Wyrównanie sieci niwelacyjnej
Metoda pośrednicząca i metoda grupowa
1. Wstęp
–
Co to jest sieć niwelacyjna
–
Po co ją się wyrównuje
–
Co chcemy osiągnąć
2. Metoda pośrednicząca
Mamy sieć składającą się z szeregu punktów. Niektóre z nich są tzw. punktami stałymi (np.
osnowa) – w naszym przykładzie będą to punkty 101, 102. Punkty, których wysokości nie znamy to
punkty 1, 2, …, 8.
Na tej sieci wykonano pomiary, które są jednak obarczone błędami. Mamy 19 pomiarów, które
oznaczymy przez N:(A-B) co oznacza pomiar nr N określający różnicę wysokości pomiędzy
punktami A i B (o ile punkt B jest wyższy niż A), na przykład 1:(101-1).
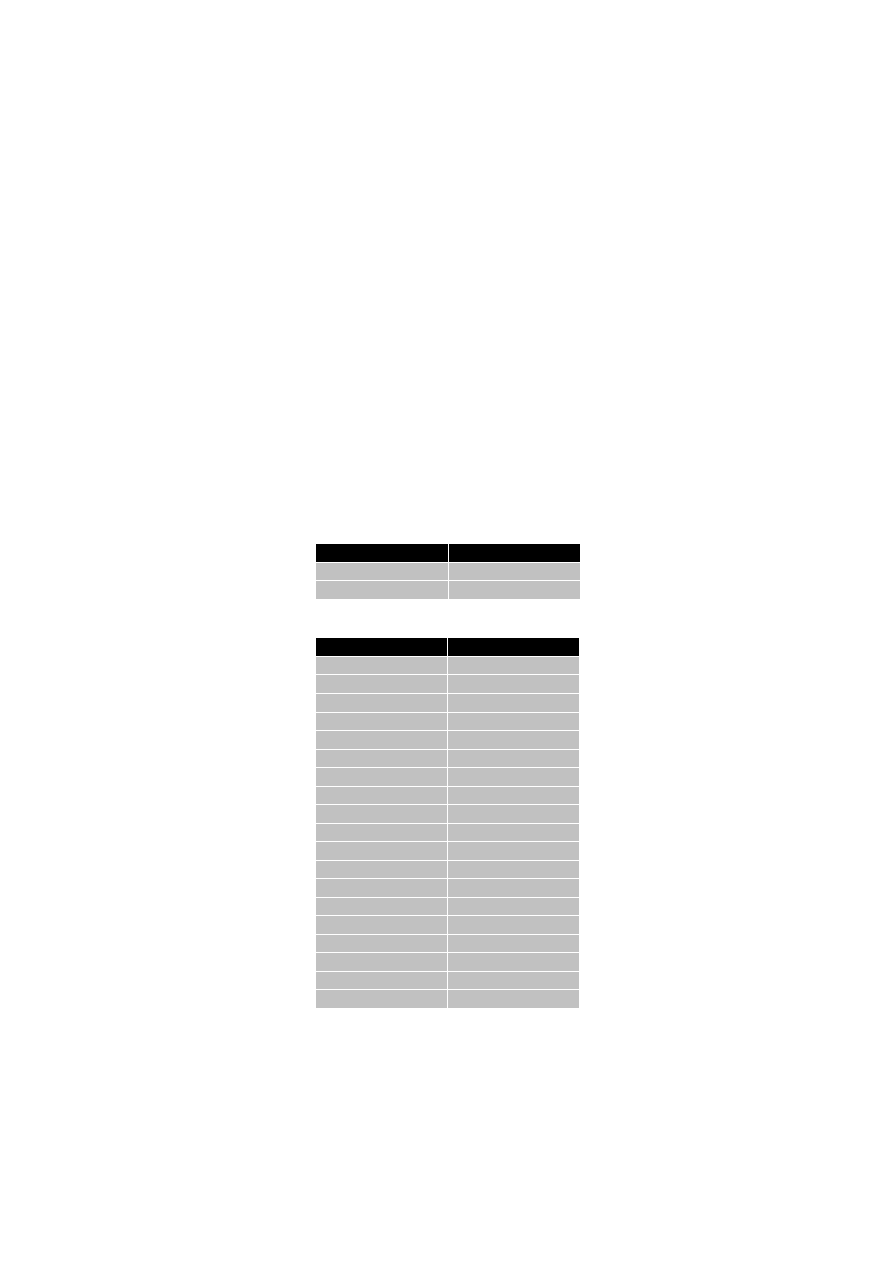
Dane do rozważanego niżej przykładu mają postać następującą:
Nr-pkt
Y
101
100
102
101
Tabela 1: Wysokości punktów stałych
Obserwacja
N:(AB)
Wartość
h_AB
1:(101-1)
2,998
2:(101-2)
1,998
3:(101-3)
-1,008
4:(102-4)
-2,998
5:(102-5)
0,501
6:(102-6)
1,502
7:(102-7)
0,296
8:(102-8)
1,095
9:(7-1)
1,705
10:(7-2)
0,706
11:(3-7)
2,3
12:(8-3)
-3,096
13:(4-7)
3,302
14:(1-2)
-1,002
15:(6-4)
-4,501
16:(6-8)
-0,403
17:(5-4)
-3,507
18:(3-1)
4,003
19:(5-6)
0,996
Tabela 2: Wartości poszczególnych obserwacji
2.1. Wyznaczenie początkowych przybliżeń
Na początek musimy wyznaczyć początkowe przybliżenie poszczególnych wysokości. Można to
osiągnąć wybierając obserwacje, w których występują wszystkie punkty. Ponieważ jednak pewne
punkty są określone dokładnie, słusznie będzie wykorzystać do tego celu pierwsze 8 obserwacji.
Mamy zatem początkowe przybliżenia punktów określone na podstawie pierwszych ośmiu operacji:
Nr-pkt.
wys zaokr.
101
100
102
101
1
102,998
2
101,998
3
98,992
4
98,002
5
101,501
6
102,502
7
101,296
8
102,095
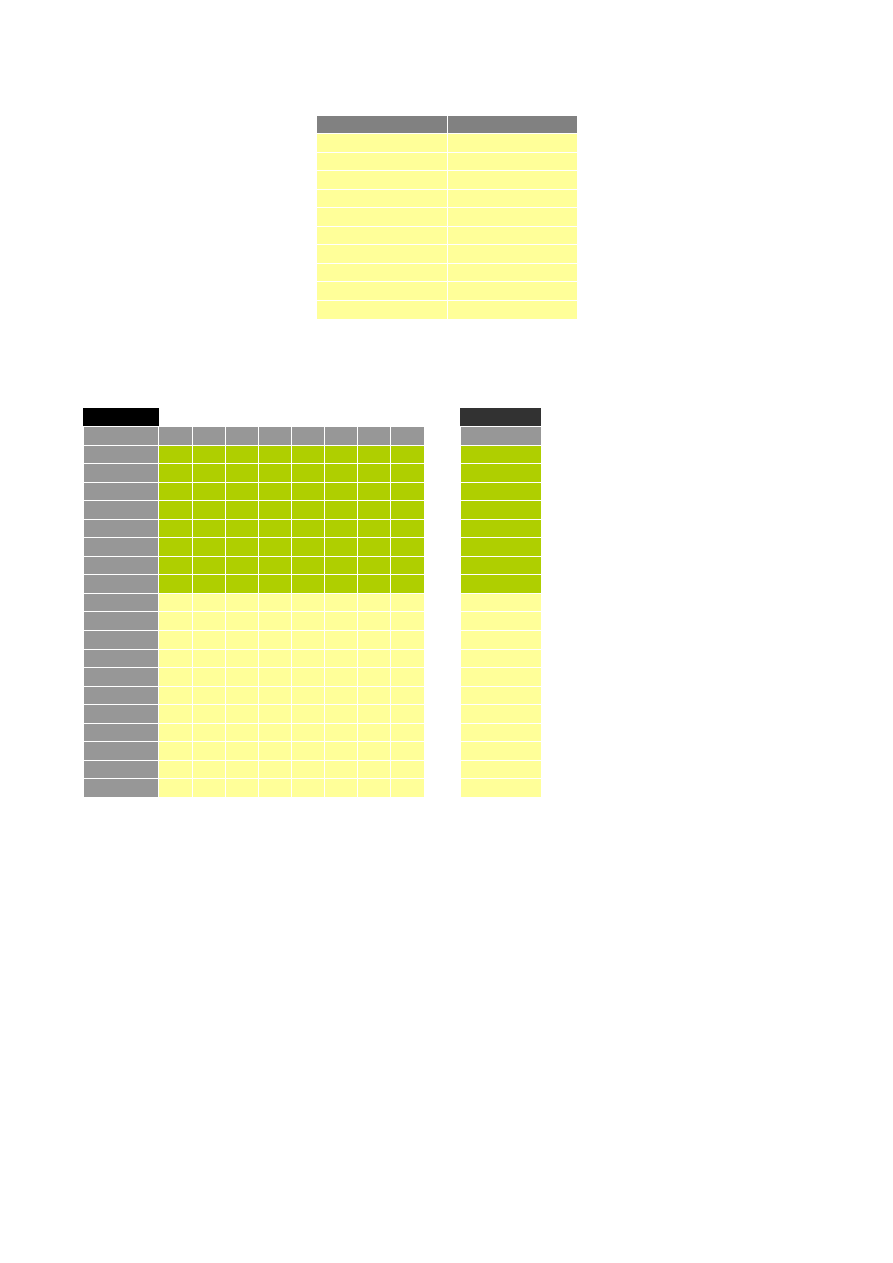
Tabela 3: Początkowe przybliżenia wysokości punktów
Poszczególne obserwacje zapiszmy w postaci macierzy A następującej postaci, do której dołączymy
wektor L:
A
L
obs.\pkt.
1
2
3
4
5
6
7
8
h2-h1-h12
1:(101-1)
1
0,000
2:(101-2)
1
0,000
3:(101-3)
1
0,000
4:(102-4)
1
0,000
5:(102-5)
1
0,000
6:(102-6)
1
0,000
7:(102-7)
1
0,000
8:(102-8)
1
0,000
9:(7-1)
1
-1
-0,003
10:(7-2)
1
-1
-0,004
11:(3-7)
-1
1
0,004
12:(8-3)
1
-1
-0,007
13:(4-7)
-1
1
-0,008
14:(1-2)
-1
1
0,002
15:(6-4)
1
-1
0,001
16:(6-8)
-1
1
-0,004
17:(5-4)
1
-1
0,008
18:(3-1)
1
-1
0,003
19:(5-6)
-1
1
0,005
Tabela 4: Macierz współczynników A i wektor L
Wektor L jest to różnica pomiędzy wartościami zmierzonymi (por. tabela 2), a obliczonymi na
podstawie początkowych przybliżeń punktów. Pierwsze 8 wierszy zaznaczono kolorem zielonym,
gdyż tam wektor L musi mieć wartości zerowe – na podstawie tych obserwacji wyznaczone zostały
początkowe przybliżenia, zatem jeśli te wartości byłyby niezerowe, świadczy to o popełnionym
błędzie!
Każdy z punktów (za wyjątkiem stałych) ma wysokość obarczoną pewnym błędem, którego nie
znamy. Zatem dla przykładu wysokość punktu 1 jest równa h1 + dh1, gdzie dh1 jest popełnionym
błędem początkowego przybliżenia. Mamy zatem np. dla obserwacji 9:(7-1) następujące równanie:
h
1
dh
1
– h
7
dh
7
≈
h
71
, które przekształcić można do
dh
1
−
dh
7
h
1
– h
7
−
h
71
=
dh
1
−
dh
7
l
9
=
v
9
0 , gdzie v9 jest tzw. poprawką 9 równania.
W postaci macierzowej całość równania wygląda następująco:
A⋅dh L=V 0
Dążymy do minimalizacji sumy kwadratów poprawek, zatem po przekształceniu mamy
A
T
A⋅dh=−A
T
L więc dh= A
T
A
−
1
−
A
T
L .
3. Metoda grupowa
Jeśli możemy podzielić wszystkie punkty na 3 grupy o następujących własnościach:
–
grupa nie ma żadnego połączenia (obserwacji) pomiędzy grupą 1 i 2
–
grupa 3 jest tzw. grupą łączną i są połączenia pomiędzy grupami 1 i 3, oraz 2 i 3
–
połączenia z punktami stałymi są nieistotne (mogą być z każdej z grup)
to możemy zrównoleglić obliczenia posługując się metodą grupową.
Na przykładzie z poprzedniego ćwiczenia:
–
Do grupy 1 zaliczamy punkty 1, 2, 3
–
Do grupy 2 zaliczamy punkty 4, 5, 6
–
Do grupy 3 zaliczamy punkty 7, 8
x1
x2
x3
x4
x5
x6
x7
x8
L
1
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
1
0
0
0
0
0
-1
0
-0,003
0
1
0
0
0
0
-1
0
-0,004
0
0
-1
0
0
0
1
0
0,004
0
0
1
0
0
0
0
-1
-0,007
-1
1
0
0
0
0
0
0
0,002
1
0
-1
0
0
0
0
0
0,003
0
0
0
1
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
-1
0
0
1
0
-0,008
0
0
0
1
0
-1
0
0
0,001
0
0
0
0
0
-1
0
1
-0,004
0
0
0
1
-1
0
0
0
0,008
0
0
0
0
-1
1
0
0
0,005
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
1
0
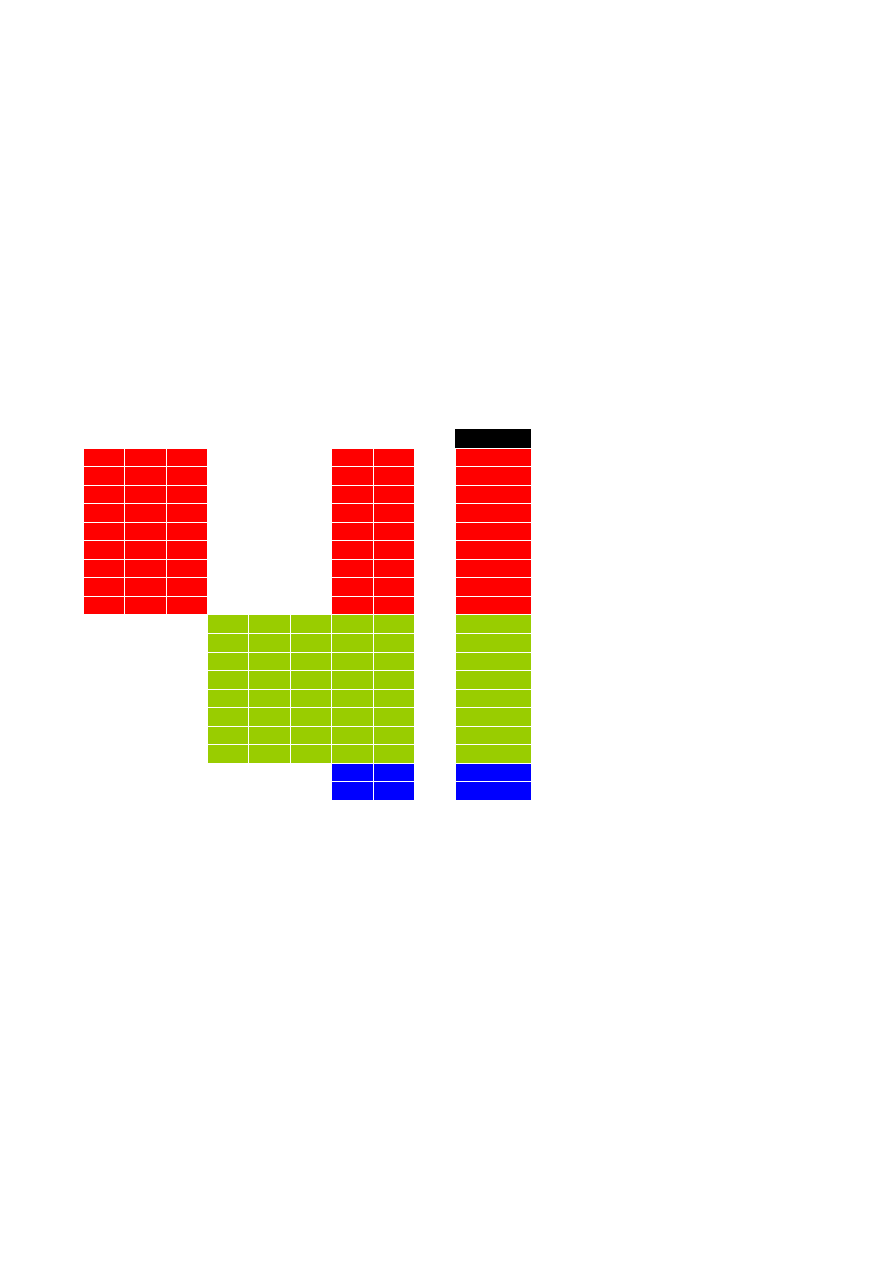
Tabela 5: Macierz A z podziałem na grupy
Tabela 5 przedstawia macierz z podziałem na poszczególne grupy.
UWAGA! Macierz musi wyglądać tak, jak powyżej – w szczególności pola, które pozostawiono
białe muszą być zerami! Jakakolwiek inna wartość w tym miejscu świadczy o błędnym podziale na
grupy!
=
33
23
22
13
11
0
0
0
0
a
a
a
a
a
A
=
3
2
1
l
l
l
L
=
3
2
1
x
x
x
x
Następnie każdy z fragmentów (czerwony, zielony, niebieski) rozwiązujemy metodą pośredniczącą,
ale nie do końca. Wyznaczamy macierze ATA, oraz -ATL osobno!
Dlaczego? Otóż okazuje się, że jeśli macierz A ma postać jak powyżej, to ATA (dalej oznaczmy
jako U) ma uproszczoną postać podobnie, jak -ATL (ozn. b):
=
C
a
a
a
a
a
a
a
a
a
a
a
a
U
T
T
T
T
T
T
22
23
11
13
23
22
22
22
13
11
11
11
0
0
33
33
23
23
13
13
a
a
a
a
a
a
C
T
T
T
+
+
=
−
−
=
D
l
a
l
a
b
T
T
2
22
1
11
3
33
2
23
1
13
l
a
l
a
l
a
D
T
T
T
−
−
−
=
Wracając do praktycznych obliczeń.
Dla grupy 1 mamy:
A
x1
x2
x3
x7
x8
L
1
0
0
0
0
0
0
1
0
0
0
0
0
0
1
0
0
0
1
0
0
-1
0
-0,003
0
1
0
-1
0
-0,004
0
0
-1
1
0
0,004
0
0
1
0
-1
-0,007
-1
1
0
0
0
0,002
1
0
-1
0
0
0,003
Zatem:
ATA
-ATL
x1
4
-1
-1
-1
0
0,002
x2
-1
3
0
-1
0
0,002
x3
-1
0
4
-1
-1
0,014
x7
-1
-1
-1
3
0
-0,011
x8
0
0
-1
0
1
-0,007
W tym miejscu stosujemy metodę eliminacji Gaussa tak, aby doprowadzić do macierzy
jednostkowej po lewej stronie na górze, ale tylko dla elementów pierwszej grupy. Zatem:
x1
1
-0,25
-0,25
-0,25
0
0,0005
x2
0
2,75
-0,25
-1,25
0
0,0025
x3
0
-0,25
3,75
-1,25
-1
0,0145
x7
0
-1,25
-1,25
2,75
0
-0,0105
x8
0
0
-1
0
1
-0,007
x1
1
0 -0,27273
-0,36364
0
0,000727273
x2
0
1 -0,09091
-0,45455
0
0,000909091
x3
0
0 3,727273 -1,36364
-1
0,014727273
x7
0
0 -1,36364 2,181818
0
-0,009363636
x8
0
0
-1
0
1
-0,007
x1
1
0
0 -0,46341
-0,07317
0,001804878
x2
0
1
0
-0,4878 -0,02439
0,001268293
x3
0
0
1 -0,36585
-0,26829
0,00395122
x7
0
0
0 1,682927 -0,36585
-0,00397561
x8
0
0
0 -0,36585 0,731707
-0,00304878
Tabela 6: Kolejne kroki metody Gaussa
Zaznaczone na szaro elementy będą nam potrzebne do wyznaczenia
elementu E. Równy jest on
33
33
23
1
22
23
23
23
13
1
11
13
13
13
a
a
u
u
u
a
a
u
u
u
a
a
E
T
T
T
T
T
+
−
+
−
=
−
−
Licząc natomiast ręcznie, musimy dodać to pole do analogicznego z grupy
2 (niżej) i do (a_33^T)a_33. Analogicznie wyznaczamy wektor F (z tym,
że tutaj mnożymy aTl) biorąc zacienione wektory. Teoretycznie
wyznaczyć go można jako:
Analogicznie dla grupy 2:
A
x4
x5
x6
x7
x8
L
1
0
0
0
0
0
0
1
0
0
0
0
0
0
1
0
0
0
-1
0
0
1
0
-0,008
1
0
-1
0
0
0,001
0
0
-1
0
1
-0,004
1
-1
0
0
0
0,008
0
-1
1
0
0
0,005
ATA
-ATL
4
-1
-1
-1
0
-0,017
-1
3
-1
0
0
0,013
-1
-1
4
0
-1
-0,008
-1
0
0
1
0
0,008
0
0
-1
0
1
0,004
1
-0,25
-0,25
-0,25
0
-0,00425
0
2,75
-1,25
-0,25
0
0,00875
0
-1,25
3,75
-0,25
-1
-0,01225
0
-0,25
-0,25
0,75
0
0,00375
0
0
-1
0
1
0,004
1
0 -0,36364 -0,27273
0
-0,003454545
0
1 -0,45455 -0,09091
0
0,003181818
0
0 3,181818
-0,36364
-1
-0,008272727
0
0 -0,36364 0,727273
0
0,004545455
0
0
-1
0
1
0,004
1
0
0 -0,31429
-0,114285714
-0,0044
0
1
0 -0,14286 -0,142857143
0,002
0
0
1
-0,11429 -0,314285714
-0,0026
0
0
0 0,685714
-0,114285714
0,0036
0
0
0
-0,11429
0,685714286
0,0014
Tabela 7: Metoda pośrednicząca dla grupy 2
Mając już obliczone macierz E i wektor f odwracamy macierz E:
E
f
3,368641
-0,48014
-0,00038
-0,48014 2,417422
-0,00165
E-1
0,305504 0,060678
0,060678 0,425716
Tabela 8: E, f, E^{-1}
2
22
1
22
23
1
11
1
11
13
3
33
2
23
1
13
l
a
u
u
l
a
u
u
l
a
l
a
l
a
F
T
T
T
T
T
T
T
−
−
+
+
−
−
−
=

a następnie przechodzimy do ostatniego etapu. Wyznaczamy x3 = E^{-1}*f
W tym momencie mamy już wyznaczone poprawki do punktów grupy łącznej.
Na ich podstawie wyznaczamy x1 = n1 – cz*x3, gdzie n1 to niebieski wektor z tabeli 6, a cz to
czerwona macierz z tejże. Analogicznie wyznaczamy x2, tylko posługując się danymi z tabeli 7.
Document Outline
Wyszukiwarka
Podobne podstrony:
13 Wyznaczenie glebokosci ulozenia przewodow metoda posrednia
Pomiary wysokiego napiecia przemiennego metodami posrednimi
METROLOGIA, metrologia, Błędy systematyczne w pomiarach metodą pośrednią są obłędy systematyczne wie
Błędy przypadkowe Metoda pośrednia, PWR Politechnika Wrocławska, podstawy metrologii, Wykłady 2011
Metrologia, POPRAWIONE 02 - Pomiary pośrednie. Błędy pomiarów pośrednich., POMIAR DRUGĄ METODĄ POŚRE
51 Wyznaczenie glebokosci ulozenia przewodow metoda posrednia
Metrologia, POPRAWIONE 01 - Pomiary pośrednie. Błędy pomiarów pośrednich., POMIAR DRUGĄ METODĄ POŚRE
Pomiar parametrow podzespolow RLC metodami posrednimi
Metrologia, Pomiary pośrednie. Błędy pomiarów pośrednich., POMIAR DRUGĄ METODĄ POŚREDNIĄ (inny stoż
SPRAWOZDANIE 5 METRO GEO Porównanie niedokładności pomiarów wielkości kątowych metodami pośrednimi —
36 Przedstawić wyrównanie sieci geodezyjnej metodą pośredniczącą na przykładzie sieci niwelacyjnej
13 Wyznaczenie glebokosci ulozenia przewodow metoda posrednia
VI Rachunek przepływów pieniężnych (metoda pośrednia) Ex
Wyrównanie niwelacji metodą pośredniczącą
Analiza dokładności ,metoda pośrednicząca
Rachunek przepływów pieniężnych (metoda pośrednia)
Porównywanie niedokładności pomiarów wielkości kątowych metodami pośrednimi
więcej podobnych podstron