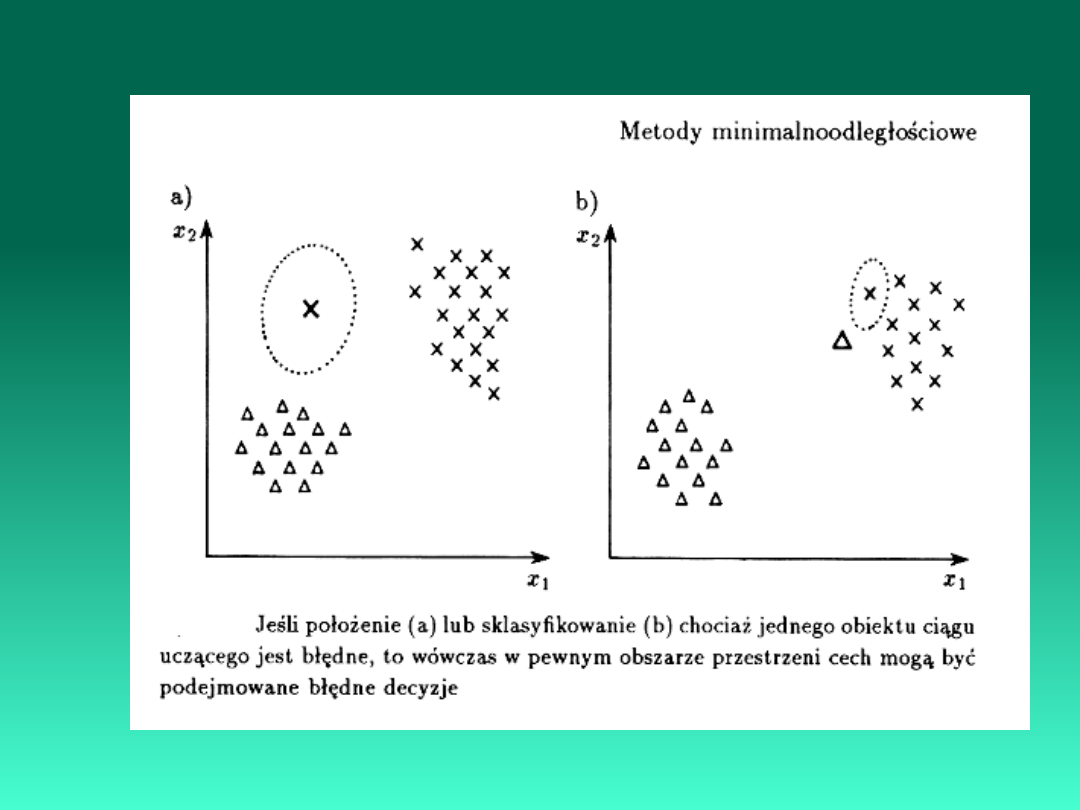
1. Metody minimalno-odległościowe
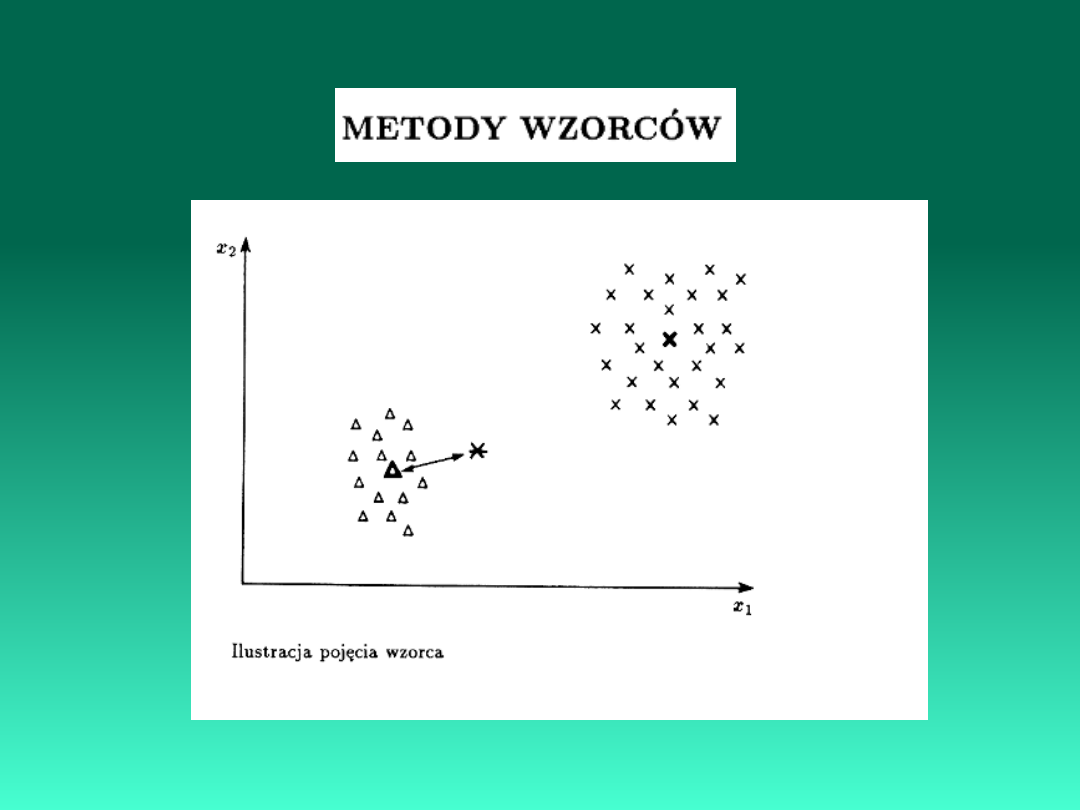
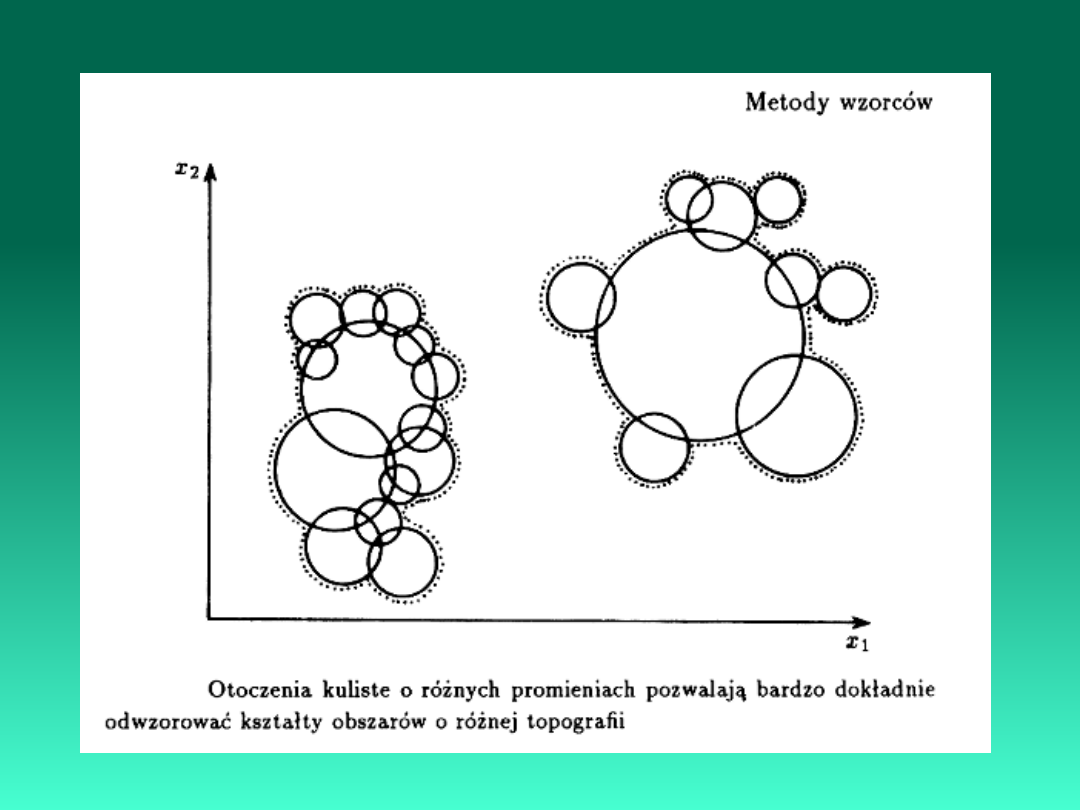
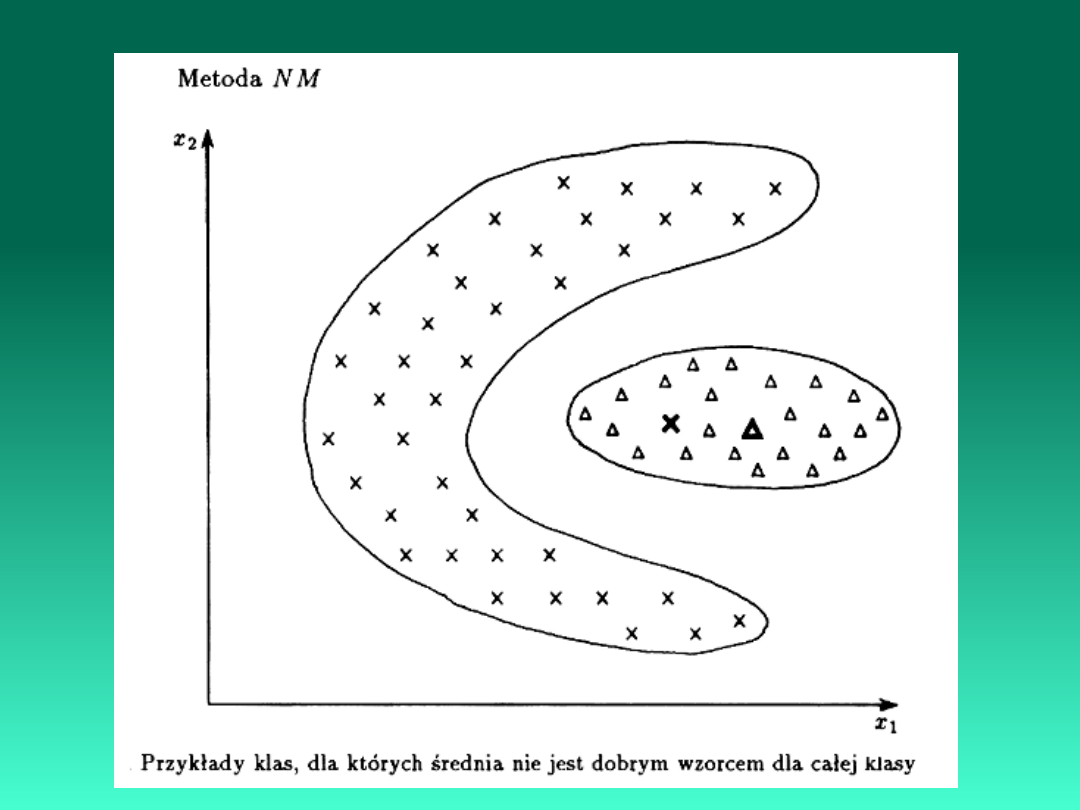
2. Metody wzorców
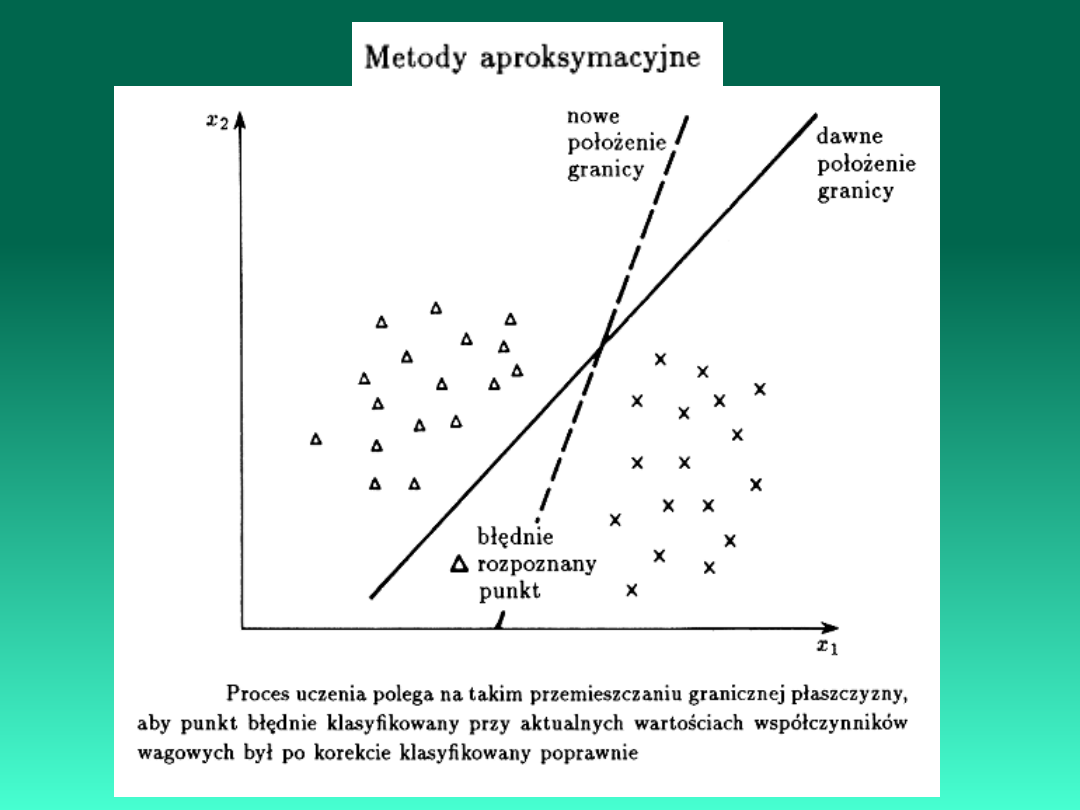
3. Metody aproksymacyjne
4. Metody probabilistyczne
5. Metody funkcji potencjalnych
6. Sieci neuronowe
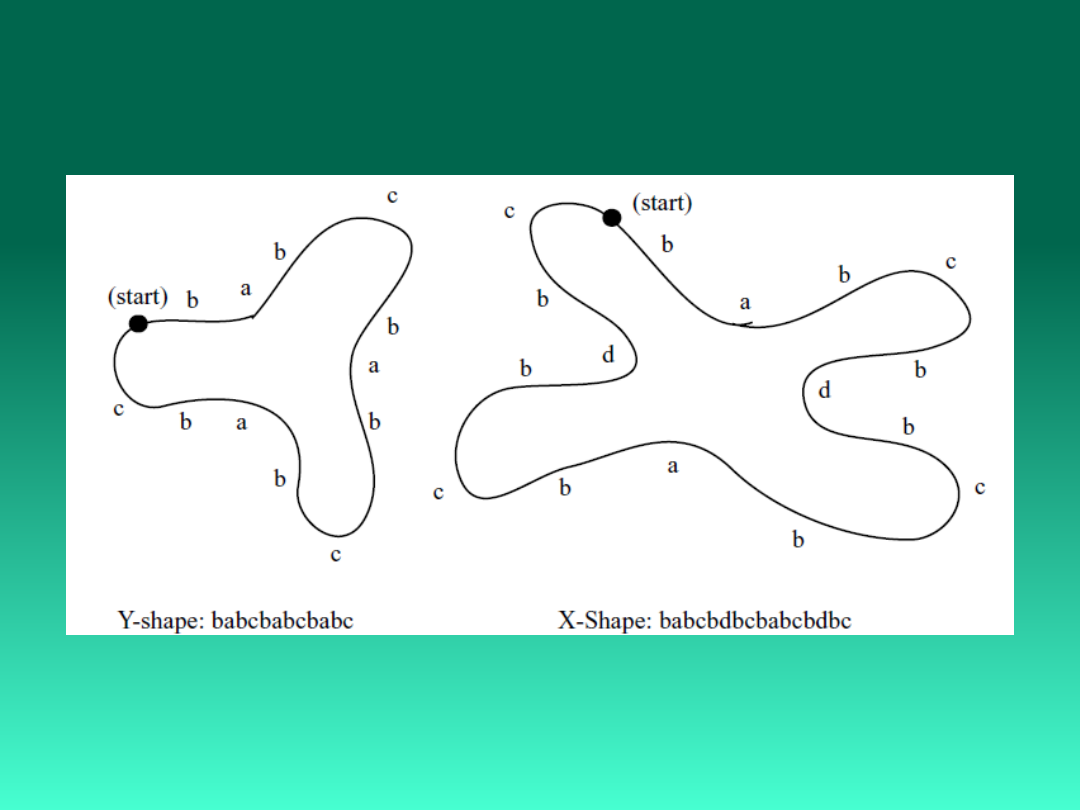
7. Metody syntaktycznego
rozpoznawania obrazów
8 Metody ciągowe
9 Metody drzewowe
10 Metody grafowe
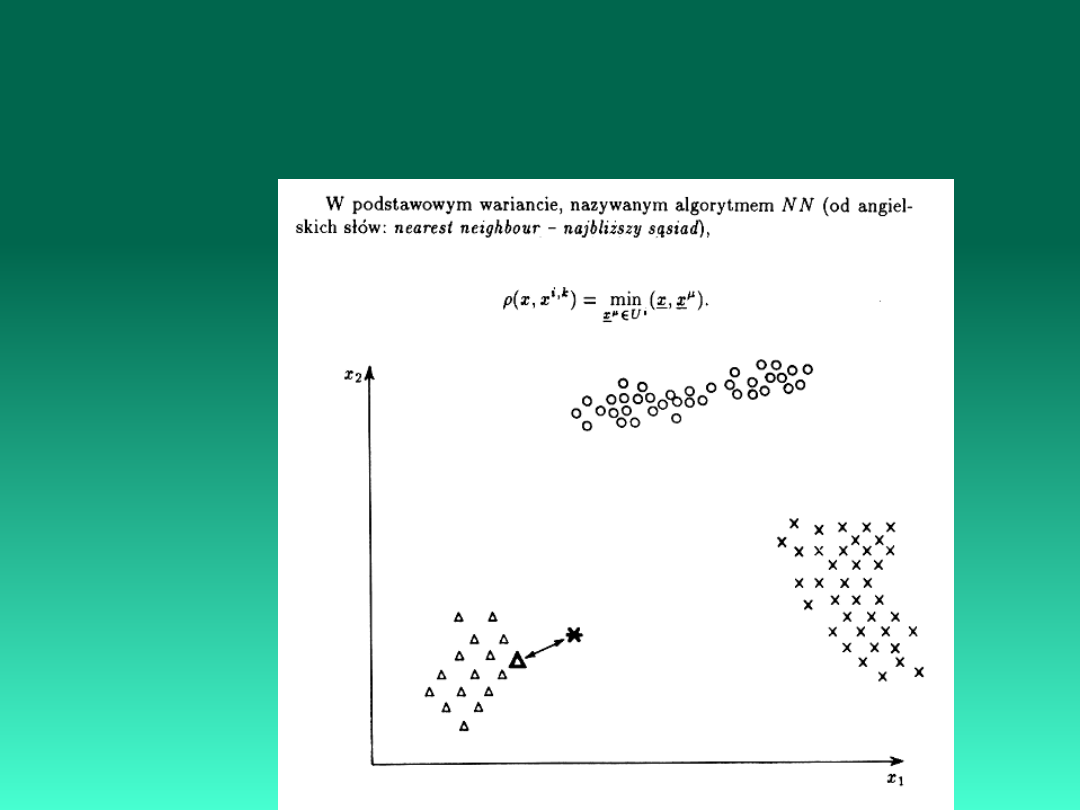
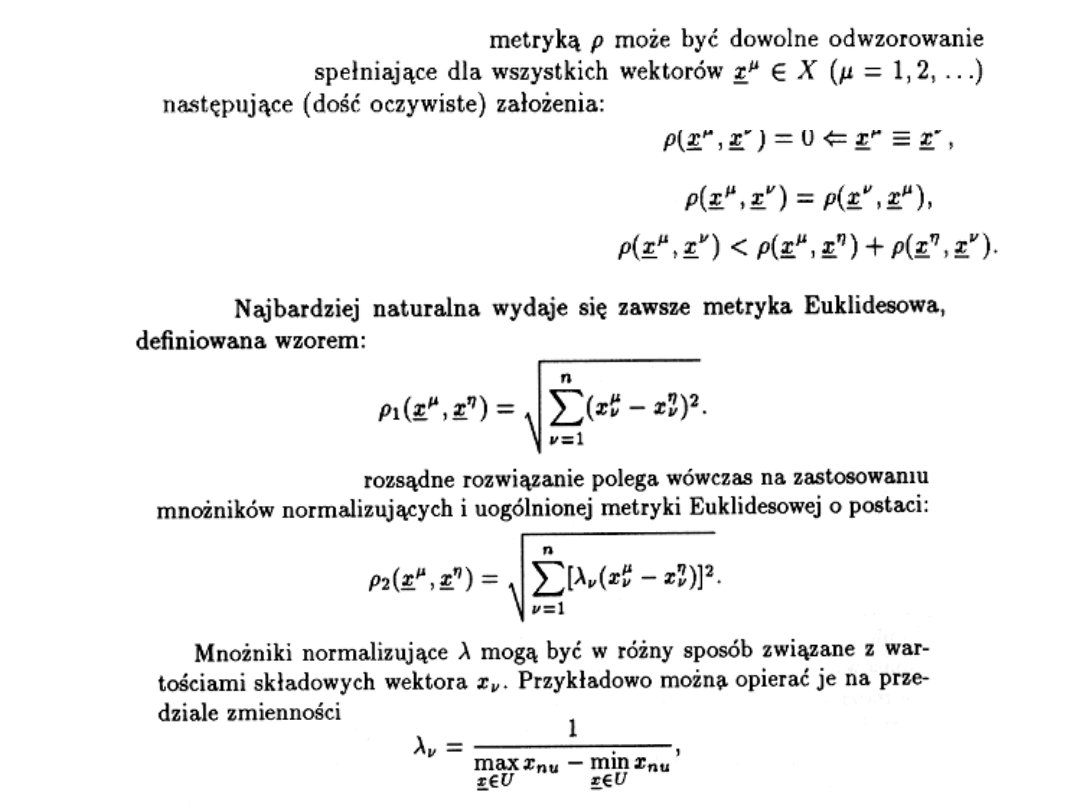
Metody minimalnoodległościowe są oparte na przesłankach
związanych z geometrią przestrzeni cech. Jeśli punkty, odpowiadające
obiektom różnych klas grupują się w
formie wyraźnych skupisk, to wówczas możliwe jest i celowe posłużenie
się pojęciem
odległości przy podejmowaniu decyzji.
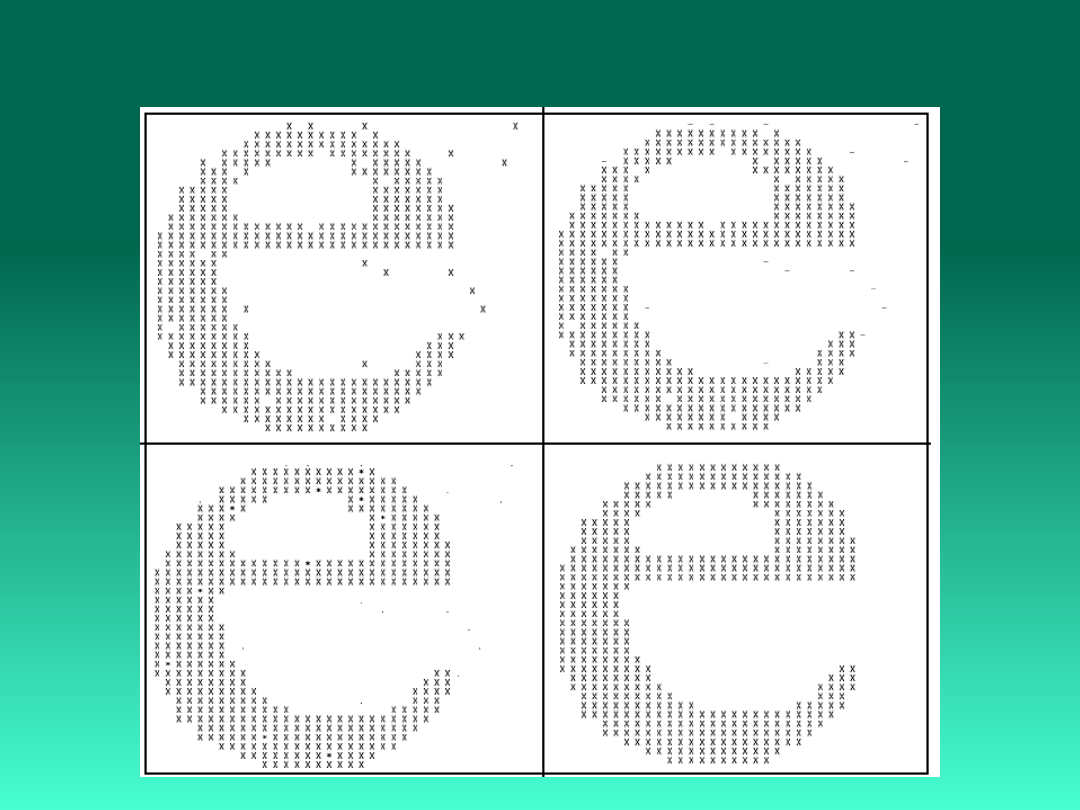
Rozpoznawanie kształtów
Współczynniki kształtu
Compactness - stosunek pola obiektu do pola
najmniejszego
prostokąta w jakim się obiekt mieści;
Rmin/Rmax - pierwiastek stosunku minimalnej odległości
konturu od środka ciężkości do maksymalnej odległości
konturu
od środka ciężkości;
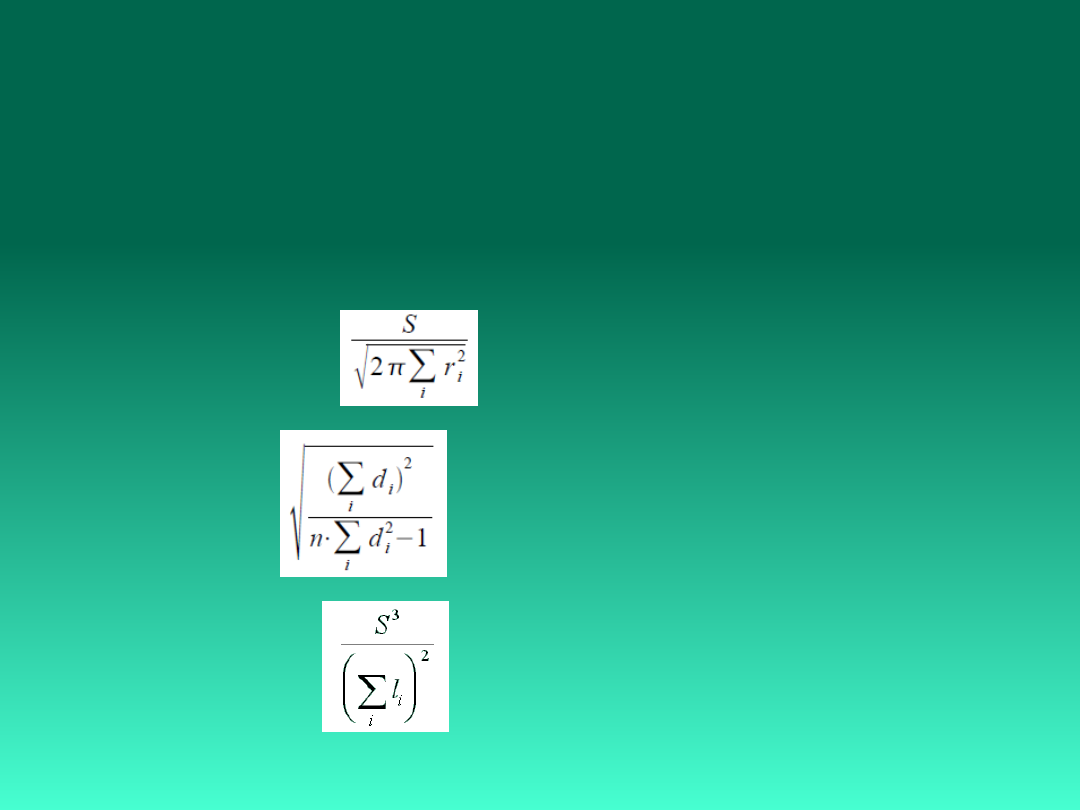
Blaira - Blissa –
gdzie: S
- pole powierzchni obiektu,
ri - odległość piksela obrazu
od środka ciężkości,
i - numer piksela obiektu.
Haralicka –
di - odległość piksela konturu
od środka ciężkości,
n – liczba pikseli konturu.
Danielssona -
li - minimalna odległość piksela obiektu
od konturu obiektu.
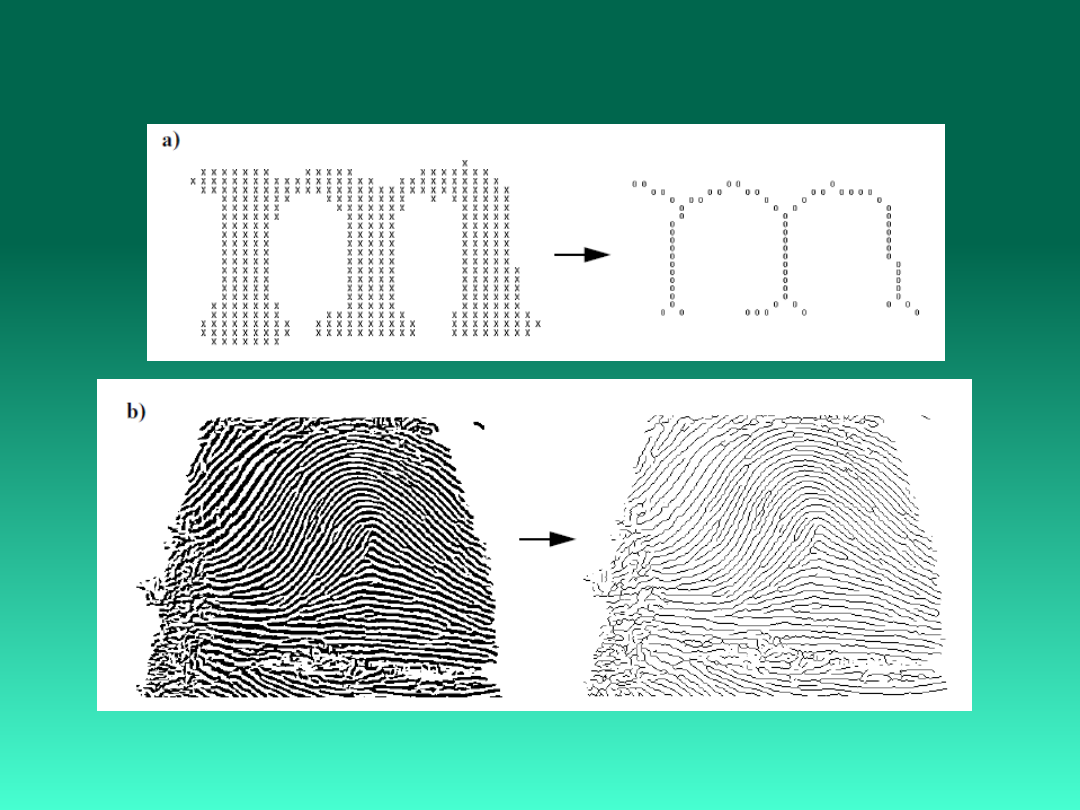
Wyznaczanie szkieletu

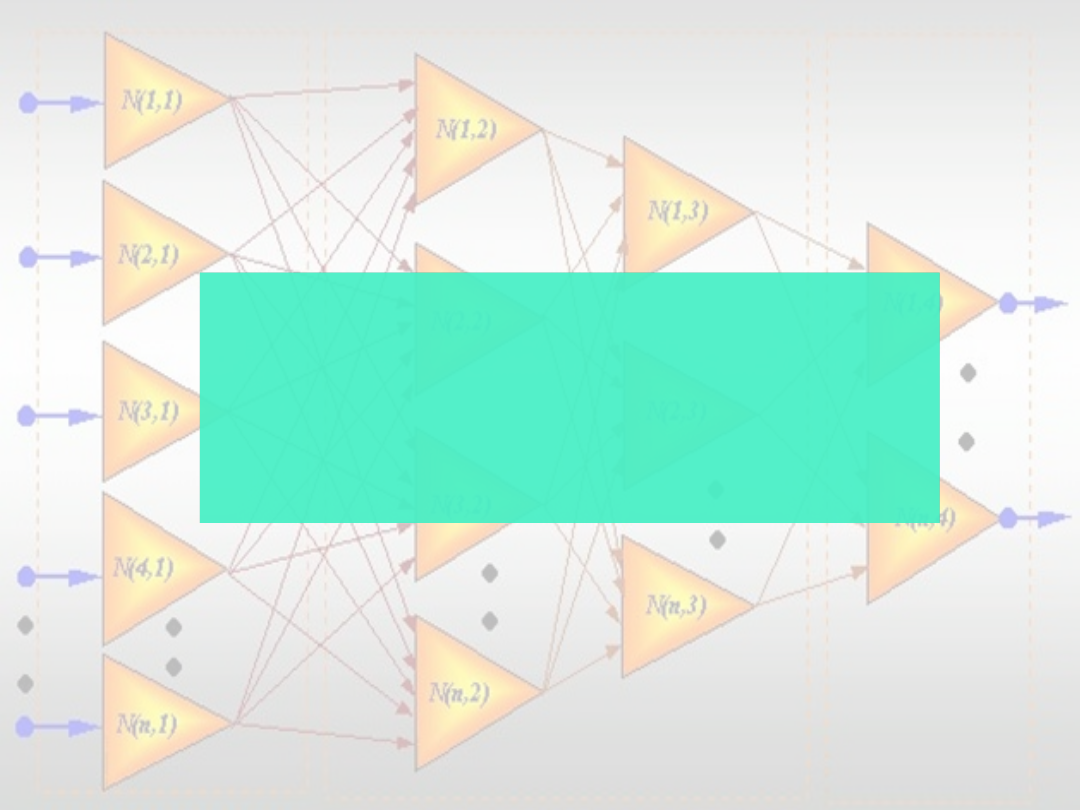
Sieci
neuronowe
Sieci
neuronowe

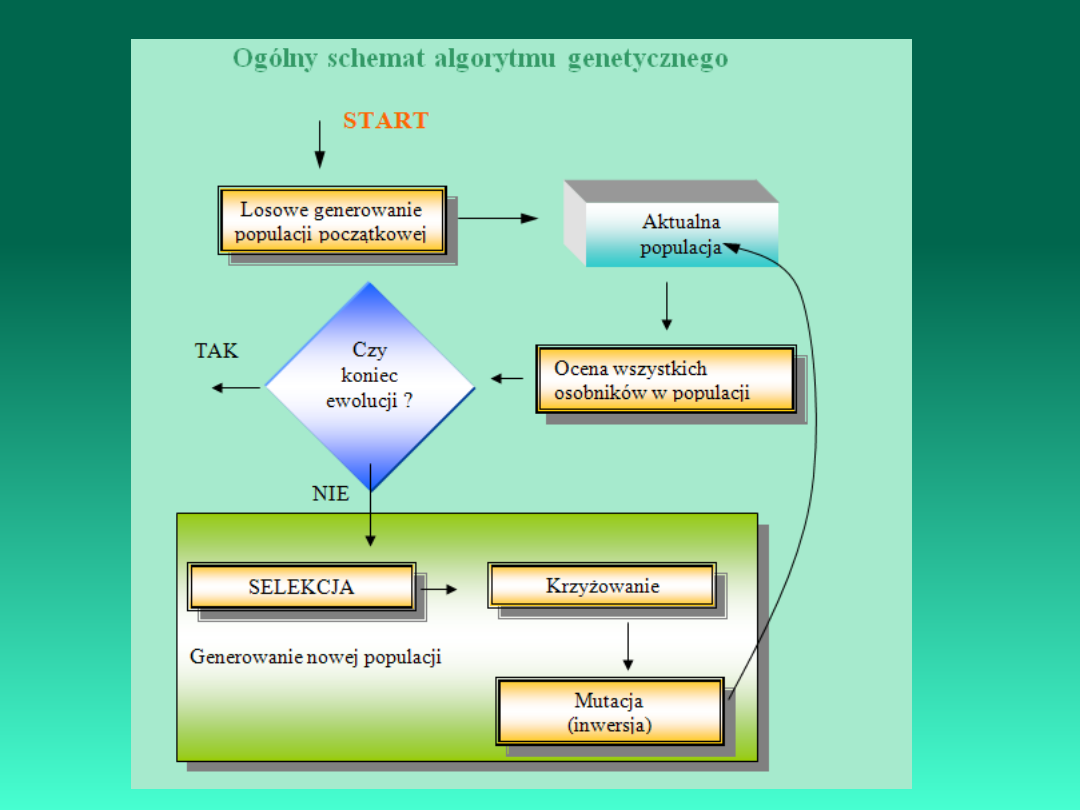
TECHNIKI
EWOLUCYJNE
Algorytmy ewolucyjne (ang. Evolutionary algorithms
(EAs)) są stochastyczną techniką optymalizacji
bazującą na zasadach naturalnej ewolucji.
Jedną z podstawowych zasad ewolucji jest zwiększenie
szans na przeżycie osobnika (populacji) lub jego
potomka.
Celem badań nad EAs jest:
- Wyjaśnić
istotę
procesów
adaptacyjnych,
występujących w świecie natury;
- Stworzyć oprogramowanie, które odtwarzałoby
podstawowe
mechanizmy
rządzące
systemami
biologicznymi.
Cechy EAs:
- łatwo je implementować na komputerach
równoległych,
- nie zależy w nich na rozwiązaniach optymalnych,
lecz bliskich optymalnemu,
- są stosowane wówczas gdy techniki tradycyjne nie
wystarczą.
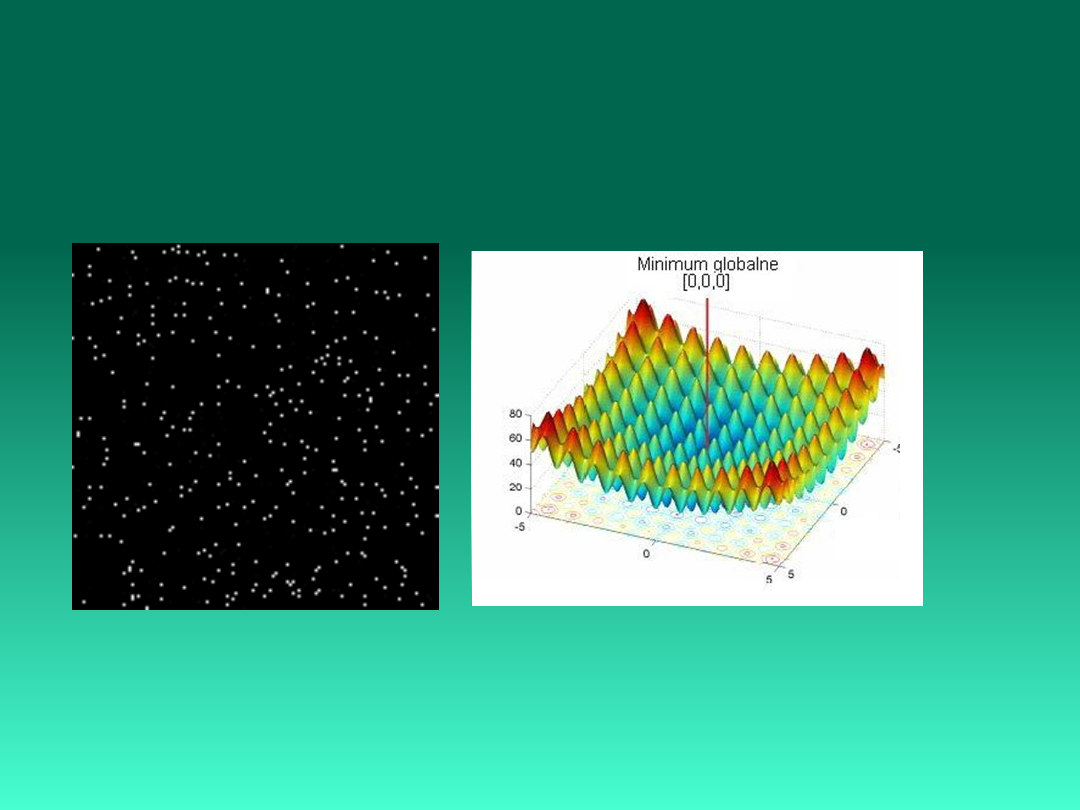
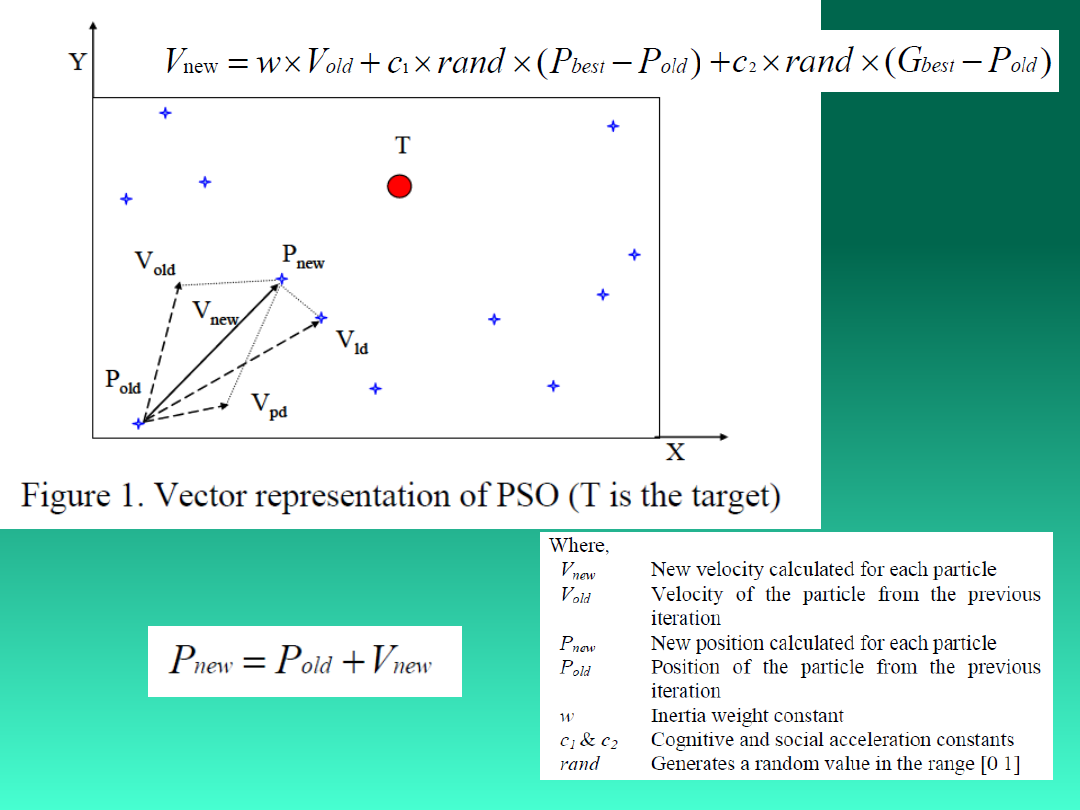
Metoda optymalizacji rojem cząstek
PSO - Particle Swarm Optimization
Particle swarm optimization (PSO) is a parallel population-based
computation technique proposed by Kennedy and Eberhart
(Eberhart and Kennedy, 1995;

20.01.2011

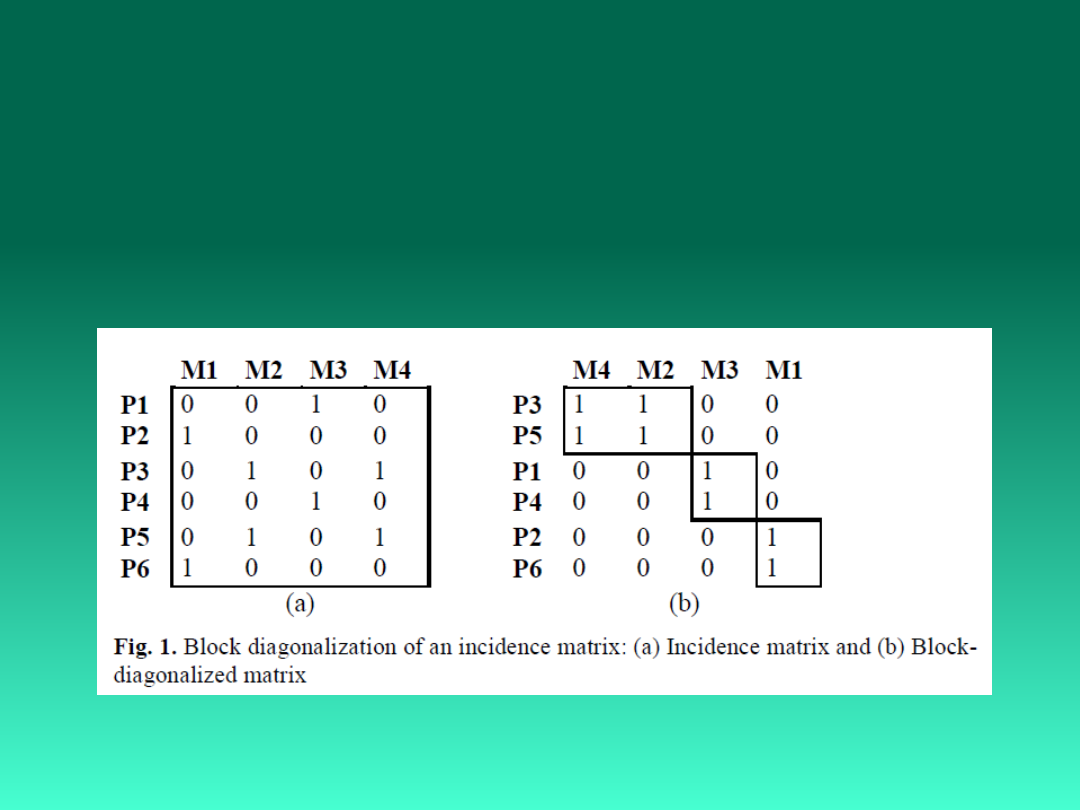
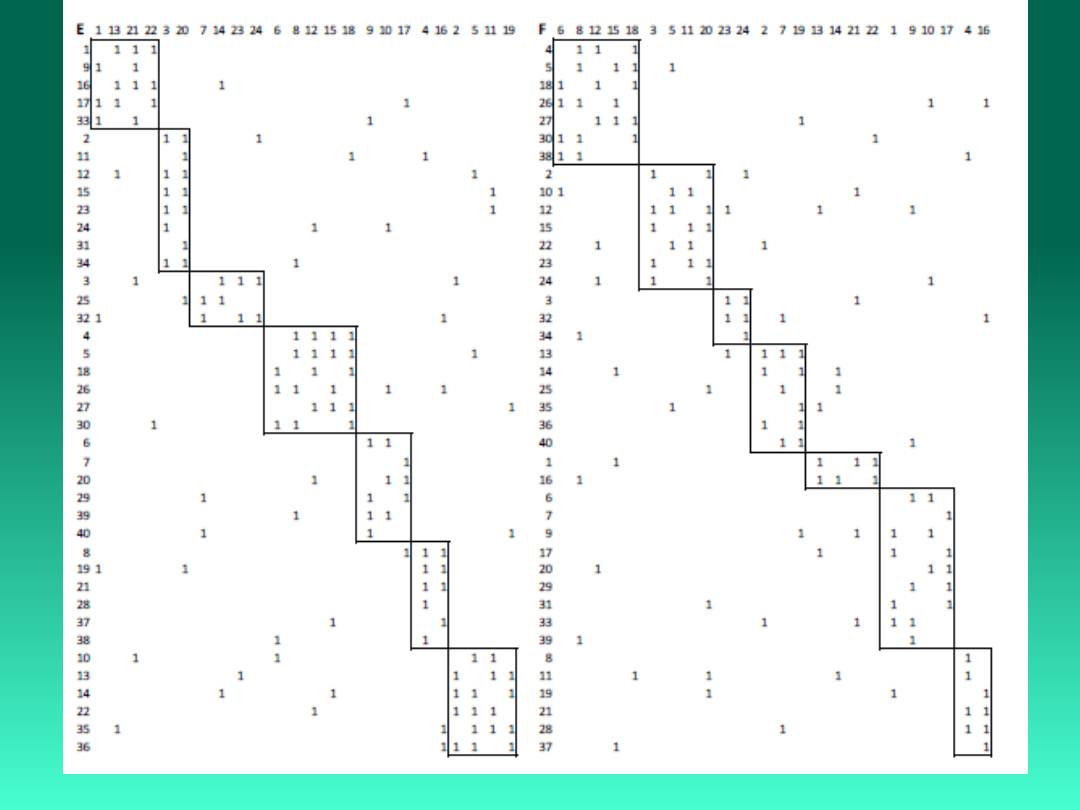
Konfiguracja zautomatyzowanych gniazd
obróbkowych
Manufacturing Cell Formation Problems
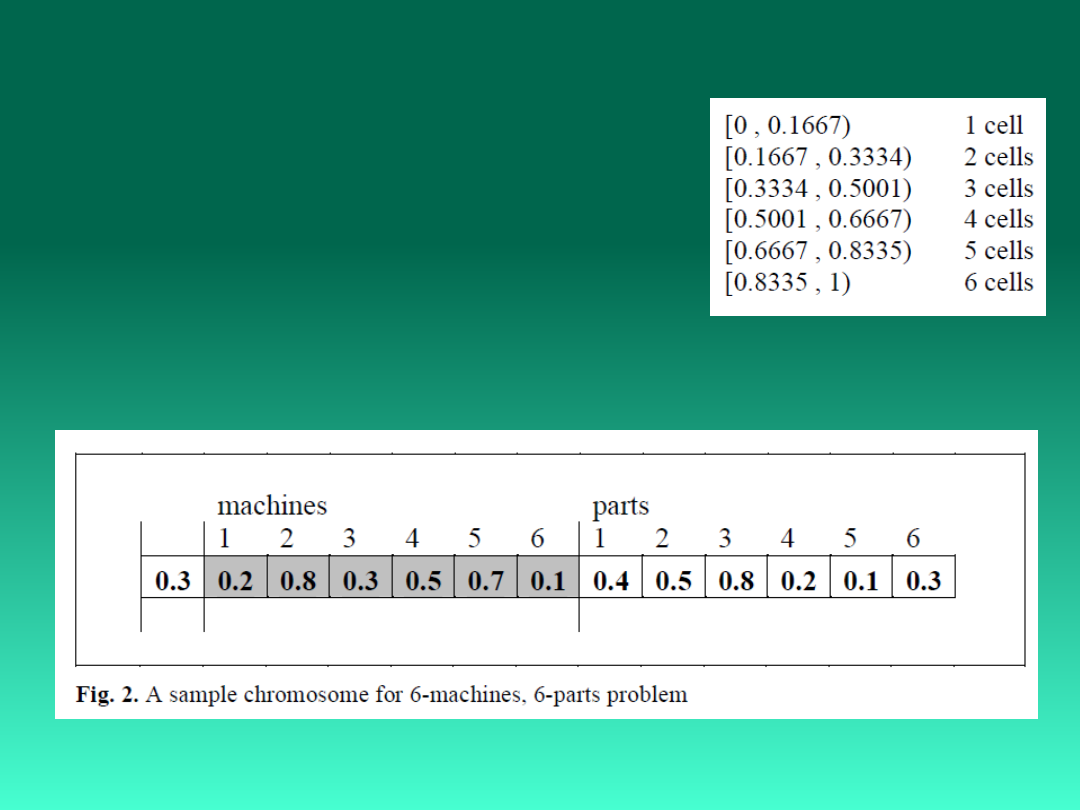
The chromosome representation consists of
three sections: one representing the number of
cells to be formed, one representing the parts,
one representing the machines. The first section
contains only one gene. The second and the third
sections contain m (number of the machines)
and n (the number of the parts) genes
respectively. All genes in the chromosome have
values between 0 and 0.99 and the genes in
second and third sections are decoded by using
the number of cells (c) which is determined by
the first gene. For example, a solution for the 6-
machines, 6-parts problem can be represented
as the chromosome is given in Fig.2. Since this
example contains 6 machines, the maximum c
can be 6 so the range [0 , 1) is divided into 6
equal ranges as given below.
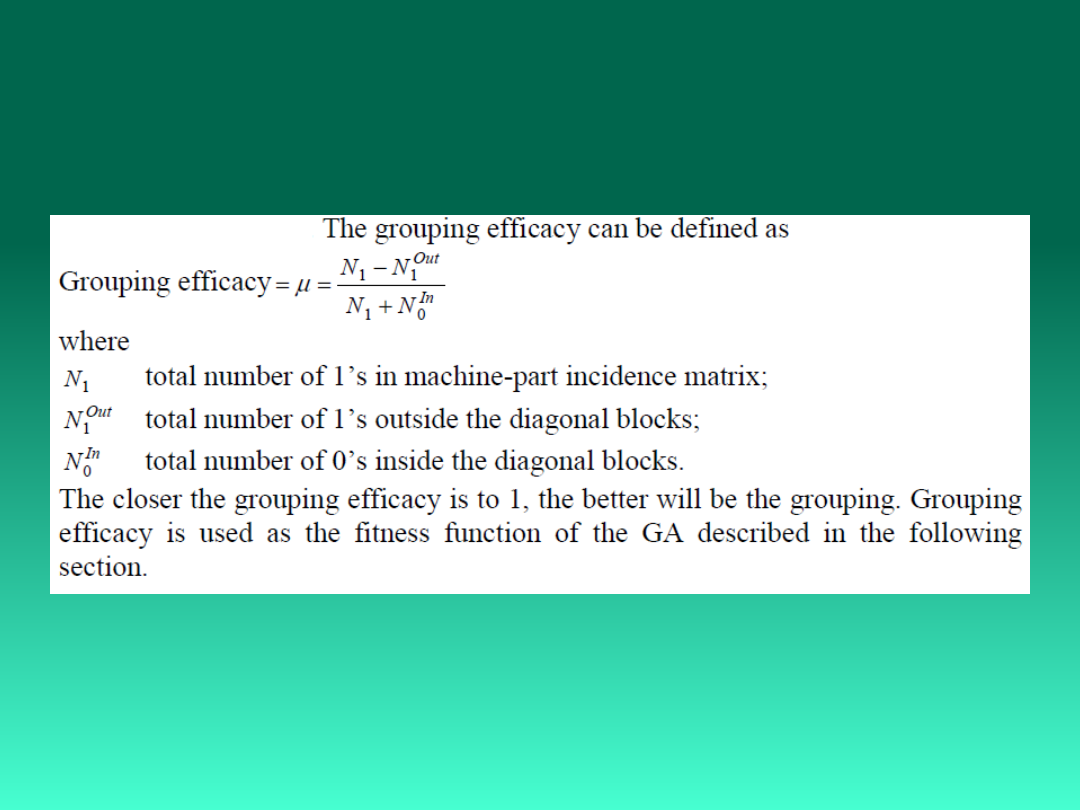
Initial population. Initial population is constructed by generating
random numbers in range [0,1) for each genes in the
chromosomes of the initial population.
Życie jest to możliwość trwania (reprodukcji i
ewolucji) bardzo nieprawdopodobnych
uporządkowanych stanów materii (Erwin
Schrődinger).
Żywy jest ten kto (Ellen Thro):
• Istnieje w przestrzeni i w czasie.
• Rozmnaża się.
• Przechowuje informację o samym sobie.
• Oddziałuje z otoczeniem.
• Składa się z niezależnych części.
• Wykazuje stabilność przy zmiennych warunkach
środowiska.
• Ewoluuje.
• Rośnie lub rozszerza się.
• Może przetwarzać materię na energię (posiada
metabolizm).
Sztuczne życie: dziedzina badań zajmująca się modelowaniem
i symulacją zjawiska życia w szczególności modelowaniem
żywych organizmów w różnych środowiskach (komputerach,
układach elektronicznych lub chemicznych), w celu odkrycia
istoty i uniwersalnych cech „życia” jakie znamy i jakie
gdziekolwiek mogłoby zaistnieć.
Bóg zawarł w prawach Natury tajemną
sztukę, tak aby chaos przemienił się w
doskonały system świata (Immanuel Kant).
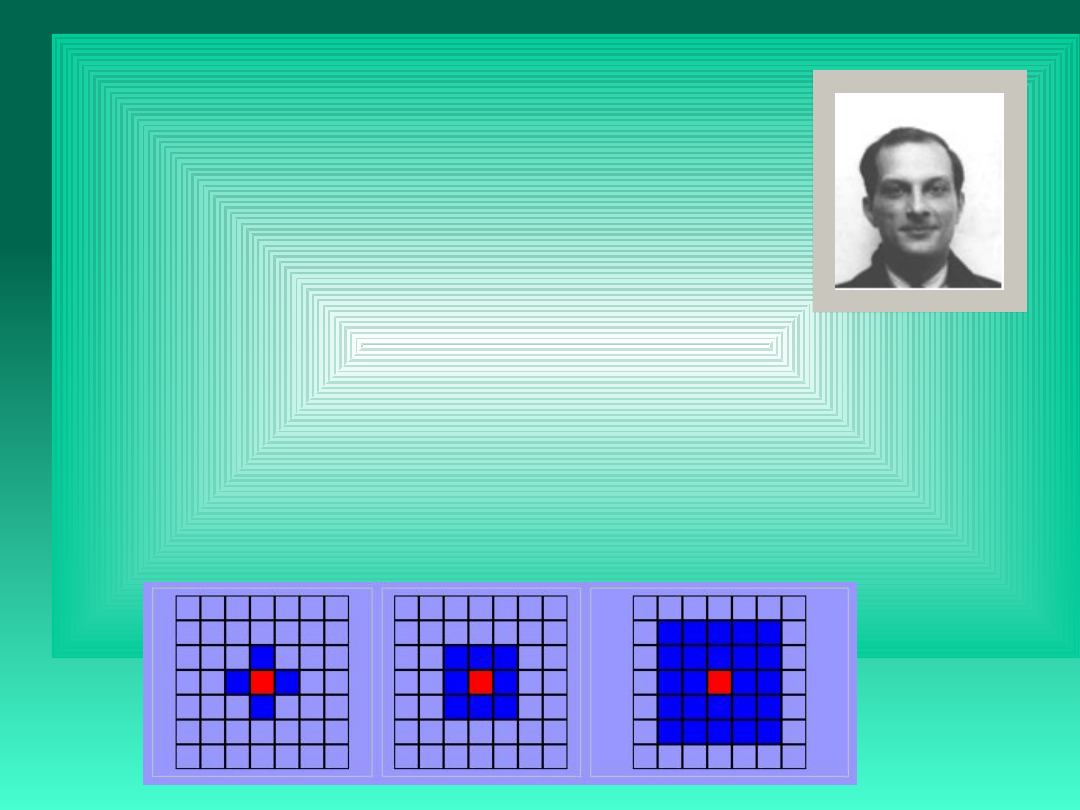
Automat komórkowy jest matematycznym, równoległym
modelem obliczeniowym
i charakteryzuje się:
• zbiorem C komórek c
i
, tworzących regularną sieć
w n - wymiarowej przestrzeni;
• zbiorem S stanów s
i
pojedynczych komórek,
zawierającym k
i
elementów;
• regułami F określających stan komórki w chwili t+1 w zależności od jej
stanu
w chwili t oraz stanu komórek ją otaczających.
s
i
(t+1) = F(s
i
(t), {s
j
(t)}),
j O(i)
gdzie O(i) jest otoczeniem i-tej komórki.
otoczenie von Neumann’a otoczenie Moore’a rozszerzone otoczenie Moore’a

Skąd bierze się złożoność automatów komórkowych ?
Weźmy pod uwagę:
• automat jednowymiarowy;
• o promień sąsiedztwa = 1;
• dwustanowy (1,0);
X
L
| X | X
P
111 110 101 100 011 010 001 000
1 0 1 1 0 1 0 0
(2,1)
2
8
= 256 automatów
(liczba stanów, promień sąsiedztwa)
(2,2) 2
32
= 4294967300 automatów
(3,1) 3
27
7.6 x 10
12
automatów
(4,1) 4
64
3.4 x 10
38
automatów
Zastosowania automatów komórkowych:
modelowanie i symulacja zjawisk fizycznych i biologicznych takich
jak:
- przepływy cieczy,
- formowanie się galaktyk,
- trzęsienia Ziemi,
- formowanie się struktur geologicznych,
- proces uwadniania cementu i starzenia betonu,
- procesy krystalizacji,
- modelowanie zachowania się lawiny śnieżnej
- generowanie i obróbka obrazów rastrowych,
- generowanie efektów kinowych i inne.
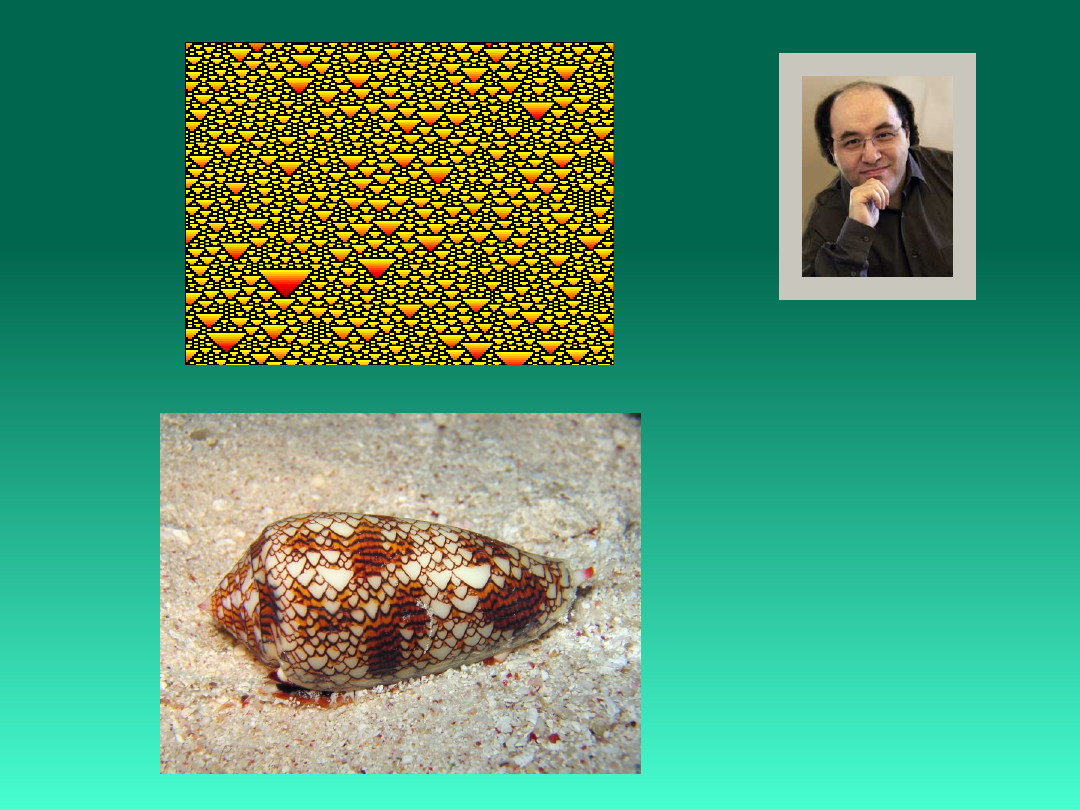
Stephen
Wolfram
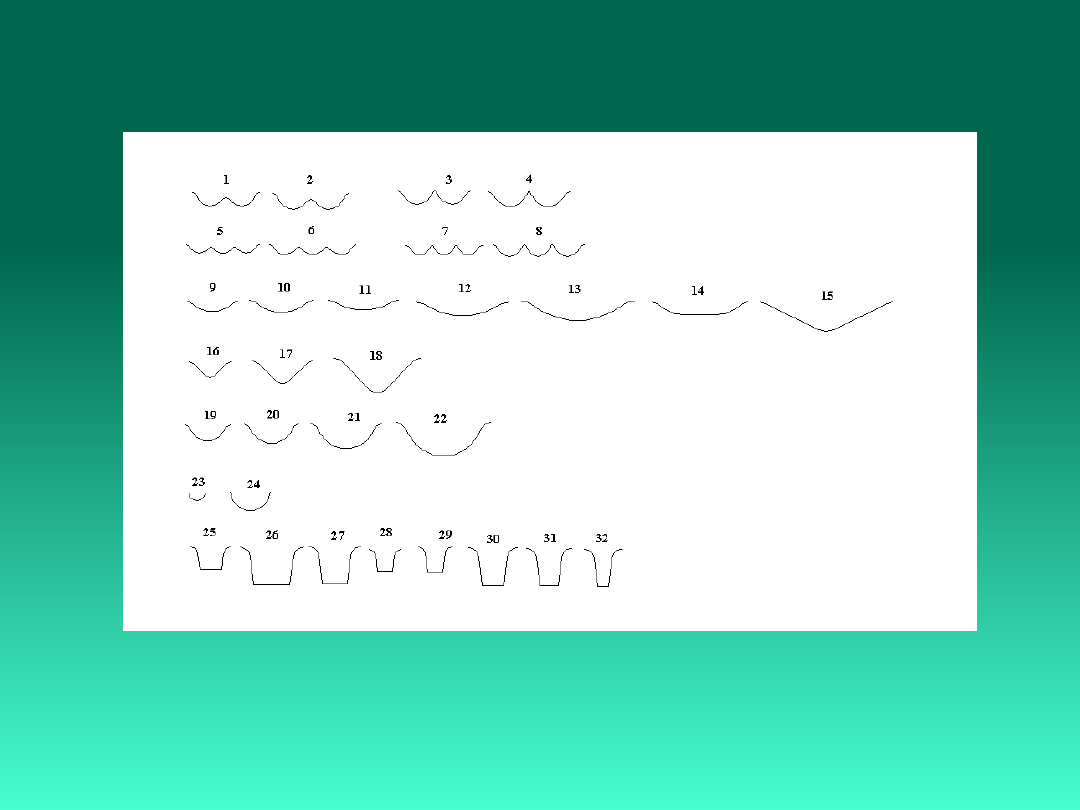
Przykład: metoda generowania przedstawiciela
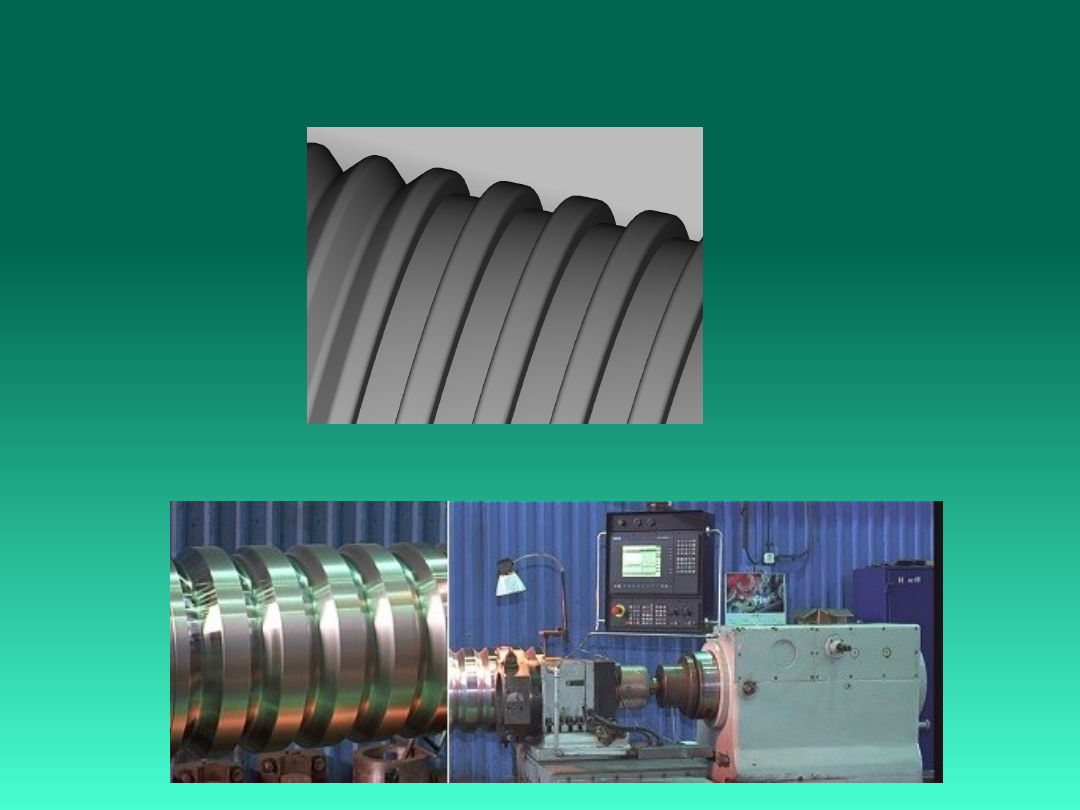
syntetycznego
Fragment powierzchni roboczej walca bruzdowego

Dziękuję za uwagę
Ask not what mathematics can do for biology.
Ask what biology can do for Mathematics.
Stan Ulam
Document Outline
- Slide 1
- Slide 2
- tematyka
- Slide 4
- Slide 5
- Slide 6
- DEFINICJE
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Pod-dziedziny sztucznej inteligencji:
- Najważniejsze osiągnięcia w rozwoju AI
- Najważniejsze osiągnięcia w rozwoju AI
- Najważniejsze osiągnięcia w rozwoju AI
- Najważniejsze osiągnięcia w rozwoju AI
- Porównanie mózgu ludzkiego i komputera.
- Zbiory rozmyte (Logika rozmyta)
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Funkcje Przynależności
- Typy Funkcji Przynależności
- Slide 25
- Przykłady rozmytych relacji
- Reguły rozmyte
- Operacje na liczbach rozmytych
- Slide 29
- Zastosowania logiki rozmytej
- Narzędzia AI
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
- Slide 44
- Slide 45
- Slide 46
- Slide 47
- Slide 48
- Slide 49
- Slide 50
- Slide 51
- Slide 52
- Slide 53
- Slide 54
- Slide 55
- Slide 56
- Slide 57
- Slide 58
- Slide 59
- Slide 60
- Slide 61
- Slide 62
- Slide 63
- Slide 64
- Slide 65
- Slide 66
- Slide 67
- Slide 68
- Slide 69
- Slide 70
- Slide 71
- Slide 72
- Slide 73
- Slide 74
- Slide 75
- Slide 76
- Slide 77
- Slide 78
- Slide 79
- Slide 80
- Slide 81
- Slide 82
- Slide 83
- Slide 84
- Slide 85
Wyszukiwarka
Podobne podstrony:
Elementy Sztucznej Inteligencji
MSI-program-stacjonarne-15h-2011, logistyka, semestr IV, sieci neuronowe w log (metody sztucznej int
Ściąga ze sztucznej inteligencji(1), uczenie maszynowe, AI
wprowadzenie do sztucznej inteligencji-wyk łady (10 str), Administracja, Administracja, Administracj
system ekspercki i sztuczna inteligencja word 07
NARZĘDZIA SZTUCZNEJ INTELIGENCJI
Indukcja drzew decyzyjnych, Robotyka, Metody sztucznej inteligencji
MSI oprac, Mechatronika, Metody Sztucznej Inteligencji, msi materiały
Roboty będą posiadały własną sieć internetową RoboEarth, SZTUCZNA INTELIGENCJA, ROBOTYKA, ROBOTYKA
msi2, Automatyka i Robotyka, Semestr 4, Metody sztucznej inteligencji
PODWALINY SZTUCZNEJ INTELIGENCJI W ASPEKCIE KONTAKTU WIZUALNO GŁOSOWEGO
Projekt I Sztuczna Inteligencja, Sprawozdanie, Techniczne zastosowanie sieci neuronowych
Inteligencja prezentacja ppt
Sztuczna inteligencja w edukacji
Inteligencja prezentacja
Metody sztucznej inteligencji
sciaga msi, Automatyka i Robotyka, Semestr 4, Metody sztucznej inteligencji
msi ściąga test, Automatyka i Robotyka, Semestr 4, Metody sztucznej inteligencji
Sztuczna inteligencja wykad, informatyka, Inteligencja
więcej podobnych podstron