Function Block Reference Manual
APP-RTT-B-GB
Sucosoft S
40
Application Software
Closed-Loop Control Toolbox, Basic Version
03/99 AWB 2700-1365 GB
1st published 1999, edition 03/99
© Moeller GmbH, Bonn
Author:
Rainer Tenhagen
Production: Ingo Meyer
Translators: Baker & Harrison, Terence Osborn

1
03/
99 AW
B
2700-
1365 G
B
Contents
1 Basic Information and Technical Data
General 3
Philosophy of the RTT
Technical data and other technical information 7
Additional tools for the RTT
3 Pulse Duration Modulator (PDM)
4 Miscellaneous Function Blocks
Two-point interpolation (scaling)

2
03/
99 AW
B
2700-
1365 G
B

3
03/
99 AW
B
2700-
1365 G
B
1
Basic Information and Technical Data
General
The basic version of the closed-loop control toolbox
(RTT) is a tool for programming with Sucosoft S 40 to
the IEC 1131-3 standard. Once installed, the toolbox
provides 9 function blocks under the menu item
“Symbols/User-defined function blocks”, each in
German and English. The basic version of the
toolbox covers the basic requirements for closed-
loop control such as a PID controller in conjunction
with a pulse duration modulator.
Should the user require further functions, the full
versions of the RTT are available in German and
English. The full versions contain approximately
100 function blocks from the following areas:
Mathematical and logical function blocks
Trigonometric functions
Exponentiation, root extraction
Interpolation
Basic blocks of closed-loop control
Integrator
DT1 system
Sinus oscillation
Hysteresis

Basic Information and
Technical Data
4
03/
99 AW
B
2700-
1365 G
B
Controllers
PID controller
PID split-range controller (heating/cooling)
Autotuning controller
PD three-step controller
Two-step controller
Three-step controller
Pulse duration modulation (PDM)
Conventional PDM
Dynamic PDM
Split-range PDM
Noise-shape PDM (suitable only for solid states)
Signal filters, processing and limitation
Tolerance limit monitors
Limit monitors
PT1 filters
PT3 filters
System simulation
Oscillatory PTn system simulation
Fuzzy systems
Fuzzy function blocks with 2 to 4 input variables
and 2, 3 or 5 terms per input variable
Which PLCs can be used with the RTT?
The RTT can be used on all PLCs that can be
programmed with Sucosoft S 40, e. g. PS 4-201,
PS 416 and PS 4-341.

Philosophy of the RTT
5
03/
99 AW
B
2700-
1365 G
B
Philosophy of the RTT
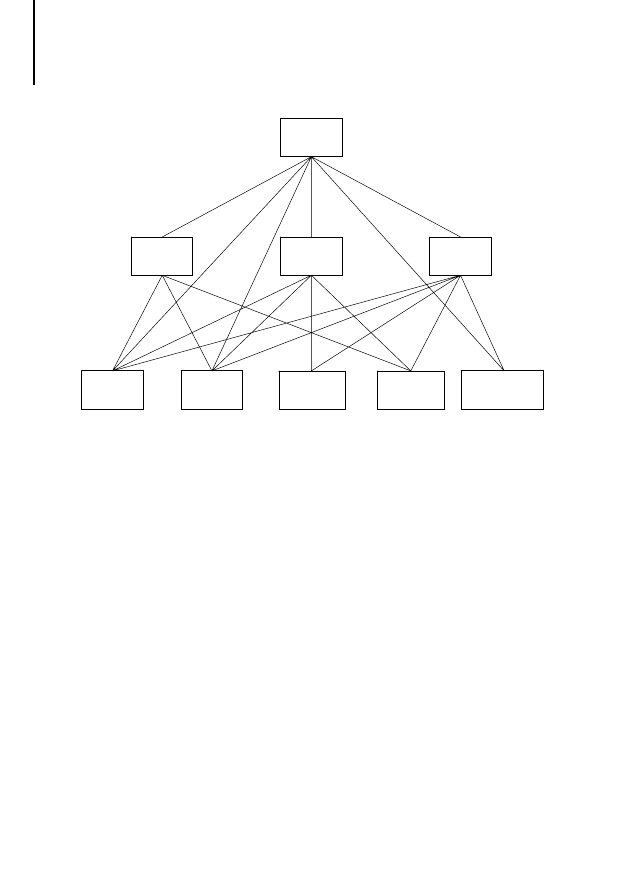
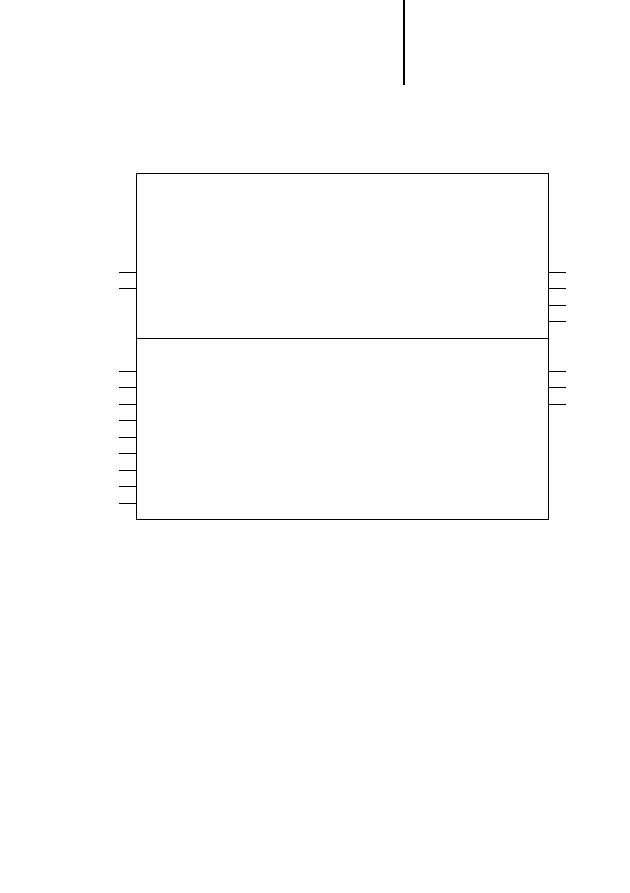
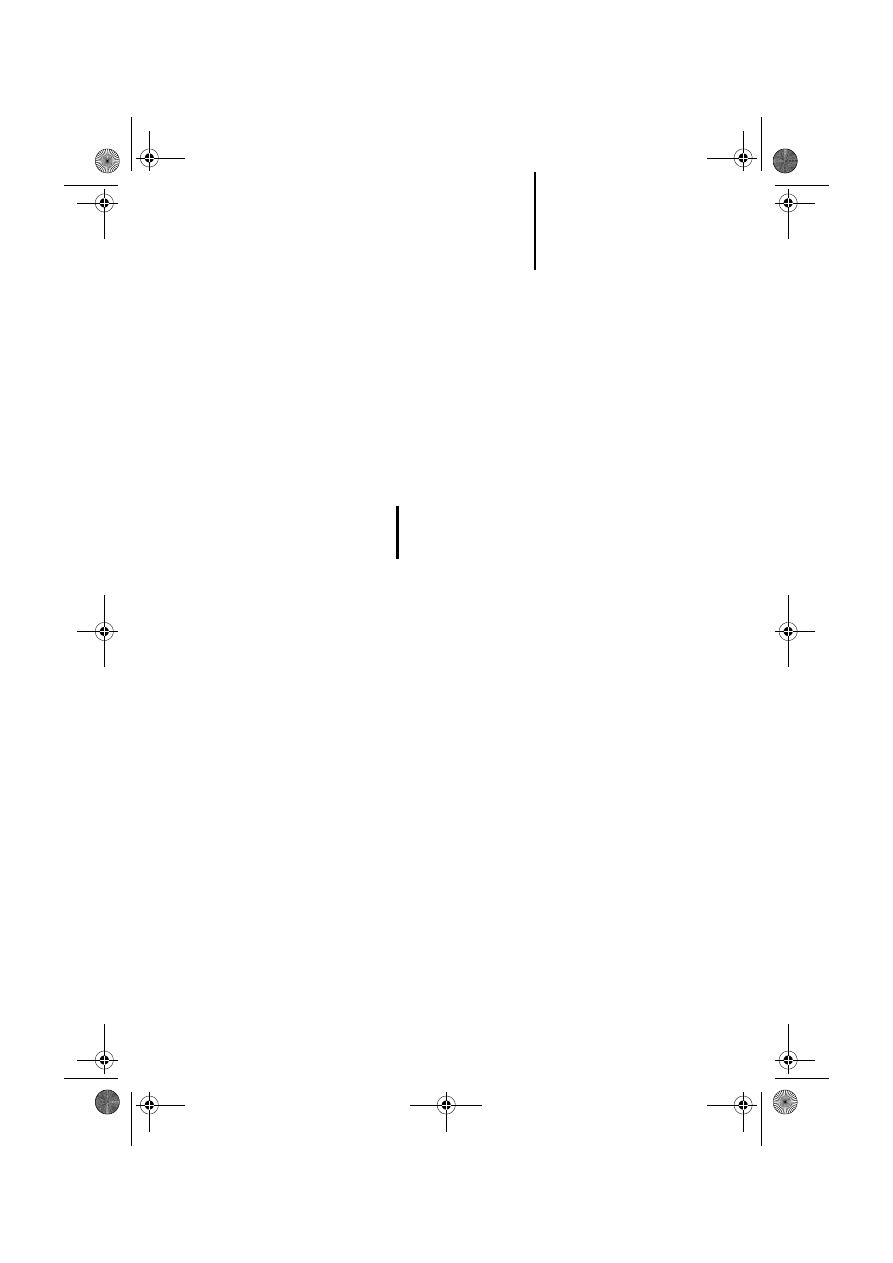
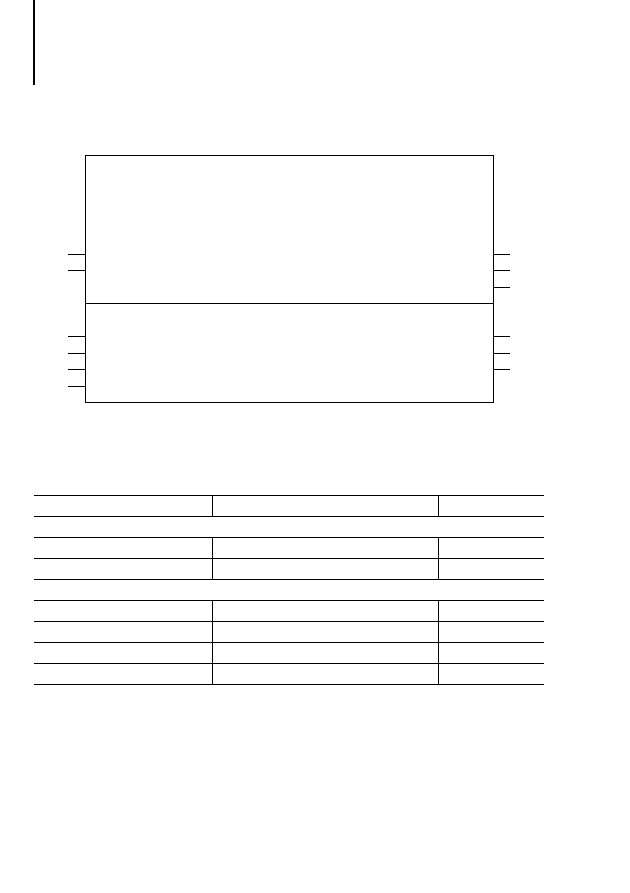
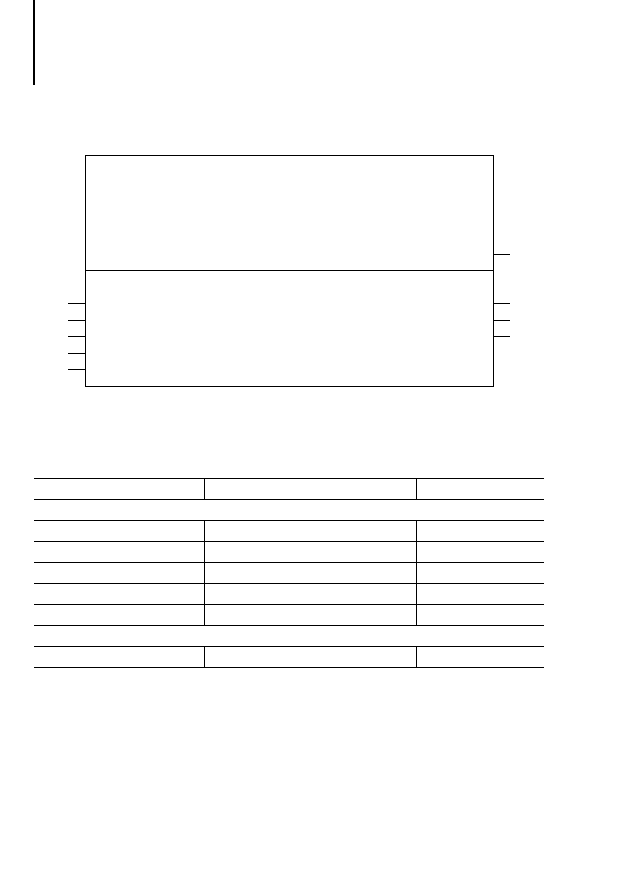
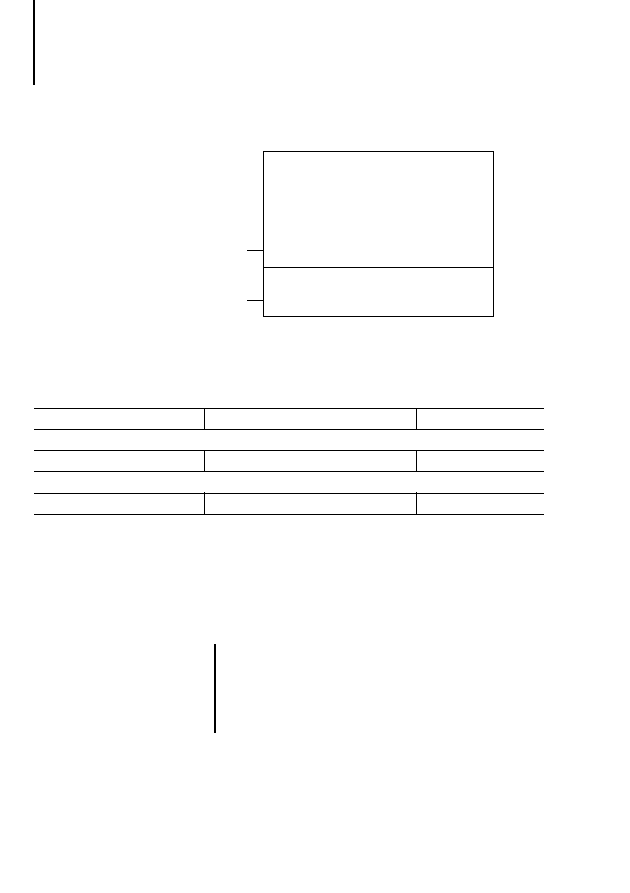
Hierarchical structure of the toolbox
The RTT is modular in structure and consists of
several hierarchical levels (see Figure 1). The function
blocks of the 1st level have basic functions such as
limiters or mathematical functions. Function blocks
of the 2nd level provide basic functions for closed-
loop control such as integrators or differentiating
elements. The 3rd level covers higher functions for
closed-loop control. In the example of the PID
controller (see Figure 1), you can see how function
blocks of the higher levels can access function
blocks of the lower levels.
The hierarchical, modular structure of the RTT
affords the following advantages:
Self-contained functions can be selectively
tested and optimized.
Since function blocks of the upper levels may
access function blocks of the lower levels
multiple times, relatively small code sizes arise in
comparison with non-modular programs.
Complex algorithms can be implemented very
quickly by combining the modular functions.
Because only tested function blocks are used, the
number of programming errors is relatively low.
Basic Information and
Technical Data
6
03/
99 AW
B
2700-
1365 G
B
Figure 1: Hierarchical arrangement of RTT function blocks
in multiple levels in the example of the PID controller
Self-explanatory variable and block names
The chosen variable and function block names of the
RTT are described in detail and are self-explanatory
so that programmers can use the RTT without
lengthy familiarisation. Most of the function blocks
can be integrated into the user program and
assigned parameters without the aid of the
documentation.
Parameter assignment instead of programming
Using the RTT means that the user’s task is one of
assigning parameters rather than creating a program.
This considerably reduces programming effort.
Level 3
Level 2
Level 1
D controller
Type conversion
Multiplication
I controller
Clock
generator
Addition
Limitation
P controller
PID
controller

Technical data and other
technical information
7
03/
99 AW
B
2700-
1365 G
B
Utilisation effort as low as possible, functionality
as high as possible
The effort of utilising the RTT function blocks should
be as low as possible for the user. As much
functionality as possible should be processed
automatically within the function block. The PID
controller, for example, has the follows functions:
anti-windup procedure
effective D computation (differentiation)
standardised control response
automatic definition of internal scanning time by
integrator and differentiator
smooth acceptance of manual setpoint
Technical data and
other technical
information
General information on code sizes and cycle time
requirements of RTT function blocks
Code is generated only once for each declared
function block. Where function blocks are instanced
(declared again with other instance names), only one
additional data field is created for each instance.
Because of the considerable code sizes in some
cases, the cycle time requirement of the RTT function
blocks is relatively large if PS 4-200 series PLCs are
used. A PID controller, for example, requires
approx. 10 ms PLC cycle time. If, for example,
30 control zones are necessary, long PLC cycle
times arise and/or the maximum cycle time is
exceeded.
Basic Information and
Technical Data
8
03/
99 AW
B
2700-
1365 G
B
In such cases, the program can be segmented so
that the controller is called for one zone only per PLC
cycle. The cycle time requirement when using a
PS 416 or PS 4-300 PLC is approx. 15 to 20 times
smaller.
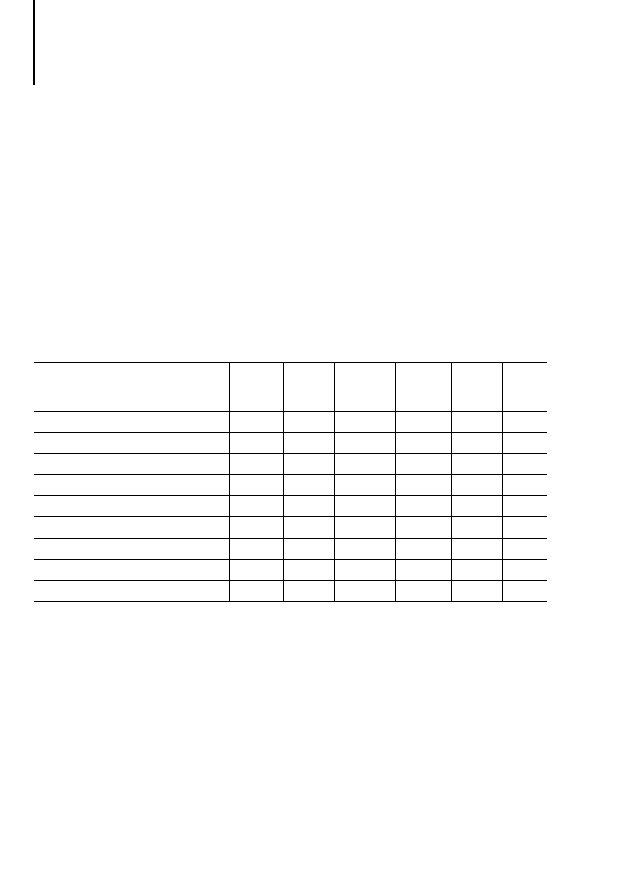
Technical data
The data apply to the PS 4-200 PLC types (subject to
change). The code sizes for the PS 416 and
PS 4-300 PLC types are approx. 20 % larger and the
cycle time requirement is approx. 15 to 20 times
smaller.
*
Function block stores data until the next call.
Multiple instancing is therefore required if the
function block is used multiple times.
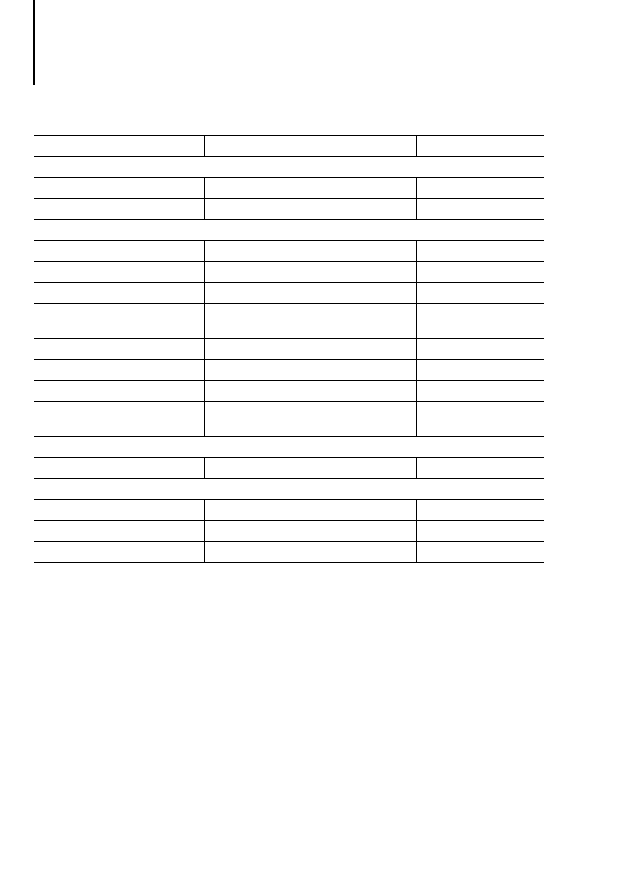
Function block name
Code
size
[bytes]
Data
size
[bytes]
Function
sub-
blocks
Instances Instance
depth
Cycle
time
[ms]
U_2_STEP_CONTROLLER*
758
132
2
2
1
1.29
U_3_STEP_CONTROLLER*
1058
144
2
2
1
2.11
U_IP2_INT_INTERPOLATION
3690
88
4
4
1
10.51
U_PD_THREE_STEP_CONTROLLER*
14754
431
17
29
3
8.19
U_PID_CONTROLLER*
17016
419
14
28
3
12.4
U_PT1_FILTER*
6674
152
11
12
2
1.77
U_PDM_CONTACTOR*
3582
68
4
4
1
0.43
U_RMS_RAMP*
10098
121
9
9
2
11.01
U_CYCS_CYCLETIME_SETPOINT_VALUE
418
104
2
2
1
0.73

Additional tools for the RTT
9
03/
99 AW
B
2700-
1365 G
B
Additional tools for
the RTT
Visualisation and parameter assignment tool
A visualisation and parameter assignment tool is a
useful addition to the RTT. Please refer to the
relevant readme file for more detailed information.
Visualisation:
A marker word area of the PLC can be read via the
Sucom A interface or EPC card (maximum 32 words).
The data can be processed as follows:
Numerical display
Graphic display (visualisation)
Storage in a file
Parameter assignment:
A marker word area of the PLC can be written via the
Sucom A interface or EPC card (maximum 32 words).
This function can be used for assigning parameters
to closed-loop controllers, for example.

10
03/
99 AW
B
2700-
1365 G
B
11
03/
99 AW
B
2700-
1365 G
B
2
Controllers
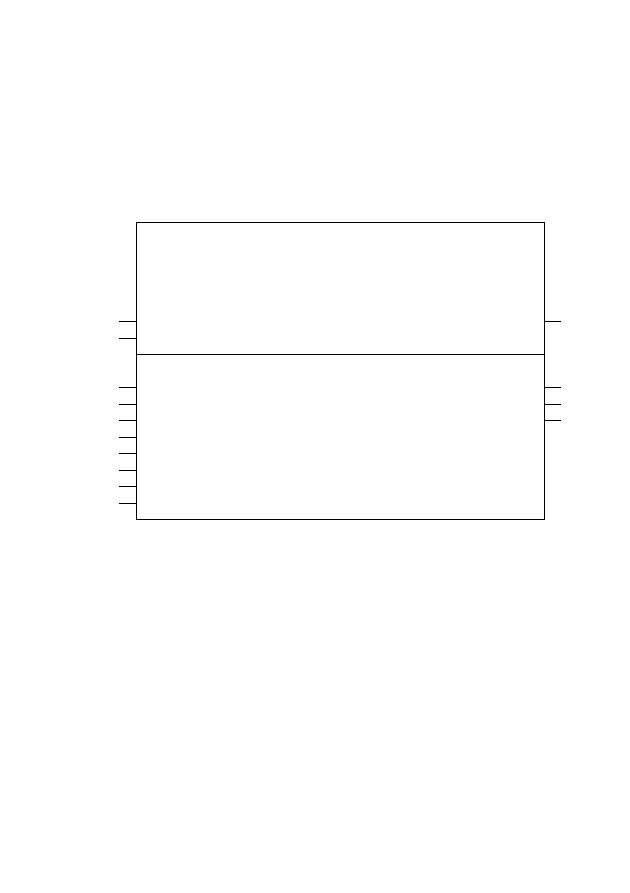
PID controller
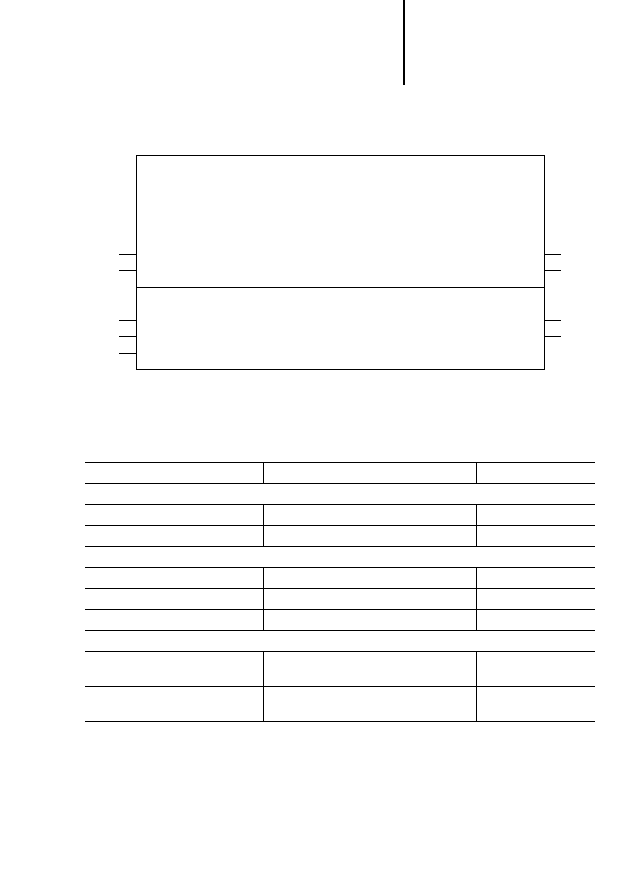
U_PID_controller
PID controller
Prototype of the function block
U_PID_controller
Inputs
Outputs
UINT
Setpoint_value_12Bit_UINT
Manipulated_variable_12Bit_UINT
UINT
UINT
Actual_value_12Bit_UINT
Parameters
Monitor outputs
BOOL
P_activate_BOOL
Manipulated_variable_P_13Bit_INT
INT
BOOL
I_activate_BOOL
Manipulated_variable_I_13Bit_INT
INT
BOOL
D_activate_BOOL
Manipulated_variable_D_13Bit_INT
INT
BOOL
Accept_manual_manipulated_variable_BOOL
UINT
Proportional_rate_P_percent_UINT
UINT
Reset_time_10ths_UINT
UINT
Derivate_action_time_10ths_UINT
UINT
Manual_manipulated_variable_12Bit_UINT
Controllers
12
03/
99 AW
B
2700-
1365 G
B
Meaning of the operands
Description
The components of the controller can be individually
activated (= enables the controller) or deactivated
with the BOOL variables “P_activate_BOOL”,
“I_activate_BOOL” and “D_activate_BOOL”. A reset
is automatically started when I or D components are
deactivated. The parameter assignment of the
controller is effected by means of the standard
variables proportional_rate [%], reset_time [0.1 s]
and derivate_action_time [0.1 s].
Designation
Meaning
Value range
Inputs
Setpoint_value_12Bit_UINT
Setpoint value
0 to 4095
Actual_value_12Bit_UINT
Actual value
0 to 4095
Parameters
P_activate_BOOL
Activates P component
0/1
I_activate_BOOL
Activates I component
0/1
D_activate_BOOL
Activates D component
0/1
Accept_manual_manipulated_
variable_BOOL
“Smooth” acceptance of manual
manipulated variable
0/1
Proportional_rate_P_percent_UINT Proportional rate Kp [%]
0 to 65535
Reset_time_10ths_UINT
Reset timeTn [0.1 s]
0 to 65535
Derivate_action_time_10ths_UINT
Derivative action time [0.1 s]
0 to 65535
Manual_manipulated_variable_
12Bit_UINT
Manual manipulated variable
0 to 4095
Outputs
Manipulated_variable_12Bit_UINT
Manipulated variable (analog, 12 bits)
0 to 4095
Monitor outputs
Manipulated_variable_P_13Bit_INT P manipulated variable component
–4095 to 4095
Manipulated_variable_I_13Bit_INT
I manipulated variable component
–4095 to 4095
Manipulated_variable_D_13Bit_INT D manipulated variable component
–4095 to 4095

PID controller
13
03/
99 AW
B
2700-
1365 G
B
The controller outputs the analog value
“manipulated_variable_12Bit_UINT”. The PID
components of the manipulated variable (from which
the total manipulated variable is obtained by addition)
are available as separate monitor outputs to allow
selective (remote) diagnosis of the control response.
Manual operation:
An “override” of the controller in manual operation
can be done with the corresponding BOOL and UINT
variables. If the status of
“accept_manual_manipulated_variable_BOOL”
goes to “1”, the controller outputs the variable
“manual_manipulated_variable_12Bit_UINT” to
“manipulated_variable_12Bit_UINT”. If the status of
“accept_manual_manipulated_variable_BOOL”
changes back to “0”, the controller accepts the
manual manipulated variable and continues the
control operation smoothly with this manipulated
variable.
Example program:
In the example program “zone2”, a PID controller is
called with the parameters:
Proportional rate = 1.2
Reset time = 30 s
Derivative action time = 3 s

Controllers
14
03/
99 AW
B
2700-
1365 G
B
Use of the function block
“U_PID_controller” in the program “zone2”
PROGRAM zone2
VAR
pid_controller_zone2 : U_PID_CONTROLLER;
setpoint_value_zone2 : UINT :=2500;
actual_value_zone2 : UINT;
enable_pid_controller : BOOL :=0;
enable_manual_manipulated_variable : BOOL := 0;
manual_manipulated_variable : UINT :=1000;
manipulated_variable_zone2 : UINT;
manipulated_variable_P_zone2 : INT;
manipulated_variable_I_zone2 : INT;
manipulated_variable_D_zone2 : INT;
END_VAR
CAL pid_controller_zone2(
setpoint_value_12Bit_UINT :=setpoint_value_zone2,
actual_value_12Bit_UINT :=actual_value_zone2,
P_activate_BOOL :=enable_pid_controller,
I_activate_BOOL :=enable_pid_controller,
D_activate_BOOL :=enable_pid_controller,
accept_manual_manipulated_variable_BOOL :=enable_manual_manipulated_variable,
proportional_rate_percent_UINT :=120,
reset_time_10ths_UINT :=300,
derivate_action_10ths_UINT :=30,
manual_manipulated_variable_12Bit_UINT :=manual_manipulated_variable_zone2
|
manipulated_variable_zone2 :=manipulated_variable_12Bit_UINT,
manipulated_variable_P_zone2 :=manipulated_variable_P_13Bit_INT,
manipulated_variable_I_zone2 :=manipulated_variable_I_13Bit_INT,
manipulated_variable_D_zone2 :=manipulated_variable_D_13Bit_INT
)
END_PROGRAM
PD three-step controller
15
03/
99 AW
B
2700-
1365 G
B
PD three-step
controller
U_PD_three_step_controller
PD controller with three-step action for
“opening” and “closing” valves
Prototype of the function block
U_PD_three_step_controller
Inputs
Outputs
UINT
Setpoint_value_12Bit_UINT
Open_BOOL
BOOL
UINT
Actual_value_12Bit_UINT
Close_BOOL
BOOL
Manipulated_variable_open_12Bit_UINT
UINT
Manipulated_variable_close_12Bit_UINT
UINT
Parameters
Monitor outputs
BOOL
P_activate_BOOL
Manipulated_variable_bipolar_13Bit_INT
INT
BOOL
D_activate_BOOL
Manipulated_variable_P_13Bit_INT
INT
BOOL
Accept_manual_manipulated_variable_BOOL
Manipulated_variable_D_13Bit_INT
INT
UINT
Proportional_rate_P_percent_UINT
UINT
Proportional_rate_D_percent_UINT
UINT
Derivate_action_time_10ths_UINT
UINT
Length_of_period_PDM_ms_UINT
UINT
Minimum_switch_on_time_PDM_ms_UINT
INT
Manual_manipulated_variable_13_Bit_INT
Controllers
16
03/
99 AW
B
2700-
1365 G
B
Meaning of the operands
Designation
Meaning
Value range
Inputs
Setpoint_value_12Bit_UINT
Setpoint value
0 to 4095
Actual_value_12Bit_UINT
Actual value
0 to 4095
Parameter
P_activate_BOOL
Activates P component
0/1
D_activate_BOOL
Activates D component
0/1
Accept_manual_manipulated_variable_BOOL Smooth acceptance of manual
manipulated variable
0/1
Proportional_rate_P_percent_UINT
P component proportional rate [%]
0 to 65535
Proportional_rate_D_percent_UINT
D component proportional rate [%]
0 to 65535
Derivate_action_time_10ths_UINT
Derivative action time [0.1 s]
0 to 65535
Length_of_period_PDM_ms_UINT
Length of period PDM [ms]
0 to 65535
Minimum_switch_on_time_PDM_ms_UINT
Minimum switch-on time PDM [ms]
0 to 65535
Manual_manipulated_variable_13_Bit_INT
Manual manipulated variable
–4095 to 4095
Outputs
Open_BOOL
Opens a valve, for example
0/1
Close_BOOL
Closes a valve, for example
0/1
Manipulated_variable_open_12Bit_UINT
Analog manipulated variable “open”
0 to 4095
Manipulated_variable_close_12Bit_UINT
Analog manipulated variable “close”
0 to 4095
Monitor outputs
Manipulated_variable_bipolar_13Bit_INT
Bipolar manipulated variable
–4095 to 4095
Manipulated_variable_P_13Bit_INT
P manipulated variable component
–4095 to 4095
Manipulated_variable_D_13Bit_INT
D manipulated variable component
–4095 to 4095

PD three-step controller
17
03/
99 AW
B
2700-
1365 G
B
Description
The controller is suitable for “integrating systems”,
i. e. systems without self-regulation where an I
component is unnecessary, e. g. for flow control with
a valve, whereby the following actions are possible:
open
close
pause (neither open nor close)
The P and D components of the controller can be
individually activated (= enables the controller) or
deactivated by the BOOL variables
“P_activate_BOOL” and “D_activate_BOOL”. A reset
of the D component is automatically started when
the D component is deactivated.
If “accept_manual_manipulated_variable_BOOL”
goes to “1”, the controller outputs
“manual_manipulated_variable_12Bit_INT” to
“manipulated_variable_12Bit_UINT”.
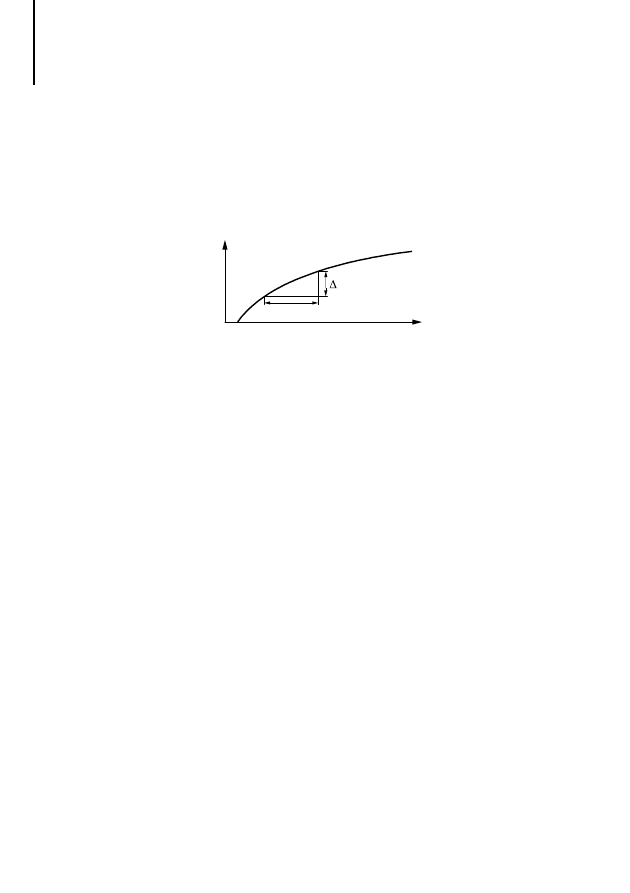
Parameter setting for the controller is done with the
variables proportional_rate_P_percent_UINT [%],
proportional_rate_D_percent_UINT [%] and
derivate_action_time_10ths_UINT [0.1 s]. For the
calculation of the D manipulated variable
component, a scanning time (
∆
t) is defined with the
derivative action time (see Figure 1). The actual value
changes are multiplied with the D proportional rate
parameter.
Controllers
18
03/
99 AW
B
2700-
1365 G
B
The following equation applies:
D manipulated variable component = D proportional
rate
⫻
∆
X
∆
X = current_actual_value –previous_actual_value
~ derivate_action_time
=> D manipulated variable component ~ derivative
action time
⫻ D proportional rate
Figure 2: Relationship of actual value changes to
derivative action time T
V
Example:
Derivative action time T
V
= 10 s
Proportional rate D = 500 %
Over a period of 10 s, the actual value has changed
by 100 increments
=> D manipulated variable = 100
⫻ 5 = 500
If you reduce derivate_action_time by a factor of 2
(5 s) and increase the D component rate by a factor
of 2 (1000 %), then the result in the above example is
an identical D manipulated variable, as follows:
=> D manipulated variable = 50
⫻ 10 = 500
The following points should be noted:
The smaller the derivative action time chosen, the
smaller the maximum change in the actual value
within this time.
=> The resolution of the D value calculation
decreases. => The D manipulated variable
become discontinuous.
The smaller the derivative action time chosen, the
faster must a current D value be calculated.
=> The D value calculation is delayed by the
derivative action time.
X
T
t
v
x
PD three-step controller
19
03/
99 AW
B
2700-
1365 G
B
For the digital outputs, “open_BOOL” and
“close_BOOL”, you must specify the period length and
minimum switch-on time of a pulse duration modulator
(PDM). The controller still provides the analog values
“manipulated_variable_close_12Bit_UINT” and
“manipulated_variable_close_12Bit_UINT” as output
variables. The PD components of the manipulated
variable (from which the total manipulated variable is
obtained by addition) are available as separate monitor
outputs to allow selective (remote) diagnosis of the
control response.
Minimum switch-on time
The ratio of “Period length/minimum switch-on time”
(“P/M”) determines which percentage manipulated
variables are not effective. As low a minimum switch-on
time as possible should be selected so that the “P/M”
is as high as possible. If, however, a very short switch-
on time is still not effective with the connected
actuators, these short switch-on phases should be
suppressed in order to save the hardware. The period
length should not be set too low.
Example:
The assignment of parameters to proportional_rate_D
and derivate_action_time causes the change in the
control deviation that establishes itself within 2000 s to
be factorised by 5 when calculating the D manipulated
variable component. The P manipulated variable
component is calculated from the control variance
multiplied by 0.8. The resulting “total manipulated
variable” (manipulated_variable_ bipolar_13Bit_INT)
acts as input signal of a pulse duration modulator with
a period length of one minute and a minimum switch-
on time of 3 s.
The ratio of “Period length/Minium switch-on
time” must not be too low since relatively large
manipulated variables may be suppressed.
H1365g.fm Seite 19 Mittwoch, 29. November 2000 3:08 15

Controllers
20
03/
99 AW
B
2700-
1365 G
B
Use of the function block
“U_PD_three_step_controller”
in the program “valve1“
PROGRAM valve1
VAR
valve_1 : U_PD_three_step_controller;
setpoint_value_valve1 : UINT :=2000;
actual_value_valve1 AT %IAW0.0.0.4 : WORD;
enable_controller_valve1 : BOOL;
enable_manual_variable_valve1 : BOOL;
manual_manipulated_variable_valve1 : INT :=1500;
open_valve1 AT %Q0.0.0.0.0 : BOOL;
close_valve1 AT %Q0.0.0.0.1 : BOOL;
END_VAR
ld
actual_value_valve1
WORD_TO_UINT
st
valve_1.actual_value_12Bit_UINT
CAL valve_1(
setpoint_value_12Bit_UINT :=setpoint_value_valve1,
actual_value_12Bit_UINT :=,
P_activate_BOOL :=enable_controller_valve1,
D_activate_BOOL :=enable_controller_valve1,
accept_manual_manipulated_variable_BOOL :=enable_manual_variable_valve1,
proportional_rate_P_percent_UINT :=80,
proportional_rate_D_percent_UINT :=500,
derivate_action_time_10ths_UINT :=20000,
length_of_period_PDM_ms_UINT :=60000,
minimum_switch_on_timePDM_ms_UINT :=3000,
manual_manipulated_variable_13_Bit_INT :=manual_manipulated_variable_valve1
|
open_valve1 :=open_BOOL,
close_valve1 :=close_BOOL,
:=manipulated_variable_open_12Bit_UINT,
:=manipulated_variable_close_12Bit_UINT,
:=manipulated_variable_bipolar_13Bit_INT,
:=manipulated_variable_P_13Bit_INT,
:=manipulated_variable_D_13Bit_INT
)
END_PROGRAM
Two-step controller
21
03/
99 AW
B
2700-
1365 G
B
Two-step controller
U_2_step_controller
Two-step controller
Prototype of the function block
Meaning of the operands
U_2_step_controller
Inputs
Outputs
INT
Setpoint_value_INT
Control_signal_bottom_BOOL
BOOL
INT
Actual_value_INT
Control_signal_top_BOOL
BOOL
Parameters
Monitor outputs
BOOL
Activate_BOOL
Lower_switchover_point_INT
INT
INT
Switchover_point_offset_bottom_INT
Upper_switchover_point_INT
INT
INT
Switchover_point_offset_top_INT
Designation
Meaning
Value range
Inputs
Setpoint_value_INT
Setpoint value
–16383 to 16383
Actual_value_INT
Actual value
–16383 to 16383
Parameters
Activate_BOOL
Activates the controller
0/1
Switchover_point_offset_bottom_INT Relative offset of bottom switchover point
–16383 to 16383
Switchover_point_offset_top_INT
Relative offset of top switchover point
–16383 to 16383
Outputs
Control_signal_bottom_BOOL
Control signal for undershoot of bottom
switchover point
0/1
Control_signal_top_BOOL
Control signal for overshoot of top
switchover point
0/1
Controllers
22
03/
99 AW
B
2700-
1365 G
B
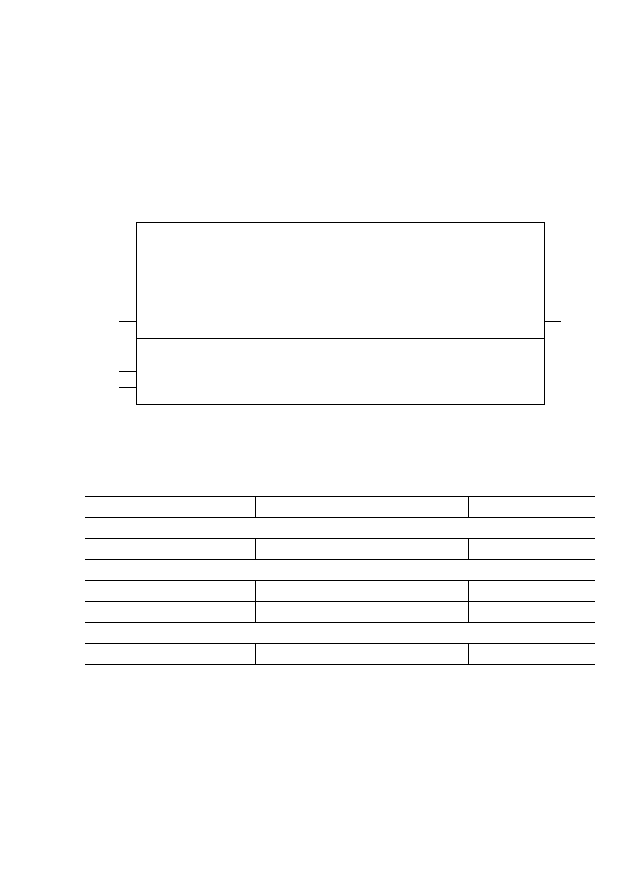
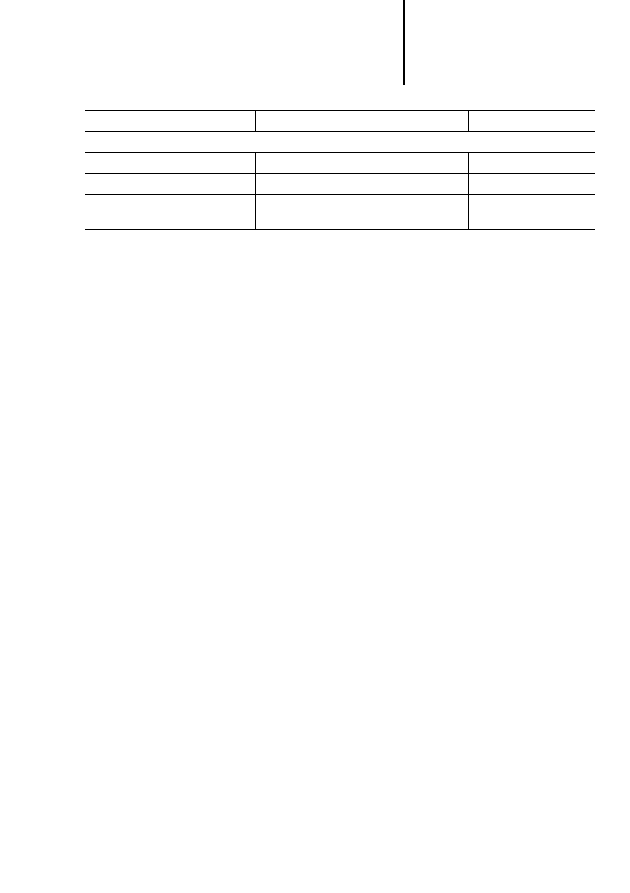
Description
The function block is activated with
“activate_BOOL=1” (= enables the controller). On
deactivation, the value “0” is output by both control
signal outputs. The function block calculates the
lower and upper switchover points by adding the
setpoint value and the respective switchover point
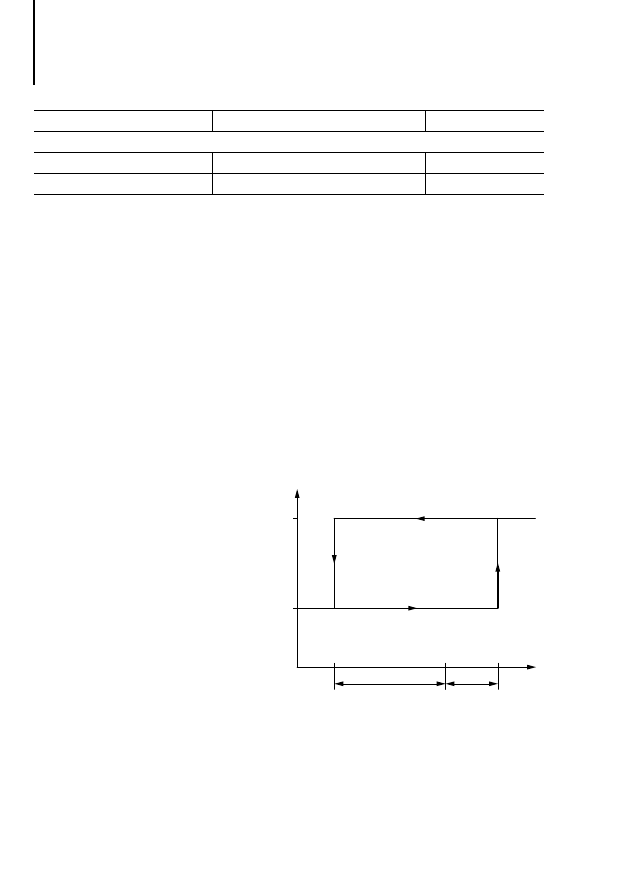
offsets (see Figure 3).
If the upper switchover point is exceeded,
“control_signal_top_BOOL” goes to “1” and if the
lower switchover point is undershot,
“control_signal_bottom_BOOL” goes to “1”. The
other control signal in each case goes to “0”.
Figure 3: Switchover of the 2-step controller with
hysteresis
Monitor outputs
Lower_switchover_point_INT
Lower switchover point
–32768 to 32767
Upper_switchover_point_INT
Upper switchover point
–32768 to 32767
Designation
Meaning
Value range
Setpoint
Actual
value
Control_signal_top
Control_signal_bottom
Lower switchover
point
Switchover point [SPOFF]
offset bottom
SPOFF top
Upper switchover
point
Two-step controller
23
03/
99 AW
B
2700-
1365 G
B
Example:
The following switchover points are assigned for the
2-step controller with the parameters shown below:
Lower switchover point = 2000 – 200 = 1800
Upper switchover point = 2000 + 300 = 2300
Use of the function block
“U_2_step_controller” in the program “two_step”
PROGRAM two_step
VAR
Two_step_controller: U_2_step_controller;
setpoint : INT :=2000;
actual AT %IAW0.0.0.4 : WORD;
enable_controller : BOOL;
digital_output_0_0 AT %Q0.0.0.0.0 : BOOL;
digital_output_0_1 AT %Q0.0.0.0.1 : BOOL;
END_VAR
ld
actual
WORD_TO_INT
st
Two_step_controller.actual_value_INT
CAL Two_step_controller(
setpoint_value_INT :=setpoint,
actual_value_INT :=,
activate_BOOL :=enable_controller,
switchover_point_offset_bottom_INT :=-200,
switchover_point_offset_top_INT :=300
|
digital_output_0_0 :=control_signal_bottom_BOOL,
digital_output_0_1 :=control_signal_top_BOOL,
:=lower_switchover_point_INT,
:=top_switchover_point_INT)
END_PROGRAM
Controllers
24
03/
99 AW
B
2700-
1365 G
B
Three-step controller
U_3_step_controller
Three_step controller
Prototype of the function block
Meaning of the operands
U_3_step_controller
Inputs
Outputs
INT
Setpoint_value_INT
Control_signal_bottom_BOOL
BOOL
INT
Actual_value_INT
Control_signal_Mitte_BOOL
BOOL
Control_signal_top_BOOL
BOOL
Parameters
Monitor outputs
BOOL
Activate_BOOL
Lower_switchover_point_INT
INT
INT
Switchover_point_offset_ bottom_INT
Intermediate_switchover_point_INT
INT
INT
Switchover_point_offset_middle_INT
Upper_switchover_point_INT
INT
INT
Switchover_point_offset_top_INT
Designation
Meaning
Value range
Inputs
Setpoint_value_INT
Setpoint value
–16383 to 16383
Actual_value_INT
Actual value
–16383 to 16383
Parameters
Activate_BOOL
Activation of controller
0/1
Switchover_point_offset_bottom_INT Relative offset of lower switchover point
–16383 to 16383
Switchover_point_offset_middle_INT Relative offset of intermediate switchover point –16383 to 16383
Switchover_point_offset_top_INT
Relative offset of upper switchover point
–16383 to 16383
Three-step controller
25
03/
99 AW
B
2700-
1365 G
B
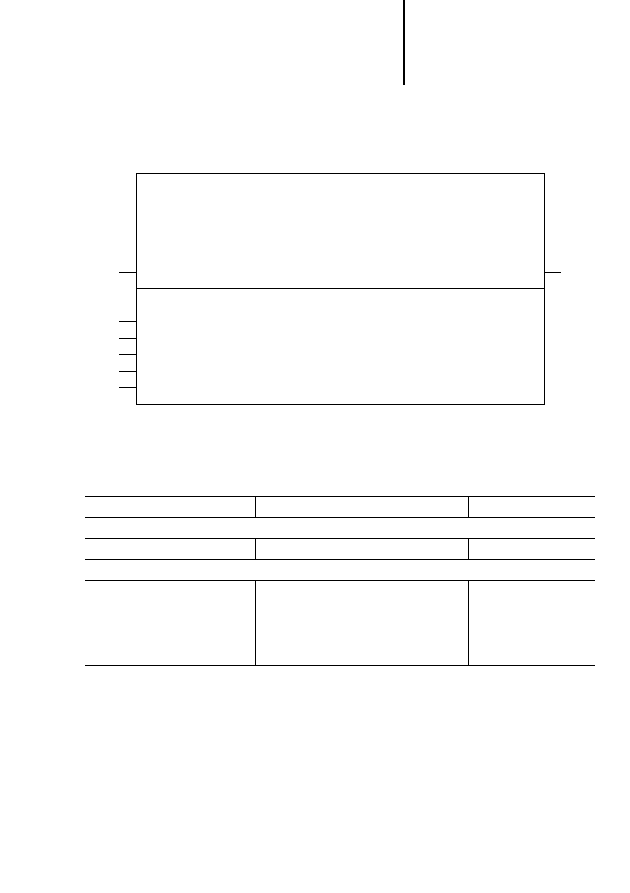
Description
The function block is activated with
“activate_BOOL=1” (= enables the controller). On
deactivation, the value “0” is output by the three
control signal outputs. The function block calculates
the lower, intermediate and upper switchover points
by adding the setpoint value and the respective
switchover point offsets (see Figure 4).
If the top switchover point is overshot,
“control_signal_top_BOOL” goes to “1” and if the
lower switchover point is undershot,
“control_signal_bottom_BOOL” goes to “1”.
Outputs
Control_signal_bottom_BOOL
Control signal for undershoot of lower
switchover point
0/1
Control_signal_middle_BOOL
Control signal for overshoot of intermediate
switchover point and
“control_signal_bottom_BOOL=1 or
undershoot of intermediate switchover point
and “control_signal_top_BOOL=1”
0/1
Control_signal_top_BOOL
Control signal for overshoot of upper
switchover point
0/1
Monitor outputs
Lower_switchover_point_INT
Lower switchover point
–32768 to 32767
Intermediate_switchover_point_INT
Intermediate switchover point
–32768 to 32767
Upper_switchover_point_INT
Upper switchover point
–32768 to 32767
Designation
Meaning
Value range
Controllers
26
03/
99 AW
B
2700-
1365 G
B
“control_signal_middle_BOOL” goes to “1” in the
following cases:
The intermediate switchover point is exceeded
and “control_signal_bottom_BOOL=1”
The intermediate switchover point is undershot
and “control_signal_top_BOOL=1”
The other control signals in each case go to “0”.
Figure 4: Switchover of 3-step controller with hysteresis
Example:
The following switchover points are assigned for the
3-step controller with the parameters shown below:
Lower switchover point = 2000 – 200 = 1800
Intermediate switchover point= 2000 – 50= 1950
Upper switchover point = 2000 + 100 = 2100
Actual
value
SPOFF
middle
Control_signal_middle
Control_signal_bottom
Control_signal_top
Setpoint
Lower switchover
point
Middle switchover
point
Upper switchover
point
Switchover point [SPOFF]
offset bottom
SPOFF
top

Three-step controller
27
03/
99 AW
B
2700-
1365 G
B
Use of the function block
“U_3_step_controller” in the program “threestep”
PROGRAM threestep
VAR
three_step_controller : U_3_step_controller;
setpoint : INT :=2000;
actual AT %IAW0.0.0.4 : WORD;
enable_controller : BOOL;
digital_output_0_0 AT %Q0.0.0.0.0 : BOOL;
digital_output_0_1 AT %Q0.0.0.0.1 : BOOL;
digital_output_0_2 AT %Q0.0.0.0.2 : BOOL;
END_VAR
ld
actual
WORD_TO_INT
st
three_step_controller.actual_value_INT
CAL three_step_controller(
setpoint_value_INT :=setpoint,
actual_value_INT :=,
activate_BOOL :=enable_controller,
switchover_point_offset_bottom_INT :=-200,
switchover_point_offset_middle_INT :=-50,
switchover_point_offset_top_INT :=100
|
digital_output_0_0 :=control_signal_bottom_BOOL,
digital_output_0_1 :=control_signal_middle_BOOL,
digital_output_0_2 :=control_signal_top_BOOL,
:=lower_switchover_point_INT,
:=intermediate_switchover_point_INT,
:=top_switchover_point_INT)
END_PROGRAM

28
03/
99 AW
B
2700-
1365 G
B
29
03/
99 AW
B
2700-
1365 G
B
3
Pulse Duration Modulator (PDM)
PDM
U_PDM_contactor
Pulse duration modulator suitable for contactors
Prototype of the function block
Meaning of the operands
U_PDM_contactor
Inputs
Outputs
UINT
Manipulated_variable_12Bit_UINT
Output_BOOL
BOOL
Parameters
BOOL
Activate_BOOL
UINT
Length_of_period_ms_UINT
UINT
Minimum_switch_on_time_ms_UINT
Designation
Meaning
Value range
Inputs
Manipulated_variable_12Bit_UINT
12-bit input variable of the PDM
(usually the output variable of a controller)
0 to 4095
Parameters
Activate_BOOL
Enables the PDM
0/1
Length_of_period_ms_UINT
Period length [ms]
0 to 65535
Minimum_switch_on_time_ms_UINT Minimum switch-on time [ms]
0 to 65535
Outputs
Output_BOOL
Digital output of the PDM
0/1
Pulse Duration Modulator
(PDM)
30
03/
99 AW
B
2700-
1365 G
B
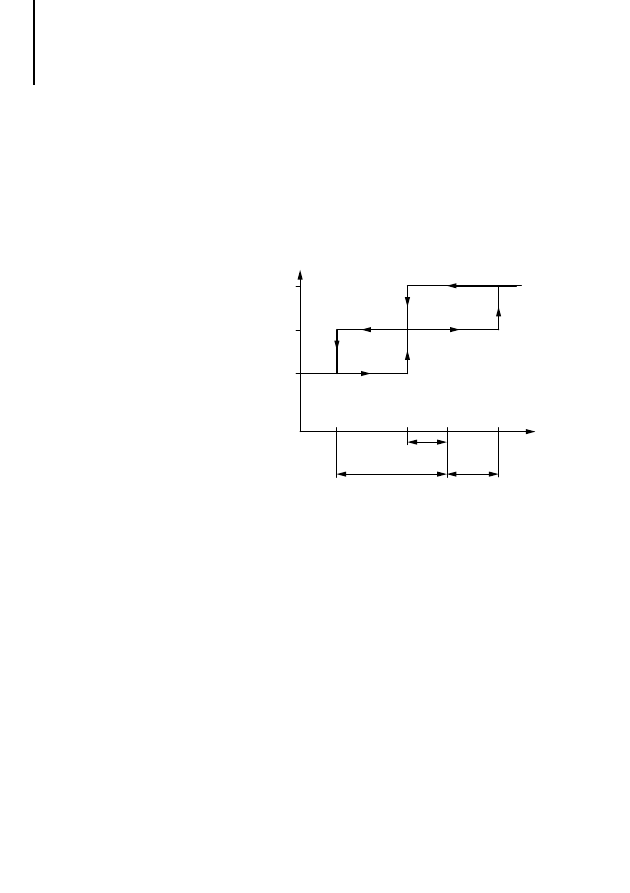
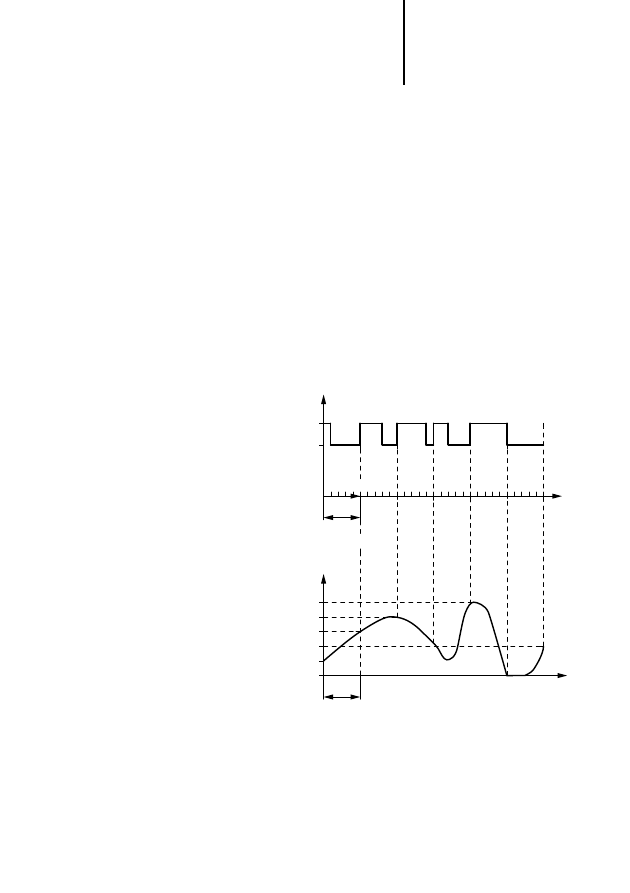
Description
The function block “U_PDM_contactor” is suitable
for connecting to mechanically switched contactors.
The PDM is normally logically combined with the
12-bit manipulated variable (4095 = 100 %) of a
controller. The variable “manipulated_variable
_12Bit_UINT” is provided for this reason in the input
section.
When “activate_BOOL=1”, the PDM is started and
one pulse duration is output with “output_BOOL=1”
(see Figure 5) if the specified minimum switch-on
time is exceeded. When “activate_BOOL=0”, the
output signal is set to zero and a reset of the current
actions is performed. In the event of reactivation, a
new period length starts. The period length and
minimum switch-on time can be specified in ms. The
maximum value of 65535 thus corresponds to a time
of 65.535 s..
Minimum switch-on time
The ratio of “Period length/minimum switch-on time”
(“P/M”) determines which percentage manipulated
variables are not effective. As low a minimum switch-
on time as possible should be selected so that the
“P/M” is as high as possible. If, however, a very short
switch-on time is still not effective with the
connected actuators, these short switch-on phases
should be suppressed in order to save the hardware.
The period length should not be set too low.
The ratio of “Period length/Minium switch-on
time” must not be too low since relatively large
manipulated variables may be suppressed.
PDM
31
03/
99 AW
B
2700-
1365 G
B
Examples:
Heater/Contactor
=> Minimum switch-on time = 1 s
=> Period length = 40 s
=> Manipulated variables less than 2.5 % are
suppressed
Heater/Solid state relay
=> Minimum switch-on time = 0 s
=> Period length = 20 s
=> No manipulated variables suppressed
Fan/contactor or solid state relay
=> Minimum switch-on time = 2 s
=> Period length = 40 s
=> Manipulated variables less than 5 % suppressed
Figure 5: Pulse duration modulation in dependency on the
manipulated variable of a controller
1
0
20 40 60 80 100
[%]
t [s]
t [s]
0
20
40
60
80
100
PWM
Output
PWM
period length
Manipulated
variable [%]
PWM
period length

Pulse Duration Modulator
(PDM)
32
03/
99 AW
B
2700-
1365 G
B
Example:
In the example program, a pulse duration modulator
is connected to a PID controller of the same zone by
connecting the 12-bit manipulated variable of the
controller to the input of the PDM. The period length
is set to 60 s and the minimum switch-on time is set
to 3 s.
Use of the function block
“U_PDM_contactor” in the program “zone1pdm”
PROGRAM zone1pdm
VAR
puls_duration_modulator : U_PDM_CONTACTOR ;
manipulated_variable_PID_controller1 : UINT ;
enable_zone1 AT %I0.0.0.0.0 : BOOL ;
digital_output_zone1 AT %Q0.0.0.0.0 : BOOL ;
END_VAR
CAL pulse_duration_modulator(
manipulated_variable_12Bit_UINT
:=manipulated_variable_PID_controller1
activate_BOOL :=enable_zone1,
length_of_period_PDM_ms_UINT :=60000,
minimum_switch_on_time_PDM_ms_UINT :=3000
|
digital_output_zone1 :=output_BOOL
)
END_PROGRAM
33
03/
99 AW
B
2700-
1365 G
B
4
Miscellaneous Function Blocks
PT1 signal smoothing
filter
U_PT1_filter
PT1 filter for signal smoothing
Prototype of the function block
Meaning of the operands
U_PT1_filter
Inputs
Outputs
UINT
Input_value_12Bit_UINT
Delay_value_12Bit_UINT
UINT
Parameters
BOOL
Activate_BOOL
UINT
Delay_time_Tg_10thsec_UINT
Designation
Meaning
Value range
Inputs
Input_value_12Bit_UINT
Input value
0 to 4095
Parameters
Activate_BOOL
Activates the function block
0/1
Delay_time_Tg_10thsec_UINT
Delay time Tg
0 to 65535
Outputs
Delay_value_12Bit_UINT
PT1-delayed output value
0 to 4095
Miscellaneous Function
Blocks
34
03/
99 AW
B
2700-
1365 G
B
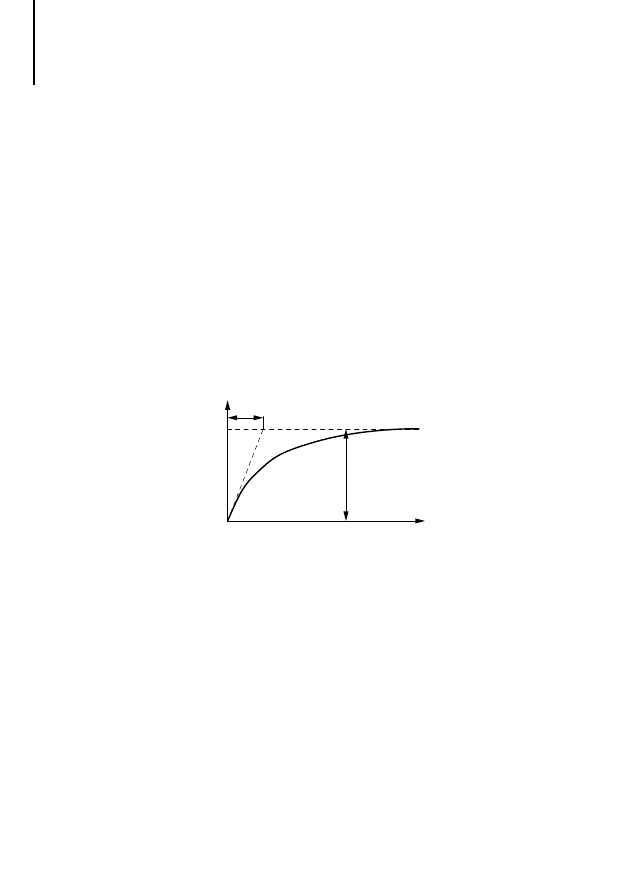
Description
The function block can be used to smooth noisy
signals. The time period over which the smoothing
process takes place is set with
“delay_time_Tg_10thsec_UINT” (see Figure 6). The
delay time should not be set longer than necessary
since the signals will be delayed more than is
necessary for smoothing (unavoidable side-effect of
signal smoothing). The function block is started with
“activate_BOOL=1”. A reset is effected with
“activate_BOOL=0”. In order to accelerate the PT1
startup behaviour, the first call of the function block
after a reset (or the first PLC cycle) causes
“delay_value_12Bit_UINT” to be initialised with the
input value (the PT1 delay does not start at zero).
Figure 6: PT1 delay of the filter in dependence on T
g
and
the input step X
e
Example:
In the example program “pt1smooth”, the “noisy”
actual value is smoothed over a time period of half a
second.
X
e
x
t
g
T

PT1 signal smoothing filter
35
03/
99 AW
B
2700-
1365 G
B
Use of the function block
“U_PT1_filter” in the program “pt1smooth”
PROGRAM pt1smooth
VAR
pt1_filter : U_pt1_filter ;
actual_value_high_noise at %IW0.0.0.0 : UINT ;
actual_value_smoothed: UINT ;
END_VAR
CAL pt1_filter(
input_value_12Bit_UINT :=actual_value_high_noise,
activate_BOOL :=1,
delay_time_Tg_10thsec_UINT :=5
|
actual_value_smoothed :=delay_value_12Bit_UINT
)
END_PROGRAM
Miscellaneous Function
Blocks
36
03/
99 AW
B
2700-
1365 G
B
Ramp function
U_RMS_ramp
Ramp with millisecond input value
Prototype of the function block
Meaning of the operands
U_rms_ramp
Outputs
Ramp_value_INT
INT
Parameters
Monitor outputs
BOOL
Activate_BOOL
End_value_attained_BOOL
BOOL
BOOL
Interrupt_BOOL
Ramp_sequence_time_ms_UINT
UINT
INT
Start_value_INT
Ramp_time_overshoot_ms_UINT
UINT
INT
End_value_INT
UINT
Ramp_time_ms_UINT
Designation
Meaning
Value range
Parameters
Activate_BOOL
Activates ramp generation
0/1
Interrupt_BOOL
Interrupts ramp generation
0/1
Start_value_INT
Start value of ramp
–32768 to 32767
End_value_INT
End value of ramp
–32768 to 32767
Ramp_time_ms_UINT
Ramp time from start value to end value
0 to 65535
Outputs
Ramp_value_INT
Ramp value
–32768 to 32767
Ramp function
37
03/
99 AW
B
2700-
1365 G
B
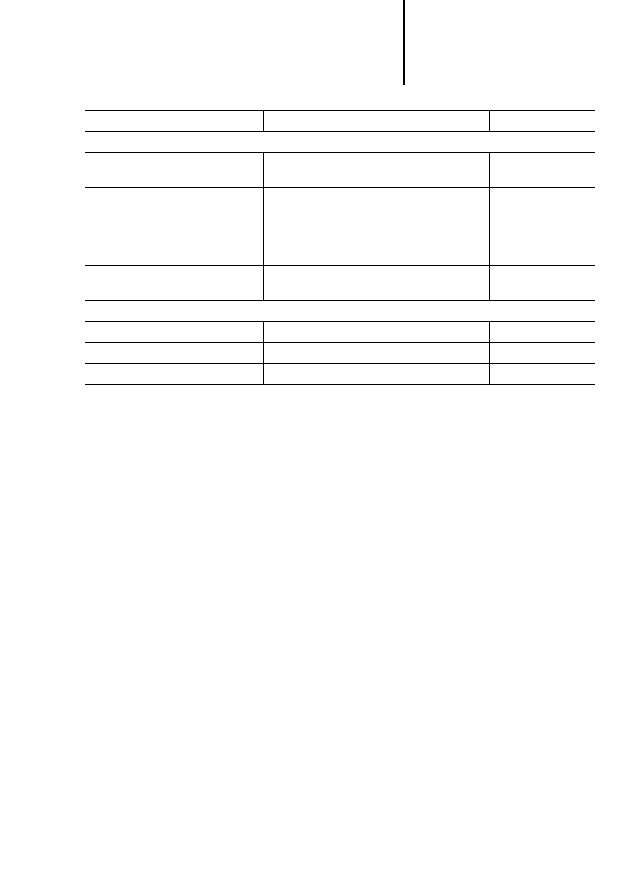
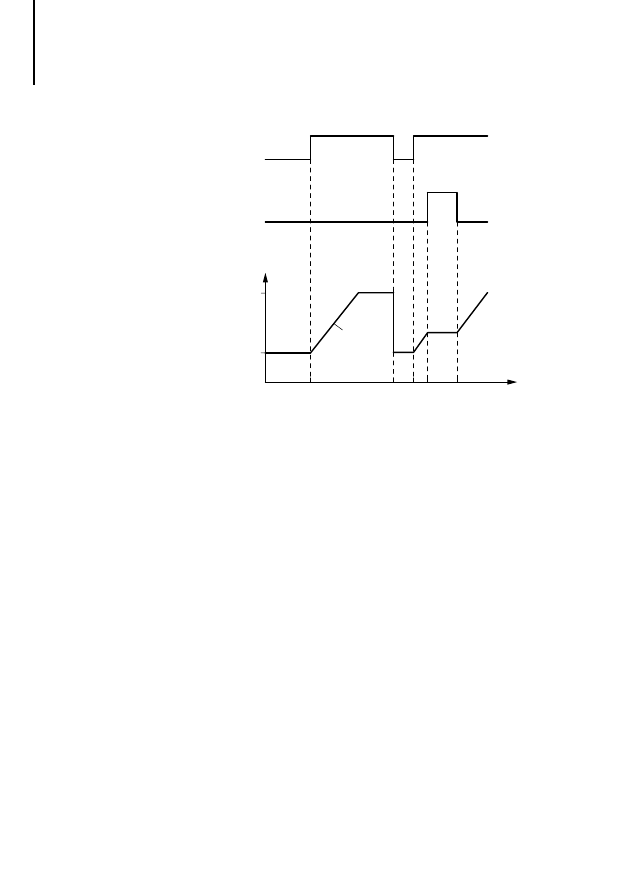
Description
When the function block is enabled by a rising edge
on “activate_BOOL”, it generates a ramp specified
by a start value, an end value and a ramp time
specified in ms (see Figure 7). The parameters are
accepted with the rising edge on “activate_BOOL”.
The ramp is interrupted if “interrupt_BOOL=1”.
When the end of the ramp is reached, a BOOL
variable is set on the monitor output. The variable
“ramp_sequence_time_ms_UINT” specifies the
amount of the specified ramp time that has elapsed.
An overshoot of the specified ramp time
(the maximum is the PLC cycle time) is indicated by
the variable “ramp_time_overshoot_ms_UINT”.
Monitor outputs
End_value_attained_BOOL
Message: End of ramp has been reached
0/1
Ramp_sequence_time_ms_UINT
Currently expired ramp time
0 to 65535
Ramp_time_overshoot_ms_UINT
Amount of time by which the specified ramp
time has been exceeded
0 to 65535
Designation
Meaning
Value range
Miscellaneous Function
Blocks
38
03/
99 AW
B
2700-
1365 G
B
Figure 7: Generation of ramps in conjunction with the
command bits “activate” and “interrupt”
Example program:
The example program generates a ramp which has
two sections with different slopes. In the first ramp
phase, the ramp increases from 500 to 4000 with
a ramp time of 20 s. In the second ramp phase,
the ramp increases from 4000 to 6000 with a ramp
time of 5 s.
t
End value
Start value
Ramp value
Activate
Interrupt

Ramp function
39
03/
99 AW
B
2700-
1365 G
B
Use of the function block
“U_rms_ramp” in the program “ramps”
PROGRAM Ramps
VAR
RMS_RAMP : U_RMS_RAMP ;
Reset_BOOL at %I0.0.0.0.0 : BOOL ;
Initialize_ramp1_BOOL : BOOL ;
Initialize_ramp2_BOOL : BOOL ;
End_value_reached_ramp1_BOOL : BOOL ;
Ramp_value_1_2_INT : INT ;
Rising_edge_end_value_ramp1 : R_TRIG ;
Rising_edge_reset : R_TRIG ;
END_VAR
CAL Rising_edge_reset(
CLK :=Reset_BOOL
)
ld
Rising_edge_reset.Q
jmpcn
NO_RESET
ld
1
st
Initialize_ramp1_BOOL
stn
End_value_reached_ramp1_BOOL
NO_RESET:
ld
Initialize_ramp1_BOOL
jmpcn
INITIALIZE_RAMP1
ld
0
st
RMS_RAMP.activate_BOOL
Cal
RMS_RAMP
ld
500
st
RMS_RAMP.Start_value_INT
ld
4000
st
RMS_RAMP.End_value_INT
ld
20000
st
RMS_RAMP.Ramp_time_ms_UINT
ld
1
st
RMS_RAMP.activate_BOOL
ld
0
st
Initialize_ramp1_BOOL
INITIALIZE_RAMP1:

Miscellaneous Function
Blocks
40
03/
99 AW
B
2700-
1365 G
B
ld
Initialize_ramp2_BOOL
jmpcn
INITIALIZE_RAMP2
ld
0
st
RMS_RAMP.activate_BOOL
Cal
RMS_RAMP
ld
4000
st
RMS_RAMP.Start_value_INT
ld
6000
st
RMS_RAMPE.End_value_INT
ld
5000
st
RMS_RAMPE.Ramp_time_ms_UINT
ld
1
st
RMS_RAMP.activate_BOOL
ld
0
st
Initialize_ramp2_BOOL
INITIALIZE_RAMP2:
CAL RMS_RAMP
ld
RMS_RAMP.End_value_attained_BOOL
s
End_value_reached_ramp1_BOOL
CAL Rising_edge_end_value_ramp1(
CLK :=End_value_reached_ramp1_BOOL
)
ld
Rising_edge_end_value_ramp1.Q
st
Initialize_ramp2_BOOL
ld
RMS_RAMP.Ramp_value_INT
st
Ramp_value_1_2_INT
END_PROGRAM
Two-point interpolation
(scaling)
41
03/
99 AW
B
2700-
1365 G
B
Two-point interpolation
(scaling)
U_IP2_INT_interpolation
Interpolation with 2 X/Y interpolation points
and integer values
Prototype of the function block
Meaning of the operands
U_IP2_INT_interpolation
Inputs
Outputs
INT
X_INT
Y_INT
INT
Parameters
BOOL
Suppress_extrapolation_BOOL
INT
X1_INT
INT
X2_INT
INT
Y1_INT
INT
Y2_INT
Designation
Meaning
Value range
Inputs
X_INT
Known x value
–32768 to 32767
Parameters
Suppress_extrapolation_BOOL
For x values outside the interpolation limits,
the following can be set:
0/1
0 =>
1 =>
Extrapolation
Extrapolation is suppressed.
The interpolation limits are output
Miscellaneous Function
Blocks
42
03/
99 AW
B
2700-
1365 G
B
Description
Between the X/Y interpolation points, a linearly
interpolated Y value is calculated for the X value
present at the input. Outside the X/Y interpolation
points, a linearly extrapolated Y value is calculated if
“suppress_extrapolation_BOOL=0”. If
“suppress_extrapolation_BOOL=1”, the Y
interpolation limits are output instead.
Example program:
For the input parameters shown in the example
program below, the input value
“analog_value_4_till_20_mA :=1500” results in the
output value “actual_value :=852”.
X1_INT
X value 1
–32768 to 32767
X2_INT
X value 2
–32768 to 32767
Y1_INT
Y value 1
–32768 to 32767
Y2_INT
Y value 2
–32768 to 32767
Outputs
Y_INT
Interpolated (or extrapolated) Y value
–32768 to 32767
Designation
Meaning
Value range

Two-point interpolation
(scaling)
43
03/
99 AW
B
2700-
1365 G
B
Use of the function block
“U_IP2_INT_interpolation”
in the program “scaling1”
PROGRAM scaling1
VAR
scaling : U_IP2_INT_INTERPOLATION ;
analog_value_4_till_20_mA AT %IAW0.0.0.4 : WORD ;
actual_value : INT ;
END_VAR
ld
analog_value_4_till_20_mA
WORD_TO_INT
st
scaling.X_INT
CAL scaling(
X_INT :=,
suppress_extrapolation_BOOL :=1,
X1_INT :=819,
X2_INT :=4095,
Y1_INT :=0,
Y2_INT :=4095
|
actual_value :=Y_INT)
END_PROGRAM
Miscellaneous Function
Blocks
44
03/
99 AW
B
2700-
1365 G
B
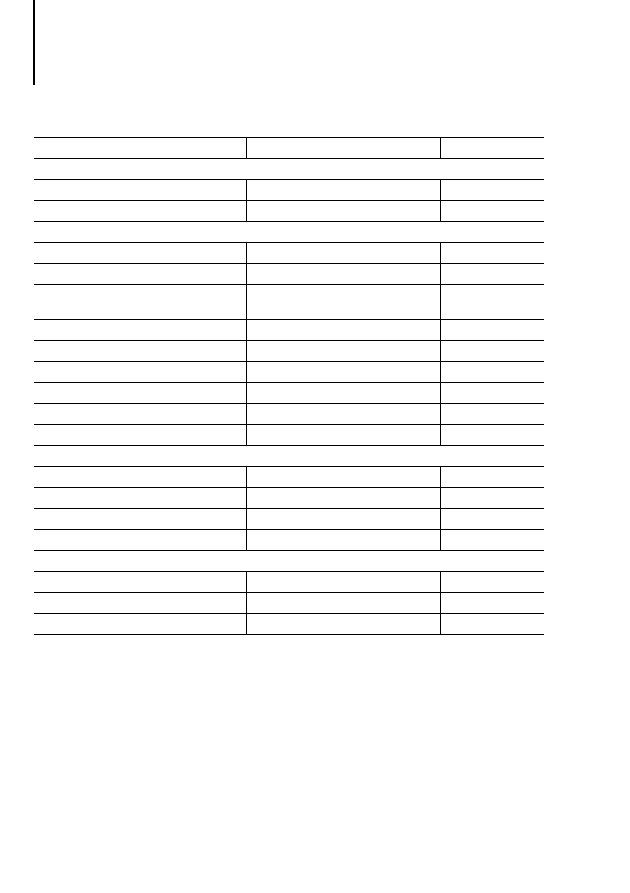
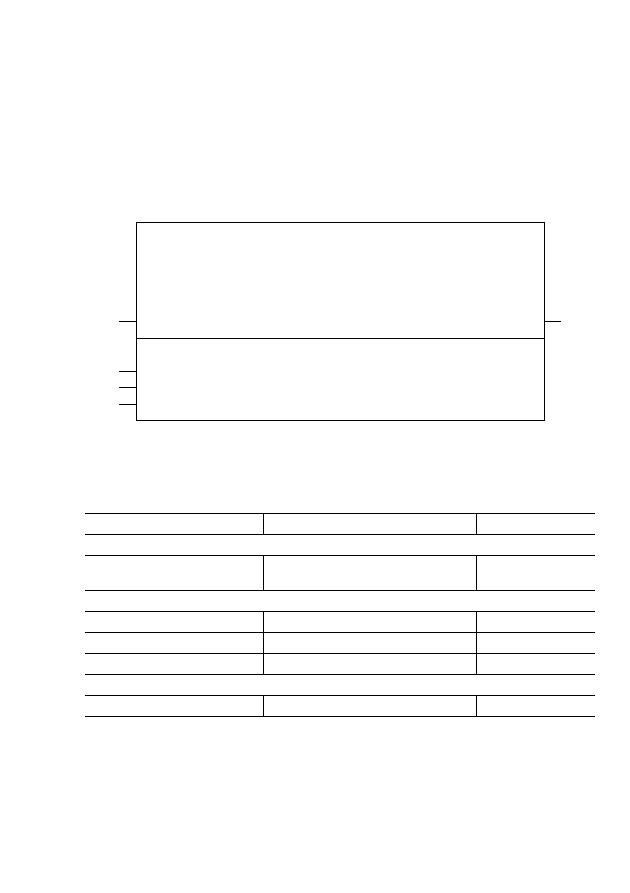
PLC cycle time setpoint
value
(equidistant PLC cycle
times)
U_CYCS_cycletime_setpoint_value
Specify a (constant) required cycle time
Prototype of the function block
Meaning of the operands
Description
The function block enables you to specify a set cycle
time. This cycle time is used if the maximum cycle
times of the user program are smaller than this.
U_CYCS_cycletime_setpoint_value
Inputs
UINT
Cycletime_ms_UINT
Parameters
BOOL
Activate_BOOL
Designation
Meaning
Value range
Inputs
Cycletime_ms_UINT
Required cycle time to be established
1 to 250
Parameters
Activate_BOOL
Activates the function block
0/1
If the PLC cycle time exceeds the specified cycle
time, this does not have any consequences
(the PLC does not switch to Halt).
It merely means that the set cycle time cannot
be achieved.

PLC cycle time setpoint
value (equidistant PLC
cycle times)
45
03/
99 AW
B
2700-
1365 G
B
Example program:
In the example program below, the instructions and
function block calls result in an average cycle time of
approx. 22 ms (± 4 ms). Setting the cycle time to
30 ms then results in a constant cycle time.
Use of the function block
“U_CYCS_cycletime_setpoint_value”
in the program “ms_30”
PROGRAM ms30
VAR
setpoint_cycle_time : U_CYCS_cycletime_setpoint_value ;
END_VAR
(*The calling of other function blocks causes average PLC cycle times of a maximum of
26 ms. The function block “U_CYCS_cycletime_setpoint_value” should be called at the end
of the program*)
CAL setpoint_cycle_time(
activate_BOOL :=1,
cycletime_ms_UINT :=30)
END_PROGRAM

46
03/
99 AW
B
2700-
1365 G
B

47
03/
99 AW
B
2700-
1365 G
B
Index
F
Function blocks
U_2_step_controller ................................................... 21
U_3_step_controller ................................................... 24
U_CYCS_cycletime_setpoint_value ........................... 44
U_IP2_INT_interpolation ............................................. 41
U_PD_three_step_controller ....................................... 15
U_PDM_contactor ...................................................... 29
U_PID_controller ........................................................ 11
U_PT1_filter ................................................................ 33
U_RMS_ramp ............................................................. 36
I
Interpolation ................................................................... 41
M
Mindesteinschaltdauer ................................................... 30
P
PID controller ................................................................. 11
PT1 filter ......................................................................... 33
Pulse duration modulation ............................................. 29
R
Ramp .............................................................................. 36
S
Scaling ........................................................................... 41
Signal smoothing ........................................................... 33
T
Three-step action ........................................................... 15
Three-step controller ..................................................... 24
Two-step controller ........................................................ 21
Document Outline
- Contents
- 1 Basic Information and Technical Data
- 2 Controllers
- PID controller
- PROGRAM zone2
- VAR pid_controller_zone2 : U_PID_CONTROLLER; setpoint_value_zone2 : UINT :=2500; actual_value_zon...
- CAL pid_controller_zone2( setpoint_value_12Bit_UINT :=setpoint_value_zone2, actual_value_12Bit_UI...
- END_PROGRAM
- PROGRAM valve1
- VAR valve_1 : U_PD_three_step_controller; setpoint_value_valve1 : UINT :=2000; actual_value_valve...
- ld actual_value_valve1 WORD_TO_UINT st valve_1.actual_value_12Bit_UINT CAL valve_1( setpoint_valu...
- END_PROGRAM
- 3 Pulse Duration Modulator (PDM)
- 4 Miscellaneous Function Blocks
- PT1 signal smoothing filter
- Ramp function
- Two-point interpolation (scaling)
- PLC cycle time setpoint value (equidistant PLC cycle times)
- PROGRAM ms30
- VAR setpoint_cycle_time : U_CYCS_cycletime_setpoint_value ; END_VAR
- (*The calling of other function blocks causes average PLC cycle times of a maximum of 26 ms. The ...
- CAL setpoint_cycle_time( activate_BOOL :=1, cycletime_ms_UINT :=30)
- END_PROGRAM
- Index
Wyszukiwarka
Podobne podstrony:
[ebook] Assembler Intel Architecture Optimization Reference Manual [pdf]
PostHaste for GibbsCAM Format Reference Manual 50408g
Bash Reference Manual [EN]
PostHASTE for GibbsCAM 2005 Format Reference Manual
( SPC ) STASTICAL PROCESS CONTROL REFERENCE MANUAL
The GNU C Reference Manual
Lean Excel Top Functions Quick Reference Guide with 500 Examples! by Scott Ratliff
PostHASTE Formatting Reference Manual
operator reference manual kongsberg maritime sdp
alesis dm5 instrukcja reference manual 163339
Modern Electornic Circuits Reference Manual John Markus
OpenGL Reference Manual
PS4 Sucosoft S40 Library Manager h1366g
C Reference Manual
więcej podobnych podstron