
2 Programowalne sterowniki logiczne (PLC)
2.1 Wstęp
Wiele systemów jest sterowanych za pomocą prostych algorytmów tylko poprzez
wejścia binarne (0 - 1). Wyjściami tych systemów też są przeważnie sygnały binarne. Do
sterowania takich układów projektowane są proste układy elektroniczne. Coraz większe
zastosowanie znajdują elektroniczne układy typu ASIC, umożliwiające zaprogramowanie
złożonych algorytmów. Mikrokomputery nazywane sterownikami programowalnymi lub
programowalnymi sterownikami logicznymi PLC (Programmable Logic Controllers)
stosowane są do sterowania systemów, dla których nie istnieje potrzeba archiwizacji i
wizualizacji danych.
Sterowniki PLC są urządzeniami wszechstronnymi i zwartymi bazującymi na
standardowej architekturze mikroprocesorowej stosowanymi do sterowania maszyn i
procesów [5,6]. Są one zaprojektowane, aby ich programowanie i utrzymanie było proste.
Systemy PLC wymieniły starą logikę przekaźników. Sterowniki programowalny
(programmable controller – PC) jest w następujący sposób definiowany w 1978 przez NEMA
(National Electrical Manufacturers Association) jako:
„urządzenie przetwarzające cyfrowo, które stosuje Pamięć programowalną dla
wewnętrznego zapamiętywania instrukcji implementujących specyficzne funkcje:
logiczne, sekwencyjne, czasowe, zliczające i arytmetyczne do sterowania poprzez
cyfrowe lub analogowe wyjścia”
Zalety systemów PLC
• znaczny wzrost wydajności w porównaniu z logiką przekaźników,
• większa niezawodność,
• mniejsze wydatki na utrzymanie ze względu na brak części poruszających się,
• małe wymiary,
• małe koszty.
Wady sterowników programowalnych
• Wykrywanie błędów bardziej złożone niż w systemach przekaźnikowych,
• Awaria PLC może całkowicie zatrzymać sterowany proces, w konwencjonalnych
awaria zakłócała sterowany proces,
• Zewnętrzne zakłócenia mogą wpływać na zawartość pamięci PLC.
Rozwój systemów programowalnych sterowników logicznych rozpoczął się na początku
lat siedemdziesiątych i trwa do dziś. Na świecie istnieje ponad 100 liczących się firm
produkujących kilkaset modeli sterowników PLC. Największe znaczenie w produkcji i
zastosowaniu mają USA, Niemcy, Japonia i Francja. Większość firm produkuje sterowniki w
różnych klasach wielkości, z bogatym wyposażeniem wspomagającym programowanie,
testowanie i uruchamianie systemów. Istotnym zagadnieniem jest szybkie uzyskiwanie
prawidłowo działających programów.
Sterowniki spełniają szereg dodatkowych wymagań, których nie spełniają komputery
biurowe. Zaostrzone wymagania dotyczą zakresu temperatury pracy, wilgotności, odporności na
drgania i wstrząsy, zapylenie itp.
W systemach sterowania stosowany jest różny sprzęt komputerowy. Zwykle najniższy
poziom struktury sterowania bazuje na sterownikach programowalnych. W krajach wysoko
uprzemysłowionych programowalne sterowniki logiczne PLC (Programmable Logic Controllers)
są podstawowym środkiem sterownia i automatyzacji wszelkiego typu maszyn i urządzeń
technologicznych o binarnej strukturze funkcjonowania, takich jak obrabiarki, prasy wtryskarki
tworzyw sztucznych, linie zgrzewania, urządzenia do transportu technologicznego, urządzenia do
pakowania, urządzenia malarskie i galwanizerskie, urządzenia mieszająco - dozujące, sortujące,
ważące, itp. Stosuje się je także do automatyzacji całych procesów technologicznych w
hutnictwie, energetyce, przemyśle spożywczym, chemicznym, materiałów budowlanych itp.
2.2 Własności sterowników programowalnych
Sterownik programowalny PLC jest urządzeniem bazującym na mikroprocesorze,
posiadającym dodatkowo pamięć oraz urządzenia wejścia-wyjścia. Te elementy stanowią
integralną część sterownika. Zwykle Sterownik posiada połączenie do urządzenia
programującego i monitorującego.
W zależności od wielkości sterownika części składowe znajdują się w jednej zwartej
jednostce lub są rozproszone. Mały sterownik posiada do 40 połączeń wejść-wyjść, duży
natomiast ponad 128 połączeń lokalnych lub zdalnych z wieloma możliwościami stosowania
rozszerzeń.
System rozproszony na moduł CPU/pamięć, moduły wejścia-wyjścia (I/O racks) i odległe
moduły, które mogą być oddalone nawet o setki metrów od modułu głównego. Duże jednostki
PLC posiadają również moduły analogowe wejścia-wyjścia i możliwość użycia programów
wspomagających złożone operacje nie występujące w sterownikach przekaźnikowych.
Podstawową różnicą pomiędzy PLC a innymi urządzeniami mikroprocesorowymi, jest to
że zaprojektowane są dla środowiska przemysłowego. Np. stosują ekranowanie w celu
zabezpieczenia przed zakłóceniami elektrycznymi. Modularna budowa PLC umożliwia łatwą
wymianę i dodawanie modułów. Wspomagają standaryzowane połączenia i poziomy sygnałów i
są zaprojektowane dla łatwego zaprogramowania przez osoby nie znające języków
programowania.
Pamięć PLC dzieli się na pamięć programu zawartą w EPROM/ROM i pamięć
operacyjną. Pamięć RAM jest wykorzystywana do wykonywania programu i jako pamięć
chwilowa dla zapamiętywania danych wejściowych i wyjściowych. Typowa wielkość pamięci
stosowanej w sterownikach wynosi około 1KB dla małych sterowników, kilka KB dla średnich i 10-
20KB dla większych sterowników w zależności od potrzeb. Dla większości sterowników możliwe
jest zwiększanie pamięci w sposób prosty.
Urządzenia wejścia-wyjścia stanowią sprzęg pomiędzy zewnętrznymi procesami.
Urządzenia PLC są typowymi urządzeniami logicznymi, bazującymi na napięciu 5v. Ponieważ
zewnętrzne procesy wymagają większych mocy i napięć, dlatego moduły I/O są izolowane w
sposób optyczny lub inny. Typowe napięcie przetwarzania sterowników należy do zakresu 5V -
240V, prądy z zakresu 0.1A do kilku A, co nie powoduje konieczności dołączania dodatkowych
urządzeń dopasowujących.
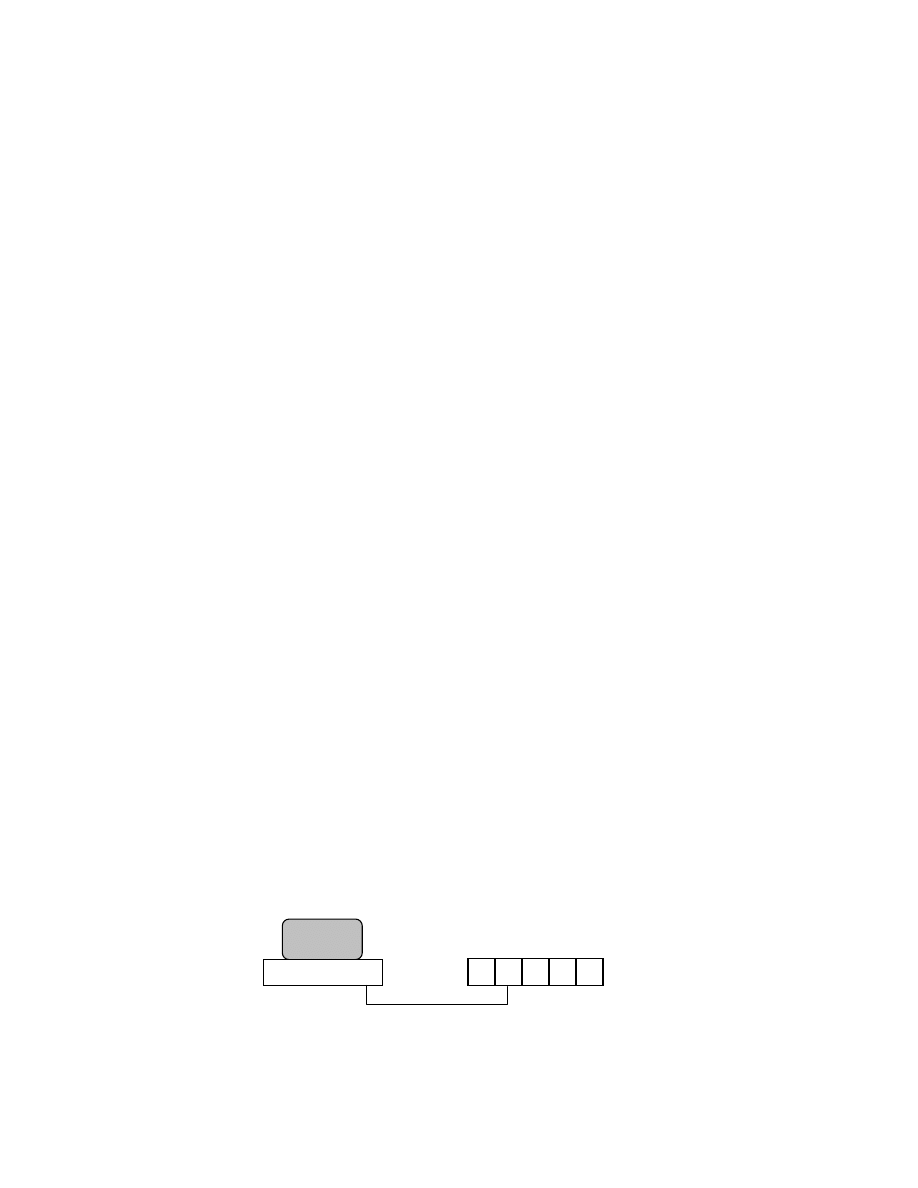
Przy programowaniu sterowników stosowany jest zwykle system skrośny (rys. 2.1). W
systemie tym programy są tworzone na komputerze głównym (zwykle jest to komputer PC z
systemem Windows), następni kompilowane. Program skompilowany jest ładowany na sterownik
programowalny. To samo łącze, po którym jest ładowany program wynikowy, może być użyte do
śledzenia wykonania programu na sterowniku, a sterownik od tej pory pracuje samodzielnie.
PC- Komputer główny
Łącze szeregowe
PLC
Rys. 2.1. System skrośny programowania sterowników.

2.2.1 Zasada
działania sterowników programowalnych
Programowalne sterowniki logiczne, najogólniej definiując, mają strukturę komputerów
uniwersalnych, lecz zorientowane są na procesy sterowania logicznego. Wynikają stąd dwie
podstawowe ich własności: programowanie zadań odbywa się z wykorzystaniem specjalnych
języków zorientowanych na zapis funkcji logicznych, a ich budowa jest dostosowana do
bezpośredniego połączenia ze sterowanym obiektem. Wykonywanie programu sterowania polega
na szeregowo-cyklicznym przetwarzaniu rozkazów programu. Kolejne rozkazy są wykonywane
szeregowo jeden po drugim, a po wykonaniu wszystkich cykl jest powtarzany, niezależnie od
przebiegu sterowanego procesu technologicznego. Cykl powtarzania programu jest na tyle
szybki, że sterowany obiekt reaguje na związki logiczne pomiędzy jego wejściami a wyjściami,
wynikające z algorytmu jego pracy, tak jakby były one realizowane równolegle w czasie
rzeczywistym.
Bloki
układów wejścia/wyjścia służą do elektrycznego dopasowania sygnałów
dwustanowych, pochodzących ze sterowanego obiektu i wysyłanych przez sterownik do obiektu
sterowanego. Bloki te realizują również separację galwaniczną sterownika od obiektu
sterowanego, zmniejszając zagrożenie przed uszkodzeniem i przed zakłóceniami elektrycznymi
systemu sterowania. Układy wejścia/wyjścia umożliwiają bezpośrednie podłączenie sterownika
do obiektu sterowanego.
•
•
•
•
•
Sterowniki PLC mogą być wyposażone w różne rodzaje pamięci (rys. 2.2):
DRAM (dynamic RAM) – W pamieciach DRAM dane przechowywane są w komórkach
pamięci o charakterze pojemnościowym, wymagających okresowego odświeżania w celu
utrzymania zawartości komórki. Pamięci tego typu są wolniejsze ze wzgldu na
konieczność odświeżania, a czas dostępu wynosi przeciętnie 50-60 ns. Wymagane jest
zasilanie bateryjne do utrzymania zawartości takich pamięci po wyłączeniu prądu.
SRAM (static RAM) – Pamięci statyczne pracują na zasadzie przerzutników, dane w nich
pozostają tak długo dopóki się do niej zapisze nowe dane. Pamięci te cechują się
szybkim czasem dostępu rzędu 10-20ns.
ROM (Read Only Memory) jest pamięcią, której zawartość można tylko odczytać i nie
ulega zniszczeniu przy wyłączeniu zasilania. W pamięciach takich przechowywane są
części lub cały system operacyjny.
EPROM (Erasable Programmable Read Only Memory) – jest pamięcią typu ROM, której
zawartość można zmienić stosując pewne dodatkowe środki. Polega to zwykle na
wystawieniu tego układu zawierającego okno kwarcowe na układzie na działanie
promieni ultrafioletowych.
EEPROM (Electricaly Erasable Programmable Read Only Memory) – jest pamięcią typu
ROM, której zawartość można zmienić przy użyciu elektrycznych impulsów.
Większość sterowników programowalnych jest dostosowanych do przechowywaniu programu
aplikacji w tego typu pamięciach. Użytkownik za pomocą programatora zapisuje program
wynikowy do tego typu pamięci, a następnie dokonuje wymiany starych układów pamięci z
poprzednią wersją na układy pamięci z nową wersją. Pamięci EPROM i EEPROM zachowują
program i wszystkie dane, także w przypadku zaniku zasilania.
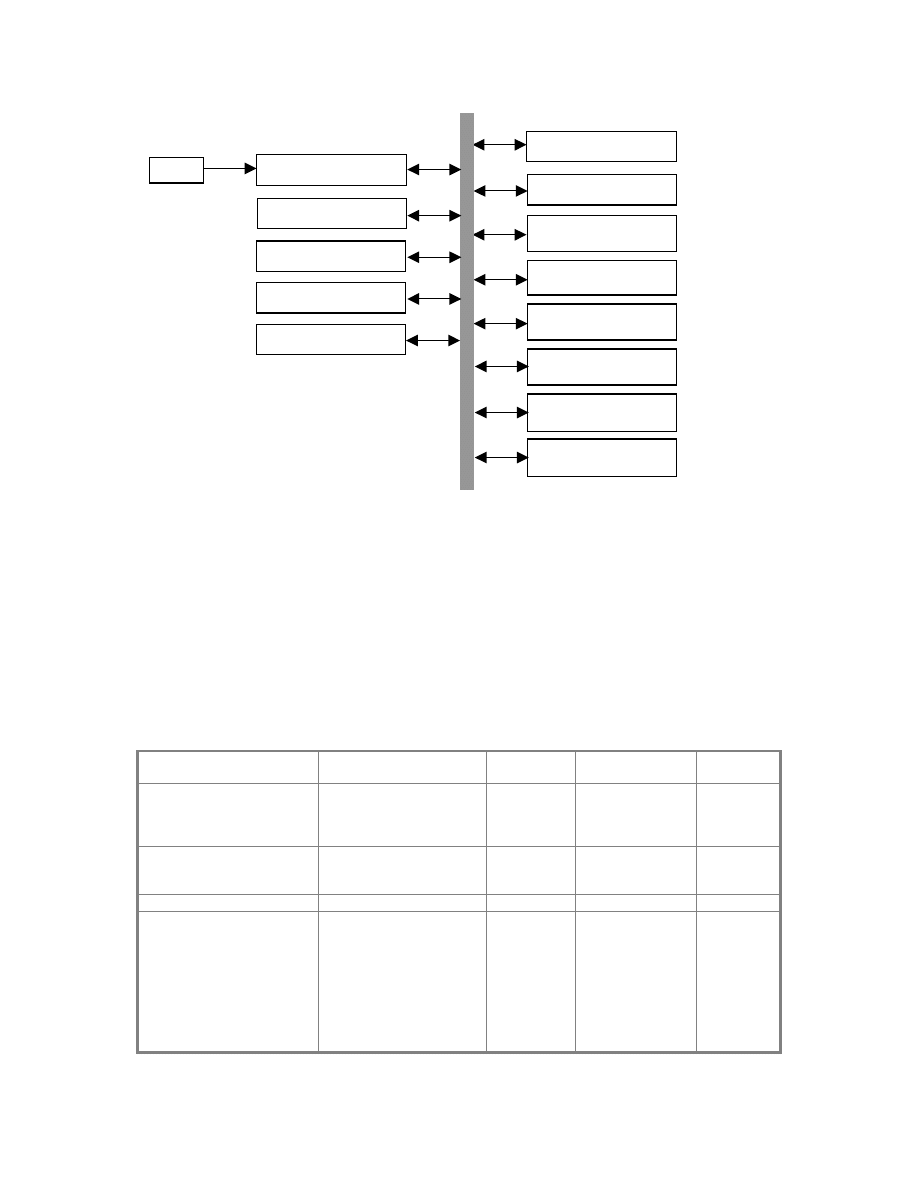
zegar
drugi CPU
drugi CPU
drugi CPU
drugi CPU
CPU
Wejście – napięcie DC
sprzęg syfrowy
Sprzęg
Licznika impulsów
Sprzęg
Cyfrowo-analogowy
Sprzęg
analogowo-cyfrowy
Wejście – napięcie AC
spzęg cyfrowy
Sprzęg
Wyjść przekaźnikowych
Łącze szeregowe
Łącze konsoli
magistrala
(adresowa, danych i sterowania)
Rys. 2.2. Podstawowa struktura sterownika programowalnego.
2.2.2 Parametry sterowników programowalnych.
W tabeli 2.1 zawarto ważniejsze parametry [3] wybranych producentów sterowników
programowalnych. Jedną z charakterystycznych cech sterowników jest liczba wejść i wyjść
cyfrowych. W większości zastosowań wystarcza niewielka liczba takich wejść i wyjść. Ponieważ
program typowego sterownika polega na cyklicznym wykonaniu tego samego ciągu instrukcji,
dlatego szybkość sterownika programowalnego określana jest przez czas wykonania tysiąca
instrukcji. Proste programy sterownika nie zajmują zbyt dużo miejsca w pamięci, dlatego typowe
sterowniki wyposażane są w mniejszą pamięć RAM niż komputery osobiste.
Firma
Typ
I/O
Szybkość czas
dla 1000 instrukcji
RAM
Allen-Bradley
Micrologix 1000
SLC 500
PLC-5
PLC-5/250
16-32
20-960
128-3072
do 4.1K
do 2ms
0.5-8ms
<1ms
<1ms
do 1Kb
1K-24Kb
8K-100Kb
do 8Mb
GE Fanuc Automation
90 Micro
Seria 90-30
Seria 90-70
14
1K
12K
1ms
0.18ms
0.4ms
6Kb
80Kb
512Kb
PEP Modular Computers
Smart I/O
8-88
3Mb
Siemens
Simatic S5-90U
Simatic S5-95U
Simatic S5-100U
Simatic S5-115U
Simatic S5-135U/155U
Simatic TI500/TI505
Simatic S7-200
Simatic S7-300
Simatic S7-400
14-208
32-480
do 448
do 2K
32.8K
8.2K
64
1024
128K
2ms
2ms
0.8ms
0.1ms
0.18ms
0.06ms
0.8ms
0.3ms
0.08ms
4Kb
20Kb
20Kb
384Kb
1664Kb
1920Kb
4Kb
48Kb
512Kb
Tab. 2.1. Podstawowe parametry wybranych sterowników PLC.
Sterowniki mogą być przeznaczone nie tylko do wykonywania prostych operacji. Tabela 2
podaje różne rodzaje operacji, które mogą być realizowane przez sterowniki: r - zadania czasu
rzeczywistego, m - wielozadaniowość, II - moduły do obliczeń równoległych, f - obliczenia
zmiennoprzecinkowe, pid - sterowanie typu PID, fz - logika fuzzy.
Programowanie sterowników nie musi być realizowane na poziomie bliskim maszynie.
Świadczy o tym coraz bogatsze oprogramowanie oferowane dla sterowników programowalnych.
W tab. 2.2 podawane są następujące typy oprogramowania: tr - pakiety treningowe, pc -
oprogramowanie komputerów osobistych (PC), iec- zgodność z IEC1131 dla wszystkich
wariantów, f - bloki funkcyjne, i - schematy drabinkowe, l - lista instrukcji, s - schematy przebiegu
sekwencji instrukcji, h - programator przenośny.
Coraz
większe wymagania związane są integracją sterownika z otoczeniem. Sterowniki
wyposażone są w różne sprzęgi umożliwiające transmisję danych. W tabeli 15.2 podano typy
łączy komunikacyjnych: e - Ethernet i jego odmiany, a - ARCnet, f -FIP, c - CAN, p-Profibus, l -
LONWorks, m - Modbus, m+ - Modbus+, s - Interbus-S, d - DeviceNet, as - ASInet, fo -
światłowody (fibre optics), r - fale radiowe.
Stosowane
są rozwiązania bazujące na języku naturalnym, przykładem może być
narzędzie CASE firmy Siemens o nazwie APT, którego celem jest zapewnienie prostoty
programowania sterowników.
Typ Operacje
Programowanie
Transmisja
Micrologix 1000
SLC 500
PLC-5
PLC-5/250
r
r,f,pid
r,f,pid,dmr
r,m,II,f,pid,dmr
pc, l, h
tr,pc,l,s,h
tr,pc,l,i,s,h
pc,l,s
m,d,fo,r
e,p,m,f,fo,r
e,m,d,fo,r
90 Micro
Seria 90-30
Seria 90-70
r,pid
r,pid,II
r,m,II,f,fz,pid,d/tmr
tr,pc,iec,l,i,h
tr,pc,iec,l,i,s,h
tr,pc,iec,l,s
m
e,f,c,m,d,s,d,r
e,f,p,m,s,d,sd,fo,r
Smart I/O
r,m
tr,pc,iec
p,m,d
Simatic S5-90U
Simatic S5-95U
Simatic S5-100U
Simatic S5-115U
Simatic S5-135U/155U
Simatic TI500/TI505
Simatic S7-200
Simatic S7-300
Simatic S7-400
r
r,fz
r,fz
r,f,pid,d,fz
r,f,II,pid,d,fz
r,f,pid,d
r
r,f,pid,fz
r,II,f,pid,fz
tr,pc,f,l,i,s,h
pc,f,l,i,s,h
pc,f,l,i,s,h
p,c,f,l,i,s,h
pc’C’,f,l,i,s,h
pc,l,i,APT
tr,pc,iec,l,i
tr,pc,iec,f,l,i,s
pc,iec,fl,is
as,m
p,m,as
as,m
e,p,m,m+,as,fo
e,p,m,m+,as,fo
a,p,m,m+,as,fo
RS485,ascii
p,as,fo,m+,RS485
e,p,as,fo,m,RS485
Tab. 2.2 Parametry wybranych sterowników PLC.
2.2.2 Metody programowania sterowników
Dla
języków programowania sterowników PLC opracowano standardy IEC
(International Electrotecnical Comission). Istnieje pięć podstawowych metod konstrukcji
oprogramowania sterowników w standardzie IEC 1131-3. Przykładem takiego
zaawansowanego systemu jest pakiet ISaGRAF, który uruchamiany jest pod Windows,
natomiast aplikacje programowe uruchamiane są na rodzinie sterowników PLC typu PEP
9000 w środowisku systemu operacyjnego czasu rzeczywistego OS9. Funkcje pakietu są
dostępne w dwóch trybach pracy, normalnym służącym do konstruowania programu oraz
drugim, służącym do kontroli działania programu. Program posiada procedury testujące oraz
możliwości podglądu wykonania programu w trybie symulacyjnym i na systemie docelowym.
ISaGRAPH posiada pięć języków programowania zgodnych ze standardem
IEC1131 - 3, z których można korzystać na raz w jednym programie. Są to:
•
•
•
•
•
sekwencyjne schematy funkcyjne (SFC - Sequential Function Chart),
bloki funkcyjne (FBD - Function Block Diagramm ),
schematy drabinkowe (LD - Ladder Diagram )
lista instrukcji (IL - Instruction List),
tekst strukturalny (ST - Structured Text ).

2.3 Programowanie sterowników PLC
Programowanie sterowników na poziomie zbliżonym do sprzętu jest realizowane w
sposób prawie jednakowy dla wszystkich sterowników. Dla zrozumienia zasady wykonywania
programów sterowników programowalnych wybrano prosty sterownik firmy Philips. Sterownik ten
bazuje tylko na 31 podstawowych instrukcjach.
2.3.1 Zasady uruchamiania i wykonywania programów PLC
Ze względu na specjalizację i ograniczone możliwości sterowników, nie rozwija się
programów dla sterownika na samym sterowniku. Programowanie dokonywane jest przez
urządzenie zewnętrzne. Może być to proste urządzenie programujące z klawiaturą, zwykle jednak
stosuje się rozwiązanie polegające na stosowaniu systemu uruchomieniowego, służącego do
uruchamiania programów na PLC. Taki system składa się z komputera uniwersalnego o większej
mocy obliczeniowej (na przykład PC) oraz samego PLC. Ponieważ programy dla PLC
opracowywuje się na innym komputerze, a potem - po kompilacji - program przekazywany jest z
komputera do PLC, to taki system uruchomieniowy nazywany jest systemem skrośnym. W
skład oprogramowania takiego systemu wchodzi edytor do pisania programów, kompilator
programów sprawdzający błędy syntaktyczne, program ładujący program skompilowany do
sterownika, program śledzący wykonanie programu na sterowniku (debugger). Systemy skrośne
wyposażane są w symulator sterownika, umożliwiający testowanie programu bez użycia
sterownika.
2.3.2 Budowa programu sterownika
Typowy program sterownika składa się z dwóch części deklaracji zmiennych i części
wykonawczej (rys. 2.3). Część wykonawcza programu składa się z akcji. Wykonanie programu
polega na przechodzeniu od akcji do akcji. Akcję można podzielić na dwie części. Pierwsza z
nich składa się z instrukcji określających czy warunek realizacji działania jest spełniony. Druga
część zawiera instrukcje wykonywane (realizacja działania) w przypadku, gdy warunek realizacji
działania jest spełniony. Jeżeli warunek realizacji działania jest spełniony, to działanie jest
wykonywane, w przeciwnym przypadku następuje przejście do następnej akcji.
Za
realizację programu w sterowniku odpowiedzialny jest system operacyjny sterownika,
który cyklicznie wykonuje sekwencję operacji. Cykl operacji (sweep) polega na realizacji
następujących operacji:
•
•
•
•
•
realizacja wewnętrznych instrukcji PLC ( w tym autodiagnostyka),
pobranie danych wejściowych,
wykonanie programu użytkownika,
wysłanie danych na wyjścia,
obsługa transmisji (przeważnie transmisji po łączu szeregowym).
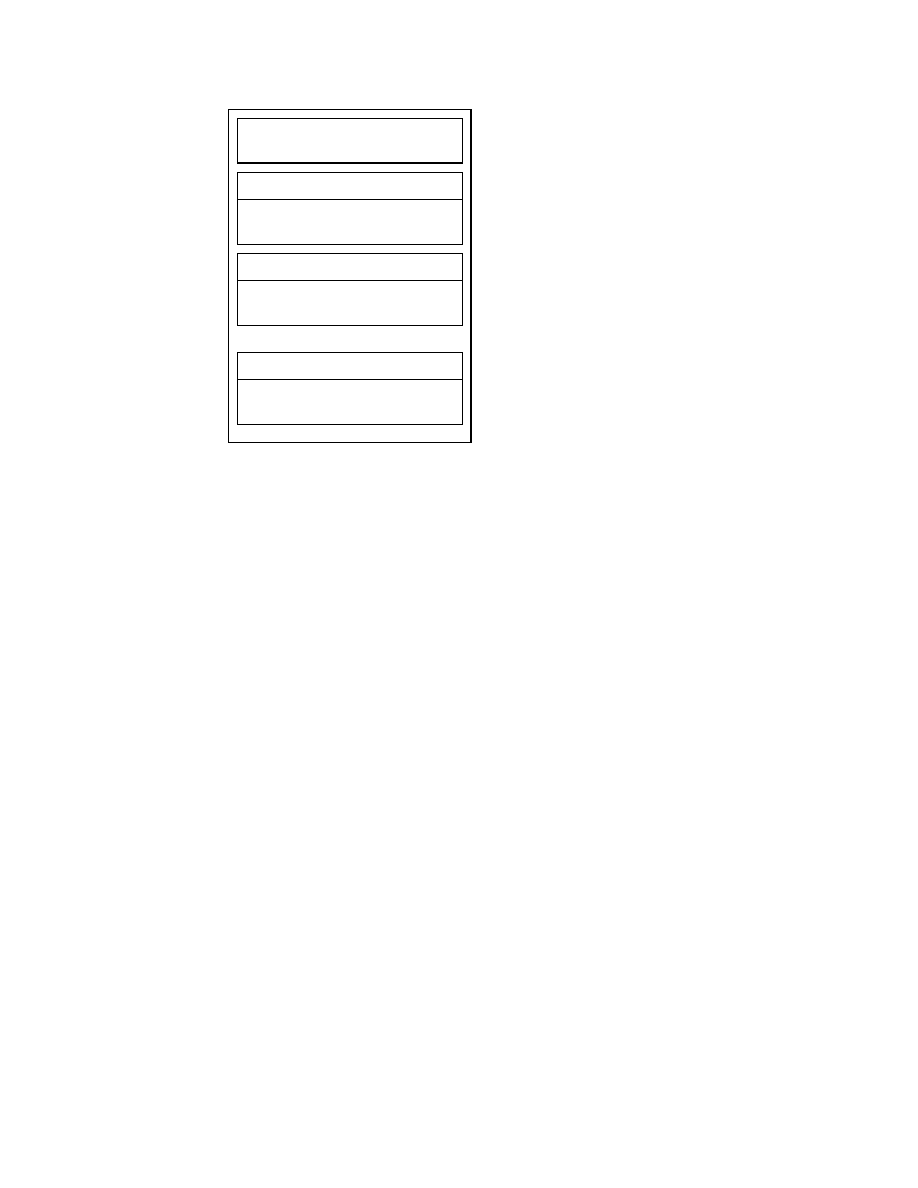
Warunek wykonania działania
Działanie
Warunek wykonania działania
Działanie
Warunek wykonania działania
Działanie
Deklaracja zmiennych
Akcja 1
Akcja N
Akcja-ustalenie stanu początkowego
. . .
Rys. 2.3. Struktura programu sterownika PLC
W sterownikach wyszczególnia się trzy rodzaje pamięci:
1. Segment pamięci z organizacją słowową, zawierający system operacyjny z funkcjami
kontrolnymi oraz oprogramowanie transmisji. Stosowana jest zwykle pamięć typu ROM
(EPROM).
2. Segment pamięci programu użytkownika (1, 2, 64 K słów). Są to zwykle pamięci typu DRAM z
podtrzymaniem bateryjnym lub SRAM.
3. Segment pamięci danych. Przeważnie wydziela się pewną dolną część pamięci do
zapisywania wartości bitowych dla operacji logicznych. Ta część pamięci ma zarazem
organizację bitową i słowową. Pozostała część pamięci ma organizację słowową.
2.3.3 Opis wybranego sterownika
Rozpatrzmy prosty sterownik PLC o nazwie MC31 firmy Philips. Sterownik ten posiada
następujące własności:
- sterownik w zwartej obudowie z możliwością transmisji poprzez magistralę miejscową
(fieldbus).
- 24 wejścia (24 V), optoizolowane, wyświetlanie stanu wejść poprzez LED-y,
- 16 wyjść: (24 V), 300 mA, optoizolowane. wyświetlanie stanu wyjść poprzez LED-y,
- możliwość rozszerzenia wejść i wyjść do 120 I/0,
- 8K pamięci na program CMOS RAM, EPROM, EEPROM,
- 2K 4bitowej pamięci danych,
- możliwość połączenia w sieci poprzez RS 485 i protokół transmisji PPCCOM,
- złącze RS 232 do ładowania programu,
- złącze RS 232 modemowe,
- wyświetlenie stanu baterii, zasilania i komunikacji.
Adresowanie pamięci sterownika
Pamięć sterownika jest podzielona na dwie części, przeznaczone dla danych i programu.
Dane zapisywane są do komórek 4-bitowych. Pierwsza strona pamięci przeznaczona jest do
adresowania zmiennych jednobitowych.
Podział pamięci danych sterownika przedstawia rysunek 2.4 Wartości pod adresami
zarezerwowanymi ustawiane są przez system operacyjny i mogą być wykorzystywane w
programie użytkownika:
0000.0 Przepełnienie arytmetyczne, spowodowane wykonaniem operacji arytmetycznych.
0000.1 Stała równa 1, stosowana w operacjach logicznych jako wartość TRUE.
0000.2 Sygnał alarmu, ustawiany gdy zasilanie spadnie poniżej 17.5 V (nominalne 24 V)
0000.3 Zegar co 0,01 s
0001.0 Zegar co 0,1 s
0001.1 Zegar co 1 s
0001.2 Zegar co 10 s
0001.3 Zegar co 60 s
Wartości zegara wykorzystywane są w operacjach uzależnionych od czasu. Adresy
wejścia-wyjścia służą do odczytania stanu sygnałów wejściowych i do wyprowadzania sygnałów
wyjściowych. Zmienne użytkownika zajmują pozostałą część pamięci danych, przy czym dla
pierwszej strony pamięci zmienne mogą być traktowane jako zmienne jednobitowe lub słowowe,
przy długości słowa wynoszącej 4 bity.
Adresy zarezerwowane
Adresy wejœcia-wyjœcia
Adresy zmiennych 1 i 4 bitowych
512
2
33
Adresy zmiennych 4 bitowych
0
Rys. 2.4. Podział pamięci danych
2.4 Sterowniki programowalne serii PEP 9000
Dla opisu przykładowych sterowników wybrano system nazwany PEP 9000 firmy PEP.
System ten składa się z trzech podstawowych jednostek przetwarzających.
VME9010 lub VME9030 – służące do różnorodnych zastosowań w których wymagana
jest duża moc przetwarzania i bazujące na magistrali VME. Stosowane do rozwiązań
wbudowanych, wizualizacji. Zawierają procesory 68040 i 68060 o szybkości
przetwarzania odpowiednio 100 i 150 MIPS (MIPS – milion operacji na sekundę).
•
•
•
IUC 9000 – sterownik z sprzęgiem CXC wyposażony w procesor 68360 o szybkości
4MIPS
SMART I/O – sterownik o małych rozmiarach stosowany głównie do podłączenia
zadajników i czujników. Sterownik z procesorem 68302 o szybkości 1.5 MIPS.
2.4.1 Sterownik SMART I/O
Sterownik SMART I/O zbudowany jest wokół elementu podstawowego SMART-Base
zawierającego procesor Motorola 68302 (rys. 2.5) z zegarem 20 Mhz, 0.5MB pamięci RAM, 64
KB pamięci SRAM z podtrzymywaniem bateryjnym, 1MB EPROM (opcjonalnie 1MB Flash-
EPROM), izolowany zasilacz 24V DC, złącze sieciowe PROFIBUS (do 500 Kbodów), łącze
szeregowe RS232 (skonfigurowane jako łącze telefoniczne lub modemowe) , izolowany 24
bitowy licznik oraz miejsce do osadzenia trzech dodatkowych modułów SM (Smart Modules).
Natomiast do samego elementu bazowego można dołaczyć maksymalnie 3 elementy
rozszerzające SMART-Ext. Procesor MC68302 jest zbudowany z dwóch procesorów osadzonych
na jednym chipie. Jeden z nich 68HC000 stanowi przemysłowy standard i pracuje przy
częstotilwości 20 MHZ, natomiast drugi jest typowym procesorem o architekturze RISC mającym
zastosowanie do komunikacji. Protokoły sieci przemysłowej używają RISC CPU zwalniając
68HC000 dla innych zadań. Komunikacja pomiędzy procesorem RISC a 68HC000 odbywa się
poprzez dualną pamięć RAM [2].
Użytkownik może programować SMART I/O przy pomocy komputera PC, przy użyciu
pięciu języków PLC (SFC,IL,LD,ST,FBD) lub traktować go jako normalny komputer pracujący pod
systemem czasu rzeczywistego OS-9 lub VxWorks i programować w środowisku
wielozadaniowym przy pomocy C lub Pascala. Wartym podkreślenia jest fakt programowej
kompatybilności SMART I/O z produktami opartymi na VME czy CXC .
zegar
(x3)
DMA
użytkownika
SCC
DMA(x6)
Procesor
Komunikacyjny
RISC
Trzon mikroprocesora MC68000
arbiter
magistrali
selektor
pamięci
pamięć
RAM
równoległe
we/wy
kontroler
przerwań
generator
zegara
Magistrala procesora RISC
porty wejść/wyjść i szeregowy multipleksowany kanał I/F
SCC
Kanał (x2)
SCC
Kanał
SCC
Kanał 3
SCC
Kanał 2
SCC
Kanał 1
Rys. 2.5. Schemat blokowy procesora MC68303
Opis funkcjonalny komponentów
• Logiczny RESET: Układ IC MAX 703 dokonuje przełączanie baterii, kontrolę braku zasilania,
synchronizacja resetu (resetu). Czas trwania cyklu zasilającego wynosi 200 ms. Istnieje
możliwość programowego zerowania (resetowania) sterownika. Przerwanie braku zasilania z
poziomu IRQ7. Sygnał braku zasilania generowany jest zazwyczaj przy 4.7 V, natomiast
przejście w stan oszczędzania energii następuje dla 4.65V.
• Oscylator Profibus-a. Oscylator Profibus-a pracuje z częstotliwością własna 24 MHZ lub 20
MHZ. Częstotliwość ta ma wpływ na prędkość maksymalną PROFIBUSA i synchronizację,
• Generator impulsów. Generowanie impulsów pochodzi od zegara 24 MHZ, dzielnik logiczny
jest wykonany w oparciu o układ PAL EPM7032LC44, natomiast czas trwania impulsu wynosi
10ms. Generator impulsów obsługuje przerwanie IRQ6.
• Generator Cykli ISaGRAF’a (do późniejszego zastosowania). Timer PI/T może być użyty do
generowania fali prostokątnej jako TOUT, sprzężony z PB9 procesora MC68302
8 bitów
we/wy
8 bitów
we/wy
8 bitów
we/wy
Reset
logiki
Oscylator 24Mhz dla
PROFIBUSa
Generator
tiku 10ms
MC68302-
FC20(25)
Generator cyklu ISAGRAFu
0,5 do 10 ms zegar WDOG
64 KB pamięć
zabezpieczająca
SRAM+baterie
68230
PLCC
interfejs
RS232
MODUŁY SMART
we/wy rozszerzające 68302
Izolacja
zegara
interfejs
RS485
DRAM 512 Kb
1 układ 256k*16
logika odświeżalna
(Flash)EPROM
powyżej 2Mb
DC/DC
18-36 V DC
izolowane
5V
1,2A
5V
150mA
złączki
1Kbit EEPROM
Rys. 2.6. Schemat blokowy płytki głównej SMART-Base
• Procesor MC6830. Procesor posiada porty mające następujące znaczenie: Port A - górny
bajt pierwszego SMART - modułu slot 1 (slot #0); równoległe we/wy. Port B - bity 0-2,
sterowanie slotem SM, Port B - bity 4-7,i Port A6, sterowanie EEPROMEM, Port B8 steruje
odświeżaniem pamięci DRAM za pomocą przerwania IRQ4, Port B8 steruje sprzężeniem
pinów PI/TOUT, timery 1 i 2 są używane do PROFIBUSA, natomiast timer 3 pełni rolę
kontrolera
• Pamięć DRAM. Pamięć o pojemności O.5 MB z zakresu $0-$80000, przy czasie odświeżania
10.67
µs, sterowanie przez CPU.
• Pamięć EPROM, FLASH. Pamięć o pojemności 1MB lub 256 KB, adresie $C00000-
$D00000, prędkości 120ns, wybór typu pamięci za pomocą zworek EPROM lub FLASH.
• Pamięć SRAM. Pamięć o pojemności 64 KB, adresie $F000000-$F0100000, prędkości
120ns, charakterze dyskowym I podtrzymaniu bateryjnym.
• Pamięć EEPROM. Pamięć o pojemności 1 KB, dostępie przez Port B4-7 i A7 procesora
68302.

• Procesor PI/T-68230. Adres bazowy $F7000000. PORT B - drugi slot SMART- modułu, 8-
bitowy, równoległe we/wy (slot #1). PORT A - trzeci slot SMART-modułu, 8-bitowy,
równoległe we/wy (slot #2). TIMER -timer interfejsu wejścia-wyjścia. H1-H4 linie wejściowe
IRQ z trzech modułów, przerwanie PI/T poziom IRQ1.
• RS 232. 8 – końcówkowe łącze telefoniczne lub modemowe.
• RS485. Łącze sieci PROFIBUS-a o izolacji 5V/150 mA, interfejs dwużyłowy umożliwia pracę
w trybie duplex.
• Cyfrowe wejście-wyjście. Trzy gniazda modułu SMART. Dodatkowo 8 cyfrowych linii wejść-
wyjść bezpośrednio połączonych do każdego slotu, oraz dodatkowe linie sterujące RESET i
INTERRUPT do każdego gniazda. Zasilanie linii 5V, trzyżyłowy interfejs SPI,SCLK
(wewnętrzna magistrala),SRxD,TRxD podłączony do każdego gniazda w celu wymiany
danych - identyfikujący się adresem ID.
• Timer we/wy. Stosowane są 3 timery wejścia-wyjścia (izolacja 2.5 kV) oraz timer PI/T
używany do funkcji TOUT,TIN. Dodatkowo są zaimplementowane: funkcja bramkująca GATE
funkcję TIN, dioda wejściowa Zenera 8.2 V umożliwia przejścia w stan wysoki powyżej 9V,
wejściowy filtr dolnoprzepustowy dla dwóch 24V linii wejściowych TIN i GATE. Linia TOUT
może generować falę prostokątną 5ms-178ms,przy prądzie max. 500mA przy 24V
• SPI - szeregowy intefrejs rozszerzeń wejść-wyjśc. Interfejs posiada 6 linii wejść-wyjść.
Trójżyłowe linie SPI: SCLK, SRxD, TRxD służą do wymiany danych: zasilanie 5V, są 3 linie
sterujące, RESET, INTERRUPT i Select.
• Przetwornik DC/DC. Przetworniki charakteryzują się częstotliwością przełączania 100 KHZ,
napięciem wejściowym 18-36 V DC. Dwa izolowane wyjścia 5 V z prądem max.1.2A(system)
i 150mA(PROFIBUS), izolacja 500 V DC.
W sterownikach ważną rolę odgrywają układy zegarowe, przy pomocy których realizowane
są instrukcje zegarowe. Instrukcje zegarowe sterują wyjściem sterownika w zależności od
zadanego przedziału czasu. Natomiast instrukcje licznikowe wykonywane są w zależności od
zliczonych impulsów.
Watchdog Timer (układ zegarowy czuwania) – jest to układ, który jest stosowany do
sprawdzania czy program jest nadal wykonywany (nie zawiesił się). W przypadku, gdy program
uległ zawieszeniu dla zadanego okresu czasu, układ ten powoduje zerowanie (resetowanie)
systemu.
Dodatkowe moduły SMART I/O[1]:
• SMART - Ext - element rozszerzający,
• SM-DIN1 - 8 wejść cyfrowych 24 V, izolacja galwaniczna,
• SM-DOUT1 - 8 wyjść cyfrowych 24 V,0.5 A, izolacja galwaniczna ,
• SM-REL1 - 6 wyjść przekaźnikowych do 220 V AC, do 2 A,60 W,
• SM-ACI1- 8 wejść 110/220 VAC,
• SM-AC01- 6 wyjść 110,/220 VAC,
• SM-DAD1 - 4 wejścia,2 wyjścia analogowe 12bit,+-10 V,
• SM-ADC1 - 6 wejść analogowych 12bit,+-10V
• SM-ADC1 - 6 wejść analogowych,0-20mA,
• SM-DAC1 - 2 wyjścia analogowe 12bit,+-10 V,
• SM-DAC1 - 6 wyjść analogowych 12bit,+-10 V,
• SM-DAC1 - 6 wyjść analogowych ,0-20mA,
• SM-THERM - 4 wejścia termopar,16bit,
• SM-PT100 - 4 wejścia PT100 ,trzyżyłowe,16bit,
• SM-RS232 - dodatkowy kanał RS-232C,
• SM-SSI - 1 x SSI,2 we 24 V DC,1 wy 24 V DC/500 mA,
• SM-SCR2-3 złącza pod śrubki 2x3 dla złącza timera 5 kompletów,
• SM-WDG
2.4.2 Sterowniki
IUC9000
Sterowniki IUC9000 (Intelligent Universal Controller) mogą być używane samodzielnie
lub dzięki wbudowanym mechanizmom sieciowym w konfiguracji rozproszonej. Wyposażone są
w interfejs RS-485 i oprogramowanie sieci przemysłowej czasu rzeczywistego PROFIBUS. Moduł
główny rozbudowywuje się dokładając karty rozszerzeń CXM ( Controller Extension Modules)
zależnie od potrzeb. Umożliwia to interfejs CXC (Controller Extension Connector). Sercem
sterownika jest procesor 69302 IMP (Integrated Multiprotocol Processor). Niezależnie od jądra
procesora można wydzielić układ SIB (Systems Integration Block) oraz procesor komunikacyjny
CP (Communications Processor). Oprócz tego na chipie znajdują się 3 szeregowe kanały DMA,
3 timery, kontroler przerwań, jeden uniwersalny kanał DMA i 1152 bajty dualnej pamięci RAM [4].
Podstawowe parametry zawarto w tab. 2.3.
CPU
68302 IMP 16.67 MHZ/20MHZ
Pamięć
max.4 MB SRAM
max. 2 MB EPROM/Flash EPROM
max. 64 KB EEPROM SRAM (opcjonalnie)
Timer
dwa 16-bitowe timery - RTC (zegar)
trzy 16-bitowe timery - MC68302 (CPU)
Zegar
Zegar czasu rzeczywistego - DP8571
(zliczanie godzin, dni, programowany alarm,
okresowe generowanie przerwań)
2 dodatkowe 16-bitowe timery + 44 bajty
SRAM
Łącza szeregowe
RS 232/RS 485
Zużycie energii
<=1.5 W
Zasilanie
5 V (+-5%) 300 mA
Identyfikacja modułu
8 bitowy przełącznik DIP
HW Watchdog
Układ MAX 696 - trigger 400ms
System autoprogramowania wektorów
przerwań przez PB8, PB9, PB10 i PB11
Generator impulsów zegarowych
1 x CXC zegar systemowy - 16MHZ
1 x CPU zegar - 16.67 MHZ
1 x RTC zegar - 32.768 MHZ
1 x SCC zegar - 12/24 MHZ
Diody
zawieszenie (halt) - czerwona
zasilanie (+5 V) - zielona
izolowane zasilanie - zielona
transmisja - zółta
Wtyki
1 x 15 pinów,1 x 9 pinów
Interfejs we/wy
CXC (Controller extension Connector)
DIN 41612,96 pinów
Zakresy temperatur
Standardowy (od 0
°C do +70°C)
Wilgotność
od 0% do 95% (bez kondensacji)
Tab. 2.3. Dane techniczne sterownika IUC9000
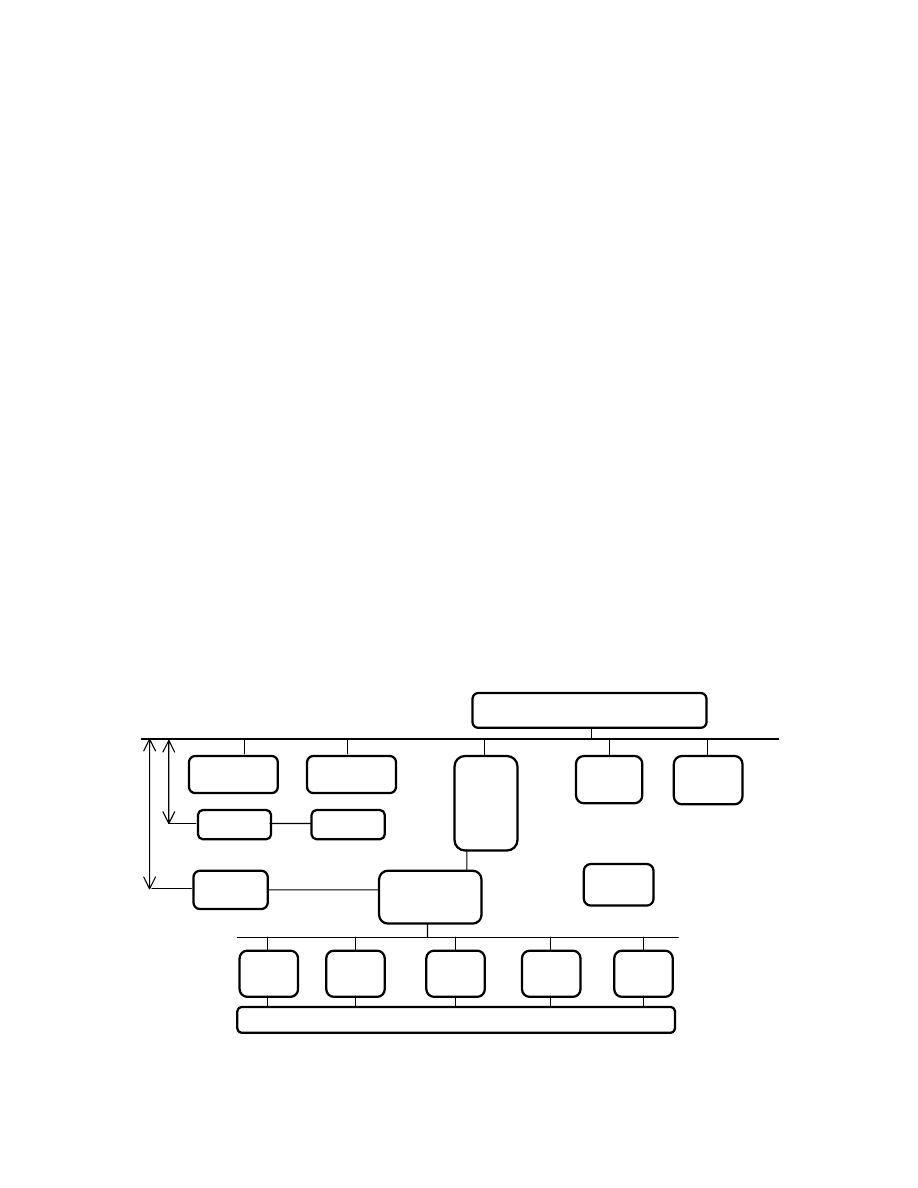
2.5 Moduły przetwarzania sygnałów
Systemy
komputerowe
sterowania i systemy rzeczywiste są przeważnie połączone za
pomocą linii sygnałowych. Przekazywanie sygnałów do i z systemu komputerowego będzie
możliwe, jeżeli będzie on wyposażony w odpowiednie moduły przetwarzające sygnały. Moduły
takie przetwarzają sygnały na wielkości liczbowe zapisywane do rejestrów oraz wielkości
liczbowe zawarte w rejestrach na sygnały. Moduły te muszą spełniać wiele wymagań,
dotyczących szybkości przetwarzania oraz minimalizacji utraty informacji zawartych w sygnale.
Komputerowe systemy pomiarowe zawierają następujące elementy: czujniki
(transducers), przetworniki (signal conditioner), sprzęt komputerowy rejestracji danych,
oprogramowanie rejestracji danych [8] (rys. 2.7).
Czujniki odwzorowują w sposób jednoznaczny sygnały fizyczne jednego rodzaju na
sygnały fizyczne innego rodzaju. Mierzą one zjawiska fizyczne i dostarczają na wyjściu sygnały
elektryczne. Sygnały elektryczne dostarczane przez czujniki są proporcjonalne do wielkości
fizycznych, które śledzą. Wielkościami fizycznymi (wejściowymi) są sygnały mechaniczne,
termiczne, magnetyczne, chemiczne, radiacyjne i inne.
Sygnały elektryczne dostarczane przez czujniki muszą być przetransformowane do postaci
akceptowalnej przez komputerowy system rejestracji danych pomiarowych. Zadania te realizują
przetworniki pomiarowe, które przetwarzają z zadaną dokładnością sygnał wejściowy na sygnał
wyjściowy, według określonej zależności zadanej przez pewną funkcję (nazywaną funkcją
przetwarzania). Układy dopasowywające (kondycjonujące) realizują skalowanie sygnału, jego
wzmocnienie i linearyzację, kompensację zimnych ogniw, filtrację.
Wyróżnia się następujące elementy obróbki sygnałów:
Wzmocnienie słabych sygnałów. W celu uzyskania maksymalnej rozdzielczości karty,
wzmocnione sygnały powinny osiągać pełny zakresu napięciowy, przewidziany dla karty.
Izolacja sygnałów przetwornika. Przed przekazaniem sygnałów do komputera jest
dokonywana ich izolacja ze względów bezpieczeństwa. System monitorowany może mieć
składowe przejściowe wysokonapięciowe, które mogą uszkodzić komputer. Dodatkowym
powodem izolacji jest eliminacja różnicy potencjałów mas między kartą a czujnikiem.
Filtracja jest stosowana dla uzyskania dokładniejszych pomiarów. Celem filtracji jest
usunięcie niepożądanych składowych sygnału. Przykładem jest filtracja szumu przy mierzeniu
temperatury.
Linearyzacja dla pewnych typów mierników. Wiele mierników posiada nieliniową
odpowiedź, w tym przypadku realizowana jest linearyzacja sygnałów.
Przetw.
Przetw.
Przetw.
Przetw.
Czujnik
Czujnik
Czujnik
Czujnik
Obiekt
Przetwornik
Przetwornik
Przetwornik
Przetwornik
Przetwornik
inteligentny
Przetwornik
inteligentny
A/C
Cyfrowe
C/A
Cyfrowe
Karta tr.
szeregowej
Karta tr.
szeregowej
Oprogramowanie
Procesor
Inne
Pamięć
Aplikacyjne
systemowe
Magistrala
Rys. 2.7. Schemat typowego systemu sterującego
Typowe przetworniki posiadają jedno wejście i jedno wyjście sygnałowe (SISO - Single Input
Single Output). Coraz częściej pojawiają się przetworniki o wielu wejściach i jednym wyjściu
(MISO - Multiple Input Single Output) oraz o wielu wejściach i wielu wyjściach (MIMO - Multiple
Input Multiple Output). Przetworniki typu MISO i MIMO wyposażone są procesor, który dokonuje
pewnej obróbki danych. Przetworniki takie noszą nazwę inteligentnych (smart).
2.5.1 Podstawowe parametry modułów przetworników sygnałów
Systemy komputerowe typu PLC, PC, VMEbus umożliwiają wprowadzanie i wyprowadzanie
sygnałów oraz danych poprzez odpowiednie karty, podłączane do magistrali systemu
komputerowego. Wyróżnia się następujące kategorie przetwarzania sygnałów realizowanych
przez karty wprowadzania i wyprowadzania sygnałów:
1. Przetwarzanie
typu
A/C
(Analog/Cyfra) lub odpowiednik ang. A/D (Analog/Digital). Sygnał
analogowy pojawiający na wejściu przetworzony zostanie na sygnał cyfrowy o zadanej
długości podanej w bitach (zwykle 8, 12, 16 bitów).
2. Przetwarzanie C/A lub odpowiednik ang. D/A. Liczba zapisana w postaci dwójkowej w
komputerze zostanie wyprowadzona jako sygnał analogowy.
3. Przetwarzanie cyfrowe sygnałów wejściowych. Sygnał elektryczny na wejściu traktowany
jest jako sygnał dwustanowy (binarny) i zostanie przetworzony do postaci liczby
jednobitowej.
4. Przetwarzanie cyfrowe sygnałów wyjściowych. Liczba jednobitowa zostanie
wyprowadzona jako sygnał przyjmujący jeden z dwóch możliwych stanów.
5. Liczniki/zegary
(Counter/Timer)
realizują zliczanie zdarzeń, pomiaru szerokości impulsów
i okresów pomiaru.
2.5.2 Zagadnienie doboru modułów przetworników sygnałów
Przy doborze modułów typu A/C należy sprawdzić następujące podstawowe ich własności:
•
•
•
•
•
Liczba wejść analogowych. Dla danego modułu określana jest możliwa lici ba wejść analogowych. Określa
ona liczbę sygnałów analogowych możliwych do wprowadzania.
Typy wejść analogowych. Wejścia analogowe mogą być jednobiegunowe drugim
biegunem jest wtedy wejście masy dla całej karty (ANALOG_GND) – lub
dwubiegunowe. W przypadku wejść dwubiegunowych (różnicowych) odległość od
urządzenia pomiarowego może być większa.
Szybkość przetwarzania. Na szybkość przetwarzania wpływa wiele czynników:
szybkość taktowania zegara i szybkości zamiany sygnału analogowego na cyfrowy,
metody organizacji transmisji danych, czas pobrania danych z karty i załadowania
danych do pamięci komputera, przepustowość (zależną od liczby kanałów).
Szybkość taktowania zegara. Karta posiada wewnętrzny zegar, który może zostać
zwykle zaprogramowany na częstość zegara od 0.001HZ do 200 KHZ Ważne jest
odpowiednie dobranie częstości próbkowania. Prawidłowe prze kształcenie sygnału na
postać cyfrową dla analizy (Nyquist - teoria próbkowania) wymaga częstości
próbkowania dwa razy większej. Sygnały dźwiękowe dostarczane przez mikrofon mają
składowe do 20 KHZ, w tym przypadku częstość próbkowania powinna wynosić 40KHz.
Technika multipleksowania jest powszechną techniką, stosowaną przy pomiarze kilku
sygnałów przez kartę analogowo-cyfrową. Karta taka pobiera sygnał dla pierwszego
kanału, przechodzi następnie do kanału drugiego itd. Stąd częstość próbkowania dla
kanału to maksymalny czas próbkowania dla całej liczby kanałów
Metody organizacji transmisji danych z karty do pamięci. Stosowane dwie metody
przekazywania danych z karty do pamięci: programowa (meto elastyczna, lecz
wolniejsza) i sprzętowa (metoda nieelastyczna, lecz szybka Przekazywanie danych
realizowane programowo może być wykonane metodą odpytań lub przerwań.

•
•
•
•
•
•
•
Czas pobrania danych z karty i załadowania do pamięci. Na czas ten ma wpływ na
możliwość bezpośredniego dostępu do pamięci (DMA) bez udziału procesora. DMA
(Direct Memory Access) jest mechanizmem, który realizuje transmisję danych z karty do
pamięci komputera.
Równoczesne pobranie danych. Istnieją zastosowania, które wymagają pomiaru
dokładnie w tym samym czasie (dla niektórych systemów 4 mikrosekundy może być
zbyt dużą różnicą). Własność prawie równoczesnego pobrania wartości sygnałów
nazywana jest w języku ang. „aperture matching” (migawkowe dopasowanie).
Odzwierciedla ono maksymalną różnicę czasu próbkowania pomiędzy różnymi
kanałami. Karty mające takie własności wyposażone są we wzmacniacze typu pobierz i
trzymaj (sample and hold).
Rozdzielczość sygnałów analogowych. Rozdzielczość definiowana jest jako liczba
bitów, za pomocą których może być zapisana wartość sygnału. Dla przykładu 12-bitowy
zapis danej daje rozdzielczość 1 z 4096. Rozdzielczość ta jest stosowana zarówno dla
wejściowych jak i wyjściowych sygnałów analogowych.
Zakres wejściowy sygnałów analogowych. Zakres tych wejść można zmienić
poprzez przełączniki znajdujące się na płycie. Przykład wyboru zakresu wejść
napięciowych: [-5V, 5V], [0V, 10V], [-10V, 10V].
Wzmocnienie sygnałów analogowych (gain). Wzmocnienie sygnałów może być
określone w sposób sprzętowy poprzez ustawienie przełączników na karcie lub w
sposób programowy. Programowa zmiana wzmocnienia realizowana jest przez niektóre
karty, dla procesów wymagających zmiennego wzmocnienia w trakcie procesu
rejestracji.
Zakłócenia i nieliniowości. Nieliniowość podawana jest jako liczba mniej znaczących
bitów. Przykładowo nieliniowość ±2LSB (Least Significant Bits) dotyczy 2 najmniej
znaczących bitów. Dokładność dla zakresu napięciowego (np. 0,01% pełnego zakresu
(full span) ).
Pozostałe dane techniczne. Dla kart przetworników podawane są dodatkowe dane
techniczne dotyczące wymiarów, zakresu temperaturowego, niezawodnej pracy,
oporności wejściowej itd.
Wyjścia analogowe
Wyjścia mogą być skonfigurowane jako wyjścia jedno lub dwubiegunowe, dla różnych
zakresów napięć. Dla wyjść analogowych podawany jest czas ustawienia (settling time) sygnału
wyjściowego z zadaną dokładnością dla podanej wartości liczbowej. Dla takiego wyjścia
definiowana jest maksymalna częstość obróbki sygnału wyjściowego (slew rate), to znaczy
maksymalna częstość z jaką może być zmieniany sygnał wyjściowy.
Wejścia–wyjścia cyfrowe
Każdy port może być użyty jako port wejściowy lub wyjściowy. Niektóre porty mogą być
użyte do synchronizacji (handshaking) pracy pozostałych portów.
Liczniki i wejścia-wyjścia cyfrowe zależne od czasu
Sygnały cyfrowe zależne od czasu są użyteczne w zastosowaniach w których stosuje się
zliczanie zdarzeń, generowanie impulsów, sygnałów prostokątnych, itp. Wyróżnia się trzy
podstawowe sygnały: bramki - są to sygnały używane do włączania i wyłączania funkcji liczników,
źródła – sygnał cyfrowy powodujący zwiększenie stanu licznika o 1, wyjścia przeznaczone do
wyprowadzenia impulsów bądź sygnałów prostokątnych. Liczniki są używane do generacji
częstości lub impulsów, jak również do zliczania zdarzeń lub pomiaru okresów częstotliwości lub
impulsów. Licznik 16 bitowy może zliczać wartości do 65536.
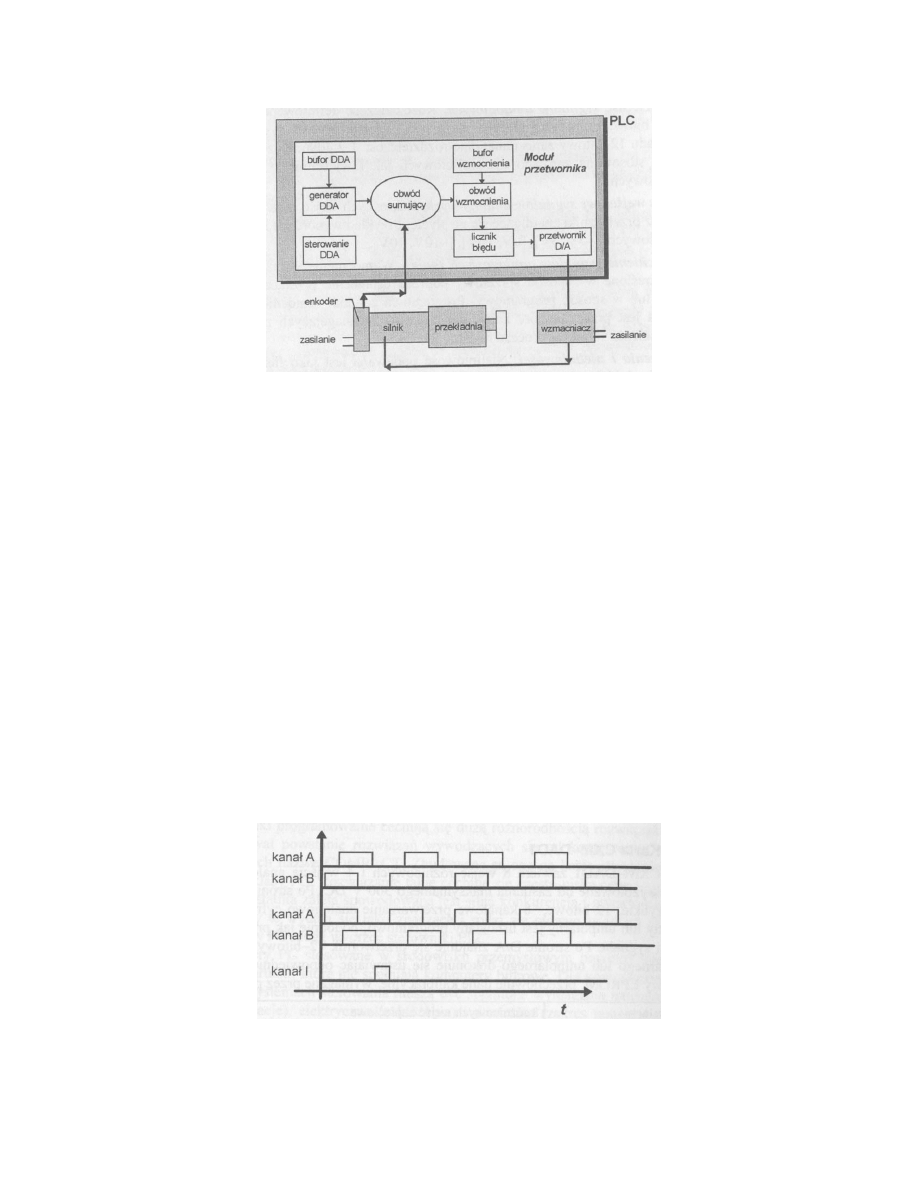
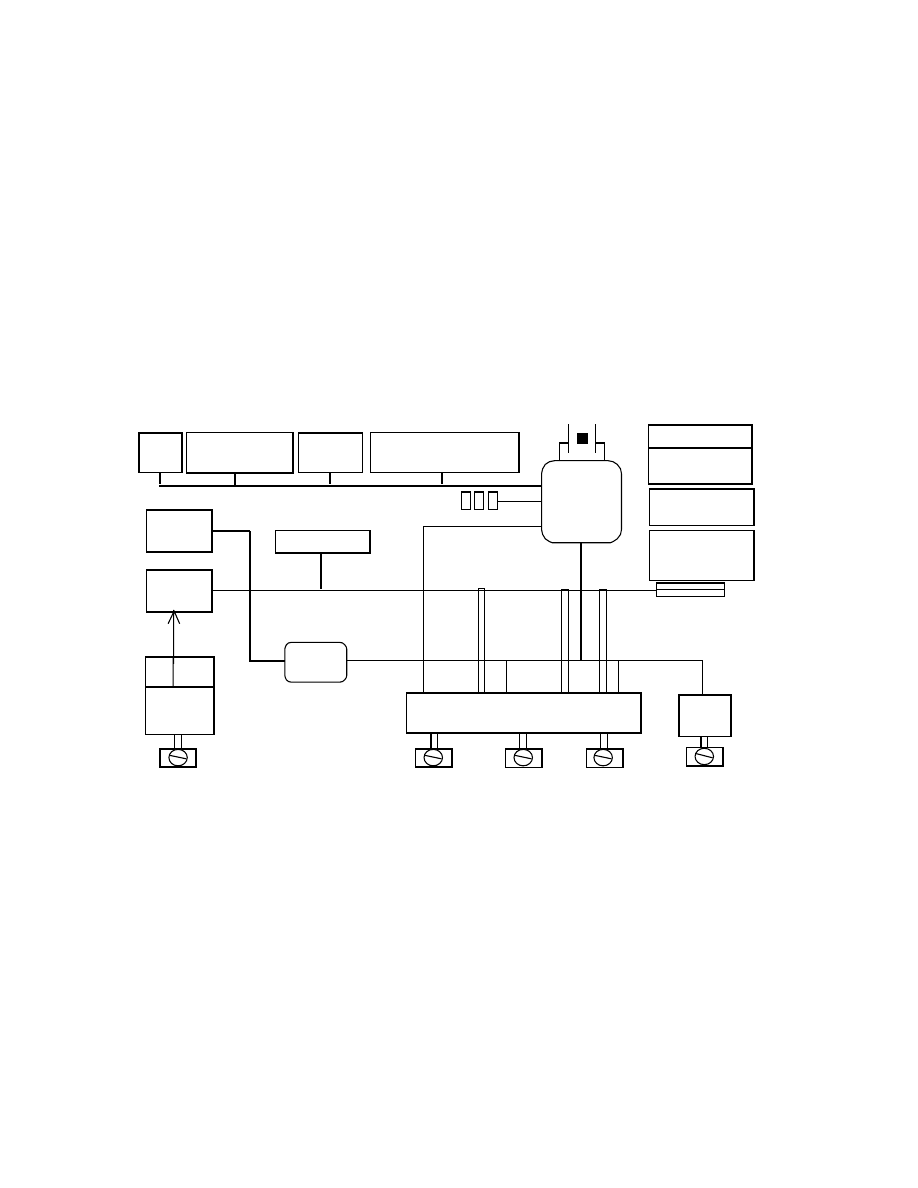
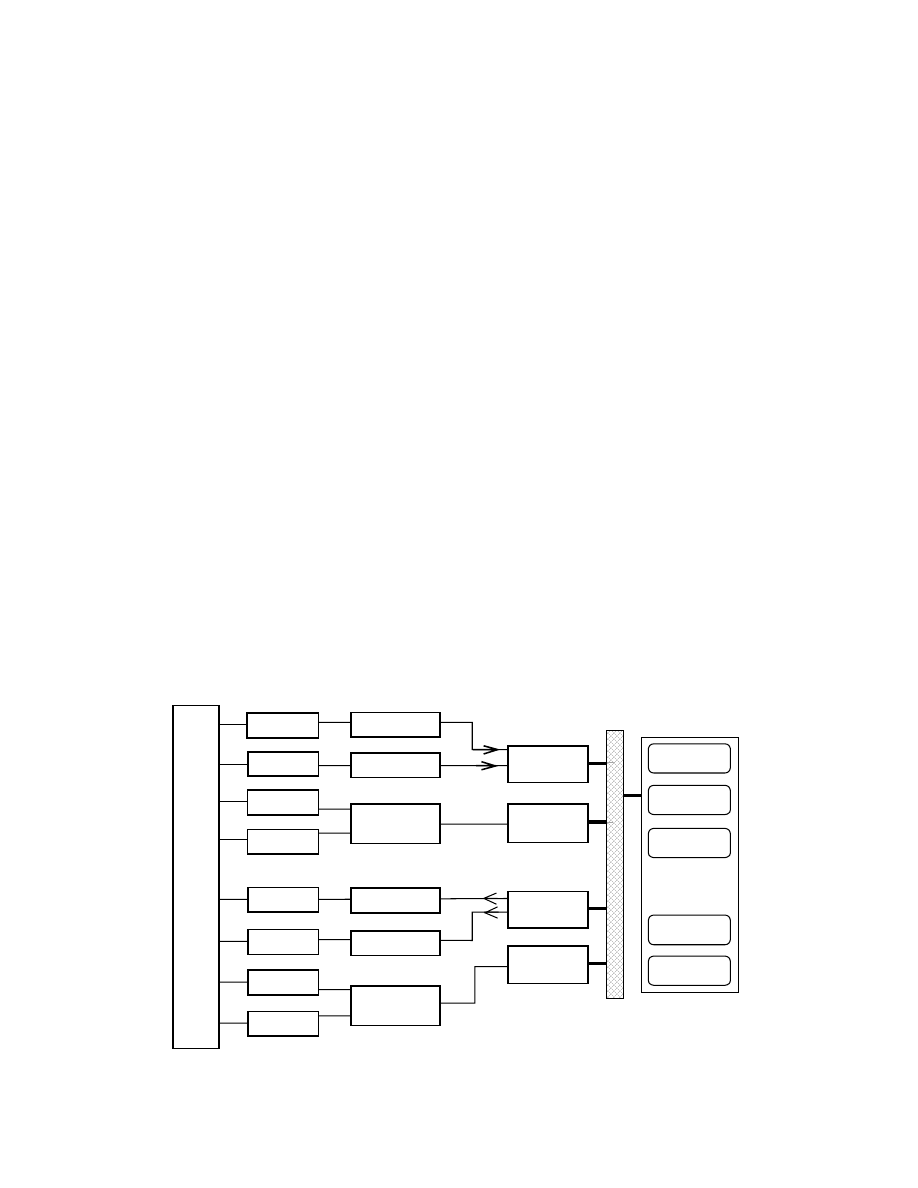
Rys. 2.8. Schemat sterowania silnikiem przy użyciu kart przetworników
2.5.3 Specjalizowane
moduły przetworników
Dla systemów komputerowych oferowane są również bardziej specjalizowane karty
przetworników sygnałów. Popularne są karty przeznaczone do sterowania serwomechanizmami,
nazywane sterownikami napędów (motion controllers). Na rysunku 2.8 podano schemat użycia
modułu przy sterowaniu jednoosiowym.
Sterowniki napędów bazują na technice zwanej cyfrową analizą różnicową DDA (Digital
Differential Analysis). W tej technice sterowanie napędem definiuje się cykl DDA, który może
trwać przykładowo od 1ms do 2 sekund. Czas trwania cyklu DDA określony jest programowo. Dla
każdego cyklu zadawana jest liczba impulsów prostokątnych, wyznaczająca liczbę przesunięć
jednostkowych silnika. Liczba ta może przyjmować wartości np. z przedziału od 0 do 4095 i jest
ustalana w sposób programowy oraz zapisywana do bufora DDA przed rozpoczęciem na-
stępnego cyklu DDA. Enkoder silnika przesyła do obwodu sumującego impulsy prostokątne,
podające rzeczywistą liczbę przesunięć jednostkowych silnika. Współczynnik wzmocnienia
sygnałów w obwodzie wzmocnienia można zmieniać programowo. Licznik błędów steruje
przetwornikiem D/A. Enkodery, zwane również impulsatorami optoelektronicznymi, generują
impulsy prostokątne (rys. 2.9) w dwóch kanałach A i B. Impulsy obu tych kanałów mają tę samą
częstotliwość, lecz są przesunięte w fazie o 1/4 okresu. Dla jednego kierunku obrotu impulsy
kanału A poprzedzają impulsy kanału B, a dla drugiego impulsy kanału B poprzedzają impulsy
kanału A. Enkoder może również posiadać układ indeksujący, powodujący wytworzenie impulsu
prostokątnego dla pełnego obrotu osi. Sygnał tego układu, wyprowadzany na kanał oznaczony
przez I (Indeksujący), ułatwia kontrolę położenia osi silnika.
Rys. 2.9. Przebiegi impulsów enkodera
Niektóre moduły sterujące ruchem silników mają szersze możliwości w postaci
dodatkowych wejść i wyjść binarnych, przetwarzania A/D i D/A. Dodatkowo moduł może być
wyposażony w oprogramowanie umożliwiające korzystanie z prostego języka, przeznaczone do
sterowania napędem. Takie programowanie umożliwia pracę procesorów modułu niezależną od
pracy komputera głównego (w tym przypadku PLC). Dokonywana jest jedynie synchronizacja
wykonywania poprzez przekazywanie parametrów. Zmiana parametrów dokonywana przez
komputer główny, może przykładowo spowodować przejście procesora sterującego napędem do
wykonania określonego segmentu programu. Komputer główny może również pobierać
informację o stanie procesu.
2.5.4 Przykłady modułów
Sterowniki programowalne IUC 9000 mogą być wyposażone w różne karty przetworników.
Dla przykładu podano parametry kart CXM -DI03 (tab. 2.4) i CXM-DAD1 (tab. 2.5).
Karta CXM - DIO3
CXM-DIO3 zawiera 16 izolowanych, cyfrowych wejść oraz 8 wyjść 24 V. Posiada również
zewnętrzny reset umożliwiający przejście wszystkich wejść/wyjść w stan niski oraz
zatrzymanie sterownika w przypadku awarii.
Izolacja:
zgodnie z IEC65A 2 kV
Wejścia: 16
wejść, 24V DC, 500 mA
czas włączenia: 5
ms
czas wyłączenia: 5
ms
niski stan:
< 5 V
>10 V
Wyjścia: 8
wyjść, 24 V DC,500 mA
zewnętrzne uziemienie elektrycznie izolowane
Zasilanie:
CXC +5V
zewnętrzne +24 V
Zakresy temperatur Standardowy (od 0
°C do +70°C)
Tab. 2.5. Dane techniczne karty CXM-DIO3
Karta CXM-DAD1
CXM-DAD1 zawiera 8 wejść różnicowych i 4 wyjścia analogowe galwanicznie izolowane od
systemowego zasilania maksymalnego 500 V DC. Po stronie A/D zapewnia szybkie, 12 bitowe,
8 kanałowe przetwarzanie analogowo cyfrowe. Tryb bipolarny lub unipolarny jest ustawiany
programowo, podobnie jak przerwanie konwersji sygnału. Po stronie D/A znajduje się przetwornik
12-bitowy. Wybór trybu bipolarnego lub unipolarnego dokonuje się ustawiając odpowiednio
zworki. 128 bajtowy EPROM przechowuje dane kalibracyjne wymagane przez przetworniki.
Wejście: 8
różnicowych wejść napięciowe
Przetwornik A/D
LTC1290DCN
Zakresy
napięciowe
± 10 V, ± 5 V (unipolarnie)
0-10 V,0-5 V (bipolarnie)
Rozdzielczość
12-bitowy przetwornik A/C
Dokładność 3/4
LSB
Zakres prądowy 0-20
mA
Czas konwersji 43
µs
Wyjście:
4 wyjścia
Przetwornik D/A
AD7568B
Zakresy
± 10 V DC lub 0-10 V DC ,wybór za pomocą zworek
napięciowe
Rozdzielczość
12-bitowy przetwornik C/A
Napięcie
odniesienia
0-10.1 V - programowalne,12 - bit,każdy kanał
Zakres prądów
wyjściowych
0-20 mA
Max. prąd
wyjściowy wyjścia
2 mA
Zewnętrzne
zasilanie wyjścia
24 V DC
Czas ustalania
wyjścia
0.4 V/
µs
Błąd liniowości
± 0.75 LSB
EEPROM
93C46, 128 bajtowy EPROM
izolacja
galwaniczna
500 V DC
Tab. 2.5 Dane techniczne karty CXM – DAD1
2.6 Sterowniki programowalne a przemysłowe komputery klasy PC
Na rynku sterowników programowalnych obserwowany jest trend podobny jak dla innych
komputerów stosowania coraz szybszych procesorów. Producenci oferują połączenia sieciowe
umożliwiające sprzężenie sterowników z innymi jednostkami przetwarzającymi.
Sterowniki programowalne cechują się dużą różnorodnością rozwiązań. Fakt ten
spowodował powstanie rozwiązań wywodzących się od komputerów osobistych noszących
nazwę COMPACT. Zbudowane są one na bazie standardowych komputerów klasy PC.
Rozwiązanie takie cechuje się często niską ceną i prostotą budowy. Ta ostatnia zaleta
spowodowana jest silną konkurencją i otwartością rozwiązań. Zalety te wydają się jako znaczące
i rodzi się pytanie w jakim stopniu komputer klasy PC mogą wyprzeć sterowniki PLC.
Komputery PC stosowane w środowisku przemysłowym powinny spełniać dodatkowe
warunki, które nie spełniają komputery biurowe. Dla komputerów stosowanych w systemach
sterowania muszą być spełnione wymagania mechaniczne (drgania, wibracje), elektryczne
(zakłócenia) i otoczenia (zakres temperaturowy, wilgotność, zapylenie, itp.). Komputery biurowe
zawierają napędy dysku, które są narażone na drgania i wibracje. Na rynku PC występuje silna
tendencja do powstawania coraz to nowych wersji komputerów klasy PC, tendencja jest tak silna,
że po krótkim okresie czasu nie są dostępne wersje wcześniej produkowane. Zjawisko to
związane jest z małą stabilnością linii produkcyjnych jest istotną wadą stosowania tych systemów
w środowisku przemysłowych. Związane jest to z tym, że każde wprowadzenie w środowisku
przemysłowym nowej wersji sprzętowej powinno być poprzedzone testami, które w środowisku
przemysłowym są kosztowne.
Spełnienie wymienionych warunków przez komputery PC powoduje zwiększenie kosztów
związanych z ich wytwarzaniem. Przystosowanie komputerów PC do celów sterowania może
prowadzić do ograniczenia ich otwartości (nie wszystkie programy będą mogły być uruchamiane).
PLC spełniają od dawna pewne wymagania, które nie spełniają komputery PC. Należą do nich
integracja sprzętowa z otoczeniem. PC i PLC do sprzężenia z otoczeniem potrzebują tą sama
liczbę modułów i portów wejścia-wyjścia. W USA [7] tylko około 10% sprzedawanych
sterowników przeznaczonych jest dla dużych aplikacji (powyżej 500 punktów I/O). Oznacza to, że
pozostała część rynku bazuje na sterownikach klasy małej i średniej. Minimalny koszt
sterowników małych o liczbie punktów I/O wynoszącej od 10 do 32 wynosi 150$, natomiast
minimalny koszt sterownika z liczbą punktów I/O powyżej 500, z możliwością podłączenia do
sieci przemysłowej, regulacją PID oraz z odpowiednią ilością pamięci wynosi 3000$. Te koszty są
trudne do przełamania przez przystosowane do środowiska przemysłowego komputery PC.
Jednym z dalszych wymagań jest zapamiętywanie setup-u, programu i danych oraz
możliwość łatwego startowania systemu. Możliwe jest zapisywanie setup-u użytkownika w
pamięci EEPROM. Natomiast programy i dane mogą być zapisywane do dysków krzemowych

SSD (solid state disk). Spośród dysków krzemowych największe rozpowszechnienie znalazły
dyski typu Flash-Disk. Dysk ten pracuje na podobnej zasadzie jak zwykły dysk. Opracowane
zostały dwa rodzaje systemów plikowych dla dysków typu flash: FFS (Flash File System) firmy
Microsoft oraz wspomagany przez różne firmy FTL (File Translation Layer). FFS widzi Flash-Disk
jak urządzenie sieciowe, natomiast FTL przypomina system plików DOS-u. Można wyróżnić trzy
rozwiązania komputerów bazujących na PC stosowane w środowiskach przemysłowych:
•
•
•
Industrial PC. Są to komputery o PC adaptowane do środowiska przemysłowego,
poprzez zastosowanie odpowiedniej obudowy zabezpieczającej np. przed zakłóceniami
elektrycznymi, zapyleniem.
PCcompact. Jest to rozwiązanie polegające na zintegrowaniu wszystkich zasobów i
urządzeń peryferyjnych na jednej płycie. Komputery tego typu o nazwie PC4 i PC5
oferowane np. przez firmę OR umożliwiają podłączenie modułów sieci miejscowej CAN.
Moduł cyfrowy CAN-D posiada 8-bitowe grupy cyfrowych sygnałów wejścia i wyjścia.
Moduł analogowy CAN-A z wiem grupę sygnałów analogowych wejściowych i
wyjściowych.
Compact PCI. Compact PCI jest 32/64 bitową magistralą w standardowym formacie
Eurokaty o szybkości transmisji 132/264 MB/s. Komputer ten posiada płytę - backplane
z 8 gniazdami rozszerzeń.
Zastosowanie komputerów do sterowania bazujących na komputerach klasy PC będzie się
powiększało tam, gdzie konieczna jest w szerszym zakresie wizualizacja i archiwizacja danych.
Wyszukiwarka
Podobne podstrony:
PROGRAMOWALNE STEROWNIKI LOGICZNE PLC
12 Podstawy automatyki Układy sterowania logicznego
Realizacja układu sterowania logicznego na?zie sterownika PLC sprawozdanie
Programowalny sterownik czasowy
7 Sterowanie logiczne na bazie Nieznany
A-03 Komparator, Elektrotechnika AGH, Semestr V zimowy 2014-2015 - MODUŁ C, semestr V (moduł C), Pod
9 Sterowanie logiczne na bazie sterownika SIMATIC S7 200 oraz modelu przejścia dla pieszych
H Juszka i in Sterowanie logiczne z regulacja PID
Programowalne uklady logiczne
Podstawy programowania sterowników PLC (2)
Programowanie sterowników PLC u
Prezentacja Języki programowania sterowników PLC
Synteza sekwencyjnych układów sterowania logicznego sprawozdanie
09 Programowanie sterownika PLC
sumator szeregowy projekt, Elektrotechnika AGH, Semestr V zimowy 2014-2015 - MODUŁ C, semestr V (mod
więcej podobnych podstron