
inżynieria ruchu
Magazyn Autostrady 10/2009
24
Rozwiązania telematyczne
w systemach sterowania ruchem drogowym
Gwałtowny wzrost popularności systemów usprawniających ruch w miastach, pracujących z wykorzysta-
niem pozyskanych danych, które następnie są przetwarzane w określonego rodzaju informacje lub procesy
automatyczne, przyczynił się do ukształtowania nowej terminologii używanej w celu opisania wymienionych
procesów oraz elementów struktury, z jakich się one składają. Jednym z nich jest telematyka.
Tomasz Wróblewski, ADT Fire & Security
Termin „telematyka” powstał z połączenia dwóch słów: „telekomu-
nikacja” i „informatyka”. Pojęciem tym określa się zespół rozwią-
zań telekomunikacyjnych i informatycznych w procesie zarządza-
nia systemami składającymi się z elementów, dzięki którym mogą
one spełniać swoje funkcje. Zakres telematyki obejmuje zbieranie,
transportowanie i przetwarzanie danych, algorytm przetwarzają-
cy różnego rodzaju dane oraz uzyskaną w ten sposób informację
przekazywaną użytkownikowi lub niezbędną w celu wykonania
operacji automatycznej.
System pracujący z wykorzystaniem rozwiązań telematycznych
powinien zostać zaprojektowany tak, aby w przypadku zaistnie-
nia zakłóceń w jego pracy możliwa była ingerencja operatorów
sprawujących nadzór nad prawidłowym działaniem rozwiązania.
Dzięki temu w sytuacji wystąpienia nieprzewidzianych zdarzeń,
takich jak np. kolizja drogowa, lub zaplanowanych akcji, takich
jak np. imprezy masowe, operatorzy mają możliwość nadania od-
powiedniego priorytetu pojazdom uprzywilejowanym, zapewniając
im bezpieczny i szybki przejazd przez skrzyżowania. Operatorzy
mają także możliwość natychmiastowej reakcji, odpowiedniej ka-
libracji systemu oraz usuwania ewentualnych usterek. Admini-
strują oni cały system i wprowadzają odpowiednie modyfikacje
programów sterowania na poszczególnych skrzyżowaniach, jeśli
jest to konieczne.
Jedną z najistotniejszych funkcji systemów telematycznych
jest zarządzanie informacją – uzyskiwaną, przetwarzaną i prze-
kazywaną przez system. Dobór odpowiednich rozwiązań jest
uzależniony od różnorodności i ilości zebranych danych (infor-
macje o zatłoczeniach, kolizjach, wypadkach itd. przekazywane
są do centrum zarządzania ruchem) oraz od wielowątkowości in-
formacji wyjściowych. Systemy takie projektowane są z uwzględ-
nieniem możliwości ich łatwej rozbudowy. Ma to niewątpliwy
wpływ na swobodę przepływu danych, szczególnie w przypadku
systemów telematycznych rozbudowywanych z wykorzystaniem
różnorodnych rozwiązań (np. zróżnicowane typy sterowników sy-
gnalizacji świetlnej, urządzenia różnych producentów itp.). Roz-
wiązania telematyczne stosuje się w systemach, których elementy
Fot. 1. Centrum sterowania ruchem
Summary
The rapid growth in popular-
ity of traffic control systems,
which base on the gathered
data then being converted into
particular pieces of informa-
tion or automatic processes,
caused the development of
new terminology describing
the said processes and their
structural elements. Telematics
is one of such terms.
inżynieria ruchu
www.autostrady.elamed.pl
25
są rozproszone, oraz w takich, w których elementy zintegrowane
są w systemie nadrzędnym.
Różne zastosowania
systemów telematycznych
Rozwiązania telematyczne są powszechnie stosowane w różnych
sektorach, np. w medycynie, administracji czy edukacji. Znajdują
także zastosowanie w inżynierii ruchu, przy tworzeniu systemów
zarządzania ruchem. Ich działanie opiera się wówczas na groma-
dzeniu różnego rodzaju danych, przetwarzaniu ich w centrum
zarządzania ruchem (w zależności od struktury dane te mogą
być przetwarzane również przez lokalne sterowniki), a następ-
nie generowaniu określonych informacji i procesów automa-
tycznych. W praktyce rozwiązania telematyczne są wykorzystane
we wszystkich aspektach pracy zintegrowanych systemów zarzą-
dzania ruchem.
Skala zastosowanych rozwiązań telematycznych jest uzależnio-
na od wielkości systemu: zarówno od jego rozległości obszarowej,
ilości oraz różnorodności danych, jak i od informacji przekazy-
wanej uczestnikom ruchu, a także możliwości obsługi w cen-
trum zarządzania ruchem. Informację taką stanowią wyświetlane
na skrzyżowaniach sygnały, komunikaty umieszczane na znakach
i tablicach zmiennej treści, dynamiczne informacje na przystan-
kach oraz w pojazdach komunikacji miejskiej.
Zintegrowany system zarządzania ruchem
– zasada działania
Na zintegrowany system zarządzania ruchem składa się od jedne-
go do kilku współpracujących ze sobą podsystemów. Mogą być
to podsystemy sterowania ruchem za pomocą sygnalizacji świetl-
nej, zarządzania komunikacją miejską, informacji dla kierowców
w postaci znaków i tablic zmiennej treści, informacji pasażerskiej
oraz wiele innych. Rozwiązania telematyczne zastosowane w roz-
budowanych systemach zarządzania ruchem są niezwykle rozległe
i skomplikowane – działają przy wykorzystaniu wielu zróżnico-
wanych informacji. Szczegółowemu przedstawieniu ich specyfiki
posłuży przykład systemu sterowania ruchem za pomocą sygna-
lizacji świetlnej.
Podobnie jak każde rozwiązanie telematyczne, system sterujący ru-
chem za pomocą sygnalizacji świetlnej powinny cechować skalowal-
ność i otwartość, oznaczająca w tym przypadku możliwość współ-
pracy z systemami innych producentów. Skuteczność rozwiązań
telematycznych jest również uzależniona od czasu reakcji na zmie-
niającą się sytuację w ruchu – powinna być ona natychmiastowa.
Poprawnie działający system spełniający swoje funkcje powinien ste-
rować ruchem w oparciu o skuteczny algorytm obliczeniowy, steru-
jący pracą sygnalizacji świetlnej. Przykładem takiego systemu może
być między innymi system sterowania ruchem SCATS (The Syd ney
Coordinated Adaptive Traffic System
). Rozwiązanie to usprawnia ruch
już w ponad 130 miastach, na ponad 28 tys. skrzy żowań na ca-
łym świecie, wykorzystując zróżnicowane systemy detekcyjne oraz
współpracując z różnymi typami sterowników.
Rozwiązania telematyczne funkcjonują na podstawie danych,
które są gromadzone w celu ich późniejszego przetworzenia.
W przypadku systemu sterowania ruchem są to dane dotyczące
warunków ruchu pojazdów. W zależności od algorytmu działania
takiego systemu mogą być to dane dotyczące liczby pojazdów, ich
struktury rodzajowej (procentowy udział pojazdów osobowych,
dostawczych, ciężarowych w danym strumieniu ruchu) lub na-
wet liczby i długości odstępów czasowych (SCATS nie liczy po-
jazdów – zlicza odstępy czasowe między nimi i ich długość), jak
ma to miejsce w przypadku wymienionego wcześniej systemu.
Dane te są zbierane za pomocą różnego rodzaju urządzeń de-
tekcyjnych, takich jak: pętle indukcyjne, kamery wideo, czujniki
podczerwieni czy detektory pneumatyczne. Typ zastosowanego
detektora zależy od warunków i organizacji ruchu w danym miej-
scu, a także od rodzaju nawierzchni. Montowanie detektorów pę-
tlowych nie jest np. wskazane pod nawierzchniami brukowanymi
lub kostkowanymi – każde odkształcenie nawierzchni grozi w tym
przypadku uszkodzeniem detektora. Natomiast zastosowanie de-
tektorów wideo umożliwia stworzenie kilku wirtualnych detekto-
rów pętlowych. Dzięki temu liczba urządzeń detekcyjnych zostaje
ograniczona, jednak w czasie zachmurzenia, opadów atmosferycz-
nych lub niedostatecznego oświetlenia detektory te mogą genero-
wać błędy w ocenie warunków ruchu.
Dane pozyskiwane z detektorów przesyłane są następnie do ste-
rowników sygnalizacji świetlnej. Tam, w zależności od architek-
tury systemu, są one przetwarzane lub kierowane do centrum
sterowania ruchem. Opis pierwszego z wymienionych przypad-
ków dotyczy systemu o architekturze rozproszonej – oznacza
to, że decyzje o planie sterowania są generowane automatycznie
przez sterowniki lokalne, w odniesieniu do ogólnego planu ste-
rowania obszarowego, dopasowanego do warunków ruchu na da-
nym obszarze przez system sterowania. Struktura taka redukuje
ryzyko awarii w łączności między centrum sterowania a sterow-
nikami sygnalizacji świetlnej, a także minimalizuje liczbę danych
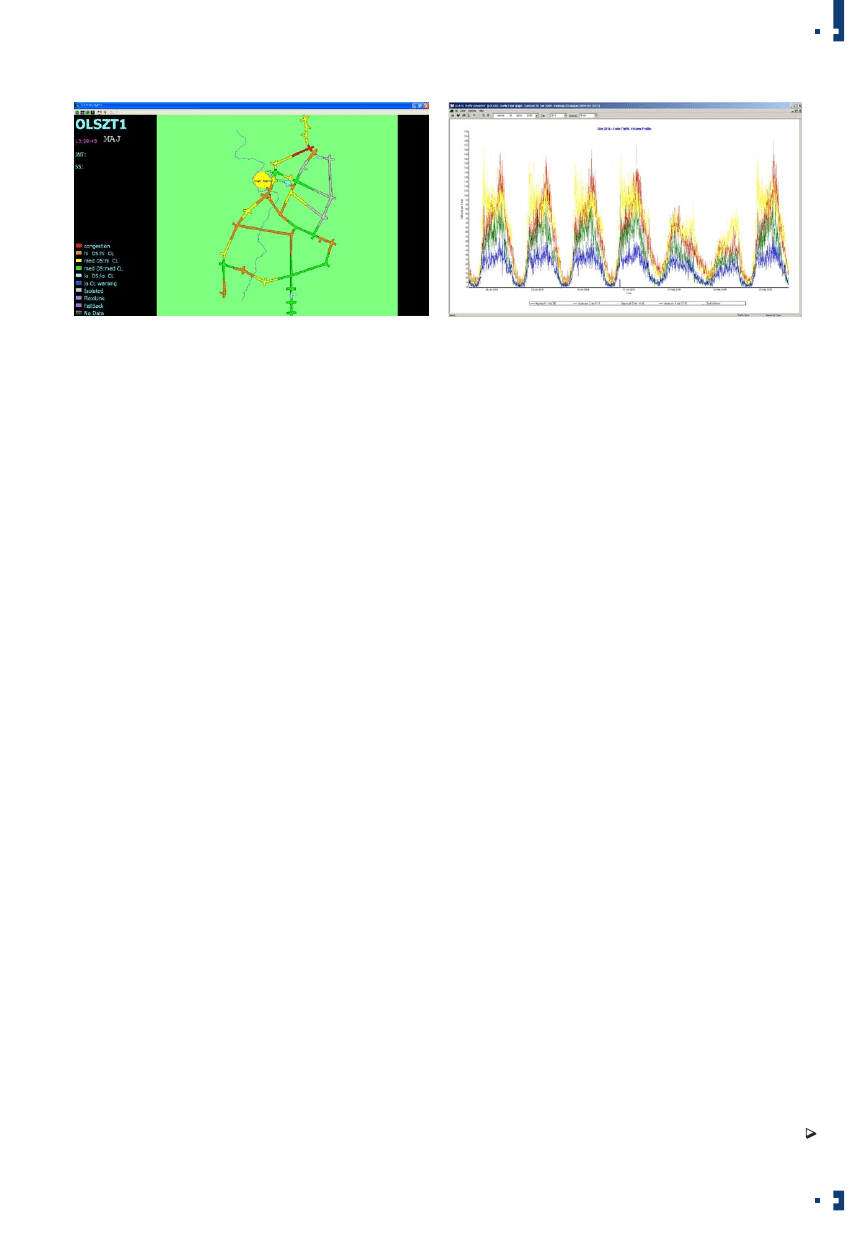
Fot. 2. Wizualizacja warunków ruchu w zależnosci od liczby pojazdów
Fot. 3. Wykres obrazujący natężenie ruchu w poszczególnych dniach miesiąca
inżynieria ruchu
Magazyn Autostrady 10/2009
26
przesyłanych między centrum sterowania ruchem a sterownika-
mi. Gromadzone dane mogą być przesyłane na wiele sposobów
– za pomocą łączności kablowej, światłowodowej, GPRS, a obec-
nie także internetu. Wybór medium przesyłu danych jest uzależ-
niony od wielu czynników, takich jak: dostępność sieci bezprze-
wodowego przesyłu danych, odległość skrzyżowań od centrum
sterowania ruchem, wielkość obszaru systemu, wysokość zabu-
dowy miejskiej (możliwość zakłóceń przesyłu danych w sposób
bezprzewodowy – np. GPRS lub bezprzewodowy internet), roz-
proszenie skrzyżowań (duże odległości pomiędzy skrzyżowania-
mi powodują, iż instalacja sieci kablowej (światłowodowej) może
być bardzo kosztowna).
Serce każdego systemu pracującego z wykorzystaniem rozwią-
zań telematycznych stanowi obiekt lub algorytm przetwarzający
zdobyte dane i generujący na ich podstawie odpowiednie infor-
macje lub procesy automatyczne. Rozwiązanie takie zastosowane
jest również w przypadku systemów sterowania ruchem. W sys-
temach takich podstawowym elementem jest serwer gromadzą-
cy dane przesyłane z detektorów warunków ruchu oraz program
sterujący pracą sygnalizacji świetlnej na skrzyżowaniach, na pod-
stawie stworzonego wcześniej algorytmu. Do transmisji danych
wykorzystywane są różnego rodzaju protokoły stosowane przez
różnych producentów. Z uwagi na fakt, iż rozwiązania telematycz-
ne powinny zapewnić możliwość rozbudowy systemu, muszą to
być protokoły otwarte, umożliwiające współpracę systemów róż-
nych producentów. W centrum sterowania ruchem zlokalizowane
są również stanowiska operatorskie. Dzięki zastosowaniu jedne-
go interfejsu przedstawione są tam informacje o pracy systemu
– o aktualnie wyświetlanych programach sygnalizacji, głównych,
skoordynowanych ciągach komunikacyjnych, warunkach ruchu
lub ewentualnych uszkodzeniach elementów systemu. Informa-
cje te przedstawione są za pomocą mapy GIS, a operatorzy mają
możliwość ingerencji w pracę systemu – np. ustawienie priorytetu
przejazdu dla pojazdów uprzywilejowanych, skoordynowanie pracy
programów sygnalizacyjnych na skrzyżowaniach w celu rozłado-
wania zatłoczenia lub wysłania serwisu w miejsce awarii oraz wie-
le innych czynności, których liczba jest uzależniona od wielkości
systemu. W przypadku kiedy system zarządzania ruchem złożony
jest dodatkowo z innych podsystemów (np. zarządzania komuni-
kacją miejską, informacja dla kierowców, informacja pasażerska),
informacja o ich pracy również przedstawiona jest na mapie GIS,
a operatorzy centrum sterowania ruchem mają możliwość moni-
torowania i ingerencji w ich pracę, jeżeli jest to konieczne.
Wykorzystanie telematyki
w systemach sterowania ruchem
Systemy pracujące z wykorzystaniem rozwiązań telematycznych
cechują się możliwością szybkiej reakcji na zmiany warunków,
w jakich funkcjonują, oraz maksymalną elastycznością dopasowa-
nia parametrów pracy do aktualnej sytuacji. Funkcjonalność taką
powinny wykazywać również systemy sterowania ruchem. Warunki
ruchu w sieci ulic charakteryzują się określoną regularnością, jaką
można zaobserwować np. w określonych porach dnia, w wybrane
dni tygodnia, w określonych kierunkach ruchu. Są to np. godziny
szczytów przewozowych, występujące mniej więcej o tych samych
porach dnia, czy ruch pojazdów w stronę granic miasta w czasie
weekendów. Jednak zdarzają się także sytuacje nieprzewidywalne,
takie jak kolizje, wypadki, demonstracje, jak również pojedynczo
występujące zdarzenia zaplanowane, takie jak: roboty drogowe,
imprezy masowe czy czasowe zmiany organizacji ruchu. W tych
przypadkach niezbędna jest błyskawiczna reakcja systemu stero-
wania ruchem na zmiany kierunków potoków pojazdów w ruchu
drogowym, na występujące zatłoczenia (potocznie nazywane „kor-
kami”) czy objazdy. Zadanie takie spełniają systemy sterowania
ruchem pracujące w czasie rzeczywistym – na podstawie zgroma-
dzonych danych na bieżąco aktualizują programy sterowania sy-
gnalizacją świetlną na poszczególnych skrzyżowaniach. Aby za-
danie to było możliwe do wykonania, algorytmy sterujące muszą
posiadać elastyczne parametry sterowania (długość cyklu, długość
i kolejność faz, zmienne długości wiązek koordynacyjnych, tzw.
offsetów). Dzięki temu będą mogły błyskawicznie dostosować się
do nagłych zmian w warunkach przepływu pojazdów.
Stworzone przez algorytm systemy sterowania ruchem (również
w zależności od struktury systemu pracujące centralnie lub tak-
że lokalnie w sterownikach pod nadzorem jednostki centralnej –
struktura rozproszona) oraz programy pracy sygnalizacji świetlnej
przesyłane są do modułów logicznych sterowników, a następnie
są realizowane przez sygnalizatory sterujące ruchem, w zależności
od jego warunków. Sterowniki są elementami systemu sterowania
również wykorzystującymi rozwiązania telematyczne. W nich na-
stępuje przetworzenie nadesłanej z centrum sterowania informacji
(lub informacji pobranej bezpośrednio z detektorów ruchu, jeśli
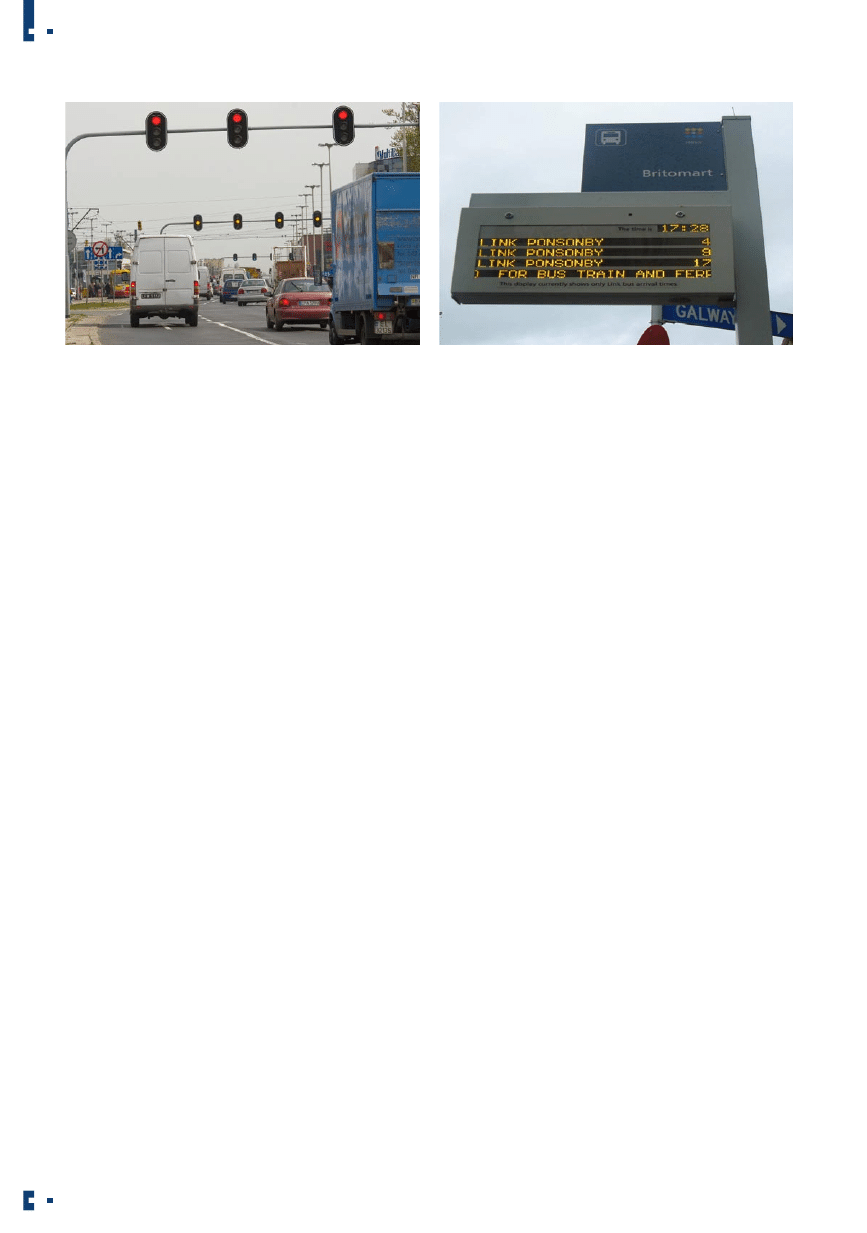
Fot. 4. Praca sygnalizacji w zależności od warunków ruchu
Fot. 5. Informacja pasażerska
inżynieria ruchu
www.autostrady.elamed.pl
27
sterowniki pracują lokalnie z narzuconymi już przez jednostkę
centralną zakresami pracy obszarowej) na automatyczną sekwencję
wyświetlania sygnałów. Ponadto sterownik, jako element systemu
sterowania ruchem pracującego przy wykorzystaniu rozwiązań te-
lematycznych, powinien umożliwiać pracę algorytmów różnych
producentów. Gwarantowałoby to praktycznie nieograniczoną
możliwość rozbudowy systemów sterowania ruchem oraz bez-
zakłóceniowy przepływ danych. Umożliwienie pracy algorytmu
sterowania ruchem na danym sterowniku może być również zre-
alizowane przez producenta w postaci specjalnego urządzenia.
Urządzenie to to tzw. moduł komunikacyjny, który sprawia, że
algorytm sterowania ruchem wpływa na logikę pracy sterownika.
Dzięki takiemu rozwiązaniu wymiana sterownika na kompatybilny
z danym algorytmem sterowania ruchem nie jest konieczna.
Systemy sterowania ruchem praktycznie nie mogłyby istnieć bez
rozwiązań telematycznych. Ich praca opiera się na pozyskiwaniu
informacji – w tym przypadku o warunkach ruchu i przetwarzaniu
gromadzonych danych poprzez algorytm sterowania sygnalizacją
świetlną – oraz przekazywaniu informacji kierowcom za pomocą
sygnałów świetlnych na skrzyżowaniach. Systemy takie najczęściej
stanowią element zintegrowanych systemów zarządzania ruchem,
gdzie współpracują z innymi podsystemami i komunikują się
z nimi. Przykładem może być możliwość stworzenia priorytetu
dla pojazdów komunikacji miejskiej podczas pokonywania przez
nie skrzyżowań. W tym przypadku stworzenie opisanego udogod-
nienia dla pojazdów komunikacji zbiorowej polega na odpowied-
nim dostosowywaniu pracy sygnalizacji świetlnej w momencie, gdy
do skrzyżowania zbliża się np. tramwaj. System zarządzania komu-
nikacją miejską monitoruje na bieżąco ruch pojazdów komunika-
cji miejskiej i w momencie „wykrycia” tramwaju w odpowiedniej
odległości od skrzyżowania zgłasza tę informację do systemu stero-
wania ruchem. System ten odpowiednio modyfikuje program ste-
rowania na danym skrzyżowaniu, wyświetlając dla tramwaju sygnał
zezwalający na ruch. Priorytet taki może być wielostopniowy, w za-
leżności od stopnia opóźnienia pojazdu komunikacji zbiorowej.
Najwyższy stopień przyznawany jest pojazdom najbardziej opóź-
nionym, tj. takim, które bezzwłocznie powinny otrzymać sygnał
zezwalający na przejazd. System sterowania ruchem na podstawie
uzyskanych danych o warunkach ruchu analizuje także możliwość
przydzielenia priorytetu. Jeśli warunki ruchu nie są sprzyjające, zo-
stanie udzielony priorytet np. o jeden stopień niższy, lub zostanie
pominięty w celu rozładowania zatłoczeń spowodowanych przez
zbyt dużą liczbę pojazdów indywidualnych.
Rozbudowa systemów telematycznych
Systemy telematyczne można rozbudowywać nie tylko obszaro-
wo, ale również wprowadzając dodatkowe funkcje, podobnie jak
w przypadku systemów sterowania i zarządzania ruchem. System
powstaje w wersji testowej, obejmującej kilka skrzyżowań – jeśli się
sprawdzi, jest on rozbudowywany nie tylko obszarowo, ale także
o dodatkowe funkcje: zarządzanie incydentami, monitoring zatło-
czeń, warunków pogodowych czy systemy obliczające czas przejaz-
du pomiędzy wybranymi punktami w sieci. Otwartość tych rozwią-
zań umożliwia dostęp do tych wszystkich modułów poprzez jeden
interfejs użytkownika, rozdzielony na kilka stanowisk operatorskich
(w zależności od wielkości systemu). W miarę rozbudowy systemu,
zarówno pod względem obszarowym, jak i funkcjonalnym, możliwe
jest zwiększanie liczby stanowisk operatorskich, a także rozdziela-
nie różnych funkcji, np. stanowiska nadzoru systemu zarządzania
komunikacją miejską, nadzoru systemu sterowania ruchem oraz
wiele innych. Wszystkie stanowiska są połączone z interfejsem sys-
temu zarządzania ruchem za pomocą sieci LAN.
Podsumowanie
Na podstawie przytoczonych powyżej spostrzeżeń systemy stero-
wania i zarządzania ruchem bez wahania można określić jako sys-
temy wykorzystujące rozwiązania telematyczne w każdym aspekcie
swego działania. Dzięki zaawansowanym rozwiązaniom telematycz-
nym możliwe jest zwiększenie przepustowości sieci miejskich ulic
bez konieczności ich kosztownej rozbudowy. Systemy sterowania
wpływają również na zwiększenie bezpieczeństwa ruchu (np. po-
przez wykluczenie możliwości ruchu kolizyjnych strumieni uczest-
ników ruchu w jednej fazie), a także na zmniejszenie zużycia paliwa
i emisji zanieczyszczeń. Wprowadzenie rozwiązań telematycznych
pozwoliło na optymalne wykorzystanie sygnału zielonego dla naj-
bardziej obciążonych strumieni ruchu drogowego oraz umożliwiło
skrócenie czasu podróży nie tylko pojazdów indywidualnych, ale
także komunikacji miejskiej, poprawiając tym samym atrakcyjność
oferty przewozowej. Z pewnością nie pozostanie to bez wpływu
na decyzję części zmotoryzowanych mieszkańców obszarów miej-
skich, którzy postanowią zrezygnować z podróży pojazdem pry-
watnym na rzecz komunikacji miejskiej.
q
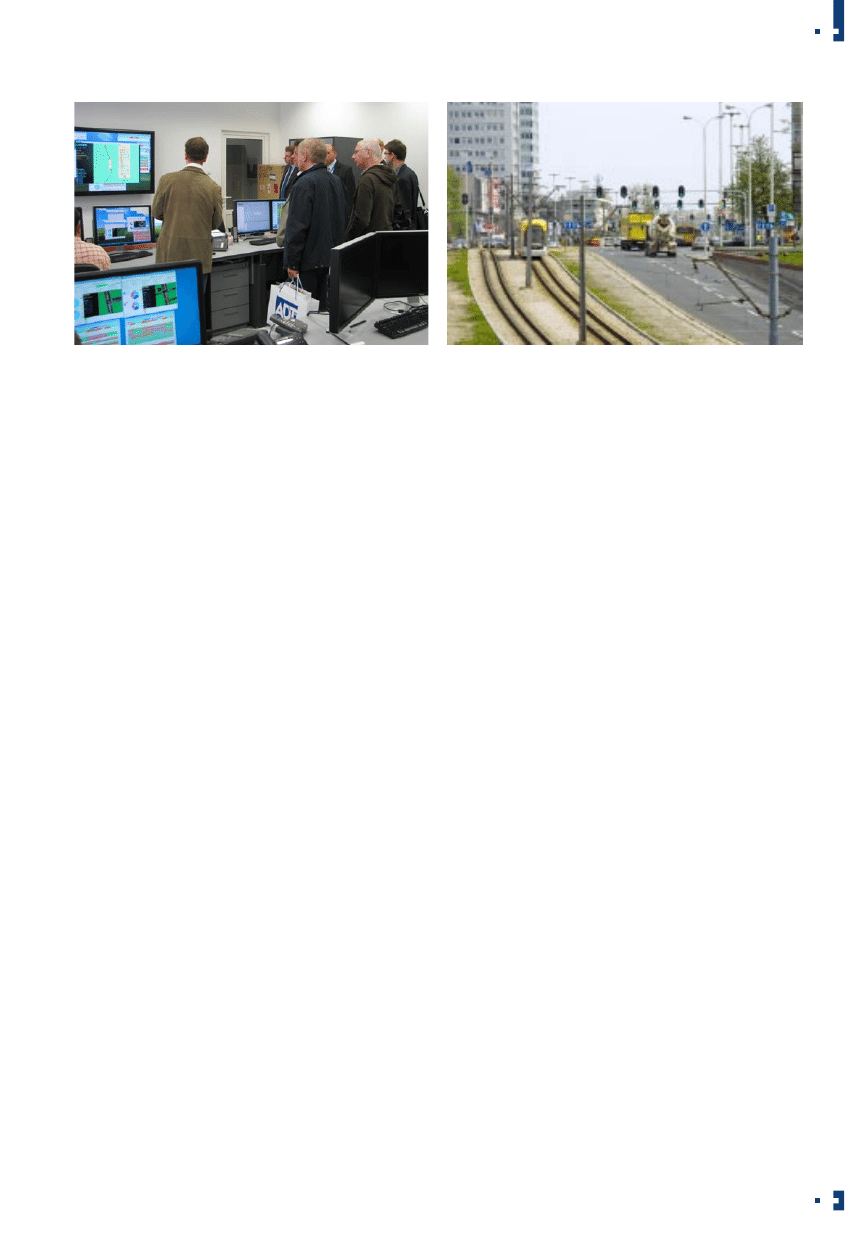
Fot. 6. Spotkanie z eurodeputowanymi w Łodzi
Fot. 7. Praca sygnalizacji świetlnej w mieście
Wyszukiwarka
Podobne podstrony:
System informacyjny jako ogniwo systemu sterowania i zarzadzania 18 05
Jak rozwiązywać problemy ze sterownikami sprzętu i oprogramowaniem w systemie Windows XP
J Kossecki, Cele i metody badania przeszłości w różnych systemach sterowania społecznego
2009-09-20 Inf- ćwiczenia 1, 5 rok, 1 semestr, informatyka
2009 09 11 232327
KOMPUTEROWE SYSTEMY STEROWANIA Nieznany
2009 09 11 223732
2009 09 12 005407
mikroprocesorowy system sterowania skladem mieszanki silnika zasilanego gazem plynnym typ al700
Liga zadaniowa 16 II 2009, Liga zadaniowa, Archiwalne + rozwiązania, 2008 - 2009
Innowacyjne rozwiazanie telematyczne dla samochod
PnK RWK promocja Zmien na Play na Karte Rok Waznosci Konta [2012 09 25]
Opracowanie pytań na egzamin z Systemów Sterowania Maszyn i Robotów u Salamandry
Labolatorium projektowania układów i systemów sterowania, Narzędzia komputerowego wspomagania projek
Kosmetologia 10.09.25, SEMESTR 1(1)
NWCA Karta katalogowa 2009 09 (PL) i
2009 09 11 231132
Czasy miedzyzielone III-I, Studia Mgr, II semestr mgr, System sterowania ruchem
więcej podobnych podstron