
92
Scientific Journals 13(85)
Scientific Journals
Zeszyty Naukowe
Maritime University of Szczecin
Akademia Morska w Szczecinie
2008, 13(85) pp. 92‐98
2008, 13(85) s. 92‐98
Baza wiedzy nawigacyjnej
Navigational knowledge base
Janusz Uriasz
Akademia Morska w Szczecinie, Instytut Nawigacji Morskiej
70-500 Szczecin, ul. Wały Chrobrego 1–2, tel. 091 48 09 398, e-mail: lubat@am.szczecin.pl
Słowa kluczowe: baza, reprezentacja wiedzy, wspomaganie decyzji, nawigacja
Abstrakt
Na statkach morskich i w ośrodkach kontroli ruchu coraz częściej instalowane są systemy wspomagające pra-
ce nawigatorów. Do niedawna działania systemów obejmowały zadania wykonywane uprzednio manualnie,
np. akwizycji, śledzenia, odbioru informacji itd. Obecnie wspomaganie systemów może dotyczyć o wiele
większego obszaru, obszaru dla którego wymagane jest posiadanie wiedzy dotyczącej np. pracy, zasad za-
chowania, przepisów itd. Przykładem jest prototyp systemu wspomagania decyzji nawigacyjnej budowanego
w Akademii Morskiej w Szczecinie. Praca tego systemu opiera się o bazę wiedzy nawigacyjnej. W artykule
przedstawiono definicję wiedzy nawigacyjnej, jej prezentację oraz funkcje w systemie wspomagania decyzji
nawigacyjnej.
Key words: base, knowledge representation, decision support, navigation
Abstract
Navigators’ support systems have been introduced on the sea going ships and in the vessel traffic centers.
Those systems had been until recently used for manually performed tasks like: equiring, monitoring, informa-
tion reception etc. Nowadays, supporting systems may concern much wider areas, especially areas in which
knowledge about work, behaviour, regulations etc. is required. An example of such a system could be
a prototype of navigational decision support system being built at the Maritime University of Szczecin.
The article presents a definition of navigational knowledge, its representation and function in navigational
decision support system.
Wiedza nawigacyjna
Zadaniem nawigacji morskiej jest bezpieczne
przeprowadzenie statku pomiędzy punktami drogi.
Zadanie to realizuje nawigator morski w oparciu
o posiadaną wiedzę. Formalnie jej adekwatnym
wyznacznikiem są kompetencje potwierdzone od-
powiednimi certyfikatami. Międzynarodowa Orga-
nizacja Morska (IMO), mając na celu zapewnienie
globalnego poziomu bezpieczeństwa nawigacji,
określa minimalne standardy kompetencji zawodo-
wych. Zostały one zawarte w Konwencji i Kodzie
STCW. Stanowią precyzyjne wymagania kompe-
tencji odnoszących się do rzeczywistej wiedzy
i umiejętności marynarzy oraz wykonywania przez
nich zadań. W konwencji zostały szczegółowo zde-
finiowane obszary wiedzy, sposoby ich demon-
strowania oraz metody oceny. Wymagania te (zapi-
sy) podlegają okresowym aktualizacjom. Zdefinio-
wane obszary kompetencji nawigatora stanowią jej
sformalizowany opis, tzn. zawiera informację nt.
wiedzy, jej zakresu (przenikanie funkcji w kierunku
horyzontalnym oraz wertykalnym kompetencji),
przeznaczenia (czemu ma służyć), wykorzystania
(sposób realizacji zadań) oraz metod jej oceny [1].
Czym jest wiedza, wiedza nawigacyjna? Należy
rozróżnić kilka kolejnych elementów, które w cało-
ści ją utworzą:
pierwszą z nich są dane, fakty. Stanowią one
podstawową jednostkę informacji;
drugą stanowi informacja, która jest zbiorem
danych tego samego typu;

Baza wiedzy nawigacyjnej
Zeszyty Naukowe 13(85)
93
trzecią jest wiedza jako uporządkowany i dający
się interpretować zbiór informacji. Wiedzę tę
możemy z kolei podzielić na dwie grupy, tj.:
1) Poznaną (znaną, zdefiniowaną, „skatalogo-
waną”), jest to wiedza na temat danej dzie-
dziny składająca się:
− z wiedzy proceduralnej (reguły, strategie,
procedury);
− z wiedzy deklaratywnej (koncepcje,
obiekty, fakty);
− z wiedzy heurystycznej (intuicja, reguły
zdroworozsądkowe);
− z wiedzy strukturalnej (związki między
koncepcjami, reguły);
− z metawiedzy (wiedza o typach i sposo-
bach użycia);
2) Asocjację empiryczną (doświadczenie zawo-
dowe, dobra praktyka morska);
wiedza nawigacyjna, którą należy rozumieć jako
zdolność do używania, modyfikowania, zmiany
interpretacji zbiorów informacji z dziedziny na-
wigacji. Jest zdolnością do wyciągania prawi-
dłowych wniosków na podstawie informacji
niepełnej, niespójnej, nieprecyzyjnej.
W systemie nawigacyjnym wspomagania decy-
zji nawigatora znajdziemy wszystkie powyższe
elementy tworzące wiedzę nawigacyjną. Będą one
zapisane i reprezentowane w różnych formach.
Formy reprezentacji wiedzy nawigacyjnej
Struktury baz danych
Zestawy danych oraz informacji są gromadzone
od stuleci w wielu formach. W przypadku informa-
cji nawigacyjnej znamy liczne, budowane i aktuali-
zowane od wielu lat publikacje stanowiące źródło
informacji. Można wymienić tutaj locje, spisy róż-
nego rodzaju i w końcu podstawowe źródło wiedzy
nawigacyjnej, tj. mapę. Postęp technologiczny
umożliwia wykorzystanie w tym celu narzędzi in-
formatycznych. Dlatego też powstają formy elek-
troniczne powyższych publikacji nautycznych.
Obejmują one swym zakresem nie tylko ich prze-
chowywanie, prezentację, archiwizację, ale także
aktualizacje i dystrybucję.
Należy przytoczyć tutaj koncepcję budowy
ogólnoświatowej bazy nawigacyjnych map elektro-
nicznych, tj. WEND (Worldwide Electronic Navi-
gational Chart Database) [2]. Koncepcja budowy
takiej bazy została rozwinięta 13 lat temu przez
IHO. Ma ona zapewnić w skali globalnej zapotrze-
bowanie shippingu na jednolitą, dostępną podstawę
kartograficzną. Pokrycie obszarów wodnych przez
mapy ENC znacznie zwiększyło się w ostatnich
latach. Mimo wszystko ciągle istnieją jeszcze rejo-
ny, gdzie takich map nie ma. Ostanie opracowania
DNV szacują, iż do 2010 roku wszystkie trasy
obsługiwane przez jednostki morskie o pojemności
powyżej 10 000 ton będą pokryte mapami ENC.
Mapa morska jest podstawowym źródłem informa-
cji i wiedzy nt. środowiska, w którym znajduje się
statek. Podstawowe informacje stanowiące o bez-
pieczeństwie żeglugi obejmują dane o przebiegu
izobat głębokości, o położeniu przeszkód (niebez-
pieczeństw nawigacyjnych), położeniu znaków
nawigacyjnych, dróg wodnych itd. Wiedza ta ma
podstawowe znaczenie przy planowaniu podróży,
a także podczas jej realizacji przy planowaniu
i wykonywaniu manewrów antykolizyjnych. Nawi-
gator lub system wspomagania decyzji nawigacyj-
nych musi mieć pełny i ciągły dostęp do tego źródła
wiedzy. Jest on w dzisiejszej dobie w miarę prosty,
gdyż treści kartograficzne zapisane są w bazie
danowych. Istniejące standardy IHO, bazy danych
i ich zapis pozwalają uzyskać dostęp do wybranych
informacji kartograficznych – tych niezbędnych
w procesie wspomagania decyzji. Możliwe jest
dowolne skalowanie (bez utraty istotnych faktów).
Ostatecznie w czasie rzeczywistym można uwz-
ględnić w prezentacji i skalowaniu danych wekto-
rowych (obiektów kartograficznych) niepewność
określania pozycji.
Algorytmy
Algorytm (łac. algorithmus) jest ścisłym prze-
pisem realizacji działań w określonym porządku.
Algorytmy wyznaczają w postaci kolejnych faz
(etapów) tok (sposób) postępowania w określonych
sytuacjach. W nawigacji postępowanie to jest czę-
sto normalizowane odpowiednimi przepisami. Tak
jest w przypadku zasad ruchu na morzu. Obowiązu-
jące w tej kwestii prawo – międzynarodowe prawo
drogi morskiej nakłada na statki wzajemne prze-
strzeganie ustalonych zasad w określonych sytu-
acjach, np. spotkań, wystawiania odpowiednich
znaków dziennych, pokazywania świateł nawiga-
cyjnych, nadawania sygnałów mgłowych lub ma-
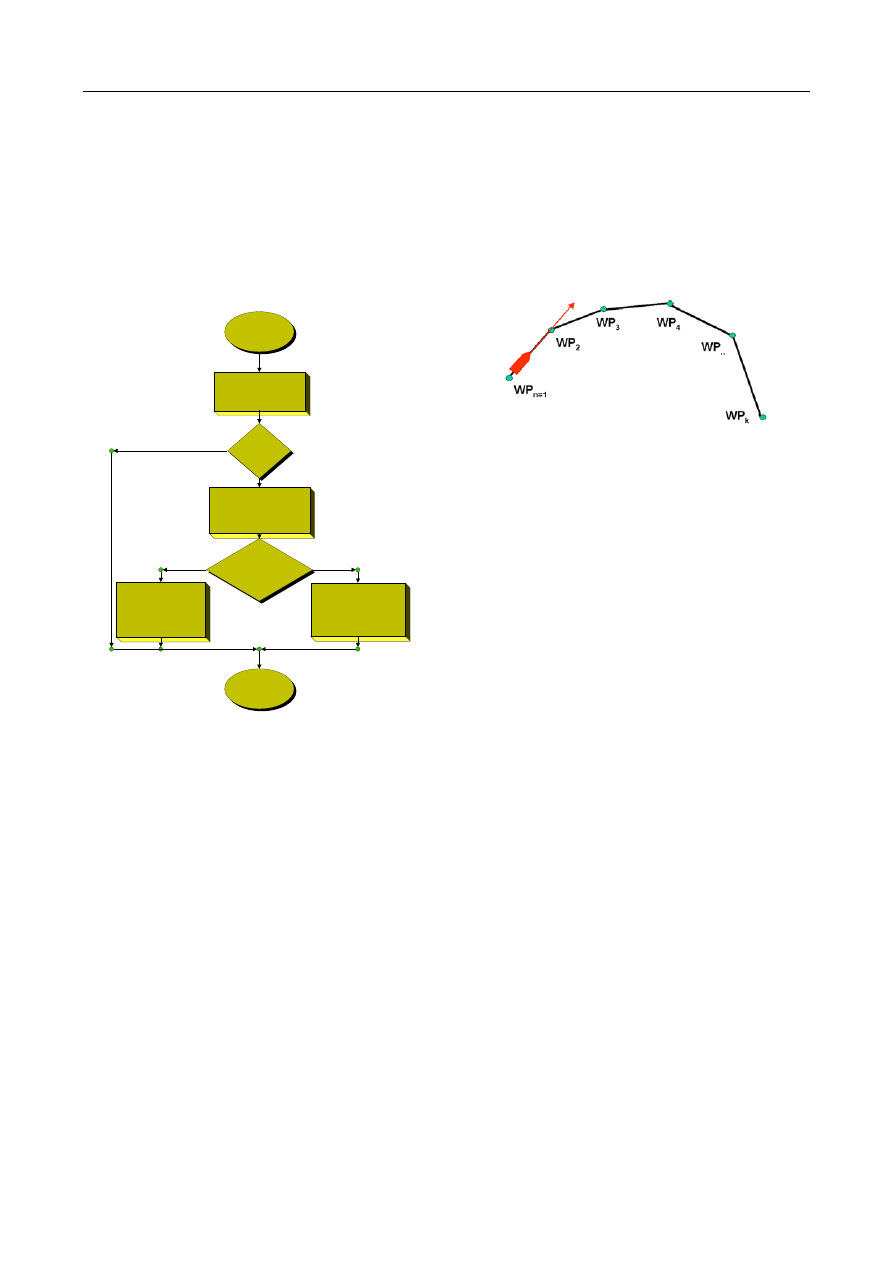
newrowych itd. Przepisy COLREG’s (w całości lub
niektórej ich części – prawidła) mogą być przed-
stawiane w formie algorytmów. One powodują, że
możliwa jest właściwa interpretacja sytuacji nawi-
gacyjnej i przypisania jej do odpowiedniego prawi-
dła (rys. 1).
Bardzo skuteczną metodą zapisu wiedzy doty-
czącej rozwiązania zagadnienia jest jej zdefiniowa-
nie w formie algorytmu rekurencyjnego. Algorytm
rekurencyjny lub wzór rekurencyjny (1) jest zapi-
sem rozwiązania lub realizacji zadania w bardzo
naturalnej i bliskiej nawigatorowi formie. Algorytm
w trakcie działania odwołuje się sam do siebie
Janusz Uriasz
94
Scientific Journals 13(85)
i pozwala na podstawie znajomości jednego lub
kilku elementów zadania wyliczyć i rozwiązać cały
problem. W nawigacji morskiej algorytmy rekuren-
cyjne są stosowane w rozwiązywaniu zagadnień,
np. (rys. 2):
– planowania podróży,
– realizacji podróży,
– nawigacji zliczeniowej,
– operacji przeładunkowych,
– akcji SAR.
Stosuj dodatkowo
MPDM prawidła
części B sekcja II
Start
Stosuj MPDM
część C, D, E
Jesteś w
drodze?
Stosuj dodatkowo
MPDM prawidła
części B sekcja I
Jest ograniczona
widzialność?
Koniec
Stosuj dodatkowo
MPDM prawidła
części B sekcja III
Tak
Nie
Tak
Nie
Rys. 1. Stosowanie przepisów MPDM w nawigacji
Fig. 1. Compliance with collision regulations in navigation
(
)
(
)
(
)
(
)
−
=
→
−
<
→
⊗
→
=
=
→
+
+
1
dla
1
dla
1
1
k
n
WP
WP
f
k
n
WP
WP
P
WP
WP
f
WP
WP
P
k
n
k
n
n
n
k
n
(1)
gdzie:
WP – punkt drogi,
n –
numer
porządkowy punktu drogi,
k
– numer punktu końcowego drogi,
P – planowanie,
f
– nawigacyjna funkcja planowania okre-
ślona następująco:
f (S, A, Wh, C, In) = D:{d, KDd, V}
gdzie:
S –
statek,
A – akwen,
Wh – warunki pogodowe,
C – ładunek,
In – interwał planowania,
In:{WP, WF, Wachta,...,}.
Opcjonalnie funkcja planowania może dotyczyć
interwałów według punktu zwrotu, prognozy pogo-
dy, wachty nawigacyjnej, akwizycji echa, raportu
itd.
d –
droga,
KDd – kąt drogi nad dnem,
V – prędkości statku.
Rys. 2. Rekurencyjne planowanie podróży
Fig. 2. Recurrent voyage planning
Struktury abstrakcyjne
Dane oraz ich interpretacja możliwe są do zapi-
su/prezentacji za pomocą narzędzi sztucznej inte-
ligencji. Wiedza na temat interpretacji zbiorów
danych jest często wynoszona z praktyki zawodo-
wej. Jest to tzw. asocjacja empiryczna, która jest
wiedzą często nieformalną i jest bardzo trudna
w oficjalnym zapisie. Jest ona najczęściej przekazy-
wana w formie uwag, sądów czy opisów. Często
niejasne są jej reguły i powiązania faktów prowa-
dzących do właściwych wniosków. Ekspert dyspo-
nujący tą wiedzą jest zdolny rozwiązywać za-
gadnienia nawigacyjne, dysponując często niepew-
ną i probabilistyczną informacją. Stosuje przy tym
heurystyczne wnioskowanie. Nawigator, wykorzy-
stując pamięć autoasocjacyjną (autoskojarzeniową),
jest w stanie odtwarzać całość informacji na pod-
stawie informacji niepełnej. Posiada więc zdolność
prawidłowego interpretowania danych zniekształ-
conych lub niekompletnych. Wiedza tego typu jest
nieodzowna do prowadzenia bezpiecznej nawigacji.
Wiedzę tę można zapisać (reprezentować), wyko-
rzystując narzędzia i metody sztucznej inteligencji.
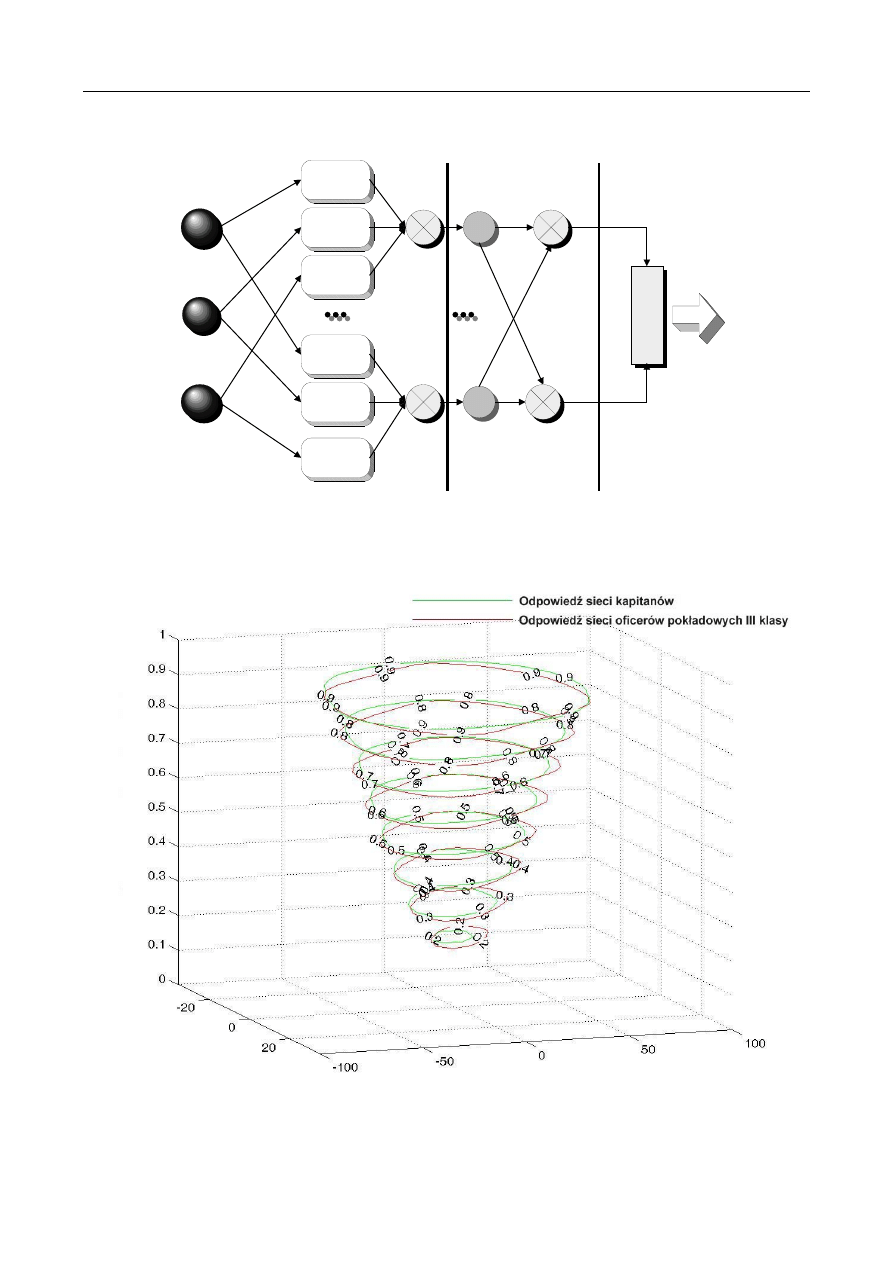
Mogą to być np. struktury sieci neuronowych czy
też sieci neurorozmytych (rys. 3).
Sieci neurorozmyte stanowią uniwersalny aparat
aproksymujący, odwzorowujący wiedzę uformo-
waną z wielomianowych zbiorów danych. Pozwala-
ją podczas procesu uczenia na utrwalenie wiedzy,
reguł i zależności jej wybranej funkcji (np. oceny
sytuacji nawigacyjnej). Główną zaletą struktur sieci
jest możliwość ekstrakcji utrwalonej w nich wiedzy
i wykorzystanie jej np. w procesach decyzyjnych
w sterowaniu ruchem statku (rys. 4) [3].
Baza wiedzy nawigacyjnej
Zeszyty Naukowe 13(85)
95
µ1 (1)
µ2 (1)
µ3 (1)
µ1 (27)
µ2 (27)
µ3 (27)
x1
x3
x2
f(x)
f1
f2
f1/f2
Warstwa 1
Warstwa 2
Warstwa 3
W1
..
..
W27
Rys. 3. Struktura sieci neuronowej o logice rozmytej oceny sytuacji nawigacyjnej
Fig. 3. Structure of neural network with fuzzy logic for the evaluation of a navigational situation
Rys. 4. Ocena sytuacji nawigacyjnej przez sieć neurorozmytą
Fig. 4. Evaluation of a navigational situation by a neural fuzzy network
Warstwa 1
Warstwa 2
Warstwa 3
Ocena s
ytuacji nawigacyjnej
∆KDd
∆y
Janusz Uriasz
96
Scientific Journals 13(85)
Tablice decyzji
Wygodną formą zapisu wiedzy jest zdefiniowa-
nie jej w formie logicznych tablic decyzji. Stanowi
ona opis sytuacji decyzyjnej (SD), która zdefinio-
wana jest jako zbiór uporządkowanych trójek:
(
)
u
dz
f
H
U
,
,
(2)
gdzie,
U
dz
– jest zbiorem możliwych do podjęcia dzia-
łań,
H – jest zbiorem możliwych wyników działań,
f
u
–
funkcja
użyteczności określona na iloczy-
nie kartezjańskim U
dz
× H.
Przekaz zasad dobrej praktyki morskiej, gdzie
opis obejmuje sposób postępowania wraz z rezulta-
tem, definiowany jest właśnie w formie tablic.
Zawarta w tablicach wiedza jest łatwa w aplikacji.
Sprowadza się ona do wyboru działania, co jest
o tyle ułatwione, iż tablica podaje wyniki wyboru.
Możliwe jest więc dopasowanie odpowiedniego
działania dla oczekiwanego wyniku.
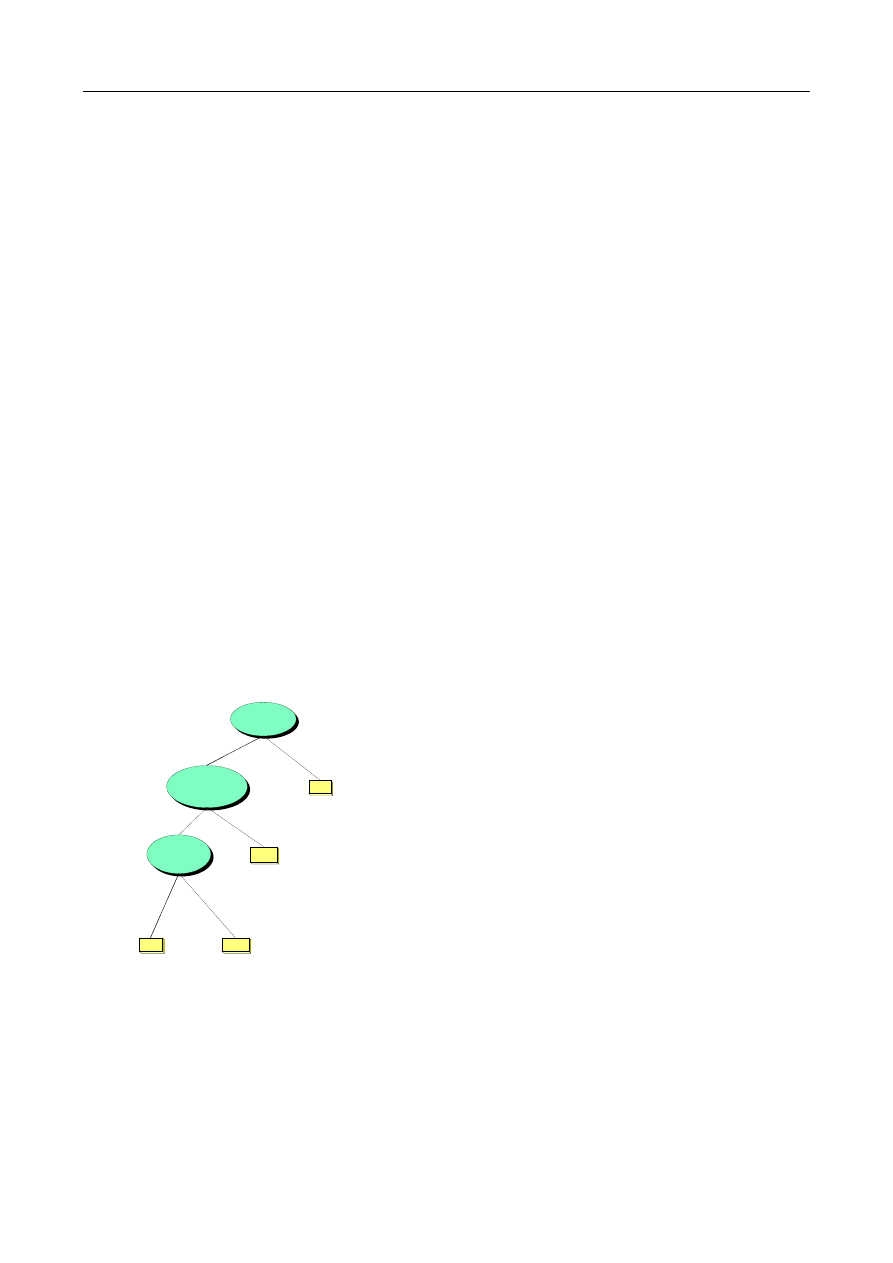
Drzewa decyzyjne
Wiedza niezbędna do podejmowana decyzji mo-
że być zapisywana w formie drzew decyzyjnych.
Polega ona na prezentowaniu sekwencji warunków
wpływających na decyzję końcową przez ścieżki
prowadzące od korzeni drzewa, poprzez węzły
(warunki), wzdłuż krawędzi (wynik sprawdzenia)
do liści (kategorie). Zobrazowano to na rysunku 5.
0
Namiar
Odległość do
obiektu
1
Nawigacja
0
1
Akwen otwarty
Rośnie
Maleje
Mała zmiana/stały
Zmiana
Akwen ograniczony
Rys.
5.
Drzewo decyzyjne dla dziedziny stan nawigacji
(0 – bezpiecznie, 1 – niebezpiecznie)
Fig. 5. Decision tree for the domain of navigational situation
(0 – safely, 1 – dangerously)
Przyjmując dla powyżej zaprezentowanego
przykładu notację:
N – dziedzina (przestrzeń) nawigacyjna;
W – zbiór wartości, W
t
= {w
1
, w
2
,... w
m
};
t – jest sprawdzeniem postaci, t : N
→ W
t
;
k – kategoria oceny bezpieczeństwa,
k = {0, 1}.
Wówczas ekstrakcję wiedzy nawigacyjnej
(ścieżkę decyzyjną) możemy wyrazić za pomocą
reguły:
( )
( )
( )
k
w
n
t
w
n
t
w
n
t
m
m
→
=
∧
∧
=
∧
=
...
2
2
1
1
(3
)
Baza wiedzy nawigacyjnej w systemie
wspomagania decyzji nawigacyjnej
na statku morskim
Duża liczba wypadków morskich spowodowana
jest błędem ludzkim. Należy rozumieć go jako nie-
powodzenie w uzyskaniu zaplanowanego wyniku
działania z powodu fizycznego lub intelektualnego
zaniedbania. Konsekwencje takich niepowodzeń
mogą być bardzo poważne. Najpoważniejszymi są
te prowadzące do kolizji, a popełniane są w proce-
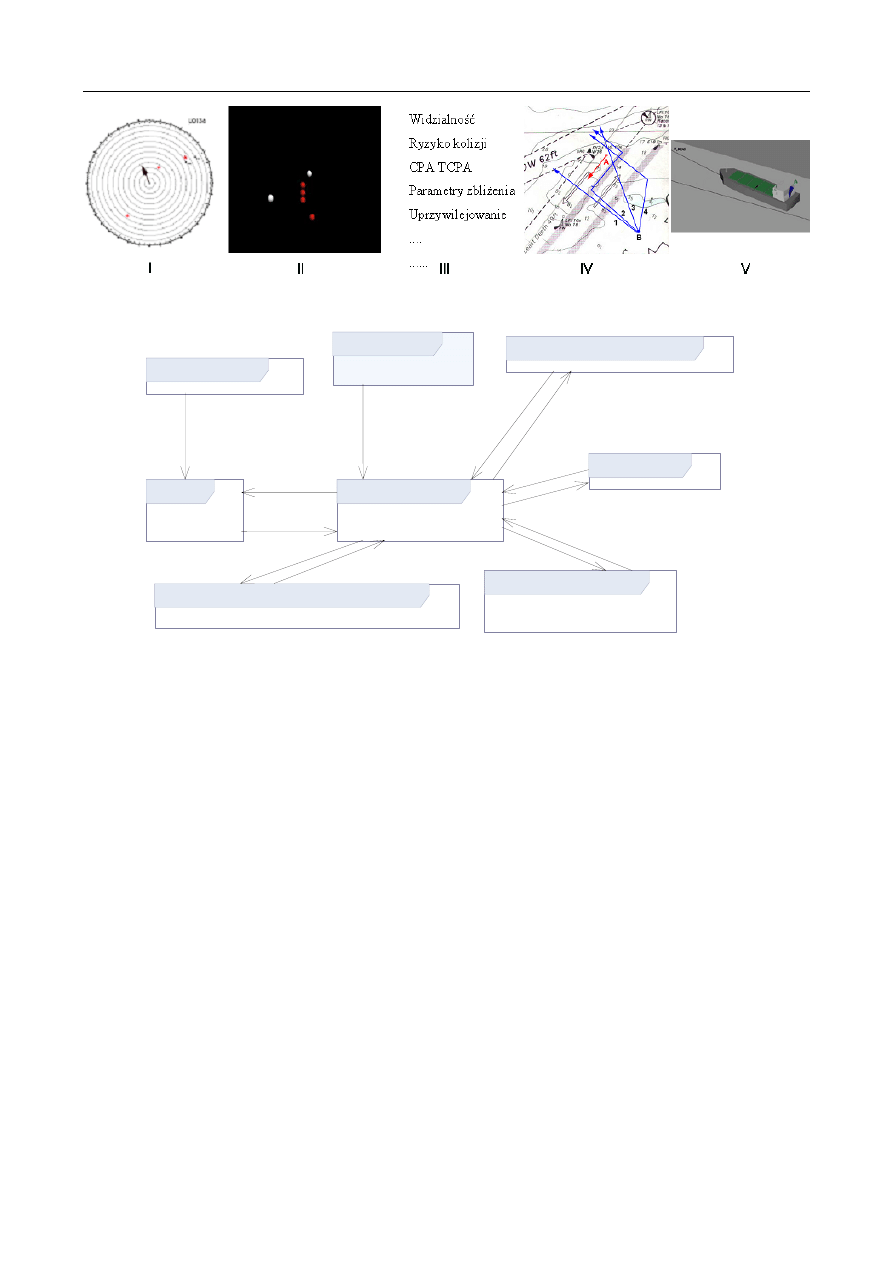
sie podejmowania decyzji nawigacyjnej. W proce-
sie tym możemy wyróżnić kolejno następujące po
sobie etapy (rys. 6):
– wystąpienie sytuacji nawigacyjnej (rys. 6–I),
– identyfikacja sytuacji nawigacyjnej (rys. 6– II),
– ocena sytuacji (porównania obrazu z wzorcem)
(rys. 6–III),
– zaplanowanie działania (rys. 6–IV),
– wykonanie planu (rys. 6–V).
Właściwe działanie w poszczególnych etapach
zmniejszy prawdopodobieństwo popełnienia błędu.
W prostej linii zależeć ono będzie od wiedzy nawi-
gatora oraz dostępnego czasu na realizację etapu
(np. zbyt krótki czas obserwacji doprowadzi do
niepełnego – błędnego obrazu sytuacji nawigacyj-
nej) i identyfikację poszczególnych etapów oraz
odpowiednie zachowanie się w nich. Błąd popeł-
niony na jakimkolwiek etapie, np. początkowym,
będzie się „akumulował”. Wpłynie on negatywnie
na działanie nawigatora we wszystkich kolejno po
sobie następujących etapach podejmowania decyzji.
W konsekwencji doprowadzi do niepożądanych
skutków (niepowodzenia w osiągnięciu planowa-
nych zamierzeń). Skuteczną metodą unikania błę-
dów jest praca według ustalonych standardów,
np. według instrukcji (procedur) albo praca pod
nadzorem lub praca zespołowa. Tak bywa np.
w zadaniach wykonywanych przez operatorów DP
(dynamic positioning), gdzie wachtę pełni nieprze-
rwanie dwóch operatorów. W tradycyjnej pracy
nawigacyjnej nawigatora prowadzącego samotnie
nawigację może wspierać (kontrolować?) system
wspomagania decyzji nawigacyjnej. System taki
(rys. 7) zapewni wsparcie nawigatorowi na wszyst-
kich etapach procesu podejmowania decyzji.
Akwen otwarty
Zmiana
Baza wiedzy nawigacyjnej
Zeszyty Naukowe 13(85)
97
Rys. 6. Zobrazowanie etapów podejmowania decyzji
Fig. 6. Illustration of the decision-taking stages
Rys. 7. Przykład architektury systemu wspomagania decyzji nawigacyjnej [4]
Fig. 7. Example of the architecture of the navigational decision support system [4]
Działanie systemu oparte jest na bazie wiedzy
nawigacyjnej. Jest ona zapisana w poszczególnych
modułach systemu i stanowi podstawę do realizacji
zadań systemu w poszczególnych etapach podej-
mowania decyzji nawigacyjnej.
Etap I – wystąpienie sytuacji nawigacyjnej.
Realizacja zadania odbywa się poprzez prezen-
tację na ekranie systemu faktów:
– informacji kartograficznej (wiedza zawarta
w bazach danych: ENC, WEND),
– informacji pozyskiwanych z sensorów (ARPA,
AIS, LRIT, NAVSAT itd.),
– innych informacji uznanych za istotne lub wy-
branych przez operatora.
Etap II – identyfikacja sytuacji nawigacyjnej
(rozpoznanie obiektów wraz z ich kategoryzacją).
Realizacja etapu odbywa się poprzez interakcję
z operatorem. W systemie znajduje się wiedza zapi-
sana w formie drzew decyzyjnych. Nawigator od-
powiadając na sekwencję warunków, dokonuje
identyfikacji sytuacji.
Niezależnie od powyższego system dokonuje
także automatycznej identyfikacji sytuacji dla usta-
lonych uprzednio warunków. Identyfikacji dokonu-
je się na podstawie zdefiniowanych zmiennych
globalnych, jak widzialność, odległość bezpieczna,
prędkość bezpieczna. Definiowanie odbywa się
manualnie z wykorzystaniem wiedzy zawartej w ta-
blicach decyzji. W dalszej kolejności system klasy-
fikuje sytuacje w oparciu o algorytmy klasyfikacji
przepisów prawa drogi morskiej (MPDM).
Etap III – ocena sytuacji nawigacyjnej.
Realizacja odbywa się z wykorzystaniem wie-
dzy i kryteriów stosowanych przez nawigatorów.
Możliwe są do zastosowania narzędzia sztucznej
inteligencji [5]. Sieci neuronowe, sieci neurorozmy-
te pozwalają podczas uczenia się zapisać wiedzę
praktyczną i kryteria oceny stosowane przez nawi-
gatora. Inną możliwością jest zastosowanie obsza-
rów jednostopniowych lub wielostopniowych wo-
kół statku (domen), które nawigator będzie chciał
utrzymać, wolnych od innych obiektów. Mogą to
być obszary opisane notacją lingwistyczną, jak:
Detekcja
Wypracowanie manewru
Moduł Zarządzający
Baza wiedzy: MPDM; kryteria oceny sytuacji
Statki na akwenie
Dane o rejsie
Dane o podróży
Moduł interakcji z operatorem
Ocena sytuacji
trajektoria
dane
o sytuacji
dane o ruchu
statków na
akwenie
plan podróży
trajektoria
zapytanie
reguły, kryteria
Plan podróży,
preferencje
nawigatora,
ograniczenia
decyzje
informacja o sytuacji
ocena
dane o sytuacji, reguły

Janusz Uriasz
98
Scientific Journals 13(85)
bardzo bezpiecznie (wymagane działanie: obserwa-
cja), bezpiecznie (wymagane działanie: obserwa-
cja), średnio bezpiecznie (wymagane działanie:
wzmożona obserwacja) itd.
Etap IV – zaplanowanie działania.
Realizacja odbywa się w module decyzyjnym.
System wypracowuje dla danej sytuacji nawigacyj-
nej manewr antykolizyjny. Uwzględniane są warto-
ści zmiennych globalnych (np. CPA).
Etap V – wykonanie działania.
System sygnalizuje moment rozpoczęcia plano-
wanego działania. Możliwe jest także prowadzenie
śledzenia zgodności wykonywanych manewrów
z proponowanymi. Realizacja odbywa się w modu-
le decyzyjnym z wykorzystaniem danych odbiera-
nych od sensorów.
Podsumowanie
Prawidłowo funkcjonujący system wspomagania
decyzji nawigacyjnej musi opierać się na wiedzy
nawigacyjnej. Może być ona reprezentowana
w wielu formach. Zależeć to będzie od jej rodzaju
oraz funkcji w systemie.
Systemy wspomagające będą znajdować coraz
większe zastosowanie w nawigacji morskiej. Doty-
czy to zarówno statków, jak i lądowych ośrodków
zarządzania i kontroli ruchu. Wynika to z oczeki-
wań oraz możliwości technologicznych (rodzaj,
właściwości i wyposażenie jednostek, infrastruktura
nawigacyjna), coraz większego zakresu działalności
na morzu (np. przemysł przybrzeżny). Zmiany mają
także bardziej formalne podłoże. Znajdują one
odzwierciedlenie w pracach IMO, Komisji Europej-
skiej (EMSA) wdrażających koncepcję e-nawigacji,
a nawet szerzej e-morza [6].
Bibliografia
1. K
OPACZ
Z., M
ORGAŚ
W., U
RBAŃSKI
J.: The Ship's Naviga-
tion Function, Ship's Navigation Processes, and Ship's Navi-
gational Information, Journal of Navigation, 2003.
2. H
ECHT
H.
AT AL
.: The WEND Concept for a Worldwide
ENC Database – Past and Future?, The International Hydro-
graphic Review, 2007, 8, 2.
3. P
IETRZYKOWSKI
Z.: Procesy decyzyjne w sterowaniu ruchem
statku. AM Szczecin 2003.
4. C
HOMSKI
J.
ET AL
.: Model systemu wspomagania decyzji
nawigacyjnych na statku morskim. Explo-Ship 2008, AM
Szczecin 2008.
5. B
ANACHOWICZ
A., U
RIASZ
J.: Ocena sytuacji nawigacyjnej
na torze wodnym z wykorzystaniem metod sztucznej inteli-
gencji. Problemy Automatyzacji w Geodezji Inżynieryjnej,
VI Konferencja Naukowo-Techniczna, Warszawa 2003.
6.
Confederation of European Shipmasters’ Associations.
CESMA newsletter, 2007, 39.
Recenzent:
dr hab. inż. Lucjan Gucma, prof. AM
Akademia Morska w Szczecinie
Wyszukiwarka
Podobne podstrony:
baza wiedzy linki
baza wiedzy przedsiębiorstwa-folie, Ekonomia, ekonomia
BAZA WIEDZY PRZEDSI BIORSTW, Inne
Macierze-dyskowe-RAID, Baza wiedzy, Teoria
10 Zał 10 Baza wiedzy psychologicznej
Baza wiedzy CRM
baza wiedzy przedsiębiorstwa folie 2
Nawigacja - baza pytań kursu PPL (A), Baza pytań PPL(A)
Janusz Marchewa 4Developers SQL Server nie tylko jako baza danych
Nawigacja fragmenty wykładu 4 ( PP 2003 )
wZ 2 Budowa wiedzy społecznej teoria schematów
II wyklad Interakcje i rodzaje wiedzy
Tradycyjne źródła wiedzy turystycznej
Konkurs wiedzy o Unii Europejskiej
hatala,januszyk grupa 2a prez 1
E nawigacja jako proces modelowania
Blek Bonus3 Baza gotowców
więcej podobnych podstron